Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
|
|
|
- Agustina Domingos Coradelli
- 6 Há anos
- Visualizações:
Transcrição

1 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira
2 Transformações 2D Posicionar, orientar e escalar objectos no plano XOY Transformações básicas Translação Rotação relativamente à origem Mudança de escala relativamente à origem Representação matricial Coordenadas homogénas Transformações mais complexas Decompor numa sequência de transformações básicas 2
 em diferentes zonas do")
3 Visualização 2D É preciso usar transformações 2D para mostrar diferentes cenas (ou partes de cenas) em diferentes zonas do ecrã 3

4 Visualização 2D 4
5 Transformações 2D básicas p = (x, y) ponto original p = (x, y ) ponto transformado As transformações básicas são: - Translação - Mudança de escala - Rotação Notação vectorial Nota: alguns livros e packages gráficos mais antigos usam uma notação em que cada ponto é um vector linha e não um vector coluna: P = [ x y ] 5
6 Translação Para fazer uma translação é necessário especificar deslocamentos em x e y 6
7 Translação A translação desloca um objecto sem o deformar: é uma transformação de corpo-rígido Para aplicar uma translação a um segmento de recta, transformam-se os extremos e unem-se os pontos transformados Para aplicar uma translação a um polígono, transformam-se os vértices 7
8 Rotação Para efectuar uma rotação é necessário especificar: - um ponto em torno do qual se vai efectuar a rotação (x r,y r ) ( intersecção entre o eixo de rotação e o plano XOY ) - um ângulo de rotação θ (positivo no sentido anti-horário) Rotação positiva 8
9 Rotação em torno da origem Por facilidade, calculemos em 1º lugar a matriz de transformação correspondente a uma rotação em torno da origem: x = r cos (Φ + θ) = r cos Φ cos θ r sin Φ sin θ y = r sin (Φ + θ) = r cos Φ sin θ + r sin Φ cos θ As coordenadas originais do ponto em coordenadas polares são: r sin (Φ + θ) x = r cos Φ y = r sin Φ Substituindo nas expressões anteriores temos: x = x cos θ y sin θ r cos (Φ + θ) y = x sin θ + y cos θ 9



10 Rotação em torno da origem Nota: quando se usa a notação em que cada ponto é uma matriz linha, altera-se a ordem da multiplicação de matrizes e as matrizes de transformação são as transpostas: P = P. R T com TPC: verificar Matriz de rotação de um ângulo θ em torno da origem 10
11 Rotação em torno de um ponto arbitrário Usando a relação trigonométrica indicada pelos dois triângulos da figura podemos generalizar a expressão das coordenadas x,y Nota: um método alternativo x = x r + ( x - x r ) cos θ ( y - y r ) sin θ consiste em considerar esta transformação como composta de transformações elementares y = y r + ( x - x r ) sin θ + ( y - y r ) cos θ (ver mais à frente) As rotações são também transformações de corpo rígido Tal como na translação, para rodar um segmento de recta, transformam-se os extremos e unem-se os pontos transformados Para rodar um polígono, transformam-se os vértices 11
12 Nota: Obtenção do valor de x x = r cos (θ + Φ) + x r x = r cos Φ + x r y = r sen (θ + Φ) + y r y = r sen Φ + y r x = r cos θ cos Φ r sen θ sen Φ + x r y = r cos θ sen Φ + r sen θ cos Φ + y r exprimindo em função de x e y: x = (x x r ) cos θ (y - y r ) sen θ + x r x = x r + ( x - x r ) cos θ ( y - y r ) sin θ TPC: obter o valor de y 12
13 Mudança de escala em torno da origem Para modificar o tamanho de um objecto aplica-se uma mudança de escala, sendo s x e s y factores de escala: x = x. s x y = y. s y matriz de transformação P = S. P Transformação de um quadrado num quadrado maior através de uma mudança de escala, s x =2, s y =2 13
14 Mudança de escala Podem-se usar valores de s >0 Transformação de um quadrado num quadrado maior através de uma mudança de escala, s x =2, s y =2 x = x. s x y = y. s y s x = s y mudança de escala uniforme s x = s y mudança de escala não uniforme Transformação de um quadrado num rectângulo através de uma mudança de escala, s x =2, s y =1 14
15 Mudança de escala Os objectos transformados pela transformação S são também reposicionados: s < 1 objecto aproxima-se da origem s > 1 objecto afasta-se da origem Um segmento de recta diminui em tamanho e aproxima-se da origem quando se aplica uma mudança de escala s x = s y = 0,5 TPC: verificar 15
16 Mudança de escala com um ponto fixo Mas podemos controlar a posição de um objecto, escolhendo um ponto fixo, (x f, y f ) que permanece inalterado: x x f = (x x f ). s x y y f = (y y f ). s y Mudança de escala relativa a um ponto fixo (x f, y f ) x = x. s x + x f (1 s x ) y = y. s y + y f (1 s y ) Const. para todos os pontos do objecto Nota: é possível realizar esta transformação e a rotação em torno de um ponto arbitrário na forma matricial multiplicando cada ponto apenas por uma matriz como veremos mais à frente 16
17 Coordenadas homogéneas A maioria das aplicações gráficas envolvem sequências de transformações Por exemplo: - as transformações de visualização envolvem sequências de translações e rotações para gerar uma imagem de uma cena - uma animação pode requerer que um objecto sofra uma translação e uma rotação entre cada dois frames consecutivos Vejamos como se podem representar as transformações anteriores para que se possam realizar sequências de transformações de forma eficiente 17
18 Vimos que as três transformações básicas 2D podem ser expressas na forma geral: P = M 1. P + M 2 M 1 é uma matriz 2x2 contendo factores multiplicativos M 2 é uma matriz coluna com dois elementos: os dois termos de translação Uma abordagem mais eficiente consiste em ter uma única matriz que: - represente todas as transformações de uma sequência - possa ser aplicada uma única vez a cada ponto Isto consegue-se usando coordenadas homogéneas 18
19 É possível combinar numa única matriz os termos multiplicativos e os aditivos se utilizarmos matrizes de 3x3 Todas as transformações podem ser representadas por multiplicações de matrizes Podemos usar a terceira coluna para os termos aditivos É necessário passar a representar cada ponto por três coordenadas: ( x, y ) (x h, y h, h), h = 0 x = x h / h y = y h / h ( x.h, y.h, h) 19
")
20 Uma escolha que facilita é: plano h =1 O que resulta em: ( x, y ) (x, y, 1) Existe uma infinidade de pontos P h no espaço tridimensional das coordenadas homogéneas que correspondem a um único ponto (x,y) 20
21 Transformações 2D em coordenadas homogéneas Quando se usam coordenadas homogéneas podemos realizar todas as transformações geométricas por multiplicação de matrizes Translação 2D: TPC: verificar 21
22 Rotação 2D: Mudança de escala 2D: 22
23 Transformações inversas A transformação inversa de uma translação: é uma translação com parâmetros simétricos em x e y: 23
24 Uma rotação inversa obtém-se substituindo o ângulo de rotação pelo seu simétrico: Podemos calcular a inversa de qualquer matriz de rotação calculando a transposta; Isto deve-se ao facto de apenas o seno ser afectado pela mudança de sinal do ângulo TPC: verificar 24
25 Uma mudança de escala inversa obtém-se substituindo os factores de escala pelos seus recíprocos: Mudança de escala s x =2, s y =1 O produto de uma qualquer matriz M correspondente a uma transformação pela matriz correspondente à sua transformação inversa produz uma matriz identidade: M. M -1 = I Mudança de escala s x =1/2, s y =1 25
26 Transformações compostas Usando a representação matricial podemos gerar uma matriz correspondente a uma sequência de transformações calculando o produto das transformações individuais O produto de matrizes de transformação chama-se concatenação ou composição de matrizes A concatenação de duas matrizes calcula-se como: Segunda transformação a ser aplicada P = M 2. M 1. P = M. P Primeira transformação a ser aplicada Nota: A aplicação das matrizes de transformação faz-se multiplicando da direita para a esquerda (nesta notação) As coordenadas do ponto transformado P são calculadas através da multiplicação de uma única matriz 26
27 Composição de duas translações sucessivas TPC: verificar 27
28 Composição de duas mudanças de escala sucessivas 28
29 Rotação em torno de um ponto arbitrário (x r, y r ) Posição original do objecto e do ponto (x r, y r ) 1- Aplicar a translação que leva (x r, y r ) para a origem 2- Rodar em torno da origem 3- Aplicar translação por forma a levar o ponto arbitrário a (x r, y r ) 29
30 Rotação em torno de um ponto arbitrário É necessário aplicar uma: 1 - uma translação por forma a que o ponto arbitrário coincida com a origem 2 - uma rotação em torno da origem 3 - uma translação por forma a levar o ponto arbitrário para a posição original 3- Translação do ponto arbitrário para a posição original 2- Rotação de θ 1- Ponto arbitrário para a origem TPC: verificar 30
31 Mudança de escala mantendo um ponto fixo (x f, y f ) Posição original do objecto e do ponto ( x f, y f ) 1- Aplicar a translação que leva ( x f, y f ) para a origem 2- Aplicar a mudança de escala 3- Aplicar translação por forma a levar o ponto fixo a ( x f, y r ) 31
32 Propriedades de concatenação de matrizes A multiplicação de matrizes é associativa Dadas quaisquer três matrizes M 1, M 2, M 3, o seu produto pode ser obtido multiplicando em primeiro lugar M 3 por M 2, ou multiplicando primeiro M 2 e M 1 M 3. M 2. M 1 = (M 3. M 2 ). M 1 = M 3. (M 2. M 1 ) Mas os produtos de transformações em geral não são comutativos: M2. M1 = M1. M2 Por exemplo, quando se pretender aplicar uma rotação e uma translação a um objecto, é necessário ter cuidado com a ordem em que se aplicam as transformações 32
33 Por exemplo, quando se pretender aplicar uma rotação e uma translação a um objecto, é necessário ter cuidado com a ordem em que se aplicam as transformações A alteração da ordem de uma sequência de transformações pode afectar o resultado final. Em a) é aplicada a translação na direcção x e depois a rotação de 90º no sentido anti-horário. Em b) o objecto é rodado e depois aplicada a translação Em alguns casos particulares a multiplicação de duas matrizes de transformação é comutativa (duas rotações ou duas mudanças de escala ou duas translações sucessivas) 33
34 Concatenação de transformações e eficiência computacional Uma transformação bidimensional representando uma combinação de transformações (translações, rotações, mudanças de escala) pode ser representada como: termos multiplicativos correspondentes às rotações e mudanças de escala termos correspondentes a distâncias de translação e centro de rotação ou ponto fixo na mudança de escala 34
35 Por exemplo: se um objecto tiver que sofrer uma mudança de escala e uma rotação em torno do seu centróide (x c, y c ) e depois sofrer uma translação, temos: As coordenadas transformadas são dadas por: TPC: verificar 35
36 Assim, para qualquer sequência de transformações, depois de concatenadas numa única matriz, são necessárias apenas: - 4 multiplicações - 4 adições Se não se calcular uma única matriz, cada uma das transformações tem que ser aplicada individualmente, sendo o número de operações muito superior Deve-se, portanto, usar uma única matriz de transformação resultante das várias transformações a aplicar Note-se que os coeficientes dessa matriz apenas têm que ser calculados uma única vez 36
37 Outras transformações Além das transformações básicas (translação, rotação e mudança de escala) alguns packages gráficos fornecem outras transformações que podem ser úteis, como: - reflexão - shearing Shearing na direcção x: Quadrado unitário Paralelogramo resultante de um shear na direcção x 37
38 Reflexão Uma reflexão é uma transformação que produz uma imagem num espelho Uma reflexão em torno do eixo dos xx (y=0) obtém-se multiplicando por -1 as coordenadas y Reflexão em torno do eixo dos xx Uma reflexão em torno do eixo dos yy (x=0) obtém-se multiplicando por -1 as coordenadas x TPC: verificar Reflexão em torno do eixo dos yy 38
39 Questões Como se efectua o shearing nas duas direcções? E as reflexões em torno de eixos paralelos aos eixos coordenados? Ou em torno de eixos que passam pela origem? Bissectores dos quadrante pares ou impares Com qualquer declive Ou mesmo em torno de um eixo qualquer? 39
40 Principal bibliografia D. Hearn and M. P. Baker, Computer Graphics with OpenGL, 3 rd Ed., Addison-Wesley, 2004 E. Angel and D. Shreiner, Introduction to Computer Graphics, 6 th Ed., Pearson Education, 2012 J. Foley et al., Introduction to Computer Graphics, Addison-Wesley,
Introdução à Computação Gráfica
 Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Transformações Geométricas
 Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
A RV e RA e suas aplicações na TVD 23/04/2012
 A Realidade Virtual e Aumentada e suas aplicações na Televisão Digital 3. Computação Gráfica Básica Prof. Dr. Antonio Carlos Sementille Departamento de Computação/FC semente@fc.unesp.br O pipeline O pipeline
A Realidade Virtual e Aumentada e suas aplicações na Televisão Digital 3. Computação Gráfica Básica Prof. Dr. Antonio Carlos Sementille Departamento de Computação/FC semente@fc.unesp.br O pipeline O pipeline
Transformações Geométricas Grafos de Cena
 Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
4. Curvas Paramétricas e Transformações 2D
 4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Transformações de Pontos. Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles
 Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
Transformações (Cap 4.3, 4.4 e 4.6 a 4.10)
") 4.6 a 4.) Transformações (Cap 4.3, 4.4 e 4.6 a 4.) Instituto Superior Técnico, 26/27 Sumário Revisões Transformações Elementares Coordenadas Homogéneas Composição de Transformações Transformações em OpenGL
4.6 a 4.) Transformações (Cap 4.3, 4.4 e 4.6 a 4.) Instituto Superior Técnico, 26/27 Sumário Revisões Transformações Elementares Coordenadas Homogéneas Composição de Transformações Transformações em OpenGL
aula6 Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Translação. Sistemas de Coordenadas. Translação. Transformações Geométricas 3D
 Translação Transformações Geométricas 3D Um ponto (objeto) é deslocado de uma posição para outra posição no mesmo espaço 3D Rosane Minghim Maria Cristina F. de Oliveira ICMC Universidade de São Paulo 26
Translação Transformações Geométricas 3D Um ponto (objeto) é deslocado de uma posição para outra posição no mesmo espaço 3D Rosane Minghim Maria Cristina F. de Oliveira ICMC Universidade de São Paulo 26
Sumário COMPUTAÇÃO GRÁFICA E INTERFACES. Modelos e modelagem. Modelos e modelagem. Transformações Geométricas e Visualização 2D
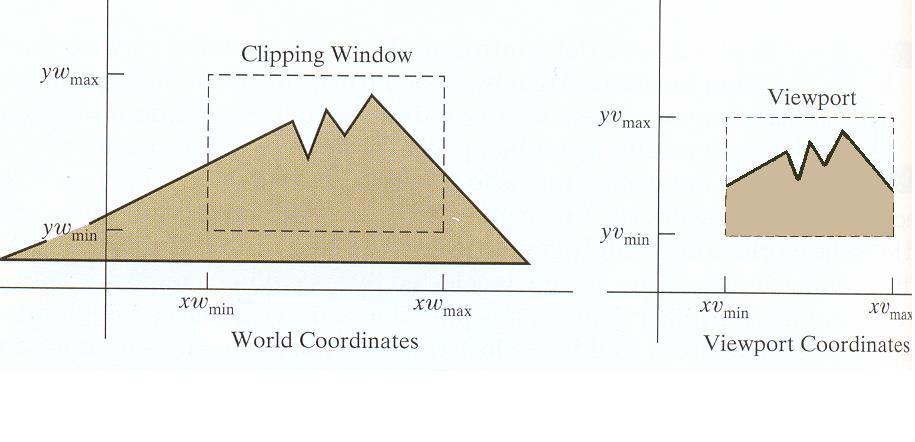
 Sumário COMPUTAÇÃO GRÁFICA E INTERFACES Transformações Geométricas e Visualização D Transformações geométricas Pipeline de visualização D Transformação de coordenadas Window-Viewport Recorte (Clipping)
Sumário COMPUTAÇÃO GRÁFICA E INTERFACES Transformações Geométricas e Visualização D Transformações geométricas Pipeline de visualização D Transformação de coordenadas Window-Viewport Recorte (Clipping)
Sistemas de Referência
 Sistemas de Referência Um sistema de coordenada é denominado de Sistema de Referência quando servir para alguma finalidade específica; Aspectos a serem observados na definição de um sistema de referência:
Sistemas de Referência Um sistema de coordenada é denominado de Sistema de Referência quando servir para alguma finalidade específica; Aspectos a serem observados na definição de um sistema de referência:
Curso de CG 2019/1 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 Considere o triângulo T={V 1, V 2, V 3 }, com V
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 Considere o triângulo T={V 1, V 2, V 3 }, com V
aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
Transformações Geométricas
 Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Curso de CG 2018/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
Conceitos de vetores. Decomposição de vetores
 Conceitos de vetores. Decomposição de vetores 1. Introdução De forma prática, o conceito de vetor pode ser bem assimilado com auxílio da representação matemática de grandezas físicas. Figura 1.1 Grandezas
Conceitos de vetores. Decomposição de vetores 1. Introdução De forma prática, o conceito de vetor pode ser bem assimilado com auxílio da representação matemática de grandezas físicas. Figura 1.1 Grandezas
Transformações Geométricas em C.G.
 Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
1. Considere a seguinte matriz dos vértices dum triângulo D = 0 2 3
 INSTITUTO SUPERIOR TÉCNICO - DEPARTAMENTO DE MATEMÁTICA 7 a LISTA DE PROBLEMAS E EXERCÍCIOS DE ÁLGEBRA LINEAR LEIC-Taguspark, LERCI, LEGI, LEE 1 o semestre 2006/07 - aulas práticas de 2006-12-04 e 2006-12-06
INSTITUTO SUPERIOR TÉCNICO - DEPARTAMENTO DE MATEMÁTICA 7 a LISTA DE PROBLEMAS E EXERCÍCIOS DE ÁLGEBRA LINEAR LEIC-Taguspark, LERCI, LEGI, LEE 1 o semestre 2006/07 - aulas práticas de 2006-12-04 e 2006-12-06
Modelos Geométricos Transformações
 Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
ESCOLA SECUNDÁRIA COM 2º E 3º CICLOS ANSELMO DE ANDRADE
 ESCOLA SECUNDÁRIA COM 2º E 3º CICLOS ANSELMO DE ANDRADE ANO LECTIVO 2010-2011 MATEMÁTICA 8º ANO DE ESCOLARIDADE NOME: Nº: DATA: / / Isometria ISOMETRIA: Transformação geométrica que preserva as distâncias
ESCOLA SECUNDÁRIA COM 2º E 3º CICLOS ANSELMO DE ANDRADE ANO LECTIVO 2010-2011 MATEMÁTICA 8º ANO DE ESCOLARIDADE NOME: Nº: DATA: / / Isometria ISOMETRIA: Transformação geométrica que preserva as distâncias
1º Teste de Computação Gráfica 3º Ano
 1º Teste de omputação Gráfica 3º no Licenciatura em Eng. Informática e de omputadores Prof. responsável risson Lopes 5 de Maio de 2000 Nº «Número» Nome: «Nome» Sala: «Sala» Responda às questões seguintes
1º Teste de omputação Gráfica 3º no Licenciatura em Eng. Informática e de omputadores Prof. responsável risson Lopes 5 de Maio de 2000 Nº «Número» Nome: «Nome» Sala: «Sala» Responda às questões seguintes
Lista de Exercícios de Cálculo 3 Primeira Semana
 Lista de Exercícios de Cálculo 3 Primeira Semana Parte A 1. Se v é um vetor no plano que está no primeiro quadrante, faz um ângulo de π/3 com o eixo x positivo e tem módulo v = 4, determine suas componentes.
Lista de Exercícios de Cálculo 3 Primeira Semana Parte A 1. Se v é um vetor no plano que está no primeiro quadrante, faz um ângulo de π/3 com o eixo x positivo e tem módulo v = 4, determine suas componentes.
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
Mudança de Coordenadas
 Mudanças de Coordenadas Mudança de Coordenadas A origem O = (0, 0, 0) e os vetores i, j, k da base canônica de R determinam um sistema de coordenadas: se as coordenadas de um ponto no espaço são (x, y,
Mudanças de Coordenadas Mudança de Coordenadas A origem O = (0, 0, 0) e os vetores i, j, k da base canônica de R determinam um sistema de coordenadas: se as coordenadas de um ponto no espaço são (x, y,
Isometrias ESCOLA SECUNDÁRIA ANSELMO DE ANDRADE
 Isometrias Isometria: do grego ισο + μέτρο (ισο = iso = igual; μέτρο = metria = medida) Uma isometria é uma transformação geométrica que preserva as distâncias entre pontos e consequentemente as amplitudes
Isometrias Isometria: do grego ισο + μέτρο (ισο = iso = igual; μέτρο = metria = medida) Uma isometria é uma transformação geométrica que preserva as distâncias entre pontos e consequentemente as amplitudes
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Visualização 3D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Visualização 3D Computação Visual Beatriz Sousa Santos, J. Madeira Visualização 3D Os processos envolvidos na obtenção
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Visualização 3D Computação Visual Beatriz Sousa Santos, J. Madeira Visualização 3D Os processos envolvidos na obtenção
Computação Gráfica. Prof. MSc. André Yoshimi Kusumoto
 Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Transformações Geométricas São operações que podem ser utilizadas visando a alteração de algumas características como posição,
Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Transformações Geométricas São operações que podem ser utilizadas visando a alteração de algumas características como posição,
Escola Secundária com 3º ciclo D. Dinis 11º Ano de Matemática A Tema I Geometria no Plano e no Espaço II. 2º Teste de avaliação.
 Escola Secundária com 3º ciclo D. Dinis 11º Ano de Matemática A Tema I Geometria no Plano e no Espaço II 2º Teste de avaliação Grupo I As cinco questões deste grupo são de escolha múltipla. Para cada uma
Escola Secundária com 3º ciclo D. Dinis 11º Ano de Matemática A Tema I Geometria no Plano e no Espaço II 2º Teste de avaliação Grupo I As cinco questões deste grupo são de escolha múltipla. Para cada uma
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Transformações Geométricas
 Transformações Geométricas Computação Gráfica CG & ND @ 26 ISEL/DEETC/S Computação Gráfica 2 http://hof.povra.org/images/office-3.jpg Sumário Transformações geométricas Translação Rotação Escala Shearing
Transformações Geométricas Computação Gráfica CG & ND @ 26 ISEL/DEETC/S Computação Gráfica 2 http://hof.povra.org/images/office-3.jpg Sumário Transformações geométricas Translação Rotação Escala Shearing
Escola Secundária com 3º ciclo D. Dinis 11º Ano de Matemática A Tema I Geometria no Plano e no Espaço II. 2º Teste de avaliação.
 Escola Secundária com º ciclo D. Dinis 11º Ano de Matemática A Tema I Geometria no Plano e no Espaço II º Teste de avaliação Grupo I As cinco questões deste grupo são de escolha múltipla. Para cada uma
Escola Secundária com º ciclo D. Dinis 11º Ano de Matemática A Tema I Geometria no Plano e no Espaço II º Teste de avaliação Grupo I As cinco questões deste grupo são de escolha múltipla. Para cada uma
Aula9 e 10. Projeções Planas. Como representar objetos 3D em dispositivos 2D? 2019/1 IC / UFF. Paginas 91 a 101 livro texto de computacao grafica
 Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Determinação da Visibilidade
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Determinação da Visibilidade Beatriz Sousa Santos, J. Madeira Uma classificação Os métodos de visibilidade podem ser basicamente
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Determinação da Visibilidade Beatriz Sousa Santos, J. Madeira Uma classificação Os métodos de visibilidade podem ser basicamente
Departamento de Matemática e Ciências Experimentais FÍSICA 12.º Ano
 Departamento de Matemática e Ciências Eperimentais FÍSICA 12.º Ano Teto de apoio n.º 1 Assunto: Calculo vectorial O vector é uma entidade matemática caracteriada por três elementos: módulo, (magnitude
Departamento de Matemática e Ciências Eperimentais FÍSICA 12.º Ano Teto de apoio n.º 1 Assunto: Calculo vectorial O vector é uma entidade matemática caracteriada por três elementos: módulo, (magnitude
Exame de Época Especial Computação Gráfica
 Exame de Época Especial Computação Gráfica LEIC/MEIC Ano Lectivo de 2008/2009 Prof. João Brisson Lopes 9 de Setembro 2009 Nº Nome: Responda o mais completamente às seguintes questões justificando adequadamente
Exame de Época Especial Computação Gráfica LEIC/MEIC Ano Lectivo de 2008/2009 Prof. João Brisson Lopes 9 de Setembro 2009 Nº Nome: Responda o mais completamente às seguintes questões justificando adequadamente
CAPÍTULO 2 CÁLCULO VECTORIAL Grandezas escalares e vectoriais. Noção de Vector. As grandezas físicas podem ser escalares ou vectoriais.
 CAPÍTULO CÁLCULO VECTORIAL.1. Grandeas escalares e vectoriais. Noção de Vector. As grandeas físicas podem ser escalares ou vectoriais. As grandeas massa, comprimento, tempo ficam completamente definidas
CAPÍTULO CÁLCULO VECTORIAL.1. Grandeas escalares e vectoriais. Noção de Vector. As grandeas físicas podem ser escalares ou vectoriais. As grandeas massa, comprimento, tempo ficam completamente definidas
Câmara Virtual Simples
 Câmara Virtual Simples Edward Angel, Cap. 5 Instituto Superior Técnico Computação Gráfica 29/2 Na última aula... Pipeline de Visualiação 3D Câmara Virtual 2, CG&M/IST e Figuras Addison Wesley Sumário Câmara
Câmara Virtual Simples Edward Angel, Cap. 5 Instituto Superior Técnico Computação Gráfica 29/2 Na última aula... Pipeline de Visualiação 3D Câmara Virtual 2, CG&M/IST e Figuras Addison Wesley Sumário Câmara
Agrupamento de Escolas da Senhora da Hora
 Agrupamento de Escolas da Senhora da Hora Curso Profissional de Técnico de Multimédia Informação Prova da Disciplina de Física - Módulo: 1 Forças e Movimentos; Estática Modalidade da Prova: Escrita Ano
Agrupamento de Escolas da Senhora da Hora Curso Profissional de Técnico de Multimédia Informação Prova da Disciplina de Física - Módulo: 1 Forças e Movimentos; Estática Modalidade da Prova: Escrita Ano
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Visualização 3D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Visualização 3D Computação Visual Beatriz Sousa Santos, J. Madeira Visualização 3D Os processos envolvidos na obtenção
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Visualização 3D Computação Visual Beatriz Sousa Santos, J. Madeira Visualização 3D Os processos envolvidos na obtenção
Perspectivas Cap 2 (do livro texto) Aula 7 UFF
 Aula 7 UFF") Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Prof. Fernando V. Paulovich 3 de maio de SCC Computação Gráca
 Transformações Geométricas 2D SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Transformações Geométricas 2D SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
2.1 Translação, rotação e deformação da vizinhança elementar Variação relativa do comprimento (Extensão)
") Cap.. Deformação 1. Deslocamento. Gradiente de deformação.1 ranslação, rotação e deformação da vizinhança elementar 3. ensor de deformação de agrange 4. ensor das pequenas deformações 4.1 Caracter tensorial
Cap.. Deformação 1. Deslocamento. Gradiente de deformação.1 ranslação, rotação e deformação da vizinhança elementar 3. ensor de deformação de agrange 4. ensor das pequenas deformações 4.1 Caracter tensorial
Programa Princípios Gerais Forças, vetores e operações vetoriais
 Programa Princípios Gerais Forças, vetores e operações vetoriais Representação gráfica de vetores Graficamente, um vetor é representado por uma flecha: a intensidade é o comprimento da flecha; a direção
Programa Princípios Gerais Forças, vetores e operações vetoriais Representação gráfica de vetores Graficamente, um vetor é representado por uma flecha: a intensidade é o comprimento da flecha; a direção
Animação por Computador. Sólidos Transformações lineares Hierarquia de movimento Parametrização da orientação Interpolação da orientação
 Sólidos Transformações lineares Hierarquia de movimento Parametrização da orientação Interpolação da orientação 1 Considera-se sólido como conjunto de pontos com posições fixas em relação a um sistema
Sólidos Transformações lineares Hierarquia de movimento Parametrização da orientação Interpolação da orientação 1 Considera-se sólido como conjunto de pontos com posições fixas em relação a um sistema
ROBÓTICA TRANSFORMAÇÕES MATRICIAIS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial TRANSFORMAÇÕES MATRICIAIS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial TRANSFORMAÇÕES MATRICIAIS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
CAPíTULO 1. Vetores e tensores Notação indicial
 CAPíTULO 1 Vetores e tensores 1.1. Notação indicial A notação indicial é uma simplificação da notação de uma somatória. Por exemplo, seja a somatória de 3 monômios a i b i (a i multiplicado por b i ) com
CAPíTULO 1 Vetores e tensores 1.1. Notação indicial A notação indicial é uma simplificação da notação de uma somatória. Por exemplo, seja a somatória de 3 monômios a i b i (a i multiplicado por b i ) com
Transformações 2D. Prof. Márcio Bueno Fonte: Material do Prof. Robson Pequeno de Sousa e do Prof.
 Transformações 2D Prof. Márcio Bueno {cgtarde,cgnoite}@marciobueno.com Fonte: Material do Prof. Robson Pequeno de Sousa e do Prof. Robson Lins Transformações 2D Transformações Geométricas são a base de
Transformações 2D Prof. Márcio Bueno {cgtarde,cgnoite}@marciobueno.com Fonte: Material do Prof. Robson Pequeno de Sousa e do Prof. Robson Lins Transformações 2D Transformações Geométricas são a base de
Aula de Problemas 1. Problema 1. Demonstre o teorema de Pitágoras (geometria euclidiana):
:") Aula de Problemas 1 Problema 1 Demonstre o teorema de Pitágoras (geometria euclidiana): sin cos 1. Mostre que outra forma de exprimir este teorema é a seguinte: ab ab a b, em que ab, 3. Faz-se a a e b
Aula de Problemas 1 Problema 1 Demonstre o teorema de Pitágoras (geometria euclidiana): sin cos 1. Mostre que outra forma de exprimir este teorema é a seguinte: ab ab a b, em que ab, 3. Faz-se a a e b
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
 Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
ROBÓTICA (ROB74) AULA 2. TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug
 AULA 2. TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug PROGRAMA Transformações Geométricas e Coordenadas Homogêneas Notações Introdutórias Vetores, matrizes, pontos
ROBÓTICA (ROB74) AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug PROGRAMA Transformações Geométricas e Coordenadas Homogêneas Notações Introdutórias Vetores, matrizes, pontos
Física I 2010/2011. Aula 16. Momento de uma Força e Momento Angular
 Física I 2010/2011 Aula 16 Momento de uma Força e Momento Angular Sumário O Momento angular A 2.ª Lei de Newton na forma angular O Momento Angular de um Sistema de Partículas O Momento Angular de um Corpo
Física I 2010/2011 Aula 16 Momento de uma Força e Momento Angular Sumário O Momento angular A 2.ª Lei de Newton na forma angular O Momento Angular de um Sistema de Partículas O Momento Angular de um Corpo
Instituto de Física Universidade Federal do Rio de Janeiro. Cap. 1 - Vetores. Prof. Elvis Soares - Física I
 Instituto de Física Universidade Federal do Rio de Janeiro Cap. 1 - Vetores Prof. Elvis Soares - Física I 2014.1 Vetores são descrições matemáticas de quantidades que possuem intensidade, direção e sentido.
Instituto de Física Universidade Federal do Rio de Janeiro Cap. 1 - Vetores Prof. Elvis Soares - Física I 2014.1 Vetores são descrições matemáticas de quantidades que possuem intensidade, direção e sentido.
1 Vetores no Plano e no Espaço
 1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
Coordenadas Homogêneas
 Coordenadas Homogêneas André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Coordenadas Homogêneas André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Cap. 0. Cálculo tensorial
 Cap. 0. Cálculo tensorial 1. Quantidades físicas 1.1 ipos das quantidades físicas 1. Descrição matemática dos tensores 1.3 Definição dos tensores. Álgebra tensorial 3. ensores cartesianos em D simétricos
Cap. 0. Cálculo tensorial 1. Quantidades físicas 1.1 ipos das quantidades físicas 1. Descrição matemática dos tensores 1.3 Definição dos tensores. Álgebra tensorial 3. ensores cartesianos em D simétricos
Transformações de Visualização 2D: Clipping. Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro
 Transformações de Visualização 2D: Clipping Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro 1 Clipping (recorte) Qualquer procedimento que identifica porções de uma figura que estão
Transformações de Visualização 2D: Clipping Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro 1 Clipping (recorte) Qualquer procedimento que identifica porções de uma figura que estão
1 Espaços Vectoriais
 Nova School of Business and Economics Apontamentos Álgebra Linear 1 Definição Espaço Vectorial Conjunto de elementos que verifica as seguintes propriedades: Existência de elementos: Contém pelo menos um
Nova School of Business and Economics Apontamentos Álgebra Linear 1 Definição Espaço Vectorial Conjunto de elementos que verifica as seguintes propriedades: Existência de elementos: Contém pelo menos um
Transformações Geométricas
 Transformações Geométricas Profª. Alessandra Martins Coelho março/2013 Objetivos Entender os princípios das transformações geométricas do tipo translação, rotação e escalamento. Efetuar transformações
Transformações Geométricas Profª. Alessandra Martins Coelho março/2013 Objetivos Entender os princípios das transformações geométricas do tipo translação, rotação e escalamento. Efetuar transformações
Descrições Espaciais e Transformações
 4 o Engenharia de Controle e utomação FCI / 29 rof. Maurílio J. Inácio Descrição de posição e orientação O estudo de robótica envolve constantemente a localização de objetos (as partes e ferramentas) em
4 o Engenharia de Controle e utomação FCI / 29 rof. Maurílio J. Inácio Descrição de posição e orientação O estudo de robótica envolve constantemente a localização de objetos (as partes e ferramentas) em
GEOMETRIA II EXERCÍCIOS RESOLVIDOS - ABRIL, 2018
 GEOMETRIA II EXERCÍCIOS RESOLVIDOS - ABRIL, 08 ( Seja a R e f(x, y ax + ( ay. Designe por C a a cónica dada por f(x, y 0. (a Mostre que os quatro pontos (±, ± R pertencem a todas as cónicas C a (independentemente
GEOMETRIA II EXERCÍCIOS RESOLVIDOS - ABRIL, 08 ( Seja a R e f(x, y ax + ( ay. Designe por C a a cónica dada por f(x, y 0. (a Mostre que os quatro pontos (±, ± R pertencem a todas as cónicas C a (independentemente
1º Teste de Computação Gráfica
 1º Teste de Computação Gráfica LEIC/LESIM/LCI Prof. João Brisson Lopes Prof. Mário Rui Gomes 15 de Abril de 23 Nº Nome: Responda às questões seguintes justificando adequadamente todas as respostas. O teste
1º Teste de Computação Gráfica LEIC/LESIM/LCI Prof. João Brisson Lopes Prof. Mário Rui Gomes 15 de Abril de 23 Nº Nome: Responda às questões seguintes justificando adequadamente todas as respostas. O teste
Coordenadas Homogêneas no Plano e no Espaço
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
Aulas práticas de Álgebra Linear
 Ficha 3 Aulas práticas de Álgebra Linear Licenciatura em Engenharia Naval e Oceânica Mestrado Integrado em Engenharia Mecânica 1 o semestre 2018/19 Jorge Almeida e Lina Oliveira Departamento de Matemática,
Ficha 3 Aulas práticas de Álgebra Linear Licenciatura em Engenharia Naval e Oceânica Mestrado Integrado em Engenharia Mecânica 1 o semestre 2018/19 Jorge Almeida e Lina Oliveira Departamento de Matemática,
Escola Básica Integrada c/ Jardim de Infância da Malagueira SÍNTESE DO TÓPICO ISOMETRIAS. rotaçã
 Escola Básica Integrada c/ Jardim de Infância da Malagueira Ficha informativa nº9 Matemática Nome: Nº: Ano: 8º Turma: Data: 11 SÍNTESE DO TÓPICO ISOMETRIAS ISOMETRIAS I - Transformações geométricas: reflexão,
Escola Básica Integrada c/ Jardim de Infância da Malagueira Ficha informativa nº9 Matemática Nome: Nº: Ano: 8º Turma: Data: 11 SÍNTESE DO TÓPICO ISOMETRIAS ISOMETRIAS I - Transformações geométricas: reflexão,
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Introdução: A necessidade de ampliação dos conjuntos Numéricos. Considere incialmente o conjunto dos números naturais :
 Introdução: A necessidade de ampliação dos conjuntos Numéricos Considere incialmente o conjunto dos números naturais : Neste conjunto podemos resolver uma infinidade de equações do tipo A solução pertence
Introdução: A necessidade de ampliação dos conjuntos Numéricos Considere incialmente o conjunto dos números naturais : Neste conjunto podemos resolver uma infinidade de equações do tipo A solução pertence
Reflexões e Sombras em Superfícies Planares Animação e Visualização Tridimensional Prof. João Madeiras Pereira Instituto Superior Técnico 2005/2006
 Reflexões e Sombras em Superfícies Planares Animação e Visualização Tridimensional Prof. João Madeiras Pereira Instituto Superior Técnico 2005/2006 Reflexões - Motivação Ainda não é possível usar algoritmos
Reflexões e Sombras em Superfícies Planares Animação e Visualização Tridimensional Prof. João Madeiras Pereira Instituto Superior Técnico 2005/2006 Reflexões - Motivação Ainda não é possível usar algoritmos
Vectores e Geometria Analítica
 Capítulo 1 Vectores e Geometria Analítica 1.1 Vectores em R 2 e R 3. Exercício 1.1.1 Determine um vector unitário que tenha a mesma direcção e sentido que o vector u e outro que que tenha sentido contrário
Capítulo 1 Vectores e Geometria Analítica 1.1 Vectores em R 2 e R 3. Exercício 1.1.1 Determine um vector unitário que tenha a mesma direcção e sentido que o vector u e outro que que tenha sentido contrário
Álgebra Linear e Geometria Anaĺıtica. Matrizes e Sistemas de Equações Lineares
 universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 1 Matrizes e Sistemas de Equações Lineares Geometria anaĺıtica em R 3 [1 01]
universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 1 Matrizes e Sistemas de Equações Lineares Geometria anaĺıtica em R 3 [1 01]
Chamaremos AC de vetor soma (um Vetor resultante) dos vetores AB e BC. Essa soma não é uma soma algébrica comum.
 dos vetores AB e BC. Essa soma não é uma soma algébrica comum.") Vetores Uma partícula que se move em linha reta pode se deslocar em apenas uma direção, sendo o deslocamento positivo em uma e negativo na outra direção. Quando uma partícula se move em três dimensões,
Vetores Uma partícula que se move em linha reta pode se deslocar em apenas uma direção, sendo o deslocamento positivo em uma e negativo na outra direção. Quando uma partícula se move em três dimensões,
Chamamos de grandezas coisas que podem ser medidas. Por exemplo, tempo, área, volume, temperatura, velocidade, aceleração, força, etc..
 Introdução a vetor Professor Fiore O que são grandezas? Chamamos de grandezas coisas que podem ser medidas. Por exemplo, tempo, área, volume, temperatura, velocidade, aceleração, força, etc.. O que são
Introdução a vetor Professor Fiore O que são grandezas? Chamamos de grandezas coisas que podem ser medidas. Por exemplo, tempo, área, volume, temperatura, velocidade, aceleração, força, etc.. O que são
Preparar o Exame Matemática A
 07. { {. 07. Como o polinómio tem coeficientes reais e é uma das suas raízes, então também é raiz de. Recorrendo à regra de Ruffini vem,. Utilizando a fórmula resolvente na equação, vem: ssim, as restantes
07. { {. 07. Como o polinómio tem coeficientes reais e é uma das suas raízes, então também é raiz de. Recorrendo à regra de Ruffini vem,. Utilizando a fórmula resolvente na equação, vem: ssim, as restantes
Fundamentos Matemáticos de Computação Gráfica
 Fundamentos Matemáticos de Computação Gráfica Fundamentos Matemáticos de CG Vetores e Pontos Matrizes Transformações Geométricas Referências: Mathematics for Computer Graphics Applications. M. E. Mortenson.
Fundamentos Matemáticos de Computação Gráfica Fundamentos Matemáticos de CG Vetores e Pontos Matrizes Transformações Geométricas Referências: Mathematics for Computer Graphics Applications. M. E. Mortenson.
CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR
 O que vamos estudar? CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR Seção 11.1 Cinemática do corpo rígido Seção 11.2 Representação vetorial das rotações Seção 11.3 Torque Seção 11.4 Momento angular Seção 11.5
O que vamos estudar? CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR Seção 11.1 Cinemática do corpo rígido Seção 11.2 Representação vetorial das rotações Seção 11.3 Torque Seção 11.4 Momento angular Seção 11.5
Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC
 Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC Introdução à Mecânica do Contínuo Tensores Professor: Márcio André Araújo Cavalcante
Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC Introdução à Mecânica do Contínuo Tensores Professor: Márcio André Araújo Cavalcante
Mecânica e Ondas fascículo 4
 Mecânica e Ondas fascículo 4 March 6, 2008 Contents 5 Vectores 50 5.1 Deslocamento............................. 50 5.2 Adição de vectores.......................... 52 5.3 Negativo de um vector........................
Mecânica e Ondas fascículo 4 March 6, 2008 Contents 5 Vectores 50 5.1 Deslocamento............................. 50 5.2 Adição de vectores.......................... 52 5.3 Negativo de um vector........................
aula6 2018/2 IC / UFF Como representar objetos 3D em dispositivos 2D?
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p 2018/2 IC / UFF aula6: Projeções Planas Material disponível
http://computacaografica.ic.uff.br/conteudocap2.html aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p 2018/2 IC / UFF aula6: Projeções Planas Material disponível
Curso de Computação Gráfica (CG) 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito
 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito") Curso de Computação Gráfica (CG) 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito 1- Mostre porque a matriz de rotação 3D em torno do eixo y precisa ter o valor
Curso de Computação Gráfica (CG) 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito 1- Mostre porque a matriz de rotação 3D em torno do eixo y precisa ter o valor
Ficha de Exercícios nº 3
 Nova School of Business and Economics Álgebra Linear Ficha de Exercícios nº 3 Transformações Lineares, Valores e Vectores Próprios e Formas Quadráticas 1 Qual das seguintes aplicações não é uma transformação
Nova School of Business and Economics Álgebra Linear Ficha de Exercícios nº 3 Transformações Lineares, Valores e Vectores Próprios e Formas Quadráticas 1 Qual das seguintes aplicações não é uma transformação
Sistemas de coordenadas Transformação entre sistemas
 http://computacaografica.ic.uff.br/conteudocap2.html Sistemas de coordenadas Transformação entre sistemas 2019-1 Sistemas de Coordenadas Referência sobre o tamanho e a posição dos objetos na área de trabalho;
http://computacaografica.ic.uff.br/conteudocap2.html Sistemas de coordenadas Transformação entre sistemas 2019-1 Sistemas de Coordenadas Referência sobre o tamanho e a posição dos objetos na área de trabalho;
Geometria e Programação Geométrica
 Geometria e Programação Geométrica Capítulo 5 (Foley & van Dam) Carlos Hitoshi Morimoto (hitoshi@ime.usp.br) Exemplos Intersecções geométricas: Como sabemos quando uma bola bate na parede? Orientação Como
Geometria e Programação Geométrica Capítulo 5 (Foley & van Dam) Carlos Hitoshi Morimoto (hitoshi@ime.usp.br) Exemplos Intersecções geométricas: Como sabemos quando uma bola bate na parede? Orientação Como
que transforma A em F. T (A) = F significa que a imagem do ponto A pela translação associada ao vetor é o ponto F. Assim o vetor =.
 = F significa que a imagem do ponto A pela translação associada ao vetor é o ponto F. Assim o vetor =.") Escola Básica de Santa Marinha Matemática 2010/2011 8.º Ano Síntese de conteúdos Isometrias 1. Translação 1.1 Translação associada a um vector A translação é uma deslocação em linha reta que corresponde
Escola Básica de Santa Marinha Matemática 2010/2011 8.º Ano Síntese de conteúdos Isometrias 1. Translação 1.1 Translação associada a um vector A translação é uma deslocação em linha reta que corresponde
aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
TRANSFORMAÇÕES GEOMÉTRICAS
 TRANSFORMAÇÕES GEOMÉTRICAS É essencial retomar a intenção de dar às transformações geométricas o seu papel importante no ensino da geometria, num tratamento que tenha por ponto de partida e desenvolva
TRANSFORMAÇÕES GEOMÉTRICAS É essencial retomar a intenção de dar às transformações geométricas o seu papel importante no ensino da geometria, num tratamento que tenha por ponto de partida e desenvolva
Gabarito - P1 de CG 2019 /1
 Gabarito - P1 de CG 2019 /1 1- Mencione qual a vantagem de usar estruturas de dados baseada em Faces e Vértices para criar objetos ao invés de apenas uma estrutura baseada em coordenadas dos Vértices.
Gabarito - P1 de CG 2019 /1 1- Mencione qual a vantagem de usar estruturas de dados baseada em Faces e Vértices para criar objetos ao invés de apenas uma estrutura baseada em coordenadas dos Vértices.
Pontifícia Universidade Católica do Rio de Janeiro / PUC-Rio Departamento de Engenharia Mecânica. ENG1705 Dinâmica de Corpos Rígidos.
 Pontifícia Universidade Católica do Rio de Janeiro / PUC-Rio Departamento de Engenharia Mecânica ENG1705 Dinâmica de Corpos Rígidos (Período: 2016.1) Notas de Aula Capítulo 1: VETORES Ivan Menezes ivan@puc-rio.br
Pontifícia Universidade Católica do Rio de Janeiro / PUC-Rio Departamento de Engenharia Mecânica ENG1705 Dinâmica de Corpos Rígidos (Período: 2016.1) Notas de Aula Capítulo 1: VETORES Ivan Menezes ivan@puc-rio.br
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
Vetores de força. Objetivos da aula. Mostrar como adicionar forças e decompô-las em componentes usando a lei do paralelogramo.
 Objetivos da aula Vetores de força Mostrar como adicionar forças e decompô-las em componentes usando a lei do paralelogramo. Expressar a força e sua posição na forma de um vetor cartesiano e explicar como
Objetivos da aula Vetores de força Mostrar como adicionar forças e decompô-las em componentes usando a lei do paralelogramo. Expressar a força e sua posição na forma de um vetor cartesiano e explicar como
ALGA /09 - Geometria Analítica 78. Geometria Analítica
 ALGA - 00/09 - Geometria Analítica 7 Geometria Analítica A noção de recta em R e R ; tal como a noção de plano em R já foram abordados no ensino secundário. Neste capítulo faz-se um revisão desses conceitos
ALGA - 00/09 - Geometria Analítica 7 Geometria Analítica A noção de recta em R e R ; tal como a noção de plano em R já foram abordados no ensino secundário. Neste capítulo faz-se um revisão desses conceitos
Universidade Federal do Rio de Janeiro Instituto de Física. Física I IGM1 2014/1. Cap. 1 - Vetores. Prof. Elvis Soares
 Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 1 - Vetores Prof. Elvis Soares Vetores são descrições matemáticas de quantidades que possuem intensidade, direção e
Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 1 - Vetores Prof. Elvis Soares Vetores são descrições matemáticas de quantidades que possuem intensidade, direção e
Produto Misto, Determinante e Volume
 15 Produto Misto, Determinante e Volume Sumário 15.1 Produto Misto e Determinante............ 2 15.2 Regra de Cramer.................... 10 15.3 Operações com matrizes............... 12 15.4 Exercícios........................
15 Produto Misto, Determinante e Volume Sumário 15.1 Produto Misto e Determinante............ 2 15.2 Regra de Cramer.................... 10 15.3 Operações com matrizes............... 12 15.4 Exercícios........................
Aula 5 - Produto Vetorial
 Aula 5 - Produto Vetorial Antes de iniciar o conceito de produto vetorial, precisamos recordar como se calculam os determinantes. Mas o que é um Determinante? Determinante é uma função matricial que associa
Aula 5 - Produto Vetorial Antes de iniciar o conceito de produto vetorial, precisamos recordar como se calculam os determinantes. Mas o que é um Determinante? Determinante é uma função matricial que associa