Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
|
|
|
- Eduarda Machado Quintanilha
- 5 Há anos
- Visualizações:
Transcrição
1 Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
2 Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial + Produto Interno 3 x, y 3 i x i y i
3 Transformações Geometria Euclideana Movimentos rígidos + transf. de semelhança. Conceitos: congruência e semelhança. Geometria Afim Transf. Lineares + translações. Conceitos: razões e proporções.
4 Transformações Lineares Definição T(x + y) = T(x) + T(y) T(λx) = λ T(x) Conjunto de todos os operadores lineares em R n forma um espaço vetorial de dimensão n 2. Existe um isomorfismo entre a álgebra dos operadores lineares em R n, determinado por uma base, sobre a álgebra das matrizes quadradas n x n.
5 Basta Aplicar Basta Aplicar T aos Vetores da Base aos Vetores da Base ) ( ) ( ) ( (,,,,..,), n i i i i n i i i i n i i u v T v u T v T u v u v ' 23 ' 3 ' 32 ' 22 ' 2 ' 3 ' 2 ' ' )) ( ), ( ), ( ( ) ( v v v u u u u u u u u u v v v u T u T u T v T
6 Transformações Lineares Bidimensionais A origem é o único ponto fixo. Logo, a translação não é uma transformação linear. São representadas por matrizes 2 x 2. T a b c d x y ax bx cy dy
7 Rotação R cos( ) sin( ) sin( ) cos( )
8 Escala S x k
9 Reflexão em Relação ao Eixo X Rfl x
10 Reflexão em Relação ao Eixo Y Rfl y
11 Reflexão em Relação à Reta y = x Rfl y x
12 Cisalhamento em X C x k
13 Cisalhamento em Y C y k
14 Transformações Rígidas Rotações, Reflexões e Translações. Preservam ângulos e comprimentos. Matrizes Ortonormais. Inversa é a matriz transposta (T - = T T ). Isometrias do Espaço Euclideano. a 2 b 2, c 2 d 2 ac bd, ad bc


15 Isometrias do Plano
16 Composição de Transformações Quando for necessário transformar um objeto em relação a um ponto P arbitrário: Translada-se P para origem. Aplicam-se uma ou mais transformações lineares elementares. Aplica-se a transformação desejada. Aplicam-se as transformações elementares inversas. Aplica-se a translação inversa.
17 Plano Projetivo Real O plano projetivo RP 2 é o conjunto das retas do R 3 que passam pela origem. Um ponto do plano projetivo é definido como: P { ( x, y, z);,( x, y, z) (,,)} Denotado por P = [x,y,z] em coordenadas homogêneas (uma classe de equivalência). Um ponto do RP 2 é uma reta do R 3 e uma reta do RP 2 é um plano do R 3. Coordenadas homogêneas não fazem distinção entre pontos ideais (direções no plano afim) e pontos projetivos (pontos do plano afim).
18 Ponto Projetivo Considerando o plano z = como o plano afim Euclideano mergulhado em RP 2 : P [ x, y, z] RP 2, z P x / z y / z Representa a interseção da reta λ(x,y,z) com o plano z = ou (λ = /z). Partição do plano projetivo em dois conjuntos: RP 2 x y x y
19 Os pontos no plano z = são chamados de pontos ideais, e correspondem à interseção de retas paralelas no plano afim. Pontos Ideais
20 Infinito e O Plano Projetivo



21 Onde Vão Os Pontos a 9? Xadrez infinitamente largo, refletido em um espelho esférico.
22 Transformações Projetivas Seja T é um operador linear invertível do R 3 T transforma retas em retas e deixa a origem fixa. Define naturalmente um transformação no plano projetivo. A transformação induzida T é chamada transformação projetiva.
23 Matriz Projetiva A matriz 3 x 3 de uma transformação projetiva representa uma transformação afim bidimensional. M a b p c d q m n s
24 Matriz de Translação Matriz de Translação n y m x y x n m M
25 Transformações Lineares Transformações Lineares dy bx cy ax y x d b c a M
26 Transformação Perspectiva Transformação Perspectiva qy px y x y x q p M
27 Efeito em Um Ponto Ideal Efeito em Um Ponto Ideal qy px y x y x q p M
28 Pontos de Fuga Um ponto ideal pode ser levado em um ponto P do plano afim. Família de retas paralelas que se intersectam no ponto ideal são transformadas numa família de retas incidentes em P. P é chamado de ponto de fuga. Ponto de fuga principal corresponde a uma direção paralela aos eixos coordenados. Imagem de [x,,] ou [,y,].

29 Ponto de Fuga

30 Transformação Perspectiva 2D
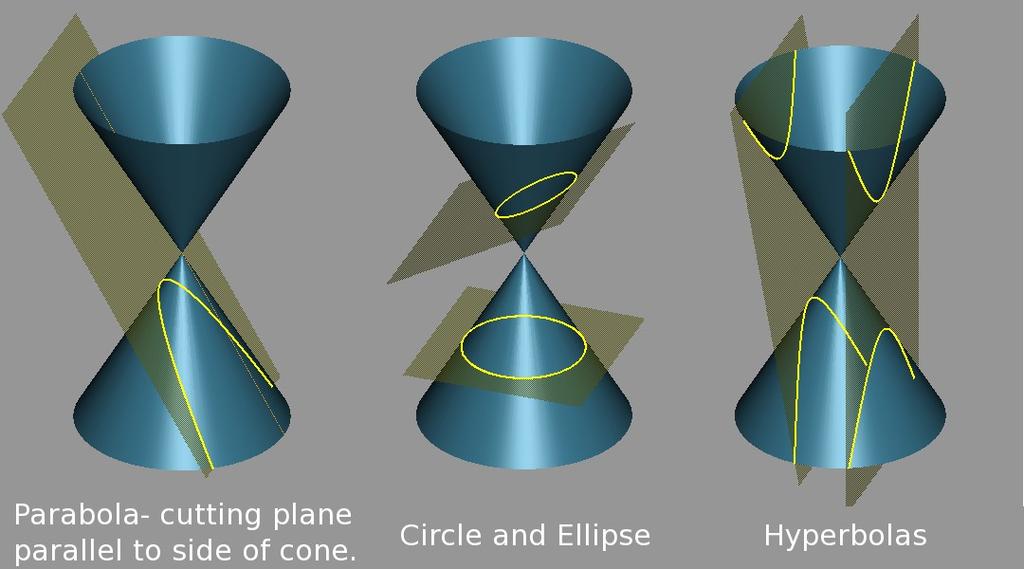
31 Cônicas
32 Círculo - Hipérbola Uma transformação projetiva mapeia uma cônica em uma outra cônica qualquer. A transformação abaixo, leva o círculo x 2 + y 2 w 2 na hipérbole w 2 4 x y x x y w w x y y
33 Espaço Projetivo O modelo analítico do espaço projetivo pode ser introduzido de forma análoga ao RP 2. O espaço projetivo RP 3 é o conjunto das retas do R 4 que passam pela origem. Um ponto do espaço projetivo é definido como: P { ( x, y, z, w);,( x, y, z, w) (,,,)} Denotado por P = [x,y,z,w] em coordenadas homogêneas.
34 Ponto Projetivo Ponto Projetivo Considerando o hiperplano z = como o espaço afim Euclideano mergulhado em RP 3 : Representa a interseção da reta λ(x,y,z,w) com o hiperplano: w = ou (λ = /w). Partição do espaço projetivo em dois conjuntos: / / /, ],,, [ 3 w z w y w x P w RP w z y x P 3 z y x z y x RP
35 Matriz Projetiva Matriz Projetiva Uma transformação projetiva T do RP 3 é uma transformação linear do R 4. A matriz 4 x 4 de uma transformação projetiva representa uma transformação afim tridimensional. s r q p o i f c n h e b m g d a M
36 Transformação Perspectiva Transformação Perspectiva Ponto P do espaço afim é levado no hiperplano w = rz + Se z = -/r, então P é levado em um ponto ideal. Pontos do espaço afim com z = não são afetados. rz z y x z y x r M
37 Ponto de Fuga Principal Ponto de Fuga Principal A imagem do ponto ideal, correspondendo a direção z, tem coordenadas [,, /r, ] Este é o ponto de fuga principal da direção z. Semi-espaço infinito < z é transformado no semi-espaço finito < z /r. r r M
38 Interpretação
39 Mais de Um Ponto de Fuga A transformação perspectiva com 3 pontos de fuga, possui 3 centros de projeção: [-/p,,, ] [, -/q,, ] [,, -/r, ] O mesmo resultado é obtido com a aplicação em cascata de 3 transformações perspectivas, com um único ponto de fuga em cada eixo.
40 Basta Implementar Transformações Com um Único Ponto de Fuga Transformações perspectivas com dois pontos de fuga equivalem a combinação de: rotação ao redor de um eixo perpendicular ao eixo que contém o centro de projeção. transformação perspectiva com um único ponto de fuga. Com duas rotações, obtêm-se transformações com três pontos de fuga.

41 Efeito

42 Projeção Acarreta Perda de Informação
Transformações Geométricas em C.G.
 Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
Curso de CG 2019/1 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
aula6 Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
Curso de CG 2018/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
Projeções. Cap 2 (do livro texto) Aula 6 UFF
 Aula 6 UFF") Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Perspectivas Cap 2 (do livro texto) Aula 7 UFF
 Aula 7 UFF") Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
aula 10 Projeções Planas IC/UFF tela de um museu de Montreal
 aula 10 Projeções Planas IC/UFF - 2016 tela de um museu de Montreal Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D
aula 10 Projeções Planas IC/UFF - 2016 tela de um museu de Montreal Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D
Coordenadas Homogêneas no Plano e no Espaço
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 01 - geometria projetiva e transformações 2D Antonio Oliveira Ricardo Marroquim 1 / 44 laboratório de processamento de imagens tópicos geometria projetiva transformações
Processamento de Imagens CPS755 aula 01 - geometria projetiva e transformações 2D Antonio Oliveira Ricardo Marroquim 1 / 44 laboratório de processamento de imagens tópicos geometria projetiva transformações
aula6 Curvas de Hermite 2016/2 IC / UFF Criadas por Charles Hermite ( ) https://pt.wikipedia.org/wiki/charles_hermite
 https://pt.wikipedia.org/wiki/charles_hermite") Criadas por Charles Hermite (1822-1901) https://pt.wikipedia.org/wiki/charles_hermite aula6 Vetor é : Na matemática - um elemento com de um espaço vetorial Em Física em oposição as grandezas escalares,
Criadas por Charles Hermite (1822-1901) https://pt.wikipedia.org/wiki/charles_hermite aula6 Vetor é : Na matemática - um elemento com de um espaço vetorial Em Física em oposição as grandezas escalares,
aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
Transformações geométricas planas
 9 Transformações geométricas planas Sumário 9.1 Introdução....................... 2 9.2 Transformações no plano............... 2 9.3 Transformações lineares................ 5 9.4 Operações com transformações...........
9 Transformações geométricas planas Sumário 9.1 Introdução....................... 2 9.2 Transformações no plano............... 2 9.3 Transformações lineares................ 5 9.4 Operações com transformações...........
Reconstrução Geométrica a Partir de Imagens TIC /TCC
 Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Aula9 e 10. Projeções Planas. Como representar objetos 3D em dispositivos 2D? 2019/1 IC / UFF. Paginas 91 a 101 livro texto de computacao grafica
 Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 03 - visualizando a planar Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos visualizando a planar discussão dos primeiros 2
Processamento de Imagens CPS755 aula 03 - visualizando a planar Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos visualizando a planar discussão dos primeiros 2
Fundamentos de Processamento Gráfico
 Fundamentos de Processamento Gráfico Helton H. Bíscaro ; Fátima Nunes 19 de março de 2018 Helton H. Bíscaro ; Fátima Nunes Computação Gráfica 19 de março de 2018 1 / 50 Paradigma dos Quatro Universos
Fundamentos de Processamento Gráfico Helton H. Bíscaro ; Fátima Nunes 19 de março de 2018 Helton H. Bíscaro ; Fátima Nunes Computação Gráfica 19 de março de 2018 1 / 50 Paradigma dos Quatro Universos
Reconstrução Geométrica a Partir de Imagens TIC
 Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Universidade Federal de Alagoas Instituto de Matemática. Geometria. Prof. Thales Vieira
 Universidade Federal de Alagoas Instituto de Matemática Geometria Prof. Thales Vieira 2014 Geometria Euclidiana Espaço R n R n = {(x 1,...,x n ); x i 2 R} Operações entre elementos de R n Soma: (x 1,x
Universidade Federal de Alagoas Instituto de Matemática Geometria Prof. Thales Vieira 2014 Geometria Euclidiana Espaço R n R n = {(x 1,...,x n ); x i 2 R} Operações entre elementos de R n Soma: (x 1,x
GEOMETRIA Exercícios
 GEOMETRIA Exercícios Mestrado em Educação - DMFCUL 00/003 1. Determine a equação da circunferência com centro (, 1 e raio 3.. Determine os pontos de intersecção da recta y = com a circunferência do exercício
GEOMETRIA Exercícios Mestrado em Educação - DMFCUL 00/003 1. Determine a equação da circunferência com centro (, 1 e raio 3.. Determine os pontos de intersecção da recta y = com a circunferência do exercício
Reconstrução Geométrica a Partir de Imagens TIC /TCC
 Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aula 5 Conteúdo Geometria Projetiva 3D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aula 5 Conteúdo Geometria Projetiva 3D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Revisão de Álgebra Linear
 Introdução: Revisão de Álgebra Linear Antonio Elias Fabris Instituto de Matemática e Estatística Universidade de São Paulo Map 2121 Aplicações de Álgebra Linear Antonio Elias Fabris (IME-USP) Revisão de
Introdução: Revisão de Álgebra Linear Antonio Elias Fabris Instituto de Matemática e Estatística Universidade de São Paulo Map 2121 Aplicações de Álgebra Linear Antonio Elias Fabris (IME-USP) Revisão de
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Reconstrução Geométrica a Partir de Imagens TIC
 29/3/26 Reconstrução Geométrica a Partir de Imagens TIC-.73 Aula 4 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/26./tic-.73
29/3/26 Reconstrução Geométrica a Partir de Imagens TIC-.73 Aula 4 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/26./tic-.73
1Q1. Considere o ponto A = (1, 2, 3), a reta r : x+1
, a reta r : x+1") Com exceção da Questão 15, em todas as questões da prova considera-se fixado um sistema de coordenadas Σ = (O, E), onde E é uma base ortonormal positiva. 1Q1. Considere o ponto A = (1, 2, 3), a reta r
Com exceção da Questão 15, em todas as questões da prova considera-se fixado um sistema de coordenadas Σ = (O, E), onde E é uma base ortonormal positiva. 1Q1. Considere o ponto A = (1, 2, 3), a reta r
MAE125 Álgebra Linear /2 Turmas EQN/QIN
 MAE25 Álgebra Linear 2 205/2 Turmas EQN/QIN Planejamento (última revisão: 26 de outubro de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na aula seguinte e valem nota Todas as
MAE25 Álgebra Linear 2 205/2 Turmas EQN/QIN Planejamento (última revisão: 26 de outubro de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na aula seguinte e valem nota Todas as
MAT ÁLGEBRA LINEAR PARA ENGENHARIA II 1 a Lista de Exercícios - 2 o semestre de 2006
 MAT 2458 - ÁLGEBRA LINEAR PARA ENGENHARIA II 1 a Lista de Exercícios - 2 o semestre de 2006 1. Sejam u = (x 1, x 2 ) e v = (y 1, y 2 ) vetores de R 2. Para que valores de t R a funcão u, v = x 1 y 1 +
MAT 2458 - ÁLGEBRA LINEAR PARA ENGENHARIA II 1 a Lista de Exercícios - 2 o semestre de 2006 1. Sejam u = (x 1, x 2 ) e v = (y 1, y 2 ) vetores de R 2. Para que valores de t R a funcão u, v = x 1 y 1 +
54 CAPÍTULO 2. GEOMETRIA ANALÍTICA ( ) =
 =") 54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
Marcelo M. Santos DM-IMECC-UNICAMP msantos/
 Universidade Estadual de Maringá - Departamento de Matemática Cálculo Diferencial e Integral: um KIT de Sobrevivência 0 anos c Publicação Eletrônica do KIT http://www.dma.uem.br/kit Identificação de Cônicas
Universidade Estadual de Maringá - Departamento de Matemática Cálculo Diferencial e Integral: um KIT de Sobrevivência 0 anos c Publicação Eletrônica do KIT http://www.dma.uem.br/kit Identificação de Cônicas
Equação Geral do Segundo Grau em R 2
 8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
Capítulo 2. Retas no plano. 1. Retas verticais e não-verticais. Definição 1
 Capítulo 2 Retas no plano O objetivo desta aula é determinar a equação algébrica que representa uma reta no plano. Para isso, vamos analisar separadamente dois tipos de reta: reta vertical e reta não-vertical.
Capítulo 2 Retas no plano O objetivo desta aula é determinar a equação algébrica que representa uma reta no plano. Para isso, vamos analisar separadamente dois tipos de reta: reta vertical e reta não-vertical.
54 CAPÍTULO 2. GEOMETRIA ANALÍTICA ( ) =
 =") 54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
MAE125 Álgebra Linear /1 Turmas EQN/QIN
 MAE25 Álgebra Linear 2 205/ Turmas EQN/QIN Planejamento (última revisão: 0 de junho de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na semana seguinte à aula e valem nota Todas
MAE25 Álgebra Linear 2 205/ Turmas EQN/QIN Planejamento (última revisão: 0 de junho de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na semana seguinte à aula e valem nota Todas
Geometria Analítica - Retas e Planos
 Geometria Analítica - Retas e Planos Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Ângulos Turmas E1 e E3 1 / 10 Objetivos 1 Estudar ângulos entre retas, entre planos e entre retas
Geometria Analítica - Retas e Planos Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Ângulos Turmas E1 e E3 1 / 10 Objetivos 1 Estudar ângulos entre retas, entre planos e entre retas
. f3 = 4 e 1 3 e 2. f2 = e 1 e 3, g 1 = e 1 + e 2 + e 3, 2 g 2 = e 1 + e 2,
 INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-457 Álgebra Linear para Engenharia I Segunda Lista de Exercícios - Professor: Equipe da Disciplina EXERCÍCIOS 1. Dê a matriz de mudança
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-457 Álgebra Linear para Engenharia I Segunda Lista de Exercícios - Professor: Equipe da Disciplina EXERCÍCIOS 1. Dê a matriz de mudança
Universidade Federal da Paraíba - UFPB Centro de Ciências Exatas e da Natureza - CCEN Departamento de Matemática - DM
 Universidade Federal da Paraíba - UFPB Centro de Ciências Exatas e da Natureza - CCEN Departamento de Matemática - DM 3 a Lista de Exercícios de Introdução à Álgebra Linear Professor: Fágner Dias Araruna
Universidade Federal da Paraíba - UFPB Centro de Ciências Exatas e da Natureza - CCEN Departamento de Matemática - DM 3 a Lista de Exercícios de Introdução à Álgebra Linear Professor: Fágner Dias Araruna
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 07 - modelos de câmera Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos matriz de calibração câmera finita câmera projetiva
Processamento de Imagens CPS755 aula 07 - modelos de câmera Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos matriz de calibração câmera finita câmera projetiva
. (1) Se S é o espaço vetorial gerado pelos vetores 1 e,0,1
 Se S é o espaço vetorial gerado pelos vetores 1 e,0,1") QUESTÕES ANPEC ÁLGEBRA LINEAR QUESTÃO 0 Assinale V (verdadeiro) ou F (falso): (0) Os vetores (,, ) (,,) e (, 0,) formam uma base de,, o espaço vetorial gerado por,, e,, passa pela origem na direção de,,
QUESTÕES ANPEC ÁLGEBRA LINEAR QUESTÃO 0 Assinale V (verdadeiro) ou F (falso): (0) Os vetores (,, ) (,,) e (, 0,) formam uma base de,, o espaço vetorial gerado por,, e,, passa pela origem na direção de,,
Transformações Geométricas
 Transformações Geométricas Profª. Alessandra Martins Coelho março/2013 Objetivos Entender os princípios das transformações geométricas do tipo translação, rotação e escalamento. Efetuar transformações
Transformações Geométricas Profª. Alessandra Martins Coelho março/2013 Objetivos Entender os princípios das transformações geométricas do tipo translação, rotação e escalamento. Efetuar transformações
Geometria Analítica. Cônicas. Prof. Vilma Karsburg
 Geometria Analítica Cônicas Prof. Vilma Karsburg Cônicas Sejam duas retas e e g concorrentes em O e não perpendiculares. Considere e fixa e g girar 360 em torno de e, mantendo constante o ângulo entre
Geometria Analítica Cônicas Prof. Vilma Karsburg Cônicas Sejam duas retas e e g concorrentes em O e não perpendiculares. Considere e fixa e g girar 360 em torno de e, mantendo constante o ângulo entre
Geometria Analítica. Cônicas. Prof Marcelo Maraschin de Souza
 Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
0 < c < a ; d(f 1, F 2 ) = 2c
 = 2c") Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
1. Seja θ = ang (r, s). Calcule sen θ nos casos (a) e (b) e cos θ nos casos (c) e (d): = z 3 e s : { 3x + y 5z = 0 x 2y + 3z = 1
. Calcule sen θ nos casos (a) e (b) e cos θ nos casos (c) e (d): = z 3 e s : { 3x + y 5z = 0 x 2y + 3z = 1") 14 a lista de exercícios - SMA0300 - Geometria Analítica Estágio PAE - Alex C. Rezende Medida angular, distância, mudança de coordenadas, cônicas e quádricas 1. Seja θ = ang (r, s). Calcule sen θ nos casos
14 a lista de exercícios - SMA0300 - Geometria Analítica Estágio PAE - Alex C. Rezende Medida angular, distância, mudança de coordenadas, cônicas e quádricas 1. Seja θ = ang (r, s). Calcule sen θ nos casos
P4 de Álgebra Linear I de junho de 2005 Gabarito
 P4 de Álgebra Linear I 25.1 15 de junho de 25 Gabarito 1) Considere os pontos A = (1,, 1), B = (2, 2, 4), e C = (1, 2, 3). (1.a) Determine o ponto médio M do segmento AB. (1.b) Determine a equação cartesiana
P4 de Álgebra Linear I 25.1 15 de junho de 25 Gabarito 1) Considere os pontos A = (1,, 1), B = (2, 2, 4), e C = (1, 2, 3). (1.a) Determine o ponto médio M do segmento AB. (1.b) Determine a equação cartesiana
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 1 a Prova - 1 o semestre de y + az = a (a 2)x + y + 3z = 0 (a 1)y = 1 a
x + y + 3z = 0 (a 1)y = 1 a") MAT457 ÁLGEBRA LINEAR PARA ENGENHARIA I 1 a Prova - 1 o semestre de 018 Questão 1. Se a R, é correto afirmar que o sistema linear y + az = a (a x + y + 3z = 0 (a 1y = 1 a é: (a possível e indeterminado
MAT457 ÁLGEBRA LINEAR PARA ENGENHARIA I 1 a Prova - 1 o semestre de 018 Questão 1. Se a R, é correto afirmar que o sistema linear y + az = a (a x + y + 3z = 0 (a 1y = 1 a é: (a possível e indeterminado
Coordenadas Homogêneas
 Coordenadas Homogêneas André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Coordenadas Homogêneas André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Álgebra Linear /2 Turma 11852
 Álgebra Linear 2 202/2 Turma 852 Planejamento (última revisão: 26/0/202) Os exercícios correspondentes a cada aula serão cobrados oralmente na aula seguinte e valem nota Todas as referências e exercícios
Álgebra Linear 2 202/2 Turma 852 Planejamento (última revisão: 26/0/202) Os exercícios correspondentes a cada aula serão cobrados oralmente na aula seguinte e valem nota Todas as referências e exercícios
4. Curvas Paramétricas e Transformações 2D
 4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
GGM Geometria Analítica e Cálculo Vetorial Geometria Analítica Básica 20/12/2012- GGM - UFF Dirce Uesu
 GGM0016 Geometria Analítica e Cálculo Vetorial Geometria Analítica Básica 0/1/01- GGM - UFF Dirce Uesu CÔNICAS DEFINIÇÃO GEOMÉTRICA Exercício: Acesse o sitio abaixo e use o programa: http://www.professores.uff.br/hjbortol/disciplinas/005.1/gma04096/applets/conic/co
GGM0016 Geometria Analítica e Cálculo Vetorial Geometria Analítica Básica 0/1/01- GGM - UFF Dirce Uesu CÔNICAS DEFINIÇÃO GEOMÉTRICA Exercício: Acesse o sitio abaixo e use o programa: http://www.professores.uff.br/hjbortol/disciplinas/005.1/gma04096/applets/conic/co
Mudança de Coordenadas
 Mudanças de Coordenadas Mudança de Coordenadas A origem O = (0, 0, 0) e os vetores i, j, k da base canônica de R determinam um sistema de coordenadas: se as coordenadas de um ponto no espaço são (x, y,
Mudanças de Coordenadas Mudança de Coordenadas A origem O = (0, 0, 0) e os vetores i, j, k da base canônica de R determinam um sistema de coordenadas: se as coordenadas de um ponto no espaço são (x, y,
CARGA HORÁRIA SEMANAL: 06 horas
 PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
CM005 Álgebra Linear Lista 3
 CM005 Álgebra Linear Lista 3 Alberto Ramos Seja T : V V uma transformação linear. Se temos que T v = λv, v 0, para λ K. Dizemos que λ é um autovalor de T e v autovetor de T associado a λ. Observe que λ
CM005 Álgebra Linear Lista 3 Alberto Ramos Seja T : V V uma transformação linear. Se temos que T v = λv, v 0, para λ K. Dizemos que λ é um autovalor de T e v autovetor de T associado a λ. Observe que λ
Geometria Analítica Exercícios Cônicas em posição geral
 Geometria Analítica Exercícios Cônicas em posição geral Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Soluções Turmas E1 e E3 1 / 16 Resolução dos exercícios da aula 15 Classique
Geometria Analítica Exercícios Cônicas em posição geral Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Soluções Turmas E1 e E3 1 / 16 Resolução dos exercícios da aula 15 Classique
aula6 2018/2 IC / UFF Como representar objetos 3D em dispositivos 2D?
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p 2018/2 IC / UFF aula6: Projeções Planas Material disponível
http://computacaografica.ic.uff.br/conteudocap2.html aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p 2018/2 IC / UFF aula6: Projeções Planas Material disponível
Ga no plano 1. GA no plano. Prof. Fernando Carneiro Rio de Janeiro, Outubro de u v = aa + bb.
 Ga no plano 1 GA no plano Prof. Fernando Carneiro Rio de Janeiro, Outubro de 015 1 Introdução Estudaremos as retas no plano euclidiano bidimensional e uma interessante aplicação, que recebe o nome de programação
Ga no plano 1 GA no plano Prof. Fernando Carneiro Rio de Janeiro, Outubro de 015 1 Introdução Estudaremos as retas no plano euclidiano bidimensional e uma interessante aplicação, que recebe o nome de programação
O Plano no Espaço. Sumário
 17 Sumário 17.1 Introdução....................... 2 17.2 Equações paramétricas do plano no espaço..... 2 17.3 Equação cartesiana do plano............. 15 17.4 Exercícios........................ 21 1 Unidade
17 Sumário 17.1 Introdução....................... 2 17.2 Equações paramétricas do plano no espaço..... 2 17.3 Equação cartesiana do plano............. 15 17.4 Exercícios........................ 21 1 Unidade
Notas de Aula - Fascículo 03 Transformações projetivas do plano
 Tópicos em Computação Gráfica Notas de Aula - Fascículo 03 Transformações projetivas do plano Jorge Stolfi c 2009 Jorge Stolfi - Universidade Estadual de Campinas. É permitida a reprodução ou divulgação,
Tópicos em Computação Gráfica Notas de Aula - Fascículo 03 Transformações projetivas do plano Jorge Stolfi c 2009 Jorge Stolfi - Universidade Estadual de Campinas. É permitida a reprodução ou divulgação,
Geometria Analítica II - Aula 5 108
 Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
A primeira coisa a fazer é saber quais são as equações das curvas quando elas já se encontram na melhor
 Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
1. Em cada caso, obtenha a equação e esboce o grá co da circunferência.
 3. AS CÔNICAS CÁLCULO VETORIAL - 2017.2 3.1 A circunferência 1. Em cada caso, obtenha a equação e esboce o grá co da circunferência. (a) Centro C ( 2; 1) e raio r = 5: (b) Passa pelos pontos A (5; 1) ;
3. AS CÔNICAS CÁLCULO VETORIAL - 2017.2 3.1 A circunferência 1. Em cada caso, obtenha a equação e esboce o grá co da circunferência. (a) Centro C ( 2; 1) e raio r = 5: (b) Passa pelos pontos A (5; 1) ;
Geometria Analítica. Estudo do Plano. Prof Marcelo Maraschin de Souza
 Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Unidade 14 - Operadores lineares e mudança de base nos espaços euclidianos bi e tri-dimensionais
 MA33 - Introdução à Álgebra Linear Unidade 14 - Operadores lineares e mudança de base nos espaços euclidianos bi e tri-dimensionais A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa PROFMAT -
MA33 - Introdução à Álgebra Linear Unidade 14 - Operadores lineares e mudança de base nos espaços euclidianos bi e tri-dimensionais A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa PROFMAT -
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 6. Projeções
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de f 1 = 2 e 1 e 2 e 3,
 MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de 2015 1 Sendo E = { e 1 e 2 e 3 } F = { f 1 f 2 f 3 } bases com: f 1 = 2 e 1 e 3 f 2 = e 2 + 2 e 3 f 3 = 7 e 3 e w = e
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de 2015 1 Sendo E = { e 1 e 2 e 3 } F = { f 1 f 2 f 3 } bases com: f 1 = 2 e 1 e 3 f 2 = e 2 + 2 e 3 f 3 = 7 e 3 e w = e
CARGA HORÁRIA SEMANAL: 06 horas
 PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
CARGA HORÁRIA SEMANAL: 06 horas
 PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 09 - single-view final Antonio Oliveira Ricardo Marroquim 1 / 25 laboratório de processamento de imagens tópicos pontos e retas de fuga métricas afim em uma foto calibrando
Processamento de Imagens CPS755 aula 09 - single-view final Antonio Oliveira Ricardo Marroquim 1 / 25 laboratório de processamento de imagens tópicos pontos e retas de fuga métricas afim em uma foto calibrando
1 Segmentos orientados e vetores, adição e multiplicação
 MAP2110 Modelagem e Matemática 1 o Semestre de 2007 Resumo 1 - Roteiro de estudos - 07/05/2007 Espaços vetoriais bi e tri-dimensionais (plano ou espaço bidimensional E 2, e espaço tridimensional E 3 )
MAP2110 Modelagem e Matemática 1 o Semestre de 2007 Resumo 1 - Roteiro de estudos - 07/05/2007 Espaços vetoriais bi e tri-dimensionais (plano ou espaço bidimensional E 2, e espaço tridimensional E 3 )
Nas questões 1, 3, 4, 11, 12, 13, 15 e 17 considera-se fixado um sistema de coordenadas Σ = (O, E) em E 3, onde E é uma base ortonormal
 em E 3, onde E é uma base ortonormal") Nas questões 1, 3, 4, 11, 12, 13, 15 e 17 considera-se fixado um sistema de coordenadas Σ = (O, E) em E 3, onde E é uma base ortonormal positiva de V 3. 1Q1. Seja m R não nulo e considere as retas: r :
Nas questões 1, 3, 4, 11, 12, 13, 15 e 17 considera-se fixado um sistema de coordenadas Σ = (O, E) em E 3, onde E é uma base ortonormal positiva de V 3. 1Q1. Seja m R não nulo e considere as retas: r :
3.2 Determine a equação da circunferência de raio 5, tangente à reta 3x +4y =16no ponto A (4, 1).
.") 3.1 Obtenha a equação e esboce o gráfico da circunferência caracterizada por: (a) Centro C (, 1) eraior =5; (b) Passa pelos pontos A (1, ),B(1, 1) e C (, 3) ; (c) Inscrita no triângulo determinado pelas
3.1 Obtenha a equação e esboce o gráfico da circunferência caracterizada por: (a) Centro C (, 1) eraior =5; (b) Passa pelos pontos A (1, ),B(1, 1) e C (, 3) ; (c) Inscrita no triângulo determinado pelas
(e) apenas as afirmações (II) e (III) são verdadeiras.
 apenas as afirmações (II) e (III) são verdadeiras.") Nas questões da prova em que está fixado um sistema de coordenadas Σ = (O, E, quando for necessário, considera-se que E é uma base ortonormal positiva. 1Q 1. Seja V um espaço vetorial e x 1, x 2,, x q,
Nas questões da prova em que está fixado um sistema de coordenadas Σ = (O, E, quando for necessário, considera-se que E é uma base ortonormal positiva. 1Q 1. Seja V um espaço vetorial e x 1, x 2,, x q,
Álgebra Linear I - Aula Bases Ortonormais e Matrizes Ortogonais
 Álgebra Linear I - Aula 19 1. Bases Ortonormais e Matrizes Ortogonais. 2. Matrizes ortogonais 2 2. 3. Rotações em R 3. Roteiro 1 Bases Ortonormais e Matrizes Ortogonais 1.1 Bases ortogonais Lembre que
Álgebra Linear I - Aula 19 1. Bases Ortonormais e Matrizes Ortogonais. 2. Matrizes ortogonais 2 2. 3. Rotações em R 3. Roteiro 1 Bases Ortonormais e Matrizes Ortogonais 1.1 Bases ortogonais Lembre que
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
Vetores e Geometria Analítica
 Vetores e Geometria Analítica ECT2102 Prof. Ronaldo Carlotto Batista 4 de maio de 2016 Círculo Denição Círculo é o conjunto de pontos P (x, y) a uma distância a, chamada de raio, de um ponto C (x o, y
Vetores e Geometria Analítica ECT2102 Prof. Ronaldo Carlotto Batista 4 de maio de 2016 Círculo Denição Círculo é o conjunto de pontos P (x, y) a uma distância a, chamada de raio, de um ponto C (x o, y
Introdução ao Processamento e Síntese de imagens - Projeções
 Introdução ao Processamento e Síntese de imagens - Projeções Júlio Kiyoshi Hasegawa Fontes: Esperança e Cavalcanti (22) (UFRJ) e Traina e Oliveira (24) (USP) Antonio Maria Garcia Tommaselli - notas de
Introdução ao Processamento e Síntese de imagens - Projeções Júlio Kiyoshi Hasegawa Fontes: Esperança e Cavalcanti (22) (UFRJ) e Traina e Oliveira (24) (USP) Antonio Maria Garcia Tommaselli - notas de
Matrizes Semelhantes e Matrizes Diagonalizáveis
 Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Conceitos Primitivos: são conceitos adotados sem definição.
 Geometria Plana Geometria Espacial Conceitos Primitivos: são conceitos adotados sem definição. 1. Ponto P Características: Não possui dimensão Sua representação geométrica é indicada por letra maiúscula
Geometria Plana Geometria Espacial Conceitos Primitivos: são conceitos adotados sem definição. 1. Ponto P Características: Não possui dimensão Sua representação geométrica é indicada por letra maiúscula
Sumário. VII Geometria Analítica Jorge Delgado Katia Frensel Lhaylla Crissaff
 1 Coordenadas no plano 1 1.1 Introdução........................................ 2 1.2 Coordenada e distância na reta............................ 3 1.3 Coordenadas no plano.................................
1 Coordenadas no plano 1 1.1 Introdução........................................ 2 1.2 Coordenada e distância na reta............................ 3 1.3 Coordenadas no plano.................................
Geometria Analítica. Geometria Analítica 28/08/2012
 Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Equações paramétricas das cônicas
 Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
OS ESPINORES foram introduzidos para obter todas as representações
 Sobre uma extensão de cálculo espinorial (I) Mario Schönberg OS ESPINORES foram introduzidos para obter todas as representações lineares irredutíveis do grupo das rotações e reviramentos de um espaço euclidiano.
Sobre uma extensão de cálculo espinorial (I) Mario Schönberg OS ESPINORES foram introduzidos para obter todas as representações lineares irredutíveis do grupo das rotações e reviramentos de um espaço euclidiano.
MINISTÉRIO DA EDUCAÇÃO CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS CONSELHO DE GRADUAÇÃO
 DISCIPLINA: GEOMETRIA ANALÍTICA E ÁLGEBRA VETORIAL CÓDIGO: 2DB.004 VALIDADE: Início: 01/2013 Término: Eixo: Matemática Carga Horária: Total: 75 horas/ 90 horas-aula Semanal: 06 aulas Créditos: 6 Modalidade:
DISCIPLINA: GEOMETRIA ANALÍTICA E ÁLGEBRA VETORIAL CÓDIGO: 2DB.004 VALIDADE: Início: 01/2013 Término: Eixo: Matemática Carga Horária: Total: 75 horas/ 90 horas-aula Semanal: 06 aulas Créditos: 6 Modalidade:
PLANO DE ENSINO CURSO ENGENHARIA AMBIENTAL MATRIZ 519
 Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Campus Medianeira PLANO DE ENSINO CURSO ENGENHARIA AMBIENTAL MATRIZ 519 FUNDAMENTAÇÃO LEGAL Resolução 075/09 COEPP, de 21 de agosto de
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Campus Medianeira PLANO DE ENSINO CURSO ENGENHARIA AMBIENTAL MATRIZ 519 FUNDAMENTAÇÃO LEGAL Resolução 075/09 COEPP, de 21 de agosto de
Álgebra Linear I - Lista 10. Matrizes e Transformações lineares. Respostas
 Álgebra Linear I - Lista 1 Matrizes e Transformações lineares Respostas 1 Sejam A e B matrizes quadradas do mesmo tamanho Dê um exemplo onde (A + B 2 A 2 + 2A B + B 2 Complete: (A + B 2 = A 2 + B 2 +?
Álgebra Linear I - Lista 1 Matrizes e Transformações lineares Respostas 1 Sejam A e B matrizes quadradas do mesmo tamanho Dê um exemplo onde (A + B 2 A 2 + 2A B + B 2 Complete: (A + B 2 = A 2 + B 2 +?
MAT 112 Turma e Vetores e Geometria. Prova SUB 05 de julho de 2018
 MAT 112 Turma 2017146 e 2017134 Vetores e Geometria Prof. Paolo Piccione Prova SUB 05 de julho de 2018 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale
MAT 112 Turma 2017146 e 2017134 Vetores e Geometria Prof. Paolo Piccione Prova SUB 05 de julho de 2018 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale
MAT 112 Turma e Vetores e Geometria. Prova SUB 05 de julho de 2018
 MAT 112 Turma 2017146 e 2017134 Vetores e Geometria Prof. Paolo Piccione Prova SUB 05 de julho de 2018 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale
MAT 112 Turma 2017146 e 2017134 Vetores e Geometria Prof. Paolo Piccione Prova SUB 05 de julho de 2018 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale
Transformação geométrica
 Transformação geométrica Noção de transformação geométrica O termo transformação é um termo muito usado na geometria mas é sinónimo de função, também usado noutras áreas. Uma função é uma correspondência
Transformação geométrica Noção de transformação geométrica O termo transformação é um termo muito usado na geometria mas é sinónimo de função, também usado noutras áreas. Uma função é uma correspondência
dosteoremasdepascaledepappus
 Uma demonstração algébrica dosteoremasdepascaledepappus Um dos teoremas mais bonitos da Matemática é o teorema de Pascal: Teorema de Pascal Dados seis pontos A, B, C, D, E e F sobre uma circunferência,
Uma demonstração algébrica dosteoremasdepascaledepappus Um dos teoremas mais bonitos da Matemática é o teorema de Pascal: Teorema de Pascal Dados seis pontos A, B, C, D, E e F sobre uma circunferência,
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO. CURSO Engenharia Elétrica MATRIZ 548
 Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 00/11, aprovado pela Resolução n.
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 00/11, aprovado pela Resolução n.
Exercícios de Geometria Analítica - Prof. Ademir
 Exercícios de Geometria nalítica - Prof. demir Vetores 1. onsidere o triângulo, onde = (1, 1, 1), = (2, 1, 0) e = (3, 2, 3). Verifique que este triângulo é retângulo, diga qual vértice contém o ângulo
Exercícios de Geometria nalítica - Prof. demir Vetores 1. onsidere o triângulo, onde = (1, 1, 1), = (2, 1, 0) e = (3, 2, 3). Verifique que este triângulo é retângulo, diga qual vértice contém o ângulo
LISTA 5 DE GEOMETRIA RIEMANNIANA 2007
 LISTA 5 DE GEOMETRIA RIEMANNIANA 2007 RICARDO SA EARP (1) Considere S 3 = {(z 1, z 2 ) C 2 ; z 1 2 + z 2 2 = 1}. seja q um inteiro q > 1. Seja Γ = {1, e 2π1/q,..., e 2π(q 1)/q }, o grupo finito agindo
LISTA 5 DE GEOMETRIA RIEMANNIANA 2007 RICARDO SA EARP (1) Considere S 3 = {(z 1, z 2 ) C 2 ; z 1 2 + z 2 2 = 1}. seja q um inteiro q > 1. Seja Γ = {1, e 2π1/q,..., e 2π(q 1)/q }, o grupo finito agindo
GEOMETRIA ANALÍTICA Respostas da 10 a Lista de exercícios. a) x 2 = 8y b) y 2 = 8x c) x 2 = 12y. d) y 2 = 12x e) x 2 = 4y f) 3x 2 + 4y = 0
 x 2 = 8y b) y 2 = 8x c) x 2 = 12y. d) y 2 = 12x e) x 2 = 4y f) 3x 2 + 4y = 0") UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERICANA Instituto Latino-Americano de Ciências da Vida e Da Natureza Centro Interdisciplinar de Ciências da Natureza 1. GEOMETRIA ANALÍTICA Respostas da 10 a
UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERICANA Instituto Latino-Americano de Ciências da Vida e Da Natureza Centro Interdisciplinar de Ciências da Natureza 1. GEOMETRIA ANALÍTICA Respostas da 10 a
Unidade 22 - Teorema espectral para operadores simétricos, reconhecimento de cônicas. A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa
 MA33 - Introdução à Álgebra Linear Unidade 22 - Teorema espectral para operadores simétricos, reconhecimento de cônicas A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa PROFMAT - SBM 10 de agosto
MA33 - Introdução à Álgebra Linear Unidade 22 - Teorema espectral para operadores simétricos, reconhecimento de cônicas A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa PROFMAT - SBM 10 de agosto
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Álgebra Linear e suas Aplicações Notas de Aula. Petronio Pulino = Q
 Álgebra Linear e suas Aplicações Notas de Aula Petronio Pulino 1 3 4 3 1 0 4 0 1 = Q 4 1 6 Qt Q t Q = 1 1 1 PULINUS Álgebra Linear e suas Aplicações Notas de Aula Petronio Pulino Departamento de Matemática
Álgebra Linear e suas Aplicações Notas de Aula Petronio Pulino 1 3 4 3 1 0 4 0 1 = Q 4 1 6 Qt Q t Q = 1 1 1 PULINUS Álgebra Linear e suas Aplicações Notas de Aula Petronio Pulino Departamento de Matemática