Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
|
|
|
- Marcos César Palhares
- 5 Há anos
- Visualizações:
Transcrição
 Inteligência em jogos Sistemas robóticos")
1 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável Co-projeto de hardware/software Sistemas evolutivos Sistemas elétricos de potência Bioinformática Scheduling (roteamento e escalonamento) Inteligência em jogos Sistemas robóticos Controle inteligente de robôs móveis Estimação de estado Integração e projeto de sistemas eletrônicos e robôs # 2 1


2 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Laboratórios: # 3 Disciplina(s) Obrigatória(s) da área de Computação SEER Sistemas Embarcados, Evolutivos e Robóticos Disciplina Obrigatória SEER: Introdução Sist. Embarcados, Introdução Sist. Evolutivos Introdução Sist. Robóticos SSC5884 SSC5858 SSC5887 Algoritmos de Estimação para Robótica Móvel Disciplinas SEER - Sistemas Multirrobóticos - Projeto de Robôs Móveis Sistemas Robóticos SSC5880 Robôs Móveis Autônomos SSC5888 Sistemas Evolutivos - Metaheurísticas Paralelas - Projeto de Inovação - Algoritmos de Estimação de Distribuição - Modelagem de Problemas Complexos do Mundo Real # 4 Computação Reconfigurável SSC5883 Sistemas Embarcados - Linguagens de Descrição de Hardware - Co-projeto de Hardware/Software - Sistemas Embarcados de Alto Desempenho 2



3 Histórico Unimate (1961) Primeiro robô industrial Shakey (1968) Primeiro robô móvel # 5 Robótica Móvel Um robô móvel é uma máquina capaz de extrair informação do ambiente e usar seu conhecimento sobre o mesmo para se locomover com um propósito definido. Ronald Arkin Principais características: Mobilidade Capacidade de percepção Autonomia Inteligência A robot in every home... Bill Gates # 6 3
:")

:")





4 Histórico Anos 70 (arquiteturas deliberativas): Modelos determinísticos do ambiente Sem capacidade de percepção Anos 80 (arquiteturas reativas): Ausência de modelos do ambiente Alta dependência da capacidade de percepção Início dos anos 90 (arquiteturas híbridas): Combinação de arquiteturas reativas e deliberativas Metade/Fim dos anos 90 (abordagem probabilística): Integração de modelos complexos e percepção Representação de incerteza nos modelos # 7 Robótica Móvel Hoje # 8 07/04/


5 Modelo Básico # 9 Robô Móvel - Componentes Câmera GPS Computador Sensores: câmeras, lasers, sonares, odômetros, GPS e etc Atuadores: rodas, pernas, garras e etc. Sistema computacional: CPU, memória, disco e etc Rodas Laser Sonares Odômetro (encoder) # 10 5
 Unidade Inercial (e)")
 Câmera de vídeo estéreo")




6 Sensores e Robôs - LRM (a) GPS Garmin (c) Unidade Inercial (e) Sensores laser (d) Câmeras de Vídeo (b) Câmera de vídeo estéreo # 11 Robótica Móvel - Problemas Sensores são limitados e imprecisos. Atuadores são limitados e imprecisos. O ambiente e o estado interno do robô são parcialmente observáveis. Ambientes reais são dinâmicos e imprevisíveis. Os modelos do ambiente e do robô são imprecisos e incompletos. # 12 6
7 Robótica Móvel Sistemas Robóticos Móveis Inteligentes Localização Mapeamento Navegação # 13 Localização Estimar a posição do robô em um ambiente previamente conhecido, utilizando Destino informações obtidas por sensores.??? # 14 7




8 Robôs Móveis - Aplicações Guia de museu Mapeamento de minas Verificação da qualidade da água Navegação autônoma # 15 Localização - Problemas Efeito da imprecisão das informações dos sensores: Trajeto real Odometria # 16 8
9 Localização - Problemas Efeito da imprecisão das informações dos sensores: GPS Odometria # 17 Localização Tipos de problemas Tracking Posição inicial é conhecida Busca local (correção de odometria) Localização global Posição inicial não é conhecida Busca global # 18 9
10 Localização - Soluções Framework básico: Filtro de Bayes Representação da posição do robô Distribuição Normal (Filtro de Kalman) Malha de células (Grid / Markov) Partículas/Amostras (Monte Carlo) # 19 Filtro de Bayes Nova estimativa Observação (diminuição de incerteza) Deslocamento do robô (aumento de incerteza) Estimativa anterior # 20 10




11 Malha de células Localização de Monte Carlo # 22 11

12 Robótica Móvel Sistemas Robóticos Móveis Inteligentes Localização Mapeamento Navegação # 23 Mapeamento Criar um modelo do ambiente a partir da localização do robô e das informações obtidas por sensores. # 24 12


13 Tipos de Mapas Mapas métricos: representam propriedades geométricas do ambiente de forma quantitativa. Mapas topológicos: representam a conectividade entre determinados locais do ambiente. Normalmente são utilizados grafos nessa representação. # 25 Mapeamento Métrico Grade de ocupação Dividir o espaço em células e estimar a probabilidade de ocupação de cada célula individualmente baseado na informação obtida pelos sensores. Ao final, cada célula é classificada como ocupada, livre ou indefinido. # 26 13



14 Grade de Ocupação Mapa: occupancy grid # 27 Grade de Ocupação # 28 14
")
15 Mapa baseado somente na odometria # 29 Robótica Móvel Sistemas Robóticos Móveis Inteligentes Localização Mapeamento SLAM (Localização e Mapeamento Simultâneos) Navegação # 30 15




16 Localização e Mapeamento Simultâneos O SLAM é um dos maiores desafios da robótica móvel. Dados: Deslocamento do robô Informações obtidas pelos sensores Deve-se estimar: O mapa do ambiente A localização/trajetória do robô # 31 Slam Summer School # 32 16




17 SLAM Filtro de Kalman Consiste em estimar a posição do robô e dos landmarks com o filtro de Kalman. As posição do robô e dos landmarks são correlacionadas através da matriz de covariância # 33 FastSLAM 3 particulas mapa da particule 1 mapa da particula 3 CSBC JAI 34 # 34 Fundamentos mapa da particula 2 17


18 FastSLAM # 35 FastSLAM - Resultados FastSLAM Odometria # 36 18
19 SLAM - Multirrobô Posição inicial desconhecida. # 37 Robótica Móvel Sistemas Robóticos Móveis Inteligentes Localização Mapeamento Navegação # 38 19



 Campos")
20 Planejamento de Trajetória A*: mapas métricos (grid) CSBC JAI # 39 Fundamentos Dijkstra: mapas métricos/topológicos (grafos) Campos Potencias CSBC JAI # 40 Fundamentos 20

21 Vector Field Histogram - VFH CSBC JAI # 41 Fundamentos Localização e Mapeamento Robô Guia de Museu # 42 21




22 Localização e Mapeamento em Ambientes Urbanos Problemas: Complexidade Escala Irregularidade do terreno Difícil representação # 43 Plataforma Experimental # 44 22



23 Localização Monte Carlo Solução: Grande número de partículas Criação de áreas semi-ocupadas. Obtenção de pitch e roll por uma unidade de medida inercial Depois de localizar o robô, estima-se a trajetória utilizando o filtro de partículas no sentido contrário. # 45 Localização Monte Carlo # 46 23
24 Localização - Resultados # 47 Localização Filtro de Partículas e GPS Cada partícula representa uma possível trajetória completa do robô É atribuído um peso a cada partícula de acordo com sua proximidade do GPS. Partículas que divergem do GPS recebem peso baixo e são eliminadas. Pontos do GPS partículas # 48 24



25 Mapeamento - Resultados # 49 Mapeamento - Resultados # 50 25




26 Mapeamento - Resultados Parte do campus da USC # 51 Mapeamento Aquisição de dados # 52 26




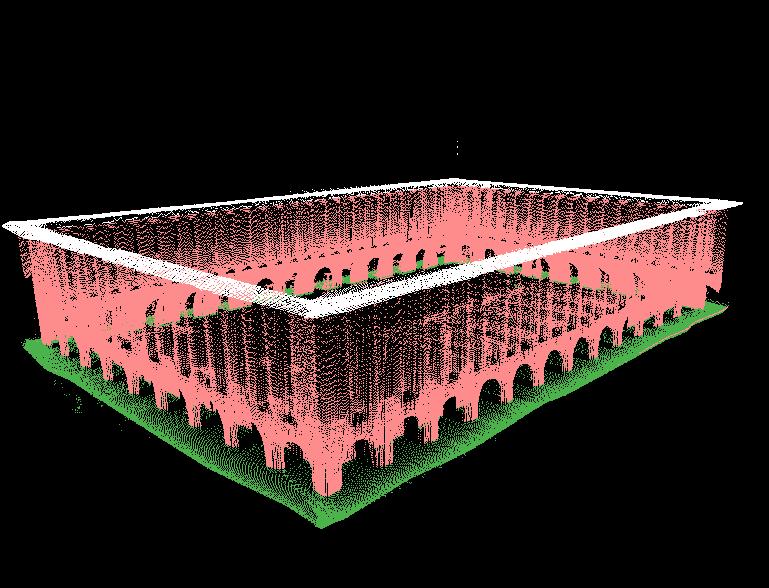
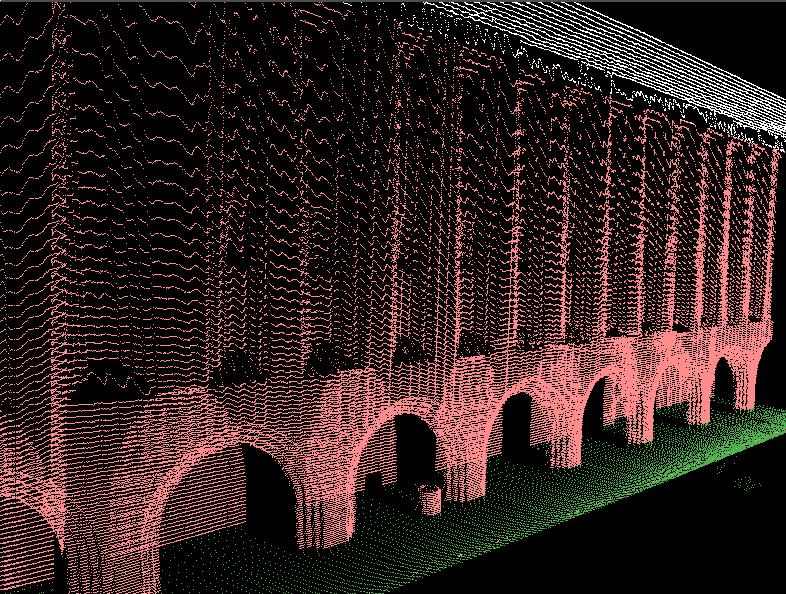
27 CSBC JAI # 53 Fundamentos Outras Representações para Mapas 3D # 54 27


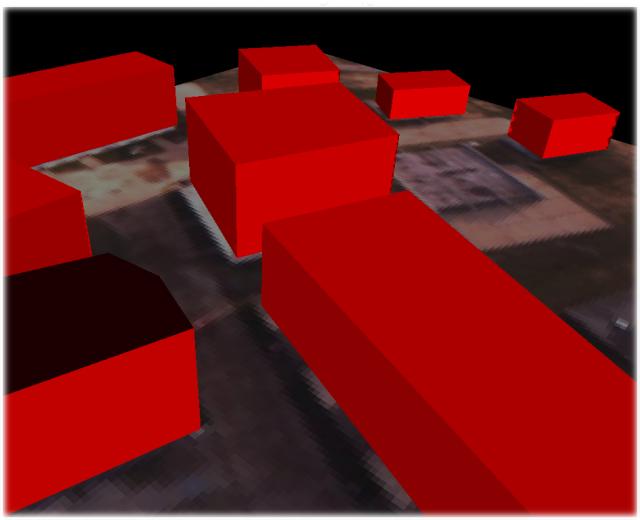

28 Mapas 3D # 55 Veículos Autônomos # 56 28



29 DARPA Grand Challenge 2004 Premio de US$ ,00 Desafio: Percorrer 224km no deserto de forma autônoma 106 equipes inscritas e 25 finalistas Melhor resultado: Red team (12km) Nobody won. Nobody even came close -CNN # 57 Veículos Autônomos - Desafios # 58 29




 6h 53m")
30 DARPA Grand Challenge 2005 Premio de US$ , equipes inscritas, 23 finalistas 5 terminaram o percurso Vencedor: Stanley (Stanford University) 6h 53m # 59 DARPA Urban Challenge 2007 # 60 30

31 DARPA Resultados none of the winning teams had taken any demerits for traffic violations, and that the winners had all been selected based on their finishing times Tartan's vehicle averaged about 14 miles per hour throughout the course, which covered about 55 miles. Stanford averaged about 13 miles per hour, and Virginia Tech averaged a bit less than that # 61 DARPA Vencedor Junior NOVA Equipe campeã TARTAN Racing # 62 31





32 Veículo Autônomo - LRM Veículo instrumentado para aquisição de dados # 63 Veículo Autônomo USP/SC # 64 32




33 Veículo Autônomo USP/SC # 65 Veículo Autônomo - LRM Navegação baseada em mapeamento a laser # 66 33







34 Veículo Autônomo - LRM # 67 Navegação Visual Veículo Autônomo - LRM Sensors INCT-SEC IP addresses and the Camera port numbers of the Autonomous components. GPS, IMU, and compass Electric Vehicle Laser Range Finders Actuators DC Motor Encoder Motor Controller Acceleration Control Specifications Engine: electric 48v Autonomy: 8-10hs Max speed: 32km/h Payload: 363kg # 68 34



35 Veículo Autônomo - LRM Autonomous Navigation * IP addresses and the port numbers of the components. Vision-based obstacle avoidance GPS-based Autonomous navigation # 69 * J. Souza, D. Sales, P. Shinzato, F. Osório and D. Wolf, Template-based autonomous navigation in urban environments, In ACM Applied Computing Sysposium, 2011 Veículo Autônomo - LRM Autonomous Navigation * IP addresses and the port numbers of the components. Vision-based obstacle avoidance Vídeos: GPS-based Autonomous navigation # 70 * J. Souza, D. Sales, P. Shinzato, F. Osório and D. Wolf, Template-based autonomous navigation in urban environments, In ACM Applied Computing Sysposium,
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Programação. Robô Guia em Museu. Robôs Móveis - Aplicações. Oportunidade de: IP addresses and the port numbers of the components. Avaliação.
 SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
SLAM II Localização e Mapeamento Simulatâneos
 SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
15/05/2013. Localização I. Localização. Localização: classificação. Localização: classificação. Tipo de ambiente. Ambiente dinâmico - soluções
 SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
26/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móve Inteigente: Da Simuação às Apicações no Mundo Rea Denis Fernando Wof Universidade de São Pauo USP - ICMC Eduardo do Vae Simões Grupo de Sist. Embarcados, Evoutivos e Robóticos Fernando Santos
Robótica Móve Inteigente: Da Simuação às Apicações no Mundo Rea Denis Fernando Wof Universidade de São Pauo USP - ICMC Eduardo do Vae Simões Grupo de Sist. Embarcados, Evoutivos e Robóticos Fernando Santos
Assim, a rápida acumulação de erros pequenos pode causar o fracasso de quase todos os métodos para resolver o problema de SLAM.
 1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros Sistemas de Localização Bibliografia Recomendada
 Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Introdução ao LabVIEW para Robótica
 Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Robótica Móvel. Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Robótica Móvel Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 21/05/2018 Robôs móveis Robôs móveis são capazes de locomover-se no ambiente em que estão
Robótica Móvel Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 21/05/2018 Robôs móveis Robôs móveis são capazes de locomover-se no ambiente em que estão
Mapeamento robótico. Mapeamento semântico. Metodologia. Maquinas de vetores de suporte. Maquinas de vetores de suporte. Modelos ocultos de Markov
 Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Departamento de Engenharia - Universidade Federal de Lavras
 Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Introdução. Introdução Exemplo. Introdução. Representação do Ambiente Exemplo. Representação do Ambiente. Mapeamento e Localização Simultâneos
 Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
7 Experimentos. Figura 2 Sensor Inercial (Xsens) Figura 3 Sensor GPS (Garmin) Figura 1 Robô Ambiental Híbrido
 Figura 3 Sensor GPS (Garmin) Figura 1 Robô Ambiental Híbrido") 7 Experimentos Foram realizados dois experimentos distintos com o sensor GPS da marca Garmin e o sensor inercial da marca Xsens, Fig. 83 e 84 respectivamente: Na floresta amazônica, onde os sensores foram
7 Experimentos Foram realizados dois experimentos distintos com o sensor GPS da marca Garmin e o sensor inercial da marca Xsens, Fig. 83 e 84 respectivamente: Na floresta amazônica, onde os sensores foram
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Pesquisa Científica Diferentes Áreas, Inúmeras Descobertas
 Pesquisa Científica Diferentes Áreas, Inúmeras Descobertas Profa. Dra. Kalinka Castelo Branco ICMC-USP Slides baseados nos slides da Profa. Patrícia Tedesco, Prof. Denis Wolf, Prof. Fernando Osório, Prof.
Pesquisa Científica Diferentes Áreas, Inúmeras Descobertas Profa. Dra. Kalinka Castelo Branco ICMC-USP Slides baseados nos slides da Profa. Patrícia Tedesco, Prof. Denis Wolf, Prof. Fernando Osório, Prof.
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel. João Alberto Fabro André Schneider de Oliveira PPGCA/UTFPR
 Robótica Móvel João Alberto Fabro (fabro@utfpr.edu.br) André Schneider de Oliveira (andreoliveira@utfpr.edu.br) PPGCA/UTFPR Parte 1 Introdução e Histórico O que é Robótica? Conceitos Básicos Robótica Móvel
Robótica Móvel João Alberto Fabro (fabro@utfpr.edu.br) André Schneider de Oliveira (andreoliveira@utfpr.edu.br) PPGCA/UTFPR Parte 1 Introdução e Histórico O que é Robótica? Conceitos Básicos Robótica Móvel
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
IA Robótica Móvel II - Locomoção e Localização
 Planejamento para IA Robótica Móvel II - e Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 23 de Novembro de 2010 1 /
Planejamento para IA Robótica Móvel II - e Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 23 de Novembro de 2010 1 /
Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada. EESC-USP M. Becker /78
 Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA
 ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc.
 baseados em inteligência Artificial MSc.") Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1 Roteiro
Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1 Roteiro
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
IA368-W Métodos Estocásticos em Robótica Móvel
 IA368-W Métodos Estocásticos em Robótica Móvel Prof. Eleri Cardoo Prof. Eric Rohmer Colaboradores: Leonardo R. Olivi Paulo G. Pinheiro Ricardo S. Soua Fernando C.A. Pinho MAPEAMENTO DE AMBIENTES é o processo
IA368-W Métodos Estocásticos em Robótica Móvel Prof. Eleri Cardoo Prof. Eric Rohmer Colaboradores: Leonardo R. Olivi Paulo G. Pinheiro Ricardo S. Soua Fernando C.A. Pinho MAPEAMENTO DE AMBIENTES é o processo
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO
 UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO Alan Porto Bontempo, Marley Vellasco e Karla Figueiredo* Pontifícia Universidade
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO Alan Porto Bontempo, Marley Vellasco e Karla Figueiredo* Pontifícia Universidade
1 Introdução 1.1. Motivação
 1 Introdução 1.1. Motivação O crescimento e popularização da robótica têm se evidenciado nos últimos anos principalmente com a explosão da automação industrial, comercial e residencial, além do aparecimento
1 Introdução 1.1. Motivação O crescimento e popularização da robótica têm se evidenciado nos últimos anos principalmente com a explosão da automação industrial, comercial e residencial, além do aparecimento
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
IA Robótica Móvel I - Introdução
 IA I - Introdução Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 18 de Novembro de 2010 1 / 38 http://www.ic.unicamp.br/
IA I - Introdução Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 18 de Novembro de 2010 1 / 38 http://www.ic.unicamp.br/
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Mapeamento. IA368-W Métodos Estocásticos em Robótica Móvel. Profs. Eleri Cardozo Eric Rohmer FEEC/Unicamp
 IA368-W Métodos Estocásticos em Robótica Móvel Profs. Eleri Cardoo Eric Rohmer FEEC/Unicamp Colaboradores: Leonardo Olivi Ricardo Soua Fernando Pinho é o processo pelo qual o robô, utiliando seus sensores
IA368-W Métodos Estocásticos em Robótica Móvel Profs. Eleri Cardoo Eric Rohmer FEEC/Unicamp Colaboradores: Leonardo Olivi Ricardo Soua Fernando Pinho é o processo pelo qual o robô, utiliando seus sensores
Implementação do Filtro de Kalman Estendido
 UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 27 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Localização É um componente essencial para um robô ser completamente
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 27 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Localização É um componente essencial para um robô ser completamente
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Estimativa de Posição 3D de Obstáculos para VANTs
 Estimativa de Posição 3D de Obstáculos para VANTs Rodolfo Barros Chiaramonte, Kalinka Regina Lucas Jaquie Castelo Branco Institute of Mathematics and Computing Sciences (ICMC) University of São Paulo (USP),
Estimativa de Posição 3D de Obstáculos para VANTs Rodolfo Barros Chiaramonte, Kalinka Regina Lucas Jaquie Castelo Branco Institute of Mathematics and Computing Sciences (ICMC) University of São Paulo (USP),
Jeferson André Bigheti NAVEGAÇÃO DE ROBÔS EM AMBIENTES INTERNOS USANDO SLAM
 Jeferson André Bigheti NAVEGAÇÃO DE ROBÔS EM AMBIENTES INTERNOS USANDO SLAM BAURU 2011 Jeferson André Bigheti NAVEGAÇÃO DE ROBÔS EM AMBIENTES INTERNOS USANDO SLAM Dissertação apresentada à Faculdade de
Jeferson André Bigheti NAVEGAÇÃO DE ROBÔS EM AMBIENTES INTERNOS USANDO SLAM BAURU 2011 Jeferson André Bigheti NAVEGAÇÃO DE ROBÔS EM AMBIENTES INTERNOS USANDO SLAM Dissertação apresentada à Faculdade de
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
PERÍODO LETIVO ENGENHARIA DE COMPUTAÇÃO
 1 O SEMESTRE DE 2018 1 o PERÍODO LETIVO SMA0300 Geometria Analítica SMA0300 Geometria Analítica SSC0600 Introdução à Ciência da Computação I 7600109 Laboratório Física Geral I - Turmas aulas quinzenais
1 O SEMESTRE DE 2018 1 o PERÍODO LETIVO SMA0300 Geometria Analítica SMA0300 Geometria Analítica SSC0600 Introdução à Ciência da Computação I 7600109 Laboratório Física Geral I - Turmas aulas quinzenais
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Figura 4.2: Matriz Curricular
 Figura 4.2: Matriz Curricular 3660 Fundamentos de Matemática e Estatística Física Eletrônica Algoritmos e Programação Arquitetura de Computadores Metodologias e Técnicas de Computação Engenharia e Sistemas
Figura 4.2: Matriz Curricular 3660 Fundamentos de Matemática e Estatística Física Eletrônica Algoritmos e Programação Arquitetura de Computadores Metodologias e Técnicas de Computação Engenharia e Sistemas
1 Introdução Origens
 Introdução 13 1 Introdução 1.1. Origens A biologia trouxe através dos anos inúmeras formas de controle primitivo, que num contexto ambiental geram resultados complexos e eficientes. A inspiração para o
Introdução 13 1 Introdução 1.1. Origens A biologia trouxe através dos anos inúmeras formas de controle primitivo, que num contexto ambiental geram resultados complexos e eficientes. A inspiração para o
Tipos de Robôs. Tipos de Robôs. Tipos de Robôs. Percepção Decisão Tipo de Mobilidade
 30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
Inteligência Artificial Agentes Inteligentes
 Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Protótipo de um robô rastreador de objetos. Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer
 Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Uma Abordagem Híbrida para Localização e Mapeamento Simultâneos para Robôs Móveis com Sonares Através de Filtro de Kalman Estendido
 Alan Porto Bontempo Uma Abordagem Híbrida para Localização e Mapeamento Simultâneos para Robôs Móveis com Sonares Através de Filtro de Kalman Estendido Dissertação de Mestrado Dissertação apresentada ao
Alan Porto Bontempo Uma Abordagem Híbrida para Localização e Mapeamento Simultâneos para Robôs Móveis com Sonares Através de Filtro de Kalman Estendido Dissertação de Mestrado Dissertação apresentada ao
Análise e implementação de algoritmos para localização e mapeamento de robôs móveis baseada em computação reconfigurável
 SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: / / Assinatura : Análise e implementação de algoritmos para localização e mapeamento de robôs móveis baseada em computação reconfigurável Marcelo
SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: / / Assinatura : Análise e implementação de algoritmos para localização e mapeamento de robôs móveis baseada em computação reconfigurável Marcelo
23/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
R bó b ti t ca M M vel I nt n e t ligent n e t : D S i S mul u ação à s A p A l p icações n o n
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
CRÉDITOS DO CURSO. Carga Horária Créditos IN1030 Seminários 30 2
 UNIVERSIDADE FEDERAL DE PERNAMBUCO PRÓ-REITORIA PARA ASSUNTOS DE PESQUISA E PÓS-GRADUAÇÃO ESTRUTURA CURRICULAR STRICTO SENSU (baseada na Res. 10/2008 do CCEPE) NOME DO CURSO: Pós-Graduação em Ciência da
UNIVERSIDADE FEDERAL DE PERNAMBUCO PRÓ-REITORIA PARA ASSUNTOS DE PESQUISA E PÓS-GRADUAÇÃO ESTRUTURA CURRICULAR STRICTO SENSU (baseada na Res. 10/2008 do CCEPE) NOME DO CURSO: Pós-Graduação em Ciência da
Simulação de Robôs Móveis e Articulados: Aplicações e Prática. Fernando Santos Osório Rafael Alceste Berri
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
1º Período. Horário Início Término CAD103 ADMINISTRAÇÃO TGA ALGORITMOS E ESTRUTURAS DE DADOS III
 CAD103 DCC003 ADMINISTRAÇÃO TGA ALGORITMOS E ESTRUTURAS DE DADOS I DCC044 FUNDAMENTOS DE SISTEMAS DE INFORMAÇÃO 6ª MAT001 MAT038 6ª DCC004 DCC111 ALGORITMOS E ESTRUTURAS DE DADOS II MATEMÁTICA DISCRETA
CAD103 DCC003 ADMINISTRAÇÃO TGA ALGORITMOS E ESTRUTURAS DE DADOS I DCC044 FUNDAMENTOS DE SISTEMAS DE INFORMAÇÃO 6ª MAT001 MAT038 6ª DCC004 DCC111 ALGORITMOS E ESTRUTURAS DE DADOS II MATEMÁTICA DISCRETA
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2010 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2010 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p ,
 Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Este capítulo descreve os testes realizados para validar a teoria proposta pela presente dissertação.
 6 Simulações Este capítulo descreve os testes realizados para validar a teoria proposta pela presente dissertação. 6.1. Descrição da Simulação Visando validar o equacionamento desenvolvido no Capítulo
6 Simulações Este capítulo descreve os testes realizados para validar a teoria proposta pela presente dissertação. 6.1. Descrição da Simulação Visando validar o equacionamento desenvolvido no Capítulo