INTRODUÇÃO À ROBÓTICA MÓVEL
|
|
|
- Lorenzo Pedroso Araújo
- 6 Há anos
- Visualizações:
Transcrição


1 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 27 Edson Prestes Departamento de Informática Teórica
2 Localização É um componente essencial para um robô ser completamente autônomo. Se o robô não sabe sua posição no ambiente ele não pode realizar nenhuma tarefa de navegação A odometria por si só não é suficiente para ser usada como estimativa da posição do robô, pois o erro de estimativa cresce de forma ilimitada. Os principais algoritmos são baseados em processo de Filtragem de Kalman e de Bayes.
3 Localização O processo de auto-localização usando Filtro de Kalman considera que a postura do robô pode ser representada por uma distribuição gaussiana. Esta forma de estimação assume que a crença sobre a localização robô não possui ambiguidades. Portanto, a distribuição é sempre unimodal. Distribuições unimodais são particularmente importante em problemas de position tracking.
4 Localização Em position tracking, a postura inicial do robô é conhecida. As observações feitas pelo robô podem ser associadas de forma única com as características armazenadas no mapa do ambiente. Exemplo: se um robô sabe aproximadamente sua localização e detecta uma porta, ele pode determinar sua postura usando a informação sobre sua posição e a da porta, armazenada no mapa do ambiente. Figura extraída de [1]
5 Localização Se a incerteza sobre a postura do robô é alta então múltiplas portas armazenadas no mapa podem corresponder à porta observada pelo robô. Temos situações ambíguas. Logo, o método deve modela a postura do robô através de uma distribuição multi-modal. Problemas com esta característica são chamados de problemas de auto-localização global.

6 Localização Figura extraída de [1]
7 Localização Probabilística- Filtragem Bayesiana Seja X o espaço de estados do robô. Queremos estimar o estado x 2 X, que é sua postura corrente. Para isto é necessário estimar a seguinte probabilidade condicional (posterior probability) P(x(k) u(0:k 1), y(1:k)) que consiste na probabilidade de x(k) ser a postura real do robô dados u(0:k 1) e y(1:k), onde u(0:k-1) são as ações nos instantes de 0 a k-1; e y(1:k) são as observações feitas nos instantes de 1 a k. Observe que u e y são considerados de forma sincronizada, u(0), y(1), u(1), y(2), u(k-1),y(k)
8 Localização Probabilística- Filtragem Bayesiana A probabilidade posterior (detalhes em [1]) (1) Onde P(y(k) x(k)) é o modelo de observação, i.e., a probabilidade de observar y(k) na postura x(k). P(x(k) u(k-1), x(k-1)) é o modelo de movimento que pode ser visto como a probabilidade de transição de x(k-1) para x(k) após a aplicação da ação u(k-1). n(k) é a constante de normalização.
9 Localização Probabilística- Filtragem Bayesiana A equação (1) é um caso particular, que considera os estados discretos da seguinte equação (2) Onde P(y(k) x(k)) é o modelo de observação, i.e., a probabilidade de observar y(k) na postura x(k). P(x(k) u(k-1), x(k-1)) é o modelo de movimento que pode ser visto como a probabilidade de transição de x(k-1) para x(k) após a aplicação da ação u(k-1). n(k) é a constante de normalização.
10 Localização Probabilística- Filtragem Bayesiana Tanto a equação (1) quanto a equação (2), incorporam de forma conjunta os passos de predição e atualização, diferentemente da filtragem de Kalman. O passo de predição atualiza a probabilidade corrente da postura do robô, P(x(k-1) u(0:k-2),y(1:k-1)), usando a medida de odometria u(k-1). Estimado no instante k-1
11 Localização Probabilística- Filtragem Bayesiana O passo de atualização é executado quando o robô percebe uma medida y(k) com as informações sobre o ambiente no estado x(k). Isto é feito através do termo p(y(k) x(k)). Calculado no passo anterior onde

12 Localização Probabilística- Representação Resolução espacial : 10 ~30 cm Resolução angular : 2 ~10 graus Figura extraída de [1]
13 Localização Probabilística- Representação Algoritmo extraído de [1]
14 Localização Probabilística- Filtragem Bayesiana Muitas operações devem ser realizadas. Para aumentar a eficiência das linhas de 2-5, Fox et al [2] propuseram o seguinte algoritmo: desloca os dados de acordo com o movimento do robô O grid é convoluído com um kernel gaussiano. No caso bidimensional temos O eixo x, temos P'(x,y, µ)=0.5p((x,y, µ))+(0.25)(p((x-1,y,µ)) + P((x+1,y, µ)))
15 Localização Probabilística- Filtragem Bayesiana O processo é repetido para os eixos y e µ Em seguida, a observação y(i) é integrada no grid. Isto é feito multiplicando cada célula do grid pela probabilidade de observação, dado que o robô tem a postura correspondente àquela célula.

16 Localização Probabilística- Filtragem Bayesiana Figuras extraídas de [1]


17 Localização Probabilística- Filtragem Bayesiana Figuras extraídas de [1]
18 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Uma alternativa eficiente para representar e manter a PDF. É chamado de Localização Monte Carlo, Condensation, entre outros A idéia chave é representar a probabilidade posterior, P(x(k) u(0:k 1), y(1:k)) através de um conjunto de amostras. Cada amostra é um par (x,w) que contém uma hipótese candidata x sobre a postura do robô e um fator w que indica a adequação da hipótese em representar a postura real do robô.
19 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas
20 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Motion Model Figura extraída de [1]
21 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Sensor Model Figura extraída de [1]

22 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Figura extraída de [1]

23 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Figura extraída de [1]

24 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Figura extraída de [1]
25 Localização Probabilística- Filtragem Bayesiana Filtro de Partículas Como incorporar o Filtro de Partículas no Processo de Mapeamento de forma a desenvolver um método SLAM?
26 Particle Selection based on Potential Fields Particle filter method draws samples randomly in the free-space environment. This strategy has at least two disadvantages: All regions will have the same importance. The regions near the obstacles are improperly covered.
27 Particle Selection based on Potential Fields How to produce a good environment covering? How to minimize the number of particles keeping the filter convergence to the correct solution?
28 Particle Selection based on Potential Fields An initial tentative has been proposed by Kwon et al. They consider that the robot will always follow the topological edges of the environment freespace. The method samples particles around topological edges. The number of particles significantly diminishes.

