Aula 7 Robótica Móvel Mapeamento
|
|
|
- Matheus Escobar Teixeira
- 5 Há anos
- Visualizações:
Transcrição

1 Aua 7 Robótica Móve Mapeamento Prof. Assoc. Marceo Becker SEM - EESC - USP Laboratório de Robótica Móve LabRoM
2 Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada 2








3 Métodos de Representar e Modear Ambientes Não Apicáve Mapa do Tesouro Odometria Caro e Infexíve Pista de Pouso à Noite Modificar Ambientes - Marcas Torre Eiffe Desafio para a A.I... Porta de Eevador Corredor Reconhecimento de Características 3
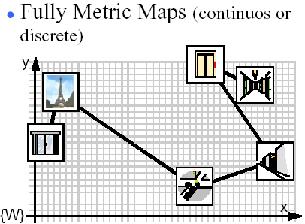
4 Mapeamento Mapa Métrico: Informações Detahadas Desenhos tipo CAD Características Métricas do Ambiente Mapa Topoógico: panejamento de trajetórias grosseiro Nós Arcos Grid Map Probabiidades panejamento de trajetórias detahado 4

5 Mapas Ambiente Mapa Métrico Mapa Topoógico Mapa Probabiístico (Grid Map) 5


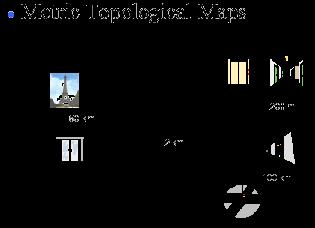
6 Mapeamento Mapa Métrico Mapa Topoógico Mapa Métrico-Topoógico 6
7 Mapa Métrico Representação Compacta Reações Geométricas do Ambiente Linhas ou arcos são os eementos mais comuns mas podem ser usadas quaisquer figuras geométricas Boa ferramenta se o ambiente é competamente conhecido... Pode ser difíci de impementar o panejamento de trajetórias Parâmetros Típicos para representar segmentos de reta L = i ( d(i),a(i),x(i), y(i),x(i), y(i) ) ini ini fim Parâmetros Típicos para representar arcos A i = fim ( r(i), α(i), α(i),x(i), y(i) ) ini fim centro centro L3 d(i) L9 L6 L8 L2 [x(i),y(i)] ini α(i) fim a(i) α(i) ini r(i) L4 L7 [x(i),y(i)] centro L5 L1 [x(i),y(i)] fim 7
,y(i) a(i,j),d(i,j) Observação do")
8 Mapa Topoógico Nós e Arcos reações reativas entre os nós Boa ferramenta para panejamento de trajetórias As Trajetórias são panejadas de acordo com aguma função que deve ser minimizada Difíci de impementar um panejamento detahado de Trajetórias Componentes Típicos de um Nó x(i),y(i) a(i,j),d(i,j) Observação do nó i 8
: p x, y = [ 0,1] Hans P. Moravec & A.E. Efes, 1985 O número de céuas pode se tornar muito grande.")
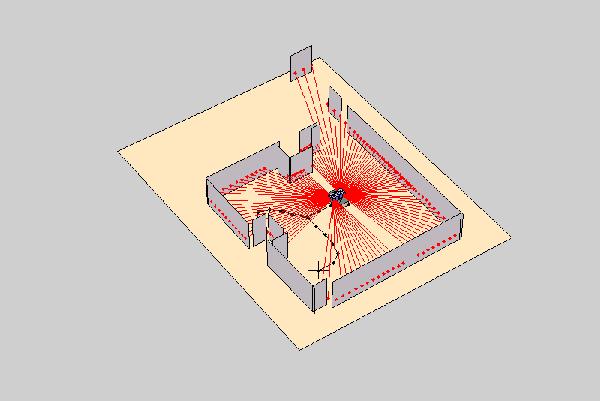
9 Mapa Probabiístico (Grid Map) Representação Discreta do mundo (ambiente) Consome muita memória Bom para panejamento detahado de trajetórias Fáci de incorporar diferentes eituras de diferentes sensores Robusto contra ruído de sensores O ambiente deve ser conhecido... Cada céua do grid (x,y): p x, y = [ 0,1] Hans P. Moravec & A.E. Efes, 1985 O número de céuas pode se tornar muito grande. Por exempo, um ambiente de 100 x 200 m com um mapa de resoução de 5 cm terá 8 mihões de céuas (cada qua com 2 vaores...). 9


10 Navegação Humana? Topoógica e sujeita a medidas imprecisas... 10
11 Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada 11
12 m que consiste o Mapeamento? De modo muito Simpificado!! 2) Essa nova informação é adicionada ao mapa do ambiente... 1) O robô observa ago no ambiente... 3) Cacuar uma nova trajetória para exporação baseado nas informações atuaizadas (1) Útima Observação Mapa Existente Mapa Atuaizado 12
13 Objetivo do Mapeamento Produzir e atuaizar Mapas dos ambientes indoor nos quais o veícuo irá se desocar Probema: ocaização partida 10 m S.Thrun - CMU 13
14 Incertezas Por natureza, sujeitos a incertezas As incertezas vêm de 4 fatores principais: aeatoridade, imprevisibiidade do ambiente e do veícuo imitações dos sensores, ruídos modeos inacurados Uso de Paradigmas Probabiísticos e Fuzzy Logic capazes de idar com modeos inacurados capazes de idar com as imperfeições dos sensores robustos em apicações reais 14
15 Locaização do Robô: Probema Probabiístico Incertezas tratadas através de fitros: Fitro de Kaman Fitro de Kaman Extendido Fitro de Partícuas ETC. Usado para: Mapeamento Locaização Modeagem 15
16 Probema: Mapeamento e Locaização Simutâneos Probema do tipo cássico: Quem nasceu primeiro, o ovo ou a gainha? Mapear sabendo a posição é simpes Locaizar-se em um Mapa dado é simpes Porém, fazer ambos simutaneamente é um probema! Atuamente, as mehores souções são as Probabiísticas! 16


17 Mapear apenas com odometria Raw Data mapa e exporação S.Thrun - CMU 17


18 Mapear apenas com odometria mapa e exporação Raw Data Inte research Lab - USA 18
19 Exempo de Mapeamento S.Thrun - CMU 19
20 Exempo de Mapeamento 20
21 Como fazer o Mapeamento? Estimativa da posição LS - Least Square ML - Maximum Likeihood EKF - Extended Kaman Fiter EKF é muito empregado para resover probemas d e o c a i z a ç ã o e m diversas apicações em robótica, navegação de aeronaves, foguetes, satéites, mísseis, etc. Extended Kaman Fiter [Schiee et a. 94], [Weiß et a. 94], [Borenstein 96], [Gutmann et a. 96, 98], [Arras 98] 21


22 Desvantagens do EKF Propriedades estatísticas do processo e dos ruídos das medidas Armazenar os passos anteriores para serem utiizados na nova estimativa de posição. Simpificações podem introduzir graus de iberdade no Fitro resutando em um aumento nas incertezas da posição do veícuo e das características extraídas. 22
23 Como fazer o Mapeamento? Mapeamento Métrico Estocástico Stochastic Map [Smith et a. 90] Usa o EKF para estimar as posições Vetor de estado representa as estimativas de posicionamento do veícuo e dos eementos Uma matriz covariância de erro associada, representa as incertezas destas estimativas Incui tanto as correações entre os estados do veícuo e cada features, como também as correações entre os eementos 23
24 Probema: Mapeamento Estocástico e EKF (N+3) 2 distribuições Gaussianas A dimensão da matriz cresce a cada novo eemento Row Data -> Features = , ), ( θ θ θ θ θ θ θ θ θ θ θ θ y x y y xy y y y x xy x x x x y x y x y x N t N N N N N N N N N N N y x m s b!!!! " " " " # " "!! " 24
25 Probema: Mapeamento Estocástico e EKF Conseqüências de Simpificações no EKF: Um número menor de eementos na matriz Ambientes compexos: aumento das incertezas de posição deformações rotações e/ou transações dos eementos do mapa As interdependências entre os eementos do mapa estão sendo desconsideradas 25
26 Impementação SmartROB-2, IfR-ETHZ Ambiente modeado em 2D - extração de features EKF simpificado Eementos cruzados Eementos da diagona principa Matching, fusão e atuaização no espaço (r-α) α {Ω} r {Ω} {Ω} r Linha Extraída Nova Linha Linha do Mapa 26 α r Linha Extraída Nova Linha Linha do Mapa α
27 Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada 27


28 Mapeamento 3D Aquisição de dados 28
 Grid 2D Baixo custo (aproximação) Bom para navegação Extração de Superfícies")
29 Mapeamento 3D Formas de representação típica: Coeção de todos os pontos medidos 200K pontos (pouco úti para navegação) Grid 3D Ata acurácia Dispendioso (proces- samento e memória) Grid 2D Baixo custo (aproximação) Bom para navegação Extração de Superfícies 29

30 Mapeamento 3D Atuaização de Mapas de Áreas Externas: 30


31 Mapeamento 3D Mapa Típico de Eevação: 31


32 Mapeamento 3D Mapa Eevação Pós-processado: 32


33 Mapeamento 3D Mapa com Mútipas Superfícies (MLS): 33
34 Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada 34
 XOberon tempo rea orientado a objeto Wireess Baterias 2 sensores Laser SICK LMS200 Motores Rack")
35 Impementação SmartROB-2, IfR-ETHZ Pataforma: SmartROB-2 0,60 x 0,35 x 0,40 m, 20 kg Acionamento diferencia 2 SICK LMS200 cobertura de 360 o resoução de 2 o erro radia < ± 20 mm (50 m) XOberon tempo rea orientado a objeto Wireess Baterias 2 sensores Laser SICK LMS200 Motores Rack 35

36 Mapeamento de Ambiente Estreitos Visuaização em 3D IfR ETH,


37 Mapeamento de Ambientes Largos Visuaização em 3D IfR ETH,



38 Mapeamento de Ambiente 3D Visuaização em 3D S.Thrun - CMU 38
39 Mapeamento de Ambiente 3D Visuaização em 3D S.Thrun - CMU 39

40 Mapeamento de Ambiente 3D Visuaização em 3D S.Thrun - CMU 40

41 Mapeamento de Ambiente 3D Visuaização em 3D CMU 41

42 Mapeamento de Ambiente 3D Visuaização em 3D CMU 42
43 Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada 43
44 Bibiografia Recomendada LIVROS SIEGWART, R. and NOURBAKHSH, I. Introduction to Autonomous Mobie Robots. MIT Press, MURPHY, R. R. Introduction to AI robotics. MIT Press, EVERRET, H. R. Sensors for mobie robots: theory and appication. A. K. Peters Ltd: Natick, Massachusetts, USA, BEKEY, G. A. Autonomous Robots: From bioogica inspiration to impementation and contro. MIT Press: Cambridge, Massachusetts, USA,
45 Bibiografia Recomendada LIVROS WILLIAMS, K. Insectronics: buid your own waking robot. McGrawHi: New York, BREAZEAL, C. L. Desinging sociaibe robots. MIT Press: Cambridge, Massachusets, KACHROO, P. and MELLODGE, P. Mobie robotic car design. McGrawHi: New York, DORIGO, M. and COLOMBETTI, M. Robot shaping. MIT Press: Cambridge, Massachusets,
46 Bibiografia Recomendada SITES
47 Bibiografia Recomendada SITES Bioogicay_Based/Bioogicay_Based_Index.htm
48 Bibiografia Recomendada SITES D_hopper.htm 48
49 Bibiografia Recomendada NOTAS DE AULA Siegwart, R. (ETHZ - Suíça): Simões, A. S. (UNESP - Brasi): Zufferey, J-C. (EPFL - Suíça): 49
Robôs para Inspeção. Tubulações. EESC-USP M. Becker /78
 Aplicações Robôs para Inspeção Tubulações EESC-USP M. Becker 2008 41/78 Aplicações Robôs para Indústrias - AGVs FLD 1604 AGV EESC-USP M. Becker 2008 42/78 Aplicações Robôs para Indústrias - AGVs FLD 1604
Aplicações Robôs para Inspeção Tubulações EESC-USP M. Becker 2008 41/78 Aplicações Robôs para Indústrias - AGVs FLD 1604 AGV EESC-USP M. Becker 2008 42/78 Aplicações Robôs para Indústrias - AGVs FLD 1604
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
26/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móve Inteigente: Da Simuação às Apicações no Mundo Rea Denis Fernando Wof Universidade de São Pauo USP - ICMC Eduardo do Vae Simões Grupo de Sist. Embarcados, Evoutivos e Robóticos Fernando Santos
Robótica Móve Inteigente: Da Simuação às Apicações no Mundo Rea Denis Fernando Wof Universidade de São Pauo USP - ICMC Eduardo do Vae Simões Grupo de Sist. Embarcados, Evoutivos e Robóticos Fernando Santos
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Odometria and Métodos de Dead-Reckoning Odometria permite boa
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Odometria and Métodos de Dead-Reckoning Odometria permite boa
SEM0 M Aul u a l a 14 Sistema de Múltiplos Corpos Sistema Pro r f. D r. r Ma M r a c r elo l Becker SEM - EESC - USP
 SEM4 - Aua 4 Sistema de Mútipos Corpos Prof. Dr. Marceo ecker SEM - EESC - USP Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações /67 ntrodução
SEM4 - Aua 4 Sistema de Mútipos Corpos Prof. Dr. Marceo ecker SEM - EESC - USP Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações /67 ntrodução
SLAM II Localização e Mapeamento Simulatâneos
 SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros Sistemas de Localização Bibliografia Recomendada
 Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aul u a l a 2 Robó b ti t c i a a Mó M vel Me M can a i n s i m s os s e L o L comoção ã Pro r f. D r. r Ma M r a c r elo l B ecker EESC - USP
 Aula 2 Robótica Móvel Mecanismos e Locomoção Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Atuadores Locomoção Exercícios Recomendados Bibliografia Recomendada EESC-USP M. Becker 2008
Aula 2 Robótica Móvel Mecanismos e Locomoção Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Atuadores Locomoção Exercícios Recomendados Bibliografia Recomendada EESC-USP M. Becker 2008
5 Estimação de Parâmetros utilizando o Algoritmo SAGE
 5 Estimação de Parâmetros utiizando o Agoritmo SAGE Recentemente, vários agoritmos de ata resoução tem sido usados para estimar os parâmetros do cana com objetivo de vaidar as modeagens espaço temporais.
5 Estimação de Parâmetros utiizando o Agoritmo SAGE Recentemente, vários agoritmos de ata resoução tem sido usados para estimar os parâmetros do cana com objetivo de vaidar as modeagens espaço temporais.
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
II. MODELAGEM MATEMÁTICA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
Breve resolução do e-fólio B
 ÁLGEBRA LINEAR I 22 Breve resoução do e-fóio B I. Questões de escoha mútipa. d), pois o vetor nuo pertence a quaquer subespaço, e a intersecção de 2 subespaços ainda é um subespaço. 2. c), os 3 vetores
ÁLGEBRA LINEAR I 22 Breve resoução do e-fóio B I. Questões de escoha mútipa. d), pois o vetor nuo pertence a quaquer subespaço, e a intersecção de 2 subespaços ainda é um subespaço. 2. c), os 3 vetores
II. MODELAGEM MATEMÁTICA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
Aula 3 Introdução à Robótica Móvel Cinemática. Laboratório de Robótica Móvel LabRoM. Prof. Dr. Marcelo Becker - SEM EESC USP
 Aula 3 Introdução à Robótica Móvel Cinemática Prof. Assoc. Marcelo Becker SEM - EESC - USP Laboratório de Robótica Móvel LabRoM Sumário da Aula Introdução Cinemática Manobrabilidade e Workspace Controle
Aula 3 Introdução à Robótica Móvel Cinemática Prof. Assoc. Marcelo Becker SEM - EESC - USP Laboratório de Robótica Móvel LabRoM Sumário da Aula Introdução Cinemática Manobrabilidade e Workspace Controle
Operando com potências
 A UA UL LA 71 Operando com potências Introdução Operações com potências são muito utiizadas em diversas áreas da Matemática, e em especia no cácuo agébrico O conhecimento das propriedades operatórias da
A UA UL LA 71 Operando com potências Introdução Operações com potências são muito utiizadas em diversas áreas da Matemática, e em especia no cácuo agébrico O conhecimento das propriedades operatórias da
Informá(ca para as Ciências e Engenharias Versão : C (Engenharia Civil) Aula 10. Pedro Barahona 2016 / 17
 Aula 10. Pedro Barahona 2016 / 17") Informá(ca para as Ciências e Engenharias Versão : C (Engenharia Civi) Aua 10 Pedro Barahona 2016 / 17 Sumário Introdução aos sistemas de bases de dados: Interrogações mais compexas em SQL. Simuação de
Informá(ca para as Ciências e Engenharias Versão : C (Engenharia Civi) Aua 10 Pedro Barahona 2016 / 17 Sumário Introdução aos sistemas de bases de dados: Interrogações mais compexas em SQL. Simuação de
Informática para Ciências e Engenharias (B) 2015/16. Teórica 3
 2015/16. Teórica 3") Informática para Ciências e Engenharias (B) 2015/16 Teórica 3 Na aua de hoje Cico for for end Vectores numéricos e strings sequências de números indexação de vectores Percursos em vectores Cico For Instrução
Informática para Ciências e Engenharias (B) 2015/16 Teórica 3 Na aua de hoje Cico for for end Vectores numéricos e strings sequências de números indexação de vectores Percursos em vectores Cico For Instrução
Triângulos especiais
 A UA UL LA Acesse: http://fuvestibuar.com.br/ Triânguos especiais Introdução Nesta aua, estudaremos o caso de dois triânguos muito especiais - o equiátero e o retânguo - seus ados, seus ânguos e suas razões
A UA UL LA Acesse: http://fuvestibuar.com.br/ Triânguos especiais Introdução Nesta aua, estudaremos o caso de dois triânguos muito especiais - o equiátero e o retânguo - seus ados, seus ânguos e suas razões
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
Operando com potências
 A UA UL LA Acesse: http://fuvestibuar.com.br/ Operando com potências Introdução Operações com potências são muito utiizadas em diversas áreas da Matemática, e em especia no cácuo agébrico. O conhecimento
A UA UL LA Acesse: http://fuvestibuar.com.br/ Operando com potências Introdução Operações com potências são muito utiizadas em diversas áreas da Matemática, e em especia no cácuo agébrico. O conhecimento
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Análise matricial de estruturas não-lineares usando o Método de Newton.
 Anáise matricia de estruturas não-ineares usando o Método de Newton. Exercício Computaciona - MAP3121 1 Primeiro probema 1.1 Descrição da estrutura não-inear Considere um sistema formado por três barras
Anáise matricia de estruturas não-ineares usando o Método de Newton. Exercício Computaciona - MAP3121 1 Primeiro probema 1.1 Descrição da estrutura não-inear Considere um sistema formado por três barras
A linguagem matemática
 A UUL AL A A inguagem matemática Observe o texto abaixo. Ee foi extraído de um ivro de geometria chinês. Veja se, mesmo sem saber chinês, você consegue entender o tema do texto, ou seja, sobre o que o
A UUL AL A A inguagem matemática Observe o texto abaixo. Ee foi extraído de um ivro de geometria chinês. Veja se, mesmo sem saber chinês, você consegue entender o tema do texto, ou seja, sobre o que o
Modelagem Matemática e Simulação Computacional da Dinâmica de um Robô SCARA
 Proceeding Series of the Braziian Society of Appied and omputationa Mathematics, Vo 4, N, 6 Trabaho apresentado no DINON, Nata - RN, 5 Proceeding Series of the Braziian Society of omputationa and Appied
Proceeding Series of the Braziian Society of Appied and omputationa Mathematics, Vo 4, N, 6 Trabaho apresentado no DINON, Nata - RN, 5 Proceeding Series of the Braziian Society of omputationa and Appied
Informática para as Ciências e Engenharias Versão : C (Engenharia Civil) Aula 10. Pedro Barahona 2018 / 19
 Aula 10. Pedro Barahona 2018 / 19") Informática para as Ciências e Engenharias Versão : C (Engenharia Civi) Aua 10 Pedro Barahona 2018 / 19 Sumário Introdução aos sistemas de bases de dados: Interrogações mais compexas emsql. Simuação de
Informática para as Ciências e Engenharias Versão : C (Engenharia Civi) Aua 10 Pedro Barahona 2018 / 19 Sumário Introdução aos sistemas de bases de dados: Interrogações mais compexas emsql. Simuação de
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
A linguagem matemática
 Acesse: http://fuvestibuar.com.br/ A UUL AL A A inguagem matemática Observe o texto abaixo. Ee foi extraído de um ivro de geometria chinês. Veja se, mesmo sem saber chinês, você consegue entender o tema
Acesse: http://fuvestibuar.com.br/ A UUL AL A A inguagem matemática Observe o texto abaixo. Ee foi extraído de um ivro de geometria chinês. Veja se, mesmo sem saber chinês, você consegue entender o tema
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
5.1. Simulações para o Campo Magnético Gerado por um Ímã Permanente.
 Simuações. No presente capítuo são apresentadas simuações referentes ao comportamento de parâmetros importantes para o desenvovimento do transdutor de pressão. As simuações foram eaboradas com o objetivo
Simuações. No presente capítuo são apresentadas simuações referentes ao comportamento de parâmetros importantes para o desenvovimento do transdutor de pressão. As simuações foram eaboradas com o objetivo
Informática para Ciências e Engenharias (B) 2016/17. Teórica 3
 2016/17. Teórica 3") Informática para Ciências e Engenharias (B) 2016/17 Teórica 3 Na aua de hoje Vetores. Cicos FOR. Percursos em vetores. Exempos 22 Março 2017 Vetores; cicos FOR 2 Probema dos Contaminantes Para avaiar a
Informática para Ciências e Engenharias (B) 2016/17 Teórica 3 Na aua de hoje Vetores. Cicos FOR. Percursos em vetores. Exempos 22 Março 2017 Vetores; cicos FOR 2 Probema dos Contaminantes Para avaiar a
Um dos conceitos mais utilizados em Matemática
 A UA UL LA A noção de função Introdução Um dos conceitos mais utiizados em Matemática é o de função. Ee se apica não somente a esta área, mas também à Física, à Química e à Bioogia, entre outras. Aém disso,
A UA UL LA A noção de função Introdução Um dos conceitos mais utiizados em Matemática é o de função. Ee se apica não somente a esta área, mas também à Física, à Química e à Bioogia, entre outras. Aém disso,
Sist. Lin. I. Sistemas Lineares Introdução Definições Geometria Resolução Equivalência Eliminação de Gauss Após Escalonamento. Sist. Lin.
 Motivação - 1 o Exempo 1 a Parte Pauo Godfed Marco Cabra Probema: há dois tipos de moeda, indistinguíveis exceto peo peso As de materia X pesam 10 g cada e as de materia Y, 0 g cada Se um conjunto de 100
Motivação - 1 o Exempo 1 a Parte Pauo Godfed Marco Cabra Probema: há dois tipos de moeda, indistinguíveis exceto peo peso As de materia X pesam 10 g cada e as de materia Y, 0 g cada Se um conjunto de 100
Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada. EESC-USP M. Becker /78
 Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Projeção ortográfica de sólidos geométricos
 Projeção ortográfica de sóidos geométricos Na aua anterior você ficou sabendo que a projeção ortográfica de um modeo em um único pano agumas vezes não representa o modeo ou partes dee em verdadeira grandeza.
Projeção ortográfica de sóidos geométricos Na aua anterior você ficou sabendo que a projeção ortográfica de um modeo em um único pano agumas vezes não representa o modeo ou partes dee em verdadeira grandeza.
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
SEM Aula 2 Graus de Liberdade e Cadeias Cinemáticas. Prof. Assoc. Marcelo Becker
 SEM0104 - Aula 2 Graus de Liberdade e Cadeias Cinemáticas Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM0104 - Aula 2 Graus de Liberdade e Cadeias Cinemáticas Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
Emerson Marcos Furtado
 Emerson Marcos Furtado Mestre em Métodos Numéricos pea Universidade Federa do Paraná (UFPR). Graduado em Matemática pea UFPR. Professor do Ensino Médio nos estados do Paraná e Santa Catarina desde 199.
Emerson Marcos Furtado Mestre em Métodos Numéricos pea Universidade Federa do Paraná (UFPR). Graduado em Matemática pea UFPR. Professor do Ensino Médio nos estados do Paraná e Santa Catarina desde 199.
Informática para Ciências e Engenharias (B) 2015/16. Teórica 11
 2015/16. Teórica 11") Informática para Ciências e Engenharias (B) 2015/16 Teórica 11 Na aua de hoje Sistemas de bases de dados: Interrogações mais compexas em SQL Envovendo várias tabeas Simuação de modeos contínuos: Integração
Informática para Ciências e Engenharias (B) 2015/16 Teórica 11 Na aua de hoje Sistemas de bases de dados: Interrogações mais compexas em SQL Envovendo várias tabeas Simuação de modeos contínuos: Integração
PROGRAMAÇÃO ORIENTADA A OBJETOS: Introdução
 PROGRAMAÇÃO ORIENTADA A OBJETOS: Introdução Um pouco de História Primeiras Máquinas de Cacuar Ábaco há aproximadamente 4.000 a.c. Um pouco de História Primeiras Máquinas de Cacuar PASCALINA ano de 1642(Baise
PROGRAMAÇÃO ORIENTADA A OBJETOS: Introdução Um pouco de História Primeiras Máquinas de Cacuar Ábaco há aproximadamente 4.000 a.c. Um pouco de História Primeiras Máquinas de Cacuar PASCALINA ano de 1642(Baise
PROJETO CONCEITUAL DE ROBÔ COM CAPACIDADE DE RECOLHER LATAS EM AMBIENTE SIMULANDO UMA PRAIA
 PROJETO CONCEITUAL DE ROBÔ COM CAPACIDADE DE RECOLHER LATAS EM AMBIENTE SIMULANDO UMA PRAIA Michael Furlanetti, John Archila, Eduardo Cazarini, Luis Tobler Garcia, Rodolfo Fernandes e Marcelo Becker USP,
PROJETO CONCEITUAL DE ROBÔ COM CAPACIDADE DE RECOLHER LATAS EM AMBIENTE SIMULANDO UMA PRAIA Michael Furlanetti, John Archila, Eduardo Cazarini, Luis Tobler Garcia, Rodolfo Fernandes e Marcelo Becker USP,
Andson M. Balieiro, Kelvin L. Dias {amb4,
 Mapeamento de Redes Virtuais Secundárias em Substrato Sem Fio Baseado em Rádio Cognitivo: Formuação Mutiobjetivo e Anáise Andson M. Baieiro, Kevin L. Dias {amb4, kd}@cin.ufpe.br Agenda Motivação e Cenário
Mapeamento de Redes Virtuais Secundárias em Substrato Sem Fio Baseado em Rádio Cognitivo: Formuação Mutiobjetivo e Anáise Andson M. Baieiro, Kevin L. Dias {amb4, kd}@cin.ufpe.br Agenda Motivação e Cenário
4 DEFINIÇÃO DA GEOMETRIA, MALHA E PARÂMETROS DA SIMULAÇÃO
 4 DEFINIÇÃO DA GEOETRIA, ALHA E PARÂETROS DA SIULAÇÃO 4.1 Fornaha experimenta A fornaha experimenta utiizada como caso teste por Garreton (1994), era de 400kW aimentada com gás natura. Deste trabaho, estão
4 DEFINIÇÃO DA GEOETRIA, ALHA E PARÂETROS DA SIULAÇÃO 4.1 Fornaha experimenta A fornaha experimenta utiizada como caso teste por Garreton (1994), era de 400kW aimentada com gás natura. Deste trabaho, estão
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA
 ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
Por que o alumínio compete com o aço?
 Por que o aumínio compete com o aço? AUUL AL A Sobre carbono Extração do aumínio da bauxita Recicagem do aumínio As propriedades do aumínio Por que o aumínio não enferruja O que você vai aprender O que
Por que o aumínio compete com o aço? AUUL AL A Sobre carbono Extração do aumínio da bauxita Recicagem do aumínio As propriedades do aumínio Por que o aumínio não enferruja O que você vai aprender O que
ESTUDO DA EQUAÇÃO DE DEFASAGEM
 Anais do 1 O Encontro de Iniciação Científica e Pós-Graduação do ITA XII ENCITA / 006 Instituto Tecnoógico de Aeronáutica São José dos Campos SP Brasi Outubro 16 a 19 006 Ricardo Affonso do Rego Ita Departamento
Anais do 1 O Encontro de Iniciação Científica e Pós-Graduação do ITA XII ENCITA / 006 Instituto Tecnoógico de Aeronáutica São José dos Campos SP Brasi Outubro 16 a 19 006 Ricardo Affonso do Rego Ita Departamento
Método dos Deslocamentos
 Método dos Desocamentos formuação matemática do método das forças e dos desocamentos é bastante semehante, devendo a escoha do método de anáise incidir num ou noutro conforme seja mais vantajoso O método
Método dos Desocamentos formuação matemática do método das forças e dos desocamentos é bastante semehante, devendo a escoha do método de anáise incidir num ou noutro conforme seja mais vantajoso O método
Fernando Fonseca Andrade Oliveira
 FIS-6 Lista-1 Correção Fernando Fonseca Andrade Oiveira 1. (a) Como a partícua se move sob a ação de força centra, seu momento anguar deve se conservar durante o movimento. Assim, considerando somente
FIS-6 Lista-1 Correção Fernando Fonseca Andrade Oiveira 1. (a) Como a partícua se move sob a ação de força centra, seu momento anguar deve se conservar durante o movimento. Assim, considerando somente
Informática para Ciências e Engenharias (B) 2015/16. Teórica 6
 2015/16. Teórica 6") Informática para Ciências e Engenharias (B) 2015/16 Teórica 6 Na aua de hoje Representação de imagens pixes, sistema RGB Gráficos em MATLAB Gráficos simpes Imagens 2D Exempo: difusão Gráficos 3D Exempo:
Informática para Ciências e Engenharias (B) 2015/16 Teórica 6 Na aua de hoje Representação de imagens pixes, sistema RGB Gráficos em MATLAB Gráficos simpes Imagens 2D Exempo: difusão Gráficos 3D Exempo:
A própria caracterização geométrica da superfície topográfica, dada pela altitude, é definida rigorosamente a partir da superfície do geóide;
 1. Geóide a definição da Forma da Terra recorre-se a dois conceitos: o da superfície topográfica (superfície sóida da Terra) e o da superfície do geóide (superfície equipotencia de referência); Dada as
1. Geóide a definição da Forma da Terra recorre-se a dois conceitos: o da superfície topográfica (superfície sóida da Terra) e o da superfície do geóide (superfície equipotencia de referência); Dada as
e rápido para estimar a potência. do rotor (i.e. seleccionar a sua área) para um
 para um") A teoria do momento inear é um método simpes e rápido para estimar a potência. Este método é suficiente para projectar o tamanho do rotor (i.e. seeccionar a sua área) para um determinado motor e para um
A teoria do momento inear é um método simpes e rápido para estimar a potência. Este método é suficiente para projectar o tamanho do rotor (i.e. seeccionar a sua área) para um determinado motor e para um
Plantas e mapas. Na Aula 17, aprendemos o conceito de semelhança
 A UA UL LA Pantas e mapas Introdução Na Aua 7, aprendemos o conceito de semehança de triânguos e vimos, na Aua 0, interessantes apicações desse conceito no cácuo de distâncias difíceis de serem medidas
A UA UL LA Pantas e mapas Introdução Na Aua 7, aprendemos o conceito de semehança de triânguos e vimos, na Aua 0, interessantes apicações desse conceito no cácuo de distâncias difíceis de serem medidas
Recordando operações
 A UA UL LA Recordando operações Introdução Vamos iniciar nosso curso de matemática do 2º grau recordando as quatro operações: adição subtração mutipicação divisão Vamos embrar como essas operações são
A UA UL LA Recordando operações Introdução Vamos iniciar nosso curso de matemática do 2º grau recordando as quatro operações: adição subtração mutipicação divisão Vamos embrar como essas operações são
MP-208: Filtragem Ótima com Aplicações Aeroespaciais
 MP-208: Filtragem Ótima com Aplicações Aeroespaciais Capítulo 7: Filtro de Kalman Estendido Discreto Davi Antônio dos Santos Departamento de Mecatrônica Instituto Tecnológico de Aeronáutica davists@ita.br
MP-208: Filtragem Ótima com Aplicações Aeroespaciais Capítulo 7: Filtro de Kalman Estendido Discreto Davi Antônio dos Santos Departamento de Mecatrônica Instituto Tecnológico de Aeronáutica davists@ita.br
15/05/2013. Localização I. Localização. Localização: classificação. Localização: classificação. Tipo de ambiente. Ambiente dinâmico - soluções
 SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
Máquinas simples. Ao longo de sua história, o ser humano A U L A
 Máquinas simpes Ao ongo de sua história, o ser humano procurou mehorar suas condições de trabaho, principamente no que se refere à redução de seu esforço físico. ara isso, o homem utiizou, iniciamente,
Máquinas simpes Ao ongo de sua história, o ser humano procurou mehorar suas condições de trabaho, principamente no que se refere à redução de seu esforço físico. ara isso, o homem utiizou, iniciamente,
Informática para Ciências e Engenharias (B) 2015/16. Teórica 5
 2015/16. Teórica 5") Informática para Ciências e Engenharias (B) 2015/16 Teórica 5 Na aua de hoje Controo de execução cicos condicionais whie end Exempos raiz quadrada whie Histograma whie e matrizes fórmua química whie e
Informática para Ciências e Engenharias (B) 2015/16 Teórica 5 Na aua de hoje Controo de execução cicos condicionais whie end Exempos raiz quadrada whie Histograma whie e matrizes fórmua química whie e
Algoritmos de conformação de feixe em banda dupla para aplicação em bloqueio de RF
 XXV SIMPÓSIO BRASILEIRO DE TELECOMUNICAÇÕES - SBrT 07, 03-06 DE SETEMBRO DE 007, RECIFE, PE Agoritmos de conformação de feixe em banda dupa para apicação em boqueio de RF Danie Siva Vieira Araujo, José
XXV SIMPÓSIO BRASILEIRO DE TELECOMUNICAÇÕES - SBrT 07, 03-06 DE SETEMBRO DE 007, RECIFE, PE Agoritmos de conformação de feixe em banda dupa para apicação em boqueio de RF Danie Siva Vieira Araujo, José
Banco de Dados I Introdução. Prof. Dr. Joel da Silva
 Banco de Dados I Introdução Prof. Dr. Joe da Siva Apresentação: Quem sou? Joe da Siva (joe.dasiva@iffarroupiha.edu.br) Formação: Graduação Informática (URI/FW) - 2001 Mestre em Ciência da Computação (CIn/UFPE)
Banco de Dados I Introdução Prof. Dr. Joe da Siva Apresentação: Quem sou? Joe da Siva (joe.dasiva@iffarroupiha.edu.br) Formação: Graduação Informática (URI/FW) - 2001 Mestre em Ciência da Computação (CIn/UFPE)
Gestão do Ciclo de Vida do Produto Integrada com as Core Tools
 Benefícios e Vantagens Ficha Técnica Gestão do Cico de Vida do Produto Integrada com as Core Toos O ISOQuaitas.PLM é um software abrangente que integra todas as atividades da Gestão do Cico de Vida do
Benefícios e Vantagens Ficha Técnica Gestão do Cico de Vida do Produto Integrada com as Core Toos O ISOQuaitas.PLM é um software abrangente que integra todas as atividades da Gestão do Cico de Vida do
Recordando operações
 A UA UL LA Acesse: http://fuvestibuar.com.br/ Recordando operações Introdução Vamos iniciar nosso curso de matemática do 2º grau recordando as quatro operações: adição subtração mutipicação divisão Vamos
A UA UL LA Acesse: http://fuvestibuar.com.br/ Recordando operações Introdução Vamos iniciar nosso curso de matemática do 2º grau recordando as quatro operações: adição subtração mutipicação divisão Vamos
O que acontece quando uma substância se transforma?
 O que acontece quando uma substância se transforma? A UU L AL A O que acontece numa reação química O que são reagentes e produtos O que significa reagir pásticos fibras sintéticas (cordas, tecidos etc.)
O que acontece quando uma substância se transforma? A UU L AL A O que acontece numa reação química O que são reagentes e produtos O que significa reagir pásticos fibras sintéticas (cordas, tecidos etc.)
SEM Aula 5 Cálculo da Velocidade: Velocidade Relativa. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 5 Cálculo da Velocidade: Velocidade Relativa Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da Aula Método Gráfico Análise de Mecanismos Cálculo de Velocidade Velocidade Relativa Definição
SEM0104 - Aula 5 Cálculo da Velocidade: Velocidade Relativa Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da Aula Método Gráfico Análise de Mecanismos Cálculo de Velocidade Velocidade Relativa Definição
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
RAZÕES TRIGONOMÉTRICAS NO TRIÂNGULO RETÂNGULO
 FORMAÇÃO CONTINUADA EM MATEMÁTICA FUNDAÇÃO CECIERJ/ Consórcio CEDERJ Matemática 1º ano º Bimestre/ 01 Pano de Trabaho RAZÕES TRIGONOMÉTRICAS NO TRIÂNGULO RETÂNGULO Acesso em /05/01 educador.brasiescoa.com
FORMAÇÃO CONTINUADA EM MATEMÁTICA FUNDAÇÃO CECIERJ/ Consórcio CEDERJ Matemática 1º ano º Bimestre/ 01 Pano de Trabaho RAZÕES TRIGONOMÉTRICAS NO TRIÂNGULO RETÂNGULO Acesso em /05/01 educador.brasiescoa.com
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 18 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Planejamento de Caminhos O problema de planejamento de caminhos
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 18 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Planejamento de Caminhos O problema de planejamento de caminhos
Podemos utilizar o cálculo do determinante para nos auxiliar a encontrar a inversa de uma matriz, como veremos à seguir.
 O cácuo da inversa de uma matriz quadrada ou trianguar é importante para ajudar a soucionar uma série probemas, por exempo, a computação gráfica, na resoução de probemas de posicionamento de juntas articuadas
O cácuo da inversa de uma matriz quadrada ou trianguar é importante para ajudar a soucionar uma série probemas, por exempo, a computação gráfica, na resoução de probemas de posicionamento de juntas articuadas
Wireless LANs - Extens
 Wireess LANs - Extens QoS - Sumário Enquadramento Limitaçõ ções do 802.11 Anáise de souçõ ções A norma 802.11e Souçõ ções em 802.11b ção o MóveM 5.3.1 Wireess LANs - Extens QoS - Enquadramento Como suportar
Wireess LANs - Extens QoS - Sumário Enquadramento Limitaçõ ções do 802.11 Anáise de souçõ ções A norma 802.11e Souçõ ções em 802.11b ção o MóveM 5.3.1 Wireess LANs - Extens QoS - Enquadramento Como suportar
Improvement of a Robotic Soccer Team Using a Multilayered Control Architecture
 Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio, Rodofo V. Vaentim Universidade Federa do Espírito Santo Abstract Very Sma Size Soccer
Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio, Rodofo V. Vaentim Universidade Federa do Espírito Santo Abstract Very Sma Size Soccer
GRUPO X GRUPO DE ESTUDO DE SOBRETENSÕES E COORDENAÇÃO DE ISOLAMENTO - GSC
 SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GSC - 1 16 a 1 Outubro de 005 Curitiba - Paraná GRUPO X GRUPO DE ESTUDO DE SORETENSÕES E COORDENAÇÃO DE ISOLAMENTO - GSC DESENVOLVIMENTO
SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GSC - 1 16 a 1 Outubro de 005 Curitiba - Paraná GRUPO X GRUPO DE ESTUDO DE SORETENSÕES E COORDENAÇÃO DE ISOLAMENTO - GSC DESENVOLVIMENTO
Máquinas simples. Ao longo de sua história, o ser humano. por sua simplicidade, ficaram conhecidos como máquinas simples. alavanca.
 A U A UL LA Acesse: http://fuvestibuar.com.br/ Máquinas simpes Ao ongo de sua história, o ser humano procurou mehorar suas condições de trabaho, principamente no que se refere à redução de seu esforço
A U A UL LA Acesse: http://fuvestibuar.com.br/ Máquinas simpes Ao ongo de sua história, o ser humano procurou mehorar suas condições de trabaho, principamente no que se refere à redução de seu esforço
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Camada de Transporte
 Camada de Transporte Protocoos UDP e TCP Internetworking with TCP/IP D. Comer Mário Meirees Teixeira. UFMA-DEINF Protocoo UDP Protocoo de transporte não orientado a conexão Funciona sobre o serviço de
Camada de Transporte Protocoos UDP e TCP Internetworking with TCP/IP D. Comer Mário Meirees Teixeira. UFMA-DEINF Protocoo UDP Protocoo de transporte não orientado a conexão Funciona sobre o serviço de
Ácido sulfúrico na estrela-d alva?
 Ácido sufúrico na estrea-d ava? O que você vai aprender Existe ácido sufúrico na atmosfera de aguns panetas Existe um satéite de Júpiter que tem muito enxofre Onde existe enxofre na Terra Produção de ácido
Ácido sufúrico na estrea-d ava? O que você vai aprender Existe ácido sufúrico na atmosfera de aguns panetas Existe um satéite de Júpiter que tem muito enxofre Onde existe enxofre na Terra Produção de ácido
AMOSTRAGEM. Para estudar estas variabilidades utilizam-se técnicas geoestatísticas.
 CURSO BÁSICO DE GEOESTATÍSTICA COM O USO DO GS + E CONFECÇÃO DE MAPAS DE KRIGAGEM UTILIZANDO O SURFER Engenheiro Agrônomo Rafae Montanari AMOSTRAGEM EXEMPLO: A AMOSTRAGEM DE SOLO PARA DETECTAR UMA VARIABILIDADE
CURSO BÁSICO DE GEOESTATÍSTICA COM O USO DO GS + E CONFECÇÃO DE MAPAS DE KRIGAGEM UTILIZANDO O SURFER Engenheiro Agrônomo Rafae Montanari AMOSTRAGEM EXEMPLO: A AMOSTRAGEM DE SOLO PARA DETECTAR UMA VARIABILIDADE
MÉTODOS BÁSICOS DA ANÁLISE DE ESTRUTURAS
 MÉTODOS BÁSICOS DA ANÁLISE DE ESTRUTURAS Luiz Fernando Martha Pontifícia Universidade Catóica do Rio de Janeiro PUC-Rio Departamento de Engenharia Civi Rua Marquês de São Vicente, 5 - Gávea CEP 45-9 Rio
MÉTODOS BÁSICOS DA ANÁLISE DE ESTRUTURAS Luiz Fernando Martha Pontifícia Universidade Catóica do Rio de Janeiro PUC-Rio Departamento de Engenharia Civi Rua Marquês de São Vicente, 5 - Gávea CEP 45-9 Rio
Implementação do Filtro de Kalman Estendido
 UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
Calculando áreas. Após terem sido furadas, qual delas possui maior área?
 A UA UL LA 53 5 Cacuando áreas Para pensar Imagine que você vá revestir o piso de sua saa com ajotas. Para saber a quantidade de ajotas necessária, o que é preciso conhecer: a área ou o perímetro da saa?
A UA UL LA 53 5 Cacuando áreas Para pensar Imagine que você vá revestir o piso de sua saa com ajotas. Para saber a quantidade de ajotas necessária, o que é preciso conhecer: a área ou o perímetro da saa?
Manufatura assistida por computador
 Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Detecção de Clusters Espaciais Em Modelos de Regressão Poisson Duplo com Inflação de Zeros
 Detecção de Custers Espaciais Em Modeos de Regressão Poisson Dupo com Infação de Zeros José Cardoso Neto a, Luiz H. Duczma b, Max S. de Lima a and Letícia P. Pinto b a Universidade Federa do Amazonas,
Detecção de Custers Espaciais Em Modeos de Regressão Poisson Dupo com Infação de Zeros José Cardoso Neto a, Luiz H. Duczma b, Max S. de Lima a and Letícia P. Pinto b a Universidade Federa do Amazonas,
Vamos entender a reação química com átomos e moléculas
 Acesse: http://fuvestibuar.com.br/ Vamos entender a reação química com átomos e moécuas O que você vai aprender Escrever uma reação química com fórmuas Estequiometria da reação Seria bom já saber O que
Acesse: http://fuvestibuar.com.br/ Vamos entender a reação química com átomos e moécuas O que você vai aprender Escrever uma reação química com fórmuas Estequiometria da reação Seria bom já saber O que
Introdução. Introdução Exemplo. Introdução. Representação do Ambiente Exemplo. Representação do Ambiente. Mapeamento e Localização Simultâneos
 Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
EAE36AM - ESTATÍSTICA APLICADA A EXPERIMENTOS
 EAE36AM - ESTATÍSTICA APLICADA A EXPERIMENTOS AULA 1 PROFª SHEILA REGINA ORO Ementa Panejamento de experimentos; Panejamento amostra; Deineamento experimenta; Coeta e vaidação dos dados; Testes de comparação
EAE36AM - ESTATÍSTICA APLICADA A EXPERIMENTOS AULA 1 PROFª SHEILA REGINA ORO Ementa Panejamento de experimentos; Panejamento amostra; Deineamento experimenta; Coeta e vaidação dos dados; Testes de comparação
Calculando áreas. Após terem sido furadas, qual delas possui maior área?
 A UA UL LA Cacuando áreas Para pensar Imagine que você vá revestir o piso de sua saa com ajotas. Para saber a quantidade de ajotas necessária, o que é preciso conhecer: a área ou o perímetro da saa? Foram
A UA UL LA Cacuando áreas Para pensar Imagine que você vá revestir o piso de sua saa com ajotas. Para saber a quantidade de ajotas necessária, o que é preciso conhecer: a área ou o perímetro da saa? Foram
Improvement of a Robotic Soccer Team Using a Multilayered Control Architecture
 Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio and Rodofo V. Vaentim 3 Abstract Very Sma Size Soccer is an important category of Latin
Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio and Rodofo V. Vaentim 3 Abstract Very Sma Size Soccer is an important category of Latin
O círculo e o número p
 A UA UL LA 45 O círcuo e o número p Para pensar O círcuo é uma figura geométrica bastante comum em nosso dia-a-dia. Observe à sua vota quantos objetos circuares estão presentes: nas moedas, nos discos,
A UA UL LA 45 O círcuo e o número p Para pensar O círcuo é uma figura geométrica bastante comum em nosso dia-a-dia. Observe à sua vota quantos objetos circuares estão presentes: nas moedas, nos discos,
MOVIMENTO DE ROTAÇÃO: O ROTOR RÍGIDO
 MOVIMENTO DE ROTAÇÃO: O ROTOR RÍGIDO Prof. Harey P. Martins Fiho o Rotação em duas dimensões Partícua de massa m descrevendo trajetória circuar no pano xy: Momento anguar da partícua: J z = rp = mrv Ser
MOVIMENTO DE ROTAÇÃO: O ROTOR RÍGIDO Prof. Harey P. Martins Fiho o Rotação em duas dimensões Partícua de massa m descrevendo trajetória circuar no pano xy: Momento anguar da partícua: J z = rp = mrv Ser
RESUMO TÉCNICO DA CONCESSÃO DE BENEFÍCIO DO PCD
 RESUMO TÉCNICO DA CONCESSÃO DE BENEFÍCIO DO PCD INTRODUÇÃO O Pano de Contribuição Definida é aquee em que os benefícios são obtidos a partir da capitaização das contribuições efetuadas em nome do participante,
RESUMO TÉCNICO DA CONCESSÃO DE BENEFÍCIO DO PCD INTRODUÇÃO O Pano de Contribuição Definida é aquee em que os benefícios são obtidos a partir da capitaização das contribuições efetuadas em nome do participante,
A Análise de Causa Raiz pode ser uma das ferramentas mais importantes que sua organização pode ter nas mãos.
 Av. São Francisco, 65 cj. 51 Centro Santos SP te. 13 3219-2167 Aumente seu orçamento utiizando a ACR Por Chris Eckert, P.E., CMRP, Presidente da Soogic Uma versão deste artigo foi pubicada na edição de
Av. São Francisco, 65 cj. 51 Centro Santos SP te. 13 3219-2167 Aumente seu orçamento utiizando a ACR Por Chris Eckert, P.E., CMRP, Presidente da Soogic Uma versão deste artigo foi pubicada na edição de
Localização. Localização
 Localização Construção de Mapas Localização posição do robô features Extração de Informação ação Planejamento da Missão trajetória Percepção Controle de Trajetória velocidades dados brutos Sensoriamento
Localização Construção de Mapas Localização posição do robô features Extração de Informação ação Planejamento da Missão trajetória Percepção Controle de Trajetória velocidades dados brutos Sensoriamento
SISTEMAS ROBÓTICOS AUTÓNOMOS
 SISTEMAS ROBÓTICOS AUTÓNOMOS Mestrado Integrado em Engenharia Eletrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto A. Paulo G. M. Moreira Pag. 1 SISTEMAS ROBÓTICOS AUTÓNOMOS
SISTEMAS ROBÓTICOS AUTÓNOMOS Mestrado Integrado em Engenharia Eletrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto A. Paulo G. M. Moreira Pag. 1 SISTEMAS ROBÓTICOS AUTÓNOMOS
Transdutores capacitivos e indutivos. Prof. Valner Brusamarello
 Transdutores capacitivos e indutivos Prof. Vaner Brusamareo Transdutores apacitivos Fornecem uma ateração da capacitância em resposta ao estímuo Ateração da distância, área ou dieétrico das pacas apacitor
Transdutores capacitivos e indutivos Prof. Vaner Brusamareo Transdutores apacitivos Fornecem uma ateração da capacitância em resposta ao estímuo Ateração da distância, área ou dieétrico das pacas apacitor
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Redes Neurais e Sistemas Fuzzy
 Redes Neurais e Sistemas Fuzzy O ADALINE e o algoritmo LMS O ADALINE No contexto de classificação, o ADALINE [B. Widrow 1960] pode ser visto como um perceptron com algoritmo de treinamento baseado em minimização
Redes Neurais e Sistemas Fuzzy O ADALINE e o algoritmo LMS O ADALINE No contexto de classificação, o ADALINE [B. Widrow 1960] pode ser visto como um perceptron com algoritmo de treinamento baseado em minimização
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM