UNIVERSIDADE ESTADUAL PAULISTA Faculdade de Ciências e Tecnologia Programa de Pós-Graduação em Ciências Cartográficas
|
|
|
- Natan Fragoso Chaves
- 6 Há anos
- Visualizações:
Transcrição

1 unesp UNIVERSIDADE ESTADUAL PAULISTA Faculdade de Cêncas e Tecnologa Programa de Pós-Graduação em Cêncas Cartográfcas TÉCNICAS PARA A EXTRAÇÃO AUTOMÁTICA DE FEIÇÕES RETAS EM IMAGENS DIGITAIS Almr Olvette Artero Orentador: Prof. Dr. Antono Mara Garca Tommasell Dssertação apresentada ao Programa de Pós- Graduação em Cêncas Cartográfcas para a obtenção do Título de Mestre em Cêncas pela Faculdade de Cêncas e Tecnologa da Unversdade Estadual Paulsta. Presdente Prudente 999
2 unesp UNIVERSIDADE ESTADUAL PAULISTA CAMPUS DE PRESIDENTE PRUDENTE FACULDADE DE CIÊNCIAS E TECNOLOGIA ALMIR OLIVETTE ARTERO TÉCNICAS PARA A EXTRAÇÃO AUTOMÁTICA DE FEIÇÕES RETAS EM IMAGENS DIGITAIS Dssertação apresentada ao Curso de Pós-Graduação em Cêncas Cartográfcas da Faculdade de Cêncas e Tecnologa da UNESP, como requsto parcal para a obtenção do título de Mestre em Cêncas Cartográfcas (Área de Concentração: Aqusção, Análse e Representação de Informações Espacas). Orentador: Prof. Dr. Antono Mara Garca Tommasell PRESIDENTE PRUDENTE 999
3 Fcha catalográfca A825t Artero, Almr Olvette Técncas para a extração automátca de feções retas em magens dgtas / Almr Olvette Artero.-- Presdente Prudente:UNESP/FCT, 999. xv, 7p. : l., 30cm. Dssertação (Mestrado).-- UNESP, Faculdade de Cêncas e Tecnologa, Presdente Prudente, Processamento dgtal de magens. 2. Detecção automátca de lnhas retas. 3. Segmentação. 4. Extração de feções. 5. Fotogrametra Dgtal. I.Título. CDD(8 ed.) 59.7
4 TERMO DE APROVAÇÃO ALMIR OLIVETTE ARTERO TÉCNICAS PARA A EXTRAÇÃO AUTOMÁTICA DE FEIÇÕES RETAS EM IMAGENS DIGITAIS Comssão Julgadora Dssertação para a obtenção do título de Mestre Presdente e Orentador Examnador Examnador
5 v Ao meu pa Francsco Artero, mnha mãe Helena e mnha rmã Angélca, por estarem sempre ao meu lado e também ao Arqumedes por me dstrar.
6 v AGRADECIMENTOS Agradeço ao meu orentador Professor Antono M. G. Tommasell, por compartlhar suas déas e pesqusas, me orentando em todas as etapas deste trabalho, e me recebendo em sua casa, abrndo mão de suas horas de descanso. Aos meus professores Alur Porfro Dal Poz, Arlete A. C. Meneguette, Ervaldo Antono da Slva, João Fernando C. da Slva, João Francsco Galera Monco, Júlo K. Hasegawa, Mauríco Galo, Messas Meneguete Júnor, Nlton Nobuhro Ima, por me transmtrem o conhecmento e pela amzade; Ao professor Ner Alves, pela sua amzade, sempre me ncentvando a contnuar; À Faculdade de Cêncas e Tecnologa Unesp; Aos colegas de curso; Aos funconáros do Campus; Aos amgos da Telefonca;
7 v SUMÁRIO FOLHA DE ROSTO FICHA CATALOGRÁFICA TERMO DE APROVAÇÃO DEDICATÓRIA AGRADECIMENTOS SUMÁRIO LISTA DE FIGURAS LISTA DE TABELAS RESUMO ABSTRACT Págna v v v x xv xv xv CAPITULO - INTRODUÇÃO. CONSIDERAÇÕES INICIAIS.2 ESTRUTURA DO TRABALHO 3 CAPITULO 2 - ETAPAS DO PROCESSO DE EXTRAÇÃO DE FEIÇÕES 5 2. CONSIDERAÇÕES INICIAIS Imagens analógcas e magens dgtas Vznhança em magens dgtas Operações pontuas e a convolução de magens ETAPA DE SUAVIZAÇÃO Fltro passa-baxa Fltro da medana Fltro da medana com análse de varânca ETAPA DE DETECÇÃO DE FEIÇÕES Detecção de pontos solados 3
8 v Detecção de lnhas soladas Bordas em magens Operador de Prewtt Operador de Sobel Operadores de Nevata e Babu Comparação da efcênca de operadores LIMIARIZAÇÃO (THRESHOLDING) P-Tle Método de Otsu Método de Pun Método de Kapur, Sahoo e Wong Método de Johannsen e Blle Método do Trângulo Efcênca dos métodos globas ETAPA DE AFINAMENTO DE BORDAS (THINNING) Método da supressão não máxma ETAPA DE CONEXÃO (LINKING) A Transformada de Hough Agrupamento θ-ρ Método da varredura e rotulação (scan & label) Elmnação de lnhas nsgnfcantes Conexão de segmentos colneares AJUSTAMENTO DE RETAS Introdução ao método dos mínmos quadrados (M.M.Q.) Problema com o M.M.Q Aproxmação de polgonas 5
9 v CAPITULO 3 - IMPLEMENTAÇÃO E TESTE DE UM AMBIENTE PARA A 53 EXTRAÇÃO DE LINHAS RETAS 3. O SISTEMA DESENVOLVIDO CONSTRUÇÃO DA IMAGEM PADRÃO MODIFICAÇÃO DO SINAL ETAPA DE SUAVIZAÇÃO ETAPA DE DETECÇÃO DE FEIÇÕES Método para a construção das máscaras de Nevata e Babu ETAPA DE LIMIARIZAÇÃO Método de Otsu modfcado ETAPA DE AFINAMENTO DE BORDAS Supressão não máxma generalzada ETAPA DE CONEXÃO Rotulação por nundação Determnação dos pontos extremos dos segmentos Conexão dos segmentos colneares Correção das dreções dos segmentos 8 CAPITULO 4 - RESULTADOS EXPERIMENTAIS GERAÇÃO DE UMA IMAGEM PADRÃO EXPERIMENTOS COM A IMAGEM PADRÃO EXPERIMENTOS COM IMAGENS REAIS 97 CAPÍTULO 5 - CONCLUSÕES E RECOMENDAÇÕES 3 REFERÊNCIAS BIBLIOGRÁFICAS 5
10 x LISTA DE FIGURAS Págna Vznhança-4, Vznhança-8 e Vznhança Operação de convolução sobre magens dgtas. 9 3 Exemplos de fltros passa baxa no domíno do espaço. 0 4 Aplcação de um Fltro da méda 3x sobre uma lnha da magem. 0 5 Aplcação de um Fltro da medana 3x sobre uma lnha da magem. 6 Comparação de resultados obtdos com os fltros da méda e medana usando janelas de tamanho 3 e 5. 7 Fltro da medana com a análse da varânca. 2 8 Máscara utlzada para detectar pontos solados. 3 9 Máscaras que podem ser utlzadas para detectar lnhas soladas nas dreções 0 o, 45 o, 90 o e -45 o. 0 Imagem com descontnudade, Snal da descontnudade, prmera dervada do snal e segunda dervada do snal. Máscaras utlzadas no detector de Prewtt. 5 2 Máscaras utlzadas no detector de Sobel. 5 3 Determnação da Magntude dos gradentes e também do ângulo. 6 4 Máscaras utlzadas pelo operador de Nevata e Babu. 7 5 Imagem orgnal, Hstograma obtdo e Imagem obtda após aplcação do lmar T. 6 Imagem orgnal, Hstograma, Imagem obtda com a aplcação do lmar e Imagem obtda com a aplcação do lmar 2. 7 Imagem de bordas e Hstograma da magem. 2 8 Crtéro utlzado para a determnação do valor de lmar, pelo Método do Trângulo. 9 Detalhe da borda, afnamento por métodos de afnamento bnáro e consderando o ponto de maor magntude que melhor representa a localzação da borda. 20 Dreções consderadas no método de afnamento por na supressão não máxma. 2 Processo de afnamento de bordas Detalhe da localzação dos pontos a serem nterpolados
11 x 23 Localzação da posção do crculo de rao conhecdo passando por um conjunto de pontos. 24 Posção dos pontos no espaço x-y e das retas possíves sobre estes Transformação entre os espaços de parâmetros x-y e a-b (pela Transformada de Hough). Pontos no espaço x-y, e Lnhas no espaço a-b. 26 Algortmo para a Transformada de Hough no espaço a-b Influênca do alasng na determnação da dreção dos gradentes Utlzando de um conjunto de lnhas com nclnações próxmas a dreção do ponto. 29 Pontos no espaço x-y e Transformada de Hough utlzando a parametrzação ρ- θ. 30 Algortmo para a Transformada de Hough Problema de falsos pcos na Transformada de Hough Fluxo dos dados no método de agrupamento θ-ρ Classfcação dos pontos envolvdos no processo de conexão Estrutura de dados utlzada para armazenar os atrbutos dos segmentos Vznhanças a serem verfcadas no processo de conexão Detalhe das vznhanças a serem nvestgadas no processo de conexão de segmentos colneares. 37 Crtéro adotado para realzar conexão dos segmentos colneares Geometra utlzada para defnr as dstâncas d e d Localzação de alguns pontos pontes no processo de conexão de segmentos Quantzação utlzada no processo de detecção de bordas, e demas etapas do processo de vetorzação, e as parametrzações mas convenentes usadas em cada regão. 4 Lnha reta obtda com o Método dos Mínmos Quadrados Problema apresentado pelo Detetor de Bordas (Nevata e Babu) nos cantos das feções. 43 Reta obtda com o método dos mínmos quadrados e reta obtda utlzando a condção da medana mínma quadrada. 44 Algortmo para a regressão utlzando a medana mínma quadrada Segmento orgnal, dos segmentos obtdos após quebra no ponto de d 2, três segmentos obtdos após quebra no ponto de d 3, três segmentos lneares obtdos. 46 Menu de operações do sstema desenvolvdo e detalhe do fluxo de
12 x processamento das magens. 47 Imagem orgnal sobreposta pelos vetores obtdos no processamento (lnha tracejada). 48 Etapas a serem verfcadas no processo de detecção de feções lneares Imagem orgnal, resultado com a aplcação do fltro da méda 3x3, Fltro da méda 5x5, Fltro da medana e Fltro da medana com varânca mínma por regão. 50 Imagem orgnal, resultado com a aplcação do operador de Prewtt 3x3, Operador de Sobel 3x3, Operador de Sobel 5x5, e Operador de Nevata e Babu. 5 Imagem orgnal, com muto ruído, resultado da detecção utlzando o Operador de Sobel e Operador de Nevata e Babu 52 Método mplementado para a construção de máscaras de Nevata e Babu Geometra utlzada no método Determnação da posção dos elementos acma e abaxo da reta Máscaras geradas pelo método proposto Máscaras geradas pelo software desenvolvdo Imagem orgnal de bordas, resultado obtdo com o método de Otsu, Método de Pun e Método do Trângulo. 58 Formação das regões a serem utlzados no processo de lmarzação local (Otsu modfcado). 59 Imagens orgnas, resultados obtdos com a aplcação do Método de Otsu e Resultados obtdos com o Método de Otsu modfcado (proposto). 60 Determnação dos pontos a serem verfcados no processo de afnamento Resultados obtdos com a aplcação da supressão não máxma e supressão não máxma generalzada (proposta). 62 Os números representam rótulos obtdos, e nota-se que o segmento de rótulos 4 cruza o segmento de rótulos. 63 Esquema utlzado para evtar problemas na defnção dos pxels extremos da lnha durante o Método de Varredura e rotulação ou Inundação (proposto). 64 Dreção dos pxels de uma dada reta e resultado da conexão utlzando o método da varredura e rotulação (rótulos dferentes para pontos com uma mesma dreção). 65 Detalhe do problema que ocorre no método apresentado (Varredura e Rotulação). 66 Sugestão para a correção do problema no método Scan & Label Localzação dos pontos extremos antes e depos da correção
13 x 68 Detalhe de um segmento onde os extremos precsam ser verfcados, para se defnr os pontos extremos da reta 69 Regões utlzadas na rotna de conexão de segmentos colneares Relaconamento entre os segmentos na rotna de conexão de segmentos colneares. 7 Máscara para a conexão de segmentos colneares Város segmentos colneares não conectados e após a utlzação da máscara da fgura Imagem de dreções obtda pela etapa de detecção de bordas, (b) magem de dreções após a correção sugerda, (c) detalhe do segmento destacado em (a) e (d) detalhe do segmento destacado em (b). 74 Ajustamento de retas sobre dos Segmentos ( e 4) Confguração dos segmentos e 4, e a dentfcação dos pontos de quebra no processo de ajustamento. 76 Confguração dos segmentos após a quebra do segmento de rótulo 4 em dos segmentos (rótulos 4 e 9). 77 Algortmo utlzado para fazer a troca de rótulos no processo de quebra de segmentos. 78 Algortmo utlzado para medr a qualdade do ajustamento e decdr as stuações onde a quebra (splttng) é necessára. 79 Imagem gerada sntetcamente Modelo de degradação utlzado para a obtenção da magem padrão Imagem utlzada na parte expermental deste trabalho, obtda pelo processo de degradação. 82 Expermento Expermento Expermento Expermento Expermento Expermento Expermento Expermento Expermento Expermento Expermento (magem aérea)
14 x 93 Expermento 2 (magem aérea) Expermento 3 (magem aérea) Expermento 4 (magem aérea) Expermento 5 (magem aérea) Expermento 6 (magem aérea) Expermento 7 (magem aérea) Expermento 8 (magem aérea) Expermento 9 (magem aérea) Expermento 0 (magem aérea) Repetção do expermento 8 (magem aérea), com o Método de Otsu Modfcado (Local) na etapa de lmarzação. 03 Repetção do expermento 0 (magem aérea), com o Método de Otsu Modfcado (Local) na etapa de lmarzação
15 xv LISTA DE TABELAS Págna Operadores detectores de gradente com respostas máxmas em bordas na horzontal e vertcal. 8 2 Coordenadas e parâmetros dos segmentos que formam os três polígonos da 89 magem padrão. 3 Tabela de erros obtdos nos resultados dos expermentos. 96
16 xv ARTERO, A. O. Técncas para a extração automátca de feções retas em magens dgtas. Presdente Prudente, p. Dssertação de Mestrado Faculdade de Cêncas e Tecnologa, Campus de Presdente Prudente, Unversdade Estadual Paulsta. RESUMO Este trabalho apresenta um estudo e a mplementação de algumas técncas utlzadas para a extração de feções retas em magens dgtas. Os resultados obtdos com a aplcação de algumas das técncas estudadas são avalados por meo de uma magem-padrão. Além da análse ndvdual dos resultados obtdos pelas técncas utlzadas em cada etapa, foram avalados também os resultados obtdos com dferentes combnações das técncas nas dversas etapas do processo. O mesmo processamento fo também aplcado a um detalhe de uma magem aérea. O sstema desenvolvdo fo mplementado na lnguagem de programação C++, sendo utlzado o ambente de programação C++ Bulder. Palavras-chaves: Detecção Automátca de Lnhas Retas; Extração de Feções; Segmentação; Processamento Dgtal de Imagens; Fotogrametra Dgtal.
17 xv ABSTRACT Ths work presents a study and the mplementaton of some technques used for the extracton of straght features n dgtal mages. The results obtaned wth the applcaton of some of the studed technques are assessed by means of an standard mage. Besdes the ndvdual analyss of the results obtaned by the technques used n each stage, the results obtaned wth dfferent combnatons of the technques n the several stages of the process were also apprased. The same processng was also appled to a detal of an aeral mage. The developed system was mplemented n the programmng language C++, beng used the programmng envronment C++ Bulder. Keywords: Automatc Detecton of Straght Lnes; Features Extracton; Segmentaton; Dgtal Image Processng; Dgtal Photogrammetry.
18 CAPITULO INTRODUÇÃO. CONSIDERAÇÕES INICIAIS Acredta-se que um terço do processamento cerebral seja utlzado no processo vsual, e a forma pela qual as pessoas analsam as cenas e conseguem dentfcar objetos presentes nelas, mesmo quando tas objetos se apresentam parcalmente obstruídos, ou anda com algumas dferenças de escala (devdo a um afastamento do observador), rotação ou translação, não é um processo de fácl compreensão. A dsponbldade de hardware (computadores para o processamento e também dos meos para a captura das magens - câmaras dgtas) não tem sdo sufcente para resolver o problema, cuja solução, com certeza está na forma como o processamento precsa ser realzado. Uma sére de aplcações, que atualmente precsam ser executadas por pessoas, contnuam anda sem uma solução automatzada, devdo à mpossbldade de uma análse confável das magens obtdas. Entre as dversas áreas que buscam esta solução estão: Cartografa Embora grande parte dos processos desta área tenham sdo automatzados (câmaras dgtas capturando magens e envando-as dretamente a sstemas computaconas, com apoo smultâneo de sstemas de posconamento global GPS, e outros dspostvos), a dentfcação dos objetos presentes nas magens, contnua anda
19 2 sendo uma tarefa dfícl de ser totalmente resolvda computaconalmente. Apesar do grande avanço tecnológco do hardware, uma grande quantdade de nformações, presente nas magens, contnua anda dependendo de um operador humano para serem extraídas, e verfca-se, nesta etapa, o grande gargalo do processo. Mltar Nesta área também se busca uma automação para o processo de localzação de alvos. Devdo aos grandes nvestmentos em pesqusas, dreconados à esta área, é possível afrmar que mutos avanços mportantes em análse de magens se devem a esta área. Medcna A obtenção de um processo automátco que auxle o dagnóstco baseado em magens de órgãos do corpo humano é de grande mportânca, e novamente as barreras exstentes estão na forma de análse das magens, que são obtdas pelos meos mas comuns nesta área tas como a tomografa computadorzada, ressonânca magnétca e também pelo anda extremamente utlzado processo de radografa baseado em Raos-X. Vsão Computaconal Esta área tem como objetvo a obtenção de máqunas dotadas do sentdo de vsão (sto nclu a compreensão das magens obtdas), e neste caso, as demas áreas ctadas anterormente, e mutas tantas outras, se tornam medatamente apenas aplcações específcas desta área. A análse de magens contnua sendo uma tarefa dfícl de ser mplementada em computadores, e o que há de fato dsponível até o momento é um conjunto de técncas de processamento de magens, que podem ser utlzadas para retrar algumas nformações sobre os objetos presentes na cena. Algumas das feções mas mportantes são as lnhas retas, bordas e pontos solados. Devdo à dfculdade de se encontrar lnhas retas soladas em magens dgtas, uma melhor alternatva é a utlzação das bordas dos objetos (lnhas retas formadas pelas bordas da magem). Alguns dos motvos que justfcam a preferênca pela utlzação das lnhas retas (Tommasell e Tozz, 993) são: apresentam-se em grande abundânca em ambentes modfcados pelo homem (formato de peças em lnhas de montagens, construções predas a serem dentfcadas em magens aéreas etc.);
20 3 facldade de detecção em magens dgtas; smplcdade no processo posteror de vetorzação; e menor probabldade de erros grosseros no estabelecmento de suas homólogas no espaço objeto (em relação aos pontos de apoo). É possível anda afrmar que as bordas presentes em uma magem são mportantes porque defnem os lmtes dos objetos, e consequentemente, o cálculo do perímetro e área dos objetos analsados. Estas grandezas são mportantes porque permtem uma prmera ndcação da forma do objeto (Parker, 996), (Castleman, 996) de forma a determnar o seu grau de pertnênca em relação a um conjunto de objetos conhecdos (quadrados, círculos etc.). Na área de mapeamento especfcamente, as lnhas retas exstentes nas magens oferecem nformações mportantes aos processos de orentação das magens, e também auxlam durante a etapa de regstro de magens (Tommasell e Tozz,996). Não somente a escolha das técncas mas adequadas a cada tpo de aplcação, mas também a forma como tas técncas podem trabalhar em conjunto são objeto de estudo neste trabalho..2 ESTRUTURA DO TRABALHO O capítulo 2 deste trabalho apresenta uma revsão de algumas técncas utlzadas no processo de extração de feções retas em magens dgtas. Como os processos tradconas para a execução desta tarefa seguem normalmente uma seqüênca (Pane e Lodwck, 988), composta por cnco etapas: Suavzação (Smoothng), Detecção de Bordas (Edge Detecton), Lmarzação (Thresholdng), Afnamento de bordas (Thnnng) e Conexão (Lnkng), a apresentação das técncas neste capítulo segue a mesma seqüênca. No capítulo 3 são descrtos os detalhes do sstema desenvolvdo, bem como as correções e melhoras que foram fetas nas técncas utlzadas. No capítulo 4 são apresentados os resultados que foram obtdos com a utlzação das técncas mplementadas, quando aplcadas sobre uma magem padrão (smulada) e também sobre o detalhe de uma magem aérea.
21 4 Fnalmente, no capítulo 5 são apresentadas algumas conclusões que foram obtdas com a realzação deste trabalho, além de algumas recomendações para trabalhos futuros.
22 5 CAPITULO 2 ETAPAS DO PROCESSO DE EXTRAÇÃO DE FEIÇÕES 2. CONSIDERAÇÕES INICIAIS A prmera etapa de um processo de extração de nformações em uma magem é conhecda por segmentação, e consste no processo de separar os objetos presentes na magem. Dependendo da aplcação, uma operação smples como a lmarzação (thresholdng) pode ser utlzada para segmentar uma magem em tons de cnza e, desta forma, separar os objetos presentes, do fundo da magem. Uma outra possbldade para a segmentação é a que faz uso da determnação das bordas dos objetos presentes na cena, e como tas regões são caracterzadas por uma varação brusca na magem, a utlzação de detectores de descontnudades são as ferramentas mas utlzadas. As descontnudades báscas em magens são os pontos, as lnhas e as bordas, porém, em processos fotogramétrcos e também em mutos outros, as de maor mportânca são as lnhas retas (defndas pelas bordas dos objetos). Os processos tradconas para a execução da tarefa de conversão de magens dgtas em vetores seguem normalmente uma seqüênca tal qual apresentam Pane e Lodwck(988), que sugerem as cnco seguntes etapas: Suavzação (Smoothng) Incalmente deve ser executada uma suavzação da magem, com o objetvo de reduzr algumas varações exageradas, que produzem
23 6 bordas falsas na magem (nesta etapa a utlzação de fltros capazes de suavzar a magem, porém preservando as bordas verdaderas precsa ser nvestgada). Fltros comuns do tpo passa-baxa são de fácl mplementação, porém, não atendem à necessdade de preservação de bordas, e alguma varação se torna necessára; 2 Detecção de Bordas (Edge Detecton) Consste na aplcação de um detector de bordas, que, normalmente, é baseado na aplcação de operações de detecção de varações de brlho na magem (normalmente uma dferencação na regão é a solução adotada). O operador de Sobel (Gonzalez, 993), (Pratt, 99), (Ekestron, 983), (Tommasell e Tozz, 993) e também o operador de Nevata e Babu (Pratt, 99) merecem bastante atenção nesta etapa; 3 Lmarzação (Thresholdng) Esta operação é normalmente utlzada para elmnar algumas bordas detectadas, mas que, por apresentarem uma baxa magntude, devem ser desconsderadas, a fm de smplfcar o processamento posteror; 4 Afnamento de bordas (Thnnng) Etapa em que as bordas com uma espessura de mas de um pxel precsam ser afnadas, para uma melhor defnção de sua verdadera localzação. O resultado deve ser uma borda com a largura de um pxel. 5 Conexão (Lnkng) Esta etapa deve ser capaz de defnr quas os pxels de borda devem ser agrupados, de forma a comporem cada uma das lnhas de bordas obtdas. Este conjunto de etapas é também denomnado como um processo únco de vetorzação. Neste trabalho, em algumas stuações é utlzada esta denomnação. A grande quantdade de métodos desenvolvdos em cada uma das fases do processo mpossblta um estudo completo sobre todos eles, e uma verfcação dos resultados que podem ser obtdos com a aplcação de alguns métodos dferentes em cada uma das etapas apresentadas anterormente se mostra mas vável. Outra questão que precsa ser nvestgada é a defnção da própra seqüênca apresentada anterormente, que pode ser modfcada, no sentdo de melhorar os resultados obtdos (por exemplo a aplcação da etapa de lmarzação antes da etapa de detecção de bordas). Outra consderação que merece atenção é a forma como certos detectores agrupam algumas destas etapas do processo, em uma únca, tal como ocorre com o Operador de Canny (Parker, 996), que consdera as etapas de suavzação, detecção e afnamento, como uma únca etapa (detecção).
24 7 Os resultados obtdos em cada uma das etapas precsam ser avalados por meo da utlzação de magens padrão, onde são conhecdos os verdaderos valores das ncógntas (coordenadas dos pxels de borda, ou anda os valores dos elementos que defnem as lnhas de borda de acordo com a parametrzação adotada) no processamento dos algortmos. Algumas destas formas de avalação são sugerdas em Pratt (99) e Parker (996), e normalmente são baseadas em uma análse estatístca da qualdade dos resultados obtdos (em relação à magens-padrão). 2.. Imagens analógcas e magens dgtas Uma magem analógca pode ser defnda como uma função bdmensonal f, que assoca para cada x,y, uma nformação de cor c. ƒ : R 2 R () x,y c As magens analógcas não podem ser manpuladas por um computador, e desta forma, um modelo adequado é a representação por meo de uma matrz bdmensonal, onde cada elemento representa uma pequena área da magem (pxel pcture element), consttundo-se em uma dscretzação da magem sobre uma grade regular (matrz quadrada ou retangular) Vznhança em magens dgtas Um mportante conceto em magens dgtas é o de vznhança de um pxel. Assm, um pxel p com coordenadas (x,y) possu quatro vznhos, localzados nas coordenadas (x-,y), (x+,y), (x,y-) e (x,y+). A este conjunto de pxels é dado o nome de vznhança-4 do pxel p. Da forma semelhante é defnda a vznhança-8 de um pxel p, dada pelo conjunto dos pxels que estão na vznhança-4, além dos pxels localzados nas coordenadas (x-,y-), (x-,y+), (x+,y-) e (x+,y+). Neste trabalho é também
25 8 utlzada em váras rotnas uma vznhança-24, defnda pelos mesmos crtéros que a vznhança-4 e vznhança-8, como mostra a fgura (c). (a) (b) (c) v v v v v v v v v v v v v v v p v v p v v v p v v v v v v v v v v v v v v v v Fgura (a) Vznhança-4, (b) Vznhança-8 e (c) Vznhança Operações pontuas e a convolução de magens Quando o processamento ocorre ndvdualmente sobre os pxels da magem, tem-se as chamadas operações pontuas. Algumas das operações pontuas mas utlzadas são a obtenção de magens negatvas (nvertdas), manpulação de contraste, subtração de magens, etc. Uma outra mportante forma de processar uma magem é conhecda como convolução entre uma magem e uma máscara h, representada por h* é dada por: n m h * ( x, y) = h( a, b). ( x + - a, y -+ b) (2) a= 0 b= 0 com x,y : dmensões da magem ; m,n : dmensões do fltro h; Na prátca, uma pequena janela (magem fltro) é deslocada sobre a magem orgnal, e o valor do pxel da magem é obtdo pela soma do produto dos elementos da janela, pelos elementos correspondentes na magem. Em seguda a janela é deslocada, e a operação se repete. A fgura 2 mostra o processo de convolução de um fltro h e uma magem, resultando na magem k.
26 9, 2, 3, 4, 5, 6, 7,... m, h, h 2, h 3, k, k 2, k 3, k 4, k 5, k 6, k 7,... k m,,2 2,2 3,2 4,2 5,2 6,2 7,2... m,2 h,2 h 2,2 h 3,2 k,2 k 2,2 k 3,2 k 4,2 k 5,2 k 6,2 k 7,2... k m,2,3 2,3 3,3 4,3 5,3 6,3 7,3... m,3 h,3 h 2,3 h 3,3 k,3 k 2,3 k 3,3 k 4,3 k 5,3 k 6,3 k 7,3... k m,3,4 2,4 3,4 4,4 5,4 6,4 7,4... m,4 Fltro h k,4 k 2,4 k 3,4 k 4,4 k 5,4 k 6,4 k 7,4... k m, ,n 2,n 3,n 4,n 5,n 6,n 7,n... m,n k,n k 2,n k 3,n k 4,n k 5,n k 6,n k 7,n... k m,n Imagem Imagem k Fgura 2 - Operação de convolução sobre magens dgtas. 2.2 ETAPA DE SUAVIZAÇÃO Conforme apresentado anterormente, a prmera etapa em um processo de vetorzação consste em uma suavzação da magem, que tem por objetvo elmnar o ruído na magem e também o excesso de detalhes, que não são mportantes (devem ser preservados apenas as feções mas sgnfcatvas). Cabe, anda, a consderação de que os fltros de suavzação provocam um borramento da magem, e assm, dmnuem as defnções de bordas da magem. Quando se tem por objetvo fazer a vetorzação da magem, a preservação da localzação das bordas é fundamental; portanto, é desejável, nesta etapa, a utlzação de fltros de suavzação que apresentem uma máxma preservação das bordas. A presença de ruídos e bordas em certas regões da magem caracterza estas regões como áreas de altas-freqüêncas. Por este motvo os fltros projetados para a redução de ruídos são também conhecdos por fltros passa-baxa, por serem projetados de forma a atenuar as altas-freqüêncas, não modfcando as baxas freqüêncas (áreas homogêneas da magem) Fltro passa-baxa Um fltro passa-baxa no domíno do espaço pressupõe a aplcação de uma máscara como a que aparece na fgura 3. Este tpo de fltro é normalmente utlzado para suavzar magens, prncpalmente para elmnar (atenuar) ruídos.
27 (a) (b) Fgura 3 Exemplos de fltros passa baxa no domíno do espaço. É fácl observar que a aplcação das máscaras da fgura 3 eqüvalem à execução de uma operação de cálculo da méda dos elementos em cada pxel da magem, no caso da fgura 3, (a) e (b) em uma vznhança 4 e 8 respectvamente. A fgura 4 mostra o resultado obtdo com a aplcação de um fltro passa-baxa 3x sobre uma lnha de magem Tamanho da máscara Imagem orgnal Imagem fltrada Fgura 4 Aplcação de um Fltro da méda 3x sobre uma lnha da magem. O fltro da méda produz uma boa suavzação na magem, porém, apesar de ser ótmo para a remoção de ruídos, tem a desvantagem de atenuar muto a nformação de borda Fltro da medana Este fltro tem como grande vantagem o fato de permtr uma boa remoção dos ruídos, não alterando muto as nformações de borda. A medana de uma seqüênca é dada pelo elemento que dvde os valores da seqüênca em duas partes guas (a seqüênca precsa estar ordenada). A fgura 5 mostra um exemplo de aplcação deste
28 fltro sobre uma lnha da magem. O fltro da medana não pode ser obtdo por meo de uma máscara de convolução. Tamanho da máscara Imagem orgnal Imagem fltrada Fgura 5 Aplcação de um Fltro da medana 3x sobre uma lnha da magem. A fgura 6 mostra grafcamente a dferença entre os resultados obtdos com a aplcação dos fltros da méda e medana. Em (a) e (b) verfca-se os resultados obtdos com a aplcação destes fltros em uma regão de borda. (a) (b) (c) (d) medana méda medana medana Imagem Orgnal Janela = 3 Janela = 5 Fgura 6 Comparação de resultados obtdos com os fltros da méda e medana usando janelas de tamanho 3 e 5. No caso do fltro da méda, percebe-se uma grande modfcação na regão de borda (suavzação), enquanto que com o fltro da medana sto não ocorre. Em (c) temse a aplcação do fltro da medana com tamanho 3 e 5 e observa-se a remoção de um
 a magem orgnal possu dos pxels muto dferentes dos demas, porém guas entre s; neste caso, enquanto que a utlzação de uma janela de tamanho 3 age como na presença de uma borda, um fltro com")
29 2 pxel muto dferente de seus vznhos (ruído). Em (d) a magem orgnal possu dos pxels muto dferentes dos demas, porém guas entre s; neste caso, enquanto que a utlzação de uma janela de tamanho 3 age como na presença de uma borda, um fltro com tamanho 5 elmna estes pxels, caracterzando-os como ruído Fltro da medana com análse de varânca Este fltro (Newton, 993) sugere que o valor a ser atrbuído ao pxel seja dado pela medana dos valores da vznhança que apresentar a menor varânca. Na fgura 7, em (a) são construídas quatro regões (Nordeste, Sudeste, Sudoeste e Noroeste sete pxels cada), em (b) são construídas quatro regões (Norte, Leste, Sul e Oeste sete pxels cada) e em (c) é construída apenas a regão central (nove pxels). Ao pxel central é atrbuído o valor da medana da regão de menor varânca. (4 regões-no,nd,sd,so) (4 regões L,S,O,N) ( regão - CENTRAL) Fgura 7 Fltro da medana com a análse da varânca. e cantos. Este fltro também é chamado de fltro de suavzação com preservação de bordas ETAPA DE DETECÇÃO DE FEIÇÕES Na análse de magens, algumas das feções mas mportantes são pxels solados, lnhas retas e as bordas. Enquanto que no domíno da freqüênca, estas feções são caracterzadas pela presença de altas freqüêncas, no domíno do espaço, tas feções são representadas por varações bruscas no brlho dos pxels da magem. No domíno
30 3 espacal, a técnca mas comum para a detecção de feções é baseada na aplcação de operadores locas (máscaras de convolução) de dferenças em cada pxel da magem. Tas operadores apresentam uma resposta (magntude) mas elevada nas bordas da magem. Além da preocupação com a localzação dos pxels de borda, exste também a necessdade de se conhecer a nclnação da borda nestes pxels, o que também pode ser obtdo pelos mesmos operadores Detecção de pxels solados O elemento mas smples que pode ocorrer em uma magem é o pxel solado, que pode ser detectado com a aplcação de uma máscara de convolução tal qual a que aparece na fgura Fgura 8 Máscara utlzada para detectar pxels solados DETECÇÃO DE LINHAS ISOLADAS As lnhas que aparecem em uma magem oferecem grandes possbldades de dentfcação dos objetos nela presentes. A fgura 9 mostra um conjunto de máscaras que pode ser utlzado para detectar lnhas soladas em magens dgtas (a) ( b) (c) (d) Fgura 9 Máscaras que podem ser utlzadas para detectar lnhas soladas nas dreções (a) 0 o, (b) 45 o, (c) 90 o e (d) 45 o (Gonzalez, 993).
31 4 Operadores de detecção de lnhas ou pxels solados não apresentam mutas aplcações, pos, não é comum a ocorrênca destes elementos em magens dgtas. Uma melhor alternatva para a extração de feções é a utlzação das bordas presentes nas magens Bordas em magens As bordas dos elementos presentes em uma magem são fundamentas no processo de análse de magens. Isto ocorre porque as bordas defnem o contorno dos objetos presentes na magem (Gonzalez, 993). A maora dos processos de detecção de descontnudades basea-se no fato de que tas descontnudades são, na verdade, uma modfcação do nível de cnza no pxel em estudo em relação a seus vznhos, e assm, tal modfcação pode ser determnada pela dervada do snal no pxel. A fgura 0 mostra uma descontnudade em uma magem, e o gráfco assocado a estas descontnudades. Também é apresentado o gráfco da prmera dervada no local, que apresenta um máxmo ou mínmo neste local. O gráfco da segunda dervada também é apresentado, e neste caso verfca-se uma característca anda mas nteressante para a detecção da descontnudades. Como se observa, a segunda dervada apresenta uma passagem por zero (zero-crossng) exatamente na localzação da descontnudade. A segunda dervada é conhecda também como Laplacano (Gonzalez, 993). (a) (b) (c) (d) Fgura 0 (a) Imagem com descontnudade, (b) Snal da descontnudade, (c) prmera dervada do snal e (d) segunda dervada do snal (Gonzalez, 993).
32 5 Na prátca uma máscara de convolução pode ser construída de forma a se obter uma aproxmação da dervada (utlzando dferenças). Este é o caso dos operadores de Sobel e Prewtt, que serão descrtos a segur Operador de Prewtt Um operador bastante utlzado na detecção de bordas é o detector de Prewtt, que apresenta as máscaras de convolução que aparecem na fgura, defnndo os gradentes em x e y, respectvamente como Gx e Gy Gx Gy Fgura Máscaras utlzadas no detector de Prewtt Operador de Sobel Consderando que os pxels mas próxmos do centro devem apresentar uma maor nfluênca sobre o mesmo, o operador de Sobel é defndo com valores maores na regão central, e então as máscaras são as que aparecem na fgura 2 (Gonzalez, 993) Gx Gy Fgura 2 Máscaras utlzadas no detector de Sobel. As aplcações dos dos operadores Gx e Gy resultam nos gradentes da borda na dreção x e em y, respectvamente e, por meo destes, é possível a obtenção da magntude e da dreção (ângulo) da borda em cada pxel.
33 6 Magntude α Gx Fgura 3 Determnação da Magntude dos gradentes e também do ângulo. A magntude e a dreção da bordas são dadas por (3) e (4). 2 2 Magntude Gx,Gy = Gx + Gy (3) α = arctan Gy Gx (4) É mportante notar que, pela forma como as máscaras são construídas (baseadas no operador dferencal), as mesmas apresentam uma resposta nula em regões homogêneas (onde a dervada é nula). Magntudes de pequeno valor ndcam que o pxel em estudo não pertence a uma borda bem defnda (área mas homogênea) Operadores de Nevata e Babu Este operador faz a detecção das bordas através da aplcação de um conjunto de máscaras construídas de tal forma a apresentarem uma maor resposta para lnhas com determnados ângulos de nclnação. A fgura 4 mostra um conjunto de 2 máscaras (Pratt, 99) que são utlzadas para a detecção de lnhas com 0, 30, 60, 90, 20, 50, 80, 20, 240, 270, 300 e 330 graus. Observa - se que as máscaras utlzadas para detectar bordas com dreção α e (α + π ) são smlares, sendo a únca dferença defnda pela troca dos snas.
34 7 Esta observação permte uma melhora na aplcação do algortmo que sugere a aplcação das 2 máscaras. Com a utlzação de apenas 6 máscaras, e a verfcação do snal para a determnação do ângulo (neste caso a maor magntude deve ser defnda por meo do valor absoluto) graus 80 graus graus 20 graus graus 240 graus graus 270 graus graus 300 graus graus 330 graus Fgura 4 Máscaras utlzadas pelo operador de Nevata e Babu Comparação da efcênca de operadores Além dos operadores mostrados anterormente, város outros têm sdo defndos e apresentados na lteratura. A tabela mostra um conjunto dos operadores mas utlzados na detecção de bordas (Pratt, 99).
35 8 Tabela Operadores detectores de gradente com respostas máxmas em bordas na horzontal e vertcal (Pratt, 99). OPERADOR GRADIENTE HORIZONTAL GRADIENTE VERTICAL DIFERENÇA DE PONTO DIFERENÇA DE PONTO 0 SEPARADA ROBERTS PREWITT SOBEL FREI-CHEN Uma grande lmtação destes operadores é a nefcênca que apresentam quando são aplcados em áreas com um alto nível de ruído. Na prátca, além da suavzação da magem, este problema pode ser resolvdo com um aumento do tamanho da máscara utlzada no processo (Artero e Tommasell, 999), o que mplca na consderação de uma maor vznhança do pxel. Por outro lado, o aumento exagerado dmnu a sensbldade do detector, quanto à pequenas varações de dreção das bordas e, desta forma, é precso utlzar um tamanho de máscara mas adequado aos dversos casos (uma possbldade nteressante sera a modfcação dos tamanhos de acordo com o nível de ruído presente na regão, consttundo-se assm uma espéce de detector adaptatvo). Quando da avalação da qualdade de um detector de bordas, procura se comparar os resultados obtdos pelo operador, quando o mesmo é aplcado sobre uma magem em que se conhece as verdaderas localzações dos pxels da borda. Uma
36 9 abordagem baseada nesta déa é apresentada em Parker (996), que defne a segunte função: E = I A + α d ( ) = max( I, I ) A I 2 (5) onde I A : número de pxels detectados como pertencentes a borda; I I : número de pxels na magem teste; d( ) : dstânca entre os pxels detectados e verdaderos; α : fator de escala, e pode ser mantdo constante em um conjunto de testes. 2.4 LIMIARIZAÇÃO (THRESHOLDING) Um método efcente de lmarzação deve ser capaz de fornecer automatcamente um valor (lmar), para o qual todos os pxels com valor de brlho nferor a este lmar devam ser elmnados (magntude gual a zero, e sem dreção). Neste trabalho a etapa de lmarzação é utlzada para elmnar as bordas nsgnfcantes da magem, após o processo de detecção de bordas. De uma manera geral, é possível afrmar que as bordas menos mportantes (e que devem ser elmnadas) são aquelas que possuem uma magntude muto pequena. Exste um conjunto muto grande de técncas para a obtenção de um valor lmar, e observa-se que cada uma delas utlza algum crtéro que consdera mportante para obter o valor do melhor valor lmar (Sahoo, 988). A segur são descrtos alguns métodos utlzados para a obtenção deste lmar procurado P-Tle O método mas smples para a obtenção do lmar é conhecdo por Método p-tle (Sahoo, 988), sendo baseado na condção de que se conhece a área de ocupação do objeto na magem. Por este método, sabendo-se que o objeto ocupa p% da magem,


.")


37 20 então o lmar é defndo pelo valor que resulta em p% da magem acma deste valor (supõe-se que o objeto possu valores altos enquanto que o fundo possu valores baxos). Este método é adequado apenas para stuações restrtas, quando o objeto a ser solado possu cor dstnta do fundo da magem, ou seja, possu um hstograma bmodal, como o que aparece na fgura 5(b). (a) objeto T fundo (b) (c) Fgura 5 (a) Imagem orgnal, (b) Hstograma obtdo e (c) Imagem obtda após aplcação do lmar T. A fgura 5 mostra uma stuação em que o método pode ser empregado com sucesso, enquanto que a fgura 6 mostra uma outra stuação em que não exste uma boa defnção de objeto e fundo (o hstograma não é bmodal). (c) (a) (d) 2 (b) Fgura 6 (a) Imagem orgnal, (b) Hstograma, (c) Imagem obtda com a aplcação do lmar e (d) Imagem obtda com a aplcação do lmar 2.
. (b) Fgura 7 (a) Imagem de bordas e (b) Hstograma da magem.")
38 2 Neste trabalho, a etapa de lmarzação deverá ser aplcada após o processo de detecção de bordas, e assm, dferente do que se apresenta nas fguras 5 e 6, exste uma certa defnção na tonaldade dos elementos presentes na magem, ou seja, as bordas sempre aparecem em tons claros sobre um fundo escuro (fgura 7). (b) Fgura 7 (a) Imagem de bordas e (b) Hstograma da magem. (a) Outro fato que precsa ser consderado, é que neste trabalho a etapa de lmarzação deve elmnar todos os pxels que possuam a magntude menor que o valor de lmar. Por outro lado, os pxels que possuem uma magntude maor não devem ter suas magntudes alteradas de forma alguma. Apesar de exstr o conhecmento do comportamento dos tons de cnza na magem, anda assm não exste um valor óbvo para o lmar, pos o hstograma não é bmodal, como aquele que aparece na fgura 5(b), porém, apresenta um comportamento bem mas prevsível que aquele da fgura 6 (b) Método de Otsu Este método é baseado na análse dscrmnante (Sahoo, 988), e o valor do lmar é obtdo supondo que os pxels da magem podem ser classfcados em duas classes (C 0 e C ) que são o objeto e o fundo. Tomando σ 2 B e σ 2 T as varâncas entre as classes e total respectvamente. A varânca entre as classes (Parker, 996), (Sahoo, 988) é dada por :
39 22 onde: 2 2 σ = ω ω ( µ µ ) (6) B 0 0 t ω 0 = = 0 p (7) ω = ω (8) 0 com e µ 0 µ = t (9) ω 0 t µ t =. p = 0 p (0) n = () n enquanto que a varânca total entre as classes(parker, 996), (Sahoo, 988) é dada por: onde: l 2 2 σ T = ( µ T ). p (2) = 0 l =. p µ T = 0 (3) e n é a freqüênca que o valor ocorre na magem e n o valor total de pxels na magem. O valor ótmo para o lmar, segundo este método, é dado pelo valor de t, tal que n seja mínmo em (4). 2 B n = σ σ (4) 2 T Método de Pun Este método é baseado na teora da nformação, que se basea na premssa de que a geração de nformação pode ser modelada como um processo probablístco
40 23 (Gonzalez, 993). Por esta teora defne-se a entropa (quantdade de códgo necessára para representar um símbolo) de cada pxel da magem por: Entropa(x) = x. log(x) (5) Pelo método, para cada possível valor de lmar são defndas duas entropas à posteror (do objeto e do fundo da magem), dadas por: t H = p log p b e = 0 (6) l Hw = p loge p = t + (7) e o valor do lmar ótmo é dado por T = Arg máxmo { H b (t) + H w (t) } (8) Método de Kapur, Sahoo e Wong Como se trata de um outro método baseado na teora da nformação, este método também faz uso da entropa, porém, defnndo H b e H w conforme (9) e (20) H b = t = 0 p log p t e p p t (9) H w l p p = log e (20) p p = t + t t e o valor do lmar ótmo é dado por T = Arg máxmo { H b (t) + H w (t) } (2)
41 Método de Johannsen e Blle é dado por : Um outro método baseado na teora da nformação, neste caso, o valor do lmar T = Arg máxmo { S (t) + S 2 (t) } (22) Onde S t t t = e p t pt e pt + log p e p 0 log 0 log = 0 (23) p = = = 0 S 2 l l l = e p l pt e pt + log p e p t log = t log t (24) p = + = + = t Método do Trângulo Este método sugere o traçado de uma lnha entre os valores de máxmo e mínmo no hstograma da magem, e utlza como lmar o valor de brlho que apresenta a maor valor de d (dstânca entre a reta e os valores de freqüênca(brlho) não nulos). d Fgura 8 Crtéro utlzado para a determnação do valor de lmar, pelo Método do Trângulo.
42 25 A forma obtda nos hstogramas de magens de bordas se mostram muto atraentes para a aplcação deste método de lmarzação Efcênca dos métodos globas De manera geral (não se tratando especfcamente de magens de bordas), os resultados obtdos com o uso de cada um dos métodos descrtos não apontam para um método mas adequado que outro (Sahoo, 988), e o que se observa na prátca é que os resultados obtdos varam de acordo com a magem processada. Observa-se anda que, devdo a problemas de reflectânca, sombras e falta de lumnação regular nas magens, um valor de lmar global geralmente não apresenta bons resultados (Hussan, 99). No caso do processamento de magens aéreas estes problemas também precsam ser levados em consderação. 2.5 ETAPA DE AFINAMENTO DE BORDAS (THINNING) Quando na obtenção da borda, normalmente não se obtém uma lnha únca defnndo a mesma, e sm um conjunto de pxels. A etapa segunte no processo deve realzar um afnamento da lnha de borda. Exstem város métodos propostos com o objetvo de resolver este problema, sendo que alguns dos mas conhecdos fazem parte das operações morfológcas afnamento (Thnnng) e geração de esqueleto (Skeletonzaton); porém, tas operações são geralmente empregadas em magens bnáras, onde todos os pxels possuem apenas dos valores de brlho, que se resumem em cor de fundo e cor de frente (do objeto). Neste caso, o afnamento consste em uma elmnação gradual dos pxels da regão (pxels de uma borda), de tal modo que no fnal do processo sobram apenas os pxels centras da regão. Quando as lnhas a serem afnadas não são bnáras, ou seja, são compostas por pxels de brlho varado (dferenças de magntude), e anda se verfca que o valor do brlho é maor de acordo com a proxmdade do mesmo em relação a borda, tas métodos não são adequados. A fgura 9 mostra o snal de uma borda obtda por meo
43 26 de algum dos operadores descrtos anterormente, e também os resultados que podem ser obtdos por dferentes técncas de afnamento. (a) Snal de borda na magem ( α : dreção da borda ) (b) α α α Pontos detectados como borda (c) (d) α α Resultado obtdo por afnamento ou esqueletonzação Resultado desejado (na maor magntude) Fgura 9 (a) Snal de borda, (b) Detalhe da borda, (c) Afnamento por métodos de afnamento bnáro e (d) Consderando o pxel de maor magntude que melhor representa a localzação da borda Método da supressão não máxma Por este método a elmnação dos pxels é feta perpendcularmente à dreção da borda. Com o objetvo de smplfcar as rotnas de busca na vznhança podem ser utlzadas as regões apresentadas na fgura 20(a), (Zhou et al, 989) e (Venkateswar- Chellapa, 992) para cada dreção de pxel de borda, ou anda as dreções apresentadas na fgura 20(b) (Tommasell, 999). 0 7 (a) (b) Fgura 20 Dreções consderadas no método de afnamento por supressão não máxma (a) (Zhou Et al., 989) e (Venkateswar-Chellapa, 992), (b) (Tommasell, 999).
44 27 Vsualmente, esta dscretzação não apresenta problemas nos resultados obtdos, e o afnamento se desenvolve com uma comparação entre os pxels, de forma a manter apenas o de maor magntude. A fgura 2 mostra detalhes dos pxels pertencentes a duas bordas. Ponto a ser preservado (maor magntude) Ponto a ser removdo (menor magntude) Fgura 2 Processo de afnamento de bordas. Durante o processo, um pxel com dreção 90 o ou 270 o é comparado com seus dos vznhos horzontas (à dreta e à esquerda), enquanto que um pxel com dreção horzontal ( 0 o ou 80 o ) deverá ser comparado com seus dos vznhos vertcas (pxels acma e abaxo). No caso de bordas nclnadas, tal como aparece na fgura 2, os pxels devem ser comparados com seus vznhos na dagonal pela borda. Porém, neste caso o processo não é tão smples como nos dos casos anterores, pos os pxels a serem comparados precsam estar também à uma dstânca untára do pxel em análse. Como se trabalha sobre uma malha regular, não exstem pxels nestes locas, tornando-se necessára a realzação de uma reamostragem na regão, o que normalmente pode ser feto através de uma nterpolação blnear. A fgura 22 mostra esta stuação em que a borda possu uma dreção não horzontal ou vertcal a k x b k2 y x y2 c x 2 d Fgura 22 Detalhe da localzação dos pontos a serem nterpolados.
45 28 No caso da fgura 22, deseja-se conhecer a magntude no ponto x, sendo conhecdas apenas as magntudes nos pontos pertencentes à grade (a, b, c e d). Incalmente, as magntudes nos pontos x e x 2 são obtdas por duas nterpolações lneares, utlzando as equações paramétrcas dos segmentos de retas ab e cd, respectvamente dadas por: x = a + (b a).k (25) x 2 = c + (d c).k (26) e, fnalmente, a magntude no ponto x é obtda por uma tercera nterpolação lnear, desta vez utlzando a equação paramétrca da reta x x 2, dada por: x = x + (x 2 x ).k 2 (27) onde x é a magntude nterpolada procurada. Aplcando (25) e (26) em (27) tem-se: assm: x = a + (b a)k + [( c + (d c)k ) ( a + (b a).k ) ]k 2 (28) x = a + (b a)k + (c.a )k2) + (d.c.b +.a)k k 2 (29) e para o caso partcular em que k = k 2 pode ser obtda a segunte smplfcação x = a + (b 2a + c)k + (d c b + a)k 2 (30) Observamos anda que k é o coseno do ângulo enquanto que k 2 é o seno do mesmo (ambos em valor absoluto). A detecção de bordas utlzando os operadores de Sobel resulta em um conjunto contínuo de ângulos, e a dscretzação em apenas oto dreções (fgura 20) representa uma smplfcação muto drástca. A dscretzação em doze dreções (a cada 30 graus) apresentada em Tommasell (999), consttu-se em um melhor aprovetamento dos valores de dreção, quando na
46 29 etapa de detecção de bordas é utlzado o operador de Nevata e Babu (doze dreções dscretas entre 0 e 330 o ). Fnalmente, com o objetvo de se avalar possíves melhoras nos resultados desta etapa de afnamento de bordas, é anda mplementada neste trabalho uma modfcação no método, em que não é necessára a dscretzação das dreções de bordas, consstndo em um método de supressão não máxma generalzada (Artero e Tommasell, 999). 2.6 ETAPA DE CONEXÃO (LINKING) A etapa de conexão de pxels (lnkng) deve localzar todos os pxels pertencentes a uma borda e agrupá-los, de forma a consttuírem uma únca feção, dotada de seus atrbutos peculares, ou seja, no caso de uma lnha reta, um pxel ncal, um pxel fnal, uma dreção etc. O método mas conhecdo que pode ser utlzado nesta etapa é a Transformada de Hough, que permte a localzação de objetos (lnhas, círculos etc.) em magens dgtas. Apesar desta operação ser de fácl compreensão, o seu algortmo apresenta grandes restrções quanto a sua mplementação. Neste trabalho é apresentado anda um outro método, que apresenta como vantagem uma maor efcênca da estrutura utlzada A Transformada de Hough Uma das técncas mas conhecdas para a determnação de formas geométrcas que passam por um dado conjunto de pxels é a Transformada de Hough. Trata-se de uma técnca robusta, capaz de dentfcar lnhas retas e também outros tpos de feções. A fgura 23 mostra o prncípo da técnca (Low, 99), que pode ser utlzada para localzar a posção de um círculo de rao conhecdo, passando por um dado conjunto de pxels.