29 Particle Selection based on Potential Fields This strategy is very efficient to dense environments. When the robot is in a sparse environment, the method fails. robot Sparse Regions Topological Edges The regions near the obstacles are improperly covered
30 Particle Selection based on Potential Fields How to solve this problem? By sampling particles near the walls. a) b) Depending on the sensor range, we can focus on different regions to draw particles
31 Particle Selection based on Potential Fields To determine the best navigational edges, we need The grid cells size (w cell ); The maximum robot distance from the walls (d robot ). We can consider only a small fraction of the sensor range as useful information, e.g., only 30% of the sonar returns. By using this information, we know the cells that will comprise navigational edges should be far from the nearest obstacles η = d robot /w cell

32 Particle Selection based on Potential Fields By shrinking the free-space cells through a thinning algorithm, we can determine the navigational edges. η = 1
33 Particle Selection based on Potential Fields By shrinking the free-space cells through a thinning algorithm, we can determine the navigational edges. η = 2
34 Particle Selection based on Potential Fields By shrinking the free-space cells through a thinning algorithm, we can determine the navigational edges. η = 4

35 Particle Selection based on Potential Fields By shrinking the free-space cells through a thinning algorithm, we can determine the navigational edges. η = 10

36 Particle Selection based on Potential Fields By shrinking the free-space cells through a thinning algorithm, we can determine the navigational edges. η = 17
37 Particle Selection based on Potential Fields By shrinking the free-space cells through a thinning algorithm, we can determine the navigational edges. Final Skeleton (The result produced by Kwon s methods)
 as half of the sensors range High potential (1) Intermediary potential (0.5) Low potential (0.")
38 Particle Selection based on Potential Fields By considering the maximum robot s distance from the walls (d robot ) as half of the sensors range High potential (1) Intermediary potential (0.5) Low potential (0.0)
 is the potential stored in the cell")
39 Particle Selection based on Potential Fields The probability that a cell r is selected to generate one particle Where c is a constant and p( r ) is the potential stored in the cell r

40 Results Uniform distribution samples particles in regions that will not help the robot in the localization. Kwon s method samples most of the particles in the sparse regions. The method proposed produces the best covering. Green cells Uniform distribution Red cells Method proposed Sparse Regions Lilac cells Kwon methods
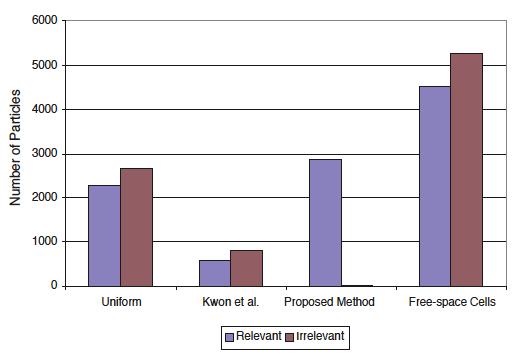
41 Results




42 Connected dense environment The environment has 10m x 10m. The robot can sense any obstacle at maximum distance of 2m. Environment 10m x 10m Sensor Range 2m

 Sensor Range")
43 Connected sparse environment 30m (a) 24m (c) (b) (a) Sensor Range 2m (b) (c)



44 Non-Connected Sparse Environment The environment has 10m x 10m. The robot can sense any obstacle at maximum distance of 2m. 30m 24m Sensor Range 2m


45 Adding information using the robot motion Robot motion and sensor readings are used to provide an initial particle orientation. The initial orientation is determined from the vector field computed from the intermediary skeleton.
![Final Results Método publicado em [3] e [4].](/docs-images/65/52839747/images/46-1.jpg "Percentage of successful localizations.")

46 Final Results Método publicado em [3] e [4]. Percentage of successful localizations. For each initial particle distribution and number of particles the convergence rate without and with orientation of the particles is given.
47 BIBLIOGRAFIA [1] Choset, H., Lynch, K., Hutchinson, S., Kantor, G., Burgard, W., Kavraki, L., Thrun, S. Principles of Robot Motion : Theory, Algorithms, and Implementations. MIT Press [2] D. Fox, W. Burgard and S. Thrun. Markov Localization for mobile robots in dynamic environments. Journal of Artificial Intelligence Research (JAIR), 11: , 1999 [3] SILVA JÚNIOR, E. P., Ritt, M., Fuhr, GImproved Particle Filter for Sparse Environments Accepted for publication in the Special Issue Intelligent Robotic Systems of the Journal of the Brazilian Computer Society, [4] SILVA JÚNIOR, E. P., RITT, M., FUHR, G. Improving Monte Carlo Localization in Sparse Environments using Structural Environment Information. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 2008.
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
15/05/2013. Localização I. Localização. Localização: classificação. Localização: classificação. Tipo de ambiente. Ambiente dinâmico - soluções
 SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
SLAM II Localização e Mapeamento Simulatâneos
 SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros Sistemas de Localização Bibliografia Recomendada
 Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
IMPLEMENTAÇÃO E ANÁLISE DE LOCALIZAÇÃO EM ROBÓTICA MÓVEL POR FILTRO DE KALMAN
 IMPLEMENTAÇÃO E ANÁLISE DE LOCALIZAÇÃO EM ROBÓTICA MÓVEL POR FILTRO DE KALMAN Claudiney Calixto da Silva (PG), Juliano Augusto Pereira (PG) Divisão de Ciência da Computação - Instituto Tecnológico de Aeronáutica
IMPLEMENTAÇÃO E ANÁLISE DE LOCALIZAÇÃO EM ROBÓTICA MÓVEL POR FILTRO DE KALMAN Claudiney Calixto da Silva (PG), Juliano Augusto Pereira (PG) Divisão de Ciência da Computação - Instituto Tecnológico de Aeronáutica
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
3 Filtro de Kalman Discreto
 3 Filtro de Kalman Discreto As medidas realizadas por sensores estão sujeitas a erros, como pode ser visto no Capítulo 2. Os filtros são aplicados aos sinais medidos pelos sensores para reduzir os erros,
3 Filtro de Kalman Discreto As medidas realizadas por sensores estão sujeitas a erros, como pode ser visto no Capítulo 2. Os filtros são aplicados aos sinais medidos pelos sensores para reduzir os erros,
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Odometria and Métodos de Dead-Reckoning Odometria permite boa
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Odometria and Métodos de Dead-Reckoning Odometria permite boa
Um robô está num corredor. Ele possui um mapa do corredor mas não sabe onde está localizado. A parede do corredor e indistinta, exceto pelas portas.
 Um robô está num corredor. Ele possui um mapa do corredor mas não sabe onde está localizado. A parede do corredor e indistinta, exceto pelas portas. O corredor possui 3 portas idênticas, exceto pelas sua
Um robô está num corredor. Ele possui um mapa do corredor mas não sabe onde está localizado. A parede do corredor e indistinta, exceto pelas portas. O corredor possui 3 portas idênticas, exceto pelas sua
Transmitir aos alunos conhecimentos sobre robótica fixa e móvel, visando capacitá-los a desenvolver
 DISCIPLINA: ELE228 - Robótica A Créditos: 4 Caráter: Eletiva UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PROGRAMA DE PÓS-GRADUAÇÃO
DISCIPLINA: ELE228 - Robótica A Créditos: 4 Caráter: Eletiva UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PROGRAMA DE PÓS-GRADUAÇÃO
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 18 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Planejamento de Caminhos O problema de planejamento de caminhos
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 18 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Planejamento de Caminhos O problema de planejamento de caminhos
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Introdução. Introdução Exemplo. Introdução. Representação do Ambiente Exemplo. Representação do Ambiente. Mapeamento e Localização Simultâneos
 Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
Conversação Para Viagem - Inglês (Michaelis Tour) (Portuguese Edition)
 (Portuguese Edition)") Conversação Para Viagem - Inglês (Michaelis Tour) (Portuguese Edition) Antonio Carlos Vilela Click here if your download doesn"t start automatically Conversação Para Viagem - Inglês (Michaelis Tour) (Portuguese
Conversação Para Viagem - Inglês (Michaelis Tour) (Portuguese Edition) Antonio Carlos Vilela Click here if your download doesn"t start automatically Conversação Para Viagem - Inglês (Michaelis Tour) (Portuguese
PL/SQL: Domine a linguagem do banco de dados Oracle (Portuguese Edition)
") PL/SQL: Domine a linguagem do banco de dados Oracle (Portuguese Edition) Eduardo Gonçalves Click here if your download doesn"t start automatically PL/SQL: Domine a linguagem do banco de dados Oracle (Portuguese
PL/SQL: Domine a linguagem do banco de dados Oracle (Portuguese Edition) Eduardo Gonçalves Click here if your download doesn"t start automatically PL/SQL: Domine a linguagem do banco de dados Oracle (Portuguese
Meditacao da Luz: O Caminho da Simplicidade
 Meditacao da Luz: O Caminho da Simplicidade Leonardo Boff Click here if your download doesn"t start automatically Meditacao da Luz: O Caminho da Simplicidade Leonardo Boff Meditacao da Luz: O Caminho da
