Disciplina de Robôs Móveis Autônomos SSC-5888
|
|
|
- Elza Molinari de Vieira
- 5 Há anos
- Visualizações:
Transcrição
1 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório fosorio [at] { icmc. usp. br, gmail. com } Web: 1 Aula 02 Aula 02: Auto-Localização em RMAs Agenda: 2 Auto-Localização 1. Conceitos: Posição e Orientação no Ambiente 2. Estimativa de Posição/Orientação: Pose Maintenance Sensores e Medidas: Encoders, Bússola, GPS, Tracking (externo) Dead Reckoning: deslocamento relativo (odômetro) Imprecisão da Estimativa de Posição/Orientaçao 3. Marcadores de Posição: Pontos e Sinais de Referência: Landmarks, Beacons Triangulação, Correlação e Servo-Controle, Localização Topológica 4. Localização baseada no Filtro de Kalman Localização baseada em Modelos de Markov Localização baseada em Técnicas de Monto Carlo 1

 Orientação em 3D (θx, θy, θz) 4 Posição X, Y Orientação θ Importância: MAPAS - Onde estou? - Para onde vou?")
2 Auto-Localização: Conceitos Conceitos: Posição e Orientação do RMA no Ambiente Deslocamento do Robô: Estimativa de Posição Pose maintenance Pose 2D: Sequência Posição no Plano X, Y Ângulo de Orientação Pose 3D: Posição no Espaço X, Y, Z (altura) Orientação em 3D (θx, θy, θz) 3 Posição X, Y Orientação θ Importância: - Onde estou? - Para onde vou? Auto-Localização: Conceitos Conceitos: Posição e Orientação do RMA no Ambiente Deslocamento do Robô: Estimativa de Posição Pose maintenance Pose 2D: Sequência Posição no Plano X, Y Ângulo de Orientação Pose 3D: Posição no Espaço X, Y, Z (altura) Orientação em 3D (θx, θy, θz) 4 Posição X, Y Orientação θ Importância: MAPAS - Onde estou? - Para onde vou? > Interpretação do AMBIENTE 2



 5 Importância: MAPAS -")


 ERRO DE ESTIMATIVA")

3 Localização: Conceitos Conceitos: Posição e Orientação do RMA no Ambiente Deslocamento do Robô: Estimativa de Posição Pose maintenance Pose 2D: Sequência Posição no Plano X, Y Ângulo de Orientação Pose 3D: Posição no Espaço X, Y, Z (altura) Orientação em 3D (θx, θy, θz) 5 Importância: MAPAS - Onde estou? - Para onde vou? > Interpretação do AMBIENTE Localização: Estimativa Estimativa de Posição e Orientação Sensores e Medidas - Encoders - Compass (bússola) - GPS - Tracking (externo) ERRO DE ESTIMATIVA ENCODER: Registra o giro da roda. Permite estimar o deslocamento do robô > Odômetro [Medida Relativa de Deslocamento] 6 3


 ERRO DE")


![de Orientação] 7](/docs-images/93/112100820/images/4-5.jpg "ESTIMATIVA GPS: Posição")



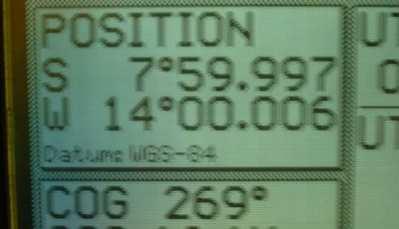
4 Localização: Estimativa Estimativa de Posição e Orientação Sensores e Medidas - Encoders - Compass (bússola) - GPS - Tracking (externo) ERRO DE ESTIMATIVA COMPASS: Orientação do robô em relação ao norte magnético > Bussola [Medida Absoluta de Orientação] 7 Localização: Estimativa Estimativa de Posição e Orientação Sensores e Medidas - Encoders - Compass (bússola) - GPS - Tracking (externo) ERRO DE ESTIMATIVA GPS: Posição (3D) e Orientação do robô com estimativa de velocidade de desloc. [Medida Absoluta de Posição, Altura e Orientação] 8 4
 Estimativa de posição e orientação [Medida Absoluta de Posição e Orientação] 9 Localização:")


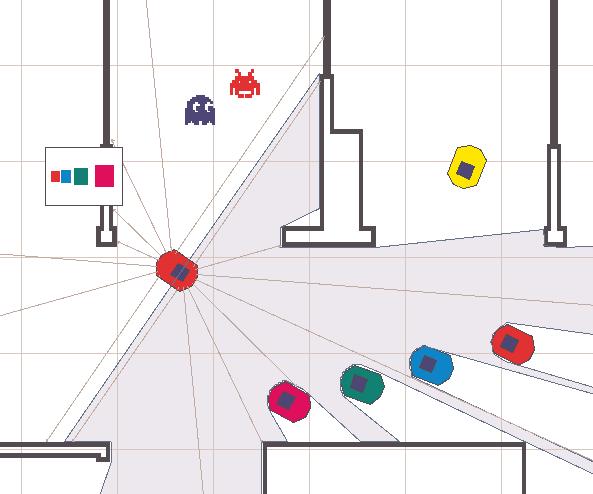
5 Localização: Estimativa Estimativa de Posição e Orientação Sensores e Medidas - Encoders - Compass (bússola) - GPS - Tracking (externo) ERRO DE ESTIMATIVA Tracking Externo: Usando Câmera (top view) Estimativa de posição e orientação [Medida Absoluta de Posição e Orientação] 9 Localização: Estimativa Dead Reckoning: Estimativa do deslocamento relativo Implementando um Odômetro: Através do acompanhamento dos comandos de avanço e giro, podemos estimar a posição do robô. Além disto, também é possível usar as informações provenientes de sensores como os encoders das rodas para estimar a posição. ERRO DE ESTIMATIVA Dead Reckoning: Localização baseada em odometria, onde estimamos a posição e orientação do robô através da integração no tempo dos diversos deslocamentos e rotações realizados pelo robô. Rotacionar N graus - Avancar durante X seg - Rotacionar para esquerda durante X seg 10 5

6 Localização: Estimativa e Erro Dead Reckoning: ERRO de Estimativa do deslocamento 11 Localização: Marcadores de Posição Marcadores de Posição: Pontos e Sinais de Referência LandMarks: Pontos de Referência Podemos inserir no ambiente marcações passivas que permitam que o robô determine sua posição aproximada. Beacons: Sinais de Referência ou faróis Podemos inserir no ambiente marcações ativas que permitam que o robô determine sua posição aproximada. 12 Borenstein 1996 Borenstein



7 Localização: Marcadores de Posição Marcadores de Posição: Triangulação Os métodos de triangulação para a localização de robôs móveis se baseiam nos métodos tradicionais da cartografia e navegação, que utilizam os ângulos observados entre pontos de referência do ambiente para calcular a posição relativa do observador. Fica claro que com apenas o ângulo entre 2 pontos de referência, a posição do observador é delimitada pelo arco de um círculo. No caso com 3 pontos de referência, a localização do observador se encontra em um único ponto, que é a intersecção entre dois círculos, desde que os pontos de referência não sejam coincidentes. Ângulo: 2, 3 ou mais marcas Distância das Marcações 13 Localização: Marcadores de Posição Marcadores de Posição: Servo-Motor / Visual Jung 2004,






8 Localização: Marcadores de Posição Marcadores de Posição: Servo-Motor / Visual / Marcações 15 Kelber 2004, 2005 Localização: Marcadores de Posição Marcadores de Posição: Localização Topológica - Identificando: Corredores, Cruzamentos e Portas MAPAS Mapa Topológico: Identifica as regiões do mapa e sua conectividade. 16 8
9 17 Localização baseada no Filtro de Kalman Este método aplica uma técnica de filtragem usando o filtro de Kalman para, uma vez conhecida a localização corrente aproximada do robô, estimar a sua próxima localização, considerando seu deslocamento e usando as informações imprecisas obtidas pelos seus sensores Localização: Posição Estimada + Dead-Reackoning + Sensorial The Prediction-Correction-Cycle STATE + ACTION Prediction Correction 18 PERCEPTION 9
10 Discrete Kalman Filter Estimates the state x of a discrete-time controlled process that is governed by the linear stochastic difference equation x t = At xt 1 + B u t t + ε t with a measurement z t = C t x t + δ t 19 Components of a Kalman Filter A t Matrix (nxn) that describes how the state evolves from t to t-1 without controls or noise. 20 B t C t ε t δ t Matrix (nxl) that describes how the control u t changes the state from t to t-1. Matrix (kxn) that describes how to map the state x t to an observation z t. Random variables representing the process and measurement noise that are assumed to be independent and normally distributed with covariance R t and Q t respectively. 10

11 Localização baseada em Modelos de Markov * Concept to compute a probability distribution over all possible locations in a particular environment * Addresses the problem of state estimation from sensor data * Can be used to solve the localization problem in both the single and multi-robot scenarios 21 Localização baseada em Modelos de Markov The 1D case 1. Start No knowledge at start, thus we have an uniform probability distribution. 2. Robot perceives first door Seeing only one door, the probability being at door 1, 2 or 3 is equal. 3. Robot moves Action model enables to estimate the new probability distribution based on the previous one and the motion Robot perceives second door Base on all prior knowledge the probability being at door 2 becomes dominant 11
; -Particle resampling: Generate new particles")

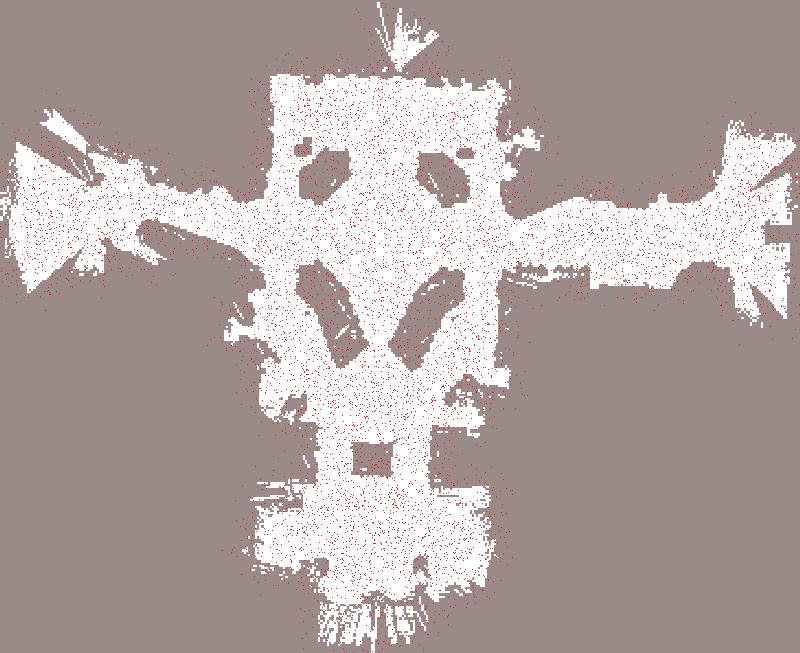
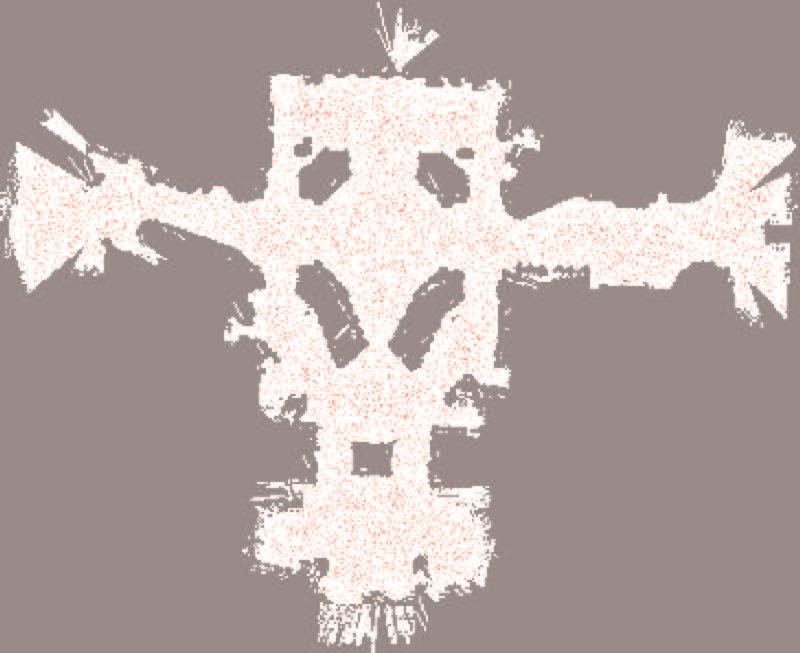
12 Localização baseada em Técnicas de Monte Carlo MCL - Monte Carlo Localization Method - Particles: Position/Orientation (pose) estimation ; - Dead-reckoning: Estimate new position after move; - Particle filter: Use sensorial information to select the best particles (most probable / correct poses); -Particle resampling: Generate new particles centered around the best particle. 23 Localização baseada em Técnicas de Monte Carlo Particles: Uniform probability distribution along ALL the possible robot positions - Book: Probabilistic Robotics Authors: Sebastian Thrun Wolfram Burgard Dieter Fox Publisher: MIT Press, Web site for the book & more slides:

13 Localização baseada em Técnicas de Monte Carlo 25 Particles: Sensor Information => Importance Sampling Localização baseada em Técnicas de Monte Carlo 26 Particles: Robot Motion 13

14 Localização baseada em Técnicas de Monte Carlo 27 Particles: Sensor Information => Importance Sampling Localização baseada em Técnicas de Monte Carlo 28 Particles: Robot Motion 14

15
16
17
18
19
20
21
22
23
24 a) Continuous map with single hypothesis b) Continuous map with multiple hypothesis d) Discretized map with probability distribution d) Discretized topological map with probability distribution 48 24
25 49 Arquiteturas Avançadas para Localização SLAM Modelo SLAM SLAM = Simultaneous localization and mapping Refs: SLAM OpenSLAM MATLAB SLAM Book: Probabilistic Robotics - The MIT Press (2005) by Sebastian Thrun, Wolfram Burgard, Dieter Fox 50 25
26 Referências Bibliográficas: Auto-Localização Livros/Slides: * Probabilistic Robotics - The MIT Press (2005) Sebastian Thrun, Wolfram Burgard, Dieter Fox * Introduction to Autonomous Mobile Robots (2004) Roland Siegwart and Illah Nourbakhsh * Computational Principles of Mobile Robotics (2000) Gregory Dudek, Michael Jenkin Material Complementar: Sistema de Controle Híbrido para Robôs Móveis Autônomos (2002) Farlei Heinen (Orientador: F.Osório), Unisinos - Mestrado em Computação Aplicada. Disponível on-line em: 51 I FORMAÇÕES SOBRE A DISCIPLI A USP - Universidade de São Paulo - São Carlos, SP ICMC - Instituto de Ciências Matemáticas e de Computação SSC - Departamento de Sistemas de Computação SEER LRM Lab. de Robótica Móvel: Prof. Fernando Santos OSÓRIO Web institucional: Página pessoal: fosorio [at] icmc. usp. br ou fosorio [at] gmail. com 52 Disciplina de Robôs Móveis Autônomos (PG-CCMC) Web Disciplinas: > Programa, Material de Aulas, Critérios de Avaliação, > Material de Apoio, Trabalhos Práticos 26
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
15/05/2013. Localização I. Localização. Localização: classificação. Localização: classificação. Tipo de ambiente. Ambiente dinâmico - soluções
 SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 01
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 01
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 27 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Localização É um componente essencial para um robô ser completamente
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 27 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Localização É um componente essencial para um robô ser completamente
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto Nacional de C&T
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto Nacional de C&T
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
SISTEMAS ROBÓTICOS AUTÓNOMOS
 SISTEMAS ROBÓTICOS AUTÓNOMOS Mestrado Integrado em Engenharia Eletrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto A. Paulo G. M. Moreira Pag. 1 SISTEMAS ROBÓTICOS AUTÓNOMOS
SISTEMAS ROBÓTICOS AUTÓNOMOS Mestrado Integrado em Engenharia Eletrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto A. Paulo G. M. Moreira Pag. 1 SISTEMAS ROBÓTICOS AUTÓNOMOS
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros Sistemas de Localização Bibliografia Recomendada
 Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Prof. Denis Wolf & Fernando Santos
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Prof. Denis Wolf & Fernando Santos
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2011 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Gustavo Pessin - pessin [at] gmail.com
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2011 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Gustavo Pessin - pessin [at] gmail.com
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
SLAM II Localização e Mapeamento Simulatâneos
 SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Disciplina de SSC Elementos de Lógica Digital II (Prática)
") USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
IA Robótica Móvel II - Locomoção e Localização
 Planejamento para IA Robótica Móvel II - e Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 23 de Novembro de 2010 1 /
Planejamento para IA Robótica Móvel II - e Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 23 de Novembro de 2010 1 /
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Fev. 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Fev. 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Fev. 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Fev. 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO
 UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO Alan Porto Bontempo, Marley Vellasco e Karla Figueiredo* Pontifícia Universidade
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO Alan Porto Bontempo, Marley Vellasco e Karla Figueiredo* Pontifícia Universidade
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2013 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE:
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2013 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE:
Transmitir aos alunos conhecimentos sobre robótica fixa e móvel, visando capacitá-los a desenvolver
 DISCIPLINA: ELE228 - Robótica A Créditos: 4 Caráter: Eletiva UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PROGRAMA DE PÓS-GRADUAÇÃO
DISCIPLINA: ELE228 - Robótica A Créditos: 4 Caráter: Eletiva UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PROGRAMA DE PÓS-GRADUAÇÃO
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Arquitetura de Computadores: Introdução
 USP SSC5 - Informática T / 2-2 USP - ICMC - SSC SSC 5 - Informática - 2o. Semestre 2 : Introdução Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP SSC5 - Informática T / 2-2 USP - ICMC - SSC SSC 5 - Informática - 2o. Semestre 2 : Introdução Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Disciplina de SSC Elementos de Lógica Digital II (Prática)
") USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
IMPLEMENTAÇÃO E ANÁLISE DE LOCALIZAÇÃO EM ROBÓTICA MÓVEL POR FILTRO DE KALMAN
 IMPLEMENTAÇÃO E ANÁLISE DE LOCALIZAÇÃO EM ROBÓTICA MÓVEL POR FILTRO DE KALMAN Claudiney Calixto da Silva (PG), Juliano Augusto Pereira (PG) Divisão de Ciência da Computação - Instituto Tecnológico de Aeronáutica
IMPLEMENTAÇÃO E ANÁLISE DE LOCALIZAÇÃO EM ROBÓTICA MÓVEL POR FILTRO DE KALMAN Claudiney Calixto da Silva (PG), Juliano Augusto Pereira (PG) Divisão de Ciência da Computação - Instituto Tecnológico de Aeronáutica
VITOR LUIZ MARTINEZ SANCHES UM SISTEMA DE LOCALIZAÇÃO ROBÓTICA PARA AMBIENTES INTERNOS BASEADO EM REDES NEURAIS
 VITOR LUIZ MARTINEZ SANCHES UM SISTEMA DE LOCALIZAÇÃO ROBÓTICA PARA AMBIENTES INTERNOS BASEADO EM REDES NEURAIS SÃO PAULO 2009 VITOR LUIZ MARTINEZ SANCHES UM SISTEMA DE LOCALIZAÇÃO ROBÓTICA PARA AMBIENTES
VITOR LUIZ MARTINEZ SANCHES UM SISTEMA DE LOCALIZAÇÃO ROBÓTICA PARA AMBIENTES INTERNOS BASEADO EM REDES NEURAIS SÃO PAULO 2009 VITOR LUIZ MARTINEZ SANCHES UM SISTEMA DE LOCALIZAÇÃO ROBÓTICA PARA AMBIENTES
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
 LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN ESTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN ESTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
Uma Abordagem Híbrida para Localização e Mapeamento Simultâneos para Robôs Móveis com Sonares Através de Filtro de Kalman Estendido
 Alan Porto Bontempo Uma Abordagem Híbrida para Localização e Mapeamento Simultâneos para Robôs Móveis com Sonares Através de Filtro de Kalman Estendido Dissertação de Mestrado Dissertação apresentada ao
Alan Porto Bontempo Uma Abordagem Híbrida para Localização e Mapeamento Simultâneos para Robôs Móveis com Sonares Através de Filtro de Kalman Estendido Dissertação de Mestrado Dissertação apresentada ao
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2011 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2011 Prof. Fernando Santos
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2011 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2011 Prof. Fernando Santos
CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA
 CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA 1. INTRODUÇÃO A robótica é uma ciência que se dedica a desenvolver dispositivos capazes de realizar tarefas automaticamente empregando
CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA 1. INTRODUÇÃO A robótica é uma ciência que se dedica a desenvolver dispositivos capazes de realizar tarefas automaticamente empregando
LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO FILTRO DE KALMAN EXTENDIDO
 LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN EXTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN EXTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2013 Prof. Denis Wolf & Fernando Santos OSÓRIO Email: { denis, fosorio } [at] { icmc. usp. br } Web: http://www.icmc.usp.br/~denis/ http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2013 Prof. Denis Wolf & Fernando Santos OSÓRIO Email: { denis, fosorio } [at] { icmc. usp. br } Web: http://www.icmc.usp.br/~denis/ http://www.icmc.usp.br/~fosorio/
Disciplina de. Organização de Computadores Digitais
 USP - SSC-5 Bach. Sist Info / 24-2 USP - ICMC - SSC SSC 5 - Sist. Informação - 2o. Semestre 24 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - SSC-5 Bach. Sist Info / 24-2 USP - ICMC - SSC SSC 5 - Sist. Informação - 2o. Semestre 24 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
Disciplina de. Organização de Computadores Digitais
 USP - SSC-5 Bach. Sist Info / 24-2 USP - ICMC - SSC SSC 5 - Sist. Informação - 2o. Semestre 24 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - SSC-5 Bach. Sist Info / 24-2 USP - ICMC - SSC SSC 5 - Sist. Informação - 2o. Semestre 24 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
CONTROLE DE TRAJETÓRIA DE UM ROBÔ MÓVEL COM TRAÇÃO DIFERENCIAL USANDO LÓGICA NEBULOSA
 CONTROLE DE TRAJETÓRIA DE UM ROBÔ MÓVEL COM TRAÇÃO DIFERENCIAL USANDO LÓGICA NEBULOSA Saulo Egberto Andreoti 1, Thainan Augustinho Menezes 1, Mário Eduardo Bordon 2 1, 2 DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CONTROLE DE TRAJETÓRIA DE UM ROBÔ MÓVEL COM TRAÇÃO DIFERENCIAL USANDO LÓGICA NEBULOSA Saulo Egberto Andreoti 1, Thainan Augustinho Menezes 1, Mário Eduardo Bordon 2 1, 2 DEPARTAMENTO DE ENGENHARIA ELÉTRICA
MP-208: Filtragem Ótima com Aplicações Aeroespaciais
 MP-208: Filtragem Ótima com Aplicações Aeroespaciais Capítulo 1: Introdução Davi Antônio dos Santos Departamento de Mecatrônica Instituto Tecnológico de Aeronáutica davists@ita.br São José dos Campos,
MP-208: Filtragem Ótima com Aplicações Aeroespaciais Capítulo 1: Introdução Davi Antônio dos Santos Departamento de Mecatrônica Instituto Tecnológico de Aeronáutica davists@ita.br São José dos Campos,
XIII Simpósio Brasileiro de Automação Inteligente Porto Alegre RS, 1 o 4 de Outubro de 2017
 FILTRO DE KALMAN ESTENDIDO BASEADO EM VISÃO COMPUTACIONAL E ODOMETRIA APLICADO À LOCALIZAÇÃO DE ROBÔS MÓVEIS Fabrício de Oliveira Coelho, João Pedro Carvalho de Souza, Milena Faria Pinto, Guilherme Marins
FILTRO DE KALMAN ESTENDIDO BASEADO EM VISÃO COMPUTACIONAL E ODOMETRIA APLICADO À LOCALIZAÇÃO DE ROBÔS MÓVEIS Fabrício de Oliveira Coelho, João Pedro Carvalho de Souza, Milena Faria Pinto, Guilherme Marins
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
SLAM Visual. Fernando Zuher Mohamad Said Cavalcante Orientadora: Profª. Drª. Roseli Romero Mestrado em Computação, ICMC-USP
 SLAM Visual Fernando Zuher Mohamad Said Cavalcante Orientadora: Profª. Drª. Roseli Romero Mestrado em Computação, ICMC-USP Divisão da apresentação 1. Introdução O que é SLAM? Classificação adotada 2. Principais
SLAM Visual Fernando Zuher Mohamad Said Cavalcante Orientadora: Profª. Drª. Roseli Romero Mestrado em Computação, ICMC-USP Divisão da apresentação 1. Introdução O que é SLAM? Classificação adotada 2. Principais
Implementação do Filtro de Kalman Estendido
 UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
SISTEMAS ROBÓTICOS AUTÓNOMOS
 SISTEMAS ROBÓTICOS AUTÓNOMOS Mestrado Integrado em Engenharia Eletrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto A. Paulo G. M. Moreira Pag. 1 SISTEMAS ROBÓTICOS AUTÓNOMOS
SISTEMAS ROBÓTICOS AUTÓNOMOS Mestrado Integrado em Engenharia Eletrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto A. Paulo G. M. Moreira Pag. 1 SISTEMAS ROBÓTICOS AUTÓNOMOS
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Computação para Engenharia Ambiental
 USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
Mapeamento com Sonar Usando Grade de Ocupação Baseado em Modelagem Probabilística
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO Mapeamento com Sonar Usando
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO Mapeamento com Sonar Usando
Objetivos do curso. Bibliografia. Critérios de avaliação. Critérios de avaliação. Critérios de avaliação
 Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
Assim, a rápida acumulação de erros pequenos pode causar o fracasso de quase todos os métodos para resolver o problema de SLAM.
 1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Computação para Engenharia Ambiental
 USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
Objetivos do curso. Bibliografia. Critérios de avaliação. Critérios de avaliação. Critérios de avaliação 03/07/2016
 Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem