Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc.
|
|
|
- Ayrton Machado
- 4 Há anos
- Visualizações:
Transcrição
 baseados em")

1 Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1

2 Roteiro Trabalhos Realizados Sistemas Avançados de Auxílio ao Condutor Veículos Robóticos Inteligentes Aprendizado de Máquina Inteligência Artificial Visão Computacional Navegação de Veículos Robóticos 2




3 Trabalhos Realizados 3

4 1. Introdução O trânsito é um dos principais causadores de acidentes fatais em todo o mundo, gerando um valor acima de 90% para falhas humanas; 1.24 milhões de mortes ocorrem em acidentes de trânsito a cada ano ao redor do mundo. Gráfico 1: Número de óbitos em acidentes de trânsito registrados pelo Ministério da Saúde (VIA SEGURAS, 2016) 4

5 O que buscamos na robotização de veículos?? Tomada de decisão com sentimentos e falhas... 5



6 Máquinas que pensam... Tomada de decisão com suporte de base de regras bem definidas; Não toma decisão com base na emoção; Automação para correção de falhas humanas. 6


7 Como a IA é vista hoje? IA Geral IA Restrita Aprendizado de Máquina Steven Spielberg

8 Aprendizado de Máquina Dependente de uma base de conhecimento O objetivo do aprendizado de máquina (ou "machine learning") é programar computadores para aprender um determinado comportamento ou padrão automaticamente a partir de exemplos ou observações. DATASETS 8


9 Baseadas em RNAs IA restrita 9








10 Desafios... Ambiente controlado com regras de trânsito (2007) Trafegar com outros veículos Tartan Racing Cruzamentos Stanford Racing 10


 FORD")
11 Sistemas comerciais Robotização Veicular: veículos comerciais atualmente: Sistemas Avançados de Assistência ao Condutor (ADAS) FORD Estacionamento Automático BMW LIDAR 11





12 Serviço 12



13 2. Objetivo Por meio da robotização de veículos é possível: Reduzir falhas de controle e imprudências humanas com sistemas que utilizam: Visão Computacional, Inteligência Artificial, Automação e outras tecnologias para auxiliar um veículo a navegar de maneira segura. Veículos Autônomos ou semi-autônomos 13

14 3. Contextualização e motivação Motivação Auxílio na tarefa de dirigir; Piloto automático para viagens de longa duração; Rotinas automáticas para prevenção de acidentes; Auxílio para navegação de veículos autônomos; 14


15 Trabalhos Realizados CARINA 1 CARINA 2 15


16 Trabalhos Realizados 16


17 Trabalhos Realizados 17




18 PESQUISA - Veículos Autônomos Trabalho de doutorado: Diego Renan Bruno 18
19 4. Sensoriamento Fusão de Sensores para Visão Computacional: Câmera estéreo 3D: Imagem 3D (para detecção) Imagem 2D (para reconhecimento) LIDAR - Velodyne HDL- 32E: Nuvem de pontos 3D (para detecção) Fator de refletância dos objetos placas 19


20 4. Sensoriamento 2D Data Fusão de Sensores para Visão Computacional: 3D Data 20


: Orientação")
21 3. Sensoriamento Fusão de Sensores: GPS de alta precisão: Posicionamento preciso do veículo Encoder para esterçamento da direção: Verificar como o veículo está sendo manobrado Unidade de medição inercial (IMU): Orientação do veículo 21
; Detecção e classificação de placas de trânsito;")
22 4. Contextualização e motivação Detecção de placas e semáforos de trânsito Advanced Driver Assistance Systems (ADAS); Detecção e classificação de placas de trânsito; 22

23 4. Contextualização e motivação Detecção de placas e semáforos de trânsito 23

24 5. IA Restrita Deep Learning Extração de features 2D: CNN: Aprendem automaticamente a extrair features em imagens 2D Figura 2: DCNN [Mendes, 2017] 24

25 5. IA Restrita Deep Learning Transfer Learning YOLO - VGG + Inception V3 Figura 2: Transfer Learning 25
26 6. Arquitetura Diagrama de blocos do sistema Figura 3: Diagrama de blocos 26

27 8. Seguidores de linha (GPS) Planejamento de rotas - GPS 27





28 O mapeamento dos sinais de 9. Problemas trânsito não seria eficiente neste tipo de situação Detecção de placas móveis (rotas não mapeadas): Atenção Visual: Desvios, trechos em obras, perigo na pista; Detecção de cones e placas de advertência devem ter maior prioridade. Desvios: Rota auxiliar Trecho em obras: Velocidade reduzida 28


29 10. Planejamento de rotas 29

30 11. Aplicação: Detecção de sinais de trânsito 1. Suporte para auxiliar um humano na tarefa de dirigir; 2. Suporte para veículos autônomos (futuro); 30

31 12. Atenção visual Análise do ambiente de navegação com regras de trânsito em conjunto com o comportamento do condutor 31


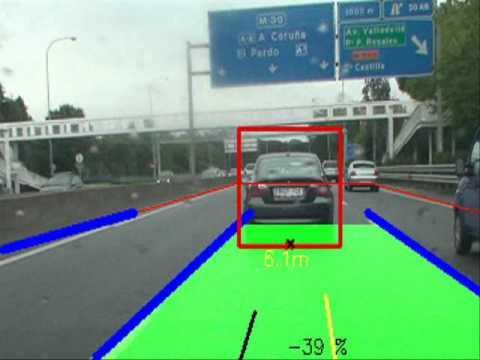
32 13. Sistema em funcionamento ADAS proposto: Percepção externa + percepção interna 32


33 7. ADAS Máquina de Estados + RNA Classificação dos problemas de desrespeito as leis de trânsito Suporte ao controle autônomo ou semi-autônomo; Neuro-FSM: Suporte a detecção e correção de falhas. Figura 28: Mapa utilizado Figura 29: Neuro-FSM 33

34 14. ADAS Automação com base de regras Rotinas automáticas para suporte a tomada de decisão: Detecção de falhas humanas; Detecção de falhas de controle autônomo. 34
;")
35 15. Resolução de problemas Detecção automática de placas de trânsito com fusão de dados 2D e 3D; Auxílio automatizado para tomada de decisão com base nas regras de trânsito (ADAS); 35
 - 2017")
36 16. Resultados obtidos Artigo para o LARS (Latin American Robotics Symposium)

37 16. Resultados obtidos Algoritmo de Slide Window Poder do Deep Learning X Modelos de detecção 3D Figure 5: Slide window algorithm execution [4] 37
 80km (b) 70km and (c) problem of occlusion [4]")
38 16. Resultados obtidos Resultados para oclusão de imagens Figure 6: Severe problem of occlusion of traffic signs [6] (a) 80km (b) 70km and (c) problem of occlusion [4] 38



39 16. Resultados obtidos Gráfico 3: Comparação dos testes de classificação 39
 2D Estado da arte em visão 2D")
40 Visão 2D CNN Segnet Detecção em dados (imagens) 2D Estado da arte em visão 2D 40

41 Deep Learning - YOLO 41






42 Deep Learning Intelligent Robotic Applications 2D Computer Vision + ML / DL s/news_releases/release.sfe?id=

43 MASK-RCNN Deep Learning 43

44 DeepLAB - Deep Learning Detecção + Segmentação de objetos 44

45 Problemas de visão 2D AI System Real Problem But also Researchers hack a self-driving car by putting stickers on street signs 45



46 Veículos inteligentes: Problemas de visão 2D Veículo Autônomo: Pare para sempre... Fotos de pessoas, Semáforos, Placas de Trânsito, etc. 46


47 Problemas de visão 2D 47




48 Problemas de visão 2D Reconhecimento Facial Smartphones Face Unlock Fail


49 Analysis and fusion of 2D and 3D images applied for detection and recognition of traffic signs using a new method of features extraction in conjunction with Deep Learning Diego Renan Bruno and Fernando Santos Osório

50 Methodology Our knowledge base is formed by a set of objects Visual attention and recognition Computer vision system and artificial intelligence Visual attention 2D recognition Artificial Intelligence




51 Methodology 2D 3D Object detected 2 classes of objects 2D and 3D data fusion (notion of depth and colors / textures) Extraction of 3D + ANN features


")
")
52 Methodology We apply Deep Learning to classify the bounding boxes that represent the vertical traffic signals Detection representation in 2D (x, y) Imagem 2D (RGB) Deep Learning (Inception V3) Traffic sign detected and recognized

53 Atenção Visual Fuzzy Atenção visual fuzzy com suporte a tomada de decisão Figura: Atenção visual fuzzy 53

54 Comunicação entre veículos

55 Comunicação V2V




56 As leis de trânsito estão sendo obedecidas? Acompanhamento em tempo real



57 57



58 Eu, robô - Asimov As três leis de Asimov funcionam?

59 Tomada de atitude sem sentimentos Proteger o seu dono ou a criança...? 59





60 Tomada de atitude sem sentimentos Um carro autônomo deve matar o bebê ou a avó? Depende de onde você é. Proteger o idoso ou a criança? 60

61 Acidentes também nos autônomos... 61



62 Acidentes também nos autônomos... Tracking! 62





63 Obrigado! MSc. Diego Renan Bruno 63
Motivação para o estudo de IA
 Motivação para o estudo de IA Aula #1.2 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Motivação para o estudo de IA Aula #1.2 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Tecnologias da Informação Motivações e Avanços
 Tecnologias da Informação Motivações e Avanços Aula #1.2. EBS 211 POO e UML Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Roteiro Dados x Informação; Computadores, Processamento de
Tecnologias da Informação Motivações e Avanços Aula #1.2. EBS 211 POO e UML Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Roteiro Dados x Informação; Computadores, Processamento de
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Introdução a Visão Computacional. Prof. Dr. Geraldo Braz Junior DEINF - UFMA
 Introdução a Visão Computacional Prof. Dr. Geraldo Braz Junior DEINF - UFMA O que é Visão Computacional? Você já viu? 2 O que se espera? Visão é sobre entender imagens Coloridas ou em tons de cinza Pequenas
Introdução a Visão Computacional Prof. Dr. Geraldo Braz Junior DEINF - UFMA O que é Visão Computacional? Você já viu? 2 O que se espera? Visão é sobre entender imagens Coloridas ou em tons de cinza Pequenas
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Cursos da Escola de Engenharias e Ciências Exatas - UnP
 Cursos da Escola de Engenharias e Ciências Exatas - UnP Professor Nielsen Castelo Damasceno E-mail: nielsen.castelo@unp.br Web: http://ncdd.com.br Sala Virtual Disciplina Visão Computacional (CH Total
Cursos da Escola de Engenharias e Ciências Exatas - UnP Professor Nielsen Castelo Damasceno E-mail: nielsen.castelo@unp.br Web: http://ncdd.com.br Sala Virtual Disciplina Visão Computacional (CH Total
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Inteligência Artificial: Introdução
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Inteligência Artificial: Introdução DCA0121 Inteligência Artificial Aplicada Daniel Enos / Heitor Medeiros
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Inteligência Artificial: Introdução DCA0121 Inteligência Artificial Aplicada Daniel Enos / Heitor Medeiros
Drones, visão computacional e inteligência artificial
 Drones, visão computacional e inteligência artificial Tecnologias a serviço da gestão pública e privada Dr. Eng. Charles R. Stempniak Quem não mede, não gerencia! William Edwards Demming Um dos maiores
Drones, visão computacional e inteligência artificial Tecnologias a serviço da gestão pública e privada Dr. Eng. Charles R. Stempniak Quem não mede, não gerencia! William Edwards Demming Um dos maiores
Motivação para o estudo de IA
 Motivação para o estudo de IA Aula #3.1 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Motivação para o estudo de IA Aula #3.1 EBS 564 IA Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Motivação para o estudo de IA + Biossistema Engenharia Projeto e desenvolvimento de
Implementação do controle PID e validação real utilizando a plataforma robótica RoboDeck
 Implementação do controle PID e validação real utilizando a plataforma robótica RoboDeck Leandro Zanolla 1, Daniel Rodrigues de Sousa 1, Wagner Tanaka Botelho 1, Maria das Graças Bruno Marietto 2 e Renan
Implementação do controle PID e validação real utilizando a plataforma robótica RoboDeck Leandro Zanolla 1, Daniel Rodrigues de Sousa 1, Wagner Tanaka Botelho 1, Maria das Graças Bruno Marietto 2 e Renan
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Prof. Dr. Jarley Nóbrega
 Prof. Dr. Jarley Nóbrega http://jarley.com jpn@jarley.com Inteligência Artificial 2019.1 Programa da Disciplina 2018.2 I - Introdução Histórico Conceitos Paradigmas de raciocínio em IA Conceito de Agentes
Prof. Dr. Jarley Nóbrega http://jarley.com jpn@jarley.com Inteligência Artificial 2019.1 Programa da Disciplina 2018.2 I - Introdução Histórico Conceitos Paradigmas de raciocínio em IA Conceito de Agentes
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
Aplicação de Histograma de Gradientes Orientados para detecção de hidrômetros em imagens de fundo complexo
 Aplicação de Histograma de Gradientes Orientados para detecção de hidrômetros em imagens de fundo complexo Juliana Patrícia Detroz Professor: André Tavares da Silva Universidade do Estado de Santa Catarina
Aplicação de Histograma de Gradientes Orientados para detecção de hidrômetros em imagens de fundo complexo Juliana Patrícia Detroz Professor: André Tavares da Silva Universidade do Estado de Santa Catarina
APLICAÇÃO DE TESTES UTILIZANDO LÓGICA CLÁSSICA NA PROGRAMAÇÃO DE PLATAFORMA ROBÓTICA MÓVEL
 APLICAÇÃO DE TESTES UTILIZANDO LÓGICA CLÁSSICA NA PROGRAMAÇÃO DE PLATAFORMA ROBÓTICA MÓVEL Thomas Massaru Okuyama[PIBIC] 1, Márcio Mendonça[Orientador] 2, Keriton Lopes [Colaborador] 3 1 Programa Institucional
APLICAÇÃO DE TESTES UTILIZANDO LÓGICA CLÁSSICA NA PROGRAMAÇÃO DE PLATAFORMA ROBÓTICA MÓVEL Thomas Massaru Okuyama[PIBIC] 1, Márcio Mendonça[Orientador] 2, Keriton Lopes [Colaborador] 3 1 Programa Institucional
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
1 ESCOLA POLITÉCNICA DA USP Introdução Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
Técnicas de Inteligência Artificial
 Universidade do Sul de Santa Catarina Ciência da Computação Técnicas de Inteligência Artificial Aula 01 Introdução, motivação e áreas de aplicação Prof. Max Pereira Neurônio de McCulloch-Pitts Warren
Universidade do Sul de Santa Catarina Ciência da Computação Técnicas de Inteligência Artificial Aula 01 Introdução, motivação e áreas de aplicação Prof. Max Pereira Neurônio de McCulloch-Pitts Warren
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
Inteligência Artificial
 Inteligência Artificial Professor Rafael Stubs Parpinelli E-mail: rafael.parpinelli@udesc.br udesc.academia.edu/rafaelstubsparpinelli www.researchgate.net/profile/rafael_parpinelli www.joinville.udesc.br/portal/professores/parpinelli/
Inteligência Artificial Professor Rafael Stubs Parpinelli E-mail: rafael.parpinelli@udesc.br udesc.academia.edu/rafaelstubsparpinelli www.researchgate.net/profile/rafael_parpinelli www.joinville.udesc.br/portal/professores/parpinelli/
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Departamento de Engenharia - Universidade Federal de Lavras
 Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Técnicas de Inteligência Artificial
 Universidade do Sul de Santa Catarina Ciência da Computação Técnicas de Inteligência Artificial Aula 01 Introdução, motivação e áreas de aplicação Prof. Max Pereira O futuro, das máquinas inteligentes,
Universidade do Sul de Santa Catarina Ciência da Computação Técnicas de Inteligência Artificial Aula 01 Introdução, motivação e áreas de aplicação Prof. Max Pereira O futuro, das máquinas inteligentes,
VANETS e Carros Autônomos. Fernando Freire Scattone e Gustavo Covas
 VANETS e Carros Autônomos Fernando Freire Scattone e Gustavo Covas Intelligent Transportation Systems - Área de pesquisa com objetivo de otimizar sistemas de transporte utilizando tecnologia - Três tipos
VANETS e Carros Autônomos Fernando Freire Scattone e Gustavo Covas Intelligent Transportation Systems - Área de pesquisa com objetivo de otimizar sistemas de transporte utilizando tecnologia - Três tipos
Reconhecimento Ótico de Caracteres em Placas Veiculares
 Universidade Federal De Pernambuco Centro De Informática Graduação Em Engenharia Da Computação 2012.2 Reconhecimento Ótico de Caracteres em Placas Veiculares Proposta de Trabalho de Graduação Aluno Pedro
Universidade Federal De Pernambuco Centro De Informática Graduação Em Engenharia Da Computação 2012.2 Reconhecimento Ótico de Caracteres em Placas Veiculares Proposta de Trabalho de Graduação Aluno Pedro
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
INDÚSTRIA 4.0 O MOMENTO É AGORA
 INDÚSTRIA 4.0 O MOMENTO É AGORA Um conceito, múltiplos nomes e atores AUMENTAR A COMPETITIVIDADE DAS EMPRESAS POR MEIO DE TECNOLOGIAS DE DIGITALIZAÇÃO A 4ª Revolução industrial e seus 3 eixos Tecnologia
INDÚSTRIA 4.0 O MOMENTO É AGORA Um conceito, múltiplos nomes e atores AUMENTAR A COMPETITIVIDADE DAS EMPRESAS POR MEIO DE TECNOLOGIAS DE DIGITALIZAÇÃO A 4ª Revolução industrial e seus 3 eixos Tecnologia
EEL891 Aprendizado de Máquina Prof. Heraldo L. S. Almeida. Introdução
 1 Introdução 1. Introdução 1.1. O que é Aprendizado de Máquina? 1.2. Por que Machine Learning é o Futuro? 1.3. Algumas Aplicações 1.4. Tipos de Aprendizado 1. Introdução 17 1. Introdução 1.1. O que é Aprendizado
1 Introdução 1. Introdução 1.1. O que é Aprendizado de Máquina? 1.2. Por que Machine Learning é o Futuro? 1.3. Algumas Aplicações 1.4. Tipos de Aprendizado 1. Introdução 17 1. Introdução 1.1. O que é Aprendizado
TMC Traffic Message Channel
 TMC Traffic Message Channel Um sistema de informações de tráfego Eng. Alexandre Derani Jr Abril/2009 Conteúdo: 1. Sistemas de Informações sobre o Tráfego Urbano e Rodoviário 2. TMC Traffic Message Channel
TMC Traffic Message Channel Um sistema de informações de tráfego Eng. Alexandre Derani Jr Abril/2009 Conteúdo: 1. Sistemas de Informações sobre o Tráfego Urbano e Rodoviário 2. TMC Traffic Message Channel
Reconhecimento de Sinais de Trânsito Utilizando Deep Learning
 Reconhecimento de Sinais de Trânsito Utilizando Deep Learning Marcos Vinícius Oliveira Sobrinho 1, Matheus Chaves Menezes 1, Chrystian Gustavo Martins Nascimento 1, Geraldo Braz Júnior 2 1 Curso de Ciência
Reconhecimento de Sinais de Trânsito Utilizando Deep Learning Marcos Vinícius Oliveira Sobrinho 1, Matheus Chaves Menezes 1, Chrystian Gustavo Martins Nascimento 1, Geraldo Braz Júnior 2 1 Curso de Ciência
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Object Tracking. Fernando Medeiros Dufour Ciência da Computação - UFPR Tópicos em Visão Computacional
 Object Tracking Fernando Medeiros Dufour Ciência da Computação - UFPR Tópicos em Visão Computacional Índice 1. Introdução a. Problema b. Aplicações c. Dificuldades d. Datasets 2. Redes Neurais Convolucionais
Object Tracking Fernando Medeiros Dufour Ciência da Computação - UFPR Tópicos em Visão Computacional Índice 1. Introdução a. Problema b. Aplicações c. Dificuldades d. Datasets 2. Redes Neurais Convolucionais
Inteligência Artificial Introdução
 Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Ricardo Aloysio e Silva Gerente de Tecnologia e Educação para e Indústria FIEMG/SENAI
 Ricardo Aloysio e Silva Gerente de Tecnologia e Educação para e Indústria FIEMG/SENAI Especialista em Engenharia de Projetos Industriais Especialista em Produção Automobilística Especialista em Gestão
Ricardo Aloysio e Silva Gerente de Tecnologia e Educação para e Indústria FIEMG/SENAI Especialista em Engenharia de Projetos Industriais Especialista em Produção Automobilística Especialista em Gestão
Person Re-Identification. Autor: Guilherme Zasyeki Machado
 Person Re-Identification Autor: Guilherme Zasyeki Machado Sumário - Introdução ao problema - Visão geral ao processo de Re-Identificação - Evolução estado da arte - Datasets disponíveis - Análise estado
Person Re-Identification Autor: Guilherme Zasyeki Machado Sumário - Introdução ao problema - Visão geral ao processo de Re-Identificação - Evolução estado da arte - Datasets disponíveis - Análise estado
Oferta de disciplinas para o período 2017/1
 PINF-6008 Engenharia de Software PINF-6011 Desenvolvimento Orientado a Modelos PINF-6028 Programação Linear 08:00- PINF-6038 PINF-6038 Tópicos Especiais em Informática: Métodos Empíricos para Inteligência
PINF-6008 Engenharia de Software PINF-6011 Desenvolvimento Orientado a Modelos PINF-6028 Programação Linear 08:00- PINF-6038 PINF-6038 Tópicos Especiais em Informática: Métodos Empíricos para Inteligência
Orientação a Objetos e UML
 Orientação a Objetos e UML Aula #3.1. EBS 211 POO e UML Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Orientação a Objetos e UML A crise do software (1970) 2 Orientação a Objetos
Orientação a Objetos e UML Aula #3.1. EBS 211 POO e UML Prof. Luiz Fernando S. Coletta luizfsc@tupa.unesp.br Campus de Tupã Orientação a Objetos e UML A crise do software (1970) 2 Orientação a Objetos
Visão Computacional. Prof. Leandro Augusto Frata Fernandes TCC Introdução à Ciência da Computação (2012.
 Visão Computacional Prof. Leandro Augusto Frata Fernandes laffernandes@ic.uff.br TCC-00.169 Introdução à Ciência da Computação (2012.1) Visão Humana Responsável por cerca de 75% de nossa percepção O ato
Visão Computacional Prof. Leandro Augusto Frata Fernandes laffernandes@ic.uff.br TCC-00.169 Introdução à Ciência da Computação (2012.1) Visão Humana Responsável por cerca de 75% de nossa percepção O ato
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Introdução. Aula 1 Inteligência Artificial HDL
 Aula 1 Inteligência Artificial (Definição) O que é Inteligência Artificial? Uma área de pesquisa que investiga formas de habilitar o computador a realizar tarefas nas quais, até o momento, o ser humano
Aula 1 Inteligência Artificial (Definição) O que é Inteligência Artificial? Uma área de pesquisa que investiga formas de habilitar o computador a realizar tarefas nas quais, até o momento, o ser humano
MOBILIDADE E SISTEMAS DE TRANSPORTES TECNOLOGIAS PARA MONITORAMENTO E CONTROLE DE TRANSPORTES. Prof. Dr. Daniel Caetano
 MOBILIDADE E SISTEMAS DE TRANSPORTES TECNOLOGIAS PARA MONITORAMENTO E CONTROLE DE TRANSPORTES Prof. Dr. Daniel Caetano 2019-1 Objetivos Conceituar os Sistemas Inteligentes de Transporte (ITS) Conhecer
MOBILIDADE E SISTEMAS DE TRANSPORTES TECNOLOGIAS PARA MONITORAMENTO E CONTROLE DE TRANSPORTES Prof. Dr. Daniel Caetano 2019-1 Objetivos Conceituar os Sistemas Inteligentes de Transporte (ITS) Conhecer
Fabrício Jailson Barth BandTec
 Introdução à Inteligência Artificial Fabrício Jailson Barth fabricio.barth@bandtec.com.br BandTec 1 o semestre de 2012 Objetivos e Sumário O que é Inteligência Artificial (IA)? Objetivos da IA. Influência
Introdução à Inteligência Artificial Fabrício Jailson Barth fabricio.barth@bandtec.com.br BandTec 1 o semestre de 2012 Objetivos e Sumário O que é Inteligência Artificial (IA)? Objetivos da IA. Influência
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
SEMINÁRIO DOS ARTIGOS:
 SEMINÁRIO DOS ARTIGOS: Text Detection and Character Recognition in Scene Images with Unsupervised Feature Learning End-to-End Text Recognition with Convolutional Neural Networks Fernanda Maria Sirlene
SEMINÁRIO DOS ARTIGOS: Text Detection and Character Recognition in Scene Images with Unsupervised Feature Learning End-to-End Text Recognition with Convolutional Neural Networks Fernanda Maria Sirlene
Face Recognition using RGB-D Images
 Face Recognition using RGB-D Images Helder C. R. de Oliveira N.USP: 7122065 Polyana Nunes N.USP: 9043220 Sobre o Artigo Publication: 2013 IEEE Sixth International Conference Author(s) Goswami, G. (Índia
Face Recognition using RGB-D Images Helder C. R. de Oliveira N.USP: 7122065 Polyana Nunes N.USP: 9043220 Sobre o Artigo Publication: 2013 IEEE Sixth International Conference Author(s) Goswami, G. (Índia
Desenvolvimento de um Robô para
 Desenvolvimento de um Robô para Inspeção de Linhas de Transmissão Prof. Dr. Walter Fetter Lages fetter@eletro.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia
Desenvolvimento de um Robô para Inspeção de Linhas de Transmissão Prof. Dr. Walter Fetter Lages fetter@eletro.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia
Introdução Automatic Vehicle Control Automated Highway Systems
 1 Introdução O trânsito nas estradas está ficando cada vez mais intenso, ao passo que os acidentes, o tempo de percurso, e o stress aumentam a cada dia devido a esse fato. Resultados de pesquisas já mostram
1 Introdução O trânsito nas estradas está ficando cada vez mais intenso, ao passo que os acidentes, o tempo de percurso, e o stress aumentam a cada dia devido a esse fato. Resultados de pesquisas já mostram
Morfologia Matemática: algumas aplicações. Rosana Gomes Bernardo Universidade Federal Fluminense
 Morfologia Matemática: algumas aplicações Rosana Gomes Bernardo Universidade Federal Fluminense Introdução Aplicações Motivadoras - Consumo de Gás Natural Roteiro - Placas de Veículos Referências - Cartografia
Morfologia Matemática: algumas aplicações Rosana Gomes Bernardo Universidade Federal Fluminense Introdução Aplicações Motivadoras - Consumo de Gás Natural Roteiro - Placas de Veículos Referências - Cartografia
Futurecom 2016 Painel Automotivo Veículos como futuros integradores de serviços digitais.
 Futurecom 2016 Painel Automotivo Veículos como futuros integradores de serviços digitais. No passado já foi assim Obrigado Ricardo BACELLAR Diretor de Relacionamento - Automotivo rbacellar@kpmg.com.br
Futurecom 2016 Painel Automotivo Veículos como futuros integradores de serviços digitais. No passado já foi assim Obrigado Ricardo BACELLAR Diretor de Relacionamento - Automotivo rbacellar@kpmg.com.br
Desmistificando o uso de Machine Learning aplicada a negócios
 Desmistificando o uso de Machine Learning aplicada a negócios Antonio Moreira de Oliveira & Antonio Carlos Navarro Sobre os apresentadores Antonio C Navarro HPC HPDA Client Technical Specialist Antonio
Desmistificando o uso de Machine Learning aplicada a negócios Antonio Moreira de Oliveira & Antonio Carlos Navarro Sobre os apresentadores Antonio C Navarro HPC HPDA Client Technical Specialist Antonio
Minicurso: Inteligência Artificial Aplicada a Sistemas Elétricos
 Minicurso: Inteligência Artificial Aplicada a Sistemas Elétricos Introdução a Machine Learning: Teoria, Aplicações e IA na Arquitetura Intel Vitor Hugo Ferreira, DSc - UFF Flávio Mello, DSc UFRJ e Ai2Biz
Minicurso: Inteligência Artificial Aplicada a Sistemas Elétricos Introdução a Machine Learning: Teoria, Aplicações e IA na Arquitetura Intel Vitor Hugo Ferreira, DSc - UFF Flávio Mello, DSc UFRJ e Ai2Biz
PCS 5869 INTELIGÊNCIA ARTIFICIAL
 PCS 5869 INTELIGÊNCIA ARTIFICIAL 1º Quadrimestre de 2016 Rodolfo Valiente Romero Seminário PCS-5743I Artigo http://dx.doi.org/10.1016/j.engappai.2014.08.015 A learning-based thresholding method customizable
PCS 5869 INTELIGÊNCIA ARTIFICIAL 1º Quadrimestre de 2016 Rodolfo Valiente Romero Seminário PCS-5743I Artigo http://dx.doi.org/10.1016/j.engappai.2014.08.015 A learning-based thresholding method customizable
Minicurso III Mineração de Dados Usando Algoritmos Bioinspirados: Conceitos Básicos e Aplicações Sala 1.04
 08h00 10h30 11h30 Hora Domingo, 18 de Setembro de 2011 - - - - - 10h30 - - 11h30 12h00-13h00 Intervalo para Almoço 13h00-13h30 13h30 14h30 15h30 16h30 - - 14h30 - - 15h30 - - 17h00 17h00-17h30 17h30-18h30
08h00 10h30 11h30 Hora Domingo, 18 de Setembro de 2011 - - - - - 10h30 - - 11h30 12h00-13h00 Intervalo para Almoço 13h00-13h30 13h30 14h30 15h30 16h30 - - 14h30 - - 15h30 - - 17h00 17h00-17h30 17h30-18h30
INDICADORES DE TECNOLOGIA
 INDICADORES DE TECNOLOGIA INDICADORES DE TECNOLOGIA O Brasil ganhou 5 posições no índice do Fórum Econômico Mundial, que mede o uso de tecnologias de informação e comunicação (TICs). Chegou ao 56º lugar,
INDICADORES DE TECNOLOGIA INDICADORES DE TECNOLOGIA O Brasil ganhou 5 posições no índice do Fórum Econômico Mundial, que mede o uso de tecnologias de informação e comunicação (TICs). Chegou ao 56º lugar,
Visão computacional. Juliana Patrícia Detroz Orientador: André Tavares Silva
 Visão computacional Juliana Patrícia Detroz Orientador: André Tavares Silva Visão computacional Tentativa de replicar a habilidade humana da visão através da percepção e entendimento de uma imagem; Fazer
Visão computacional Juliana Patrícia Detroz Orientador: André Tavares Silva Visão computacional Tentativa de replicar a habilidade humana da visão através da percepção e entendimento de uma imagem; Fazer
Agentes Inteligentes. Módulo 02 27/02/2013. Inteligência Artificial. Profª Hemilis Joyse
 Agentes Inteligentes Módulo 02 1 Agente É tudo que pode ser considerado capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por intermédio de atuadores. 2 Agente Tabela parcial
Agentes Inteligentes Módulo 02 1 Agente É tudo que pode ser considerado capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por intermédio de atuadores. 2 Agente Tabela parcial
Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC
 Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC Ederson Costa dos Santos 1, Leandro Barjonas da Cruz Rodrigues 1, André Maurício Damasceno Ferreira 2 1
Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC Ederson Costa dos Santos 1, Leandro Barjonas da Cruz Rodrigues 1, André Maurício Damasceno Ferreira 2 1
Novas tecnologias: o rumo a seguir em seu CSC Estou preparado para o que o mundo está usando? Arnaldo Di Petta Novembro/2017
 Novas tecnologias: o rumo a seguir em seu CSC Estou preparado para o que o mundo está usando? Arnaldo Di Petta Novembro/2017 Tópicos para este momento Quem somos Porque estamos aqui O caminho seguido pelos
Novas tecnologias: o rumo a seguir em seu CSC Estou preparado para o que o mundo está usando? Arnaldo Di Petta Novembro/2017 Tópicos para este momento Quem somos Porque estamos aqui O caminho seguido pelos
Desenvolvimento de um Sistema de Visão Artificial para um Robô Explorador
 Computer on the Beach 2014 - Artigos Completos 214 Desenvolvimento de um Sistema de Visão Artificial para um Robô Explorador Joildo Schueroff 1, Fernando Emilio Puntel 1, Giann Carlos Spilere Nandi 1,
Computer on the Beach 2014 - Artigos Completos 214 Desenvolvimento de um Sistema de Visão Artificial para um Robô Explorador Joildo Schueroff 1, Fernando Emilio Puntel 1, Giann Carlos Spilere Nandi 1,
Perguntas Sobre Max Cardoso
 RPA +AI services Max Cardoso Head of RPA at CertSys Max.Almeida@certsys.com.br RPA + AI RPA And Automation RPA Congress 2019 RPA + AI Qual o objetivo do uso das tecnologias cognitivas na automação de tarefas?
RPA +AI services Max Cardoso Head of RPA at CertSys Max.Almeida@certsys.com.br RPA + AI RPA And Automation RPA Congress 2019 RPA + AI Qual o objetivo do uso das tecnologias cognitivas na automação de tarefas?
Introdução. Inteligência Computacional. Prof. João Alberto Fabro
 Introdução Inteligência Computacional Prof. João Alberto Fabro Estrutura da Apresentação Início Inteligência Artificial... O que se estuda! Como foi estudado... (Sistemas Especialistas) Estrutura da Apresentação
Introdução Inteligência Computacional Prof. João Alberto Fabro Estrutura da Apresentação Início Inteligência Artificial... O que se estuda! Como foi estudado... (Sistemas Especialistas) Estrutura da Apresentação
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Mapeamento de ambientes e processamento visual utilizando Kinect
 Mapeamento de ambientes e processamento visual utilizando Kinect Mário Alberto Cecchi Raduan Bolsista PIBIC/UFRJ Orientador: Adriano Joaquim de Oliveira Cruz, PhD Laboratório de Inteligência Computacional
Mapeamento de ambientes e processamento visual utilizando Kinect Mário Alberto Cecchi Raduan Bolsista PIBIC/UFRJ Orientador: Adriano Joaquim de Oliveira Cruz, PhD Laboratório de Inteligência Computacional
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Pentaho IoT Analytics Open Source Trilha IoT
 Pentaho IoT Analytics Open Source Trilha IoT Marcio Junior Vieira CEO & Data Scientist, Ambiente Livre Marcio Junior Vieira Mini-cv 18 anos de experiência em informática, vivência em desenvolvimento e
Pentaho IoT Analytics Open Source Trilha IoT Marcio Junior Vieira CEO & Data Scientist, Ambiente Livre Marcio Junior Vieira Mini-cv 18 anos de experiência em informática, vivência em desenvolvimento e
GERENCIAMENTO DE PROJETOS - 20h - EaD
 GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
4ª REUNIÃO ORDINÁRIA DA COMAT/CBIC
 4ª REUNIÃO ORDINÁRIA DA COMAT/CBIC A Industria 4.0 e o Futuro da Construção Brasília, 12 de dezembro de 2018 Luiz Henrique Ceotto lhceotto@terra.com.br O grande desafio da construção civil the construction
4ª REUNIÃO ORDINÁRIA DA COMAT/CBIC A Industria 4.0 e o Futuro da Construção Brasília, 12 de dezembro de 2018 Luiz Henrique Ceotto lhceotto@terra.com.br O grande desafio da construção civil the construction
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Objetivos do curso. Bibliografia. Critérios de avaliação. Critérios de avaliação. Critérios de avaliação 03/07/2016
 Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
Manual de Docência para a disciplina de Inteligência Artificial 2005/2006 Engenharia Informática, 4º ano José Manuel Torres
 Manual de Docência para a disciplina de Inteligência Artificial 2005/2006 Engenharia Informática, 4º ano José Manuel Torres Número de horas do programa: 60 horas Número de horas Semanal: 4 Horas Número
Manual de Docência para a disciplina de Inteligência Artificial 2005/2006 Engenharia Informática, 4º ano José Manuel Torres Número de horas do programa: 60 horas Número de horas Semanal: 4 Horas Número
READING DIGITS IN NATURAL IMAGES WITH UNSUPERVISED FEATURE LEARNING
 READING DIGITS IN NATURAL IMAGES WITH UNSUPERVISED FEATURE LEARNING Fernanda Maria Sirlene READING DIGITS IN NATURAL IMAGES WITH UNSUPERVISED FEATURE LEARNING NIPS Workshop on Deep Learning and Unsupervised
READING DIGITS IN NATURAL IMAGES WITH UNSUPERVISED FEATURE LEARNING Fernanda Maria Sirlene READING DIGITS IN NATURAL IMAGES WITH UNSUPERVISED FEATURE LEARNING NIPS Workshop on Deep Learning and Unsupervised
Reconhecimento de Gestos
 Reconhecimento de Gestos Henrique Augusto Richter Tópicos em Visão Computacional Universidade Federal do Paraná Sumário Introdução Utilização Problemas Trabalhos Artigo 1 Artigo 2 Project Soli Introdução
Reconhecimento de Gestos Henrique Augusto Richter Tópicos em Visão Computacional Universidade Federal do Paraná Sumário Introdução Utilização Problemas Trabalhos Artigo 1 Artigo 2 Project Soli Introdução
Métodos de Segmentação de Imagem para Análise da Marcha
 Métodos de Segmentação de Imagem para Análise da Marcha Maria João M. Vasconcelos, João Manuel R. S. Tavares maria.vasconcelos@fe.up.pt, tavares@fe.up.pt 3º Congresso Nacional de Biomecânica 11-12 Fevereiro
Métodos de Segmentação de Imagem para Análise da Marcha Maria João M. Vasconcelos, João Manuel R. S. Tavares maria.vasconcelos@fe.up.pt, tavares@fe.up.pt 3º Congresso Nacional de Biomecânica 11-12 Fevereiro
SOLUÇÃO DEEP LEARNING INTELIGÊNCIA ARTIFICAL
 SOLUÇÃO DEEP LEARNING INTELIGÊNCIA ARTIFICAL TECNOLOGIA DEEP LEARNING Nesta era de Tecnologia de Dados de Vigilância (SDT) em crescente expansão, a inteligência artificial se tornará a base do setor de
SOLUÇÃO DEEP LEARNING INTELIGÊNCIA ARTIFICAL TECNOLOGIA DEEP LEARNING Nesta era de Tecnologia de Dados de Vigilância (SDT) em crescente expansão, a inteligência artificial se tornará a base do setor de
Processamento de Imagens Termais Aplicado à Navegação Autônoma. Wanessa da Silva
 Processamento de Imagens Termais Aplicado à Navegação Autônoma Wanessa da Silva Outubro, 2016 Introdução Roteiro Métodos Imagens Utilizadas Resultados Considerações Finais 1. Introdução 2. Métodos 4. Imagens:
Processamento de Imagens Termais Aplicado à Navegação Autônoma Wanessa da Silva Outubro, 2016 Introdução Roteiro Métodos Imagens Utilizadas Resultados Considerações Finais 1. Introdução 2. Métodos 4. Imagens:
Determinação de vícios refrativos oculares utilizando Support Vector Machines
 Determinação de vícios refrativos oculares utilizando Support Vector Machines Giampaolo Luiz Libralão, André Ponce de Leon F. de Carvalho, Antonio Valerio Netto, Maria Cristina Ferreira de Oliveira Instituto
Determinação de vícios refrativos oculares utilizando Support Vector Machines Giampaolo Luiz Libralão, André Ponce de Leon F. de Carvalho, Antonio Valerio Netto, Maria Cristina Ferreira de Oliveira Instituto
Máquinas de Vetores de Suporte Aplicadas à Classificação de Defeitos em Couro Bovino
 Máquinas de Vetores de Suporte Aplicadas à Classificação de Defeitos em Couro Bovino Ricardo Cezar Bonfim Rodrigues 24 de abril de 2006 1 Antecedentes e Justificativa Hoje, em diversos processos industriais,
Máquinas de Vetores de Suporte Aplicadas à Classificação de Defeitos em Couro Bovino Ricardo Cezar Bonfim Rodrigues 24 de abril de 2006 1 Antecedentes e Justificativa Hoje, em diversos processos industriais,
Renderização de pessoas em movimento a partir de vídeos. Ricardo Juliano Mesquita Silva Oda Supervisor: Carlos Hitoshi Morimoto
 Renderização de pessoas em movimento a partir de vídeos Ricardo Juliano Mesquita Silva Oda Supervisor: Carlos Hitoshi Morimoto Trabalho de conclusão de curso IME - USP - 2011 Renderização Rendering is
Renderização de pessoas em movimento a partir de vídeos Ricardo Juliano Mesquita Silva Oda Supervisor: Carlos Hitoshi Morimoto Trabalho de conclusão de curso IME - USP - 2011 Renderização Rendering is
Extração de objetos de interesse em imagens digitais utilizando a biblioteca de Visão Computacional OpenCV
 Extração de objetos de interesse em imagens digitais utilizando a biblioteca de Visão Computacional OpenCV Izadora Aparecida RAMOS 1,3,4 ; Servílio Souza de ASSIS 1,3,4 ; Bruno Alberto Soares OLIVEIRA
Extração de objetos de interesse em imagens digitais utilizando a biblioteca de Visão Computacional OpenCV Izadora Aparecida RAMOS 1,3,4 ; Servílio Souza de ASSIS 1,3,4 ; Bruno Alberto Soares OLIVEIRA
Mestrado Integrado em Engenharia Informática e Computação (MIEIC) João Pascoal Faria
 João Pascoal Faria") Mestrado Integrado em Engenharia Informática e Computação (MIEIC) João Pascoal Faria 14 de julho de 2017 Sumário Importância da Engenharia Informática Empregabilidade Saídas profissionais Médias de entrada
Mestrado Integrado em Engenharia Informática e Computação (MIEIC) João Pascoal Faria 14 de julho de 2017 Sumário Importância da Engenharia Informática Empregabilidade Saídas profissionais Médias de entrada
MouseCam: aplicação de controle do mouse via câmera
 MouseCam: aplicação de controle do mouse via câmera Introdução ao Processamento de Imagens COS756 PESC/COPPE/UFRJ 2013 1 Renan Garrot garrot@cos.ufrj.br 1. Introdução O processo de tracking por vídeo consiste
MouseCam: aplicação de controle do mouse via câmera Introdução ao Processamento de Imagens COS756 PESC/COPPE/UFRJ 2013 1 Renan Garrot garrot@cos.ufrj.br 1. Introdução O processo de tracking por vídeo consiste
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Oferta de disciplinas para o período 2016/2
 PINF-6002 Arquitetura de Computadores PINF-6013 Elementos Finitos PINF-6017 Metodologia de Pesquisa PINF-6037 Teoria dos Grafos - PINF-6038 Tópicos Especiais em Informática: Computação Natural - PINF-6038
PINF-6002 Arquitetura de Computadores PINF-6013 Elementos Finitos PINF-6017 Metodologia de Pesquisa PINF-6037 Teoria dos Grafos - PINF-6038 Tópicos Especiais em Informática: Computação Natural - PINF-6038
C-ITS PILOT IN THE LISBON URBAN NODE
 C-ITS PILOT IN THE LISBON URBAN NODE Sérgio Costa - Câmara Municipal de Lisboa 9-mar-2018 15.03.2018 www.c-roads.eu 1 Cooperative Intelligent Transport Systems Estratégia global definida pela Comissão
C-ITS PILOT IN THE LISBON URBAN NODE Sérgio Costa - Câmara Municipal de Lisboa 9-mar-2018 15.03.2018 www.c-roads.eu 1 Cooperative Intelligent Transport Systems Estratégia global definida pela Comissão
Sketch to Photo Matching: A Feature-based Approach (Klare and Jain [2010])
![Sketch to Photo Matching: A Feature-based Approach (Klare and Jain [2010])](/thumbs/71/66189029.jpg "Sketch to Photo Matching: A Feature-based Approach (Klare and Jain [2010])") Sketch to Photo Matching: A Feature-based Approach (Klare and Jain [2010]) Marco Antonio de A. Silva Programa de Pós-Graduação em Ciência da Computação - PPGCC Departamento de Computação - DECOM Universidade
Sketch to Photo Matching: A Feature-based Approach (Klare and Jain [2010]) Marco Antonio de A. Silva Programa de Pós-Graduação em Ciência da Computação - PPGCC Departamento de Computação - DECOM Universidade
Oferta de disciplinas para o período 2018/2
 PINF-6017 Metodologia de Pesquisa 09:00- PINF-6033 Seminário de Pesquisa: Ontological Foundations for Conceptual Modeling with Applications CT VII 18 Lucia Catabriga Maria Claudia Silva Boeres Giancarlo
PINF-6017 Metodologia de Pesquisa 09:00- PINF-6033 Seminário de Pesquisa: Ontological Foundations for Conceptual Modeling with Applications CT VII 18 Lucia Catabriga Maria Claudia Silva Boeres Giancarlo
Transformação Digital
 20Tendências de Transformação Digital SLIDESHARE 01 Inteligência artificial Este ano a inteligência artificial começará a ser implementada para realização de tarefas muito repetitivas. Isso se dará principalmente
20Tendências de Transformação Digital SLIDESHARE 01 Inteligência artificial Este ano a inteligência artificial começará a ser implementada para realização de tarefas muito repetitivas. Isso se dará principalmente