Robôs Móveis Autônomos
|
|
|
- Izabel Bergmann Bergler
- 5 Há anos
- Visualizações:
Transcrição
1 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC: Instituto Nacional de C&T em Sistemas Embarcados Críticos CROB-SC: Centro de Robótica da USP de São Carlos fosorio [at] { icmc. usp. br, gmail. com } Web: Wiki: Aula 02 Aula 02 RMA: Robôs Móveis Autônomos Agenda: 1. Arquiteturas de Controle 2. Mapas: Construção e Uso (+localização) 3. Planejamento (+localização) 4. Navegação (+localização) 2 Março
2 Introdução RMA Robôs Móveis Autônomos Conceitos Básicos... Introdução aos Sistemas Robóticos SENSORES ATUADORES CONTROLE INTELIGENTE Ciclo: - Percepção [ Planejamento / Decisão ] - Ação Tarefas: 3 Mario Localização (Pose) - Mapas (criar, usar) - Planejar Rotas - Desviar de Obstáculos Percepção Decisão - Ação Laço: Percepção Decisão - Ação Autonomia Percepção: Humana / Robô Decisão: Humana / Robô Ação: Humana / Robô Percepção Decisão Ação Sensores Processamento Motores Autômato - - R Tele-Operado H H R Semi-Autônomo H/R H/R R Autônomo R R R H: Humano R: Robótico 4 Março


3 Arquiteturas de Controle Arquitetura de Controle: Reativo Percebe => Age Deliberativo Planeja/Decide => Age Agentes Autônomos dotados de SENSORES e ATUADORES Reativo: Sensorial Motor Planejamento Deliberativo 5 Abril 2010 Arquiteturas de Controle ARQUITETURAS HÍBRIDAS 6 [J. Okamoto Jr & V. Grassi Jr., 2012] Abril
![Arquitetura de Controle Reativo Puro Controle Reativo Puro Controle: Percepção [ => Decisão => ] => Ação Reativo: Percepção => Ação - Reage diretamente aos estímulos externos; - Esquema](/docs-images/83/87401639/images/4-2.jpg "sensorio-motor; 7 Comportamentos e Tarefas típicas: Reactive Behaviour - Vagar pelo ambiente, evitando colisões e obstáculos; - Acompanhar uma parede ou corredor; - Comportamento direcionado pela")
4 Arquitetura de Controle Reativo Puro Controle Reativo Puro Controle: Percepção [ => Decisão => ] => Ação Reativo: Percepção => Ação - Reage diretamente aos estímulos externos; - Esquema sensorio-motor; 7 Comportamentos e Tarefas típicas: Reactive Behaviour - Vagar pelo ambiente, evitando colisões e obstáculos; - Acompanhar uma parede ou corredor; - Comportamento direcionado pela luz; - Ir em direção a uma determinada orientação Composição de Comportamentos: Direção x Obstáculo Sensores e Atuadores: Simulação Robótica Autônoma Inteligente Simuladores [Clássicos] Simulador do Khepera / SIM 2.0 Unix / Olivier Mitchell / INRIA Sophia Antipolis 8 Março 2011 Sensores: 8 IR / Atuadores: 2 motores com cinemática diferencial F.Osório 1997/98 (Ph.D.) 4
 Arquitetura de")

 10 Evitar colisões e obstáculos")
5 Sensores e Atuadores: Simulação Simulador do Khepera Robô Khepera 9 > 2 DC brushed servo motors with incremental encoders Março 2011 > 8 infrared proximity and ambient light sensors (SFH900) Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo S2 S1 S0 M1 S7 S3 S4 S5 M2 S6 IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) 10 Evitar colisões e obstáculos Sensorial-Motor: Sentir => Agir 5
6 Arquitetura de Controle: Reativo 11 CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora S0 S1 M1 S7 S2 S3 M2 S6 S4 S5 Sensores: 8 - S0 à S7 Comandos: 3 ações (L=Turn Left, F=Forward, R=Turn Right) S0 S1 S2 S3 S4 S5 S6 S7 L F R Evitar 6 colisões 0 3 e obstáculos Sensorial-Motor: Sentir 1 => 0 Agir 0 1 Controle Reativo IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left)? IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) 12 Evitar colisões e obstáculos Sensorial-Motor: Sentir => Agir 6
7 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo Se Longe_Demais(Dist_Parede) Então Gira_Direção(Lado_da_Parede); Se Próximo_Demais(Dist_Parede) Então Gira_Direção(Lado_Oposto_da_Parede); Se Distância_Adequada(Dist_Parede) Então Move_Para_Frente(); 13 Seguir o contorno de uma parede Sensorial-Motor: Sentir => Agir Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnicas: - Desvio reativo de Obstáculos - Campos Potenciais Problemas... Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas LOCAIS Houston, we have a problem! >> Mínimos Locais >> Passado, Memória e Contexto Alternância: Oscilação Esq, Dir, Esq, Dir, Esq, Dir,



8 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Problemas... Houston, we have a problem! >> Mínimos Locais >> Passado, Memória e Contexto 15 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas 16 Força de Atração Força de Repulsão 8



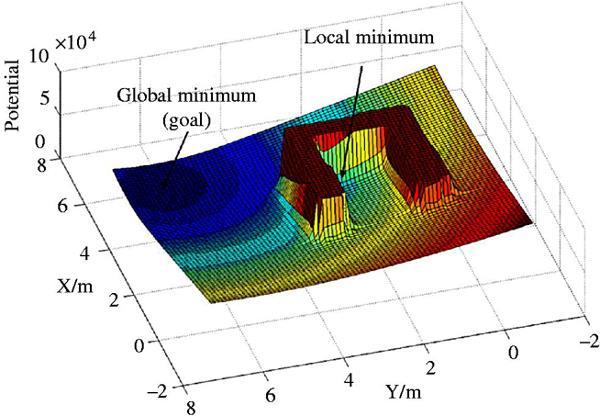
9 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas 17 Forças Combinadas: Força de Atração + Força de Repulsão Potential Fields Tutorial Michael A. Goodrich Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas PROBLEMA DO MÍNIMO LOCAL 18 Forças Combinadas: Força de Atração + Força de Repulsão 9




10 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Múltiplos Robôs => Boids / Steering [Craig Reynolds] Boids: Steering Behaviours: 19 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Em Direção ao Deliberativo... ROBO CODE 20 /** * Fire when we see a robot */ public void onscannedrobot(scannedrobotevent e) { fire(1); } /** * We were hit! Turn perpendicular to the bullet, * so our seesaw might avoid a future shot. */ public void onhitbybullet(hitbybulletevent e) { turnleft(90 - e.getbearing()); } 10
![Arquitetura de Controle Deliberativo Controle Deliberativo Puro Controle: [Percepção =>] Conhecimento e Decisão => Ação Deliberativo: Planeja, Delibera => Ação - Possui conhecimento sobre a situação](/docs-images/83/87401639/images/11-2.jpg "do robô e do ambiente; - Usualmente baseado no uso de mapas e planejamento de trajetórias.")

11 Arquitetura de Controle Deliberativo Controle Deliberativo Puro Controle: [Percepção =>] Conhecimento e Decisão => Ação Deliberativo: Planeja, Delibera => Ação - Possui conhecimento sobre a situação do robô e do ambiente; - Usualmente baseado no uso de mapas e planejamento de trajetórias. Tarefas típicas: Behaviour : Task Planning, Action Sequence 21 - Execução de scripts de ações planejadas previamente; - Executar uma seqüência de ações previamente determinada; - Seguir trajetórias especificadas com uso de mapas; - Execução de Tarefas de Alto Nível; Arquitetura de Controle Deliberativo Controle Deliberativo MAPAS DO AMBIENTE: Métrico / Topológico - Mapa Métrico do tipo GRADE (Grid, Mapa de Ocupação) - Mapa Métrico do tipo GEOMÉTRICO (Geometria do Ambiente) 22 Farlei Heinen,

, GiraEsq (90º), Frente (500cm), GiraDir(45º) 23 Março 2009 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento")
12 Planejamento de Trajetórias Pré-Planejamento: Controle Deliberativo Planejamento na I.A. Clássica: Se for possível identificar um estado inicial e garantir uma seqüência de ações que me levam de um estado a outro até um estado final conhecido... Planejamento Malha Aberta Script de Ações. Exemplo: Frente (100cm), GiraEsq (90º), Frente (500cm), GiraDir(45º) 23 Março 2009 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico hierárquico Março 2009 Planos: Ir de 1 até Ir de até 1.3:
13 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 25 Março 2009 Algoritmo de Dijkstra: Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 26 Março 2009 Algoritmo de Dijkstra: 13
14 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 27 Março 2009 Algoritmo de Dijkstra: Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 28 Março 2009 Algoritmo de Dijkstra: 14
15 Sensores e Atuadores: Simulação SIMROB2D Referência: Farlei Heinen (Orientador: Fernando Osório ) Robótica Autônoma: A integração entre planificação e comportamento reativo Sensores: 5 IR / Atuadores: 2 motores (diferencial) 29 Março 2011 Fernando Osório, Farlei Heinen (TCC) Arquitetura de Controle: Deliberativo SIMROB2D Espaço de Configuração MAPA DO AMBIENTE - Geometrico Grafo de Visibilidade 30 15



16 Arquitetura de Controle: Deliberativo SIMROB2D Caminho Ótimo no Grafo: Djikstra Grafo de Visibilidade 31 Arquitetura de Controle: Deliberativo PLANEJAMENTO DE TRAJETÓRIAS Baseado em Mapas Múltiplos Algoritmos Navegação baseada em Mapa de Ocupação: Planejamento A* Navegação baseada em Mapa Geométrico: Grafo+Dijkstra 32 Navegação baseada em Mapa Geométrico: Diagramas de Voronoi Farlei Heinen,

![[Matthews 2003] Controle Robótico Inteligente:](/docs-images/83/87401639/images/17-1.jpg "Deliberativo A* Planejamento de Trajetórias [Tutorial")
17 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos 33 [Matthews 2003] Controle Robótico Inteligente: Deliberativo A* Planejamento de Trajetórias [Tutorial SBGames 2007] 34 17

![[Tutorial SBGames07] Busca](/docs-images/83/87401639/images/18-1.jpg "Heurística de Caminhos [Lester")
![2004, 2007] 35 Heurística](/docs-images/83/87401639/images/18-3.jpg "de Caminhos Custo de um")

18 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos [Lester 2004, 2007] 35 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:. G = Percorrido, H = Estimado 36 18

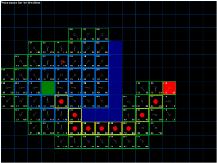
19 Planejamento de Trajetórias Planejamento: Usando o Mapa de Ocupação Planejamento em um Grid: Uso do D* The D* algorithm (Dynamic A*) plans optimal traverses in real-time by incrementally repairing paths to the robot s state as new information is discovered. It is widely used in vehicle navigation applications. In several navigation and exploration applications, the environment is not known prior to pathfinding. A* needs to know the MAP to (pre)plan. D* is an incremental algorithm. 37 Março 2009 Reference: The Focussed D* Algorithm for Real-Time Replanning Anthony Stentz - Robotics Institute - Carnegie Mellon University, 1995 Planejamento de Trajetórias Planejamento: Usando o Mapa de Ocupação Planejamento em um Grid: Uso do D* [Stentz 95] 38 Março
![Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca](/docs-images/83/87401639/images/20-1.jpg "Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:.")


 >> Erros de")
20 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:. G = Percorrido, H = Estimado MAPA: Custo do Terreno a ser Atravessado 39 Arquitetura de Controle: Deliberativo CONTROLE: Arquiteturas Deliberativo Deliberativo: Planejamento Técnicas: - Grafo de Visibiliade - Voranoi - A*... Problemas... Seguir em direção a um alvo Planejamento de Trajetória com Mapa * Deliberativo puro baseado em informações externas GLOBAIS Houston, we have a problem! >> Mapas com informações imprecisas >> Obstáculos Dinâmicos (não mapeados) >> Erros de localização do robô 40 Localização => Tem que ser precisa! Mapa do Ambiente => Tem que ser exato! 20
21 Arquiteturas de Controle Arquitetura de Controle: Reativo Percebe => Age Deliberativo Planeja/Decide => Age Agentes Autônomos dotados de SENSORES e ATUADORES Reativo: Sensorial Motor Planejamento Deliberativo 41 Abril 2010 Arquiteturas de Controle Reativo: Sensorial Motor Planejamento Deliberativo 42 Março
22 Arquitetura de Controle CONTROLE: Arquiteturas Reativas Ambas possuem problemas e limitações! CONTROLE: Arquiteturas Deliberativas Solução? Buscar aproveitar o que de melhor tem cada uma das duas abordagens... SISTEMAS HÍBRIDOS! 43 Arquiteturas de Controle ARQUITETURAS HÍBRIDAS 44 [J. Okamoto Jr & V. Grassi Jr., 2013] Abril
23 Arquiteturas de Controle Controle e Autonomia Arquiteturas de Controle Robótico Arquitetura Reativa Arquitetura Deliberativa Arquitetura Hierárquica Arquitetura Híbrida Controle => Tomada de Decisão para Realizar Ações Arquitetura => Modelo de Tomada de Decisão Autonomia => Independência e Robustez na Tomada de Decisões 45 Abril 2010 Arquiteturas de Controle Híbridas Controle Hierárquico Vertical Hierarquia de Comportamentos: - Evitar/Desviar de obstáculos - Seguir em uma determinada direção - Seguir uma determinada rota 46 Abril
24 Arquiteturas de Controle Híbridas Controle Hierárquico Vertical Brooks - Arquitetura Subsumption 47 Abril 2010 Figures From: Brooks, R. A. MIT A.I. Memo 864 Sept Arquiteturas de Controle Híbridas Controle Hierárquico Arquiteturas Hierárquicas Verticais Brooks-Subsumption Arquitetura Hierárquicas Horizontais SMPA Sense Model - Plan - Act 48 Abril
25 Arquiteturas de Controle Híbridas Controle Hierárquico/Híbrido: SMPA Controle Híbrido Farlei Heinen 49 Abril 2010 PLAN: Dijkstra ACT & ReACT Arquiteturas de Controle Híbridas Arquiteturas Híbridas Controle Híbrido: Arquitetura com Estados Internos (Autômato) 50 Abril
 + frente/ré Cinemática do tipo Ackerman (veículo) / Sem simulação da dinâmica do veículo Fernando Osório, Farlei Heinen (Seminco, SBRN 2002) Sensores e Atuadores: Simulação SEVA3D")
26 Sensores e Atuadores: Simulação SEVA2D Simulador de Estacionamento de Veículos Autônomos 2D 51 Março 2011 Sensores: 6 sensores de proximidade Atuadores: atuador de direção (steering) e de aceleração (gas pedal) + frente/ré Cinemática do tipo Ackerman (veículo) / Sem simulação da dinâmica do veículo Fernando Osório, Farlei Heinen (Seminco, SBRN 2002) Sensores e Atuadores: Simulação SEVA3D Simulador de Estacionamento de Veículos Autônomos 3D Searching Parking Space Positioning Outside Entering Positioning Inside Aligning 52 Março 2011 Sensores: Sonar (configurável pelo usuário) e Odômetro Atuadores: Cinemática Ackerman (velocidade e giro da direção) 26
27 Autômato SEVA: Estacionamento Autônomo SEVA-A: Autômato de Controle Procurando_Vaga Posicionando Entrando_Vaga Posicionando_Vaga Parado Alinhando Otimizando_Vaga 53 Autômato de estados finitos (FSA): Estado E, Sensores S => Estado E, Comando C Autômato SEVA: Estacionamento Autônomo Se Estado_Atual(Procurando_Vaga) e Próximo_ao_Obstáculo(V[4]) e Próximo_ao_Obstáculo(V[5]) Então Speed = Avanço_Rápido e RotVel = Direção_Reta; Se Estado_Atual(Procurando_Vaga) e Longe do_obstáculo(v[2])e Longe do_obstáculo(v[3]) e Longe do_obstáculo(v[4]) e Longe do_obstáculo(v[5]) Então Troca_Estado(Posicionando) e Inicializa(Odômetro); Se Estado_Atual(Posicionando) Então Speed = Avanço_Rápido e Rotvel = Direção_Reta; Se Estado_Atual(Posicionando) e Longe_do_Obstáculo(V[4]) e Deslocamento_Suficiente(Odômetro) Então Estado_atual(Entrando_Vaga) e Inicializa(Odômetro); Se Estado_Atual(Entrando_Vaga) Então Speed = Ré_Rápida e RotVel = Giro_Esquerda_Max; 54 Problemas: Usuário deve explicitar as regras, estas regras são pouco robustas, estão sujeitas a erros, são pouco flexíveis e de difícil adaptação a novas situações; 27

 Autônomos")
 e Odômetro Atuadores: Cinemática")

28 Sensores e Atuadores: Simulação SEVA3D Simulador de Estacionamento de Veículos Autônomos 3D Searching Parking Space Positioning Outside Entering Positioning Inside Aligning 55 Março 2011 Sensores: Sonar (configurável pelo usuário) e Odômetro Atuadores: Cinemática Ackerman (velocidade e giro da direção) Sensores e Atuadores: Simulação SEVA3D Simulador de Estacionamento de Veículos Autônomos 3D Fernando Osório Farlei Heinen Milton Heinen (IJCNN 2006) 56 Março 2011 Sensores: Sonar (configurável pelo usuário) e Odômetro Atuadores: Cinemática Ackerman Usual: 6 sonares com posições específicas, odômetro, controle de velocidade e de giro da direção 28
 DECISÃO 57 Abril 2010 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs")
 Fernando Osório, Farlei Heinen (M.")
29 Arquiteturas de Controle Híbridas Arquiteturas Híbridas Controle Híbrido: Arquitetura com Estados Internos (Autômato + Rede Neural) DECISÃO 57 Abril 2010 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs 3D / Controle Híbrido COHBRA 58 Março 2011 Sensores: Bumper, IR ou Sonar (configurável pelo usuário) Atuadores: Cinemática diferencial ou Ackerman (configurável pelo usuário) Fernando Osório, Farlei Heinen (M.Sc.) 29
 Atuadores: Cinemática diferencial ou Ackerman (configurável pelo usuário) Março 2011 Sensores e")
 Atuadores: Cinemática Diferencial ou Ackerman (configurável pelo usuário) Fernando Osório, Farlei")
30 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs 3D / Controle Híbrido COHBRA 59 Sensores: Bumper, IR ou Sonar (configurável pelo usuário) Atuadores: Cinemática diferencial ou Ackerman (configurável pelo usuário) Março 2011 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs 3D / Controle Híbrido COHBRA 60 Março 2011 Sensores: Bumper, IR ou Sonar (configurável pelo usuário) Atuadores: Cinemática Diferencial ou Ackerman (configurável pelo usuário) Fernando Osório, Farlei Heinen (M.Sc.) 30

31 Arquiteturas de Controle Híbridas Controle Híbrido Robusto COHBRA / SimRob3D 61 Abril 2010 Arquiteturas de Controle Híbridas Controle Híbrido Robusto COHBRA / SimRob3D Mapa: Geométrico, Grade, Topológico Auto-Localização Planejamento de Trajetória Desvio de Obstáculos 62 Abril 2010 Controle Híbrido Reativo / Deliberativo 31
32 Arquiteturas de Controle Híbridas Arquiteturas para Robôs Móveis Autônomos Referências do Material Apresentado: HEINEN, Farlei ; OSÓRIO, Fernando S.. HyCAR - A Robust Hybrid Control Architecture for Autonomous Robots. In: HIS Hybrid Intelligent Systems, 2002, Santiago do Chile. Soft Computing Systems - Design, Management and Applications. Frontiers in Artificial Intelligence and Applications Series: IOS Press, v. 87. p ( usp / guest ) [Arquitetura COHBRA] Farlei Heinen. Sistema de Controle Híbrido para Robôs Móveis Autônomos [SimRob3D / COHBRA] Dissertação (Mestrado em Computação Aplicada) - Universidade do Vale do Rio dos Sinos Orientador: Fernando Santos Osório. HEINEN, Milton Roberto ; OSÓRIO, Fernando S. ; HEINEN, Farlei ; KELBER, Christian. SEVA3D: Autonomous Vehicles Parking Simulator in a three-dimensional environment. INFOCOMP (UFLA), v. 6, p , HEINEN, Milton Roberto ; OSÓRIO, Fernando S. ; HEINEN, Farlei ; KELBER, Christian. SEVA3D: Using Artificial Neural Networks to Autonomous Vehicle Parking Control.. In: IJCNN IEEE International Joint Conference on Neural Networks, 2006, Vancouver. Proceeding of the WCCI (World Congress on Computational Intelligence) - IJCNN. Vancouver, Canadá : IEEE Press, v. 1. p Farlei Heinen. Robótica Autônoma: Integração entre Planificação e Comportamento Reativo [SimRob2d] Trabalho de Conclusão de Curso. (Graduação em Informática) Univ. do Vale do Rio dos Sinos. Orientador: F. Osório Abril 2010 Luciane Fortes. Aplicação de Técnicas de Aprendizado para o Controle Inteligente de Veículos Autônomos Trabalho de Conclusão de Curso. (Graduação em Informática) Univ. do Vale do Rio dos Sinos. Orientador: F. Osório. Arquiteturas de Controle Híbridas Arquiteturas para Robôs Móveis Autônomos Demos do Material Apresentado: (software) Java Demo Dijkstra Java Demo Dijkstra Expanded A Star (A*) A* Demo1: A* Demo2: A* Demo3: A* Demo4: A* Descrição: Tutorial SBGames 2007 Campos Potenciais Demo Java: Intro: Intro: 64 Abril 2010 Comportamentos: Boids: Steering Behaviours: (Crayg Reynolds) Complementos: Wikipedia, A*_search_algorithm, D*_search_algorithm, Dijkstra's_algorith 32
33 Mapas Construção e Uso * Tipos de Mapas Mapas Sensorial, Mapa Métrico (Geométrico, Grade de Ocupação), Mapa Topológico, Informações Semânticas * Mapeamento Geração de Mapas de Ocupação Geração de Mapas Geométricos Geração de Mapas Topológicos * Navegação baseada em Mapas Planejamento de Trajetórias Desafios e Problemas de Navegação 65 Mapas Construção e Uso Controle de Robôs Móveis Autônomos Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control? 66 33
34 Mapas Construção e Uso Controle de Robôs Móveis Autônomos Perception? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching 67 Odometry, Dead Reckoning Localization base on external sensors, beacons or landmarks Probabilistic Map Based Localization Perception Observation raw sensor data or extracted features Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens - São mapas baseados em leituras diretas dos sensores, permitindo conectar de modo mais direto possível a representação do ambiente com as leituras sensoriais -A idéia básica é fazer medidas sensoriais conectadas com a informação de odometria, e então usar uma técnica como servo-controle: Sensor-Based Servoing E.g. Image-Based Servoing ou Visual Servoing [Dudek/Jenkin 2000 Seções 7.3 e 8.1] 68 34

 ou mesmo Imagens 69")


35 Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 69 Wikipedia: LIDAR Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 70 Sensor-Based Servoing 35
![Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 71 Sensor-Based Servoing [Matsumoto, Inaba, Inoue 1996] Mapa Métrico -](/docs-images/83/87401639/images/36-1.jpg "Armazena uma descrição métrica do ambiente. - Tipos de Mapas Métricos: Mapa de Ocupação (e.g.")
36 Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 71 Sensor-Based Servoing [Matsumoto, Inaba, Inoue 1996] Mapa Métrico - Armazena uma descrição métrica do ambiente. - Tipos de Mapas Métricos: Mapa de Ocupação (e.g. grid 2D) Mapa Geométrico 2D (e.g. planta baixa 2D) Mapa Geométrico 3D (e.g. representação em VRML do ambiente) - Os mapas métricos podem ser definidos a priori e fornecidos ao robô, mas também podem ser obtidos (construídos) pelo próprio robô a partir de suas leituras sensoriais do ambiente. - Mapas métricos devem respeitar as dimensões e relações de tamanho e distância entre objetos e elementos presentes no ambiente
37 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D 73 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D 74 Definições: - Resolução/Amostragem (Lin x Col) - Dimensão/Proporção (cada elemento da grade corresponde a X cm 2 ) - Informação da célula da grade (valores, quantização) 37
 - Informação da célula da grade (valores, quantização) Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D Mapas Probabilísticos (Grau de Certeza) 76")
38 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D 75 Definições: - Resolução/Amostragem (Lin x Col) - Dimensão/Proporção (cada elemento da grade corresponde a X cm 2 ) - Informação da célula da grade (valores, quantização) Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D Mapas Probabilísticos (Grau de Certeza) 76 38
![Mapa Métrico Mapeamento usando Mapas de Ocupação: usando um Sonar para mapear o ambiente Algoritmo HIMM [Borenstein 91] Histogramic In-Motion Mapping 77 [Edson Prestes e](/docs-images/83/87401639/images/39-1.jpg "Silva Jr 2003] Mapa Métrico Mapeamento usando Mapas de Ocupação Certainty Occupancy Grids, HIMM [Elfes 87, 98] [Borenstein 91] [Prestes 2003] 78 [Edson Prestes e Silva Jr")
39 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando um Sonar para mapear o ambiente Algoritmo HIMM [Borenstein 91] Histogramic In-Motion Mapping 77 [Edson Prestes e Silva Jr 2003] Mapa Métrico Mapeamento usando Mapas de Ocupação Certainty Occupancy Grids, HIMM [Elfes 87, 98] [Borenstein 91] [Prestes 2003] 78 [Edson Prestes e Silva Jr 2003] 39

![91] Mapas de Ocupação 80 [Thrun](/docs-images/83/87401639/images/40-1.jpg "2002] 40")
40 Mapa Métrico Mapeamento usando Mapas de Ocupação 79 [Borenstein 91] Mapa Métrico Mapeamento usando Mapas de Ocupação 80 [Thrun 2002] 40

41 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente 81 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente S. Thrun 82 41


42 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente - Sensor Laser - Localização! - Mapeamento com certainty grids 83 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente - Sensor Laser - Localização! - Mapeamento com certainty grids ERRO DE LOCALIZAÇÃO! 84 42



