Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica. Sistemas de Controle Realimentados
|
|
|
- Adelina Ximenes Benevides
- 6 Há anos
- Visualizações:
Transcrição
1 Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1
2 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da equação característica deste sistema (pólos do sistema) possuirem parte real negativa. 2
3 Margens de Estabilidade A estabilidade relativa do sistema está associada as margens de variações possíveis nos coeficientes da equação característica que ainda mantém o sistema estável. 3
4 Margens de Estabilidade Conclusões sobre a estabilidade absoluta e relativa de um sistema LTI podem ser obtidas diretamente da resposta em frequência do sistema através dos Diagrama de Bode Diagrama Polar 4
5 Margens de Estabilidade A resposta em freqüência de um sistema pode ser obtida experimentalmente, não necessitando do modelo matemático nem do conhecimento da função de transferência do sistema. 5
6 Margens de Estabilidade A interpretação da resposta em freqüência da função de transferência de malha aberta (de laço) do sistema traz informações fundamentais para: Análise de um sistema realimentado. Projeto de um sistema realimentado. 6
7 O critério de estabilidade de Nyquist Relaciona a estabilidade de um sistema de controle realimentado em malha fechada através da resposta em freqüência do mesmo sistema operando em malha aberta (do laço). 7
8 O critério de estabilidade de Nyquist pode ser utilizado para avaliar estabilidade relativa do sistema ou seja, o quão próximo a curva de resposta em freqüência da função de transferência de malha aberta (de laço) do sistema encontra-se do ponto -1.0+j0.0. 8
9 Diagrama Polar Observa-se a proximidade da curva de resposta em freqüência do sistema operando em malha aberta com o ponto j0.0 no plano G(j )H(j ). Diagrama de Bode Módulo 1.0 (0 db) Fase 180º. 9
10 A proximidade da curva de resposta em frequência do sistema operando em malha aberta ao ponto em questão será avaliada em módulo em fase através de duas medidas definidas como margem de ganho margem de fase 10
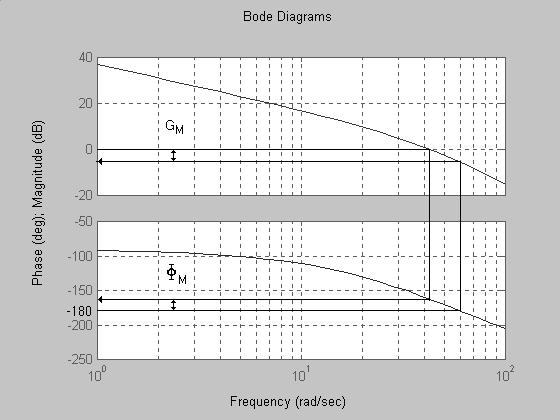
11 Margem de Ganho - G M É a faixa de ganho que se pode incrementar ou decrementar a curva de resposta em freqüência de módulo da função de transferência de malha aberta (de laço) de um sistema até que se alcance o ponto de estabilidade crítica. 11
12 Margem de Ganho Sistemas e Sinais M é a freqüência em que a fase de G(j )H(j ) é igual a 180 º. 12
13 Margens de Fase - Φ M É o valor angular a ser acrescido ou decrescido à curva de fase da resposta em freqüência de um sistema operando em malha aberta na freqüência em que a curva de módulo da resposta em freqüência deste mesmo sistema apresenta valor unitário (ou 0.0 db). 13
14 Margens de Fase - Φ M 0dB a freqüência em que o módulo de G(j )H(j ) é igual 1 (0.0 db). 14
15 Margens de Estabilidade Informações associadas as Margens de Ganho e de Fase podem ser obtidas diretamente dos diagramas Bode Polar 15
16 16
17 17
18 Exercícios: Sistemas e Sinais Considere o diagrama de Blocos apresentado a seguir: 18
19 Exercícios: Admitindo Sistemas e Sinais e K=1.0, e K=10.0, fazer a análise de estabilidade utilizando o critério de Nyquist. Para cada uma das situações de ganho, determinar analítica e graficamente as margens de fase e de ganho. 19
20 Exercícios: Admitindo Sistemas e Sinais e K=100.0, e K=1000.0, fazer a análise de estabilidade utilizando o critério de Nyquist. Para cada uma das situações de ganho, determinar analítica e graficamente as margens de fase e de ganho. 20
23/04/2018. Estabilidade de Circuitos com AMPOP
 Estabilidade de Circuitos com AMPOP 1 Estabilidade de Circuitos com AMPOP Função de transferência em malha fechada Hipóteses: ganho CC constante pólos e zeros em altas freqüências (s) constante em baixas
Estabilidade de Circuitos com AMPOP 1 Estabilidade de Circuitos com AMPOP Função de transferência em malha fechada Hipóteses: ganho CC constante pólos e zeros em altas freqüências (s) constante em baixas
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica. Sistemas de Controle Realimentados
 Critério de Estabilidade de Nyquist Introdução Princípio do Argumento Contorno de Nyquist Exemplos Problemas Propostos 1 Critério de Estabilidade de Nyquist { Estabilidade absoluta Estudo de Estabilidade
