Controle I. Análise de resposta transitória Sistemas de primeira ordem
|
|
|
- Bernardo Santarém Igrejas
- 8 Há anos
- Visualizações:
Transcrição
1 Controle I Análise de resposta transitória Sistemas de primeira ordem


2

3
4

5 input S output Sistemas de primeira ordem Sistema de primeira ordem do tipo G (s) a bs c

6 input a bs c output Sistemas de primeira ordem ou seja: Y (s ) R (s) a bs c Ko Y (s ) R (s) a c ( bs c ) c a c b s 1 c, T
 a c ( bs c ) c a c b s 1")
7 input a bs Ts c 1 output Sistemas de primeira ordem ou seja: a função de transferência pode ser reescrita como: Y (s) R (s) Ts 1
")
8 input Ts 1 output Sistemas de primeira ordem Ko = ganho do sistema T = constante de tempo do sistema a função de transferência: Y (s) R (s) Ts 1

9 Exemplo 1: Análise no domínio do tempo - Sistemas de 1ª ordem Y(s) 2 R (s) 5s 4 = 2/4 = 0,5 T = 5/4 = 1,25 polo: s = 0,8 Exemplo 2: Y (s) R (s) 12 s 4 polo: s = 4 = 3 T = ¼ = 0,25
 R (s) 12 s 4 polo: s = 4 = 3 T = ¼")
10 input Ts 1 output Sistemas de primeira ordem r(t) = Entrada degrau unitário Qual é a resposta ao degrau?

