Medidas Mecânicas UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA. Prof. Leopoldo de Oliveira
|
|
|
- Luzia Bugalho Weber
- 6 Há anos
- Visualizações:
Transcrição
1 UNIVRSIDAD D SÃO PAULO SCOLA D NGNHARIA D SÃO CARLOS DPARTAMNTO D NGNHARIA MCÂNICA Medids Mecânics Prof. Leopoldo de Oliveir
2 Revisão st prte do curso se destin estudr dinâmic dos sensores mis comumente utilizdos em Vibrções e Análise Modl stes sensores tmbém podem ser utilizdos em outros mbientes, sej no monitormento industril, controle, etc. Aceleômetros crg IP (ICP ou DeltTron) Trnsdutores de forç



3 Acelerômetros
4
5 Modelo letro-mecânico

6 O Modelo de Sensibilidde à Crg V(t)
7 O Modelo de Sensibilidde à Crg Modelo létrico: C cl R f Posição b R q C t C c C - C f + R - + G G o Trnsdutor Cbo Amplificdor de Crg Amplificdor de Pdronizção
8

9 Curv típic de um sensor comercil
10 Fixção do Acelerômetro
11 Cuiddos: X Fit desiv feito Tirbo-elétrico: A vibrção do cbo pode gerr crgs por efeito tribo-elétrico. Tensão induzid n presenç de cmpos mgnéticos Momento de flexão pode ser trnsmitido pro sensor cusndo erros n medid
12 Trnsdutor de Forç





13 O Trnsdutor de Forç estrutur excitção

14 O Trnsdutor de Forç
 f (t) Bse c m m x c( x x ) k( x x) f( t x c( x x ) k( x x) f( t )")
15 Modelo Mecânico Mss Sísmic lemento Piezoelétrico f (t) m x (t) k m x (t) f (t) Bse c m m x c( x x ) k( x x) f( t x c( x x ) k( x x) f( t ) )
16
17 Clibrção
18 Crts de Cblibrção Nem sempre preciss dnos mbiente envelhecimento Não consider outros elementos d cdei
19 Clibrção de Sensores É o processo no qul um entrd conhecid é plicd à um ddo instrumento e su respost à est entrd é medid fim de se estbelecer s relções de entrd e síd pr o instrumento e obter su sensibilidde à tensão Serão borddos os seguintes métodos: Clibrção de sensores com entrd senoidl Clibrção de sensores com entrd trnsiente stes procedimentos serão plicdos n clibrção de celerômetros e trnsdutores de forç
 Montgem dequd")
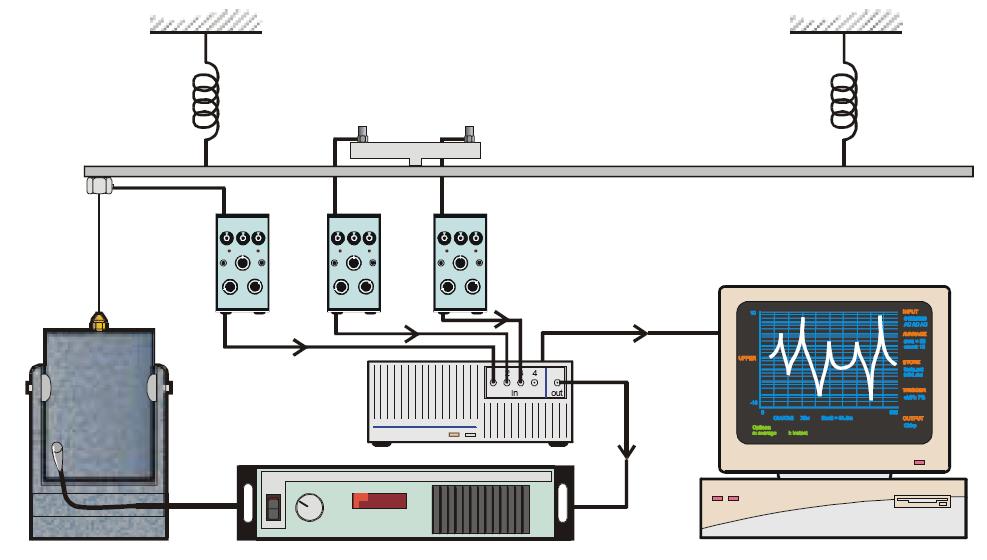
20 Clibrção de celerômetros - entrd senoidl Frequentemente chmd de clibrção bck to bck Sensibilidde do celerômetro de referênci deve ser mntid constnte: use um bom cel de clibrção! xcitdor de bo qulidde (rmdur estável) Montgem dequd
21 Clibrção de celerômetros - entrd trnsiente Mis conhecid por clibrção grvimétric Tres etps: -) Posicionmento d mss rígid sobre o trnsdutor de forç -) Remoção súbt d mss rígid e posterior medição do sinl de forç do trnsdutor de forç: mg 3-) Qued livre d mss rígid e celerômetro sobre o trnsdutor de forç. Medição de f e Cilindro de ço Acelerômetro AC Osciloscópio AC Trnsdutor de forç
22 qucionmento etp: F mg W mg S mg f mg 3 etp: F S f f e g S ntão usndo-se: F mg g f S f f S mg f S S f mg S f De onde obtemos:


23 Clibrção de celerômetros - entrd senoidl f = 59.5 H z = g ,5
24 Clibrção de Trnsdutores de Forç - senoidl mss de clibrção P P AC AC k z c z m s m c W c + W s Digrm de corpo livre pr mss de clibrção f x
25 qução de movimento pr o trnsdutor: c z k z m x m x c s Tensões de síd pr o trnsdutor de forç e celerômetro: ' H S m g m g x f f ( ) f c s g H ( ) S x g Rzão de tensões elétrics: - W s f / S = S f / S - W c f ' H f ( ) S f S f ( ) c s H ( ) S S Pr m c >> m s : m g m g Wc Ws S f f S W c
26 Clibrção de Trnsdutores de Forç - trnsiente Neste cso, tensão de síd é dd por: Mrtelo de Impcto f (t) mss de clibrção m c m t AC f AC f m S f m m H f F S * ( ) f H f ( ) F * m S f m m S f Onde:
27 tmbém: Pr o celerômetro: H f ( ) j Tf j Tf r j r De cordo com segund lei de Newton: H ( ) S x g Obtem-se finlmente: f H H f ( ) ( ) S S * f m g c S * f H H f ( ) ( ) f S W c f S W c
28
29 Medindo GDL Rotcionis
30 Motivção,,,,,,,,,,,,,,,, M M F F H H H H H H H H H H H H H H H H y y q y y y y y y y y y y y y y y y y y x y x receptânci diret (trnslção) receptânci cruzd receptânci diret (rotção)

31 Motivção CONTROL D SISTMAS DINÂMICOS Isolção de fontes de vibrção

32 Sensores (Protótipos) Acelerômetro Trnslcionl/Rotcionl com elemento vig Acelerômetro Rotcionl com cristis piezelétricos

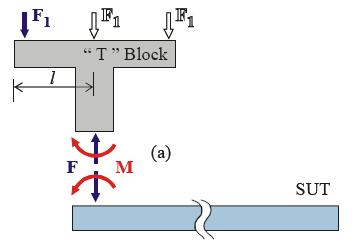
33 Método do bloco T
34 Método do bloco T L Trnslção: * x x x Rotção: ** x x x L L x x x Hipóteses: - Brr é rígid - Inérci despresível - peuqenos ângulos
35 Acelerômetros Combindos Montgem: G x x x Circuito: S v R R R R R R - + R 0 = + S v R - + R 0 = -
36 Deslocmento liner médio: x x x x Deslocmento ngulr médio: L L x x Tensão de síd pr cd trnsdutor: S S v v ) ( ) ( L S S S e S S S x S i Sensibilidde de cd trnsdutor S S vi i Hipóteses: Brr é rígid (e sem efeito sobre diinâmic d estrutur Movimentos ngulres Médios
37 Amplitude Método do bloco T Hipótese de corpo rígido é válid pr freqüênci bixo d ressonânci útil n 0 Freqüênci
38 Acelerômetro Piezoelétrico Liner - Angulr Distribuição de crgs ns piezovigs: y Poste Vigs piezoelétrics A C D B x Bse A, B, C, D conexões elétrics trnslcionl A B ngulr A B C D C D Bse y (+) Bse z (+)
39 Circuito elétrico: A C C -+ + S + = S s y B D C D = S s z trnsdutor cbo unidde de crg Tensões de síd: q q A/ C C B/ D C k k k y C k y C z z S S S y S 3 y 4 z z
40 Circuito elétrico: A C C -+ + S + = S s y B D C D = S s z trnsdutor cbo unidde de crg Tensões de síd: ( S S ) ( S S ) S 3 y 4 z y ( S S ) ( S S ) S 3 y 4 z z S = 000 mv / g S = 0,5, 5, 50 mv / rd / s
41
42 xemplo
![Amplitude [(rd/s )/N] xemplo](/docs-images/70/62237619/images/43-1.jpg "Teóric Bloco T Freqüênci")
43 Amplitude [(rd/s )/N] xemplo Teóric Bloco T Freqüênci [Hz]
![Amplitude [(rd/s )/N] xemplo](/docs-images/70/62237619/images/44-1.jpg "Teóric Acel.")
44 Amplitude [(rd/s )/N] xemplo Teóric Acel. ngulr Freqüênci [Hz]
![Amplitude [(rd/s )/N] xemplo](/docs-images/70/62237619/images/45-1.jpg "Bloco T Acel.")
45 Amplitude [(rd/s )/N] xemplo Bloco T Acel. ngulr Freqüênci [Hz]

46 xemplo
4.4 - Acelerômetros Combinados. Montagem: x 2. referência. Circuito: - + S v. a 1 = E 1 + E 2. a 2 -E 1 = E 2. Características de Sensores
 4.4 - Acelerômetros ombindos Montgem: G θ x x x ircuito: reerênci R R v R R R R R - + 0 + v R - + R 0-7 rcterístics de ensores Deslocmento liner médio: x x + x && x + Deslocmento ngulr médio: θ && θ x
4.4 - Acelerômetros ombindos Montgem: G θ x x x ircuito: reerênci R R v R R R R R - + 0 + v R - + R 0-7 rcterístics de ensores Deslocmento liner médio: x x + x && x + Deslocmento ngulr médio: θ && θ x
Sensores Piezelétricos
 UNIVRIDAD D ÃO PAULO COLA D NGNHARIA D ÃO CARLO DPARTAMNTO D NGNHARIA MCÂNICA ensores Piezelétricos Revisão st prte do curso se destin estudr dinâmic dos sensores mis comumente utilizdos em Análise Modl
UNIVRIDAD D ÃO PAULO COLA D NGNHARIA D ÃO CARLO DPARTAMNTO D NGNHARIA MCÂNICA ensores Piezelétricos Revisão st prte do curso se destin estudr dinâmic dos sensores mis comumente utilizdos em Análise Modl
Conversão de Energia II
 Deprtmento de ngenhri létric Aul 6. Máquins íncrons Prof. João Américo ilel Máquins íncrons Crcterístics vzio e de curto-circuito Curv d tensão terminl d rmdur vzio em função d excitção de cmpo. Crctéristic
Deprtmento de ngenhri létric Aul 6. Máquins íncrons Prof. João Américo ilel Máquins íncrons Crcterístics vzio e de curto-circuito Curv d tensão terminl d rmdur vzio em função d excitção de cmpo. Crctéristic
ROTAÇÃO DE CORPOS SOBRE UM PLANO INCLINADO
 Físic Gerl I EF, ESI, MAT, FQ, Q, BQ, OCE, EAm Protocolos ds Auls Prátics 003 / 004 ROTAÇÃO DE CORPOS SOBRE UM PLANO INCLINADO. Resumo Corpos de diferentes forms deslocm-se, sem deslizr, o longo de um
Físic Gerl I EF, ESI, MAT, FQ, Q, BQ, OCE, EAm Protocolos ds Auls Prátics 003 / 004 ROTAÇÃO DE CORPOS SOBRE UM PLANO INCLINADO. Resumo Corpos de diferentes forms deslocm-se, sem deslizr, o longo de um
O Amplificador Operacional
 UFSM CT DELC O Amplificdor Opercionl Prte I Giovni Brtto 6/26/2007 Introdução Neste texto, o mplificdor opercionl será considerdo como um cix pret. Estmos interessdos em compreender o seu funcionmento
UFSM CT DELC O Amplificdor Opercionl Prte I Giovni Brtto 6/26/2007 Introdução Neste texto, o mplificdor opercionl será considerdo como um cix pret. Estmos interessdos em compreender o seu funcionmento
Modelagem Matemática de Sistemas Eletromecânicos
 1 9 Modelgem Mtemátic de Sistems Eletromecânicos 1 INTRODUÇÃO Veremos, seguir, modelgem mtemátic de sistems eletromecânicos, ou sej, sistems que trtm d conversão de energi eletromgnétic em energi mecânic
1 9 Modelgem Mtemátic de Sistems Eletromecânicos 1 INTRODUÇÃO Veremos, seguir, modelgem mtemátic de sistems eletromecânicos, ou sej, sistems que trtm d conversão de energi eletromgnétic em energi mecânic
Física. , penetra numa lâmina de vidro. e sua velocidade é reduzida para v vidro = 3
 Questão 6 Um torre de ço, usd pr trnsmissão de televisão, tem ltur de 50 m qundo tempertur mbiente é de 40 0 C. Considere que o ço dilt-se, linermente, em médi, n proporção de /00.000, pr cd vrição de
Questão 6 Um torre de ço, usd pr trnsmissão de televisão, tem ltur de 50 m qundo tempertur mbiente é de 40 0 C. Considere que o ço dilt-se, linermente, em médi, n proporção de /00.000, pr cd vrição de
Plano Curricular Plano Curricular Plano Curricular
 Áre de formção 523. Eletrónic e Automção Curso de formção Técnico/ de Eletrónic, Automção e Comndo Nível de qulificção do QNQ 4 Componentes de Socioculturl Durção: 775 hors Científic Durção: 400 hors Plno
Áre de formção 523. Eletrónic e Automção Curso de formção Técnico/ de Eletrónic, Automção e Comndo Nível de qulificção do QNQ 4 Componentes de Socioculturl Durção: 775 hors Científic Durção: 400 hors Plno
Compensação de Sistemas Elétricos. Desequilíbrios e Compensação. Luís Carlos Origa de Oliveira
 Compensção de Sistems Elétricos Desequilíbrios e Compensção Luís Crlos Orig de Oliveir A Btlh dos Sistems Corrente Contínu Corrente Alternd X Edison Morgn Tesl Westinghouse questões científics envolvids
Compensção de Sistems Elétricos Desequilíbrios e Compensção Luís Crlos Orig de Oliveir A Btlh dos Sistems Corrente Contínu Corrente Alternd X Edison Morgn Tesl Westinghouse questões científics envolvids
Técnicas de Análise de Circuitos
 Coordendori de utomção Industril Técnics de nálise de Circuitos Eletricidde Gerl Serr 0/005 LIST DE FIGURS Figur - Definição de nó, mlh e rmo...3 Figur LKC...4 Figur 3 Exemplo d LKC...5 Figur 4 plicção
Coordendori de utomção Industril Técnics de nálise de Circuitos Eletricidde Gerl Serr 0/005 LIST DE FIGURS Figur - Definição de nó, mlh e rmo...3 Figur LKC...4 Figur 3 Exemplo d LKC...5 Figur 4 plicção
Plano Curricular Plano Curricular Plano Curricular
 Áre de formção 523. Eletrónic e Automção Curso de formção Técnico/ de Eletrónic, Automção e Comndo Nível de qulificção do QNQ 4 Componentes de Socioculturl Durção: 775 hors Científic Durção: 400 hors Plno
Áre de formção 523. Eletrónic e Automção Curso de formção Técnico/ de Eletrónic, Automção e Comndo Nível de qulificção do QNQ 4 Componentes de Socioculturl Durção: 775 hors Científic Durção: 400 hors Plno
Prova de Substitutiva Física 1 FCM Assinale com um x a prova que deseja substituir
 Prov de Substitutiv Físic 1 FCM 0501 013 Nome do Aluno Número USP Assinle com um x prov que desej substituir P1 P P3 Vlor ds Questões 1ª. ) 0,5 b) 1,0 c) 0,5 d) 0,5 ª.,5 3ª. ) 1,5 b) 1,5 4ª. ) 1,5 b) 1,5
Prov de Substitutiv Físic 1 FCM 0501 013 Nome do Aluno Número USP Assinle com um x prov que desej substituir P1 P P3 Vlor ds Questões 1ª. ) 0,5 b) 1,0 c) 0,5 d) 0,5 ª.,5 3ª. ) 1,5 b) 1,5 4ª. ) 1,5 b) 1,5
FLEXÃO E TENSÕES NORMAIS.
 LIST N3 FLEXÃO E TENSÕES NORMIS. Nos problems que se seguem, desprer o peso próprio (p.p.) d estrutur, menos qundo dito explicitmente o contrário. FÓRMUL GERL D FLEXÃO,: eixos centris principis M G N M
LIST N3 FLEXÃO E TENSÕES NORMIS. Nos problems que se seguem, desprer o peso próprio (p.p.) d estrutur, menos qundo dito explicitmente o contrário. FÓRMUL GERL D FLEXÃO,: eixos centris principis M G N M
Phoenix do Brasil Ltda.
 RESISTOR DE FIO AXIAL - AC CARACTERÍSTICAS Resistores de uso gerl Alt potênci em tmnho compcto Alto desempenho em plicções de pulso Váris opções de pré-form dos terminis Revestimento pr lt tempertur TECNOLOGIA
RESISTOR DE FIO AXIAL - AC CARACTERÍSTICAS Resistores de uso gerl Alt potênci em tmnho compcto Alto desempenho em plicções de pulso Váris opções de pré-form dos terminis Revestimento pr lt tempertur TECNOLOGIA
FORÇA LONGITUDINAL DE CONTATO NA RODA
 1 ORÇA LONGITUDINAL DE CONTATO NA RODA A rod é o elemento de vínculo entre o veículo e vi de tráfego que permite o deslocmento longitudinl, suportndo crg verticl e limitndo o movimento lterl. Este elemento
1 ORÇA LONGITUDINAL DE CONTATO NA RODA A rod é o elemento de vínculo entre o veículo e vi de tráfego que permite o deslocmento longitudinl, suportndo crg verticl e limitndo o movimento lterl. Este elemento
Eletrotécnica. Módulo III Parte I Motores CC. Prof. Sidelmo M. Silva, Dr. Sidelmo M. Silva, Dr.
