Controle de Sistemas. Estabilidade. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
|
|
|
- Dina Lisboa
- 4 Há anos
- Visualizações:
Transcrição


1 Controle de Sitema Etabilidade Renato Dourado Maia Univeridade Etadual de Monte Claro Engenharia de Sitema
2 Etabilidade Relativa A etabilidade relativa de um itema pode er definida como a propriedade que é medida pelo valor da parte real de cada raiz ou par de raíze. Para dua raíze, r1 e r2, e R{r1} < R{r2}, diz-e que r2 é relativamente mai etável. A etabilidade relativa de um itema pode também er definida em termo do coeficiente de a- mortecimento, ζ, de cada par de raíze complexa. Como? 2/25
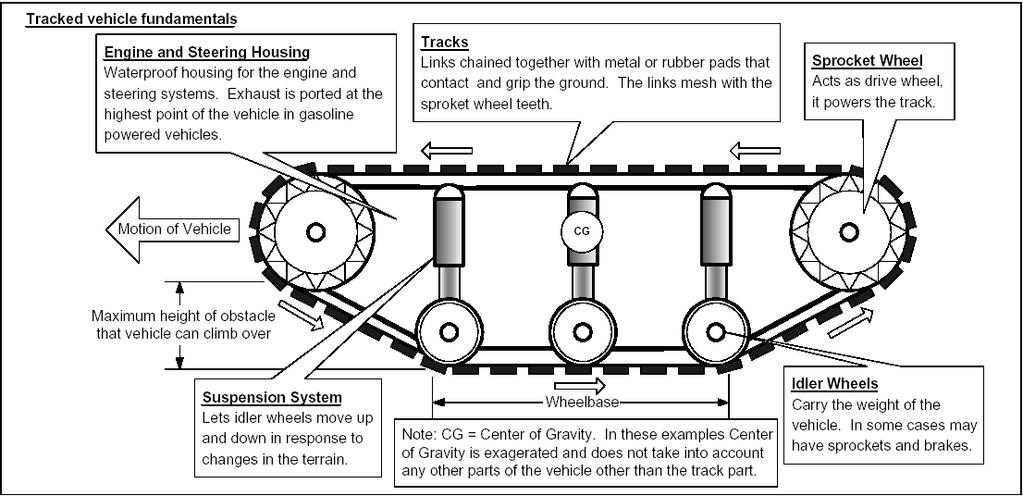
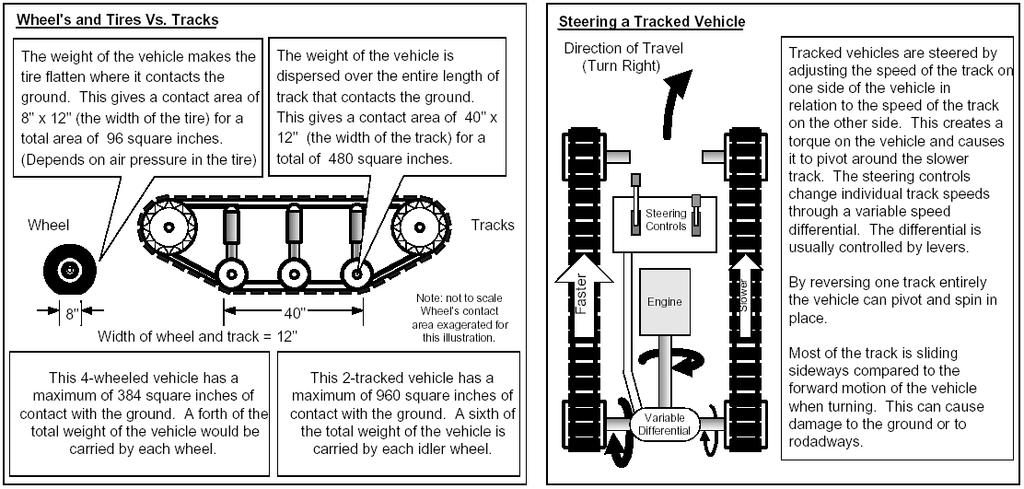
3 Objetivo: controle de direção de um veículo que poui ação independente na dua roda. O que e pretende? Para uma entrada em rampa, manter o erro em etado etacionário dentro de uma faixa. Por que projetar penando em entrada em rampa? 3/25

4 4/25
5 5/25
6 Diagrama do Sitema Acelerador Direção Trem de Potência e Controlador Torque na Lagarta Direita Equerda Veículo Y() Direção de Delocamento Diferença de Velocidade da Lagarta R () Direção de Manobra Deejada ( + a) ( + 1) ( + 2)( + 5) Y() 6/25
7 R () Direção de Manobra Deejada ( + a) ( + 1) ( + 2)( + 5) Y() Equação Caracterítica da Malha Fechada: ( + a) 1 + Gc () G () = 1+ = 0 ( + 1)( + 2)( + 5) ( 1)( 2)( 5) ( ) 8 17 ( 10) a = a= Como determinar a região de etabilidade para valore de e a? 7/25
8 Arranjo de Routh ( + 1)( + 2)( + 5) + ( + a) = ( + 10) + a= a 8 ( + 10) 0 b c 3 3 a a < 126 a > 0 3 = > ( + 10)(126 ) 64a > 0 a < c 3 b b = > 0 8 ( + 10) 8a b 3 0 8/25
9 Região de Etabilidade para o Parâmetro a e - Seçao Dorf & Bihop a Região de Etabilidade Script em Matlab: M_9_EtabilidadeProg1.m 9/25
10 Agora deve er analiado o erro em etado etacionário para uma rampa de inclinação A. Como o itema poui realimentação unitária negativa: e A A 10A = = = lim G () G() a v 0 c Infinito pare de e podem er ecolhido para que um determinado requiito de erro em etado etacionário eja atendido... a 10/25
11 Para um erro em etado etacionário igual a 23,8% do valor de A: 10A e = = 0.238A a 10 a = = = 70 e a = 0, 6 = 50 e a = 0,84 etc... etc... etc... 11/25
12 Região de Etabilidade para o Parâmetro a e - Seçao Dorf & Bihop 6 Limite da Região de Etabilidade Par (, a) Selecionado 5 4 = 70 a = 0,6 a Região de Etabilidade Script em Matlab: M_9_EtabilidadeProg1.m 12/25

13 Verão do livro para geração da região de etabilidade... 13/25
14 Verão do livro para geração da repota à rampa... A função cloop é oboleta, e deve er ubtituída pela função feedback... 14/25
15 Repota para uma Entrada em Rampa Unitária - Seçao Dorf & Bihop 16 Rampa de Entrada 14 Saída do Sitema 12 = 70 a = 0,6 Saída Tempo () Script em Matlab: M_9_EtabilidadeProg1.m 15/25
16 Obervação intereante: o valor mínimo do erro em etado etacionário ocorre para o valore a =1, 2456 e = 58, levando ao produto máximo a = 72, 25(valore aproximado). Por que não e deve ecolher ee par de valore? 16/25
17 Região de Etabilidade para o Parâmetro a e - Seçao Dorf & Bihop 6 Limite da Região de Etabilidade Par (, a) Selecionado 5 = 57 a = 1, 2 a Região de Etabilidade Porque é importante penar na etabilidade relativa! Algo mai? 17/25
18 Repota para uma Entrada em Rampa Unitária - Seçao Dorf & Bihop 20 Rampa de Entrada 18 Saída do Sitema = 57 a = 1, 2 Saída Tempo () O que aconteceu com o tempo de aentamento? 18/25
19 Repota para uma Entrada em Rampa Unitária - Seçao Dorf & Bihop 90 Rampa de Entrada 89 Saída do Sitema = 57 a = 1.2 Saída Tempo () O que aconteceu com o erro em etado etacionário? 19/25
20 Problema PA6.4 Dorf & Bihop Uma linha de enchimento de garrafa ua um mecanimo de fuo, como motrado na figura do lide a eguir. A retroação do tacômetro é u- ada para manter o controle precio da velocidade. Determinar e plotar a faixa de valore de e p que permitem operação etável. 20/25

21 Problema PA6.4 Dorf & Bihop 21/25
 1 ( + 1)( +")
22 Problema PA6.4 Dorf & Bihop R () 1 ( + 1)( + p) Y() Velocidade 22/25
23 Problema PA6.4 Dorf & Bihop R () 1 ( + 1)( + p) Y() Velocidade Equação Caracterítica da Malha Fechada: 1 + Gc () G () = 1+ = 0 ( + 1)( + p) = + p + + p + = 3 2 ( 1)( p) ( 1) 0 E agora? 23/25
24 Problema PA6.4 Dorf & Bihop Arranjo de Routh + + p + = + p+ + p+ = 3 2 ( 1)( ) ( 1) ( p + 1) b 2 p b 2 p( p + 1) = > ( p + 1) 0 > 0 ( p+ 1) > 0 p> 1 2 p( p+ 1) > 0 < p + p 24/25
25 Problema PA6.4 Dorf & Bihop Limite de Etabilidade para o Parâmetro p e - PA6.4 - Dorf & Bihop Limite de Etabilidade - Relação entre p e Limite de Etabilidade de p Limite de Etabilidade de Região de Etabilidade p Script em Matlab: PA64_Dorf_Bihop_8Ed.m 25/25
Controle de Sistemas. Desempenho de Sistemas de Controle. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sitema Deempenho de Sitema de Controle Renato Dourado Maia Univeridade Etadual de Monte Claro Engenharia de Sitema Repota Tranitória de Sitema de Ordem Superior A repota ao degrau de um itema
Controle de Sitema Deempenho de Sitema de Controle Renato Dourado Maia Univeridade Etadual de Monte Claro Engenharia de Sitema Repota Tranitória de Sitema de Ordem Superior A repota ao degrau de um itema
Controle de Sistemas. Estabilidade. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sitema Etabilidade Renato Dourado Maia Univeridade Etadual de Monte Claro Engenharia de Sitema Etabilidade: Uma Idéia Intuitiva... Etável... Neutro... Intável... 2/5 Etabilidade Ma o que é
Controle de Sitema Etabilidade Renato Dourado Maia Univeridade Etadual de Monte Claro Engenharia de Sitema Etabilidade: Uma Idéia Intuitiva... Etável... Neutro... Intável... 2/5 Etabilidade Ma o que é
Controle de Sistemas. Desempenho de Sistemas de Controle. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas O é um telescópio de 2,4m, que fica a 380 milhas da Terra, sendo
Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas O é um telescópio de 2,4m, que fica a 380 milhas da Terra, sendo
Análise do Erro Erro Estacionário
 SS-TSS Erro Etacionário e Etabilidade 4 Análie do Erro Erro Etacionário - Para cada um do itema abaixo repreentado pela ua função de tranferência da cadeia activa e abendo que pouem realimentação unitária,
SS-TSS Erro Etacionário e Etabilidade 4 Análie do Erro Erro Etacionário - Para cada um do itema abaixo repreentado pela ua função de tranferência da cadeia activa e abendo que pouem realimentação unitária,
Lista de exercícios 2 Resposta no Tempo, Erros Estacionários e Lugar Geométrico das Raízes
 16003 Controle Dinâmico ENE - UnB Lita de exercício 16003 Controle Dinâmico o emetre de 01 Lita de exercício Repota no Tempo, Erro Etacionário e Lugar Geométrico da Raíze 1. Quando o itema motrado na figura
16003 Controle Dinâmico ENE - UnB Lita de exercício 16003 Controle Dinâmico o emetre de 01 Lita de exercício Repota no Tempo, Erro Etacionário e Lugar Geométrico da Raíze 1. Quando o itema motrado na figura
Sinais e Sistemas Mecatrónicos
 Sinai e Sitema Mecatrónico Análie de Sitema no Domínio do Tempo Etabilidade Joé Sá da Cota Joé Sá da Cota T9 - Análie de Sitema no Tempo - Etabilidade 1 Análie e Projecto de Sitema A análie e a íntee (projecto)
Sinai e Sitema Mecatrónico Análie de Sitema no Domínio do Tempo Etabilidade Joé Sá da Cota Joé Sá da Cota T9 - Análie de Sitema no Tempo - Etabilidade 1 Análie e Projecto de Sitema A análie e a íntee (projecto)
Resposta em Regime Permanente
 Repota em Regime Permanente Erro em Regime: e(t ) Mede a capacidade de itema de acompanhar inai em regime permanente Repota em Regime Permanente Claificação de itema de controle: tipo 0,,2,... Quanto à
Repota em Regime Permanente Erro em Regime: e(t ) Mede a capacidade de itema de acompanhar inai em regime permanente Repota em Regime Permanente Claificação de itema de controle: tipo 0,,2,... Quanto à
Ficha 8 Aplicação de conceitos em MatLab
 U N I V E R S I D A D E D A B E I R A I N T E R I O R Departamento de Engenharia Electromecânica CONTROLO DISCRETO E DIGITAL (Prática/Laboratorial) Ficha 8 Aplicação de conceito em MatLab Todo o exercício
U N I V E R S I D A D E D A B E I R A I N T E R I O R Departamento de Engenharia Electromecânica CONTROLO DISCRETO E DIGITAL (Prática/Laboratorial) Ficha 8 Aplicação de conceito em MatLab Todo o exercício
ESTABILIDADE MALHA FECHADA
 Departamento de Engenharia Química e de Petróleo UFF Diciplina: TEQ- CONTROLE DE PROCESSOS ESTABILIDADE Método critério de Routh-Hurwitz Cao Epeciai Prof a Ninoka Bojorge ESTABILIDADE MALHA FECHADA Regiõe
Departamento de Engenharia Química e de Petróleo UFF Diciplina: TEQ- CONTROLE DE PROCESSOS ESTABILIDADE Método critério de Routh-Hurwitz Cao Epeciai Prof a Ninoka Bojorge ESTABILIDADE MALHA FECHADA Regiõe
Projeto do compensador PID no lugar das raízes
 Projeto do compenador PID no lugar da raíze 0 Introdução DAELN - UTFPR - Controle I Paulo Roberto Brero de Campo Neta apotila erão etudado o projeto do compenadore PI, PD e PID atravé do lugar da raíze
Projeto do compenador PID no lugar da raíze 0 Introdução DAELN - UTFPR - Controle I Paulo Roberto Brero de Campo Neta apotila erão etudado o projeto do compenadore PI, PD e PID atravé do lugar da raíze
Outline. Erro em Regime Permanente. Mapeamento de Pólos e Zeros Equivalente Discreto por Integração Numérica Equivalência da resposta ao Degrau
 univerity-logo Outline Análie em Etado Etacionário Síntee diretamente obre o plano Análie em Etado Etacionário Erro em Regime Permanente 2 Mapeamento de Pólo e Zero Equivalente Dicreto por Integração Numérica
univerity-logo Outline Análie em Etado Etacionário Síntee diretamente obre o plano Análie em Etado Etacionário Erro em Regime Permanente 2 Mapeamento de Pólo e Zero Equivalente Dicreto por Integração Numérica
Aula 05 Diagramas de blocos & erro
 Aula 05 Diagrama de bloco & erro input output Bloco imple Caixa preta Black box Caixa preta ou Black box: G() input output Função de Tranferência: ou: G () Y() X() Y() G() X() ou eja, SAÍDA F.T. X ENTRADA
Aula 05 Diagrama de bloco & erro input output Bloco imple Caixa preta Black box Caixa preta ou Black box: G() input output Função de Tranferência: ou: G () Y() X() Y() G() X() ou eja, SAÍDA F.T. X ENTRADA
Aula 7 Resposta no domínio do tempo - Sistemas de segunda ordem
 FUNDAMENTOS DE CONTROLE E AUTOMAÇÃO Aula 7 Repota no domínio do tempo - Sitema de egunda ordem Prof. Marcio Kimpara Univeridade Federal de Mato Groo do Sul Sitema de primeira ordem Prof. Marcio Kimpara
FUNDAMENTOS DE CONTROLE E AUTOMAÇÃO Aula 7 Repota no domínio do tempo - Sitema de egunda ordem Prof. Marcio Kimpara Univeridade Federal de Mato Groo do Sul Sitema de primeira ordem Prof. Marcio Kimpara
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Definiçõe O gráfico do Lugar geométrico da raíze, conite no deenho de todo o valore que o pólo de malha fechada de uma função
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Definiçõe O gráfico do Lugar geométrico da raíze, conite no deenho de todo o valore que o pólo de malha fechada de uma função
ESTABILIDADE Método critério de Routh-Hurwitz Casos Especiais
 Departamento de Engenharia Qímica e de Petróleo UFF Diciplina: TEQ- CONTROLE DE PROCESSOS cto ESTABILIDADE Método critério de Roth-Hrwitz Cao Epeciai Prof a Ninoka Bojorge ESTABILIDADE MALHA FECHADA Regiõe
Departamento de Engenharia Qímica e de Petróleo UFF Diciplina: TEQ- CONTROLE DE PROCESSOS cto ESTABILIDADE Método critério de Roth-Hrwitz Cao Epeciai Prof a Ninoka Bojorge ESTABILIDADE MALHA FECHADA Regiõe
Método do Lugar das Raízes
 Método do Lugar das Raízes Conceito de Lugar das Raízes; O Procedimento do Lugar das Raízes; Projeto de Parâmetros pelo Método do Lugar das Raízes; Sensibilidade e Lugar das Raízes; Controlador de Três
Método do Lugar das Raízes Conceito de Lugar das Raízes; O Procedimento do Lugar das Raízes; Projeto de Parâmetros pelo Método do Lugar das Raízes; Sensibilidade e Lugar das Raízes; Controlador de Três
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
3º ano 1º semestre 2007/2008
 Metrado Integrado em Engenharia Electrotécnica e de Computadore (LEEC) Departamento de Engenharia Electrotécnica e de Computadore (DEEC) CONROLO 3º ano º emetre 2007/2008 ranparência de apoio à aula teórica
Metrado Integrado em Engenharia Electrotécnica e de Computadore (LEEC) Departamento de Engenharia Electrotécnica e de Computadore (DEEC) CONROLO 3º ano º emetre 2007/2008 ranparência de apoio à aula teórica
Sistemas e Sinais 2009/2010
 Análie de Sitema alimentado Sitema e Sinai 9/ Análie de itema realimentado Álgebra de diagrama de bloco Sitema realimentado Etabilidade Deempenho SSin Diagrama de bloco Sitema em érie X Y G G Z Y G X Z
Análie de Sitema alimentado Sitema e Sinai 9/ Análie de itema realimentado Álgebra de diagrama de bloco Sitema realimentado Etabilidade Deempenho SSin Diagrama de bloco Sitema em érie X Y G G Z Y G X Z
4. CONTROLE PID COM O PREDITOR DE SMITH
 4 CONTROLADOR PID COM O PREDITOR DE SMITH 28 4. CONTROLE PID COM O PREDITOR DE SMITH 4.1 SINTONIA DO CONTROLADOR PID Nete capítulo erá apreentada a metodologia para a intonia do controlador PID. Reultado
4 CONTROLADOR PID COM O PREDITOR DE SMITH 28 4. CONTROLE PID COM O PREDITOR DE SMITH 4.1 SINTONIA DO CONTROLADOR PID Nete capítulo erá apreentada a metodologia para a intonia do controlador PID. Reultado
Aula 04. Resposta no Tempo Sistema de 2a Ordem Parâmetros de Desempenho. Prof. Ricardo N. Paiva
 Aula 04 Repota no Tempo Sitema de a Ordem Parâmetro de Deempenho Prof. Ricardo N. Paiva Sitema de a. ordem Comparado com a implicidade do itema de a ordem, o de a ordem apreentam uma ampla gama de repota.
Aula 04 Repota no Tempo Sitema de a Ordem Parâmetro de Deempenho Prof. Ricardo N. Paiva Sitema de a. ordem Comparado com a implicidade do itema de a ordem, o de a ordem apreentam uma ampla gama de repota.
Introdução ao Matlab e Simulink. E. Morgado Setembro A - usando o Matlab
 Introdução ao Matlab e Simulink - Enaio a realizar durante a eão no Laboratório E. Morgado Setembro 008 Objectivo: Familiarização com alguma capacidade do oftware MATLAB/Simulink, atravé da ilutração de
Introdução ao Matlab e Simulink - Enaio a realizar durante a eão no Laboratório E. Morgado Setembro 008 Objectivo: Familiarização com alguma capacidade do oftware MATLAB/Simulink, atravé da ilutração de
Pólos, Zeros e Estabilidade
 Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA
 OGATA") RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
Sistemas Multivariaveis: conceitos fundamentais
 Departaento de Engenharia Quíica e de Petróleo UFF Diciplina: TEQ- CONTROLE DE PROCESSOS Sitea Multivariavei: conceito fundaentai Prof a Ninoka Bojorge Sitea ultivariávei São itea co vária entrada e aída,
Departaento de Engenharia Quíica e de Petróleo UFF Diciplina: TEQ- CONTROLE DE PROCESSOS Sitea Multivariavei: conceito fundaentai Prof a Ninoka Bojorge Sitea ultivariávei São itea co vária entrada e aída,
SISTEMA DE POTÊNCIA. Pd(s) Figura 1. , variando entre [ 0 e + ] K = Real. Figura 2
![SISTEMA DE POTÊNCIA. Pd(s) Figura 1. , variando entre [ 0 e + ] K = Real. Figura 2](/thumbs/99/142810116.jpg "SISTEMA DE POTÊNCIA. Pd(s) Figura 1. , variando entre [ 0 e + ] K = Real. Figura 2") 0 - AUTOMAÇÃO E CONTOLE ocê é integrante de uma equipe de engenheiro em uma emprea pretadora de erviço para o etor de energia elétrica. Sua equipe etá encarregada do projeto de um itema de controle de
0 - AUTOMAÇÃO E CONTOLE ocê é integrante de uma equipe de engenheiro em uma emprea pretadora de erviço para o etor de energia elétrica. Sua equipe etá encarregada do projeto de um itema de controle de
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II
 Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Função de Transferência. Função de Transferência
 Departamento de Engenharia Química e de Petróleo UFF Diciplina: TEQ10- CONTROLE DE PROCESSOS Função de Tranferência cuto Prof a Ninoka Bojorge Sumário metre Função de Tranferência 5. Função de tranferência
Departamento de Engenharia Química e de Petróleo UFF Diciplina: TEQ10- CONTROLE DE PROCESSOS Função de Tranferência cuto Prof a Ninoka Bojorge Sumário metre Função de Tranferência 5. Função de tranferência
SISTEMAS DE CONTROLE SIC
 SISTEMAS DE CONTROLE SIC Parte 0 Introdução Professor Dr. Michael Klug 1 Definição CONTROLE é o ato de comandar, dirigir, ordenar ou manipular Controle clássico (convencional); Controle moderno; Controle
SISTEMAS DE CONTROLE SIC Parte 0 Introdução Professor Dr. Michael Klug 1 Definição CONTROLE é o ato de comandar, dirigir, ordenar ou manipular Controle clássico (convencional); Controle moderno; Controle
Controle de Processos
 CONCURSO PETROBRAS ENGENHEIRO(A) DE PROCESSAMENTO JÚNIOR ENGENHEIRO(A) JÚNIOR - ÁREA: PROCESSAMENTO Controle de Proceo Quetõe Reolvida QUESTÕES RETIRADAS DE PROVAS DA BANCA CESGRANRIO Produzido por Exata
CONCURSO PETROBRAS ENGENHEIRO(A) DE PROCESSAMENTO JÚNIOR ENGENHEIRO(A) JÚNIOR - ÁREA: PROCESSAMENTO Controle de Proceo Quetõe Reolvida QUESTÕES RETIRADAS DE PROVAS DA BANCA CESGRANRIO Produzido por Exata
Transformada de Laplace
 Sinai e Sitema - Tranformada de Laplace A Tranformada de Laplace é uma importante ferramenta para a reolução de equaçõe diferenciai. Também é muito útil na repreentação e análie de itema. É uma tranformação
Sinai e Sitema - Tranformada de Laplace A Tranformada de Laplace é uma importante ferramenta para a reolução de equaçõe diferenciai. Também é muito útil na repreentação e análie de itema. É uma tranformação
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA*
 ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
Instituto Politécnico de Tomar D.E.E. Controlo Digital/ Controlo Inteligente Eng. Electrotécnica e Computadores / Engenharia Informática (2005/06)
") (5/6) Selecção de eercício para a aula prática de Controlo Digital Fonte bibliográfica: [Nune] Urbano Nune, Controlo Digital: Eercício reolvido, 3 [Franklin] G. Franklin, J. Powell, M. Workman, Digital
(5/6) Selecção de eercício para a aula prática de Controlo Digital Fonte bibliográfica: [Nune] Urbano Nune, Controlo Digital: Eercício reolvido, 3 [Franklin] G. Franklin, J. Powell, M. Workman, Digital
Função de Transferência Processos de Primeira e Segunda Ordem
 Diciplina: TEQ0- CONTROLE DE PROCESSOS Função de Tranferência Proceo de Primeira e Segunda Ordem Prof a Ninoka Bojorge Departamento de Engenharia Química e de Petróleo UFF Sumário Função de Tranferência.
Diciplina: TEQ0- CONTROLE DE PROCESSOS Função de Tranferência Proceo de Primeira e Segunda Ordem Prof a Ninoka Bojorge Departamento de Engenharia Química e de Petróleo UFF Sumário Função de Tranferência.
PID e Lugar das Raízes
 PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA
 DEPARTAENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV334 FUNDAENTOS DE CONTROLE E ENGENHARIA NOTAS DE AULA* Prof. Helio itio orihita * Ete texto é um mero roteiro
DEPARTAENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV334 FUNDAENTOS DE CONTROLE E ENGENHARIA NOTAS DE AULA* Prof. Helio itio orihita * Ete texto é um mero roteiro
Controle de Sistemas. Modelagem Matemática de Sistemas. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sistemas Modelagem Matemática de Sistemas Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Motivação Básica Subsistemas de um Ônibus Espacial 2/25 Componentes
Controle de Sistemas Modelagem Matemática de Sistemas Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Motivação Básica Subsistemas de um Ônibus Espacial 2/25 Componentes
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA
 CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
Sistemas de Controle I (Servomecanismo) Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Carlos Alexandre Mello. Carlos Alexandre Mello 1") Sistemas de Controle I (Servomecanismo) Carlos Alexandre Mello 1 Sobre a Disciplina 2 O que são sistemas de controle Um sistema de controle é um conjunto de componentes organizados de forma a conseguir
Sistemas de Controle I (Servomecanismo) Carlos Alexandre Mello 1 Sobre a Disciplina 2 O que são sistemas de controle Um sistema de controle é um conjunto de componentes organizados de forma a conseguir
8 Equações de Estado
 J. A. M. Felippe de Souza 8 Equaçõe de Etado 8 Equaçõe de Etado 8. Repreentação por Variávei de Etado Exemplo 4 Exemplo 8. 4 Exemplo 8. 6 Exemplo 8. 6 Exemplo 8.4 8 Matriz na forma companheira Exemplo
J. A. M. Felippe de Souza 8 Equaçõe de Etado 8 Equaçõe de Etado 8. Repreentação por Variávei de Etado Exemplo 4 Exemplo 8. 4 Exemplo 8. 6 Exemplo 8. 6 Exemplo 8.4 8 Matriz na forma companheira Exemplo
Capítulo 9. Projeto por Intermédio do Lugar das Raízes (Continuação)
") Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
1 s(s+0,7). (1.1) O controlador deve ser tal que o sistema em malha fechada apresente as seguintes características para entrada degrau: G p (s) =
. (1.1) O controlador deve ser tal que o sistema em malha fechada apresente as seguintes características para entrada degrau: G p (s) =") 1 Projeto de Controlador Digital - v1.1 1.1 Objetivo A finalidade deta experiência é projetar um controlador digital por meio técnica convencionai [Franklin, Powell e Workman 2006], [Ogata 1995], implementá-lo
1 Projeto de Controlador Digital - v1.1 1.1 Objetivo A finalidade deta experiência é projetar um controlador digital por meio técnica convencionai [Franklin, Powell e Workman 2006], [Ogata 1995], implementá-lo
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Sumário. CAPÍTULO 1 Introdução 1. CAPÍTULO 2 Terminologia dos Sistemas de Controle 14
 Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
6-Análise de estabilidade de sistemas feedback 6.1- Noções de estabilidade
 6-Análise de estabilidade de sistemas feedback 6.- Noções de estabilidade Nos capítulos anteriores examinamos as características dinâmicas da resposta de sistemas em malha fechada e desenvolvemos a função
6-Análise de estabilidade de sistemas feedback 6.- Noções de estabilidade Nos capítulos anteriores examinamos as características dinâmicas da resposta de sistemas em malha fechada e desenvolvemos a função
Método do Lugar das Raízes
 étodo do Lugar da Raíze Coceito de Lugar da Raíze; O Procedimeto do Lugar da Raíze; Proeto de Parâmetro pelo étodo do Lugar da Raíze; Seibilidade e Lugar da Raíze; Cotrolador de Trê Termo (PID); Exemplo
étodo do Lugar da Raíze Coceito de Lugar da Raíze; O Procedimeto do Lugar da Raíze; Proeto de Parâmetro pelo étodo do Lugar da Raíze; Seibilidade e Lugar da Raíze; Cotrolador de Trê Termo (PID); Exemplo
Um sistema pode ser dito estável, se entradas limitadas (finitas) geram saídas limitadas.
 geram saídas limitadas.") Etabilidade Uma araterítia importte para o itema de ontrole é qe ele eja etável. Sem ela qalqer otra araterítia, omo a de m bom deempenho, não faz entido. Para itema lineare, a araterítia de etabilidade
Etabilidade Uma araterítia importte para o itema de ontrole é qe ele eja etável. Sem ela qalqer otra araterítia, omo a de m bom deempenho, não faz entido. Para itema lineare, a araterítia de etabilidade
VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
Resposta de Frequência
 Deartamento de Engenharia Química e de Petróleo UFF Dicilina: TEQ0- CONTROLE DE PROCESSOS Método de Margem de anho e Outro Proceo de Searação de Fae Prof a Ninoka Boorge Reota de Frequência Quando um Proceo
Deartamento de Engenharia Química e de Petróleo UFF Dicilina: TEQ0- CONTROLE DE PROCESSOS Método de Margem de anho e Outro Proceo de Searação de Fae Prof a Ninoka Boorge Reota de Frequência Quando um Proceo
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
EES-20: Sistemas de Controle II. 20 Outubro 2017 (Tarde)
") EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
Unidade VI - Estabilidade de Sistemas de Controle com Retroação
 Uidade VI - Etabilidade de Sitema de Cotrole om Retroação Coeito de Etabilidade; Critério de Etabilidade de Routh-Hurwitz; A Etabilidade Relativa de Sitema de Cotrole om Retroação; A Etabilidade de Sitema
Uidade VI - Etabilidade de Sitema de Cotrole om Retroação Coeito de Etabilidade; Critério de Etabilidade de Routh-Hurwitz; A Etabilidade Relativa de Sitema de Cotrole om Retroação; A Etabilidade de Sitema
Instrumentação e Controle Aula 1. Prof. Renato Watanabe ESTO004-17
 Instrumentação e Controle Aula 1 Apresentação Prof. Renato Watanabe ESTO004-17 Calendário Quarta-Feira Sexta-Feira Data Tema Data Tema 31/mai AULA 1: Apresentação 02/jun AULA 2: Classificação de sistemas
Instrumentação e Controle Aula 1 Apresentação Prof. Renato Watanabe ESTO004-17 Calendário Quarta-Feira Sexta-Feira Data Tema Data Tema 31/mai AULA 1: Apresentação 02/jun AULA 2: Classificação de sistemas
Objetivos de Controle
 Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.8 - Técnicas do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.8 - Técnicas do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
REPÚBLICA FEDERATIVA DO BRASIL ESTADO DE SANTA CATARINA Universidade do Estado de Santa Catarina - UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS - UDESC/CCT
 Curso: ELE-ELE - Bacharelado em Engenharia Elétrica Departamento: DEE - Engenharia Elétrica Disciplina: null Código: ISC0001 Carga horária: 90 Período letivo: 2017/2 Professor: Celso José Faria de Araújo
Curso: ELE-ELE - Bacharelado em Engenharia Elétrica Departamento: DEE - Engenharia Elétrica Disciplina: null Código: ISC0001 Carga horária: 90 Período letivo: 2017/2 Professor: Celso José Faria de Araújo
Pontifícia Universidade Católica de Goiás. Prof: Marcos Lajovic Carneiro Aluno (a): Sistemas de Controle I
: Sistemas de Controle I") Pontifícia Universidade Católica de Goiás Projeto de Escola de Engenharia ENG 3502 Controle de Processos Controle I Prof: Marcos Lajovic Carneiro Aluno (a): Sistemas de Controle I Estudo de Caso Antena
Pontifícia Universidade Católica de Goiás Projeto de Escola de Engenharia ENG 3502 Controle de Processos Controle I Prof: Marcos Lajovic Carneiro Aluno (a): Sistemas de Controle I Estudo de Caso Antena
Erro em regime permanente em sistema de controle com
 Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Planejamento da disciplina
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Planejamento da disciplina
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr.
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr.
Pontifícia Universidade Católica de Goiás Escola de Engenharia. Aluno (a): Aula Laboratório 11 Cap 6 Estabilidade
: Aula Laboratório 11 Cap 6 Estabilidade") Pontifícia Universidade Católica de Goiás Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Filipe Fraga 11 Aluno (a): Aula Laboratório 11 Cap 6 Estabilidade 1- Considerações teóricas:
Pontifícia Universidade Católica de Goiás Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Filipe Fraga 11 Aluno (a): Aula Laboratório 11 Cap 6 Estabilidade 1- Considerações teóricas:
Representação de Modelos Dinâmicos em Espaço de Estados Graus de Liberdade para Controle
 Repreentação de Modelo Dinâmico em Epaço de Etado Grau de Liberdade para Controle Epaço de Etado (CP1 www.profeore.deq.ufcar.br/ronaldo/cp1 DEQ/UFSCar 1 / 79 Roteiro 1 Modelo Não-Linear Modelo Não-Linear
Repreentação de Modelo Dinâmico em Epaço de Etado Grau de Liberdade para Controle Epaço de Etado (CP1 www.profeore.deq.ufcar.br/ronaldo/cp1 DEQ/UFSCar 1 / 79 Roteiro 1 Modelo Não-Linear Modelo Não-Linear
Capítulo 11. Projeto por Intermédio da Resposta de Freqüência
 Capítulo 11 Projeto por Intermédio da Resposta de Freqüência Fig. 11.1 Gráficos de Bode mostrando o ajuste de ganho para uma margem de fase desejada Fase (graus) Aumento de ganho necessário 2 Fig. 11.2
Capítulo 11 Projeto por Intermédio da Resposta de Freqüência Fig. 11.1 Gráficos de Bode mostrando o ajuste de ganho para uma margem de fase desejada Fase (graus) Aumento de ganho necessário 2 Fig. 11.2
SC1 Sistemas de Controle 1. Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
Denominação O Problema Um pouco de História Motivação Pré-requisitos Conceitos Bibliografia Recursos na Internet C. Capítulo 1. Gustavo H. C.
 Capítulo 1 Introdução Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Introdução 1/32 Este material contém notas de aula
Capítulo 1 Introdução Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Introdução 1/32 Este material contém notas de aula
Capítulo 10. Técnicas de Resposta de Freqüência
 Capítulo 10 Técnicas de Resposta de Freqüência Fig.10.1 O Analisador Dinâmico de Sinal HP 35670A obtém dados de resposta de freqüência de um sistema físico. Os dados exibidos podem ser usados para analisar,
Capítulo 10 Técnicas de Resposta de Freqüência Fig.10.1 O Analisador Dinâmico de Sinal HP 35670A obtém dados de resposta de freqüência de um sistema físico. Os dados exibidos podem ser usados para analisar,
Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes
 Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 2 de novembro de 202 Introdução
Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 2 de novembro de 202 Introdução
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica. Sistemas de Controle Realimentados
 Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da
Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da
Capítulo 7. Erros de Estado Estacionário
 Capítulo 7 Erros de Estado Estacionário Tabela 7.1 Formas de onda dos sinais de teste para o cálculo dos erros de estado estacionário em sistemas de controle de posição Forma de onda Nome Degrau Rampa
Capítulo 7 Erros de Estado Estacionário Tabela 7.1 Formas de onda dos sinais de teste para o cálculo dos erros de estado estacionário em sistemas de controle de posição Forma de onda Nome Degrau Rampa
UNIVERSIDADE ESTADUAL PAULISTA Júlio de Mesquita Filho Campus Experimental de Sorocaba
 PLANO DE ENSINO UNIDADE: CURSO: Engenharia de Controle e Automação HABILITAÇÃO: Controle e Automação OPÇÃO: - DEPARTAMENTO: - IDENTIFICAÇÃO: CÓDIGO: ITC DISCIPLINA: INTRODUÇÃO À TEORIA DE CONTROLE SERIAÇÃO
PLANO DE ENSINO UNIDADE: CURSO: Engenharia de Controle e Automação HABILITAÇÃO: Controle e Automação OPÇÃO: - DEPARTAMENTO: - IDENTIFICAÇÃO: CÓDIGO: ITC DISCIPLINA: INTRODUÇÃO À TEORIA DE CONTROLE SERIAÇÃO
4.1 Aproximação por Bode
 4. Aproximação por Bode é poível atender a epecificaçõe de algun filtro a partir do traçado do diagrama de Bode (termo de ª e ª orden) Exemplo 4.) Aproximar um filtro paa-baixa que atifaça a epecificaçõe
4. Aproximação por Bode é poível atender a epecificaçõe de algun filtro a partir do traçado do diagrama de Bode (termo de ª e ª orden) Exemplo 4.) Aproximar um filtro paa-baixa que atifaça a epecificaçõe
PROJETO DE CONTROLADORES A PARTIR DO PLANO S. critério Routh-Hurwitz análise de estabilidade análise de desempenho
 PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
Fundamentos de Controlo
 Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Capítulo 8. Técnicas do Lugar das Raízes
 Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Capítulo 2 Dinâmica de Sistemas Lineares
 Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
SC1 Sistemas de Controle 1. Cap. 5 Método do Lugar das Raízes Abordagem de Projetos Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 5 Método do Lugar das Raízes Abordagem de Projetos Prof. Tiago S Vítor Sumário 1. Introdução 2. Definições 3. Alguns detalhes construtivos sobre LR 4. Condições para um
SC1 Sistemas de Controle 1 Cap. 5 Método do Lugar das Raízes Abordagem de Projetos Prof. Tiago S Vítor Sumário 1. Introdução 2. Definições 3. Alguns detalhes construtivos sobre LR 4. Condições para um
Melhoramos a resposta temporal associando um compensador de avanço de fase que contribui com
 Compensador por Avanço / Atraso de fase A compensação de avanço / atraso de fase, é a composição das duas técnicas vistas anteriormente em um único compensador. Melhoramos a resposta temporal associando
Compensador por Avanço / Atraso de fase A compensação de avanço / atraso de fase, é a composição das duas técnicas vistas anteriormente em um único compensador. Melhoramos a resposta temporal associando
Tópicos Especiais em Energia Elétrica (Projeto de Inversores e Conversores CC-CC)
") Departamento de Engenharia Elétria Tópio Epeiai em Energia Elétria Projeto de Inerore e onerore - Aula. Projeto de Sitema de ontrole Linear Prof. João Amério Vilela Teoria de ontrole Linear A figura abaixo
Departamento de Engenharia Elétria Tópio Epeiai em Energia Elétria Projeto de Inerore e onerore - Aula. Projeto de Sitema de ontrole Linear Prof. João Amério Vilela Teoria de ontrole Linear A figura abaixo
Circuitos Elétricos II
 Univeridade Federal do ABC Eng. de Intrumentação, Automação e Robótia Ciruito Elétrio II Joé Azue, Prof. Dr. Filtro Ativo Introdução Filtro Ativo Limitaçõe do Filtro Paivo: Não podem gerar ganho uperior
Univeridade Federal do ABC Eng. de Intrumentação, Automação e Robótia Ciruito Elétrio II Joé Azue, Prof. Dr. Filtro Ativo Introdução Filtro Ativo Limitaçõe do Filtro Paivo: Não podem gerar ganho uperior
CONTROLO. 3º ano 1º semestre 2004/2005. Transparências de apoio às aulas teóricas. Efeitos da Realimentação e Erros em Regime Permanente
 Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano º semestre 004/005 Transparências de apoio às aulas
Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano º semestre 004/005 Transparências de apoio às aulas
Experimento #4. Filtros analógicos ativos LABORATÓRIO DE ELETRÔNICA
 UNIVESIDADE FEDEAL DE CAMPINA GANDE CENTO DE ENGENHAIA ELÉTICA E INFOMÁTICA DEPATAMENTO DE ENGENHAIA ELÉTICA LABOATÓIO DE ELETÔNICA Experimento #4 Filtro analógico ativo EXPEIMENTO #4 Objetivo Gerai Eta
UNIVESIDADE FEDEAL DE CAMPINA GANDE CENTO DE ENGENHAIA ELÉTICA E INFOMÁTICA DEPATAMENTO DE ENGENHAIA ELÉTICA LABOATÓIO DE ELETÔNICA Experimento #4 Filtro analógico ativo EXPEIMENTO #4 Objetivo Gerai Eta
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II PROF. MARCOS LAJOVIC CARNEIRO - 2017/1 Turma A01/1 PLANO
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II PROF. MARCOS LAJOVIC CARNEIRO - 2017/1 Turma A01/1 PLANO
10 - Estratégias de Acionamento e Controle do MI Equações de regime permanente : 0 dt
 - Etratégia de Acionamento e Controle do M Equaçõe de regime permanente : ). ( dt d j R z j R j R U mec p H H H H mec p mec z p z A equaçõe dinâmica tornam-e: Expreando (.) omente em função da corrente
- Etratégia de Acionamento e Controle do M Equaçõe de regime permanente : ). ( dt d j R z j R j R U mec p H H H H mec p mec z p z A equaçõe dinâmica tornam-e: Expreando (.) omente em função da corrente
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA. Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
Sintonia de Controladores PID
 Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
FEUP-DEEC Teoria dos Sistemas
 SNL- FEP-DEEC Teoria do Sitema Problema obre Sitema Não Lineare SNL Conidere o eguinte itema, onde o elemento não linear é um comutador cuja aída toma o valore e e que pode ter hiteree: a a K ( ) 3 a)
SNL- FEP-DEEC Teoria do Sitema Problema obre Sitema Não Lineare SNL Conidere o eguinte itema, onde o elemento não linear é um comutador cuja aída toma o valore e e que pode ter hiteree: a a K ( ) 3 a)
Modelagem e Análise de um Sistema de Excitação Convencional
 Modelagem e Análise de um Sistema de Excitação Convencional Prof. Antonio Simões Costa Grupo Sist. Potência - UFSC A. Simões Costa (GSP/UFSC) Model. e Anál. Sist. Exc. 1 / 19 Sistema de excitação com ampli
Modelagem e Análise de um Sistema de Excitação Convencional Prof. Antonio Simões Costa Grupo Sist. Potência - UFSC A. Simões Costa (GSP/UFSC) Model. e Anál. Sist. Exc. 1 / 19 Sistema de excitação com ampli
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
Controle de posição com realimentação auxiliar de velocidade
 EXPERIÊNCIA 7 Controle de posição com realimentação auxiliar de velocidade PTC 3312 Laboratório de Controle 2º semestre de 2017 Fábio Fialho Laboratório de Automação e Controle Departamento de Engenharia
EXPERIÊNCIA 7 Controle de posição com realimentação auxiliar de velocidade PTC 3312 Laboratório de Controle 2º semestre de 2017 Fábio Fialho Laboratório de Automação e Controle Departamento de Engenharia