Método de Nyquist. definições propriedades (Teorema de Cauchy) estabilidade Relativa. Margem de Ganho Margem de Fase
|
|
|
- Malu Barata Dreer
- 5 Há anos
- Visualizações:
Transcrição
1 Método de Nyquist M O T I V A Ç Ã O F U N Ç Õ E S C O M P L E X A S definições propriedades (Teorema de Cauchy) C A M I N H O D E N Y Q U I S T D I A G R A M A S D E N Y Q U I S T C R I T É R I O D E E S T A B I L I D A D E D E N Y Q U I S T estabilidade Relativa Margem de Ganho Margem de Fase S I S T E M A S M U L T I V A R I Á V E I S 1
) plano dos polos e zeros!")
2 Motivação 2 Determinação e medida da estabilidade absoluta e relativa, que outros métodos não conseguem fazer. Aplicável a funções de transferências transcendentais ou determinadas experimentalmente. Obs.: plano-s (P(s)) plano dos polos e zeros!!! P(s) (plano-s) p1 p1*
3 Funções Complexas A variável independente (frequência) s de Laplace é dada por: s = σ+ωj 3 So ωj P(s) (plano-s) σo ωo σ


 ωj ωo G(So) σ")
 (plano complexo)")
4 Funções Complexas 4 Como s= σ + ωj, para representar G(s) são necessários dois planos: So P(s) (plano-s) ωj ωo G(So) σ Transformação Im(G) ψ(s) (plano complexo) σo Domínio Re(G) Contra-domínio
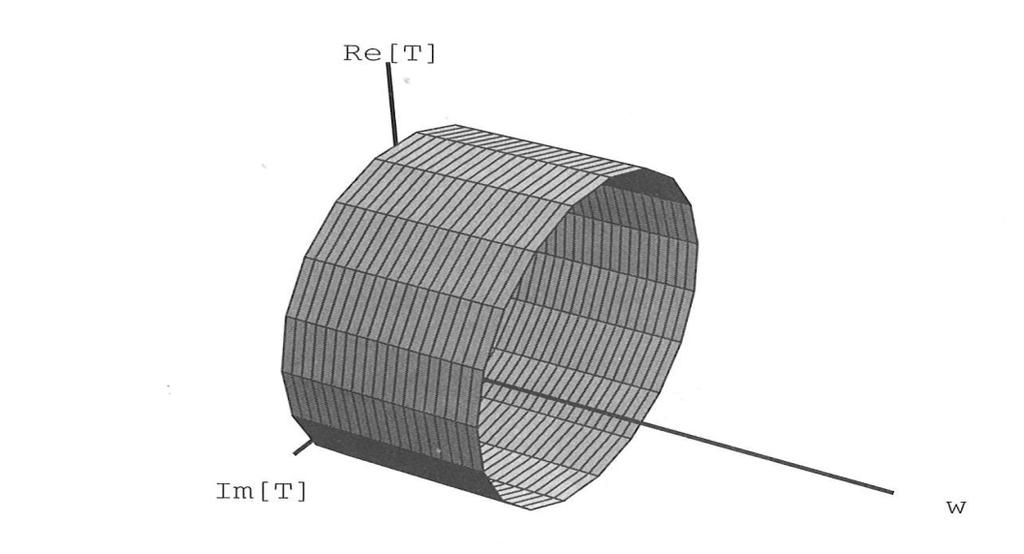
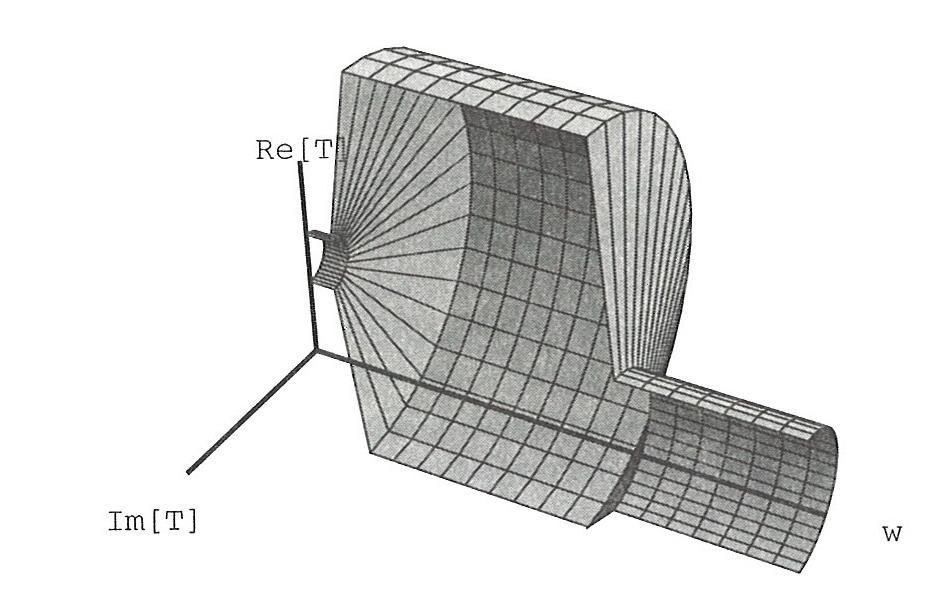
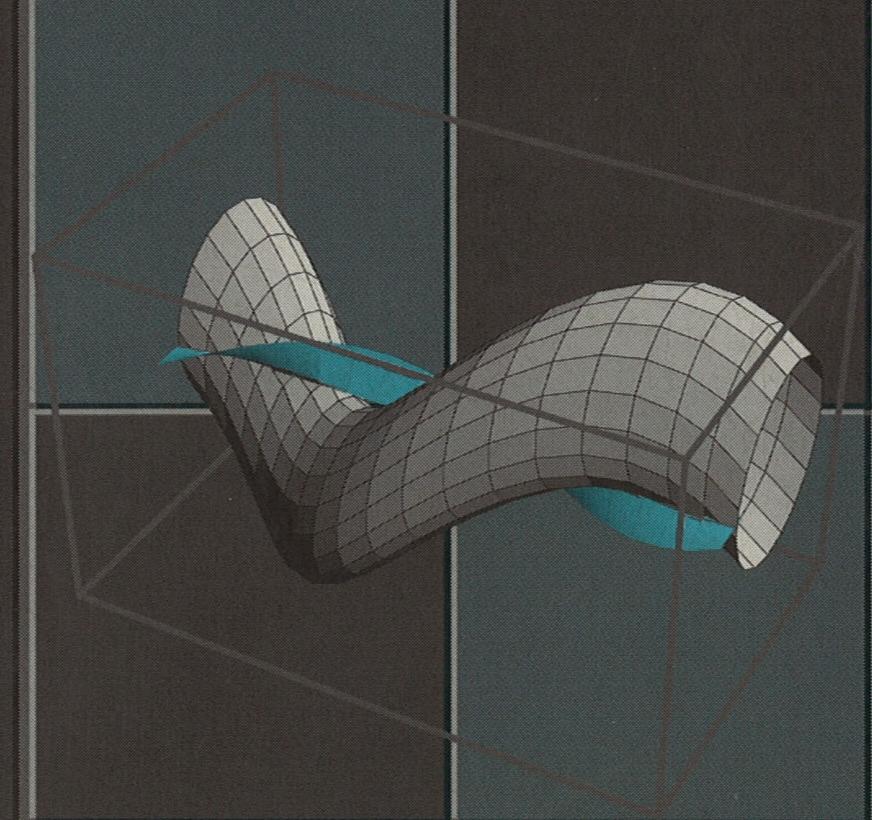
5 Funções Complexas: ex. 3D 5
6 Definições a) A derivada de G(s) no ponto so é dada por: dg ds sso lim sso 6 G( s) s G( so). so b) Se a derivada existe no interior de uma região do plano complexo, onde os extremos são finitos e definidos, G(s) é dita analítica nesta região. c) Pontos de G(s) que não são analíticos, são chamados pontos singulares ou singularidades de G(s). Todo polo de G(s) é uma singularidade.
7 Definições d) Um curva fechada no plano complexo é uma curva contínua que começa e termina num mesmo ponto Im(G) 7 Re(G)

.")
8 Definições e) Todos os pontos que ficam à direita de uma curva quando se anda no sentido pré-estabelecido são ditos contornados pela curva (pontos em amarelo). Im(G) 8 Re(G)
9 Definições 9 Im(G) Origem contornada Re(G)
10 Definições 10 Im(G) Origem fora da região contornada. Re(G)
11 Definições 11 f) O sentido horário (SH) será considerado o sentido positivo Im(G) Origem contornada uma vez, positivamente Re(G)
 12 Uma volta positiva ao redor da origem.")
12 Definições g) Uma curva fechada dá n vezes na origem positivamente quando a reta que liga a origem a um ponto da curva percorrer nx360 no sentindo horário. Im(G) 12 Uma volta positiva ao redor da origem. θ Re(G)

13 Definições 13 Im(G) Volta negativa ao redor da Origem. θ Re(G)
 θ")
14 Definições Voltas líquidas: No= nxsh-mxsah 14 No=+1 Im(G) θ Re(G)
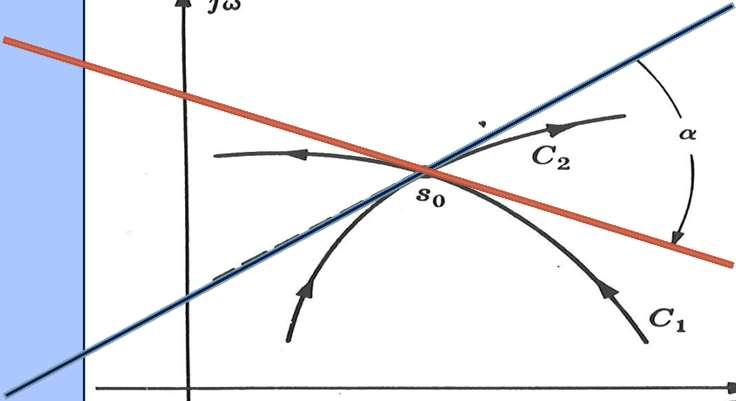
15 Propriedades da Transformada G(s) Para G(s) analítica, a transformação é: Unívoca Contornos no plano-s (P(s)) excluem singularidades A transformada é conforme: ângulos e orientação relativas no plano-s são preservadas no plano complexo do contra-domínio (ψ(s)). Transformada conforme trajetória fechada no plano-s trajetória fechada no plano ψ(s). 15

16 Transformada conforme P(s) 16 ψ(s)
17 Teorema de Cauchy Também conhecido como Princípio do Argumento 17 O número de voltas (No) num contorno fechado ao redor da origem do plano ψ(s) é igual ao número de zeros (Zo) menos o número de polos (Po) de G(s) que são contornados por uma curva fechada no plano-s: No= Zo-Po.
 (plano-s) σ")
18 Ilustração: Teorema de Cauchy ωj 18 P(s) (plano-s) σ Domínio
 ψ(s) No= +1 Re(G)")
19 Teorema de Cauchy Ilustração: SH 19 Im(G) ψ(s) No= +1 Re(G) Contra-domínio
20 Teorema de Cauchy (cont.) 20 Se a origem é contornada no sentido horário pela curva no plano ψ(s), então No>0, caso contrário No 0, isto é, a origem não é contornada ou é contornada negativamente (SAH). No= -1 Im(G) SAH ψ(s) Re(G)
21 Critério de Estabilidade de Nyquist R(s) E(s) 21 G Y(s) H T FTMA : GH(s) G FTMF : T ( s) 1 GH Φ(s) 1 GH(s) 0 obs : Polos de MF zeros de Φ(s)
22 Critério de Estabilidade de Nyquist Para estabilidade em MF sabemos que os polos de MF, portanto os zeros de Φ(s), devem estar todos no semi-plano esquerdo do plano-s (P(s)), isto é, devem ter todos parte real negativa. Nyquist propôs um critério de estabilidade baseado no teorema do argumento de Cauchy e nos planos P(s) e ψ(s). Ele criou uma curva fechada englobando todo o semi-plano direito de P(s) e usando a equação característica Φ(s) para criar a imagem em ψ(s) pôde associar os zeros e polos contornados em P(s) com os contornos da origem em ψ(s). A curva fechada em P(s) é conhecida como o Caminho de Nyquist. 22
23 Caminho de Nyquist 23
24 Caminho de Nyquist 24
25 Caminho de Nyquist 25 O Caminho de Nyquist é a curva fechada C no planos, que contorna todos os pontos no semi-plano direito. Se G(s) tem polos no eixo imaginário ou na origem, a curva C contorna estes pontos com pequenas circunferências de raio ρ 0. O raio R de C tende para infinito: R, de modo que a curva engloba todo o semi-plano direito do plano-s. Evidentemente, a curva C contornará todos os polos e zeros de G(s) que estiverem no semiplano direito.
26 Critério de Estabilidade de Nyquist 26 Im(Φ) Φ(s) O Re(Φ) Pelo Teorema de Cauchy (argumento) : N o Z D-P Caminho de Nyquist Diagrama de Nyquist D
27 Critério de Estabilidade de Nyquist Cauchy : N (Obs. : Z zeros de (s) polos de MF) D Nyquist : para estabilidade Z 0 N isto é, para estabilidade, o número de voltas ao redor da origem no sentido anti - horário (SAH) do plano -Ψ(s) deve ser igual ao número de polos instáveis da equação característica (s). Obs : O sistema do slide anterior seria instável em MF (voltas o o Z P D D P D positivas D ao redor da origem)! 27
28 Critério de Estabilidade de Nyquist N ( s) D 1) Φ(s) 1 GH(s) 1 K D( s) KN 0 D polos de GH(s) polos de Φ(s) D(s) (polos de MA polos da equação característica). 0 2) Φ(s) 1 GH(s) 0 GH(s) 1. Ao invés de olharmos as voltas de Φ(s) ao redor da origem do plano -Ψ(s) podemos olhar as voltas de GH(s) ao redor do ponto -1do plano -Ψ(s). 28
29 Critério de Estabilidade de Nyquist 29 Considerando: GH(s)=-1 Um sistema de controle em malha fechada é estável se e somente se: N1 -PGH isto é, o número de voltas ao redor do ponto -1 no plano complexo ψ(s) seja nulo ou negativo (sentido anti-horário) e igual ao número de polos instáveis da função de transferência de malha aberta (GH(s))
30 Critério de Estabilidade de Nyquist 30 Im(GH) GH(s) -1 O Re(GH) Caminho de Nyquist Pelo Critério de Nyquist : sistema em Malha Fechada instável (-1contornado positivamente) Diagrama de Nyquist
31 Critério de Estabilidade de Nyquist 31 Se N1>0 (ponto -1 contornado positivamente) SISTEMA INSTÁVEL. Se a FTMA (GH(s)) for instável, isto é, possuir PGH polos instáveis no semiplano direito de P(s) e limgh ( s) cte (sistema físico), então, para s estabilidade em Malha Fechada, o diagrama de Nyquist deve contornar o ponto -1 no plano ψ(s) PGH vezes no sentido anti-horário. Se N1 0 e PGH=0 (FTMA estável) o sistema em MF é estável se e somente se N1=0 (isto é, -1 não é contornado em ψ(s).
 Im(GH) -1-1 O Re(GH) -1 O")
32 Critério de Estabilidade de Nyquist Quando N1 0, o ponto -1 não é contornado positivamente 32 Im(GH) Im(GH) -1-1 O Re(GH) -1 O Re(GH)
33 Diagramas polares e Diagramas de Nyquist 33 G(s) com s= σ + ωj. No caso especial em que σ = 0, G(ωj) é a função de transferência senoidal. O plano-s torna-se a reta do eixo imaginário. G(ωj) pode ser descrita no contradomínio em função de um único parâmetro, a frequência ω. Com o auxílio da reta ωj do plano-s, constroem-se os diagramas polares no plano ψ(s). Usando s= σ + ωj constroem-se os diagramas de Nyquist, que são todos curvas fechadas em ψ(s). Os softwares como Matlab ou Scilab constroem apenas os diagramas polares. Quando eles forem abertos deverão ser fechados manualmente, através de métodos analíticos ou gráficos.
 Φ Im(G) e jφ ψ(s) ωo G( j) Re(G)")
34 Diagramas polares G( j) G( j) G( jw) G( j) Φ Im(G) e jφ ψ(s) ωo G( j) Re(G) 34

35 35 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( jw G jw G jw G e e jw G jw G jw G j G jw G jw G j G jφ Φ j jφ Diagramas polares G1G2 Φ Φ1 G1 Φ2 G2
36 Diagramas polares e Nyquist 36 A serem desenvolvidos em aula: Sistemas do tipo zero: 1ª e 2ª Ordem e ordem superior. Diagramas polares fechados Sistemas do tipo um: Diagrama polar aberto, uma semicircunferência de raio infinito. Sistemas do tipo dois: Diagrama polar aberto, duas semicircunferências de raio infinito. Sistemas do tipo q: Diagrama polar aberto, q semicircunferências de raio infinito.
37 Diagramas polares e Nyquist 37 A serem desenvolvidos em aula: Sistemas do tipo zero: 1ª e 2ª Ordem e ordem superior. Diagramas polares fechados Sistemas do tipo um: Diagrama polar aberto, uma semicircunferência de raio infinito. Sistemas do tipo dois: Diagrama polar aberto, duas semicircunferências de raio infinito. Sistemas do tipo q: Diagrama polar aberto, q semicircunferências de raio infinito.


38 1 s 0 1 GH ( s) GH s( s 1) s2 1 Para estabilidade : N 0 Neste caso, N sistema estável em MF! 1 1 Exemplos marginalmente estável 0 (-1 não é contornado positivamente) -1 Ψ(s) 38
39 Estabilidade Nominal - MIMO D r e B x x C y y A 39
40 40 Estabilidade Nominal - MIMO 0.:. ) ( com ], [ (4) ) (, (3) malha com : Fechando a 0.:. ) ( ) ( ) ( (2) (1) ) (, 1 1 ) ( F F F F F F A caract Eq s o caract Eq s s s o s FTMA A si A si Φ I D C D) B(I A A x x r B x A x y r e A si A si Φ D E B A) C(sI Y De Cx y x x Be Ax x 1 o 1 o L
41 41 Estabilidade Nominal - MIMO I L I L A I A I I L A I A I I L I A L I A I 0 D F F F F zeros de polos de MF descreve as características de Malha Fechada. 0 de MF de 0 não houver cancelamento de raízes : 0 0 por facilidade : polos s zeros s se s s s s
42 Estabilidade Nominal - MIMO 42 Seja: L(jw) = GK(jw) com P R polos instáveis: N = - P R (P R voltas no SAH ao redor de -1). O sistema em MF com matriz de transferência de malha aberta L(s) com P R polos instáveis é estável se e somente se o diagrama de Nyquist do det(l(jw)) não passa pelo ponto -1 e o contorna P R no SAH, quando s percorre o Caminho de Nyquist
ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA
 VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
O critério de Nyquist
 O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
Margem de Ganho e Margem de Fase Diagrama de Nichols
 Departamento de Engenharia Química e de Petróleo UFF Margem de Ganho e Margem de Fase Diagrama de Nichols Outros Processos de Separação Critério de Estabilidade de Desenvolvido por Harry (1932) nos laboratórios
Departamento de Engenharia Química e de Petróleo UFF Margem de Ganho e Margem de Fase Diagrama de Nichols Outros Processos de Separação Critério de Estabilidade de Desenvolvido por Harry (1932) nos laboratórios
IV. ESTABILIDADE DE SISTEMAS LIT
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist
 Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Controle e servomecanismo TE240 Análise no domínio da frequência. Juliana L. M. Iamamura
 Controle e servomecanismo TE240 Análise no domínio da frequência Juliana L. M. Iamamura Análise no domínio da frequência Projetos simples Não é necessário conhecer polos e zeros Sinais decompostos em somas
Controle e servomecanismo TE240 Análise no domínio da frequência Juliana L. M. Iamamura Análise no domínio da frequência Projetos simples Não é necessário conhecer polos e zeros Sinais decompostos em somas
Controle de Processos Aula: Estabilidade e Critério de Routh
 107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência 1. Motivação 2. Mapas de contorno no Plano-s 3. Critério de Nyquist pag.1 Controle de Sistemas Lineares Aula 16 Estabilidade no Domínio da Freqüência Como analisar
Estabilidade no Domínio da Freqüência 1. Motivação 2. Mapas de contorno no Plano-s 3. Critério de Nyquist pag.1 Controle de Sistemas Lineares Aula 16 Estabilidade no Domínio da Freqüência Como analisar
Aula 9. Carlos Amaral Cristiano Quevedo Andrea. UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica
 Aula 9 Carlos Amaral Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Abril de 2012. Resumo 1 Introdução - Estabilidade
Aula 9 Carlos Amaral Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Abril de 2012. Resumo 1 Introdução - Estabilidade
PROJETO DE CONTROLADORES A PARTIR DO PLANO S. critério Routh-Hurwitz análise de estabilidade análise de desempenho
 PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
Princípios de Controle Robusto
 Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Capítulo 10. Técnicas de Resposta de Freqüência
 Capítulo 10 Técnicas de Resposta de Freqüência Fig.10.1 O Analisador Dinâmico de Sinal HP 35670A obtém dados de resposta de freqüência de um sistema físico. Os dados exibidos podem ser usados para analisar,
Capítulo 10 Técnicas de Resposta de Freqüência Fig.10.1 O Analisador Dinâmico de Sinal HP 35670A obtém dados de resposta de freqüência de um sistema físico. Os dados exibidos podem ser usados para analisar,
Critério de Estabilidade: Routh-Hurwitz
 Critério de Estabilidade: Routh-Hurwitz O Critério de Nyquist foi apresentado anteriormente para determinar a estabilidade de um sistema em malha fechada analisando-se sua função de transferência em malha
Critério de Estabilidade: Routh-Hurwitz O Critério de Nyquist foi apresentado anteriormente para determinar a estabilidade de um sistema em malha fechada analisando-se sua função de transferência em malha
23/04/2018. Estabilidade de Circuitos com AMPOP
 Estabilidade de Circuitos com AMPOP 1 Estabilidade de Circuitos com AMPOP Função de transferência em malha fechada Hipóteses: ganho CC constante pólos e zeros em altas freqüências (s) constante em baixas
Estabilidade de Circuitos com AMPOP 1 Estabilidade de Circuitos com AMPOP Função de transferência em malha fechada Hipóteses: ganho CC constante pólos e zeros em altas freqüências (s) constante em baixas
Controle 2 - Introdução
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 28 de outubro de 2013 Permanência 5 as e 6 as pela manhã Agendar com antecedência moritz@utfpr.edu.br http://paginapessoal.utfpr.edu.br/moritz
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 28 de outubro de 2013 Permanência 5 as e 6 as pela manhã Agendar com antecedência moritz@utfpr.edu.br http://paginapessoal.utfpr.edu.br/moritz
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
 Estabilidade Estabilidade é um comportamento desejado em qualquer sistema físico. Sistemas instáveis tem comportamento, na maioria das vezes, imprevisível; por isso é desejável sempre garantirmos a estabilidade
Estabilidade Estabilidade é um comportamento desejado em qualquer sistema físico. Sistemas instáveis tem comportamento, na maioria das vezes, imprevisível; por isso é desejável sempre garantirmos a estabilidade
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica. Sistemas de Controle Realimentados
 Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da
Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da
Pólos, Zeros e Estabilidade
 Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES A função de transferência do circuito abaixo em malha fechada é: F(s) = C(s) = G(s)
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES A função de transferência do circuito abaixo em malha fechada é: F(s) = C(s) = G(s)
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica. Sistemas de Controle Realimentados
 Critério de Estabilidade de Nyquist Introdução Princípio do Argumento Contorno de Nyquist Exemplos Problemas Propostos 1 Critério de Estabilidade de Nyquist { Estabilidade absoluta Estudo de Estabilidade
Critério de Estabilidade de Nyquist Introdução Princípio do Argumento Contorno de Nyquist Exemplos Problemas Propostos 1 Critério de Estabilidade de Nyquist { Estabilidade absoluta Estudo de Estabilidade
O lugar das raízes p. 1/54. O lugar das raízes. Newton Maruyama
 O lugar das raízes p. 1/54 O lugar das raízes Newton Maruyama O lugar das raízes p. 2/54 Introdução Neste capítulo é apresentado o método do lugar das raízes, que consiste basicamente em levantar a localização
O lugar das raízes p. 1/54 O lugar das raízes Newton Maruyama O lugar das raízes p. 2/54 Introdução Neste capítulo é apresentado o método do lugar das raízes, que consiste basicamente em levantar a localização
Análise da Resposta em Frequência
 Análise da Resposta em Frequência Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 6 de dezembro de 2016 Sumário 1 Introdução 2 Resposta
Análise da Resposta em Frequência Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 6 de dezembro de 2016 Sumário 1 Introdução 2 Resposta
Nyquist, Função de Sensibilidade e Desempenho Nominal
 Nyquist, Função de Sensibilidade e Desempenho Nominal 1. Revisitando o critério de estabilidade de Nyquist 1.1. Margens de ganho e de fase 2. Erro de rastreamento e função de sensibilidade 2.1. Vetor de
Nyquist, Função de Sensibilidade e Desempenho Nominal 1. Revisitando o critério de estabilidade de Nyquist 1.1. Margens de ganho e de fase 2. Erro de rastreamento e função de sensibilidade 2.1. Vetor de
Aula 6 - Desempenho e Estabilidade MIMO, Ganho Pequeno
 Aula 6 - Desempenho e Estabilidade MIMO, Teorema do Ganho Pequeno Universidade de São Paulo Sistemas Multivariáveis Espaço de Estados ẋ =Ax + Bu y =Cx + Du Exemplo [ 1 4 A = 2 3 [ 1 2 C = 0 1 ] [ 1 0,
Aula 6 - Desempenho e Estabilidade MIMO, Teorema do Ganho Pequeno Universidade de São Paulo Sistemas Multivariáveis Espaço de Estados ẋ =Ax + Bu y =Cx + Du Exemplo [ 1 4 A = 2 3 [ 1 2 C = 0 1 ] [ 1 0,
Introdução Diagramas de Bode Gráficos Polares Gráfico de Amplitude em db Versus Fase. Aula 14. Cristiano Quevedo Andrea 1
 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro 2012. 1 / 48 Resumo 1 Introdução 2 Diagramas de Bode 3
Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro 2012. 1 / 48 Resumo 1 Introdução 2 Diagramas de Bode 3
Conteúdo. Definições básicas;
 Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
EES-49/2012 Prova 1. Q1 Dado o seguinte conjunto de equações:
 Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
V. ANÁLISE NO DOMÍNIO DO TEMPO
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Sistemas lineares. Aula 7 Transformada Inversa de Laplace
 Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Controle de Processos Aula 14: Critério de Estabilidade (Bode)
") 107484 Controle de Processos Aula 14: Critério de Estabilidade (Bode) Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2018 E. S. Tognetti (UnB)
107484 Controle de Processos Aula 14: Critério de Estabilidade (Bode) Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2018 E. S. Tognetti (UnB)
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE
 RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
Estabilidade de Sistemas Lineares Realimentados
 Estabilidade de Sistemas Lineares Realimentados 1. Conceito de estabilidade 2. Critério de estabilidade de Routh-Hurwitz p.1 Engenharia de Controle Aula 6 Estabilidade de Sistemas Lineares Realimentados
Estabilidade de Sistemas Lineares Realimentados 1. Conceito de estabilidade 2. Critério de estabilidade de Routh-Hurwitz p.1 Engenharia de Controle Aula 6 Estabilidade de Sistemas Lineares Realimentados
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
SC1 Sistemas de Controle 1. Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
CRITÉRIO DE ESTABILIDADE DE ROUTH
 ENGENHARIA ELETRÔNICA DAELN UTFPR Prof. Paulo R. Brero de Campos CRITÉRIO DE ESTABILIDADE DE ROUTH Um sistema será estável quando todos os polos estiverem no semiplano esquerdo do plano S. Exemplo: G(s)
ENGENHARIA ELETRÔNICA DAELN UTFPR Prof. Paulo R. Brero de Campos CRITÉRIO DE ESTABILIDADE DE ROUTH Um sistema será estável quando todos os polos estiverem no semiplano esquerdo do plano S. Exemplo: G(s)
Método de Margem de Ganho
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS custo Método de Margem de Ganho Outros Processos e de de Fase Separação Prof a Ninoska Bojorge Resposta de
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS custo Método de Margem de Ganho Outros Processos e de de Fase Separação Prof a Ninoska Bojorge Resposta de
Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
Lugar Geométrico das Raízes (Root Locus)
") Lugar Geométrico das Raízes (Root Locus) ENGC4: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 18 de janeiro de 016 Prof. Tito Luís Maia Santos 1/
Lugar Geométrico das Raízes (Root Locus) ENGC4: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 18 de janeiro de 016 Prof. Tito Luís Maia Santos 1/
O método do lugar das raízes
 4 O método do lugar das raízes 4.1 Introdução Neste capítulo é apresentado o método do lugar das raízes, que consiste basicamente em levantar a localização dos pólos de um sistema em malha fechada em função
4 O método do lugar das raízes 4.1 Introdução Neste capítulo é apresentado o método do lugar das raízes, que consiste basicamente em levantar a localização dos pólos de um sistema em malha fechada em função
Aula 6 Transformada de Laplace
 Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
INTRO ao CONTROLO. 1º semestre 2013/2014. Transparências de apoio às aulas teóricas. Critério de Nyquist. Maria Isabel Ribeiro António Pascoal
 INTRO ao CONTROLO º semestre 3/4 Transparências de apoio às aulas teóricas Critério de Nyquist Maria Isabel Ribeiro António Pascoal Todos os direitos reservados Estas notas não podem ser usadas para fins
INTRO ao CONTROLO º semestre 3/4 Transparências de apoio às aulas teóricas Critério de Nyquist Maria Isabel Ribeiro António Pascoal Todos os direitos reservados Estas notas não podem ser usadas para fins
Análise do Lugar das Raízes
 Análise do Lugar das Raízes A característica básica da resposta transitória de um sistema de malha fechada, depende essencialmente da localização dos pólos de malha fechada. É importante, então, que o
Análise do Lugar das Raízes A característica básica da resposta transitória de um sistema de malha fechada, depende essencialmente da localização dos pólos de malha fechada. É importante, então, que o
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA
 CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos LUGAR DAS RAÍZES INTRODUÇÃO O método do Lugar das Raízes é uma
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos LUGAR DAS RAÍZES INTRODUÇÃO O método do Lugar das Raízes é uma
4.1 Pólos, Zeros e Resposta do Sistema
 ADL17 4.1 Pólos, Zeros e Resposta do Sistema A resposta de saída de um sistema é a soma de duas respostas: a resposta forçada e a resposta natural. Embora diversas técnicas, como a solução de equações
ADL17 4.1 Pólos, Zeros e Resposta do Sistema A resposta de saída de um sistema é a soma de duas respostas: a resposta forçada e a resposta natural. Embora diversas técnicas, como a solução de equações
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Aula 12 Root Locus LGR (Lugar Geométrico das Raízes) parte II
 parte II") Aula 12 Root Locus LGR (Lugar Geométrico das Raízes) parte II Recapitulando (da parte I): Sistema de malha fechada K O Root Locus é o lugar geométrico dos polos do sistema de malha fechada, quando K varia.
Aula 12 Root Locus LGR (Lugar Geométrico das Raízes) parte II Recapitulando (da parte I): Sistema de malha fechada K O Root Locus é o lugar geométrico dos polos do sistema de malha fechada, quando K varia.
Estabilidade de sistemas de controle lineares invariantes no tempo
 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
Estabilidade. Samir A. M. Martins 1. Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG
 Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
SCS Sistemas de Controle / Servomecanismos. Aula 04 Diagrama do lugar geométrico das raízes
 Aula 04 Diagrama do lugar geométrico das raízes Definição: O lugar das raízes de um sistema é um gráfico que representa a trajetória das raízes de sua equação característica pólos da função de transferência
Aula 04 Diagrama do lugar geométrico das raízes Definição: O lugar das raízes de um sistema é um gráfico que representa a trajetória das raízes de sua equação característica pólos da função de transferência
Método do lugar das Raízes
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Entender os objetivos do método do lugar das raízes Aprender a traçar o lugar das raízes Interpretar o
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Entender os objetivos do método do lugar das raízes Aprender a traçar o lugar das raízes Interpretar o
Sumário. CAPÍTULO 1 Introdução 1. CAPÍTULO 2 Terminologia dos Sistemas de Controle 14
 Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Métodos de Resposta em Frequência Parte 1. Controle de Sistemas Renato Dourado Maia (Unimontes)
") Métodos de Resposta em Frequência Parte 1 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Introdução Os métodos de resposta em frequência, desenvolvidos por Nyquist e Bode nos anos 30, são mais
Métodos de Resposta em Frequência Parte 1 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Introdução Os métodos de resposta em frequência, desenvolvidos por Nyquist e Bode nos anos 30, são mais
FUNDAMENTOS DE CONTROLE - EEL 7531
 Soluções periódicas e ciclos limite Funções descritivas FUNDAMENTOS DE CONTROLE - EEL 7531 Professor: Aguinaldo S. e Silva LABSPOT-EEL-UFSC 9 de junho de 2015 Professor: Aguinaldo S. e Silva FUNDAMENTOS
Soluções periódicas e ciclos limite Funções descritivas FUNDAMENTOS DE CONTROLE - EEL 7531 Professor: Aguinaldo S. e Silva LABSPOT-EEL-UFSC 9 de junho de 2015 Professor: Aguinaldo S. e Silva FUNDAMENTOS
Estabilidade de sistemas de controle lineares invariantes no tempo
 Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
II. REVISÃO DE FUNDAMENTOS
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
Departamento de Engenharia Química e de Petróleo UFF. Disciplina: TEQ102- CONTROLE DE PROCESSOS. Diagrama de Bode. Outros Processos de Separação
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ1- CONTROLE DE PROCESSOS custo Diagrama de Bode Outros Processos de Separação Prof a Ninoska Bojorge Informação Papel Bode 1 3 Papel
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ1- CONTROLE DE PROCESSOS custo Diagrama de Bode Outros Processos de Separação Prof a Ninoska Bojorge Informação Papel Bode 1 3 Papel
F6D370 - CONTROLE E SERVOMECAMISMOS II. No caso de sistemas contınuos, um sistema sera estavel se os polos (da
 F6D370 - CONTROLE E SERVOMECAMISMOS II 7. ESTABILIDADE DE SISTEMAS DISCRETOS 7. Introduãao No caso de sistemas contınuos, um sistema sera estavel se os polos (da funã o de transferencia em malha fechada)
F6D370 - CONTROLE E SERVOMECAMISMOS II 7. ESTABILIDADE DE SISTEMAS DISCRETOS 7. Introduãao No caso de sistemas contınuos, um sistema sera estavel se os polos (da funã o de transferencia em malha fechada)
3º ano 1º semestre 2007/2008
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano º semestre 7/8 Transparências de apoio às aulas
Mestrado Integrado em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano º semestre 7/8 Transparências de apoio às aulas
Método da Resposta da Freqüência
 Método da Resposta da Freqüência Introdução; Gráfico de Resposta de Freqüência; Medidas de Resposta de Freqüência; Especificação de Desempenho no Domínio da Freqüência; Diagrama Logarítmicos e de Magnitude
Método da Resposta da Freqüência Introdução; Gráfico de Resposta de Freqüência; Medidas de Resposta de Freqüência; Especificação de Desempenho no Domínio da Freqüência; Diagrama Logarítmicos e de Magnitude
Aula 19: Projeto de controladores no domínio da frequência
 Aula 19: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 14 de novembro de 2017. prof. Dr. Eduardo Bento Pereira
Aula 19: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 14 de novembro de 2017. prof. Dr. Eduardo Bento Pereira
AULA 3. CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência 1. Estabilidade relativa e o critério de Nyquist: margens de ganho e fase 2. Critérios de desempenho especificados no domínio da freqüência Resposta em freqüência
Estabilidade no Domínio da Freqüência 1. Estabilidade relativa e o critério de Nyquist: margens de ganho e fase 2. Critérios de desempenho especificados no domínio da freqüência Resposta em freqüência
Técnicas de Lugar das Raízes. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Técnicas de Lugar das Raízes Carlos Alexandre Mello 1 Introdução Lugar das raízes é um método de análise e projeto para estabilidade e resposta de transiente É uma representação gráfica dos polos de um
Técnicas de Lugar das Raízes Carlos Alexandre Mello 1 Introdução Lugar das raízes é um método de análise e projeto para estabilidade e resposta de transiente É uma representação gráfica dos polos de um
SC1 Sistemas de Controle 1. Cap. 2 - Estabilidade Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 2 - Estabilidade Prof. Tiago S Vítor Sumário 1. Introdução 2. Critério de Routh-Hurwitz 3. Critério de Routh-Hurwitz: Casos Especiais 4. Projeto de Estabilidade via Routh-Hurwitz
SC1 Sistemas de Controle 1 Cap. 2 - Estabilidade Prof. Tiago S Vítor Sumário 1. Introdução 2. Critério de Routh-Hurwitz 3. Critério de Routh-Hurwitz: Casos Especiais 4. Projeto de Estabilidade via Routh-Hurwitz
Indice. Resposta forçada (condições iniciais nulas)
") Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Analise sistemas LCIT usando a Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
Aula 11. Cristiano Quevedo Andrea 1. Curitiba, Outubro de DAELT - Departamento Acadêmico de Eletrotécnica
 Aula 11 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro de 2011. Resumo 1 Introdução - Lugar das Raízes
Aula 11 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro de 2011. Resumo 1 Introdução - Lugar das Raízes
Projeto de Filtros IIR. Métodos de Aproximação para Filtros Analógicos
 Projeto de Filtros IIR Métodos de Aproximação para Filtros Analógicos Introdução Especificações para filtros passa-baixas analógicos - Faixa de passagem: 0 W W p - Faixa de rejeição: W W r - Ripple na
Projeto de Filtros IIR Métodos de Aproximação para Filtros Analógicos Introdução Especificações para filtros passa-baixas analógicos - Faixa de passagem: 0 W W p - Faixa de rejeição: W W r - Ripple na
Estabilidade Interna. 1. Estabilidade Interna. 2. Análise de Estabilidade Segundo Lyapunov. 3. Teorema de Lyapunov
 Estabilidade Interna 1. Estabilidade Interna 2. Análise de Estabilidade Segundo Lyapunov 3. Teorema de Lyapunov 4. Teorema de Lyapunov Caso Discreto pag.1 Teoria de Sistemas Lineares Aula 13 Estabilidade
Estabilidade Interna 1. Estabilidade Interna 2. Análise de Estabilidade Segundo Lyapunov 3. Teorema de Lyapunov 4. Teorema de Lyapunov Caso Discreto pag.1 Teoria de Sistemas Lineares Aula 13 Estabilidade
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Transformada de Laplace
 Sinais e Sistemas Transformada de Laplace lco@ist.utl.pt Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
Sinais e Sistemas Transformada de Laplace lco@ist.utl.pt Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
DIAGRAMAS DE BODE, NYQUIST E NICHOLS
 DIAGRAMAS DE BODE, NYQUIST E NICHOLS Os diagramas de resposta em freqüência são muito úteis para analisar a estabilidade de um sistema realimentado. Existem 3 formas de analisar a resposta em freqüência
DIAGRAMAS DE BODE, NYQUIST E NICHOLS Os diagramas de resposta em freqüência são muito úteis para analisar a estabilidade de um sistema realimentado. Existem 3 formas de analisar a resposta em freqüência
Método do Lugar das Raízes
 Método do Lugar das Raízes 1. Esboçando o Lugar das Raízes (LR) pag.1 Controle de Sistemas Lineares Aula 9 O procedimento para esboçar o gráfico do Lugar das Raízes é realizado em 12 passos ordenados a
Método do Lugar das Raízes 1. Esboçando o Lugar das Raízes (LR) pag.1 Controle de Sistemas Lineares Aula 9 O procedimento para esboçar o gráfico do Lugar das Raízes é realizado em 12 passos ordenados a
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Resumo. Sinais e Sistemas Transformada de Laplace. Resposta ao Sinal Exponencial
 Resumo Sinais e Sistemas Transformada de aplace uís Caldas de Oliveira lco@istutlpt Instituto Superior Técnico Definição da transformada de aplace Região de convergência Propriedades da transformada de
Resumo Sinais e Sistemas Transformada de aplace uís Caldas de Oliveira lco@istutlpt Instituto Superior Técnico Definição da transformada de aplace Região de convergência Propriedades da transformada de
Análise de Sistemas no Domínio da Freqüência. Diagrama de Bode
 Análise de Sistemas no Domínio da Freqüência Diagrama de Bode Análise na Freqüência A análise da resposta em freqüência compreende o estudo do comportamento de um sistema dinâmico em regime permanente,
Análise de Sistemas no Domínio da Freqüência Diagrama de Bode Análise na Freqüência A análise da resposta em freqüência compreende o estudo do comportamento de um sistema dinâmico em regime permanente,
SEM Sistemas de Controle. Aula 4 - Controladores PID, Avanço, Atraso, Esp. Estados
 SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Grupo I. I. a) Considere o seguinte sistema e discuta a sua estabilidade.
 Considere o seguinte sistema e discuta a sua estabilidade.") Mestrado Integrado em Engª Mecânica e Licenciatura em Engª Naval Área Científica de Controlo, Automação e Informática Industrial Semestre de Inverno 2016/2017 1º Teste, 14 de novembro de 2016, 18h, Duração:
Mestrado Integrado em Engª Mecânica e Licenciatura em Engª Naval Área Científica de Controlo, Automação e Informática Industrial Semestre de Inverno 2016/2017 1º Teste, 14 de novembro de 2016, 18h, Duração:
Circuitos Elétricos II
 Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Transformada inversa de Laplace Definição Funções racionais Expansão em frações parciais
Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Transformada inversa de Laplace Definição Funções racionais Expansão em frações parciais
EES-20: Sistemas de Controle II. 20 Outubro 2017 (Tarde)
") EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
Controlo 4.ª AULA. Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente
 Docente") Escola Superior de Tecnologia de Setúbal Controlo 4.ª AULA Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente Prof.ª Sónia Marques
Escola Superior de Tecnologia de Setúbal Controlo 4.ª AULA Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente Prof.ª Sónia Marques
6-Análise de estabilidade de sistemas feedback 6.1- Noções de estabilidade
 6-Análise de estabilidade de sistemas feedback 6.- Noções de estabilidade Nos capítulos anteriores examinamos as características dinâmicas da resposta de sistemas em malha fechada e desenvolvemos a função
6-Análise de estabilidade de sistemas feedback 6.- Noções de estabilidade Nos capítulos anteriores examinamos as características dinâmicas da resposta de sistemas em malha fechada e desenvolvemos a função
EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018
 COTAÇÕES TESTE N0.2 Q3-3.1 [3v], 3.2 [2v], 3.3 [2v], 3.4 [1v] Q4-4.1 [6v], 4.2 [2v], 4.3 [3v], 4.4 [1v] EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018 8 valores 12 valores EXAME Q1-1.1 [1v],
COTAÇÕES TESTE N0.2 Q3-3.1 [3v], 3.2 [2v], 3.3 [2v], 3.4 [1v] Q4-4.1 [6v], 4.2 [2v], 4.3 [3v], 4.4 [1v] EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018 8 valores 12 valores EXAME Q1-1.1 [1v],
EES-49/2012 Resolução da Prova 3. 1 Dada a seguinte função de transferência em malha aberta: ( s 10)
") EES-49/2012 Resolução da Prova 3 1 Dada a seguinte função de transferência em malha aberta: ( s 10) Gs () ss ( 10) a) Esboce o diagrama de Nyquist e analise a estabilidade do sistema em malha fechada com
EES-49/2012 Resolução da Prova 3 1 Dada a seguinte função de transferência em malha aberta: ( s 10) Gs () ss ( 10) a) Esboce o diagrama de Nyquist e analise a estabilidade do sistema em malha fechada com
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
Papel Bode 2. Papel Bode 3
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ- CONTROLE DE PROCESSOS custo Diagrama Outros Processos de Bode: Traçado Separação por assíntotas Prof a Ninoska Bojorge Papel Bode Papel
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ- CONTROLE DE PROCESSOS custo Diagrama Outros Processos de Bode: Traçado Separação por assíntotas Prof a Ninoska Bojorge Papel Bode Papel
Transformada de Laplace
 Transformada de aplace Nas aulas anteriores foi visto que as ferramentas matemáticas de Fourier (série e transformadas) são de extrema importância na análise de sinais e de sistemas IT. Isto deve-se ao
Transformada de aplace Nas aulas anteriores foi visto que as ferramentas matemáticas de Fourier (série e transformadas) são de extrema importância na análise de sinais e de sistemas IT. Isto deve-se ao