Meditacao da Luz: O Caminho da Simplicidade Leonardo Boff Click here if your download doesn"t start automatically Meditacao da Luz: O Caminho da Simplicidade Leonardo Boff Meditacao da Luz: O Caminho da
UM CONTROLADOR PARA ROBÔS MÓVEIS BASEADO EM NUVEM DE PARTÍCULAS
 UM CONTROLADOR PARA ROBÔS MÓVEIS BASEADO EM NUVEM DE PARTÍCULAS Jorge Augusto Vasconcelos Alves, Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica Av Osvaldo
UM CONTROLADOR PARA ROBÔS MÓVEIS BASEADO EM NUVEM DE PARTÍCULAS Jorge Augusto Vasconcelos Alves, Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica Av Osvaldo
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA
 ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
Mapeamento de ambientes e processamento visual utilizando Kinect
 Mapeamento de ambientes e processamento visual utilizando Kinect Mário Alberto Cecchi Raduan Bolsista PIBIC/UFRJ Orientador: Adriano Joaquim de Oliveira Cruz, PhD Laboratório de Inteligência Computacional
Mapeamento de ambientes e processamento visual utilizando Kinect Mário Alberto Cecchi Raduan Bolsista PIBIC/UFRJ Orientador: Adriano Joaquim de Oliveira Cruz, PhD Laboratório de Inteligência Computacional
IMPLEMENTAÇÃO DO DP-SLAM EM TEMPO REAL PARA ROBÔS MÓVEIS USANDO SENSORES ESPARSOS
 IMPLEMENTAÇÃO DO DP-SLAM EM TEMPO REAL PARA ROBÔS MÓVEIS USANDO SENSORES ESPARSOS VITOR CAMPANHOLO GUIZILINI, JUN OKAMOTO JR., FABIANO ROGÉRIO CORREA, VALDIR GRASSI JR. Escola Politécnica da Universidade
IMPLEMENTAÇÃO DO DP-SLAM EM TEMPO REAL PARA ROBÔS MÓVEIS USANDO SENSORES ESPARSOS VITOR CAMPANHOLO GUIZILINI, JUN OKAMOTO JR., FABIANO ROGÉRIO CORREA, VALDIR GRASSI JR. Escola Politécnica da Universidade
Uma introdução à indecilibidade a forma máxima de complexidade!
 Uma introdução à indecilibidade a forma máxima de complexidade! Como qualquer outra ferramenta, computadores tem capacidades e limitações que devem ser entendidas para seu bom uso. 1 Um problema indecidível:
Uma introdução à indecilibidade a forma máxima de complexidade! Como qualquer outra ferramenta, computadores tem capacidades e limitações que devem ser entendidas para seu bom uso. 1 Um problema indecidível:
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Emparelhamento-Filtragem na Localização de Robots Móveis
 O ciclo Predição-Emparelhamento Emparelhamento-Filtragem na Localização de Robots Móveis Maria Isabel Ribeiro Instituto Superior Técnico Instituto de Sistemas e Robótica mir@isr.ist.utl.pt Outubro de 1999
O ciclo Predição-Emparelhamento Emparelhamento-Filtragem na Localização de Robots Móveis Maria Isabel Ribeiro Instituto Superior Técnico Instituto de Sistemas e Robótica mir@isr.ist.utl.pt Outubro de 1999
Receitas na Pressão - Vol. 01: 50 Receitas para Panela de Pressão Elétrica (Portuguese Edition)
") Receitas na Pressão - Vol. 01: 50 Receitas para Panela de Pressão Elétrica (Portuguese Edition) Click here if your download doesn"t start automatically Receitas na Pressão - Vol. 01: 50 Receitas para Panela
Receitas na Pressão - Vol. 01: 50 Receitas para Panela de Pressão Elétrica (Portuguese Edition) Click here if your download doesn"t start automatically Receitas na Pressão - Vol. 01: 50 Receitas para Panela
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
PMR 5237 Modelagem e Design de Sistemas Discretos em Redes de Petri
 PMR 5237 Modelagem e Design de Sistemas Discretos em Redes de Petri Aula 9: Redes Coloridas e Extensões reinaldo@usp.br 1 Modelagem e análise em Redes Colorida/Alto Nível I modelagem em CPN/HLPN análise
PMR 5237 Modelagem e Design de Sistemas Discretos em Redes de Petri Aula 9: Redes Coloridas e Extensões reinaldo@usp.br 1 Modelagem e análise em Redes Colorida/Alto Nível I modelagem em CPN/HLPN análise
APLICAÇÃO DO FILTRO DE KALMAN A UM SISTEMA DE POSICIONAMENTO DE VEÍCULO AQUÁTICO
 APLICAÇÃO DO FILTRO DE KALMAN A UM SISTEMA DE POSICIONAMENTO DE VEÍCULO AQUÁTICO André TEIXEIRA DE AQUINO; André LUIZ CARNEIRO DE ARAÚJO (1) Instituto Federal de Educação, Ciência e Tecnologia do Ceará,
APLICAÇÃO DO FILTRO DE KALMAN A UM SISTEMA DE POSICIONAMENTO DE VEÍCULO AQUÁTICO André TEIXEIRA DE AQUINO; André LUIZ CARNEIRO DE ARAÚJO (1) Instituto Federal de Educação, Ciência e Tecnologia do Ceará,
Implementação do Filtro de Kalman Estendido
 UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
UNIVERSIDADE FEDERAL DA GRANDE DOURADOS UFGD FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA FACET DISCIPLINA: Tópicos em Robótica Móvel PROFESSORA: Drª Valguima Odakura ACADÊMICOS: Aline Izida e Diogo Fernando
BAT SEARCH ALGORITHM APLICADO NA LOCALIZAÇÃO DE ROBÔS MÓVEIS
 BAT SEARCH ALGORITHM APLICADO NA LOCALIZAÇÃO DE ROBÔS MÓVEIS Lara Furtado, Wolmar Araujo Neto, Alexandre Menezes, Ivo Chaves da Silva Junior, Leonardo Rocha Olivi, André Luís Marques Marcato Departamento
BAT SEARCH ALGORITHM APLICADO NA LOCALIZAÇÃO DE ROBÔS MÓVEIS Lara Furtado, Wolmar Araujo Neto, Alexandre Menezes, Ivo Chaves da Silva Junior, Leonardo Rocha Olivi, André Luís Marques Marcato Departamento
MySQL: Comece com o principal banco de dados open source do mercado (Portuguese Edition)
") MySQL: Comece com o principal banco de dados open source do mercado (Portuguese Edition) Click here if your download doesn"t start automatically MySQL: Comece com o principal banco de dados open source
MySQL: Comece com o principal banco de dados open source do mercado (Portuguese Edition) Click here if your download doesn"t start automatically MySQL: Comece com o principal banco de dados open source
PCS 5869 INTELIGÊNCIA ARTIFICIAL
 PCS 5869 INTELIGÊNCIA ARTIFICIAL 1º Quadrimestre de 2016 Rodolfo Valiente Romero Seminário PCS-5743I Artigo http://dx.doi.org/10.1016/j.engappai.2014.08.015 A learning-based thresholding method customizable
PCS 5869 INTELIGÊNCIA ARTIFICIAL 1º Quadrimestre de 2016 Rodolfo Valiente Romero Seminário PCS-5743I Artigo http://dx.doi.org/10.1016/j.engappai.2014.08.015 A learning-based thresholding method customizable
XIII Simpósio Brasileiro de Automação Inteligente Porto Alegre RS, 1 o 4 de Outubro de 2017
 FILTRO DE KALMAN ESTENDIDO BASEADO EM VISÃO COMPUTACIONAL E ODOMETRIA APLICADO À LOCALIZAÇÃO DE ROBÔS MÓVEIS Fabrício de Oliveira Coelho, João Pedro Carvalho de Souza, Milena Faria Pinto, Guilherme Marins
FILTRO DE KALMAN ESTENDIDO BASEADO EM VISÃO COMPUTACIONAL E ODOMETRIA APLICADO À LOCALIZAÇÃO DE ROBÔS MÓVEIS Fabrício de Oliveira Coelho, João Pedro Carvalho de Souza, Milena Faria Pinto, Guilherme Marins
Instituto Tecnológico de Aeronáutica
 Instituto Tecnológico de Aeronáutica Programa de Pós-Graduação em Engenharia de Infraestrutura Aeronáutica Programa de Pós-Graduação em Engenharia Aeronáutica e Mecânica Prova de Seleção 2 o semestre de
Instituto Tecnológico de Aeronáutica Programa de Pós-Graduação em Engenharia de Infraestrutura Aeronáutica Programa de Pós-Graduação em Engenharia Aeronáutica e Mecânica Prova de Seleção 2 o semestre de
Assim, a rápida acumulação de erros pequenos pode causar o fracasso de quase todos os métodos para resolver o problema de SLAM.
 1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
IA Robótica Móvel II - Locomoção e Localização
 Planejamento para IA Robótica Móvel II - e Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 23 de Novembro de 2010 1 /
Planejamento para IA Robótica Móvel II - e Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 23 de Novembro de 2010 1 /
Minhas lembranças de Leminski (Portuguese Edition)
") Minhas lembranças de Leminski (Portuguese Edition) Domingos Pellegrini Click here if your download doesn"t start automatically Minhas lembranças de Leminski (Portuguese Edition) Domingos Pellegrini Minhas
Minhas lembranças de Leminski (Portuguese Edition) Domingos Pellegrini Click here if your download doesn"t start automatically Minhas lembranças de Leminski (Portuguese Edition) Domingos Pellegrini Minhas
Mapeamento robótico. Mapeamento semântico. Metodologia. Maquinas de vetores de suporte. Maquinas de vetores de suporte. Modelos ocultos de Markov
 Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO
 UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO Alan Porto Bontempo, Marley Vellasco e Karla Figueiredo* Pontifícia Universidade
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEMANETO SIMULTÂNEOS PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO Alan Porto Bontempo, Marley Vellasco e Karla Figueiredo* Pontifícia Universidade
América Andina: integração regional, segurança e outros olhares (Portuguese Edition)
") América Andina: integração regional, segurança e outros olhares (Portuguese Edition) Renata Peixoto de Oliveira, Silvia Garcia Nogueira, Filipe Reis Melo Click here if your download doesn"t start automatically
América Andina: integração regional, segurança e outros olhares (Portuguese Edition) Renata Peixoto de Oliveira, Silvia Garcia Nogueira, Filipe Reis Melo Click here if your download doesn"t start automatically
Endomarketing de A a Z (Portuguese Edition) By Analisa de Medeiros Brum
 By Analisa de Medeiros Brum") Endomarketing de A a Z (Portuguese Edition) By Analisa de Medeiros Brum Endomarketing de A a Z (Portuguese Edition) By Analisa de Medeiros Brum Em Endomarketing de A a Z, a publicitária, consultora e palestrante
Endomarketing de A a Z (Portuguese Edition) By Analisa de Medeiros Brum Endomarketing de A a Z (Portuguese Edition) By Analisa de Medeiros Brum Em Endomarketing de A a Z, a publicitária, consultora e palestrante
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
7 Conclusões e desenvolvimentos futuros
 7 Conclusões e desenvolvimentos futuros 7.1 Conclusões Este trabalho apresentou novas soluções para a determinação da posição de terminais de comunicações móveis com base em medidas de ToA. Nos métodos
7 Conclusões e desenvolvimentos futuros 7.1 Conclusões Este trabalho apresentou novas soluções para a determinação da posição de terminais de comunicações móveis com base em medidas de ToA. Nos métodos
Comportamento Organizacional: O Comportamento Humano no Trabalho (Portuguese Edition)
") Comportamento Organizacional: O Comportamento Humano no Trabalho (Portuguese Edition) John W. Newstrom Click here if your download doesn"t start automatically Comportamento Organizacional: O Comportamento
Comportamento Organizacional: O Comportamento Humano no Trabalho (Portuguese Edition) John W. Newstrom Click here if your download doesn"t start automatically Comportamento Organizacional: O Comportamento
O PRíNCIPE FELIZ E OUTRAS HISTóRIAS (EDIçãO BILíNGUE) (PORTUGUESE EDITION) BY OSCAR WILDE
 (PORTUGUESE EDITION) BY OSCAR WILDE") Read Online and Download Ebook O PRíNCIPE FELIZ E OUTRAS HISTóRIAS (EDIçãO BILíNGUE) (PORTUGUESE EDITION) BY OSCAR WILDE DOWNLOAD EBOOK : O PRíNCIPE FELIZ E OUTRAS HISTóRIAS (EDIçãO Click link bellow and
Read Online and Download Ebook O PRíNCIPE FELIZ E OUTRAS HISTóRIAS (EDIçãO BILíNGUE) (PORTUGUESE EDITION) BY OSCAR WILDE DOWNLOAD EBOOK : O PRíNCIPE FELIZ E OUTRAS HISTóRIAS (EDIçãO Click link bellow and
Transcript name: 1. Introduction to DB2 Express-C
 Transcript name: 1. Introduction to DB2 Express-C Transcript name: 1. Introduction to DB2 Express-C Welcome to the presentation Introduction to DB2 Express-C. In this presentation we answer 3 questions:
Transcript name: 1. Introduction to DB2 Express-C Transcript name: 1. Introduction to DB2 Express-C Welcome to the presentation Introduction to DB2 Express-C. In this presentation we answer 3 questions:
Dermatologia Clínica. Guia Colorido Para Diagnostico e Tratamento (Em Portuguese do Brasil)
") Dermatologia Clínica. Guia Colorido Para Diagnostico e Tratamento (Em Portuguese do Brasil) Click here if your download doesn"t start automatically Dermatologia Clínica. Guia Colorido Para Diagnostico
Dermatologia Clínica. Guia Colorido Para Diagnostico e Tratamento (Em Portuguese do Brasil) Click here if your download doesn"t start automatically Dermatologia Clínica. Guia Colorido Para Diagnostico
As 100 melhores piadas de todos os tempos (Portuguese Edition)
") As 100 melhores piadas de todos os tempos (Portuguese Edition) Click here if your download doesn"t start automatically As 100 melhores piadas de todos os tempos (Portuguese Edition) As 100 melhores piadas
As 100 melhores piadas de todos os tempos (Portuguese Edition) Click here if your download doesn"t start automatically As 100 melhores piadas de todos os tempos (Portuguese Edition) As 100 melhores piadas
Google Android: crie aplicações para celulares e tablets (Portuguese Edition)
") Google Android: crie aplicações para celulares e tablets (Portuguese Edition) João Bosco Monteiro Click here if your download doesn"t start automatically Google Android: crie aplicações para celulares
Google Android: crie aplicações para celulares e tablets (Portuguese Edition) João Bosco Monteiro Click here if your download doesn"t start automatically Google Android: crie aplicações para celulares
 LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN ESTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN ESTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
ALGORITMO DE OTIMIZAÇÃO PARA LOCALIZAÇÃO GLOBAL DE ROBÔS MÓVEIS EM AMBIENTES CONHECIDOS
 ALGORITMO DE OTIMIZAÇÃO PARA LOCALIZAÇÃO GLOBAL DE ROBÔS MÓVEIS EM AMBIENTES CONHECIDOS Caroline P. Carvalho, Eduardo R. Rohr, Luís Fernando A. Pereira, Sérgio L. Haffner Pontifícia Universidade Católica
ALGORITMO DE OTIMIZAÇÃO PARA LOCALIZAÇÃO GLOBAL DE ROBÔS MÓVEIS EM AMBIENTES CONHECIDOS Caroline P. Carvalho, Eduardo R. Rohr, Luís Fernando A. Pereira, Sérgio L. Haffner Pontifícia Universidade Católica
Medicina Integrativa - A Cura pelo Equilíbrio (Portuguese Edition)
") Medicina Integrativa - A Cura pelo Equilíbrio (Portuguese Edition) Click here if your download doesn"t start automatically Medicina Integrativa - A Cura pelo Equilíbrio (Portuguese Edition) Medicina Integrativa
Medicina Integrativa - A Cura pelo Equilíbrio (Portuguese Edition) Click here if your download doesn"t start automatically Medicina Integrativa - A Cura pelo Equilíbrio (Portuguese Edition) Medicina Integrativa
VGM. VGM information. ALIANÇA VGM WEB PORTAL USER GUIDE June 2016
 Overview The Aliança VGM Web portal is an application that enables you to submit VGM information directly to Aliança via our e-portal Web page. You can choose to enter VGM information directly, or to download
Overview The Aliança VGM Web portal is an application that enables you to submit VGM information directly to Aliança via our e-portal Web page. You can choose to enter VGM information directly, or to download
Provably Good Quality Multi-triangulation of Surfaces
 Provably Good Quality Multi-triangulation of Surfaces Esdras Medeiros (Departamento de Matemática - UFC) and Marcelo Siqueira (DIMAP - UFRN) Luiz Velho 60-2017 IMPA, Rio de Janeiro, RJ, Brazil 1 Manifold
Provably Good Quality Multi-triangulation of Surfaces Esdras Medeiros (Departamento de Matemática - UFC) and Marcelo Siqueira (DIMAP - UFRN) Luiz Velho 60-2017 IMPA, Rio de Janeiro, RJ, Brazil 1 Manifold
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Pesquisa Qualitativa do Início ao Fim (Métodos de Pesquisa) (Portuguese Edition)
 (Portuguese Edition)") Pesquisa Qualitativa do Início ao Fim (Métodos de Pesquisa) (Portuguese Edition) Robert K. Yin Click here if your download doesn"t start automatically Pesquisa Qualitativa do Início ao Fim (Métodos de
Pesquisa Qualitativa do Início ao Fim (Métodos de Pesquisa) (Portuguese Edition) Robert K. Yin Click here if your download doesn"t start automatically Pesquisa Qualitativa do Início ao Fim (Métodos de
ATLAS DE ACUPUNTURA VETERINáRIA. CãES E GATOS (EM PORTUGUESE DO BRASIL) BY CHOO HYUNG KIM
 BY CHOO HYUNG KIM") Read Online and Download Ebook ATLAS DE ACUPUNTURA VETERINáRIA. CãES E GATOS (EM PORTUGUESE DO BRASIL) BY CHOO HYUNG KIM DOWNLOAD EBOOK : ATLAS DE ACUPUNTURA VETERINáRIA. CãES E GATOS Click link bellow
Read Online and Download Ebook ATLAS DE ACUPUNTURA VETERINáRIA. CãES E GATOS (EM PORTUGUESE DO BRASIL) BY CHOO HYUNG KIM DOWNLOAD EBOOK : ATLAS DE ACUPUNTURA VETERINáRIA. CãES E GATOS Click link bellow
Adoção: guia prático doutrinário e processual com as alterações da Lei n , de 3/8/2009 (Portuguese Edition)
") Adoção: guia prático doutrinário e processual com as alterações da Lei n. 12010, de 3/8/2009 (Portuguese Edition) Luiz Antonio Miguel Ferreira Click here if your download doesn"t start automatically Adoção:
Adoção: guia prático doutrinário e processual com as alterações da Lei n. 12010, de 3/8/2009 (Portuguese Edition) Luiz Antonio Miguel Ferreira Click here if your download doesn"t start automatically Adoção:
PROJETO DE INTERFACES PARA ÁLGEBRA DE MAPAS EM GEOPROCESSAMENTO NO AMBIENTE SPRING
 MINISTÉRIO DA CIÊNCIA E TECNOLOGIA INSTITUTO NACIONAL DE PESQUISAS ESPACIAIS INPE-9307-TDI/820 PROJETO DE INTERFACES PARA ÁLGEBRA DE MAPAS EM GEOPROCESSAMENTO NO AMBIENTE SPRING Ivan Soares de Lucena Dissertação
MINISTÉRIO DA CIÊNCIA E TECNOLOGIA INSTITUTO NACIONAL DE PESQUISAS ESPACIAIS INPE-9307-TDI/820 PROJETO DE INTERFACES PARA ÁLGEBRA DE MAPAS EM GEOPROCESSAMENTO NO AMBIENTE SPRING Ivan Soares de Lucena Dissertação
Gerenciamento Pelas Diretrizes (Portuguese Edition)
") Gerenciamento Pelas Diretrizes (Portuguese Edition) Vicente Falconi Click here if your download doesn"t start automatically Gerenciamento Pelas Diretrizes (Portuguese Edition) Vicente Falconi Gerenciamento
Gerenciamento Pelas Diretrizes (Portuguese Edition) Vicente Falconi Click here if your download doesn"t start automatically Gerenciamento Pelas Diretrizes (Portuguese Edition) Vicente Falconi Gerenciamento
Atividade extra. Questão 01. Lingua Estrangeira Inglês
 Atividade extra Leonard G Questão 01 Fonte: http://pt.wikipedia.org/wiki/ficheiro:danishwindturbines.jpg The way we live our lives is hurting the Earth s ecological system. Mass production in factories,
Atividade extra Leonard G Questão 01 Fonte: http://pt.wikipedia.org/wiki/ficheiro:danishwindturbines.jpg The way we live our lives is hurting the Earth s ecological system. Mass production in factories,
LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO FILTRO DE KALMAN EXTENDIDO
 LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN EXTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
LOCALIZAÇÃO DE UM ROBÔ MÓVEL BASEADA EM ODOMETRIA E MARCOS NATURAIS UTILIZANDO ILTRO DE KALMAN EXTENDIDO André M. Santana, Adelardo A.D. Medeiros Departamento de Engenharia de Computação e Automação -
Vaporpunk - A fazenda-relógio (Portuguese Edition)
") Vaporpunk - A fazenda-relógio (Portuguese Edition) Octavio Aragão Click here if your download doesn"t start automatically Vaporpunk - A fazenda-relógio (Portuguese Edition) Octavio Aragão Vaporpunk - A
Vaporpunk - A fazenda-relógio (Portuguese Edition) Octavio Aragão Click here if your download doesn"t start automatically Vaporpunk - A fazenda-relógio (Portuguese Edition) Octavio Aragão Vaporpunk - A
Os 7 Hábitos das Pessoas Altamente Eficazes (Portuguese Edition)
") Os 7 Hábitos das Pessoas Altamente Eficazes (Portuguese Edition) Click here if your download doesn"t start automatically Os 7 Hábitos das Pessoas Altamente Eficazes (Portuguese Edition) Os 7 Hábitos das
Os 7 Hábitos das Pessoas Altamente Eficazes (Portuguese Edition) Click here if your download doesn"t start automatically Os 7 Hábitos das Pessoas Altamente Eficazes (Portuguese Edition) Os 7 Hábitos das
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
Recuperação de Informação em Bases de Texto
 Recuperação de Informação em Bases de Texto Mestrado em Engenharia Informática Universidade de Évora 2010/2011 Paulo Quaresma pq@di.uevora.pt http://www.moodle.uevora.pt 1 Objectivos Programa Avaliação
Recuperação de Informação em Bases de Texto Mestrado em Engenharia Informática Universidade de Évora 2010/2011 Paulo Quaresma pq@di.uevora.pt http://www.moodle.uevora.pt 1 Objectivos Programa Avaliação
10/11/ : Navegação Robótica. .: Sistema de Localização
 Localização Relativa de um Robô Humanóide Utilizando Filtro de Kalman Estendido André M. Santana 1, Kelson R. T. Aires 1, Adelardo A. D. Medeiros 2 1 Departamento de Informática e Estatística (DIE) Universidade
Localização Relativa de um Robô Humanóide Utilizando Filtro de Kalman Estendido André M. Santana 1, Kelson R. T. Aires 1, Adelardo A. D. Medeiros 2 1 Departamento de Informática e Estatística (DIE) Universidade
Arquitetura%Híbrida%para%Robôs%Móveis%Baseada%em% Funções%de%Navegação%com%Interação%Humana%
 Arquitetura%Híbrida%para%Robôs%Móveis%Baseada%em% Funções%de%Navegação%com%Interação%Humana% Prof.%Dr.%Valdir%Grassi%Junior% Depto.%de%Engenharia%Elétrica% EESC/USP% Estrutura%da%Apresentação% Introdução%
Arquitetura%Híbrida%para%Robôs%Móveis%Baseada%em% Funções%de%Navegação%com%Interação%Humana% Prof.%Dr.%Valdir%Grassi%Junior% Depto.%de%Engenharia%Elétrica% EESC/USP% Estrutura%da%Apresentação% Introdução%
DEPARTAMENTO DE ENGENHARIA CIVIL E ARQUITETURA
 SCHOOL YEAR 01/013 1 ST EXAM 013/01/16 08h00 DURATION: h00 THEORY QUESTIONS (maximum 45 minutes) 1. In a pumped trunk main system explain why the smallest technically viable diameter may not be the least
SCHOOL YEAR 01/013 1 ST EXAM 013/01/16 08h00 DURATION: h00 THEORY QUESTIONS (maximum 45 minutes) 1. In a pumped trunk main system explain why the smallest technically viable diameter may not be the least
Ganhar Dinheiro Em Network Marketing (Portuguese Edition)
") Ganhar Dinheiro Em Network Marketing (Portuguese Edition) Click here if your download doesn"t start automatically Ganhar Dinheiro Em Network Marketing (Portuguese Edition) Ganhar Dinheiro Em Network Marketing
Ganhar Dinheiro Em Network Marketing (Portuguese Edition) Click here if your download doesn"t start automatically Ganhar Dinheiro Em Network Marketing (Portuguese Edition) Ganhar Dinheiro Em Network Marketing
APLICAÇÃO DE FILTROS BAYESIANOS EM UM ESCOAMENTO BIFÁSICO ÓLEO-ÁGUA EM RESERVATÓRIO DE PETRÓLEO
 APLICAÇÃO DE FILTROS BAYESIANOS EM UM ESCOAMENTO BIFÁSICO ÓLEO-ÁGUA EM RESERVATÓRIO DE PETRÓLEO R. X. HOFFMANN¹, W. B. da SILVA 2, J. C. S. DUTRA 3, R. A. G. MARQUES 4 1,2,3 Universidade Federal do Espírito
APLICAÇÃO DE FILTROS BAYESIANOS EM UM ESCOAMENTO BIFÁSICO ÓLEO-ÁGUA EM RESERVATÓRIO DE PETRÓLEO R. X. HOFFMANN¹, W. B. da SILVA 2, J. C. S. DUTRA 3, R. A. G. MARQUES 4 1,2,3 Universidade Federal do Espírito
Certificação PMP: Alinhado com o PMBOK Guide 5ª edição (Portuguese Edition)
") Certificação PMP: Alinhado com o PMBOK Guide 5ª edição (Portuguese Edition) Armando Monteiro Click here if your download doesn"t start automatically Certificação PMP: Alinhado com o PMBOK Guide 5ª edição
Certificação PMP: Alinhado com o PMBOK Guide 5ª edição (Portuguese Edition) Armando Monteiro Click here if your download doesn"t start automatically Certificação PMP: Alinhado com o PMBOK Guide 5ª edição
ESTIMADOR DE ESTADOS PARA ROBÔ DIFERENCIAL
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA MARCO ANTONIO DALCIN TOCCHETTO ESTIMADOR DE ESTADOS PARA ROBÔ DIFERENCIAL Porto Alegre 2017
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA MARCO ANTONIO DALCIN TOCCHETTO ESTIMADOR DE ESTADOS PARA ROBÔ DIFERENCIAL Porto Alegre 2017
Figura 1 - Robô GP8 da Seegrid.
 1 Introdução Um robô móvel realmente autônomo é um agente inteligente capaz de se mover por ambientes não estruturados, isto é, que não foram preparados para a operação de robôs, realizando tarefas desejadas,
1 Introdução Um robô móvel realmente autônomo é um agente inteligente capaz de se mover por ambientes não estruturados, isto é, que não foram preparados para a operação de robôs, realizando tarefas desejadas,
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1
 ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
João Paulo de Freitas Araujo. Algoritmos para acelerar a computação de Árvores de corte de Gomory e Hu. Dissertação de Mestrado
 João Paulo de Freitas Araujo Algoritmos para acelerar a computação de Árvores de corte de Gomory e Hu Dissertação de Mestrado Dissertação apresentada ao Programa de Pós- Graduação em Engenharia de Produção
João Paulo de Freitas Araujo Algoritmos para acelerar a computação de Árvores de corte de Gomory e Hu Dissertação de Mestrado Dissertação apresentada ao Programa de Pós- Graduação em Engenharia de Produção
O princípio 80/20: Os segredos para conseguir mais com menos nos negócios e na vida (Portuguese Edition)
") O princípio 80/20: Os segredos para conseguir mais com menos nos negócios e na vida (Portuguese Edition) Richard Koch Click here if your download doesn"t start automatically O princípio 80/20: Os segredos
O princípio 80/20: Os segredos para conseguir mais com menos nos negócios e na vida (Portuguese Edition) Richard Koch Click here if your download doesn"t start automatically O princípio 80/20: Os segredos
ISO/IEC 20000: Gerenciamento de Serviços de Tecnologia da Informação (Portuguese Edition)
") ISO/IEC 20000: Gerenciamento de Serviços de Tecnologia da Informação (Portuguese Edition) Jose Maria Fiorino Soula Click here if your download doesn"t start automatically ISO/IEC 20000: Gerenciamento de
ISO/IEC 20000: Gerenciamento de Serviços de Tecnologia da Informação (Portuguese Edition) Jose Maria Fiorino Soula Click here if your download doesn"t start automatically ISO/IEC 20000: Gerenciamento de
Scrum: Gestão ágil para projetos de sucesso (Portuguese Edition)
") Scrum: Gestão ágil para projetos de sucesso (Portuguese Edition) Click here if your download doesn"t start automatically Scrum: Gestão ágil para projetos de sucesso (Portuguese Edition) Scrum: Gestão ágil
Scrum: Gestão ágil para projetos de sucesso (Portuguese Edition) Click here if your download doesn"t start automatically Scrum: Gestão ágil para projetos de sucesso (Portuguese Edition) Scrum: Gestão ágil
Mathematical Foundation I: Fourier Transform, Bandwidth, and Band-pass Signal Representation PROF. MICHAEL TSAI 2011/10/13
 Mathematical Foundation I: Fourier Transform, Bandwidth, and Band-pass Signal Representation PROF. MICHAEL TSAI 2011/10/13 Fourier Transform (): a non-periodic deterministic signal. Definition: the Fourier
Mathematical Foundation I: Fourier Transform, Bandwidth, and Band-pass Signal Representation PROF. MICHAEL TSAI 2011/10/13 Fourier Transform (): a non-periodic deterministic signal. Definition: the Fourier
Planejamento de comunicação integrada (Portuguese Edition)
") Planejamento de comunicação integrada (Portuguese Edition) Click here if your download doesn"t start automatically Planejamento de comunicação integrada (Portuguese Edition) Planejamento de comunicação
Planejamento de comunicação integrada (Portuguese Edition) Click here if your download doesn"t start automatically Planejamento de comunicação integrada (Portuguese Edition) Planejamento de comunicação
EGAN. FUNDAMENTOS DA TERAPIA RESPIRATÓRIA (EM PORTUGUESE DO BRASIL) BY CRAIG L. SCANLAN
 BY CRAIG L. SCANLAN") RESPIRATÓRIA (EM PORTUGUESE DO BRASIL) BY CRAIG L. SCANLAN DOWNLOAD EBOOK : EGAN. FUNDAMENTOS DA TERAPIA BY CRAIG L. SCANLAN PDF Click link below and free register to download ebook: EGAN. FUNDAMENTOS
RESPIRATÓRIA (EM PORTUGUESE DO BRASIL) BY CRAIG L. SCANLAN DOWNLOAD EBOOK : EGAN. FUNDAMENTOS DA TERAPIA BY CRAIG L. SCANLAN PDF Click link below and free register to download ebook: EGAN. FUNDAMENTOS