Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
|
|
|
- Jónatas Barreiro Gusmão
- 6 Há anos
- Visualizações:
Transcrição


1 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização Mapas do Ambiente: Construção de Mapas Planejamento de Trajetórias SMPA - Sense Model Plan Act Problemas: Desvio de Obstáculos Posicionamento Soluções: Controle Robusto Híbrido Simulação - SimRob3D 1



 IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4")
2 e Veículos Autônomos GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Inteligência & Robôs Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Mapas do Ambiente: Construção de Mapas Planejamento de Trajetórias SMPA - Sense Model Plan Act Problemas: Desvio de Obstáculos Posicionamento Soluções: Controle Robusto Híbrido Simulação - SimRob3D 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico C0 C1 M1 C2 C3 C4 C5 M2 Controle Reativo Sensorial-Motor: Sentir => Agir C7 C6 IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) 2





3 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Sensorial-Motor: Sentir => Agir 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Sensorial-Motor: Sentir => Agir 3
4 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Mapa, Grafo de Visibilidade, Caminho Otimizado (Dijkstra) 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Controle Hierárquico: - Camadas - Prioridades - Troca de Informações Figures From: Brooks, R. A. MIT A.I. Memo 864 Sept Brooks - Arquitetura Subsumption 4


5 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico / Híbrido Farlei Heinen Mapa do Ambiente Navegação baseada em Mapa Geométrico 5





6 Contrução do Mapa do Ambiente: SMPA - SENSE / MODEL / PLAN / ACT Mapa do Ambiente Flávio Alves Contrução do Mapa do Ambiente: SMPA - SENSE / MODEL / PLAN / ACT Mapa do Ambiente Sebastian Thrun / CMU 6


7 Planejamento de Trajetórias SMPA - SENSE / MODEL / PLAN / ACT PLAN: A*, Dijkstra,... PROBLEMAS: Execução de Tarefas * Desvio de Obstáculos - Obstáculos conhecidos - Obstáculos desconhecidos (parados) - Obstáculos desconhecidos (em movimento) * Posicionamento - Qual a posição atual do robô? - Como garantir que após me deslocar ainda sei onde o robô está? - Erro e Imprecisão: Translação / Rotação 7
")


8 PROBLEMAS: Execução de Tarefas * Desvio de Obstáculos - Obstáculos conhecidos - Obstáculos desconhecidos (parados) - Obstáculos desconhecidos (em movimento) PROBLEMAS: Execução de Tarefas * Posicionamento - Qual a posição atual do robô? - Como garantir que após me deslocar ainda sei onde o robô está? - Erro e Imprecisão: Translação / Rotação Farlei Heinen 8

9 Temas Principais: Tipos de Robôs Sensores e Atuadores Inteligência & Robôs Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Mapas do Ambiente: Construção de Mapas Planejamento de Trajetórias SMPA - Sense Model Plan Act Problemas: Desvio de Obstáculos Posicionamento Soluções: Controle Robusto Híbrido Simulação - SimRob3D Controle Robusto Híbrido - SimRob3D 9


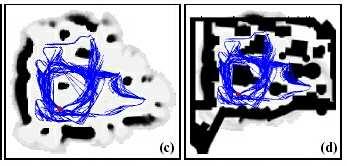
10 Controle Robusto Híbrido - SimRob3D Simulação com o SimRob3D Controle Robusto Híbrido - SimRob3D Simulação em Ambiente Estático com Localização Monte Carlo 10

11 Controle Robusto Híbrido - SimRob3D Simulação em Ambiente Estático com Localização Monte Carlo Controle Robusto Híbrido - SimRob3D Simulação em Ambiente Alterado em Relação a Representação Interna 11


12 Controle Robusto Híbrido - SimRob3D Simulação em Ambiente com Obstáculos Móveis Controle Robusto Híbrido - SimRob3D Relocalização com Monte Carlo 12


