INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
|
|
|
- Ruy Amaral Silveira
- 5 Há anos
- Visualizações:
Transcrição





1 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos



2 Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo
3 Modelos matemáticos Método analítico (Leis físicas) Equações diferenciais,... Método experimental (Identificação) Mínimos quadrados,... Menor complexidade do modelo é melhor, sem prejudicar a representação da dinâmica
4 Equações diferenciais (domínio tempo) Equações diferenciais de primeira ordem e segunda ordem Equação característica determina o comportamento Equações diferenciais de ordem maior
5 Exercicios Circuitos elétricos (leis físicas, idealizações) R= 1 Kohm C= 2 mf Vc(0)= 0 V Vf(t)= 15u(t) L= 1H C= ½F R= 3 ohm Vc(0)= 10 V i(0)= 0 A Vf(t)= 15u(t); e outras formas
6 Transformada de Laplace (domínio frequência complexa) Importância para o controle As equações do sistema dinâmico são manipuladas algebricamente Funções de transferência e representação em diagrama de blocos Restrita aos sistemas lineares (ou linearizáveis num ponto) invariantes no tempo - SLIT
7 Transformada de Laplace Definição Propriedades TEOREMA DO VALOR FINAL TEOREMA DO VALOR INICIAL
8 Grupo de Pesquisa Educação e Tecnologia EDUCTEC INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Solução de equações diferenciais Transformada inversa de Laplace Transformada de Laplace ) ( ) ( ) ( ) ( ) ( t u b t u b t y a t y a t y a ) ( ) ( s U a s a s a b s b s Y Método das frações parciais assumindo c.i s nulas
9 Exercicios Circuitos elétricos R= 1 Kohm C= 2 mf Vc(0)= 0 V Vf(t)= 15u(t) L= 1H C= ½F R= 3 ohm Vc(0)= 10 V i(0)= 0 A Vf(t)= 15u(t)
10 Transformada de Laplace Funções de transferência e diagrama de blocos Motor de corrente continua Y ( s) G( s) U ( s) U(s) G(s) Y(s) Pólos e zeros de uma função de transferência
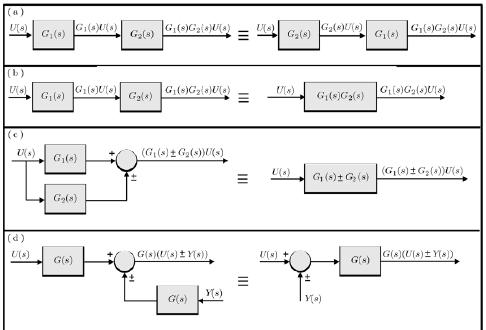

11 Transformada de Laplace Álgebra de blocos

12 Exercicios Motor de corrente continua em malha fechada realimentação
13 Exercicios Encontre Vs(s)/Vc(s) do circuito abaixo
 para r(t) sendo um degrau unitário; encontre y(0) e y(")
14 Exercicios Álgebra de blocos Determine Y(s)/R(s); encontre y(t) para r(t) sendo um degrau unitário; encontre y(0) e y( ).


15 Transformada de Laplace Efeito da localização dos polos da FT; são os polos que definem o comportamento Lembrar da equação característica das equações diferenciais
16 Transformada de Laplace Linearização Analogia Elétrica A.4-1 a A.4-4 Engenharia de Controle Moderno OGATA 4ª. edição
17 Espaço de estado Consiste em n equações diferenciais de primeira ordem que são apresentadas utilizando uma notação com matrizes e vetores. Estado: o estado de um sistema dinâmico é o menor conjunto de variáveis (chamadas de variáveis de estado x1(t), x2(t),...,xn(t) ), tais que o conhecimento destas variáveis no instante inicial (t=0), juntamente com o conhecimento do sinal de entrada para t > t0 é suficiente para determinar completamente o comportamento dinâmico do sistemas para t > t0. Usa o domínio do tempo; Quaisquer condições iniciais; Aplicabilidade mais ampla: sistemas lineares e não-lineares; sistemas invariantes no tempo e variantes no tempo; sistemas SISO (Single Input, Single Output) e MIMO (Multiple Inputs, Multiple Outputs) Interpretação física mais abstrata.

18 Espaço de estado Suponha que escolhemos i(t) e Vc(t) como as variáveis de estado. Então as equações que descrevem a dinâmica do sistema são: Existem infinitas representações por variáveis de estado para um determinado sistema dinâmico.
19 Espaço de estado
20 Espaço de estado Função de Transferência: Relação da Transformada de Laplace de saída com a transformada de laplace da entrada. Considerando as condições iniciais nulas, x(0) igual a zero.
21 Espaço de estado
22 Espaço de estado Linearização
23 Espaço de estado Linearização Exemplo: Pêndulo simples
Conceitos de sistemas e introdução à modelagem
 Instrumentação e Controle Aula 2 Conceitos de sistemas e introdução à modelagem Prof. Renato Watanabe ESTO004-17 Sistema Um sistema pode ser visto como um processo que transforma um sinal em outro. Portanto,
Instrumentação e Controle Aula 2 Conceitos de sistemas e introdução à modelagem Prof. Renato Watanabe ESTO004-17 Sistema Um sistema pode ser visto como um processo que transforma um sinal em outro. Portanto,
Transformadas de Laplace Engenharia Mecânica - FAENG. Prof. Josemar dos Santos
 Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
EES-20: Sistemas de Controle II. 31 Julho 2017
 EES-20: Sistemas de Controle II 31 Julho 2017 1 / 41 Folha de informações sobre o curso 2 / 41 O que é Controle? Controlar: Atuar sobre um sistema físico de modo a obter um comportamento desejado. 3 /
EES-20: Sistemas de Controle II 31 Julho 2017 1 / 41 Folha de informações sobre o curso 2 / 41 O que é Controle? Controlar: Atuar sobre um sistema físico de modo a obter um comportamento desejado. 3 /
Capítulo 2 Dinâmica de Sistemas Lineares
 Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Representação e Análise de Sistemas Dinâmicos Lineares Componentes Básicos de um Sistema de Controle
 Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Modelagem Matemática de Sistemas
 Modelagem Matemática de Sistemas 1. Descrição Matemática de Sistemas 2. Descrição Entrada-Saída 3. Exemplos pag.1 Teoria de Sistemas Lineares Aula 3 Descrição Matemática de Sistemas u(t) Sistema y(t) Para
Modelagem Matemática de Sistemas 1. Descrição Matemática de Sistemas 2. Descrição Entrada-Saída 3. Exemplos pag.1 Teoria de Sistemas Lineares Aula 3 Descrição Matemática de Sistemas u(t) Sistema y(t) Para
Modelos Matematicos de Sistemas
 Modelos Matematicos de Sistemas Introdução; Equações Diferenciais de Sistemas Físicos; Aproximações Lineares de Sistemas Físicos; Transformada de Laplace; Função de Transferência de Sistemas Lineares;
Modelos Matematicos de Sistemas Introdução; Equações Diferenciais de Sistemas Físicos; Aproximações Lineares de Sistemas Físicos; Transformada de Laplace; Função de Transferência de Sistemas Lineares;
Indice Introdução Sistemas contínuos descritos por equações diferenciais lineares de coeficientes constantes... 75
 , Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
, Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
Controle e Sistemas Não lineares
 Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
Aula 04 Representação de Sistemas
 Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
A Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
Fundamentos de Controle
 Fundamentos de Controle Modelagem matemática de sistemas de controle Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui
Fundamentos de Controle Modelagem matemática de sistemas de controle Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui
II. REVISÃO DE FUNDAMENTOS
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS CURSO DE ENGENHARIA DA COMPUTAÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS CURSO DE ENGENHARIA DA COMPUTAÇÃO O que veremos na aula de hoje Transformadas Direta e Inversa de Laplace Técnicas de Frações Parciais
UNIVERSIDADE ESTADUAL DO MARANHÃO CENTRO DE CIÊNCIAS TECNOLÓGICAS CURSO DE ENGENHARIA DA COMPUTAÇÃO O que veremos na aula de hoje Transformadas Direta e Inversa de Laplace Técnicas de Frações Parciais
Conteúdo. Definições básicas;
 Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
1ā lista de exercícios de Sistemas de Controle II
 ā lista de exercícios de Sistemas de Controle II Obtenha uma representação em espaço de estados para o sistema da figura R(s) + E(s) s + z U(s) K Y (s) s + p s(s + a) Figura : Diagrama de blocos do exercício
ā lista de exercícios de Sistemas de Controle II Obtenha uma representação em espaço de estados para o sistema da figura R(s) + E(s) s + z U(s) K Y (s) s + p s(s + a) Figura : Diagrama de blocos do exercício
Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
SISTEMAS REALIMENTADOS
 SISTEMAS REALIMENTADOS Prof.: Helder Roberto de O. Rocha Engenheiro Eletricista Doutorado em Computação Representação no Espaço de Estados É apropriada para sistemas que possuem várias entradas e várias
SISTEMAS REALIMENTADOS Prof.: Helder Roberto de O. Rocha Engenheiro Eletricista Doutorado em Computação Representação no Espaço de Estados É apropriada para sistemas que possuem várias entradas e várias
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap2 - Modelagem no Domínio de Frequência Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap2 - Modelagem no Domínio de Frequência Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos
Parte I O teste tem uma parte de resposta múltipla (Parte I) e uma parte de resolução livre (Parte II)
 e uma parte de resolução livre (Parte II)") Instituto Superior Técnico Sinais e Sistemas o teste 4 de Novembro de 0 Nome: Número: Duração da prova: horas Parte I O teste tem uma parte de resposta múltipla (Parte I) e uma parte de resolução livre
Instituto Superior Técnico Sinais e Sistemas o teste 4 de Novembro de 0 Nome: Número: Duração da prova: horas Parte I O teste tem uma parte de resposta múltipla (Parte I) e uma parte de resolução livre
Análise de Laplace. Prof. André E. Lazzaretti
 Análise de Laplace Prof. André E. Lazzaretti lazzaretti@utfpr.edu.br Introdução Objetivo principal: resolução de equações diferenciais; Similar à análise fasorial: transformação para o domínio da frequência;
Análise de Laplace Prof. André E. Lazzaretti lazzaretti@utfpr.edu.br Introdução Objetivo principal: resolução de equações diferenciais; Similar à análise fasorial: transformação para o domínio da frequência;
SCILAB: MÓDULO 4 SISTEMAS E CONTROLE
 SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab 5.3.3 Dr.ª Eng.ª Mariana Santos Matos Cavalca O que é controlar? Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios)
SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab 5.3.3 Dr.ª Eng.ª Mariana Santos Matos Cavalca O que é controlar? Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios)
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Estabilidade. Samir A. M. Martins 1. Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG
 Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
 PETROBRAS ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELETRÔNICA ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELÉTRICA ENGENHEIRO(A) JÚNIOR - ÁREA: AUTOMAÇÃO CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
PETROBRAS ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELETRÔNICA ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELÉTRICA ENGENHEIRO(A) JÚNIOR - ÁREA: AUTOMAÇÃO CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
 Função de Transferência Relação Entrada-Saída Desejamos obter a expressão M(s) = Y(s) R(s) Para obter essa expressão, devemos realizar uma analise de algebra de blocos. Perceba que a relação entre o sinal
Função de Transferência Relação Entrada-Saída Desejamos obter a expressão M(s) = Y(s) R(s) Para obter essa expressão, devemos realizar uma analise de algebra de blocos. Perceba que a relação entre o sinal
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
 Função de Transferência Relação Entrada-Saída Desejamos obter a expressão M(s) = Y(s) R(s) Para obter essa expressão, devemos realizar uma analise de algebra de blocos. Perceba que a relação entre o sinal
Função de Transferência Relação Entrada-Saída Desejamos obter a expressão M(s) = Y(s) R(s) Para obter essa expressão, devemos realizar uma analise de algebra de blocos. Perceba que a relação entre o sinal
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
X. MÉTODOS DE ESPAÇO DE ESTADOS
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE X. MÉTODOS DE ESPAÇO DE ESTADOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE X. MÉTODOS DE ESPAÇO DE ESTADOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Modelagem de Sistemas de Controle por Espaço de Estados
 Modelagem de Sistemas de Controle por Espaço de Estados A modelagem por espaço de estados possui diversas vantagens. Introduz a teoria conhecida como Controle Moderno ; Adequada para sistemas de múltiplas
Modelagem de Sistemas de Controle por Espaço de Estados A modelagem por espaço de estados possui diversas vantagens. Introduz a teoria conhecida como Controle Moderno ; Adequada para sistemas de múltiplas
Controle e Servomecanismos I
 Controle e Servomecanismos I Introdução Sistemas de controle com e sem retroalimentação São de enorme importância científica, tecnológica e econômica com aplicações em Telecom, transportes, navegação,
Controle e Servomecanismos I Introdução Sistemas de controle com e sem retroalimentação São de enorme importância científica, tecnológica e econômica com aplicações em Telecom, transportes, navegação,
DESCRIÇÃO MATEMÁTICA DE SISTEMAS PARTE 1
 DESRIÇÃO MATEMÁTIA DE SISTEMAS PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Agenda Modelagem de sistemas dinâmicos Descrição Entrada-Saída
DESRIÇÃO MATEMÁTIA DE SISTEMAS PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Agenda Modelagem de sistemas dinâmicos Descrição Entrada-Saída
1 Controlabilidade, observabilidade e estabilidade de sistemas em tempo contínuo
 Rio de Janeiro, 24 de março de 2006. 1 a Lista de Exercícios de Controle e Servomecanismos II Tópicos: autovalores, estabilidade, controlabilidade, observabilidade, realimentação de estado e observadores
Rio de Janeiro, 24 de março de 2006. 1 a Lista de Exercícios de Controle e Servomecanismos II Tópicos: autovalores, estabilidade, controlabilidade, observabilidade, realimentação de estado e observadores
Capítulo 2: Modelos Matemáticos de Sistemas -Sinais e Sistemas 1 -
 Modelos Matemáticos de Sistemas -Sinais e Sistemas 1 - Objetivos Sinais Sistemas 1 Sistemas Eletro Entender o que significa fisicamente e matematicamente a transformada de Laplace Encontrar a transformada
Modelos Matemáticos de Sistemas -Sinais e Sistemas 1 - Objetivos Sinais Sistemas 1 Sistemas Eletro Entender o que significa fisicamente e matematicamente a transformada de Laplace Encontrar a transformada
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Capítulo 0: Apresentação da disciplina de Sinais e Sistemas 1
 Apresentação da de Sinais e Sistemas 1 Docente Sinais Sistemas 1 Alan Petrônio Pinheiro Contato: alan@elétrica.ufu.br Horário atendimento e local quartas-feiras: 09:00 às 10:30 e 16:40 às 18:20 Local:
Apresentação da de Sinais e Sistemas 1 Docente Sinais Sistemas 1 Alan Petrônio Pinheiro Contato: alan@elétrica.ufu.br Horário atendimento e local quartas-feiras: 09:00 às 10:30 e 16:40 às 18:20 Local:
Estabilidade. 1. Estabilidade Entrada-Saída Sistemas LIT. 2. Estabilidade BIBO Sistemas LIT. 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT
 Estabilidade 1. Estabilidade Entrada-Saída Sistemas LIT 2. Estabilidade BIBO Sistemas LIT 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT 4. Sistemas Discretos LIT 5. Estabilidade BIBO Sistemas
Estabilidade 1. Estabilidade Entrada-Saída Sistemas LIT 2. Estabilidade BIBO Sistemas LIT 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT 4. Sistemas Discretos LIT 5. Estabilidade BIBO Sistemas
Sumário. CAPÍTULO 1 Introdução 1. CAPÍTULO 2 Terminologia dos Sistemas de Controle 14
 Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
5 Descrição entrada-saída
 Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Sistemas lineares. Aula 7 Transformada Inversa de Laplace
 Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap3 Modelagem no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap3 Modelagem no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Análise Dinâmica de Sistemas Mecânicos e Controle
 Análise Dinâmica de Sistemas Mecânicos e Controle Unidade 2 Representação de sistemas Através de Diagramas e Espaço de Estados Prof. Thiago da Silva Castro thiago.castro@ifsudestemg.edu.br 1. Representação
Análise Dinâmica de Sistemas Mecânicos e Controle Unidade 2 Representação de sistemas Através de Diagramas e Espaço de Estados Prof. Thiago da Silva Castro thiago.castro@ifsudestemg.edu.br 1. Representação
SISTEMAS DE CONTROLE SIC
 SISTEMAS DE CONTROLE SIC Parte 1 Modelagem de Sistemas Dinâmicos Professor Dr. Michael Klug 1 Introdução MODELOS No estudo de sistemas de controle devemos ser capazes de obter uma representação matemática
SISTEMAS DE CONTROLE SIC Parte 1 Modelagem de Sistemas Dinâmicos Professor Dr. Michael Klug 1 Introdução MODELOS No estudo de sistemas de controle devemos ser capazes de obter uma representação matemática
1 Modelagem de Sistemas Lineares baseados em Circuitos
 Universidade Federal do io de Janeiro Departamento de Engenharia Eletrônica e de omputação 5/ Lista Data de Expedição: 7//5 Limite de Tempo: Semana Data de Entrega: //5 Tabela de Pontos (favor não preencher)
Universidade Federal do io de Janeiro Departamento de Engenharia Eletrônica e de omputação 5/ Lista Data de Expedição: 7//5 Limite de Tempo: Semana Data de Entrega: //5 Tabela de Pontos (favor não preencher)
Introdução aos Circuitos Elétricos
 Introdução aos Circuitos Elétricos A Transformada de Laplace Prof. Roberto Alves Braga Jr. Prof. Bruno Henrique Groenner Barbosa UFLA - Departamento de Engenharia A Transformada de Laplace História Pierri
Introdução aos Circuitos Elétricos A Transformada de Laplace Prof. Roberto Alves Braga Jr. Prof. Bruno Henrique Groenner Barbosa UFLA - Departamento de Engenharia A Transformada de Laplace História Pierri
PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA
 DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero
DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero
Analise sistemas LCIT usando a Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Funções de Transferência Funções de Transferência A Função de Transferência é definida como a relação da Transformada de
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Funções de Transferência Funções de Transferência A Função de Transferência é definida como a relação da Transformada de
Aula 6. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 6 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Março de 2012. Resumo 1 Introdução Espaço
Aula 6 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Março de 2012. Resumo 1 Introdução Espaço
Modelagem no Domínio do Tempo
 CAPÍTULO TRÊS Modelagem no Domínio do Tempo SOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO Controle de Antena: Representação no Espaço de Estados Para o amplificador de potência, E s a() V () s 150. Usando a
CAPÍTULO TRÊS Modelagem no Domínio do Tempo SOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO Controle de Antena: Representação no Espaço de Estados Para o amplificador de potência, E s a() V () s 150. Usando a
Comecemos escrevendo a forma geral de uma equação diferencial de ordem n, 1 inear e invariante no tempo, , b i
 3 6 ADL aula 2 Função de Transferência Comecemos escrevendo a forma geral de uma equação diferencial de ordem n, 1 inear e invariante no tempo, onde c(t) é a saída, r(t) é a entrada e os a i, b i e a forma
3 6 ADL aula 2 Função de Transferência Comecemos escrevendo a forma geral de uma equação diferencial de ordem n, 1 inear e invariante no tempo, onde c(t) é a saída, r(t) é a entrada e os a i, b i e a forma
Aula 6 Transformada de Laplace
 Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap3 Modelagem no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap3 Modelagem no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
4.1 Pólos, Zeros e Resposta do Sistema
 ADL17 4.1 Pólos, Zeros e Resposta do Sistema A resposta de saída de um sistema é a soma de duas respostas: a resposta forçada e a resposta natural. Embora diversas técnicas, como a solução de equações
ADL17 4.1 Pólos, Zeros e Resposta do Sistema A resposta de saída de um sistema é a soma de duas respostas: a resposta forçada e a resposta natural. Embora diversas técnicas, como a solução de equações
Questões para Revisão Controle
 Questões para Revisão Controle 1. (PROVÃO-1999)A Figura 1 apresenta o diagrama de blocos de um sistema de controle, e a Figura 2, o seu lugar das raízes para K > 0. Com base nas duas figuras, resolva os
Questões para Revisão Controle 1. (PROVÃO-1999)A Figura 1 apresenta o diagrama de blocos de um sistema de controle, e a Figura 2, o seu lugar das raízes para K > 0. Com base nas duas figuras, resolva os
Descrição de Sistemas LTI por Variáveis de Estados 1
 Descrição de Sistemas LTI por Variáveis de Estado Os estados de um sistema podem ser definidos como o conjunto mínimo de sinais que descrevem o comportamento dinâmico do sistema. Sendo assim, dado o valor
Descrição de Sistemas LTI por Variáveis de Estado Os estados de um sistema podem ser definidos como o conjunto mínimo de sinais que descrevem o comportamento dinâmico do sistema. Sendo assim, dado o valor
Indice. Resposta forçada (condições iniciais nulas)
") Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Modelagem Matemática de Sistemas
 Modelagem Matemática de Sistemas 1. de modelagem com Circuitos Elétricos 2. Sistemática para Obtenção de Equações de Estado pag.1 Teoria de Sistemas Lineares Aula 4 Descrição Matemática de Sistemas Exemplo
Modelagem Matemática de Sistemas 1. de modelagem com Circuitos Elétricos 2. Sistemática para Obtenção de Equações de Estado pag.1 Teoria de Sistemas Lineares Aula 4 Descrição Matemática de Sistemas Exemplo
S I N A I S & S I S T E M A S PLANEJAMENTO
 S I N A I S & S I S T E M A S PLANEJAMENTO 2017.1 contatos importantes: Professor: Gustavo Castro do Amaral e-mail gustavo@opto.cetuc.puc-rio.br website www.labopto.com Monitor: David Stolnicki e-mail
S I N A I S & S I S T E M A S PLANEJAMENTO 2017.1 contatos importantes: Professor: Gustavo Castro do Amaral e-mail gustavo@opto.cetuc.puc-rio.br website www.labopto.com Monitor: David Stolnicki e-mail
Sistemas e Sinais (LEE & LETI)
") Sistemas e Sinais (LEE & LETI) o teste - de Julho de 05 Duração da prova: hora e 30 minutos Atenção:. Identique todas as folhas.. O teste é constituído por questões de escolha múltipla e por questões de
Sistemas e Sinais (LEE & LETI) o teste - de Julho de 05 Duração da prova: hora e 30 minutos Atenção:. Identique todas as folhas.. O teste é constituído por questões de escolha múltipla e por questões de
Representação De Modelos de Sistemas Dinâmicos:
 Representação de Modelos de Sisteas Dinâicos: Equação I/O; Função de Transferência 03 Representação De Modelos de Sisteas Dinâicos: - Equação Input-Output (I/O) - Função de Transferência INTRODUÇÃO Vereos,
Representação de Modelos de Sisteas Dinâicos: Equação I/O; Função de Transferência 03 Representação De Modelos de Sisteas Dinâicos: - Equação Input-Output (I/O) - Função de Transferência INTRODUÇÃO Vereos,
Controle: é o ato de comandar, dirigir, ordenar, manipular alguma coisa ou alguém.
 DEFINIÇÕES Sistema: é um conjunto de componentes que atuam conjuntamente e realizam um certo objetivo. Assim um sistema é um arranjo de partes ou componentes, sem limitações de quantidade ou qualidade.
DEFINIÇÕES Sistema: é um conjunto de componentes que atuam conjuntamente e realizam um certo objetivo. Assim um sistema é um arranjo de partes ou componentes, sem limitações de quantidade ou qualidade.
Sistemas Dinâmicos Lineares
 Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Aula 3. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Departamento de Engenharia Química e de Petróleo UFF. Outros Processos de Separação. Sistemas de Controle Multivariáveis: Uma Introdução
 Departamento de Engenharia Química e de Petróleo FF custo Outros Processos de Separação Sistemas de Controle Multivariáveis: ma Introdução Prof a Ninoska Bojorge Controle de Processos Multivariáveis Controle
Departamento de Engenharia Química e de Petróleo FF custo Outros Processos de Separação Sistemas de Controle Multivariáveis: ma Introdução Prof a Ninoska Bojorge Controle de Processos Multivariáveis Controle
Sistemas lineares. Aula 6 Transformada de Laplace
 Sistemas lineares Aula 6 Transformada de Laplace Introdução Transformada de Laplace Convergência da transformada de laplace Exemplos Região de Convergência Introdução Transformações matemáticas: Logaritmo:
Sistemas lineares Aula 6 Transformada de Laplace Introdução Transformada de Laplace Convergência da transformada de laplace Exemplos Região de Convergência Introdução Transformações matemáticas: Logaritmo:
UNIVERSIDADE DO ALGARVE
 UNIVERSIDADE DO ALGARVE FACULDADE DE CIÊNCIAS E TECNOLOGIA Departamento de Engenharia Electrónica e Informática SISTEMAS DE CONTROLO Problemas Ano lectivo de 20062007 Licenciatura em Engenharia de Sistemas
UNIVERSIDADE DO ALGARVE FACULDADE DE CIÊNCIAS E TECNOLOGIA Departamento de Engenharia Electrónica e Informática SISTEMAS DE CONTROLO Problemas Ano lectivo de 20062007 Licenciatura em Engenharia de Sistemas
SC1 Sistemas de Controle 1. Cap. 2 - Estabilidade Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 2 - Estabilidade Prof. Tiago S Vítor Sumário 1. Introdução 2. Critério de Routh-Hurwitz 3. Critério de Routh-Hurwitz: Casos Especiais 4. Projeto de Estabilidade via Routh-Hurwitz
SC1 Sistemas de Controle 1 Cap. 2 - Estabilidade Prof. Tiago S Vítor Sumário 1. Introdução 2. Critério de Routh-Hurwitz 3. Critério de Routh-Hurwitz: Casos Especiais 4. Projeto de Estabilidade via Routh-Hurwitz
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Filipe Fraga Sistemas de Controle 1 4. Resposta no Domínio do Tempo 4.1 Introdução
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Filipe Fraga Sistemas de Controle 1 4. Resposta no Domínio do Tempo 4.1 Introdução
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
Sistemas lineares. Aula 3 Sistemas Lineares Invariantes no Tempo
 Sistemas lineares Aula 3 Sistemas Lineares Invariantes no Tempo SLIT Introdução Resposta de um SLIT Resposta de Entrada Nula Resposta de Estado Nulo Resposta ao Impulso Unitária Introdução Sistemas: Modelo
Sistemas lineares Aula 3 Sistemas Lineares Invariantes no Tempo SLIT Introdução Resposta de um SLIT Resposta de Entrada Nula Resposta de Estado Nulo Resposta ao Impulso Unitária Introdução Sistemas: Modelo
LISTAS DE EXERCÍCIOS PTC Controle Linear Multivariável (Pós-Graduação) Prof. Paulo Sérgio Pereira da Silva
 Prof. Paulo Sérgio Pereira da Silva") LISTAS DE EXERCÍCIOS PTC - 5746 Controle Linear Multivariável Pós-Graduação Prof. Paulo Sérgio Pereira da Silva 27 ạ Lista de Exercícios Algebra Linear Controle Multivariável PTC 5746 Prof. Paulo Sérgio
LISTAS DE EXERCÍCIOS PTC - 5746 Controle Linear Multivariável Pós-Graduação Prof. Paulo Sérgio Pereira da Silva 27 ạ Lista de Exercícios Algebra Linear Controle Multivariável PTC 5746 Prof. Paulo Sérgio
SUMÁRIO BACKGROUND. Referências 62 MATLAB Seção B: Operações Elementares 62 Problemas 71
 SUMÁRIO BACKGROUND B.l Números Complexos 17 B.l-l Nota Histórica 17 B.I-2 Álgebra de Números Complexos 20 B.2 Senóides 30 B.2-1 Adição de Senóides 31 B.2-2 Senóides em Termos de Exponenciais: A Fórmula
SUMÁRIO BACKGROUND B.l Números Complexos 17 B.l-l Nota Histórica 17 B.I-2 Álgebra de Números Complexos 20 B.2 Senóides 30 B.2-1 Adição de Senóides 31 B.2-2 Senóides em Termos de Exponenciais: A Fórmula
Sistemas de Controle
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle Resumo Espaço dos Estados Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle Prof. Dr. Marcos Lajovic Carneiro Resumo
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle Resumo Espaço dos Estados Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle Prof. Dr. Marcos Lajovic Carneiro Resumo
Sistemas de Controle
 Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
REPRESENTAÇÃO DE SISTEMAS DINÂMICOS NA FORMA DO ESPAÇO DOS ESTADOS
 REPRESENTAÇÃO DE SISTEMAS DINÂMICOS NA FORMA DO ESPAÇO DOS ESTADOS. Espaço dos estados Representação da dinâmica de um sistema de ordem n usando n equações diferenciais de primeira ordem. Sistema é escrito
REPRESENTAÇÃO DE SISTEMAS DINÂMICOS NA FORMA DO ESPAÇO DOS ESTADOS. Espaço dos estados Representação da dinâmica de um sistema de ordem n usando n equações diferenciais de primeira ordem. Sistema é escrito
O Papel dos Pólos e Zeros
 Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Controle de Sistemas Dinâmicos. Informações básicas
 Controle de Sistemas Dinâmicos Informações básicas Endereço com material http://sites.google.com/site/disciplinasrgvm/ Ementa Modelagem de Sistemas de Controle; Sistemas em Malha Aberta e em Malha Fechada;
Controle de Sistemas Dinâmicos Informações básicas Endereço com material http://sites.google.com/site/disciplinasrgvm/ Ementa Modelagem de Sistemas de Controle; Sistemas em Malha Aberta e em Malha Fechada;
ANÁLISE DE SISTEMAS LINEARES NO ESPAÇO DE ESTADOS
 AE- ANÁLISE DE SISTEMAS LINEARES NO ESPAÇO DE ESTADOS AE- Determine os valores e vectores próprios de a) A= -.5.5 -.5 b) B= - - AE- Forma canónica controlável. a) Mostre que a equação diferencial homogénea
AE- ANÁLISE DE SISTEMAS LINEARES NO ESPAÇO DE ESTADOS AE- Determine os valores e vectores próprios de a) A= -.5.5 -.5 b) B= - - AE- Forma canónica controlável. a) Mostre que a equação diferencial homogénea
Controle de Processos
 17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 217 E. S. Tognetti (UnB) Controle
17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 217 E. S. Tognetti (UnB) Controle
Erro em regime permanente em sistema de controle com
 Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Controle utilizando variáveis de estado - v1.1
 2 ontrole utilizando variáveis de estado - v. 2. Objetivo O objetivo desta experiência é, utilizando o enfoque de espaço de estados, projetar e implementar um controlador digital para uma planta simples
2 ontrole utilizando variáveis de estado - v. 2. Objetivo O objetivo desta experiência é, utilizando o enfoque de espaço de estados, projetar e implementar um controlador digital para uma planta simples
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química 2014/1
 Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 8: Sistemas de Primeira Ordem (Continuação): Sistema Lead-Lag; Sistemas
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 8: Sistemas de Primeira Ordem (Continuação): Sistema Lead-Lag; Sistemas
Sistemas a Tempo Discreto
 Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Controle II. Márcio J. Lacerda. 2 o Semestre Departamento de Engenharia Elétrica Universidade Federal de São João del-rei
 Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Modelagem Matemática de Sistemas Dinâmicos
 Modelagem Matemática de Sistemas Dinâmicos 3.1 INTRODUÇÃO No estudo de sistemas de controle, o leitor deve ser capaz de modelar sistemas dinâmicos e analisar características dinâmicas. O modelo matemático
Modelagem Matemática de Sistemas Dinâmicos 3.1 INTRODUÇÃO No estudo de sistemas de controle, o leitor deve ser capaz de modelar sistemas dinâmicos e analisar características dinâmicas. O modelo matemático
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
ELT062 - OFICINA DE SIMULAÇÃO ANALÓGICA E DIGITAL EM CONTROLE LINEARIZAÇÃO DE SISTEMAS
 ELT062 - OFICINA DE SIMULAÇÃO ANALÓGICA E DIGITAL EM CONTROLE LINEARIZAÇÃO DE SISTEMAS 1. INTRODUÇÃO Sistemas dinâmicos lineares são aqueles que obedecem ao princípio da superposição, isto é, um sistema
ELT062 - OFICINA DE SIMULAÇÃO ANALÓGICA E DIGITAL EM CONTROLE LINEARIZAÇÃO DE SISTEMAS 1. INTRODUÇÃO Sistemas dinâmicos lineares são aqueles que obedecem ao princípio da superposição, isto é, um sistema
1. Diagrama de Blocos. 2. Gráfico de fluxo de sinais. Representação e Análise de Sistemas Dinâmicos Lineares
 Representação e Análise de Sistemas Dinâmicos Lineares 1. Diagrama de Blocos 2. Gráfico de fluxo de sinais Fernando de Oliveira Souza pag.1 Engenharia de Controle Aula 3 Diagrama de Blocos U(s) G(s) Y
Representação e Análise de Sistemas Dinâmicos Lineares 1. Diagrama de Blocos 2. Gráfico de fluxo de sinais Fernando de Oliveira Souza pag.1 Engenharia de Controle Aula 3 Diagrama de Blocos U(s) G(s) Y
5. DESENVOLVIMENTO Modelagem prática do motor CC
 1 1. RESUMO Neste trabalho, de vertente científica e tecnológica, estuda-se e modela um motor de corrente contínua (CC) pelo método de modelagem experimental de Hägglund e utiliza uma nova proposta de
1 1. RESUMO Neste trabalho, de vertente científica e tecnológica, estuda-se e modela um motor de corrente contínua (CC) pelo método de modelagem experimental de Hägglund e utiliza uma nova proposta de
Sinais e Sistemas Exame Data: 11/6/2018. Duração: 3 horas
 Sinais e Sistemas Exame Data: /6/. Duração: 3 horas Número: Nome: Identique este enunciado e a folha de respostas com o seu número e os seus primeiro e último nomes. Para as questões a, indique as suas
Sinais e Sistemas Exame Data: /6/. Duração: 3 horas Número: Nome: Identique este enunciado e a folha de respostas com o seu número e os seus primeiro e último nomes. Para as questões a, indique as suas
TRANSFORMADA DE LAPLACE E OPERADORES LINEARES
 TRANSFORMADA DE LAPLACE E OPERADORES LINEARES O DOMÍNIO DE LAPLACE Usualmente trabalhamos com situações que variam no tempo (t), ou seja, trabalhamos no domínio do tempo. O domínio de Laplace é um domínio
TRANSFORMADA DE LAPLACE E OPERADORES LINEARES O DOMÍNIO DE LAPLACE Usualmente trabalhamos com situações que variam no tempo (t), ou seja, trabalhamos no domínio do tempo. O domínio de Laplace é um domínio