Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação
|
|
|
- Otávio Aranha Carlos
- 8 Há anos
- Visualizações:
Transcrição
1 Dia Fernando da Computação UNOCHAPECÓ, Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian MSc.Túlio Cláudio Jung (Eng. (Eng. da Comput.) Eletr.) e Veículos Autônomos: Novos Desafios para a Computação UNISINOS Mestrado em Computação Aplicada - PIPCA Web: Grupo de inteligência Artificial - PIPCA - Unisinos Web: Grupo de Pesquisas em Veículos Autônomos: Web: GIA / PIPCA GPVA - Unisinos e Veículos Autônomos GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Inteligência & Robôs Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Mapas do Ambiente: Construção de Mapas Planejamento de Trajetórias SMPA - Sense Model Plan Act Problemas: Desvio de Obstáculos Posicionamento Soluções: Controle Robusto Híbrido Simulação - SimRob3D 1

2 e Veículos Autônomos GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Inteligência & Robôs Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Mapas do Ambiente: Construção de Mapas Planejamento de Trajetórias SMPA - Sense Model Plan Act Problemas: Desvio de Obstáculos Posicionamento Soluções: Controle Robusto Híbrido Simulação - SimRob3D 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico C0 C1 M1 C2 C3 C4 C5 M2 Controle Reativo Sensorial-Motor: Sentir => Agir C7 C6 IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) 2
 IF S1 <")

3 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Sensorial-Motor: Sentir => Agir 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Sensorial-Motor: Sentir => Agir 3

4 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Mapa, Grafo de Visibilidade, Caminho Otimizado (Dijkstra) 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico Controle Hierárquico: - Camadas - Prioridades - Troca de Informações Figures From: Brooks, R. A. MIT A.I. Memo 864 Sept Brooks - Arquitetura Subsumption 4


5 1. Controle Reativo 2. Controle Deliberativo 3. Controle Hierárquico / Híbrido Farlei Heinen Mapa do Ambiente Navegação baseada em Mapa Geométrico 5

6 Contrução do Mapa do Ambiente: SMPA - SENSE / MODEL / PLAN / ACT Mapa do Ambiente Flávio Alves Contrução do Mapa do Ambiente: SMPA - SENSE / MODEL / PLAN / ACT Mapa do Ambiente Sebastian Thrun / CMU 6

7 Planejamento de Trajetórias SMPA - SENSE / MODEL / PLAN / ACT PLAN: A*, Dijkstra,... PROBLEMAS: Execução de Tarefas * Desvio de Obstáculos - Obstáculos conhecidos - Obstáculos desconhecidos (parados) - Obstáculos desconhecidos (em movimento) * Posicionamento - Qual a posição atual do robô? - Como garantir que após me deslocar ainda sei onde o robô está? - Erro e Imprecisão: Translação / Rotação 7


8 PROBLEMAS: Execução de Tarefas * Desvio de Obstáculos - Obstáculos conhecidos - Obstáculos desconhecidos (parados) - Obstáculos desconhecidos (em movimento) PROBLEMAS: Execução de Tarefas * Posicionamento - Qual a posição atual do robô? - Como garantir que após me deslocar ainda sei onde o robô está? - Erro e Imprecisão: Translação / Rotação Farlei Heinen 8


9 Temas Principais: GIA-PIPCA Tipos de Robôs Sensores e Atuadores Inteligência & Robôs Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Mapas do Ambiente: Construção de Mapas Planejamento de Trajetórias SMPA - Sense Model Plan Act Problemas: Desvio de Obstáculos Posicionamento Soluções: Controle Robusto Híbrido Simulação - SimRob3D 9

10 Simulação com o SimRob3D Simulação em Ambiente Estático com Localização Monte Carlo 10

11 Simulação em Ambiente Estático com Localização Monte Carlo Simulação em Ambiente Alterado em Relação a Representação Interna 11

12 Simulação em Ambiente com Obstáculos Móveis Relocalização com Monte Carlo 12

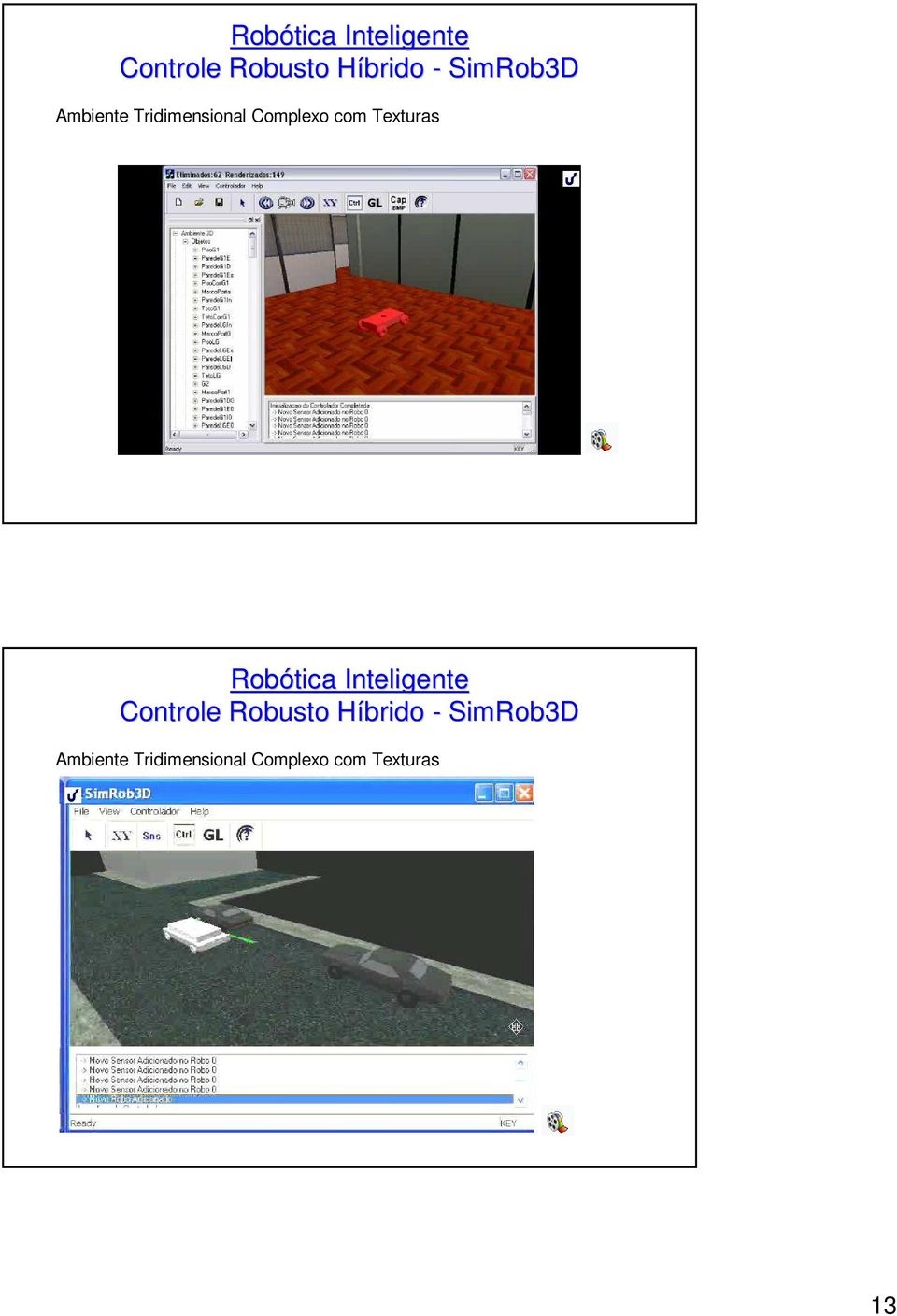
13 Ambiente Tridimensional Complexo com Texturas Ambiente Tridimensional Complexo com Texturas 13


14 Pesquisas em Desenvolvimento... GIA / GPVA Visão Computacional / Veículos Inteligentes Joystick Veículos Inteligentes Data Reconhecimentode GloveGestos TelefoneCelular Mini-Baja Buggy: Interfaces Profs. Kelber e Osório 14

15 Rally de VeículosMóveisAutônomos Inteligentes Veículos Móveis: Protótipos - Prof. Kelber Lane Follow Detecção das Bordas da Pista Prof. Cláudio Jung Visão Computacional 15

16 Visão Computacional Navegação Visual Prof. Fernando Osório Sequência de Imagens previamente Armazenadas Correlação entre Imagens da BI e ICR (Rota de Navegação Visual) Geração de Comando (set-point): Prof.Dr.Christian MScFarleiHeinen- Fernando Kelber- Osório- Esquerda, Direita ou Avançar Exemplos: Cláudio Estacionar, Navegação Jung ACC autônoma + Follow+ CollisionAvoidance, e Veículos Autônomos GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos Robótica, Visão e Automação Inteligente - Níveis de Controle Comando / Acionamento Drive by Wire Joystick, Celular, Data Glove comandando Controle / Apoio ao Motorista AGV, ACC, Lane Follow, Avoidande Condução / Dirigir Autonomamente UNISINOS Mestrado em Computação Aplicada - PIPCA Web: Grupo de inteligência Artificial - PIPCA - Unisinos Web: Grupo de Pesquisas em Veículos Autônomos: Web: GIA / PIPCA GPVA - Unisinos 16

GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
Robótica Autônoma Sensores e Atuadores
 * Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
* Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
Temas Principais: Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,...
 3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica eletrica.unisinos..unisinos.br/~autonom Dr. Christian R. Kelber
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica eletrica.unisinos..unisinos.br/~autonom Dr. Christian R. Kelber
Robótica Inteligente e Veículos Autônomos: Robótica Inteligente e Veículos Autônomos: Técnicas e Aplicações
 Unisinos PIPCA-GIA: GPVA : GRAPHIT / 2006 Prof.Dr.Christian PPG em Computação Aplicada -Robótica Inteligente Colaboradores: Alunos AdiléaWagner, Milton MScFarleiHeinen-farlei@unisinos.br Heinen, Cláudio
Unisinos PIPCA-GIA: GPVA : GRAPHIT / 2006 Prof.Dr.Christian PPG em Computação Aplicada -Robótica Inteligente Colaboradores: Alunos AdiléaWagner, Milton MScFarleiHeinen-farlei@unisinos.br Heinen, Cláudio
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas
 Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 02 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
USO DA ARQUITETURA AURA - AUTONOMOUS ROBOT ARCHITECTURE EM UM ROBÔ EXPLORADOR DE LABIRINTO CONTROLADO POR RASPBERRY PI.
 USO DA ARQUITETURA AURA - AUTONOMOUS ROBOT ARCHITECTURE EM UM ROBÔ EXPLORADOR DE LABIRINTO CONTROLADO POR RASPBERRY PI. Resumo João Paulo Fernandes da Silva¹, Willame Balbino Bonfim 1. joaopauloibge@hotmail.com
USO DA ARQUITETURA AURA - AUTONOMOUS ROBOT ARCHITECTURE EM UM ROBÔ EXPLORADOR DE LABIRINTO CONTROLADO POR RASPBERRY PI. Resumo João Paulo Fernandes da Silva¹, Willame Balbino Bonfim 1. joaopauloibge@hotmail.com
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Sistemas Inteligentes. Aula: Agentes Inteligentes Flávia Barros & Patricia Tedesco
 Sistemas Inteligentes Aula: Agentes Inteligentes Flávia Barros & Patricia Tedesco 1 Ao final desta aula a gente deve... Entender o que é um Agente Racional (inteligente)? Distinguir entre os vários tipos
Sistemas Inteligentes Aula: Agentes Inteligentes Flávia Barros & Patricia Tedesco 1 Ao final desta aula a gente deve... Entender o que é um Agente Racional (inteligente)? Distinguir entre os vários tipos
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Agentes Inteligentes. Inteligência Artificial. Exemplos. Agentes Inteligentes. Prof. Ms. Luiz Alberto Contato: lasf.bel@gmail.com
 Agentes Inteligentes Inteligência Artificial Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. Agente Prof. Ms. Luiz Alberto Contato:
Agentes Inteligentes Inteligência Artificial Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. Agente Prof. Ms. Luiz Alberto Contato:
Autonomous Vehicles:
 Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Ementa. Inteligência Artificial. Agentes. Agentes Inteligentes. Exemplos 8/18/2010. Mapeando percepções em ações. Aula 2 Profª Bianca Zadrozny
 Ementa Inteligência Artificial Aula 2 Profª Bianca Zadrozny Agentes inteligentes (Cap. 1 e 2) Resolução de problemas por meio de busca (Cap. 3, 4 e 6) Representação de conhecimento e raciocínio através
Ementa Inteligência Artificial Aula 2 Profª Bianca Zadrozny Agentes inteligentes (Cap. 1 e 2) Resolução de problemas por meio de busca (Cap. 3, 4 e 6) Representação de conhecimento e raciocínio através
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
TECNOLOGIAS DE RASTREAMENTO DE VEÍCULOS. PTR5923 Prof. Flávio Vaz flaviovaz@usp.br
 TECNOLOGIAS DE RASTREAMENTO DE VEÍCULOS PTR5923 Prof. Flávio Vaz flaviovaz@usp.br 09/11/15 PTR5923 - Tecnologias de Rastreamento de Veículos 2 Componentes do Sistema Sistemas Posicionamento Comunicação
TECNOLOGIAS DE RASTREAMENTO DE VEÍCULOS PTR5923 Prof. Flávio Vaz flaviovaz@usp.br 09/11/15 PTR5923 - Tecnologias de Rastreamento de Veículos 2 Componentes do Sistema Sistemas Posicionamento Comunicação
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
TCC04040 Inteligência Artificial. Inteligência Artificial
 Inteligência Artificial Aula 2 Profª Bianca Zadrozny TCC04040 Inteligência Artificial Página web: http://www.ic.uff.br/~bianca/ia Material: Livro texto: Inteligência Artificial, Russell & Norvig, Editora
Inteligência Artificial Aula 2 Profª Bianca Zadrozny TCC04040 Inteligência Artificial Página web: http://www.ic.uff.br/~bianca/ia Material: Livro texto: Inteligência Artificial, Russell & Norvig, Editora
Agentes - Definição. Inteligência Artificial. Agentes Inteligentes
 Inteligência Artificial s Inteligentes s - Definição : entidade capaz de perceber e agir em um ambiente, comunicar-se com outros agentes, motivada por um conjunto de inclinações, que pode dispor de representação
Inteligência Artificial s Inteligentes s - Definição : entidade capaz de perceber e agir em um ambiente, comunicar-se com outros agentes, motivada por um conjunto de inclinações, que pode dispor de representação
UNIVERSIDADE FEDERAL DE PERNAMBUCO - PRÓ-REITORIA PARA ASSUNTOS ACADÊMICOS CURRÍCULO DO CURSO DE GRADUAÇÃO EM ENGENHARIA DA COMPUTAÇÃO PERFIL
 PERFIL 3001 - Válido para os alunos ingressos a partir de 2002.1 Disciplinas Obrigatórias Ciclo Geral Prát IF668 Introdução à Computação 1 2 2 45 MA530 Cálculo para Computação 5 0 5 75 MA531 Álgebra Vetorial
PERFIL 3001 - Válido para os alunos ingressos a partir de 2002.1 Disciplinas Obrigatórias Ciclo Geral Prát IF668 Introdução à Computação 1 2 2 45 MA530 Cálculo para Computação 5 0 5 75 MA531 Álgebra Vetorial
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
INF 1771 Inteligência Artificial
 Edirlei Soares de Lima INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
Edirlei Soares de Lima INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA Dr. Christian R. Kelber Dr. Cláudio R. Jung MSc. Farlei Heinen http://www.eletrica eletrica.unisinos..unisinos.br/~autonom
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA Dr. Christian R. Kelber Dr. Cláudio R. Jung MSc. Farlei Heinen http://www.eletrica eletrica.unisinos..unisinos.br/~autonom
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Computação Embarcada: Projeto e Implementação de Veículos Autônomos Inteligentes
 Computação Embarcada: Projeto e Implementação de Veículos Autônomos Inteligentes Cláudio Rosito Jung, Fernando Santos Osório, Christian Roberto Kelber e Farlei José Heinen Abstract This chapter presents
Computação Embarcada: Projeto e Implementação de Veículos Autônomos Inteligentes Cláudio Rosito Jung, Fernando Santos Osório, Christian Roberto Kelber e Farlei José Heinen Abstract This chapter presents
Action Vision Visão. Versão 1.0. Histórico de Revisão Data Versão Descrição Autor 06/08/2014 1.0 Visão geral do projeto Matheus Camilo
 Action Vision Visão Versão 1.0 Histórico de Revisão Data Versão Descrição Autor 06/08/2014 1.0 Visão geral do projeto Matheus Camilo Página 1 de 12 Sumário 1. INTRODUÇÃO...3 1.1 Finalidade...3 1.2 Escopo...3
Action Vision Visão Versão 1.0 Histórico de Revisão Data Versão Descrição Autor 06/08/2014 1.0 Visão geral do projeto Matheus Camilo Página 1 de 12 Sumário 1. INTRODUÇÃO...3 1.1 Finalidade...3 1.2 Escopo...3
Realidade Virtual: Aumentando ainda mais o realismo
 Universidade do Vale do Rio dos Sinos Realidade Virtual: Aumentando ainda mais o realismo Mestrado em Computação Aplicada Dr. Fernando S. Osório fosorio@unisinos.br Milton Roberto Heinen mheinen@turing.unisinos.br
Universidade do Vale do Rio dos Sinos Realidade Virtual: Aumentando ainda mais o realismo Mestrado em Computação Aplicada Dr. Fernando S. Osório fosorio@unisinos.br Milton Roberto Heinen mheinen@turing.unisinos.br
Tecnologia de Comando Numérico 164399
 164399 Aula 2 Introdução à Automação da Manufatura Mecatrônica; Automação; Níveis de Automação; Tipos de Automação; Justificativas para automatizar; Justificativas para não automatizar; Prof. Edson Paulo
164399 Aula 2 Introdução à Automação da Manufatura Mecatrônica; Automação; Níveis de Automação; Tipos de Automação; Justificativas para automatizar; Justificativas para não automatizar; Prof. Edson Paulo
Olimpíada Brasileira de Robótica 2008
 2008 Modalidade: Teórica Nível 2 (4º, 5º e 6º anos) Tempo de Duração: 2 horas ome do luno:... Matr:...... Escola:... Cidade:... Estado:...... Uma das 5 Olimpíadas Científicas com apoio financeiro do: Patrocinio:
2008 Modalidade: Teórica Nível 2 (4º, 5º e 6º anos) Tempo de Duração: 2 horas ome do luno:... Matr:...... Escola:... Cidade:... Estado:...... Uma das 5 Olimpíadas Científicas com apoio financeiro do: Patrocinio:
Secullum Clube.Net ESPECIFICAÇÕES TÉCNICAS. Secullum Clube.Net. Ficha Técnica. Serviço de Comunicação. Controle de Veículos.
 ESPECIFICAÇÕES TÉCNICAS Serviço de Comunicação Secullum Clube.Net Controle de Veículos Gerencial Integração DVR/NVR Financeiro Boletos Automação Consumo Sistema Operacional: compatível com Windows XP ou
ESPECIFICAÇÕES TÉCNICAS Serviço de Comunicação Secullum Clube.Net Controle de Veículos Gerencial Integração DVR/NVR Financeiro Boletos Automação Consumo Sistema Operacional: compatível com Windows XP ou
Atuadores: Atuadores: Atuadores:
 Ministério da Educação Instituto Federal de Educação, Ciência e Tecnologia Sudeste de Minas Gerais - Campus Rio Pomba Bacharelado em Ciência da Computação Inteligência Artificial (Lista 1) Prof. Alex F.
Ministério da Educação Instituto Federal de Educação, Ciência e Tecnologia Sudeste de Minas Gerais - Campus Rio Pomba Bacharelado em Ciência da Computação Inteligência Artificial (Lista 1) Prof. Alex F.
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
TÍTULO: COMPARAÇÃO ENTRE OS MÉTODOS DE BUSCA EM ESPAÇOS DE ESTADOS E O ALGORITMO DE DIJKSTRA
 TÍTULO: OMPRÇÃO ENTRE OS MÉTODOS DE US EM ESPÇOS DE ESTDOS E O LGORITMO DE DIJKSTR TEGORI: ONLUÍDO ÁRE: IÊNIS EXTS E D TERR SUÁRE: OMPUTÇÃO E INFORMÁTI INSTITUIÇÃO: UNIVERSIDDE DE SORO UTOR(ES): PEDRO
TÍTULO: OMPRÇÃO ENTRE OS MÉTODOS DE US EM ESPÇOS DE ESTDOS E O LGORITMO DE DIJKSTR TEGORI: ONLUÍDO ÁRE: IÊNIS EXTS E D TERR SUÁRE: OMPUTÇÃO E INFORMÁTI INSTITUIÇÃO: UNIVERSIDDE DE SORO UTOR(ES): PEDRO
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Dúvidas e sugestões sobre esse manual podem ser enviadas para o e-mail: sac@cerruns.com.br
 Este manual descreve a utilização do Software de Monitoramento Web CERRUNS. O endereço eletrônico (URL) para acessá-lo está disponível no Manual do Equipamento, que foi adquirido juntamente com o rastreador
Este manual descreve a utilização do Software de Monitoramento Web CERRUNS. O endereço eletrônico (URL) para acessá-lo está disponível no Manual do Equipamento, que foi adquirido juntamente com o rastreador
Solução de Segurança patrimonial com a tecnologia RFID(*)
") Solução de Segurança patrimonial com a tecnologia RFID(*) (*) - RFID Identificação por Rádio Freqüência Usa antenas que lêem e gravam informações em chips, para monitoramento de ativos pessoas ou objetos
Solução de Segurança patrimonial com a tecnologia RFID(*) (*) - RFID Identificação por Rádio Freqüência Usa antenas que lêem e gravam informações em chips, para monitoramento de ativos pessoas ou objetos
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Tipos de controladores e funcionamento
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ141- INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS custo Malhas Outros Processos de controle: de Separação Tipos de controladores e funcionamento
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ141- INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS custo Malhas Outros Processos de controle: de Separação Tipos de controladores e funcionamento
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Integração avançada entre sistemas de movimento e visão
 Integração avançada entre sistemas de movimento e visão Marcelo Costa Engenheiro de Vendas Telles Soares Engenheiro de Campo Agenda Benefícios da integração Tipos de integração e exemplos MOVIMENTO VISÃO
Integração avançada entre sistemas de movimento e visão Marcelo Costa Engenheiro de Vendas Telles Soares Engenheiro de Campo Agenda Benefícios da integração Tipos de integração e exemplos MOVIMENTO VISÃO
Desenho Auxiliado por Computador Aula 2. Professora: Priscila Medeiro
 Desenho Auxiliado por Computador Aula 2 Professora: Priscila Medeiro O que é CAD? Desenho auxiliado por computador Sistema baseado em desenho Facilita o Projeto e Desenhos Técnicos Utilizados pela geologia,
Desenho Auxiliado por Computador Aula 2 Professora: Priscila Medeiro O que é CAD? Desenho auxiliado por computador Sistema baseado em desenho Facilita o Projeto e Desenhos Técnicos Utilizados pela geologia,
A LUZ DA INOVAÇÃO NAS CIDADES INTELIGENTES ATRAVÉS DA INTERNET DAS COISAS. Vinícius Garcia de Oliveira
 A LUZ DA INOVAÇÃO NAS CIDADES INTELIGENTES ATRAVÉS DA INTERNET DAS COISAS Vinícius Garcia de Oliveira 1 Uma ICT focada em inovação Comunicação e Multimídia Financeiro Utilities Industria e Corporativo
A LUZ DA INOVAÇÃO NAS CIDADES INTELIGENTES ATRAVÉS DA INTERNET DAS COISAS Vinícius Garcia de Oliveira 1 Uma ICT focada em inovação Comunicação e Multimídia Financeiro Utilities Industria e Corporativo
BEC- Bafômetro Embutido em Carros
 BEC- Bafômetro Embutido em Carros Síntia Rodrigues Moreira Fernanda Rodrigues da Silva Márcia Jorge do Carmo Renata Cristina Guimarães Sofia Pereira Campos Agosto de 2014 1 1 Introdução O consumo de álcool
BEC- Bafômetro Embutido em Carros Síntia Rodrigues Moreira Fernanda Rodrigues da Silva Márcia Jorge do Carmo Renata Cristina Guimarães Sofia Pereira Campos Agosto de 2014 1 1 Introdução O consumo de álcool
Sistema de localização e bloqueio veicular por célula de comunicação Objetivo Principal
 de comunicação Objetivo Principal Prover uma solução de baixo custo para Identificação, localização, bloqueio e recuperação de veículos roubados ou procurados, através de micro circuitos embarcados de
de comunicação Objetivo Principal Prover uma solução de baixo custo para Identificação, localização, bloqueio e recuperação de veículos roubados ou procurados, através de micro circuitos embarcados de
Tecnologias para Automação Veicular Soluções em Mecatrônica e Sistemas de Apoio ao Motorista
 Tecnologias para Automação Veicular Soluções em Mecatrônica e Sistemas de Apoio ao Motorista Christian R. Kelber 1 Fernando Santos Osório 2 Claudio Rosito Jung 3 Rubem Sprenger Dreger 4 Roger Gules 5 Claudio
Tecnologias para Automação Veicular Soluções em Mecatrônica e Sistemas de Apoio ao Motorista Christian R. Kelber 1 Fernando Santos Osório 2 Claudio Rosito Jung 3 Rubem Sprenger Dreger 4 Roger Gules 5 Claudio
Inteligência Artificial. Agentes Inteligentes
 Inteligência Artificial Agentes Inteligentes Agentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. em busca de um objetivo Exemplos
Inteligência Artificial Agentes Inteligentes Agentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. em busca de um objetivo Exemplos
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
2. Principais diferenças da versão megadmx Windows e versão megadmx MAC OS X
 Instalação software megadmx MAC OS X Autor: Luís Augusto Spranger (www.megadmx.com) data: 24.02.2008 2006 2009 megadmx Índice 1. Requisitos de hardware para uso do megadmx MAC OS X...1 2. Principais diferenças
Instalação software megadmx MAC OS X Autor: Luís Augusto Spranger (www.megadmx.com) data: 24.02.2008 2006 2009 megadmx Índice 1. Requisitos de hardware para uso do megadmx MAC OS X...1 2. Principais diferenças
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Sistema de Controle de Posicionamento de Estações Móveis via Internet e GPS
 UNIVERSIDDE DO ESTDO DO MZONS ESCOL SUPERIOR DE TECNOLOGI COORDENÇÃO DE ENGENHRI D COMPUTÇÃO Sistema de Controle de Posicionamento de Estações Móveis via Internet e GPS Elaborado por: Moacir de Oliveira
UNIVERSIDDE DO ESTDO DO MZONS ESCOL SUPERIOR DE TECNOLOGI COORDENÇÃO DE ENGENHRI D COMPUTÇÃO Sistema de Controle de Posicionamento de Estações Móveis via Internet e GPS Elaborado por: Moacir de Oliveira
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Visão e Processamento de Imagens. Imagem digital. Processamento Digital de Imagens. Obtenção de uma imagem digital
 Visão e Processamento de Imagens Hitoshi aula 1 - Introdução 1o Semestre 2004 Ao final dessa aula você deverá saber: Imagem digital Descrição de imagens digitais Processamento digital de imagens definição
Visão e Processamento de Imagens Hitoshi aula 1 - Introdução 1o Semestre 2004 Ao final dessa aula você deverá saber: Imagem digital Descrição de imagens digitais Processamento digital de imagens definição
Monitoramento. Intuitivo, Configurável, Robusto. WEB Outros sistemas: GIS, ERPs... PORTAL SWS. Combustível. Apontamentos
 Monitoramento PORTAL SWS Intuitivo, Configurável, Robusto WEB Outros sistemas: GIS, ERPs... RPM Combustível Paradas Transmissão Apontamentos MONITORE TODAS AS OPERAÇÕES Controle do Operador Identificação
Monitoramento PORTAL SWS Intuitivo, Configurável, Robusto WEB Outros sistemas: GIS, ERPs... RPM Combustível Paradas Transmissão Apontamentos MONITORE TODAS AS OPERAÇÕES Controle do Operador Identificação
CTEX - LABORATORIO DE CONTROLE REMOTO DE SISTEMAS MILITARES
 CTEX - LABORATORIO DE CONTROLE REMOTO DE SISTEMAS MILITARES 1 a Adaptação e preparação dos sistemas de freio, direção, alimentação e direção da viatura, para permitir o controle RF e instalação dos atuadores
CTEX - LABORATORIO DE CONTROLE REMOTO DE SISTEMAS MILITARES 1 a Adaptação e preparação dos sistemas de freio, direção, alimentação e direção da viatura, para permitir o controle RF e instalação dos atuadores
Apresentação. Maio de 2014
 Apresentação Maio de 2014 Desafios para a disponibilização da geoinformação para o Monitoramento Ambiental Moderno Case: Ibama Objeto Auxiliar a promoção de um Monitoramento Ambiental Moderno apoiado por
Apresentação Maio de 2014 Desafios para a disponibilização da geoinformação para o Monitoramento Ambiental Moderno Case: Ibama Objeto Auxiliar a promoção de um Monitoramento Ambiental Moderno apoiado por
Prefeitura Municipal de Águas Lindas de Goiás GO ANEXO IV CENTRO DE CONTROLE OPERACIONAL E SISTEMA DE BILHETAGEM ELETRÔNICA
 ANEXO IV CENTRO DE CONTROLE OPERACIONAL E SISTEMA DE BILHETAGEM ELETRÔNICA ANEXO IV. CENTRO DE CONTROLE OPERACIONAL E SISTEMA DE BILHETAGEM ELETRONICA CENTRO DE CONTROLE OPERACIONAL 1. INTRODUÇÃO - CCO
ANEXO IV CENTRO DE CONTROLE OPERACIONAL E SISTEMA DE BILHETAGEM ELETRÔNICA ANEXO IV. CENTRO DE CONTROLE OPERACIONAL E SISTEMA DE BILHETAGEM ELETRONICA CENTRO DE CONTROLE OPERACIONAL 1. INTRODUÇÃO - CCO
Realidade Virtual VR++
 Realidade Virtual: Aumentando ainda mais o Realismo Programa de Pós-Graduação em Computação Aplicada - PIPCA GRAPHIT / GPVA / GIA / RBV Prof. Dr. Fernando S. Osório - Computação Mestrando Milton Roberto
Realidade Virtual: Aumentando ainda mais o Realismo Programa de Pós-Graduação em Computação Aplicada - PIPCA GRAPHIT / GPVA / GIA / RBV Prof. Dr. Fernando S. Osório - Computação Mestrando Milton Roberto
Gravação e Transmissão
 O D-Guard Center é um poderoso sistema de controle e monitoramento, integrado aos mais diversos equipamentos de segurança eletrônica. Ilimitados dispositivos podem ser controlados e monitorados simultaneamente:
O D-Guard Center é um poderoso sistema de controle e monitoramento, integrado aos mais diversos equipamentos de segurança eletrônica. Ilimitados dispositivos podem ser controlados e monitorados simultaneamente:
Objetivo. 0 Conceitos. 0 Funcionalidades. 0 Desafios. 0 Experiências de Implantação
 Objetivo 0 Conceitos 0 Funcionalidades 0 Desafios 0 Experiências de Implantação Smart Grid Conceitos 0 NÃO é só Medição Eletrônica e Telecom!! 0 Envolve conhecimentos sobre: 0 Tecnologia, Padrões, Normas
Objetivo 0 Conceitos 0 Funcionalidades 0 Desafios 0 Experiências de Implantação Smart Grid Conceitos 0 NÃO é só Medição Eletrônica e Telecom!! 0 Envolve conhecimentos sobre: 0 Tecnologia, Padrões, Normas
RECONHECIMENTO DE PADRÕES. OCR - Reconhecimento óptico de caracteres
 RECONHECIMENTO DE PADRÕES OCR - Reconhecimento óptico de caracteres INTRODUÇÃO Reconhecimento de padrões é uma área da ciência cujo objetivo é a classificação de objetos dentro de um número de categorias
RECONHECIMENTO DE PADRÕES OCR - Reconhecimento óptico de caracteres INTRODUÇÃO Reconhecimento de padrões é uma área da ciência cujo objetivo é a classificação de objetos dentro de um número de categorias
Computação Gráfica. Introdução. Profª Alessandra Martins Coelho
 Computação Gráfica Introdução Profª Alessandra Martins Coelho março/2013 Introdução Computação gráfica (CG) é a utilização de computadores para gerar imagens (GUHA, 2013). Nos dias atuais, para não se
Computação Gráfica Introdução Profª Alessandra Martins Coelho março/2013 Introdução Computação gráfica (CG) é a utilização de computadores para gerar imagens (GUHA, 2013). Nos dias atuais, para não se
Controle Supervisório e Aquisição de Dados (SCADA) Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED
 Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED") Controle Supervisório e Aquisição de Dados (SCADA) Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED Yuri Kaszubowski Lopes Roberto Silvio Ubertino Rosso Jr. UDESC 24 de Abril de
Controle Supervisório e Aquisição de Dados (SCADA) Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED Yuri Kaszubowski Lopes Roberto Silvio Ubertino Rosso Jr. UDESC 24 de Abril de
MATEMÁTICA E TECNOLOGIA: DESENVOLVENDO JOGOS ELETRÔNICOS UTILIZANDO O SCRATCH
 MATEMÁTICA E TECNOLOGIA: DESENVOLVENDO JOGOS ELETRÔNICOS UTILIZANDO O SCRATCH Lucas Gabriel Seibert, Rodrigo Dalla Vecchia lucasseibert@hotmail.com, rodrigovecchia@gmail.com ULBRA, Brasil Palavras-chave:
MATEMÁTICA E TECNOLOGIA: DESENVOLVENDO JOGOS ELETRÔNICOS UTILIZANDO O SCRATCH Lucas Gabriel Seibert, Rodrigo Dalla Vecchia lucasseibert@hotmail.com, rodrigovecchia@gmail.com ULBRA, Brasil Palavras-chave:
Reconhecimento de imagem com uso de veículo autônomo. 1/5 www.ni.com
 Reconhecimento de imagem com uso de veículo autônomo "Este artigo aborda o desenvolvimento de um veículo autônomo, que utiliza o reconhecimento de imagens para se locomover até um determinado objeto, identificado
Reconhecimento de imagem com uso de veículo autônomo "Este artigo aborda o desenvolvimento de um veículo autônomo, que utiliza o reconhecimento de imagens para se locomover até um determinado objeto, identificado
PROGRAMAÇÃO PARA DISPOSITIVOS MÓVEIS. Prof. Angelo Augusto Frozza, M.Sc. http://about.me/tilfrozza
 PROGRAMAÇÃO PARA DISPOSITIVOS MÓVEIS Prof. Angelo Augusto Frozza, M.Sc. http://about.me/tilfrozza ROTEIRO Introdução Infraestrutura móvel Características dos dispositivos móveis Desenvolvendo aplicações
PROGRAMAÇÃO PARA DISPOSITIVOS MÓVEIS Prof. Angelo Augusto Frozza, M.Sc. http://about.me/tilfrozza ROTEIRO Introdução Infraestrutura móvel Características dos dispositivos móveis Desenvolvendo aplicações
Sistema de de Gerenciamento, Automação e Economia de Água PROJETO 3T (SCADA + GIS + MODELAGEM) "UM MUNDO NOVO EM SUAS MÃOS"
 UM MUNDO NOVO EM SUAS MÃOS") Sistema de de Gerenciamento, Automação e Economia de de Água ABINEE TEC - Minas Gerais 2006 PROJETO 3T (SCADA + GIS + MODELAGEM) "UM MUNDO NOVO EM SUAS MÃOS" COPASA DIRETORIA METROPOLITANA AGOSTO / 2006
Sistema de de Gerenciamento, Automação e Economia de de Água ABINEE TEC - Minas Gerais 2006 PROJETO 3T (SCADA + GIS + MODELAGEM) "UM MUNDO NOVO EM SUAS MÃOS" COPASA DIRETORIA METROPOLITANA AGOSTO / 2006
Solução de problemas por meio de busca (com Python) Luis Martí DEE/PUC-Rio http://lmarti.com
 Luis Martí DEE/PUC-Rio http://lmarti.com") Solução de problemas por meio de busca (com Python) Luis Martí DEE/PUC-Rio http://lmarti.com Python e AI (Re)-introdução ao Python. Problemas de busca e principais abordagens. Exemplos em Python Por que
Solução de problemas por meio de busca (com Python) Luis Martí DEE/PUC-Rio http://lmarti.com Python e AI (Re)-introdução ao Python. Problemas de busca e principais abordagens. Exemplos em Python Por que
 Русский Tipo Data Cor Semana Classifi cado conforme o tipo de arquivo (por exemplo, imagem, vídeo ou voz) Classifi cado conforme a seqüência de datas registradas. Classifi cado conforme a cor
Русский Tipo Data Cor Semana Classifi cado conforme o tipo de arquivo (por exemplo, imagem, vídeo ou voz) Classifi cado conforme a seqüência de datas registradas. Classifi cado conforme a cor
FERRAMENTA ALTERNATIVA PARA O CONTROLE TÉRMICO DE ALIMENTOS, COM ÊNFASE NA FABRICAÇÃO DE IOGURTE
 FERRAMENTA ALTERNATIVA PARA O CONTROLE TÉRMICO DE ALIMENTOS, COM ÊNFASE NA FABRICAÇÃO DE IOGURTE Serviço Nacional de Aprendizagem Industrial - SENAI / Automação / Toledo -PR MONDADORI, J. A. P.; ANTUNES,
FERRAMENTA ALTERNATIVA PARA O CONTROLE TÉRMICO DE ALIMENTOS, COM ÊNFASE NA FABRICAÇÃO DE IOGURTE Serviço Nacional de Aprendizagem Industrial - SENAI / Automação / Toledo -PR MONDADORI, J. A. P.; ANTUNES,
ANEXO II INFORMAÇÕES BÁSICAS DOS CURSOS. Modalidade Subseqüente
 Serviço Público Federal Ministério da Educação Instituto Federal de Educação, Ciência e Tecnologia do Pará Campus Belém Processo Seletivo Técnico Subseqüente 2012/2 ANEXO II INFORMAÇÕES BÁSICAS DOS CURSOS
Serviço Público Federal Ministério da Educação Instituto Federal de Educação, Ciência e Tecnologia do Pará Campus Belém Processo Seletivo Técnico Subseqüente 2012/2 ANEXO II INFORMAÇÕES BÁSICAS DOS CURSOS
SGAA AGV Gerar Senha de atendimento
 Histórico da Revisão Data Final Versão Descrição Autor Nome Objetivo Prioridade Procedimento para gerar senha de atendimento do SGAA através da AGV Mostrar quais os passos um usuário pertencente ao canal
Histórico da Revisão Data Final Versão Descrição Autor Nome Objetivo Prioridade Procedimento para gerar senha de atendimento do SGAA através da AGV Mostrar quais os passos um usuário pertencente ao canal
Documento Auxiliar do Conhecimento de Transporte Eletrônico
 Documento Auxiliar do Conhecimento de Transporte Eletrônico 8338 Documento Auxiliar do Conhecimento de Transporte Eletrônico 8339 Documento Auxiliar do Conhecimento de Transporte Eletrônico 8340 Documento
Documento Auxiliar do Conhecimento de Transporte Eletrônico 8338 Documento Auxiliar do Conhecimento de Transporte Eletrônico 8339 Documento Auxiliar do Conhecimento de Transporte Eletrônico 8340 Documento
PREFEITURA MUNICIPAL DE VOLTA REDONDA
 Anexo II.9 Especificações do Sistema de Monitoramento da Frota PREFEITURA MUNICIPAL DE VOLTA REDONDA ÍNDICE 1 OBJETIVOS... 2 2 ESPECIFICAÇÃO BÁSICA... 2 2.1 Aquisição de Dados Monitorados do Veículo...
Anexo II.9 Especificações do Sistema de Monitoramento da Frota PREFEITURA MUNICIPAL DE VOLTA REDONDA ÍNDICE 1 OBJETIVOS... 2 2 ESPECIFICAÇÃO BÁSICA... 2 2.1 Aquisição de Dados Monitorados do Veículo...
Ementas Disciplinas Eletivas
 Ementas Disciplinas Eletivas INFORMÁTICA Administração de Redes CH: 60 h Créditos: 2.1.0 Pré-requisito(s): Redes de Computadores II Conceitos e políticas de administração de redes. Gerência de redes e
Ementas Disciplinas Eletivas INFORMÁTICA Administração de Redes CH: 60 h Créditos: 2.1.0 Pré-requisito(s): Redes de Computadores II Conceitos e políticas de administração de redes. Gerência de redes e
Concreto e Agregados CATÁLOGO DE PRODUTOS. Pág. 1. Seção C
 I-3001 PRENSA HIDRÁULICA MANUAL 100T COM 1 MANÔMETRO NBR NM-ISO 7500-1; NBR 12767, 7680, 5739; DNER-ME091; MN 101 PALAVRA-CHAVE: Prensa, Corpos de Prova, compressão, tração, flexão, diametral Prensa manual
I-3001 PRENSA HIDRÁULICA MANUAL 100T COM 1 MANÔMETRO NBR NM-ISO 7500-1; NBR 12767, 7680, 5739; DNER-ME091; MN 101 PALAVRA-CHAVE: Prensa, Corpos de Prova, compressão, tração, flexão, diametral Prensa manual
Projeto de controle e Automação de Antena
 Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Darwin Portal. Documentação Darwin Portal
 Darwin Portal Documentação Darwin Portal Versão 2.0.0 Outubro/2015 1. Introdução... 2 2. Darwin Portal, Requisitos de Acesso e Visão Geral... 2 3. My Darwin... 6 3.1. Operação... 6 3.2. Veículo... 7 3.3.
Darwin Portal Documentação Darwin Portal Versão 2.0.0 Outubro/2015 1. Introdução... 2 2. Darwin Portal, Requisitos de Acesso e Visão Geral... 2 3. My Darwin... 6 3.1. Operação... 6 3.2. Veículo... 7 3.3.
SISTEMAS DE AUTOMAÇÃO
 SISTEMAS DE AUTOMAÇÃO OPÇÕES DE PIVÔ PIVÔS ZIMMATIC BY LINDSAY ADEQUADOS PARA QUALQUER ÁREA Você pode acoplar componentes e acessórios para construir seu próprio sistema. Com Zimmatic, você escolhe seu
SISTEMAS DE AUTOMAÇÃO OPÇÕES DE PIVÔ PIVÔS ZIMMATIC BY LINDSAY ADEQUADOS PARA QUALQUER ÁREA Você pode acoplar componentes e acessórios para construir seu próprio sistema. Com Zimmatic, você escolhe seu
Automação Industrial Parte 2
 Automação Industrial Parte 2 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Perspectiva Histórica Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
Automação Industrial Parte 2 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Perspectiva Histórica Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
SafeLogic compact A solução compacta para a segurança
 A solução a para a segurança 2 Safety on Board Segurança a bordo: integrada, certificada e completa Safety on Board, ou seja, segurança a bordo, significa soluções de segurança inteligentes desenvolvidas
A solução a para a segurança 2 Safety on Board Segurança a bordo: integrada, certificada e completa Safety on Board, ou seja, segurança a bordo, significa soluções de segurança inteligentes desenvolvidas
Inteligência Artificial
 Inteligência Artificial Licenciatura em Computação Prof. Adriano Avelar Site: www.adrianoavelar.com Email: eam.avelar@gmail.com Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por
Inteligência Artificial Licenciatura em Computação Prof. Adriano Avelar Site: www.adrianoavelar.com Email: eam.avelar@gmail.com Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por
Gabriel Carvalho Business Developer
 Gabriel Carvalho Business Developer ESTRUTURA DA CORPORAÇÃO Geosystems Metrology Captura, referência, analise, processo e armazenamento de valiosa informação geográfica, permitindo, em muitos casos, os
Gabriel Carvalho Business Developer ESTRUTURA DA CORPORAÇÃO Geosystems Metrology Captura, referência, analise, processo e armazenamento de valiosa informação geográfica, permitindo, em muitos casos, os
EDITAL CONCORRÊNCIA 02/2015 ANEXO VI - ESPECIFICAÇÃO DO SISTEMA DE MONITORAMENTO DA FROTA.
 EDITAL CONCORRÊNCIA 02/2015 ANEXO VI - ESPECIFICAÇÃO DO SISTEMA DE MONITORAMENTO DA FROTA. 1. Sistema de Monitoramento da Frota O Sistema de Monitoramento da Frota será implantado pela concessionária para
EDITAL CONCORRÊNCIA 02/2015 ANEXO VI - ESPECIFICAÇÃO DO SISTEMA DE MONITORAMENTO DA FROTA. 1. Sistema de Monitoramento da Frota O Sistema de Monitoramento da Frota será implantado pela concessionária para
Introdução ao Desenvolvimento de Jogos BCT - UERN
 Introdução ao Desenvolvimento de Jogos BCT - UERN PROJETO DE EXTENSÃO UNIVERSIDADE ESTADUAL DO RIO GRANDE DO NORTE O QUE É O SCRATCH? Scratch é uma nova linguagem de programação criada no Media Lab do
Introdução ao Desenvolvimento de Jogos BCT - UERN PROJETO DE EXTENSÃO UNIVERSIDADE ESTADUAL DO RIO GRANDE DO NORTE O QUE É O SCRATCH? Scratch é uma nova linguagem de programação criada no Media Lab do
Arduino e Processing. Professor: Paulo Marcos Trentin Escola CDI Videira
 Arduino e Processing Professor: Paulo Marcos Trentin Escola CDI Videira O que é Processing? É uma linguagem criada em 2001 por Casey Reas e Benjamin Fry, na época estudantes do MIT. Seu objetivo é server
Arduino e Processing Professor: Paulo Marcos Trentin Escola CDI Videira O que é Processing? É uma linguagem criada em 2001 por Casey Reas e Benjamin Fry, na época estudantes do MIT. Seu objetivo é server