 1 Eletrotécnic Módulo III Prte I Motores CC Prof. 2 3 Máquin CC Crcterístics Básics Muito versáteis (bos crcterístics conjugdo X velocidde) Elevdos conjugdos de prtid Aplicções em sistems de lto desempenho
1 Eletrotécnic Módulo III Prte I Motores CC Prof. 2 3 Máquin CC Crcterístics Básics Muito versáteis (bos crcterístics conjugdo X velocidde) Elevdos conjugdos de prtid Aplicções em sistems de lto desempenho
81,9(56,'$'( )('(5$/ '2 5,2 '( -$1(,52 &21&8562 '( 6(/(d 2 0$7(0É7,&$
('(5$/ '2 5,2 '( -$1(,52 &21&8562 '( 6(/(d 2 0$7(0É7,&$") 81,9(56,'$'( )('(5$/ ' 5, '( -$1(,5 &1&856 '( 6(/(d 0$7(0É7,&$ -867,),48( 7'$6 $6 68$6 5(667$6 De um retângulo de 18 cm de lrgur e 48 cm de comprimento form retirdos dois qudrdos de ldos iguis 7 cm, como
81,9(56,'$'( )('(5$/ ' 5, '( -$1(,5 &1&856 '( 6(/(d 0$7(0É7,&$ -867,),48( 7'$6 $6 68$6 5(667$6 De um retângulo de 18 cm de lrgur e 48 cm de comprimento form retirdos dois qudrdos de ldos iguis 7 cm, como
Quantidade de oxigênio no sistema
 EEIMVR-UFF Refino dos Aços I 1ª Verificção Junho 29 1. 1 kg de ferro puro são colocdos em um forno, mntido 16 o C. A entrd de oxigênio no sistem é controld e relizd lentmente, de modo ir umentndo pressão
EEIMVR-UFF Refino dos Aços I 1ª Verificção Junho 29 1. 1 kg de ferro puro são colocdos em um forno, mntido 16 o C. A entrd de oxigênio no sistem é controld e relizd lentmente, de modo ir umentndo pressão
PARTE I - Circuitos Resistivos Lineares
 Prolem 1.1 Leis de Kirchhoff PARTE I Circuitos Resistivos Lineres i 1 v 2 R 1 10A 1 R 2 Considere o circuito d figur 1.1. ) Constru o seu grfo e indique o número de rmos e de nós. ) Clcule os vlores ds
Prolem 1.1 Leis de Kirchhoff PARTE I Circuitos Resistivos Lineres i 1 v 2 R 1 10A 1 R 2 Considere o circuito d figur 1.1. ) Constru o seu grfo e indique o número de rmos e de nós. ) Clcule os vlores ds
Física III Escola Politécnica de maio de 2010
 P2 Questão 1 Físic - 4320203 Escol Politécnic - 2010 GABATO DA P2 13 de mio de 2010 Considere um cpcitor esférico formdo por um condutor interno de rio e um condutor externo de rio b, conforme figur. O
P2 Questão 1 Físic - 4320203 Escol Politécnic - 2010 GABATO DA P2 13 de mio de 2010 Considere um cpcitor esférico formdo por um condutor interno de rio e um condutor externo de rio b, conforme figur. O
Eletrotécnica TEXTO Nº 7
 Eletrotécnic TEXTO Nº 7 CIRCUITOS TRIFÁSICOS. CIRCUITOS TRIFÁSICOS EQUILIBRADOS E SIMÉTRICOS.. Introdução A quse totlidde d energi elétric no mundo é gerd e trnsmitid por meio de sistems elétricos trifásicos
Eletrotécnic TEXTO Nº 7 CIRCUITOS TRIFÁSICOS. CIRCUITOS TRIFÁSICOS EQUILIBRADOS E SIMÉTRICOS.. Introdução A quse totlidde d energi elétric no mundo é gerd e trnsmitid por meio de sistems elétricos trifásicos
FACULDADES OSWALDO CRUZ ESCOLA SUPERIOR DE QUÍMICA
 ULDDES OSWLDO RUZ ESOL SUERIOR DE QUÍMI DIÂMI ) rofessor: João Rodrigo Esclri Quintilino escl R b D figur: R 3 6 lterntiv e. x x v t t 4 x t 4t 8 m/s Se m 4 kg: R m 4 8 R 3 7 R v? v b) omo c R: b R, 9
ULDDES OSWLDO RUZ ESOL SUERIOR DE QUÍMI DIÂMI ) rofessor: João Rodrigo Esclri Quintilino escl R b D figur: R 3 6 lterntiv e. x x v t t 4 x t 4t 8 m/s Se m 4 kg: R m 4 8 R 3 7 R v? v b) omo c R: b R, 9
UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA
 UNVERSDDE DE SÃO PULO ESOL POLTÉN Deprtmento de Engenhri de Estruturs e Geotécnic URSO ÁSO DE RESSTÊN DOS TERS FSÍULO Nº 5 Flexão oblíqu H. ritto.010 1 FLEXÃO OLÍU 1) udro gerl d flexão F LEXÃO FLEXÃO
UNVERSDDE DE SÃO PULO ESOL POLTÉN Deprtmento de Engenhri de Estruturs e Geotécnic URSO ÁSO DE RESSTÊN DOS TERS FSÍULO Nº 5 Flexão oblíqu H. ritto.010 1 FLEXÃO OLÍU 1) udro gerl d flexão F LEXÃO FLEXÃO
Aula 3 - Controle de Velocidade Motor CC
 1 Acionmentos Eletrônicos de Motores Aul 3 - Controle de Velocidde Motor CC Prof. Márcio Kimpr Prof. João Onofre. P. Pinto Universidde Federl de Mto Grosso do Sul/FAENG BATLAB Cmpo Grnde MS Prof. Mrcio
1 Acionmentos Eletrônicos de Motores Aul 3 - Controle de Velocidde Motor CC Prof. Márcio Kimpr Prof. João Onofre. P. Pinto Universidde Federl de Mto Grosso do Sul/FAENG BATLAB Cmpo Grnde MS Prof. Mrcio
A integral definida. f (x)dx P(x) P(b) P(a)
dx P(x) P(b) P(a)") A integrl definid Prof. Méricles Thdeu Moretti MTM/CFM/UFSC. - INTEGRAL DEFINIDA - CÁLCULO DE ÁREA Já vimos como clculr áre de um tipo em específico de região pr lgums funções no intervlo [, t]. O Segundo
A integrl definid Prof. Méricles Thdeu Moretti MTM/CFM/UFSC. - INTEGRAL DEFINIDA - CÁLCULO DE ÁREA Já vimos como clculr áre de um tipo em específico de região pr lgums funções no intervlo [, t]. O Segundo
Laboratórios de Máquinas Eléctricas
 Lbortórios de Máquins Eléctrics L.E.M L.E.A.N. 004/005 TRABALHO Nº3 Máquins de Comutção Mecânic José Miguel Rodrigues, 45063 Ctrin Ferreir, 4644 Dimbi Domnuel, 54651 José Luis, 51659 Índice 1 Introdução,
Lbortórios de Máquins Eléctrics L.E.M L.E.A.N. 004/005 TRABALHO Nº3 Máquins de Comutção Mecânic José Miguel Rodrigues, 45063 Ctrin Ferreir, 4644 Dimbi Domnuel, 54651 José Luis, 51659 Índice 1 Introdução,
Definição Definimos o dominio da função vetorial dada em (1.1) como: dom(f i ) i=1
 como: dom(f i ) i=1") Cpítulo 1 Funções Vetoriis Neste cpítulo estudremos s funções f : R R n, funções que descrevem curvs ou movimentos de objetos no espço. 1.1 Definições e proprieddes Definição 1.1.1 Um função vetoril, é
Cpítulo 1 Funções Vetoriis Neste cpítulo estudremos s funções f : R R n, funções que descrevem curvs ou movimentos de objetos no espço. 1.1 Definições e proprieddes Definição 1.1.1 Um função vetoril, é
Potencial Elétrico. Evandro Bastos dos Santos. 14 de Março de 2017
 Potencil Elétrico Evndro Bstos dos Sntos 14 de Mrço de 2017 1 Energi Potencil Elétric Vmos começr fzendo um nlogi mecânic. Pr um corpo cindo em um cmpo grvitcionl g, prtir de um ltur h i té um ltur h f,
Potencil Elétrico Evndro Bstos dos Sntos 14 de Mrço de 2017 1 Energi Potencil Elétric Vmos começr fzendo um nlogi mecânic. Pr um corpo cindo em um cmpo grvitcionl g, prtir de um ltur h i té um ltur h f,
Conversão de Energia I
 Deprtmento de ngenhri létric Aul 5.3 Gerdores de Corrente Contínu Prof. Clodomiro Unsihuy Vil Bibliogrfi FITZGRALD, A.., KINGSLY Jr. C. UMANS, S. D. Máquins létrics: com Introdução à letrônic De Potênci.
Deprtmento de ngenhri létric Aul 5.3 Gerdores de Corrente Contínu Prof. Clodomiro Unsihuy Vil Bibliogrfi FITZGRALD, A.., KINGSLY Jr. C. UMANS, S. D. Máquins létrics: com Introdução à letrônic De Potênci.
Característica de Regulação do Gerador de Corrente Contínua com Excitação em Derivação
 Experiênci I Crcterístic de egulção do Gerdor de Corrente Contínu com Excitção em Derivção 1. Introdução Neste ensio máquin de corrente contínu ANEL trblhrá como gerdor utoexcitdo, não sendo mis necessári
Experiênci I Crcterístic de egulção do Gerdor de Corrente Contínu com Excitção em Derivção 1. Introdução Neste ensio máquin de corrente contínu ANEL trblhrá como gerdor utoexcitdo, não sendo mis necessári
FUNÇÕES. Funções. TE203 Fundamentos Matemáticos para a Engenharia Elétrica I. TE203 Fundamentos Matemáticos para a Engenharia Elétrica I
 FUNÇÕES DATA //9 //9 4//9 5//9 6//9 9//9 //9 //9 //9 //9 6//9 7//9 8//9 9//9 //9 5//9 6//9 7//9 IBOVESPA (fechmento) 8666 9746 49 48 4755 4 47 4845 45 467 484 9846 9674 97 874 8 88 88 DEFINIÇÃO Um grndez
FUNÇÕES DATA //9 //9 4//9 5//9 6//9 9//9 //9 //9 //9 //9 6//9 7//9 8//9 9//9 //9 5//9 6//9 7//9 IBOVESPA (fechmento) 8666 9746 49 48 4755 4 47 4845 45 467 484 9846 9674 97 874 8 88 88 DEFINIÇÃO Um grndez
2º. Teste de Introdução à Mecânica dos Sólidos Engenharia Mecânica 25/09/ Pontos. 3 m 2 m 4 m Viga Bi Apoiada com Balanço
 2º. Teste de Introdução à Mecânic dos Sólidos Engenhri Mecânic 25/09/2008 25 Pontos 1ª. Questão: eterminr os digrms de esforços solicitntes d Vig i-poid com blnço bixo. 40kN 30 0 150 kn 60 kn/m 3 m 2 m
2º. Teste de Introdução à Mecânic dos Sólidos Engenhri Mecânic 25/09/2008 25 Pontos 1ª. Questão: eterminr os digrms de esforços solicitntes d Vig i-poid com blnço bixo. 40kN 30 0 150 kn 60 kn/m 3 m 2 m
Máquinas de Corrente Contínua
 Máquins de Corrente Contínu Gil Mrques 005 1 Conteúdo Simbologi Clssificção Constituição Princípio de funcionmento Modelo mtemático Crcterístics Mnobr 1 Simbologi: i M G u i f u f Unifilr M Motor G Gerdor
Máquins de Corrente Contínu Gil Mrques 005 1 Conteúdo Simbologi Clssificção Constituição Princípio de funcionmento Modelo mtemático Crcterístics Mnobr 1 Simbologi: i M G u i f u f Unifilr M Motor G Gerdor
Capítulo III INTEGRAIS DE LINHA
 pítulo III INTEGRIS DE LINH pítulo III Integris de Linh pítulo III O conceito de integrl de linh é um generlizção simples e nturl do conceito de integrl definido: f ( x) dx Neste último, integr-se o longo
pítulo III INTEGRIS DE LINH pítulo III Integris de Linh pítulo III O conceito de integrl de linh é um generlizção simples e nturl do conceito de integrl definido: f ( x) dx Neste último, integr-se o longo
Aula 10 Estabilidade
 Aul 0 Estbilidde input S output O sistem é estável se respost à entrd impulso 0 qundo t Ou sej, se síd do sistem stisfz lim y(t) t = 0 qundo entrd r(t) = impulso input S output Equivlentemente, pode ser
Aul 0 Estbilidde input S output O sistem é estável se respost à entrd impulso 0 qundo t Ou sej, se síd do sistem stisfz lim y(t) t = 0 qundo entrd r(t) = impulso input S output Equivlentemente, pode ser
Sub-rede Zero e toda a sub-rede
 Sub-rede Zero e tod sub-rede Índice Introdução Pré-requisitos Requisitos Componentes Utilizdos Convenções Sub-rede zero A sub-rede unificd Problems com sub-rede zero e com sub-rede tudo um Sub-rede zero
Sub-rede Zero e tod sub-rede Índice Introdução Pré-requisitos Requisitos Componentes Utilizdos Convenções Sub-rede zero A sub-rede unificd Problems com sub-rede zero e com sub-rede tudo um Sub-rede zero
CURSO de FÍSICA - Gabarito
 UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA o semestre letivo de 010 e 1 o semestre letivo de 011 CURSO de FÍSICA - Gbrito Verifique se este cderno contém: PROVA DE REDAÇÃO com um propost; INSTRUÇÕES
UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA o semestre letivo de 010 e 1 o semestre letivo de 011 CURSO de FÍSICA - Gbrito Verifique se este cderno contém: PROVA DE REDAÇÃO com um propost; INSTRUÇÕES
Física III Escola Politécnica GABARITO DA P1 2 de abril de 2014
 Físic III - 430301 Escol Politécnic - 014 GABARITO DA P1 de bril de 014 Questão 1 Um brr semi-infinit, mostrd n figur o longo do ldo positivo do eixo horizontl x, possui crg positiv homogenemente distribuíd
Físic III - 430301 Escol Politécnic - 014 GABARITO DA P1 de bril de 014 Questão 1 Um brr semi-infinit, mostrd n figur o longo do ldo positivo do eixo horizontl x, possui crg positiv homogenemente distribuíd
Dinâmica dos Corpos Rígidos
 Sebent de Disciplin DR, Zuzn Dimitrovová, DE/T/UNL, 06 Dinâmic dos orpos Rígidos. Introdução dinâmic, lém d nálise do movimento tmbém nlis origem deste movimento, ou sej, identific s forçs que o provocm,
Sebent de Disciplin DR, Zuzn Dimitrovová, DE/T/UNL, 06 Dinâmic dos orpos Rígidos. Introdução dinâmic, lém d nálise do movimento tmbém nlis origem deste movimento, ou sej, identific s forçs que o provocm,
DECivil Secção de Mecânica Estrutural e Estruturas MECÂNICA I ENUNCIADOS DE PROBLEMAS
 Eivil Secção de Mecânic Estruturl e Estruturs MEÂNI I ENUNIOS E ROLEMS Fevereiro de 2010 ÍTULO 3 ROLEM 3.1 onsidere plc em form de L, que fz prte d fundção em ensoleirmento gerl de um edifício, e que está
Eivil Secção de Mecânic Estruturl e Estruturs MEÂNI I ENUNIOS E ROLEMS Fevereiro de 2010 ÍTULO 3 ROLEM 3.1 onsidere plc em form de L, que fz prte d fundção em ensoleirmento gerl de um edifício, e que está
1 a Lista de Exercícios Carga Elétrica-Lei de Gauss
 1 1 ist de Eercícios Crg Elétric-ei de Guss 1. Um crg de 3, 0µC está fstd 12, 0cm de um crg de 1, 5µC. Clcule o módulo d forç ue tu em cd crg. 2. ul deve ser distânci entre dus crgs pontuis 1 = 26, 0µC
1 1 ist de Eercícios Crg Elétric-ei de Guss 1. Um crg de 3, 0µC está fstd 12, 0cm de um crg de 1, 5µC. Clcule o módulo d forç ue tu em cd crg. 2. ul deve ser distânci entre dus crgs pontuis 1 = 26, 0µC
PEA DEPARTAMENTO DE ENGENHARIA DE ENERGIA E AUTOMAÇÃO ELÉTRICAS PEA-2211: INTRODUÇÃO À ELETROMECÂNICA E À AUTOMAÇÃO
 PEA DEPARTAMENTO DE ENGENHARIA DE ENERGIA E AUTOMAÇÃO ELÉTRICAS PEA-11: INTRODUÇÃO À ELETROMECÂNICA E À AUTOMAÇÃO Máquins de Corrente Contínu Prte II 011 1. Objetivos Anlisr o torque desenvolvido pelos
PEA DEPARTAMENTO DE ENGENHARIA DE ENERGIA E AUTOMAÇÃO ELÉTRICAS PEA-11: INTRODUÇÃO À ELETROMECÂNICA E À AUTOMAÇÃO Máquins de Corrente Contínu Prte II 011 1. Objetivos Anlisr o torque desenvolvido pelos
Curso Básico de Fotogrametria Digital e Sistema LIDAR. Irineu da Silva EESC - USP
 Curso Básico de Fotogrmetri Digitl e Sistem LIDAR Irineu d Silv EESC - USP Bses Fundmentis d Fotogrmetri Divisão d fotogrmetri: A fotogrmetri pode ser dividid em 4 áres: Fotogrmetri Geométric; Fotogrmetri
Curso Básico de Fotogrmetri Digitl e Sistem LIDAR Irineu d Silv EESC - USP Bses Fundmentis d Fotogrmetri Divisão d fotogrmetri: A fotogrmetri pode ser dividid em 4 áres: Fotogrmetri Geométric; Fotogrmetri
GABARITO / 6 TRU 003: Mecânica das Estruturas II T1000 e T2000 3a. Prova 17/11/2006
 GRITO / TRU : ecânic ds struturs II T e T. Prov 7// ( ) ( Pontos). uestão: Sej treiç d figur, compost de brrs de mesm rigidez xi, e sujeit à crg vertic posiciond no nó centr inferior. Use o teorem de peyron
GRITO / TRU : ecânic ds struturs II T e T. Prov 7// ( ) ( Pontos). uestão: Sej treiç d figur, compost de brrs de mesm rigidez xi, e sujeit à crg vertic posiciond no nó centr inferior. Use o teorem de peyron
Roteiro-Relatório da Experiência N o 6 ASSOCIAÇÃO DE QUADRIPOLOS SÉRIE - PARALELO - CASCATA
 UNERSDADE DO ESTADO DE SANTA CATARNA UDESC FACULDADE DE ENGENHARA DE JONLLE FEJ DEPARTAMENTO DE ENGENHARA ELÉTRCA CRCUTOS ELÉTRCOS CEL PROF.: CELSO JOSÉ FARA DE ARAÚJO RoteiroReltório d Experiênci N o
UNERSDADE DO ESTADO DE SANTA CATARNA UDESC FACULDADE DE ENGENHARA DE JONLLE FEJ DEPARTAMENTO DE ENGENHARA ELÉTRCA CRCUTOS ELÉTRCOS CEL PROF.: CELSO JOSÉ FARA DE ARAÚJO RoteiroReltório d Experiênci N o
Manual de Operação e Instalação
 Mnul de Operção e Instlção Clh Prshll MEDIDOR DE VAZÃO EM CANAIS ABERTOS Cód: 073AA-025-122M Rev. B Novembro / 2008 S/A. Ru João Serrno, 250 Birro do Limão São Pulo SP CEP 02551-060 Fone: (11) 3488-8999
Mnul de Operção e Instlção Clh Prshll MEDIDOR DE VAZÃO EM CANAIS ABERTOS Cód: 073AA-025-122M Rev. B Novembro / 2008 S/A. Ru João Serrno, 250 Birro do Limão São Pulo SP CEP 02551-060 Fone: (11) 3488-8999
1 x 5 (d) f = 1 + x 2 2 (f) f = tg 2 x x p 1 + x 2 (g) f = p x + sec 2 x (h) f = x 3p x. (c) f = 2 sen x. sen x p 1 + cos x. p x.
 f = 1 + x 2 2 (f) f = tg 2 x x p 1 + x 2 (g) f = p x + sec 2 x (h) f = x 3p x. (c) f = 2 sen x. sen x p 1 + cos x. p x.") 6. Primitivs cd. 6. Em cd cso determine primitiv F (x) d função f (x), stisfzendo condição especi- () f (x) = 4p x; F () = f (x) = x + =x ; F () = (c) f (x) = (x + ) ; F () = 6. Determine função f que
6. Primitivs cd. 6. Em cd cso determine primitiv F (x) d função f (x), stisfzendo condição especi- () f (x) = 4p x; F () = f (x) = x + =x ; F () = (c) f (x) = (x + ) ; F () = 6. Determine função f que
GRUPO I. Espaço de rascunho: G 2 10
 GRUPO I I.1) Considere o seguinte grfo de estdos de um problem de procur. Os vlores presentdos nos rcos correspondem o custo do operdor (cção) respectivo, enqunto os vlores nos rectângulos correspondem
GRUPO I I.1) Considere o seguinte grfo de estdos de um problem de procur. Os vlores presentdos nos rcos correspondem o custo do operdor (cção) respectivo, enqunto os vlores nos rectângulos correspondem
CÁLCULO I. 1 Volume. Objetivos da Aula. Aula n o 25: Volume por Casca Cilíndrica e Volume por Discos
 CÁLCULO I Prof. Edilson Neri Júnior Prof. André Almeid Aul n o 25: Volume por Csc Cilíndric e Volume por Discos Objetivos d Aul Clculr o volume de sólidos de revolução utilizndo técnic do volume por csc
CÁLCULO I Prof. Edilson Neri Júnior Prof. André Almeid Aul n o 25: Volume por Csc Cilíndric e Volume por Discos Objetivos d Aul Clculr o volume de sólidos de revolução utilizndo técnic do volume por csc
FACULDADE DE ADMINISTRAÇÃO E NEGÓCIOS DE SERGIPE CURSO: ADMINISTRAÇÃO/CIÊNCIAS CONTÁBEI /LOGISTICA ASSUNTO: INTRODUÇÃO AO ESTUDO DE FUNÇÕES
 FACULDADE DE ADMINISTRAÇÃO E NEGÓCIOS DE SERGIPE CURSO: ADMINISTRAÇÃO/CIÊNCIAS CONTÁBEI /LOGISTICA ASSUNTO: INTRODUÇÃO AO ESTUDO DE FUNÇÕES PROFESSOR: MARCOS AGUIAR MAT. BÁSICA I. FUNÇÕES. DEFINIÇÃO Ddos
FACULDADE DE ADMINISTRAÇÃO E NEGÓCIOS DE SERGIPE CURSO: ADMINISTRAÇÃO/CIÊNCIAS CONTÁBEI /LOGISTICA ASSUNTO: INTRODUÇÃO AO ESTUDO DE FUNÇÕES PROFESSOR: MARCOS AGUIAR MAT. BÁSICA I. FUNÇÕES. DEFINIÇÃO Ddos
COLÉGIO MACHADO DE ASSIS. 1. Sejam A = { -1,1,2,3,} e B = {-3,-2,-1,0,1,2,3,4,5}. Para a função f: A-> B, definida por f(x) = 2x-1, determine:
 = 2x-1, determine:") COLÉGIO MACHADO DE ASSIS Disciplin: MATEMÁTICA Professor: TALI RETZLAFF Turm: 9 no A( ) B( ) Dt: / /14 Pupilo: 1. Sejm A = { -1,1,2,3,} e B = {-3,-2,-1,0,1,2,3,4,5}. Pr função f: A-> B, definid por f()
COLÉGIO MACHADO DE ASSIS Disciplin: MATEMÁTICA Professor: TALI RETZLAFF Turm: 9 no A( ) B( ) Dt: / /14 Pupilo: 1. Sejm A = { -1,1,2,3,} e B = {-3,-2,-1,0,1,2,3,4,5}. Pr função f: A-> B, definid por f()
Índice TEMA TEMA TEMA TEMA TEMA
 Índice Resolução de roblems envolvendo triângulos retângulos Teori. Rzões trigonométrics de um ângulo gudo 8 Teori. A clculdor gráfic e s rzões trigonométrics 0 Teori. Resolução de roblems usndo rzões
Índice Resolução de roblems envolvendo triângulos retângulos Teori. Rzões trigonométrics de um ângulo gudo 8 Teori. A clculdor gráfic e s rzões trigonométrics 0 Teori. Resolução de roblems usndo rzões
4. Teorema de Green. F d r = A. dydx. (1) Pelas razões acima referidas, a prova deste teorema para o caso geral está longe
 Pelas razões acima referidas, a prova deste teorema para o caso geral está longe") 4 Teorem de Green Sej U um berto de R 2 e r : [, b] U um cminho seccionlmente, fechdo e simples, isto é, r não se uto-intersect, excepto ns extremiddes Sej região interior r([, b]) prte d dificuldde n
4 Teorem de Green Sej U um berto de R 2 e r : [, b] U um cminho seccionlmente, fechdo e simples, isto é, r não se uto-intersect, excepto ns extremiddes Sej região interior r([, b]) prte d dificuldde n
ESTÁTICA DO SISTEMA DE SÓLIDOS.
 Definições. Forçs Interns. Forçs Externs. ESTÁTIC DO SISTEM DE SÓLIDOS. (Nóbreg, 1980) o sistem de sólidos denomin-se estrutur cuj finlidde é suportr ou trnsferir forçs. São quels em que ção e reção, pertencem
Definições. Forçs Interns. Forçs Externs. ESTÁTIC DO SISTEM DE SÓLIDOS. (Nóbreg, 1980) o sistem de sólidos denomin-se estrutur cuj finlidde é suportr ou trnsferir forçs. São quels em que ção e reção, pertencem
BIOLOGIA E GEOLOGIA 10 Guerner Dias Paula Guimarães Paulo Rocha
 Guerner Dis Pul Guimrães Pulo Roch EXERCÍCIO TIPO EXAME 10.º ANO Nome Turm N.º Dt Robot Curiosity encontr pists de mudnçs n tmosfer de Mrte O robot d NASA com o tmnho de um crro, Curiosity (figur 1), está
Guerner Dis Pul Guimrães Pulo Roch EXERCÍCIO TIPO EXAME 10.º ANO Nome Turm N.º Dt Robot Curiosity encontr pists de mudnçs n tmosfer de Mrte O robot d NASA com o tmnho de um crro, Curiosity (figur 1), está
Resolução A primeira frase pode ser equacionada como: QUESTÃO 3. Resolução QUESTÃO 2 QUESTÃO 4. Resolução
 (9) - www.elitecmpins.com.br O ELITE RESOLVE MATEMÁTICA QUESTÃO Se Améli der R$, Lúci, então mbs ficrão com mesm qunti. Se Mri der um terço do que tem Lúci, então est ficrá com R$, mis do que Améli. Se
(9) - www.elitecmpins.com.br O ELITE RESOLVE MATEMÁTICA QUESTÃO Se Améli der R$, Lúci, então mbs ficrão com mesm qunti. Se Mri der um terço do que tem Lúci, então est ficrá com R$, mis do que Améli. Se
MATRIZES, DETERMINANTES E SISTEMAS LINEARES PROF. JORGE WILSON
 MATRIZES, DETERMINANTES E SISTEMAS LINEARES PROF. JORGE WILSON PROFJWPS@GMAIL.COM MATRIZES Definição e Notção... 11 21 m1 12... 22 m2............ 1n.. 2n. mn Chmmos de Mtriz todo conjunto de vlores, dispostos
MATRIZES, DETERMINANTES E SISTEMAS LINEARES PROF. JORGE WILSON PROFJWPS@GMAIL.COM MATRIZES Definição e Notção... 11 21 m1 12... 22 m2............ 1n.. 2n. mn Chmmos de Mtriz todo conjunto de vlores, dispostos
Resumo. Sinais e Sistemas Transformada Z. Introdução. Transformada Z Bilateral
 Resumo Sinis e Sistems Trnsformd Luís Clds de Oliveir lco@istutlpt Instituto Superior Técnico Definição Região de convergênci Trnsformd invers Proprieddes d trnsformd Avlição geométric d DTFT Crcterição
Resumo Sinis e Sistems Trnsformd Luís Clds de Oliveir lco@istutlpt Instituto Superior Técnico Definição Região de convergênci Trnsformd invers Proprieddes d trnsformd Avlição geométric d DTFT Crcterição
Linguagens Formais e Autômatos (LFA)
") PU-Rio Lingugens Formis e Autômtos (LFA) omplemento d Aul de 21/08/2013 Grmátics, eus Tipos, Algums Proprieddes e Hierrqui de homsky lrisse. de ouz, 2013 1 PU-Rio Dic pr responder Pergunts finis d ul lrisse.
PU-Rio Lingugens Formis e Autômtos (LFA) omplemento d Aul de 21/08/2013 Grmátics, eus Tipos, Algums Proprieddes e Hierrqui de homsky lrisse. de ouz, 2013 1 PU-Rio Dic pr responder Pergunts finis d ul lrisse.
Cinemática de Corpos Rígidos Cinética de Corpos Rígidos Métodos Newton-Euler Exemplos. EESC-USP M. Becker /67
 SEM004 - Aul Cnemátc e Cnétc de Corpos Rígdos Prof. Dr. Mrcelo Becker SEM - EESC - USP Sumáro d Aul ntrodução Cnemátc de Corpos Rígdos Cnétc de Corpos Rígdos Métodos Newton-Euler Eemplos EESC-USP M. Becker
SEM004 - Aul Cnemátc e Cnétc de Corpos Rígdos Prof. Dr. Mrcelo Becker SEM - EESC - USP Sumáro d Aul ntrodução Cnemátc de Corpos Rígdos Cnétc de Corpos Rígdos Métodos Newton-Euler Eemplos EESC-USP M. Becker
Bhaskara e sua turma Cícero Thiago B. Magalh~aes
 1 Equções de Segundo Gru Bhskr e su turm Cícero Thigo B Mglh~es Um equção do segundo gru é um equção do tipo x + bx + c = 0, em que, b e c são números reis ddos, com 0 Dd um equção do segundo gru como
1 Equções de Segundo Gru Bhskr e su turm Cícero Thigo B Mglh~es Um equção do segundo gru é um equção do tipo x + bx + c = 0, em que, b e c são números reis ddos, com 0 Dd um equção do segundo gru como
Progressões Aritméticas
 Segund Etp Progressões Aritmétics Definição São sequêncis numérics onde cd elemento, prtir do segundo, é obtido trvés d som de seu ntecessor com um constnte (rzão).,,,,,, 1 3 4 n 1 n 1 1º termo º termo
Segund Etp Progressões Aritmétics Definição São sequêncis numérics onde cd elemento, prtir do segundo, é obtido trvés d som de seu ntecessor com um constnte (rzão).,,,,,, 1 3 4 n 1 n 1 1º termo º termo
1 a Lista de Exercícios Força Elétrica Campo Elétrico Lei de Gauss
 1 1 ist de Eercícios Forç Elétric Cmpo Elétrico ei de Guss 1. Um crg de 3, 0µC está fstd 12, 0cm de um crg de 1, 5µC. Clcule o módulo d forç ue tu em cd crg. 2. ul deve ser distânci entre dus crgs pontuis
1 1 ist de Eercícios Forç Elétric Cmpo Elétrico ei de Guss 1. Um crg de 3, 0µC está fstd 12, 0cm de um crg de 1, 5µC. Clcule o módulo d forç ue tu em cd crg. 2. ul deve ser distânci entre dus crgs pontuis
A Lei das Malhas na Presença de Campos Magnéticos.
 A Lei ds Mlhs n Presenç de mpos Mgnéticos. ) Revisão d lei de Ohm, de forç eletromotriz e de cpcitores Num condutor ôhmico n presenç de um cmpo elétrico e sem outrs forçs tundo sore os portdores de crg
A Lei ds Mlhs n Presenç de mpos Mgnéticos. ) Revisão d lei de Ohm, de forç eletromotriz e de cpcitores Num condutor ôhmico n presenç de um cmpo elétrico e sem outrs forçs tundo sore os portdores de crg
Universidade Federal do Rio Grande do Sul Escola de Engenharia de Porto Alegre Departamento de Engenharia Elétrica ANÁLISE DE CIRCUITOS II - ENG04031
 Universidde Federl do io Grnde do Sul Escol de Engenhri de Porto Alegre Deprtmento de Engenhri Elétric ANÁLSE DE CCUTOS - ENG04031 Aul 1 - Lineridde, Superposição e elções /A Sumário Dics úteis; Leis e
Universidde Federl do io Grnde do Sul Escol de Engenhri de Porto Alegre Deprtmento de Engenhri Elétric ANÁLSE DE CCUTOS - ENG04031 Aul 1 - Lineridde, Superposição e elções /A Sumário Dics úteis; Leis e
Calculando volumes. Para pensar. Para construir um cubo cuja aresta seja o dobro de a, de quantos cubos de aresta a precisaremos?
 A UA UL LA 58 Clculndo volumes Pr pensr l Considere um cubo de rest : Pr construir um cubo cuj rest sej o dobro de, de quntos cubos de rest precisremos? l Pegue um cix de fósforos e um cix de sptos. Considerndo
A UA UL LA 58 Clculndo volumes Pr pensr l Considere um cubo de rest : Pr construir um cubo cuj rest sej o dobro de, de quntos cubos de rest precisremos? l Pegue um cix de fósforos e um cix de sptos. Considerndo
Aula 3 Controle de Velocidade Motor CC
 AULA Universidde 3 Controle Federl de Mto Velocidde Grosso do Sul Motor CC 1 Acionmento Eletrônico de Motores Aul 3 Controle de Velocidde Motor CC Engenhri Elétric UFMS/FAENG Cmpo Grnde MS Acionmentos
AULA Universidde 3 Controle Federl de Mto Velocidde Grosso do Sul Motor CC 1 Acionmento Eletrônico de Motores Aul 3 Controle de Velocidde Motor CC Engenhri Elétric UFMS/FAENG Cmpo Grnde MS Acionmentos
MÁQUINAS DE CORRENTE CONTÍNUA
 MÁQUINAS DE CORRENTE CONTÍNUA Ivn Cmrgo Revisão 1 (mio de 2007) 1) Introdução A máquin de corrente contínu é compost por um enrolmento de cmpo, gerlmente colocdo no esttor, outro enrolmento no rotor, normlmente
MÁQUINAS DE CORRENTE CONTÍNUA Ivn Cmrgo Revisão 1 (mio de 2007) 1) Introdução A máquin de corrente contínu é compost por um enrolmento de cmpo, gerlmente colocdo no esttor, outro enrolmento no rotor, normlmente
Sensores Indutivos, Capacitivos e Piezoelétricos. Acelerômetros.
 Sensores Indutivos, Capacitivos e Piezoelétricos. Acelerômetros. Outubro de 21 1 Sensores Indutivos 2 Sensores Capacitivos 3 Sensores Piezoelétricos 4 Acelerômetros Sensores Indutivos I Princípio Físico
Sensores Indutivos, Capacitivos e Piezoelétricos. Acelerômetros. Outubro de 21 1 Sensores Indutivos 2 Sensores Capacitivos 3 Sensores Piezoelétricos 4 Acelerômetros Sensores Indutivos I Princípio Físico
Interpretação Geométrica. Área de um figura plana
 Integrl Definid Interpretção Geométric Áre de um figur pln Interpretção Geométric Áre de um figur pln Sej f(x) contínu e não negtiv em um intervlo [,]. Vmos clculr áre d região S. Interpretção Geométric
Integrl Definid Interpretção Geométric Áre de um figur pln Interpretção Geométric Áre de um figur pln Sej f(x) contínu e não negtiv em um intervlo [,]. Vmos clculr áre d região S. Interpretção Geométric
RESOLUÇÃO DA PROVA DE MATEMÁTICA VESTIBULAR DA UNICAMP 2016 FASE 2. POR PROFA. MARIA ANTÔNIA CONCEIÇÃO GOUVEIA
 RESOLUÇÃO DA PROVA DE MATEMÁTICA VESTIBULAR DA UNICAMP 6 FASE. POR PROFA. MARIA ANTÔNIA CONCEIÇÃO GOUVEIA. O gráfico de brrs bixo exibe distribuição d idde de um grupo de pessos. ) Mostre que, nesse grupo,
RESOLUÇÃO DA PROVA DE MATEMÁTICA VESTIBULAR DA UNICAMP 6 FASE. POR PROFA. MARIA ANTÔNIA CONCEIÇÃO GOUVEIA. O gráfico de brrs bixo exibe distribuição d idde de um grupo de pessos. ) Mostre que, nesse grupo,
UNIVERSIDADE CATÓLICA DE GOIÁS
 1 NOTA DE AULA 1 UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplin: FÍSICA GERAL E EXPERIMENTAL I (MAF 1) Coordendor: PROF. EDSON VAZ CAPÍTULOS: 1,, 3 e 4 OBS: Est not de ul
1 NOTA DE AULA 1 UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplin: FÍSICA GERAL E EXPERIMENTAL I (MAF 1) Coordendor: PROF. EDSON VAZ CAPÍTULOS: 1,, 3 e 4 OBS: Est not de ul
Física III Escola Politécnica GABARITO DA PR 28 de julho de 2011
 Físic III - 4320301 Escol Politécnic - 2011 GABARITO DA PR 28 de julho de 2011 Questão 1 () (1,0 ponto) Use lei de Guss pr clculr o vetor cmpo elétrico produzido por um fio retilíneo infinito com densidde
Físic III - 4320301 Escol Politécnic - 2011 GABARITO DA PR 28 de julho de 2011 Questão 1 () (1,0 ponto) Use lei de Guss pr clculr o vetor cmpo elétrico produzido por um fio retilíneo infinito com densidde
Aula 20 Hipérbole. Objetivos
 MÓDULO 1 - AULA 20 Aul 20 Hipérbole Objetivos Descrever hipérbole como um lugr geométrico. Determinr su equção reduzid no sistem de coordends com origem no ponto médio entre os focos e eixo x como o eixo
MÓDULO 1 - AULA 20 Aul 20 Hipérbole Objetivos Descrever hipérbole como um lugr geométrico. Determinr su equção reduzid no sistem de coordends com origem no ponto médio entre os focos e eixo x como o eixo
UNIVERSIDADE CATÓLICA DE GOIÁS. DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplina: FÍSICA GERAL E EXPERIMENTAL I (MAF 2201) Prof.
 Prof.") 1 UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplin: FÍSICA GERAL E EXPERIMENTAL I (MAF 1) Prof. EDSON VAZ NOTA DE AULA I (Cpítulos 1,,3 e 4) CAPÍTULO I MEDIDAS NOTAÇÃO CIENTÍFICA
1 UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplin: FÍSICA GERAL E EXPERIMENTAL I (MAF 1) Prof. EDSON VAZ NOTA DE AULA I (Cpítulos 1,,3 e 4) CAPÍTULO I MEDIDAS NOTAÇÃO CIENTÍFICA
Objetivo. Conhecer a técnica de integração chamada substituição trigonométrica. e pelo eixo Ox. f(x) dx = A.
 dx = A.") MÓDULO - AULA Aul Técnics de Integrção Substituição Trigonométric Objetivo Conhecer técnic de integrção chmd substituição trigonométric. Introdução Você prendeu, no Cálculo I, que integrl de um função
MÓDULO - AULA Aul Técnics de Integrção Substituição Trigonométric Objetivo Conhecer técnic de integrção chmd substituição trigonométric. Introdução Você prendeu, no Cálculo I, que integrl de um função
ESTATÍSTICA APLICADA. 1 Introdução à Estatística. 1.1 Definição
 ESTATÍSTICA APLICADA 1 Introdução à Esttístic 1.1 Definição Esttístic é um áre do conhecimento que trduz ftos prtir de nálise de ddos numéricos. Surgiu d necessidde de mnipulr os ddos coletdos, com o objetivo
ESTATÍSTICA APLICADA 1 Introdução à Esttístic 1.1 Definição Esttístic é um áre do conhecimento que trduz ftos prtir de nálise de ddos numéricos. Surgiu d necessidde de mnipulr os ddos coletdos, com o objetivo
2.4 Integração de funções complexas e espaço
 2.4 Integrção de funções complexs e espço L 1 (µ) Sej µ um medid no espço mensurável (, F). A teori de integrção pr funções complexs é um generlizção imedit d teori de integrção de funções não negtivs.
2.4 Integrção de funções complexs e espço L 1 (µ) Sej µ um medid no espço mensurável (, F). A teori de integrção pr funções complexs é um generlizção imedit d teori de integrção de funções não negtivs.
CAPÍTULO 5 CINEMÁTICA DO MOVIMENTO PLANO DE CORPOS RÍGIDOS
 4 CPÍTULO 5 CINEMÁTIC DO MOVIMENTO PLNO DE CORPOS RÍGIDOS O estudo d dinâmic do copo ígido pode se feito inicilmente tomndo plicções de engenhi onde o moimento é plno. Neste cpítulo mos nlis s equções
4 CPÍTULO 5 CINEMÁTIC DO MOVIMENTO PLNO DE CORPOS RÍGIDOS O estudo d dinâmic do copo ígido pode se feito inicilmente tomndo plicções de engenhi onde o moimento é plno. Neste cpítulo mos nlis s equções
equação paramêtrica/vetorial da curva: a lei γ(t) =... Dizemos que a curva é fechada se I = [a, b] e γ(a) = γ(b).
![equação paramêtrica/vetorial da curva: a lei γ(t) =... Dizemos que a curva é fechada se I = [a, b] e γ(a) = γ(b).](/thumbs/64/50753922.jpg "equação paramêtrica/vetorial da curva: a lei γ(t) =... Dizemos que a curva é fechada se I = [a, b] e γ(a) = γ(b).") 1 Lembrete: curvs Definição Chmmos Curv em R n : um função contínu : I R n onde I R é intervlo. (link desenho curvs) Definimos: Trço d curv: imgem equção prmêtric/vetoril d curv: lei (t) =... Dizemos que
1 Lembrete: curvs Definição Chmmos Curv em R n : um função contínu : I R n onde I R é intervlo. (link desenho curvs) Definimos: Trço d curv: imgem equção prmêtric/vetoril d curv: lei (t) =... Dizemos que
Resumo. Estruturas de Sistemas Discretos. A Explosão do Ariane 5. Objectivo. Representações gráficas das equações às diferenças
 Resumo Estruturs de Sistems Discretos Luís Clds de Oliveir lco@ist.utl.pt Instituto Superior Técnico Representções gráfics ds equções às diferençs Estruturs ásics de sistems IIR Forms trnsposts Estruturs
Resumo Estruturs de Sistems Discretos Luís Clds de Oliveir lco@ist.utl.pt Instituto Superior Técnico Representções gráfics ds equções às diferençs Estruturs ásics de sistems IIR Forms trnsposts Estruturs
Movimento Harmônico Simples M.H.S.
 Moimento Hrmônico Simples M.H.S.. Introdução É o moimento periódico no qul celerção é proporcionl posição. Por eemplo: sistem mss-mol e pêndulo simples.. Cinemátic do M.H.S... Função horári do espço do
Moimento Hrmônico Simples M.H.S.. Introdução É o moimento periódico no qul celerção é proporcionl posição. Por eemplo: sistem mss-mol e pêndulo simples.. Cinemátic do M.H.S... Função horári do espço do
WASTE TO ENERGY: UMA ALTERNATIVA VIÁVEL PARA O BRASIL? 01/10/2015 FIESP São Paulo/SP
 WASTE TO ENERGY: UMA ALTERNATIVA VIÁVEL PARA O BRASIL? 01/10/2015 FIESP São Pulo/SP PNRS E O WASTE-TO-ENERGY Definições do Artigo 3º - A nov ordenção básic dos processos Ordem de prioriddes do Artigo 9º
WASTE TO ENERGY: UMA ALTERNATIVA VIÁVEL PARA O BRASIL? 01/10/2015 FIESP São Pulo/SP PNRS E O WASTE-TO-ENERGY Definições do Artigo 3º - A nov ordenção básic dos processos Ordem de prioriddes do Artigo 9º
SOCIEDADE EDUCACIONAL DE SANTA CATARINA INSTITUTO SUPERIOR TUPY
 SOCIEDADE EDUCACIONAL DE SANTA CATARINA INSTITUTO SUPERIOR TUPY IDENTIFICAÇÃO Curso: Engenhri Químic PLANO DE ENSINO Período/Módulo: 6 o Período Disciplin/Unidde Curriculr: Cálculo Numérico Código: CE259
SOCIEDADE EDUCACIONAL DE SANTA CATARINA INSTITUTO SUPERIOR TUPY IDENTIFICAÇÃO Curso: Engenhri Químic PLANO DE ENSINO Período/Módulo: 6 o Período Disciplin/Unidde Curriculr: Cálculo Numérico Código: CE259
Considerando a necessidade de contínua atualização do Programa de Controle da Poluição do Ar por Veículos Automotores - PROCONVE;
 http://www.mm.gov.br/port/conm/res/res97/res22697.html Pge 1 of 5 Resoluções RESOLUÇÃO Nº 226, DE 20 DE AGOSTO DE 1997 O Conselho Ncionl do Meio Ambiente - CONAMA, no uso ds tribuições que lhe são conferids
http://www.mm.gov.br/port/conm/res/res97/res22697.html Pge 1 of 5 Resoluções RESOLUÇÃO Nº 226, DE 20 DE AGOSTO DE 1997 O Conselho Ncionl do Meio Ambiente - CONAMA, no uso ds tribuições que lhe são conferids
Simbolicamente, para. e 1. a tem-se
 . Logritmos Inicilmente vmos trtr dos ritmos, um ferrment crid pr uilir no desenvolvimento de cálculos e que o longo do tempo mostrou-se um modelo dequdo pr vários fenômenos ns ciêncis em gerl. Os ritmos
. Logritmos Inicilmente vmos trtr dos ritmos, um ferrment crid pr uilir no desenvolvimento de cálculos e que o longo do tempo mostrou-se um modelo dequdo pr vários fenômenos ns ciêncis em gerl. Os ritmos
Teorema de Green no Plano
 Instituto Superior Técnico eprtmento de Mtemátic Secção de Álgebr e Análise Prof. Gbriel Pires Teorem de Green no Plno O teorem de Green permite relcionr o integrl de linh o longo de um curv fechd com
Instituto Superior Técnico eprtmento de Mtemátic Secção de Álgebr e Análise Prof. Gbriel Pires Teorem de Green no Plno O teorem de Green permite relcionr o integrl de linh o longo de um curv fechd com
Lista de Problemas H2-2002/2. LISTA DE PROBLEMAS Leia atentamente as instruções relativas aos métodos a serem empregados para solucionar os problemas.
 List de Prolems H 0/ List sugerid de prolems do livro texto (Nilsson& Riedel, quint edição) 4.8, 4.9, 4., 4.1, 4.18, 4., 4.1, 4., 4.3, 4.3, 4.36, 4.38, 4.39, 4.40, 4.41, 4.4, 4.43, 4.44, 4.4, 4.6, 4.,
List de Prolems H 0/ List sugerid de prolems do livro texto (Nilsson& Riedel, quint edição) 4.8, 4.9, 4., 4.1, 4.18, 4., 4.1, 4., 4.3, 4.3, 4.36, 4.38, 4.39, 4.40, 4.41, 4.4, 4.43, 4.44, 4.4, 4.6, 4.,
1. VARIÁVEL ALEATÓRIA 2. DISTRIBUIÇÃO DE PROBABILIDADE
 Vriáveis Aletóris 1. VARIÁVEL ALEATÓRIA Suponhmos um espço mostrl S e que cd ponto mostrl sej triuído um número. Fic, então, definid um função chmd vriável letóri 1, com vlores x i2. Assim, se o espço
Vriáveis Aletóris 1. VARIÁVEL ALEATÓRIA Suponhmos um espço mostrl S e que cd ponto mostrl sej triuído um número. Fic, então, definid um função chmd vriável letóri 1, com vlores x i2. Assim, se o espço
CONHECIMENTOS ESPECÍFICOS» CONTROLE E PROCESSOS INDUSTRIAIS (PERFIL 7) «
 «") IFPB» Concurso Público Professor Efetivo de Ensino Básico, Técnico e Tecnológico» Editl Nº 136/2011 CONHECIMENTOS ESPECÍFICOS» CONTROLE E PROCESSOS INDUSTRIAIS (PERFIL 7) «21. Um dos principis equipmentos
IFPB» Concurso Público Professor Efetivo de Ensino Básico, Técnico e Tecnológico» Editl Nº 136/2011 CONHECIMENTOS ESPECÍFICOS» CONTROLE E PROCESSOS INDUSTRIAIS (PERFIL 7) «21. Um dos principis equipmentos
Leitura de Temperatura e Umidade pelo Logo
 Leitur de Tempertur e Umidde pelo Logo N edição nº 4 (setembro/outubro 5) publicmos um rtigo referente um circuito pr leitur de tempertur pel port prlel de um PC pelo Logo. Este novo rtigo, lém de possibilitr
Leitur de Tempertur e Umidde pelo Logo N edição nº 4 (setembro/outubro 5) publicmos um rtigo referente um circuito pr leitur de tempertur pel port prlel de um PC pelo Logo. Este novo rtigo, lém de possibilitr
Diagrama de Blocos. Estruturas de Sistemas Discretos. Grafo de Fluxo. Sistemas IIR Forma Directa I
 Estruturs de Sistems Discretos Luís Clds de Oliveir Digrm de Blocos As equções às diferençs podem ser representds num digrm de locos com símolos pr:. Representções gráfics ds equções às diferençs som de
Estruturs de Sistems Discretos Luís Clds de Oliveir Digrm de Blocos As equções às diferençs podem ser representds num digrm de locos com símolos pr:. Representções gráfics ds equções às diferençs som de
Professores Edu Vicente e Marcos José Colégio Pedro II Departamento de Matemática Potências e Radicais
 POTÊNCIAS A potênci de epoente n ( n nturl mior que ) do número, representd por n, é o produto de n ftores iguis. n =...... ( n ftores) é chmdo de bse n é chmdo de epoente Eemplos =... = 8 =... = PROPRIEDADES
POTÊNCIAS A potênci de epoente n ( n nturl mior que ) do número, representd por n, é o produto de n ftores iguis. n =...... ( n ftores) é chmdo de bse n é chmdo de epoente Eemplos =... = 8 =... = PROPRIEDADES
Um disco rígido de 300Gb foi dividido em quatro partições. O conselho directivo ficou. 24, os alunos ficaram com 3 8
 GUIÃO REVISÕES Simplificção de expressões Um disco rígido de 00Gb foi dividido em qutro prtições. O conselho directivo ficou com 1 4, os docentes ficrm com 1 4, os lunos ficrm com 8 e o restnte ficou pr
GUIÃO REVISÕES Simplificção de expressões Um disco rígido de 00Gb foi dividido em qutro prtições. O conselho directivo ficou com 1 4, os docentes ficrm com 1 4, os lunos ficrm com 8 e o restnte ficou pr
XX SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GRUPO DE ESTUDO DE ANÁLISE E TÉCNICAS DE SISTEMAS DE POTÊNCIA CA E CC - GAT
 XX SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GAT. 5 Novemro de 9 Recife - PE GRUPO IV GRUPO DE ESTUDO DE ANÁLISE E TÉCNICAS DE SISTEMAS DE POTÊNCIA CA E CC - GAT PROJETO E
XX SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GAT. 5 Novemro de 9 Recife - PE GRUPO IV GRUPO DE ESTUDO DE ANÁLISE E TÉCNICAS DE SISTEMAS DE POTÊNCIA CA E CC - GAT PROJETO E
Colegio Naval ) O algoritmo acima foi utilizado para o cálculo do máximo divisor comum entre os números A e B. Logo A + B + C vale
 O algoritmo acima foi utilizado para o cálculo do máximo divisor comum entre os números A e B. Logo A + B + C vale") Colegio Nvl 005 01) O lgoritmo cim foi utilizdo pr o cálculo do máximo divisor comum entre os números A e B. Logo A + B + C vle (A) 400 (B) 300 (C) 00 (D) 180 (E) 160 Resolvendo: Temos que E 40 C E C 40
Colegio Nvl 005 01) O lgoritmo cim foi utilizdo pr o cálculo do máximo divisor comum entre os números A e B. Logo A + B + C vle (A) 400 (B) 300 (C) 00 (D) 180 (E) 160 Resolvendo: Temos que E 40 C E C 40
Rolamentos com uma fileira de esferas de contato oblíquo
 Rolmentos com um fileir de esfers de contto oblíquo Rolmentos com um fileir de esfers de contto oblíquo 232 Definições e ptidões 232 Séries 233 Vrintes 233 Tolerâncis e jogos 234 Elementos de cálculo 236
Rolmentos com um fileir de esfers de contto oblíquo Rolmentos com um fileir de esfers de contto oblíquo 232 Definições e ptidões 232 Séries 233 Vrintes 233 Tolerâncis e jogos 234 Elementos de cálculo 236
Resumo. Sinais e Sistemas Transformada Z. Introdução. Transformada Z Bilateral
 Resumo Sinis e Sistems Trnsformd lco@ist.utl.pt Instituto Superior Técnico Definição Região de convergênci Trnsformd invers Proprieddes d trnsformd Avlição geométric d DTFT Crcterição de SLITs usndo trnsformd.
Resumo Sinis e Sistems Trnsformd lco@ist.utl.pt Instituto Superior Técnico Definição Região de convergênci Trnsformd invers Proprieddes d trnsformd Avlição geométric d DTFT Crcterição de SLITs usndo trnsformd.
FENÔMENOS DE TRANSPORTE MECÂNICA DOS FLUIDOS
 Universidde ederl Rurl do Semi-Árido ENÔMENOS DE TRANSPORTE MECÂNICA DOS LUIDOS ESTÁTICA DOS LUIDOS UERSA Universidde ederl Rurl do Semi-Árido Prof. Roberto Vieir Pordeus Nots de ul enômenos de Trnsorte
Universidde ederl Rurl do Semi-Árido ENÔMENOS DE TRANSPORTE MECÂNICA DOS LUIDOS ESTÁTICA DOS LUIDOS UERSA Universidde ederl Rurl do Semi-Árido Prof. Roberto Vieir Pordeus Nots de ul enômenos de Trnsorte
Introdução (1/2) Rotor. Fonte elétrica 1. Fonte elétrica. T arm. Estator
 Rotor. Fonte elétrica 1. Fonte elétrica. T arm. Estator") Máquins Síncrons Motivções pr o estudo de máquins síncrons. Introdução. Tensão induzid. Gerdor e Motor síncrono. Circuito equivlente. Comentários geris. Curiosidde. Motivções Por que precismos estudr este
Máquins Síncrons Motivções pr o estudo de máquins síncrons. Introdução. Tensão induzid. Gerdor e Motor síncrono. Circuito equivlente. Comentários geris. Curiosidde. Motivções Por que precismos estudr este