Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
|
|
|
- Matheus Sá Padilha
- 8 Há anos
- Visualizações:
Transcrição
1 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me. Eng. rcbeltrame@gmail.com

2 Conteúdo da unidade Introdução Definição da Transformada de Laplace Solução de equações diferenciais lineares e invariante no tempo Função de Transferência Conceito de pólos e zeros Estabilidade de sistemas Sistemas com atraso de transporte Análise da resposta transitória Análise da resposta em regime permanente Resposta em frequência e Diagrama de Bode Aulas 01 e 02 Aula 03 Aula 04 Aulas 05 e 06 2

3 Aula 05 Resposta em frequência e Diagrama de Bode Introdução Definição de módulo de fase Representação na forma de Bode Digramas de Bode Ganho K Fatores integral e derivativo (s) ±1 Fatores de primeira ordem (s + 1) ±1 Fatores quadráticos (s² + 2ζs/ω n + 1) ±1 Procedimento geral para construção 3
 ±1 Procedimento geral para")
4 Introdução Hendrik Wade Bode Americano ( ) Engenheiro, pesquisador e inventor Pioneiro em Teoria de controle (aplicada à aviação) Telecomunicações Em 1929 entra para o Bell Labs Em 1938 desenvolve o método gráfico conhecido como Diagrama de Bode Análise gráfica de ganho e fase de sistemas Ganhou diversos prêmios por suas contribuições científicas 4

5 Introdução Resposta em frequência Resposta em regime estacionário de um sistema submetido a um sinal de entrada senoidal Varia se a frequência do sinal de entrada ao longo de uma faixa de interesse e estuda se a resposta resultante A resposta em frequência pode ser obtida experimentalmente empregando geradores de sinal senoidal e equipamentos de medida de precisão 5

6 Resposta em regime para sinal senoidal Seja um sistema LTI definido por G s Onde o sinal de entrada x(t) ésenoidal e dado por Se o sistema for estável, o sinal de saída y(t), em regime estacionário, será dado por Onde Y s X s Xsenωt x t y t Ysen ωt φ Y X e Im φ arctg Re 6

 do sinal de saída são, em geral, diferentes do sinal")
7 Resposta em regime para sinal senoidal Observações Um sistema LTI submetido a uma excitação senoidal, terá como resposta, em regime estacionário, um sinal também senoidal de mesma frequência A amplitude e o ângulo (fase) do sinal de saída são, em geral, diferentes do sinal de entrada 7
 do sinal de saída são, em geral, diferentes do sinal")
8 Resposta em regime para sinal senoidal Função de transferência senoidal A função de transferência senoidal de qualquer sistema éobtida substituindo se s por jω Éuma grandeza complexa e pode ser representada por magnitude e fase, tendo como parâmetro a frequência Fase negativa Atraso de fase Fase positiva Avanço de fase Y jω X jω 8

9 Diagrama de Bode Função de transferência na forma de Bode G s z1 s 1 2 s z 1 1 n z p ω 1 2 s p s 2ξω sω s s 2ξ 1 s 1 p 1 ωn ωn n n Representação de uma função de transferência senoidal Gráfico do módulo (magnitude) x frequência Gráfico da fase x frequência Representação padrão do módulo Logaritmo Multiplicação dos módulos éconvertida em adição Unidade Decibel [db] Gjω 20 log 10 9

10 Ganho K 20 logk 0 arctg K 0 O ganho éuma curva horizontal O ângulo de fase do ganho K é nulo Possui o efeito de deslocar a curva do logaritmo da função de transferência para cima e para baixo 10

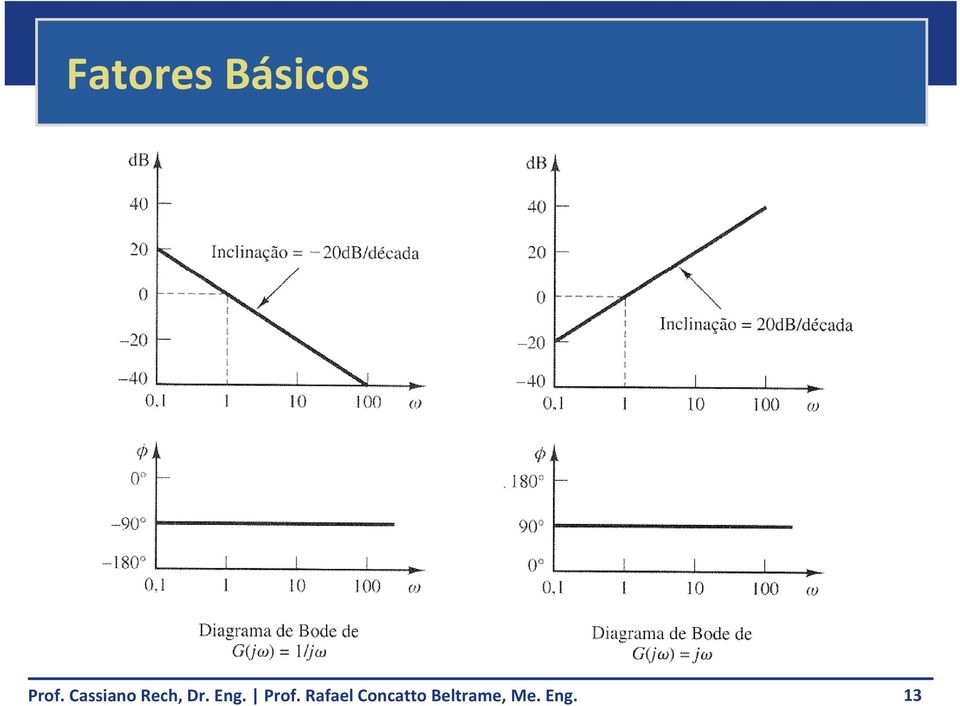
11 Fator integral e derivativo (s) ±1 Fator 1/s 1 jω 20 log 20 logω 1/ω Gjωarctg 90 0 Fator s 20 log 20 log jω ω ω arctg 0 90 o o 11

12 Diagrama de Bode Uma oitava Intervalo de frequência entre ω 1 e 2ω 1 Uma década Intervalo de frequência entre ω 1 e 10ω 1 Para ω = 1, tem se 1 Gjω 20 log 0 j1 Gjω 20 log j1 0 Para ω qualquer, tem se 1 jω 20 log 20 logω 1 arctg o arctg 90 0 o 1/ ω arctg 0 90 o 20 log 20 log jω ω ω arctg 0 90 o 12

13 13
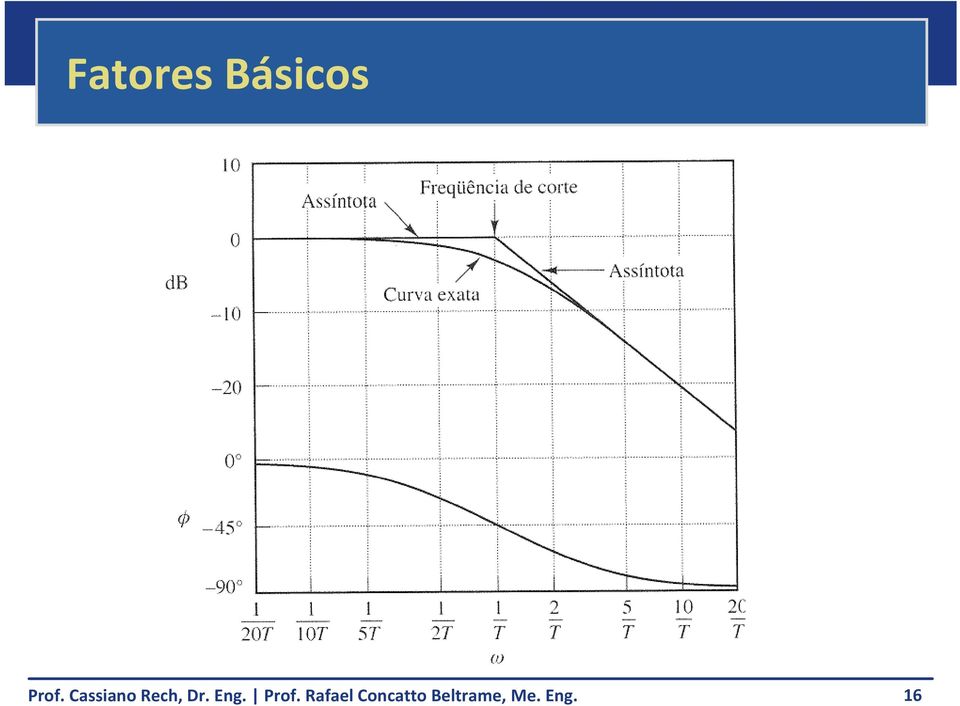
14 Fator de primeira ordem (s + 1) ±1 Fator 1/(s+1) 1 20 log 20 log 1ωT 1 jωt ωt ωt Gjωarctg arctg 1 1 Para ω << 1/T (baixas frequências) log Aproximação assintótica 0 Gjωarctg 1 0 o 2 14
 log 20 1 0 Aproximação assintótica")
15 Para ω >> 1/T (altas frequências) 20 logωt 90 arctg 1 o Aproximação assintótica Para ω =1/T (frequência de canto) 20 log Gjωarctg 45 1 o 15
 20 log 11 3 1 Gjωarctg 45")
16 16
17 Fator (s+1) No diagrama de Bode, para fatores recíprocos, as curvas de módulo em db e fase apenas trocam de sinal. Logo: 20 log 1 20 log 1 jωt ωt ωt Gjω arctg

18 18

19 Fator de segunda ordem (s² + 2ζs/ω n + 1) ±1 Fator 1/(s²/ω n2 + 2ζs/ω n + 1) 1 20 log jω jω 2ξ 1 ω n ω n 2 ω ω 20 log 1 2ξ 2 ωn ω n

20 ω 2ξ ω n arctg 2 1 ω ω n Para ω << ω n (baixas frequências) log Aproximação assintótica 0 Gjωarctg 0 1 o 20

21 Para ω >> ω n (altas frequências) Aproximação assintótica Para ω = ω n (frequência de canto) 2 ω ω 20 log 40 log 2 ωn ωn 2ξ Gjωarctg arctg0180 o 1 20 log 2ξ 2ξ Gjωarctg 90 0 o 21
22 22
23 Procedimento de construção 1) Reescrever a função de transferência na forma de Bode 2) Verificar se os termos de ordem superior (quadráticos) podem ser reescritos como termos de 1º ordem com raízes reais 3) Fazer s = jω 4) Separar cada um dos termos 5) Identificar as frequência de canto associadas a cada termo 6) Desenhar as curvas assintóticas Módulo em Fase em graus 7) Somar graficamente as curvas assintóticas 8) Realizar correções para o traçado da curva real 23
24 Bibliografia [1] OGATA, K. Engenharia de controle moderno. 3ª ed. Rio de Janeiro: Prentice Hall, [2] CHAPARRO, L. F. Signals and systems using MATLAB. Oxford: Elsevier,
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Aula 13 Análise no domínio da frequência
 Aula 13 Análise no domínio da frequência A resposta em frequência é a resposta do sistema em estado estacionário (ou em regime permanente) quando a entrada do sistema é sinusoidal. Métodos de análise de
Aula 13 Análise no domínio da frequência A resposta em frequência é a resposta do sistema em estado estacionário (ou em regime permanente) quando a entrada do sistema é sinusoidal. Métodos de análise de
Sistemas de Controle
 Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 8 - Resposta em Frequência Sistemas de Controle p. 1/46 Introdução Método da Resposta em Frequência Análise do sistema a partir da resposta
Sistemas de Controle Adriano Almeida Gonçalves Siqueira Aula 8 - Resposta em Frequência Sistemas de Controle p. 1/46 Introdução Método da Resposta em Frequência Análise do sistema a partir da resposta
11/07/2012. Professor Leonardo Gonsioroski FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA.
 FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
Introdução Diagramas de Bode Gráficos Polares Gráfico de Amplitude em db Versus Fase. Aula 14. Cristiano Quevedo Andrea 1
 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro 2012. 1 / 48 Resumo 1 Introdução 2 Diagramas de Bode 3
Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro 2012. 1 / 48 Resumo 1 Introdução 2 Diagramas de Bode 3
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
Departamento de Engenharia Química e de Petróleo UFF. Disciplina: TEQ102- CONTROLE DE PROCESSOS. Diagrama de Bode. Outros Processos de Separação
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS custo Diagrama de Bode Outros Processos de Separação Prof a Ninoska Bojorge 5.A. Traçado das Assíntotas Traçado
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS custo Diagrama de Bode Outros Processos de Separação Prof a Ninoska Bojorge 5.A. Traçado das Assíntotas Traçado
Circuitos Elétricos Resposta em Frequência Parte 1
 Introdução Circuitos Elétricos Resposta em Frequência Parte 1 Alessandro L. Koerich Engenharia de Computação Pontifícia Universidade Católica do Paraná (PUCPR) Na análise de circuitos CA estudamos como
Introdução Circuitos Elétricos Resposta em Frequência Parte 1 Alessandro L. Koerich Engenharia de Computação Pontifícia Universidade Católica do Paraná (PUCPR) Na análise de circuitos CA estudamos como
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil. Constituídodedoisgráficos: umdomóduloemdecibel(db) outrodoângulo de fase;
 outrodoângulo de fase;") Diagramas de Bode Constituídodedoisgráficos: umdomóduloemdecibel(db) outrodoângulo de fase; Ambos são traçados em relação à frequência em escala logarítmica; LembrequeologaritmodomódulodeG(jω) é20log 10
Diagramas de Bode Constituídodedoisgráficos: umdomóduloemdecibel(db) outrodoângulo de fase; Ambos são traçados em relação à frequência em escala logarítmica; LembrequeologaritmodomódulodeG(jω) é20log 10
Resumo. Sinais e Sistemas Transformada de Laplace. Resposta ao Sinal Exponencial. Transformada de Laplace
 Resumo Sinais e Sistemas Transformada de aplace lco@ist.utl.pt Instituto Superior Técnico Definição da transformada de aplace. Região de convergência. Propriedades da transformada de aplace. Sistemas caracterizados
Resumo Sinais e Sistemas Transformada de aplace lco@ist.utl.pt Instituto Superior Técnico Definição da transformada de aplace. Região de convergência. Propriedades da transformada de aplace. Sistemas caracterizados
Métodos de Resposta em Frequência Parte 1. Controle de Sistemas Renato Dourado Maia (Unimontes)
") Métodos de Resposta em Frequência Parte 1 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Introdução Os métodos de resposta em frequência, desenvolvidos por Nyquist e Bode nos anos 30, são mais
Métodos de Resposta em Frequência Parte 1 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Introdução Os métodos de resposta em frequência, desenvolvidos por Nyquist e Bode nos anos 30, são mais
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist
 Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Princípios de Telecomunicações. PRT60806 Aula 10: Efeitos da FT / Diagrama de Bode Professor: Bruno Fontana da silva 2014
 Princípios de Telecomunicações PRT686 Aula 1: Efeitos da FT / Diagrama de Bode Professor: Bruno Fontana da silva 214 1 Análise em frequência de sinais filtrados EFEITOS DE UM CANAL OU FILTRO SOBRE O SINAL
Princípios de Telecomunicações PRT686 Aula 1: Efeitos da FT / Diagrama de Bode Professor: Bruno Fontana da silva 214 1 Análise em frequência de sinais filtrados EFEITOS DE UM CANAL OU FILTRO SOBRE O SINAL
Método da Resposta da Freqüência
 Método da Resposta da Freqüência Introdução; Gráfico de Resposta de Freqüência; Medidas de Resposta de Freqüência; Especificação de Desempenho no Domínio da Freqüência; Diagrama Logarítmicos e de Magnitude
Método da Resposta da Freqüência Introdução; Gráfico de Resposta de Freqüência; Medidas de Resposta de Freqüência; Especificação de Desempenho no Domínio da Freqüência; Diagrama Logarítmicos e de Magnitude
EA616B Análise Linear de Sistemas Resposta em Frequência
 EA616B Análise Linear de Sistemas Resposta em Frequência Prof. Pedro L. D. Peres Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre 2013 Resposta em Frequência
EA616B Análise Linear de Sistemas Resposta em Frequência Prof. Pedro L. D. Peres Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre 2013 Resposta em Frequência
SISTEMAS DE CONTROLO. Objectivos Pedagógicos
 SISTEMAS DE CONTROLO Responsável: Prof. Doutor João Miguel Gago Pontes de Brito Lima Atendimento (Gab. 2.63): Terça e Quarta das 11:00 à 13:00 Objectivos Pedagógicos Pretende-se com esta disciplina fornecer
SISTEMAS DE CONTROLO Responsável: Prof. Doutor João Miguel Gago Pontes de Brito Lima Atendimento (Gab. 2.63): Terça e Quarta das 11:00 à 13:00 Objectivos Pedagógicos Pretende-se com esta disciplina fornecer
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Papel Bode 2. Papel Bode 3
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ- CONTROLE DE PROCESSOS custo Diagrama Outros Processos de Bode: Traçado Separação por assíntotas Prof a Ninoska Bojorge Papel Bode Papel
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ- CONTROLE DE PROCESSOS custo Diagrama Outros Processos de Bode: Traçado Separação por assíntotas Prof a Ninoska Bojorge Papel Bode Papel
0.1 Conceitos básicos
 Analise por resposta em frequencia 0 Conceitos básicos O método de análise por resposta em freqüência, desenvolvido anteriormente ao método do lugar das raízes, data do período de930 a 940 e foi apresentado
Analise por resposta em frequencia 0 Conceitos básicos O método de análise por resposta em freqüência, desenvolvido anteriormente ao método do lugar das raízes, data do período de930 a 940 e foi apresentado
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Modelagem Matemática de Sistemas
 Modelagem Matemática de Sistemas Função de Transferência Caracterização da relação entre uma entrada e uma saída (SISO) de um dado sistema linear e invariante no tempo (LIT). Definida como a relação entre
Modelagem Matemática de Sistemas Função de Transferência Caracterização da relação entre uma entrada e uma saída (SISO) de um dado sistema linear e invariante no tempo (LIT). Definida como a relação entre
Aula 18: Projeto de controladores no domínio da frequência
 Aula 18: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 26 de outubro de 2017. prof. Dr. Eduardo Bento Pereira
Aula 18: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 26 de outubro de 2017. prof. Dr. Eduardo Bento Pereira
Circuitos Elétricos Senoides e Fasores
 Circuitos Elétricos Senoides e Fasores Alessandro L. Koerich Engenharia de Computação Pontifícia Universidade Católica do Paraná (PUCPR) Introdução Corrente contínua x corrente alternada. Ver War of Currentes
Circuitos Elétricos Senoides e Fasores Alessandro L. Koerich Engenharia de Computação Pontifícia Universidade Católica do Paraná (PUCPR) Introdução Corrente contínua x corrente alternada. Ver War of Currentes
Introdução AVALIAÇÃO DE DESEMPENHO. No domínio do tempo. No domínio da freqüência. Função de transferência. Módulo e fase da função de transferência
 AVALIAÇÃO DE DESEMPENHO Introdução Introdução Análise no domínio do tempo Resposta ao degrau Resposta à rampa Aula anterior Resposta à parábola Análise no domínio da freqüência Diagramas de Bode Diagrama
AVALIAÇÃO DE DESEMPENHO Introdução Introdução Análise no domínio do tempo Resposta ao degrau Resposta à rampa Aula anterior Resposta à parábola Análise no domínio da freqüência Diagramas de Bode Diagrama
Universidade Presbiteriana Mackenzie. Controle II
 Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica Controle II Notas de Aula Prof. Marcio Eisencraft Segundo semestre de 004 Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica
Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica Controle II Notas de Aula Prof. Marcio Eisencraft Segundo semestre de 004 Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica
Métodos de Resposta em Freqüência
 Métodos de Resposta em Freqüência 1. Motivação 2. Gráficos de resposta em freqüência pag.1 Controle de Sistemas Lineares Aula 12 Métodos de Resposta em Freqüência Origem do termo? Entende-se por resposta
Métodos de Resposta em Freqüência 1. Motivação 2. Gráficos de resposta em freqüência pag.1 Controle de Sistemas Lineares Aula 12 Métodos de Resposta em Freqüência Origem do termo? Entende-se por resposta
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE
 RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
Análise e Processamento de Bio-Sinais. Mestrado Integrado em Engenharia Biomédica. Sinais e Sistemas. Licenciatura em Engenharia Física
 Análise e Processamento de Bio-Sinais Mestrado Integrado em Engenharia Biomédica Licenciatura em Engenharia Física Faculdade de Ciências e Tecnologia Slide Slide 1 1 Tópicos: Representação de Sinais por
Análise e Processamento de Bio-Sinais Mestrado Integrado em Engenharia Biomédica Licenciatura em Engenharia Física Faculdade de Ciências e Tecnologia Slide Slide 1 1 Tópicos: Representação de Sinais por
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Controle de Processos Aula: Análise da Resposta em Frequência
 107484 Controle de Processos Aula: Análise da Resposta em Frequência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
107484 Controle de Processos Aula: Análise da Resposta em Frequência Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
Controle 2 - Introdução
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 28 de outubro de 2013 Permanência 5 as e 6 as pela manhã Agendar com antecedência moritz@utfpr.edu.br http://paginapessoal.utfpr.edu.br/moritz
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 28 de outubro de 2013 Permanência 5 as e 6 as pela manhã Agendar com antecedência moritz@utfpr.edu.br http://paginapessoal.utfpr.edu.br/moritz
Controle I. Análise de resposta transitória Sistemas de primeira ordem
 Controle I Análise de resposta transitória Sistemas de primeira ordem input S output Sistemas de primeira ordem Sistema de primeira ordem do tipo G (s) a bs c input a bs c output Sistemas de primeira
Controle I Análise de resposta transitória Sistemas de primeira ordem input S output Sistemas de primeira ordem Sistema de primeira ordem do tipo G (s) a bs c input a bs c output Sistemas de primeira
Métodos de Resposta em Frequência Parte 2. Controle de Sistemas Renato Dourado Maia (Unimontes)
") Métodos de Resposta em Frequência Parte 2 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Sistemas de Fase Mínima e Não Mínima Um sistema pode ter zeros no semiplano direito e ser também estável.
Métodos de Resposta em Frequência Parte 2 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Sistemas de Fase Mínima e Não Mínima Um sistema pode ter zeros no semiplano direito e ser também estável.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Modelagem no Domínio do Tempo. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Carlos Alexandre Mello 1 Modelagem no Domínio da Frequência A equação diferencial de um sistema é convertida em função de transferência, gerando um modelo matemático de um sistema que algebricamente relaciona
Carlos Alexandre Mello 1 Modelagem no Domínio da Frequência A equação diferencial de um sistema é convertida em função de transferência, gerando um modelo matemático de um sistema que algebricamente relaciona
Métodos de Resposta em Freqüência
 Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
Circuitos Elétricos III
 Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais A Transformada de Laplace em análise de circuitos parte 2 Equivalente
Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais A Transformada de Laplace em análise de circuitos parte 2 Equivalente
Engenharia de Controle
 Engenharia de Controle Prof. Fernando de Oliveira Souza Contato: Sala 2523 (BLOCO 1) e-mail: fosouza@cpdee.ufmg.br www.cpdee.ufmg.br/ fosouza Terças-feiras (20h55 às 22h35) e Sextas-feiras (19h00 às 20h40)
Engenharia de Controle Prof. Fernando de Oliveira Souza Contato: Sala 2523 (BLOCO 1) e-mail: fosouza@cpdee.ufmg.br www.cpdee.ufmg.br/ fosouza Terças-feiras (20h55 às 22h35) e Sextas-feiras (19h00 às 20h40)
Matemática para Engenharia
 Matemática para Engenharia Profa. Grace S. Deaecto Faculdade de Engenharia Mecânica / UNICAMP 13083-860, Campinas, SP, Brasil. grace@fem.unicamp.br Segundo Semestre de 2013 Profa. Grace S. Deaecto ES401
Matemática para Engenharia Profa. Grace S. Deaecto Faculdade de Engenharia Mecânica / UNICAMP 13083-860, Campinas, SP, Brasil. grace@fem.unicamp.br Segundo Semestre de 2013 Profa. Grace S. Deaecto ES401
Amostrador PAM A/D PCM D/A PAM Filtro. Figura 1 Digrama de Blocos PCM
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA SISTEMAS DE TELECOMUNICAÇÕES I AULA PRÁTICA MODULAÇÃO POR AMPLITUDE DE PULSOS 1. Introdução Como o sinal
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA SISTEMAS DE TELECOMUNICAÇÕES I AULA PRÁTICA MODULAÇÃO POR AMPLITUDE DE PULSOS 1. Introdução Como o sinal
Diagramas de Bode. Introdução
 Diagramas de Bode Introdução Sistemas e Sinais Diagramas de Bode Escala Logarítmica de Amplitude Escala Logarítmica de Frequência Análise dos Termos das Funções de Resposta em Frequência Composição do
Diagramas de Bode Introdução Sistemas e Sinais Diagramas de Bode Escala Logarítmica de Amplitude Escala Logarítmica de Frequência Análise dos Termos das Funções de Resposta em Frequência Composição do
Modelagem no Domínio da Frequência. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
Modelagem no Domínio da Frequência Carlos Alexandre Mello 1 Transformada de Laplace O que são Transformadas? Quais as mais comuns: Laplace Fourier Cosseno Wavelet... 2 Transformada de Laplace A transf.
2 - Modelos em Controlo por Computador
 Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador 1 2 - Modelos em Controlo por Computador Objectivo: Introduzir a classe de modelos digitais que são empregues nesta disciplina
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador 1 2 - Modelos em Controlo por Computador Objectivo: Introduzir a classe de modelos digitais que são empregues nesta disciplina
SISTEMAS DE CONTROLE II
 SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
REPRESENTAÇÃO FASORIAL DE SINAIS SENOIDAIS
 REPRESENTAÇÃO FASORIAL DE SINAIS SENOIDAIS Neste capítulo será apresentada uma prática ferramenta gráfica e matemática que permitirá e facilitará as operações algébricas necessárias à aplicação dos métodos
REPRESENTAÇÃO FASORIAL DE SINAIS SENOIDAIS Neste capítulo será apresentada uma prática ferramenta gráfica e matemática que permitirá e facilitará as operações algébricas necessárias à aplicação dos métodos
Filtros Prof. Eng Luiz Antonio Vargas Pinto
 Filtros Prof. Eng Luiz Antonio Vargas Pinto Passivos e Ativos Passivos São associações elétrica que respondem a variação de freqüência, podendo produzir resultados satisfatórios em eliminar ou apenas filtrar
Filtros Prof. Eng Luiz Antonio Vargas Pinto Passivos e Ativos Passivos São associações elétrica que respondem a variação de freqüência, podendo produzir resultados satisfatórios em eliminar ou apenas filtrar
5 Transformadas de Laplace
 5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
Análise de Circuitos Elétricos III
 Análise de Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais Introdução à Transformada de Laplace A Transformada
Análise de Circuitos Elétricos III Prof. Danilo Melges (danilomelges@cpdee.ufmg.br) Depto. de Engenharia Elétrica Universidade Federal de Minas Gerais Introdução à Transformada de Laplace A Transformada
Corrente Alternada Transformadores Retificador de Meia Onda
 Centro Federal de Educação Tecnológica de Santa Catarina Departamento de Eletrônica Eletrônica Básica e Projetos Eletrônicos Corrente Alternada Transformadores Retificador de Meia Onda Clóvis Antônio Petry,
Centro Federal de Educação Tecnológica de Santa Catarina Departamento de Eletrônica Eletrônica Básica e Projetos Eletrônicos Corrente Alternada Transformadores Retificador de Meia Onda Clóvis Antônio Petry,
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA. Plano de Ensino
 DISCIPLINA: Sinais e Sistemas CÓDIGO: MEE003 Validade: A partir do 1º semestre de 2009. Carga Horária: 5 horas-aula Créditos: 03 Área de Concentração / Módulo: Modelagem e Controle de Sistemas / Disciplinas
DISCIPLINA: Sinais e Sistemas CÓDIGO: MEE003 Validade: A partir do 1º semestre de 2009. Carga Horária: 5 horas-aula Créditos: 03 Área de Concentração / Módulo: Modelagem e Controle de Sistemas / Disciplinas
EXPERIÊNCIA 3. Identificação I: Resposta em frequência
 EXPERIÊNCIA 3 Identificação I: Resposta em frequência PTC 2512 Laboratório de Controle 2º semestre de 2016 Bruno Angélico Laboratório de Automação e Controle Departamento de Engenharia de Telecomunicações
EXPERIÊNCIA 3 Identificação I: Resposta em frequência PTC 2512 Laboratório de Controle 2º semestre de 2016 Bruno Angélico Laboratório de Automação e Controle Departamento de Engenharia de Telecomunicações
Capítulo 4 Resposta em frequência
 Capítulo 4 Resposta em frequência 4.1 Noção do domínio da frequência 4.2 Séries de Fourier e propriedades 4.3 Resposta em frequência dos SLITs 1 Capítulo 4 Resposta em frequência 4.1 Noção do domínio da
Capítulo 4 Resposta em frequência 4.1 Noção do domínio da frequência 4.2 Séries de Fourier e propriedades 4.3 Resposta em frequência dos SLITs 1 Capítulo 4 Resposta em frequência 4.1 Noção do domínio da
Análise e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes
 Análise e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Saulo Dornellas Universidade Federal do Vale do São Francisco Juazeiro - BA Dornellas (UNIVASF) Juazeiro - BA 1 / 44 Análise do
Análise e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Saulo Dornellas Universidade Federal do Vale do São Francisco Juazeiro - BA Dornellas (UNIVASF) Juazeiro - BA 1 / 44 Análise do
Departamento de Engenharia Química e de Petróleo UFF. Disciplina: TEQ102- CONTROLE DE PROCESSOS. Diagrama de Bode. Outros Processos de Separação
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ1- CONTROLE DE PROCESSOS custo Diagrama de Bode Outros Processos de Separação Prof a Ninoska Bojorge Informação Papel Bode 1 3 Papel
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ1- CONTROLE DE PROCESSOS custo Diagrama de Bode Outros Processos de Separação Prof a Ninoska Bojorge Informação Papel Bode 1 3 Papel
Resposta Transitória de Circuitos com Elementos Armazenadores de Energia
 ENG 1403 Circuitos Elétricos e Eletrônicos Resposta Transitória de Circuitos com Elementos Armazenadores de Energia Guilherme P. Temporão 1. Introdução Nas últimas duas aulas, vimos como circuitos com
ENG 1403 Circuitos Elétricos e Eletrônicos Resposta Transitória de Circuitos com Elementos Armazenadores de Energia Guilherme P. Temporão 1. Introdução Nas últimas duas aulas, vimos como circuitos com
Circuitos Elétricos Análise de Potência em CA
 Introdução Circuitos Elétricos Análise de Potência em CA Alessandro L. Koerich Engenharia de Computação Pontifícia Universidade Católica do Paraná (PUCPR) Potência é a quantidade de maior importância em
Introdução Circuitos Elétricos Análise de Potência em CA Alessandro L. Koerich Engenharia de Computação Pontifícia Universidade Católica do Paraná (PUCPR) Potência é a quantidade de maior importância em
LABORATÓRIO DE CONTROLE I APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 5: APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM COLEGIADO DE ENGENHARIA
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 5: APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM COLEGIADO DE ENGENHARIA
Estabilidade. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Estabilidade Carlos Alexandre Mello 1 Introdução Já vimos que existem três requisitos fundamentais para projetar um sistema de controle: Resposta Transiente Estabilidade Erros de Estado Estacionário Estabilidade
Estabilidade Carlos Alexandre Mello 1 Introdução Já vimos que existem três requisitos fundamentais para projetar um sistema de controle: Resposta Transiente Estabilidade Erros de Estado Estacionário Estabilidade
5910170 Física II Ondas, Fluidos e Termodinâmica USP Prof. Antônio Roque Aula 1
 597 Física II Ondas, Fluidos e Termodinâmica USP Prof. Antônio Roque Movimentos Periódicos Para estudar movimentos oscilatórios periódicos é conveniente ter algum modelo físico em mente. Por exemplo, um
597 Física II Ondas, Fluidos e Termodinâmica USP Prof. Antônio Roque Movimentos Periódicos Para estudar movimentos oscilatórios periódicos é conveniente ter algum modelo físico em mente. Por exemplo, um
Capítulo 3 Sistemas de Controle com Realimentação
 Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
LABORATÓRIO DE CONTROLE I ESTUDO DE COMPENSADORES DE FASE
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 4: ESTUDO DE COMPENSADORES DE FASE COLEGIADO DE ENGENHARIA ELÉTRICA DISCENTES: Lucas
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 4: ESTUDO DE COMPENSADORES DE FASE COLEGIADO DE ENGENHARIA ELÉTRICA DISCENTES: Lucas
Caracterização temporal de circuitos: análise de transientes e regime permanente. Condições iniciais e finais e resolução de exercícios.
 Conteúdo programático: Elementos armazenadores de energia: capacitores e indutores. Revisão de características técnicas e relações V x I. Caracterização de regime permanente. Caracterização temporal de
Conteúdo programático: Elementos armazenadores de energia: capacitores e indutores. Revisão de características técnicas e relações V x I. Caracterização de regime permanente. Caracterização temporal de
Departamento de Matemática - UEL - 2010. Ulysses Sodré. http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
 Matemática Essencial Extremos de funções reais Departamento de Matemática - UEL - 2010 Conteúdo Ulysses Sodré http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
Matemática Essencial Extremos de funções reais Departamento de Matemática - UEL - 2010 Conteúdo Ulysses Sodré http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
INSTRUMENTAÇÃO INDUSTRIAL 1. INTRODUÇÃO / DEFINIÇÕES
 1 INSTRUMENTAÇÃO INDUSTRIAL 1. INTRODUÇÃO / DEFINIÇÕES 1.1 - Instrumentação Importância Medições experimentais ou de laboratório. Medições em produtos comerciais com outra finalidade principal. 1.2 - Transdutores
1 INSTRUMENTAÇÃO INDUSTRIAL 1. INTRODUÇÃO / DEFINIÇÕES 1.1 - Instrumentação Importância Medições experimentais ou de laboratório. Medições em produtos comerciais com outra finalidade principal. 1.2 - Transdutores
Circuitos Elétricos II
 Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Diagramas de Bode 1 Introdução Função de transferência É a relação, dependente da frequência,
Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Diagramas de Bode 1 Introdução Função de transferência É a relação, dependente da frequência,
ANÁLISE LINEAR DE SISTEMAS
 ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
Transformada de Laplace. Parte 3
 Transformada de Laplace Parte 3 Elementos de circuito no domínio da frequência O resistor no domínio da frequência Pela lei de OHM : v= Ri A transformada da equação acima é V(s) = R I(s) O indutor no domínio
Transformada de Laplace Parte 3 Elementos de circuito no domínio da frequência O resistor no domínio da frequência Pela lei de OHM : v= Ri A transformada da equação acima é V(s) = R I(s) O indutor no domínio
Resposta em Frequência de Sistemas LTI 1
 Resposta em Frequência de Sistemas LTI A resposta em frequência de um sistema LTI fornece a caracterização intuitiva do comportamento entrada-saída do sistema. Isto ocorre porque a convolução no domínio
Resposta em Frequência de Sistemas LTI A resposta em frequência de um sistema LTI fornece a caracterização intuitiva do comportamento entrada-saída do sistema. Isto ocorre porque a convolução no domínio
APLICAÇÕES DA DERIVADA
 Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
O AMPLIFICADOR LOCK-IN
 O AMPLIFICADOR LOCK-IN AUTORES: RAFAEL ASTUTO AROUCHE NUNES MARCELO PORTES DE ALBUQUERQUE MÁRCIO PORTES DE ALBUQUERQUE OUTUBRO 2007-1 - SUMÁRIO RESUMO... 3 INTRODUÇÃO... 4 PARTE I: O QUE É UM AMPLIFICADOR
O AMPLIFICADOR LOCK-IN AUTORES: RAFAEL ASTUTO AROUCHE NUNES MARCELO PORTES DE ALBUQUERQUE MÁRCIO PORTES DE ALBUQUERQUE OUTUBRO 2007-1 - SUMÁRIO RESUMO... 3 INTRODUÇÃO... 4 PARTE I: O QUE É UM AMPLIFICADOR
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação
 Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
CIRCUITOS ELÉTRICOS RESOLUÇÃO DE CIRCUITOS TRANSITÓRIOS NO DOMÍNIO DA FREQÜÊNCIA
 1 CIRCUITOS ELÉTRICOS RESOLUÇÃO DE CIRCUITOS TRANSITÓRIOS NO DOMÍNIO DA FREQÜÊNCIA Simulação de chaves utilizando a função degrau a) Fonte de tensão que entra em operação em t = 0 Substituindo a chave
1 CIRCUITOS ELÉTRICOS RESOLUÇÃO DE CIRCUITOS TRANSITÓRIOS NO DOMÍNIO DA FREQÜÊNCIA Simulação de chaves utilizando a função degrau a) Fonte de tensão que entra em operação em t = 0 Substituindo a chave
Números Complexos. Capítulo 1. 1.1 Unidade Imaginária. 1.2 Números complexos. 1.3 O Plano Complexo
 Capítulo 1 Números Complexos 11 Unidade Imaginária O fato da equação x 2 + 1 = 0 (11) não ser satisfeita por nenhum número real levou à denição dos números complexos Para solucionar (11) denimos a unidade
Capítulo 1 Números Complexos 11 Unidade Imaginária O fato da equação x 2 + 1 = 0 (11) não ser satisfeita por nenhum número real levou à denição dos números complexos Para solucionar (11) denimos a unidade
Métodos Matemáticos para Engenharia de Informação
 Métodos Matemáticos para Engenharia de Informação Gustavo Sousa Pavani Universidade Federal do ABC (UFABC) 3º Trimestre - 2009 Aulas 1 e 2 Sobre o curso Bibliografia: James Stewart, Cálculo, volume I,
Métodos Matemáticos para Engenharia de Informação Gustavo Sousa Pavani Universidade Federal do ABC (UFABC) 3º Trimestre - 2009 Aulas 1 e 2 Sobre o curso Bibliografia: James Stewart, Cálculo, volume I,
Aula 9. Diagrama de Bode
 Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Modelo Matemático e Controle de um Robô Móvel. 2.1. Modelo do motor que aciona cada roda do robô
 1. Introdução Modelo Matemático e Controle de um Robô Móvel Nesta aula serão apresentadas leis de controle que permitem a um robô móvel nãoholonômico navegar de maneira coordenada desde uma localização
1. Introdução Modelo Matemático e Controle de um Robô Móvel Nesta aula serão apresentadas leis de controle que permitem a um robô móvel nãoholonômico navegar de maneira coordenada desde uma localização
Séries de Fourier Aplicações em Geral Transformada de Fourier (TF) Aplicações específicas da TF Conclusões
 Aplicações específicas da TF Conclusões") Sinais e Sistemas Aplicações das séries e transformadas de Fourier Séries de Fourier Aplicações em Geral Transformada de Fourier (TF) Aplicações específicas da TF Conclusões Baseado no seguinte material:
Sinais e Sistemas Aplicações das séries e transformadas de Fourier Séries de Fourier Aplicações em Geral Transformada de Fourier (TF) Aplicações específicas da TF Conclusões Baseado no seguinte material:
Sistema de excitação
 Sistema de excitação Introdução Introdução A função do sistema de excitação é estabelecer a tensão interna do gerador síncrono; Em consequência,o sistema de excitação é responsável não somente pela tensão
Sistema de excitação Introdução Introdução A função do sistema de excitação é estabelecer a tensão interna do gerador síncrono; Em consequência,o sistema de excitação é responsável não somente pela tensão
Desempenho de Sistemas de Controle Realimentados
 Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
Filtros de sinais. Conhecendo os filtros de sinais.
 Filtros de sinais Nas aulas anteriores estudamos alguns conceitos importantes sobre a produção e propagação das ondas eletromagnéticas, além de analisarmos a constituição de um sistema básico de comunicações.
Filtros de sinais Nas aulas anteriores estudamos alguns conceitos importantes sobre a produção e propagação das ondas eletromagnéticas, além de analisarmos a constituição de um sistema básico de comunicações.
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA LISTA DE EXERCÍCIOS #12 (1) FILTRO PASSA-FAIXA Mostre que o circuito
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA LISTA DE EXERCÍCIOS #12 (1) FILTRO PASSA-FAIXA Mostre que o circuito
Circuitos Osciladores
 Circuitos Osciladores Em virtude da realimentação do sinal, a estabilidade do circuito deve ser analisada pois quando a freqüência aumenta, o deslocamento de fase varia e como parte deste sinal é adicionado
Circuitos Osciladores Em virtude da realimentação do sinal, a estabilidade do circuito deve ser analisada pois quando a freqüência aumenta, o deslocamento de fase varia e como parte deste sinal é adicionado
TRABALHO 1 - ESTUDO DE CIRCUITOS RC e RLC
 TRABALHO - ESTUDO DE CIRCUITOS RC e RLC Objectivo - Verificar o comportamento em frequência de circuitos RC e RLC. A função de transferência e o seu significado na análise de sistemas Lineares e Invariantes
TRABALHO - ESTUDO DE CIRCUITOS RC e RLC Objectivo - Verificar o comportamento em frequência de circuitos RC e RLC. A função de transferência e o seu significado na análise de sistemas Lineares e Invariantes
Aula 19: Projeto de controladores no domínio da frequência
 Aula 19: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 14 de novembro de 2017. prof. Dr. Eduardo Bento Pereira
Aula 19: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 14 de novembro de 2017. prof. Dr. Eduardo Bento Pereira
REAL LACOS: CONTROLE DIGITAL EM TEMPO REAL
 REAL LACOS: CONTROLE DIGITAL EM TEMPO REAL Andreya Prestes da Silva 1, Rejane de Barros Araújo 1, Rosana Paula Soares Oliveira 1 e Luiz Affonso Guedes 1 Universidade Federal do ParáB 1 Laboratório de Controle
REAL LACOS: CONTROLE DIGITAL EM TEMPO REAL Andreya Prestes da Silva 1, Rejane de Barros Araújo 1, Rosana Paula Soares Oliveira 1 e Luiz Affonso Guedes 1 Universidade Federal do ParáB 1 Laboratório de Controle
DISCIPLINA: Eletrônica II
 DISCIPLINA: Eletrônica II Vigência: a partir de 2007/1 Período Letivo: 7º semestre Carga Horária Total: 60h Código: EE.761 Ementa: Amplificadores diferenciais e de múltiplos estágios, circuitos eletrônicos
DISCIPLINA: Eletrônica II Vigência: a partir de 2007/1 Período Letivo: 7º semestre Carga Horária Total: 60h Código: EE.761 Ementa: Amplificadores diferenciais e de múltiplos estágios, circuitos eletrônicos
Tópico 02: Movimento Circular Uniforme; Aceleração Centrípeta
 Aula 03: Movimento em um Plano Tópico 02: Movimento Circular Uniforme; Aceleração Centrípeta Caro aluno, olá! Neste tópico, você vai aprender sobre um tipo particular de movimento plano, o movimento circular
Aula 03: Movimento em um Plano Tópico 02: Movimento Circular Uniforme; Aceleração Centrípeta Caro aluno, olá! Neste tópico, você vai aprender sobre um tipo particular de movimento plano, o movimento circular
Root Locus (Método do Lugar das Raízes)
") Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Sistemas de 1ª e 2ª Ordem - Resposta em Frequência
 Sistemas de 1ª e ª Ordem - Resposta em Frequência Curso de Engª de Electrotécnica 5/6º Trabalho de Laboratório CONTROLO Preparado por Rogério Largo Revisto em Out/99 Revisto por Carlos Miguel Fernandes
Sistemas de 1ª e ª Ordem - Resposta em Frequência Curso de Engª de Electrotécnica 5/6º Trabalho de Laboratório CONTROLO Preparado por Rogério Largo Revisto em Out/99 Revisto por Carlos Miguel Fernandes
EA616 - Análise Linear de Sistemas Aula 28 - Estabilidade do Estado
 Aula 28 EA616 - Análise Linear de Sistemas Aula 28 - Estabilidade do Estado Prof. Ricardo C.L.F. Oliveira Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre
Aula 28 EA616 - Análise Linear de Sistemas Aula 28 - Estabilidade do Estado Prof. Ricardo C.L.F. Oliveira Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
 MATEMÁTICA I AULA 07: TESTES PARA EXTREMOS LOCAIS, CONVEXIDADE, CONCAVIDADE E GRÁFICO TÓPICO 02: CONVEXIDADE, CONCAVIDADE E GRÁFICO Este tópico tem o objetivo de mostrar como a derivada pode ser usada
MATEMÁTICA I AULA 07: TESTES PARA EXTREMOS LOCAIS, CONVEXIDADE, CONCAVIDADE E GRÁFICO TÓPICO 02: CONVEXIDADE, CONCAVIDADE E GRÁFICO Este tópico tem o objetivo de mostrar como a derivada pode ser usada
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA LISTA DE EXERCÍCIOS #11 (1) O circuito a seguir é usado como pré-amplificador
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA LISTA DE EXERCÍCIOS #11 (1) O circuito a seguir é usado como pré-amplificador
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Uma lei que associa mais de um valor y a um valor x é uma relação, mas não uma função. O contrário é verdadeiro (isto é, toda função é uma relação).
.") 5. FUNÇÕES DE UMA VARIÁVEL 5.1. INTRODUÇÃO Devemos compreender função como uma lei que associa um valor x pertencente a um conjunto A a um único valor y pertencente a um conjunto B, ao que denotamos por
5. FUNÇÕES DE UMA VARIÁVEL 5.1. INTRODUÇÃO Devemos compreender função como uma lei que associa um valor x pertencente a um conjunto A a um único valor y pertencente a um conjunto B, ao que denotamos por
1.5 O oscilador harmónico unidimensional
 1.5 O oscilador harmónico unidimensional A energia potencial do oscilador harmónico é da forma U = 2 2, (1.29) onde é a constante de elasticidade e a deformação da mola. Substituindo (1.29) em (1.24) obtemos
1.5 O oscilador harmónico unidimensional A energia potencial do oscilador harmónico é da forma U = 2 2, (1.29) onde é a constante de elasticidade e a deformação da mola. Substituindo (1.29) em (1.24) obtemos
Universidade Estadual de Campinas Faculdade de Eng a Elétrica & Computação Departamento de Telemática
 1 Universidade Estadual de Campinas Faculdade de Eng a Elétrica & Computação Departamento de Telemática NOTAS DE AULAS DE EA721 PRINCÍPIOS DE CONTROLE & SERVOMECANISMOS Paulo Augusto Valente Ferreira Fevereiro
1 Universidade Estadual de Campinas Faculdade de Eng a Elétrica & Computação Departamento de Telemática NOTAS DE AULAS DE EA721 PRINCÍPIOS DE CONTROLE & SERVOMECANISMOS Paulo Augusto Valente Ferreira Fevereiro
Fundamentos de Controle
 Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
As fases na resolução de um problema real podem, de modo geral, ser colocadas na seguinte ordem:
 1 As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia e não têm a intenção de substituir o livro-texto, nem qualquer outra bibliografia. Introdução O Cálculo Numérico
1 As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia e não têm a intenção de substituir o livro-texto, nem qualquer outra bibliografia. Introdução O Cálculo Numérico
Laboratório de Conversão Eletromecânica de Energia B
 Laboratório de Conversão Eletromecânica de Energia B Prof a. Katia C. de Almeida 1 Obtenção Experimental dos Parâmetros do Circuito Equivalente do Motor de Indução Monofásico 1.1 Introdução 1.1.1 Motores
Laboratório de Conversão Eletromecânica de Energia B Prof a. Katia C. de Almeida 1 Obtenção Experimental dos Parâmetros do Circuito Equivalente do Motor de Indução Monofásico 1.1 Introdução 1.1.1 Motores