aula6 2018/2 IC / UFF Como representar objetos 3D em dispositivos 2D?
|
|
|
- Brenda Vilalobos
- 5 Há anos
- Visualizações:
Transcrição
1 aula6 Como representar objetos 3D em dispositivos 2D? 2018/2 IC / UFF Projeções Planas O P p

2 2018/2 IC / UFF aula6: Projeções Planas Material disponível no site do curso: curso de C.G. - TCC IC/UFF Nos seguintes arquivos pdf: Transformando3D porjecoes.pdf Projecoes.pdf Aula-6.pdf 2014/2 CG-Aula pdf Transformando3D porjecoes.pdf CG-Aula pdf


3 Um objeto é um conjunto de pontos no espaço o 3D Já vimos como definir essa objeto pela sua topologia e geometria e como transformá-lo transformado todos os seus pontos a partir de seus vértices
4 Coordenadas Homogêneas Reflexão, rotação e escala podem ser executadas com o uso de matrizes Mas a transformação de translação não. Para solucionar esse e outros problemas é recomendado o uso de coordenadas homogêneas para todas as operações.
5 Coordenadas Homogêneas O sistema de coordenadas homogêneas (SCH) utiliza quatro valores para representar um ponto P no espaço, que será descrito por (x, y, z, M). A transformação do SCH para o cartesiano se dá pela relação (x, y, z) = (x /M, y /M, z /M) Os pontos onde M=0 estão fora do espaço dimensional (infinito!!!! ). O uso de coordenadas homogêneas é importante em Computação também para permitir a representação de reais por inteiros Quando M=1 a representação é a mesma do espaço cartesiano.
6 Espaço 3D Um ponto do espaço 3D É denotado por P = [x,y,z,w] em coordenadas homogêneas. ou P={( x,y,z,λ );λ 0,( x/λ,y/λ,z/λ,1)}
7 Translação no Espaço 3D
8 Escala em torno da origem no Espaço 3D
9 Rotações no Espaço 3D (ângulos de Euler regra da mão direita)

10 Em torno de Z

11 Em torno de X

12 Em torno de Y
13 Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada. Ângulos entre vetores é inalterado. Rotações, reflexões e translações Matrizes elementares associadas a efeitos são geralmente combinadas para fazer transformações complexas


14 Escala em torno da origem do espaço 3D s x =1,8 ; s y =0,5 ; s z =3,0


15 Rotações no Espaço 3D (ângulos de Euler)
16 Em torno de Z
17 Em torno de X
18 Em torno de Y
19 Matriz de Transformação final Para evitar que diversas operações matemáticas sejam feitas individualmente é criada uma matriz de transformação pela multiplicação de toda em coordenadas homogêneas que pode fazer todas os efeitos (aplicar todas as transformações) de uma vez Esta matriz é denominada matriz de transformação corrente e é utilizada para transformação de todos os vértices do objeto

20 Em torno dos 3 eixos
21 Escopo de Transformações Diversas podem ser feitas em serie e aplicadas de uma só fez, mas a ordem é muito importante Pois as transformações nem sempre são comutativa!!!
22 Por exemplo Rotações não são comutativas!
23 A ordem é importante. Diversas transformações não são comutativas!
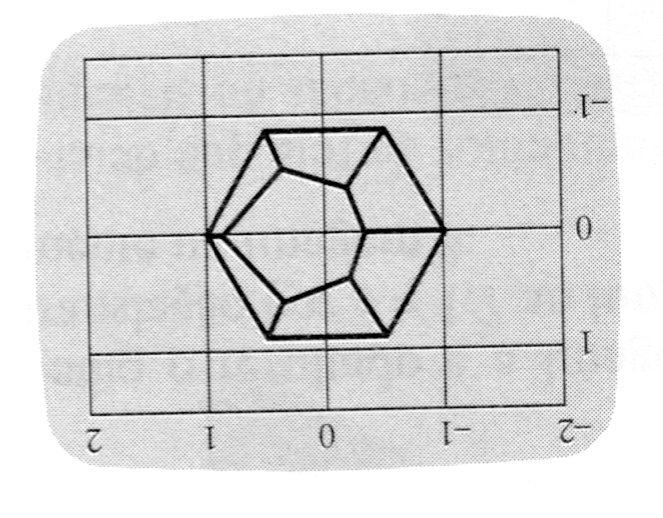
24 Mas como apresentar um objeto do espaço o 3D na tela 2D? A forma mais simples de representar um objeto 3D em 2D é simplesmente Descartar uma das suas coordenadas. Se os eixos principais do objeto forem paralelos aos sistemas de eixos considerados, e ainda se os raios projetores forem paralelos aos eixos e perpendiculares ao plano de projeção como ela fica?
25 Um objeto no espaço o 3D Pode ser visto desta forma se você o está vendo de frente em relação aos seus eixos principais e bastante longe para não ter o efeito de perspectiva. Este é um caso especial das projeções paralelas ortogonais ao plano de projeção, ou ORTOGRAFICAS
26 Projeções Mas a teoria de projeções é bem genérica e permite representar o objeto em qualquer superfície mesmo não plana.
27 Projeções planas:
28 Classificação BÁSICA:
29 Cada tipo de projeção Tem casos de aplicação específicos nos quais são bem úteis. E elas serão também definidas e implementadas como matrizes. Embora não seja uma operação invencível geralmente tem unicidade!!!
30 Lembra do espaço o 3D? A forma mais simples de representar um objeto 3D em 2D é simplesmente Descartar uma das suas coordenadas. Que matriz varia isso?
31 Características:
32 Características
33
34 Projeção paralela ORTOGRAFICA OU VISTAS Projeção paralela ORTOGRAFICA no PLANO z=0 (só( restam coordenadas x,y dos pontos ) :
35 Projeção paralela ORTOGRAFICA OU VISTAS Projeção paralela ORTOGRAFICA no PLANO z=0 (só( restam x,y) ) :
36 (só restam x e y) Projeção paralela ORTOGRAFICA no PLANO z=0: E SE TIVERMOS Projeção paralela ORTOGRAFICA POR UM PLANO PARALELO A z=0, podemos pegar e aplicar uma translação. z=tz como fica essa matriz?
37 De mesma forma Você pode descobrir as matrizes que fazem as outras vistas!! E projetar nestes planos seus objetos
38 Projeção paralela ORTOGRÁFICA no PLANO y=0: (só restam x,z) Todo y=0:
39 E SE TIVERMOS Projeção paralela ORTOGRAFICA POR UM PLANO PARALELO A x=0, i.e. x=tx? (só restam y,z) Projeção paralela ORTOGRAFICA no PLANO x=0:
40 Projeção paralela axonométrica Raios projetores paralelos mas não na mesma direção dos eixos principais do objeto, e perpendiculares ao plano de projeção : Orientação qualquer: TRIMÉTRICA De forma que 2 eixos tenha a mesma métrica: DIMÉTRICA Os 3 eixos tenha a mesma métrica: ISOMÉTRICA
41
42 Projeção paralela isométrica Vamos reposicionar nosso cubo inicial!
43 Projeção paralela isométrica Reposicionar o cubo e Depois projetá-lo
44 Projeção paralela isométrica Os vetores unitários agora são: Os vetores unitários em x e y: Considerando só senos: Simplificando a expressão:
45 Projeção paralela isométrica Os vetores unitários em z e y: Considerando só senos: Simplificando a expressão:
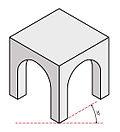
46 Projeção paralela isométrica Em engenharia e desenho técnico um ângulo importante na projeção isométrica é o chamado A na figura ao lado (que ângulo é esse?) Considerando o vetor unitário x : Se vê : como Tem-se que:


47 Projeção paralela isométrica Em engenharia e desenho técnico, saber o quanto muda o comprimento na projeção isométrica é importante: Vamos chamar o novo comprimento de F, voltando as medidas dos vetores depois de projetados : O comprimento na projeção isométrica muda 82%!
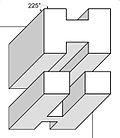
48 Projeção paralela isométrica Como ficaria nossa figura escadinha em isométrica no plano xy ou z=0?
49 conclusão Vimos até aqui como fazer as projeções Paralelas Ortográficas, que são as que os raios projetores chegam sempre perpendiculares aos planos de projeção.
Aula9 e 10. Projeções Planas. Como representar objetos 3D em dispositivos 2D? 2019/1 IC / UFF. Paginas 91 a 101 livro texto de computacao grafica
 Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
aula6 Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
aula 10 Projeções Planas IC/UFF tela de um museu de Montreal
 aula 10 Projeções Planas IC/UFF - 2016 tela de um museu de Montreal Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D
aula 10 Projeções Planas IC/UFF - 2016 tela de um museu de Montreal Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D
Projeções. Cap 2 (do livro texto) Aula 6 UFF
 Aula 6 UFF") Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
Coordenadas Homogêneas no Plano e no Espaço
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
Curso de CG 2018/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2018/2 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Site do curso como : CG-Aula5-2017.pdf CG-Aula8-2016.pdf
Curso de CG 2019/1 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Transformações Geométricas no Plano e no Espaço Esse material estáno Livro do curso no cap 2. Definição Transformações geométricas
aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
http://computacaografica.ic.uff.br/conteudocap2.html aula8 Transformações Geométricas no Plano e no Espaço 2016/2 IC / UFF Definição Transformações geométricas são operações que podem ser utilizadas para
O p Porque esta imagem está invertida? aula8 Trabalho de Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html P O p Porque esta imagem está invertida? aula8 Trabalho de Projeções Planas 2017/2 IC / UFF Trabalho de Programação: Usando apenas os conceitos dados
http://computacaografica.ic.uff.br/conteudocap2.html P O p Porque esta imagem está invertida? aula8 Trabalho de Projeções Planas 2017/2 IC / UFF Trabalho de Programação: Usando apenas os conceitos dados
Transformações Geométricas em C.G.
 Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
Curso de Computação Gráfica (CG) 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito
 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito") Curso de Computação Gráfica (CG) 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito 1- Mostre porque a matriz de rotação 3D em torno do eixo y precisa ter o valor
Curso de Computação Gráfica (CG) 2014/2- Cap 2 parte 2 Transformações no espaço e projeções Trabalho 5 (individual) - Gabarito 1- Mostre porque a matriz de rotação 3D em torno do eixo y precisa ter o valor
Sistema de coordenadas
 Sistema de coordenadas Sistema de coordenadas Coordenadas cartesianas Coordenadas polares Transformação sistema de coordenadas Coordenadas relativas Sistema de coordenadas cartesianas Sistema de coordenadas
Sistema de coordenadas Sistema de coordenadas Coordenadas cartesianas Coordenadas polares Transformação sistema de coordenadas Coordenadas relativas Sistema de coordenadas cartesianas Sistema de coordenadas
Projeção 3D. André Tavares da Silva. Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci
 Projeção 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Projeção Permite ver 2D objetos 3D Elementos: Plano de Projeção Raio de Projeção Centro de Projeção
Projeção 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Projeção Permite ver 2D objetos 3D Elementos: Plano de Projeção Raio de Projeção Centro de Projeção
Introdução ao Processamento e Síntese de imagens - Projeções
 Introdução ao Processamento e Síntese de imagens - Projeções Júlio Kiyoshi Hasegawa Fontes: Esperança e Cavalcanti (22) (UFRJ) e Traina e Oliveira (24) (USP) Antonio Maria Garcia Tommaselli - notas de
Introdução ao Processamento e Síntese de imagens - Projeções Júlio Kiyoshi Hasegawa Fontes: Esperança e Cavalcanti (22) (UFRJ) e Traina e Oliveira (24) (USP) Antonio Maria Garcia Tommaselli - notas de
Projeções: conceitos. Projetar pontos no espaço d dimensional no plano d-1 dimensional, usando um ponto especial chamado centro de projeção
 Projeções Projeções: conceitos Projetar pontos no espaço d dimensional no plano d-1 dimensional, usando um ponto especial chamado centro de projeção Pontos no espaço 3D projetados em um plano 2D centro
Projeções Projeções: conceitos Projetar pontos no espaço d dimensional no plano d-1 dimensional, usando um ponto especial chamado centro de projeção Pontos no espaço 3D projetados em um plano 2D centro
aula6 Curvas de Hermite 2016/2 IC / UFF Criadas por Charles Hermite ( ) https://pt.wikipedia.org/wiki/charles_hermite
 https://pt.wikipedia.org/wiki/charles_hermite") Criadas por Charles Hermite (1822-1901) https://pt.wikipedia.org/wiki/charles_hermite aula6 Vetor é : Na matemática - um elemento com de um espaço vetorial Em Física em oposição as grandezas escalares,
Criadas por Charles Hermite (1822-1901) https://pt.wikipedia.org/wiki/charles_hermite aula6 Vetor é : Na matemática - um elemento com de um espaço vetorial Em Física em oposição as grandezas escalares,
Perspectivas Cap 2 (do livro texto) Aula 7 UFF
 Aula 7 UFF") Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Computação Gráfica. Prof. MSc. André Yoshimi Kusumoto
 Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Para que objetos tridimensionais possam ser visualizados é necessário que suas imagens sejam geradas na tela. Para isso,
Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Para que objetos tridimensionais possam ser visualizados é necessário que suas imagens sejam geradas na tela. Para isso,
Gabarito - P1 de CG 2019 /1
 Gabarito - P1 de CG 2019 /1 1- Mencione qual a vantagem de usar estruturas de dados baseada em Faces e Vértices para criar objetos ao invés de apenas uma estrutura baseada em coordenadas dos Vértices.
Gabarito - P1 de CG 2019 /1 1- Mencione qual a vantagem de usar estruturas de dados baseada em Faces e Vértices para criar objetos ao invés de apenas uma estrutura baseada em coordenadas dos Vértices.
aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
Projeções. Prof. Márcio Bueno
 Projeções Prof. Márcio Bueno {cgtarde,cgnoite}@marciobueno.com Projeções Visão humana: enxerga em 2D, a sensação de profundidade vem da diferença entre as vistas esquerda e direita do mesmo objeto Projeção:
Projeções Prof. Márcio Bueno {cgtarde,cgnoite}@marciobueno.com Projeções Visão humana: enxerga em 2D, a sensação de profundidade vem da diferença entre as vistas esquerda e direita do mesmo objeto Projeção:
Computação Gráfica Transformações Projetivas
 Computação Gráfica Transformações Projetivas Professora: Sheila Cáceres Transformações Projetivas Projetar modelos geométricos 3D numa imagem 2D, exibível em dispositivos de saída 2D Exemplo: 2 Projeção
Computação Gráfica Transformações Projetivas Professora: Sheila Cáceres Transformações Projetivas Projetar modelos geométricos 3D numa imagem 2D, exibível em dispositivos de saída 2D Exemplo: 2 Projeção
Transformações Geométricas Grafos de Cena
 Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
DESENHO TÉCNICO MECÂNICO I. Aula 02 Projeção, vistas, diedros. Desenho Técnico Mecânico I
 DESENHO TÉCNICO MECÂNICO I Aula 02 Projeção, vistas, diedros PROJEÇÕES Projeção Cônica Projeção Cilíndrica Perspectiva Linear Projeção Oblíqua Projeção Ortogonal Um ponto de fuga Dois pontos de fuga Dimétrica
DESENHO TÉCNICO MECÂNICO I Aula 02 Projeção, vistas, diedros PROJEÇÕES Projeção Cônica Projeção Cilíndrica Perspectiva Linear Projeção Oblíqua Projeção Ortogonal Um ponto de fuga Dois pontos de fuga Dimétrica
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Sistemas de coordenadas Transformação entre sistemas
 http://computacaografica.ic.uff.br/conteudocap2.html Sistemas de coordenadas Transformação entre sistemas 2019-1 Sistemas de Coordenadas Referência sobre o tamanho e a posição dos objetos na área de trabalho;
http://computacaografica.ic.uff.br/conteudocap2.html Sistemas de coordenadas Transformação entre sistemas 2019-1 Sistemas de Coordenadas Referência sobre o tamanho e a posição dos objetos na área de trabalho;
Aula /2 Sistemas de coordenadas Transformação entre sistemas
 http://computacaografica.ic.uff.br/conteudocap2.html Aula 19 2017/2 Sistemas de coordenadas Transformação entre sistemas Sistemas de Coordenadas O Sistema de Coordenadas nos dá uma referência sobre o tamanho
http://computacaografica.ic.uff.br/conteudocap2.html Aula 19 2017/2 Sistemas de coordenadas Transformação entre sistemas Sistemas de Coordenadas O Sistema de Coordenadas nos dá uma referência sobre o tamanho
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
 Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Perspectivas. Perspectivas. Perspectivas. Fonte: tela software de pesquisa google
 Perspectivas Perspectivas Perspectivas Fonte: tela software de pesquisa google Perspectivas Perspectivas Perspectivas Fonte: www.novasperspectivas.com.br Fonte: site.dotstore.com.br Perspectivas Perspectivas
Perspectivas Perspectivas Perspectivas Fonte: tela software de pesquisa google Perspectivas Perspectivas Perspectivas Fonte: www.novasperspectivas.com.br Fonte: site.dotstore.com.br Perspectivas Perspectivas
Visualização em 3-D - Projeções Planares
 Visualização em 3-D - Projeções Planares Projetores PRP - Centro de Projeção A n (u,v,n) - sistema de coordenadas do plano de projeção (x,y,z) - sistema de coordenadas do objeto (regra da mão direita -
Visualização em 3-D - Projeções Planares Projetores PRP - Centro de Projeção A n (u,v,n) - sistema de coordenadas do plano de projeção (x,y,z) - sistema de coordenadas do objeto (regra da mão direita -
Perspectivas Professora Valéria Peixoto Borges
 Universidade Federal de Campina Grande Centro de Ciências e Tecnologia Agroalimentar Perspectivas Professora Valéria Peixoto Borges INTRODUÇÃO A perspectiva é um tipo especial de projeção, na qual são
Universidade Federal de Campina Grande Centro de Ciências e Tecnologia Agroalimentar Perspectivas Professora Valéria Peixoto Borges INTRODUÇÃO A perspectiva é um tipo especial de projeção, na qual são
Prof. Regis de Castro Ferreira
 1. INTRODUÇÃO As perspectivas são utilizadas para termos uma visão geral em três dimensões do objeto auxiliando na compreensão e execução do mesmo. As perspectivas se dividem em: 2. PERSPECTIVAS BASEADAS
1. INTRODUÇÃO As perspectivas são utilizadas para termos uma visão geral em três dimensões do objeto auxiliando na compreensão e execução do mesmo. As perspectivas se dividem em: 2. PERSPECTIVAS BASEADAS
31/05/2017. Corpo rígido. 4 - A Dinâmica do corpo rígido TÓPICOS FUNDAMENTAIS DE FÍSICA. Coordenadas do corpo rígido. Coordenadas do corpo rígido
 Corpo rígido Sistema de partículas sujeitas aos vínculos holonômicos 4 - A Dinâmica do corpo rígido TÓPICOS FUNDAMENTAIS DE FÍSICA Embora um corpo com Npartículas possa ter 3Ngraus de liberdade, os vínculos
Corpo rígido Sistema de partículas sujeitas aos vínculos holonômicos 4 - A Dinâmica do corpo rígido TÓPICOS FUNDAMENTAIS DE FÍSICA Embora um corpo com Npartículas possa ter 3Ngraus de liberdade, os vínculos
EXPRESSÃO GRÁFICA AXONOMETRIA ORTOGONAL PASSAGEM DAS VISTAS PARA AXONOMETRIA 1/38
 EXPRESSÃO GRÁFICA AXONOMETRIA ORTOGONAL PASSAGEM DAS VISTAS PARA AXONOMETRIA 1/38 PERSPECTIVAS Perspectiva é uma forma de representar graficamente objetos tridimensionais através de uma única projeção.
EXPRESSÃO GRÁFICA AXONOMETRIA ORTOGONAL PASSAGEM DAS VISTAS PARA AXONOMETRIA 1/38 PERSPECTIVAS Perspectiva é uma forma de representar graficamente objetos tridimensionais através de uma única projeção.
EXPRESSÃO GRÁFICA AXONOMETRIA ORTOGONAL PASSAGEM DAS VISTAS PARA AXONOMETRIA 1/38
 EXPRESSÃO GRÁFICA AXONOMETRIA ORTOGONAL PASSAGEM DAS VISTAS PARA AXONOMETRIA 1/38 PERSPECTIVAS Perspectiva é uma forma de representar graficamente objetos tridimensionais através de uma única projeção.
EXPRESSÃO GRÁFICA AXONOMETRIA ORTOGONAL PASSAGEM DAS VISTAS PARA AXONOMETRIA 1/38 PERSPECTIVAS Perspectiva é uma forma de representar graficamente objetos tridimensionais através de uma única projeção.
1. Encontre as equações simétricas e paramétricas da reta que:
 Universidade Federal de Uberlândia Faculdade de Matemática Disciplina : Geometria Analítica (GMA00) Assunto: retas; planos; interseções de retas e planos; posições relativas entre retas e planos; distância
Universidade Federal de Uberlândia Faculdade de Matemática Disciplina : Geometria Analítica (GMA00) Assunto: retas; planos; interseções de retas e planos; posições relativas entre retas e planos; distância
Modelos Geométricos Transformações
 Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
. Vistas ortográficas: desenhos resultantes das projeções ortogonais do objeto
 1 Curso: Engenharia Disciplina: Desenho Técnico Prof.ª Me. Aline Ribeiro PROJEÇÕES ORTOGONAIS 1. GEOMETRIA DESCRITIVA. Método desenvolvido por Gaspard Monge no século XVIII com o objetivo de representar
1 Curso: Engenharia Disciplina: Desenho Técnico Prof.ª Me. Aline Ribeiro PROJEÇÕES ORTOGONAIS 1. GEOMETRIA DESCRITIVA. Método desenvolvido por Gaspard Monge no século XVIII com o objetivo de representar
3D no OpenGL. Visualização e Transformações Perspectiva. Transformações do Modelview. Processo
 Visualização e Transformações Perspectiva 3D no OpenGL Para gerar imagens de um objeto 3D, é necessário compreender transformações perspectiva Foley & van Dam - Cap. 6 Notas de aula do Prof. Mount: aulas
Visualização e Transformações Perspectiva 3D no OpenGL Para gerar imagens de um objeto 3D, é necessário compreender transformações perspectiva Foley & van Dam - Cap. 6 Notas de aula do Prof. Mount: aulas
Computação Gráfica. Prof. MSc. André Yoshimi Kusumoto
 Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Para que objetos tridimensionais possam ser visualizados é necessário que suas imagens sejam geradas na tela. Para isso,
Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Para que objetos tridimensionais possam ser visualizados é necessário que suas imagens sejam geradas na tela. Para isso,
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 6. Projeções
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
6. Calcular as equações paramétricas de uma reta s que passa pelo ponto A(1, 1, 1) e é ortogonal x 2
 e é ortogonal x 2") Lista 2: Retas, Planos e Distâncias - Engenharia Mecânica Professora: Elisandra Bär de Figueiredo x = 2 + 2t 1. Determine os valores de m para que as retas r : y = mt z = 4 + 5t sejam: (a) ortogonais (b)
Lista 2: Retas, Planos e Distâncias - Engenharia Mecânica Professora: Elisandra Bär de Figueiredo x = 2 + 2t 1. Determine os valores de m para que as retas r : y = mt z = 4 + 5t sejam: (a) ortogonais (b)
Geometria Analítica II - Aula 5 108
 Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
-INF Aula 17 Visualização 3D: Projeções
 Visualiação 3D -INF147- Aula 17 Visualiação 3D: Projeções Modelo geométrico Pipeline de visualiação Imagem Modificado de M.M. Oliveira Visualiação 3D Projeções paralelas e perspectiva câmera Projeção ortográfica
Visualiação 3D -INF147- Aula 17 Visualiação 3D: Projeções Modelo geométrico Pipeline de visualiação Imagem Modificado de M.M. Oliveira Visualiação 3D Projeções paralelas e perspectiva câmera Projeção ortográfica
Projeto e computação gráfica I. Universidade Federal de São João del-rei Pedro Mitsuo Shiroma Sala 119 Bloco 3
 Projeto e computação gráfica I Universidade Federal de São João del-rei Pedro Mitsuo Shiroma Sala 119 Bloco 3 Projeções Aulas 3, 4 e 10 da apostila Telecurso 2000 Capítulos 1 e 2 do livro Desenho técnico
Projeto e computação gráfica I Universidade Federal de São João del-rei Pedro Mitsuo Shiroma Sala 119 Bloco 3 Projeções Aulas 3, 4 e 10 da apostila Telecurso 2000 Capítulos 1 e 2 do livro Desenho técnico
ROBÓTICA (ROB74) AULA 2. TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug
 AULA 2. TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug PROGRAMA Transformações Geométricas e Coordenadas Homogêneas Notações Introdutórias Vetores, matrizes, pontos
ROBÓTICA (ROB74) AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug PROGRAMA Transformações Geométricas e Coordenadas Homogêneas Notações Introdutórias Vetores, matrizes, pontos
SEM DESENHO TÉCNICO MECÂNICO I
 SEM 0564 - DESENHO TÉCNICO MECÂNICO I Notas de Aulas v.2017 Aula 02 Projeção: tipos, vistas e diedros Prof. Assoc. Carlos Alberto Fortulan Departamento de Engenharia Mecânica Escola de Engenharia de São
SEM 0564 - DESENHO TÉCNICO MECÂNICO I Notas de Aulas v.2017 Aula 02 Projeção: tipos, vistas e diedros Prof. Assoc. Carlos Alberto Fortulan Departamento de Engenharia Mecânica Escola de Engenharia de São
4. Curvas Paramétricas e Transformações 2D
 4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
- Aula 6 - Visualização 3D: Projeções
 - Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
- Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
Universidade Federal do Pará Curso de Licenciatura em Matemática PARFOR Lista de Exercícios Referentes a Prova Substitutiva de Geometria Analítica
 1 Universidade Federal do Pará Curso de Licenciatura em Matemática PARFOR Lista de Exercícios Referentes a Prova Substitutiva de Geometria Analítica 1. Determine a distância entre os pontos A(-2, 7) e
1 Universidade Federal do Pará Curso de Licenciatura em Matemática PARFOR Lista de Exercícios Referentes a Prova Substitutiva de Geometria Analítica 1. Determine a distância entre os pontos A(-2, 7) e
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Como desenharemos um objeto Real tridimensional em uma folha de papel?
 1.Questionamento Como desenharemos um objeto Real tridimensional em uma folha de papel? Como faremos se quisermos mandar um desenho de uma peça para um fornecedor ou para outra seção da empresa? Os métodos
1.Questionamento Como desenharemos um objeto Real tridimensional em uma folha de papel? Como faremos se quisermos mandar um desenho de uma peça para um fornecedor ou para outra seção da empresa? Os métodos
Documentação técnica de produto- Vocabulário Parte 2: Termos relativos aos métodos de projeção
 OUT 2004 Projeto Revisão NBR 10647 ABNT Associação Brasileira de Normas Técnicas Sede: Rio de Janeiro Av. Treze de Maio, 13 28º andar CEP 20003-900 Caixa Postal 1680 Rio de Janeiro RJ Tel.: PABX (021)
OUT 2004 Projeto Revisão NBR 10647 ABNT Associação Brasileira de Normas Técnicas Sede: Rio de Janeiro Av. Treze de Maio, 13 28º andar CEP 20003-900 Caixa Postal 1680 Rio de Janeiro RJ Tel.: PABX (021)
Transformações geométricas no plano e no espaço
 Transformações geométricas no plano e no espaço Sistemas de Coordenadas Sistemas de Referência com finalidades específicas: SRU Sistema de Referência do Universo SRO Sistema de Referência do Objeto SRN
Transformações geométricas no plano e no espaço Sistemas de Coordenadas Sistemas de Referência com finalidades específicas: SRU Sistema de Referência do Universo SRO Sistema de Referência do Objeto SRN
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III
 UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
P E R S P E C T I V A S
 P E R S P E C T I V A S Definição de perspectiva : Ciência da representação gráfica dos objetos com o aspecto visto por nossos olhos. A palavra perspectiva vem do latim - Perspicere (ver através de) e
P E R S P E C T I V A S Definição de perspectiva : Ciência da representação gráfica dos objetos com o aspecto visto por nossos olhos. A palavra perspectiva vem do latim - Perspicere (ver através de) e
Perspectiva / / Perspectiva Isométrica. Fonte: Miceli, Perspectiva Cavaleira. Fonte: Miceli, 2008.
 Perspectiva De acordo com MICELI (2008) a Perspectiva é o método de representação gráfica dos objetos que apresenta sua forma no modo mais próximo como são vistos. É uma representação tridimensional que
Perspectiva De acordo com MICELI (2008) a Perspectiva é o método de representação gráfica dos objetos que apresenta sua forma no modo mais próximo como são vistos. É uma representação tridimensional que
BC Geometria Analítica. Lista 4
 BC0404 - Geometria Analítica Lista 4 Nos exercícios abaixo, deve-se entender que está fixado um sistema de coordenadas cartesianas (O, E) cuja base E = ( i, j, k) é ortonormal (e positiva, caso V esteja
BC0404 - Geometria Analítica Lista 4 Nos exercícios abaixo, deve-se entender que está fixado um sistema de coordenadas cartesianas (O, E) cuja base E = ( i, j, k) é ortonormal (e positiva, caso V esteja
Notas de Aula - Fascículo 02 Dualidade e Geometria Projetiva Tridimensional
 Tópicos em Computação Gráfica Notas de Aula - Fascículo 02 Dualidade e Geometria Projetiva Tridimensional Jorge Stolfi c 2009 Jorge Stolfi - Universidade Estadual de Campinas. É permitida a reprodução
Tópicos em Computação Gráfica Notas de Aula - Fascículo 02 Dualidade e Geometria Projetiva Tridimensional Jorge Stolfi c 2009 Jorge Stolfi - Universidade Estadual de Campinas. É permitida a reprodução
Curso Superior de Tecnologia em Refrigeração, Ventilação e Ar Condicionado Disciplina: Desenho Técnico Tema: Projeções, Perspectivas, Vistas e
 Curso Superior de Tecnologia em Refrigeração, Ventilação e Ar Condicionado Disciplina: Desenho Técnico Tema: Projeções, Perspectivas, Vistas e Diedros Profº Milton 2014 Projeções Utiliza-se de projeções
Curso Superior de Tecnologia em Refrigeração, Ventilação e Ar Condicionado Disciplina: Desenho Técnico Tema: Projeções, Perspectivas, Vistas e Diedros Profº Milton 2014 Projeções Utiliza-se de projeções
Vetores no plano Cartesiano
 Vetores no plano Cartesiano 1) Definição de vetor Um vetor (geométrico) no plano R² é uma classe de objetos matemáticos (segmentos) com a mesma direção, mesmo sentido e mesmo módulo (intensidade). 1. A
Vetores no plano Cartesiano 1) Definição de vetor Um vetor (geométrico) no plano R² é uma classe de objetos matemáticos (segmentos) com a mesma direção, mesmo sentido e mesmo módulo (intensidade). 1. A
Aula Orientação do espaço. Observação 1
 Aula 14 Nesta aula vamos definir dois novos produtos entre vetores do espaço, o produto vetorial e o produto misto. Para isso, primeiro vamos apresentar o conceito de orientação. 1. Orientação do espaço
Aula 14 Nesta aula vamos definir dois novos produtos entre vetores do espaço, o produto vetorial e o produto misto. Para isso, primeiro vamos apresentar o conceito de orientação. 1. Orientação do espaço
DESENHO TÉCNICO MECÂNICO I. Aula 02 Projeção, vistas, diedros. Desenho Técnico Mecânico I
 DESENHO TÉCNICO MECÂNICO I Aula 02 Projeção, vistas, diedros PROJEÇÕES Utiliza-se de projeções para comunicar a forma de um desenho 3D (três dimensões) em uma folha de papel (2D duas dimensões). São envolvidos
DESENHO TÉCNICO MECÂNICO I Aula 02 Projeção, vistas, diedros PROJEÇÕES Utiliza-se de projeções para comunicar a forma de um desenho 3D (três dimensões) em uma folha de papel (2D duas dimensões). São envolvidos
Transformações Geométricas para Visualização 3D
 Sistemas Gráficos para Engenharia - M. Gattass & L. F. Martha Março - 8 Transformações Geométricas para Visualiação 3D por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando
Sistemas Gráficos para Engenharia - M. Gattass & L. F. Martha Março - 8 Transformações Geométricas para Visualiação 3D por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando
DTE0003 Desenho Técnico Aula#10
 CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENGENHARIA DE PRODUÇÃO E SISTEMAS DTE0003 Desenho Técnico Aula#10 Professor Claudio Decker Junior claudio.decker@udesc.br PROJEÇÕES ORTOGONAIS http://www.youtube.com/watch?v=yogme48af8g
CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENGENHARIA DE PRODUÇÃO E SISTEMAS DTE0003 Desenho Técnico Aula#10 Professor Claudio Decker Junior claudio.decker@udesc.br PROJEÇÕES ORTOGONAIS http://www.youtube.com/watch?v=yogme48af8g
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Perspectiva. Perspectiva Isométrica. Fonte: Miceli, Perspectiva Cavaleira. Fonte: Miceli, 2008.
 Perspectiva De acordo com MICELI (2008) a Perspectiva é o método de representação gráfica dos objetos que apresenta sua forma no modo mais próximo como são vistos. É uma representação tridimensional que
Perspectiva De acordo com MICELI (2008) a Perspectiva é o método de representação gráfica dos objetos que apresenta sua forma no modo mais próximo como são vistos. É uma representação tridimensional que
Conceitos de vetores. Decomposição de vetores
 Conceitos de vetores. Decomposição de vetores 1. Introdução De forma prática, o conceito de vetor pode ser bem assimilado com auxílio da representação matemática de grandezas físicas. Figura 1.1 Grandezas
Conceitos de vetores. Decomposição de vetores 1. Introdução De forma prática, o conceito de vetor pode ser bem assimilado com auxílio da representação matemática de grandezas físicas. Figura 1.1 Grandezas
Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC
 Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC Introdução à Mecânica do Contínuo Tensores Professor: Márcio André Araújo Cavalcante
Universidade Federal de Alagoas UFAL Centro de Tecnologia - CTEC Programa de Pós-Graduação em Engenharia Civil - PPGEC Introdução à Mecânica do Contínuo Tensores Professor: Márcio André Araújo Cavalcante
7. Projeções Geométricas e Visualização 3D
 7. Projeções Geométricas e Visualização 3D Aprendemos a criar e transformar geometricamente objetos 3D, no entanto, nossa janela de visualização é apenas bi-dimensional. Assim, necessitamos desenvolver
7. Projeções Geométricas e Visualização 3D Aprendemos a criar e transformar geometricamente objetos 3D, no entanto, nossa janela de visualização é apenas bi-dimensional. Assim, necessitamos desenvolver
Projeções paralelas. Professor: João Carmo
 Projeções paralelas Professor: João Carmo Projeções paralelas Introdução As múltiplas vistas (projeções ortogonais) não mostram, de forma direta, a configuração tridimensional do objeto. Elas são mais
Projeções paralelas Professor: João Carmo Projeções paralelas Introdução As múltiplas vistas (projeções ortogonais) não mostram, de forma direta, a configuração tridimensional do objeto. Elas são mais
Introdução à Computação Gráfica
 Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
1. Projeções e Vistas Principais
 1. Projeções e Vistas Principais Este capítulo complementa as aulas do telecurso que mostram como obter as projeções das vistas ortográficas principais tendo em vista as normas: NBR 8403 Aplicação de linhas
1. Projeções e Vistas Principais Este capítulo complementa as aulas do telecurso que mostram como obter as projeções das vistas ortográficas principais tendo em vista as normas: NBR 8403 Aplicação de linhas
Transformações Geométricas 3D
 Transformações Geométricas 3D Introdução Transformações 3D são uma etensão dos métodos 2D, incluindo-se a coordenada Z. Especificação de vetores em 3D translação: vetor de translação 3D escalonamento:
Transformações Geométricas 3D Introdução Transformações 3D são uma etensão dos métodos 2D, incluindo-se a coordenada Z. Especificação de vetores em 3D translação: vetor de translação 3D escalonamento:
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA PROF. ANDERSON ROGES TEIXEIRA GÓES GEOMETRIA NO ENSINO
 UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA PROF. ANDERSON ROGES TEIXEIRA GÓES GEOMETRIA NO ENSINO Representações Geométricas Uma das formas de comunicação
UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA PROF. ANDERSON ROGES TEIXEIRA GÓES GEOMETRIA NO ENSINO Representações Geométricas Uma das formas de comunicação
Pipeline de Visualização 3D
 Pipeline de Visualização 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Processo de Visualização https://www.youtube.com/watch?v=ogqam2mykng Processo de
Pipeline de Visualização 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Processo de Visualização https://www.youtube.com/watch?v=ogqam2mykng Processo de
1 Vetores no Plano e no Espaço
 1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
Aula de Problemas 1. Problema 1. Demonstre o teorema de Pitágoras (geometria euclidiana):
:") Aula de Problemas 1 Problema 1 Demonstre o teorema de Pitágoras (geometria euclidiana): sin cos 1. Mostre que outra forma de exprimir este teorema é a seguinte: ab ab a b, em que ab, 3. Faz-se a a e b
Aula de Problemas 1 Problema 1 Demonstre o teorema de Pitágoras (geometria euclidiana): sin cos 1. Mostre que outra forma de exprimir este teorema é a seguinte: ab ab a b, em que ab, 3. Faz-se a a e b
Transformações Geométricas
 Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Transformações de Pontos. Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles
 Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
A perspectiva geométrica é uma projeção que resulta numa imagem semelhante aquela vista pelo nosso sentido da visão.
 PERSPECTIVA GEOMÉTRICA OU EXATA A. Introdução B. Elementos C. Tipos: paralela ou axonométrica / cônica D. Projeção paralela: isométrica, militar, cavaleira. A. Na perspectiva geométrica Utilizamos os sistemas
PERSPECTIVA GEOMÉTRICA OU EXATA A. Introdução B. Elementos C. Tipos: paralela ou axonométrica / cônica D. Projeção paralela: isométrica, militar, cavaleira. A. Na perspectiva geométrica Utilizamos os sistemas
Rotações em 3D. Descrição dos problemas. Como mover entre 2 frames. Ângulos de Euler. Foley Notas do Dave (lecture 29)
") Descrição dos problemas Rotações em 3D Foley 21.1.3 Notas do Dave (lecture 29) 1- Como parametrizar rotações 3D? em animações, para criar um movimento suave. translações e rotacões 2D são simples, mas
Descrição dos problemas Rotações em 3D Foley 21.1.3 Notas do Dave (lecture 29) 1- Como parametrizar rotações 3D? em animações, para criar um movimento suave. translações e rotacões 2D são simples, mas
UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA
 1 UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA 1 a Lista de exercícios MAT 41 - Cálculo III - 01/II Coordenadas no espaço 1. Determinar o lugar geométrico
1 UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA 1 a Lista de exercícios MAT 41 - Cálculo III - 01/II Coordenadas no espaço 1. Determinar o lugar geométrico
Representação Gráfica
 Vetores Vetores: uma ferramenta matemática para expressar grandezas Grandezas escalares e vetoriais; Anotação vetorial; Álgebra vetorial; Produtos escalar e vetorial. Grandezas Físicas Grandezas Escalares:
Vetores Vetores: uma ferramenta matemática para expressar grandezas Grandezas escalares e vetoriais; Anotação vetorial; Álgebra vetorial; Produtos escalar e vetorial. Grandezas Físicas Grandezas Escalares:
10 Visualização em 3D - Projeções
 INSTITUTO DE CIÊNCIAS MATEMÁTICAS E DE COMPUTAÇÃO DEPARTAMENTO DE CIÊNCIAS DE COMPUTAÇÃO E ESTATÍSTICA 10 Visualização em 3D - Projeções Após a criação de cenas e objetos tridimensionais o próximo passo
INSTITUTO DE CIÊNCIAS MATEMÁTICAS E DE COMPUTAÇÃO DEPARTAMENTO DE CIÊNCIAS DE COMPUTAÇÃO E ESTATÍSTICA 10 Visualização em 3D - Projeções Após a criação de cenas e objetos tridimensionais o próximo passo
Resumo. Maria Bernardete Barison apresenta Perspectivas em Geometria Descritiva. Geométrica vol.2 n PERSPECTIVAS
 1 PERSPECTIVAS PERSPECTIVAS A palavra perspectiva vem do latim - Perspicere (ver através de). Se você se colocar atrás de uma janela envidraçada e, sem se mover do lugar, riscar no vidro o que está "vendo
1 PERSPECTIVAS PERSPECTIVAS A palavra perspectiva vem do latim - Perspicere (ver através de). Se você se colocar atrás de uma janela envidraçada e, sem se mover do lugar, riscar no vidro o que está "vendo
MAT 121 : Cálculo Diferencial e Integral II. Sylvain Bonnot (IME-USP)
") MAT 121 : Cálculo Diferencial e Integral II Sylvain Bonnot (IME-USP) 2014 1 Forma polar geral de uma secção cônica Teorema Seja F um ponto fixado no plano ( foco ) e l uma reta fixada ( diretriz ) e e
MAT 121 : Cálculo Diferencial e Integral II Sylvain Bonnot (IME-USP) 2014 1 Forma polar geral de uma secção cônica Teorema Seja F um ponto fixado no plano ( foco ) e l uma reta fixada ( diretriz ) e e
GAAL /1 - Simulado - 2 produto escalar, produto vetorial, retas e planos. Exercício 1: Determine a equação do plano em cada situação descrita.
 GAAL - 2013/1 - Simulado - 2 produto escalar, produto vetorial, retas e planos SOLUÇÕES Exercício 1: Determine a equação do plano em cada situação descrita. (a) O plano passa pelo ponto A = (2, 0, 2) e
GAAL - 2013/1 - Simulado - 2 produto escalar, produto vetorial, retas e planos SOLUÇÕES Exercício 1: Determine a equação do plano em cada situação descrita. (a) O plano passa pelo ponto A = (2, 0, 2) e
1 Segmentos orientados e vetores, adição e multiplicação
 MAP2110 Modelagem e Matemática 1 o Semestre de 2007 Resumo 1 - Roteiro de estudos - 07/05/2007 Espaços vetoriais bi e tri-dimensionais (plano ou espaço bidimensional E 2, e espaço tridimensional E 3 )
MAP2110 Modelagem e Matemática 1 o Semestre de 2007 Resumo 1 - Roteiro de estudos - 07/05/2007 Espaços vetoriais bi e tri-dimensionais (plano ou espaço bidimensional E 2, e espaço tridimensional E 3 )
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
MAT 112 Vetores e Geometria. Prova SUB C
 MAT 112 Vetores e Geometria Prof. Paolo Piccione 02 de julho de 2019 Prova SUB C Turmas: 2019146 e 2019134 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos.
MAT 112 Vetores e Geometria Prof. Paolo Piccione 02 de julho de 2019 Prova SUB C Turmas: 2019146 e 2019134 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos.
Geometria Analítica. Estudo do Plano. Prof Marcelo Maraschin de Souza
 Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Analítica. Geometria Analítica 28/08/2012
 Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação