Pesquisa Científica Diferentes Áreas, Inúmeras Descobertas
|
|
|
- Walter Affonso de Carvalho
- 7 Há anos
- Visualizações:
Transcrição
1 Pesquisa Científica Diferentes Áreas, Inúmeras Descobertas Profa. Dra. Kalinka Castelo Branco ICMC-USP Slides baseados nos slides da Profa. Patrícia Tedesco, Prof. Denis Wolf, Prof. Fernando Osório, Prof. Onofre, dentre outros 300 pesquisadores envolvidos nos trabalhos mencionados nesta apresentação.

2 Agenda O Processo de Pesquisa Pesquisa e Desenvolvimento Tipos de Pesquisa Oportunidades Áreas e Descobertas 2

3 Para que Pesquisa? Pesquisa como produtora de inovação Viabiliza o crescimento sustentável Aumentando produtividade e competitividade Gerando investimento, emprego e renda Serve para... Criar novos artefatos Explorar o desconhecido Controlar a natureza Entender os sistemas 3

4 E como eu decido pesquisar? Duas motivações... Intelectual Melhorar a qualidade de vida, oportunizando aprendizado Econômica Não precisa ficar pobre para ser pesquisador! Economias Baseadas no conhecimento! Brasil incentiva publicação mais não produtos... SERÁ... Qual a realidade hoje? Cultura de Pesquisa como geradora de Riquezas!!! 4

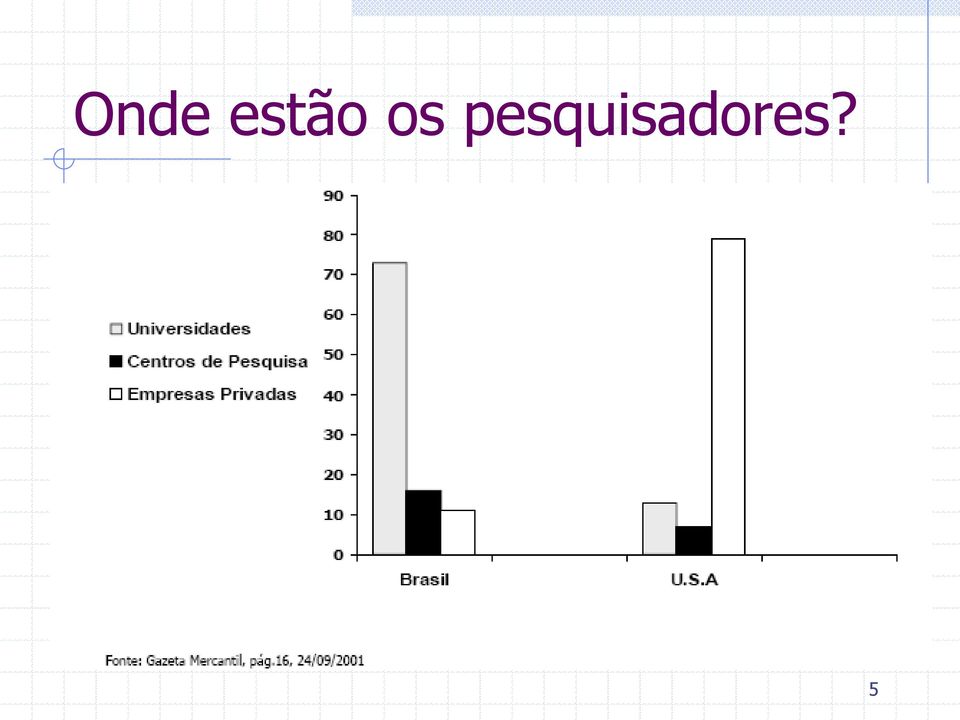
5 Onde estão os pesquisadores? 5
6

7 Assim... Universidade como formadora de pesquisadores... Significa... Saber Organizar Diferenciar Obter Produzir Novos conhecimentos... 7

8 Então... Pesquisa e Desenvolvimento são o que?? Pesquisa Ferramenta para obtenção de Novos conhecimentos Desenvolvimento Aplicação destes conhecimentos para produção de artefatos 8

9 Pesquisa... Processo realizado para Responder a uma questão Resolver um ou vários problemas Satisfazer a uma necessidade, criar, inventar. Em resumo... É um conjunto de investigações, operações e trabalhos intelectuais ou práticos, que objetiva descobrir novos conhecimentos, inventar novas técnicas e explorar ou criar novas realidades 9

10 E estas pesquisas... A necessidade de conhecer, faz a história de nossos avanços e fracassos elementos formadores de cultura. Este conjunto é uma referência organizada das conquistas da humanidade. A pesquisa nos traz presentes e desafios... A gente aqui já faz pesquisa! E ciência... 10

11 A Pesquisa Acadêmica Revê as conquistas da humanidade. Conteúdos precisam ser criticados e aprimorados! Desperta o espírito de busca intelectual... Vamos saber fazer as perguntas relevantes... E encontrar respostas interessantes! 11

12 A Pesquisa de Ponta Caracteriza-se como a atividade do indivíduo que... Tendo dominado as respostas comuns, parte para a busca do novo... Mas Isto deve ser feito com uma intenção específica, com método! E tem só um tipo de pesquisa? 12

13 Tipos de Pesquisa Científica Pesquisa Científica: Toda atividade de pesquisa que utilizar o método científico Podem gerar conhecimento Intelectual Em forma de novos produtos, processos e conhecimentos resultantes 13

14 Pesquisa Científica Quanto à natureza Pesquisa Básica Pesquisa Aplicada Quanto aos objetivos Pesquisa Exploratória Pesquisa Descritiva Pesquisa Explicativa Quanto aos procedimentos Pesquisa Experimental Pesquisa Operacional Estudo de Caso Pesquisa em Laboratório e/ou Pesquisa em Campo 14

15 Pesquisa Quanto à Natureza Pesquisa Científica Quanto à natureza Pesquisa Básica ou Fundamental Gera conhecimentos sem finalidades imediatas Conhecimentos utilizados em pesquisa aplicada Pesquisa Aplicada Gera produtos, processos + Conhecimentos com finalidade imediata Melhoria da Qualidade de Vida 15

16 Principais Características Pesquisa Básica Visa entender ou descobrir novos fenômenos Gera conhecimentos básicos Não é reservada Requer a divulgação dos conhecimentos Produz artigos científicos Pesquisa Tecnológica Visa aplicar conhecimentos básicos Pode ou não ser reservada Produz produtos, processos e patentes Gera novas tecnologias e conhecimentos 16

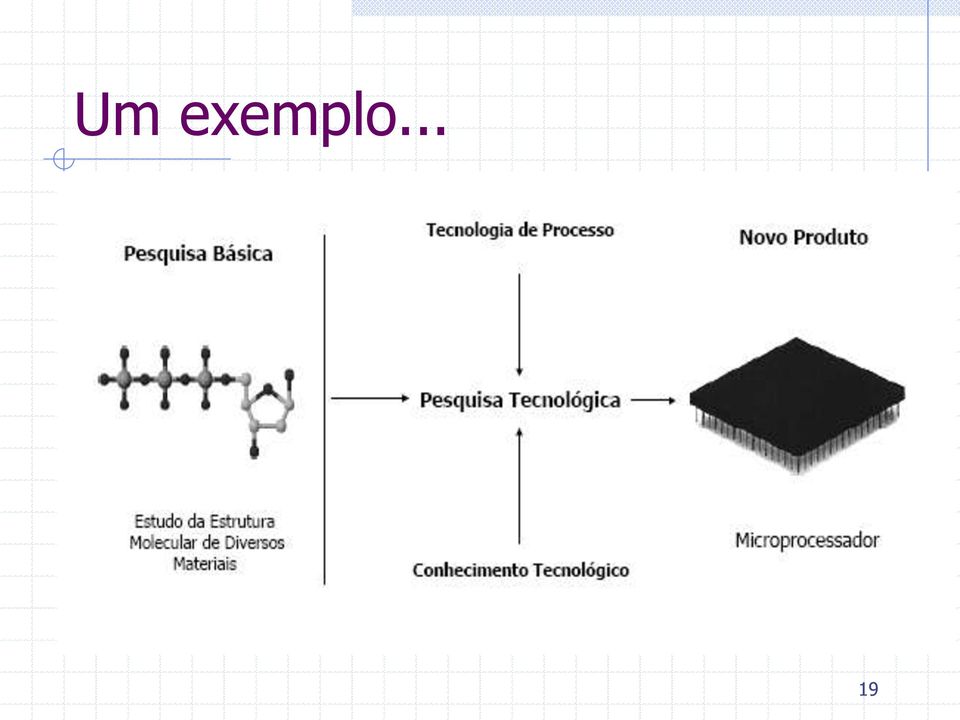
17 A Pesquisa Básica Fundamental para obtenção de conhecimentos elementares Novos elementos químicos Novas fontes de energia Estudos teóricos para relacionar dados são importantíssimos! Na Computação Novas linguagens e SOs 17

18 Pesquisa Tecnológica Utiliza conhecimentos básicos, tecnológicos e tecnologias para gerar novos produtos Conhecimentos envolvidos podem ser de outras áreas Na computação: produção de software. 18

19 Um exemplo... 19
20 Pesquisa quanto aos Objetivos Pesquisas Exploratórias Visam descobrir teorias e práticas que modificarão as existentes; criar maior familiaridade com os fenômenos Obtenção de inovações tecnológicas Normalmente exigem experimentações, que acarretam achados e elucidações de fenômenos. Quase sempre feitas com levantamento bibliográfico, entrevistas, pesquisas web... 20

21 Pesquisas quanto aos Objetivos Pesquisas Descritivas Acontecem após a pesquisa Exploratória. Objetivam observar, registrar e analisar os fenômenos (com que freqüência acontecem, que estrutura têm, como funcionam) Implicam na realização de observação sistemática e não participante. 21
22 Pesquisas quanto aos Objetivos Pesquisas Explicativas Visam ampliar generalizações, definir leis estruturar e definir modelos, relacionar hipóteses existentes e gerar novas via dedução Exigem maior investimento na síntese, teorização e reflexão sobre o objeto 22
23 Ainda sobre Pesquisas Explicativas Explicam os porquês Exigem aplicação de métodos de modelagem e simulação para reproduzir fenômenos Utilizam amplamente estudos de caso 23
24 Pesquisa quanto aos Procedimentos 1. Entender a natureza da pesquisa 2 Determinar o Objetivo da Pesquisa 3. Escolher o Procedimento de Execução Pesquisa Experimental Pesquisa Operacional Estudo de Caso 24
25 Pesquisa Experimental Viabiliza novas descobertas: materiais, componentes, métodos, técnicas Usada para obter novos conhecimentos e protótipos Requer manipulação e coleta de dados imparcial Inovações geradas a partir de estudos de laboratório, os experimentos Experimentar significa: elaborar e formular novos elementos, testar materiais e componentes, simular eventos, inferir e introduzir variáveis, realizar modelagens. 25
26 Pesquisa Operacional Investigação sistemática dos processos de produção Usa ferramentas estatísticas e métodos matemáticos Visa selecionar os meios para produção, comparando custos, eficiência e valores Algumas aplicações Controle e produção de estoques Processos e operações de manufatura Projeto e desenvolvimento de produtos Engenharia e manutenção de fábricas Administração de RH Gestão e Vendas 26
27 Estudo de Caso Possibilitam que se explique um sistema em seu ambiente. Um caso pode ser... Uma decisão, Um programa Um processo de implantação 27
28 Pesquisa segundo as fontes de Informação Pesquisa de Campo Vai observar o lugar natural onde ocorrem os fenômenos. Procedimentos de coleta: observações, entrevistas, etc. Pesquisa de Laboratório Artificializa a produção do fato ou da sua leitura Bibliografia Deve encabeçar qualquer processo de busca que se inicie! 28
29 Oportunidades Diferentes Áreas Desenvolvimento de Software; Engenharia de Software; Redes de Computadores; Segurança; Inteligência Artificial; Banco de Dados; Processamento de Imagens; Hardware, entre outras. 29
30 Inúmeras Descobertas O que posso fazer e pesquisar? O que consigo pensar em descobrir? Como posso fazer isso? Quais são as descobertas a serem feitas? 30
31 Parts of Tiriba s Feature Model 31
32 Parts of Tiriba s Feature Model 32
33 Part of Tiriba s Feature Model Examples of constraints among features 33
34 Tiriba s Product Line Architecture Communication System Navigation System Flight Control System Actuators Payload Navigation & Flight Sensors Propulsion System Photo Camera GPS Optical Measument Unit Motor Camcorder Angular Speed 3D Static Pressure Speed Controller Video RGB Acceleration 3D Differential Pressure Main Battery Video Thermal Video Transmitter Magnetic Field 3D Inertial Unit Temperature Barometric Unit Sensors: Voltage, Current RPM, Temperature Charge Level Airframe Ground Control Station Launch/Recovery Systems 34
35 Tiriba Logic block and Corresponding Automatically Generated Code 35
36 36
37 GT1 Robôs Táticos (Indoor) Um dos principais focos de nossa pesquisa é o desenvolvimento de robôs de serviço usados em tarefas de patrulhamento de ambientes internos através de tele-operação e navigação autônoma: Detecção e resposta a incidentes Câmera Térmica (Far IR): (a) Imagem colorida normal (b) Imagem térmica (c) Detecção de intrusão Alert: Intrusion (a) (b) (c)
38 GT1 Robôs Táticos (Indoor) Sonares Sensors IP addresses and the port Stereo numbers Cameraof the components. Laser Sensors Wi-Fi Connection Color Camera Thermal Camera FLIR PathFindIR: 320x240 / 720x levels (gray levels) Laser Hokuyo 4 meters 270 degrees Laser SICK LMS 200 Distance: Up to 80 meters 75 Hz / 180 degrees scan

39 GT1 Robôs Táticos (Indoor) IP addresses and the port numbers of the components. Robôs Móveis (i) GPS Garmin Sensores
40 GT1 Robôs Táticos (Indoor) INCT-SEC Tele-Operação IP addresses and the port numbers of the components. Robô móvel controlado remotamente e/ou controlado autônomamente na USP ICMC - São Carlos. Sistema de controle remoto executando na PUC-RS em Porto Alegre (1.300Km distante da USP) Sensor Laser

41 GT1 Robôs Táticos (Indoor) INCT-SEC Semi and Autonomous Robot Control Architecture IP addresses and the port numbers of the components. Mobile robots design and implementation: from virtual simulation to real robots. Published in: Virtual, Interactive and Integrated Product Design a nd Manufacturing for Industrial Innovation Volume: Research in Interactive Design Springer Verlag. Nadeau, Jean-Pierre; Fischer, Xavier (Eds.) 1st Edition., 2011, XII, 146 p. With CD-ROM., ISBN:
 IP addresses and the port numbers of the components.")

42 GT1 Robôs Táticos (Indoor) INCT-SEC Navegação e Monitoramento Interno (videos) IP addresses and the port numbers of the components. Publicações: Visual Navigation System IEEE LARS 2010 Localization and Topological Navigation, Human Detection using Thermal Camera Submitted to CBSEC 2011

43 GT2 Veículos Autônomos O problema...
44 GT2 Veículos Autônomos Motivações Acidentes motivados por imperícia e desatenção Custos materiais e humanos Condições de tráfego Qualidade de vida e aspectos sociais
45 Motivação e Aplicações Brazil: IP addresses Local Problems and the port numbers of the Bad conditions components. and conservation of some roads They didn't tell me this hole could be so huge!!
46 Motivação e Aplicações Brazil: Local Problems IP addresses and the port numbers of the Traffic education components. - Behavior of Pedestrians and Conductors * Respect crosswalks * Use footbridge * Pedestrian * Conductors
47 Motivação e Aplicações Brazil: Local Problems IP addresses and the port numbers of the Traffic education components. - Behavior of Pedestrians and Conductors * Respect crosswalks * Use footbridges * Pedestrian behavior * Conductors behavior Brazilian educational campaign: USE CROSSWALKS!
48 Motivação e Aplicações Brazil: Local Problems IP addresses and the port numbers of the Road Signs: components. drive at night, speed bumps, visibility, Speed Bump: Does it helps?
49 GT2 Veículos Autônomos Desafio IP addresses Veículos and Inteligentes the port numbers com of the Condução Assistida components. Condução Autônoma No Brasil, poucas instituições tem desenvolvido trabalhos nesta direção e o INCT-SEC vem atuando fortemente no desenvolvimento de soluções robustas para esta área.
50 GT2 Veículos Autônomos Sensores INCT-SEC IP addresses and the Camera port numbers of Veículo the Autônomo components. GPS, IMU, and compass Elétrico Laser Range Finders Atuadores DC Motor Encoder Motor Controller Especificações Engine: electric 48v Autonomy: 8-10hs Max speed: 32km/h Payload: 363kg Acceleration Control
51 GT2 Veículos Autônomos INCT-SEC Algoritmo de deteção de Vias IP addresses and the port numbers of the components. Urban Environment Rural Area Rain Night * Shinzato, P. Y. ; Wolf, D. F.. A Road Following Approach Using Artificial Neural Networks Combinations, Journal of Intelligent & Robotic Systems, 2010
52 GT2 Veículos Autônomos INCT-SEC Assisted Driving System IP addresses and the port numbers of the components. Vehicle Position Laser information Expected trajectory Obstacles Camera Image * FERNANDES, L. C. ; OSORIO, F. S. ; Wolf, D. F. ; DIAS, M. A.. A Driving Assistance System for Navigation in Urban Envronments. In: Ibero-American Conference on Artificial Intelligence, 2010
53 GT2 Veículos Autônomos INCT-SEC - Parceiros IP addresses and the port numbers of the components. CTI CENPRA Automated Vehicle Drive-by-Wire and Sensors Fiat Stylo / EESC ICMC SENA Project Assisted Driving

54 GT2 Veículos Autônomos Navegação Autônoma * IP addresses and the port numbers of the components. Vision-based obstacle avoidance GPS-based Autonomous navigation * J. Souza, D. Sales, P. Shinzato, F. Osório and D. Wolf, Template-based autonomous navigation in urban environments, In ACM Applied Computing Sysposium, 2011


55 GT2 Veículos Autônomos Autonomous Navigation * IP addresses and the port numbers of the components. Vision-based obstacle avoidance GPS-based Autonomous navigation * J. Souza, D. Sales, P. Shinzato, F. Osório and D. Wolf, Template-based autonomous navigation in urban environments, In ACM Applied Computing Sysposium, 2011
56 O QUE SIGNIFICA SEGURANÇA??? 56
57 QUANTA SEGURANÇA?? 57
58 Detector de Enchentes
59 Localização dos experimentos
60 Pesquisa corrente Mapa do local de experimentos em São Carlos e o primeiro nó para o projeto REDE
61 GT 3 - Veículos Aéreos Autônomos
62 Projeto Tiriba (2) (1) (2) (3) Parts: (1) on-board system block diagram, (2) the aircraft (3) mission planner
63 Projeto Tiriba Especificações Básicas BASIC SPECIFICATIONS OF TIRIBA AIRCRAFT Propulsion Max Takeoff weight Payload Endurance Cruiser speed Takeoff Landing Missions Ground Station Assembly time Electric, 1.2KW 3 Kg 0.7 Kg 40min/1h30min 100Km/h /60Km/h hand launch/catapult Automatic, parachute Autonomous Smartphone based 10 min
64 Projeto Tiriba Componentes de Hardware (1) (2) Quatro processadores (microcontroladores PIC32 80 MHz ) Parts: (1) on-board system diagram details, (2) Tiriba auto-pilot main board
65 GT 3 - Veículos Aéreos Autônomos Placa do Piloto Automático do Tiriba
66 GT 3 - Veículos Aéreos Autônomos Protótipo do Tiriba em Vôo Teste da Unidade Inercial e Barométrica
67 Placa do Piloto Automático do Tiriba Quatro processadores Processador de missão responsável pela comprimento de missões planejadas (estação de solo); Processador de controle responsável pelo controle de vôo da aeronave (comando da estação base) Os dois últimos implemetam os dois conjuntos de principais de sensores de vôos Unidade inercial integrada a GPS e Medida de campo magnético terrestre cálculo da atitude da aeronave Unidade barométrica responsável pela medição da velocidade aerodinâmica, altitude barométrica e taxa de subida. 67
68 Aquisição de Imagens
69 Tratamento de Imagens - Ortoretificação
70 Tratamento de Imagens - Mosaicagem
71 Aplicações - Agricutura Class % Culture 65,5 Invasive pests 1,2 Straw 7,8 Bare Soil 25,5
72 Aplicações Monitoramento Ambiental
73 Aplicações Monitoramento Ambiental Imagens Sobrepostas VANT e Satélite
74 Aplicações Monitoramento Ambiental Imagens obtidas com o VANT
75 Projeto SarVant Wing load: 47 Kg/m² Dry Weight: 35 Kg Maximum takeoff weight: 120 Kg Paylod: 45 Kg Propulsion: 2 DLE Hp s each Stol speed (flaps on, ISA): 72 Km/h Cruise speed(8000 ft; ISA+10): 200 Km/h Autonomy: 30.5 Horas Cruise range: 6100 Km Rate of climb: 2000 Pés/min Take off and landing distance: 250 m
76 INCT-SEC e RIPSEC Web Sites
77 Laboratório de Sistemas Embarcados Críticos LSEC Lab. de Sistemas Embarcados Críticos Kalinka Castelo Branco - kalinka@icmc.usp.br
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Estimativa de Posição 3D de Obstáculos para VANTs
 Estimativa de Posição 3D de Obstáculos para VANTs Rodolfo Barros Chiaramonte, Kalinka Regina Lucas Jaquie Castelo Branco Institute of Mathematics and Computing Sciences (ICMC) University of São Paulo (USP),
Estimativa de Posição 3D de Obstáculos para VANTs Rodolfo Barros Chiaramonte, Kalinka Regina Lucas Jaquie Castelo Branco Institute of Mathematics and Computing Sciences (ICMC) University of São Paulo (USP),
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Realização. Apoio. Patrocínio
 Realização Apoio Patrocínio Utilização de VANTs na Agricultura no INCT-SEC Prof. Onofre Trindade Jr ICMC/USP Agenda O INCT-SEC Pesquisa em VANTs no INCT-SEC O projeto ARARA VANTs em Desenvolvimento Aplicações
Realização Apoio Patrocínio Utilização de VANTs na Agricultura no INCT-SEC Prof. Onofre Trindade Jr ICMC/USP Agenda O INCT-SEC Pesquisa em VANTs no INCT-SEC O projeto ARARA VANTs em Desenvolvimento Aplicações
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Métodos de Pesquisa MÓDULO 2: TIPOS DE PESQUISA
 MÓDULO 2: TIPOS DE PESQUISA Métodos de Pesquisa A pesquisa compreende qualquer atividade criativa e sistemática realizada com o fim de incrementar o acervo do conhecimento científico e o uso desse acervo
MÓDULO 2: TIPOS DE PESQUISA Métodos de Pesquisa A pesquisa compreende qualquer atividade criativa e sistemática realizada com o fim de incrementar o acervo do conhecimento científico e o uso desse acervo
Fatores de Sucesso na Operação de SisVANTs
 Fatores de Sucesso na Operação de SisVANTs São Paulo, junho 2013 Onofre Trindade Jr ICMC USP otj@icmc.usp.br Sumário Desenvolvimento de SisVANTs no ICMC Arquitetura de um SisVANT Sistemas de Voo Iniciativas
Fatores de Sucesso na Operação de SisVANTs São Paulo, junho 2013 Onofre Trindade Jr ICMC USP otj@icmc.usp.br Sumário Desenvolvimento de SisVANTs no ICMC Arquitetura de um SisVANT Sistemas de Voo Iniciativas
Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc.
 baseados em inteligência Artificial MSc.") Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1 Roteiro
Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1 Roteiro
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
Implementação do controle PID e validação real utilizando a plataforma robótica RoboDeck
 Implementação do controle PID e validação real utilizando a plataforma robótica RoboDeck Leandro Zanolla 1, Daniel Rodrigues de Sousa 1, Wagner Tanaka Botelho 1, Maria das Graças Bruno Marietto 2 e Renan
Implementação do controle PID e validação real utilizando a plataforma robótica RoboDeck Leandro Zanolla 1, Daniel Rodrigues de Sousa 1, Wagner Tanaka Botelho 1, Maria das Graças Bruno Marietto 2 e Renan
Sistema Remoto para Monitoramento de Rodovias. VANTRod
 Sistema Remoto para Monitoramento de Rodovias VANTRod PROPOSTA - Monitoramento de rodovias empregando Veículo Aéreo Não Tripulado (VANT); - Enquanto em voo software embarcado capta imagens georreferenciadas;
Sistema Remoto para Monitoramento de Rodovias VANTRod PROPOSTA - Monitoramento de rodovias empregando Veículo Aéreo Não Tripulado (VANT); - Enquanto em voo software embarcado capta imagens georreferenciadas;
SE A Sistema Embarcado de avegação Autônoma. Agenda. Infos do curso e apresentadores: INCT-SEC, FOG Jogos de Corrida: Histórico, Evolução, Conceitos
 em Jogos e Aplicações de Inteligência Artificial Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Gustavo Pessin Kalinka R.L.J. Castelo Branco USP - Universidade de São Paulo - ICMC LRM
em Jogos e Aplicações de Inteligência Artificial Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Gustavo Pessin Kalinka R.L.J. Castelo Branco USP - Universidade de São Paulo - ICMC LRM
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Sistema VANT. Projecto MASP
 Sistema VANT Projecto MASP 2004-2005 Outline Introdução Fases do projecto Systems engineering Requisitos do utilizador Formação equipas (empresas projecto) Avaliação 2 Projecto Veículo áereo não tripulado
Sistema VANT Projecto MASP 2004-2005 Outline Introdução Fases do projecto Systems engineering Requisitos do utilizador Formação equipas (empresas projecto) Avaliação 2 Projecto Veículo áereo não tripulado
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas
 Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Simulação de Robôs Móveis e Articulados: Aplicações e Prática. Fernando Santos Osório Rafael Alceste Berri
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
Cursos da Escola de Engenharias e Ciências Exatas - UnP
 Cursos da Escola de Engenharias e Ciências Exatas - UnP Professor Nielsen Castelo Damasceno E-mail: nielsen.castelo@unp.br Web: http://ncdd.com.br Sala Virtual Disciplina Visão Computacional (CH Total
Cursos da Escola de Engenharias e Ciências Exatas - UnP Professor Nielsen Castelo Damasceno E-mail: nielsen.castelo@unp.br Web: http://ncdd.com.br Sala Virtual Disciplina Visão Computacional (CH Total
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Uso de Aeronaves Remotamente Pilotadas (Drones) na PETROBRAS
 na PETROBRAS") Uso de Aeronaves Remotamente Pilotadas (Drones) na PETROBRAS Painel: Drones João Luiz Bullos Santos CENPES/PDDP/TEO e-mail: bullos@petrobras.com.br XVII Seminário Nacional de Telecomunicações APTEL / PETROBRAS
Uso de Aeronaves Remotamente Pilotadas (Drones) na PETROBRAS Painel: Drones João Luiz Bullos Santos CENPES/PDDP/TEO e-mail: bullos@petrobras.com.br XVII Seminário Nacional de Telecomunicações APTEL / PETROBRAS
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Metodologia Científica e Tecnológica
 Metodologia Científica e Tecnológica Classificação e Métodos Científicos Prof. M.Sc. Gustavo Meireles 2014 Gustavo S. C. Meireles 1 Tipologias de pesquisa científica 2014 Gustavo S. C. Meireles 2 Quanto
Metodologia Científica e Tecnológica Classificação e Métodos Científicos Prof. M.Sc. Gustavo Meireles 2014 Gustavo S. C. Meireles 1 Tipologias de pesquisa científica 2014 Gustavo S. C. Meireles 2 Quanto
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Programação. Robô Guia em Museu. Robôs Móveis - Aplicações. Oportunidade de: IP addresses and the port numbers of the components. Avaliação.
 SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Realização. Apoio. Patrocínio
 Realização Apoio Patrocínio Inspeção de Linhas de Transmissão e Oleodutos Utilizando VANTs Eng. Me. Giovani Amianti São José dos Campos 28 de Outubro de 2010 Agenda A Aplicação A necessidade do setor de
Realização Apoio Patrocínio Inspeção de Linhas de Transmissão e Oleodutos Utilizando VANTs Eng. Me. Giovani Amianti São José dos Campos 28 de Outubro de 2010 Agenda A Aplicação A necessidade do setor de
RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO
 RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO 1. CATEGORIA ENGENHARIA 1.2 - CAMPOS DE ATUAÇÃO PROFISSIONAL DA MODALIDADE ELÉTRICA 1.2.1 Eletricidade Aplicada e Equipamentos Eletroeletrônicos
RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO 1. CATEGORIA ENGENHARIA 1.2 - CAMPOS DE ATUAÇÃO PROFISSIONAL DA MODALIDADE ELÉTRICA 1.2.1 Eletricidade Aplicada e Equipamentos Eletroeletrônicos
INDÚSTRIA % O CEARÁ E A INDÚSTRIA % das grandes empresas já utilizam O CEARÁ E A INDÚSTRIA 4.0
 O CEARÁ E A INDÚSTRIA 4.0 INDÚSTRIA 4.0 Julho de 2017 www.sfiec.org.br A INDÚSTRIA 4.0 refere-se à convergência e aplicação de diversas industriais, entre elas: Robótica Avançada, Manufatura Aditiva, Big
O CEARÁ E A INDÚSTRIA 4.0 INDÚSTRIA 4.0 Julho de 2017 www.sfiec.org.br A INDÚSTRIA 4.0 refere-se à convergência e aplicação de diversas industriais, entre elas: Robótica Avançada, Manufatura Aditiva, Big
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1
 ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
Tecnologias Drones Aplicadas a Inspeção e Monitoramento de Estruturas
 Tecnologias Drones Aplicadas a Inspeção e Monitoramento de Estruturas Eng. Luiz Dalbelo Novembro, 2016 VANT? Drone? RPAS? Qual nomenclatura utilizar? Portabilidade Muito leve, apenas 630g. Asas removíveis.
Tecnologias Drones Aplicadas a Inspeção e Monitoramento de Estruturas Eng. Luiz Dalbelo Novembro, 2016 VANT? Drone? RPAS? Qual nomenclatura utilizar? Portabilidade Muito leve, apenas 630g. Asas removíveis.
TÍTULO: DEFINIÇÃO DE PARÂMETROS PARA ANÁLISE DE AERONAVES REMOTAMENTE PILOTADAS (RPA)
") TÍTULO: DEFINIÇÃO DE PARÂMETROS PARA ANÁLISE DE AERONAVES REMOTAMENTE PILOTADAS (RPA) CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: UNIVERSIDADE ANHEMBI MORUMBI
TÍTULO: DEFINIÇÃO DE PARÂMETROS PARA ANÁLISE DE AERONAVES REMOTAMENTE PILOTADAS (RPA) CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: UNIVERSIDADE ANHEMBI MORUMBI
Engenharia de Software para Sistemas Embarcados
 Engenharia de Software para Sistemas Embarcados (Introdução) Prof. Julio Arakaki (jarakaki@pucsp.br) Depto. de Computação Faculdade de Ciências Exatas e Tecnologia Pontifícia Universidade Católica de São
Engenharia de Software para Sistemas Embarcados (Introdução) Prof. Julio Arakaki (jarakaki@pucsp.br) Depto. de Computação Faculdade de Ciências Exatas e Tecnologia Pontifícia Universidade Católica de São
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
DISCIPLINAS DOS CERTIFICADOS DE ESTUDOS ESPECIAIS
 Relação das disciplinas necessárias para obtenção de certificado de estudos especiais em: Controle e automação; Engenharia automobilística; Engenharia biomédica; Engenharia de estruturas; Engenharia de
Relação das disciplinas necessárias para obtenção de certificado de estudos especiais em: Controle e automação; Engenharia automobilística; Engenharia biomédica; Engenharia de estruturas; Engenharia de
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Departamento de Engenharia - Universidade Federal de Lavras
 Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Robô Móvel Colaborativo
 Lançamento Modernize seu processo produtivo Robô Móvel Colaborativo O Robô Móvel Colaborativo da Omron é um Veículo Autônomo Inteligente (AIV) projetado para aumentar a produtividade em processos industriais
Lançamento Modernize seu processo produtivo Robô Móvel Colaborativo O Robô Móvel Colaborativo da Omron é um Veículo Autônomo Inteligente (AIV) projetado para aumentar a produtividade em processos industriais
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Tele-Operated and Autonomous Mobile Robots
 Tele-Operated and Autonomous Mobile Robots OSORIO, Fernando; WOLF, Denis; SIMOES, Eduardo 1 PESSIN, Gustavo; FERNANDES, Leandro 1 HATA, Alberto; SHINZATO, Patrick; DIAS, Mauricio; COUTO, Leandro 1 1 Instituto
Tele-Operated and Autonomous Mobile Robots OSORIO, Fernando; WOLF, Denis; SIMOES, Eduardo 1 PESSIN, Gustavo; FERNANDES, Leandro 1 HATA, Alberto; SHINZATO, Patrick; DIAS, Mauricio; COUTO, Leandro 1 1 Instituto
Motivação para o estudo de IA
 Motivação para o estudo de IA Aula #3.1 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Motivação para o estudo de IA Aula #3.1 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Robôs de Serviços. Pedro U. Lima. Instituto Superior Técnico Universidade Técnica de Lisboa Portugal. Portfólio
 Robôs de Serviços Pedro U. Lima Instituto Superior Técnico Universidade Técnica de Lisboa Portugal 1 Tópicos Exemplos de Robôs Sistemas Componentes de Robôs e Relação com Outras Áreas da EEC Cooperação
Robôs de Serviços Pedro U. Lima Instituto Superior Técnico Universidade Técnica de Lisboa Portugal 1 Tópicos Exemplos de Robôs Sistemas Componentes de Robôs e Relação com Outras Áreas da EEC Cooperação
Motivação para o estudo de IA
 Motivação para o estudo de IA Aula #1.2 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Motivação para o estudo de IA Aula #1.2 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p ,
 Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
APLICAÇÃO DE TESTES UTILIZANDO LÓGICA CLÁSSICA NA PROGRAMAÇÃO DE PLATAFORMA ROBÓTICA MÓVEL
 APLICAÇÃO DE TESTES UTILIZANDO LÓGICA CLÁSSICA NA PROGRAMAÇÃO DE PLATAFORMA ROBÓTICA MÓVEL Thomas Massaru Okuyama[PIBIC] 1, Márcio Mendonça[Orientador] 2, Keriton Lopes [Colaborador] 3 1 Programa Institucional
APLICAÇÃO DE TESTES UTILIZANDO LÓGICA CLÁSSICA NA PROGRAMAÇÃO DE PLATAFORMA ROBÓTICA MÓVEL Thomas Massaru Okuyama[PIBIC] 1, Márcio Mendonça[Orientador] 2, Keriton Lopes [Colaborador] 3 1 Programa Institucional
Computação Bioinspirada: Aplicações
 Computação Bioinspirada: Aplicações Prof. Eduardo do Valle Simões Grupo de Sistemas Embarcados e Evolutivos LCR Laboratório de Computação Reconfigurável Departamento de Sistemas de Computação Projeto de
Computação Bioinspirada: Aplicações Prof. Eduardo do Valle Simões Grupo de Sistemas Embarcados e Evolutivos LCR Laboratório de Computação Reconfigurável Departamento de Sistemas de Computação Projeto de
Controle a Distância de um Barco com Arduino+Bluetooth
 Controle a Distância de um Barco com Arduino+Bluetooth Wagner Y. Nishi [Voluntário PIBIC/UTFPR], Marcio Mendonça [orientador] Coordenação de Engenharia Elétrica Campus Cornélio Procópio Universidade Tecnológica
Controle a Distância de um Barco com Arduino+Bluetooth Wagner Y. Nishi [Voluntário PIBIC/UTFPR], Marcio Mendonça [orientador] Coordenação de Engenharia Elétrica Campus Cornélio Procópio Universidade Tecnológica
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
A profissão do Engenheiro
 { A profissão do Engenheiro (...) o importante papel que a engenharia tem desempenhado ao longo da história da humanidade é evidente. Ela esteve e continua presente em praticamente todos os momentos dessa
{ A profissão do Engenheiro (...) o importante papel que a engenharia tem desempenhado ao longo da história da humanidade é evidente. Ela esteve e continua presente em praticamente todos os momentos dessa
Luciano Fucci.
 Luciano Fucci www.tecnodrone.com.br AEROLEVANTAMENTOS Visão Geral O que preciso saber para fazer aerolevantamento com Drones? www.tecnodrone.com.br AEROLEVANTAMENTO COM DRONES Um conjunto de operações
Luciano Fucci www.tecnodrone.com.br AEROLEVANTAMENTOS Visão Geral O que preciso saber para fazer aerolevantamento com Drones? www.tecnodrone.com.br AEROLEVANTAMENTO COM DRONES Um conjunto de operações
PRÓTESES MECÂNICAS DE BAIXO CUSTO CONTROLADAS POR ESTÍMULOS MUSCULARES
 PRÓTESES MECÂNICAS DE BAIXO CUSTO CONTROLADAS POR ESTÍMULOS MUSCULARES Dyorjenes Henrique A. Santos 1 Matheus Delgado de Azevedo 2 Kesley Roberto Ferreira Silva 3 Thiago Magela Rodrigues Dias 4 Adriano
PRÓTESES MECÂNICAS DE BAIXO CUSTO CONTROLADAS POR ESTÍMULOS MUSCULARES Dyorjenes Henrique A. Santos 1 Matheus Delgado de Azevedo 2 Kesley Roberto Ferreira Silva 3 Thiago Magela Rodrigues Dias 4 Adriano
Clique para editar os estilos do texto mestre
 Clique para editar os estilos do texto mestre Realização Segundo nível Terceiro nível Quarto nível» Quinto nível Organização Brasileira para o Desenvolvimento da Certificação Aeronáutica Apoio Patrocínio
Clique para editar os estilos do texto mestre Realização Segundo nível Terceiro nível Quarto nível» Quinto nível Organização Brasileira para o Desenvolvimento da Certificação Aeronáutica Apoio Patrocínio
Introdução ao LabVIEW para Robótica
 Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
Laboratório de Sistemas Embarcados Crí3cos Robó3ca Aérea. Kalinka Castelo Branco
 Laboratório de Sistemas Embarcados Crí3cos Robó3ca Aérea Kalinka Castelo Branco Obje3vo do Laboratório Contribuição para o progresso e desenvolvimento de sistemas embarcados crí3cos: Colocar inteligência
Laboratório de Sistemas Embarcados Crí3cos Robó3ca Aérea Kalinka Castelo Branco Obje3vo do Laboratório Contribuição para o progresso e desenvolvimento de sistemas embarcados crí3cos: Colocar inteligência
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada. EESC-USP M. Becker /78
 Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Robótica Móvel. João Alberto Fabro André Schneider de Oliveira PPGCA/UTFPR
 Robótica Móvel João Alberto Fabro (fabro@utfpr.edu.br) André Schneider de Oliveira (andreoliveira@utfpr.edu.br) PPGCA/UTFPR Parte 1 Introdução e Histórico O que é Robótica? Conceitos Básicos Robótica Móvel
Robótica Móvel João Alberto Fabro (fabro@utfpr.edu.br) André Schneider de Oliveira (andreoliveira@utfpr.edu.br) PPGCA/UTFPR Parte 1 Introdução e Histórico O que é Robótica? Conceitos Básicos Robótica Móvel
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Definição IHC. Disciplina ou campo de estudo interessada no design, implementação e avaliação de sistemas computacionais interativos para uso humano.
 Introdução à IHC Definição IHC Disciplina ou campo de estudo interessada no design, implementação e avaliação de sistemas computacionais interativos para uso humano. Estudo dos fenômenos associados ao
Introdução à IHC Definição IHC Disciplina ou campo de estudo interessada no design, implementação e avaliação de sistemas computacionais interativos para uso humano. Estudo dos fenômenos associados ao
Tecnologias da Informação Motivações e Avanços
 Tecnologias da Informação Motivações e Avanços Aula #1.2. EBS 211 POO e UML Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Roteiro Dados x Informação; Computadores, Processamento de
Tecnologias da Informação Motivações e Avanços Aula #1.2. EBS 211 POO e UML Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Roteiro Dados x Informação; Computadores, Processamento de
Mineração de Textos na Web
 Mineração de Textos na Web Luciano Antonio Digiampietri Escola de Artes Ciências e Humanidades da Universidade de São Paulo digiampietri@usp.br Resumo: Com o crescimento das informações disponíveis na
Mineração de Textos na Web Luciano Antonio Digiampietri Escola de Artes Ciências e Humanidades da Universidade de São Paulo digiampietri@usp.br Resumo: Com o crescimento das informações disponíveis na
Introdução Geral a Computação Gráfica. Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de Computação Gráfica
 Introdução Geral a Computação Gráfica Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de 2 Introdução Geral a O que é CG? Áreas de Atuação Definição, Arte e Matemática Mercado
Introdução Geral a Computação Gráfica Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de 2 Introdução Geral a O que é CG? Áreas de Atuação Definição, Arte e Matemática Mercado
VEÍCULOS AÉREOS NÃO TRIPULADOS (VANT) NA AGRICULTURA E MEIO AMBIENTE
 NA AGRICULTURA E MEIO AMBIENTE") VEÍCULOS AÉREOS NÃO TRIPULADOS (VANT) NA AGRICULTURA E MEIO AMBIENTE Daniel Gomes Eng. Agrônomo, Dr., PqC do Polo Regional Leste Paulista/APTA daniel.gomes@apta.sp.gov.br Um Veículo Aéreo Não Tripulado
VEÍCULOS AÉREOS NÃO TRIPULADOS (VANT) NA AGRICULTURA E MEIO AMBIENTE Daniel Gomes Eng. Agrônomo, Dr., PqC do Polo Regional Leste Paulista/APTA daniel.gomes@apta.sp.gov.br Um Veículo Aéreo Não Tripulado
Processo Seletivo da Equipe USPDroids
 Processo Seletivo da Equipe USPDroids USPDroids Laboratório de Aprendizado de Robôs - ICMC - USP USPDroids (LAR - ICMC) USPDroids 1 / 37 Introdução Sumário 1 Introdução 2 Visão 3 Estratégia 4 Eletrônica
Processo Seletivo da Equipe USPDroids USPDroids Laboratório de Aprendizado de Robôs - ICMC - USP USPDroids (LAR - ICMC) USPDroids 1 / 37 Introdução Sumário 1 Introdução 2 Visão 3 Estratégia 4 Eletrônica
7 Experimentos. Figura 2 Sensor Inercial (Xsens) Figura 3 Sensor GPS (Garmin) Figura 1 Robô Ambiental Híbrido
 Figura 3 Sensor GPS (Garmin) Figura 1 Robô Ambiental Híbrido") 7 Experimentos Foram realizados dois experimentos distintos com o sensor GPS da marca Garmin e o sensor inercial da marca Xsens, Fig. 83 e 84 respectivamente: Na floresta amazônica, onde os sensores foram
7 Experimentos Foram realizados dois experimentos distintos com o sensor GPS da marca Garmin e o sensor inercial da marca Xsens, Fig. 83 e 84 respectivamente: Na floresta amazônica, onde os sensores foram
Prof. Domingos Sávio Giordani
 Prof. Domingos Sávio Giordani dsgiordani@usp.br Como estruturar a pesquisa 1. Formular um problema O problema deve ser Claro e Preciso (usualmente na forma de pergunta) Deve ser empírico Ser suscetível
Prof. Domingos Sávio Giordani dsgiordani@usp.br Como estruturar a pesquisa 1. Formular um problema O problema deve ser Claro e Preciso (usualmente na forma de pergunta) Deve ser empírico Ser suscetível
Profa. Sheila Morais de Almeida. março
 Classificação das Ciências Profa. Sheila Morais de Almeida DAINF-UTFPR-PG março - 2019 Sheila Almeida (DAINF-UTFPR-PG) Classificação das Ciências março - 2019 1 / 23 Este material é preparado usando como
Classificação das Ciências Profa. Sheila Morais de Almeida DAINF-UTFPR-PG março - 2019 Sheila Almeida (DAINF-UTFPR-PG) Classificação das Ciências março - 2019 1 / 23 Este material é preparado usando como
Figura 4.2: Matriz Curricular
 Figura 4.2: Matriz Curricular 3660 Fundamentos de Matemática e Estatística Física Eletrônica Algoritmos e Programação Arquitetura de Computadores Metodologias e Técnicas de Computação Engenharia e Sistemas
Figura 4.2: Matriz Curricular 3660 Fundamentos de Matemática e Estatística Física Eletrônica Algoritmos e Programação Arquitetura de Computadores Metodologias e Técnicas de Computação Engenharia e Sistemas
MOBILIDADE E SISTEMAS DE TRANSPORTES TECNOLOGIAS PARA MONITORAMENTO E CONTROLE DE TRANSPORTES. Prof. Dr. Daniel Caetano
 MOBILIDADE E SISTEMAS DE TRANSPORTES TECNOLOGIAS PARA MONITORAMENTO E CONTROLE DE TRANSPORTES Prof. Dr. Daniel Caetano 2019-1 Objetivos Conceituar os Sistemas Inteligentes de Transporte (ITS) Conhecer
MOBILIDADE E SISTEMAS DE TRANSPORTES TECNOLOGIAS PARA MONITORAMENTO E CONTROLE DE TRANSPORTES Prof. Dr. Daniel Caetano 2019-1 Objetivos Conceituar os Sistemas Inteligentes de Transporte (ITS) Conhecer
Protocolo Híbrido de comunicação em RSSF móvel com coordenação baseada em enxame de robôs com comunicação contínua com a base
 Protocolo Híbrido de comunicação em RSSF móvel com coordenação baseada em enxame de robôs com comunicação contínua com a base Gutierre Andrade Duarte Roteiro 1. Introdução 2. Revisão de Protocolos Existentes
Protocolo Híbrido de comunicação em RSSF móvel com coordenação baseada em enxame de robôs com comunicação contínua com a base Gutierre Andrade Duarte Roteiro 1. Introdução 2. Revisão de Protocolos Existentes
Campus Capivari Análise e Desenvolvimento de Sistemas (ADS) Prof. André Luís Belini /
 Prof. André Luís Belini /") Campus Capivari Análise e Desenvolvimento de Sistemas (ADS) Prof. André Luís Belini E-mail: prof.andre.luis.belini@gmail.com / andre.belini@ifsp.edu.br MATÉRIA: SIG Aula N : 08 Tema: Como melhorar a tomada
Campus Capivari Análise e Desenvolvimento de Sistemas (ADS) Prof. André Luís Belini E-mail: prof.andre.luis.belini@gmail.com / andre.belini@ifsp.edu.br MATÉRIA: SIG Aula N : 08 Tema: Como melhorar a tomada
Sistemas de Tempo Real
 Sistemas Entradas Fluxo de controle do sistema Saídas Tempo de resposta tempo Sistemas de Tempo Real Abrangem todos os dispositivos com restrições de desempenho de tempo São muito mais comuns do que computadores
Sistemas Entradas Fluxo de controle do sistema Saídas Tempo de resposta tempo Sistemas de Tempo Real Abrangem todos os dispositivos com restrições de desempenho de tempo São muito mais comuns do que computadores
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 0-000 Tel: ()-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP -
Introdução à Ciência da Computação
 1 Universidade Federal Fluminense Campus de Rio das Ostras Curso de Ciência da Computação Introdução à Ciência da Computação Professor: Leandro Soares de Sousa e-mail: leandro.uff.puro@gmail.com site:
1 Universidade Federal Fluminense Campus de Rio das Ostras Curso de Ciência da Computação Introdução à Ciência da Computação Professor: Leandro Soares de Sousa e-mail: leandro.uff.puro@gmail.com site:
CURSO SUPERIOR DE TECNOLOGIA EM ANÁLISE E DESENVOLVIMENTO DE SISTEMAS DISCIPLINA : METODOLOGIA DA PESQUISA ASSUNTO: PESQUISA
 CURSO SUPERIOR DE TECNOLOGIA EM ANÁLISE E DESENVOLVIMENTO DE SISTEMAS DISCIPLINA : METODOLOGIA DA PESQUISA ASSUNTO: PESQUISA PROFESSOR : Romilson Lopes Sampaio PESQUISA Pesquisa é o conjunto de investigações,
CURSO SUPERIOR DE TECNOLOGIA EM ANÁLISE E DESENVOLVIMENTO DE SISTEMAS DISCIPLINA : METODOLOGIA DA PESQUISA ASSUNTO: PESQUISA PROFESSOR : Romilson Lopes Sampaio PESQUISA Pesquisa é o conjunto de investigações,
Processamento de Imagens Termais Aplicado à Navegação Autônoma. Wanessa da Silva
 Processamento de Imagens Termais Aplicado à Navegação Autônoma Wanessa da Silva Outubro, 2016 Introdução Roteiro Métodos Imagens Utilizadas Resultados Considerações Finais 1. Introdução 2. Métodos 4. Imagens:
Processamento de Imagens Termais Aplicado à Navegação Autônoma Wanessa da Silva Outubro, 2016 Introdução Roteiro Métodos Imagens Utilizadas Resultados Considerações Finais 1. Introdução 2. Métodos 4. Imagens: