Transformações Geométricas
|
|
|
- Ivan Palha Peixoto
- 7 Há anos
- Visualizações:
Transcrição
1 Transformações Geométricas Profª. Alessandra Martins Coelho março/2013
2 Objetivos Entender os princípios das transformações geométricas do tipo translação, rotação e escalamento. Efetuar transformações geométricas utilizando coordenadas homogêneas.
3 Fundamentos Transformações geométricas envolvem operações com vetores e matrizes, do tipo soma e multiplicação, além de conhecimentos básicos de álgebra e geometria.
4 O que é uma matriz? A matriz é um conjunto de elementos, organizados em linhas e colunas.
5 Operações Básicas Adição, subtração, multiplicação
6 AB=BA? Multiplicação
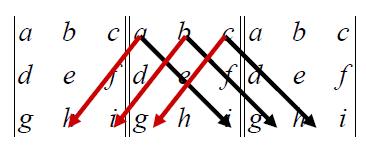
7 Multiplicação AB=BA? A multiplicação não é comutativa
8 AI = A AA -1 = I Identidade
9 Inversa
10 Inversa L1 = L1 + L2*(-1) L2 = L2 + L1*(-1) L3 = L2+ L1*(-2)
11 Inversa L3=L3+L2*(-3) L3=L3*(-1) L2 = L2 + L3*(-1)
12 Inversa
13 Determinante
14 Determinante
15 Matrizes Homogêneas Problema: como incluir translações em transformações (e fazer transformações em perspectiva) Solução: adicionar uma dimensão extra
16 Bases ortonormais X, Y, Z é uma base ortonormal. Podemos descrever qualquer ponto 3D como uma combinação linear destes vetores.
17 Transformações básicas - OpenGL Translação gltranslatef(dx, dy, dz); Escalamento glscalef(sx, sy, sz); Rotação glrotatef(ang, x, y, z);
18 Para facilitar a visualização dos processos geométricos envolvidos, vamos iniciar o nosso estudo de transformações no R 2
19 uma transformação T no R 2 é uma função que associa a cada ponto p do plano um novo ponto p' tal que: p'= T(p) ou
20 Transformação no R²
21 Um exemplo de uma transformação genérica pode ser ilustrada por
22 Uma transformação é dita linear quando a transformada de uma combinação linear for sempre igual à combinação linear dos vetores transformados. para quaisquer p 1, p 2 pertencentes ao plano ou ao espaço e quaisquer que sejam a 1, a 2 pertencentes aos reais quaisquer que sejam a1, a2 pertencentes aos reais, T (a 1 p 1 + a 2 p 2 ) = a 1 T( p 1 ) + a 2 T(p 2 ) T(p)=Ap
23 Para determinar a matriz associada basta observar que se tomarmos
24 Basta Aplicar T aos Vetores da Base ) ( ) ( ) ( (0,0,1,0,..,0), = = = = = = = n i i i i n i i i i n i i u v T v u T v T u v u v = = ' 23 ' 13 ' 32 ' 22 ' 12 ' 31 ' 21 ' 11 ' )) ( ), ( ), ( ( ) ( v v v u u u u u u u u u v v v u T u T u T v T
25 Transformações Lineares Bidimensionais A origem é o único ponto fixo. Logo, a translação não é uma transformação linear. São representadas por matrizes 2 x 2. T = a b c d x y = ax bx + + cy dy
26 Translação É uma operação que desloca pontos em uma determinada direção. Define-se através da equação: P =P+T tal que, para o caso 2D Onde: x, y são os pontos originais; x, y são os pontos deslocados; e dx, dy correspondem ao deslocamento nas direções x e y, respectivamente.
27 Exemplo 2D Translação
28 Escala Escalamento pode tornar um objeto maior ou menor. A equação P =S.P define essa operação. tal que, para o caso 2D
29 Exemplo
30 Rotação Rotaciona (gira) um objeto de um determinado ângulo θ. É dada pela equação: P = R.P tal que, para o caso 2D.
31 Exemplo
32 Rotação/Escala as operações de escalamento e rotação também deslocam o objeto, pois foram definidas a partir de um ponto na origem. para que não ocorra translação desnecessária no objeto é preciso realizar as seguintes etapas:

33 Rotação/Escala
34 Coordenadas homogêneas As operações matriciais diferem entre adição (translação) e multiplicação (rotação/escala). P = R P P = S P P = P + T Uma forma de tratar as transformações através da mesma operação é expressar os pontos em COORDENADAS HOMOGÊNEAS.
35 Coordenadas homogêneas Em coordenadas homogêneas, uma terceira coordenada é adicionada (caso 2D) E as transformações são escritas na forma
36 Transformações 3D Matrizes de transformações para o caso 3D
37 Transformações 3D
38 Transformações 3D Z Y X

39 Outras Transformações 3D Cisalhamento Reflexão
40 Transformações - OpenGL O OpenGL trabalha com matrizes de transformações As operações são efetuadas via multiplicação de matrizes, de acordo com o estado existente Portanto, é necessário carregar a matriz identidade glloadidentity();
41 OpenGL trabalha com matrizes de transformações... Utiliza-se o comando glmatrixmode Parâmetro GL_PROJECTION antes dos comandos que especificam o tipo de projeção (glortho, por exemplo). Parâmetro GL_MODELVIEW antes de transformações geométricas.
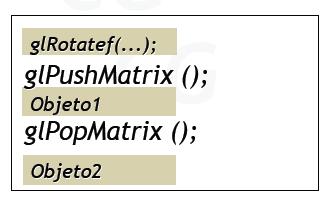
42 Uma transformação pode alterar todos os objetos na sequência: não desejado, dependendo da aplicação OpenGL: escopo das transformações... São utilizados comando glpushmatrix() e glpopmatrix() para definir início e fim do bloco de objetos onde será(ão) efetuada(s) a(s) transformação(ões).
43
; glpopmatrix(); /* Cubo 2 */ glpushmatrix(); glrotatef (25.0, 0.0, 0.0, 1.0); gltranslatef (2.0, 0.0, 0.0); glscalef (2.0, 1.0, 4.0); glutwirecube (1.")
44 void display(void){ glclear (GL_COLOR_BUFFER_BIT); glpushmatrix(); /* Cubo 1 */ glpushmatrix(); gltranslatef (-2.0, 0.0, 0.0); glscalef (2.0, 1.0, 4.0); glutwirecube (1.0); glpopmatrix(); /* Cubo 2 */ glpushmatrix(); glrotatef (25.0, 0.0, 0.0, 1.0); gltranslatef (2.0, 0.0, 0.0); glscalef (2.0, 1.0, 4.0); glutwirecube (1.0); glpopmatrix(); /* Cubo 3 */ glpushmatrix(); gltranslatef (0.0, 2.0, 0.0); glscalef (2.0, 1.0, 4.0); glutwirecube (1.0); glpopmatrix(); /* Cubo 4 */ glpushmatrix(); gltranslatef (0.0, -2.0, 0.0); glscalef (2.0, 1.0, 4.0); glutwirecube (1.0); glpopmatrix(); glpopmatrix(); glutswapbuffers();
45 Referências GOMES, Jonas; VELHO, Luiz. Fundamentos da Computação gráfica. Rio de Janeiro: IMPA, GUHA, S. Computer Graphics through OpenGL: from theory to experiments Chapman & Hall/CRC. Taylor & Francis Group, 2011 CARVALHO. M. A. G. Computação Gráfica: Transformações Geométricas. Notas de Aula Disponível em: 09_Transformacoes.pdf. Acesso em: 18 fev 2013.
Matriz de transformação
 OpenGL Matriz de transformação geométricas no espaço - representadas por matrizes; pilha de matrizes de transformação - lembrar a seqüência de transformações realizadas; glpushmatrix() - insere a matriz
OpenGL Matriz de transformação geométricas no espaço - representadas por matrizes; pilha de matrizes de transformação - lembrar a seqüência de transformações realizadas; glpushmatrix() - insere a matriz
Transformações Geométricas
 Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
 Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Transformações (Cap 4.3, 4.4 e 4.6 a 4.10)
") 4.6 a 4.) Transformações (Cap 4.3, 4.4 e 4.6 a 4.) Instituto Superior Técnico, 26/27 Sumário Revisões Transformações Elementares Coordenadas Homogéneas Composição de Transformações Transformações em OpenGL
4.6 a 4.) Transformações (Cap 4.3, 4.4 e 4.6 a 4.) Instituto Superior Técnico, 26/27 Sumário Revisões Transformações Elementares Coordenadas Homogéneas Composição de Transformações Transformações em OpenGL
Transformações geométricas
 Módulo 7 Sistemas Gráficos e Interação Instituto Superior de Engenharia do Porto Filipe Pacheco ffp@isep.ipp.pt Transformações geométricas SGRAI 2017/18 DEI-ISEP 97 Conteúdo Tipos de transformações Model/View
Módulo 7 Sistemas Gráficos e Interação Instituto Superior de Engenharia do Porto Filipe Pacheco ffp@isep.ipp.pt Transformações geométricas SGRAI 2017/18 DEI-ISEP 97 Conteúdo Tipos de transformações Model/View
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 6. Projeções
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Transformações Geométricas
 Transformações Geométricas Computação Gráfica Motivação! Transformações geométricas! Translação, Rotação, Reflexão! Variação de Tamanho (scaling), Cisalhamento (shearing)! Projecção Ortogonal, Projecção
Transformações Geométricas Computação Gráfica Motivação! Transformações geométricas! Translação, Rotação, Reflexão! Variação de Tamanho (scaling), Cisalhamento (shearing)! Projecção Ortogonal, Projecção
Transformações de Pontos. Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles
 Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
Computação Gráfica. Licenciatura em Engenharia Informática e de Computadores Taguspark / Alameda. Primeiro Teste 17 de Março de 2012
 Computação Gráfica Licenciatura em Engenharia Informática e de Computadores Taguspark / Alameda Primeiro Teste 7 de Março de O teste tem a duração de h, tolerância incluída. Responda às questões unicamente
Computação Gráfica Licenciatura em Engenharia Informática e de Computadores Taguspark / Alameda Primeiro Teste 7 de Março de O teste tem a duração de h, tolerância incluída. Responda às questões unicamente
Prof. Fernando V. Paulovich 3 de maio de SCC Computação Gráca
 Transformações Geométricas 3D SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Transformações Geométricas 3D SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Transformações geométricas no plano e no espaço
 Transformações geométricas no plano e no espaço Sistemas de Coordenadas Sistemas de Referência com finalidades específicas: SRU Sistema de Referência do Universo SRO Sistema de Referência do Objeto SRN
Transformações geométricas no plano e no espaço Sistemas de Coordenadas Sistemas de Referência com finalidades específicas: SRU Sistema de Referência do Universo SRO Sistema de Referência do Objeto SRN
4. Curvas Paramétricas e Transformações 2D
 4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
Coordenadas Homogêneas no Plano e no Espaço
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Computação Gráfica OpenGL 05 3D
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica OpenGL 05 3D Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica OpenGL 05 3D Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti
aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
Transformações Geométricas Grafos de Cena
 Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Curso de CG 2019/1 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
Curso de CG 2018/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
Computação Gráfica OpenGl 03
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica OpenGl 03 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica OpenGl 03 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti
aula6 Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
Computação Gráfica Transformações Geométrica no Plano e no Espaço
 Computação Gráfica Transformações Geométrica no Plano e no Espaço Tomás Antônio C. Badan 1 Pontos e Vetores Ponto: Posição especificada por uma coordenada em um sistema de referência Depende do sistema
Computação Gráfica Transformações Geométrica no Plano e no Espaço Tomás Antônio C. Badan 1 Pontos e Vetores Ponto: Posição especificada por uma coordenada em um sistema de referência Depende do sistema
Transformações Geométricas 2D e 3D
 UNIVERSIDADE DE SÃO PAULO - USP Instituto de Ciências Matemáticas e de Computação ICMC Departamento de Ciências de Computação SCC Seminário para a Disciplina SCE 5799 Computação Gráfica Profa. Dra. Rosane
UNIVERSIDADE DE SÃO PAULO - USP Instituto de Ciências Matemáticas e de Computação ICMC Departamento de Ciências de Computação SCC Seminário para a Disciplina SCE 5799 Computação Gráfica Profa. Dra. Rosane
Transformações Geométricas em C.G.
 Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
ROBÓTICA (ROB74) AULA 2. TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug
 AULA 2. TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug PROGRAMA Transformações Geométricas e Coordenadas Homogêneas Notações Introdutórias Vetores, matrizes, pontos
ROBÓTICA (ROB74) AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug PROGRAMA Transformações Geométricas e Coordenadas Homogêneas Notações Introdutórias Vetores, matrizes, pontos
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Transformações Geométricas
 Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
aula6 Curvas de Hermite 2016/2 IC / UFF Criadas por Charles Hermite ( ) https://pt.wikipedia.org/wiki/charles_hermite
 https://pt.wikipedia.org/wiki/charles_hermite") Criadas por Charles Hermite (1822-1901) https://pt.wikipedia.org/wiki/charles_hermite aula6 Vetor é : Na matemática - um elemento com de um espaço vetorial Em Física em oposição as grandezas escalares,
Criadas por Charles Hermite (1822-1901) https://pt.wikipedia.org/wiki/charles_hermite aula6 Vetor é : Na matemática - um elemento com de um espaço vetorial Em Física em oposição as grandezas escalares,
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Nota de aula: Transformações Lineares
 Nota de aula: Transformações Lineares Prof. Rebello out/99 rev. mai/0 São aplicações entre espaços vetoriais, isto é, funções onde tanto o domínio como o contra domínio são espaços vetoriais, portanto
Nota de aula: Transformações Lineares Prof. Rebello out/99 rev. mai/0 São aplicações entre espaços vetoriais, isto é, funções onde tanto o domínio como o contra domínio são espaços vetoriais, portanto
Projeções e Transformações em 3D
 Projeções e Transformações em 3D Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário O que são projeções Conversão 3D-2D Tipos de Projeção Projeções Paralelas Projeções Isométricas
Projeções e Transformações em 3D Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário O que são projeções Conversão 3D-2D Tipos de Projeção Projeções Paralelas Projeções Isométricas
Modelos Geométricos Transformações
 Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
PLANO DE ENSINO E APRENDIZAGEM
 SERVIÇO PÚBLICO FEDERAL UNIVERSIDADE FEDERAL DO PARÁ INSTITUTO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE LICENCIATURA PLENA EM MATEMÁTICA PARFOR PLANO E APRENDIZAGEM I IDENTIFICAÇÃO: PROFESSOR (A) DA DISCIPLINA:
SERVIÇO PÚBLICO FEDERAL UNIVERSIDADE FEDERAL DO PARÁ INSTITUTO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE LICENCIATURA PLENA EM MATEMÁTICA PARFOR PLANO E APRENDIZAGEM I IDENTIFICAÇÃO: PROFESSOR (A) DA DISCIPLINA:
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2015 Ensino Técnico Etec Etec: PAULINO BOTELHO Código: 091 Município: São Carlos Eixo Tecnológico: Informação e Comunicação Habilitação Profissional: Técnico em Programação de
Plano de Trabalho Docente 2015 Ensino Técnico Etec Etec: PAULINO BOTELHO Código: 091 Município: São Carlos Eixo Tecnológico: Informação e Comunicação Habilitação Profissional: Técnico em Programação de
Introdução à Computação Gráfica
 Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Computação Gráfica. Prof. MSc. André Yoshimi Kusumoto
 Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Transformações Geométricas São operações que podem ser utilizadas visando a alteração de algumas características como posição,
Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Transformações Geométricas São operações que podem ser utilizadas visando a alteração de algumas características como posição,
aula6 2018/2 IC / UFF Como representar objetos 3D em dispositivos 2D?
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p 2018/2 IC / UFF aula6: Projeções Planas Material disponível
http://computacaografica.ic.uff.br/conteudocap2.html aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p 2018/2 IC / UFF aula6: Projeções Planas Material disponível
Nota de aula: Transformações Lineares
 Nota de aula: Transformações Lineares Prof. Rebello out/99 rev. out/ São aplicações entre espaços vetoriais, isto é, funções onde tanto o domínio como o contra domínio são espaços vetoriais, portanto todas
Nota de aula: Transformações Lineares Prof. Rebello out/99 rev. out/ São aplicações entre espaços vetoriais, isto é, funções onde tanto o domínio como o contra domínio são espaços vetoriais, portanto todas
Coordenadas Homogêneas
 Coordenadas Homogêneas André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Coordenadas Homogêneas André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC
 Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC Introdução à Mecânica do Contínuo Tensores Professor: Márcio André Araújo Cavalcante
Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC Introdução à Mecânica do Contínuo Tensores Professor: Márcio André Araújo Cavalcante
Transformações Geométricas e Animação
 Transformações Geométricas e Animação SCC0250/0650 - Computação Gráfica Prof. Rosane Minghim https://edisciplinas.usp.br/course/view.php?id=61213 https://edisciplinas.usp.br/course/view.php?id=61210 P.A.E.
Transformações Geométricas e Animação SCC0250/0650 - Computação Gráfica Prof. Rosane Minghim https://edisciplinas.usp.br/course/view.php?id=61213 https://edisciplinas.usp.br/course/view.php?id=61210 P.A.E.
Sistemas de Referência
 Sistemas de Referência Um sistema de coordenada é denominado de Sistema de Referência quando servir para alguma finalidade específica; Aspectos a serem observados na definição de um sistema de referência:
Sistemas de Referência Um sistema de coordenada é denominado de Sistema de Referência quando servir para alguma finalidade específica; Aspectos a serem observados na definição de um sistema de referência:
Análise multivariada
 UNIFAL-MG, campus Varginha 6 de Setembro de 2018 Matriz inversa Já discutimos adição, subtração e multiplicação de matrizes A divisão, da forma como conhecemos em aritmética escalar, não é definida para
UNIFAL-MG, campus Varginha 6 de Setembro de 2018 Matriz inversa Já discutimos adição, subtração e multiplicação de matrizes A divisão, da forma como conhecemos em aritmética escalar, não é definida para
Sumário. Introdução Câmera sintética Window-to-Viewport Exercício. 29-May-13 Leandro Tonietto!2
 Câmera Sintética Leandro Tonietto Computação Gráfica Desenvolvimento Jogos e Entretenimento Digital ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/pgr/camerasintetica.pdf 05-13 29-May-13
Câmera Sintética Leandro Tonietto Computação Gráfica Desenvolvimento Jogos e Entretenimento Digital ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/pgr/camerasintetica.pdf 05-13 29-May-13
Laboratório de Programação com Games. Conteúdo: Professor: - Transformações no plano. Instituto de Computação - UFF
 Laboratório de Programação com Games Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Transformações no plano Transformações geométricas: Introdução Na Computação Gráfica é essencial poder
Laboratório de Programação com Games Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Transformações no plano Transformações geométricas: Introdução Na Computação Gráfica é essencial poder
Vetores e Geometria Analítica
 Vetores e Geometria Analítica ECT2102 Prof. Ronaldo Carlotto Batista 23 de fevereiro de 2016 AVISO O propósito fundamental destes slides é servir como um guia para as aulas. Portanto eles não devem ser
Vetores e Geometria Analítica ECT2102 Prof. Ronaldo Carlotto Batista 23 de fevereiro de 2016 AVISO O propósito fundamental destes slides é servir como um guia para as aulas. Portanto eles não devem ser
Econometria. Operações básicas de vetores. Operações básicas de vetores. Operações básicas de vetores. Independência de vetores
 Operações básicas de vetores Econometria Adição Suponha dois vetores x e y com n componentes cada: 1. Alguns tópicos importantes de Álgebra Linear Operações básicas de vetores Multiplicação escalar x é
Operações básicas de vetores Econometria Adição Suponha dois vetores x e y com n componentes cada: 1. Alguns tópicos importantes de Álgebra Linear Operações básicas de vetores Multiplicação escalar x é
Universidade Federal de Alagoas Instituto de Matemática. Geometria. Prof. Thales Vieira
 Universidade Federal de Alagoas Instituto de Matemática Geometria Prof. Thales Vieira 2014 Geometria Euclidiana Espaço R n R n = {(x 1,...,x n ); x i 2 R} Operações entre elementos de R n Soma: (x 1,x
Universidade Federal de Alagoas Instituto de Matemática Geometria Prof. Thales Vieira 2014 Geometria Euclidiana Espaço R n R n = {(x 1,...,x n ); x i 2 R} Operações entre elementos de R n Soma: (x 1,x
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 Considere o triângulo T={V 1, V 2, V 3 }, com V
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 Considere o triângulo T={V 1, V 2, V 3 }, com V
Fundamentos Matemáticos de Computação Gráfica
 Fundamentos Matemáticos de Computação Gráfica Fundamentos Matemáticos de CG Vetores e Pontos Matrizes Transformações Geométricas Referências: Mathematics for Computer Graphics Applications. M. E. Mortenson.
Fundamentos Matemáticos de Computação Gráfica Fundamentos Matemáticos de CG Vetores e Pontos Matrizes Transformações Geométricas Referências: Mathematics for Computer Graphics Applications. M. E. Mortenson.
Aula9 e 10. Projeções Planas. Como representar objetos 3D em dispositivos 2D? 2019/1 IC / UFF. Paginas 91 a 101 livro texto de computacao grafica
 Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
ALGEBRA LINEAR 1 RESUMO E EXERCÍCIOS* P1
 ALGEBRA LINEAR 1 RESUMO E EXERCÍCIOS* P1 *Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções em VETORES Um vetor é uma lista ordenada de números
ALGEBRA LINEAR 1 RESUMO E EXERCÍCIOS* P1 *Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções em VETORES Um vetor é uma lista ordenada de números
Álgebra Linear e Geometria Anaĺıtica. Matrizes e Sistemas de Equações Lineares
 universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 1 Matrizes e Sistemas de Equações Lineares Geometria anaĺıtica em R 3 [1 01]
universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 1 Matrizes e Sistemas de Equações Lineares Geometria anaĺıtica em R 3 [1 01]
Sistemas de coordenadas Transformação entre sistemas
 http://computacaografica.ic.uff.br/conteudocap2.html Sistemas de coordenadas Transformação entre sistemas 2019-1 Sistemas de Coordenadas Referência sobre o tamanho e a posição dos objetos na área de trabalho;
http://computacaografica.ic.uff.br/conteudocap2.html Sistemas de coordenadas Transformação entre sistemas 2019-1 Sistemas de Coordenadas Referência sobre o tamanho e a posição dos objetos na área de trabalho;
n. 1 Matrizes Cayley (1858) As matrizes surgiram para Cayley ligadas às transformações lineares do tipo:
 As matrizes surgiram para Cayley ligadas às transformações lineares do tipo:") n. Matrizes Foi um dos primeiros matemáticos a estudar matrizes, definindo a ideia de operarmos as matrizes como na Álgebra. Historicamente o estudo das Matrizes era apenas uma sombra dos Determinantes.
n. Matrizes Foi um dos primeiros matemáticos a estudar matrizes, definindo a ideia de operarmos as matrizes como na Álgebra. Historicamente o estudo das Matrizes era apenas uma sombra dos Determinantes.
Transformações 3D. Soraia Raupp Musse
 Transformações 3D Soraia Raupp Musse 1 Translação Coord. Homogêneas x y 1 t x 1 t y 1 x y x y x + t x y + t y t p p r r r + ' 2 x y x + t x y + t y y Escala Coord. Homogêneas x y s x s y 1 x y x y s x
Transformações 3D Soraia Raupp Musse 1 Translação Coord. Homogêneas x y 1 t x 1 t y 1 x y x y x + t x y + t y t p p r r r + ' 2 x y x + t x y + t y y Escala Coord. Homogêneas x y s x s y 1 x y x y s x
Curso Física 1. Aula - 4. Vetores
 Curso Física 1 Aula - 4 Vetores Escalares e Vetores Uma quantidade escalar é completamente especificada por um único valor com uma unidade apropriada e não tem nenhuma direção especifica. Exemplos: - Distância
Curso Física 1 Aula - 4 Vetores Escalares e Vetores Uma quantidade escalar é completamente especificada por um único valor com uma unidade apropriada e não tem nenhuma direção especifica. Exemplos: - Distância
Computação Gráfica I. Conteúdo: Professor: - Transformações geométricas no plano. Instituto de Computação - UFF
 Computação Gráfica I Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Transformações geométricas no plano. Transformações geométricas: Introdução Na Computação Gráfica é essencial poder
Computação Gráfica I Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Transformações geométricas no plano. Transformações geométricas: Introdução Na Computação Gráfica é essencial poder
Álgebra Linear. Prof. Ronaldo Carlotto Batista. 20 de março de 2019
 Álgebra Linear ECT2202 Prof. Ronaldo Carlotto Batista 20 de março de 2019 AVISO O propósito fundamental destes slides é servir como um guia para as aulas. Portanto eles não devem ser entendidos como referência
Álgebra Linear ECT2202 Prof. Ronaldo Carlotto Batista 20 de março de 2019 AVISO O propósito fundamental destes slides é servir como um guia para as aulas. Portanto eles não devem ser entendidos como referência
PEF5917 Elementos de Mecânica dos Sólidos Deformáveis. 15 de março de ª LISTA DE EXERCÍCIOS
 ª LISTA DE EXERCÍCIOS Questão 1 Considere a deformação definida pelo seguinte campo de deslocamentos: ( ) u = a x u = 0 u = 0 1 Onde a é uma constante. Considere o ponto P de coordenadas (0,1,0) na configuração
ª LISTA DE EXERCÍCIOS Questão 1 Considere a deformação definida pelo seguinte campo de deslocamentos: ( ) u = a x u = 0 u = 0 1 Onde a é uma constante. Considere o ponto P de coordenadas (0,1,0) na configuração
Computação Gráfica. Prof. André Yoshimi Kusumoto
 Computação Gráfica Prof. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Representação da Imagem A representação vetorial das imagens é principalmente empregada para a definição e modelagem dos objetos
Computação Gráfica Prof. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Representação da Imagem A representação vetorial das imagens é principalmente empregada para a definição e modelagem dos objetos
Ficha de Exercícios nº 3
 Nova School of Business and Economics Álgebra Linear Ficha de Exercícios nº 3 Transformações Lineares, Valores e Vectores Próprios e Formas Quadráticas 1 Qual das seguintes aplicações não é uma transformação
Nova School of Business and Economics Álgebra Linear Ficha de Exercícios nº 3 Transformações Lineares, Valores e Vectores Próprios e Formas Quadráticas 1 Qual das seguintes aplicações não é uma transformação
3D no OpenGL. Visualização e Transformações Perspectiva. Transformações do Modelview. Processo
 Visualização e Transformações Perspectiva 3D no OpenGL Para gerar imagens de um objeto 3D, é necessário compreender transformações perspectiva Foley & van Dam - Cap. 6 Notas de aula do Prof. Mount: aulas
Visualização e Transformações Perspectiva 3D no OpenGL Para gerar imagens de um objeto 3D, é necessário compreender transformações perspectiva Foley & van Dam - Cap. 6 Notas de aula do Prof. Mount: aulas
A primeira coisa a fazer é saber quais são as equações das curvas quando elas já se encontram na melhor
 Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Prof. Fernando V. Paulovich 3 de maio de SCC Computação Gráca
 Transformações Geométricas 2D SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Transformações Geométricas 2D SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Equação Geral do Segundo Grau em R 2
 8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 1 a Prova - 1 o semestre de y + az = a (a 2)x + y + 3z = 0 (a 1)y = 1 a
x + y + 3z = 0 (a 1)y = 1 a") MAT457 ÁLGEBRA LINEAR PARA ENGENHARIA I 1 a Prova - 1 o semestre de 018 Questão 1. Se a R, é correto afirmar que o sistema linear y + az = a (a x + y + 3z = 0 (a 1y = 1 a é: (a possível e indeterminado
MAT457 ÁLGEBRA LINEAR PARA ENGENHARIA I 1 a Prova - 1 o semestre de 018 Questão 1. Se a R, é correto afirmar que o sistema linear y + az = a (a x + y + 3z = 0 (a 1y = 1 a é: (a possível e indeterminado
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO LEEC EXERCÍCIOS DE ÁLGEBRA
 FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO LEEC EXERCÍCIOS DE ÁLGEBRA Exercícios vários. Considere o conjunto C =, e a operação binária definida por a b = min(a, b). O conjunto C é, relativamente
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO LEEC EXERCÍCIOS DE ÁLGEBRA Exercícios vários. Considere o conjunto C =, e a operação binária definida por a b = min(a, b). O conjunto C é, relativamente
Ficha de Trabalho 02 Sistemas. Matriz Inversa. (Aulas 4 a 6).
.") F I C H A D E R A B A L H O 0 Ficha de rabalho 0 Sistemas. Matriz Inversa. (Aulas 4 a 6). Sistemas de equações lineares. Equação linear. Sistema de equações lineares. Equação matricial. Soluções do sistema.
F I C H A D E R A B A L H O 0 Ficha de rabalho 0 Sistemas. Matriz Inversa. (Aulas 4 a 6). Sistemas de equações lineares. Equação linear. Sistema de equações lineares. Equação matricial. Soluções do sistema.
PLANO DE ENSINO CURSO ENGENHARIA AMBIENTAL MATRIZ 519
 Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Campus Medianeira PLANO DE ENSINO CURSO ENGENHARIA AMBIENTAL MATRIZ 519 FUNDAMENTAÇÃO LEGAL Resolução 075/09 COEPP, de 21 de agosto de
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Campus Medianeira PLANO DE ENSINO CURSO ENGENHARIA AMBIENTAL MATRIZ 519 FUNDAMENTAÇÃO LEGAL Resolução 075/09 COEPP, de 21 de agosto de
forças em relação a um ponto P E 3 como sendo o vetor M P V 3 dado por: Considere o sistema formado pelas forças
 Nesta prova considera-se fixada uma orientação do espaço e um sistema de coordenadas Σ = (O, E) em E 3, em que E é uma base ortonormal positiva de V 3. A menos de menção explícita em contrário, equações
Nesta prova considera-se fixada uma orientação do espaço e um sistema de coordenadas Σ = (O, E) em E 3, em que E é uma base ortonormal positiva de V 3. A menos de menção explícita em contrário, equações
MAE125 Álgebra Linear /2 Turmas EQN/QIN
 MAE25 Álgebra Linear 2 205/2 Turmas EQN/QIN Planejamento (última revisão: 26 de outubro de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na aula seguinte e valem nota Todas as
MAE25 Álgebra Linear 2 205/2 Turmas EQN/QIN Planejamento (última revisão: 26 de outubro de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na aula seguinte e valem nota Todas as
Universidade Federal de Viçosa Centro de Ciências Exatas e Tecnológicas Departamento de Matemática
 1 Universidade Federal de Viçosa Centro de Ciências Exatas e Tecnológicas Departamento de Matemática 3 a Lista - MAT 137 - Introdução à Álgebra Linear 2017/II 1. Sejam u = ( 4 3) v = (2 5) e w = (a b).
1 Universidade Federal de Viçosa Centro de Ciências Exatas e Tecnológicas Departamento de Matemática 3 a Lista - MAT 137 - Introdução à Álgebra Linear 2017/II 1. Sejam u = ( 4 3) v = (2 5) e w = (a b).
Geometria Analítica. Prof Marcelo Maraschin de Souza
 Geometria Analítica Prof Marcelo Maraschin de Souza Vetor Definido por dois pontos Seja o vetor AB de origem no ponto A(x 1, y 1 ) e extremidade no ponto B(x 2, y 2 ). Qual é a expressão algébrica que
Geometria Analítica Prof Marcelo Maraschin de Souza Vetor Definido por dois pontos Seja o vetor AB de origem no ponto A(x 1, y 1 ) e extremidade no ponto B(x 2, y 2 ). Qual é a expressão algébrica que
Computação Gráfica - OpenGl 02
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - OpenGl 02 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - OpenGl 02 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti
1 a Lista de Exercícios MAT 3211 Álgebra Linear Prof. Vyacheslav Futorny
 1 a Lista de Exercícios MAT 3211 Álgebra Linear - 213 - Prof. Vyacheslav Futorny 1 a parte: Resolução de sistemas de equações lineares, matrizes inversíveis 1. Para cada um dos seguintes sistemas de equações
1 a Lista de Exercícios MAT 3211 Álgebra Linear - 213 - Prof. Vyacheslav Futorny 1 a parte: Resolução de sistemas de equações lineares, matrizes inversíveis 1. Para cada um dos seguintes sistemas de equações
ROBÓTICA TRANSFORMAÇÕES MATRICIAIS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial TRANSFORMAÇÕES MATRICIAIS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial TRANSFORMAÇÕES MATRICIAIS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Renato Martins Assunção
 Análise Numérica Renato Martins Assunção DCC - UFMG 2012 Renato Martins Assunção (DCC - UFMG) Análise Numérica 2012 1 / 84 Equação linear Sistemas de equações lineares A equação 2x + 3y = 6 é chamada linear
Análise Numérica Renato Martins Assunção DCC - UFMG 2012 Renato Martins Assunção (DCC - UFMG) Análise Numérica 2012 1 / 84 Equação linear Sistemas de equações lineares A equação 2x + 3y = 6 é chamada linear
MAE125 Álgebra Linear /1 Turmas EQN/QIN
 MAE25 Álgebra Linear 2 205/ Turmas EQN/QIN Planejamento (última revisão: 0 de junho de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na semana seguinte à aula e valem nota Todas
MAE25 Álgebra Linear 2 205/ Turmas EQN/QIN Planejamento (última revisão: 0 de junho de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na semana seguinte à aula e valem nota Todas
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO. CURSO Engenharia Elétrica MATRIZ 548
 Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 00/11, aprovado pela Resolução n.
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 00/11, aprovado pela Resolução n.
Lista de exercícios 11 Representação Matricial de Aplicações Lineares
 Universidade Federal do Paraná Algebra Linear Olivier Brahic Lista de exercícios Representação Matricial de Aplicações Lineares Exercício : Para cada transformação linear seguinte, encontre a representação
Universidade Federal do Paraná Algebra Linear Olivier Brahic Lista de exercícios Representação Matricial de Aplicações Lineares Exercício : Para cada transformação linear seguinte, encontre a representação
Visualização 3D. Soraia Raupp Musse
 Visualização 3D Soraia Raupp Musse 1 Pipeline de Visualização Em 2D as coisas são mais simples Simplesmente especificar uma janela do mundo 2D e uma viewport na superfície de visualização A complexidade
Visualização 3D Soraia Raupp Musse 1 Pipeline de Visualização Em 2D as coisas são mais simples Simplesmente especificar uma janela do mundo 2D e uma viewport na superfície de visualização A complexidade
que transforma A em F. T (A) = F significa que a imagem do ponto A pela translação associada ao vetor é o ponto F. Assim o vetor =.
 = F significa que a imagem do ponto A pela translação associada ao vetor é o ponto F. Assim o vetor =.") Escola Básica de Santa Marinha Matemática 2010/2011 8.º Ano Síntese de conteúdos Isometrias 1. Translação 1.1 Translação associada a um vector A translação é uma deslocação em linha reta que corresponde
Escola Básica de Santa Marinha Matemática 2010/2011 8.º Ano Síntese de conteúdos Isometrias 1. Translação 1.1 Translação associada a um vector A translação é uma deslocação em linha reta que corresponde
Questão Resposta 1 e 2 c 3 a 4 a 5 d 6 d 7 d 8 b 9 a 10 c 11 e 12 c 13 c 14 d 15 d 16 b
 Questão Resposta 1 e 2 c 3 a 4 a 5 d 6 d 7 d 8 b 9 a 10 c 11 e 12 c 13 c 14 d 15 d 16 b MAT2457 - Álgebra Linear para Engenharia I Prova 1-10/04/2013 Nome: NUSP: Professor: Turma: INSTRUÇÕES (1) A prova
Questão Resposta 1 e 2 c 3 a 4 a 5 d 6 d 7 d 8 b 9 a 10 c 11 e 12 c 13 c 14 d 15 d 16 b MAT2457 - Álgebra Linear para Engenharia I Prova 1-10/04/2013 Nome: NUSP: Professor: Turma: INSTRUÇÕES (1) A prova
6. Verifique detalhadamente que os seguintes conjuntos são espaços vetoriais(com a soma e produto por escalar usuais):
:") a Lista. Sejam u = ( 4 ) v = ( 5) e w = (a b). Encontre a e b tais que (a)w = u + v (b)w = 5v (c)u + w = u v. Represente os vetores acima no plano cartesiano.. Sejam u = (4 ) v = ( 4) e w = (a b c). Encontre
a Lista. Sejam u = ( 4 ) v = ( 5) e w = (a b). Encontre a e b tais que (a)w = u + v (b)w = 5v (c)u + w = u v. Represente os vetores acima no plano cartesiano.. Sejam u = (4 ) v = ( 4) e w = (a b c). Encontre
CARGA HORÁRIA SEMANAL: 06 horas
 PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
PLANO DE ENSINO DE DISCIPLINA UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA DISCIPLINA: Geometria Analítica e Álgebra Linear CÓDIGO: MAT 135 DURAÇÃO
Álgebra Linear I - Aula 14. Roteiro
 Álgebra Linear I - Aula 14 1 Matrizes 2 Forma matricial de uma transformação linear 3 Composição de transformações lineares e produto de matrizes 4 Determinante do produto de matrizes Roteiro 1 Matrizes
Álgebra Linear I - Aula 14 1 Matrizes 2 Forma matricial de uma transformação linear 3 Composição de transformações lineares e produto de matrizes 4 Determinante do produto de matrizes Roteiro 1 Matrizes
aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
Perspectivas Cap 2 (do livro texto) Aula 7 UFF
 Aula 7 UFF") Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Resultantes de um sistema de forças
 Resultantes de um sistema de forças Objetivos da aula Discutir o conceito do momento de uma força e mostrar como calculá-lo em duas e três dimensões. Fornecer um método para determinação do momento de
Resultantes de um sistema de forças Objetivos da aula Discutir o conceito do momento de uma força e mostrar como calculá-lo em duas e três dimensões. Fornecer um método para determinação do momento de
Revisão de Álgebra Linear
 Introdução: Revisão de Álgebra Linear Antonio Elias Fabris Instituto de Matemática e Estatística Universidade de São Paulo Map 2121 Aplicações de Álgebra Linear Antonio Elias Fabris (IME-USP) Revisão de
Introdução: Revisão de Álgebra Linear Antonio Elias Fabris Instituto de Matemática e Estatística Universidade de São Paulo Map 2121 Aplicações de Álgebra Linear Antonio Elias Fabris (IME-USP) Revisão de