13 Controle Robusto Híbrido - SimRob3D Ambiente Tridimensional Complexo com Texturas Controle Robusto Híbrido - SimRob3D Ambiente Tridimensional Complexo com Texturas 13








14 Pesquisas em Desenvolvimento... Visão Computacional / Veículos Inteligentes Veículos Inteligentes Mini-Baja Buggy: Interfaces Profs. Kelber e Osório Joystick Telefone Celular Data Glove Reconhecimento de Gestos 14










15 Veículos Inteligentes Veículos Móveis: Protótipos - Prof. Kelber Rally de Veículos Móveis Autônomos Visão Computacional Detecção das Bordas da Pista Prof. Cláudio Jung Lane Follow 15


")


16 Visão Computacional Navegação Visual Prof. Fernando Osório Sequência de Imagens previamente Armazenadas (Rota de Navegação Visual) Correlação entre Imagens da BI e ICR Geração de Comando (set-point): Esquerda, Direita ou Avançar SWARM ROBOTICS Sistemas Multi-Robóticos 16







17 ROBOMBEIROS Arquiteturas Computacionais: Robombeiros Esquadrão de Robôs de combate a incêndio em Florestas Ambiente Virtual de Simulação 69 ROBOMBEIROS Arquiteturas Computacionais: Robombeiros Simulação de Incêndios Incêndios reais - Modelos de vegetação; - Propagação do fogo: tipo de vegetação, topografia do terreno, direção do vento; - Simulador 2D (grade) e Visualização 3D
, visando bloquear a propagação do fogo; - Considera o erro")



18 ROBOMBEIROS Arquiteturas Computacionais: Robombeiros Planejamento da Estratégia - Simulação 2D e Ambiente Virtual 3D (OSG/ODE); - Otimização das posições-chave de combate ao incêndio: Criação de um aceiro (zona livre de vegetação), visando bloquear a propagação do fogo; - Considera o erro de posicionamento GPS na criação do aceiro; - Uso de Algoritmos Genéticos. Algoritmo Genético: Fitness * Total de área queimada: busca minimizar a área queimada; * Total de área com aceiro: busca minimizar a área de trabalho dos robôs, e; * Distribuição de tarefas: busca minimizar a diferença entre a média geral de aceiros úteis em relação ao aceiro útil de cada indivíduo, assim, os tamanhos das áreas de trabalho individuais tendem a se equilibrar. 71 ROBOMBEIROS Robombeiros Navegação no Terreno 3D - Ambiente Virtual 3D (OSG); - Simulação física com biblioteca ODE; - Seguir a trajetória definida até atingir a posição-chave estabelecida; - Robôs-bombeiros com sensores: > GPS: posição e orientação > Sonares: proximidade de obstáculos > Sensor de temperatura - Desvio de obstáculos, mantendo a trajetória em direção a posição-alvo; - Uso de Redes Neurais Artificiais

19 Perspectivas Futuras... Perspectivas Futuras 23 Perspectivas Futuras Perspectivas Futuras Scientific American January 2007 Perspectivas Futuras 24 19






20 Perspectivas Futuras HUMA OIDS Sources of Inspiration: [EPFL] Perspectivas Futuras Perspectivas Futuras HUMA OIDS DROIDS FICTIO? Toyota i-foot Honda Asimo Perspectivas Futuras 20
, the central research organization of the US Department of Defense.")
![Stanley [Stanford - Sebastian Thrun] Boss [CMU - Tartan Racing] Winner of the 2005 DARPA Grand Challenge Winner of the 2007 DARPA Urban Challenge](/docs-images/62/48047714/images/21-1.jpg "Perspectivas Futuras 35 ew Trends - A OROBOTS Perspectivas Futuras [Published at IROS2006] IEEE Intelligent Robot and Systems Conference Claytronics -")
21 Perspectivas Futuras DARPA CHALLE GE (2005 Desert, 2007 Urban) The DARPA Grand Challenge is a prize competition for driverless cars, sponsored by the Defense Advanced Research Projects Agency (DARPA), the central research organization of the US Department of Defense. Stanley [Stanford - Sebastian Thrun] Boss [CMU - Tartan Racing] Winner of the 2005 DARPA Grand Challenge Winner of the 2007 DARPA Urban Challenge Perspectivas Futuras 35 ew Trends - A OROBOTS Perspectivas Futuras [Published at IROS2006] IEEE Intelligent Robot and Systems Conference Claytronics - Nanotech 21
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p ,
 Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
23/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
R bó b ti t ca M M vel I nt n e t ligent n e t : D S i S mul u ação à s A p A l p icações n o n
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Tópicos Especiais I - Jogos IA para Jogos
 Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes
Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Grécia antiga. Histórico. Grécia antiga. Histórico. Histórico. Introdução à Robótica História Prof. Douglas G. Macharet
 Grécia antiga Introdução à Robótica História Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Mitologia: Hefesto Filho de Zeus e Hera Considerado o deus da tecnologia, dos ferreiros, artesãos, metalurgia,...
Grécia antiga Introdução à Robótica História Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Mitologia: Hefesto Filho de Zeus e Hera Considerado o deus da tecnologia, dos ferreiros, artesãos, metalurgia,...
parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web:
 Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Protótipo de um robô rastreador de objetos. Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer
 Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Robótica Inteligente e Veículos Autônomos: Robótica Inteligente e Veículos Autônomos: Técnicas e Aplicações
 Unisinos PIPCA-GIA: GPVA : GRAPHIT / 2006 Prof.Dr.Christian PPG em Computação Aplicada -Robótica Inteligente Colaboradores: Alunos AdiléaWagner, Milton MScFarleiHeinen-farlei@unisinos.br Heinen, Cláudio
Unisinos PIPCA-GIA: GPVA : GRAPHIT / 2006 Prof.Dr.Christian PPG em Computação Aplicada -Robótica Inteligente Colaboradores: Alunos AdiléaWagner, Milton MScFarleiHeinen-farlei@unisinos.br Heinen, Cláudio
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Evoluindo Estratégias de Posicionamento em um Sistema Multi-Robótico Aplicado ao Combate de Incêndios Florestais
 Evoluindo Estratégias de Posicionamento em um Sistema Multi-Robótico Aplicado ao Combate de Incêndios Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnenmacher 3, Sandro Souza
Evoluindo Estratégias de Posicionamento em um Sistema Multi-Robótico Aplicado ao Combate de Incêndios Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnenmacher 3, Sandro Souza
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Prof. Dr. Alexandre da Silva Simões UNESP
 UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
GT-JeDi - Curso de Desenv. de Jogos IA para Jogos
 GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Temas Principais: Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,...
 3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada. EESC-USP M. Becker /78
 Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Desenvolvimento de um Ambiente para Simulação de Robótica Móvel em Áreas Florestais
 Desenvolvimento de um Ambiente para Simulação de Robótica Móvel em Áreas Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnemmacher 3, Sandro Souza Ferreira 3 1 PIPCA Universidade
Desenvolvimento de um Ambiente para Simulação de Robótica Móvel em Áreas Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnemmacher 3, Sandro Souza Ferreira 3 1 PIPCA Universidade
Robótica Móvel. Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Robótica Móvel Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 21/05/2018 Robôs móveis Robôs móveis são capazes de locomover-se no ambiente em que estão
Robótica Móvel Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 21/05/2018 Robôs móveis Robôs móveis são capazes de locomover-se no ambiente em que estão
Estacionamento de um Veículo de Forma Autônoma Utilizando Redes Neurais Artificiais
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Estacionamento de um Veículo de Forma Autônoma Utilizando Redes Neurais Artificiais
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Estacionamento de um Veículo de Forma Autônoma Utilizando Redes Neurais Artificiais
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas
 Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
IA Robótica Móvel I - Introdução
 IA I - Introdução Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 18 de Novembro de 2010 1 / 38 http://www.ic.unicamp.br/
IA I - Introdução Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 18 de Novembro de 2010 1 / 38 http://www.ic.unicamp.br/
Inteligência Artificial Agentes Inteligentes
 Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Utilizando Agentes Autônomos com Aprendizado para a Identificação e Combate de Incêndios em Áreas Florestais
 Utilizando Agentes Autônomos com Aprendizado para a Identificação e Combate de Incêndios em Áreas Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnemmacher 3, Sandro Souza Ferreira
Utilizando Agentes Autônomos com Aprendizado para a Identificação e Combate de Incêndios em Áreas Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnemmacher 3, Sandro Souza Ferreira
Concursos Micro-Rato. Ciber-Rato
 Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação
Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Redes Neurais (Inteligência Artificial)
") Redes Neurais (Inteligência Artificial) Aula 02 Agentes Inteligentes Edirlei Soares de Lima Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores
Redes Neurais (Inteligência Artificial) Aula 02 Agentes Inteligentes Edirlei Soares de Lima Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores
ANAIS SIMPÓSIO BRASILEIRO DE PESQUISA OPERACIONAL. Agentes Móveis. José Garcia Vivas Miranda
 ANAIS XLVI SIMPÓSIO BRASILEIRO DE PESQUISA OPERACIONAL Agentes Móveis José Garcia Vivas Miranda 3615 Teoria dos agentes Agentes: Definição Definido por Carl Hewitt (1977) Um agente é considerado uma abstração
ANAIS XLVI SIMPÓSIO BRASILEIRO DE PESQUISA OPERACIONAL Agentes Móveis José Garcia Vivas Miranda 3615 Teoria dos agentes Agentes: Definição Definido por Carl Hewitt (1977) Um agente é considerado uma abstração
Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc.
 baseados em inteligência Artificial MSc.") Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1 Roteiro
Veículos Robotizados: Sistemas Avançados de Assistência ao Motorista (ADAS) baseados em inteligência Artificial MSc. Diego Renan Bruno USP - Instituto de Ciências Matemáticas e de Computação 1 Roteiro
Inteligência Artificial: Introdução
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Inteligência Artificial: Introdução DCA0121 Inteligência Artificial Aplicada Daniel Enos / Heitor Medeiros
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Inteligência Artificial: Introdução DCA0121 Inteligência Artificial Aplicada Daniel Enos / Heitor Medeiros
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Uso de Realidade Virtual no Desenvolvimento de um Sistema de Controle do Estacionamento de Veículos Autônomos
 Uso de Realidade Virtual no Desenvolvimento de um Sistema de Controle do Estacionamento de Veículos Autônomos Milton Heinen 2, Fernando Osório 2, Farlei Heinen 3 e Christian Kelber 3 1 Universidade do
Uso de Realidade Virtual no Desenvolvimento de um Sistema de Controle do Estacionamento de Veículos Autônomos Milton Heinen 2, Fernando Osório 2, Farlei Heinen 3 e Christian Kelber 3 1 Universidade do
Modelos Baseados em Agentes. Agentes Reativos. Prof. André Campos Aula #4
 Modelos Baseados em Agentes Agentes Reativos Prof. André Campos Aula #4 Concepção de agentes Definir uma arquitetura para o agente Objetivo: especificar a forma na qual as propriedade de Autonomia Reação
Modelos Baseados em Agentes Agentes Reativos Prof. André Campos Aula #4 Concepção de agentes Definir uma arquitetura para o agente Objetivo: especificar a forma na qual as propriedade de Autonomia Reação
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Minicurso III Mineração de Dados Usando Algoritmos Bioinspirados: Conceitos Básicos e Aplicações Sala 1.04
 08h00 10h30 11h30 Hora Domingo, 18 de Setembro de 2011 - - - - - 10h30 - - 11h30 12h00-13h00 Intervalo para Almoço 13h00-13h30 13h30 14h30 15h30 16h30 - - 14h30 - - 15h30 - - 17h00 17h00-17h30 17h30-18h30
08h00 10h30 11h30 Hora Domingo, 18 de Setembro de 2011 - - - - - 10h30 - - 11h30 12h00-13h00 Intervalo para Almoço 13h00-13h30 13h30 14h30 15h30 16h30 - - 14h30 - - 15h30 - - 17h00 17h00-17h30 17h30-18h30
IF-705 Automação Inteligente Sistemas de Controle - Fundamentos
 IF-705 Automação Inteligente Sistemas de Controle - Fundamentos Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br
IF-705 Automação Inteligente Sistemas de Controle - Fundamentos Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br
Robótica Autônoma Sensores e Atuadores
 * Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
* Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
Protótipo de um Simulador de um Aspirador de Pó, Utilizando Algoritmo de Busca e Agentes Inteligentes, em Ambientes com Barreiras
 Protótipo de um Simulador de um Aspirador de Pó, Utilizando Algoritmo de Busca e Agentes Inteligentes, em Ambientes com Barreiras Jussara Vieira Ramos ROTEIRO Objetivo Introdução: I.A. X Robótica Agentes
Protótipo de um Simulador de um Aspirador de Pó, Utilizando Algoritmo de Busca e Agentes Inteligentes, em Ambientes com Barreiras Jussara Vieira Ramos ROTEIRO Objetivo Introdução: I.A. X Robótica Agentes
Inteligência Artificial
 Inteligência Artificial Professor Rafael Stubs Parpinelli E-mail: rafael.parpinelli@udesc.br udesc.academia.edu/rafaelstubsparpinelli www.researchgate.net/profile/rafael_parpinelli www.joinville.udesc.br/portal/professores/parpinelli/
Inteligência Artificial Professor Rafael Stubs Parpinelli E-mail: rafael.parpinelli@udesc.br udesc.academia.edu/rafaelstubsparpinelli www.researchgate.net/profile/rafael_parpinelli www.joinville.udesc.br/portal/professores/parpinelli/
O Simulador Ciber-Rato. e o. ƒ Concurso Ciber-Rato. Estrutura da Apresentação
 O Simulador Ciber-Rato e o Concurso Micro-Rato Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da
O Simulador Ciber-Rato e o Concurso Micro-Rato Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da
Metodologias de Inteligência Artificial 2005/2006
 Arquitecturas de Agentes Metodologias de Inteligência Artificial 2005/2006 Agente Reactivo Agentes Reactivos (Reflexivos): Não tem Estado interno see mapeia Estados do ambiente em Percepções: S P action
Arquitecturas de Agentes Metodologias de Inteligência Artificial 2005/2006 Agente Reactivo Agentes Reactivos (Reflexivos): Não tem Estado interno see mapeia Estados do ambiente em Percepções: S P action
INTELIGÊNCIA ARTIFICIAL
 Agentes Inteligentes Aula 3 Mestrado em Educação (em andamento) MBA em Negócios em Mídias Digitais MBA em Marketing e Vendas Especialista em games : Produção e Programação Bacharel em Sistema de Informação
Agentes Inteligentes Aula 3 Mestrado em Educação (em andamento) MBA em Negócios em Mídias Digitais MBA em Marketing e Vendas Especialista em games : Produção e Programação Bacharel em Sistema de Informação
CONTROLE DE TRAJETÓRIA DE UM ROBÔ MÓVEL COM TRAÇÃO DIFERENCIAL USANDO LÓGICA NEBULOSA
 CONTROLE DE TRAJETÓRIA DE UM ROBÔ MÓVEL COM TRAÇÃO DIFERENCIAL USANDO LÓGICA NEBULOSA Saulo Egberto Andreoti 1, Thainan Augustinho Menezes 1, Mário Eduardo Bordon 2 1, 2 DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CONTROLE DE TRAJETÓRIA DE UM ROBÔ MÓVEL COM TRAÇÃO DIFERENCIAL USANDO LÓGICA NEBULOSA Saulo Egberto Andreoti 1, Thainan Augustinho Menezes 1, Mário Eduardo Bordon 2 1, 2 DEPARTAMENTO DE ENGENHARIA ELÉTRICA
UNIVERSIDADE DO VALE DO RIO DOS SINOS. Programa Interdisciplinar de Pós-Graduação em. Computação Aplicada. Gustavo Pessin
 UNIVERSIDADE DO VALE DO RIO DOS SINOS Programa Interdisciplinar de Pós-Graduação em Computação Aplicada Gustavo Pessin Evolução de Estratégias e Controle Inteligente em Sistemas Multi-Robóticos Robustos
UNIVERSIDADE DO VALE DO RIO DOS SINOS Programa Interdisciplinar de Pós-Graduação em Computação Aplicada Gustavo Pessin Evolução de Estratégias e Controle Inteligente em Sistemas Multi-Robóticos Robustos
Accácio Ferreira dos Santos Neto
 Accácio Ferreira dos Santos Neto atuou como orientador do trabalho DESENVOLVIMENTO DE UM LABORATÓRIO REMOTO VIA WEB E ARDUINO PARA ENSINO DE CONTROLE AUTOMÁTICO, Accácio Ferreira dos Santos Neto atuou
Accácio Ferreira dos Santos Neto atuou como orientador do trabalho DESENVOLVIMENTO DE UM LABORATÓRIO REMOTO VIA WEB E ARDUINO PARA ENSINO DE CONTROLE AUTOMÁTICO, Accácio Ferreira dos Santos Neto atuou
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Edirlei Soares de Lima Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Edirlei Soares de Lima Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
Travel Wayfinding Cap. 6 Livro Bowman Cap. 7 Livro Bowman
 Tarefas Universais de Interação 3D 3D User Interfaces http://www.tecgraf.puc-rio.br/~abraposo/inf2791/ Aula 06 Travel e Wayfinding Alberto Raposo Tecgraf, Depto de Informática., PUC-Rio - Rio de Janeiro
Tarefas Universais de Interação 3D 3D User Interfaces http://www.tecgraf.puc-rio.br/~abraposo/inf2791/ Aula 06 Travel e Wayfinding Alberto Raposo Tecgraf, Depto de Informática., PUC-Rio - Rio de Janeiro
Utilizando Redes Neurais Artificiais no Controle de Robôs Móveis Aplicados ao Combate de Incêndios Florestais
 Utilizando Redes Neurais Artificiais no Controle de Robôs Móveis Aplicados ao Combate de Incêndios Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnemmacher 3, Sandro Souza
Utilizando Redes Neurais Artificiais no Controle de Robôs Móveis Aplicados ao Combate de Incêndios Florestais Gustavo Pessin 1, Fernando Osório 1, Soraia Musse 2, Vinícius Nonnemmacher 3, Sandro Souza
Roteiro Auto-Organização entre Robôs Móveis Cooperativos
 Roteiro Auto-Organização entre Robôs Móveis Cooperativos Aluno: Hélcio B. de Mello Professor: Markus Endler Motivação Comportamento básico Auto-organização Cooperação Conclusão 1 2 Motivação Motivação
Roteiro Auto-Organização entre Robôs Móveis Cooperativos Aluno: Hélcio B. de Mello Professor: Markus Endler Motivação Comportamento básico Auto-organização Cooperação Conclusão 1 2 Motivação Motivação
Viabilizando projetos. Jorge Augusto Lopes Gonçalves
 Viabilizando projetos Jorge Augusto Lopes Gonçalves Eu: Aluno de engenharia de computação - UFG. Entusiasta em vários projetos ligados a área de tecnologia e educação. Participação em torneios de robótica,
Viabilizando projetos Jorge Augusto Lopes Gonçalves Eu: Aluno de engenharia de computação - UFG. Entusiasta em vários projetos ligados a área de tecnologia e educação. Participação em torneios de robótica,