Aula 06 Análise no domínio do tempo Parte I Sistemas de 1ª ordem
|
|
|
- Pedro Gesser Medina
- 8 Há anos
- Visualizações:
Transcrição
1 Aula 06 Análise n dmíni d temp Parte I Sistemas de 1ª rdem

2 input S utput Sistemas de primeira rdem Sistema de primeira rdem d tip a G(s) bs + c

3 input a bs + c utput Sistemas de primeira rdem u seja: Y(s) R (s) a bs + c Y(s) R (s) a c (bs + c c) b c a c s + 1, T
 b c a c s + 1, T")
4 input a bs Ts + c1 utput Sistemas de primeira rdem u seja: a funçã de transferência pde ser reescrita cm: Y(s) R(s) Ts + 1
")
5 input Ts + 1 utput Sistemas de primeira rdem ganh d sistema T cnstante de temp d sistema a funçã de transferência: Y(s) R(s) Ts + 1
")
6 Exempl 1: Y(s) R(s) 5s 2/4 0,5 T 5/4 1, pl: s 0,8 Exempl 2: Y(s) R(s) 12 s + 4 pl: s 4 3 T ¼ 0,25

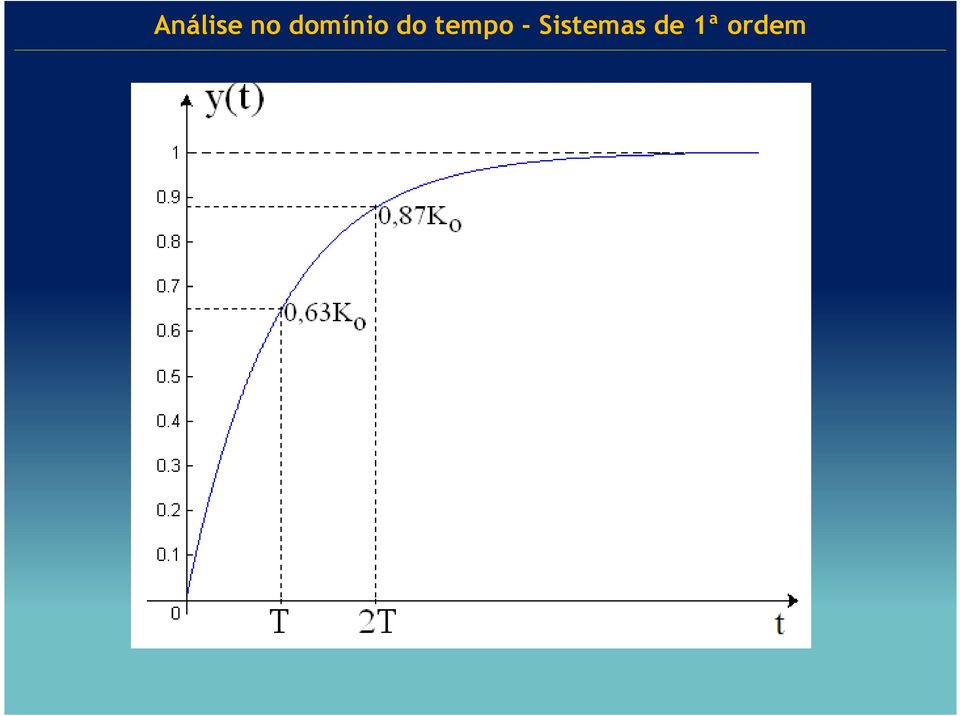
7 input Ts + 1 utput Sistemas de primeira rdem r(t) Entrada degrau unitári Qual é a respsta a degrau? (step respnse)

8 input para calcular fazems: Ts + 1 Y(s) R(s) Ts + 1 utput Sistemas de primeira rdem Y(s) (Ts + 1) 1 s s T (Ts + 1)
 (Ts + 1) 1 s s T")
9 input Ts + 1 utput Sistemas de primeira rdem y(t) L 1 [ Y(s) ] lg, a respsta a degrau unitári é: y(t) t / T (1 e ), t > 0
![] lg, a respsta a degrau](/docs-images/44/4918191/images/page_9.jpg "unitári é: y(t) t / T (1 e ),")
10 input Ts + 1 utput Sistemas de primeira rdem r(t) a respsta a degrau unitári é: t / T y(t) (1 e ), t > 0 entrada degrau unitári
, t > 0 entrada degrau")
11 a respsta a degrau unitári é: y(t) t / T (1 e ), t > 0
 t / T (1")
12 Observe que, para a respsta a degrau unitári: y(t) t / T (1 e ), t > 0 Se t T y(t) 1 (1 e ) 0,632 Se t 2T y(2t) 2 (1 e ) 0,865 Se t 3T y(3t) 3 (1 e ) 0,95 Se t 4T y(4t) 4 (1 e ) 0,982 Se t 5T y(5t) 5 (1 e ) 0,993
 4 (1 e ) 0,982 Se t 5T y(5t) 5 (1 e )")
13

14
15

16

17

18 input Ts + 1 utput Sistemas de primeira rdem r(t) Entrada impuls unitári Qual é a respsta a impuls? (impulse respnse)

19 Ts + 1 input para calcular fazems: Y(s) R(s) Ts + 1 utput Sistemas de primeira rdem Y(s) (Ts + 1) 1 (Ts + 1)
 (Ts + 1) 1 (Ts +")
20 Ts + 1 input utput Sistemas de primeira rdem y(t) L 1 [ Y(s) ] lg, a respsta a impuls unitári é: y(t) e t / T, t > T 0
![Y(s) ] lg, a respsta a impuls](/docs-images/44/4918191/images/page_20.jpg "unitári é: y(t) e t / T, t >")
21 Ts + 1 input utput Sistemas de primeira rdem r(t) a respsta a impuls unitári é: t / T y(t) e, t > T 0 Entrada impuls unitári
22 a respsta a impuls unitári é: y(t) e t / T, t > T 0
23 Observe que, para a respsta a impuls: y(t) t / T e, t > T 0 Se t T y(t) e 1 0,368 ( / T) Se t 2T y(2t) e 2 0,135 ( / T) Se t 3T y(3t) e 3 0,05 ( / T) Se t 4T y(4t) e 4 0,02 ( / T) Se t 5T y(5t) e 5 0,007 ( / T)
24
25
26
27
28
29 Ts + 1 input utput Sistemas de primeira rdem r(t) Entrada rampa unitária Qual é a respsta à rampa? (ramp respnse)
30 Ts + 1 input para calcular fazems: utput Y(s) R(s) Ts + 1 Sistemas de primeira rdem Y(s) (Ts + 1) 1 s 2 s 2 T s + (Ts 2 T + 1)
31 Ts + 1 input utput Sistemas de primeira rdem y(t) L 1 [ Y(s) ] lg, a respsta à rampa unitária é: y(t) t / T (t T + T e ), t > 0
32 Ts + 1 input utput Sistemas de primeira rdem Se 1, a respsta à rampa unitária é: y(t) t T + T e t / T, t > 0
33 Ts + 1 input utput Sistemas de primeira rdem r(t) respsta à rampa unitária para 1: y(t) t T + T e t / T, t > 0 Entrada rampa unitária
34 fr the unit ramp input, the utput is: t T + T e t / T, t > 0 1
35 fr the unit ramp input, the utput is: t T + T e t / T, t > 0 1
36
37 Err p/ entrada rampa unitária
38 Ts + 1 input utput Sistemas de primeira rdem Err para entrada rampa unitária, 1: E(s) 1 s 2 1 Ts s 2 1 s Ts s 2 ( Ts + 1 1) Ts s 2 Ts Ts + 1
39 Ts + 1 input Err em estad estacinári: utput Sistemas de primeira rdem e ss lim s 0 s E(s) lim s 0 s 1 s 2 Ts Ts + 1 lim s 0 T Ts + 1 T e ss T
40 Err p/ entrada rampa unitária
41 Obrigad! Felippe de Suza
Controle I. Análise de resposta transitória Sistemas de primeira ordem
 Controle I Análise de resposta transitória Sistemas de primeira ordem input S output Sistemas de primeira ordem Sistema de primeira ordem do tipo G (s) a bs c input a bs c output Sistemas de primeira
Controle I Análise de resposta transitória Sistemas de primeira ordem input S output Sistemas de primeira ordem Sistema de primeira ordem do tipo G (s) a bs c input a bs c output Sistemas de primeira
Análise de Erro Estacionário
 Análise de Erro Estacionário Sistema de controle pode apresentar erro estacionário devido a certos tipos de entrada. Um sistema pode não apresentar erro estacionário a uma determinada entrada, mas apresentar
Análise de Erro Estacionário Sistema de controle pode apresentar erro estacionário devido a certos tipos de entrada. Um sistema pode não apresentar erro estacionário a uma determinada entrada, mas apresentar
Aula 07 Análise no domínio do tempo Parte II Sistemas de 2ª ordem
 Aula 07 Aálise o domíio do tempo Parte II Sistemas de ª ordem Aálise o domíio do tempo - Sistemas de ª ordem iput S output Sistema de seguda ordem do tipo α G(s) as + bs + c Aálise o domíio do tempo -
Aula 07 Aálise o domíio do tempo Parte II Sistemas de ª ordem Aálise o domíio do tempo - Sistemas de ª ordem iput S output Sistema de seguda ordem do tipo α G(s) as + bs + c Aálise o domíio do tempo -
Desempenho de Sistemas de Controle Realimentados
 Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
Erro em regime permanente em sistema de controle com
 Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
5 Transformadas de Laplace
 5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
Aula 8. Cristiano Quevedo Andrea 1. Curitiba, Abril de DAELT - Departamento Acadêmico de Eletrotécnica
 Classificaçã dos Sistemas de Controle Especificaçõe do Estado Estacionário de Erro Aula 8 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico
Classificaçã dos Sistemas de Controle Especificaçõe do Estado Estacionário de Erro Aula 8 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico
Desempenho de Sistemas de Controle Realimentados
 Desempenho de Sistemas de Controle Realimentados 1. Exemplo de projeto: controle de posicionamento do telescópio Hubble 2. Usando MATLAB c 3. Exemplo de projeto seqüêncial: sistema de leitura de um acionador
Desempenho de Sistemas de Controle Realimentados 1. Exemplo de projeto: controle de posicionamento do telescópio Hubble 2. Usando MATLAB c 3. Exemplo de projeto seqüêncial: sistema de leitura de um acionador
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Aula 05 Diagramas de blocos & erro
 Aula 05 Diagrama de bloco & erro input output Bloco imple Caixa preta Black box Caixa preta ou Black box: G() input output Função de Tranferência: ou: G () Y() X() Y() G() X() ou eja, SAÍDA F.T. X ENTRADA
Aula 05 Diagrama de bloco & erro input output Bloco imple Caixa preta Black box Caixa preta ou Black box: G() input output Função de Tranferência: ou: G () Y() X() Y() G() X() ou eja, SAÍDA F.T. X ENTRADA
Controlador PID: algoritmo, estrutura e sintonia
 Controlador PID: algoritmo, estrutura e sintonia Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 05 de setembro de 2018. Sumário 1 Introdução
Controlador PID: algoritmo, estrutura e sintonia Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 05 de setembro de 2018. Sumário 1 Introdução
Aula 03 Modelização de Sistemas
 Aula 03 Mdelizaçã de Sistemas Mdelizaçã de Sistemas entrada (input) saída (utput) carr / massa / mla Mdelizaçã de Sistemas carr / massa / mla Mdelizaçã de Sistemas carr / massa / mla frça aplicada deslcament
Aula 03 Mdelizaçã de Sistemas Mdelizaçã de Sistemas entrada (input) saída (utput) carr / massa / mla Mdelizaçã de Sistemas carr / massa / mla Mdelizaçã de Sistemas carr / massa / mla frça aplicada deslcament
SISTEMAS DE CONTROLE II
 SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
5 Descrição entrada-saída
 Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Capítulo 3 Sistemas de Controle com Realimentação
 Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Aula 8. Transformadas de Fourier
 Aula 8 Jean Baptiste Jseph Furier (francês, 768-830) extracts ds riginais de Furier Enquant que as Séries de Furier eram definidas apenas para sinais periódics, as sã definidas para uma classe de sinais
Aula 8 Jean Baptiste Jseph Furier (francês, 768-830) extracts ds riginais de Furier Enquant que as Séries de Furier eram definidas apenas para sinais periódics, as sã definidas para uma classe de sinais
V. ANÁLISE NO DOMÍNIO DO TEMPO
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- G 4 (s) = G 2 5 (s) = (s+5) G 6 (s) =
 = G 2 5 (s) = (s+5) G 6 (s) =") ENG04035 - Sistemas de Controle I Prof. João Manoel e Prof. Romeu LISTA DE EXERCÍCIOS 2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- 1. Considere os seguintes processos: 5 1 G 1 (s) = (s2)(s10)
ENG04035 - Sistemas de Controle I Prof. João Manoel e Prof. Romeu LISTA DE EXERCÍCIOS 2.1 - Análise de Sistemas Realimentado pelo Lugar das Raízes- 1. Considere os seguintes processos: 5 1 G 1 (s) = (s2)(s10)
COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com Atraso.
 Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com
Aula 04 Representação de Sistemas
 Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Transformadas de Laplace Engenharia Mecânica - FAENG. Prof. Josemar dos Santos
 Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
Aula 3. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle
 Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle Hector Bessa Silveira e Daniel Coutinho 2012/2 1 Objetivos Neste próximos laboratórios, utilizar-se-á
Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle Hector Bessa Silveira e Daniel Coutinho 2012/2 1 Objetivos Neste próximos laboratórios, utilizar-se-á
Transformada de Laplace
 UNIVERSIDADE FEDERAL DA PARAÍBA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA Transfrmada de Laplace Prf. Juan Mises Maurici Villanueva jmaurici@cear.ufpb.br www.cear.ufpb.br/juan Transfrmada de Lapace
UNIVERSIDADE FEDERAL DA PARAÍBA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA Transfrmada de Laplace Prf. Juan Mises Maurici Villanueva jmaurici@cear.ufpb.br www.cear.ufpb.br/juan Transfrmada de Lapace
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
PID e Lugar das Raízes
 PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
Aula 9. Diagrama de Bode
 Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Desempenho de Sistemas de Controle Realimentados. 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Fundamentos de Controle
 Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
x(t) = e X(jω) = 2 π u o (ω ω o )
 = e X(jω) = 2 π u o (ω ω o )") J. A. M. Felippe de Suza Análi de Sinais - Hmewrk 08 Análi de Sinais Hmewrk 09 (Transfrmadas de Furier) ) Mstre que s sinais x(t) abaix têm as transfrmadas de Furier X(j) crrespndentes, que também sã dada
J. A. M. Felippe de Suza Análi de Sinais - Hmewrk 08 Análi de Sinais Hmewrk 09 (Transfrmadas de Furier) ) Mstre que s sinais x(t) abaix têm as transfrmadas de Furier X(j) crrespndentes, que também sã dada
Controle de Sistemas. Desempenho de Sistemas de Controle. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas O é um telescópio de 2,4m, que fica a 380 milhas da Terra, sendo
Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas O é um telescópio de 2,4m, que fica a 380 milhas da Terra, sendo
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE VI. MÉTODO DO LUGAR GEOMÉTRICO DAS RAÍZES Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
PMR3404 Controle I Aula 3
 PMR3404 Controle I Aula 3 Resposta estática Ações de controle PID Newton Maruyama 23 de março de 2017 PMR-EPUSP Classificação de sistemas de acordo com o seu desempenho em regime estático Seja o seguinte
PMR3404 Controle I Aula 3 Resposta estática Ações de controle PID Newton Maruyama 23 de março de 2017 PMR-EPUSP Classificação de sistemas de acordo com o seu desempenho em regime estático Seja o seguinte
Unidade V - Desempenho de Sistemas de Controle com Retroação
 Unidade V - Desempenho de Sistemas de Controle com Retroação Introdução; Sinais de entrada para Teste; Desempenho de um Sistemas de Segunda Ordem; Efeitos de um Terceiro Pólo e de um Zero na Resposta Sistemas
Unidade V - Desempenho de Sistemas de Controle com Retroação Introdução; Sinais de entrada para Teste; Desempenho de um Sistemas de Segunda Ordem; Efeitos de um Terceiro Pólo e de um Zero na Resposta Sistemas
Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
ANÁLISE LINEAR DE SISTEMAS
 ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
Função de Transferência de Malha Fechada
 Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Introdução aos Circuitos Elétricos
 Introdução aos Circuitos Elétricos A Transformada de Laplace Prof. Roberto Alves Braga Jr. Prof. Bruno Henrique Groenner Barbosa UFLA - Departamento de Engenharia A Transformada de Laplace História Pierri
Introdução aos Circuitos Elétricos A Transformada de Laplace Prof. Roberto Alves Braga Jr. Prof. Bruno Henrique Groenner Barbosa UFLA - Departamento de Engenharia A Transformada de Laplace História Pierri
Controle de Sistemas. Desempenho de Sistemas de Controle. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Cotrole de Sistemas Desempeho de Sistemas de Cotrole Reato Dourado Maia Uiversidade Estadual de Motes Claros Egeharia de Sistemas Aálise da Resposta Temporal A resposta temporal de um sistema de cotrole
Cotrole de Sistemas Desempeho de Sistemas de Cotrole Reato Dourado Maia Uiversidade Estadual de Motes Claros Egeharia de Sistemas Aálise da Resposta Temporal A resposta temporal de um sistema de cotrole
Controle de Processos Aula: Estabilidade e Critério de Routh
 107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
Sistemas a Tempo Discreto
 Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
1. Sinais de teste. 2. Sistemas de primeira ordem. 3. Sistemas de segunda ordem. Especificações para a resposta
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
Sistemas a Tempo Discreto - Projeto
 Sistemas a Tempo Discreto - Projeto 1. Especificações de Projeto no domínio discreto 2. Projeto via Emulação 2.1 Controladores Equivalentes Discretos 2.2 Mapeamento pólo-zero 2.3 Avaliação do projeto pag.1
Sistemas a Tempo Discreto - Projeto 1. Especificações de Projeto no domínio discreto 2. Projeto via Emulação 2.1 Controladores Equivalentes Discretos 2.2 Mapeamento pólo-zero 2.3 Avaliação do projeto pag.1
Transformada z. ADL 25 Cap 13. A Transformada z Inversa
 ADL 25 Cap 13 Transformada z A Transformada z Inversa Qualquer que seja o método utilizado a transformada z inversa produzirá somente os valores da função do tempo nos instantes de amostragem. Portanto,
ADL 25 Cap 13 Transformada z A Transformada z Inversa Qualquer que seja o método utilizado a transformada z inversa produzirá somente os valores da função do tempo nos instantes de amostragem. Portanto,
Ações de controle básicas: uma análise do desempenho em regime
 Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Universidade Federal do Pará Instituto de Tecnologia. Cálculo III. Campus de Belém Curso de Engenharia Mecânica
 Universidade Federal do Pará Instituto de Tecnologia Cálculo III Prof. Dr. Jorge Teófilo de Barros Lopes Campus de Belém Curso de Engenharia Mecânica Universidade Federal do Pará Instituto de Tecnologia
Universidade Federal do Pará Instituto de Tecnologia Cálculo III Prof. Dr. Jorge Teófilo de Barros Lopes Campus de Belém Curso de Engenharia Mecânica Universidade Federal do Pará Instituto de Tecnologia
Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
Departamento de Engenharia Elétrica Prova individual, sem consulta. Só é permitido o uso de calculadora científica básica.
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
Objetivos de Controle
 Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Aula 10 Resposta em Freqüência de Sistemas Lineares Diagramas de Bode Introdução
 Aula 0 Respsta em Freqüência de Sistemas Lineares Diagramas de Bde Intrduçã Diagramas de Bde Escala Lgarítmica de Amplitude Escala Lgarítmica de Freqüência Análise ds Terms das Funções de Transferência
Aula 0 Respsta em Freqüência de Sistemas Lineares Diagramas de Bde Intrduçã Diagramas de Bde Escala Lgarítmica de Amplitude Escala Lgarítmica de Freqüência Análise ds Terms das Funções de Transferência
Sinais e Sistemas Mecatrónicos
 Sinais e Sistemas Mecatrónicos Modelação de Sistemas Físicos Formulação do Modelo Diagrama de Blocos José Sá da Costa José Sá da Costa T5 - Modelação de Sistemas Físicos (cont.) 1 Interligação de Elementos
Sinais e Sistemas Mecatrónicos Modelação de Sistemas Físicos Formulação do Modelo Diagrama de Blocos José Sá da Costa José Sá da Costa T5 - Modelação de Sistemas Físicos (cont.) 1 Interligação de Elementos
Sistemas de Controle
 Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 2 - Transformada de Laplace e Função Transferência Sistemas de Controle p. 1/27 Função Impulso Unitário Função pulso com área unitária: f(t)
Aula 03 Sinais singulares
 Ala 03 Sinais singlares Intrdçã as Sinais Singlares Os sinais singlares, também chamads sinais de excitaçã frmam ma família [n], 1 [n], 2 [n],..., n cas discret;, (t), 1 (t), 2 (t),..., n cas cntín; Eles
Ala 03 Sinais singlares Intrdçã as Sinais Singlares Os sinais singlares, também chamads sinais de excitaçã frmam ma família [n], 1 [n], 2 [n],..., n cas discret;, (t), 1 (t), 2 (t),..., n cas cntín; Eles
PROJETO DE CONTROLADORES A PARTIR DO PLANO S. critério Routh-Hurwitz análise de estabilidade análise de desempenho
 PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
2.17 Matlab em Sistemas de Controle
 46 CAPÍTULO 2. INTRODUÇÃO AO MATLAB 2.17 Matlab em Sistemas de Controle Nesta seção, os comandos básicos do CONTROL SYSTEM Toolbox do MATLAB são introduzidos. O comando helpcontrol fornece uma lista das
46 CAPÍTULO 2. INTRODUÇÃO AO MATLAB 2.17 Matlab em Sistemas de Controle Nesta seção, os comandos básicos do CONTROL SYSTEM Toolbox do MATLAB são introduzidos. O comando helpcontrol fornece uma lista das
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Controle de Sistemas I
 Controle de Sistemas I Sinais e Sistemas - Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário
Controle de Sistemas I Sinais e Sistemas - Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
UNIVERSIDADE DO ALGARVE
 UNIVERSIDADE DO ALGARVE FACULDADE DE CIÊNCIAS E TECNOLOGIA Departamento de Engenharia Electrónica e Informática SISTEMAS DE CONTROLO Problemas Ano lectivo de 20062007 Licenciatura em Engenharia de Sistemas
UNIVERSIDADE DO ALGARVE FACULDADE DE CIÊNCIAS E TECNOLOGIA Departamento de Engenharia Electrónica e Informática SISTEMAS DE CONTROLO Problemas Ano lectivo de 20062007 Licenciatura em Engenharia de Sistemas
Aula 09 Equações de Estado (parte II)
") Aul 9 Equções de Estdo (prte II) Recpitulndo (d prte I): s equções de estdo têm form (sistems de ordem n ) = A + B u y = C + D u onde: A é um mtriz n n B é um mtriz n p C é um mtriz q n D é um mtriz q
Aul 9 Equções de Estdo (prte II) Recpitulndo (d prte I): s equções de estdo têm form (sistems de ordem n ) = A + B u y = C + D u onde: A é um mtriz n n B é um mtriz n p C é um mtriz q n D é um mtriz q
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Indice. Resposta forçada (condições iniciais nulas)
") Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Controle e Sistemas Não lineares
 Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Controle de Processos Aula: Sistema em malha fechada
 107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2017 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2017 E. S. Tognetti (UnB) Controle
J. A. M. Felippe de Souza 3 Sinais Singulares. 3 Sinais Singulares
 J. A. M. Felippe de Sza 3 Sinais Singlares 3 Sinais Singlares 3. Intrdçã as sinais singlares 3 3. Sinais singlares discrets 4 O sinal impls nitári discret ( nit-implse ) 4 Prpriedades d impls nitári discret
J. A. M. Felippe de Sza 3 Sinais Singlares 3 Sinais Singlares 3. Intrdçã as sinais singlares 3 3. Sinais singlares discrets 4 O sinal impls nitári discret ( nit-implse ) 4 Prpriedades d impls nitári discret
Controle de Processos Aula: Sistema em malha fechada
 107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
SC1 Sistemas de Controle 1. Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
Aula 13 Análise no domínio da frequência
 Aula 13 Análise no domínio da frequência A resposta em frequência é a resposta do sistema em estado estacionário (ou em regime permanente) quando a entrada do sistema é sinusoidal. Métodos de análise de
Aula 13 Análise no domínio da frequência A resposta em frequência é a resposta do sistema em estado estacionário (ou em regime permanente) quando a entrada do sistema é sinusoidal. Métodos de análise de
Fundamentos de Controlo
 Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
SEM Sistemas de Controle. Aula 4 - Controladores PID, Avanço, Atraso, Esp. Estados
 SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Projeto de Compensadores no Domínio da Frequência
 Projeto de Compensadores no Domínio da Frequência Maio de 214 Loop Shaping I No projeto de compensadores no domínio da frequência, parte-se do pressuposto de que o sistema a ser controlado pode ser representado
Projeto de Compensadores no Domínio da Frequência Maio de 214 Loop Shaping I No projeto de compensadores no domínio da frequência, parte-se do pressuposto de que o sistema a ser controlado pode ser representado
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
Sinais e Sistemas. Sinais e Sistemas Fundamentos. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Impulso Unitário Discreto 1 Impulso Unitário Discreto 0.9 0.8 δ[ n] 1,
Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Impulso Unitário Discreto 1 Impulso Unitário Discreto 0.9 0.8 δ[ n] 1,

Sinais e Sistemas. Sinais e Sistemas Fundamentos. Renato Dourado Maia. Faculdade de Ciência e Tecnologia de Montes Claros
 Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário Discreto
Sinais e Sistemas Sinais e Sistemas Fundamentos Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Impulso Unitário Discreto 1 Impulso Unitário Discreto

AULA #12. Estabilidade de Sistemas de Controle por
 AULA #12 Estabilidade de Sistemas de Controle por Realimentação Estabilidade de Sistemas de Controle por Realimentação A presença de medidores, controladores e elementos finais de controle afetam as características
AULA #12 Estabilidade de Sistemas de Controle por Realimentação Estabilidade de Sistemas de Controle por Realimentação A presença de medidores, controladores e elementos finais de controle afetam as características
(c) G d (z) = (d) G d (z) = A função de transferência do equivalente por invariância da resposta impulsional é = Z
 G d (z) = (d) G d (z) = A função de transferência do equivalente por invariância da resposta impulsional é = Z") Parte I Escolha múltipla h Tópicos de resolução A função de transferência do sistema cuja resposta ao degrau unitário está representada na figura é 8 (a) G(s) = s + 6s + 4 8 (b) G(s) = s + 4s + 4 8 (c)
Parte I Escolha múltipla h Tópicos de resolução A função de transferência do sistema cuja resposta ao degrau unitário está representada na figura é 8 (a) G(s) = s + 6s + 4 8 (b) G(s) = s + 4s + 4 8 (c)
PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA
 DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero
DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero
O Papel dos Pólos e Zeros
 Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação
 Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID)
 Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID)") Sistemas Realimentados Regulação e Tipo de sistema: Entrada de referência Entrada de distúrbio Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID) Fernando
Sistemas Realimentados Regulação e Tipo de sistema: Entrada de referência Entrada de distúrbio Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID) Fernando
Cursinho Triu. Aula 2 - Cinemática. 1 o semestre de Pedro Simoni Pasquini
 Cursinh Triu 1 semestre de 014 Aula - Cinemática Pedr Simni Pasquini pasquini@i.unicamp.br 1 Aceleraçã Será que a psiçã d bjet temp e a velcidade sã sucientes para descrever um prblema? A verdade é que
Cursinh Triu 1 semestre de 014 Aula - Cinemática Pedr Simni Pasquini pasquini@i.unicamp.br 1 Aceleraçã Será que a psiçã d bjet temp e a velcidade sã sucientes para descrever um prblema? A verdade é que
Deseja-se mostrar que, se o Método de Newton-Raphson converge, esta convergência se dá para a raiz (zero da função). lim
. lim") Estud da Cnvergência d Métd de Newtn-Raphsn Deseja-se mstrar que, se Métd de Newtn-Raphsn cnverge, esta cnvergência se dá para a raiz (zer da unçã. Hipótese: A raiz α é única n interval [a,b]. Deine-se
Estud da Cnvergência d Métd de Newtn-Raphsn Deseja-se mstrar que, se Métd de Newtn-Raphsn cnverge, esta cnvergência se dá para a raiz (zer da unçã. Hipótese: A raiz α é única n interval [a,b]. Deine-se
Laboratório de Projeto por Intermédio do Root Locus
 Laboratório de Projeto por Intermédio do Root Locus Revisão Revisão Entrada Expressão do erro estacionário Degrau, Rampa, Parábola, Dado o sistema: Método do Lugar das Raízes Exercício 1 - Controlador
Laboratório de Projeto por Intermédio do Root Locus Revisão Revisão Entrada Expressão do erro estacionário Degrau, Rampa, Parábola, Dado o sistema: Método do Lugar das Raízes Exercício 1 - Controlador
Fundamentos de Controle
 Fundamentos de Controle Modelagem matemática de sistemas de controle Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui
Fundamentos de Controle Modelagem matemática de sistemas de controle Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui
11/07/2012. Professor Leonardo Gonsioroski FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA.
 FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
SEJAFERA APOSTILA EXERCÍCIOS / QUESTÕES DE VESTIBULARES. Matrizes e Determinantes
 SEJAFERA APOSTILA EXERCÍCIOS / QUESTÕES DE VESTIBULARES Matrizes e Determinantes Depis de estudad uma matéria em matemática é imprtante que vcê reslva um númer significativ de questões para fiaçã de cnteúd.
SEJAFERA APOSTILA EXERCÍCIOS / QUESTÕES DE VESTIBULARES Matrizes e Determinantes Depis de estudad uma matéria em matemática é imprtante que vcê reslva um númer significativ de questões para fiaçã de cnteúd.
Controle de Processos
 17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 217 E. S. Tognetti (UnB) Controle
17484 Controle de Processos Aula: Função de Transferência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 217 E. S. Tognetti (UnB) Controle
COMPENSAÇÃO CP s(s+2)(s+8) CP1- Dada a FT em malha aberta G(s) = de um sistema com realimentação
(s+8) CP1- Dada a FT em malha aberta G(s) = de um sistema com realimentação") CP- CP- Dada a FT em malha aberta G(s) = COMPENSAÇÃO s(s+)(s+8) de um sistema com realimentação negativa unitária, compense esse sistema, utilizando métodos de lugar de raízes, de forma que: a) o sistema
CP- CP- Dada a FT em malha aberta G(s) = COMPENSAÇÃO s(s+)(s+8) de um sistema com realimentação negativa unitária, compense esse sistema, utilizando métodos de lugar de raízes, de forma que: a) o sistema