47 30 y Pontos conhecdos por onde o círculo procurado deverá passar. Localzação do centro do círculo procurado, dada pela nterseção dos círculos centrados nos pontos conhecdos. x Fgura 23 Localzação da posção do crculo de rao conhecdo passando por um conjunto de pxels (Low, 99). No caso de lnhas retas, a mesma déa é repetda, porém desta vez, para cada pxel da magem traça-se todo o conjunto de retas que passam pelo mesmo. Novamente a reta que passar smultaneamente pelo maor número de pxels deverá ser a reta procurada. Assm dado o conjunto de pxels p, p 2,...,p n, de coordenadas (x,y ), (x 2,y 2 )...(x n,y n ), são traçadas nfntas retas, que passam por cada um deles, conforme mostra a fgura 24. y p p 2 p 3 p 4 p 5 p 5 p 6 x Fgura 24 Posção dos pxels no espaço x-y e das retas possíves sobre estes. Utlzando a Transformada de Hough não é necessáro o traçado de tantas retas como mostra a fgura 24. Assm, partndo da equação da reta dada por: y = ax + b (3)
48 3 cada pxel p, de coordenadas (x,y ) é utlzado para gerar uma equação de reta dada por: b = y - ax (32) Enquanto que na expressão (3) os parâmetros são x e y, em (32) os parâmetros da reta são a e b. A fgura 25(a) mostra a localzação de cnco pxels, no sstema x-y e em (b) a localzação das cnco retas geradas, no sstema a-b. O ponto de nterseção das cnco retas defne os valores dos parâmetros a e b, da reta procurada no sstema x-y. y b p =(x,y ) p 5 =(x 2,y 2 ) p 4 =(x 2,y 2 ) p 3 =(x 2,y 2 ) p 2 =(x 2,y 2 ) (a) x (b) p =(a,b) a Fgura 25 Transformação entre os espaços de parâmetros x-y e a-b (pela Transformada de Hough). (a)pxels no espaço x-y, e (b) Lnhas no espaço a-b. Utlzando esta parametrzação, é precso alocar na memóra do computador, um vetor de dmensão m x n, onde m é o número de valores que a pode assumr e n é o número de valores que b pode resultar a partr de (32) (m e n consttuem a dscretzação do parâmetro a e b). A fgura 26 mostra o algortmo para a mplementação da Transformada de Hough utlzando esta parametrzação. Algortmo Transformada de Hough - (espaço a,b) Faça acumuladores A(a,b)=0; (Quantze o espaço do parâmetros (a-b) adequadamente;) 2 Dference a magem utlzando o Operador de Sobel (a) gx = gradente-x (b) gy = gradente-y 3 Se a magntude da borda é maor que um threshold, calcule a = (gy/gx); 4 Calcule b = -ax +y ; 5 Incremente o acumulador A(a,b) = A(a,b) + ; 6 Repta (3) até (5) para todos os pxels de borda; 7 Os pcos no acumulador A(a,b) fornecem os gradentes da lnha e as nterseções; Fgura 26 Algortmo para a Transformada de Hough no espaço a-b (Hussan, 99).
49 32 No algortmo apresentado na fgura 26 uma grande smplfcação do processo é realzada, sendo calculado o valor de b apenas para um valor de a gual a dreção da borda. Na prátca, esta smplfcação não se mostra totalmente confável, pos a dreção (obtda na etapa de detecção de bordas) dos pxels de borda, não é muto precsa, devdo, prncpalmente, aos problemas de alasng que podem ser vsualzados na fgura 27. Utlzando o gradente em uma vznhança 3x3 (A B) A = Dreção no ponto B = Dreção no ponto Fgura 27 Influênca do alasng na determnação da dreção dos gradentes. De qualquer forma, o conhecmento da dreção dos pxels permte que sejam traçadas apenas lnhas retas que possuem uma dreção com valor próxmo às dreções dos pxels, ou seja, para alguns valores acma e abaxo de a, o que deverá tornar os resultados mas confáves (fgura 28). y Fgura 28 Utlzando de um conjunto de lnhas com nclnações próxmas a dreção do pxel. x A parametrzação apresentada na expressão (3) possu o nconvenente de não ser capaz de trabalhar com retas vertcas (quando a ± ). Neste caso, a utlzação da parametrzação (33) se mostra capaz de contornar tal problema.
50 33 ρ = x cosθ + y senθ (33) Na mplementação da Transformada de Hough com a representação θ - ρ, para cada pxel da magem, com coordenadas x e y, faz-se varar o valor de θ em (33) e obtém-se, assm, o valor de ρ. O resultado obtdo pode ser vsualzado no gráfco apresentado na fgura 29(b), desta vez no espaço θ e ρ. ρ (b) (a) Curva obtda com x,y Curva obtda com x 2,y 2 Curva obtda com x 3,y 3 Pontos no espaço x-y Os pontos de nterseção determnam os valores de ρ e θ, para a lnha que passa pelos pontos no espaço x-y Fgura 29 (a) Pxels no espaço x-y e (b) Transformada de Hough utlzando a parametrzação ρ-θ. Utlzando esta nova parametrzação, é precso alocar na memóra do computador um array de dmensão m x n, onde m é o número de valores que θ pode assumr e n é o número de valores que ρ pode resultar em (33) (m e n consttuem a dscretzação dos parâmetros θ e ρ). Novamente, uma grande smplfcação do processo pode ser feta se for conhecda a dreção da borda em cada pxel, desta vez, lmtando os valores de θ em um pequeno ntervalo em torno do valor da dreção. A fgura 30 mostra o algortmo usado para mplementar a Transformada de Hough (Jan et al., 995) usando esta parametrzação. Algortmo Transformada de Hough - (espaço θ-ρ) - Quantze o espaço do parâmetros (θ-ρ) adequadamente; 2 - Assuma que cada célula no espaço dos parâmetros é um acumulador; ncalze todas as células com zero; 3 - Para cada pxel (x,y) no espaço magem, ncremente em cada um dos acumuladores, que satsfaçam a equação (33) - (fazendo θ varar e calculando ρ); 4 - Os máxmos nos acumuladores correspondem aos valores de ρ e θ procurados; Fgura 30 Algortmo para a Transformada de Hough no espaço θ-ρ.
51 34 Além de ser uma técnca bem conhecda, a Transformada de Hough tem anda como grande vantagem, ser capaz de dentfcar lnhas retas em bordas que tenham sofrdo algum tpo de quebra (tas stuações são muto comuns no processamento de magens aéreas, onde construções ou mesmo árvores ocultam bordas do tpo dvsa de terrenos ou guas e sarjetas - oclusão). Um problema que dfculta a utlzação da Transformada de Hough é que uma dscretzação muto densfcada dos parâmetros θ e ρ mplca na necessdade de uma estrutura (array de acumuladores) muto grande. Por outro lado, a utlzação de uma quantzação nsufcente pode não apresentar a precsão desejada nos resultados. Um outro problema que ocorre é o aparecmento de falsos pcos nos acumuladores, provocados pelas nterseções das curvas geradas por retas muto grandes, que superam os valores de acumuladores devdos a pequenas retas. Um exemplo desta stuação é apresentada na fgura 3; no caso, observa-se que o alnhamento dos pxels da forma em que se encontram nduz a Transformada de Hough a dentfcar as três horzontas, de quatro pxels cada, quando o que se devera encontrar são as quatro retas vertcas de apenas três pxels cada. Este problema pode ser evtado, fazendo o valor de θ varar apenas em uma faxa próxma ao valor da dreção da borda. y Fgura 3 Problema de falsos pcos na Transformada de Hough. x Agrupamento θ-ρ Este método pode ser vsto como uma otmzação da Transformada de Hough, também se utlzando da parametrzação θ e ρ. A mportânca do método está em apresentar uma organzação na seqüênca de operações, que permte uma mplementação computaconal mas efcente, devdo à otmzação da estrutura necessára, pos, neste caso, não há necessdade de uma estrutura de acumuladores regular, e geralmente, muto esparsa (Dudan e Luk, 978). O método pode ser descrto através dos seguntes passos:
52 35 - Para cada pxel da magem cujas coordenadas são x e y, e onde se conhece a dreção θ calcula-se ρ a partr deste três elementos, utlzando a expressão (33); 2- O conjunto de pxels assm obtdos (x,y,θ,ρ ) é dvddo em grupos, classfcados ncalmente de acordo com θ. Nesta etapa é comum a utlzação de uma hstograma de freqüêncas para θ, onde os pcos do hstograma defnem o número e os valores de classes a serem utlzadas; 3- Em uma próxma etapa, os grupos ou classes defndos em 2 são também repartdos em subgrupos, desta vez usando como crtéro o elemento ρ. Novamente um hstograma de freqüêncas (de ρ) pode ser utlzado, e desta vez os pcos do hstograma defnem as subclasses a serem utlzadas; 4- Cada subclasse de ρ defne a localzação das retas (de acordo com a posção em relação a orgem - translação), enquanto que as classes em θ defnem as nclnações (rotação); 5- Verfca-se a contnudade dos segmentos dentro dos subgrupos. A fgura 32 mostra o fluxo de dados utlzado neste método. θ θ Freqüênca p, p 2, p 3, p 4 p 5, p 6, p 7, p 8, p 9, p 0 p p p2 p3 p4 θ 2 ρ p5 p 6 p7 p8 θ θ 2 θ ρ 2 p2 p p0 p9 ρ 3 ρ Freqüênca Freqüênca p, p 2, p 3, p 4 p 5, p 6, p 7, p 8 p 9, p 0, p, p 2 ρ ρ ρ 2 ρ 3 ρ x y θ ρ x 2 y 2 θ2 ρ2 x 3 y 3 θ 3 ρ 3 x 4 y 4 θ 4 ρ 4 x 5 y 5 θ 5 ρ 5 x 6 y 6 θ 6 ρ 6 x 7 y 7 θ7 ρ7 x 8 y 8 θ 8 ρ 8 x 9 y 9 θ 9 ρ 9 x 0 y 0 θ 0 ρ 0 x y θ ρ x 2 y 2 θ2 ρ2 x y x y θ θ x 2 y 2 ρ x 2 y 2 θ x 3 y 3 x 3 y 3 θ x 4 y 4 x 4 y 4 θ x 5 y 5 x 5 y 5 θ2 x 6 y 6 ρ2 x 6 Y 6 θ2 x 7 y 7 x 7 y 7 θ2 θ2 x 8 y 8 x 8 y 8 θ2 x 9 y 9 x 0 y 0 x 9 y 9 θ 2 x y ρ3 x0 y0 θ2 x2 y2 x y θ2 Fgura 32 Fluxo dos dados no método de agrupamento θ-ρ x2 y2 θ2
53 36 A grande vantagem desta forma de organzar os pxels, está em permtr a utlzação de uma estrutura computaconal bem mas smples, do que a Transformada de Hough. Enfm, apesar da Transformada de Hough ser uma técnca robusta e muto conhecda, apresenta grandes dfculdades de mplementação (necessdade de uma estrutura muto grande para apresentar resultados adequados). Além dsso, não consegue defnr o níco e o fm das retas determnadas (o que pode ser realzado em uma etapa posteror à dentfcação das lnhas retas). Por outro lado, os problemas de oclusão que ocorrem com freqüênca em magens aéreas podem ser resolvdos com o apoo deste método. A forma de mplementação utlzando o agrupamento θ -ρ representa uma excelente melhora no processo, dspensando a necessdade de uma estrutura muto grande, porém, devdo ao fato de apoar-se também na nformação de dreção dos pxels de borda, a mesma deve apresentar problemas, uma vez que não se observa na prátca uma total confança nesta nformação (conforme mostra a fgura 27) Método da varredura e rotulação (scan & label) Este método faz uma varredura e rotulação dos pxels da magem (Zhou et al., 989), (Venkasteswar, 994) e (Tommasell, 999), de forma que pxels com uma mesma dreção e vznhos recebem um mesmo rótulo. Ao mesmo tempo, uma estrutura de dados é utlzada para guardar as característcas das retas que estão sendo defndas (pxel ncal(x,y ), pxel fnal(x f,y f ), dreção(dr), número de pxels). Neste método a magem é percorrda da esquerda para a dreta e de cma para baxo e, para cada pxel, de acordo com a sua dreção são verfcados os vznhos (a vznhança a ser consderada depende da dreção do pxel examnado pxel atual). Caso seja encontrado nas proxmdades do pxel atual algum vznho já rotulado, então o pxel atual recebe o mesmo rótulo. Operando desta forma, um segmento começa a ser defndo. No momento da análse dos pxels, é utlzada a segunte convenção.
54 37 Ponto Rótulo (a) Ponto Ponte Ponto Rótulo Ponto Atual (b) Ponto Atual Fgura 33 Classfcação dos pxels envolvdos no processo de conexão. Entende-se por pxel vznho do pxel atual, o pxel que se localza no máxmo a uma dstânca gual a dos, e que possua a mesma dreção que o pxel atual. No caso da dstânca ser gual a dos, sgnfca que exste um pxel entre o pxel atual e o seu vznho (pxel rótulo), que também não possu um rótulo; neste caso, deve tratar-se de um pxel sem magntude e sem dreção e tas nformações podem ter sdo elmnadas na etapa de lmarzação, ou anda, nunca terem exstdo, devdo a uma pequena quebra do segmento). Este pxel representa um buraco na lnha que está sendo traçada, e para evtar este problema, ele deve também ser ncluído nesta lnha. Este pxel recebe a denomnação de pxel ponte, por fazer a lgação entre o pxel atual e o pxel rótulo. O pxel atual deve receber o rótulo do pxel vznho. O pxel ponte deve receber o mesmo rótulo, a mesma dreção e uma magntude, que pode ser a méda entre as magntudes dos pxels atual e vznho. Observa-se na mplementação a necessdade de uma estrutura, que deverá receber os dados das retas conectadas no processo. Uma possível estrutura a ser utlzada é formada pelos campos apresentados na fgura 34. struct lnha { nt x; // coordenada x do pxel ncal da reta nt y; // coordenada y do pxel ncal da reta nt xf; // coordenada x do pxel fnal da reta nt yf; // coordenada y do pxel fnal da reta nt dr; // dreção dos pxels da reta nt n; // número de pxels na reta float a; // parâmetro a da reta float b; // parâmetro b da reta bool horz; // horzontal = true e vertcal = false }; Fgura 34 Estrutura de dados utlzada para armazenar os atrbutos dos segmentos.
55 38 A fgura 35 mostra as vznhanças a serem verfcadas no processo de conexão dos pxels, de acordo com as dreções de seus gradentes. Ângulos de 90 o e 270 o Ângulos de 20 o e 300 o Ângulos de 50 o e 330 o Ângulos de 0 o e 80 o Ângulos de 30 o e 20 o Ângulos de 60 o e 240 o Fgura 35 Vznhanças a serem verfcadas no processo de conexão (Zhou et al., 989) (Venkateswar-Chellapa, 992),(Tommasell, 999) Elmnação de lnhas nsgnfcantes Após a realzação da rotna de varredura e rotulação, conforme descrta anterormente, verfca-se a presença de uma grande quantdade de lnhas que apresentam um tamanho nsgnfcante (em mutos casos, apenas um pxel). Por outro lado, pode ocorrer também que estes pequenos segmentos, podem ser reconectados uns aos outros, formando segmentos maores. Assm, parece mas nteressante que antes de se fazer a elmnação dos segmentos com poucos pxels, se faça a conexão dos segmentos colneares, descrta na próxma seção.
56 Conexão de segmentos colneares Uma estratéga que pode ser utlzada para fazer este processamento é nvestgar as vznhanças de cada pxel ncal e fnal de todos os segmentos obtdos, e verfcar se exste nas proxmdades destes, o níco ou fm de um outro segmento. Caso ocorra esta stuação é precso verfcar anda se eles possuem uma mesma dreção, e neste caso, deve ser feta a unão dos dos segmentos, formando um únco. Por fm os atrbutos do novo segmento precsam ser atualzados, sendo fetas as devdas alterações na estrutura de dados que mantém o controle da localzação do níco e fm deste segmento, bem como elmnação dos segmentos que foram undos. Na prátca, o prmero segmento pode ser atualzado para conter as característcas do novo segmento, e o segundo segmento deve ser elmnado, ou seja, ter seu rótulo desatvado. Todo este processamento pode ser realzado dretamente na estrutura de dados gerada na etapa anteror, permtndo uma boa performance no processamento, se comparada a uma varredura na magem dgtal, pos, enquanto a magem dgtal pode possur alguns mlhões de pxels, a estrutura deverá ter alguns mlhares de vetores. Novamente a nformação da dreção das lnhas pode ser utlzada para uma melhora na forma como as nvestgações na vznhança de um pxel fnal ou ncal devem ser fetas. A fgura 36 mostra as vznhanças que devem ser nvestgadas, para o caso de uma lnha reta com dreção α X X X X X X X X X X X X X X X X X X O X X X X X X X X X X X X X X X X X X X X X O X X X X X X X X X X X X X X X O O O O Fgura 36 Detalhe das vznhanças a serem nvestgadas no processo de conexão de segmentos colneares. Para cada segmento, obtém-se na estrutura a posção dos pxels ncal e fnal da reta x,y e x f,y f ; verfca-se no espaço da magem se na vznhança exste algum pxel, que pertença a um outro segmento j (sto ocorre se o pxel vznho possu rótulo
57 40 dferente do pxel atual). É mportante também verfcar se a reta j possu uma dreção próxma à dreção da reta (uma dferença mínma é acetável nesta etapa). No caso de se encontrar algum pxel nesta stuação, o segmento j terá todos os seus pxels rotulados com o valor do rótulo do segmento. A troca de rótulos é realzada no espaço magem, e pode ser resolvda de uma forma sufcentemente satsfatóra, utlzando uma janela lmte, que contenha os pxels níco e fm do segmento j. Por este método todos os pxels pertencentes à menor janela que contém o segmento serão processados. Uma outra alternatva mas efcente é fazer a troca dos rótulos utlzando um algortmo recursvo que se desloca dentro do segmento por um processo de nundação (seed-fll). Apesar da recursão ser mas dfícl de ser construída, apenas os pxels com o mesmo rótulo são processados. Conforme já observado anterormente (fgura 27), a etapa de detecção de bordas nem sempre consegue os mesmos valores de dreção para todos os pxels pertencentes a uma mesma borda, e assm a etapa de conexão de segmentos colneares precsa consderar pequenas dferenças de dreção, no momento em que analsa a junção de dos segmentos. Em mutos casos, dos segmentos próxmos, que possuem pequenas dferenças de dreção podem ser conectados em um únco segmento, sem problema algum. Por outro lado, exstem stuações em que tas segmentos não deverão ser undos. Um crtéro que pode ser utlzado para defnr em quas stuações dos segmentos podem ser undos é mostrado na fgura 37. b d 2 d a Fgura 37 Crtéro adotado para realzar conexão dos segmentos colneares.
58 4 Na fgura 37, os segmentos a e b devem ser undos caso as dstâncas d e d 2 sejam menores que um fator de qualdade prevamente defndo. Os valores de d e d 2 são defndos pela dstânca entre os pxels fnas dos segmentos a e b, e a reta defnda pelos extremos opostos dos segmentos, sendo estas dstâncas obtdas conforme mostra a fgura 38. P 2 d r P 0 P u v Fgura 38 Geometra utlzada para defnr as dstâncas d e d 2. Na fgura 38, a dstânca entre o ponto P o e a reta r é dada por d( P, r) 0 = u ^ v (34) u Fnalmente, é precso consderar que os templates apresentados na fgura 36, utlzados para verfcar a vznhança dos pxels ncal e fnal dos segmentos, em busca de outros segmentos nas proxmdades, mplcam novamente no aparecmento de pxels ponte (pxels que devem ser lgados entre os dos segmentos que estão sendo undos). No caso da dreção gual a 0 e 80 verfca-se a stuação apresentada na fgura 39.
59 O A O P A O P P A O A O A O P A A A O P O P P O P P A O = pxel atual; A : pxel na vznhança; P : pxel ponte Fgura 39 Localzação de alguns pxels pontes no processo de conexão de segmentos. Conforme menconado anterormente, após a junção de dos segmentos, as nformações sobre o segmento obtdo devem ser atualzadas na estrutura de lnhas. A quantdade de pxels pertencentes ao mesmo, é dada pela soma dos totas de pxels pertencentes aos dos segmentos que foram undos, e anda dos pxels ponte (caso ocorram). A nformação de dreção é um pouco mas dfícl de ser obtda, pos segmentos com dreções próxmas (porém dferentes) podem ser undos, caso seja satsfeta a condção mposta na fgura 37, e neste caso, o segmento obtdo pela unão dos dos segmentos orgnas precsa receber alguma dreção, que deve ser próxma das dreções dos segmentos undos. 2.7 AJUSTAMENTO DE RETAS A próxma etapa a ser realzada após a dentfcação dos pxels que pertencem a um dado segmento, é a determnação da equação da reta que melhor se ajusta a estes pxels (ajustamento). O consagrado Método dos Mínmos Quadrados (M.M.Q.) pode ser
60 43 utlzado nesta etapa, apresentando resultados adequados. O método é bem smples e consste em mnmzar o somatóro dos quadrados das dstâncas entre os pxels e a reta em que são ajustados. O método permte anda que, para o caso de se obter uma mnmzação nsufcente, a reta possa ser quebrada em outras menores, até se sejam obtdas retas adequadas aos pxels detectados, atendendo a um fator de qualdade prevamente estabelecdo. Desta forma é estabelecdo um controle de qualdade dos resultados obtdos Introdução ao Método dos Mínmos Quadrados (M.M.Q.) Dada uma seqüênca de pontos S,j = ( (x,y ), (x 2,y 2 ),..., (x n,y n ) ), que são obtdos por meo de uma função f, desconhecda, deseja-se determnar uma função g, que melhor se aproxma a f. A tentatva de aproxmar uma função f, por uma função g, ntroduz um erro em cada um dos pontos conhecdos, que normalmente é chamado resíduo v. Como o que se procura é obter g, de forma que a mesma seja a melhor aproxmação de f, o objetvo a ser alcançado então é fazer com que estes resíduos sejam mnmzados. Uma prmera abordagem leva então a conclur que o que se deve fazer é: n = v = 0mínmo (35) Esta smplfcação possblta que erros postvos elmnem erros negatvos, não apresentando bons resultados. Uma segunda tentatva pode levar então a utlzação dos valores absolutos de v, n = v = = 0 mínmo (36) Porém, sto também apresenta um nconvenente (Humes et al., 984), quando se tenta obter a mnmzação, o que é obtdo pela prmera dervada gual a zero (a função valor absoluto não possu dervada no ponto zero). Fnalmente uma forma smples e que se mostra vável é a utlzação dos quadrados dos v. Assm procura-se obter:
61 44 n = v 2 = 0mínmo (37) Este crtéro para a aproxmação de duas funções é conhecdo como Método dos Mínmos Quadrados M.M.Q., sendo ntensamente utlzado nos problemas de ajustamento, nas mas dversas áreas. Neste trabalho, deseja-se obter as equações das retas que melhor se ajustam aos conjuntos de pxels rotulados na etapa anteror como pertencentes às bordas. Assm, dada a equação da reta: y = ax + b (38) onde, são conhecdos os valores de x e y, deseja-se obter os valores de a e b. Embora o modelo sugra a aplcação do Método Combnado (Gemael, 994), uma smplfcação pode ser feta, quando se assume que o parâmetro x não possu erros e, assm, é possível a aplcação do Método paramétrco, com a segunte construção: Sejam: L b : vetor dos valores observados; V : vetor dos resíduos; L a : vetor dos valores observados ajustados; então L a = L b + V (39) e X 0 : Vetor dos valores aproxmados dos parâmetros; X : Vetor correção; X a : Vetor dos parâmetros ajustados; X a= X 0 + X (40) Por este método, o modelo matemátco a ser usado deve ser: L a = F(X a ) (4)
62 45 Aplcando (39) e (40) em (4), resulta L b + V = F(X 0 + X) (42) Para o caso de sstemas não lneares, é convenente uma lnearzação por Taylor e, assm a expressão (42) fca: L b F + V = F(X 0 + X) = F(X 0 ) + X (43) X a X = X a 0 Em seguda, desgnando a função dos parâmetros aproxmados por L 0 obtém-se: L 0 = F(X 0 ) (44) e chamando a matrz das dervadas parcas de A, é possível defnr o vetor de correções X, dado por: X = - (A t PA) -. A t PL (45) com L = L 0 - L b. Neste trabalho, ajustando a seqüênca de pxels X(,j) = ( (x,y ), (x 2,y 2 ),..., (x n,y n ) ), em uma função da forma: o sstema de equações fca: y = ax + b (46) y = a.x + b + v y = a.x + b + v (47) y = a.x + b + v n ou v = a.x + b - y v = a.x + b - y (48) v = a.x + b - y n que utlzando a notação matrcal resulta em:
63 46 x x 2 A =... xn y y2 L =... y n (49) e assm v x v2 x2 = vn xn y a y2 + b... yn (50) Para o caso de sstemas lneares, a solução obtda em (45) é medata, pos o sstema não precsa ser lnearzado (usando uma aproxmação por Taylor). Novamente verfca-se a ocorrênca de problemas com relação a parametrzação adotada (y=ax+b), pos, utlzando a seqüênca S,j = ( (x,y ), (x 2,y 2 ),..., (x n,y n ) ), para os casos em que todos os valores y são guas (retas vertcas), o sstema não pode ser resolvdo, pos a matrz A t PA não possu uma nversa. Devdo a este problema que deve ocorrer em váras stuações, antes de tentar fazer a nversão da matrz é precso verfcar se a mesma possu tal nversa. Uma condção necessára e sufcente para que uma matrz quadrada seja nversível é que o seu determnante seja dferente de zero (Carol, 984). A abordagem genérca apresentada neste tópco pode ser partcularzada, para o caso em que os pxels pertencentes às seqüêncas são sempre ajustados por lnhas retas. Este caso partcular do ajustamento é conhecdo como Regressão Lnear (uma termnologa muto antga, orgnada nas Cêncas Socas (Press, 992) ). Esta partcularzação permte a construção de um modelo mas smples de ser vsualzado (Humes et al., 984), e anda dspensa o uso de operações com matrzes e vetores (subtrações, produtos e nversões). Este modelo toma a seqüênca de pxels S,j = ( (x,y ), (x 2,y 2 ),..., (x n,y n ) ), e a função g, escolhda como a função que mas se aproxma de f (função desconhecda que gerou a seqüênca S,j ). O resíduo em cada pxel (x,y ) é determnado por: v = y g(x ) = y a bx (5) em seguda determnam-se a e b, que mnmzam os quadrados dos resíduos em (5), ou seja, mnmza
64 47 = = = n n b ax y v 2 2 ) ( (52) o que pode ser feto tomando as dervadas parcas de (52) em relação à a e b guas a zero, fcando então: = = n x b ax y 0 ) )( ( 2 (53) e = = n b ax y 0 ) )( ( 2 (54) que podem ser escrtas como: n n n x y x b x a = = = = + 2 (55) = = = = + n n n y b x a (56) ou utlzando a notação matrcal, chega-se fnalmente ao sstema (57). = = = = = = = n n n n n n y y x b a x x x 2 (57) cuja solução é dada por: 2 2 = = = = = = = = n n n n n n n x x y x y x a (58) e = = = = = = = = n n n n n n n x x x y y x x b (59)
65 48 Computaconalmente, a forma que (58) e (59) aparecem em Boratto (987) é mas convenente para ser utlzada nos algortmos (equações (60) e (6)). e a = b n = n = x y n x 2 = n n = N x N n x y 2 (60) y x = a N N (6) = = A determnação dos parâmetros a e b também pode ser feta em função do determnante da matrz, fcando da segunte forma (Tommasell e Tozz, 993): a = ( N x y x y ) (62) t det( A A) e 2 + b = ( x x y x y ) (63) t det( A A) Uma solução que pode ser adotada para evtar o problema com as retas vertcas é utlzar duas parametrzações dferentes, cada uma adequada às retas apresentadas. A sugestão é utlzar para segmentos aproxmadamente horzontas (onde ocorre uma boa varação na coordenada x dos pxels) ou com pequena nclnação, a equação (64). y = ax + b (64) No caso de segmentos aproxmadamente vertcas (onde as coordenadas x dos pxels não varam) ou com grande nclnação, uma modfcação na parametrzação (64) pode ser feta de forma a resolver o problema (Tommasell e Tozz, 993). x = a*y + b* (65) A fgura 40 mostra as regões onde utlzar cada uma destas formas paramétrcas para representar as retas.


66 49 45 parametrzação y = ax + b parametrzação x = a*y + b* Fgura 40 Quantzação utlzada no processo de detecção de bordas, e demas etapas do processo de vetorzação, e as parametrzações mas convenentes usadas em cada regão Problema com o M.M.Q. Os fltros para detecção de bordas mplementados (Sobel e Nevata e Babu) não apresentam um bom comportamento nos cantos das feções, e sto precsa ser levado em consderação no processo de ajustamento da reta sobre o conjunto de pxels da borda. A fgura 4 mostra a reta que será ajustada sobre um dado conjunto de pxels pertencentes a uma borda. Fgura 4 - Lnha reta obtda com o Método dos Mínmos Quadrados. A fgura 42(a) mostra o detalhe de um canto de uma feção; em (b) tem-se a borda obtda no processo de detecção (usando o detetor de Nevata e Babu após a etapa de afnamento de borda), onde é possível notar que os pxels da borda horzontal sofreram um deslocamento.
 em destaque apresentam o posconamento que aparece em detalhe em (a).")
67 50 (a) (b) (c) Fgura 42 Problema apresentado pelo detetor de bordas (Nevata e Babu) nos cantos das feções. Na fgura 42, os pxels dentfcados como pertencentes à borda horzontal (b) em destaque apresentam o posconamento que aparece em detalhe em (a). A lnha tracejada é a lnha da borda procurada, e a lnha contínua é a que será obtda utlzando o Método dos Mínmos Quadrados. Neste caso, como os erros não possuem uma dstrbução normal, (Jan et al., 995) o método dos mínmos quadrados tal como defndo anterormente não é uma boa opção. Uma possível solução para este caso é utlzar a medana mínma quadrada (a medana é um estmador mas robusto que a méda, para defnr um valor central (Press, 992). A fgura 43 permte uma comparação entre os resultados obtdos com a utlzação destes dos métodos, para o mesmo conjunto de pxels apresentados na fgura 42. (a) (b) Fgura 43 (a) reta obtda com o método dos mínmos quadrados e (b) reta obtda utlzando a condção da medana mínma quadrada.
68 5 Enquanto o método dos mínmos quadrados é amplamente conhecdo e largamente utlzado, o método que utlza como condção a ser satsfeta a medana mínma quadrada (também conhecdo como método dos mínmos quadrados com detecção de erros) não é tão conhecdo. A fgura 44 mostra o algortmo para este método. Algortmo Regressão Medana Mínma Quadrada. Assuma que exstem n pxels e p parâmetros no modelo lnear Escolha p pxels de forma aleatóra do conjunto de n pxels; 2 Calcule a dstânca do modelo até os p pxels; 3 Calcule a medana dos quadrados das dstâncas; Repta os passos -2-3 até que seja encontrada uma medda com a medana sufcentemente pequena, ou um número pré defndo de reamostragens tenha sdo atngdo. Fgura 44 Algortmo para a regressão utlzando a medana mínma quadrada Aproxmação de polgonas Devdo a problemas de Alasng, já apresentados anterormente, ocorre a necessdade de se conectar pxels de borda de dreções dferentes. Nos processos posterores, dependendo da curvatura dos segmentos detectados, o ajustamento não deverá funconar adequadamente. Uma solução que pode ser adotada para resolver este problema é a quebra do segmento (splttng), em dos menores. Entre os extremos dos segmento é traçada uma lnha reta, e o pxel do segmento que apresentar a maor dstânca (eucldana) a esta lnha será o pxel de quebra. Para os dos novos segmentos também pode ser aplcado o mesmo procedmento, caso necessáro, e o processo todo pode se repetr, até que os segmentos obtdos atendam as necessdades de lneardade exgdas (após o ajustamento apresentem um pequeno resíduo). A fgura 45 mostra este método sendo aplcado em um segmento de borda. Após a quebra de um segmento, utlzando este método, os segmentos resultantes podem ser reconectados com outros segmentos nas proxmdades, pela repetção da etapa de conexão de segmentos colneares, o que caracterza a operação de reconexão (merge), caso seja atendda a condção apresentada na fgura 36.
69 52 (a) d d 2 d 2 > d d3 > d 4 (b) d 3 d 4 (c) (d) Fgura 45 (a) Segmento orgnal, (b) dos segmentos obtdos após quebra no pxel de d 2, (c) três segmentos obtdos após quebra no pxel de d 3, (d) três segmentos lneares obtdos.
70 _ 53 CAPITULO 3 IMPLEMENTAÇÃO E TESTE DE UM AMBIENTE PARA A EXTRAÇÃO DE LINHAS RETAS 3. O SISTEMA DESENVOLVIDO O sstema desenvolvdo para a realzação dos expermentos fo mplementado utlzando a lnguagem C++, sendo utlzado o ambente de programação C ++ Bulder, da Borland Internatonal, Inc. A escolha por tal ferramenta se justfcou por ser um ambente de alta produtvdade, que tem ncorporados os mas avançados recursos de programação (programação orentada a objetos e eventos) e também por oferecer facldades para a manpulação de magens (letura e escrta do arquvo, e também acesso aos elementos da magem pxels) de uma forma bem smples. Com o objetvo de permtr um acompanhamento dos processamentos realzados (análse vsual dos resultados), o sstema fo projetado com três áreas de magens, cada uma com uma resolução de 300 por 220 pxels. A prmera área é destnada a entrada de magens, sendo referencada neste trabalho como Imagem de Entrada (ImE). Nesta área pode ser carregada uma magem dretamente do dsco, ou anda, uma cópa da magem que no momento está na área três ou dos. A segunda área de magem é destnada ao armazenamento temporáro de magens (swap), e a tercera área de magem é utlzada para apresentar os resultados obtdos com o processamento da magem de entrada. A fgura 46 mostra grafcamente a estrutura adotada, e também o menu de operações construído no programa desenvolvdo.
71 _ 54 (a) Imagem entrada Imagem 2 temporára Processamento da magem Imagem 3 saída Hstograma da magem 3 (b) Fgura 46 (a) Menu de operações do sstema desenvolvdo e (b) detalhe do fluxo de processamento das magens. Todas as áreas de magens apresentadas na fgura 46 apresentam recursos para amplação (zoom), pelos fatores dos, quatro e ses. Este recurso se mostra muto mportante na etapa de análse vsual dos resultados. As magens nas três áreas podem ser salvas em dsco, e também podem ser carregadas a partr do dsco, embora o fluxo mas comum seja fazer a carga na magem de entrada. O carregamento da magem de saída é nteressante quando se deseja fazer uma comparação vsual dos resultados obtdos com a vetorzação e, neste caso, carregase na magem de saída a magem orgnal e em seguda projeta-se os vetores sobre ela. A fgura 47 mostra a utlzação deste recurso. Fgura 47 Imagem orgnal sobreposta pelos vetores obtdos no processamento (lnha tracejada).
72 _ 55 Conforme mostra a fgura 46(a), o sstema desenvolvdo tem mplementado as rotnas para efetuar os processamentos que são mostrados na fgura 48, a qual mostra também a seqüênca de expermentos que podem ser realzados. Observando esta fgura verfca-se que é possível a obtenção de 44 dferentes combnações das etapas no processamento. Suavzação Fltro da méda 3X3 Fltro da medana 3X3 Fltro da medana com varânca mínma por regão Detecção de Bordas Lmarzação Sobel OTSU Prewtt PUN Nevata e Babu Trângulo OTSU MODIFICADO Afnamento Supressão Não Máxma Supressão Não Máxma generalzada Conexão Varredura e Rotulação Inundação (proposto) Ajustamento MMQ Fgura 48 Etapas a serem verfcadas no processo de detecção de feções lneares. 3.2 CONSTRUÇÃO DA IMAGEM PADRÃO O sstema oferece a opção para gerar a magem padrão utlzada neste trabalho, desenhando o contorno de três polígonos que podem ou não serem preenchdos. A opção de manter os polígonos sem o preenchmento é útl para a análse de resultados, no momento de se verfcar quantos pxels de borda foram realmente detectados, pos são conhecdas as verdaderas posções dos pxels de borda e também as posções obtdas após o processamento. 3.3 MODIFICAÇÃO DO SINAL Nesta opção estão dsponíves algumas operações que podem ser utlzadas para melhorar a vsualzação dos resultados obtdos, ou mesmo para melhorar o resultado fnal, quando tas aplcações são utlzadas entre uma etapa e outra. Aumenta Esta operação aumenta o nível do snal, multplcando por dos todas as magntudes dos pxels da magem de entrada (não permtndo que os valores
73 _ 56 ultrapassem o valor máxmo 255), ou seja, dada a magem de entrada ImE, os valores dos pxels da magem de saída ImS são dados por: 2.ImE se Im E < 28 Im S = (66) 255 casocontráro Dmnu Esta operação dmnu o nível do snal, dvdndo por dos todas as magntudes dos pxels da magem de entrada, assm, dada a magem de entrada ImE, os valores dos pxels da magem de saída ImS são dados por: Im E se ImE > 2 Im S = (67) 0 caso contráro Auto-escala Esta operação maxmza a dstrbução das magntudes dos pxels na faxa de 0 à 255 (stretch). Neste caso, dada a magem de entrada ImE, os valores dos pxels da magem de saída ImS são defndos por: ImS Valor máxmodaescala = (ImE ImEmn ) (68) Im E Im E max mn Equalzação do Hstograma Trata-se de uma operação que tenta melhorar a dstrbução dos tons de cnza da magem. Nos cálculos são utlzadas a freqüênca de cada tom de cnza na magem (geralmente utlza-se um hstograma) e também o valor da freqüênca acumulada, que consste na soma de todas as freqüêncas até o valor do brlho atual. Os novos valores dos pxels da magem equalzada são dados por (69) (Low, 99). NºTons de cnza total x freq.acumulada valor equalzado = max 0, round (69) NºdeColunasx NºdeLnhas
74 _ 57 Conversão para tons de cnza Esta operação faz a conversão de magens colordas, com suas componentes de cor R, G e B, para magens de tons de cnza, através do cálculo da lumnânca dos pxels (Gonzalez, 993), dada por (70). Lumnânca = 0,299.R + 0,587.G + 0,4.B (70) Inverte Imagem Resulta no negatvo da magem, sendo algumas vezes utlzada para uma melhor vsualzação de alguns detalhes. Dada a magem de entrada ImE, os valores dos pxels da magem de saída ImS são dados por (7). ImS = 255 ImE (7) 3.4 ETAPA DE SUAVIZAÇÃO Nesta etapa estão mplementados os fltros da méda (máscaras 3x3 e 5x5), medana e medana com varânca mínma por regão. O fltro da méda é o que apresenta uma maor suavzação, porém atenuando muto a nformação de borda (prncpalmente quando se utlza a máscara 5x5). O fltro da medana apresenta um bom resultado, elmnando as altas freqüêncas (ruídos e excesso de detalhes que dfcultam a detecção das feções mas mportantes) e anda preservando as bordas. O tercero tpo é uma varação do fltro da medana, e apresenta como vantagem a utlzação de uma vznhança maor (ver seção 2.2.3). Este fltro defne nove regões ao redor do pxel sob análse, verfcando a sua semelhança com os demas em cada regão; através da análse da varânca defne-se a provável regão à qual o mesmo deve pertencer (regão de menor varânca), e o valor assumdo para o pxel é a medana dos pxels da regão seleconada. Vsualmente percebe-se uma boa suavzação, e anda uma excelente preservação das bordas. A fgura 49 mostra os resultados obtdos com a aplcação destes fltros.
 fltro da méda 5x5, (d) Fltro da medana e (e) Fltro da medana com varânca mínma por regão. 3.")
75 _ 58 (a) (b) (c) (d) (e) Fgura 49 (a) Imagem orgnal, (b) resultado com a aplcação do fltro da méda 3x3, (c) fltro da méda 5x5, (d) Fltro da medana e (e) Fltro da medana com varânca mínma por regão. 3.5 ETAPA DE DETECÇÃO DE FEIÇÕES Com o objetvo de detectar os pxels de borda foram mplementados os operadores de Prewtt 3x3, Sobel 3x3, Sobel 5x5 e Nevata e Babu. Os resultados com a aplcação destes quatro operadores podem ser vsualzados na fgura 50.

76 _ 59 (a) (b) (c) (d) (e) Fgura 50 (a) Imagem orgnal, (b) resultado com a aplcação do operador de Prewtt 3x3, (c) Operador de Sobel 3x3, (d) Operador de Sobel 5x5, e (e) Operador de Nevata e Babu. Em áreas de muto ruído nota-se uma sensível dferença nos resultados obtdos pelos operadores. A fgura 5 mostra os resultados obtdos pelos operadores de Sobel e Nevata e Babu em uma magem sntétca com a presença de forte ruído.
.")

. A segur é descrto um método para a construção das máscaras de Nevata e Babu, que apresenta bons resultados. 3.5.")
77 _ 60 (a) (b) (c) Fgura 5 (a) magem orgnal, com muto ruído, (b) resultado da detecção utlzando o Operador de Sobel e (c) Operador de Nevata e Babu. (Artero e Tommasell, 999). Os bons resultados obtdos com o operador de Nevata e Babu motvaram o desenvolvmento de uma técnca para a construção das máscaras em tempo de execução. Assm, torna-se possível a obtenção de máscaras específcas para a detecção de dreções estabelecdas durante o processamento. No caso de um processo de detecção assstda, a partr do conhecmento da dreção de alguma borda, outras podem ser detectadas utlzando-se de uma máscara específca para a dreção desejada (extração seletva). A segur é descrto um método para a construção das máscaras de Nevata e Babu, que apresenta bons resultados Método para a construção das máscaras de Nevata e Babu O processo descrto a segur supõe que as máscaras são defndas de forma que uma célula tem o valor dado pela expressão: Valor = Área sob a reta Área sobre a reta (72)
78 _ 6 sendo que a reta consderada deve ser posconada de forma a passar pelo centro da máscara, e possur nclnação α a ser detectada. A fgura 52 mostra, grafcamente, a proposta de mplementação das máscaras. Área sobre a reta = ( ) 96 Área sob a reta = (+) 4 Valor resultante = ( ) 92 Fgura 52 Método mplementado para a construção de máscaras de Nevata e Babu. Por este método, o cálculo das máscaras fca totalmente reduzdo ao cálculo das áreas das células (acma e abaxo da lnha reta - que é defnda pelo ângulo da borda a ser detectada). Neste trabalho, para a obtenção de uma máscara m x n, fo utlzada a segunte geometra (após um gro de 90 graus), mostrada na fgura 53. lnhas α m colunas Fgura 53 Geometra utlzada no método. Lembrando que a equação da reta é dada por: y = ax + b (73) com a e b dados por : e a = arctan(α) (74)
79 _ 62 b = -ax c + y c (75) onde x c e y c são as coordenadas do centro da máscara a ser obtda, dadas por: e m xc = k 2 y c = n k (76) (77) Em (76) e (77), m e n são as dmensões da máscara, e para m n são produzídas máscaras retangulares. A constante k defne a quantdade de pontos que estão dentro de cada célula, e serve para controlar a qualdade dos resultados obtdos por este método, sendo que os testes executados mostraram que valores adequados são obtdos com k>00. O método sugerdo neste trabalho, para o cálculo das áreas, é bastante smples e assemelha-se à forma como as pessoas faram para obtê-lo, caso dspusessem de uma grade (pxels), onde fosse possível contar o número de elementos que se stuam acma e abaxo da reta, cuja equação é conhecda em (73). A fgura 54 mostra como os elementos de cada célula são classfcados como acma e abaxo da reta. x f,y f x c,y c y e = ax f +b Fgura 54 Determnação da posção dos elementos acma e abaxo da reta. Na fgura 54, para todo elemento x f,y f da máscara, calcula-se y e = ax f + b, e se y e > y f então o elemento está abaxo da reta, e deve ser somado à área total da célula. Caso y e < y f então o elemento está acma da reta, e precsa ser subtraído da área calculada. O valor total a ser atrbuído à célula é dado por: Célula = Área total acumulada / k 2 (78)
80 _ 63 sendo k o mesmo valor defndo anterormente. Uma boa melhora no processamento pode ser obtda testando ncalmente todos os pontos lmtes de uma célula (canto superor esquerdo e dreto, e canto nferor esquerdo e dreto) e, caso todos estes se encontrem acma ou abaxo da reta, a célula receberá medatamente o valor 00 e 00 respectvamente.. A fgura 55 mostra as máscaras obtdas por este algortmo, permtndo uma comparação com as máscaras da fgura 4 (seção 2.3.6) graus 80 graus graus 20 graus graus 240 graus graus 270 graus graus 300 graus graus 330 graus Fgura 55 Máscaras geradas pelo método proposto.
81 _ 64 A segur, são apresentadas na fgura 56 algumas máscaras construídas por este método para a detecção de retas nas dreções 0 e 20 graus (dferentes daquelas apresentadas por Nevata e Babu). O denomnador do fator multplcatvo é defndo pela soma dos elementos postvos em cada uma das máscaras obtdas graus 20 graus Fgura 56 Máscaras geradas pelo software desenvolvdo. O método também permte a obtenção de máscaras com dferentes dmensões, o que pode ser útl para a detecção de lnhas maores, e consequentemente facltar o processamento na etapa posteror (conexão). 3.6 ETAPA DE LIMIARIZAÇÃO Para a realzação desta etapa o sstema tem mplementado os métodos de Otsu, Pun (Parker, 996) e o Método do Trângulo. Tas métodos de lmarzação são caracterzados como do tpo global, ou seja, para todos os pxels da magem é defndo um únco lmar. A fgura 57 mostra os resultados obtdos com a aplcação dos métodos de Otsu, Pun e do Trângulo. Para o caso destas magens, o método de Otsu apresenta bons resultados. O algortmo de Otsu e Pun utlzados neste trabalho foram mplementados a partr de Parker (996), que nclu o códgo fonte em um CD-Rom. Devdo a presença de áreas escuras e claras nas magens, verfca-se que é uma tarefa bastante dfícl a determnação de um únco lmar, que apresente bons resultados (Gonzalez, 993). Com o objetvo de trabalhar melhor com tas peculardades, foram desenvolvdos város métodos para a determnação de um valor de lmar, que agem localmente. Nestes métodos os valores obtdos são utlzados apenas no centro da regão utlzada para a obtenção do valor. Um método que se basea nesta déa (Parker, 996) é o método de Chow & Kaneko, que sugere a dvsão da magem em 49 regões (com
 (b) (c) Fgura 57 (a) Imagem orgnal de bordas, (b) resultado obtdo com o método de Otsu, (c) Método de Pun e (d) Método do Trângulo.")
82 _ 65 sobreposção), cada uma das quas com 64 x 64 pxels (para uma magem de 256 x 256 pxels). (a) (b) (c) Fgura 57 (a) Imagem orgnal de bordas, (b) resultado obtdo com o método de Otsu, (c) Método de Pun e (d) Método do Trângulo. (d) Com o objetvo de apresentar os resultados que podem ser obtdos com a aplcação de um método local, neste trabalho está sendo mplementada uma varação do método de Otsu, de forma a trabalhar em regões Método de Otsu modfcado O objetvo ncal da proposta sera para cada pxel da magem calcular o valor de um lmar, obtdo apenas para uma pequena regão ao redor do mesmo.
83 _ 66 Devdo ao grande processamento que sto mplcara, uma nova estratéga fo desenvolvda, e assm, o método determna o valor do lmar utlzando os pxels pertencentes a uma janela 60 x 60, e o valor obtdo é utlzado para todos os pxels localzados na regão central desta janela (20 x 20). A fgura 58 mostra a construção destas regões, e observa-se que na mplementação, algumas regões da borda da magem precsam ser dferencadas, pos não possuem todos os blocos vznhos. Na rotna desenvolvda foram observadas as 9 stuações ndcadas na fgura 58. Stuação 5 60x60 20x20 Stuação 40x40 20x20 Stuação 2 60x40 20x20 Stuação 3 40x40 20x20 Stuação 4 40x60 20x Stuação 6 40x60 20x20 Stuação 7 40x40 Stuação 8 60x40 Stuação 9 40x40 20x20 20x20 20x20 Fgura 58 Formação das regões a serem utlzados no processo de lmarzação local (Otsu modfcado). A fgura 59 mostra a dferença entre os resultados obtdos com a aplcação dos métodos de Otsu e do Método de Otsu Modfcado (proposto). A fgura 59 (d) mostra que algumas lnhas mportantes são removdas da magem orgnal (b) com a utlzação do Método de Otsu (Global), sendo, no entanto, preservadas, conforme mostra (f) com a aplcação do Método de Otsu modfcado, que atua de forma local.
,(b) Imagens")


84 _ 67 (a) (b) (c) (d) (e) (f) Fgura 59 (a),(b) Imagens orgnas, (c),(d) resultados obtdos com a aplcação do Método de Otsu e (e) e (f) Resultados obtdos com o Método de Otsu modfcado (proposto).
85 _ ETAPA DE AFINAMENTO DE BORDAS Após a elmnação dos pxels de borda com pequenas magntudes pela etapa de lmarzação, as bordas precsam passar por uma etapa de afnamento, devendo, após sto, restarem apenas segmentos com uma largura mínma (apenas a largura de um pxel). Além do método de afnamento por supressão não máxma, neste trabalho também está mplementada uma generalzação desta técnca. Por este novo método, não exste a necessdade de dscretzar as dreções dos pxels de bordas, conforme ocorre com o método da supressão não máxma orgnal (em 8 ou 2 dreções), conforme apresentado na seção 2.5. (fgura 20) Supressão não máxma generalzada Conforme apresentado na seção 2.5., o método de afnamento de lnhas por supressão não máxma trabalha com apenas oto dreções, caracterzando uma grande dscretzação dos valores das dreções de bordas. Com o objetvo de nvestgar possíves melhoras que podem ser obtdas dspensando esta dscretzação dos ângulos, está sendo proposto um método onde a rotna de afnamento trabalha com ângulos de qualquer valor, determnando em tempo real quas pxels devem ser nvestgados. Nos casos em que se torna necessára uma reamostragem, para a obtenção dos valores das magntudes dos pontos a serem utlzados na comparação (realzada por meo de uma nterpolação blnear), os pontos que deverão ser utlzados também são dentfcados pela rotna. A fgura 60 mostra o detalhe de uma borda e também a geometra utlzada para determnar automatcamente, a partr do conhecmento da dreção da borda, a localzação dos pontos m e m 2 que devem ter suas magntudes comparadas com a magntude do pxel m (pxel nvestgado). A fgura mostra também as coordenadas destes pontos, que são obtdas por meo das coordenadas do pxel m e da nformação de dreção da bordas, conforme defnem as expressões (79) a (82).
86 _ 69 +s c (a ), j-s s (a ) +s c (a ), j-s s (a ) +s c (a ), j d c m b a m a 2 b 2, j α α 2 m 2, j-s s (a 2 ) c 2 d 2 α +s c (a 2 ), j +s c (a 2 ), j-s s (a 2 ) Fgura 60 Determnação dos pontos a serem verfcados no processo de afnamento. Na fgura os ângulos α e α 2 são dados por: e α α π = + (79) 2 α α π 2 = (80) 2 S s e S c representam o snal dos senos e cosenos destes ângulos, tem-se: e 0 se cos( x) = 0 sc ( x) = se cos( x) > 0 se cos( x) < 0 0 se sen( x) = 0 ss( x) = se sen( x) > 0 se sen( x) < 0 (8) (82) Após a determnação dos pxels a, b, c e d (conforme fgura 60), a magntude na posção do ponto m pode ser determnada por meo de uma nterpolação blnear,
.")
 A grande vantagem deste método é que o mesmo pode ser aplcado em pxels de borda que possuem dreções numa faxa de 0 à 360 graus, enquanto que no método da supressão não máxma, era precso fazer uma")
87 _ 70 conforme apresentado na seção O mesmo ocorre para a determnação da magntude na posção do ponto m 2, a partr das magntudes dos pxels a 2, b 2, c 2 e d 2. A fgura 6 mostra os resultados obtdos com a utlzação do método da supressão não máxma e da supressão não máxma generalzada (proposta). (a) Fgura 6 Resultados obtdos com a aplcação da (a) supressão não máxma e (b) supressão não máxma generalzada (proposta). (b) A grande vantagem deste método é que o mesmo pode ser aplcado em pxels de borda que possuem dreções numa faxa de 0 à 360 graus, enquanto que no método da supressão não máxma, era precso fazer uma dscretzação destes valores em apenas oto ou doze dreções. 3.8 ETAPA DE CONEXÃO Após a etapa de afnamento, os pxels de borda podem ser agrupados, formando os segmentos. Devdo aos problemas que a Transformada de Hough apresenta (necessdade de grandes estruturas, e problemas de falsos pcos), neste trabalho fo mplementado apenas o método de Varredura e Rotulação ( Scan & Label ) (Zhou et al., 989), (Venkasteswar, 994) e (Tommasell, 999) e anda um método proposto, que também faz uma rotulação dos pxels, porém, com a dferença de que, ao
88 _ 7 encontrar um pxel de borda, localza medatamente todos os seus vznhos por um processo de nundação (pode ser utlzada uma vznhança 4 ou 8). Pelo prmero método, é realzada uma varredura na magem da dreta para a esquerda, e de cma para baxo, sendo atrbuído ao prmero pxel de borda encontrado, um rótulo de valor (um). Para este mesmo pxel (pxel atual) são verfcadas as vznhanças que aparecem na fgura 34 (seção 2.6.3). Conforme mostra tal fgura, pxels pertencentes a uma vznhança 8, com a mesma dreção que o pxel atual recebem também o mesmo rótulo que o pxel atual. Caso não exstam pxels na vznhança 8 com a dreção específca, a busca é feta em uma vznhança maor (25). Neste caso, exstndo algum pxel com a mesma dreção que o pxel atual, ele recebe o mesmo rótulo que o pxel atual. Também recebe o mesmo rótulo o pxel que se localza entre estes dos pxels, sendo consderado um pxel de lgação ou ponte. Iníco do segmento Iníco do segmento Fm do segmento Fm do segmento 4 Fgura 62 Os números representam rótulos obtdos, e nota-se que o segmento de rótulos 4 cruza o segmento de rótulos. Uma nformação mportante que precsa ser levada em consderação no desenvolvmento das rotnas seguntes é que devdo ao método de varredura e rotulação trabalhar em uma vznhança 8 e 24, podem aparecer segmentos com algumas quebras, conforme mostra a fgura 62. Portanto, as demas rotnas para os processamentos posterores, que tverem a necessdade de percorrer os pxels de um segmento, precsam então ser projetadas para trabalhar em uma vznhança 24, pos, caso contráro, partndo do pxel de níco não se consegue atngr o pxel fnal.
89 _ Rotulação por nundação Uma nova proposta para a conexão (lnkagem) está sendo apresentada neste trabalho e consste em rotular por nundação (seed-fll), todos os pxels vznhos ao pxel atual (obtdo por varredura) com um mesmo rótulo. Esta parece ser a forma como as pessoas fazem vsualmente a dentfcação das lnhas retas presentes em uma magem, ou seja, dentfcam a reta toda no momento em que se drge a atenção para uma parte da mesma. Dferente do Método de varredura e rotulação (Scan & Label), que va formando as retas a partr de uma sucessão de varreduras nas lnhas da magem. Neste método a varredura é feta no espaço magem, apenas para mpedr que algum pxel presente na magem dexe de ser analsado. Porém, quando um pxel pertencente à uma reta é detectado, todos os pxels pertencentes a mesma são rotulados medatamente (por nundação). Uma grande vantagem deste método é que o mesmo não apresenta o problema mostrado na fgura 64 (seção 3.8.2), que o Método de Varredura e Rotulação apresenta. Este método apresenta bons resultados na rotulação, porém a dentfcação dos pxels ncal e fnal da reta que está sendo rotulada é uma tarefa não resolvda durante o processo de rotulação, uma vez que a nundação não apresenta uma dreção bem defnda de camnhamento, espalhando-se pratcamente aleatoramente em uma vznhança-8. Este problema pode ser resolvdo em uma etapa posteror do processamento, como é o caso do sstema desenvolvdo neste trabalho Determnação dos pxels extremos dos segmentos Um dos resultados ndesejáves deste método está em não haver uma forma robusta para estabelecer os pxels níco e fm de cada segmento. Uma possível forma de auxlar esta tarefa no momento de construção dos segmentos, é utlzar meddas de dstânca para verfcar se o pxel atual deve ser mesmo classfcado como fnal ou ncal da reta (na estrutura). A fgura 6 mostra o esquema utlzado para resolver este problema.
90 _ 73 Iníco da lnha d 0 Pxel a ser conectado Fm da lnha d 2 d Fgura 63 Esquema utlzado para evtar problemas na defnção dos pxels extremos da lnha durante o Método de Varredura e rotulação ou Inundação (proposto). Pelo esquema sugerdo, d 0 é a dstânca entre o pxel a ser rotulado (atual) e o pxel níco da reta, d é a dstânca entre o pxel a ser rotulado (atual) e o pxel fnal da reta, d 2 é a dstânca entre os pxels níco e fm da reta (comprmento da reta). Caso d 0 > d 2, então o pxel é rotulado e a estrutura da lnha recebe suas coordenadas como o fm da lnha. Caso d > d 2 o pxel atual é rotulado e a estrutura da lnha recebe suas coordenadas como o níco da lnha. Se d 2 > d e d 2 > d 0, então o pxel atual é rotulado, porém os pxels níco e fm da reta são mantdos. Um segundo problema que ocorre no método de varredura e rotulação, pode ser vsualzado na fgura 64. Percebe-se que, para lnhas com um nclnação entre 0 o e 30 o, apesar dos pxels consttuntes da mesma terem sdo detectados com uma mesma dreção (na etapa de detecção), e estarem devdamente conectados em uma vznhança 8, anda assm o resultado da conexão resulta em um conjunto de pequenas retas, quando a lnha devera ser únca. Todos os pxels com a mesma dreção (8) Rótulos dferentes para os pxels (2,3,4) (a) (b) Fgura 64 (a) Dreção dos pxels de uma dada reta e (b) resultado da conexão utlzando o método da varredura e rotulação (rótulos dferentes para pxels com uma mesma dreção).
91 _ 74 Conforme mostra a fgura 64 (a), todos os pxels da borda apresentam a mesma dreção, porém, conforme mostra-se na mesma fgura em (b) verfca-se que eles não recebem o mesmo rótulo, provocando uma fragmentação da reta. A fgura 65 mostra em detalhe dos pxels, seus rótulos e a causa do problema. a varredura 2 a varredura 3 a varredura Quando va rotular este pxel, não enxerga os pxels rotulados com 0, e assm atrbu um novo rótulo () ao mesmo Fgura 65 Detalhe do problema que ocorre no método apresentado (Varredura e Rotulação). Uma sugestão que pode corrgr o problema é sempre verfcar se um pxel está sob a ação de dos rótulos vznhos, e neste caso, herdar o menor deles (anteror na fgura acma, o rótulo 0), fazendo uma propagação em todos os demas pxels já rotulados com o rótulo atual (na fgura 65, o rótulo ), fazendo com que os mesmos recebam também o rótulo anteror (na fgura 65, o rótulo 0). Desta forma tem-se o procedmento apresentado na fgura 66. a varredura a varredura a varredura 2 a varredura? a varredura 2 a varredura Fgura 66 Sugestão para a correção do problema no método Scan & Label. Este esquema tem apresentado bons resultados em dversas stuações, mas a sua utlzação não é mprescndível, pos, a etapa de reconexão de segmentos colneares (seção 3.8.3) também pode resolver o problema.
.")
 (b) Fgura 67 Localzação dos pxels extremos (a) antes e (b) depos da correção.")
92 _ 75 Mesmo utlzando o esquema apresentado na fgura 63, alguns segmentos contnuam apresentando resultados nsatsfatóros na defnção de seus pxels extremos. A fgura 67 mostra o detalhe de um segmento, e dos seus pxels extremos obtdos na etapa de rotulação mplementada (mesmo usando o esquema exbdo na fgura 63). Nota-se em (a) que os pxels níco e fm não se encontram realmente nos extremos do segmento, pos, para tal segmento o resultado esperado sera aquele exbdo em (b). (a) (b) Fgura 67 Localzação dos pxels extremos (a) antes e (b) depos da correção. A técnca proposta para a rotulação (nundação) das lnhas da forma como está mplementada, não retorna na estrutura de lnhas, os pxels ncal e fnal da reta, e assm, esta nformação precsa ser obtda em uma etapa adconal. A etapa mplementada parte do pxel ncal (atual) do segmento e, por nundação, verfca quas são os pxels extremos (pela esquerda, dreta, por cma e por baxo). Uma possível forma de se avalar a necessdade de aplcar a rotna para a determnação dos pxels extremos das lnhas pode ser dada pela segunte condção: necessdade se L < N 2 (83) onde L é o comprmento do segmento e N é o número de pxels que o mesmo possu. Em (83) observa-se que fca evdencada a necessdade quando, para um grande número de pxels tem-se um pequeno comprmento de segmento.

93 _ 76 O algortmo mplementado no sstema que obtém os pxels extremos em x e também em y com boa efcênca é também apoada na condção de dstânca entre pxels, sendo então defndos os quatro pxels extremos em x e y, conforme mostra a fgura 68. Fgura 68 Detalhe de um segmento onde os extremos precsam ser verfcados, para se defnr os pxels extremos da reta Em seguda o algortmo determna os dos pxels mas dstantes ente os quatro possíves (, 2, 3 e 4 respectvamente mínmo em y, mínmo em x, máxmo em x e máxmo em y). Neste caso, especfcamente, serão escolhdos os pxels e 4 mínmo e máxmo em y respectvamente. Na mesma fgura, d, d 2, d 3, d 4, d 5 e d 6 são respectvamente, as dstâncas entre os pxels -2, -3, -4, 2-3, 2-4 e 3-4. Este método tem resolvdo de forma adequada a determnação dos pxels extremos dos segmentos, de qualquer dreção. Como a rotna mplementada precsa percorrer todos os pxels sob um mesmo rótulo, esta etapa pode também ser utlzada para se fazer uma recontagem do número de pxels que possuem o mesmo rótulo, nformação mportante a ser mantda na
94 _ 77 estrutura de lnhas. A recontagem é mportante pos permte manter atualzado o número de pxels que cada segmento possu, e que por sua vez é utlzado na etapa posteror (ajustamento) Conexão dos segmentos colneares No processo de conexão de segmentos colneares, descrto na seção , verfca-se que, em mutas stuações, pequenos segmentos com uma nclnação aproxmadamente vertcal (por exemplo 60 graus), são conectados com segmentos aproxmadamente horzontas (por exemplo 30 graus), e esta operação mascara a verdadera dreção do segmento formado (no caso aproxmadamente horzontal e vertcal ao mesmo tempo). Os testes realzados na prátca mostram que este algortmo não atende tas stuações, e assm uma nova metodologa está sendo utlzada. No sstema desenvolvdo fo mplementada a rotna que conecta os segmentos colneares, conforme apresentado na seção (máscaras de dreção - fgura 36). Na mplementação da rotna foram defndas as prordades apresentadas na fgura 69 para a conexão dos segmentos. Nesta fgura, o pxel O é o pxel fnal ou ncal do segmento que poderá ser conectado a algum outro nas proxmdades. O pxel A é o local onde será analsado a exstênca de algum outro segmento com um ângulo próxmo (dferença menor ou gual a trnta graus) ao do prmero segmento. No caso de ocorrer a conexão (o que é possível se for atendda a condção apresentada na seção (fgura 37), os pxels P são então anexados ao novo segmento, como pxels ponte, recebendo também a dreção dos demas pxels, e a magntude é dada pela méda das magntudes do pxel O e A. Conforme também mostra a fgura 69, a seqüênca de operações realzadas, procura ncalmente em uma vznhança mas próxma, e em seguda, caso não encontre segmentos nas proxmdades, se afasta um pouco, até uma dstânca máxma de três pxels. Este procedmento permte a conexão de segmentos separados no máxmo por três pxels.




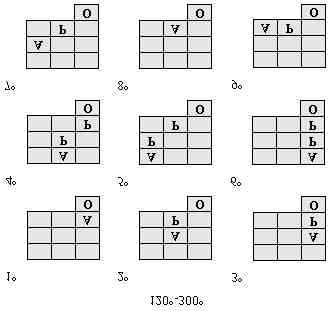
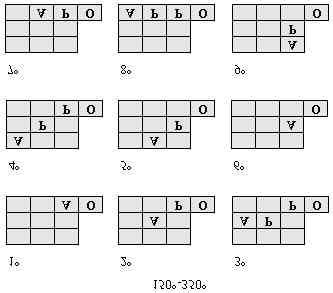
95 _ 78 Fgura 69 Regões utlzadas na rotna de conexão de segmentos colneares.
96 _ 79 segmentos. A fgura 70 mostra como estas máscaras são utlzadas com os respectvos Fgura 70 Relaconamento entre os segmentos na rotna de conexão de segmentos colneares. Conforme apresentado anterormente, a conexão deve ser verfcada para segmentos de mesma dreção, e também segmentos com dreção próxma. Um estudo dos segmentos apresentados na fgura 69 mostra que o segmento de dreção 0-80 consegue detectar em suas extremdades segmentos de , 0-80 e (sempre a sua dreta - caso exstam). O segmento de consegue detectar nas suas extremdades segmentos de 0-80, e (sempre a sua dreta - caso exstam). Da mesma forma, um segmento de consegue detectar nas suas extremdades segmentos de 30-20, e (sempre a sua dreta - caso exstam). Um segmento de consegue detectar nas suas extremdades segmentos de , e , (sempre na sua parte superor - caso exstam). Um segmento de consegue detectar nas suas extremdades segmentos de , e , (à esquerda e acma - caso exstam), e fnalmente um segmento de consegue detectar nas suas extremdades segmentos de 0-80, e (à esquerda e acma - caso exstam). Entretanto, um segmento de não consegue detectar na sua extremdade mas a dreta segmentos de 0-80, apesar de ser detectado pelos segmentos de e (caso exstam). Uma possível solução para esta stuação é utlzar especfcamente para os segmentos com dreção 0-80, a máscara que aparece na fgura 7.
 mostra a ocorrênca deste problema, e a fgura 72(b) mostra o resultado obtdo com a correção da máscara para segmentos com dreção 0-80 (fgura 7).")
97 _ 80 X X X X X X X X X O X X X X X X X X X Fgura 7 Máscara para a conexão de segmentos colneares. A fgura 72(a) mostra a ocorrênca deste problema, e a fgura 72(b) mostra o resultado obtdo com a correção da máscara para segmentos com dreção 0-80 (fgura 7). (a) (b) Fgura 72 (a) Város segmentos colneares não conectados e (b) após a utlzação da máscara da fgura 7. Após a conexão dos segmentos colneares, um segmento pode ter sdo obtdo pela unão de dversos segmentos menores com dferentes dreções (dreções próxmas); assm, após esta etapa, a dreção precsa ser novamente calculada, ou não se tem a nformação da verdadera localzação dos pxels níco e fm de cada segmento.
98 _ 8 Devdo ao problema de alasng já menconado, torna-se necessáro fazer um relaxamento no momento de verfcar se dos segmentos são colneares. Na mplementação foram consderados segmentos colneares aqueles que possuem dreções próxmas (dferença máxma de 30 ), sendo a confrmação de colneardade obtda pelo crtéro apresentado na fgura 37 (seção ). Após a conexão de dos segmentos colneares os pxels níco e fm do novo segmento precsam ser defndos. As dferentes formas como os pxels níco e fm de cada segmento envolvdo na unão pode aparecer tem tornado complcada a tarefa de defnr os extremos do novo segmento. Uma solução que tem se mostrado efcente é, após a troca dos rótulos de um segmento pelos rótulos do outro segmento (todos os pxels dos dos segmentos passam a ter o mesmo rótulo), executa-se a rotna de determnação dos pxels extremos das lnhas já abordada. Fnalmente, no processo de conexão de segmentos pode ocorrer que um segmento possua uma dreção, e o outro possua uma dreção dferente. Entretanto, o novo segmento obtdo pela unão dos dos deve receber uma dreção, anda a ser defnda Correção das dreções dos segmentos Após a determnação de todos os pxels que pertencem temporaramente a um dado segmento (todos os pxels possuem o mesmo rótulo), verfca-se que alguns segmentos são consttuídos por pxels com dreções dferentes, (não exstndo mas a nformação correta da verdadera dreção do segmento todo). Nota-se, anda, que, apesar de alguns segmentos possuírem pxels com dreção 0, 30 e até 60 graus, o conjunto todo (segmento formado) pode se mostrar claramente com uma dreção próxma de 30 graus. Neste caso é possível adotar para todos os pxels do segmento, a dreção global do segmento, que pode ser defnda por meo dos pxels extremos defndos na etapa anteror.
99 _ 82 (a) (b) (c) (d) Fgura 73 (a) Imagem de dreções obtda pela etapa de detecção de bordas, (b) magem de dreções após a correção sugerda, (c) detalhe do segmento destacado em (a) e (d) detalhe do segmento destacado em (b)
100 _ 83 A rotna toma apenas os pxels níco e fm do segmento, e assm determna o ângulo aproxmado do segmento (dreção aproxmada). O ângulo do segmento é dado por 84). y arctan x α = y arctan x f f y se x f > x x y x f f se x > x f (84) Em (84) não está sendo mas levado em consderação a dreção da borda (consderando a dreção do gradente - borda), mas apenas a dreção do segmento, obtda conforme descrto anterormente, exclusvamente através da localzação dos pxels extremos deste. A nformação de dreção obtda nesta etapa é mportante pos defne a parametrzação mas adequada a ser utlzada no processo de ajustamento de retas (modelo y=ax+b para retas horzontas ou x=a*y+b* para retas vertcas). Isto é mportante para prevenr o problema de tentar ajustar uma reta vertcal com o modelo y=ax+b, o que resultara em a=±, ou por outro lado, tentar ajustar uma reta horzontal com o modelo x=a*y+b*. Após a determnação dos pxels que pertencem a cada segmento de reta (todos os pxels possuem um mesmo rótulo), pode ser realzado o ajustamento das retas sobre eles. Neste trabalho, está mplementada uma rotna de ajustamento, que trabalha apenas com lnhas retas (regressão lnear). Durante o processamento também é realzada uma totalzação dos valores dos resíduos, e caso seja obtdo um número acma de um valor prevamente estabelecdo, um processo de quebra do segmento (splttng) é executado. A fgura 74 mostra um exemplo obtdo nos expermentos, onde se verfca tal stuação.
101 _ 84 Iníco do segmento 4 Iníco do segmento Fm do segmento Fm do segmento 4 Fgura 74 Ajustamento de retas sobre dos segmentos ( e 4). Neste caso, o valor do resíduo está acma do lmte prevamente estabelecdo, e portanto deve ser ncado o processo de dvsão do segmento (splttng), conforme mostra a fgura 75, segmento número 4. No caso da stuação apresentada nesta fgura, o método de quebra mplementado localza a maor dstânca entre os pxels do segmento 4 e a reta que lga os extremos do segmento. Iníco do segmento 4 Iníco do segmento Fm do segmento Ponto de quebra Fm do segmento 4 Fgura 75 Confguração dos segmentos e 4, e a dentfcação dos pxels de quebra no processo de ajustamento.
102 _ 85 O pxel destacado na fgura 75, e ndcado como pxel de quebra, deve se tornar então o pxel fnal do segmento que se nca no pxel de níco do segmento 4. Em seguda, todos os pxels a partr do pxel de níco do segmento 4 devem ser substtuídos por um novo valor de rótulo (um rótulo anda não utlzado - no caso 9), consttundo-se assm um novo segmento de rótulo 9, conforme mostra a fgura 76. Iníco do segmento Fm do segmento Ponto de quebra Iníco do segmento Fm do segmento Fgura 76 Confguração dos segmentos após a quebra do segmento de rótulo 4 em dos segmentos (rótulos 4 e 9). Na rotna mplementada, o pxel níco do segmento novo (rótulo 9) concde com o níco do segmento de rótulo 4, enquanto que o fm do segmento novo concde com o pxel de quebra do segmento antgo (rótulo 4). Como o pxel fm do segmento 4 não é alterado, o novo pxel de níco do mesmo pode ser determnado pela rotna de determnação de pxels extremos já apresentada anterormente (que também atua por um processo de nundação persegução de pxels), sendo ncalzada neste pxel (pxel níco do segmento 4). Neste processo observa-se que, para que a rotna (baseada em um processo de nundação) funcone adequadamente, consegundo percorrer o segmento do níco até o
103 _ 86 fm, e transpondo os cruzamentos (segmento na fgura 74), é precso que seja verfcada uma vznhança 24 (a rotna de nundação de ser capaz de realzar saltos de um pxel, para contnuar a percorrer o segmento com quebras). Por outro lado, para que o pxel de quebra não seja ultrapassado, apenas a vznhança 8 deve ser utlzada. Com o objetvo de resolver esta stuação o sstema utlza algortmo apresentado na fgura 77. quebra_proxma = Quebra_Na_Vznhanca(,j,); // verfca se quebra está na vznhança 8 se (quebra_proxma) // se estver troca_local_rotulos(,j,); // troca os rótulos na vznhança 8 senão // se a quebra não está na vznhança 8 { possvel_camnhar = Possvel_deslocar_vznhanca(,j,); // verfca se consegue camnhar na vznhança 8 se (possvel_camnhar) // se for trocar_rotulo_vznhanca_(,j); // camnha na vznhança 8 (trocando rótulos) senão // se não é possível camnhar na vznhança 8 { quebra_proxma = Quebra_Na_Vznhanca(,j,2); // verfca se a quebra está na vznhança 24 se (quebra_proxma) // se estver troca_local_rotulos(,j,2); // troca os rótulos na vznhança 24 senão // se a quebra não está na vznhança 24 trocar_rotulo_vznhanca_2(,j); // camnha na vznhança 24 (trocando rótulos) } Fgura 77 Algortmo utlzado para fazer a troca de rótulos no processo de quebra de segmentos. Conforme se observa na rotna, ncalmente é verfcado se o pxel de quebra está nas proxmdades (vznhança 8) e, caso sto ocorra, apenas os pxels dentro desta vznhança terão seu rótulos verfcados e trocados pelo novo valor, pela rotna troca_local_rotulos(,j,). Caso o pxel de quebra não esteja nas proxmdades (vznhança 8), a rotna verfca se é possível camnhar utlzando uma vznhança 8 (sto será possível se não houver um pxel de nterrupção no segmento). Neste caso, percorre o segmento utlzando uma vznhança 8. Não havendo a possbldade de camnhar na vznhança 8 (devdo a alguma nterrupção do segmento devdo a uma nterseção com um outro segmento) a rotna então verfca se o pxel de quebra está na vznhança 24. Neste caso, executa a rotna troca_local_rotulos(,j,2), que fnalza o processo verfcando uma possível troca apenas nos pxels da vznhança 24. Caso a quebra não esteja anda na vznhança 24, é verfcada a possbldade de se camnhar em uma vznhança 24, e desta forma, é possível transpor o pxel de nterrupção e contnuar o processo até que o pxel de quebra seja atngdo.
104 _ 87 As rotnas trocar_rotulo_vznhanca_2(,j) e trocar_rotulo_vznhanca_(,j) também são recursvas e partcpam do processo, conforme descrto. Após a quebra do segmento em dos, os mesmos também precsam passar pelo processo de ajustamento, e caso ocorra dos resíduos contnuarem acma de um lmte acetável, os segmentos precsam ser quebrados novamente. A fgura 78 mostra o algortmo utlzado para resolver esta etapa do processamento. se lnha_horzontal(); { ajusta_horzontal(); // se o segmento é aproxmadamente horzontal // ajusta o segmento usando a parametrzação y=ax+b resduos onde N : Número de Q = // Defne um fator de qualdade do ajustamento N pontos; do segmento se Q > lmar Quebre_o_segmento(); } senão { ajusta_vertcal(); // Quebra o segmento em dos ( e novo) // se o segmento não é aproxmadamente horzontal // ajusta o segmento usando a parametrzação x=ay+b resduos onde N : Número de Q = // Defne um fator de qualdade do ajustamento N pontos; do segmento se Q > lmar Quebre_o_segmento(); } repta para os segmentos que foram quebrados(); // Quebra o segmento em dos ( e novo) Fgura 78 Algortmo utlzado para medr a qualdade do ajustamento e decdr as stuações onde a quebra (splttng) é necessára. O valor de Q utlzado no algortmo fo obtdo emprcamente, sendo gual a.0 (um), podendo anda ser modfcado, de acordo com os resultados obtdos. O valor de N (número de pxels no segmento) utlzado no denomnador é justfcado por ser mas nteressante manter os segmentos com um grande número de pxels (segmentos comprdos). Assm, um mesmo resíduo resultará em um valor de Q maor que aquele que sera obtdo se o segmento fosse maor.
105 88 CAPITULO 4 RESULTADOS EXPERIMENTAIS 4. GERAÇÃO DE UMA IMAGEM PADRÃO Uma magem padrão é gerada para testes, a partr de uma magem crada em tempo de execução pelo própro sstema (magem sntétca - fgura 79). Este procedmento fo adotado pela vantagem de serem conhecdos os valores corretos dos vértces dos polígonos, e consequentemente os parâmetros a e b de cada um dos segmentos que delmtam os polígonos formados (os números dentro dos círculos são os números dos segmentos - lnhas de borda) Fgura 79 Imagem gerada sntetcamente.
106 89 O seu formato fo escolhdo de modo a conter bordas com váras dreções e cantos com ângulos retos, agudos e obtusos, de forma a verfcar o comportamento dos város algortmos mplementados em dversas stuações. A tabela 3 mostra as coordenadas e os parâmetros dos vnte segmentos que formam os três polígonos que aparecem na magem padrão. Tas valores foram utlzados como referênca, para a análse dos resultados obtdos nos expermentos. Tabela 2 Coordenadas e parâmetros dos segmentos que formam os três polígonos da magem padrão. Segmento Vértce Vértce 2 Tpo a b x y x Y (parametrzação) Horz (y=ax+b) 0, , Horz (y=ax+b) -0, , Horz (y=ax+b) -0, , Vert(x=ay+b) 0, , Horz (y=ax+b) 0, , Vert(x=ay+b) -0, , Horz (y=ax+b) -0, , Vert(x=ay+b) 0, , Vert(x=ay+b) -0, , Horz (y=ax+b) 0, , Horz (y=ax+b) -0, , Horz (y=ax+b) -0, , Vert(x=ay+b) 0, , Horz (y=ax+b) 0, , Horz (y=ax+b) -0, , Vert(x=ay+b) 0, , Vert(x=ay+b) -0, , Vert(x=ay+b) 0, , Vert(x=ay+b) -0, , Vert(x=ay+b) 0, , Antes de ser utlzada nos expermentos, a magem sntétca que é vsta na fgura 79 passou por um processo de degradação, sendo utlzado o modelo apresentado em Gonzalez (993), que pode ser vsto na fgura 80. Neste modelo, a magem de entrada f(x,y) (fgura 79) sofre um espalhamento (borramento), defndo na função H, e em seguda é acrescentado 0% de ruído aleatóro η(x,y).

107 90 η(x,y) f(x,y) H g(x,y) Fgura 80 Modelo de degradação utlzado para a obtenção da magem padrão. Após a aplcação deste processo de degradação sobre a magem apresentada na fgura 79, obtém-se a magem apresentada na fgura 8. Fgura 8 Imagem utlzada na parte expermental deste trabalho, obtda pelo processo de degradação. 4.2 EXPERIMENTOS COM A IMAGEM PADRÃO Após apresentados os resultados obtdos com váras combnações de algortmos mplementados, usando a magem padrão, são também apresentados os valores numércos dos parâmetros a e b (ou a* e b*) e anda a magem resultante (vetores obtdos). Os valores dos parâmetros podem ser comparados com os valores verdadero, conhecdos a pror. As fguras 82 a 9 resumem os expermentos realzados com a magem padrão. Nestas fguras, (a) apresentam as seqüêncas de algortmos utlzadas nas etapas do
108 9 processo; (b) os resultados numércos obtdos para os parâmetros a e b (ou a* e b*); (c) mostram as magens dos vetores obtdos. Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Méda 3x3 Nevata e Babu Otsu Supressão não Máxma Varredura e Rotulação M.M.Q. (a) a b erro a erro b -0,0834 2, ,0834, , , ,0043 0, , ,799 0, , , , ,0535 2, , , , , , , ,0028-0, , ,3067 0, , , , , , , , , , , , , , , ,4553 0, , , , , , ,0283 9,923-0,0283, , ,3242 0,0032 -, , , ,0086-0, , ,9947 0, , , , ,0045 -, , , ,026, , , ,0002 0, , , ,055,39070 (b) (c) Fgura 82 Expermento. Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Méda 3x3 Nevata e Babu Otsu Local Supressão não Máxma Varredura e Rotulação M.M.Q. (a) a b erro a erro b -0,0834 2, ,0834, , , ,0043 0, , ,799 0, , , , ,0535 2, , , , , , , ,0028-0, , ,3067 0, , , , , , , , , , , , , , , ,4553 0, , , , , , ,0283 9,923-0,0283, , ,3242 0,0032 -, , , ,0086-0, , ,9947 0, , , , ,0045 -, , , ,026, , , ,0002 0, , , ,055,39070 (b) Fgura 83 Expermento 2. (c)
 a b erro a erro b 0,00000 2,00000 0,00000,00000 2-0,3575 28,630 0,007 0,0458 3-0,36820 247,96042 0,00680-0,78958 4-0,0056 2,54706-0,0056,54706 5 0,00459 08,5284 0,00459 -,4759 6-0,59839 85,233")
109 92 Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Sobel Otsu Supressão não Máxma Varredura e Rotulação M.M.Q. (a) a b erro a erro b 0, , ,00000, , ,630 0,007 0, , , , , ,0056 2, ,0056, , ,5284 0, , , ,233 0,006-0, , , , , , ,799-0,0485 3, , , , , , , , , ,792 03,396-0,0255, , ,9679 0, , , , , , , ,3902 0, , , ,2830 0,0355 -, ,0679 8,2920 0,0679 -, , , , , , , ,0009 0, , ,5239 0, , , , ,0028 0,86342 (b) (c) Fgura 84 Expermento 3. Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Sobel Trângulo Supressão não Máxma Varredura e Rotulação M.M.Q. (a) a b erro a erro b 0, , ,00000, , ,630 0,007 0, , , , , ,0056 2, ,0056, , ,5284 0, , , ,233 0,006-0, , , , , , ,799-0,0485 3, , , , , , , , , ,792 03,396-0,0255, , ,9679 0, , , , , , , ,3902 0, , , ,2830 0,0355 -, ,0679 8,2920 0,0679 -, , , , , , , ,0009 0, , ,5239 0, , , , ,0028 0,86342 (b) (c) Fgura 85 Expermento 4.
110 93 Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Nevata e Babu Otsu Supressão não Máxma Varredura e Rotulação M.M.Q. (a) a b erro a erro b 0, , , , , , , , , , ,0330 -, , ,052-0,0232 4, , ,653 0, , , , ,0068-0, , , , , ,064 43, ,064 3, , , , , , ,75-0,00634,75-0, , ,002 0, , , , , , ,2046-0,00684, , , , , , ,9270 0, , ,0077 9,339 0,0077-0, , , ,0048-0, , , ,00906, , , , , , ,7533-0, ,7533 (b) Fgura 86 Expermento 5. (c) Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Nevata e Babu Otsu Local Supressão não Máxma Varredura e Rotulação M.M.Q. (a) a b erro a erro b 0, , , , , , , , , , ,0330 -, , ,052-0,0232 4, , ,653 0, , , , ,0068-0, , , , , ,064 43, ,064 3, , , , , , ,75-0,00634,75-0, , ,002 0, , , , , , ,2046-0,00684, , , , , , ,9270 0, , ,0077 9,339 0,0077-0, , , ,0048-0, , , ,00906, , , , , , ,7533-0, ,7533 (b) (c) Fgura 87 Expermento 6.
 a b erro a erro b 0,00000 2,00000 0,00000,00000 2-0,384 28,8890 0,00445 0,3767 3-0,36893 248,029 0,00607-0,64709 4 0,0064 20,75464 0,0064 0,75464 5 0,0003 09,9573 0,0003-0,08427 6-0,5995")
111 94 Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Análse Sobel Otsu Supressão não Máxma Varredura e Rotulação M.M.Q. Varânca (a) a b erro a erro b 0, , ,00000, ,384 28,8890 0, , , ,029 0, , , , ,0064 0, , ,9573 0,0003-0, , , , , , ,4879-0, , , ,373-0, , , , , , ,0657 9, ,0657, , ,8225-0, , , , , , , ,098 0,0802 0, , ,0602 0,0030-0, , ,3693 0,0055-0, , , , , , , , , , ,0355 0, , , ,6540 0, , , , , ,25606 (b) Fgura 88 Expermento 7. (c) Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Análse Sobel Pun Supressão não Máxma Varredura e Rotulação M.M.Q. Varânca (a) a b erro a erro b 0, , ,00000, ,384 28,8890 0, , , ,029 0, , , , ,0064 0, , ,9573 0,0003-0, , , , , , ,4879-0, , , ,373-0, , , , , , ,0657 9, ,0657, , ,8225-0, , , , , , , ,098 0,0802 0, , ,0602 0,0030-0, , ,3693 0,0055-0, , , , , , , , , , ,0355 0, , , ,6540 0, , , , , ,25606 (b) Fgura 89 Expermento 8. (c)
112 95 Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Análse Nevata e Babu Otsu Supressão não Máxma Varredura e Rotulação M.M.Q. Varânca (a) a b erro a erro b 0, , ,00000, , , , , , ,86 0,0246 -, , ,6742-0,0208 3, , , , , , ,2908 0,0038-0, , , , , , , ,0704 3, , ,2899-0,0002-0, , ,484-0,00689,484-0,704 02, , , , , , , , ,6529-0,02254, , ,2552 0, , , ,7027 0, , , , , , , ,8947-0, , , , , , , ,6772-0, , , , ,0039 0,02795 (b) Fgura 90 Expermento 9. (c) Suavzação Detecção Lmarzação Afnamento Conexão Ajustamento Medana Análse Nevata e Babu Pun Supressão não Máxma Varredura e Rotulação M.M.Q. Varânca (a) a b erro a erro b 0, , ,00000, , , , , , ,86 0,0246 -, , ,6742-0,0208 3, , , , , , ,2908 0,0038-0, , , , , , , ,0704 3, , ,426-0, , , ,484-0,00689,484-0,704 02, , , , , , , , ,6529-0,02254, , ,2552 0, , , ,7027 0, , , , , , , ,8947-0, , , , , , , ,6772-0, , , , ,0039 0,02795 (b) (c) Fgura 9 Expermento 0.
113 96 A tabela 4 apresenta o E.M.Q. (erro médo quadrátco) e o E.M. (erro médo) dos erros verdaderos, obtdos pela dferença entre os valores estmados e valores conhecdos na geração de magens. O EMQ é calculado pela expressão (85) e o erro médo pela (86). v ε 2 EMQ = (85) n EM ε v = n (86) onde n é o número de retas. Tabela 3 Tabela de erros obtdos nos resultados dos expermentos. experment o E.M.Q. E.M. a b a b 0,02352, ,00872, ,02352, ,00872, ,03057, ,008643, ,03057, ,008643, ,008350, ,006028, ,008350, ,006028, ,008387, ,0054 0, ,008387,0905 0,0054 0, ,008973, , , ,008976,350 0, , Pode se verfcar que os melhores resultados estão relaconados com a utlzação do detector de Nevata e Babu na etapa de detecção de bordas.
114 EXPERIMENTOS COM IMAGENS REAIS As fguras 92 a 0 apresentam os resultados obtdos com a aplcação das mesmas seqüêncas de etapas utlzadas nos expermentos com a magem padrão, quando aplcadas sobre um detalhe de uma magem aérea real. Imagem orgnal Suavzação Fltro da Méda 3x3 Detecção de Bordas Nevata e Babu Lmarzação Otsu Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 92 Expermento (magem aérea).
115 98 Imagem orgnal Suavzação Fltro da Méda 3x3 Detecção de Bordas Nevata e Babu Lmarzação Otsu Local Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 93 Expermento 2 (magem aérea).
.")
116 99 Imagem orgnal Suavzação Fltro da Medana Detecção de Bordas Operador de Sobel Lmarzação Otsu Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 94 Expermento 3 (magem aérea).

117 00 Imagem orgnal Suavzação Fltro da Medana Detecção de Bordas Operador de Sobel Lmarzação Trângulo Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 95 Expermento 4 (magem aérea).
118 0 Imagem orgnal Suavzação Fltro da Medana Detecção de Bordas Nevata e Babu Lmarzação Otsu Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 96 Expermento 5 (magem aérea).
119 02 Imagem orgnal Suavzação Fltro da Medana Detecção de Bordas Nevata e Babu Lmarzação Otsu Local Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 97 Expermento 6 (magem aérea).
120 03 Imagem orgnal Suavzação Fltro da Medana Varânca Mínma Detecção de Bordas Operador de Sobel Lmarzação Otsu Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 98 Expermento 7 (magem aérea).

.")
121 04 Imagem orgnal Suavzação Medana Varânca Mínma Detecção de Bordas Operador de Sobel Lmarzação Pun Afnamento Supressão não Máxma Conexão Varredura e Rotulação Após a conexão dos segmentos colneares Fgura 99 Expermento 8 (magem aérea). Não fo possível fazer o ajustamento.
122 05 O problema verfcado no expermento 8 ocorreu porque o detector de Sobel encontrou mutos detalhes na magem, e a etapa de lmarzação (Método de Pun) não conseguu elmnar o excesso de nformação. Isto gerou um número muto elevado de vetores na magem (mas de 6000 vetores). A etapa de conexão dos segmentos colneares dmnuu este valor, mas a etapa de ajustamento não consegue chegar ao fm (problemas com recursvdade). O mesmo problema não ocorreu no expermento número 7, que também utlzou o operador de Sobel na etapa de detecção de bordas, porque a etapa de lmarzação (Método de Otsu) fo capaz de elmnar o excesso de nformação. O Método de Pun não se mostrou muto efcente para o trabalho com magens de bordas de magens aéreas (magens reas), porém, fo utlzado neste expermento com uma magem real, para repetr na íntegra o mesmo expermento realzado com a magem padrão. Naquele expermento o Método de Otsu Local não pode ser utlzado, devdo a ocorrênca de regões totalmente preenchdas com um únco tom de cnza (ocasão em que os métodos de lmarzação não funconam), o que dfclmente ocorre com magens reas. Por sto, os expermentos 8 e 0 foram repetdos, sendo aplcado o Método de Otsu Modfcado (local) na etapa de lmarzação.
123 06 Imagem orgnal Suavzação Fltro da Medana Varânca Mínma Detecção de Bordas Nevata e Babu Lmarzação Otsu Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 00 Expermento 9 (magem aérea).
.")
124 07 Imagem orgnal Suavzação Fltro da Medana Varânca Mínma Detecção de Bordas Nevata e Babu Lmarzação Pun Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 0 Expermento 0 (magem aérea).
125 08 Imagem orgnal Suavzação Fltro da Medana Varânca Mínma Detecção de Bordas Operador de Sobel Lmarzação Otsu Local Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 02 Repetção do expermento 8 (magem aérea), com o Método de Otsu Modfcado (Local) na etapa de lmarzação.
, com o Método de Otsu Modfcado (Local) na etapa de")
126 09 Imagem orgnal Suavzação Fltro da Medana Varânca Mínma Detecção de Bordas Nevata e Babu Lmarzação Otsu Local Afnamento Supressão não Máxma Conexão Varredura e Rotulação Fgura 03 Repetção do expermento 0 (magem aérea), com o Método de Otsu Modfcado (Local) na etapa de lmarzação.
CAPÍTULO VI Introdução ao Método de Elementos Finitos (MEF)
") PMR 40 - Mecânca Computaconal CAPÍTULO VI Introdução ao Método de Elementos Fntos (MEF). Formulação Teórca - MEF em uma dmensão Consderemos a equação abao que representa a dstrbução de temperatura na barra
PMR 40 - Mecânca Computaconal CAPÍTULO VI Introdução ao Método de Elementos Fntos (MEF). Formulação Teórca - MEF em uma dmensão Consderemos a equação abao que representa a dstrbução de temperatura na barra
Ministério da Educação. Instituto Nacional de Estudos e Pesquisas Educacionais Anísio Teixeira. Cálculo do Conceito Preliminar de Cursos de Graduação
 Mnstéro da Educação Insttuto Naconal de Estudos e Pesqusas Educaconas Aníso Texera Cálculo do Conceto Prelmnar de Cursos de Graduação Nota Técnca Nesta nota técnca são descrtos os procedmentos utlzados
Mnstéro da Educação Insttuto Naconal de Estudos e Pesqusas Educaconas Aníso Texera Cálculo do Conceto Prelmnar de Cursos de Graduação Nota Técnca Nesta nota técnca são descrtos os procedmentos utlzados
Introdução e Organização de Dados Estatísticos
 II INTRODUÇÃO E ORGANIZAÇÃO DE DADOS ESTATÍSTICOS 2.1 Defnção de Estatístca Uma coleção de métodos para planejar expermentos, obter dados e organzá-los, resum-los, analsá-los, nterpretá-los e deles extrar
II INTRODUÇÃO E ORGANIZAÇÃO DE DADOS ESTATÍSTICOS 2.1 Defnção de Estatístca Uma coleção de métodos para planejar expermentos, obter dados e organzá-los, resum-los, analsá-los, nterpretá-los e deles extrar
ANÁLISE MATRICIAL DE ESTRUTURAS DE BARRAS PELO MÉTODO DE RIGIDEZ
 ANÁISE MATRICIA DE ESTRUTURAS DE BARRAS PEO MÉTODO DE RIGIDEZ A análse matrcal de estruturas pelo método de rgdez compreende o estudo de cnco modelos estruturas báscos: trelça plana, trelça espacal, pórtco
ANÁISE MATRICIA DE ESTRUTURAS DE BARRAS PEO MÉTODO DE RIGIDEZ A análse matrcal de estruturas pelo método de rgdez compreende o estudo de cnco modelos estruturas báscos: trelça plana, trelça espacal, pórtco
NOTA II TABELAS E GRÁFICOS
 Depto de Físca/UFMG Laboratóro de Fundamentos de Físca NOTA II TABELAS E GRÁFICOS II.1 - TABELAS A manera mas adequada na apresentação de uma sére de meddas de um certo epermento é através de tabelas.
Depto de Físca/UFMG Laboratóro de Fundamentos de Físca NOTA II TABELAS E GRÁFICOS II.1 - TABELAS A manera mas adequada na apresentação de uma sére de meddas de um certo epermento é através de tabelas.
Estatística stica Descritiva
 AULA1-AULA5 AULA5 Estatístca stca Descrtva Prof. Vctor Hugo Lachos Davla oo que é a estatístca? Para mutos, a estatístca não passa de conjuntos de tabelas de dados numércos. Os estatístcos são pessoas
AULA1-AULA5 AULA5 Estatístca stca Descrtva Prof. Vctor Hugo Lachos Davla oo que é a estatístca? Para mutos, a estatístca não passa de conjuntos de tabelas de dados numércos. Os estatístcos são pessoas
unesp UNIVERSIDADE ESTADUAL PAULISTA
 UNIVERSIDADE ESTADUAL PAULISTA Faculdade de Cêncas e Tecnologa Programa de Pós-Graduação em Cêncas Cartográfcas Govane Maa do Vale EXTRAÇÃO SEMI-AUTOMÁTICA DO EIXO DE RODOVIA EM IMAGENS DE MÉDIA E ALTA
UNIVERSIDADE ESTADUAL PAULISTA Faculdade de Cêncas e Tecnologa Programa de Pós-Graduação em Cêncas Cartográfcas Govane Maa do Vale EXTRAÇÃO SEMI-AUTOMÁTICA DO EIXO DE RODOVIA EM IMAGENS DE MÉDIA E ALTA
TEORIA DE ERROS * ERRO é a diferença entre um valor obtido ao se medir uma grandeza e o valor real ou correto da mesma.
 UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO CENTRO DE CIÊNCIAS EXATAS DEPARTAMENTO DE FÍSICA AV. FERNANDO FERRARI, 514 - GOIABEIRAS 29075-910 VITÓRIA - ES PROF. ANDERSON COSER GAUDIO FONE: 4009.7820 FAX: 4009.2823
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO CENTRO DE CIÊNCIAS EXATAS DEPARTAMENTO DE FÍSICA AV. FERNANDO FERRARI, 514 - GOIABEIRAS 29075-910 VITÓRIA - ES PROF. ANDERSON COSER GAUDIO FONE: 4009.7820 FAX: 4009.2823
Sistemas de equações lineares
 Sstemas - ALGA - / Sstemas de equações lneares Uma equação lnear nas ncógntas ou varáves x ; x ; :::; x n é uma expressão da forma: a x + a x + ::: + a n x n = b onde a ; a ; :::; a n ; b são constantes
Sstemas - ALGA - / Sstemas de equações lneares Uma equação lnear nas ncógntas ou varáves x ; x ; :::; x n é uma expressão da forma: a x + a x + ::: + a n x n = b onde a ; a ; :::; a n ; b são constantes
Fast Multiresolution Image Querying
 Fast Multresoluton Image Queryng Baseado no artgo proposto por: Charles E. Jacobs Adan Fnkelsten Davd H. Salesn Propõe um método para busca em um banco de dados de magem utlzando uma magem de consulta
Fast Multresoluton Image Queryng Baseado no artgo proposto por: Charles E. Jacobs Adan Fnkelsten Davd H. Salesn Propõe um método para busca em um banco de dados de magem utlzando uma magem de consulta
Análise de Regressão. Profa Alcione Miranda dos Santos Departamento de Saúde Pública UFMA
 Análse de Regressão Profa Alcone Mranda dos Santos Departamento de Saúde Públca UFMA Introdução Uma das preocupações estatístcas ao analsar dados, é a de crar modelos que explctem estruturas do fenômeno
Análse de Regressão Profa Alcone Mranda dos Santos Departamento de Saúde Públca UFMA Introdução Uma das preocupações estatístcas ao analsar dados, é a de crar modelos que explctem estruturas do fenômeno
IV - Descrição e Apresentação dos Dados. Prof. Herondino
 IV - Descrção e Apresentação dos Dados Prof. Herondno Dados A palavra "dados" é um termo relatvo, tratamento de dados comumente ocorre por etapas, e os "dados processados" a partr de uma etapa podem ser
IV - Descrção e Apresentação dos Dados Prof. Herondno Dados A palavra "dados" é um termo relatvo, tratamento de dados comumente ocorre por etapas, e os "dados processados" a partr de uma etapa podem ser
3.1. Conceitos de força e massa
 CAPÍTULO 3 Les de Newton 3.1. Concetos de força e massa Uma força representa a acção de um corpo sobre outro,.e. a nteracção físca entre dos corpos. Como grandeza vectoral que é, só fca caracterzada pelo
CAPÍTULO 3 Les de Newton 3.1. Concetos de força e massa Uma força representa a acção de um corpo sobre outro,.e. a nteracção físca entre dos corpos. Como grandeza vectoral que é, só fca caracterzada pelo
PROJEÇÕES POPULACIONAIS PARA OS MUNICÍPIOS E DISTRITOS DO CEARÁ
 GOVERNO DO ESTADO DO CEARÁ SECRETARIA DO PLANEJAMENTO E GESTÃO - SEPLAG INSTITUTO DE PESQUISA E ESTRATÉGIA ECONÔMICA DO CEARÁ - IPECE NOTA TÉCNICA Nº 29 PROJEÇÕES POPULACIONAIS PARA OS MUNICÍPIOS E DISTRITOS
GOVERNO DO ESTADO DO CEARÁ SECRETARIA DO PLANEJAMENTO E GESTÃO - SEPLAG INSTITUTO DE PESQUISA E ESTRATÉGIA ECONÔMICA DO CEARÁ - IPECE NOTA TÉCNICA Nº 29 PROJEÇÕES POPULACIONAIS PARA OS MUNICÍPIOS E DISTRITOS
CENTRO UNIVERSITÁRIO DO LESTE DE MINAS GERAIS - UnilesteMG
 1 CENTRO UNIVERSITÁRIO DO LESTE DE MINAS GERAIS - UnlesteMG Dscplna: Introdução à Intelgênca Artfcal Professor: Luz Carlos Fgueredo GUIA DE LABORATÓRIO LF. 01 Assunto: Lógca Fuzzy Objetvo: Apresentar o
1 CENTRO UNIVERSITÁRIO DO LESTE DE MINAS GERAIS - UnlesteMG Dscplna: Introdução à Intelgênca Artfcal Professor: Luz Carlos Fgueredo GUIA DE LABORATÓRIO LF. 01 Assunto: Lógca Fuzzy Objetvo: Apresentar o
ALGORITMO E PROGRAMAÇÃO
 ALGORITMO E PROGRAMAÇÃO 1 ALGORITMO É a descrção de um conjunto de ações que, obedecdas, resultam numa sucessão fnta de passos, atngndo um objetvo. 1.1 AÇÃO É um acontecmento que a partr de um estado ncal,
ALGORITMO E PROGRAMAÇÃO 1 ALGORITMO É a descrção de um conjunto de ações que, obedecdas, resultam numa sucessão fnta de passos, atngndo um objetvo. 1.1 AÇÃO É um acontecmento que a partr de um estado ncal,
Variabilidade Espacial do Teor de Água de um Argissolo sob Plantio Convencional de Feijão Irrigado
 Varabldade Espacal do Teor de Água de um Argssolo sob Planto Convenconal de Fejão Irrgado Elder Sânzo Aguar Cerquera 1 Nerlson Terra Santos 2 Cásso Pnho dos Res 3 1 Introdução O uso da água na rrgação
Varabldade Espacal do Teor de Água de um Argssolo sob Planto Convenconal de Fejão Irrgado Elder Sânzo Aguar Cerquera 1 Nerlson Terra Santos 2 Cásso Pnho dos Res 3 1 Introdução O uso da água na rrgação
DISTRIBUIÇÃO DA AÇÃO DO VENTO NOS ELEMENTOS DE CONTRAVENTAMENTO CONSIDERANDO O PAVIMENTO COMO DIAFRAGMA RÍGIDO: ANÁLISE SIMPLIFICADA E MATRICIAL
 DISTRIBUIÇÃO DA AÇÃO DO VENTO NOS ELEMENTOS DE CONTRAVENTAMENTO CONSIDERANDO O PAVIMENTO COMO DIAFRAGMA RÍGIDO: ANÁLISE SIMPLIFICADA E MATRICIAL Dstrbuton of the wnd acton n the bracng elements consderng
DISTRIBUIÇÃO DA AÇÃO DO VENTO NOS ELEMENTOS DE CONTRAVENTAMENTO CONSIDERANDO O PAVIMENTO COMO DIAFRAGMA RÍGIDO: ANÁLISE SIMPLIFICADA E MATRICIAL Dstrbuton of the wnd acton n the bracng elements consderng
Sistemas Robóticos. Sumário. Introdução. Introdução. Navegação. Introdução Onde estou? Para onde vou? Como vou lá chegar?
 Sumáro Sstemas Robótcos Navegação Introdução Onde estou? Para onde vou? Como vou lá chegar? Carlos Carreto Curso de Engenhara Informátca Ano lectvo 2003/2004 Escola Superor de Tecnologa e Gestão da Guarda
Sumáro Sstemas Robótcos Navegação Introdução Onde estou? Para onde vou? Como vou lá chegar? Carlos Carreto Curso de Engenhara Informátca Ano lectvo 2003/2004 Escola Superor de Tecnologa e Gestão da Guarda
Software para Furação e Rebitagem de Fuselagem de Aeronaves
 Anas do 14 O Encontro de Incação Centífca e Pós-Graduação do ITA XIV ENCITA / 2008 Insttuto Tecnológco de Aeronáutca São José dos Campos SP Brasl Outubro 20 a 23 2008. Software para Furação e Rebtagem
Anas do 14 O Encontro de Incação Centífca e Pós-Graduação do ITA XIV ENCITA / 2008 Insttuto Tecnológco de Aeronáutca São José dos Campos SP Brasl Outubro 20 a 23 2008. Software para Furação e Rebtagem
5.1 Seleção dos melhores regressores univariados (modelo de Índice de Difusão univariado)
") 5 Aplcação Neste capítulo será apresentada a parte empírca do estudo no qual serão avalados os prncpas regressores, um Modelo de Índce de Dfusão com o resultado dos melhores regressores (aqu chamado de
5 Aplcação Neste capítulo será apresentada a parte empírca do estudo no qual serão avalados os prncpas regressores, um Modelo de Índce de Dfusão com o resultado dos melhores regressores (aqu chamado de
ALGORITMO DE PROGRAMAÇÃO DINÂMICA: FUNDAMENTOS E APLICAÇÕES EM EXTRAÇÃO DE FEIÇÕES
 ALGORITMO DE PROGRAMAÇÃO DINÂMICA: FUNDAMENTOS E APLICAÇÕES EM EXTRAÇÃO DE FEIÇÕES Alur P. Dal Poz Govane Maa do Vale Unversdade Estadual Paulsta UNESP Departamento de Cartografa alur@prudente.unesp.br
ALGORITMO DE PROGRAMAÇÃO DINÂMICA: FUNDAMENTOS E APLICAÇÕES EM EXTRAÇÃO DE FEIÇÕES Alur P. Dal Poz Govane Maa do Vale Unversdade Estadual Paulsta UNESP Departamento de Cartografa alur@prudente.unesp.br
Software. Guia do professor. Como comprar sua moto. Secretaria de Educação a Distância. Ministério da Ciência e Tecnologia. Ministério da Educação
 números e funções Gua do professor Software Como comprar sua moto Objetvos da undade 1. Aplcar o conceto de juros compostos; 2. Introduzr o conceto de empréstmo sob juros; 3. Mostrar aplcações de progressão
números e funções Gua do professor Software Como comprar sua moto Objetvos da undade 1. Aplcar o conceto de juros compostos; 2. Introduzr o conceto de empréstmo sob juros; 3. Mostrar aplcações de progressão
A esse tipo de tabela, cujos elementos não foram numericamente organizados, denominamos tabela primitiva.
 Dstrbução de Frequênca Tabela prmtva ROL Suponhamos termos feto uma coleta de dados relatvos à estaturas de quarenta alunos, que compõem uma amostra dos alunos de um colégo A, resultando a segunte tabela
Dstrbução de Frequênca Tabela prmtva ROL Suponhamos termos feto uma coleta de dados relatvos à estaturas de quarenta alunos, que compõem uma amostra dos alunos de um colégo A, resultando a segunte tabela
Y X Baixo Alto Total Baixo 1 (0,025) 7 (0,175) 8 (0,20) Alto 19 (0,475) 13 (0,325) 32 (0,80) Total 20 (0,50) 20 (0,50) 40 (1,00)
 7 (0,175) 8 (0,20) Alto 19 (0,475) 13 (0,325) 32 (0,80) Total 20 (0,50) 20 (0,50) 40 (1,00)") Bussab&Morettn Estatístca Básca Capítulo 4 Problema. (b) Grau de Instrução Procedênca º grau º grau Superor Total Interor 3 (,83) 7 (,94) (,) (,33) Captal 4 (,) (,39) (,) (,3) Outra (,39) (,7) (,) 3 (,3)
Bussab&Morettn Estatístca Básca Capítulo 4 Problema. (b) Grau de Instrução Procedênca º grau º grau Superor Total Interor 3 (,83) 7 (,94) (,) (,33) Captal 4 (,) (,39) (,) (,3) Outra (,39) (,7) (,) 3 (,3)
Elaboração: Fevereiro/2008
 Elaboração: Feverero/2008 Últma atualzação: 19/02/2008 E ste Caderno de Fórmulas tem por objetvo esclarecer aos usuáros a metodologa de cálculo e os crtéros de precsão utlzados na atualzação das Letras
Elaboração: Feverero/2008 Últma atualzação: 19/02/2008 E ste Caderno de Fórmulas tem por objetvo esclarecer aos usuáros a metodologa de cálculo e os crtéros de precsão utlzados na atualzação das Letras
Expressão da Incerteza de Medição para a Grandeza Energia Elétrica
 1 a 5 de Agosto de 006 Belo Horzonte - MG Expressão da ncerteza de Medção para a Grandeza Energa Elétrca Eng. Carlos Alberto Montero Letão CEMG Dstrbução S.A caletao@cemg.com.br Eng. Sérgo Antôno dos Santos
1 a 5 de Agosto de 006 Belo Horzonte - MG Expressão da ncerteza de Medção para a Grandeza Energa Elétrca Eng. Carlos Alberto Montero Letão CEMG Dstrbução S.A caletao@cemg.com.br Eng. Sérgo Antôno dos Santos
Aplicações de Estimadores Bayesianos Empíricos para Análise Espacial de Taxas de Mortalidade
 Aplcações de Estmadores Bayesanos Empírcos para Análse Espacal de Taxas de Mortaldade Alexandre E. dos Santos, Alexandre L. Rodrgues, Danlo L. Lopes Departamento de Estatístca Unversdade Federal de Mnas
Aplcações de Estmadores Bayesanos Empírcos para Análse Espacal de Taxas de Mortaldade Alexandre E. dos Santos, Alexandre L. Rodrgues, Danlo L. Lopes Departamento de Estatístca Unversdade Federal de Mnas
Estimativa da Incerteza de Medição da Viscosidade Cinemática pelo Método Manual em Biodiesel
 Estmatva da Incerteza de Medção da Vscosdade Cnemátca pelo Método Manual em Bodesel Roberta Quntno Frnhan Chmn 1, Gesamanda Pedrn Brandão 2, Eustáquo Vncus Rbero de Castro 3 1 LabPetro-DQUI-UFES, Vtóra-ES,
Estmatva da Incerteza de Medção da Vscosdade Cnemátca pelo Método Manual em Bodesel Roberta Quntno Frnhan Chmn 1, Gesamanda Pedrn Brandão 2, Eustáquo Vncus Rbero de Castro 3 1 LabPetro-DQUI-UFES, Vtóra-ES,
7. Resolução Numérica de Equações Diferenciais Ordinárias
 7. Resolução Numérca de Equações Dferencas Ordnáras Fenômenos físcos em dversas áreas, tas como: mecânca dos fludos, fluo de calor, vbrações, crcutos elétrcos, reações químcas, dentre váras outras, podem
7. Resolução Numérca de Equações Dferencas Ordnáras Fenômenos físcos em dversas áreas, tas como: mecânca dos fludos, fluo de calor, vbrações, crcutos elétrcos, reações químcas, dentre váras outras, podem
b. As medidas de posição mais importantes são as medidas de tendência central. Dentre elas, destacamos: média aritmética, mediana, moda.
 Meddas de Posção Introdução a. Dentre os elementos típcos, destacamos aqu as meddas de posção _ estatístcas que representam uma sére de dados orentando-nos quanto à posção da dstrbução em relação ao exo
Meddas de Posção Introdução a. Dentre os elementos típcos, destacamos aqu as meddas de posção _ estatístcas que representam uma sére de dados orentando-nos quanto à posção da dstrbução em relação ao exo
O que heterocedasticidade? Heterocedasticidade. Por que se preocupar com heterocedasticidade? Exemplo de heterocedasticidade.
 Heterocedastcdade y = β 0 + β + β + β k k + u O que heterocedastcdade? Lembre-se da hpótese de homocedastcdade: condconal às varáves eplcatvas, a varânca do erro, u, é constante Se sso não for verdade,
Heterocedastcdade y = β 0 + β + β + β k k + u O que heterocedastcdade? Lembre-se da hpótese de homocedastcdade: condconal às varáves eplcatvas, a varânca do erro, u, é constante Se sso não for verdade,
Regressão e Correlação Linear
 Probabldade e Estatístca I Antono Roque Aula 5 Regressão e Correlação Lnear Até o momento, vmos técncas estatístcas em que se estuda uma varável de cada vez, estabelecendo-se sua dstrbução de freqüêncas,
Probabldade e Estatístca I Antono Roque Aula 5 Regressão e Correlação Lnear Até o momento, vmos técncas estatístcas em que se estuda uma varável de cada vez, estabelecendo-se sua dstrbução de freqüêncas,
Introdução à Análise de Dados nas medidas de grandezas físicas
 Introdução à Análse de Dados nas meddas de grandezas físcas www.chem.wts.ac.za/chem0/ http://uregna.ca/~peresnep/ www.ph.ed.ac.uk/~td/p3lab/analss/ otas baseadas nos apontamentos Análse de Dados do Prof.
Introdução à Análse de Dados nas meddas de grandezas físcas www.chem.wts.ac.za/chem0/ http://uregna.ca/~peresnep/ www.ph.ed.ac.uk/~td/p3lab/analss/ otas baseadas nos apontamentos Análse de Dados do Prof.
Análise de Variância. Introdução. Rejane Sobrino Pinheiro Tania Guillén de Torres
 Análse de Varânca Rejane Sobrno Pnhero Tana Gullén de Torres Análse de Varânca Introdução Modelos de análse de varânca consttuem uma classe de modelos que relaconam uma varável resposta contínua com varáves
Análse de Varânca Rejane Sobrno Pnhero Tana Gullén de Torres Análse de Varânca Introdução Modelos de análse de varânca consttuem uma classe de modelos que relaconam uma varável resposta contínua com varáves
Avaliação da Tendência de Precipitação Pluviométrica Anual no Estado de Sergipe. Evaluation of the Annual Rainfall Trend in the State of Sergipe
 Avalação da Tendênca de Precptação Pluvométrca Anual no Estado de Sergpe Dandara de Olvera Félx, Inaá Francsco de Sousa 2, Pablo Jónata Santana da Slva Nascmento, Davd Noguera dos Santos 3 Graduandos em
Avalação da Tendênca de Precptação Pluvométrca Anual no Estado de Sergpe Dandara de Olvera Félx, Inaá Francsco de Sousa 2, Pablo Jónata Santana da Slva Nascmento, Davd Noguera dos Santos 3 Graduandos em
Prof. Antônio Carlos Fontes dos Santos. Aula 1: Divisores de tensão e Resistência interna de uma fonte de tensão
 IF-UFRJ Elementos de Eletrônca Analógca Prof. Antôno Carlos Fontes dos Santos FIW362 Mestrado Profssonal em Ensno de Físca Aula 1: Dvsores de tensão e Resstênca nterna de uma fonte de tensão Este materal
IF-UFRJ Elementos de Eletrônca Analógca Prof. Antôno Carlos Fontes dos Santos FIW362 Mestrado Profssonal em Ensno de Físca Aula 1: Dvsores de tensão e Resstênca nterna de uma fonte de tensão Este materal
Exercícios de Física. Prof. Panosso. Fontes de campo magnético
 1) A fgura mostra um prego de ferro envolto por um fo fno de cobre esmaltado, enrolado mutas vezes ao seu redor. O conjunto pode ser consderado um eletroímã quando as extremdades do fo são conectadas aos
1) A fgura mostra um prego de ferro envolto por um fo fno de cobre esmaltado, enrolado mutas vezes ao seu redor. O conjunto pode ser consderado um eletroímã quando as extremdades do fo são conectadas aos
Controle de qualidade de produto cartográfico aplicado a imagem de alta resolução
 Controle de qualdade de produto cartográfco aplcado a magem de alta resolução Nathála de Alcântara Rodrgues Alves¹ Mara Emanuella Frmno Barbosa¹ Sydney de Olvera Das¹ ¹ Insttuto Federal de Educação Cênca
Controle de qualdade de produto cartográfco aplcado a magem de alta resolução Nathála de Alcântara Rodrgues Alves¹ Mara Emanuella Frmno Barbosa¹ Sydney de Olvera Das¹ ¹ Insttuto Federal de Educação Cênca
Estatística Experimental Medicina Veterinária. Faculadade de Ciências Agrárias e Veterinárias. Campus de Jaboticabal SP. Gener Tadeu Pereira
 MATERIAL DIDÁTICO Medcna Veternára Faculadade de Cêncas Agráras e Veternáras Campus de Jabotcabal SP Gener Tadeu Perera º SEMESTRE DE 04 ÍNDICE INTRODUÇÃO AO R AULA ESTATÍSTICA DESCRITIVA 3 º EXERCÍCIO
MATERIAL DIDÁTICO Medcna Veternára Faculadade de Cêncas Agráras e Veternáras Campus de Jabotcabal SP Gener Tadeu Perera º SEMESTRE DE 04 ÍNDICE INTRODUÇÃO AO R AULA ESTATÍSTICA DESCRITIVA 3 º EXERCÍCIO
2 Máquinas de Vetor Suporte 2.1. Introdução
 Máqunas de Vetor Suporte.. Introdução Os fundamentos das Máqunas de Vetor Suporte (SVM) foram desenvolvdos por Vapnk e colaboradores [], [3], [4]. A formulação por ele apresentada se basea no prncípo de
Máqunas de Vetor Suporte.. Introdução Os fundamentos das Máqunas de Vetor Suporte (SVM) foram desenvolvdos por Vapnk e colaboradores [], [3], [4]. A formulação por ele apresentada se basea no prncípo de
ANÁLISE EXPLORATÓRIA DE DADOS
 CENTRO DE CIÊNCIAS EXATAS CCE DEPARTAMENTO DE ESTATÍSTICA Curso de Especalzação Lato Sensu em Estatístca ANÁLISE EXPLORATÓRIA DE DADOS Professor: Dr. Waldr Medr medr@uel.br Londrna/Pr Março de 011 ÍNDICE
CENTRO DE CIÊNCIAS EXATAS CCE DEPARTAMENTO DE ESTATÍSTICA Curso de Especalzação Lato Sensu em Estatístca ANÁLISE EXPLORATÓRIA DE DADOS Professor: Dr. Waldr Medr medr@uel.br Londrna/Pr Março de 011 ÍNDICE
Controle Estatístico de Qualidade. Capítulo 8 (montgomery)
") Controle Estatístco de Qualdade Capítulo 8 (montgomery) Gráfco CUSUM e da Méda Móvel Exponencalmente Ponderada Introdução Cartas de Controle Shewhart Usa apenas a nformação contda no últmo ponto plotado
Controle Estatístco de Qualdade Capítulo 8 (montgomery) Gráfco CUSUM e da Méda Móvel Exponencalmente Ponderada Introdução Cartas de Controle Shewhart Usa apenas a nformação contda no últmo ponto plotado
Estimativa dos fluxos turbulentos de calor sensível, calor latente e CO 2, sobre cana-de-açúcar, pelo método do coespectro.
 Estmatva dos fluxos turbulentos de calor sensível, calor latente e CO 2, sobre cana-de-açúcar, pelo método do coespectro. O. L. L. Moraes 1, H. R. da Rocha 2, M. A. Faus da Slva Das 2, O Cabral 3 1 Departamento
Estmatva dos fluxos turbulentos de calor sensível, calor latente e CO 2, sobre cana-de-açúcar, pelo método do coespectro. O. L. L. Moraes 1, H. R. da Rocha 2, M. A. Faus da Slva Das 2, O Cabral 3 1 Departamento
TRABALHADORES COM DEFICIÊNCIAS EM LINHAS DE PRODUÇÃO: MODELOS, RESULTADOS E DISCUSSÕES 1
 XIV ELAVIO El Fuerte Snaloa Méxco 9-14 de agosto de 2009 TRABALHADORES COM DEFICIÊNCIAS EM LINHAS DE PRODUÇÃO: MODELOS RESULTADOS E DISCUSSÕES 1 Mayron César de O. Morera Lana Mara R. Santos Alysson M.
XIV ELAVIO El Fuerte Snaloa Méxco 9-14 de agosto de 2009 TRABALHADORES COM DEFICIÊNCIAS EM LINHAS DE PRODUÇÃO: MODELOS RESULTADOS E DISCUSSÕES 1 Mayron César de O. Morera Lana Mara R. Santos Alysson M.
Consideraremos agora, uma de cada vez, as equivalentes angulares das grandezas de posição, deslocamento, velocidade e aceleração.
 CAPÍTULO 5 77 5.1 Introdução A cnemátca dos corpos rígdos trata dos movmentos de translação e rotação. No movmento de translação pura todas as partes de um corpo sofrem o mesmo deslocamento lnear. Por
CAPÍTULO 5 77 5.1 Introdução A cnemátca dos corpos rígdos trata dos movmentos de translação e rotação. No movmento de translação pura todas as partes de um corpo sofrem o mesmo deslocamento lnear. Por
INFLUÊNCIA DAS VARIÁVEIS OPERACIONAIS NA REMOÇÃO DE ETANOL DE VINHO DELEVEDURADO POR CO 2
 INFLUÊNCIA DAS VARIÁVEIS OPERACIONAIS NA REMOÇÃO DE ANOL DE VINHO DELEVEDURADO POR CO 2 C. R. SILVA 1, M. N. ESPERANÇA 1, A. J. G. CRUZ 1 e A. C. BADINO 1 1 Unversdade Federal de São Carlos, Departamento
INFLUÊNCIA DAS VARIÁVEIS OPERACIONAIS NA REMOÇÃO DE ANOL DE VINHO DELEVEDURADO POR CO 2 C. R. SILVA 1, M. N. ESPERANÇA 1, A. J. G. CRUZ 1 e A. C. BADINO 1 1 Unversdade Federal de São Carlos, Departamento
PROBLEMAS SOBRE PONTOS Davi Máximo (UFC) e Samuel Feitosa (UFC)
 e Samuel Feitosa (UFC)") PROBLEMS SOBRE PONTOS Dav Máxmo (UFC) e Samuel Fetosa (UFC) Nível vançado Dstrbur pontos num plano ou num espaço é uma tarefa que pode ser realzada de forma muto arbtrára Por sso, problemas sobre pontos
PROBLEMS SOBRE PONTOS Dav Máxmo (UFC) e Samuel Fetosa (UFC) Nível vançado Dstrbur pontos num plano ou num espaço é uma tarefa que pode ser realzada de forma muto arbtrára Por sso, problemas sobre pontos
CURRICULUM VITAE - RESUMIDO
 A estatístca tem uma partculardade: pesqusamos para dzer algo sgnfcatvo sobre o unverso que elegemos, porém a pesqusa só será sgnfcatva se conhecermos sufcentemente o unverso para escolhermos adequadamente
A estatístca tem uma partculardade: pesqusamos para dzer algo sgnfcatvo sobre o unverso que elegemos, porém a pesqusa só será sgnfcatva se conhecermos sufcentemente o unverso para escolhermos adequadamente
Comprimento de Arco. Comprimento de Arco
 UNIVERSIDADE DO ESTADO DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE ENGENHARIA CIVIL DISCIPLINA: CÁLCULO DIFERENCIAL E INTEGRAL I Comprmento de Arco
UNIVERSIDADE DO ESTADO DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE ENGENHARIA CIVIL DISCIPLINA: CÁLCULO DIFERENCIAL E INTEGRAL I Comprmento de Arco
Probabilidade e Estatística. Correlação e Regressão Linear
 Probabldade e Estatístca Correlação e Regressão Lnear Varáves Varável: característcas ou tens de nteresse de cada elemento de uma população ou amostra Também chamada parâmetro, posconamento, condção...
Probabldade e Estatístca Correlação e Regressão Lnear Varáves Varável: característcas ou tens de nteresse de cada elemento de uma população ou amostra Também chamada parâmetro, posconamento, condção...
CQ110 : Princípios de FQ
 CQ110 : Prncípos de FQ CQ 110 Prncípos de Físco Químca Curso: Farmáca Prof. Dr. Marco Vdott mvdott@ufpr.br Potencal químco, m potencal químco CQ110 : Prncípos de FQ Propredades termodnâmcas das soluções
CQ110 : Prncípos de FQ CQ 110 Prncípos de Físco Químca Curso: Farmáca Prof. Dr. Marco Vdott mvdott@ufpr.br Potencal químco, m potencal químco CQ110 : Prncípos de FQ Propredades termodnâmcas das soluções
3ª AULA: ESTATÍSTICA DESCRITIVA Medidas Numéricas
 PROGRAMA DE PÓS-GRADUAÇÃO EM EGEHARIA DE TRASPORTES E GESTÃO TERRITORIAL PPGTG DEPARTAMETO DE EGEHARIA CIVIL ECV DISCIPLIA: TGT41006 FUDAMETOS DE ESTATÍSTICA 3ª AULA: ESTATÍSTICA DESCRITIVA Meddas umércas
PROGRAMA DE PÓS-GRADUAÇÃO EM EGEHARIA DE TRASPORTES E GESTÃO TERRITORIAL PPGTG DEPARTAMETO DE EGEHARIA CIVIL ECV DISCIPLIA: TGT41006 FUDAMETOS DE ESTATÍSTICA 3ª AULA: ESTATÍSTICA DESCRITIVA Meddas umércas
POSICIONAMENTO DIFERENCIAL PÓS-PROCESSADO UTILIZANDO MULTIESTAÇÕES GPS
 II Smpóso Braslero de Cêncas Geodéscas e Tecnologas da Geonformação Recfe - PE, 8- de setembro de 28 p. - POSICIONMENTO DIFERENCIL PÓS-PROCESSDO UTILIZNDO MULTIESTÇÕES GPS MURICIO IHLENFELDT SEJS CLÁUDI
II Smpóso Braslero de Cêncas Geodéscas e Tecnologas da Geonformação Recfe - PE, 8- de setembro de 28 p. - POSICIONMENTO DIFERENCIL PÓS-PROCESSDO UTILIZNDO MULTIESTÇÕES GPS MURICIO IHLENFELDT SEJS CLÁUDI
Nota Técnica Médias do ENEM 2009 por Escola
 Nota Técnca Médas do ENEM 2009 por Escola Crado em 1998, o Exame Naconal do Ensno Médo (ENEM) tem o objetvo de avalar o desempenho do estudante ao fm da escolardade básca. O Exame destna-se aos alunos
Nota Técnca Médas do ENEM 2009 por Escola Crado em 1998, o Exame Naconal do Ensno Médo (ENEM) tem o objetvo de avalar o desempenho do estudante ao fm da escolardade básca. O Exame destna-se aos alunos
Termodinâmica e Termoquímica
 Termodnâmca e Termoquímca Introdução A cênca que trata da energa e suas transformações é conhecda como termodnâmca. A termodnâmca fo a mola mestra para a revolução ndustral, portanto o estudo e compreensão
Termodnâmca e Termoquímca Introdução A cênca que trata da energa e suas transformações é conhecda como termodnâmca. A termodnâmca fo a mola mestra para a revolução ndustral, portanto o estudo e compreensão
7.4 Precificação dos Serviços de Transmissão em Ambiente Desregulamentado
 64 Capítulo 7: Introdução ao Estudo de Mercados de Energa Elétrca 7.4 Precfcação dos Servços de Transmssão em Ambente Desregulamentado A re-estruturação da ndústra de energa elétrca que ocorreu nos últmos
64 Capítulo 7: Introdução ao Estudo de Mercados de Energa Elétrca 7.4 Precfcação dos Servços de Transmssão em Ambente Desregulamentado A re-estruturação da ndústra de energa elétrca que ocorreu nos últmos
UNIVERSIDADE PRESBITERIANA MACKENZIE CCSA - Centro de Ciências Sociais e Aplicadas Curso de Economia
 CCSA - Centro de Cêncas Socas e Aplcadas Curso de Economa ECONOMIA REGIONAL E URBANA Prof. ladmr Fernandes Macel LISTA DE ESTUDO. Explque a lógca da teora da base econômca. A déa que sustenta a teora da
CCSA - Centro de Cêncas Socas e Aplcadas Curso de Economa ECONOMIA REGIONAL E URBANA Prof. ladmr Fernandes Macel LISTA DE ESTUDO. Explque a lógca da teora da base econômca. A déa que sustenta a teora da
SOLUÇÕES DA EQUAÇÃO DA CONDUÇÃO DO CALOR BIDIMENSIONAL COM CONDUTIVIDADE TÉRMICA DEPENDENTE DA TEMPERATURA E GERAÇÃO DE CALOR
 SOLUÇÕES DA EQUAÇÃO DA CONDUÇÃO DO CALOR BIDIMENSIONAL COM CONDUTIVIDADE TÉRMICA DEENDENTE DA TEMERATURA E GERAÇÃO DE CALOR E. T. CABRAL,. A. ONTES, H. K. MIYAGAWA, E. N. MACÊDO 3 e J. N. N. QUARESMA 3
SOLUÇÕES DA EQUAÇÃO DA CONDUÇÃO DO CALOR BIDIMENSIONAL COM CONDUTIVIDADE TÉRMICA DEENDENTE DA TEMERATURA E GERAÇÃO DE CALOR E. T. CABRAL,. A. ONTES, H. K. MIYAGAWA, E. N. MACÊDO 3 e J. N. N. QUARESMA 3
As tabelas resumem as informações obtidas da amostra ou da população. Essas tabelas podem ser construídas sem ou com perda de informações.
 1. TABELA DE DISTRIBUIÇÃO DE FREQÜÊNCIA As tabelas resumem as normações obtdas da amostra ou da população. Essas tabelas podem ser construídas sem ou com perda de normações. As tabelas sem perda de normação
1. TABELA DE DISTRIBUIÇÃO DE FREQÜÊNCIA As tabelas resumem as normações obtdas da amostra ou da população. Essas tabelas podem ser construídas sem ou com perda de normações. As tabelas sem perda de normação
1 a Lei de Kirchhoff ou Lei dos Nós: Num nó, a soma das intensidades de correntes que chegam é igual à soma das intensidades de correntes que saem.
 Les de Krchhoff Até aqu você aprendeu técncas para resolver crcutos não muto complexos. Bascamente todos os métodos foram baseados na 1 a Le de Ohm. Agora você va aprender as Les de Krchhoff. As Les de
Les de Krchhoff Até aqu você aprendeu técncas para resolver crcutos não muto complexos. Bascamente todos os métodos foram baseados na 1 a Le de Ohm. Agora você va aprender as Les de Krchhoff. As Les de
Influência dos Procedimentos de Ensaios e Tratamento de Dados em Análise Probabilística de Estrutura de Contenção
 Influênca dos Procedmentos de Ensaos e Tratamento de Dados em Análse Probablístca de Estrutura de Contenção Mara Fatma Mranda UENF, Campos dos Goytacazes, RJ, Brasl. Paulo César de Almeda Maa UENF, Campos
Influênca dos Procedmentos de Ensaos e Tratamento de Dados em Análse Probablístca de Estrutura de Contenção Mara Fatma Mranda UENF, Campos dos Goytacazes, RJ, Brasl. Paulo César de Almeda Maa UENF, Campos
MODELAGEM MATEMÁTICA DO PROCESSO DE EVAPORAÇÃO MULTI-EFEITO NA INDÚSTRIA DE PAPEL E CELULOSE
 MODELAGEM MATEMÁTICA DO PROCESSO DE EVAPORAÇÃO MULTI-EFEITO NA INDÚSTRIA DE PAPEL E CELULOSE R. L. S. CANEVESI 1, C. L. DIEL 2, K. A. SANTOS 1, C. E. BORBA 1, F. PALÚ 1, E. A. DA SILVA 1 1 Unversdade Estadual
MODELAGEM MATEMÁTICA DO PROCESSO DE EVAPORAÇÃO MULTI-EFEITO NA INDÚSTRIA DE PAPEL E CELULOSE R. L. S. CANEVESI 1, C. L. DIEL 2, K. A. SANTOS 1, C. E. BORBA 1, F. PALÚ 1, E. A. DA SILVA 1 1 Unversdade Estadual
Geração de poses de faces utilizando Active Appearance Model Tupã Negreiros 1, Marcos R. P. Barretto 2, Jun Okamoto 3
 Geração de poses de faces utlzando Actve Appearance Model Tupã Negreros 1, Marcos R. P. Barretto 2, Jun Okamoto 3 1, 2, 3 Escola Poltécnca da Unversdade de São Paulo (POLI/USP) Caxa Postal 61548 CEP 05508-900
Geração de poses de faces utlzando Actve Appearance Model Tupã Negreros 1, Marcos R. P. Barretto 2, Jun Okamoto 3 1, 2, 3 Escola Poltécnca da Unversdade de São Paulo (POLI/USP) Caxa Postal 61548 CEP 05508-900
Estimativa da fração da vegetação a partir de dados AVHRR/NOAA
 Estmatva da fração da vegetação a partr de dados AVHRR/NOAA Fabane Regna Cunha Dantas 1, Céla Campos Braga, Soetâna Santos de Olvera 1, Tacana Lma Araújo 1 1 Doutoranda em Meteorologa pela Unversdade Federal
Estmatva da fração da vegetação a partr de dados AVHRR/NOAA Fabane Regna Cunha Dantas 1, Céla Campos Braga, Soetâna Santos de Olvera 1, Tacana Lma Araújo 1 1 Doutoranda em Meteorologa pela Unversdade Federal
LOCALIZAÇÃO ESPACIAL DA MÃO DO USUÁRIO UTILIZANDO WII REMOTE. Ricardo Silva Tavares 1 ; Roberto Scalco 2
 LOCALIZAÇÃO ESPACIAL DA MÃO DO USUÁRIO UTILIZANDO WII REMOTE Rcardo Slva Tavares 1 ; Roberto Scalco 1 Aluno de Incação Centífca da Escola de Engenhara Mauá (EEM/CEUN-IMT); Professor da Escola de Engenhara
LOCALIZAÇÃO ESPACIAL DA MÃO DO USUÁRIO UTILIZANDO WII REMOTE Rcardo Slva Tavares 1 ; Roberto Scalco 1 Aluno de Incação Centífca da Escola de Engenhara Mauá (EEM/CEUN-IMT); Professor da Escola de Engenhara
Determinantes. De nição de determinante de uma matriz quadrada. Determinantes - ALGA - 2004/05 15
 Determnantes - ALGA - 004/05 15 Permutações Determnantes Seja n N Uma permutação p = (p 1 ; p ; : : : ; p n ) do conjunto f1; ; ; ng é um arranjo dos n números em alguma ordem, sem repetções ou omssões
Determnantes - ALGA - 004/05 15 Permutações Determnantes Seja n N Uma permutação p = (p 1 ; p ; : : : ; p n ) do conjunto f1; ; ; ng é um arranjo dos n números em alguma ordem, sem repetções ou omssões
Hoje não tem vitamina, o liquidificador quebrou!
 A U A UL LA Hoje não tem vtamna, o lqudfcador quebrou! Essa fo a notíca dramátca dada por Crstana no café da manhã, lgeramente amenzada pela promessa de uma breve solução. - Seu pa dsse que arruma à note!
A U A UL LA Hoje não tem vtamna, o lqudfcador quebrou! Essa fo a notíca dramátca dada por Crstana no café da manhã, lgeramente amenzada pela promessa de uma breve solução. - Seu pa dsse que arruma à note!
UMA REDE NEURAL ARTIFICIAL HÍBRIDA: MULTI-LAYER PERCEPTRON (MLP) E INTERAC- TIVE ACTIVATION AND COMPETITION (IAC)
 E INTERAC- TIVE ACTIVATION AND COMPETITION (IAC)") UMA REDE NEURAL ARTIFICIAL HÍBRIDA: MULTI-LAYER PERCEPTRON (MLP) E INTERAC- TIVE ACTIVATION AND COMPETITION (IAC) ANDRÉA T. R. BARBOSA, GLORIA M. CURILEM SALDÍAS, FERNANDO M. DE AZEVEDO Hosptal São Vcente
UMA REDE NEURAL ARTIFICIAL HÍBRIDA: MULTI-LAYER PERCEPTRON (MLP) E INTERAC- TIVE ACTIVATION AND COMPETITION (IAC) ANDRÉA T. R. BARBOSA, GLORIA M. CURILEM SALDÍAS, FERNANDO M. DE AZEVEDO Hosptal São Vcente
O Método de Redes Neurais com Função de Ativação de Base Radial para Classificação em Data Mining
 O Método de Redes Neuras com Função de Atvação de Base Radal para Classfcação em Data Mnng Ana Paula Scott 1, Mersandra Côrtes de Matos 2, Prscyla Walesa T. A. Smões 2 1 Acadêmco do Curso de Cênca da Computação
O Método de Redes Neuras com Função de Atvação de Base Radal para Classfcação em Data Mnng Ana Paula Scott 1, Mersandra Côrtes de Matos 2, Prscyla Walesa T. A. Smões 2 1 Acadêmco do Curso de Cênca da Computação
1 Topologias Básicas de Conversores CC-CC não-isolados
 1 opologas Báscas de Conversores CC-CC não-solados 1.1 Prncípos báscos As análses que se seguem consderam que os conversores não apresentam perdas de potênca (rendmento 100%). Os nterruptores (transstores
1 opologas Báscas de Conversores CC-CC não-solados 1.1 Prncípos báscos As análses que se seguem consderam que os conversores não apresentam perdas de potênca (rendmento 100%). Os nterruptores (transstores
ANÁLISE DE CONFIABILIDADE DO MODELO SCS-CN EM DIFERENTES ESCALAS ESPACIAIS NO SEMIÁRIDO
 ANÁLISE DE CONFIABILIDADE DO MODELO SCS-CN EM DIFERENTES ESCALAS ESPACIAIS NO SEMIÁRIDO J. W. B. Lopes 1 ; E. A. R. Pnhero 2 ; J. R. de Araújo Neto 3 ; J. C. N. dos Santos 4 RESUMO: Esse estudo fo conduzdo
ANÁLISE DE CONFIABILIDADE DO MODELO SCS-CN EM DIFERENTES ESCALAS ESPACIAIS NO SEMIÁRIDO J. W. B. Lopes 1 ; E. A. R. Pnhero 2 ; J. R. de Araújo Neto 3 ; J. C. N. dos Santos 4 RESUMO: Esse estudo fo conduzdo
EXTRAÇÃO AUTOMÁTICA DE CONTORNOS DE TELHADOS USANDO DADOS DE VARREDURA A LASER E CAMPOS RANDÔMICOS DE MARKOV
 EXTRAÇÃO AUTOMÁTICA DE CONTORNOS DE TELHADOS USANDO DADOS DE VARREDURA A LASER E CAMPOS RANDÔMICOS DE MARKOV Automatc Extracton of Buldng Roof Contours by Laser Scannng Data and Markov Random Feld Ednéa
EXTRAÇÃO AUTOMÁTICA DE CONTORNOS DE TELHADOS USANDO DADOS DE VARREDURA A LASER E CAMPOS RANDÔMICOS DE MARKOV Automatc Extracton of Buldng Roof Contours by Laser Scannng Data and Markov Random Feld Ednéa
S.A. 1. 2002; TIPLER, P. A.; MOSCA, G.
 Rotação Nota Alguns sldes, fguras e exercícos pertencem às seguntes referêncas: HALLIDAY, D., RESNICK, R., WALKER, J. Fundamentos da Físca. V 1. 4a.Edção. Ed. Lvro Técnco Centífco S.A. 00; TIPLER, P. A.;
Rotação Nota Alguns sldes, fguras e exercícos pertencem às seguntes referêncas: HALLIDAY, D., RESNICK, R., WALKER, J. Fundamentos da Físca. V 1. 4a.Edção. Ed. Lvro Técnco Centífco S.A. 00; TIPLER, P. A.;
Controlo Metrológico de Contadores de Gás
 Controlo Metrológco de Contadores de Gás José Mendonça Das (jad@fct.unl.pt), Zulema Lopes Perera (zlp@fct.unl.pt) Departamento de Engenhara Mecânca e Industral, Faculdade de Cêncas e Tecnologa da Unversdade
Controlo Metrológco de Contadores de Gás José Mendonça Das (jad@fct.unl.pt), Zulema Lopes Perera (zlp@fct.unl.pt) Departamento de Engenhara Mecânca e Industral, Faculdade de Cêncas e Tecnologa da Unversdade
MAPEAMENTO DA VARIABILIDADE ESPACIAL
 IT 90 Prncípos em Agrcultura de Precsão IT Departamento de Engenhara ÁREA DE MECANIZAÇÃO AGRÍCOLA MAPEAMENTO DA VARIABILIDADE ESPACIAL Carlos Alberto Alves Varella Para o mapeamento da varabldade espacal
IT 90 Prncípos em Agrcultura de Precsão IT Departamento de Engenhara ÁREA DE MECANIZAÇÃO AGRÍCOLA MAPEAMENTO DA VARIABILIDADE ESPACIAL Carlos Alberto Alves Varella Para o mapeamento da varabldade espacal
ANÁLISE DE ERROS. Todas as medidas das grandezas físicas deverão estar sempre acompanhadas da sua dimensão (unidades)! ERROS
! ERROS") Físca Arqutectura Pasagístca Análse de erros ANÁLISE DE ERROS A ervação de u fenóeno físco não é copleta se não puderos quantfcá-lo Para é sso é necessáro edr ua propredade físca O processo de edda consste
Físca Arqutectura Pasagístca Análse de erros ANÁLISE DE ERROS A ervação de u fenóeno físco não é copleta se não puderos quantfcá-lo Para é sso é necessáro edr ua propredade físca O processo de edda consste
Faculdade de Ciências e Tecnologia. Programa de Pós-Graduação em Ciências Cartográficas JAQUELINE VICENTE
 unesp UNIVERSIDADE ESTADUAL PAULISTA Faculdade de Cêncas e Tecnologa Programa de Pós-Graduação em Cêncas Cartográfcas JAQUELINE VICENTE ESTUDO COMPARATIVO DE MÉTODOS GEOESTATÍSTICOS APLICADOS EM AGRICULTURA
unesp UNIVERSIDADE ESTADUAL PAULISTA Faculdade de Cêncas e Tecnologa Programa de Pós-Graduação em Cêncas Cartográfcas JAQUELINE VICENTE ESTUDO COMPARATIVO DE MÉTODOS GEOESTATÍSTICOS APLICADOS EM AGRICULTURA
Licença de uso exclusiva para Petrobrás S.A. Licença de uso exclusiva para Petrobrás S.A. NBR 6123. Forças devidas ao vento em edificações JUN 1988
 ABNT-Assocação Braslera de Normas Técncas Sede: Ro de Janero Av. Treze de Mao, 13-28º andar CEP 20003 - Caxa Postal 1680 Ro de Janero - RJ Tel.: PABX (021) 210-3122 Telex: (021) 34333 ABNT - BR Endereço
ABNT-Assocação Braslera de Normas Técncas Sede: Ro de Janero Av. Treze de Mao, 13-28º andar CEP 20003 - Caxa Postal 1680 Ro de Janero - RJ Tel.: PABX (021) 210-3122 Telex: (021) 34333 ABNT - BR Endereço
FUNÇÃO NO R PARA OBTENÇÃO DO DESENHO D-ÓTIMO EM MODELOS DE MISTURAS COM RESTRIÇÕES
 FUNÇÃO NO R PARA OBTENÇÃO DO DESENHO D-ÓTIMO EM MODELOS DE MISTURAS COM RESTRIÇÕES Edmlson Rodrgues Pnto Leandro Alves Perera Faculdade de Matemátca Faculdade de Matemátca Unversdade Federal de Uberlânda
FUNÇÃO NO R PARA OBTENÇÃO DO DESENHO D-ÓTIMO EM MODELOS DE MISTURAS COM RESTRIÇÕES Edmlson Rodrgues Pnto Leandro Alves Perera Faculdade de Matemátca Faculdade de Matemátca Unversdade Federal de Uberlânda
Modelagem Empírica da Transferência Goticular Projetada em Processos de Soldagem GMAW
 Modelagem Empírca da Transferênca Gotcular Projetada em Processos de Soldagem GMAW (Emprcal Modelng of Projected Spray Transfer n GMAW Processes) Jesús Emlo Pnto Lopera, Sadek C. Abs Alfaro, José Maurco
Modelagem Empírca da Transferênca Gotcular Projetada em Processos de Soldagem GMAW (Emprcal Modelng of Projected Spray Transfer n GMAW Processes) Jesús Emlo Pnto Lopera, Sadek C. Abs Alfaro, José Maurco
Análise Fatorial F 1 F 2
 Análse Fatoral Análse Fatoral: A Análse Fatoral tem como prncpal objetvo descrever um conjunto de varáves orgnas através da cração de um número menor de varáves (fatores). Os fatores são varáves hpotétcas
Análse Fatoral Análse Fatoral: A Análse Fatoral tem como prncpal objetvo descrever um conjunto de varáves orgnas através da cração de um número menor de varáves (fatores). Os fatores são varáves hpotétcas
Probabilidade e Estatística. Correlação e Regressão Linear
 Probabldade e Estatístca Correlação e Regressão Lnear Correlação Este uma correlação entre duas varáves quando uma delas está, de alguma forma, relaconada com a outra. Gráfco ou Dagrama de Dspersão é o
Probabldade e Estatístca Correlação e Regressão Lnear Correlação Este uma correlação entre duas varáves quando uma delas está, de alguma forma, relaconada com a outra. Gráfco ou Dagrama de Dspersão é o
Caderno de Exercícios Resolvidos
 Estatístca Descrtva Exercíco 1. Caderno de Exercícos Resolvdos A fgura segunte representa, através de um polígono ntegral, a dstrbução do rendmento nas famílas dos alunos de duas turmas. 1,,75 Turma B
Estatístca Descrtva Exercíco 1. Caderno de Exercícos Resolvdos A fgura segunte representa, através de um polígono ntegral, a dstrbução do rendmento nas famílas dos alunos de duas turmas. 1,,75 Turma B
GENETIC FUZZY SISTEM PARA SELEÇÃO DE POÇOS DE PETRÓLEO PARA FRATURAMENTO HIDRÁULICO
 A pesqusa Operaconal e os Recursos Renováves 4 a 7 de novembro de 2003, Natal-RN GENETIC FUZZY SISTEM PARA SELEÇÃO DE POÇOS DE PETRÓLEO PARA FRATURAMENTO HIDRÁULICO Antôno Orestes de Salvo Castro Petrobras
A pesqusa Operaconal e os Recursos Renováves 4 a 7 de novembro de 2003, Natal-RN GENETIC FUZZY SISTEM PARA SELEÇÃO DE POÇOS DE PETRÓLEO PARA FRATURAMENTO HIDRÁULICO Antôno Orestes de Salvo Castro Petrobras
Medidas de tendência central. Média Aritmética. 4ª aula 2012
 Estatístca 4ª aula 2012 Meddas de tendênca central Ajudam a conhecer a analsar melhor as característcas de dados colhdos. Chamamos de meddas de tendênca central em decorrênca dos dados observados apresentarem
Estatístca 4ª aula 2012 Meddas de tendênca central Ajudam a conhecer a analsar melhor as característcas de dados colhdos. Chamamos de meddas de tendênca central em decorrênca dos dados observados apresentarem
CAPÍTULO I 1 INTRODUÇÃO
 CAPÍTULO I INTRODUÇÃO No mundo globalzado e etremamente compettvo em que as empresas dsputam espaço, clentes, reconhecmento e acma de tudo, condções de permanecer compettvas e lucratvas no mercado, é fundamental
CAPÍTULO I INTRODUÇÃO No mundo globalzado e etremamente compettvo em que as empresas dsputam espaço, clentes, reconhecmento e acma de tudo, condções de permanecer compettvas e lucratvas no mercado, é fundamental
METROLOGIA E ENSAIOS
 METROLOGIA E ENSAIOS Incerteza de Medção Prof. Aleandre Pedott pedott@producao.ufrgs.br Freqüênca de ocorrênca Incerteza da Medção Dstrbução de freqüênca das meddas Erro Sstemátco (Tendênca) Erro de Repettvdade
METROLOGIA E ENSAIOS Incerteza de Medção Prof. Aleandre Pedott pedott@producao.ufrgs.br Freqüênca de ocorrênca Incerteza da Medção Dstrbução de freqüênca das meddas Erro Sstemátco (Tendênca) Erro de Repettvdade
Elaboração: Novembro/2005
 Elaboração: Novembro/2005 Últma atualzação: 18/07/2011 Apresentação E ste Caderno de Fórmulas tem por objetvo nformar aos usuáros a metodologa e os crtéros de precsão dos cálculos referentes às Cédulas
Elaboração: Novembro/2005 Últma atualzação: 18/07/2011 Apresentação E ste Caderno de Fórmulas tem por objetvo nformar aos usuáros a metodologa e os crtéros de precsão dos cálculos referentes às Cédulas
IX CONGRESSO BRASILEIRO DE ENGENHARIA E CIÊNCIAS TÉRMICAS. 9th BRAZILIAN CONGRESS OF THERMAL ENGINEERING AND SCIENCES
 IX CONGRESSO BRASILEIRO DE ENGENHARIA E CIÊNCIAS TÉRMICAS 9th BRAZILIAN CONGRESS OF THERMAL ENGINEERING AND SCIENCES Paper CIT02-0026 METODOLOGIA PARA CORRELAÇÃO DE DADOS CINÉTICOS ENTRE AS TÉCNICAS DE
IX CONGRESSO BRASILEIRO DE ENGENHARIA E CIÊNCIAS TÉRMICAS 9th BRAZILIAN CONGRESS OF THERMAL ENGINEERING AND SCIENCES Paper CIT02-0026 METODOLOGIA PARA CORRELAÇÃO DE DADOS CINÉTICOS ENTRE AS TÉCNICAS DE
Covariância e Correlação Linear
 TLF 00/ Cap. X Covarânca e correlação lnear Capítulo X Covarânca e Correlação Lnear 0.. Valor médo da grandeza (,) 0 0.. Covarânca na propagação de erros 03 0.3. Coecente de correlação lnear 05 Departamento
TLF 00/ Cap. X Covarânca e correlação lnear Capítulo X Covarânca e Correlação Lnear 0.. Valor médo da grandeza (,) 0 0.. Covarânca na propagação de erros 03 0.3. Coecente de correlação lnear 05 Departamento
Despacho Econômico de. Sistemas Termoelétricos e. Hidrotérmicos
 Despacho Econômco de Sstemas Termoelétrcos e Hdrotérmcos Apresentação Introdução Despacho econômco de sstemas termoelétrcos Despacho econômco de sstemas hdrotérmcos Despacho do sstema braslero Conclusões
Despacho Econômco de Sstemas Termoelétrcos e Hdrotérmcos Apresentação Introdução Despacho econômco de sstemas termoelétrcos Despacho econômco de sstemas hdrotérmcos Despacho do sstema braslero Conclusões
UM ALGORITMO EXATO PARA A OTIMIZAÇÃO DE CARTEIRAS DE INVESTIMENTO COM RESTRIÇÕES DE CARDINALIDADE
 UM ALGORITMO EXATO PARA A OTIMIZAÇÃO DE CARTEIRAS DE INVESTIMENTO COM RESTRIÇÕES DE CARDINALIDADE Dssertação de mestrado em matemátca aplcada fnancada pelo CNPq IMECC - UNICAMP Pedro Ferraz Vllela Prof.
UM ALGORITMO EXATO PARA A OTIMIZAÇÃO DE CARTEIRAS DE INVESTIMENTO COM RESTRIÇÕES DE CARDINALIDADE Dssertação de mestrado em matemátca aplcada fnancada pelo CNPq IMECC - UNICAMP Pedro Ferraz Vllela Prof.
POLARIMETRIA ÓPTICA E MODELAGEM DE POLARES OBSERVADAS NO OPD/LNA NO PERÍODO DE 2010-2012
 5 POLARIMETRIA ÓPTICA E MODELAGEM DE POLARES OBSERVADAS NO OPD/LNA NO PERÍODO DE 00-0 OPTICAL POLARIMETRY AND MODELING OF POLARS OBSERVED IN OPD/LNA IN THE PERIOD 00-0 Karleyne M. G. Slva Cláuda V. Rodrgues
5 POLARIMETRIA ÓPTICA E MODELAGEM DE POLARES OBSERVADAS NO OPD/LNA NO PERÍODO DE 00-0 OPTICAL POLARIMETRY AND MODELING OF POLARS OBSERVED IN OPD/LNA IN THE PERIOD 00-0 Karleyne M. G. Slva Cláuda V. Rodrgues
ESPELHOS E LENTES ESPELHOS PLANOS
 ESPELHOS E LENTES 1 Embora para os povos prmtvos os espelhos tvessem propredades mágcas, orgem de lendas e crendces que estão presentes até hoje, para a físca são apenas superfíces poldas que produzem
ESPELHOS E LENTES 1 Embora para os povos prmtvos os espelhos tvessem propredades mágcas, orgem de lendas e crendces que estão presentes até hoje, para a físca são apenas superfíces poldas que produzem
UM NOVO ALGORITMO GENÉTICO PARA A OTIMIZAÇÃO DE CARTEIRAS DE INVESTIMENTO COM RESTRIÇÕES DE CARDINALIDADE
 Unversdade Estadual de Campnas Insttuto de Matemátca, Estatístca e Computação Centífca Departamento de Matemátca Aplcada DISSERTAÇÃO DE MESTRADO UM NOVO ALGORITMO GENÉTICO PARA A OTIMIZAÇÃO DE CARTEIRAS
Unversdade Estadual de Campnas Insttuto de Matemátca, Estatístca e Computação Centífca Departamento de Matemátca Aplcada DISSERTAÇÃO DE MESTRADO UM NOVO ALGORITMO GENÉTICO PARA A OTIMIZAÇÃO DE CARTEIRAS
Detecção de Microcalcificações de Bordas Lisas e Agrupamentos em Formação, para Auxílio ao Diagnóstico Médico de Câncer de Mama
 Detecção de Mcrocalcfcações de Bordas Lsas e Agrupamentos em Formação, para Auxílo ao Dagnóstco Médco de Câncer de Mama Aledr Slvera Perera, Noran Marrangello,Crstane Sawada Yokota,Káta Harum Nkuma UNESP/IBILCE
Detecção de Mcrocalcfcações de Bordas Lsas e Agrupamentos em Formação, para Auxílo ao Dagnóstco Médco de Câncer de Mama Aledr Slvera Perera, Noran Marrangello,Crstane Sawada Yokota,Káta Harum Nkuma UNESP/IBILCE
Problemas Associados a Cones de Segunda Ordem
 Problemas Assocados a Cones de Segunda Ordem Dense S. Trevsol, Mara A. D. Ehrhardt, Insttuto de Matemátca, Estatístca e Computação Centífca, IMECC, UNICAMP, 1383-859, Campnas, SP E-mal: ra8477@me.uncamp.br,
Problemas Assocados a Cones de Segunda Ordem Dense S. Trevsol, Mara A. D. Ehrhardt, Insttuto de Matemátca, Estatístca e Computação Centífca, IMECC, UNICAMP, 1383-859, Campnas, SP E-mal: ra8477@me.uncamp.br,
2 ANÁLISE ESPACIAL DE EVENTOS
 ANÁLISE ESPACIAL DE EVENTOS Glberto Câmara Marla Sá Carvalho.1 INTRODUÇÃO Neste capítulo serão estudados os fenômenos expressos através de ocorrêncas dentfcadas como pontos localzados no espaço, denomnados
ANÁLISE ESPACIAL DE EVENTOS Glberto Câmara Marla Sá Carvalho.1 INTRODUÇÃO Neste capítulo serão estudados os fenômenos expressos através de ocorrêncas dentfcadas como pontos localzados no espaço, denomnados
Texto 03: Campos Escalares e Vetoriais. Gradiente. Rotacional. Divergência. Campos Conservativos.
 1 Unversdade Salvador UNIFACS Crsos de Engenhara Cálclo IV Profa: Ila Reboças Frere Cálclo Vetoral Teto 03: Campos Escalares e Vetoras. Gradente. Rotaconal. Dvergênca. Campos Conservatvos. Campos Escalares
1 Unversdade Salvador UNIFACS Crsos de Engenhara Cálclo IV Profa: Ila Reboças Frere Cálclo Vetoral Teto 03: Campos Escalares e Vetoras. Gradente. Rotaconal. Dvergênca. Campos Conservatvos. Campos Escalares