11 input Ts 1 output Sistemas de primeira ordem para calcular fazemos: Y(s) Ts 1 R (s) Y(s) K 1 o (Ts 1) s K T o s (Ts 1)
 s K T o s (Ts 1)")
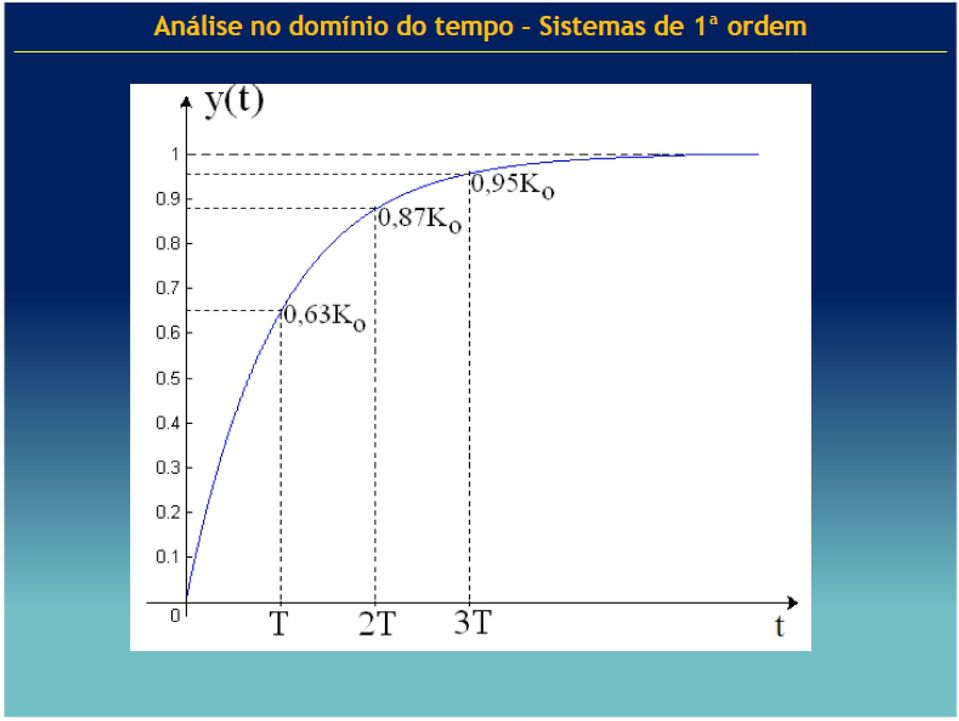
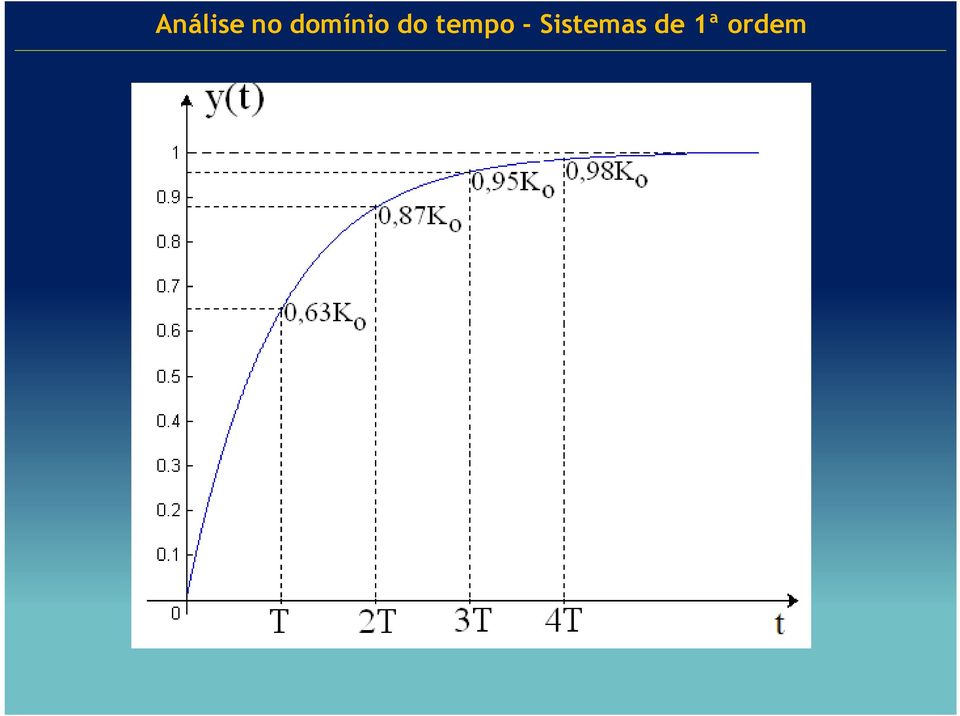
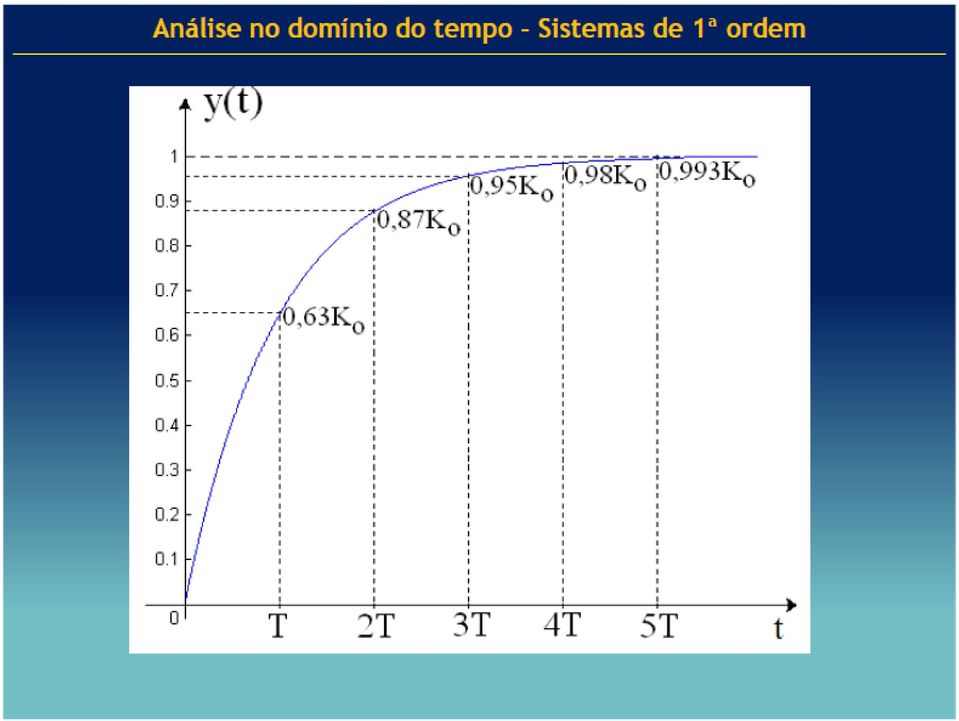
12 input Ts 1 output Sistemas de primeira ordem y(t) L 1 Y(s) logo, a resposta ao degrau unitário é: y(t) (1 e t / T ), t 0
 (1 e t / T")
13 input Ts 1 output Sistemas de primeira ordem r(t) = a resposta ao degrau unitário é: y(t) K (1 e t / T ), o t 0 entrada degrau unitário
, o t 0 entrada degrau")
14 a resposta ao degrau unitário é: y(t) K (1 e t / T ), o t 0
 K (1 e t")
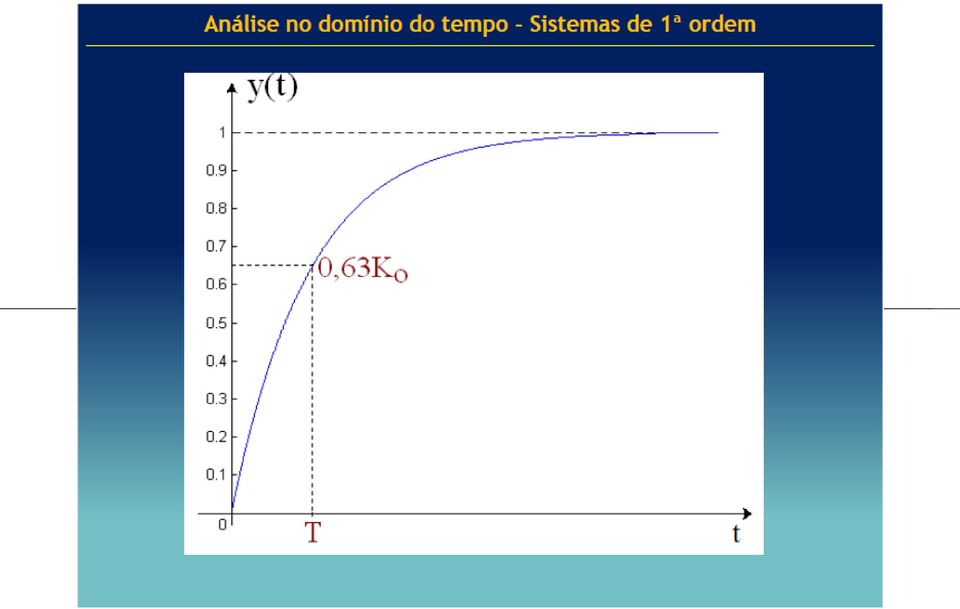
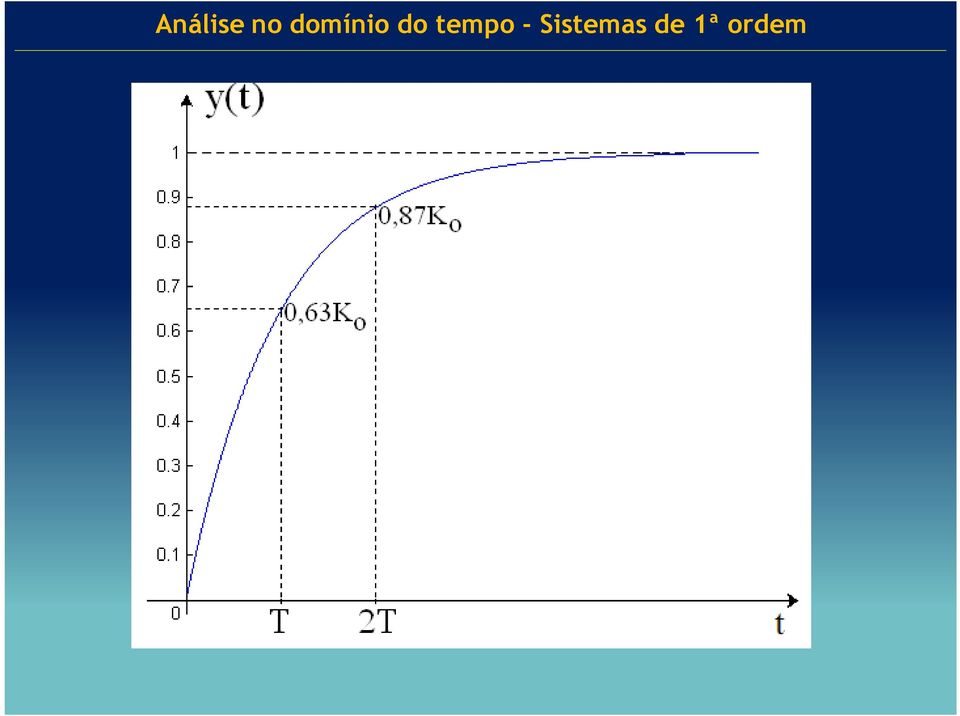
15 Observe que, para a resposta ao degrau unitário: y(t) K (1 e t / T ), o t 0 Se t T y(t) K (1 e 1 ) 0,632 o Se t 2T Se t 3T Se t 4T Se t =5T y(2t) K (1 e 2 ) 0,865 o y(3t) K (1 e 3 ) 0,95 o y(4t) K (1 e 4 ) 0,982 o y(5t) K (1 e 5 ) 0,993 o
 0,95 o y(4t) K (1 e 4 ) 0,982 o y(5t) K (1 e 5 ) 0,993")
16
17

18
19
20
21 input Ts 1 output Sistemas de primeira ordem r(t) = Entrada impulso unitário Qual é a resposta ao impulso?
