Aula 6 Transformada de Laplace
|
|
|
- Gilberto Brandt
- 5 Há anos
- Visualizações:
Transcrição
1 Aula 6 Transformada de Laplace
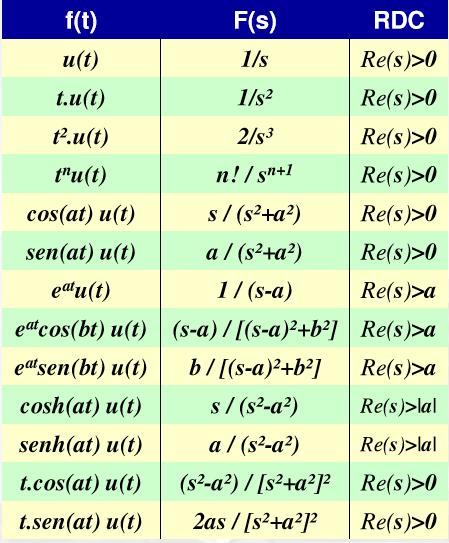
2 Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência
3 Definição: X s = L x t = s é uma variável complexa: s = σ + jω x(t)e st dt O resultado do cálculo da integral é função de s; O sinal x(t) e a sua Transformada de Laplace X(s) (e uma região de convergência) formam um par, expresso por: x(t) L X(s)
4 Seja X(s) uma função racional de s: X s = N(s) D(s) = b 0s m + b 1 s m b m a 0 s n + a 1 s n 1 = b 0 s z 1 (s z m ) + + a n a 0 s p 1 (s p n ) Pólos são raízes do polinômio do denominador, D(s): p 1 pn Zeros são raízes do polinômio do numerador, N(s): z 1 z n A função racional X(s) é dita ser própria se n > m A RDC não contém pólos, pois X(s) não converge nos pólos X(s) pode ser especificada completamente por seus zeros e pólos Graficamente, os pólos são representados por x e zeros por o

5
6

7
8 Exemplo 1: y t = e 2t u(t) + e 3t u(t) e 2t u(t) L 1 s+2, Re s > 2 e 3t u(t) L 1, Re s > 3 s+3 Y s = L e 2t u(t) + L e 3t u(t) Y s = 1 s , RDC: [Re s > 2] [Re s > 3] s + 3 Y s = 2s + 5, Re s > 2 (s + 2)(s + 3)
9 Exemplo 2: y t = e 2t u( t) + e 3t u(t) e 2t u( t) L 1 s 2, Re s < 2 e 3t u(t) L 1, Re s > 3 s+3 Y s = L e 2t u( t) + L e 3t u(t) Y s = 1 s 2 + 1, RDC: [Re s < 2] [Re s > 3] s + 3 Y s = 5, 3 < Re s < 2 (s 2)(s + 3)
10 Exemplo 3: y t = e 2t [u t u t 5 ] e 2t u(t) L 1 s+2, Re s > 2 e 2 t 5 u(t 5) L e 5s 1, Re s > 2 s+2 Y s = L e 2t u(t) L e 2t u t 5 = L e 2t u(t) L e 10 e 10 e 2t u t 5 Y s = 1 s + 2 e 10 e 5s, todo plano s s + 2 Y s = 1 e 5(s+2) (s + 2), todo plano s
11 Transformada Inversa de Laplace X(s) e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações Parciais Polos de Primeira Ordem polos distintos Polos de n-ésima Ordem polos repetidos
12 Fórmula Geral da Transformada Inversa de Laplace : x t = 1 2πj s X(s)e st ds que é uma integral de contorno no plano complexo s A solução desta integral pode ser obtida pelo Teorema de Resíduo de Cauchy Embora esta fórmula calcule a Transformada Inversa de Laplace, na prática usa-se procedimentos mais simples de busca em tabelas, para transformadas na forma racional
13 Uma transformada de Laplace é dita racional se ela é uma razão de polinômios em s: X s = N(s) D(s) = k s z 1 (s z m ) s p 1 (s p n ) Se X(s) for função racional própria (m < n), então ela pode ser invertida usando a expansão em frações parciais. Pólos simples (distintos): Os coeficientes são dados por: X s = k s z 1 (s z m ) s p 1 (s p n ) = c 1 s p c n s p n c i = s p i X(s) s=pi
14 Uma transformada de Laplace é dita racional se ela é uma razão de polinômios em s: X s = N(s) D(s) = k s z 1 (s z m ) s p 1 (s p n ) Se X(s) for função racional própria (m < n), então ela pode ser invertida usando a expansão em frações parciais. Pólos múltiplos (repetidos): X s = k s z 1 (s z m ) s p 1 (s p 1 ) = k s z 1 (s z m ) s p r 1 Os coeficientes são dados por: k i = 1 i! d i ds i [ s p i r X(s)] s=pi = k r 1 k s p 1 (s p n ) r
15 Exemplo 1: Resolução: X s = 2s + 4 s 2, Re s > 1 + 4s + 3 X s = 2s + 4 s 2 + 4s + 3 = c 1 s c 2 s + 3 c 1 = s + 1 X(s) s= 1 = 2s + 4 s + 3 s= 1 = 1 Como a RDC é Re(s) > 1, então a x(t) é unilateral direito: 2s + 4 c 2 = s + 3 X(s) = = 1 s= 3 s + 1 s= 3 X(s) = 1 s s + 3 x t = e t u t + e 3t u(t)
16 Exemplo 2: Resolução: X s = 2s + 4 s 2, Re s < 3 + 4s + 3 X s = 2s + 4 s 2 + 4s + 3 = c 1 s c 2 s + 3 c 1 = s + 1 X(s) s= 1 = 2s + 4 s + 3 s= 1 = 1 2s + 4 c 2 = s + 3 X(s) = = 1 s= 3 s + 1 s= 3 X(s) = 1 s s + 3 Como a RDC é Re s < 3, então a x(t) é unilateral esquerdo: x t = e t u t e 3t u( t)
17 Exemplo 3: Resolução: X s = 2s + 4 s 2, 3 < Re s < 1 + 4s + 3 X s = 2s + 4 s 2 + 4s + 3 = c 1 s c 2 s + 3 c 1 = s + 1 X(s) s= 1 = 2s + 4 s + 3 s= 1 = 1 Como a RDC é Re s < 3, então a x(t) é bilateral: 2s + 4 c 2 = s + 3 X(s) = = 1 s= 3 s + 1 s= 3 X(s) = 1 s s + 3 x t = e t u t + e 3t u(t)
18 Exemplo 4: Resolução: X s = s2 + 2s + 5 (s + 3)(s + 5) 2, Re s > 3 X s = c 1 s k 1 s k 0 (s + 5) 2 = 2 s s c 1 = s + 3 X(s) s= 3 = s 2 + 2s + 5 (s + 5) 2 k 0 = s X(s) = 10 s= 5 s= 3 (s + 5) 2 k 1 = d ds [ s X(s)] = d + 2s + 5 s= 5 ds [s2 ] = 1 s + 3 s= 5 Como a RDC é Re(s)>-3, x(t) é unilateral direito: = 2 x t = 2e 3t t e 5t u t 10te 5t u(t)
19 Função de transferência, ou Função Sistema, é definida como a Transformada de Laplace da Resposta Impulsiva de um SLIT; y t = x t h t L Y s = X S H(s) H s = Y s X(s) x(t) h(t) y(t) X(s) H(s) Y(s)
20 Algumas propriedades dos SLIT s podem ser associadas às características de H(s) no plano s: Causalidade: a RDC deve ser a região à direita de todos os pólos Estabilidade: a RDC deve conter o eixo vertical s = jω Sistemas causais e estáveis: Todos os pólos da função de transferência destes sitemas devem estar no semi-plano esquerdo do plano s (todos com partes reais negativas) e a RDC deve conter o eixo vertical Re s > σ máx σ máx < 0
21 Relembrando: Equação diferencial geral que descreve um sistema: d N y(t) dt N + a d N 1 y(t) dy t 1 dt N a N 1 dt = b N M d M x t dt M + b N M+1 d M 1 x t dt M 1 + a N y(t) + + b N 1 dx t dt + b N x(t) Aplicando a Transformada de Laplace e considerando as condições iniciais nulas: s N Y s + a 1 s N 1 Y s + + a N Y s = b N M s N X s + b N M 1 s M 1 X s + + b N X s H s = Y(s) X(s) = b N Ms N + b N M 1 s M b N s N + a 1 s N a N
22 i(t) Circuito RC: Entrada: x t = v s t Saída: y t = v c t Aplicando Laplace: dy(t) dt y t = x t RC RC sy s Y s = X s RC RC AC + v s (t) - R + v c (t) - C Aplicando inversa: H s = Y(s) X(s) = 1/RC s + 1/RC h t = 1 RC e t/rc u(t)
23 Circuito RLC: Usando L = 1 H, R = 3 Ω e C = 0,5 F, determine a função de transferência do circuito considerando v s (t) como sinal de entrada e v c (t) como sinal de saída. Pode-se realizar a análise do circuito no domínio da frequêcia fazendo as considerações: v(t) i(t) R L C V(s) I(s) R sl 1/sC AC i(t) + v s (t) - R L + v c (t) - C
24 Circuito RLC: Usando L = 1 H, R = 3 Ω e C = 0,5 F, determine a função de transferência do circuito considerando v s (t) como sinal de entrada e v c (t) como sinal de saída. H s = Y S = H S = Y(s) X(s) = 1 src + s 2 LC + 1 = 1 sc R + sl + 1 X(s) sc 1 sc R + sl + 1 sc 1/LC s 2 + sr L + 1/LC = AC i(t) + v s (t) - 2 s 2 + 3s + 2 R L + v c (t) - C
25 LATHI, B. P. Sinais e sistemas lineares. 2. Ed. Porto Alegre: Bookman, p. ISBN HAYKIN, Simon S. Sinais e sistemas. Porto Alegre: Bookman, p.
Sistemas lineares. Aula 7 Transformada Inversa de Laplace
 Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas lineares. Aula 6 Transformada de Laplace
 Sistemas lineares Aula 6 Transformada de Laplace Introdução Transformada de Laplace Convergência da transformada de laplace Exemplos Região de Convergência Introdução Transformações matemáticas: Logaritmo:
Sistemas lineares Aula 6 Transformada de Laplace Introdução Transformada de Laplace Convergência da transformada de laplace Exemplos Região de Convergência Introdução Transformações matemáticas: Logaritmo:
Sistemas lineares. Aula 4 Respostas de um SLIT
 Sistemas lineares Aula 4 Respostas de um SLIT Cronograma Introdução Características de um SLIT Resposta ao degrau unitário Resposta a entrada nula Resposta total Introdução A convolução entre dois sinais
Sistemas lineares Aula 4 Respostas de um SLIT Cronograma Introdução Características de um SLIT Resposta ao degrau unitário Resposta a entrada nula Resposta total Introdução A convolução entre dois sinais
Aula 4 Respostas de um SLIT
 Aula 4 Respostas de um SLIT Introdução Características de um SLIT Resposta ao degrau unitário Resposta a entrada nula Resposta total A convolução entre dois sinais de tempo contínuo x(t) e h(t) é dada
Aula 4 Respostas de um SLIT Introdução Características de um SLIT Resposta ao degrau unitário Resposta a entrada nula Resposta total A convolução entre dois sinais de tempo contínuo x(t) e h(t) é dada
Transformada de Laplace
 Sinais e Sistemas Transformada de Laplace lco@ist.utl.pt Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
Sinais e Sistemas Transformada de Laplace lco@ist.utl.pt Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
Resumo. Sinais e Sistemas Transformada de Laplace. Resposta ao Sinal Exponencial
 Resumo Sinais e Sistemas Transformada de aplace uís Caldas de Oliveira lco@istutlpt Instituto Superior Técnico Definição da transformada de aplace Região de convergência Propriedades da transformada de
Resumo Sinais e Sistemas Transformada de aplace uís Caldas de Oliveira lco@istutlpt Instituto Superior Técnico Definição da transformada de aplace Região de convergência Propriedades da transformada de
Transformada de Laplace
 Transformada de Laplace Monitoria de Sinais e Sistemas Lineares 04/11/09 Monitoria de Sinais e Sistemas Lineares () Transformada de Laplace 04/11/09 1 / 19 Transformadas Transformada de Laplace X(s) =
Transformada de Laplace Monitoria de Sinais e Sistemas Lineares 04/11/09 Monitoria de Sinais e Sistemas Lineares () Transformada de Laplace 04/11/09 1 / 19 Transformadas Transformada de Laplace X(s) =
Circuitos Elétricos II
 Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Transformada inversa de Laplace Definição Funções racionais Expansão em frações parciais
Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Transformada inversa de Laplace Definição Funções racionais Expansão em frações parciais
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 12. Transformada de Laplace II
 Aula 12 Transformada de Laplace II Matérias que serão discutidas Nilsson Circuitos Elétricos Capítulos 12, 13 e 14 LAPLACE Capítulo 8 Circuitos de Segunda ordem no domínio do tempo Revisão A transformada
Aula 12 Transformada de Laplace II Matérias que serão discutidas Nilsson Circuitos Elétricos Capítulos 12, 13 e 14 LAPLACE Capítulo 8 Circuitos de Segunda ordem no domínio do tempo Revisão A transformada
EN2607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 3 quadrimestre 2012
 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 fevereiro 03 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 3 quadrimestre 0
EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 fevereiro 03 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 3 quadrimestre 0
Representação e Análise de Sistemas Dinâmicos Lineares Componentes Básicos de um Sistema de Controle
 Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Aula 04 Representação de Sistemas
 Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Transformadas de Laplace Engenharia Mecânica - FAENG. Prof. Josemar dos Santos
 Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
EN2607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 2 2 quadrimestre 2011
 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares quadrimestre 0 (P-0003D) (HAYKIN, 00, p 9) Use a equação de definição da TF para obter a representação no domínio da
EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares quadrimestre 0 (P-0003D) (HAYKIN, 00, p 9) Use a equação de definição da TF para obter a representação no domínio da
Aula 11. Revisão de Fasores e Introdução a Laplace
 Aula Revisão de Fasores e Introdução a Laplace Revisão - Fasor Definição: Fasor é a representação complexa da magnitude e fase de uma senoide. V = V m e jφ = V m φ v t = V m cos(wt + φ) = R(V e jwt ) Impedância
Aula Revisão de Fasores e Introdução a Laplace Revisão - Fasor Definição: Fasor é a representação complexa da magnitude e fase de uma senoide. V = V m e jφ = V m φ v t = V m cos(wt + φ) = R(V e jwt ) Impedância
A Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
Transformada Z. Transformada Z Bilateral. Transformada de Fourier e Transformada Z. A transformada de Fourier não converge para todas as sequências.
 Transformada Z Luís Caldas de Oliveira Introdução A transformada de Fourier não converge para todas as sequências. A transformada Z abrange uma maior classe de sinais. sumo 1. Definição 2. gião de Convergência
Transformada Z Luís Caldas de Oliveira Introdução A transformada de Fourier não converge para todas as sequências. A transformada Z abrange uma maior classe de sinais. sumo 1. Definição 2. gião de Convergência
Transformada de Laplace
 Transformada de aplace Nas aulas anteriores foi visto que as ferramentas matemáticas de Fourier (série e transformadas) são de extrema importância na análise de sinais e de sistemas IT. Isto deve-se ao
Transformada de aplace Nas aulas anteriores foi visto que as ferramentas matemáticas de Fourier (série e transformadas) são de extrema importância na análise de sinais e de sistemas IT. Isto deve-se ao
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
 O método das frações parciais usa o conhecimento de diversos pares de transformada Z básicos e as propriedades da transformada Z para obtenção da transformada Z inversa das funções de interesse Admite-se
O método das frações parciais usa o conhecimento de diversos pares de transformada Z básicos e as propriedades da transformada Z para obtenção da transformada Z inversa das funções de interesse Admite-se
Sistemas de Controle
 Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Capítulo 2 Dinâmica de Sistemas Lineares
 Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Aula 3. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Escola Politécnica Universidade de São Paulo
 Escola Politécnica Universidade de São Paulo PSI3213 Circuitos Elétricos II Bloco 1 Transformada de Laplace Prof a Denise Consonni Introdução à Transformada de Laplace Solução de Circuitos no Domínio do
Escola Politécnica Universidade de São Paulo PSI3213 Circuitos Elétricos II Bloco 1 Transformada de Laplace Prof a Denise Consonni Introdução à Transformada de Laplace Solução de Circuitos no Domínio do
Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Fundamentos de Controle
 Fundamentos de Controle Modelagem matemática de sistemas de controle Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui
Fundamentos de Controle Modelagem matemática de sistemas de controle Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui
II. REVISÃO DE FUNDAMENTOS
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
Circuitos Elétricos III
 Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais Transformadas Inversas Transformada Inversa de Laplace V(s) é
Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais Transformadas Inversas Transformada Inversa de Laplace V(s) é
Indice Introdução Sistemas contínuos descritos por equações diferenciais lineares de coeficientes constantes... 75
 , Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
, Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
Transformada de Laplace aplicada a circuitos elétricos
 Escola Politécnica da USP Departamento de Engenharia de Sistemas Eletrônicos Transformada de Laplace aplicada a circuitos elétricos Magno T. M. Silva Junho de 25 Sumário Introdução 2 2 Definição 4 3 Existência
Escola Politécnica da USP Departamento de Engenharia de Sistemas Eletrônicos Transformada de Laplace aplicada a circuitos elétricos Magno T. M. Silva Junho de 25 Sumário Introdução 2 2 Definição 4 3 Existência
Parte I O teste tem uma parte de resposta múltipla (Parte I) e uma parte de resolução livre (Parte II)
 e uma parte de resolução livre (Parte II)") Instituto Superior Técnico Sinais e Sistemas o teste 4 de Novembro de 0 Nome: Número: Duração da prova: horas Parte I O teste tem uma parte de resposta múltipla (Parte I) e uma parte de resolução livre
Instituto Superior Técnico Sinais e Sistemas o teste 4 de Novembro de 0 Nome: Número: Duração da prova: horas Parte I O teste tem uma parte de resposta múltipla (Parte I) e uma parte de resolução livre
Fundamentos de Controlo
 Fundamentos de Controlo a Série Resposta no Tempo de Sistemas Causais. S.1 Exercícios Resolvidos P.1 Seja H(s) = s (s + ) a função de transferência de um SLIT contínuo causal. Qual dos sinais da Figura
Fundamentos de Controlo a Série Resposta no Tempo de Sistemas Causais. S.1 Exercícios Resolvidos P.1 Seja H(s) = s (s + ) a função de transferência de um SLIT contínuo causal. Qual dos sinais da Figura
Aula 14. Transformada de Laplace IV
 Aula 14 Transformada de Laplace IV Matérias que serão discutidas Nilsson Circuitos Elétricos Capítulos 1, 13 e 14 LAPLACE Capítulo 8 Circuitos de Segunda ordem no domínio do tempo Circuitos de Segunda
Aula 14 Transformada de Laplace IV Matérias que serão discutidas Nilsson Circuitos Elétricos Capítulos 1, 13 e 14 LAPLACE Capítulo 8 Circuitos de Segunda ordem no domínio do tempo Circuitos de Segunda
Circuitos Elétricos II
 Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Ganho e Deslocamento de Fase Função de Rede (ou de Transferência) Estabilidade 1 Definições
Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Ganho e Deslocamento de Fase Função de Rede (ou de Transferência) Estabilidade 1 Definições
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap2 - Modelagem no Domínio de Frequência Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap2 - Modelagem no Domínio de Frequência Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos
O Papel dos Pólos e Zeros
 Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Pontifícia Universidade Católica de Goiás. Engenharia de Controle e Automação. Prof: Marcos Lajovic Carneiro Aluno (a):
:") Pontifícia Universidade Católica de Goiás Departamento de Engenharia Laboratório ENG 3502 Controle de Processos 01 Prof: Marcos Lajovic Carneiro Aluno (a): Aula Prática 01 Polinômios, frações parciais,
Pontifícia Universidade Católica de Goiás Departamento de Engenharia Laboratório ENG 3502 Controle de Processos 01 Prof: Marcos Lajovic Carneiro Aluno (a): Aula Prática 01 Polinômios, frações parciais,
Instrumentação e Controle Aula 7. Estabilidade. Prof. Renato Watanabe ESTO004-17
 Instrumentação e Controle Aula 7 Estabilidade Prof. Renato Watanabe ESTO004-17 Onde estamos no curso Sistema Obtenção das Equações Diferenciais que descrevem o comportamento do sistema Representação no
Instrumentação e Controle Aula 7 Estabilidade Prof. Renato Watanabe ESTO004-17 Onde estamos no curso Sistema Obtenção das Equações Diferenciais que descrevem o comportamento do sistema Representação no
Análise Complexa e Equações Diferenciais Exame B de 30 de junho de 2014 Cursos: LEAN, LMAC, MEBiom, MEFT, MEMec
 Análise Complexa e Equações Diferenciais Exame B de 3 de junho de 4 Cursos: LEAN, LMAC, MEBiom, MEFT, MEMec [ val.] RESOLUÇÃO INÍCIO DA PRIMEIRO PARTE. Considere a função u(x, y) = 3xy x 3. (a) Escreva
Análise Complexa e Equações Diferenciais Exame B de 3 de junho de 4 Cursos: LEAN, LMAC, MEBiom, MEFT, MEMec [ val.] RESOLUÇÃO INÍCIO DA PRIMEIRO PARTE. Considere a função u(x, y) = 3xy x 3. (a) Escreva
INTRODUÇÃO À ANALISE DE SINAIS ELT 032
 INTRODUÇÃO À ANALISE DE SINAIS ELT 032 Prof. Jeremias Barbosa Machado Introdução Neste capítulo estudaremos as Transformadas de Laplace. Elas apresentam uma representação de sinais no domínio da frequência
INTRODUÇÃO À ANALISE DE SINAIS ELT 032 Prof. Jeremias Barbosa Machado Introdução Neste capítulo estudaremos as Transformadas de Laplace. Elas apresentam uma representação de sinais no domínio da frequência
Análise de Sistemas em Tempo Contínuo usando a Transformada de Laplace
 Análise de Sistemas em Tempo Contínuo usando a Transformada de Laplace Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do
Análise de Sistemas em Tempo Contínuo usando a Transformada de Laplace Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do
Análise no Domínio do Tempo de Sistemas em Tempo Contínuo
 Análise no Domínio do Tempo de Sistemas em Tempo Contínuo Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do São Francisco
Análise no Domínio do Tempo de Sistemas em Tempo Contínuo Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do São Francisco
Resumo. Sinais e Sistemas Transformada de Laplace. Resposta ao Sinal Exponencial. Transformada de Laplace
 Resumo Sinais e Sistemas Transformada de aplace lco@ist.utl.pt Instituto Superior Técnico Definição da transformada de aplace. Região de convergência. Propriedades da transformada de aplace. Sistemas caracterizados
Resumo Sinais e Sistemas Transformada de aplace lco@ist.utl.pt Instituto Superior Técnico Definição da transformada de aplace. Região de convergência. Propriedades da transformada de aplace. Sistemas caracterizados
Análise de Sistemas em Tempo Discreto usando a Transformada Z
 Análise de Sistemas em Tempo Discreto usando a Transformada Z Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do São Francisco
Análise de Sistemas em Tempo Discreto usando a Transformada Z Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do São Francisco
Sistemas lineares. Aula 3 Sistemas Lineares Invariantes no Tempo
 Sistemas lineares Aula 3 Sistemas Lineares Invariantes no Tempo SLIT Introdução Resposta de um SLIT Resposta de Entrada Nula Resposta de Estado Nulo Resposta ao Impulso Unitária Introdução Sistemas: Modelo
Sistemas lineares Aula 3 Sistemas Lineares Invariantes no Tempo SLIT Introdução Resposta de um SLIT Resposta de Entrada Nula Resposta de Estado Nulo Resposta ao Impulso Unitária Introdução Sistemas: Modelo
Processamento Digital de Sinais - ENG420
 Processamento Digital de Sinais - ENG420 Fabrício Simões IFBA 24 de setembro de 2016 Fabrício Simões (IFBA) Processamento Digital de Sinais - ENG420 24 de setembro de 2016 1 / 19 1 Transformada Z - Conceito
Processamento Digital de Sinais - ENG420 Fabrício Simões IFBA 24 de setembro de 2016 Fabrício Simões (IFBA) Processamento Digital de Sinais - ENG420 24 de setembro de 2016 1 / 19 1 Transformada Z - Conceito
2. Modelos Lineares de Espaço de Estados. e resposta ao impulso. Método para o cálculo das soluções: através do uso de transformadas de Laplace
 2.3 - Solução das equações de espaço de estados, função de transferência e resposta ao impulso Método para o cálculo das soluções: através do uso de transformadas de Laplace Transformadas de Laplace f
2.3 - Solução das equações de espaço de estados, função de transferência e resposta ao impulso Método para o cálculo das soluções: através do uso de transformadas de Laplace Transformadas de Laplace f
Requisitos de Projeto
 Instrumentação e Controle Aula 3 Requisitos de Projeto Prof. Renato Watanabe ESTO004-7 Onde estamos no curso Sistema Realimentação Sensores Obtenção das Equações Diferenciais que descrevem o comportamento
Instrumentação e Controle Aula 3 Requisitos de Projeto Prof. Renato Watanabe ESTO004-7 Onde estamos no curso Sistema Realimentação Sensores Obtenção das Equações Diferenciais que descrevem o comportamento
Capítulo 2: Modelos Matemáticos de Sistemas -Sinais e Sistemas 1 -
 Modelos Matemáticos de Sistemas -Sinais e Sistemas 1 - Objetivos Sinais Sistemas 1 Sistemas Eletro Entender o que significa fisicamente e matematicamente a transformada de Laplace Encontrar a transformada
Modelos Matemáticos de Sistemas -Sinais e Sistemas 1 - Objetivos Sinais Sistemas 1 Sistemas Eletro Entender o que significa fisicamente e matematicamente a transformada de Laplace Encontrar a transformada
Transformada de Laplace. Transformada de Laplace (CP1) DEQ/UFSCar 1 / 76
 DEQ/UFSCar 1 / 76") Transformada de Laplace Transformada de Laplace (CP) www.professores.deq.ufscar.br/ronaldo/cp DEQ/UFSCar / 76 Roteiro I Introdução Definição da Transformada Transformada de Laplace de Algumas Funções Transformada
Transformada de Laplace Transformada de Laplace (CP) www.professores.deq.ufscar.br/ronaldo/cp DEQ/UFSCar / 76 Roteiro I Introdução Definição da Transformada Transformada de Laplace de Algumas Funções Transformada
Universidade Federal do Rio de Janeiro. Circuitos Elétricos I EEL 420. Módulo 11
 Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Sinais e Sistemas Exame Data: 18/1/2018. Duração: 3 horas
 Sinais e Sistemas Exame Data: 8//28. Duração: 3 horas Número: Nome: Identique este enunciado e a folha de respostas com o seu número e os seus primeiro e último nomes. Para as questões a 9, indique as
Sinais e Sistemas Exame Data: 8//28. Duração: 3 horas Número: Nome: Identique este enunciado e a folha de respostas com o seu número e os seus primeiro e último nomes. Para as questões a 9, indique as
Controle de Processos
 17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 217 E. S. Tognetti (UnB) Controle
17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 217 E. S. Tognetti (UnB) Controle
Estabilidade. 1. Estabilidade Entrada-Saída Sistemas LIT. 2. Estabilidade BIBO Sistemas LIT. 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT
 Estabilidade 1. Estabilidade Entrada-Saída Sistemas LIT 2. Estabilidade BIBO Sistemas LIT 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT 4. Sistemas Discretos LIT 5. Estabilidade BIBO Sistemas
Estabilidade 1. Estabilidade Entrada-Saída Sistemas LIT 2. Estabilidade BIBO Sistemas LIT 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT 4. Sistemas Discretos LIT 5. Estabilidade BIBO Sistemas
Análise e Processamento de Bio-Sinais. Mestrado Integrado em Engenharia Biomédica. Sinais e Sistemas. Licenciatura em Engenharia Física
 Análise e Processamento de Bio-Sinais Mestrado Integrado em Engenharia Biomédica Licenciatura em Engenharia Física Faculdade de Ciências e Tecnologia Slide 1 Slide 1 Tópicos: Representação de Sinais por
Análise e Processamento de Bio-Sinais Mestrado Integrado em Engenharia Biomédica Licenciatura em Engenharia Física Faculdade de Ciências e Tecnologia Slide 1 Slide 1 Tópicos: Representação de Sinais por
Introdução aos Circuitos Elétricos
 Introdução aos Circuitos Elétricos A Transformada de Laplace Prof. Roberto Alves Braga Jr. Prof. Bruno Henrique Groenner Barbosa UFLA - Departamento de Engenharia A Transformada de Laplace História Pierri
Introdução aos Circuitos Elétricos A Transformada de Laplace Prof. Roberto Alves Braga Jr. Prof. Bruno Henrique Groenner Barbosa UFLA - Departamento de Engenharia A Transformada de Laplace História Pierri
Estabilidade de sistemas de controle lineares invariantes no tempo
 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
Aula 18 Propriedades da Transformada Z Transformada Z inversa
 Processamento Digital de Sinais Aula 8 Professor Marcio Eisencraft abril 0 Aula 8 Propriedades da Transformada Z Transformada Z inversa Bibliografia OPPENHEIM, A.V.; WILLSKY, A. S. Sinais e Sistemas, a
Processamento Digital de Sinais Aula 8 Professor Marcio Eisencraft abril 0 Aula 8 Propriedades da Transformada Z Transformada Z inversa Bibliografia OPPENHEIM, A.V.; WILLSKY, A. S. Sinais e Sistemas, a
DESCRIÇÃO MATEMÁTICA DE SISTEMAS PARTE 1
 DESRIÇÃO MATEMÁTIA DE SISTEMAS PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Agenda Modelagem de sistemas dinâmicos Descrição Entrada-Saída
DESRIÇÃO MATEMÁTIA DE SISTEMAS PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Agenda Modelagem de sistemas dinâmicos Descrição Entrada-Saída
Análise de Laplace. Prof. André E. Lazzaretti
 Análise de Laplace Prof. André E. Lazzaretti lazzaretti@utfpr.edu.br Introdução Objetivo principal: resolução de equações diferenciais; Similar à análise fasorial: transformação para o domínio da frequência;
Análise de Laplace Prof. André E. Lazzaretti lazzaretti@utfpr.edu.br Introdução Objetivo principal: resolução de equações diferenciais; Similar à análise fasorial: transformação para o domínio da frequência;
Sinais e Sistemas p.1/33
 Resumo Sinais e Sistemas Transformada de Fourier de Sinais Contínuos lco@ist.utl.pt Representação de sinais aperiódicos Transformada de Fourier de sinais periódicos Propriedades da transformada de Fourier
Resumo Sinais e Sistemas Transformada de Fourier de Sinais Contínuos lco@ist.utl.pt Representação de sinais aperiódicos Transformada de Fourier de sinais periódicos Propriedades da transformada de Fourier
5 Descrição entrada-saída
 Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
1 Modelagem de Sistemas Lineares baseados em Circuitos
 Universidade Federal do io de Janeiro Departamento de Engenharia Eletrônica e de omputação 5/ Lista Data de Expedição: 7//5 Limite de Tempo: Semana Data de Entrega: //5 Tabela de Pontos (favor não preencher)
Universidade Federal do io de Janeiro Departamento de Engenharia Eletrônica e de omputação 5/ Lista Data de Expedição: 7//5 Limite de Tempo: Semana Data de Entrega: //5 Tabela de Pontos (favor não preencher)
Redução de Múltiplos Subsistemas. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Redução de Múltiplos Subsistemas Carlos Alexandre Mello 1 Introdução Sistemas mais complexos são compostos por diversos subsistemas Queremos representar múltiplos subsistemas com apenas uma função de transferência
Redução de Múltiplos Subsistemas Carlos Alexandre Mello 1 Introdução Sistemas mais complexos são compostos por diversos subsistemas Queremos representar múltiplos subsistemas com apenas uma função de transferência
UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS CURSO DE ENGENHARIA DA COMPUTAÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS CURSO DE ENGENHARIA DA COMPUTAÇÃO O que veremos na aula de hoje Transformadas Direta e Inversa de Laplace Técnicas de Frações Parciais
UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS CURSO DE ENGENHARIA DA COMPUTAÇÃO O que veremos na aula de hoje Transformadas Direta e Inversa de Laplace Técnicas de Frações Parciais
IV. ESTABILIDADE DE SISTEMAS LIT
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INTRODUÇÃO À TRANSFORMADA Z. Wilson Arnaldo Artuzi Junior Ricardo Rodrigo Wolf Cruz
 INTRODUÇÃO À TRANSFORMADA Z Wilson Arnaldo Artui Junior Ricardo Rodrigo Wolf Cru CURITIBA 2010 Sumário 1 - Introdução...1 1.1 - Definição:...1 a) Domínio do tempo discreto n...1 b) Domínio...2 c) Par transformado...2
INTRODUÇÃO À TRANSFORMADA Z Wilson Arnaldo Artui Junior Ricardo Rodrigo Wolf Cru CURITIBA 2010 Sumário 1 - Introdução...1 1.1 - Definição:...1 a) Domínio do tempo discreto n...1 b) Domínio...2 c) Par transformado...2
Analise sistemas LCIT usando a Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
5 Transformadas de Laplace
 5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
Transformada de Laplace Inversa Expansão em Frações Parciais
 Transformada de Laplace Inversa Expansão em Frações Parciais 1 Introdução Estamos interessados em determinar a transformada inversa de uma função da forma D(s) = a ms m + a m 1 s m 1 +... + a 1 s + a 0
Transformada de Laplace Inversa Expansão em Frações Parciais 1 Introdução Estamos interessados em determinar a transformada inversa de uma função da forma D(s) = a ms m + a m 1 s m 1 +... + a 1 s + a 0
Transformada Z. A transformada Z de uma sequência x n é definida como:
 Transformada Z Vimos que as DTFTs de algumas sequências não convergem uniformemente para funções contínuas de ω, porque as sequências não são absolutamente somáveis. A transformada Z permitirá a análise
Transformada Z Vimos que as DTFTs de algumas sequências não convergem uniformemente para funções contínuas de ω, porque as sequências não são absolutamente somáveis. A transformada Z permitirá a análise
Sistemas e Sinais (LEE & LETI)
") Sistemas e Sinais (LEE & LETI) o teste - de Julho de 05 Duração da prova: hora e 30 minutos Atenção:. Identique todas as folhas.. O teste é constituído por questões de escolha múltipla e por questões de
Sistemas e Sinais (LEE & LETI) o teste - de Julho de 05 Duração da prova: hora e 30 minutos Atenção:. Identique todas as folhas.. O teste é constituído por questões de escolha múltipla e por questões de
Estabilidade de sistemas de controle lineares invariantes no tempo
 Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Teste Tipo. Sinais e Sistemas (LERCI) 2004/2005. Outubro de Respostas
 2004/2005. Outubro de Respostas") Teste Tipo Sinais e Sistemas (LERCI) 2004/2005 Outubro de 2004 Respostas i Problema. Considere o seguinte integral: + 0 δ(t π/4) cos(t)dt em que t e δ(t) é a função delta de Dirac. O integral vale: 2/2
Teste Tipo Sinais e Sistemas (LERCI) 2004/2005 Outubro de 2004 Respostas i Problema. Considere o seguinte integral: + 0 δ(t π/4) cos(t)dt em que t e δ(t) é a função delta de Dirac. O integral vale: 2/2
Transformada de Laplace. Transformada de Laplace
 A generalização da representação por senóides complexas de um sinal de tempo contínuo fornecida pela Transformada de Fourier é realizada em termos de sinais exponenciais complexos pela. A Transformada
A generalização da representação por senóides complexas de um sinal de tempo contínuo fornecida pela Transformada de Fourier é realizada em termos de sinais exponenciais complexos pela. A Transformada
Sinais e Sistemas Exame Data: 11/6/2018. Duração: 3 horas
 Sinais e Sistemas Exame Data: /6/. Duração: 3 horas Número: Nome: Identique este enunciado e a folha de respostas com o seu número e os seus primeiro e último nomes. Para as questões a, indique as suas
Sinais e Sistemas Exame Data: /6/. Duração: 3 horas Número: Nome: Identique este enunciado e a folha de respostas com o seu número e os seus primeiro e último nomes. Para as questões a, indique as suas
Princípios de Controle Robusto
 Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
1. Sinais de teste. 2. Sistemas de primeira ordem. 3. Sistemas de segunda ordem. Especificações para a resposta
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
Controle de Processos Aula: Sistemas de 1ª e 2ª ordem
 107484 Controle de Processos Aula: Sistemas de 1ª e 2ª ordem Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistemas de 1ª e 2ª ordem Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
TRANSFORMADA DE LAPLACE E OPERADORES LINEARES
 TRANSFORMADA DE LAPLACE E OPERADORES LINEARES O DOMÍNIO DE LAPLACE Usualmente trabalhamos com situações que variam no tempo (t), ou seja, trabalhamos no domínio do tempo. O domínio de Laplace é um domínio
TRANSFORMADA DE LAPLACE E OPERADORES LINEARES O DOMÍNIO DE LAPLACE Usualmente trabalhamos com situações que variam no tempo (t), ou seja, trabalhamos no domínio do tempo. O domínio de Laplace é um domínio
Universidade Federal do Rio de Janeiro. Circuitos Elétricos I EEL 420. Módulo 11
 Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Estabilidade. Samir A. M. Martins 1. Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG
 Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
Modelagem Matemática de Sistemas
 Modelagem Matemática de Sistemas 1. Descrição Matemática de Sistemas 2. Descrição Entrada-Saída 3. Exemplos pag.1 Teoria de Sistemas Lineares Aula 3 Descrição Matemática de Sistemas u(t) Sistema y(t) Para
Modelagem Matemática de Sistemas 1. Descrição Matemática de Sistemas 2. Descrição Entrada-Saída 3. Exemplos pag.1 Teoria de Sistemas Lineares Aula 3 Descrição Matemática de Sistemas u(t) Sistema y(t) Para
Circuitos Elétricos II
 Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Transformada de Laplace Definição da Transformada de Laplace Propriedades da Transformada
Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Transformada de Laplace Definição da Transformada de Laplace Propriedades da Transformada
CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
 PETROBRAS ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELETRÔNICA ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELÉTRICA ENGENHEIRO(A) JÚNIOR - ÁREA: AUTOMAÇÃO CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
PETROBRAS ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELETRÔNICA ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELÉTRICA ENGENHEIRO(A) JÚNIOR - ÁREA: AUTOMAÇÃO CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
Instrumentação e Controle Aula 14. Prof. Renato Watanabe ESTO004-17
 Instrumentação e Controle Aula 14 Finalização Prof. Renato Watanabe ESTO004-17 Onde estamos no curso Sistema Realimentação Sensores Obtenção das Equações Diferenciais que descrevem o comportamento do sistema
Instrumentação e Controle Aula 14 Finalização Prof. Renato Watanabe ESTO004-17 Onde estamos no curso Sistema Realimentação Sensores Obtenção das Equações Diferenciais que descrevem o comportamento do sistema
Controle de Processos
 17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 216 E. S. Tognetti (UnB) Controle
17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 216 E. S. Tognetti (UnB) Controle
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
 Função de Transferência Relação Entrada-Saída Desejamos obter a expressão M(s) = Y(s) R(s) Para obter essa expressão, devemos realizar uma analise de algebra de blocos. Perceba que a relação entre o sinal
Função de Transferência Relação Entrada-Saída Desejamos obter a expressão M(s) = Y(s) R(s) Para obter essa expressão, devemos realizar uma analise de algebra de blocos. Perceba que a relação entre o sinal
Disciplina: Instrumentação e Controle de Sistemas Mecânicos. Teoria de Controle Parte 2
 Disciplina: Instrumentação e Controle de Sistemas Mecânicos Teoria de Controle Parte 2 Sistemas de Primeira Ordem: Função de Transferência Pelo o que já foi dito, devido aos diferentes tipos de atraso,
Disciplina: Instrumentação e Controle de Sistemas Mecânicos Teoria de Controle Parte 2 Sistemas de Primeira Ordem: Função de Transferência Pelo o que já foi dito, devido aos diferentes tipos de atraso,
Transformada Z. Transformada Z
 Semelhante ao apresentado anteriormente, entre a relação das transformadas de Fourier e de Laplace, será visto que a generalização da representação senoidal complexa de um sinal de tempo discreto pela
Semelhante ao apresentado anteriormente, entre a relação das transformadas de Fourier e de Laplace, será visto que a generalização da representação senoidal complexa de um sinal de tempo discreto pela
PMR3404 Controle I Aula 2
 PMR3404 Controle I Aula 2 Pólos e zeros, Estabilidade, Critério de Estabilidade de Routh-Hurwitz Newton Maruyama 16 de março de 2017 PMR-EPUSP Introdução Introdução O cálculo da resposta no domínio do
PMR3404 Controle I Aula 2 Pólos e zeros, Estabilidade, Critério de Estabilidade de Routh-Hurwitz Newton Maruyama 16 de março de 2017 PMR-EPUSP Introdução Introdução O cálculo da resposta no domínio do
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Filipe Fraga Sistemas de Controle 1 4. Resposta no Domínio do Tempo 4.1 Introdução
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Filipe Fraga Sistemas de Controle 1 4. Resposta no Domínio do Tempo 4.1 Introdução