Acompanhamento de Cenas com Calibração Automática de Câmeras
|
|
|
- Fábio Bayer Ribeiro
- 5 Há anos
- Visualizações:
Transcrição
1 Acompanhamento de Cenas com Calbração Atomátca de Câmeras por Fláo Szenberg Orentadores: Marcelo Gattass Palo Cezar Pnto Caralho Departamento de Informátca, PUC-Ro 9 de dezembro de 00
2 Jz Vrtal pontos de objetos pontos de referênca
3 Problema Dada ma seqüênca de magens qe apresentam a salzação, total o parcal, de m determnado modelo, acompanhar este modelo, calbrando as câmeras para cada magem de forma atomátca, a fm de sobrepor objetos rtas. Reqstos: Menor nterenção possíel do sáro Processamento em tempo real
4 Modelos Os modelos tlzados na tese: F F 5 F 7 F F 6 F 4 Modelo de m campo de ftebol F 3 F 8 F 9 F 9 F 5 F F 6 F 8 Modelo sem smetra F F 7 F 4 F 3
5 Algortmo básco Imagem A A A3 A4 A5 Fltragem para realce de lnhas Extração de segmentos de retas longos Reconhecmento dos segmentos Cálclo da transformação projeta planar Calbração da câmera
6 Fltragem para realce de lnhas O fltro Laplacano da Gassana (LoG) é aplcado à magem, baseado na lmnânca fltro gassano fltro laplacano

7 Fltragem para realce de lnhas Problemas com lnhas dplas

8 Fltragem para realce de lnhas A transformação negata é aplcada entre o cálclo da lmnânca e o fltro LoG.
9 Fltragem para realce de lnhas Resltado de ma segmentação (threshold) feta na magem fltrada. (em negato para salzar melhor)
10 Extração de segmentos de retas longos O objeto é localzar segmentos de retas longos canddatos a serem lnhas da magem do modelo. O procedmento é dddo em dos passos:. Elmnação de pontos qe não estão sobre nenhm segmento de reta.. Determnação de segmentos de retas.
11 Elmnando pontos qe não estão sobre m segmento de reta A magem é ddda, por ma grade reglar, em céllas retanglares.
12 Elmnando pontos qe não estão sobre m segmento de reta Para cada célla, os atoalores e ( ) da matrz de coarânca, dada abaxo, são calclados. Se = 0 o / > M (dado) então o atoetor de é a dreção predomnante senão a célla não tem ma dreção predomnante n n n n n,
13 Elmnando pontos qe não estão sobre m segmento de reta Podemos atrbr pesos aos pontos (resltado do LoG). n n n n n n n n n n
14 Elmnando pontos qe não estão sobre m segmento de reta Céllas com pontos formando segmentos de retas:
15 Determnando segmentos de reta As céllas são percorrdas de modo qe as lnhas são processadas de baxo para cma e as céllas em cada colna são processadas da esqerda para dreta. Um alor é dado para cada célla: Se não exste ma dreção predomnate na célla, o alor é zero. Caso contráro, erfca-se os três znhos abaxo e o znho à esqerda da célla corrente. Se algm deles tem ma dreção predomnante smlar ao da célla corrente, qando ndos, então a célla corrente recebe o alor da célla qe tem a dreção mas smlar; senão, m noo alor é sado para a célla corrente.


16 Determnando segmentos de reta São formados grpos com céllas de mesmo alor, representados na fgra abaxo por cores dstntas.
17 Extração de segmentos de reta Cada grpo fornece m segmento de reta. A reta de eqação =a+b é encontrada por método de mínmos qadrados: O segmento é obtdo lmtando a reta pela caxa enoltóra dos pontos sados. n n n n n n b a
18 Extração de segmentos de reta Os segmentos de reta qe estão sobre a mesma reta sporte são ndos, formando segmentos longos, sando mínmos qadrados. e a b c No fnal do processo, tem-se m conjnto de segmentos de reta. f d f 7 f 4 f 5 f 6 f 3 f f

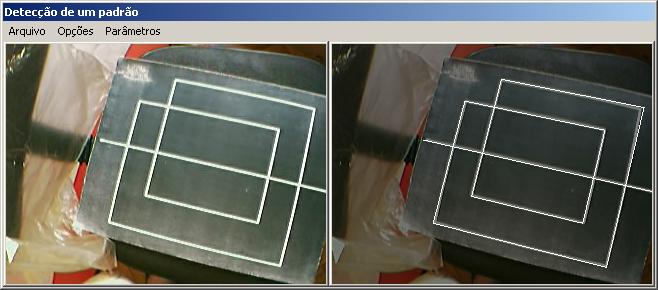
19 Extração de segmentos de reta Sobrepondo as lnhas extraída na magem, temos o segnte resltado:
20 Reconhecmento dos segmentos A partr do conjnto de segmentos, as lnhas do modelo são detectadas e o modelo reconhecdo [Grmson90]. Método baseado na Transformada de Hogh. Método de reconhecmento baseado em modelo. Conjnto de restrções
21 Reconhecmento dos segmentos Método de Reconhecmento baseado em Modelo Modelo f 7 F F 5 F 7 F F 6 F 4 Árore de Interpretação f 4 f 5 f 6 f 3 f F 3 f Vsalzação f : F F 7 F F 3 F 4 F 5 F 6 f : F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7
22 f f f 3 Reconhecmento dos segmentos Dscardando nós F Modelo F 5 F 7 Árore de Interpretação Vsalzação f 4 F F 6 F 4 f 5 f 7 F 3 f 6 f : F F 7 F F 3 F 4 F 5 F 6 f : F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 F F F 3 F 4 F 5 F 6 F 7 O nó {f : F,f :F 6,f 3 :F 3 } é dscardado por qe ola a restrção: f 3 : F F F 3 F 4 F 5 F 6 F 7 A lnha representante de F 6 dee estar entres as lnhas qe representam F e F 3, na salzação.
23 Reconhecmento dos segmentos Problema relaconado com a perspecta ) ( ) ( ) ( ) ( ) )( ( ) )( ( t t t t s s s s t t s s t t s s 0.8
24 Reconhecmento dos segmentos Problema relaconado com a perspecta f 3 f f
25 Reconhecmento dos segmentos Escolhendo a melhor solção F Modelo F 5 F 7 f 7 F F 6 F 4 f 4 f 5 f 6 f 3 f F 3 f Vsalzação Em geral, exstem dersas nterpretações possíes; Escolhemos a nterpretação onde a soma dos comprmentos dos segmentos representatos é máxma. f : F 4 f : F 3 f 3 : f 4 : f 5 : F 6 f 6 : F 7 f 7 : F Vencedor f : F 4 f : f 3 : f 4 : F 3 f 5 : F 6 f 6 : F 7 f 7 : F
26 Reconhecmento dos segmentos f 7 f 4 f 5 f 6 f 3 f f Resltado fnal Vsalzação Modelo F F 5 F 7 F F 6 F 4 F 3 f : F 4 f : F 3 f 3 : f 4 : f 5 : F 6 f 6 : F 7 f 7 : F o Modelo F F 5 F 7 F F 6 F 4 F 3 f : F f : F 3 f 3 : f 4 : f 5 : F 6 f 6 : F 5 f 7 : F
.")
27 Cálclo da transformação projeta planar Uma transformação projeta planar H (homografa) correspondente às lnhas reconhecdas é encontrada (sando pontos de nterseção e pontos de fga como pontos de referênca). pontos de fga H pontos de nterseção Modelo reconstrído
28 Calbração da câmera Modelo de Câmera - pnhole z y x t r t ft r fr t ft r fr s s s z z y z x p~ f Z Y X P ~ ~ C Plano da magem projetada x y z o r r 3 r O magem p P = (x, y, z) p = (, )
29 Calbração da câmera A câmera é calbrada sando método de Tsa para a reconstrção de elementos qe não estão no plano do modelo. Erros de sobreposção
30 Algortmo estenddo Imagem A A A3 B B B3 A4 A5 Fltragem para realce de lnhas Extração de segmentos de retas longos Reconhecmento dos segmentos Cálclo da transformação projeta planar prelmnar Reconstrção da salzação do modelo Reajste das Lnhas Cálclo da transformação projeta planar Calbração da câmera

31 Reajste das lnhas São sadas faxas de tolerânca para descartar pontos dstantes. tolerânca para reajste das lnhas reconstrídas

32 Reajste das lnhas lnha reconstrída pontos da magem faxa de tolerânca noa lnha localzada A noa lnha localzada é obtda pelo método dos mínmos qadrados
33 Reajste das lnhas Resltado do reajste das lnhas:
34 Cálclo da transformação projeta planar Depos do reajste das lnhas do modelo na salzação, ma noa transformação é encontrada e ma noa reconstrção pode ser obtda.
35 Calbração da câmera A câmera é calbrada sando o método de Tsa, com erro de sobreposção acetáel.
36 Trabalhando com ma seqüênca Próxma magem da seqüênca A Fltragem para realce de lnhas B3 Reajste das Lnhas A4 Cálclo da transformação projeta planar A5 Calbração da câmera Para a prmera magem, aplcamos o algortmo proposto por ntero. Para otmzar o processo, da segnda magem em dante, tramos proeto do resltado da magem anteror. A transformação projeta planar fnal da magem anteror é sada como a transformação prelmnar para a magem corrente.
37 Reajste dos segmentos pontos da cena n noo ajste posção do segmento na cena n- posção do segmento na cena n- estmata de posção do segmento para cena n Estmata de posção do segmento na cena n dada sas posções nas cena n- e n-. Faxa de tolerânca sem estmata Faxa de tolerânca com estmata
38 Algortmo proposto Prmera magem da seqüênca Fltragem para realce de lnhas Reajste dos segmentos Extração de segmentos de retas longos Cálclo da transformação projeta planar Reconhecmento dos segmentos Cálclo da transformação projeta planar prelmnar Reconstrção da salzação do modelo Próxma magem da seqüênca Fltragem para realce de lnhas Calbração da câmera
39 Herístca para determnar o lmar de corte sado na segmentação Procra m patamar com alor máxmo no gráfco qe nforma o número de segmentos extraídos para cada alor do lmar de corte. Segmentos extraídos Lmar




40 Resltados Seqüênca real Seqüênca artfcal

41 Resltados

42 Resltados Algortmo ntero Dferença Va acompanhamento


43 Resltados Protótpo para testar o algortmo sando ma câmera 8mm Resltado do algortmo sando a câmera posconada conforme a magem acma:



44 Resltados webcam Sem oclsão Com oclsão

45 Resltados Otro modelo


46 Resltados Onde o algortmo falha Falta de ntdez Sombra parcal
47 Resltados A seqüênca real de teste tem 67 magens Comptador: Pentm III 600MHz Tempo de processamento: 40 mlsegndos Comptador: Pentm 4.7GHz Tempo de processamento: 500 mlsegndos (<< 34 mlsegndos necessáros para processamento em tempo real 30 fps)
48 Resltados (precsão) Pontos do Campo Coordenadas Corretas Coordenadas Reconstrídas x y z Erro 05,0 68,00 0,00 8,707 6,584 8,73 5,97 0,6 88,5 3,84 0,00 30,7 78,33 8,747 77,55,499 88,5 54,6 0,00,36 83,463 0,44 83,97 0,854 99,5 4,84 0,00 59,039 34,06 58,566 33,85 0,64 99,5 43,6 0,00 46,690 74,86 46,067 74,484 0,7 05,0 30,34 0,00 69,87 55,0 69,69 54,697 0,446 05,0 30,34,44 70,9 8,066 70,5 80,863 0,735 05,0 37,66,44 4,0 94,645 3,9 94,407 0,845 05,0 37,66 0,00 3,405 70,7 3,08 69,876 0,50 Erro Médo 0,696 Comparação entre as coordenadas corretas e reconstrídas para a prmera cena.
49 Resltados (precsão) Pontos do Campo Coordenadas Corretas Coordenadas Reconstrídas x y z Erro 05,0 68,00 0,00 97,67 05,940 96,79 05,585 0,57 88,5 3,84 0,00 43,883 66,434 43,549 66,0 0,530 88,5 54,6 0,00 6,0 73,74 5,655 7,63 0,709 99,5 4,84 0,00 73,344 4,09 73,5 3,75 0,38 99,5 43,6 0,00 60,67 64,798 60,366 64,4 0,486 05,0 30,34 0,00 84,60 45,73 83,99 44,94 0,309 05,0 30,34,44 85,4 7,90 84,886 7,090 0,407 05,0 37,66,44 38,7 84,768 37,744 84,538 0,447 05,0 37,66 0,00 37,46 60,349 37,5 60,063 0,355 Erro Médo 0,45 Comparação entre as coordenadas corretas e reconstrídas para ma otra cena.
50 Conclsões A estratéga de ddr a magem em céllas resole bem o problema da extração de segmentos de retas qando a magem contém regões com característcas dersas. Uma boa manera para dentfcar lnhas do modelo na magem é a tlzação do método baseado na árore de nterpretações. Um conjnto de apenas 5 restrções é sfcente. O reajste das lnhas tlzando ma faxa de tolerânca e operando com a magem fltrada e segmentada apresento bons resltados para a noa localzação dos segmentos na seqüênca de qadros. Uma estmata de localzação de segmentos baseada em qadros passados é mportante, podendo condzr a resltados melhores.
51 Conclsões A herístca apresentada para determnar m alor de lmar tlzado no método de segmentação apresento na prátca resltados satsfatóros. O crtéro qe saza a restrção de paralelsmo mostro-se efcente qando exste ma dstorção perspecta na magem. ) ( ) ( ) ( ) ( ) )( ( ) )( ( t t t t s s s s t t s s t t s s
52 Conclsões O algortmo proposto gero bons resltados mesmo qando aplcado às magens com rídos captradas de ma transmssão de TV. O algortmo pode ser sado em comptadores pessoas (nenhm hardware especalzado é necessáro). O tempo de processamento é bem abaxo do necessáro para processamento em tempo real. O tempo extra pode ser sado, por exemplo, para desenhar anúncos o propagandas.
53 Trabalhos ftros Pesqsar otros fltros para realce de lnhas e métodos de segmentação. Obter métodos para determnar o alor do lmar sado na segmentação. Utlzar de forma mas efcente os alores dos pontos da magem resltante do fltro LoG, atraés de fnções de transferênca. Crtéro de paralelsmo: determnar alores para e. Desenoler otras técncas de coletas de pontos para o reajste das lnhas.
54 Trabalhos ftros Inestgar métodos para sazar a seqüênca de câmeras atraés da aplcação do fltro de Kalman. Desenoler técncas para acompanhar otros objetos qe se moem sobre o modelo, tas como bola e jogadores sobre as lnhas do gramado. Desenhar objetos no campo atrás dos jogadores, dando a mpressão de qe os jogadores estão andando sobre eles.




55 Trabalhos ftros Chroma Key
Redes de Petri. Definições:
 Redes de Petr Defnções: Uma Rede de Petr (PN) é m grafo dreto bpartdo o qal tem dos tpos de nós denomnados lgares (qe representam estados) e transções (qe representam eventos). O estado é alterado pelo
Redes de Petr Defnções: Uma Rede de Petr (PN) é m grafo dreto bpartdo o qal tem dos tpos de nós denomnados lgares (qe representam estados) e transções (qe representam eventos). O estado é alterado pelo
7 - Distribuição de Freqüências
 7 - Dstrbução de Freqüêncas 7.1 Introdução Em mutas áreas há uma grande quantdade de nformações numércas que precsam ser dvulgadas de forma resumda. O método mas comum de resumr estes dados numércos consste
7 - Dstrbução de Freqüêncas 7.1 Introdução Em mutas áreas há uma grande quantdade de nformações numércas que precsam ser dvulgadas de forma resumda. O método mas comum de resumr estes dados numércos consste
Tecnologia de Grupo. 1. Justificativa e Importância da Tecnologia de Grupo. 2. Algoritmo de Ordenação Binária. = 1 se a máquina i
 Tecnologa de Grpo 1. Jstfcatva e Iportânca da Tecnologa de Grpo Tecnologa de grpos é conceto portante aplcado na foração de céllas de anfatra. A organzação do sstea de prodção e céllas de anfatra poss
Tecnologa de Grpo 1. Jstfcatva e Iportânca da Tecnologa de Grpo Tecnologa de grpos é conceto portante aplcado na foração de céllas de anfatra. A organzação do sstea de prodção e céllas de anfatra poss
Representação e Descrição de Regiões
 Depos de uma magem ter sdo segmentada em regões é necessáro representar e descrever cada regão para posteror processamento A escolha da representação de uma regão envolve a escolha dos elementos que são
Depos de uma magem ter sdo segmentada em regões é necessáro representar e descrever cada regão para posteror processamento A escolha da representação de uma regão envolve a escolha dos elementos que são
CIRCUITOS RESISTIVOS
 Temátca Crctos Eléctrcos Capítlo nálse de Crctos Lneares CICITOS ESISTIVOS INTODÇÃO Nesta secção apresentamse dversas metodologas para resolção de crctos lneares tas como o método geral, a smplfcação do
Temátca Crctos Eléctrcos Capítlo nálse de Crctos Lneares CICITOS ESISTIVOS INTODÇÃO Nesta secção apresentamse dversas metodologas para resolção de crctos lneares tas como o método geral, a smplfcação do
5 Otimização de Dimensões
 5 Otmzação de Dmensões 5.1 Consderações Geras O desejo de se obter o projeto deal, consderando aspectos relaconados com o consmo, desempeno o efcênca, tas como qantdades mínmas de peso, volme, massa, sempre
5 Otmzação de Dmensões 5.1 Consderações Geras O desejo de se obter o projeto deal, consderando aspectos relaconados com o consmo, desempeno o efcênca, tas como qantdades mínmas de peso, volme, massa, sempre
RAD1507 Estatística Aplicada à Administração I Prof. Dr. Evandro Marcos Saidel Ribeiro
 UNIVERIDADE DE ÃO PAULO FACULDADE DE ECONOMIA, ADMINITRAÇÃO E CONTABILIDADE DE RIBEIRÃO PRETO DEPARTAMENTO DE ADMINITRAÇÃO RAD1507 Estatístca Aplcada à Admnstração I Prof. Dr. Evandro Marcos adel Rbero
UNIVERIDADE DE ÃO PAULO FACULDADE DE ECONOMIA, ADMINITRAÇÃO E CONTABILIDADE DE RIBEIRÃO PRETO DEPARTAMENTO DE ADMINITRAÇÃO RAD1507 Estatístca Aplcada à Admnstração I Prof. Dr. Evandro Marcos adel Rbero
Determinação da Incerteza de Medição na Calibração da Área de Aberturas Circulares RESUMO
 Prodto & Prodção, vol. 11, n. 1, p. 70-79, fev. 010 Edção Metrologa Determnação da Incerteza de Medção na Calbração da Área de bertras Crclares Pedro B. Costa Wellngton S. Barros Insttto Naconal de Metrologa
Prodto & Prodção, vol. 11, n. 1, p. 70-79, fev. 010 Edção Metrologa Determnação da Incerteza de Medção na Calbração da Área de bertras Crclares Pedro B. Costa Wellngton S. Barros Insttto Naconal de Metrologa
EXERCÍCIO: VIA EXPRESSA CONTROLADA
 EXERCÍCIO: VIA EXPRESSA CONTROLADA Engenhara de Tráfego Consdere o segmento de va expressa esquematzado abaxo, que apresenta problemas de congestonamento no pco, e os dados a segur apresentados: Trechos
EXERCÍCIO: VIA EXPRESSA CONTROLADA Engenhara de Tráfego Consdere o segmento de va expressa esquematzado abaxo, que apresenta problemas de congestonamento no pco, e os dados a segur apresentados: Trechos
Processamento de Imagem. Prof. MSc. André Yoshimi Kusumoto
 Processamento de Imagem Prof. MSc. André Yoshm Kusumoto andrekusumoto.unp@gmal.com Operações pontuas globas em magens Uma operação pontual global em uma magem dgtal r é a função f(r) aplcada a todo pxel
Processamento de Imagem Prof. MSc. André Yoshm Kusumoto andrekusumoto.unp@gmal.com Operações pontuas globas em magens Uma operação pontual global em uma magem dgtal r é a função f(r) aplcada a todo pxel
Universidade Federal do Paraná Departamento de Informática. Reconhecimento de Padrões. Classificadores Lineares. Luiz Eduardo S. Oliveira, Ph.D.
 Unversdade Federal do Paraná Departamento de Informátca Reconhecmento de Padrões Classfcadores Lneares Luz Eduardo S. Olvera, Ph.D. http://lesolvera.net Objetvos Introduzr os o conceto de classfcação lnear.
Unversdade Federal do Paraná Departamento de Informátca Reconhecmento de Padrões Classfcadores Lneares Luz Eduardo S. Olvera, Ph.D. http://lesolvera.net Objetvos Introduzr os o conceto de classfcação lnear.
princípios do design i
 prncípos prncípos Gestalt "Exposto ao olhar", "o que é colocado dante dos olhos A Gestalt, ou pscologa da forma, surgu no níco do século XX e trabalha com dos concetos: supersoma e transponbldade. prncípos
prncípos prncípos Gestalt "Exposto ao olhar", "o que é colocado dante dos olhos A Gestalt, ou pscologa da forma, surgu no níco do século XX e trabalha com dos concetos: supersoma e transponbldade. prncípos
Deformações na Notação Indicial
 SEÇÃO DE ENSINO DE ENGENHARIA DE FORTIFICAÇÃO E CONSTRUÇÃO Pós-gradação em Engenhara de Transportes Deformações na Notação Indcal MAJ MONIZ DE ARAGÃO Campo de deslocamentos; Componentes de deformação;
SEÇÃO DE ENSINO DE ENGENHARIA DE FORTIFICAÇÃO E CONSTRUÇÃO Pós-gradação em Engenhara de Transportes Deformações na Notação Indcal MAJ MONIZ DE ARAGÃO Campo de deslocamentos; Componentes de deformação;
Ângulo de Inclinação (rad) [α min α max ] 1 a Camada [360,0 520,0] 2000 X:[-0,2065 0,2065] Velocidade da Onda P (m/s)
![Ângulo de Inclinação (rad) [α min α max ] 1 a Camada [360,0 520,0] 2000 X:[-0,2065 0,2065] Velocidade da Onda P (m/s)](/thumbs/81/84461056.jpg "Ângulo de Inclinação (rad) [α min α max ] 1 a Camada [360,0 520,0] 2000 X:[-0,2065 0,2065] Velocidade da Onda P (m/s)") 4 Estudo de Caso O estudo de caso, para avalar o método de estmação de parâmetros trdmensonal fo realzado em um modelo de referênca de três camadas, e foram realzados os seguntes passos: Descrção do modelo
4 Estudo de Caso O estudo de caso, para avalar o método de estmação de parâmetros trdmensonal fo realzado em um modelo de referênca de três camadas, e foram realzados os seguntes passos: Descrção do modelo
2 Análise de Campos Modais em Guias de Onda Arbitrários
 Análse de Campos Modas em Guas de Onda Arbtráros Neste capítulo serão analsados os campos modas em guas de onda de seção arbtrára. A seção transversal do gua é apromada por um polígono conveo descrto por
Análse de Campos Modas em Guas de Onda Arbtráros Neste capítulo serão analsados os campos modas em guas de onda de seção arbtrára. A seção transversal do gua é apromada por um polígono conveo descrto por
AULA Exercícios. ORTOGONALIDADE EM R N. , o vector u tem norma. O produto interno entre os vector u e v, é
 Note bem: a letra destes apontamentos não dspensa de modo algm a letra atenta da bblografa prncpal da cadera Chama-se a atenção para a mportânca do trabalho pessoal a realzar pelo alno resolvendo os problemas
Note bem: a letra destes apontamentos não dspensa de modo algm a letra atenta da bblografa prncpal da cadera Chama-se a atenção para a mportânca do trabalho pessoal a realzar pelo alno resolvendo os problemas
4 Critérios para Avaliação dos Cenários
 Crtéros para Avalação dos Cenáros É desejável que um modelo de geração de séres sntétcas preserve as prncpas característcas da sére hstórca. Isto quer dzer que a utldade de um modelo pode ser verfcada
Crtéros para Avalação dos Cenáros É desejável que um modelo de geração de séres sntétcas preserve as prncpas característcas da sére hstórca. Isto quer dzer que a utldade de um modelo pode ser verfcada
4 MEDIÇÃO DA POSIÇÃO USANDO VISÃO ESTÉREO
 4 MEDIÇÃO DA POSIÇÃO USANDO VISÃO ESÉREO Este Capítulo descreve o uso de duas câmeras para medr a posção e orentação da base superor do atuador no espaço trdmensonal. Um pequeno objeto trdmensonal é colocado
4 MEDIÇÃO DA POSIÇÃO USANDO VISÃO ESÉREO Este Capítulo descreve o uso de duas câmeras para medr a posção e orentação da base superor do atuador no espaço trdmensonal. Um pequeno objeto trdmensonal é colocado
7 Tratamento dos Dados
 7 Tratamento dos Dados 7.. Coefcentes de Troca de Calor O úmero de usselt local é dado por h( r )d u ( r ) (7-) k onde h(r), o coefcente local de troca de calor é h( r ) q''- perdas T q''- perdas (T( r
7 Tratamento dos Dados 7.. Coefcentes de Troca de Calor O úmero de usselt local é dado por h( r )d u ( r ) (7-) k onde h(r), o coefcente local de troca de calor é h( r ) q''- perdas T q''- perdas (T( r
MÉTODOS DE ANÁLISE DE CIRCUITOS RESISTIVOS ANÁLISE NODAL
 CIRCUITOS ELÉTRICOS Método de Análse: Análse Nodal Dscplna: CIRCUITOS ELÉTRICOS Professor: Dr Marcos Antôno de Sousa Tópco MÉTODOS DE ANÁLISE DE CIRCUITOS RESISTIVOS ANÁLISE NODAL Referênca bbloráfca básca:
CIRCUITOS ELÉTRICOS Método de Análse: Análse Nodal Dscplna: CIRCUITOS ELÉTRICOS Professor: Dr Marcos Antôno de Sousa Tópco MÉTODOS DE ANÁLISE DE CIRCUITOS RESISTIVOS ANÁLISE NODAL Referênca bbloráfca básca:
2 - Derivadas parciais
 8 - ervadas parcas Sea por eemplo: Estma-se qe a prodção semanal de ma ábrca sea dada pela nção Q 00 500 ndades onde representa o número de operáros qalcados e representa o número dos não-qalcados. Atalmente
8 - ervadas parcas Sea por eemplo: Estma-se qe a prodção semanal de ma ábrca sea dada pela nção Q 00 500 ndades onde representa o número de operáros qalcados e representa o número dos não-qalcados. Atalmente
3 Elementos de modelagem para o problema de controle de potência
 3 Elementos de modelagem para o problema de controle de potênca Neste trabalho assume-se que a rede de comuncações é composta por uma coleção de enlaces consttuídos por um par de undades-rádo ndvdualmente
3 Elementos de modelagem para o problema de controle de potênca Neste trabalho assume-se que a rede de comuncações é composta por uma coleção de enlaces consttuídos por um par de undades-rádo ndvdualmente
UNIVERSIDADE ESTADUAL PAULISTA. Faculdade de Ciências e Tecnologia EDINÉIA APARECIDA DOS SANTOS
 nesp UNIVERSIDADE ESTADUAL PAULISTA Facldade de Cêncas e Tecnologa Programa de Pós-Gradação em Cêncas Cartográfcas EDINÉIA APARECIDA DOS SANTOS UTILIZAÇÃO DE EQUAÇÕES DIFERENCIAIS PARCIAIS NO TRATAMENTO
nesp UNIVERSIDADE ESTADUAL PAULISTA Facldade de Cêncas e Tecnologa Programa de Pós-Gradação em Cêncas Cartográfcas EDINÉIA APARECIDA DOS SANTOS UTILIZAÇÃO DE EQUAÇÕES DIFERENCIAIS PARCIAIS NO TRATAMENTO
SOLUÇÃO DO PROBLEMA INVERSO DA TOMOGRAFIA POR IMPEDÂNCIA ELÉTRICA UTILIZANDO O SIMULATED ANNEALING: UMA NOVA ABORDAGEM.
 Pontfíca Unversdade Católca do Ro Grande do Sl FACULDADE DE ENGENHARIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA E TECNOLOGIA DE MATERIAIS SOLUÇÃO DO PROBLEMA INVERSO DA TOMOGRAFIA POR IMPEDÂNCIA ELÉTRICA
Pontfíca Unversdade Católca do Ro Grande do Sl FACULDADE DE ENGENHARIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA E TECNOLOGIA DE MATERIAIS SOLUÇÃO DO PROBLEMA INVERSO DA TOMOGRAFIA POR IMPEDÂNCIA ELÉTRICA
POSICIONAMENTO ABSOLUTO E DIFERENCIAL EM TEMPO REAL PARA NAVEGAÇÃO VIA GPS. HÉLIO KOITI KUGA INPE DMC
 Sére Arqmedes Volme 2 Anas do DINCON 2003 pp. 622-635 2º Congresso Temátco de Aplcações de Dnâmca e Controle da Socedade Braslera de Matemátca Aplcada e Comptaconal (SBMAC). São José dos Campos SP Brasl
Sére Arqmedes Volme 2 Anas do DINCON 2003 pp. 622-635 2º Congresso Temátco de Aplcações de Dnâmca e Controle da Socedade Braslera de Matemátca Aplcada e Comptaconal (SBMAC). São José dos Campos SP Brasl
3. CIRCUITOS COM AMPOP S UTILIZADOS NOS SAPS
 3 CICUITOS COM AMPOP S UTILIZADOS NOS SAPS 3. CICUITOS COM AMPOP S UTILIZADOS NOS SAPS - 3. - 3. Introdução Numa prmera fase, apresenta-se os crcutos somadores e subtractores utlzados nos blocos de entrada
3 CICUITOS COM AMPOP S UTILIZADOS NOS SAPS 3. CICUITOS COM AMPOP S UTILIZADOS NOS SAPS - 3. - 3. Introdução Numa prmera fase, apresenta-se os crcutos somadores e subtractores utlzados nos blocos de entrada
Exemplos. representado a seguir, temos que: são positivas. são negativas. i
 6 Prodto Vetoral Para defnrmos o prodto etoral entre dos etores é ndspensáel dstngrmos o qe são bases postas e bases negatas Para sso consderemos ma base do espaço { } e m obserador Este obserador dee
6 Prodto Vetoral Para defnrmos o prodto etoral entre dos etores é ndspensáel dstngrmos o qe são bases postas e bases negatas Para sso consderemos ma base do espaço { } e m obserador Este obserador dee
TABELAS E GRÁFICOS PARA VARIÁVEIS ALEATÓRIAS QUANTITATIVAS CONTÍNUAS
 TABELAS E GRÁFICOS PARA VARIÁVEIS ALEATÓRIAS QUANTITATIVAS CONTÍNUAS Varável Qualquer característca assocada a uma população Classfcação de varáves Qualtatva { Nomnal sexo, cor dos olhos Ordnal Classe
TABELAS E GRÁFICOS PARA VARIÁVEIS ALEATÓRIAS QUANTITATIVAS CONTÍNUAS Varável Qualquer característca assocada a uma população Classfcação de varáves Qualtatva { Nomnal sexo, cor dos olhos Ordnal Classe
Posicionamento estático por dupla diferença de receptores GPS em tempo real
 Posconamento estátco por dpla dferença de receptores GPS em tempo real Leandro Baron leandroaron@yahoo.com.r Hélo ot ga h@dem.npe.r Dvsão de ecânca Espacal e Controle, Insttto Naconal de Pesqsas Espacas,
Posconamento estátco por dpla dferença de receptores GPS em tempo real Leandro Baron leandroaron@yahoo.com.r Hélo ot ga h@dem.npe.r Dvsão de ecânca Espacal e Controle, Insttto Naconal de Pesqsas Espacas,
Roteiro-Relatório da Experiência N o 4 CARACTERÍSTICAS DO TRANSISTOR BIPOLAR
 PROF.: Joaqum Rangel Codeço Rotero-Relatóro da Experênca N o 4 CARACTERÍSTICAS DO TRANSISTOR BIPOLAR 1. COMPONENTES DA EQUIPE: ALUNOS 1 2 NOTA Prof.: Joaqum Rangel Codeço Data: / / : hs 2. OBJETIVOS: 2.1.
PROF.: Joaqum Rangel Codeço Rotero-Relatóro da Experênca N o 4 CARACTERÍSTICAS DO TRANSISTOR BIPOLAR 1. COMPONENTES DA EQUIPE: ALUNOS 1 2 NOTA Prof.: Joaqum Rangel Codeço Data: / / : hs 2. OBJETIVOS: 2.1.
CONTROLADORES FUZZY. Um sistema de controle típico é representado pelo diagrama de blocos abaixo:
 CONTROLADORES FUZZY Um sstema de controle típco é representado pelo dagrama de blocos abaxo: entrada ou referênca - erro CONTROLADOR snal de controle PLANTA saída A entrada ou referênca expressa a saída
CONTROLADORES FUZZY Um sstema de controle típco é representado pelo dagrama de blocos abaxo: entrada ou referênca - erro CONTROLADOR snal de controle PLANTA saída A entrada ou referênca expressa a saída
3 Subtração de Fundo Segmentação por Subtração de Fundo
 3 Subtração de Fundo Este capítulo apresenta um estudo sobre algortmos para a detecção de objetos em movmento em uma cena com fundo estátco. Normalmente, estas cenas estão sob a nfluênca de mudanças na
3 Subtração de Fundo Este capítulo apresenta um estudo sobre algortmos para a detecção de objetos em movmento em uma cena com fundo estátco. Normalmente, estas cenas estão sob a nfluênca de mudanças na
DISTRIBUIÇÃO DE FREQUÊNCIAS
 Núcleo das Cêncas Bológcas e da Saúde Cursos de Bomedcna, Ed. Físca, Enermagem, Farmáca, Fsoterapa, Fonoaudologa, Medcna Veternára, Muscoterapa, Odontologa, Pscologa DISTRIBUIÇÃO DE FREQUÊNCIAS 5 5. DISTRIBUIÇÃO
Núcleo das Cêncas Bológcas e da Saúde Cursos de Bomedcna, Ed. Físca, Enermagem, Farmáca, Fsoterapa, Fonoaudologa, Medcna Veternára, Muscoterapa, Odontologa, Pscologa DISTRIBUIÇÃO DE FREQUÊNCIAS 5 5. DISTRIBUIÇÃO
Métodos de Ordenação Parte 1
 Métodos de Ordenação Parte 1 SCC-214 Proeto de Algortmos Prof. Thago A. S. Pardo Baseado no materal do Prof. Rudne Goularte O Problema da Ordenação Ordenação (ou classfcação) é largamente utlzada Lstas
Métodos de Ordenação Parte 1 SCC-214 Proeto de Algortmos Prof. Thago A. S. Pardo Baseado no materal do Prof. Rudne Goularte O Problema da Ordenação Ordenação (ou classfcação) é largamente utlzada Lstas
Figura 8.1: Distribuição uniforme de pontos em uma malha uni-dimensional. A notação empregada neste capítulo para avaliação da derivada de uma
 Capítulo 8 Dferencação Numérca Quase todos os métodos numércos utlzados atualmente para obtenção de soluções de equações erencas ordnáras e parcas utlzam algum tpo de aproxmação para as dervadas contínuas
Capítulo 8 Dferencação Numérca Quase todos os métodos numércos utlzados atualmente para obtenção de soluções de equações erencas ordnáras e parcas utlzam algum tpo de aproxmação para as dervadas contínuas
( AB ) é o segmento orientado com origem em A e extremidade em B.
 é o segmento orientado com origem em A e extremidade em B.") FUNDÇÃO EDUIONL UNIFID MPOGRNDENSE (FEU) FULDDES INTEGRDS MPO-GRNDENSES (FI) OORDENÇÃO DE MTEMÁTI Estrada da aroba, 685, ampo-grande/rj - Tel: 3408-8450 Sites: www.fec.br, www.sites.google.com/site/feumat
FUNDÇÃO EDUIONL UNIFID MPOGRNDENSE (FEU) FULDDES INTEGRDS MPO-GRNDENSES (FI) OORDENÇÃO DE MTEMÁTI Estrada da aroba, 685, ampo-grande/rj - Tel: 3408-8450 Sites: www.fec.br, www.sites.google.com/site/feumat
CONCEITOS INICIAIS DE ESTATÍSTICA MÓDULO 2 DISTRIBUIÇÃO DE FREQÜÊNCIA - ELEMENTOS Prof. Rogério Rodrigues
 CONCEITOS INICIAIS DE ESTATÍSTICA MÓDULO DISTRIBUIÇÃO DE FREQÜÊNCIA - ELEMENTOS Prof. Rogéro Rodrgues I) TABELA PRIMITIVA E DISTRIBUIÇÃO DE FREQÜÊNCIA : No processo de amostragem, a forma de regstro mas
CONCEITOS INICIAIS DE ESTATÍSTICA MÓDULO DISTRIBUIÇÃO DE FREQÜÊNCIA - ELEMENTOS Prof. Rogéro Rodrgues I) TABELA PRIMITIVA E DISTRIBUIÇÃO DE FREQÜÊNCIA : No processo de amostragem, a forma de regstro mas
METODOLOGIA PARA O CÁLCULO DE VAZÃO DE UMA SEÇÃO TRANSVERSAL A UM CANAL FLUVIAL. Iran Carlos Stalliviere Corrêa RESUMO
 Semnáro Anual de Pesqusas Geodéscas na UFRGS, 2. 2007. UFRGS METODOLOGIA PARA O CÁLCULO DE VAZÃO DE UMA SEÇÃO TRANSVERSAL A UM CANAL FLUVIAL Iran Carlos Stallvere Corrêa Insttuto de Geocêncas UFRGS Departamento
Semnáro Anual de Pesqusas Geodéscas na UFRGS, 2. 2007. UFRGS METODOLOGIA PARA O CÁLCULO DE VAZÃO DE UMA SEÇÃO TRANSVERSAL A UM CANAL FLUVIAL Iran Carlos Stallvere Corrêa Insttuto de Geocêncas UFRGS Departamento
3.6. Análise descritiva com dados agrupados Dados agrupados com variáveis discretas
 3.6. Análse descrtva com dados agrupados Em algumas stuações, os dados podem ser apresentados dretamente nas tabelas de frequêncas. Netas stuações devemos utlzar estratégas específcas para obter as meddas
3.6. Análse descrtva com dados agrupados Em algumas stuações, os dados podem ser apresentados dretamente nas tabelas de frequêncas. Netas stuações devemos utlzar estratégas específcas para obter as meddas
05/08/2014. RM = (RB ± IM) unidade. Como usar as informações disponíveis sobre o processo de medição e escrever corretamente o resultado da medição?
 unidade. Como usar as informações disponíveis sobre o processo de medição e escrever corretamente o resultado da medição?") 6 Resltados de Medições Diretas Fndamentos da Metrologia Científica e Indstrial Slides do livrofmci Motivação definição do mensrando procedimento de medição resltado da medição condições ambientais operador
6 Resltados de Medições Diretas Fndamentos da Metrologia Científica e Indstrial Slides do livrofmci Motivação definição do mensrando procedimento de medição resltado da medição condições ambientais operador
FUNDAMENTOS DE ROBÓTICA. Modelo Cinemático de Robôs Manipuladores
 FUNDMENTOS DE ROBÓTIC Modelo Cnemátco de Robôs Manpuladores Modelo Cnemátco de Robôs Manpuladores Introdução Modelo Cnemátco Dreto Modelo Cnemátco de um Robô de GDL Representação de Denavt-Hartenberg Exemplos
FUNDMENTOS DE ROBÓTIC Modelo Cnemátco de Robôs Manpuladores Modelo Cnemátco de Robôs Manpuladores Introdução Modelo Cnemátco Dreto Modelo Cnemátco de um Robô de GDL Representação de Denavt-Hartenberg Exemplos
Curso Técnico em Informática. Eletricidade
 Curso Técnco em Informátca Eletrcdade Eletrcdade Aula_0 segundo Bmestre Intensdade do Vetor B Condutor Retlíneo A ntensdade do vetor B, produzdo por um condutor retlíneo pode ser determnada pela Le de
Curso Técnco em Informátca Eletrcdade Eletrcdade Aula_0 segundo Bmestre Intensdade do Vetor B Condutor Retlíneo A ntensdade do vetor B, produzdo por um condutor retlíneo pode ser determnada pela Le de
Processamento de Imagem. Prof. MSc. André Yoshimi Kusumoto
 Processamento de Imagem Prof. MSc. André Yoshm Kusumoto andrekusumoto.unp@gmal.com Prof. André Y. Kusumoto andrekusumoto.unp@gmal.com Operações pontuas globas em magens Uma operação pontual global em uma
Processamento de Imagem Prof. MSc. André Yoshm Kusumoto andrekusumoto.unp@gmal.com Prof. André Y. Kusumoto andrekusumoto.unp@gmal.com Operações pontuas globas em magens Uma operação pontual global em uma
Determinante Introdução. Algumas Propriedades Definição Algébrica Equivalências Propriedades Fórmula Matriz
 ao erminante Área e em R 2 O qe é? Qais são sas propriedades? Como se calcla (Qal é a fórmla o algoritmo para o cálclo)? Para qe sere? A = matriz. P paralelogramo com arestas e. + A é a área (com sinal)
ao erminante Área e em R 2 O qe é? Qais são sas propriedades? Como se calcla (Qal é a fórmla o algoritmo para o cálclo)? Para qe sere? A = matriz. P paralelogramo com arestas e. + A é a área (com sinal)
Estatística II Antonio Roque Aula 18. Regressão Linear
 Estatístca II Antono Roque Aula 18 Regressão Lnear Quando se consderam duas varáves aleatóras ao mesmo tempo, X e Y, as técncas estatístcas aplcadas são as de regressão e correlação. As duas técncas estão
Estatístca II Antono Roque Aula 18 Regressão Lnear Quando se consderam duas varáves aleatóras ao mesmo tempo, X e Y, as técncas estatístcas aplcadas são as de regressão e correlação. As duas técncas estão
5 Relação entre Análise Limite e Programação Linear 5.1. Modelo Matemático para Análise Limite
 5 Relação entre Análse Lmte e Programação Lnear 5.. Modelo Matemátco para Análse Lmte Como fo explcado anterormente, a análse lmte oferece a facldade para o cálculo da carga de ruptura pelo fato de utlzar
5 Relação entre Análse Lmte e Programação Lnear 5.. Modelo Matemátco para Análse Lmte Como fo explcado anterormente, a análse lmte oferece a facldade para o cálculo da carga de ruptura pelo fato de utlzar
CAPÍTULO 2 DESCRIÇÃO DE DADOS ESTATÍSTICA DESCRITIVA
 CAPÍTULO DESCRIÇÃO DE DADOS ESTATÍSTICA DESCRITIVA. A MÉDIA ARITMÉTICA OU PROMÉDIO Defnção: é gual a soma dos valores do grupo de dados dvdda pelo número de valores. X x Soma dos valores de x número de
CAPÍTULO DESCRIÇÃO DE DADOS ESTATÍSTICA DESCRITIVA. A MÉDIA ARITMÉTICA OU PROMÉDIO Defnção: é gual a soma dos valores do grupo de dados dvdda pelo número de valores. X x Soma dos valores de x número de
CORRELAÇÃO E REGRESSÃO
 CORRELAÇÃO E REGRESSÃO Constata-se, freqüentemente, a estênca de uma relação entre duas (ou mas) varáves. Se tal relação é de natureza quanttatva, a correlação é o nstrumento adequado para descobrr e medr
CORRELAÇÃO E REGRESSÃO Constata-se, freqüentemente, a estênca de uma relação entre duas (ou mas) varáves. Se tal relação é de natureza quanttatva, a correlação é o nstrumento adequado para descobrr e medr
IMPLEMENTAÇÃO DO MÉTODO DE FATORAÇÃO DE INTEIROS CRIVO QUADRÁTICO
 IMPLEMENTAÇÃO DO MÉTODO DE FATORAÇÃO DE INTEIROS CRIVO QUADRÁTICO Alne de Paula Sanches 1 ; Adrana Betâna de Paula Molgora 1 Estudante do Curso de Cênca da Computação da UEMS, Undade Unverstára de Dourados;
IMPLEMENTAÇÃO DO MÉTODO DE FATORAÇÃO DE INTEIROS CRIVO QUADRÁTICO Alne de Paula Sanches 1 ; Adrana Betâna de Paula Molgora 1 Estudante do Curso de Cênca da Computação da UEMS, Undade Unverstára de Dourados;
Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA
 Cálclo Vetoral / Ila Reboças Frere / DMAT UFBA. Campos Escalares e Vetoras. Gradente. Rotaconal. Dvergênca. Campos Conservatvos..1 Campos Escalares e Vetoras Dada ma regão D do espaço podemos asocar a
Cálclo Vetoral / Ila Reboças Frere / DMAT UFBA. Campos Escalares e Vetoras. Gradente. Rotaconal. Dvergênca. Campos Conservatvos..1 Campos Escalares e Vetoras Dada ma regão D do espaço podemos asocar a
3 Método Numérico. 3.1 Discretização da Equação Diferencial
 3 Método Numérco O presente capítulo apresenta a dscretação da equação dferencal para o campo de pressão e a ntegração numérca da expressão obtda anterormente para a Vscosdade Newtonana Equvalente possbltando
3 Método Numérco O presente capítulo apresenta a dscretação da equação dferencal para o campo de pressão e a ntegração numérca da expressão obtda anterormente para a Vscosdade Newtonana Equvalente possbltando
É o grau de associação entre duas ou mais variáveis. Pode ser: correlacional ou experimental.
 Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Numa relação expermental os valores de uma das
Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Numa relação expermental os valores de uma das
3 IMPLEMENTAÇÃO DO MÉTODO DE ELEMENTOS FINITOS
 3 IMPLEMENAÇÃO DO MÉODO DE ELEMENOS FINIOS 3 Formlação araconal e Prncípo dos rabalhos rtas Desde o adento de sa tlzação em escala prodta, o Método de Elementos Fntos MEF tem se mostrado de grande mportânca
3 IMPLEMENAÇÃO DO MÉODO DE ELEMENOS FINIOS 3 Formlação araconal e Prncípo dos rabalhos rtas Desde o adento de sa tlzação em escala prodta, o Método de Elementos Fntos MEF tem se mostrado de grande mportânca
4.1. Medidas de Posição da amostra: média, mediana e moda
 4. Meddas descrtva para dados quanttatvos 4.1. Meddas de Posção da amostra: méda, medana e moda Consdere uma amostra com n observações: x 1, x,..., x n. a) Méda: (ou méda artmétca) é representada por x
4. Meddas descrtva para dados quanttatvos 4.1. Meddas de Posção da amostra: méda, medana e moda Consdere uma amostra com n observações: x 1, x,..., x n. a) Méda: (ou méda artmétca) é representada por x
INF 1771 Inteligência Artificial
 INF 77 Intelgênca Artfcal Aula 8 Redes Neuras Edrle Soares de Lma Formas de Aprendzado Aprendzado Supervsonado Árvores de decsão. K-Nearest Neghbor (KNN). Support Vector Machnes (SVM).
INF 77 Intelgênca Artfcal Aula 8 Redes Neuras Edrle Soares de Lma Formas de Aprendzado Aprendzado Supervsonado Árvores de decsão. K-Nearest Neghbor (KNN). Support Vector Machnes (SVM).
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA ELETRÔNICA 1 - ET74C Prof.ª Elisabete Nakoneczny Moraes
 UNERSDADE ENOLÓGA FEDERAL DO PARANÁ DEPARAMENO AADÊMO DE ELEROÉNA ELERÔNA 1 - E74 Prof.ª Elsabete Nakoneczny Moraes Aula 16 J modelo elétrco -Híbrdo e urtba, 12 mao de 2017. ONEÚDO DA AULA 1. RESÃO 2.
UNERSDADE ENOLÓGA FEDERAL DO PARANÁ DEPARAMENO AADÊMO DE ELEROÉNA ELERÔNA 1 - E74 Prof.ª Elsabete Nakoneczny Moraes Aula 16 J modelo elétrco -Híbrdo e urtba, 12 mao de 2017. ONEÚDO DA AULA 1. RESÃO 2.
Aprendizagem de Máquina
 Plano de Aula Aprendzagem de Máquna Aula 4 Alessandro L. Koerch Aprendzagem Bayesana Introdução Teorema de Bayes e Aprendzagem Concetual Classfcador Ótmo de Bayes Algortmo de Gbbs Classfcador Naïe Bayes
Plano de Aula Aprendzagem de Máquna Aula 4 Alessandro L. Koerch Aprendzagem Bayesana Introdução Teorema de Bayes e Aprendzagem Concetual Classfcador Ótmo de Bayes Algortmo de Gbbs Classfcador Naïe Bayes
Métodos de Ordenação Parte 1
 Métodos de Ordenação Parte 1 Introdução à Cênca da Computação II Prof. Dego Raphael Amanco Baseado no materal dos Profs. Rudne Goularte e Thago A. S. Pardo O Problema da Ordenação Ordenação (ou classfcação)
Métodos de Ordenação Parte 1 Introdução à Cênca da Computação II Prof. Dego Raphael Amanco Baseado no materal dos Profs. Rudne Goularte e Thago A. S. Pardo O Problema da Ordenação Ordenação (ou classfcação)
Imagem Digital MINUTA 1. Imagem Digital
 Imagem Dgtal MINUTA Imagem Dgtal Depos da cor, o segndo elemento ndamental da Comptação Gráca é a Imagem Dgtal. Mas, antes de dsctrmos a versão dgtal, vamos concetar melhor o qe entendemos por magem. No
Imagem Dgtal MINUTA Imagem Dgtal Depos da cor, o segndo elemento ndamental da Comptação Gráca é a Imagem Dgtal. Mas, antes de dsctrmos a versão dgtal, vamos concetar melhor o qe entendemos por magem. No
3 Algoritmo de Busca Tabu
 3 Algortmo de Busca Tabu 3.1 Introdução A forma básca do algortmo de Busca Tabu está fundamentada nas déas propostas em [Glover Laguna, 1997] e é baseado em procedmentos heurístcos que permtem explorar
3 Algortmo de Busca Tabu 3.1 Introdução A forma básca do algortmo de Busca Tabu está fundamentada nas déas propostas em [Glover Laguna, 1997] e é baseado em procedmentos heurístcos que permtem explorar
Tópicos Especiais de Álgebra Linear Tema # 1: Aprendendo a trabalhar com o Derive. Introdução ao Derive
 Tópcos Especas de Álgebra Lnear Tema # : Aprendendo a trabalhar com o Derve Assunto: Introdução ao Derve. Ambente Algébrco e Gráfco. Comandos da Álgebra de Matrzes. Determnantes, Inversa de uma Matrz.
Tópcos Especas de Álgebra Lnear Tema # : Aprendendo a trabalhar com o Derve Assunto: Introdução ao Derve. Ambente Algébrco e Gráfco. Comandos da Álgebra de Matrzes. Determnantes, Inversa de uma Matrz.
Introdução. Introdução. Introdução I - PERCEPTRON. Modelos de Neurônios LABIC. Neurônio:
 Modelos de Neurônos Introdução Característcas Báscas Modelo de Neurôno Estrutura da Rede Neurôno: Cada neurôno é composto por: dendrtos: con de termnas de entrada corpo central Algortmo de Aprendzado axôno:
Modelos de Neurônos Introdução Característcas Báscas Modelo de Neurôno Estrutura da Rede Neurôno: Cada neurôno é composto por: dendrtos: con de termnas de entrada corpo central Algortmo de Aprendzado axôno:
PROF. DR. JACQUES FACON
 1 PUCPR- Pontfíca Unersdade Católca Do Paraná PPGIA- Programa de Pós-Graduação Em Informátca Aplcada PRF. DR. JACQUES FACN LIMIARIZAÇÃ FUZZY C MEANS Resumo: Este artgo descree não só a teora, mas também
1 PUCPR- Pontfíca Unersdade Católca Do Paraná PPGIA- Programa de Pós-Graduação Em Informátca Aplcada PRF. DR. JACQUES FACN LIMIARIZAÇÃ FUZZY C MEANS Resumo: Este artgo descree não só a teora, mas também
Redes Neurais (Inteligência Artificial)
") Redes Neuras (Intelgênca Artfcal) Aula 14 Redes Neuras Edrle Soares de Lma Formas de Aprendzado Aprendzado Supervsonado Árvores de Decsão. K-Nearest Neghbor (KNN). Support Vector Machnes
Redes Neuras (Intelgênca Artfcal) Aula 14 Redes Neuras Edrle Soares de Lma Formas de Aprendzado Aprendzado Supervsonado Árvores de Decsão. K-Nearest Neghbor (KNN). Support Vector Machnes
CIRCUITO LINEAR Um circuito linear é aquele que obedece ao princípio da sobreposição:
 . Crcutos não lneares.. Introdução... Defnção de crcuto lnear CIRCUITO LINEAR Um crcuto lnear é aquele que obedece ao prncípo da sobreposção: y f (x) Se x for a entrada do crcuto e y a saída Consderando
. Crcutos não lneares.. Introdução... Defnção de crcuto lnear CIRCUITO LINEAR Um crcuto lnear é aquele que obedece ao prncípo da sobreposção: y f (x) Se x for a entrada do crcuto e y a saída Consderando
PUCPR- Pontifícia Universidade Católica Do Paraná PPGIA- Programa de Pós-Graduação Em Informática Aplicada PROF. DR. JACQUES FACON
 1 PUCPR- Pontfíca Unversdade Católca Do Paraná PPGIA- Programa de Pós-Graduação Em Informátca Aplcada PROF. DR. JACQUES FACON LIMIARIZAÇÃO ITERATIVA DE LAM E LEUNG Resumo: A proposta para essa sére de
1 PUCPR- Pontfíca Unversdade Católca Do Paraná PPGIA- Programa de Pós-Graduação Em Informátca Aplcada PROF. DR. JACQUES FACON LIMIARIZAÇÃO ITERATIVA DE LAM E LEUNG Resumo: A proposta para essa sére de
Módulo I Ondas Planas. Reflexão e Transmissão com incidência normal Reflexão e Transmissão com incidência oblíqua
 Módulo I Ondas Planas Reflexão e Transmssão com ncdênca normal Reflexão e Transmssão com ncdênca oblíqua Equações de Maxwell Teorema de Poyntng Reflexão e Transmssão com ncdênca normal Temos consderado
Módulo I Ondas Planas Reflexão e Transmssão com ncdênca normal Reflexão e Transmssão com ncdênca oblíqua Equações de Maxwell Teorema de Poyntng Reflexão e Transmssão com ncdênca normal Temos consderado
Otimização de Perdas Elétricas em Alimentadores da CELG através da Alocação de Capacitores via Algoritmos Genéticos
 XIII Semnáro Naconal de Dstrbção de Energa Elétrca SENDI 008-06 a 0 de otbro Olnda - Pernambco - rasl Otmzação de Perdas Elétrcas em Almentadores da CELG através da Alocação de Capactores va Algortmos
XIII Semnáro Naconal de Dstrbção de Energa Elétrca SENDI 008-06 a 0 de otbro Olnda - Pernambco - rasl Otmzação de Perdas Elétrcas em Almentadores da CELG através da Alocação de Capactores va Algortmos
Algarismos Significativos Propagação de Erros ou Desvios
 Algarsmos Sgnfcatvos Propagação de Erros ou Desvos L1 = 1,35 cm; L = 1,3 cm; L3 = 1,30 cm L4 = 1,4 cm; L5 = 1,7 cm. Qual destas meddas está correta? Qual apresenta algarsmos com sgnfcado? O nstrumento
Algarsmos Sgnfcatvos Propagação de Erros ou Desvos L1 = 1,35 cm; L = 1,3 cm; L3 = 1,30 cm L4 = 1,4 cm; L5 = 1,7 cm. Qual destas meddas está correta? Qual apresenta algarsmos com sgnfcado? O nstrumento
COMPUTAÇÃO GRÁFICA NOTAS COMPLEMENTARES
 Uniersidade Estadal do Oeste do Paraná - UNIOESTE Centro de Ciências Eatas e Tecnológicas - CCET Crso de Ciência da Comptação COMPUTAÇÃO GRÁFICA NOTAS COMPLEMENTARES CASCAVEL - PR 9 SUMÁRIO PRINCÍPIOS
Uniersidade Estadal do Oeste do Paraná - UNIOESTE Centro de Ciências Eatas e Tecnológicas - CCET Crso de Ciência da Comptação COMPUTAÇÃO GRÁFICA NOTAS COMPLEMENTARES CASCAVEL - PR 9 SUMÁRIO PRINCÍPIOS
CÁLCULO DA INCERTEZA DE MEDIÇÃO NA CALIBRAÇÃO DE LUXIMETROS
 METROLOGA-00 Metrologia para a Vida Sociedade Brasileira de Metrologia (SBM) Setembro 0 05, 00, Recife, Pernambco - BRASL CÁLCLO A NCERTEZA E MEÇÃO NA CALBRAÇÃO E LXMETROS José Gil Oliveira, Alfredo Heitor
METROLOGA-00 Metrologia para a Vida Sociedade Brasileira de Metrologia (SBM) Setembro 0 05, 00, Recife, Pernambco - BRASL CÁLCLO A NCERTEZA E MEÇÃO NA CALBRAÇÃO E LXMETROS José Gil Oliveira, Alfredo Heitor
PROVAS DE ACESSO E INGRESSO PARA OS MAIORES DE 23 ANOS
 PROVAS DE ACESSO E INGRESSO PARA OS MAIORES DE ANOS Ano Lectivo: 009 / 00 Folha de Escola onde se realiza esta prova: Data: 6 / 0 / 009 Prova: MATEMÁTICA Nome do Candidato: Docente(s): Docmento de Identificação
PROVAS DE ACESSO E INGRESSO PARA OS MAIORES DE ANOS Ano Lectivo: 009 / 00 Folha de Escola onde se realiza esta prova: Data: 6 / 0 / 009 Prova: MATEMÁTICA Nome do Candidato: Docente(s): Docmento de Identificação
8 - Medidas Descritivas
 8 - Meddas Descrtvas 8. Introdução Ao descrevemos um conjunto de dados por meo de tabelas e gráfcos temos muto mas nformações sobre o comportamento de uma varável do que a própra sére orgnal de dados.
8 - Meddas Descrtvas 8. Introdução Ao descrevemos um conjunto de dados por meo de tabelas e gráfcos temos muto mas nformações sobre o comportamento de uma varável do que a própra sére orgnal de dados.
CAPÍTULO 3 CALIBRAÇÃO DE FASE INTERFEROMÉTRICA
 CAPÍTULO 3 CALIBRAÇÃO DE FASE INTERFEROMÉTRICA 3. Método Utlzando Ponto de Controle O uso de pontos de controle é o meo mas exato para a determnação do offset da fase nterferométrca. Normalmente utlza-se
CAPÍTULO 3 CALIBRAÇÃO DE FASE INTERFEROMÉTRICA 3. Método Utlzando Ponto de Controle O uso de pontos de controle é o meo mas exato para a determnação do offset da fase nterferométrca. Normalmente utlza-se
4 Análise dimensional para determinação da frequência e fator de amplificação do pico máximo
 4 Análise dimensional para determinação da freqência e fator de amplificação do pico máimo A análise cidadosa das eqações qe regem o escoamento pode fornecer informações sobre os parâmetros importantes
4 Análise dimensional para determinação da freqência e fator de amplificação do pico máimo A análise cidadosa das eqações qe regem o escoamento pode fornecer informações sobre os parâmetros importantes
Introdução a Combinatória- Aplicações, parte II
 Introdução a Combnatóra- Aplcações, AULA 7 7.1 Introdução Nesta aula vamos estudar aplcações um pouco dferentes das da aula passada. No caso estudaremos arranjos com repetção, permutações crculares e o
Introdução a Combnatóra- Aplcações, AULA 7 7.1 Introdução Nesta aula vamos estudar aplcações um pouco dferentes das da aula passada. No caso estudaremos arranjos com repetção, permutações crculares e o
Eletrotécnica AULA Nº 1 Introdução
 Eletrotécnca UL Nº Introdução INTRODUÇÃO PRODUÇÃO DE ENERGI ELÉTRIC GERDOR ESTÇÃO ELEVDOR Lnha de Transmssão ESTÇÃO IXDOR Equpamentos Elétrcos Crcuto Elétrco: camnho percorrdo por uma corrente elétrca
Eletrotécnca UL Nº Introdução INTRODUÇÃO PRODUÇÃO DE ENERGI ELÉTRIC GERDOR ESTÇÃO ELEVDOR Lnha de Transmssão ESTÇÃO IXDOR Equpamentos Elétrcos Crcuto Elétrco: camnho percorrdo por uma corrente elétrca
3 Modelagem computacional do escoamento com superfícies livres e deformáveis
 3 Moelagem comptaconal o escoamento com sperfíces lres e eformáes Para resoler o escoamento em processos e reestmentos por Etrsão, se fzeram so o sstema e eqações e Naer-Stokes na forma bmensonal e as
3 Moelagem comptaconal o escoamento com sperfíces lres e eformáes Para resoler o escoamento em processos e reestmentos por Etrsão, se fzeram so o sstema e eqações e Naer-Stokes na forma bmensonal e as
Aprendizagem de Máquina
 Plano de Aula Aprendzagem de Máquna Aprendzagem Baseada em Instâncas Alessandro L. Koerch Introdução Espaço Eucldano Aprendzagem Baseada em Instâncas (ou Modelos Baseados em Dstânca) Regra knn (k vznhos
Plano de Aula Aprendzagem de Máquna Aprendzagem Baseada em Instâncas Alessandro L. Koerch Introdução Espaço Eucldano Aprendzagem Baseada em Instâncas (ou Modelos Baseados em Dstânca) Regra knn (k vznhos
3.3 Ordenação por Heap (Heapsort)
") 3.3 Ordenação por Heap (Heapsort) Heap descendente (max heap ou arvore descendente parcalmente ordenada) de tamanho n é um array que pode ser vsto como uma arvore bnára quase completa de n nós tal que
3.3 Ordenação por Heap (Heapsort) Heap descendente (max heap ou arvore descendente parcalmente ordenada) de tamanho n é um array que pode ser vsto como uma arvore bnára quase completa de n nós tal que
Energia Cinética Média
 TRBLÊNCIA Ala 3 Energa Cnétca Méda A energa cnétca méda do fldo (por ndade de massa) é defnda por: ) ( 1 W V K A eqação de transporte para K pode ser então obtda mltplcando-se a eqação RANS por : P t 1
TRBLÊNCIA Ala 3 Energa Cnétca Méda A energa cnétca méda do fldo (por ndade de massa) é defnda por: ) ( 1 W V K A eqação de transporte para K pode ser então obtda mltplcando-se a eqação RANS por : P t 1
Prof. Lorí Viali, Dr.
 Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Prof. Lorí Val, Dr. UFRG Insttuto de Matemátca
Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Prof. Lorí Val, Dr. UFRG Insttuto de Matemátca
Introdução aos Problemas de Roteirização e Programação de Veículos
 Introdução aos Problemas de Roterzação e Programação de Veículos PNV-2450 André Bergsten Mendes Problema de Programação de Veículos Problema de Programação de Veículos Premssas Os roteros ncam e termnam
Introdução aos Problemas de Roterzação e Programação de Veículos PNV-2450 André Bergsten Mendes Problema de Programação de Veículos Problema de Programação de Veículos Premssas Os roteros ncam e termnam
3 Modelagem da Turbulência
 3 Modelagem da Trblênca Segndo Pomell (1999), solções analítcas e nmércas para problemas de escoamento trblento podem ser consegdas através de város níves de aproxmação, adotando-se maor o menor descrção
3 Modelagem da Trblênca Segndo Pomell (1999), solções analítcas e nmércas para problemas de escoamento trblento podem ser consegdas através de város níves de aproxmação, adotando-se maor o menor descrção
Economia Industrial. Prof. Marcelo Matos. Aula 7
 Economa Industral Prof. Marcelo Matos Aula 7 Concentração de Mercado Resende e Boff [cap 5 de K&H, 2013]; Ferguson e Ferguson cap.3; Meddas de Concentração: característcas Possbldade de classfcar meddas
Economa Industral Prof. Marcelo Matos Aula 7 Concentração de Mercado Resende e Boff [cap 5 de K&H, 2013]; Ferguson e Ferguson cap.3; Meddas de Concentração: característcas Possbldade de classfcar meddas
Análise do Retorno da Educação na Região Norte em 2007: Um Estudo à Luz da Regressão Quantílica.
 Análse do Retorno da Edcação na Regão Norte em 2007: Um Estdo à Lz da Regressão Qantílca. 1 Introdcão Almr Rogéro A. de Soza 1 Jâno Macel da Slva 2 Marnalva Cardoso Macel 3 O debate sobre o relaconamento
Análse do Retorno da Edcação na Regão Norte em 2007: Um Estdo à Lz da Regressão Qantílca. 1 Introdcão Almr Rogéro A. de Soza 1 Jâno Macel da Slva 2 Marnalva Cardoso Macel 3 O debate sobre o relaconamento
2 Experimentos com Mistura
 Modelagem em Expermentos com Mstura e Mstura-Processo Expermentos com Mstura Formulações de Expermentos com Mstura (EM) são freuentemente encontradas nas ndústras uímcas, farmacêutcas, de almentos e em
Modelagem em Expermentos com Mstura e Mstura-Processo Expermentos com Mstura Formulações de Expermentos com Mstura (EM) são freuentemente encontradas nas ndústras uímcas, farmacêutcas, de almentos e em
Cálculo 1 4ª Lista de Exercícios Derivadas
 www.matematiqes.com.br Cálclo 4ª Lista de Eercícios Derivadas ) Calclar as derivadas das epressões abaio, sando as fórmlas de derivação: a) y 4 4 d 4 b) f f c) y d d) y R : d df e) 6 f R : 6 d f) 5 y 4
www.matematiqes.com.br Cálclo 4ª Lista de Eercícios Derivadas ) Calclar as derivadas das epressões abaio, sando as fórmlas de derivação: a) y 4 4 d 4 b) f f c) y d d) y R : d df e) 6 f R : 6 d f) 5 y 4
1. CORRELAÇÃO E REGRESSÃO LINEAR
 1 CORRELAÇÃO E REGREÃO LINEAR Quando deseja-se estudar se exste relação entre duas varáves quanttatvas, pode-se utlzar a ferramenta estatístca da Correlação Lnear mples de Pearson Quando essa correlação
1 CORRELAÇÃO E REGREÃO LINEAR Quando deseja-se estudar se exste relação entre duas varáves quanttatvas, pode-se utlzar a ferramenta estatístca da Correlação Lnear mples de Pearson Quando essa correlação
Capítulo 14. Análise de circuitos. em corrente alternada () () Assim, é possível, escrever as equações para a corrente e tensão no circuito:
 () Assim, é possível, escrever as equações para a corrente e tensão no circuito:") EETôNIA Assm, é possíel, escreer as equações para a corrente e tensão no crcuto: (t) = máx sen (wt 0) e = 0 má x = 240 apítulo 4 π π (t) = máx sen (wt j) e = má x = 4 2 2 Aplca-se, então, a le de Ohm:
EETôNIA Assm, é possíel, escreer as equações para a corrente e tensão no crcuto: (t) = máx sen (wt 0) e = 0 má x = 240 apítulo 4 π π (t) = máx sen (wt j) e = má x = 4 2 2 Aplca-se, então, a le de Ohm:
D- MÉTODO DAS APROXIMAÇÕES SUCESSIVAS
 D- MÉTODO DAS APROXIMAÇÕES SUCESSIVAS O método das apromações sucessvas é um método teratvo que se basea na aplcação de uma fórmula de recorrênca que, sendo satsfetas determnadas condções de convergênca,
D- MÉTODO DAS APROXIMAÇÕES SUCESSIVAS O método das apromações sucessvas é um método teratvo que se basea na aplcação de uma fórmula de recorrênca que, sendo satsfetas determnadas condções de convergênca,
Matemática A. Versão 1. Na sua folha de respostas, indique de forma legível a versão do teste. Teste Intermédio de Matemática A.
 Teste Intermédio de Matemática A Versão Teste Intermédio Matemática A Versão Dração do Teste: 90 mintos 9.0.0.º Ano de Escolaridade Decreto-Lei n.º 74/004, de 6 de Março Na sa folha de respostas, indiqe
Teste Intermédio de Matemática A Versão Teste Intermédio Matemática A Versão Dração do Teste: 90 mintos 9.0.0.º Ano de Escolaridade Decreto-Lei n.º 74/004, de 6 de Março Na sa folha de respostas, indiqe
Professor: Computação Gráfica I. Anselmo Montenegro Conteúdo: - Curvas interativas. Instituto de Computação - UFF
 Comptação Gráfca I Professor: Anselmo Montenegro www.c.ff.br/~anselmo Conteúdo: - Crvas nteratvas Insttto de Comptação - UFF 1 Constrção nteratva de crvas: ntrodção Crvas e sperfíces são objetos matemátcos
Comptação Gráfca I Professor: Anselmo Montenegro www.c.ff.br/~anselmo Conteúdo: - Crvas nteratvas Insttto de Comptação - UFF 1 Constrção nteratva de crvas: ntrodção Crvas e sperfíces são objetos matemátcos
INTRODUÇÃO À PROBABILIDADE. A probabilidade é uma medida da incerteza dos fenômenos. Traduz-se por um número real compreendido de 0 ( zero) e 1 ( um).
 e 1 ( um).") INTRODUÇÃO À PROILIDDE teora das probabldade nada mas é do que o bom senso transformado em cálculo probabldade é o suporte para os estudos de estatístca e expermentação. Exemplos: O problema da concdênca
INTRODUÇÃO À PROILIDDE teora das probabldade nada mas é do que o bom senso transformado em cálculo probabldade é o suporte para os estudos de estatístca e expermentação. Exemplos: O problema da concdênca
Análise Exploratória de Dados
 Análse Exploratóra de Dados Objetvos Análse de duas varáves quanttatvas: traçar dagramas de dspersão, para avalar possíves relações entre as duas varáves; calcular o coefcente de correlação entre as duas
Análse Exploratóra de Dados Objetvos Análse de duas varáves quanttatvas: traçar dagramas de dspersão, para avalar possíves relações entre as duas varáves; calcular o coefcente de correlação entre as duas
3.2. Solução livre de ciclos e solução como uma árvore geradora
 Smplex Para Redes.. Noções Incas O algortmo Smplex para Redes pode ser entenddo como uma especalzação do método Smplex para aplcação em problemas de programação lnear do tpo fluxo de custo mínmo. O Smplex
Smplex Para Redes.. Noções Incas O algortmo Smplex para Redes pode ser entenddo como uma especalzação do método Smplex para aplcação em problemas de programação lnear do tpo fluxo de custo mínmo. O Smplex
PROCEDIMENTO PARA ESCOLHA DA LOCALIZAÇÃO DE UM CENTRO REGIONAL DE DISTRIBUIÇÃO E RECOLHA DE EQUIPAMENTOS. N. R. Candido, V.B. G.
 PROCEDIMENTO PARA ESCOLHA DA LOCALIZAÇÃO DE UM CENTRO REGIONAL DE DISTRIBUIÇÃO E RECOLHA DE EQUIPAMENTOS N. R. Canddo, V.B. G. Campos RESUMO Apresenta-se neste trabalho um procedmento de auxílo à decsão
PROCEDIMENTO PARA ESCOLHA DA LOCALIZAÇÃO DE UM CENTRO REGIONAL DE DISTRIBUIÇÃO E RECOLHA DE EQUIPAMENTOS N. R. Canddo, V.B. G. Campos RESUMO Apresenta-se neste trabalho um procedmento de auxílo à decsão
Laboratório de Mecânica Aplicada I Estática: Roldanas e Equilíbrio de Momentos
 Laboratóro de Mecânca Aplcada I Estátca: Roldanas e Equlíbro de Momentos 1 Introdução O conhecmento das condções de equlíbro de um corpo é mprescndível em númeras stuações. Por exemplo, o estudo do equlíbro
Laboratóro de Mecânca Aplcada I Estátca: Roldanas e Equlíbro de Momentos 1 Introdução O conhecmento das condções de equlíbro de um corpo é mprescndível em númeras stuações. Por exemplo, o estudo do equlíbro
Capítulo 2. APROXIMAÇÕES NUMÉRICAS 1D EM MALHAS UNIFORMES
 Capítulo. Aproxmações numércas 1D em malhas unformes 9 Capítulo. AROXIMAÇÕS NUMÉRICAS 1D M MALHAS UNIFORMS O prncípo fundamental do método das dferenças fntas (MDF é aproxmar através de expressões algébrcas
Capítulo. Aproxmações numércas 1D em malhas unformes 9 Capítulo. AROXIMAÇÕS NUMÉRICAS 1D M MALHAS UNIFORMS O prncípo fundamental do método das dferenças fntas (MDF é aproxmar através de expressões algébrcas