Disciplina de. Robôs Móveis Autônomos SSC-0714
|
|
|
- Joaquim Franco
- 5 Há anos
- Visualizações:
Transcrição
1 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias [at] gmail.com Web: Wiki ICMC: 1 Aula 05 Aula 04 Arquiteturas de Controle Agenda: Arquiteturas de Controle de Robôs Autônomos 1. Controle e Autonomia 2. Arquitetura de Controle Reativa Modelo Sensorial-Motor Controle em Tarefas Reativas 3. Arquitetura de Controle Deliberativa Mapas e Planejamento de Trajetórias 4. Exemplos de Aplicações 5. Vantagens e Desvantagens 2 1


2 Aula 04 Arquiteturas de Controle : Percebe => Decide => Age Agentes Autônomos dotados de SENSORES e ATUADORES 3 Controle e Autonomia Aula 04 Arquiteturas de Controle Controle e Autonomia Robôs Móveis: Agentes Autônomos dotados de SENSORES e ATUADORES Como Agir? Como Interpretar as Percepções? Como Tomar Decisões? 4 2








3 Aula 04 Arquiteturas de Controle Controle e Autonomia Arquiteturas de Controle Robótico Arquitetura Reativa Arquitetura Deliberativa Arquitetura Hierárquica Arquitetura Híbrida Controle => Tomada de Decisão para Realizar Ações Arquitetura => Modelo de Tomada de Decisão Autonomia => Independência e Robustez na Tomada de Decisões 5 Aula 04 Arquiteturas de Controle Simuladores: Modelos Sensores / Atuadores e Controle KHEPERA-SIM SIMROB2D SEVA2D SIMROB3D SEVA3D ODE-LegGen 6 Player-Stage Webots Juice MSF Robotics Studio 3
4 Arquitetura de Controle Reativo Controle Reativo Controle: Percepção [ => Decisão ] => Ação Reativo: Percepção => Ação - Reage diretamente aos estímulos externos; - Esquema sensorio-motor; 7 Comportamentos e Tarefas típicas: Reactive Behaviour - Vagar pelo ambiente, evitando colisões e obstáculos; - Acompanhar uma parede ou corredor; - Comportamento direcionado pela luz; - Ir em direção a uma determinada orientação Composição de Comportamentos: Direção x Obstáculo Simulador Khepere-SIM: Controle Reativo Simulador do Khepera / SIM 2.0 Unix / Olivier Mitchell / I RIA Sophia Antipolis 8 Sensores: 8 IR / Atuadores: 2 motores com cinemática diferencial 1997/98 4


 IF S1 < Limite and S2 < Limite and S3 > Limite and S4 >")
 10 Evitar colisões e obstáculos")
5 Simulador do Khepera Robô Khepera 9 > 2 DC brushed servo motors with incremental encoders > 8 infrared proximity and ambient light sensors (SFH900) CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo S2 S1 S0 M1 S7 S3 S4 S5 M2 S6 IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THE Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THE Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THE Action(Turn_Right) 10 Evitar colisões e obstáculos Sensorial-Motor: Sentir => Agir 5
6 11 CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora S0 S1 M1 S7 S2 S3 M2 S6 S4 S5 Sensores: 8 - S0 à S7 Comandos: 3 ações (L=Turn Left, F=Forward, R=Turn Right) S0 S1 S2 S3 S4 S5 S6 S7 L F R Evitar 6 colisões 0 3 e obstáculos Sensorial-Motor: Sentir 1 => 0 Agir 0 1 Controle Reativo IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THE Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THE Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THE Action(Turn_Right) CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THE Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THE Action(Turn_Left)? IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THE Action(Turn_Right) 12 Evitar colisões e obstáculos Sensorial-Motor: Sentir => Agir 6
; Se Distância_Adequada(Dist_Parede) Então Move_Para_Frente(); 13 Seguir o contorno de uma parede Sensorial-Motor: Sentir => Agir CONTROLE: Arquiteturas REATIVAS*")
7 CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo Se Longe_Demais(Dist_Parede) Então Gira_Direção(Lado_da_Parede); Se Próximo_Demais(Dist_Parede) Então Gira_Direção(Lado_Oposto_da_Parede); Se Distância_Adequada(Dist_Parede) Então Move_Para_Frente(); 13 Seguir o contorno de uma parede Sensorial-Motor: Sentir => Agir CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas 14 Força de Atração Força de Repulsão 7




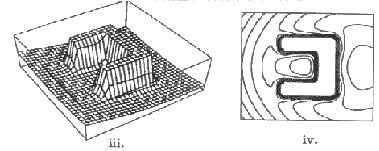
8 CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas 15 Forças Combinadas: Força de Atração + Força de Repulsão PotentialFields Tutorial Michael A. Goodrich CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas Wikipedia: Potential Filed Houston, we have a problem! 16 Forças Combinadas: Força de Atração + Força de Repulsão 8


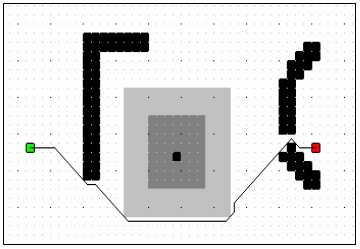
9 CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnicas: - Desvio reativo de Obstáculos - Campos Potenciais Problemas... Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas LOCAIS Houston, we have a problem! >> Mínimos Locais >> Passado, Memória e Contexto Alternância: Oscilação Esq, Dir, Esq, Dir, Esq, Dir, CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Problemas... Houston, we have a problem! >> Mínimos Locais >> Passado, Memória e Contexto 18 9
![CONTROLE: Arquiteturas REATIVAS Reativo: Múltiplos Robôs => Boids / Steering [Craig Reynolds] 19 CONTROLE: Arquiteturas REATIVAS* Reativo: Em Direção ao Deliberativo... http://robocode.sourceforge.](/docs-images/94/119908699/images/10-1.jpg "net/ ROBO CODE 20 /** * Fire when we see a robot */ public void onscannedrobot(scannedrobotevent e) { fire(1); } /** * We were hit!")
10 CONTROLE: Arquiteturas REATIVAS Reativo: Múltiplos Robôs => Boids / Steering [Craig Reynolds] 19 CONTROLE: Arquiteturas REATIVAS* Reativo: Em Direção ao Deliberativo... ROBO CODE 20 /** * Fire when we see a robot */ public void onscannedrobot(scannedrobotevent e) { fire(1); } /** * We were hit! Turn perpendicular to the bullet, * so our seesaw might avoid a future shot. */ public void onhitbybullet(hitbybulletevent e) { turnleft(90 - e.getbearing()); } 10
![Arquitetura de Controle Deliberativo Controle Deliberativo Controle: Percepção => [Conhecimento e Decisão] => Ação Deliberativo: Percepção => Planeja, Delibera => Ação - Possui conhecimento sobre a](/docs-images/94/119908699/images/11-0.jpg "situação do robô e do ambiente; - Usualmente baseado no uso de mapas e planejamento de trajetórias.")

11 Arquitetura de Controle Deliberativo Controle Deliberativo Controle: Percepção => [Conhecimento e Decisão] => Ação Deliberativo: Percepção => Planeja, Delibera => Ação - Possui conhecimento sobre a situação do robô e do ambiente; - Usualmente baseado no uso de mapas e planejamento de trajetórias. Tarefas típicas: Behaviour : Task Planning, Action Sequence 21 - Execução de scripts de ações planejadas previamente; - Executar uma seqüência de ações previamente determinada; - Seguir trajetórias especificadas com uso de mapas; - Execução de Tarefas de Alto ível; Arquitetura de Controle Deliberativo Controle Deliberativo MAPAS DO AMBIE TE: Métrico / Topológico - Mapa Métrico do tipo GRADE (Grid, Mapa de Ocupação) - Mapa Métrico do tipo GEOMÉTRICO (Geometria do Ambiente) 22 Farlei Heinen,
 23 Arquitetura de Controle: Deliberativo SIMROB2D Farlei Heinen, 2000 Planejando a Trajetória do Robo com o uso do Mapa 24 1.")
12 Arquitetura de Controle: Deliberativo SIMROB2D Referência: Farlei Heinen (Orientador: Fernando Osório ) Robótica Autônoma: A integração entre planificação e comportamento reativo Sensores: 5 IR / Atuadores: 2 motores (diferencial) 23 Arquitetura de Controle: Deliberativo SIMROB2D Farlei Heinen, 2000 Planejando a Trajetória do Robo com o uso do Mapa Determinar a área onde o robô pode navegar: Espaço de Configuração 2. Gerar o conjunto de rotas possíveis: Grafo de Visibilidade 3. Obter a melhor trajetória dentro das rotas possíveis: Algoritmo de Dijsktra 12

13 Arquitetura de Controle: Deliberativo SIMROB2D Espaço de Configuração MAPA DO AMBIE TE - Geometrico Grafo de Visibilidade 25 Arquitetura de Controle: Deliberativo SIMROB2D Caminho Ótimo no Grafo: Djikstra Grafo de Visibilidade 26 13



14 Arquitetura de Controle: Deliberativo PLA EJAME TO DE TRAJETÓRIAS Baseado em Mapas Múltiplos Algoritmos avegação baseada em Mapa de Ocupação: Planejamento A* avegação baseada em Mapa Geométrico: Grafo+Dijkstra 27 avegação baseada em Mapa Geométrico: Diagramas de Voronoi Farlei Heinen, 2002 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos 28 [Matthews 2003] 14





15 Controle Robótico Inteligente: Deliberativo A* Planejamento de Trajetórias [Tutorial SBGames 2007] 29 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos [Lester 2004, 2007] 30 15

![SBGames07] Busca Heurística de Caminhos](/docs-images/94/119908699/images/16-1.jpg "Custo de um Caminho F(x) = G(x) + H(x).:.")


16 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:. G = Percorrido, H = Estimado 31 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:. G = Percorrido, H = Estimado MAPA: Custo do Terreno a ser Atravessado 32 16
17 Arquitetura de Controle: Deliberativo CONTROLE: Arquiteturas Deliberativo Deliberativo: Planejamento Técnicas: - Grafo de Visibiliade - Voranoi - A*... Problemas... Seguir em direção a um alvo Planejamento de Trajetória com Mapa * Deliberativo puro baseado em informações externas GLOBAIS Houston, we have a problem! >> Mapas com informações imprecisas >> Obstáculos Dinâmicos (não mapeados) >> Erros de localização do robô 33 Localização => Tem que ser precisa! Mapa do Ambiente => Tem que ser exato! Arquitetura de Controle CONTROLE: Arquiteturas Reativas Ambas possuem problemas e limitações! CONTROLE: Arquiteturas Deliberativas Solução? Buscar aproveitar o que de melhor tem cada uma das duas abordagens... SISTEMAS HÍBRIDOS! 34 17
18 Arquitetura de Controle Referências citadas nesta aula... Craig Reinolds Boids, OpenSteer, Flocks (múltiplos agentes autônomos) Robocode Batalha de Robôs Simulados Simulador do Khepera Simulador com Planejamento de Trajetória (SimRob 2D) 35 Referências do Algoritmo A* (A Star) A* Demo1: A* Demo2: CE/ARTICLES/ARTICLE2003.ASP A* Multiplo: I FORMAÇÕES SOBRE A DISCIPLI A USP - Universidade de São Paulo - São Carlos, SP ICMC - Instituto de Ciências Matemáticas e de Computação SSC - Departamento de Sistemas de Computação Prof. Fernando Santos OSÓRIO PAE Maurício Acconcia Dias Web institucional: Página pessoal: fosorio[at at]{ icmc.usp usp.br, gmail.com } # macccdias[at at]gmail.com 36 Disciplina de Web Disciplinas: Wiki ICMC: php/ssc-714 > Programa, Material de Aulas, Critérios de Avaliação, > Material de Apoio, Trabalhos Práticos 18
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
23/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
R bó b ti t ca M M vel I nt n e t ligent n e t : D S i S mul u ação à s A p A l p icações n o n
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2010 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2010 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2011 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Leandro Fernandes Email: lnd [at]
Tópicos Especiais I - Jogos IA para Jogos
 Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes
Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
GT-JeDi - Curso de Desenv. de Jogos IA para Jogos
 GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Arquitetura de Computadores: Introdução
 USP SSC5 - Informática T / 2-2 USP - ICMC - SSC SSC 5 - Informática - 2o. Semestre 2 : Introdução Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP SSC5 - Informática T / 2-2 USP - ICMC - SSC SSC 5 - Informática - 2o. Semestre 2 : Introdução Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Disciplina de Organização de Computadores I
 USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários PAE:
USP - ICMC - SSC SSC o. Semestre Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]
![USP - ICMC - SSC SSC o. Semestre Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]](/thumbs/79/80335974.jpg "USP - ICMC - SSC SSC o. Semestre Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]") USP - ICMC - SSC SSC 0300-2o. Semestre 2013 Disciplina de [ Eng. Elétrica / Automação ] Prof. Dr. Fernando Santos Osório / PAE: Rafael Klaser (LRM / ICMC) LRM - Laboratório de Robótica Móvel do ICMC /
USP - ICMC - SSC SSC 0300-2o. Semestre 2013 Disciplina de [ Eng. Elétrica / Automação ] Prof. Dr. Fernando Santos Osório / PAE: Rafael Klaser (LRM / ICMC) LRM - Laboratório de Robótica Móvel do ICMC /
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Disciplina de Organização de Computadores I
 USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Organização de Computadores I
 USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Organização de Computadores I
 USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111
 USP - ICMC - SSC SSC 0111 (Lab ELD I) - 2o. Semestre 2011 Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111 1 Agosto 2011 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail.
USP - ICMC - SSC SSC 0111 (Lab ELD I) - 2o. Semestre 2011 Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111 1 Agosto 2011 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail.
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2011 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2011 Prof. Fernando Santos
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2011 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2011 Prof. Fernando Santos
Prof. Dr. Alexandre da Silva Simões UNESP
 UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
Disciplina de Organização de Computadores I
 USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Disciplina de SSC Elementos de Lógica Digital II (Prática)
") USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
Disciplina de Arquitetura de Computadores
 USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Computação para Engenharia Ambiental
 USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2011 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Gustavo Pessin - pessin [at] gmail.com
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2011 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Gustavo Pessin - pessin [at] gmail.com
Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2015 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0501-1o. Semestre 2015 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Computação para Engenharia Ambiental
 USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental 1 Outubro 2013 Prof. Dr. Fernando Santos Osório / Prof. Artur Lovato Cunha LRM - Laboratório
USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental 1 Outubro 2013 Prof. Dr. Fernando Santos Osório / Prof. Artur Lovato Cunha LRM - Laboratório
Temas Principais: Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,...
 3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
Tipos de Robôs. Tipos de Robôs. Tipos de Robôs. Percepção Decisão Tipo de Mobilidade
 30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas
 Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Disciplina de SSC Elementos de Lógica Digital II (Prática)
") USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC SSC 0113 (Lab ELD II) - 2o. Semestre 2012 Disciplina de SSC0113 - Elementos de Lógica Digital II (Prática) 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Disciplina de Arquitetura de Computadores
 USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2009 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2009 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111
 USP - ICMC - SSC SSC 0111 (Lab ELD I) - 2o. Semestre 2011 Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111 1 Agosto 2011 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail.
USP - ICMC - SSC SSC 0111 (Lab ELD I) - 2o. Semestre 2011 Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111 1 Agosto 2011 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail.
USP - ICMC - SSC SSC o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com Página Pessoal:
Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
USP - ICMC - SSC SSC o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 02 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Inteligência Artificial. Prof. Tiago A. E. Ferreira Aula 4 Tipos de Agentes Inteligentes Racionais e Ambientes
 Inteligência Artificial Prof. Tiago A. E. Ferreira Aula 4 Tipos de Agentes Inteligentes Racionais e Ambientes 1 Um programa de IA pode ser visto como um Agente Racional Plano da aula Ambientes e arquiteturas
Inteligência Artificial Prof. Tiago A. E. Ferreira Aula 4 Tipos de Agentes Inteligentes Racionais e Ambientes 1 Um programa de IA pode ser visto como um Agente Racional Plano da aula Ambientes e arquiteturas
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
Disciplina de. Organização de Computadores Digitais
 USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Computação para Engenharia Ambiental
 USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental Prof. Dr. Fernando Santos Osório LRM - Laboratório de Robótica Móvel do ICMC / CROB-SC Email:
Disciplina de Organização de Computadores I
 USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0610 - Eng. Comp. - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de. Organização de Computadores Digitais
 USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0501-1o. Semestre 2010 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] icmc. usp. br, gmail. com Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Arquitetura de Computadores
 USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Fundamentos de Inteligência Artificial [5COP099]
![Fundamentos de Inteligência Artificial [5COP099]](/thumbs/81/84038238.jpg "Fundamentos de Inteligência Artificial [5COP099]") Fundamentos de Inteligência Artificial [5COP099] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre Assunto Aula 2 Agentes Inteligentes 2 de 22 Sumário Introdução Propriedades dos Agentes
Fundamentos de Inteligência Artificial [5COP099] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre Assunto Aula 2 Agentes Inteligentes 2 de 22 Sumário Introdução Propriedades dos Agentes
parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web:
 Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Disciplina de. Organização de Computadores Digitais
 USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de Arquitetura de Computadores
 USP - ICC - SSC SSC 0510 - Informática - 2o. Semestre 2009 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICC - SSC SSC 0510 - Informática - 2o. Semestre 2009 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,