22 para calcular fazemos: input Ts 1 output Sistemas de primeira ordem Y(s) Ts 1 R (s) Y(s) (Ts 1) 1 (Ts 1)
23 input Ts 1 output Sistemas de primeira ordem y(t) L 1 Y(s) logo, a resposta ao impulso unitário é: y(t) e t / T T, t 0
24 input Ts 1 output Sistemas de primeira ordem r(t) = a resposta ao impulso unitário é: K y(t) o e t / T, T t 0 Entrada impulso unitário
25 a resposta ao impulso unitário é: y(t) e t / T, T t 0
26 Observe que, para a resposta ao impulso: Se t T Se t 2T Se t 3T Se t 4T Se t 5T y(t) e t / T, T t 0 y(t) e 1 0,368 ( /T) y(2t) e 2 0,135 ( /T) y(3t) e 3 0,05 ( /T) y(4t) e 4 0,02 ( /T) y(5t) e 5 0,007 ( / T)
27
28

29
30

31
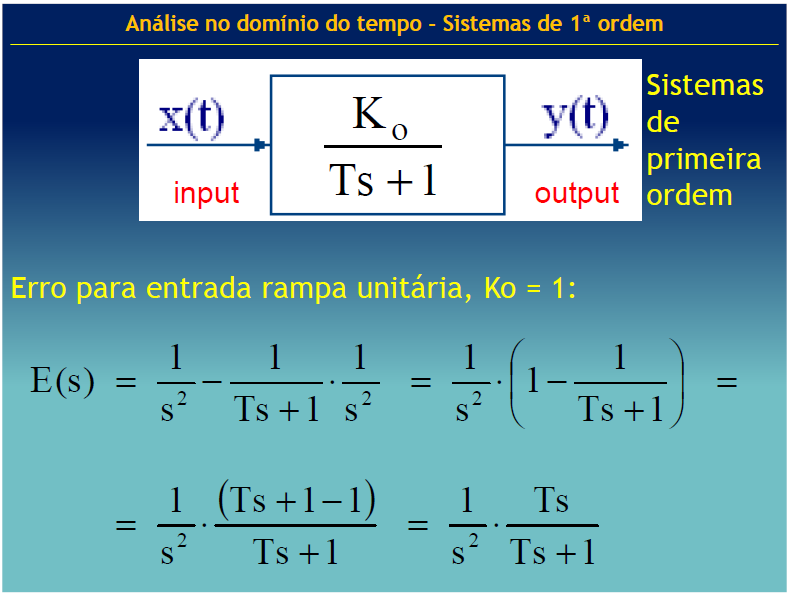
32 input Ts 1 output Sistemas de primeira ordem r(t) = Entrada rampa unitária Qual é a resposta à rampa?
33 input Ts 1 output Sistemas de primeira ordem para calcular fazemos: Y(s) Ts 1 R (s) Y(s) 1 K 2 ot K o T (Ts 1) s 2 s 2 s (Ts 1)
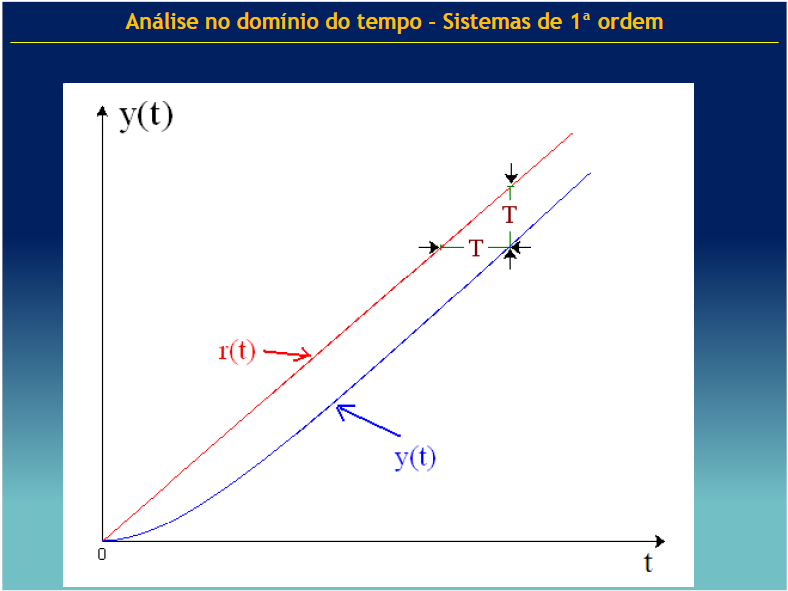
34 input Ts 1 output Sistemas de primeira ordem y(t) L 1 Y(s) logo, a resposta à rampa unitária é: y(t) (t T T e t / T ), t 0
35 input Ts 1 output Sistemas de primeira ordem Se Ko = 1, a resposta à rampa unitária é: y(t) t T T e t / T, t 0
36 input Ts 1 output Sistemas de primeira ordem r(t) = resposta à rampa unitária para = 1: y(t) t T T e t / T, t 0 Entrada rampa unitária
37 para a entrada rampa unitária, a saída é: t T T e t / T, t 0 1
38 para a entrada rampa unitária, a saída é: t T T e t / T, t 0 1
39
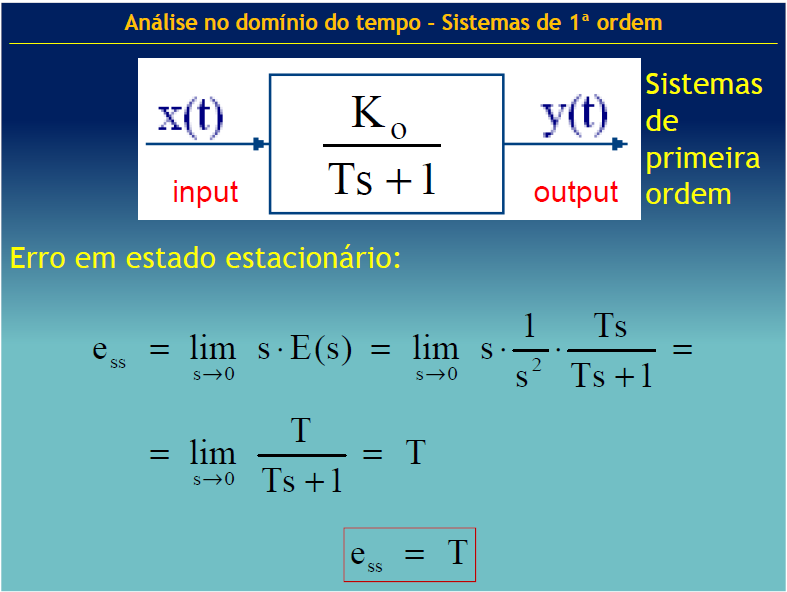
40 Erro p/ entrada rampa unitária
41
42
43 Erro p/ entrada rampa unitária
44
45
46
47 Referências Bibliográficas [1] Ogata, K., Engenharia de Controle Moderno, Ed. Prentice-Hall. [2] de Souza, J. A. M., Controle de Sistemas, notas de aula. [3] Dorf, Richard C. Modern control system. Addison-Wesley Publishing Company. [4] Kuo, Benjamim C.: Sistemas de controle moderno, Editora Prentice Hall do Brasil.
Aula 06 Análise no domínio do tempo Parte I Sistemas de 1ª ordem
 Aula 06 Análise n dmíni d temp Parte I Sistemas de 1ª rdem input S utput Sistemas de primeira rdem Sistema de primeira rdem d tip a G(s) bs + c input a bs + c utput Sistemas de primeira rdem u seja: Y(s)
Aula 06 Análise n dmíni d temp Parte I Sistemas de 1ª rdem input S utput Sistemas de primeira rdem Sistema de primeira rdem d tip a G(s) bs + c input a bs + c utput Sistemas de primeira rdem u seja: Y(s)
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Análise de Erro Estacionário
 Análise de Erro Estacionário Sistema de controle pode apresentar erro estacionário devido a certos tipos de entrada. Um sistema pode não apresentar erro estacionário a uma determinada entrada, mas apresentar
Análise de Erro Estacionário Sistema de controle pode apresentar erro estacionário devido a certos tipos de entrada. Um sistema pode não apresentar erro estacionário a uma determinada entrada, mas apresentar
5 Transformadas de Laplace
 5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
Desempenho de Sistemas de Controle Realimentados
 Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
SISTEMAS DE CONTROLO. Objectivos Pedagógicos
 SISTEMAS DE CONTROLO Responsável: Prof. Doutor João Miguel Gago Pontes de Brito Lima Atendimento (Gab. 2.63): Terça e Quarta das 11:00 à 13:00 Objectivos Pedagógicos Pretende-se com esta disciplina fornecer
SISTEMAS DE CONTROLO Responsável: Prof. Doutor João Miguel Gago Pontes de Brito Lima Atendimento (Gab. 2.63): Terça e Quarta das 11:00 à 13:00 Objectivos Pedagógicos Pretende-se com esta disciplina fornecer
PRINCÍPIOS DE SISTEMAS DE CONTROLE. Semestral 60 horas Sistema de avaliação: I
 PRINCÍPIOS DE SISTEMAS DE CONTROLE Semestral 60 horas Sistema de avaliação: I EMENTA Conceitos, definições, classificação, realimentação, descrição, terminologia, procedimentos de projeto e caracterização
PRINCÍPIOS DE SISTEMAS DE CONTROLE Semestral 60 horas Sistema de avaliação: I EMENTA Conceitos, definições, classificação, realimentação, descrição, terminologia, procedimentos de projeto e caracterização
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Controle e Sistemas Não lineares
 Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Aula 07 Análise no domínio do tempo Parte II Sistemas de 2ª ordem
 Aula 07 Aálise o domíio do tempo Parte II Sistemas de ª ordem Aálise o domíio do tempo - Sistemas de ª ordem iput S output Sistema de seguda ordem do tipo α G(s) as + bs + c Aálise o domíio do tempo -
Aula 07 Aálise o domíio do tempo Parte II Sistemas de ª ordem Aálise o domíio do tempo - Sistemas de ª ordem iput S output Sistema de seguda ordem do tipo α G(s) as + bs + c Aálise o domíio do tempo -
Circuitos Elétricos III
 Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais A Transformada de Laplace em análise de circuitos parte 2 Equivalente
Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais A Transformada de Laplace em análise de circuitos parte 2 Equivalente
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação
 Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
Fundamentos de Controle
 Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Capítulo 3 Sistemas de Controle com Realimentação
 Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Controle de Sistemas I
 Controle de Sistemas I Sinais e Sistemas - Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário
Controle de Sistemas I Sinais e Sistemas - Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE PRÓ-REITORIA DE GRADUAÇÃO CADASTRO DE DISCIPLINAS
 CADASTRO DE S Créditos Carga Horária ELE0521 Sistemas de Controle I Tot Aul Lab Est Tot Aul Lab Est 4 4 60 60 P/C P ELE0506 Circuitos Elétricos P DCA0304 Métodos Computacionais em Engenharia ELE0321 Sistemas
CADASTRO DE S Créditos Carga Horária ELE0521 Sistemas de Controle I Tot Aul Lab Est Tot Aul Lab Est 4 4 60 60 P/C P ELE0506 Circuitos Elétricos P DCA0304 Métodos Computacionais em Engenharia ELE0321 Sistemas
Toolbox de Sistemas de Controle MATLAB
 Toolbox de Sistemas de Controle MATLAB Control System Toolbox Grupo PET Engenharia Elétrica UFMS Campo Grande MS Junho - 2003 2 Índice Índice 3 1. Introdução 4 2. Representação dos Sistemas 5 2.1. Representação
Toolbox de Sistemas de Controle MATLAB Control System Toolbox Grupo PET Engenharia Elétrica UFMS Campo Grande MS Junho - 2003 2 Índice Índice 3 1. Introdução 4 2. Representação dos Sistemas 5 2.1. Representação
ANÁLISE LINEAR DE SISTEMAS
 ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
11/07/2012. Professor Leonardo Gonsioroski FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA.
 FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
Transformada de Laplace. Parte 3
 Transformada de Laplace Parte 3 Elementos de circuito no domínio da frequência O resistor no domínio da frequência Pela lei de OHM : v= Ri A transformada da equação acima é V(s) = R I(s) O indutor no domínio
Transformada de Laplace Parte 3 Elementos de circuito no domínio da frequência O resistor no domínio da frequência Pela lei de OHM : v= Ri A transformada da equação acima é V(s) = R I(s) O indutor no domínio
Controlador PID: algoritmo, estrutura e sintonia
 Controlador PID: algoritmo, estrutura e sintonia Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 05 de setembro de 2018. Sumário 1 Introdução
Controlador PID: algoritmo, estrutura e sintonia Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 05 de setembro de 2018. Sumário 1 Introdução
Desempenho de Sistemas de Controle Realimentados
 Desempenho de Sistemas de Controle Realimentados 1. Exemplo de projeto: controle de posicionamento do telescópio Hubble 2. Usando MATLAB c 3. Exemplo de projeto seqüêncial: sistema de leitura de um acionador
Desempenho de Sistemas de Controle Realimentados 1. Exemplo de projeto: controle de posicionamento do telescópio Hubble 2. Usando MATLAB c 3. Exemplo de projeto seqüêncial: sistema de leitura de um acionador
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Gestão de Projectos de Software - 1
 Gestão de Projectos de Software Licenciaturas de EI / IG 2012/2013-4º semestre msantos@ispgaya.pt http://paginas.ispgaya.pt/~msantos Gestão de Projectos de Software - 1 Objectivos da Disciplina de Gestão
Gestão de Projectos de Software Licenciaturas de EI / IG 2012/2013-4º semestre msantos@ispgaya.pt http://paginas.ispgaya.pt/~msantos Gestão de Projectos de Software - 1 Objectivos da Disciplina de Gestão
SISTEMAS DE CONTROLE II
 SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular ANÁLISE DE SISTEMAS Ano Lectivo 2014/2015
 Programa da Unidade Curricular ANÁLISE DE SISTEMAS Ano Lectivo 2014/2015 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Informática 3. Ciclo de Estudos 1º 4. Unidade
Programa da Unidade Curricular ANÁLISE DE SISTEMAS Ano Lectivo 2014/2015 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Informática 3. Ciclo de Estudos 1º 4. Unidade
Sinais e Sistemas. Sinais e Sistemas Fundamentos. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Impulso Unitário Discreto 1 Impulso Unitário Discreto 0.9 0.8 δ[ n] 1,
Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Impulso Unitário Discreto 1 Impulso Unitário Discreto 0.9 0.8 δ[ n] 1,
Sinais e Sistemas. Sinais e Sistemas Fundamentos. Renato Dourado Maia. Faculdade de Ciência e Tecnologia de Montes Claros
 Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário Discreto
Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário Discreto
V. ANÁLISE NO DOMÍNIO DO TEMPO
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Sistemas de Controle (CON) Introdução aos Sistemas de Controle
 Introdução aos Sistemas de Controle") Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Introdução aos Sistemas de Controle Aula 01 2013/2
Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Introdução aos Sistemas de Controle Aula 01 2013/2
Estabilidade de sistemas de controle lineares invariantes no tempo
 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
Aula 8 Controladores do tipo Proporcional, Integral e Diferencial
 Aula 8 Controladores do tipo Proporcional, Integral e Diferencial Introdução Estrutura do Controlador PID Efeito da Ação Proporcional Efeito da Ação Integral Efeito da Ação Derivativa Sintonia de Controladores
Aula 8 Controladores do tipo Proporcional, Integral e Diferencial Introdução Estrutura do Controlador PID Efeito da Ação Proporcional Efeito da Ação Integral Efeito da Ação Derivativa Sintonia de Controladores
Aula 8. Cristiano Quevedo Andrea 1. Curitiba, Abril de DAELT - Departamento Acadêmico de Eletrotécnica
 Classificaçã dos Sistemas de Controle Especificaçõe do Estado Estacionário de Erro Aula 8 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico
Classificaçã dos Sistemas de Controle Especificaçõe do Estado Estacionário de Erro Aula 8 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico
Sistemas de Controle
 Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Estabilidade de sistemas de controle lineares invariantes no tempo
 Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Aula 1: Apresentação e contextualização
 Aula 1: Apresentação e contextualização prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 8 de agosto de 2017. prof. Dr. Eduardo Bento Pereira (UFSJ) Controle
Aula 1: Apresentação e contextualização prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 8 de agosto de 2017. prof. Dr. Eduardo Bento Pereira (UFSJ) Controle
Engenharia Mecânica com linha de formação específica em Engenharia Mecatrônica
 Unidade Universitária Escola de Engenharia Curso Engenharia Mecânica com linha de formação específica em Engenharia Mecatrônica Disciplina Circuitos Elétricos Professor(es) Cintia Bertoni Bueno Martha
Unidade Universitária Escola de Engenharia Curso Engenharia Mecânica com linha de formação específica em Engenharia Mecatrônica Disciplina Circuitos Elétricos Professor(es) Cintia Bertoni Bueno Martha
Projeto e simulação de um controlador digital para um sistema aeroestabilizador
 JAN. FEV. MAR. l 007 l ANO XIII, Nº 48 l 61-65 INTEGRAÇÃO 61 Projeto e simulação de um controlador digital para um sistema aeroestabilizador ALEXANDRE BRINCALEPE CAMPO* Resumo l Neste trabalho é descrito
JAN. FEV. MAR. l 007 l ANO XIII, Nº 48 l 61-65 INTEGRAÇÃO 61 Projeto e simulação de um controlador digital para um sistema aeroestabilizador ALEXANDRE BRINCALEPE CAMPO* Resumo l Neste trabalho é descrito
5. DESENVOLVIMENTO Modelagem prática do motor CC
 1 1. RESUMO Neste trabalho, de vertente científica e tecnológica, estuda-se e modela um motor de corrente contínua (CC) pelo método de modelagem experimental de Hägglund e utiliza uma nova proposta de
1 1. RESUMO Neste trabalho, de vertente científica e tecnológica, estuda-se e modela um motor de corrente contínua (CC) pelo método de modelagem experimental de Hägglund e utiliza uma nova proposta de
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular ALGORITMOS E ESTRUTURAS DE DADOS Ano Lectivo 2010/2011
 Programa da Unidade Curricular ALGORITMOS E ESTRUTURAS DE DADOS Ano Lectivo 2010/2011 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Informática 3. Ciclo de Estudos
Programa da Unidade Curricular ALGORITMOS E ESTRUTURAS DE DADOS Ano Lectivo 2010/2011 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Informática 3. Ciclo de Estudos
Indice. Resposta forçada (condições iniciais nulas)
") Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA*
 ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
APRESENTAÇÃO DA DISCIPLINA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
PROGRAMA DA DISCIPLINA
 Curso: Engenharia Electrotécnica Ano Lectivo 2002/2003 Disciplina: Teoria do Sinal Ano Curricular 2 U.C. 3 Área Científica: Telecomunicações e Processamento de Sinal Regime: Anual Docentes: Luís Filipe
Curso: Engenharia Electrotécnica Ano Lectivo 2002/2003 Disciplina: Teoria do Sinal Ano Curricular 2 U.C. 3 Área Científica: Telecomunicações e Processamento de Sinal Regime: Anual Docentes: Luís Filipe
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
Caderno de Exercícios
 Caderno de Exercícios Orlando Ferreira Soares Índice Caracterização de Sinais... Caracterização de Sistemas...0 Sistemas LIT - Convolução...5 Série de Fourier para Sinais Periódicos Contínuos...0 Transformada
Caderno de Exercícios Orlando Ferreira Soares Índice Caracterização de Sinais... Caracterização de Sistemas...0 Sistemas LIT - Convolução...5 Série de Fourier para Sinais Periódicos Contínuos...0 Transformada
Desenvolvimento de protótipos didáticos para o estudo da teoria de controle digital
 OUT. NOV. DEZ. 2005 ANO XI, Nº 43 347-351 INTEGRAÇÃO 347 Desenvolvimento de protótipos didáticos para o estudo da teoria de controle digital ALEXANDRE BRINCALEPE CAMPO* Resumo A disseminação de diversas
OUT. NOV. DEZ. 2005 ANO XI, Nº 43 347-351 INTEGRAÇÃO 347 Desenvolvimento de protótipos didáticos para o estudo da teoria de controle digital ALEXANDRE BRINCALEPE CAMPO* Resumo A disseminação de diversas
Cálculo da resposta no domínio do tempo: o papel dos pólos e zeros
 Capítulo Cálculo da resposta no domínio do tempo: o papel dos pólos e zeros. Introdução O cálculo da resposta no domínio do tempoy(t) de um sistemag(t) pode ser calculado através da integral de convolução:
Capítulo Cálculo da resposta no domínio do tempo: o papel dos pólos e zeros. Introdução O cálculo da resposta no domínio do tempoy(t) de um sistemag(t) pode ser calculado através da integral de convolução:
RELATÓRIO FINAL: PROJETO DESAFIO CONTROLE DE POSIÇÃO DE UMA VÁLVULA
 RELATÓRIO FINAL: PROJETO DESAFIO CONTROLE DE POSIÇÃO DE UMA VÁLVULA Laboratório de Controle e Automação 1 ( LECI 1 ) Professor: Reinaldo Martinez Palhares Integrantes: Henrique Goseling Araújo, Hugo Montalvão
RELATÓRIO FINAL: PROJETO DESAFIO CONTROLE DE POSIÇÃO DE UMA VÁLVULA Laboratório de Controle e Automação 1 ( LECI 1 ) Professor: Reinaldo Martinez Palhares Integrantes: Henrique Goseling Araújo, Hugo Montalvão
Aula 05 Diagramas de blocos & erro
 Aula 05 Diagrama de bloco & erro input output Bloco imple Caixa preta Black box Caixa preta ou Black box: G() input output Função de Tranferência: ou: G () Y() X() Y() G() X() ou eja, SAÍDA F.T. X ENTRADA
Aula 05 Diagrama de bloco & erro input output Bloco imple Caixa preta Black box Caixa preta ou Black box: G() input output Função de Tranferência: ou: G () Y() X() Y() G() X() ou eja, SAÍDA F.T. X ENTRADA
Função de Transferência de Malha Fechada
 Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Universidade Federal de Juiz de Fora Faculdade de Engenharia Departamento de Energia Elétrica PLANO DE ENSINO
 Universidade Federal de Juiz de Fora Faculdade de Engenharia Departamento de Energia Elétrica 1) IDENTIFICAÇÃO DA DISCIPLINA Disciplina Teoria de Controle II PLANO DE ENSINO Código CEL039 Carga horária
Universidade Federal de Juiz de Fora Faculdade de Engenharia Departamento de Energia Elétrica 1) IDENTIFICAÇÃO DA DISCIPLINA Disciplina Teoria de Controle II PLANO DE ENSINO Código CEL039 Carga horária
Transformada de Laplace. Definição. O processo inverso de obter a função temporal f(t) a partir da
 a partir da") Prof. Raimundo Nonato das Mercês Machado O processo inverso de obter a função temporal f(t) a partir da transformada de Laplace F(s) é chamado transformada de Laplace inversa. A notação para a transformada
Prof. Raimundo Nonato das Mercês Machado O processo inverso de obter a função temporal f(t) a partir da transformada de Laplace F(s) é chamado transformada de Laplace inversa. A notação para a transformada
AULA 3. CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com Atraso.
 Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com
3. REPRESENTAÇÃO DE SISTEMAS
 3. REPRESENTAÇÃO DE SISTEMAS A abordagem à teoria dos sistemas, seguida até agora, partiu de alguns exemplos de sistemas físicos, determinou descrições das suas dinâmicas em termos de equações diferenciais
3. REPRESENTAÇÃO DE SISTEMAS A abordagem à teoria dos sistemas, seguida até agora, partiu de alguns exemplos de sistemas físicos, determinou descrições das suas dinâmicas em termos de equações diferenciais
MÓDULO DIDÁTICO PARA ENSINO DE TEORIA DE ESPAÇO DE ESTADOS APLICADA A SISTEMAS DE CONTROLE
 Congresso Técnico Científico da Engenharia e da Agronomia CONTECC 218 Maceió - AL 21 a 24 de agosto de 218 MÓDULO DIDÁTICO PARA ENSINO DE TEORIA DE ESPAÇO DE ESTADOS APLICADA A SISTEMAS DE CONTROLE RAFAEL
Congresso Técnico Científico da Engenharia e da Agronomia CONTECC 218 Maceió - AL 21 a 24 de agosto de 218 MÓDULO DIDÁTICO PARA ENSINO DE TEORIA DE ESPAÇO DE ESTADOS APLICADA A SISTEMAS DE CONTROLE RAFAEL

VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
AULA #12. Estabilidade de Sistemas de Controle por
 AULA #12 Estabilidade de Sistemas de Controle por Realimentação Estabilidade de Sistemas de Controle por Realimentação A presença de medidores, controladores e elementos finais de controle afetam as características
AULA #12 Estabilidade de Sistemas de Controle por Realimentação Estabilidade de Sistemas de Controle por Realimentação A presença de medidores, controladores e elementos finais de controle afetam as características
Engenharia de Controle
 Engenharia de Controle Prof. Fernando de Oliveira Souza Contato: Sala 2523 (BLOCO 1) e-mail: fosouza@cpdee.ufmg.br www.cpdee.ufmg.br/ fosouza Terças-feiras (20h55 às 22h35) e Sextas-feiras (19h00 às 20h40)
Engenharia de Controle Prof. Fernando de Oliveira Souza Contato: Sala 2523 (BLOCO 1) e-mail: fosouza@cpdee.ufmg.br www.cpdee.ufmg.br/ fosouza Terças-feiras (20h55 às 22h35) e Sextas-feiras (19h00 às 20h40)

Aula 3. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
AULA 8 COMPENSAÇÃO POR ATRASO DE FASE. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I PROF. DR. ALFREDO DEL SOLE LORDELO
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 8 COMPENSAÇÃO POR ATRASO DE FASE PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA A configuração do compensador eletrônico por atraso
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 8 COMPENSAÇÃO POR ATRASO DE FASE PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA A configuração do compensador eletrônico por atraso
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular ENGENHARIA DE SOFTWARE Ano Lectivo 2010/2011
 Programa da Unidade Curricular ENGENHARIA DE SOFTWARE Ano Lectivo 2010/2011 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Informática 3. Ciclo de Estudos 1º 4. Unidade Curricular
Programa da Unidade Curricular ENGENHARIA DE SOFTWARE Ano Lectivo 2010/2011 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Informática 3. Ciclo de Estudos 1º 4. Unidade Curricular
Licenciatura de EI 2010/2011. msantos@ispgaya.pt. Mário Santos / Carlos Ramos
 5º semestre Licenciatura de EI 2010/2011 msantos@ispgaya.pt cramos@ispgaya.ptpt / Carlos Ramos 1 Objectivos da Disciplina de Sistemas de Informação da Licenciatura de EI Complementar a formação em bases
5º semestre Licenciatura de EI 2010/2011 msantos@ispgaya.pt cramos@ispgaya.ptpt / Carlos Ramos 1 Objectivos da Disciplina de Sistemas de Informação da Licenciatura de EI Complementar a formação em bases
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA. Plano de Ensino
 DISCIPLINA: Teoria Eletromagnética. CÓDIGO: MEE007 Validade: Carga Horária: 45 horas-aula Créditos: 03 Área de Concentração / Módulo: Sistemas Elétricos / Formação Básica Ementa: Análise Vetorial. Equações
DISCIPLINA: Teoria Eletromagnética. CÓDIGO: MEE007 Validade: Carga Horária: 45 horas-aula Créditos: 03 Área de Concentração / Módulo: Sistemas Elétricos / Formação Básica Ementa: Análise Vetorial. Equações
Guião do Trabalho Laboratorial Nº 3 Análise do Comportamento de uma Suspensão de Automóvel
 SISEL Sistemas Electromecânicos Guião do Trabalho Laboratorial Nº 3 Análise do Comportamento de uma Suspensão de Automóvel GRIS Group of Robotics and Intelligent Systems Homepage: http://www.dee.isep.ipp.pt/~gris
SISEL Sistemas Electromecânicos Guião do Trabalho Laboratorial Nº 3 Análise do Comportamento de uma Suspensão de Automóvel GRIS Group of Robotics and Intelligent Systems Homepage: http://www.dee.isep.ipp.pt/~gris
DESCRIÇÃO MATEMÁTICA DE SISTEMAS PARTE 1
 DESRIÇÃO MATEMÁTIA DE SISTEMAS PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Agenda Modelagem de sistemas dinâmicos Descrição Entrada-Saída
DESRIÇÃO MATEMÁTIA DE SISTEMAS PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Agenda Modelagem de sistemas dinâmicos Descrição Entrada-Saída
REPÚBLICA FEDERATIVA DO BRASIL ESTADO DE SANTA CATARINA Universidade do Estado de Santa Catarina - UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS - UDESC/CCT
 Curso: ELE-ELE - Bacharelado em Engenharia Elétrica Departamento: DEE - Engenharia Elétrica Disciplina: null Código: CA2COD1 Carga horária: 90 Período letivo: 2018/1 Professor: José de Oliveira Contato:
Curso: ELE-ELE - Bacharelado em Engenharia Elétrica Departamento: DEE - Engenharia Elétrica Disciplina: null Código: CA2COD1 Carga horária: 90 Período letivo: 2018/1 Professor: José de Oliveira Contato:
Exemplo 1. 1- Qual a eficiência de um transformador
 Exemplo 1 1- Qual a eficiência de um transformador elétrico que no processo de redução de tensão de 11.000 volts para 110 volts recebe energia de 850KWh e envia 830KWh? Exemplo 1 SOLUÇÃO: 850KWh 830KWh
Exemplo 1 1- Qual a eficiência de um transformador elétrico que no processo de redução de tensão de 11.000 volts para 110 volts recebe energia de 850KWh e envia 830KWh? Exemplo 1 SOLUÇÃO: 850KWh 830KWh
OBJETO DE APRENDIZAGEM EM SISTEMAS LINEARES
 OBJETO DE APRENDIZAGEM EM SISTEMAS LINEARES Raul Matheus Martins raulgildons@gmail.com Universidade Tecnológica Federal do Paraná UTFPR Curso de Engenharia de Automação Av. Sete de Setembro, 3165 80230-901
OBJETO DE APRENDIZAGEM EM SISTEMAS LINEARES Raul Matheus Martins raulgildons@gmail.com Universidade Tecnológica Federal do Paraná UTFPR Curso de Engenharia de Automação Av. Sete de Setembro, 3165 80230-901
Programação orientada a objetos usando a linguagem C++ CDTN Centro de Desenvolvimento de Tecnologia Nuclear
 Programação orientada a objetos usando a linguagem C++ CDTN Centro de Desenvolvimento de Tecnologia Nuclear Belo Horizonte, Setembro de 2000 1- Objetivo: Ministrar o curso de Treinamento em Programação
Programação orientada a objetos usando a linguagem C++ CDTN Centro de Desenvolvimento de Tecnologia Nuclear Belo Horizonte, Setembro de 2000 1- Objetivo: Ministrar o curso de Treinamento em Programação
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA. Plano de Ensino
 DISCIPLINA: Sinais e Sistemas CÓDIGO: MEE003 Validade: A partir do 1º semestre de 2009. Carga Horária: 5 horas-aula Créditos: 03 Área de Concentração / Módulo: Modelagem e Controle de Sistemas / Disciplinas
DISCIPLINA: Sinais e Sistemas CÓDIGO: MEE003 Validade: A partir do 1º semestre de 2009. Carga Horária: 5 horas-aula Créditos: 03 Área de Concentração / Módulo: Modelagem e Controle de Sistemas / Disciplinas
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Representação e Análise de Sistemas Dinâmicos Lineares
 Representação e Análise de Sistemas Dinâmicos Lineares 1. Funções de transferência de sistemas lineares 2. Diagramas de blocos 3. ráfico de fluxo de sinais 4. Modelagem matemática de sistemas físicos pag.1
Representação e Análise de Sistemas Dinâmicos Lineares 1. Funções de transferência de sistemas lineares 2. Diagramas de blocos 3. ráfico de fluxo de sinais 4. Modelagem matemática de sistemas físicos pag.1
Disciplina: Introdução à Arquitetura de Computadores
 Disciplina: Introdução à Arquitetura de Computadores Unipampa Federal do Pampa - Campus Bagé June 27, 2013 1 2 Informações básicas (EC11). Curso: Engenharia de Computação. Informações básicas (EC11). Curso:
Disciplina: Introdução à Arquitetura de Computadores Unipampa Federal do Pampa - Campus Bagé June 27, 2013 1 2 Informações básicas (EC11). Curso: Engenharia de Computação. Informações básicas (EC11). Curso:
Guião do Trabalho Laboratorial Nº 1 Introdução ao MATLAB v7.1. GRIS Group of Robotics and Intelligent Systems
 SISEL Sistemas Electromecânicos Guião do Trabalho Laboratorial Nº 1 Introdução ao MATLAB v7.1 Análise de um Servomecanismo de Posição GRIS Group of Robotics and Intelligent Systems Homepage: http://www.dee.isep.ipp.pt/~gris
SISEL Sistemas Electromecânicos Guião do Trabalho Laboratorial Nº 1 Introdução ao MATLAB v7.1 Análise de um Servomecanismo de Posição GRIS Group of Robotics and Intelligent Systems Homepage: http://www.dee.isep.ipp.pt/~gris
Matemática para Engenharia
 Matemática para Engenharia Profa. Grace S. Deaecto Faculdade de Engenharia Mecânica / UNICAMP 13083-860, Campinas, SP, Brasil. grace@fem.unicamp.br Segundo Semestre de 2013 Profa. Grace S. Deaecto ES401
Matemática para Engenharia Profa. Grace S. Deaecto Faculdade de Engenharia Mecânica / UNICAMP 13083-860, Campinas, SP, Brasil. grace@fem.unicamp.br Segundo Semestre de 2013 Profa. Grace S. Deaecto ES401
Erro em regime permanente em sistema de controle com
 Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
GUIA DE FUNCIONAMENTO DA UNIDADE CURRICULAR
 Curso Engenharia Informática Ano letivo 2012/13 Unidade Curricular Redes de Computadores ECTS 5 Regime Obrigatório Ano 2º Semestre 2º sem Horas de trabalho globais Docente (s) Sérgio Duarte Total 140 Contacto
Curso Engenharia Informática Ano letivo 2012/13 Unidade Curricular Redes de Computadores ECTS 5 Regime Obrigatório Ano 2º Semestre 2º sem Horas de trabalho globais Docente (s) Sérgio Duarte Total 140 Contacto
2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- G 4 (s) = G 2 5 (s) = (s+5) G 6 (s) =
 = G 2 5 (s) = (s+5) G 6 (s) =") ENG04035 - Sistemas de Controle I Prof. João Manoel e Prof. Romeu LISTA DE EXERCÍCIOS 2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- 1. Considere os seguintes processos: 5 1 G 1 (s) = (s2)(s10)
ENG04035 - Sistemas de Controle I Prof. João Manoel e Prof. Romeu LISTA DE EXERCÍCIOS 2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- 1. Considere os seguintes processos: 5 1 G 1 (s) = (s2)(s10)
Aula 04 Representação de Sistemas
 Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Sistemas de Informação
 5º semestre Licenciatura de EI 2011/2012 msantos@ispgaya.pt cramos@ispgaya.pt / Carlos Ramos 1 Objectivos da Disciplina de Sistemas de Informação da Licenciatura de EI Complementar a formação em bases
5º semestre Licenciatura de EI 2011/2012 msantos@ispgaya.pt cramos@ispgaya.pt / Carlos Ramos 1 Objectivos da Disciplina de Sistemas de Informação da Licenciatura de EI Complementar a formação em bases
CLAUDIO EDUARDO SOARES
 UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENGENHARIA ELÉTRICA DEE MESTRADO PROFISSIONAL EM ENGENHARIA ELÉTRICA CLAUDIO EDUARDO SOARES CONTROLADORES
UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENGENHARIA ELÉTRICA DEE MESTRADO PROFISSIONAL EM ENGENHARIA ELÉTRICA CLAUDIO EDUARDO SOARES CONTROLADORES
CA2COD1: COD CONTROLE DIGITAL. Profa. Mariana Cavalca
 CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
Desempenho de Sistemas de Controle Realimentados. 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Métodos de Resposta em Freqüência
 Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
SEM 538 Sistemas de Controle II
 SEM 538 Sistemas de Controle II - 07 Prof.: Adriano Almeida Gonçalves Siqueira Descrição: Sistemas discretos no tempo, equações a diferenças. Transformada Z e transformações de sistemas contínuos para
SEM 538 Sistemas de Controle II - 07 Prof.: Adriano Almeida Gonçalves Siqueira Descrição: Sistemas discretos no tempo, equações a diferenças. Transformada Z e transformações de sistemas contínuos para
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
CDI: CONTROLE DIGITAL. Profa. Mariana Cavalca
 CDI: CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior: microcontroladores.
CDI: CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior: microcontroladores.
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA
 OGATA") RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular ENGENHARIA DE SOFTWARE Ano Lectivo 2014/2015
 Programa da Unidade Curricular ENGENHARIA DE SOFTWARE Ano Lectivo 2014/2015 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Informática 3. Ciclo de Estudos 1º 4. Unidade Curricular
Programa da Unidade Curricular ENGENHARIA DE SOFTWARE Ano Lectivo 2014/2015 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Informática 3. Ciclo de Estudos 1º 4. Unidade Curricular
LABORATÓRIO DE CONTROLE I ESTUDO DE COMPENSADORES DE FASE
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 4: ESTUDO DE COMPENSADORES DE FASE COLEGIADO DE ENGENHARIA ELÉTRICA DISCENTES: Lucas
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 4: ESTUDO DE COMPENSADORES DE FASE COLEGIADO DE ENGENHARIA ELÉTRICA DISCENTES: Lucas
Análise de Circuitos Elétricos III
 Análise de Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais Introdução à Transformada de Laplace A Transformada
Análise de Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais Introdução à Transformada de Laplace A Transformada