Critério de Estabilidade de Nyquist Introdução Princípio do Argumento Contorno de Nyquist Exemplos Problemas Propostos 1 Critério de Estabilidade de Nyquist { Estabilidade absoluta Estudo de Estabilidade
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
Conteúdo. Definições básicas;
 Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA
 VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
Análise da Resposta em Frequência
 Análise da Resposta em Frequência Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 6 de dezembro de 2016 Sumário 1 Introdução 2 Resposta
Análise da Resposta em Frequência Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 6 de dezembro de 2016 Sumário 1 Introdução 2 Resposta
Sumário. CAPÍTULO 1 Introdução 1. CAPÍTULO 2 Terminologia dos Sistemas de Controle 14
 Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Aula 19: Projeto de controladores no domínio da frequência
 Aula 19: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 14 de novembro de 2017. prof. Dr. Eduardo Bento Pereira
Aula 19: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 14 de novembro de 2017. prof. Dr. Eduardo Bento Pereira
Capítulo 10. Técnicas de Resposta de Freqüência
 Capítulo 10 Técnicas de Resposta de Freqüência Fig.10.1 O Analisador Dinâmico de Sinal HP 35670A obtém dados de resposta de freqüência de um sistema físico. Os dados exibidos podem ser usados para analisar,
Capítulo 10 Técnicas de Resposta de Freqüência Fig.10.1 O Analisador Dinâmico de Sinal HP 35670A obtém dados de resposta de freqüência de um sistema físico. Os dados exibidos podem ser usados para analisar,
DIAGRAMAS DE BODE, NYQUIST E NICHOLS
 DIAGRAMAS DE BODE, NYQUIST E NICHOLS Os diagramas de resposta em freqüência são muito úteis para analisar a estabilidade de um sistema realimentado. Existem 3 formas de analisar a resposta em freqüência
DIAGRAMAS DE BODE, NYQUIST E NICHOLS Os diagramas de resposta em freqüência são muito úteis para analisar a estabilidade de um sistema realimentado. Existem 3 formas de analisar a resposta em freqüência
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
 Estabilidade Estabilidade é um comportamento desejado em qualquer sistema físico. Sistemas instáveis tem comportamento, na maioria das vezes, imprevisível; por isso é desejável sempre garantirmos a estabilidade
Estabilidade Estabilidade é um comportamento desejado em qualquer sistema físico. Sistemas instáveis tem comportamento, na maioria das vezes, imprevisível; por isso é desejável sempre garantirmos a estabilidade
EES-49/2012 Resolução da Prova 3. 1 Dada a seguinte função de transferência em malha aberta: ( s 10)
") EES-49/2012 Resolução da Prova 3 1 Dada a seguinte função de transferência em malha aberta: ( s 10) Gs () ss ( 10) a) Esboce o diagrama de Nyquist e analise a estabilidade do sistema em malha fechada com
EES-49/2012 Resolução da Prova 3 1 Dada a seguinte função de transferência em malha aberta: ( s 10) Gs () ss ( 10) a) Esboce o diagrama de Nyquist e analise a estabilidade do sistema em malha fechada com
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA DIAGRAMAS DE BODE
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA 1. INTRODUÇÃO DIAGRAMAS DE BODE Para explicar os diagramas de Bode, vamos fazer, inicialmente, uma
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA 1. INTRODUÇÃO DIAGRAMAS DE BODE Para explicar os diagramas de Bode, vamos fazer, inicialmente, uma
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA
 CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
O critério de Nyquist
 O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
Controle 2 - Introdução
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 28 de outubro de 2013 Permanência 5 as e 6 as pela manhã Agendar com antecedência moritz@utfpr.edu.br http://paginapessoal.utfpr.edu.br/moritz
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 28 de outubro de 2013 Permanência 5 as e 6 as pela manhã Agendar com antecedência moritz@utfpr.edu.br http://paginapessoal.utfpr.edu.br/moritz
Margem de Ganho e Margem de Fase Diagrama de Nichols
 Departamento de Engenharia Química e de Petróleo UFF Margem de Ganho e Margem de Fase Diagrama de Nichols Outros Processos de Separação Critério de Estabilidade de Desenvolvido por Harry (1932) nos laboratórios
