Robôs Móveis Autônomos
|
|
|
- Sabrina Carreiro Galvão
- 6 Há anos
- Visualizações:
Transcrição
1 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC: Instituto Nacional de C&T em Sistemas Embarcados Críticos CROB-SC: Centro de Robótica da USP de São Carlos fosorio [at] { icmc. usp. br, gmail. com } Web: Wiki: Aula 02 Aula 02 RMA: Robôs Móveis Autônomos Agenda: 1. Arquiteturas de Controle 2. Mapas: Construção e Uso (+localização) 3. Planejamento (+localização) 4. Navegação (+localização) 2 Março
2 Introdução RMA Robôs Móveis Autônomos Conceitos Básicos... Introdução aos Sistemas Robóticos SENSORES ATUADORES CONTROLE INTELIGENTE Ciclo: - Percepção [ Planejamento / Decisão ] - Ação Tarefas: 3 Mario Localização (Pose) - Mapas (criar, usar) - Planejar Rotas - Desviar de Obstáculos Percepção Decisão - Ação Laço: Percepção Decisão - Ação Autonomia Percepção: Humana / Robô Decisão: Humana / Robô Ação: Humana / Robô Percepção Decisão Ação Sensores Processamento Motores Autômato - - R Tele-Operado H H R Semi-Autônomo H/R H/R R Autônomo R R R H: Humano R: Robótico 4 Março
3 Arquiteturas de Controle Arquitetura de Controle: Reativo Percebe => Age Deliberativo Planeja/Decide => Age Agentes Autônomos dotados de SENSORES e ATUADORES Reativo: Sensorial Motor Planejamento Deliberativo 5 Abril 2010 Arquiteturas de Controle ARQUITETURAS HÍBRIDAS 6 [J. Okamoto Jr & V. Grassi Jr., 2012] Abril
![Arquitetura de Controle Reativo Puro Controle Reativo Puro Controle: Percepção [ => Decisão => ] => Ação Reativo: Percepção => Ação - Reage diretamente aos estímulos externos; - Esquema](/docs-images/77/75049926/images/4-0.jpg "sensorio-motor; 7 Comportamentos e Tarefas típicas: Reactive Behaviour - Vagar pelo ambiente, evitando colisões e obstáculos; - Acompanhar uma parede ou corredor; - Comportamento")

4 Arquitetura de Controle Reativo Puro Controle Reativo Puro Controle: Percepção [ => Decisão => ] => Ação Reativo: Percepção => Ação - Reage diretamente aos estímulos externos; - Esquema sensorio-motor; 7 Comportamentos e Tarefas típicas: Reactive Behaviour - Vagar pelo ambiente, evitando colisões e obstáculos; - Acompanhar uma parede ou corredor; - Comportamento direcionado pela luz; - Ir em direção a uma determinada orientação Composição de Comportamentos: Direção x Obstáculo Sensores e Atuadores: Simulação Robótica Autônoma Inteligente Simuladores [Clássicos] Simulador do Khepera / SIM 2.0 Unix / Olivier Mitchell / INRIA Sophia Antipolis 8 Março 2011 Sensores: 8 IR / Atuadores: 2 motores com cinemática diferencial F.Osório 1997/98 (Ph.D.) 4
 Arquitetura de")

 10 Evitar colisões e obstáculos")
5 Sensores e Atuadores: Simulação Simulador do Khepera Robô Khepera 9 > 2 DC brushed servo motors with incremental encoders Março 2011 > 8 infrared proximity and ambient light sensors (SFH900) Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo S2 S1 S0 M1 S7 S3 S4 S5 M2 S6 IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) 10 Evitar colisões e obstáculos Sensorial-Motor: Sentir => Agir 5
6 Arquitetura de Controle: Reativo 11 CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora S0 S1 M1 S7 S2 S3 M2 S6 S4 S5 Sensores: 8 - S0 à S7 Comandos: 3 ações (L=Turn Left, F=Forward, R=Turn Right) S0 S1 S2 S3 S4 S5 S6 S7 L F R Evitar 6 colisões 0 3 e obstáculos Sensorial-Motor: Sentir 1 => 0 Agir 0 1 Controle Reativo IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left) IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo IF S1 < Limite and S2 < Limite and S3 < Limite and S4 < Limite THEN Action (Go_Forward) IF S1 < Limite and S2 < Limite and S3 > Limite and S4 > Limite THEN Action(Turn_Left)? IF S2 > Limite and S3 > Limite and S2 > S3 and S1 > S4 THEN Action(Turn_Right) 12 Evitar colisões e obstáculos Sensorial-Motor: Sentir => Agir 6
7 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Integração Sensorial-Motora Controle Reativo Se Longe_Demais(Dist_Parede) Então Gira_Direção(Lado_da_Parede); Se Próximo_Demais(Dist_Parede) Então Gira_Direção(Lado_Oposto_da_Parede); Se Distância_Adequada(Dist_Parede) Então Move_Para_Frente(); 13 Seguir o contorno de uma parede Sensorial-Motor: Sentir => Agir Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnicas: - Desvio reativo de Obstáculos - Campos Potenciais Problemas... Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas LOCAIS Houston, we have a problem! >> Mínimos Locais >> Passado, Memória e Contexto Alternância: Oscilação Esq, Dir, Esq, Dir, Esq, Dir,



8 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Problemas... Houston, we have a problem! >> Mínimos Locais >> Passado, Memória e Contexto 15 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas 16 Força de Atração Força de Repulsão 8



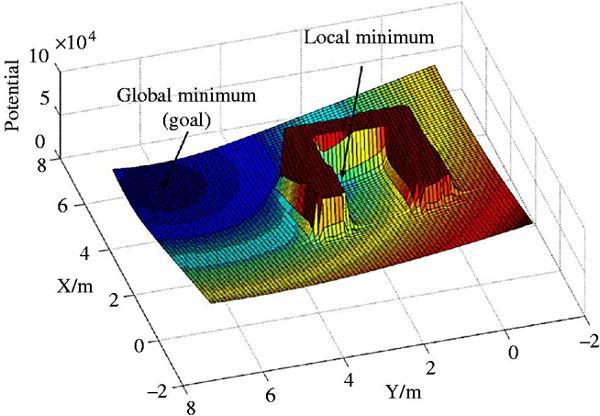
9 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas 17 Forças Combinadas: Força de Atração + Força de Repulsão Potential Fields Tutorial Michael A. Goodrich Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Integração Sensorial-Motora Técnica: Campos Potenciais Evitar colisões e obstáculos Seguir em direção a um alvo Sensorial-Motor: Sentir => Agir * Reativo não puro baseado em informações externas PROBLEMA DO MÍNIMO LOCAL 18 Forças Combinadas: Força de Atração + Força de Repulsão 9




10 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS Reativo: Múltiplos Robôs => Boids / Steering [Craig Reynolds] Boids: Steering Behaviours: 19 Arquitetura de Controle: Reativo CONTROLE: Arquiteturas REATIVAS* Reativo: Em Direção ao Deliberativo... ROBO CODE 20 /** * Fire when we see a robot */ public void onscannedrobot(scannedrobotevent e) { fire(1); } /** * We were hit! Turn perpendicular to the bullet, * so our seesaw might avoid a future shot. */ public void onhitbybullet(hitbybulletevent e) { turnleft(90 - e.getbearing()); } 10
![Arquitetura de Controle Deliberativo Controle Deliberativo Puro Controle: [Percepção =>] Conhecimento e Decisão => Ação](/docs-images/77/75049926/images/11-1.jpg "Deliberativo: Planeja, Delibera => Ação - Possui conhecimento sobre a situação do robô e do ambiente; - Usualmente baseado no uso de")


11 Arquitetura de Controle Deliberativo Controle Deliberativo Puro Controle: [Percepção =>] Conhecimento e Decisão => Ação Deliberativo: Planeja, Delibera => Ação - Possui conhecimento sobre a situação do robô e do ambiente; - Usualmente baseado no uso de mapas e planejamento de trajetórias. Tarefas típicas: Behaviour : Task Planning, Action Sequence 21 - Execução de scripts de ações planejadas previamente; - Executar uma seqüência de ações previamente determinada; - Seguir trajetórias especificadas com uso de mapas; - Execução de Tarefas de Alto Nível; Arquitetura de Controle Deliberativo Controle Deliberativo MAPAS DO AMBIENTE: Métrico / Topológico - Mapa Métrico do tipo GRADE (Grid, Mapa de Ocupação) - Mapa Métrico do tipo GEOMÉTRICO (Geometria do Ambiente) 22 Farlei Heinen,

, GiraEsq (90º), Frente (500cm), GiraDir(45º) 23 Março 2009 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento")
12 Planejamento de Trajetórias Pré-Planejamento: Controle Deliberativo Planejamento na I.A. Clássica: Se for possível identificar um estado inicial e garantir uma seqüência de ações que me levam de um estado a outro até um estado final conhecido... Planejamento Malha Aberta Script de Ações. Exemplo: Frente (100cm), GiraEsq (90º), Frente (500cm), GiraDir(45º) 23 Março 2009 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico hierárquico Março 2009 Planos: Ir de 1 até Ir de até 1.3:
13 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 25 Março 2009 Algoritmo de Dijkstra: Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 26 Março 2009 Algoritmo de Dijkstra: 13
14 Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 27 Março 2009 Algoritmo de Dijkstra: Planejamento de Trajetórias Planejamento: Usando o Mapa Topológico Planejamento em um mapa topológico do tipo grafo 28 Março 2009 Algoritmo de Dijkstra: 14


15 Sensores e Atuadores: Simulação SIMROB2D Referência: Farlei Heinen (Orientador: Fernando Osório ) Robótica Autônoma: A integração entre planificação e comportamento reativo Sensores: 5 IR / Atuadores: 2 motores (diferencial) 29 Março 2011 Fernando Osório, Farlei Heinen (TCC) Arquitetura de Controle: Deliberativo SIMROB2D Espaço de Configuração MAPA DO AMBIENTE - Geometrico Grafo de Visibilidade 30 15




16 Arquitetura de Controle: Deliberativo SIMROB2D Caminho Ótimo no Grafo: Djikstra Grafo de Visibilidade 31 Arquitetura de Controle: Deliberativo PLANEJAMENTO DE TRAJETÓRIAS Baseado em Mapas Múltiplos Algoritmos Navegação baseada em Mapa de Ocupação: Planejamento A* Navegação baseada em Mapa Geométrico: Grafo+Dijkstra 32 Navegação baseada em Mapa Geométrico: Diagramas de Voronoi Farlei Heinen,
![Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca](/docs-images/77/75049926/images/17-0.jpg "Heurística de Caminhos [Matthews 2003] 33 Tutorial SBGames 2007: http://osorio.")

17 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos [Matthews 2003] 33 Tutorial SBGames 2007: Controle Robótico Inteligente: Deliberativo A* Planejamento de Trajetórias [Tutorial SBGames 2007] 34 17

![[Tutorial SBGames07] Busca](/docs-images/77/75049926/images/18-1.jpg "Heurística de Caminhos [Lester")
![2004, 2007] 35 Heurística](/docs-images/77/75049926/images/18-3.jpg "de Caminhos Custo de um")

18 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos [Lester 2004, 2007] 35 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:. G = Percorrido, H = Estimado 36 18

19 Planejamento de Trajetórias Planejamento: Usando o Mapa de Ocupação Planejamento em um Grid: Uso do D* The D* algorithm (Dynamic A*) plans optimal traverses in real-time by incrementally repairing paths to the robot s state as new information is discovered. It is widely used in vehicle navigation applications. In several navigation and exploration applications, the environment is not known prior to pathfinding. A* needs to know the MAP to (pre)plan. D* is an incremental algorithm. 37 Março 2009 Reference: The Focussed D* Algorithm for Real-Time Replanning Anthony Stentz - Robotics Institute - Carnegie Mellon University, 1995 Planejamento de Trajetórias Planejamento: Usando o Mapa de Ocupação Planejamento em um Grid: Uso do D* [Stentz 95] 38 Março
![Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca](/docs-images/77/75049926/images/20-1.jpg "Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:.")


 >> Erros de")
20 Controle Robótico Inteligente: Deliberativo A* Search: [Tutorial SBGames07] Busca Heurística de Caminhos Custo de um Caminho F(x) = G(x) + H(x).:. G = Percorrido, H = Estimado MAPA: Custo do Terreno a ser Atravessado 39 Arquitetura de Controle: Deliberativo CONTROLE: Arquiteturas Deliberativo Deliberativo: Planejamento Técnicas: - Grafo de Visibiliade - Voranoi - A*... Problemas... Seguir em direção a um alvo Planejamento de Trajetória com Mapa * Deliberativo puro baseado em informações externas GLOBAIS Houston, we have a problem! >> Mapas com informações imprecisas >> Obstáculos Dinâmicos (não mapeados) >> Erros de localização do robô 40 Localização => Tem que ser precisa! Mapa do Ambiente => Tem que ser exato! 20
21 Arquiteturas de Controle Arquitetura de Controle: Reativo Percebe => Age Deliberativo Planeja/Decide => Age Agentes Autônomos dotados de SENSORES e ATUADORES Reativo: Sensorial Motor Planejamento Deliberativo 41 Abril 2010 Arquiteturas de Controle Reativo: Sensorial Motor Planejamento Deliberativo 42 Março
22 Arquitetura de Controle CONTROLE: Arquiteturas Reativas Ambas possuem problemas e limitações! CONTROLE: Arquiteturas Deliberativas Solução? Buscar aproveitar o que de melhor tem cada uma das duas abordagens... SISTEMAS HÍBRIDOS! 43 Arquiteturas de Controle ARQUITETURAS HÍBRIDAS 44 [J. Okamoto Jr & V. Grassi Jr., 2013] Abril
23 Arquiteturas de Controle Controle e Autonomia Arquiteturas de Controle Robótico Arquitetura Reativa Arquitetura Deliberativa Arquitetura Hierárquica Arquitetura Híbrida Controle => Tomada de Decisão para Realizar Ações Arquitetura => Modelo de Tomada de Decisão Autonomia => Independência e Robustez na Tomada de Decisões 45 Abril 2010 Arquiteturas de Controle Híbridas Controle Hierárquico Vertical Hierarquia de Comportamentos: - Evitar/Desviar de obstáculos - Seguir em uma determinada direção - Seguir uma determinada rota 46 Abril
24 Arquiteturas de Controle Híbridas Controle Hierárquico Vertical Brooks - Arquitetura Subsumption 47 Abril 2010 Figures From: Brooks, R. A. MIT A.I. Memo 864 Sept Arquiteturas de Controle Híbridas Controle Hierárquico Arquiteturas Hierárquicas Verticais Brooks-Subsumption Arquitetura Hierárquicas Horizontais SMPA Sense Model - Plan - Act 48 Abril
 50 Abril 2010")
25 Arquiteturas de Controle Híbridas Controle Hierárquico/Híbrido: SMPA Controle Híbrido Farlei Heinen 49 Abril 2010 PLAN: Dijkstra ACT & ReACT Arquiteturas de Controle Híbridas Arquiteturas Híbridas Controle Híbrido: Arquitetura com Estados Internos (Autômato) 50 Abril
 e de aceleração (gas pedal) + frente/ré Cinemática do tipo Ackerman (veículo) / Sem simulação da dinâmica do veículo Fernando Osório, Farlei")
 e Odômetro Atuadores: Cinemática Ackerman (velocidade e giro da")
26 Sensores e Atuadores: Simulação SEVA2D Simulador de Estacionamento de Veículos Autônomos 2D 51 Março 2011 Sensores: 6 sensores de proximidade Atuadores: atuador de direção (steering) e de aceleração (gas pedal) + frente/ré Cinemática do tipo Ackerman (veículo) / Sem simulação da dinâmica do veículo Fernando Osório, Farlei Heinen (Seminco, SBRN 2002) Sensores e Atuadores: Simulação SEVA3D Simulador de Estacionamento de Veículos Autônomos 3D Searching Parking Space Positioning Outside Entering Positioning Inside Aligning 52 Março 2011 Sensores: Sonar (configurável pelo usuário) e Odômetro Atuadores: Cinemática Ackerman (velocidade e giro da direção) 26
27 Autômato SEVA: Estacionamento Autônomo SEVA-A: Autômato de Controle Procurando_Vaga Posicionando Entrando_Vaga Posicionando_Vaga Parado Alinhando Otimizando_Vaga 53 Autômato de estados finitos (FSA): Estado E, Sensores S => Estado E, Comando C Autômato SEVA: Estacionamento Autônomo Se Estado_Atual(Procurando_Vaga) e Próximo_ao_Obstáculo(V[4]) e Próximo_ao_Obstáculo(V[5]) Então Speed = Avanço_Rápido e RotVel = Direção_Reta; Se Estado_Atual(Procurando_Vaga) e Longe do_obstáculo(v[2])e Longe do_obstáculo(v[3]) e Longe do_obstáculo(v[4]) e Longe do_obstáculo(v[5]) Então Troca_Estado(Posicionando) e Inicializa(Odômetro); Se Estado_Atual(Posicionando) Então Speed = Avanço_Rápido e Rotvel = Direção_Reta; Se Estado_Atual(Posicionando) e Longe_do_Obstáculo(V[4]) e Deslocamento_Suficiente(Odômetro) Então Estado_atual(Entrando_Vaga) e Inicializa(Odômetro); Se Estado_Atual(Entrando_Vaga) Então Speed = Ré_Rápida e RotVel = Giro_Esquerda_Max; 54 Problemas: Usuário deve explicitar as regras, estas regras são pouco robustas, estão sujeitas a erros, são pouco flexíveis e de difícil adaptação a novas situações; 27



28 Sensores e Atuadores: Simulação SEVA3D Simulador de Estacionamento de Veículos Autônomos 3D Searching Parking Space Positioning Outside Entering Positioning Inside Aligning 55 Março 2011 Sensores: Sonar (configurável pelo usuário) e Odômetro Atuadores: Cinemática Ackerman (velocidade e giro da direção) Sensores e Atuadores: Simulação SEVA3D Simulador de Estacionamento de Veículos Autônomos 3D Fernando Osório Farlei Heinen Milton Heinen (IJCNN 2006) 56 Março 2011 Sensores: Sonar (configurável pelo usuário) e Odômetro Atuadores: Cinemática Ackerman Usual: 6 sonares com posições específicas, odômetro, controle de velocidade e de giro da direção 28
 DECISÃO 57 Abril 2010 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs")
 Fernando Osório, Farlei Heinen (M.")
29 Arquiteturas de Controle Híbridas Arquiteturas Híbridas Controle Híbrido: Arquitetura com Estados Internos (Autômato + Rede Neural) DECISÃO 57 Abril 2010 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs 3D / Controle Híbrido COHBRA 58 Março 2011 Sensores: Bumper, IR ou Sonar (configurável pelo usuário) Atuadores: Cinemática diferencial ou Ackerman (configurável pelo usuário) Fernando Osório, Farlei Heinen (M.Sc.) 29
 Atuadores: Cinemática diferencial ou Ackerman (configurável pelo usuário) Março 2011 Sensores e")
 Atuadores: Cinemática Diferencial ou Ackerman (configurável pelo usuário) Fernando Osório, Farlei")
30 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs 3D / Controle Híbrido COHBRA 59 Sensores: Bumper, IR ou Sonar (configurável pelo usuário) Atuadores: Cinemática diferencial ou Ackerman (configurável pelo usuário) Março 2011 Sensores e Atuadores: Simulação SIMROB3D Simulador de Robôs 3D / Controle Híbrido COHBRA 60 Março 2011 Sensores: Bumper, IR ou Sonar (configurável pelo usuário) Atuadores: Cinemática Diferencial ou Ackerman (configurável pelo usuário) Fernando Osório, Farlei Heinen (M.Sc.) 30

31 Arquiteturas de Controle Híbridas Controle Híbrido Robusto COHBRA / SimRob3D 61 Abril 2010 Arquiteturas de Controle Híbridas Controle Híbrido Robusto COHBRA / SimRob3D Mapa: Geométrico, Grade, Topológico Auto-Localização Planejamento de Trajetória Desvio de Obstáculos 62 Abril 2010 Controle Híbrido Reativo / Deliberativo 31
32 Arquiteturas de Controle Híbridas Arquiteturas para Robôs Móveis Autônomos Referências do Material Apresentado: HEINEN, Farlei ; OSÓRIO, Fernando S.. HyCAR - A Robust Hybrid Control Architecture for Autonomous Robots. In: HIS Hybrid Intelligent Systems, 2002, Santiago do Chile. Soft Computing Systems - Design, Management and Applications. Frontiers in Artificial Intelligence and Applications Series: IOS Press, v. 87. p ( usp / guest ) [Arquitetura COHBRA] Farlei Heinen. Sistema de Controle Híbrido para Robôs Móveis Autônomos [SimRob3D / COHBRA] Dissertação (Mestrado em Computação Aplicada) - Universidade do Vale do Rio dos Sinos Orientador: Fernando Santos Osório. HEINEN, Milton Roberto ; OSÓRIO, Fernando S. ; HEINEN, Farlei ; KELBER, Christian. SEVA3D: Autonomous Vehicles Parking Simulator in a three-dimensional environment. INFOCOMP (UFLA), v. 6, p , HEINEN, Milton Roberto ; OSÓRIO, Fernando S. ; HEINEN, Farlei ; KELBER, Christian. SEVA3D: Using Artificial Neural Networks to Autonomous Vehicle Parking Control.. In: IJCNN IEEE International Joint Conference on Neural Networks, 2006, Vancouver. Proceeding of the WCCI (World Congress on Computational Intelligence) - IJCNN. Vancouver, Canadá : IEEE Press, v. 1. p Farlei Heinen. Robótica Autônoma: Integração entre Planificação e Comportamento Reativo [SimRob2d] Trabalho de Conclusão de Curso. (Graduação em Informática) Univ. do Vale do Rio dos Sinos. Orientador: F. Osório Abril 2010 Luciane Fortes. Aplicação de Técnicas de Aprendizado para o Controle Inteligente de Veículos Autônomos Trabalho de Conclusão de Curso. (Graduação em Informática) Univ. do Vale do Rio dos Sinos. Orientador: F. Osório. Arquiteturas de Controle Híbridas Arquiteturas para Robôs Móveis Autônomos Demos do Material Apresentado: (software) Java Demo Dijkstra Java Demo Dijkstra Expanded A Star (A*) A* Demo1: A* Demo2: A* Demo3: A* Demo4: A* Descrição: Tutorial SBGames 2007 Campos Potenciais Demo Java: Intro: Intro: 64 Abril 2010 Comportamentos: Boids: Steering Behaviours: (Crayg Reynolds) Complementos: Wikipedia, A*_search_algorithm, D*_search_algorithm, Dijkstra's_algorith 32
33 Mapas Construção e Uso * Tipos de Mapas Mapas Sensorial, Mapa Métrico (Geométrico, Grade de Ocupação), Mapa Topológico, Informações Semânticas * Mapeamento Geração de Mapas de Ocupação Geração de Mapas Geométricos Geração de Mapas Topológicos * Navegação baseada em Mapas Planejamento de Trajetórias Desafios e Problemas de Navegação 65 Mapas Construção e Uso Controle de Robôs Móveis Autônomos Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control? 66 33
34 Mapas Construção e Uso Controle de Robôs Móveis Autônomos Perception? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching 67 Odometry, Dead Reckoning Localization base on external sensors, beacons or landmarks Probabilistic Map Based Localization Perception Observation raw sensor data or extracted features Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens - São mapas baseados em leituras diretas dos sensores, permitindo conectar de modo mais direto possível a representação do ambiente com as leituras sensoriais -A idéia básica é fazer medidas sensoriais conectadas com a informação de odometria, e então usar uma técnica como servo-controle: Sensor-Based Servoing E.g. Image-Based Servoing ou Visual Servoing [Dudek/Jenkin 2000 Seções 7.3 e 8.1] 68 34

 ou mesmo Imagens 69")


35 Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 69 Wikipedia: LIDAR Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 70 Sensor-Based Servoing 35
![Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 71 Sensor-Based Servoing [Matsumoto, Inaba, Inoue 1996] Mapa Métrico -](/docs-images/77/75049926/images/36-1.jpg "Armazena uma descrição métrica do ambiente. - Tipos de Mapas Métricos: Mapa de Ocupação (e.g.")
36 Mapa Sensorial -Armazena os dados brutos obtidos a partir dos sensores: Nuvem de pontos (Sonar, IR, Laser) ou mesmo Imagens 71 Sensor-Based Servoing [Matsumoto, Inaba, Inoue 1996] Mapa Métrico - Armazena uma descrição métrica do ambiente. - Tipos de Mapas Métricos: Mapa de Ocupação (e.g. grid 2D) Mapa Geométrico 2D (e.g. planta baixa 2D) Mapa Geométrico 3D (e.g. representação em VRML do ambiente) - Os mapas métricos podem ser definidos a priori e fornecidos ao robô, mas também podem ser obtidos (construídos) pelo próprio robô a partir de suas leituras sensoriais do ambiente. - Mapas métricos devem respeitar as dimensões e relações de tamanho e distância entre objetos e elementos presentes no ambiente
37 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D 73 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D 74 Definições: - Resolução/Amostragem (Lin x Col) - Dimensão/Proporção (cada elemento da grade corresponde a X cm 2 ) - Informação da célula da grade (valores, quantização) 37
 - Dimensão/Proporção (cada elemento da grade")

38 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D 75 Definições: - Resolução/Amostragem (Lin x Col) - Dimensão/Proporção (cada elemento da grade corresponde a X cm 2 ) - Informação da célula da grade (valores, quantização) Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D Mapas Probabilísticos (Grau de Certeza) 76 38
![Mapa Métrico Mapeamento usando Mapas de Ocupação: usando um Sonar para mapear o ambiente Algoritmo HIMM [Borenstein 91] Histogramic In-Motion Mapping 77 [Edson Prestes e](/docs-images/77/75049926/images/39-2.jpg "Silva Jr 2003] Mapa Métrico Mapeamento usando Mapas de Ocupação Certainty Occupancy Grids, HIMM [Elfes 87, 98] [Borenstein 91] [Prestes 2003] 78 [Edson Prestes e Silva Jr")
39 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando um Sonar para mapear o ambiente Algoritmo HIMM [Borenstein 91] Histogramic In-Motion Mapping 77 [Edson Prestes e Silva Jr 2003] Mapa Métrico Mapeamento usando Mapas de Ocupação Certainty Occupancy Grids, HIMM [Elfes 87, 98] [Borenstein 91] [Prestes 2003] 78 [Edson Prestes e Silva Jr 2003] 39

![91] Mapas de Ocupação 80 [Thrun](/docs-images/77/75049926/images/40-1.jpg "2002] 40")
40 Mapa Métrico Mapeamento usando Mapas de Ocupação 79 [Borenstein 91] Mapa Métrico Mapeamento usando Mapas de Ocupação 80 [Thrun 2002] 40

41 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente 81 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente S. Thrun 82 41



42 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente - Sensor Laser - Localização! - Mapeamento com certainty grids 83 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente - Sensor Laser - Localização! - Mapeamento com certainty grids ERRO DE LOCALIZAÇÃO! 84 42



43 Mapa Métrico Mapeamento usando Mapas de Ocupação: usando o Laser para mapear o ambiente Environment Map: Occupancy Grid 85 Sebastian Thrun / CMU Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D com diferentes representações 86 Adaptive Cell Decomposition 43


44 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa de Ocupação Grade 2D com diferentes representações Potential Fields 87 Mapa Métrico Armazenando uma descrição métrica do ambiente: Exact Cell Decomposition Mapa de Ocupação Grade 2D com diferentes representações 88 44
45 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Planta baixa de um prédio Navegar do Ponto A até o Ponto B 89 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Planta baixa de um prédio Navegar do Ponto A até o Ponto B 90 45


46 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico 91 Points corresponding to a single laser reading Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico Mapeamento: -Nuvem de pontos - Extração de contorno 92 46
47 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico Laser Reading Laser Reading with Detected Lines Porta 93 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Do Mapa Sensorial ao Mapa Geométrico >> Problema das múltiplas leituras


48 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Representações para Navegação Mapa Geométrico com grafo de visibilidade 95 Mapa Métrico Armazenando uma descrição métrica do ambiente: Mapa Geométrico 2D Representações para Navegação Mapa Geométrico com Diagrama de Voronoi 96 48
49 Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa Decomposição Topológica 97 Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa 98 49
50 Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa MAPAS 99 Mapa Topológico: Identifica as regiões do mapa e sua conectividade Pode ser associado a informações de odometria Mapa Topológico Armazenando uma descrição de conectividade do ambiente: Mapa Topológico Não é necessária uma representação métrica das distâncias e do tamanho dos elementos do mapa MAPAS 100 Mapa Topológico: Identifica as regiões do mapa e sua conectividade Pode ser associado a informações de odometria 50
 - Armário (elemento estático) - Locais no Mapa: Almoxarifado, Secretaria, Biblioteca, etc.")
51 Mapa Semântico Associando um sentido e função aos elementos do ambiente: Mapa Semântico Exemplos de Informações Semânticas: - Porta (estado da porta: aberta/fechada); - Elevador - Escada - Cadeira (elemento móvel) - Armário (elemento estático) - Locais no Mapa: Almoxarifado, Secretaria, Biblioteca, etc. 101 RMA: Navegação com Mapas Navegação Baseada em Mapas O tipo do mapa irá definir o algoritmo de navegação empregado. Por exemplo: Mapa de Ocupação: A*, campos potenciais Mapa Geométrico 2D: Grafo de Visibilidade, A* Mapa Topológico: Navegação por pontos de referência 102 Grafo de Visibilidade + Djikstra A Star (A*) 51
 ao mesmo tempo que se direciona para o alvo (atração) Destino Obstáculos Origem 103 Março 2009 Inimigo: Time")
 Navegação com desvio de obstáculos Navegação: Campos Potenciais")
 Adição repulsão; 6) Trajetória Potential Fields in Games: http://aigamedev.")
52 Navegação com desvio de obstáculos Navegação: Campos Potenciais Campos Potenciais permitem o desvio de obstáculos (repulsão) ao mesmo tempo que se direciona para o alvo (atração) Destino Obstáculos Origem 103 Março 2009 Inimigo: Time Azul (repulsão = Obstáculo) Amigo: Time Vermelho (atração = destino) Potential Fields in Games: (Obstáculos e Inimigos) Navegação com desvio de obstáculos Navegação: Campos Potenciais Março 2009 Potential Fields: 1) Origem/Destino; 2) Atração: Destino; 3) Propagação da Atração 4) Repulsão: Obstáculo; 5) Adição repulsão; 6) Trajetória Potential Fields in Games: (Obstáculos e Inimigos) 52





53 Navegação com desvio de obstáculos Navegação: Campos Potenciais [Demos] Sysquake LE 105 Março Navegação com desvio de obstáculos Navegação: Campos Potenciais [Demos] NAVEGAÇÃO GLOBAL x LOCAL A* + Campos Potenciais DESVIO: Repulsão aos obstáculos 106 Março 2009 Farlei Heinen
54 Navegação com desvio de obstáculos Navegação: Campos Potenciais [Demos] NAVEGAÇÃO GLOBAL x LOCAL A* + Campos Potenciais DESVIO: Repulsão aos obstáculos A* Planejamento Global Geração de WayPoints Alvo ALVO INTERMEDIÁRIO 107 Março 2009 Farlei Heinen - Navegação com desvio de obstáculos Navegação: Campos Potenciais Algoritmos: VFF Vector Force Fields VFH Vector Force Histogram Implementado no Player/Stage IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7, NO. 3, JUNE 1991 The Vector Field Histogram-Fast Obstacle Avoidance for Mobile Robots Johann Borenstein, Yoram Koren. WEB: Março 2009 Virtual Force Field (VFF) concept: Occupied cells exert repulsive forces onto the robot; magnitude is proportional to the certainty value c(i,j) of the cell and inversely proportional to r^2 54
: The above")



55 Navegação com desvio de obstáculos Algoritmos: VFH Vector Force Histogram 109 Março 2009 Virtual Force Histogram (VFH): The above figure is the heart of the VFH method Mapping active cells onto the polar histogram: Safe and Unsafe cells. Navegação com desvio de obstáculos Navegação baseada em Referências * REFERÊNCIA baseada na DIREÇÃO: Orientação do Destino * REFERÊNCIA baseada em PONTOS: WayPoints * REFERÊNCIA baseada em MARCOS: LandMarks GPS Março
56 Navegação com desvio de obstáculos Navegação: Sistemas Híbridos Navegação: A* + Campos Potenciais Navegação: WayPoints + LandMarks Navegação: Coordenada/Direção + RNA SISTEMAS HÍBRIDOS - Necessidade de um árbitro para selecionar o comportamento adequado e a ação a ser realizada. - Múltiplos comportamentos com seleção: Behavior Selection / Coordination 111 Março 2009 Path Planning Overview Mapas Construção e Uso 1. Road Map, Graph construction Identify a set of routes within the free space 2. Cell decomposition Discriminate between free and occupied cells Where to put the nodes? Topology-based: 112 at distinctive locations Metric-based: where features disappear or get visible Where to put the cell boundaries? Topology- and metric-based: where features disappear or get visible 3. Potential Field Imposing a mathematical function over the space 56
57 Referências Bibliográficas: Mapas Livros/Slides: * Probabilistic Robotics - The MIT Press (2005) Sebastian Thrun, Wolfram Burgard, Dieter Fox * Introduction to Autonomous Mobile Robots (2004) Roland Siegwart and Illah Nourbakhsh * Computational Principles of Mobile Robotics (2000) Gregory Dudek, Michael Jenkin 113 Material Complementar: Farlei Heinen Dissertação de Mestrado ou Edson Prestes e Silva Jr. Tese de Doutorado Referências Bibliográficas: Mapas Ferramentas e Softwares: * V-REP Simulator: * MORSE Simulator: * Gazebo Simulator: * Player-stage: Robótica: SBC Comissão Especial de Robótica CE-R IEEE Robotics and Automation Society (RAS) South Brazil Chapter
58 INFORMAÇÕES SOBRE A DISCIPLINA USP - Universidade de São Paulo - São Carlos, SP ICMC - Instituto de Ciências Matemáticas e de Computação SSC Depto. de Sistemas de Computação GRM - Grupo de Pesquisa em Robóticá Móvel LRM Lab. de Robótica Móvel: Prof. Fernando Santos OSÓRIO Web institucional: Página pessoal: fosorio [at] icmc. usp. br ou fosorio [at] gmail. com 115 Março 2016 Disciplina de Robôs Móveis Autônomos (PG-CCMC) Web Disciplinas: Programa, Material de Aulas, Critérios de Avaliação, Material de Apoio, Trabalhos Práticos Wiki: 58
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto Nacional de C&T
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto Nacional de C&T
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 02 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
Temas Principais: Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,...
 3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
3 Robótica Inteligente e Veículos Autônomos Temas Principais: Introdução Parte I Tipos de Robôs Parte II Manipuladores, Robôs Móveis Terrestres, Aquáticos, Aéreos,... Parte III Inteligência & Robôs Modelos
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
Robótica Autônoma Sensores e Atuadores
 * Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
* Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Rastreamento de Objetos Baseado em Grafos. Casamento Inexato entre Grafos Relacionais com Atributos
 Rastreamento de Objetos Baseado em Casamento Inexato entre Grafos Relacionais com Atributos Exame de Qualificação de Mestrado Ana Beatriz Vicentim Graciano Orientador: Roberto M. Cesar Jr. Colaboradora:
Rastreamento de Objetos Baseado em Casamento Inexato entre Grafos Relacionais com Atributos Exame de Qualificação de Mestrado Ana Beatriz Vicentim Graciano Orientador: Roberto M. Cesar Jr. Colaboradora:
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
Inteligência Artificial - IA. Agentes Inteligentes Cont.
 Agentes Inteligentes Cont. 1 Caracterização de agente - M. A. A. S. (P.E.A.S) Medida desempenho Ambiente Atuadores Sensores Agente filtro de e-mail Minimizar carga de leitura usuário mensagens do usuário
Agentes Inteligentes Cont. 1 Caracterização de agente - M. A. A. S. (P.E.A.S) Medida desempenho Ambiente Atuadores Sensores Agente filtro de e-mail Minimizar carga de leitura usuário mensagens do usuário
Introdução ao Processamento de Imagens Digitais Aula 01
 Introdução ao Processamento de Imagens Digitais Aula 01 Douglas Farias Cordeiro Universidade Federal de Goiás 06 de julho de 2015 Mini-currículo Professor do curso Gestão da Informação Formação: Graduação
Introdução ao Processamento de Imagens Digitais Aula 01 Douglas Farias Cordeiro Universidade Federal de Goiás 06 de julho de 2015 Mini-currículo Professor do curso Gestão da Informação Formação: Graduação
Navegação autônoma de robôs baseada em técnicas de mapeamento e aprendizagem de máquina
 Navegação autônoma de robôs baseada em técnicas de mapeamento e aprizagem de máquina Alcides Xavier Benicasa 1 Resumo: Este artigo tem como objetivo principal apresentar um método de navegação autônoma
Navegação autônoma de robôs baseada em técnicas de mapeamento e aprizagem de máquina Alcides Xavier Benicasa 1 Resumo: Este artigo tem como objetivo principal apresentar um método de navegação autônoma
Ariadnes: um sistema de mapeamento e navegação autônoma em ambientes virtuais
 Ariadnes: um sistema de mapeamento e navegação autônoma em ambientes virtuais Thiago R. Nunes, Chrystiano S. Araújo, Leandro M. Cruz, Italo O. Matias Universidade Candido Mendes Campos dos Goytacazes -
Ariadnes: um sistema de mapeamento e navegação autônoma em ambientes virtuais Thiago R. Nunes, Chrystiano S. Araújo, Leandro M. Cruz, Italo O. Matias Universidade Candido Mendes Campos dos Goytacazes -
SUMÁRIO REGIMENTO INTERNO E ESTRUTURA CURRICULAR DO MESTRADO PROFISSIONALIZANTE EM CIÊNCIA DA COMPUTAÇÃO
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DE PERNAMBUCO BOLETIM OFICIAL NÚMERO ESPECIAL SUMÁRIO REGIMENTO INTERNO E ESTRUTURA CURRICULAR DO MESTRADO PROFISSIONALIZANTE EM CIÊNCIA DA COMPUTAÇÃO B. O.
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DE PERNAMBUCO BOLETIM OFICIAL NÚMERO ESPECIAL SUMÁRIO REGIMENTO INTERNO E ESTRUTURA CURRICULAR DO MESTRADO PROFISSIONALIZANTE EM CIÊNCIA DA COMPUTAÇÃO B. O.
Tipos de Robôs. Tipos de Robôs. Tipos de Robôs. Percepção Decisão Tipo de Mobilidade
 30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
UM SISTEMA DE NAVEGAÇÃO PARA O ROBÔ MÓVEL X80
 UM SISTEMA DE NAVEGAÇÃO PARA O ROBÔ MÓVEL X80 JOSÉ RENATO A. SOUTO, ROSIERY MAIA, ANDERSON A. SOUZA, BRUNO SANTANA Departamento de Computação Universidade do Estado do Rio Grande do Norte (UERN) Natal,
UM SISTEMA DE NAVEGAÇÃO PARA O ROBÔ MÓVEL X80 JOSÉ RENATO A. SOUTO, ROSIERY MAIA, ANDERSON A. SOUZA, BRUNO SANTANA Departamento de Computação Universidade do Estado do Rio Grande do Norte (UERN) Natal,
Sistema de Informação
 Sistema de Informação TCC em Re vista 2009 125 LOTTE, Rodolfo Georjute. Aprendizado conexionista em um sistema de busca por imagens. 2009. 104 f. Trabalho de Conclusão de Curso (Graduação em Sistemas
Sistema de Informação TCC em Re vista 2009 125 LOTTE, Rodolfo Georjute. Aprendizado conexionista em um sistema de busca por imagens. 2009. 104 f. Trabalho de Conclusão de Curso (Graduação em Sistemas
Inteligência Artificial. Prof. Ilaim Costa Jr.
 Inteligência Artificial Prof. Ilaim Costa Jr. 4) Ciência da Computação 4) Ciência da Computação Exemplos de Aplicação da IA Matemática: demonstração
Inteligência Artificial Prof. Ilaim Costa Jr. 4) Ciência da Computação 4) Ciência da Computação Exemplos de Aplicação da IA Matemática: demonstração
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Planejamento de trajetória para estacionamento de veículos autônomos. Marcos Gomes Prado
 Planejamento de trajetória para estacionamento de veículos autônomos Marcos Gomes Prado SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: Assinatura: Planejamento de trajetória para estacionamento
Planejamento de trajetória para estacionamento de veículos autônomos Marcos Gomes Prado SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: Assinatura: Planejamento de trajetória para estacionamento
Agentes Inteligentes. Módulo 02 27/02/2013. Inteligência Artificial. Profª Hemilis Joyse
 Agentes Inteligentes Módulo 02 1 Agente É tudo que pode ser considerado capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por intermédio de atuadores. 2 Agente Tabela parcial
Agentes Inteligentes Módulo 02 1 Agente É tudo que pode ser considerado capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por intermédio de atuadores. 2 Agente Tabela parcial
André Chaves Magalhães
 André Chaves Magalhães Planejamento Cinemático-Dinâmico de Movimento com Desvio Local de Obstáculos Utilizando Malhas de Estados Dissertação apresentada à Escola de Engenharia de São Carlos da Universidade
André Chaves Magalhães Planejamento Cinemático-Dinâmico de Movimento com Desvio Local de Obstáculos Utilizando Malhas de Estados Dissertação apresentada à Escola de Engenharia de São Carlos da Universidade
Inteligência Artificial Aplicada a Robôs Reais
 Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Introdução à Robótica Móvel
 à Robótica Móvel Aula 3 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Mckerrow, P. J. Introduction to Robotics. Addison Wesley, 1995. Borenstein,
à Robótica Móvel Aula 3 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Mckerrow, P. J. Introduction to Robotics. Addison Wesley, 1995. Borenstein,
Autonomous Vehicles:
 Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
COBERTURA DE ÁREA COOPERATIVA UTILIZANDO SEGMENTAÇÃO HEXAGONAL
 COBERTURA DE ÁREA COOPERATIVA UTILIZANDO SEGMENTAÇÃO HEXAGONAL HÉCTOR IGNÁCIO AZPÚRUA PÉREZ-IMAZ COBERTURA DE ÁREA COOPERATIVA UTILIZANDO SEGMENTAÇÃO HEXAGONAL Dissertação apresentada ao Programa de Pós-Graduação
COBERTURA DE ÁREA COOPERATIVA UTILIZANDO SEGMENTAÇÃO HEXAGONAL HÉCTOR IGNÁCIO AZPÚRUA PÉREZ-IMAZ COBERTURA DE ÁREA COOPERATIVA UTILIZANDO SEGMENTAÇÃO HEXAGONAL Dissertação apresentada ao Programa de Pós-Graduação
Navegação autônoma de robôs móveis e detecção de intrusos em ambientes internos utilizando sensores 2D e 3D. Diogo Santos Ortiz Correa
 Navegação autônoma de robôs móveis e detecção de intrusos em ambientes internos utilizando sensores 2D e 3D Diogo Santos Ortiz Correa SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: Assinatura:
Navegação autônoma de robôs móveis e detecção de intrusos em ambientes internos utilizando sensores 2D e 3D Diogo Santos Ortiz Correa SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: Assinatura:
Navegação Visual de Robôs Móveis Autônomos Baseada em Métodos de Correlação de Imagens
 Navegação Visual de Robôs Móveis Autônomos Baseada em Métodos de Correlação de Imagens Leandro Facchinetti Inst. de Ciências Matemáticas e de Computação - ICMC Universidade de São Paulo - USP São Carlos,
Navegação Visual de Robôs Móveis Autônomos Baseada em Métodos de Correlação de Imagens Leandro Facchinetti Inst. de Ciências Matemáticas e de Computação - ICMC Universidade de São Paulo - USP São Carlos,
SVM Support Vector Machine
 SVM Support Vector Machine Ø Introduction Ø Application to Indoor Localization (MLP x LVQ x SVM) Laboratório de Automação e Robótica - A. Bauchspiess Soft Computing - Neural Networks and Fuzzy Logic SVM
SVM Support Vector Machine Ø Introduction Ø Application to Indoor Localization (MLP x LVQ x SVM) Laboratório de Automação e Robótica - A. Bauchspiess Soft Computing - Neural Networks and Fuzzy Logic SVM
HORÁRIO ESCOLAR - CIÊNCIA DA COMPUTAÇÃO 2016 Atualizado 26/01/2016 INGRESSANTES A PARTIR DE 2010
 HORÁRIO ESCOLAR - CIÊNCIA DA COMPUTAÇÃO 2016 Atualizado 26/01/2016 INGRESSANTES A PARTIR DE 2010 1 0 ANO - 1 0. SEMESTRE (Grade Curricular Nova) Vespertino Lógica Matemática Discreta Integral I (Almir
HORÁRIO ESCOLAR - CIÊNCIA DA COMPUTAÇÃO 2016 Atualizado 26/01/2016 INGRESSANTES A PARTIR DE 2010 1 0 ANO - 1 0. SEMESTRE (Grade Curricular Nova) Vespertino Lógica Matemática Discreta Integral I (Almir
OMNET++ APLICADO À ROBÓTICA COOPERATIVA
 OMNET++ APLICADO À ROBÓTICA COOPERATIVA Daniel Costa Ramos Doutorando Disciplina de Redes de Comunicação Professor Carlos Montez 07/2014 2/25 Estrutura da Apresentação Introdução Robótica Cooperativa Material
OMNET++ APLICADO À ROBÓTICA COOPERATIVA Daniel Costa Ramos Doutorando Disciplina de Redes de Comunicação Professor Carlos Montez 07/2014 2/25 Estrutura da Apresentação Introdução Robótica Cooperativa Material
Inteligência Computacional
 Inteligência Computacional INTRODUÇÃO ÀS REDES NEURAIS ARTIFICIAIS Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Na Aula Passada... O que é uma
Inteligência Computacional INTRODUÇÃO ÀS REDES NEURAIS ARTIFICIAIS Renato Dourado Maia Faculdade de Ciência e Tecnologia de Montes Claros Fundação Educacional Montes Claros Na Aula Passada... O que é uma
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas
 Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Arquiteturas de Software
 Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Pesquisa e Desenvolvimento de Robôs Táticos para Ambientes Internos
 Pesquisa e Desenvolvimento de Robôs Táticos para Ambientes Internos Fernando Osório 1, Denis Wolf 1, Kalinka Castelo Branco 1, Jó Ueyama 1, Gustavo Pessin 1, Leandro Fernandes 1, Maurício Dias 1, Leandro
Pesquisa e Desenvolvimento de Robôs Táticos para Ambientes Internos Fernando Osório 1, Denis Wolf 1, Kalinka Castelo Branco 1, Jó Ueyama 1, Gustavo Pessin 1, Leandro Fernandes 1, Maurício Dias 1, Leandro
Inteligência Artificial
 Inteligência Artificial Licenciatura em Computação Prof. Adriano Avelar Site: www.adrianoavelar.com Email: eam.avelar@gmail.com Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por
Inteligência Artificial Licenciatura em Computação Prof. Adriano Avelar Site: www.adrianoavelar.com Email: eam.avelar@gmail.com Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por
ALAN PORTO BONTEMPO 1, MARLEY VELLASCO 1, KARLA FIGUEIREDO 1.
 UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEAMENTO SIMULTÂNEO PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO ALAN PORTO BONTEMPO 1, MARLEY VELLASCO 1, KARLA FIGUEIREDO 1. 1. Laboratório
UMA ABORDAGEM HÍBRIDA PARA LOCALIZAÇÃO E MAPEAMENTO SIMULTÂNEO PARA ROBÔS MÓVEIS COM SONARES ATRAVÉS DO FILTRO DE KALMAN ESTENDIDO ALAN PORTO BONTEMPO 1, MARLEY VELLASCO 1, KARLA FIGUEIREDO 1. 1. Laboratório
USO DA ARQUITETURA AURA - AUTONOMOUS ROBOT ARCHITECTURE EM UM ROBÔ EXPLORADOR DE LABIRINTO CONTROLADO POR RASPBERRY PI.
 USO DA ARQUITETURA AURA - AUTONOMOUS ROBOT ARCHITECTURE EM UM ROBÔ EXPLORADOR DE LABIRINTO CONTROLADO POR RASPBERRY PI. Resumo João Paulo Fernandes da Silva¹, Willame Balbino Bonfim 1. joaopauloibge@hotmail.com
USO DA ARQUITETURA AURA - AUTONOMOUS ROBOT ARCHITECTURE EM UM ROBÔ EXPLORADOR DE LABIRINTO CONTROLADO POR RASPBERRY PI. Resumo João Paulo Fernandes da Silva¹, Willame Balbino Bonfim 1. joaopauloibge@hotmail.com
Utilização de um Veículo submersível em Tarefas de manutenção
 Utilização de um Veículo submersível em Tarefas de manutenção Prof. M. Sc. Juan C. C. Luque Departamento de Eletrotécnica, TECSUP, Arequipa-Perú Prof. Dr. Decio Crisol Donha Departamento de Engenharia
Utilização de um Veículo submersível em Tarefas de manutenção Prof. M. Sc. Juan C. C. Luque Departamento de Eletrotécnica, TECSUP, Arequipa-Perú Prof. Dr. Decio Crisol Donha Departamento de Engenharia
Pontifícia Universidade Católica de São Paulo Programa de TIDD
 Disciplina: 2854 - Sistemas Inteligentes e Ambientes Virtuais Turma A Área de Concentração: Processos Cognitivos e Ambientes Digitais Linha de Pesquisa: Inteligência Coletiva e Ambientes Interativos Professor:
Disciplina: 2854 - Sistemas Inteligentes e Ambientes Virtuais Turma A Área de Concentração: Processos Cognitivos e Ambientes Digitais Linha de Pesquisa: Inteligência Coletiva e Ambientes Interativos Professor:
LEVANTAMENTO DE ESTRATÉGIAS DE GRANDES EQUIPES DA CATEGORIA SMALL-SIZE
 LEVANTAMENTO DE ESTRATÉGIAS DE GRANDES EQUIPES DA CATEGORIA SMALL-SIZE Autor: Denis de Castro Pereira Supervisão: André Luiz Carvalho Ottoni Departamento de Software Equipe UaiSoccer Robot Team Universidade
LEVANTAMENTO DE ESTRATÉGIAS DE GRANDES EQUIPES DA CATEGORIA SMALL-SIZE Autor: Denis de Castro Pereira Supervisão: André Luiz Carvalho Ottoni Departamento de Software Equipe UaiSoccer Robot Team Universidade
Aprendizado por Árvores de Decisão
 Universidade Federal de Santa Maria Departamento de Eletrônica e Computação Prof. Cesar Tadeu Pozzer Disciplina de Programação de Jogos 3D E-mail: pozzer@inf.ufsm.br Período: 2006/01 Aprendizado por Árvores
Universidade Federal de Santa Maria Departamento de Eletrônica e Computação Prof. Cesar Tadeu Pozzer Disciplina de Programação de Jogos 3D E-mail: pozzer@inf.ufsm.br Período: 2006/01 Aprendizado por Árvores
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
Navegação Autônoma de Robôs Móveis Usando Localização e Mapeamento Simultâneos Alexander Hugo Tártari
 Unioeste - Universidade Estadual do Oeste do Paraná CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS Colegiado de Ciência da Computação Curso de Bacharelado em Ciência da Computação Navegação Autônoma de Robôs
Unioeste - Universidade Estadual do Oeste do Paraná CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS Colegiado de Ciência da Computação Curso de Bacharelado em Ciência da Computação Navegação Autônoma de Robôs
Universidade do Vale do Rio dos Sinos - UNISINOS Centro de Ciências Exatas e Tecnológicas Mestrado em Computação Aplicada - PIPCA
 Universidade do Vale do Rio dos Sinos - UNISINOS Centro de Ciências Exatas e Tecnológicas Mestrado em Computação Aplicada - PIPCA Dissertação de Mestrado Sistema de Controle Híbrido para Robôs Móveis Autônomos
Universidade do Vale do Rio dos Sinos - UNISINOS Centro de Ciências Exatas e Tecnológicas Mestrado em Computação Aplicada - PIPCA Dissertação de Mestrado Sistema de Controle Híbrido para Robôs Móveis Autônomos
2011 Profits Consulting. Inteligência Computacional
 Inteligência Computacional Quem Somos Excelência em Soluções Tecnológicas A Profits Consulting é uma empresa composta por consultores com ampla experiência em Tecnologia que desenvolve soluções inovadoras,
Inteligência Computacional Quem Somos Excelência em Soluções Tecnológicas A Profits Consulting é uma empresa composta por consultores com ampla experiência em Tecnologia que desenvolve soluções inovadoras,
Máquinas de suporte vetorial e sua aplicação na detecção de spam
 e sua aplicação na detecção de spam Orientador: Paulo J. S. Silva (IME-USP) Universidade de São Paulo Instituto de Matemática e Estatística Departamento de Ciência da Computação MAC499 Trabalho de Formatura
e sua aplicação na detecção de spam Orientador: Paulo J. S. Silva (IME-USP) Universidade de São Paulo Instituto de Matemática e Estatística Departamento de Ciência da Computação MAC499 Trabalho de Formatura
SISTEMA GUARDIÃO. Manual de Usuário
 SISTEMA GUARDIÃO Manual de Usuário Resumo Neste documento é apresentada uma breve descrição das funcionalidades e da utilização do sistema integrado de detecção de anomalias em redes GUARDIÃO. Versão 1.0
SISTEMA GUARDIÃO Manual de Usuário Resumo Neste documento é apresentada uma breve descrição das funcionalidades e da utilização do sistema integrado de detecção de anomalias em redes GUARDIÃO. Versão 1.0
Desenvolvimento de um Sistema Híbrido para Rastreamento
 Desenvolvimento de um Sistema Híbrido para Rastreamento de Objetos aplicado ao Futebol de Robôs Eduardo W. Basso 1, Diego M. Pereira 2, Paulo Schreiner 2 1 Laboratório de Robótica Inteligente Instituto
Desenvolvimento de um Sistema Híbrido para Rastreamento de Objetos aplicado ao Futebol de Robôs Eduardo W. Basso 1, Diego M. Pereira 2, Paulo Schreiner 2 1 Laboratório de Robótica Inteligente Instituto
PROJETO DE INCLUSÃO DE DISCIPLINAS OPTATIVAS NO CURSO DE BACHARELADO EM SISTEMAS DE INFORMAÇÃO CAMPUS CURITIBA
 PR UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Ministério da Educação Universidade Tecnológica Federal do Paraná Campus Curitiba Curso de Bacharelado em Sistemas de Informação PROJETO DE INCLUSÃO DE DISCIPLINAS
PR UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Ministério da Educação Universidade Tecnológica Federal do Paraná Campus Curitiba Curso de Bacharelado em Sistemas de Informação PROJETO DE INCLUSÃO DE DISCIPLINAS
Resolução de Problemas
 Resolução de Problemas 1 Agente de Resolução de Problemas (1/2) 2 O agente reativo Escolhe suas ações com base apenas nas percepções atuais não pode pensar no futuro, não sabe aonde vai 4 5 8 1 6 7 2 3?
Resolução de Problemas 1 Agente de Resolução de Problemas (1/2) 2 O agente reativo Escolhe suas ações com base apenas nas percepções atuais não pode pensar no futuro, não sabe aonde vai 4 5 8 1 6 7 2 3?
PLANEJAMENTO DE TRAJETÓRIAS PARA ROBÔS MÓVEIS EM AMBIENTES DESCONHECIDOS
 PLANEJAMENTO DE TRAJETÓRIAS PARA ROBÔS MÓVEIS EM AMBIENTES DESCONHECIDOS GUILHERME DE LIMA OTTONI Engenharia de Computação, Fundação Universidade Federal do Rio Grande Av. Itália, Km 8, 96201-900 Rio Grande,
PLANEJAMENTO DE TRAJETÓRIAS PARA ROBÔS MÓVEIS EM AMBIENTES DESCONHECIDOS GUILHERME DE LIMA OTTONI Engenharia de Computação, Fundação Universidade Federal do Rio Grande Av. Itália, Km 8, 96201-900 Rio Grande,
Aula 13 Roteamento Dinâmico com Protocolos Link-State (Protocolo OSPF)
") Disciplina: Dispositivos de Rede I Professor: Jéferson Mendonça de Limas 3º Semestre Aula 13 Roteamento Dinâmico com Protocolos Link-State (Protocolo OSPF) 2014/1 Roteiro de Aula Introdução Funcionamento
Disciplina: Dispositivos de Rede I Professor: Jéferson Mendonça de Limas 3º Semestre Aula 13 Roteamento Dinâmico com Protocolos Link-State (Protocolo OSPF) 2014/1 Roteiro de Aula Introdução Funcionamento
Sistemas de Informação e Decisão. Douglas Farias Cordeiro
 Sistemas de Informação e Decisão Douglas Farias Cordeiro Decisão Tomamos decisões a todo momento! O que é uma decisão? Uma decisão consiste na escolha de um modo de agir, entre diversas alternativas possíveis,
Sistemas de Informação e Decisão Douglas Farias Cordeiro Decisão Tomamos decisões a todo momento! O que é uma decisão? Uma decisão consiste na escolha de um modo de agir, entre diversas alternativas possíveis,
GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Geovany Araujo Borges
 Introdução à Robótica Móvel Geovany Araujo Borges Grupo de Instrumentação, Controle e Automação (GICA) Grupo de Automação, Robótica e Visão Computacional (GRAV) Grupo de Processamento Digital de Sinais
Introdução à Robótica Móvel Geovany Araujo Borges Grupo de Instrumentação, Controle e Automação (GICA) Grupo de Automação, Robótica e Visão Computacional (GRAV) Grupo de Processamento Digital de Sinais
Robótica Inteligente
 Robótica Inteligente Módulos Funcionais de um (hipotético) Robô Móvel Inteligente: Módulos Funcionais relacionados com o Controlo Módulos da Arquitectura de controlo hipotética Objectivos essenciais na
Robótica Inteligente Módulos Funcionais de um (hipotético) Robô Móvel Inteligente: Módulos Funcionais relacionados com o Controlo Módulos da Arquitectura de controlo hipotética Objectivos essenciais na
Pré processamento de dados II. Mineração de Dados 2012
 Pré processamento de dados II Mineração de Dados 2012 Luís Rato Universidade de Évora, 2012 Mineração de dados / Data Mining 1 Redução de dimensionalidade Objetivo: Evitar excesso de dimensionalidade Reduzir
Pré processamento de dados II Mineração de Dados 2012 Luís Rato Universidade de Évora, 2012 Mineração de dados / Data Mining 1 Redução de dimensionalidade Objetivo: Evitar excesso de dimensionalidade Reduzir
SECRETARIA DE ESTADO DA EDUCAÇÃO SUPERINTENDÊNCIA DE ESTADO DA EDUCAÇÃO DIRETORIA DE TECNOLOGIA EDUCACIONAL
 1 Título: Localizando-se... 2 Autora: Adriana Regina Perez Rech 3 Docente: Lisiane Cristina Amplatz 4 Aplicativo utilizado: Geogebra 5 Disciplina: Matemática 6 Objetivos / Expectativas de aprendizagem:
1 Título: Localizando-se... 2 Autora: Adriana Regina Perez Rech 3 Docente: Lisiane Cristina Amplatz 4 Aplicativo utilizado: Geogebra 5 Disciplina: Matemática 6 Objetivos / Expectativas de aprendizagem:
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Edirlei Soares de Lima Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Edirlei Soares de Lima Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
Redes de Computadores
 Redes de Computadores Apresentação do Curso Prof. Jó Ueyama Fevereiro/2014 SSC0540-2014 Sejam bem-vindos! SSC0540 Redes de Computadores Sistemas de Informação Terça 21:00 às 22:40 Sexta 19:00 às 20:40
Redes de Computadores Apresentação do Curso Prof. Jó Ueyama Fevereiro/2014 SSC0540-2014 Sejam bem-vindos! SSC0540 Redes de Computadores Sistemas de Informação Terça 21:00 às 22:40 Sexta 19:00 às 20:40
Escolhendo um Modelo de Ciclo de Vida
 Escolhendo um Modelo de Ciclo de Vida Ciclos de Vida 1 Ciclo de Vida de um Produto Qualquer desenvolvimento de produto inicia com uma idéia e termina com o produto pretendido. O ciclo de vida de um produto
Escolhendo um Modelo de Ciclo de Vida Ciclos de Vida 1 Ciclo de Vida de um Produto Qualquer desenvolvimento de produto inicia com uma idéia e termina com o produto pretendido. O ciclo de vida de um produto
Grade Curricular do Curso de Graduação em Engenharia de Computação
 Grade Curricular do Curso de Graduação em Engenharia de Computação Currículo 6 Aprovado pelo CDI em 30/05/16 - Carga Horária - Carga Horária Núcleo Básico 1.280h Carga Horária Núcleo Profissionalizante
Grade Curricular do Curso de Graduação em Engenharia de Computação Currículo 6 Aprovado pelo CDI em 30/05/16 - Carga Horária - Carga Horária Núcleo Básico 1.280h Carga Horária Núcleo Profissionalizante
Paradigmas de Programação
 Paradigmas de Programação Sintaxe e semântica Aula 4 Prof.: Edilberto M. Silva http://www.edilms.eti.br Prof. Edilberto Silva / edilms.eti.br Sintaxe A sintaxe de uma linguagem de programação é a forma
Paradigmas de Programação Sintaxe e semântica Aula 4 Prof.: Edilberto M. Silva http://www.edilms.eti.br Prof. Edilberto Silva / edilms.eti.br Sintaxe A sintaxe de uma linguagem de programação é a forma
LEGO Mindstorm e suas aplicações
 Palestrante: Bruno César Prado Email: bu_prado@msn.com Professores: Prof. Maria das Graças Bruno Marietto Prof. Wagner Tanaka Botelho CMCC Centro de Matemática, Computação e Cognição http://www.youtube.com/watch?v=5xva2lfds18
Palestrante: Bruno César Prado Email: bu_prado@msn.com Professores: Prof. Maria das Graças Bruno Marietto Prof. Wagner Tanaka Botelho CMCC Centro de Matemática, Computação e Cognição http://www.youtube.com/watch?v=5xva2lfds18
Cliente-servidor Código móvel Agentes de software Processos pares. Prof a Ana Cristina B. Kochem Vendramin DAINF / UTFPR
 n n n n Cliente-servidor Código móvel Agentes de software Processos pares Prof a Ana Cristina B. Kochem Vendramin DAINF / UTFPR Arquiteturas em Sistemas Distribuídos Cliente- Servidor Client invocation
n n n n Cliente-servidor Código móvel Agentes de software Processos pares Prof a Ana Cristina B. Kochem Vendramin DAINF / UTFPR Arquiteturas em Sistemas Distribuídos Cliente- Servidor Client invocation
Autonomous Vehicles:
 Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Sistemas de Informações Gerenciais Apresentação da disciplina e proposta didática Prof. MSc Hugo Vieira L. Souza
 Sistemas de Informações Gerenciais Apresentação da disciplina e proposta didática Prof. MSc Hugo Vieira L. Souza Este documento está sujeito a copyright. Todos os direitos estão reservados para o todo
Sistemas de Informações Gerenciais Apresentação da disciplina e proposta didática Prof. MSc Hugo Vieira L. Souza Este documento está sujeito a copyright. Todos os direitos estão reservados para o todo
Programação. Robô Guia em Museu. Robôs Móveis - Aplicações. Oportunidade de: IP addresses and the port numbers of the components. Avaliação.
 SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
ROBÔ MENSAGEIRO BASEADO EM NAVEGAÇÃO PROBABILÍSTICA
 ROBÔ MENSAGEIRO BASEADO EM NAVEGAÇÃO PROBABILÍSTICA RESUMO Robôs móveis enfrentam diversas situações em que há várias fontes de incerteza. Seus sensores e atuadores são imprecisos e o ambiente em que eles
ROBÔ MENSAGEIRO BASEADO EM NAVEGAÇÃO PROBABILÍSTICA RESUMO Robôs móveis enfrentam diversas situações em que há várias fontes de incerteza. Seus sensores e atuadores são imprecisos e o ambiente em que eles
Algoritmos 2 - Introdução
 DAINF - Departamento de Informática Algoritmos 2 - Introdução Prof. Alex Kutzke (http://alex.kutzke.com.br/courses) 19 de Agosto de 2015 Slides adaptados do material produzido pelo Prof. Rodrigo Minetto
DAINF - Departamento de Informática Algoritmos 2 - Introdução Prof. Alex Kutzke (http://alex.kutzke.com.br/courses) 19 de Agosto de 2015 Slides adaptados do material produzido pelo Prof. Rodrigo Minetto
5 Validação do Software
 8 5 Validação do Software Para garantir que os resultados deste trabalho sejam confiáveis, é preciso validar o simulador quanto às leis da física. Para tal, este capítulo apresenta dois casos onde há soluções
8 5 Validação do Software Para garantir que os resultados deste trabalho sejam confiáveis, é preciso validar o simulador quanto às leis da física. Para tal, este capítulo apresenta dois casos onde há soluções
5COP096 TeoriadaComputação
 Sylvio 1 Barbon Jr barbon@uel.br 5COP096 TeoriadaComputação Aula 12 Prof. Dr. Sylvio Barbon Junior Sumário - Árvore Geradora Mínima - Teorema pare reconhecer arestas seguras; - Algoritmo de Prim; - Algoritmo
Sylvio 1 Barbon Jr barbon@uel.br 5COP096 TeoriadaComputação Aula 12 Prof. Dr. Sylvio Barbon Junior Sumário - Árvore Geradora Mínima - Teorema pare reconhecer arestas seguras; - Algoritmo de Prim; - Algoritmo
Controle Inteligente de Veículos Autônomos: Automatização do Processo de Estacionamento de Carros
 Controle Inteligente de Veículos Autônomos: Automatização do Processo de Estacionamento de Carros Fernando Osório, Farlei Heinen e Luciane Fortes UNISINOS Universidade do Vale do Rio dos Sinos Centro de
Controle Inteligente de Veículos Autônomos: Automatização do Processo de Estacionamento de Carros Fernando Osório, Farlei Heinen e Luciane Fortes UNISINOS Universidade do Vale do Rio dos Sinos Centro de
Introdução ao Processamento Gráfico
 Introdução ao Processamento Gráfico Leandro Tonietto Processamento Gráfico - Unisinos ltonietto@unisinos.br http://www.inf.unisinos.br/~ltonietto ago-09 Sumário Introdução e conceitos Resumo das linhas
Introdução ao Processamento Gráfico Leandro Tonietto Processamento Gráfico - Unisinos ltonietto@unisinos.br http://www.inf.unisinos.br/~ltonietto ago-09 Sumário Introdução e conceitos Resumo das linhas
Utilização das transformadas wavelets na detecção de características em um sinal de ECG
 Utilização das transformadas wavelets na detecção de características em um sinal de ECG Orientador: Prof. Dr. Aldo Artur Belardi Departamento: Engenharia Elétrica Candidato: Gabriel Diego Porfirio N FEI:.206.062-9
Utilização das transformadas wavelets na detecção de características em um sinal de ECG Orientador: Prof. Dr. Aldo Artur Belardi Departamento: Engenharia Elétrica Candidato: Gabriel Diego Porfirio N FEI:.206.062-9
Introdução à Computação Gráfica
 Computação Gráfica - Aula 1 (atualizada em 21/10/2015) glaucius@pelotas.ifsul.edu.br Introdução à Computação Gráfica Computação Gráfica Conceito É a área da Ciência da Computação que estuda a geração,
Computação Gráfica - Aula 1 (atualizada em 21/10/2015) glaucius@pelotas.ifsul.edu.br Introdução à Computação Gráfica Computação Gráfica Conceito É a área da Ciência da Computação que estuda a geração,
Inteligência Artificial para Jogos: Agentes especiais com permissão para matar... e raciocinar!
 Inteligência Artificial para Jogos: Agentes especiais com permissão para matar... e raciocinar! Fernando Osório - Gustavo Pessin - Sandro Ferreira - Vinícius Nonnenmacher UNISINOS - Universidade do Vale
Inteligência Artificial para Jogos: Agentes especiais com permissão para matar... e raciocinar! Fernando Osório - Gustavo Pessin - Sandro Ferreira - Vinícius Nonnenmacher UNISINOS - Universidade do Vale
TECNOLOGIA WEB. Formação: o Bacharel em Sistemas de Informações (SI); o MBA em Tecnologia da Informação e Comunicação (TIC).
; o MBA em Tecnologia da Informação e Comunicação (TIC).") DOCENTE PROFESSOR CELSO CANDIDO Formação: o Bacharel em Sistemas de Informações (SI); o MBA em Tecnologia da Informação e Comunicação (TIC). Conhecimentos: o Web Designer; o Arquitetura de Máquina; o Implementação
DOCENTE PROFESSOR CELSO CANDIDO Formação: o Bacharel em Sistemas de Informações (SI); o MBA em Tecnologia da Informação e Comunicação (TIC). Conhecimentos: o Web Designer; o Arquitetura de Máquina; o Implementação
{abrandao, mario.sarcinelli, tfbastos}@ele.ufes.br
 NAVEGAÇÃO DE ROBÔS MÓVEIS COM DESVIO DE OBSTÁCULOS: IMPLEMENTAÇÃO DE DESVIO TANGENCIAL MODIFICADO Alexandre S. Brandão, Mario Sarcineli Filho, Teodiano F. Bastos Filho UFES - Universidade Federal do Espírito
NAVEGAÇÃO DE ROBÔS MÓVEIS COM DESVIO DE OBSTÁCULOS: IMPLEMENTAÇÃO DE DESVIO TANGENCIAL MODIFICADO Alexandre S. Brandão, Mario Sarcineli Filho, Teodiano F. Bastos Filho UFES - Universidade Federal do Espírito
Demonstração Internacional da Plataforma de informações de tráfego e de trânsito
 Demonstração Internacional da Plataforma de informações de tráfego e de trânsito As grandes cidades e áreas metropolitanas encaram o aumento da demanda nos sistemas de transportes, especialmente nas regiões
Demonstração Internacional da Plataforma de informações de tráfego e de trânsito As grandes cidades e áreas metropolitanas encaram o aumento da demanda nos sistemas de transportes, especialmente nas regiões
Simulação Gráfica e Visão Computacional. Soraia Raupp Musse
 Simulação Gráfica e Visão Computacional Soraia Raupp Musse Objetivo Analisar exemplos comerciais e do estado-da-arte científicos que utilizam dados reais para aprimorar a qualidade de simulações e animações.
Simulação Gráfica e Visão Computacional Soraia Raupp Musse Objetivo Analisar exemplos comerciais e do estado-da-arte científicos que utilizam dados reais para aprimorar a qualidade de simulações e animações.
Ciência da Computação 1 0 Semestre de 2016
 Ciência da Computação 1 0 Semestre de 2016 Disciplina: LR2- Laboratório de Redes 2 Código: Série: 4 0 ano Semestre: 7 0 Carga Horária Semanal: 2 aulas Carga Horária Semestral: 34 aulas Coordenador: Julio
Ciência da Computação 1 0 Semestre de 2016 Disciplina: LR2- Laboratório de Redes 2 Código: Série: 4 0 ano Semestre: 7 0 Carga Horária Semanal: 2 aulas Carga Horária Semestral: 34 aulas Coordenador: Julio
Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111
 USP - ICMC - SSC SSC 0111 (Lab ELD I) - 2o. Semestre 2011 Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111 1 Agosto 2011 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail.
USP - ICMC - SSC SSC 0111 (Lab ELD I) - 2o. Semestre 2011 Disciplina de Laboratório de Elementos de Lógica Digital I SSC-0111 1 Agosto 2011 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail.
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real
 Capítulo 1 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf, Eduardo do Valle Simões, Fernando S. Osório, Onofre Trindade Junior Abstract This tutorial aims to present
Capítulo 1 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf, Eduardo do Valle Simões, Fernando S. Osório, Onofre Trindade Junior Abstract This tutorial aims to present
Triangulação de Delauney
 Triangulação de Delauney Um pedaço da superfície terrestre é chamado de terreno. Um terreno é uma superfície 2-dimensional em um espaço 3-dimensional com uma propriedade especial: cada linha vertical intercepta
Triangulação de Delauney Um pedaço da superfície terrestre é chamado de terreno. Um terreno é uma superfície 2-dimensional em um espaço 3-dimensional com uma propriedade especial: cada linha vertical intercepta
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular REALIZAÇÃO E PRODUÇÃO MULTIMÉDIA Ano Lectivo 2015/2016
 Programa da Unidade Curricular REALIZAÇÃO E PRODUÇÃO MULTIMÉDIA Ano Lectivo 205/206. Unidade Orgânica Ciências Humanas e Sociais (2º Ciclo) 2. Curso MESTRADO EM COMUNICAÇÃO MULTIMÉDIA 3. Ciclo de Estudos
Programa da Unidade Curricular REALIZAÇÃO E PRODUÇÃO MULTIMÉDIA Ano Lectivo 205/206. Unidade Orgânica Ciências Humanas e Sociais (2º Ciclo) 2. Curso MESTRADO EM COMUNICAÇÃO MULTIMÉDIA 3. Ciclo de Estudos
Sistema de recomendação de segundo nível para suporte à produção de matérias jornalísticas
 Demetrius Costa Rapello Sistema de recomendação de segundo nível para suporte à produção de matérias jornalísticas Dissertação de mestrado Dissertação apresentada como requisito parcial para a obtenção
Demetrius Costa Rapello Sistema de recomendação de segundo nível para suporte à produção de matérias jornalísticas Dissertação de mestrado Dissertação apresentada como requisito parcial para a obtenção
ANEXO B INFORMAÇÕES PESSOAIS
 ANEXO B INFORMAÇÕES PESSOAIS Nome: Telefone: e-mail: 1. Sexo: a.( ) Masculino b. ( ) Feminino 2. Idade: a. ( ) 21 30 anos b. ( ) 31 40 anos c. ( ) 41 50 anos d. ( ) Mais de 50 anos FORMAÇÃO. Obs.: Caso
ANEXO B INFORMAÇÕES PESSOAIS Nome: Telefone: e-mail: 1. Sexo: a.( ) Masculino b. ( ) Feminino 2. Idade: a. ( ) 21 30 anos b. ( ) 31 40 anos c. ( ) 41 50 anos d. ( ) Mais de 50 anos FORMAÇÃO. Obs.: Caso
3.1. Título: Módulo Gerador de Planos de Rotas para um Sistema de Navegação Autônoma Baseado na Arquitetura AuRA
 UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ Curso de Bacharelado em Ciência da Computação UNIOESTE - Campus de Cascavel MODELO PARA ELABORAÇÃO DE PROJETOS DE TRABALHO DE CONCLUSÃO DE CURSO 1. IDENTIFICAÇÃO
UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ Curso de Bacharelado em Ciência da Computação UNIOESTE - Campus de Cascavel MODELO PARA ELABORAÇÃO DE PROJETOS DE TRABALHO DE CONCLUSÃO DE CURSO 1. IDENTIFICAÇÃO
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 01 Resolução de problemas por meio de Busca Edirlei Soares de Lima Introdução Agentes Autônomos: Entidades autônomas capazes de observar o ambiente
INF 1771 Inteligência Artificial Aula 01 Resolução de problemas por meio de Busca Edirlei Soares de Lima Introdução Agentes Autônomos: Entidades autônomas capazes de observar o ambiente
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular INTRODUÇÃO À FISICA Ano Lectivo 2011/2012
 Programa da Unidade Curricular INTRODUÇÃO À FISICA Ano Lectivo 2011/2012 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Informática 3. Ciclo de Estudos 1º 4. Unidade
Programa da Unidade Curricular INTRODUÇÃO À FISICA Ano Lectivo 2011/2012 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Informática 3. Ciclo de Estudos 1º 4. Unidade