43 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente Environment Map: Occupancy Grid 85 Sebastian Thrun / CMU Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D com diferentes representações 86 Adaptive Cell Decomposition 43


44 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D com diferentes representações Potential Fields 87 Mapa Métrico Armazenando uma descrição métrica do ambiente: Exact Cell Decomposition Mapa de Ocupação Grade 2D com diferentes representações 88 44
45 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Planta baixa de um prédio Navegar do Ponto A até o Ponto B 89 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Planta baixa de um prédio Navegar do Ponto A até o Ponto B 90 45


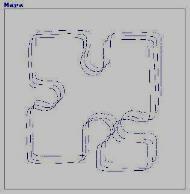
46 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico 91 Points corresponding to a single laser reading Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico Mapeamento: -Nuvem de pontos - Extração de contorno 92 46
47 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico Laser Reading Laser Reading with Detected Lines Porta 93 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico >> Problema das múltiplas leituras


48 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Representações para Navegação Mapa Geométrico com grafo de visibilidade 95 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Representações para Navegação Mapa Geométrico com Diagrama de Voronoi 96 48
49 Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa Decomposição Topológica 97 Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa 98 49
50 Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa MAPAS 99 Mapa Topológico: Identifica as regiões do mapa e sua conectividade Pode ser associado a informações de odometria Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa MAPAS 100 Mapa Topológico: Identifica as regiões do mapa e sua conectividade Pode ser associado a informações de odometria 50
 - Armário (elemento estático) - Locais no Mapa: Almoxarifado, Secretaria, Biblioteca, etc.")
51 Mapa Semântico Associando um sentido e função aos elementos do ambiente: Mapa Semântico Exemplos de Informações Semânticas: - Porta (estado da porta: aberta/fechada); - Elevador - Escada - Cadeira (elemento móvel) - Armário (elemento estático) - Locais no Mapa: Almoxarifado, Secretaria, Biblioteca, etc. 101 RMA: Navegação com Mapas Navegação Baseada em Mapas O tipo do mapa irá definir o algoritmo de navegação empregado. Por exemplo: Mapa de Ocupação: A*, campos potenciais Mapa Geométrico 2D: Grafo de Visibilidade, A* Mapa Topológico: Navegação por pontos de referência 102 Grafo de Visibilidade + Djikstra A Star (A*) 51
 ao mesmo tempo que se direciona para o alvo (atração) Destino Obstáculos Origem 103 Março 2009 Inimigo: Time")
 Navegação com desvio de obstáculos Navegação: Campos Potenciais")
 Adição repulsão; 6) Trajetória Potential Fields in Games: http://aigamedev.")
52 Navegação com desvio de obstáculos Navegação: Campos Potenciais Campos Potenciais permitem o desvio de obstáculos (repulsão) ao mesmo tempo que se direciona para o alvo (atração) Destino Obstáculos Origem 103 Março 2009 Inimigo: Time Azul (repulsão = Obstáculo) Amigo: Time Vermelho (atração = destino) Potential Fields in Games: (Obstáculos e Inimigos) Navegação com desvio de obstáculos Navegação: Campos Potenciais Março 2009 Potential Fields: 1) Origem/Destino; 2) Atração: Destino; 3) Propagação da Atração 4) Repulsão: Obstáculo; 5) Adição repulsão; 6) Trajetória Potential Fields in Games: (Obstáculos e Inimigos) 52





53 Navegação com desvio de obstáculos Navegação: Campos Potenciais [Demos] Sysquake LE 105 Março Navegação com desvio de obstáculos Navegação: Campos Potenciais [Demos] NAVEGAÇÃO GLOBAL x LOCAL A* + Campos Potenciais DESVIO: Repulsão aos obstáculos 106 Março 2009 Farlei Heinen
54 Navegação com desvio de obstáculos Navegação: Campos Potenciais [Demos] NAVEGAÇÃO GLOBAL x LOCAL A* + Campos Potenciais DESVIO: Repulsão aos obstáculos A* Planejamento Global Geração de WayPoints Alvo ALVO INTERMEDIÁRIO 107 Março 2009 Farlei Heinen - Navegação com desvio de obstáculos Navegação: Campos Potenciais Algoritmos: VFF Vector Force Fields VFH Vector Force Histogram Implementado no Player/Stage IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7, NO. 3, JUNE 1991 The Vector Field Histogram-Fast Obstacle Avoidance for Mobile Robots Johann Borenstein, Yoram Koren. WEB: Março 2009 Virtual Force Field (VFF) concept: Occupied cells exert repulsive forces onto the robot; magnitude is proportional to the certainty value c(i,j) of the cell and inversely proportional to r^2 54
: The above")



55 Navegação com desvio de obstáculos Algoritmos: VFH Vector Force Histogram 109 Março 2009 Virtual Force Histogram (VFH): The above figure is the heart of the VFH method Mapping active cells onto the polar histogram: Safe and Unsafe cells. Navegação com desvio de obstáculos Navegação baseada em Referências * REFERÊNCIA baseada na DIREÇÃO: Orientação do Destino * REFERÊNCIA baseada em PONTOS: WayPoints * REFERÊNCIA baseada em MARCOS: LandMarks GPS Março
56 Navegação com desvio de obstáculos Navegação: Sistemas Híbridos Navegação: A* + Campos Potenciais Navegação: WayPoints + LandMarks Navegação: Coordenada/Direção + RNA SISTEMAS HÍBRIDOS - Necessidade de um árbitro para selecionar o comportamento adequado e a ação a ser realizada. - Múltiplos comportamentos com seleção: Behavior Selection / Coordination 111 Março 2009 Path Planning Overview Mapas Construção e Uso 1. Road Map, Graph construction Identify a set of routes within the free space 2. Cell decomposition Discriminate between free and occupied cells Where to put the nodes? Topology-based: 112 at distinctive locations Metric-based: where features disappear or get visible Where to put the cell boundaries? Topology- and metric-based: where features disappear or get visible 3. Potential Field Imposing a mathematical function over the space 56
57 Referências Bibliográficas: Mapas Livros/Slides: * Probabilistic Robotics - The MIT Press (2005) Sebastian Thrun, Wolfram Burgard, Dieter Fox * Introduction to Autonomous Mobile Robots (2004) Roland Siegwart and Illah Nourbakhsh * Computational Principles of Mobile Robotics (2000) Gregory Dudek, Michael Jenkin 113 Material Complementar: Farlei Heinen Dissertação de Mestrado ou Edson Prestes e Silva Jr. Tese de Doutorado INFORMAÇÕES SOBRE A DISCIPLINA USP - Universidade de São Paulo - São Carlos, SP ICMC - Instituto de Ciências Matemáticas e de Computação SSC Depto. de Sistemas de Computação GRM - Grupo de Pesquisa em Robóticá Móvel LRM Lab. de Robótica Móvel: Prof. Fernando Santos OSÓRIO Web institucional: Página pessoal: fosorio [at] icmc. usp. br ou fosorio [at] gmail. com 114 Março 2015 Disciplina de Robôs Móveis Autônomos (PG-CCMC) Web Disciplinas: Programa, Material de Aulas, Critérios de Avaliação, Material de Apoio, Trabalhos Práticos Wiki: 57
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Tópicos Especiais I - Jogos IA para Jogos
 Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes
Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2013 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Junho 2013 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2013 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Junho 2013 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de. Robôs Móveis Autônomos SSC-5888
 - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de. Robôs Móveis Autônomos SSC-5888") USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de Robôs Móveis Autônomos SSC-5888 1 Abril 2015 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de Robôs Móveis Autônomos SSC-5888 1 Abril 2015 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 18 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Planejamento de Caminhos O problema de planejamento de caminhos
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 18 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Planejamento de Caminhos O problema de planejamento de caminhos
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
23/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2010 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2010 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
R bó b ti t ca M M vel I nt n e t ligent n e t : D S i S mul u ação à s A p A l p icações n o n
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
GT-JeDi - Curso de Desenv. de Jogos IA para Jogos
 GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 02 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2011 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2011 Prof. Fernando Santos
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2011 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2011 Prof. Fernando Santos
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 01
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 01
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Controle da Tarefa de Estacionamento de um Veículo Autônomo através do Aprendizado de um Autômato Finito usando uma Rede Neural J-CC
 Controle da Tarefa de Estacionamento de um Veículo Autônomo através do Aprendizado de um Autômato Finito usando uma Rede Neural J-CC F. Osório, F. Heinen, L. Fortes UNISINOS Universidade do Vale do Rio
Controle da Tarefa de Estacionamento de um Veículo Autônomo através do Aprendizado de um Autômato Finito usando uma Rede Neural J-CC F. Osório, F. Heinen, L. Fortes UNISINOS Universidade do Vale do Rio
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto Nacional de C&T
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto Nacional de C&T
Trabalho Final de Robótica Desvio de Obstáculos
 Trabalho Final de Robótica Desvio de Obstáculos Pedro Mitsuo Shiroma 1 Introdução Em robótica móvel, navegar entre duas localidades consiste numa tarefa essencial na realização da maioria das missões.
Trabalho Final de Robótica Desvio de Obstáculos Pedro Mitsuo Shiroma 1 Introdução Em robótica móvel, navegar entre duas localidades consiste numa tarefa essencial na realização da maioria das missões.
Temas Principais: Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,...
 3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2011 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Gustavo Pessin - pessin [at] gmail.com
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2011 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Gustavo Pessin - pessin [at] gmail.com
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Prof. Denis Wolf & Fernando Santos
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Prof. Denis Wolf & Fernando Santos
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros Sistemas de Localização Bibliografia Recomendada
 Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Qualificação de Doutorado
 Qualificação de Doutorado Planejamento de Trajetória aplicado à Veículos Autônomos Aluno: Alexandre Rodrigues de Sousa Orientador: Prof. Dr. José Jean-Paul Zanlucchi de Souza Tavares Sumário Introdução
Qualificação de Doutorado Planejamento de Trajetória aplicado à Veículos Autônomos Aluno: Alexandre Rodrigues de Sousa Orientador: Prof. Dr. José Jean-Paul Zanlucchi de Souza Tavares Sumário Introdução
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA
 ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Fev. 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Fev. 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2013 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE:
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2013 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE:
15/05/2013. Localização I. Localização. Localização: classificação. Localização: classificação. Tipo de ambiente. Ambiente dinâmico - soluções
 SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
Prof. Dr. Alexandre da Silva Simões UNESP
 UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
Estacionamento de um Veículo de Forma Autônoma Utilizando Redes Neurais Artificiais
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Estacionamento de um Veículo de Forma Autônoma Utilizando Redes Neurais Artificiais
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Estacionamento de um Veículo de Forma Autônoma Utilizando Redes Neurais Artificiais
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Fev. 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Fev. 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas
 Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Robótica Autônoma Sensores e Atuadores
 * Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
* Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
Modelagem de Ambientes para Robô Móvel baseado em Rede Neural Hierárquica e Visão Omnidirecional
 Modelagem de Ambientes para Robô Móvel baseado em Rede Neural Hierárquica e Visão Omnidirecional LUCIANA L. SILVA 1, HENRIQUE VIAN 1, MARIO L. TRONCO 1, ARTHUR J. V. PORTO 2 1 Laboratório de Automação
Modelagem de Ambientes para Robô Móvel baseado em Rede Neural Hierárquica e Visão Omnidirecional LUCIANA L. SILVA 1, HENRIQUE VIAN 1, MARIO L. TRONCO 1, ARTHUR J. V. PORTO 2 1 Laboratório de Automação
Simulação de Robôs Móveis e Articulados: Aplicações e Prática. Fernando Santos Osório Rafael Alceste Berri
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
Disciplina de SSC Elementos de Lógica Digital II (Prática)
") USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Sistema de Navegação para Robô Móvel Baseada em Visão Omnidirecional e Controlador Fuzzy
 Sistema de Navegação para Robô Móvel Baseada em Visão Omnidirecional e Controlador Fuzzy Mário Luiz Tronco 1 Arthur José Vieira Porto 2 1 Departamento de Ciências de Computação e Estatística Instituto
Sistema de Navegação para Robô Móvel Baseada em Visão Omnidirecional e Controlador Fuzzy Mário Luiz Tronco 1 Arthur José Vieira Porto 2 1 Departamento de Ciências de Computação e Estatística Instituto
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2012 Prof. Denis Wolf &
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2012 Prof. Denis Wolf &
USP - ICMC - SSC SSC o. Semestre Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]
![USP - ICMC - SSC SSC o. Semestre Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]](/thumbs/79/80335974.jpg "USP - ICMC - SSC SSC o. Semestre Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]") USP - ICMC - SSC SSC 0300-2o. Semestre 2013 Disciplina de [ Eng. Elétrica / Automação ] Prof. Dr. Fernando Santos Osório / PAE: Rafael Klaser (LRM / ICMC) LRM - Laboratório de Robótica Móvel do ICMC /
USP - ICMC - SSC SSC 0300-2o. Semestre 2013 Disciplina de [ Eng. Elétrica / Automação ] Prof. Dr. Fernando Santos Osório / PAE: Rafael Klaser (LRM / ICMC) LRM - Laboratório de Robótica Móvel do ICMC /
Universidade do Vale do Rio dos Sinos - UNISINOS Centro de Ciências Exatas e Tecnológicas Mestrado em Computação Aplicada. Proposta de Dissertação
 Universidade do Vale do Rio dos Sinos - UNISINOS Centro de Ciências Exatas e Tecnológicas Mestrado em Computação Aplicada Proposta de Dissertação Sistema de Controle Híbrido para Robôs Móveis Autônomos
Universidade do Vale do Rio dos Sinos - UNISINOS Centro de Ciências Exatas e Tecnológicas Mestrado em Computação Aplicada Proposta de Dissertação Sistema de Controle Híbrido para Robôs Móveis Autônomos
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2013 Prof. Denis Wolf & Fernando Santos OSÓRIO Email: { denis, fosorio } [at] { icmc. usp. br } Web: http://www.icmc.usp.br/~denis/ http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2013 Prof. Denis Wolf & Fernando Santos OSÓRIO Email: { denis, fosorio } [at] { icmc. usp. br } Web: http://www.icmc.usp.br/~denis/ http://www.icmc.usp.br/~fosorio/
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
Uso de Realidade Virtual no Desenvolvimento de um Sistema de Controle do Estacionamento de Veículos Autônomos
 Uso de Realidade Virtual no Desenvolvimento de um Sistema de Controle do Estacionamento de Veículos Autônomos Milton Heinen 2, Fernando Osório 2, Farlei Heinen 3 e Christian Kelber 3 1 Universidade do
Uso de Realidade Virtual no Desenvolvimento de um Sistema de Controle do Estacionamento de Veículos Autônomos Milton Heinen 2, Fernando Osório 2, Farlei Heinen 3 e Christian Kelber 3 1 Universidade do
Transmitir aos alunos conhecimentos sobre robótica fixa e móvel, visando capacitá-los a desenvolver
 DISCIPLINA: ELE228 - Robótica A Créditos: 4 Caráter: Eletiva UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PROGRAMA DE PÓS-GRADUAÇÃO
DISCIPLINA: ELE228 - Robótica A Créditos: 4 Caráter: Eletiva UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PROGRAMA DE PÓS-GRADUAÇÃO
Travel Wayfinding Cap. 6 Livro Bowman Cap. 7 Livro Bowman
 Tarefas Universais de Interação 3D 3D User Interfaces http://www.tecgraf.puc-rio.br/~abraposo/inf2791/ Aula 06 Travel e Wayfinding Alberto Raposo Tecgraf, Depto de Informática., PUC-Rio - Rio de Janeiro
Tarefas Universais de Interação 3D 3D User Interfaces http://www.tecgraf.puc-rio.br/~abraposo/inf2791/ Aula 06 Travel e Wayfinding Alberto Raposo Tecgraf, Depto de Informática., PUC-Rio - Rio de Janeiro