Departamento de Engenharia Química e de Petróleo UFF Margem de Ganho e Margem de Fase Diagrama de Nichols Outros Processos de Separação Critério de Estabilidade de Desenvolvido por Harry (1932) nos laboratórios
Introdução Diagramas de Bode Gráficos Polares Gráfico de Amplitude em db Versus Fase. Aula 14. Cristiano Quevedo Andrea 1
 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro 2012. 1 / 48 Resumo 1 Introdução 2 Diagramas de Bode 3
Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro 2012. 1 / 48 Resumo 1 Introdução 2 Diagramas de Bode 3
Métodos de Resposta em Frequência Parte 1. Controle de Sistemas Renato Dourado Maia (Unimontes)
") Métodos de Resposta em Frequência Parte 1 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Introdução Os métodos de resposta em frequência, desenvolvidos por Nyquist e Bode nos anos 30, são mais
Métodos de Resposta em Frequência Parte 1 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Introdução Os métodos de resposta em frequência, desenvolvidos por Nyquist e Bode nos anos 30, são mais
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Controle e servomecanismo TE240 Análise no domínio da frequência. Juliana L. M. Iamamura
 Controle e servomecanismo TE240 Análise no domínio da frequência Juliana L. M. Iamamura Análise no domínio da frequência Projetos simples Não é necessário conhecer polos e zeros Sinais decompostos em somas
Controle e servomecanismo TE240 Análise no domínio da frequência Juliana L. M. Iamamura Análise no domínio da frequência Projetos simples Não é necessário conhecer polos e zeros Sinais decompostos em somas
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
SCILAB: MÓDULO 4 SISTEMAS E CONTROLE
 SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab 5.3.3 Dr.ª Eng.ª Mariana Santos Matos Cavalca O que é controlar? Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios)
SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab 5.3.3 Dr.ª Eng.ª Mariana Santos Matos Cavalca O que é controlar? Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios)
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA. Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
Princípios de Controle Robusto
 Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
EES-49/2012 Prova 1. Q1 Dado o seguinte conjunto de equações:
 Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
Pólos, Zeros e Estabilidade
 Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
(c) G d (z) = (d) G d (z) = A função de transferência do equivalente por invariância da resposta impulsional é = Z
 G d (z) = (d) G d (z) = A função de transferência do equivalente por invariância da resposta impulsional é = Z") Parte I Escolha múltipla h Tópicos de resolução A função de transferência do sistema cuja resposta ao degrau unitário está representada na figura é 8 (a) G(s) = s + 6s + 4 8 (b) G(s) = s + 4s + 4 8 (c)
Parte I Escolha múltipla h Tópicos de resolução A função de transferência do sistema cuja resposta ao degrau unitário está representada na figura é 8 (a) G(s) = s + 6s + 4 8 (b) G(s) = s + 4s + 4 8 (c)
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência 1. Estabilidade relativa e o critério de Nyquist: margens de ganho e fase 2. Critérios de desempenho especificados no domínio da freqüência Resposta em freqüência
Estabilidade no Domínio da Freqüência 1. Estabilidade relativa e o critério de Nyquist: margens de ganho e fase 2. Critérios de desempenho especificados no domínio da freqüência Resposta em freqüência
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
 O método das frações parciais usa o conhecimento de diversos pares de transformada Z básicos e as propriedades da transformada Z para obtenção da transformada Z inversa das funções de interesse Admite-se
O método das frações parciais usa o conhecimento de diversos pares de transformada Z básicos e as propriedades da transformada Z para obtenção da transformada Z inversa das funções de interesse Admite-se
Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab
 Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab I Análise de sistema com atraso Considere o sistema realimentado da figura (exercício da aula prática nº 1) e Ts G p onde era indicado que a planta
Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab I Análise de sistema com atraso Considere o sistema realimentado da figura (exercício da aula prática nº 1) e Ts G p onde era indicado que a planta
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist
 Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
1 Controlabilidade, observabilidade e estabilidade de sistemas em tempo contínuo
 Rio de Janeiro, 24 de março de 2006. 1 a Lista de Exercícios de Controle e Servomecanismos II Tópicos: autovalores, estabilidade, controlabilidade, observabilidade, realimentação de estado e observadores
Rio de Janeiro, 24 de março de 2006. 1 a Lista de Exercícios de Controle e Servomecanismos II Tópicos: autovalores, estabilidade, controlabilidade, observabilidade, realimentação de estado e observadores
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II PROF. MARCOS LAJOVIC CARNEIRO - 2017/1 Turma A01/1 PLANO
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II PROF. MARCOS LAJOVIC CARNEIRO - 2017/1 Turma A01/1 PLANO
Método de Margem de Ganho
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS custo Método de Margem de Ganho Outros Processos e de de Fase Separação Prof a Ninoska Bojorge Resposta de
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS custo Método de Margem de Ganho Outros Processos e de de Fase Separação Prof a Ninoska Bojorge Resposta de
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Planejamento da disciplina
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic Carneiro Planejamento da disciplina
CAP. 3 REALIMENTAÇÃO
 CP. 3 ELMENTÇÃO NTODUÇÃO ealimentação: uma amostra do sinal de saída é incorporada à entrada ealimentação: Positiva (regenerativa) Negativa (degenerativa) antagens da realimentação negativa Estabilização
CP. 3 ELMENTÇÃO NTODUÇÃO ealimentação: uma amostra do sinal de saída é incorporada à entrada ealimentação: Positiva (regenerativa) Negativa (degenerativa) antagens da realimentação negativa Estabilização
EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018
 COTAÇÕES TESTE N0.2 Q3-3.1 [3v], 3.2 [2v], 3.3 [2v], 3.4 [1v] Q4-4.1 [6v], 4.2 [2v], 4.3 [3v], 4.4 [1v] EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018 8 valores 12 valores EXAME Q1-1.1 [1v],
COTAÇÕES TESTE N0.2 Q3-3.1 [3v], 3.2 [2v], 3.3 [2v], 3.4 [1v] Q4-4.1 [6v], 4.2 [2v], 4.3 [3v], 4.4 [1v] EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018 8 valores 12 valores EXAME Q1-1.1 [1v],
Método de Nyquist. definições propriedades (Teorema de Cauchy) estabilidade Relativa. Margem de Ganho Margem de Fase
 estabilidade Relativa. Margem de Ganho Margem de Fase") Método de Nyquist M O T I V A Ç Ã O F U N Ç Õ E S C O M P L E X A S definições propriedades (Teorema de Cauchy) C A M I N H O D E N Y Q U I S T D I A G R A M A S D E N Y Q U I S T C R I T É R I O D E E
Método de Nyquist M O T I V A Ç Ã O F U N Ç Õ E S C O M P L E X A S definições propriedades (Teorema de Cauchy) C A M I N H O D E N Y Q U I S T D I A G R A M A S D E N Y Q U I S T C R I T É R I O D E E
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Pontifícia Universidade Católica de Goiás Escola de Engenharia. Aluno (a): Aula Laboratório 07 Cap 10 Método de Resposta em Frequência
: Aula Laboratório 07 Cap 10 Método de Resposta em Frequência") Pontifícia Universidade Católica de Goiás Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Marcos Lajovic Carneiro 07 Aluno (a): Aula Laboratório 07 Cap 10 Método de Resposta em Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Marcos Lajovic Carneiro 07 Aluno (a): Aula Laboratório 07 Cap 10 Método de Resposta em Frequência
UNIVERSIDADE DO ALGARVE
 UNIVERSIDADE DO ALGARVE FACULDADE DE CIÊNCIAS E TECNOLOGIA Departamento de Engenharia Electrónica e Informática SISTEMAS DE CONTROLO Problemas Ano lectivo de 20062007 Licenciatura em Engenharia de Sistemas
UNIVERSIDADE DO ALGARVE FACULDADE DE CIÊNCIAS E TECNOLOGIA Departamento de Engenharia Electrónica e Informática SISTEMAS DE CONTROLO Problemas Ano lectivo de 20062007 Licenciatura em Engenharia de Sistemas
EES-20: Sistemas de Controle II. 20 Outubro 2017 (Tarde)
") EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
UNIVERSIDADE ESTADUAL PAULISTA Júlio de Mesquita Filho Campus Experimental de Sorocaba
 PLANO DE ENSINO UNIDADE: CURSO: Engenharia de Controle e Automação HABILITAÇÃO: Controle e Automação OPÇÃO: - DEPARTAMENTO: - IDENTIFICAÇÃO: CÓDIGO: ITC DISCIPLINA: INTRODUÇÃO À TEORIA DE CONTROLE SERIAÇÃO
PLANO DE ENSINO UNIDADE: CURSO: Engenharia de Controle e Automação HABILITAÇÃO: Controle e Automação OPÇÃO: - DEPARTAMENTO: - IDENTIFICAÇÃO: CÓDIGO: ITC DISCIPLINA: INTRODUÇÃO À TEORIA DE CONTROLE SERIAÇÃO
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES A função de transferência do circuito abaixo em malha fechada é: F(s) = C(s) = G(s)
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES A função de transferência do circuito abaixo em malha fechada é: F(s) = C(s) = G(s)
Indice Introdução Sistemas contínuos descritos por equações diferenciais lineares de coeficientes constantes... 75
 , Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
, Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- G 4 (s) = G 2 5 (s) = (s+5) G 6 (s) =
 = G 2 5 (s) = (s+5) G 6 (s) =") ENG04035 - Sistemas de Controle I Prof. João Manoel e Prof. Romeu LISTA DE EXERCÍCIOS 2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- 1. Considere os seguintes processos: 5 1 G 1 (s) = (s2)(s10)
ENG04035 - Sistemas de Controle I Prof. João Manoel e Prof. Romeu LISTA DE EXERCÍCIOS 2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- 1. Considere os seguintes processos: 5 1 G 1 (s) = (s2)(s10)
Projeto de Compensadores no Domínio da Frequência
 Projeto de Compensadores no Domínio da Frequência Maio de 214 Loop Shaping I No projeto de compensadores no domínio da frequência, parte-se do pressuposto de que o sistema a ser controlado pode ser representado
Projeto de Compensadores no Domínio da Frequência Maio de 214 Loop Shaping I No projeto de compensadores no domínio da frequência, parte-se do pressuposto de que o sistema a ser controlado pode ser representado
Nyquist, Função de Sensibilidade e Desempenho Nominal
 Nyquist, Função de Sensibilidade e Desempenho Nominal 1. Revisitando o critério de estabilidade de Nyquist 1.1. Margens de ganho e de fase 2. Erro de rastreamento e função de sensibilidade 2.1. Vetor de
Nyquist, Função de Sensibilidade e Desempenho Nominal 1. Revisitando o critério de estabilidade de Nyquist 1.1. Margens de ganho e de fase 2. Erro de rastreamento e função de sensibilidade 2.1. Vetor de
ENGENHARIA DE CONTROLE
 ENGENHARIA DE CONTROLE Prof. Reinaldo M. Palhares Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/controlelinear.html Terças- e Quintas-Feiras 07h30 a 09h10 Aspectos
ENGENHARIA DE CONTROLE Prof. Reinaldo M. Palhares Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/controlelinear.html Terças- e Quintas-Feiras 07h30 a 09h10 Aspectos
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
Erro em regime permanente em sistema de controle com
 Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA
 OGATA") RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
Guião do Trabalho Laboratorial Nº 1 Introdução ao MATLAB v7.1. GRIS Group of Robotics and Intelligent Systems
 SISEL Sistemas Electromecânicos Guião do Trabalho Laboratorial Nº 1 Introdução ao MATLAB v7.1 Análise de um Servomecanismo de Posição GRIS Group of Robotics and Intelligent Systems Homepage: http://www.dee.isep.ipp.pt/~gris
SISEL Sistemas Electromecânicos Guião do Trabalho Laboratorial Nº 1 Introdução ao MATLAB v7.1 Análise de um Servomecanismo de Posição GRIS Group of Robotics and Intelligent Systems Homepage: http://www.dee.isep.ipp.pt/~gris
CA2COD1: COD CONTROLE DIGITAL. Profa. Mariana Cavalca
 CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos LUGAR DAS RAÍZES INTRODUÇÃO O método do Lugar das Raízes é uma
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos LUGAR DAS RAÍZES INTRODUÇÃO O método do Lugar das Raízes é uma
Entradas sinusoidais
 Carla C. Pinheiro e F. Lemos Dinâmica de Sistemas e Controlo de Processos DEQB - IST Entradas sinusoidais U(s) G(s) Y(s) Estudar a resposta de um sistema linear estável para alterações do tipo sinusoidal
Carla C. Pinheiro e F. Lemos Dinâmica de Sistemas e Controlo de Processos DEQB - IST Entradas sinusoidais U(s) G(s) Y(s) Estudar a resposta de um sistema linear estável para alterações do tipo sinusoidal
1. IDENTIFICAÇÃO DA DISCIPLINA
 1. IDENTIFICAÇÃO DA DISCIPLINA CURSO: FT02-T PERÍODO LETIVO: 2017/2 TURMA: 01 DISCIPLINA: Sistema de Controle SIGLA: FTE029 CARGA HORÁRIA TOTAL: 90 CRÉDITOS: 6 TEÓRICA: 90 PRÁTICA: 0 PRÉ-REQUISITO: FTE008
1. IDENTIFICAÇÃO DA DISCIPLINA CURSO: FT02-T PERÍODO LETIVO: 2017/2 TURMA: 01 DISCIPLINA: Sistema de Controle SIGLA: FTE029 CARGA HORÁRIA TOTAL: 90 CRÉDITOS: 6 TEÓRICA: 90 PRÁTICA: 0 PRÉ-REQUISITO: FTE008
MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA
 MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA PROJETO NOS PLANOS W e W' As técnicas de projeto no plano s tem sido utilizadas com
MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA PROJETO NOS PLANOS W e W' As técnicas de projeto no plano s tem sido utilizadas com
Análises, interpretações e soluções de algumas questões do ENADE por: Prof. José Roberto Marques. Docente da Universidade de Mogi das Cruzes
 Análises, interpretações e soluções de algumas questões do ENADE por: Prof. José Roberto Marques Docente da Universidade de Mogi das Cruzes a) Para o sistema ser estável, todos os polos do mesmo devem
Análises, interpretações e soluções de algumas questões do ENADE por: Prof. José Roberto Marques Docente da Universidade de Mogi das Cruzes a) Para o sistema ser estável, todos os polos do mesmo devem
Sistemas lineares. Aula 3 Sistemas Lineares Invariantes no Tempo
 Sistemas lineares Aula 3 Sistemas Lineares Invariantes no Tempo SLIT Introdução Resposta de um SLIT Resposta de Entrada Nula Resposta de Estado Nulo Resposta ao Impulso Unitária Introdução Sistemas: Modelo
Sistemas lineares Aula 3 Sistemas Lineares Invariantes no Tempo SLIT Introdução Resposta de um SLIT Resposta de Entrada Nula Resposta de Estado Nulo Resposta ao Impulso Unitária Introdução Sistemas: Modelo
Análise de Sistemas no Domínio da Freqüência. Diagrama de Bode
 Análise de Sistemas no Domínio da Freqüência Diagrama de Bode Análise na Freqüência A análise da resposta em freqüência compreende o estudo do comportamento de um sistema dinâmico em regime permanente,
Análise de Sistemas no Domínio da Freqüência Diagrama de Bode Análise na Freqüência A análise da resposta em freqüência compreende o estudo do comportamento de um sistema dinâmico em regime permanente,
Aplicações de Conversores Estáticos de Potência
 Universidade Federal do ABC Pós-graduação em Engenharia Elétrica Aplicações de Conversores Estáticos de Potência José L. Azcue Puma, Prof. Dr. Conversores CC/CC Função de transferência Projeto do compensador
Universidade Federal do ABC Pós-graduação em Engenharia Elétrica Aplicações de Conversores Estáticos de Potência José L. Azcue Puma, Prof. Dr. Conversores CC/CC Função de transferência Projeto do compensador
Mario Campos, Dr.ECP PETROBRÁS/CENPES. Engenharia Básica em Automação e Otimização de Processos (EB/AOT)
") Controle Regulatório Avançado e Sintonia de Controladores PID Mario Campos, Dr.ECP PETROBRÁS/CENPES Engenharia Básica em Automação e Otimização de Processos (EB/AOT) e-mail: mariocampos@petrobras petrobras.com..com.br
Controle Regulatório Avançado e Sintonia de Controladores PID Mario Campos, Dr.ECP PETROBRÁS/CENPES Engenharia Básica em Automação e Otimização de Processos (EB/AOT) e-mail: mariocampos@petrobras petrobras.com..com.br
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE
 RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
IV. ESTABILIDADE DE SISTEMAS LIT
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Diagramas de Bode. Introdução
 Diagramas de Bode Introdução Sistemas e Sinais Diagramas de Bode Escala Logarítmica de Amplitude Escala Logarítmica de Frequência Análise dos Termos das Funções de Resposta em Frequência Composição do
Diagramas de Bode Introdução Sistemas e Sinais Diagramas de Bode Escala Logarítmica de Amplitude Escala Logarítmica de Frequência Análise dos Termos das Funções de Resposta em Frequência Composição do
Resposta em Frequência
 Resposta em Frequência G( s) = s 2 1 +,5s + 1 2 2.5 Nyquist Diagram 2-2 -4-6 -8 Imaginary Axis 1.5 1.5 -.5-9 -1-1.5-2 -18 1-2 1-1 1 1 1 1 2 Frequency (rad/sec) -2.5-1 -.5.5 1 1.5 Real Axis 1 Mapeamento
Resposta em Frequência G( s) = s 2 1 +,5s + 1 2 2.5 Nyquist Diagram 2-2 -4-6 -8 Imaginary Axis 1.5 1.5 -.5-9 -1-1.5-2 -18 1-2 1-1 1 1 1 1 2 Frequency (rad/sec) -2.5-1 -.5.5 1 1.5 Real Axis 1 Mapeamento
Teoria de Controle. Helio Voltolini
 Teoria de Controle Helio Voltolini Conteúdo programático Introdução aos sistemas de controle; Modelagem matemática de sistemas dinâmicos; Resposta transitória de sistemas de controle; Estabilidade dos
Teoria de Controle Helio Voltolini Conteúdo programático Introdução aos sistemas de controle; Modelagem matemática de sistemas dinâmicos; Resposta transitória de sistemas de controle; Estabilidade dos
Descrição de Incertezas e Estabilidade Robusta
 Descrição de Incertezas e Estabilidade Robusta 1. Estabilidade robusta? 1.1. Função de transferência nominal e critério de estabilidade robusta 2. Caracterizando modelos de incertezas não-estruturadas
Descrição de Incertezas e Estabilidade Robusta 1. Estabilidade robusta? 1.1. Função de transferência nominal e critério de estabilidade robusta 2. Caracterizando modelos de incertezas não-estruturadas
Controle de Processos Aula 14: Critério de Estabilidade (Bode)
") 107484 Controle de Processos Aula 14: Critério de Estabilidade (Bode) Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2018 E. S. Tognetti (UnB)
107484 Controle de Processos Aula 14: Critério de Estabilidade (Bode) Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2018 E. S. Tognetti (UnB)
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO. CURSO Engenharia Elétrica MATRIZ 548
 Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 003/11, aprovado pela Resolução n.
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 003/11, aprovado pela Resolução n.
CA2COD1: COD CONTROLE DIGITAL. Profa. Mariana Cavalca
 CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
Controle de Processos Aula: Estabilidade e Critério de Routh
 107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
FUNDAMENTOS DE CONTROLE - EEL 7531
 Soluções periódicas e ciclos limite Funções descritivas FUNDAMENTOS DE CONTROLE - EEL 7531 Professor: Aguinaldo S. e Silva LABSPOT-EEL-UFSC 9 de junho de 2015 Professor: Aguinaldo S. e Silva FUNDAMENTOS
Soluções periódicas e ciclos limite Funções descritivas FUNDAMENTOS DE CONTROLE - EEL 7531 Professor: Aguinaldo S. e Silva LABSPOT-EEL-UFSC 9 de junho de 2015 Professor: Aguinaldo S. e Silva FUNDAMENTOS
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Descrição de Sistemas LTI por Variáveis de Estados 1
 Descrição de Sistemas LTI por Variáveis de Estado Os estados de um sistema podem ser definidos como o conjunto mínimo de sinais que descrevem o comportamento dinâmico do sistema. Sendo assim, dado o valor
Descrição de Sistemas LTI por Variáveis de Estado Os estados de um sistema podem ser definidos como o conjunto mínimo de sinais que descrevem o comportamento dinâmico do sistema. Sendo assim, dado o valor
Sistemas de Controle
 Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 8 - Resposta em Frequência Sistemas de Controle p. 1/46 Introdução Método da Resposta em Frequência Análise do sistema a partir da resposta
Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 8 - Resposta em Frequência Sistemas de Controle p. 1/46 Introdução Método da Resposta em Frequência Análise do sistema a partir da resposta
Aspectos Operacionais
 67 Aspectos Operacionais Esta aula vai abordar 4 aspectos de grande importância prática: 1. Estabilidade robusta que cuidados deveremos ter na especificação da função de transferência em malha fechada
67 Aspectos Operacionais Esta aula vai abordar 4 aspectos de grande importância prática: 1. Estabilidade robusta que cuidados deveremos ter na especificação da função de transferência em malha fechada
SEM Sistemas de Controle I Aula 1 - Introdução
 SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
Modelagem e Controle de Conversores
 INSTITUTO FEDERAL DE SANTA CATARINA Departamento Acadêmico de Eletrônica Pós-Graduação em Desenvolvimento de Produtos Eletrônicos Conversores Estáticos e Fontes Chaveadas Modelagem e Controle de Conversores
INSTITUTO FEDERAL DE SANTA CATARINA Departamento Acadêmico de Eletrônica Pós-Graduação em Desenvolvimento de Produtos Eletrônicos Conversores Estáticos e Fontes Chaveadas Modelagem e Controle de Conversores
Função de Transferência do Amplificador re- alimentado
 p. 1/2 Resumo Efeito da Realimentação nos Pólos do Amplificador Amplificador só com um Pólo Amplificador com dois Pólos Amplificador com três ou mais Pólos Estabilidade usando Diagramas de Bode Compensação
p. 1/2 Resumo Efeito da Realimentação nos Pólos do Amplificador Amplificador só com um Pólo Amplificador com dois Pólos Amplificador com três ou mais Pólos Estabilidade usando Diagramas de Bode Compensação
SEM Sistemas de Controle I Aula 1 - Introdução
 SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
SEM Sistemas de Controle Aula 1 - Introdução
 SEM 5928 - Sistemas de Controle Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 5928 - Sistemas de Controle Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
Critério de Estabilidade: Routh-Hurwitz
 Critério de Estabilidade: Routh-Hurwitz O Critério de Nyquist foi apresentado anteriormente para determinar a estabilidade de um sistema em malha fechada analisando-se sua função de transferência em malha
Critério de Estabilidade: Routh-Hurwitz O Critério de Nyquist foi apresentado anteriormente para determinar a estabilidade de um sistema em malha fechada analisando-se sua função de transferência em malha
Controlo 4.ª AULA. Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente
 Docente") Escola Superior de Tecnologia de Setúbal Controlo 4.ª AULA Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente Prof.ª Sónia Marques
Escola Superior de Tecnologia de Setúbal Controlo 4.ª AULA Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente Prof.ª Sónia Marques
Aula 9. Diagrama de Bode
 Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Modelagem e Análise de um Sistema de Excitação Convencional
 Modelagem e Análise de um Sistema de Excitação Convencional Prof. Antonio Simões Costa Grupo Sist. Potência - UFSC A. Simões Costa (GSP/UFSC) Model. e Anál. Sist. Exc. 1 / 19 Sistema de excitação com ampli
Modelagem e Análise de um Sistema de Excitação Convencional Prof. Antonio Simões Costa Grupo Sist. Potência - UFSC A. Simões Costa (GSP/UFSC) Model. e Anál. Sist. Exc. 1 / 19 Sistema de excitação com ampli
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 3 a Série (root-locus, análise e projecto no plano-s) As questões assinaladas com * serão abordadas na correspondente aula
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 3 a Série (root-locus, análise e projecto no plano-s) As questões assinaladas com * serão abordadas na correspondente aula
CONTROLO. 3º ano 1º semestre Transparências de apoio às aulas teóricas. Capítulo Projecto Nyquist/Bode
 CONROLO 3º ano º semestre 202-203 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
CONROLO 3º ano º semestre 202-203 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
Universidade de Brasília CONTROLE DIGITAL - 2 /2010 ENE/FT/UnB Terça-Feira, 14 de dezembro de 2010,
 Departamento de Engenharia Elétrica Prof. Adolfo Bauchspiess Faculdade de Tecnologia http://www.ene.unb.br/adolfo/cdig Universidade de Brasília 64887 CONTROLE DIGITAL - / ENE/FT/UnB Terça-Feira, 4 de dezembro
Departamento de Engenharia Elétrica Prof. Adolfo Bauchspiess Faculdade de Tecnologia http://www.ene.unb.br/adolfo/cdig Universidade de Brasília 64887 CONTROLE DIGITAL - / ENE/FT/UnB Terça-Feira, 4 de dezembro
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência 1. Motivação 2. Mapas de contorno no Plano-s 3. Critério de Nyquist pag.1 Controle de Sistemas Lineares Aula 16 Estabilidade no Domínio da Freqüência Como analisar
Estabilidade no Domínio da Freqüência 1. Motivação 2. Mapas de contorno no Plano-s 3. Critério de Nyquist pag.1 Controle de Sistemas Lineares Aula 16 Estabilidade no Domínio da Freqüência Como analisar
1:9 2 a PROVA CONTROLE DINÂMICO - 1 /2017
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta, Faculdade de Tecnologia Só é permitido/necessário calculadora simples, Universidade de Brasília (operações com números complexos)
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta, Faculdade de Tecnologia Só é permitido/necessário calculadora simples, Universidade de Brasília (operações com números complexos)
Controle de Sistemas Dinâmicos. Informações básicas
 Controle de Sistemas Dinâmicos Informações básicas Endereço com material http://sites.google.com/site/disciplinasrgvm/ Ementa Modelagem de Sistemas de Controle; Sistemas em Malha Aberta e em Malha Fechada;
Controle de Sistemas Dinâmicos Informações básicas Endereço com material http://sites.google.com/site/disciplinasrgvm/ Ementa Modelagem de Sistemas de Controle; Sistemas em Malha Aberta e em Malha Fechada;