Inteligência Artificial Aplicada a Robôs Reais
|
|
|
- Rafael Bonilha Borges
- 7 Há anos
- Visualizações:
Transcrição
1 Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: simoes@icmc.usp.br

2 Pensamento: Quem acreditaria em uma Formiga em teoria? S. J. Gould, 1950 Como se projeta uma Girafa? O que é Vida Artificial?...

3 Sumário 1- Computação Evolutiva 1.1 Conceito 1.2 Inspiração na Natureza 1.3 Redes Neurais Artificiais 2- Aplicações da Computação Evolutiva na Robótica 2.1 Robótica Evolutiva 2.2 Implementação 2.3 Experimentos 2.4 Predação 3- Futebol de Robôs 4- Conclusões

4 1- Computação Evolutiva

5 1.1- Computação Evolutiva: Conceito g Sistemas de Computação Tradicionais: Problema Universo de Possíveis Soluções Tentar exaustivamente todas as possíveis soluções e escolher a mais adequada

6 1.1- Computação Evolutiva g Algoritmos Genéticos Universo de possíveis Soluções Problema 1 o Grupo de Soluções Teste de um critério definido e interrompimento do processo quando uma solução aceitável é produzida. Problema Combinação das melhores Soluções 2 o Grupo de Soluções

7 1.2- Computação Evolutiva: Conceito g Computação Evolutiva: Uma Seleção Natural artificial dos mais adequados agentes ou soluções g Premissa mais importante: Especificar o que é desejado do robô, sem definir como ele deve fazer para obter esse comportamento

8 1.3- Redes Neurais Artificiais g Redes Neurais Artificiais (cérebro dos Robôs): o o o
:")
9 1.3- Redes Neurais Artificiais g Generalização Aprendizado por Tutor Processa inf. ruidosa Rede Neural Arquitetura do Robô Sensores o o o Controlador Motor1 Motor2

10 2- Aplicações da Computação Evolutiva na Robótica

11 2.1- Robótica Evolutiva
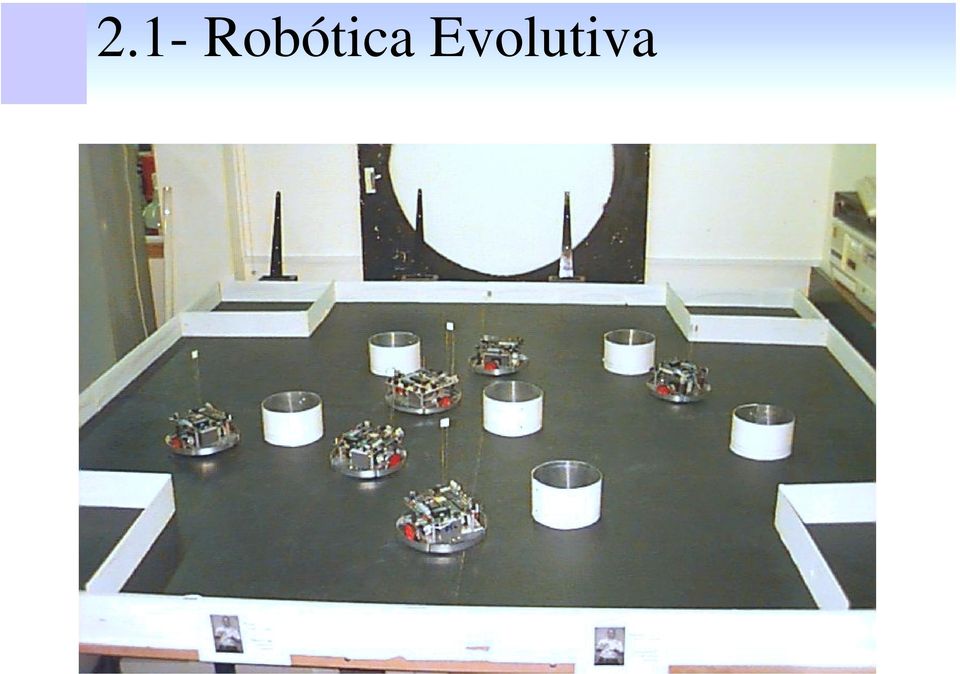
12 2.1- Robótica Evolutiva Processo Evolucionário: Estação de Trabalho Estação de Reprodução Testar a habilidade de Executar a tarefa Seleção dos Parceiros -- Canto de acasalamento Troca de Cromossomos Reconfiguração dos Robôs

13 2.1- Robótica Evolutiva

14 2.1- Robótica Evolutiva
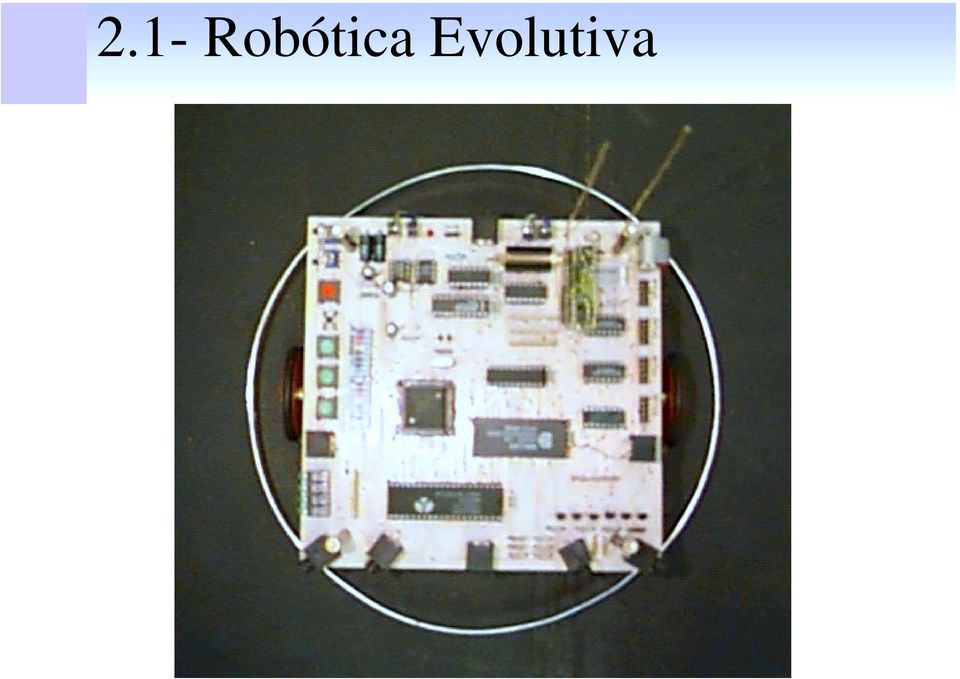
15 2.1- Robótica Evolutiva Material Genético Memória Circuito de Controle Morfologia g Configuração da Rede Neural g Velocidade de movimento g Seleção dos Sensores

16 2.2- Implementação g Arquitetura do Robô Sensores Módulo dos Sensores Rede Neural Módulo dos Motores Motores Posição e Alcance dos Sensores Configuração da Rede Neural ("Instinto") Velocidade e Manobras
")
17 2.3- Experimentos

18 2.3- Experimentos g Objetivo: Navegação sem Colisões Simples Robôs Complexo

19 2.3- Experimentos 400 Simple Environment 350 Complex Environment Fitness Fitness Generations Generations g 120 Gerações: (1 min.) g Pontuação do Melhor Robô Média da População

20 2.3- Experimentos 400 Simple Environment 350 Complex Environment Fitness Fitness Generations Generations Espécie 1 Um sensor frontal Espécie 2 Dois sensores, um frontal e outro lateral Espécie 3 Três sensores, um frontal e dois laterais

21 2.4- Predação Fitness Mutation Rate = 0.0% Predation NoPredation Simulated Generations
22 3- Futebol de Robôs
23 3.- Futebol de Robôs: Sistema g Sistema Inteligente de Futebol de Robôs g 3 Módulos Principais: Sistema de Visão Sistema Inteligente de estratégia de jogo Projeto dos Robôs Autônomos g Infra-estrutura: Campo Rádio-modem Iluminação Câmera de Vídeo
24 3.2- Futebol de Robôs: Visão Reconhecimento de cores Detectar a posição da bola e de cada robô Tabela com as coordenadas da bola e dos robôs
25 3.2- Futebol de Robôs: Estratégia de Jogo g Objetivo: Analisar a Situação Atual Planejar a estratégia de jogo Controlar cada robô do time g Diferentes Abordagens: Sistema de Decisão Baseado em Regras Sistema de Decisão Baseado em Regras com aprendizado por reforço Sistema Evolutivo Sistema de Agentes Autônomos distribuídos Rede Neural Artificial com treinamento por exemplos
26 3.2- Futebol de Robôs: Estratégia de Jogo g Fase 1: Visão Global e Inteligência Centralizado Imagem do Campo de Futebol Sistema de Visão Sistema Inteligente de Estratégia de Jogo 5 Robôs e Campo Rádio Modem Computador Servidor
27 3.2- Futebol de Robôs: Estratégia de Jogo g Fase 2: Visão Global e Inteligência Distribuída Imagem do Campo de Futebol Sistema Inteligente de Estratégia de Jogo Distribuído nos Robôs Sistema de Visão 5 Robôs e Campo Rádio Modem Computador Servidor
28 3.2- Futebol de Robôs: Estratégia de Jogo g Fase 3: Visão e Inteligência Distribuída Sistema de Visão e Sistema Inteligente de Estratégia de Jogo Distribuído nos Robôs 5 Robôs e Campo
29 3.3- Futebol de Robôs: RoboCup g By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team. g RoboCup Soccer Small Robot League (f-180) Middle Size Robot League (f-2000) Sony Legged Robot League Humanoid League g RoboCup Rescue g RoboCup Junior
30 3.3- Futebol de Robôs: RoboCup g Small Robot League (f-180) Campo: g 2,9m x 2,4m (cercado por muros); g superfície verde, plana e dura (qualquer textura); g marcações brancas da área, círculo central, etc. Bola de golfe laranja. Jogadores: g mínimo 1; máximo 5; g robôs claramente numerados; g goleiro designado antes da partida; g substituições ilimitadas.
31 3.3- Futebol de Robôs: RoboCup g Small Robot League (...continuação) Intervenção humana somente para pênaltis, escanteios, etc; Robôs: g até o tamanho de um cilindro de 180mm diâmetro; g identificação do time: amarelo ou azul (círculo 40mm); g identificação individual com outras cores; g 2 tempos de 10 minutos cada; Comunicação sem fio com computadores. Visão global externa local. Permitido o uso de mecanismos de chute. 80% da bola sempre deve estar livre;
32 3.3- Futebol de Robôs: RoboCup g Small Robot League (...continuação)

33 3.3- Futebol de Robôs: Estilo do Campo
34 3.4- Futebol de Robôs: FIRA g Federation of International Robot-soccer Association: g The main objective of FIRA is to take the spirit of science and technology to the laymen and the younger generation. g Categorias: MiroSot; NaroSot; HuroSot; KheperaSot; SimuroSot.
35 3.4- Futebol de Robôs: FIRA MiroSot g Micro Robot World Cup Soccer Tournament times de 3 robôs; 1 computador por time; tamanho dos robôs: cubos de 7,5cm; Small League: g campo: 150cm x 130cm; g gol de 40cm; g bola de golfe laranja. g 2 tempos de 5 minutos cada; g visão global permitida. Middle League: g campo: 220cm x 180cm;
36 3.4- Futebol de Robôs: FIRA MiroSot g Campeonato da FIRA em 2002 na categoria MiroSot
37 3.5- Futebol de Robôs: CBF-R g Comissão Brasileira de Futebol de Robôs A partir de Setembro de 2002 Reunir a comunidade no Brasil Lista de Discussão: g CBFR-l@sbc.org.br g g realizar troca de idéias; g organizar campeonato nacional; g discutir as regras; Adesão da comunidade é da maior importância!!!
38 3.5- Futebol de Robôs: CBF-R g Campeonato Nacional 1a edição do Campeonato Nacional da CBF-R no IEEE LATIN AMERICAN CONTEST FOR ROBOTICS g A ser realizado em Bauru, de 17 a 19 de setembro, junto ao VI Simpósio Brasileiro de Automação Inteligente; g 1. Beginners Lego Competition g 2. Advanced Competition g 3. Robot Soccer 1 (close to MIROSOT league from FIRA) g 4. Robot Soccer 2 (close to F-180 league from Robocup) g 5. Robot Soccer Simulation (Simulation League Robocup)
39 4- Conclusão g A Computação Evolutiva pode contribuir muito com a Robótica Evolução Contínua X Busca de Solução Produz soluções aceitáveis para problemas de navegação e desvio de obstáculos Possibilita auto-programação de sistemas complexos Construção de 40 robôs móveis autônomos Construção de dois times de futebol contendo 5 robôs Grupo de Estudos Avançados em Robótica GEAR
40 FIM Cópia das transparências e referências bibliográficas podem ser obtidas no site: simoes@icmc.usp.br
Inteligência Artificial Aplicada a Robôs Reais
 Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP http://www.icmc.usp.br/~simoes/seminars/semi.html email: simoes@icmc.usp.br
Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP http://www.icmc.usp.br/~simoes/seminars/semi.html email: simoes@icmc.usp.br
Estratégias de Gerenciamento de Grandes Grupos de Pesquisadores
 Estratégias de Gerenciamento de Grandes Grupos de Pesquisadores Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Estratégias de Gerenciamento de Grandes Grupos de Pesquisadores Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Sumário. Estratégias de Gerenciamento de Grandes Grupos de Pesquisadores. 1- Aspectos práticos no Gerenciamento de Grupos Agregar. 1.
 Estratégias de Gerenciamento de Grandes Grupos de Pesquisadores Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Estratégias de Gerenciamento de Grandes Grupos de Pesquisadores Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas
 Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Robótica Evolutiva uma População de Robôs Reais que Fazem Amor e Geram Descendentes Enquanto Aprendem a Realizar Tarefas Eduardo Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University
Processo Seletivo da Equipe USPDroids
 Processo Seletivo da Equipe USPDroids USPDroids Laboratório de Aprendizado de Robôs - ICMC - USP USPDroids (LAR - ICMC) USPDroids 1 / 37 Introdução Sumário 1 Introdução 2 Visão 3 Estratégia 4 Eletrônica
Processo Seletivo da Equipe USPDroids USPDroids Laboratório de Aprendizado de Robôs - ICMC - USP USPDroids (LAR - ICMC) USPDroids 1 / 37 Introdução Sumário 1 Introdução 2 Visão 3 Estratégia 4 Eletrônica
Computação Evolutiva aplicada a Robôs Reais
 Computação Evolutiva aplicada a Robôs Reais Eduardo D. V. Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University of Kent at Canterbury, UK Recém-Doutor no Laboratório de Robotica Inteligente
Computação Evolutiva aplicada a Robôs Reais Eduardo D. V. Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University of Kent at Canterbury, UK Recém-Doutor no Laboratório de Robotica Inteligente
Computação Bioinspirada: Aplicações
 Computação Bioinspirada: Aplicações Prof. Eduardo do Valle Simões Grupo de Sistemas Embarcados e Evolutivos LCR Laboratório de Computação Reconfigurável Departamento de Sistemas de Computação Projeto de
Computação Bioinspirada: Aplicações Prof. Eduardo do Valle Simões Grupo de Sistemas Embarcados e Evolutivos LCR Laboratório de Computação Reconfigurável Departamento de Sistemas de Computação Projeto de
Pensamento: Computação Evolutiva aplicada a Robôs Reais. Sumário. 1- Computação Evolutiva Computação Evolutiva: Conceito
 Computação Evolutiva aplicada a Robôs Reais Eduardo D. V. Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University of Kent at Canterbury, UK Recém-Doutor no Laboratório de Robotica Inteligente
Computação Evolutiva aplicada a Robôs Reais Eduardo D. V. Simões Mestrado em Microeletrônica UFRGS Doutorado em Robótica University of Kent at Canterbury, UK Recém-Doutor no Laboratório de Robotica Inteligente
Implementação de um Time para a categoria RoboCup Soccer Simulation 3D
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Implementação de um Time para a categoria RoboCup Soccer Simulation 3D Luiz Antonio
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Implementação de um Time para a categoria RoboCup Soccer Simulation 3D Luiz Antonio
DESENVOLVIMENTO DE ROBÔS MÓVEIS PARA IMPLANTAÇÃO DE UM TIME DE FUTEBOL DE ROBÔS DO IFSULDEMINAS RESUMO
 6ª Jornada Científica e Tecnológica e 3º Simpósio de Pós-Graduação do IFSULDEMINAS 04 e 05 de novembro de 2014, Pouso Alegre/MG DESENVOLVIMENTO DE ROBÔS MÓVEIS PARA IMPLANTAÇÃO DE UM TIME DE FUTEBOL DE
6ª Jornada Científica e Tecnológica e 3º Simpósio de Pós-Graduação do IFSULDEMINAS 04 e 05 de novembro de 2014, Pouso Alegre/MG DESENVOLVIMENTO DE ROBÔS MÓVEIS PARA IMPLANTAÇÃO DE UM TIME DE FUTEBOL DE
Desenvolvimento de Estratégia para Programação do Futebol de Robôs
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 0 de julho de 006 Campo Grande, MS Desenvolvimento de Estratégia para Programação do Futebol de Robôs Wânderson O. Assis,
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 0 de julho de 006 Campo Grande, MS Desenvolvimento de Estratégia para Programação do Futebol de Robôs Wânderson O. Assis,
TDP do time RECIFE SOCCER Futebol SPL
 1 TDP do time RECIFE SOCCER Futebol SPL Gabriel Alves da Silva 1, Paulo Martins Monteiro 2, Pedro Ferreira da Silva Junior 3, Simone Gomes Zelaquett 4, Tasso Luís Oliveira de Moraes 5. Resumo Este artigo
1 TDP do time RECIFE SOCCER Futebol SPL Gabriel Alves da Silva 1, Paulo Martins Monteiro 2, Pedro Ferreira da Silva Junior 3, Simone Gomes Zelaquett 4, Tasso Luís Oliveira de Moraes 5. Resumo Este artigo
Computação Evolutiva Eduardo do Valle Simões Renato Tinós ICMC - USP
 Computação Evolutiva Eduardo do Valle Simões Renato Tinós ICMC - USP 1 Principais Tópicos Introdução Evolução Natural Algoritmos Genéticos Aplicações Conclusão 2 Introdução http://www.formula-um.com/ Como
Computação Evolutiva Eduardo do Valle Simões Renato Tinós ICMC - USP 1 Principais Tópicos Introdução Evolução Natural Algoritmos Genéticos Aplicações Conclusão 2 Introdução http://www.formula-um.com/ Como
Desenvolvimento de uma Arquitetura Híbrida e Distribuída para Sistemas Multiagentes e sua Aplicação no Futebol de Robôs
 UNIVERSIDADE FEDERAL DE SANTA CATARINA PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CLAUDIO JOSE BIAZUS Desenvolvimento de uma Arquitetura Híbrida e Distribuída para Sistemas Multiagentes e sua Aplicação
UNIVERSIDADE FEDERAL DE SANTA CATARINA PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CLAUDIO JOSE BIAZUS Desenvolvimento de uma Arquitetura Híbrida e Distribuída para Sistemas Multiagentes e sua Aplicação
A INICIAÇÃO CIENTÍFICA COMO INSTRUMENTO NA FORMAÇÃO DE FUTUROS PESQUISADORES NO INSTITUTO MAUÁ DE TECNOLOGIA
 A INICIAÇÃO CIENTÍFICA COMO INSTRUMENTO NA FORMAÇÃO DE FUTUROS PESQUISADORES NO INSTITUTO MAUÁ DE TECNOLOGIA Alessandra Dutra Coelho 1 ; Fábio de Almeida Guimarães 2 ;Marcelo Marques Gomes 3 ; Wânderson
A INICIAÇÃO CIENTÍFICA COMO INSTRUMENTO NA FORMAÇÃO DE FUTUROS PESQUISADORES NO INSTITUTO MAUÁ DE TECNOLOGIA Alessandra Dutra Coelho 1 ; Fábio de Almeida Guimarães 2 ;Marcelo Marques Gomes 3 ; Wânderson
Computação Evolutiva. Computação Evolutiva. Principais Tópicos. Evolução natural. Introdução. Evolução natural
 Computação Evolutiva Eduardo do Valle Simões Renato Tinós ICMC - USP Principais Tópicos Introdução Evolução Natural Algoritmos Genéticos Aplicações Conclusão 1 2 Introdução Evolução natural http://www.formula-um.com/
Computação Evolutiva Eduardo do Valle Simões Renato Tinós ICMC - USP Principais Tópicos Introdução Evolução Natural Algoritmos Genéticos Aplicações Conclusão 1 2 Introdução Evolução natural http://www.formula-um.com/
Simulação de Futebol de Robôs
 Departamento de Engenharia Elétrica Simulação de Futebol de Robôs Aluna: Bianca Burgos Maron Orientadora: Marley Vellasco Introdução A inteligência computacional e suas aplicações em robôs inteligentes
Departamento de Engenharia Elétrica Simulação de Futebol de Robôs Aluna: Bianca Burgos Maron Orientadora: Marley Vellasco Introdução A inteligência computacional e suas aplicações em robôs inteligentes
CENTRO UNIVERSITARIO DA FEI PROJETO DE INICIAÇÃO CIENTÍFICA SIMULADOR DE FÍSICA APLICADO AO FUTEBOL DE ROBÔS RELATÓRIO INICIAL
 SIMULADOR DE FÍSICA APLICADO AO FUTEBOL DE ROBÔS RELATÓRIO INICIAL Aluno: André de Oliveira Santos Número FEI: 12.109.144-1 Orientador: Flavio Tonidandel Departamento de Ciência da Computação Inicio: Agosto
SIMULADOR DE FÍSICA APLICADO AO FUTEBOL DE ROBÔS RELATÓRIO INICIAL Aluno: André de Oliveira Santos Número FEI: 12.109.144-1 Orientador: Flavio Tonidandel Departamento de Ciência da Computação Inicio: Agosto
1º Robô Vale ETEP Faculdades
 1º Robô Vale ETEP Faculdades A ETEP Faculdades, seguindo a tradição de desenvolvimento de projetos pelos seus alunos, estará realizando de 21 a 28/11/15 a 1º edição da Robô Vale, com o apoio do Shopping
1º Robô Vale ETEP Faculdades A ETEP Faculdades, seguindo a tradição de desenvolvimento de projetos pelos seus alunos, estará realizando de 21 a 28/11/15 a 1º edição da Robô Vale, com o apoio do Shopping
LEGO Mindstorm e suas aplicações
 Palestrante: Bruno César Prado Email: bu_prado@msn.com Professores: Prof. Maria das Graças Bruno Marietto Prof. Wagner Tanaka Botelho CMCC Centro de Matemática, Computação e Cognição http://www.youtube.com/watch?v=5xva2lfds18
Palestrante: Bruno César Prado Email: bu_prado@msn.com Professores: Prof. Maria das Graças Bruno Marietto Prof. Wagner Tanaka Botelho CMCC Centro de Matemática, Computação e Cognição http://www.youtube.com/watch?v=5xva2lfds18
IDENTIFICAÇÃO E RASTREAMENTO EM TEMPO REAL DE MÚLTIPLOS AGENTES AUTÔNOMOS
 IDENTIFICAÇÃO E RASTREAMENTO EM TEMPO REAL DE MÚLTIPLOS AGENTES AUTÔNOMOS Oliver Matias van Kaick William Robson Schwartz Murilo Vicente Gonçalves da Silva Hélio Pedrini Universidade Federal do Paraná
IDENTIFICAÇÃO E RASTREAMENTO EM TEMPO REAL DE MÚLTIPLOS AGENTES AUTÔNOMOS Oliver Matias van Kaick William Robson Schwartz Murilo Vicente Gonçalves da Silva Hélio Pedrini Universidade Federal do Paraná
UMA METODOLOGIA DE ENSINO DE LOGICA DE PROGRAMACAO COM ROBOTICA EDUCACIONAL
 UMA METODOLOGIA DE ENSINO DE LOGICA DE PROGRAMACAO COM ROBOTICA EDUCACIONAL ANDRADE, Marlo S. 1 ; ASCHOFF, Rafael R. 2 ; OLIVEIRA, Delano H. 3 RODRIGUES, Diego 4 ; 1 Instituto Federal de Educação, Ciência
UMA METODOLOGIA DE ENSINO DE LOGICA DE PROGRAMACAO COM ROBOTICA EDUCACIONAL ANDRADE, Marlo S. 1 ; ASCHOFF, Rafael R. 2 ; OLIVEIRA, Delano H. 3 RODRIGUES, Diego 4 ; 1 Instituto Federal de Educação, Ciência
Propostas de dissertações em Robótica Móvel e Inteligente
 Propostas de dissertações em Robótica Móvel e Inteligente António Neves, Nuno Lau, José Azevedo, Pedro Fonseca, Artur Pereira, Bernardo Cunha,... ({an,nunolau,jla,pf,artur}@ua.pt, mbc@det.ua.pt) Actividade
Propostas de dissertações em Robótica Móvel e Inteligente António Neves, Nuno Lau, José Azevedo, Pedro Fonseca, Artur Pereira, Bernardo Cunha,... ({an,nunolau,jla,pf,artur}@ua.pt, mbc@det.ua.pt) Actividade
Desenvolvimento de um time de futebol robótico para o RoboCup 2D
 Desenvolvimento de um time de futebol robótico para o RoboCup 2D Rodrigo Mendes Garcês 1,Jamesson Amaral Gomes 1, Geraldo Braz Júnior 1, Alexandre César Muniz de Oliveira 1, Luciano Reis Coutinho 1, Paulo
Desenvolvimento de um time de futebol robótico para o RoboCup 2D Rodrigo Mendes Garcês 1,Jamesson Amaral Gomes 1, Geraldo Braz Júnior 1, Alexandre César Muniz de Oliveira 1, Luciano Reis Coutinho 1, Paulo
Viabilizando projetos. Jorge Augusto Lopes Gonçalves
 Viabilizando projetos Jorge Augusto Lopes Gonçalves Eu: Aluno de engenharia de computação - UFG. Entusiasta em vários projetos ligados a área de tecnologia e educação. Participação em torneios de robótica,
Viabilizando projetos Jorge Augusto Lopes Gonçalves Eu: Aluno de engenharia de computação - UFG. Entusiasta em vários projetos ligados a área de tecnologia e educação. Participação em torneios de robótica,
IMPLEMENTAÇÃO DO SIMULADOR SIM PARA FUTEBOL DE ROBÔS
 Universidade Federal de Juiz de Fora Instituto de Ciências Exatas Bacharelado em Ciência da Computação IMPLEMENTAÇÃO DO SIMULADOR SIM PARA FUTEBOL DE ROBÔS Stephanie Martins Pinto da Costa JUIZ DE FORA
Universidade Federal de Juiz de Fora Instituto de Ciências Exatas Bacharelado em Ciência da Computação IMPLEMENTAÇÃO DO SIMULADOR SIM PARA FUTEBOL DE ROBÔS Stephanie Martins Pinto da Costa JUIZ DE FORA
Metodologia de Projeto em Engenharia Elétrica. Estudo de Caso: Projeto de um robô para jogar futebol
 Estudo de Caso: Projeto de um robô para jogar futebol Ewaldo Luiz de Mattos Mehl Universidade Federal do Paraná Departamento de Engenharia Elétrica PROJETO S. m. 1. Idéia que se forma de executar ou realizar
Estudo de Caso: Projeto de um robô para jogar futebol Ewaldo Luiz de Mattos Mehl Universidade Federal do Paraná Departamento de Engenharia Elétrica PROJETO S. m. 1. Idéia que se forma de executar ou realizar
Aprendizagem de Máquina
 Aprendizagem de Máquina Relatório: Rede Neural para tomada de decisão Christian Diego Alves Daniel cdad Icamaan Botelho Viegas da Silva - ibvs Recife, 30 de Julho de 2007. 1. Introdução A Robocup é um
Aprendizagem de Máquina Relatório: Rede Neural para tomada de decisão Christian Diego Alves Daniel cdad Icamaan Botelho Viegas da Silva - ibvs Recife, 30 de Julho de 2007. 1. Introdução A Robocup é um
Futebol Robótico INTRODUÇÃO ROBOCUP 1997 Nagoya (Japão) 1998 Paris (França) 1999 Estocolmo (Suécia) 2000 Melbourne (Austrália) 2001 Seattle (EUA)
 1998 Paris (França) 1999 Estocolmo (Suécia) 2000 Melbourne (Austrália) 2001 Seattle (EUA)") Futebol Robótico INTRODUÇÃO Nos dias que correm, estamos cada vez mais rodeados de tecnologia. Na indústria, com máquinas que já fazem componentes tridimensionais através de deposição de materiais ; em
Futebol Robótico INTRODUÇÃO Nos dias que correm, estamos cada vez mais rodeados de tecnologia. Na indústria, com máquinas que já fazem componentes tridimensionais através de deposição de materiais ; em
Sistema de Reconhecimento de Robôs da categoria Small Size de Futebol de Robôs da FEI RoboFEI
 Projeto de iniciação científica Sistema de Reconhecimento de Robôs da categoria Small Size de Futebol de Robôs da FEI RoboFEI Orientador: Flavio Tonidandel Departamento: Ciência da Computação Candidato:
Projeto de iniciação científica Sistema de Reconhecimento de Robôs da categoria Small Size de Futebol de Robôs da FEI RoboFEI Orientador: Flavio Tonidandel Departamento: Ciência da Computação Candidato:
FUTEBOL UTEBOL ROBÓTICO
 FUTEBOL UTEBOL ROBÓTICO José Almeida Alfredo Martins Laboratório de Sistemas Autónomos Instituto Superior de Engenharia do Porto http://www.lsa.isep.ipp.pt Sumário Motivação Iniciativa robocup Equipas
FUTEBOL UTEBOL ROBÓTICO José Almeida Alfredo Martins Laboratório de Sistemas Autónomos Instituto Superior de Engenharia do Porto http://www.lsa.isep.ipp.pt Sumário Motivação Iniciativa robocup Equipas
PROPOSTA DE ARQUITETURA DE ROBO PARA AMBIENTE DE COMPETIÇÃO
 PROPOSTA DE ARQUITETURA DE ROBO PARA AMBIENTE DE COMPETIÇÃO Winter Carlos Silva Onofre, Danilo Pereira Neves, Guilherme Henrique Guerra, Renato Ferreira Fernandes Júnior, Aniel Silva de Morais wintercarlos@hotmail.com,
PROPOSTA DE ARQUITETURA DE ROBO PARA AMBIENTE DE COMPETIÇÃO Winter Carlos Silva Onofre, Danilo Pereira Neves, Guilherme Henrique Guerra, Renato Ferreira Fernandes Júnior, Aniel Silva de Morais wintercarlos@hotmail.com,
SEMANA DE TECNOLOGIA ENIAC REGRAS DA COMPETIÇÃO
 SEMANA DE TECNOLOGIA ENIAC REGRAS DA COMPETIÇÃO FUTEBOL DE ROBÔS 1. Descrição e Objetivos Os estudantes matriculados na skill serão solicitados a se organizar em equipes, sendo que cada equipe apresentará
SEMANA DE TECNOLOGIA ENIAC REGRAS DA COMPETIÇÃO FUTEBOL DE ROBÔS 1. Descrição e Objetivos Os estudantes matriculados na skill serão solicitados a se organizar em equipes, sendo que cada equipe apresentará
DESENVOLVIMENTO DE ROBÔ MÓVEL RADIOCONTROLADO
 Anais do 13 O Encontro de Iniciação Científica e Pós-Graduação do ITA XIII ENCITA / 2007 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 01 a 04 2007. DESENVOLVIMENTO DE ROBÔ
Anais do 13 O Encontro de Iniciação Científica e Pós-Graduação do ITA XIII ENCITA / 2007 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 01 a 04 2007. DESENVOLVIMENTO DE ROBÔ
GarrinchaBot: Uma proposta de robô para Robocup Small size League
 Anais do 15 O Encontro de Iniciação Científica e Pós-Graduação do ITA XV ENCITA / 2009 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 19 a 22 2009. GarrinchaBot: Uma proposta
Anais do 15 O Encontro de Iniciação Científica e Pós-Graduação do ITA XV ENCITA / 2009 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 19 a 22 2009. GarrinchaBot: Uma proposta
SISTEMA DE VISÃO COMPUTACIONAL DO TIME DE FUTEBOL DE ROBÔS DO INSTITUTO FEDERAL DO SUL DE MINAS CÂMPUS MUZAMBINHO
 SISTEMA DE VISÃO COMPUTACIONAL DO TIME DE FUTEBOL DE ROBÔS DO INSTITUTO FEDERAL DO SUL DE MINAS CÂMPUS MUZAMBINHO 1 Leonardo de S. VIEIRA 2 ; Heber R. MOREIRA 3 ; João M. RIBEIRO RESUMO O desenvolvimento
SISTEMA DE VISÃO COMPUTACIONAL DO TIME DE FUTEBOL DE ROBÔS DO INSTITUTO FEDERAL DO SUL DE MINAS CÂMPUS MUZAMBINHO 1 Leonardo de S. VIEIRA 2 ; Heber R. MOREIRA 3 ; João M. RIBEIRO RESUMO O desenvolvimento
Dênis Schneider Strassmann DESENVOLVIMENTO DE UMA ARQUITETURA BASEADA EM SUBSUNÇÃO PARA UM TIME DE FUTEBOL DE ROBÔS
 Dênis Schneider Strassmann DESENVOLVIMENTO DE UMA ARQUITETURA BASEADA EM SUBSUNÇÃO PARA UM TIME DE FUTEBOL DE ROBÔS Florianópolis - SC Agosto de 2006 Dênis Schneider Strassmann DESENVOLVIMENTO DE UMA
Dênis Schneider Strassmann DESENVOLVIMENTO DE UMA ARQUITETURA BASEADA EM SUBSUNÇÃO PARA UM TIME DE FUTEBOL DE ROBÔS Florianópolis - SC Agosto de 2006 Dênis Schneider Strassmann DESENVOLVIMENTO DE UMA
ARQUITETURA HIERÁRQUICA DISTRIBUÍDA PARA COORDENAÇÃO E COOPERAÇÃO DE SISTEMAS MULTI-ROBÔS
 ARQUITETURA HIERÁRQUICA DISTRIBUÍDA PARA COORDENAÇÃO E COOPERAÇÃO DE SISTEMAS MULTI-ROBÔS André G. S. Conceição, Tiago T. Ribeiro, A. Paulo Moreira, Paulo J. Costa Departamento de Engenharia Elétrica Universidade
ARQUITETURA HIERÁRQUICA DISTRIBUÍDA PARA COORDENAÇÃO E COOPERAÇÃO DE SISTEMAS MULTI-ROBÔS André G. S. Conceição, Tiago T. Ribeiro, A. Paulo Moreira, Paulo J. Costa Departamento de Engenharia Elétrica Universidade
UAISOCCER2D - TEAM DESCRIPTION PAPER CBR 2013
 UAISOCCER2D - TEAM DESCRIPTION PAPER CBR 2013 André Luiz Carvalho Ottoni, Erivelton Geraldo Nepomuceno, Marcos Santos de Oliveira, Rubisson Duarte Lamperti, Eduardo Bento Pereira, Emerson Santos Silva,
UAISOCCER2D - TEAM DESCRIPTION PAPER CBR 2013 André Luiz Carvalho Ottoni, Erivelton Geraldo Nepomuceno, Marcos Santos de Oliveira, Rubisson Duarte Lamperti, Eduardo Bento Pereira, Emerson Santos Silva,
2010 Modalidade: Teórica Nível 4 (8º e 9º anos ensino fundamental) Duração: 2 horas Nome do Aluno:... Matr:... Escola:... Cidade:... Estado:...
 Duração: 2 horas Nome do Aluno:... Matr:... Escola:... Cidade:... Estado:...") 2010 Modalidade: Teórica Nível 4 (8º e 9º anos ensino fundamental) Duração: 2 horas Nome do Aluno:... Matr:... Escola:... Cidade:... Estado:... Realização: Patrocinio: Apoio: Caro(a) Professor(a): Aviso
2010 Modalidade: Teórica Nível 4 (8º e 9º anos ensino fundamental) Duração: 2 horas Nome do Aluno:... Matr:... Escola:... Cidade:... Estado:... Realização: Patrocinio: Apoio: Caro(a) Professor(a): Aviso
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Frederico Miguel Santos
 Frederico Miguel Santos DEE ISEC DETI/IEETA - UA Sumário 1. RoboCup 1. descrição / objectivos 2. MSL - futebol,,porquê? 2. CAMBADA 1. descrição / objectivos 2. evolução 3. hardware 4. software: coordenação
Frederico Miguel Santos DEE ISEC DETI/IEETA - UA Sumário 1. RoboCup 1. descrição / objectivos 2. MSL - futebol,,porquê? 2. CAMBADA 1. descrição / objectivos 2. evolução 3. hardware 4. software: coordenação
Quem somos? História. Mais informações acessem:
 Quem somos? História A equipe de Robótica Asimov é uma equipe brasileira de robótica educacional formada por estudantes do Instituto Federal do Espírito Santo Ifes Campus Colatina. Ela foi fundada no inicio
Quem somos? História A equipe de Robótica Asimov é uma equipe brasileira de robótica educacional formada por estudantes do Instituto Federal do Espírito Santo Ifes Campus Colatina. Ela foi fundada no inicio
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Time de Futebol de Robôs Y04 do Centro Universitário da FEI
 Time de Futebol de Robôs Y04 do Centro Universitário da FEI Eder A. Penharbel, Murilo F. Martins, Alexandre Fazolin, José Angelo Gurzoni Jr, Helbert Eduardo, Thiago Debia, Valquiria F. Pereira, Ricardo
Time de Futebol de Robôs Y04 do Centro Universitário da FEI Eder A. Penharbel, Murilo F. Martins, Alexandre Fazolin, José Angelo Gurzoni Jr, Helbert Eduardo, Thiago Debia, Valquiria F. Pereira, Ricardo
Distributed control architecture, Image processing, Robotic soccer.
 ARTIGO DE DESCRIÇÃO DA ESTRATÉGIA DA EQUIPE UFSC-TEAM NA LIGA SMALL-SIZE (F-180) DA ROBOCUP Claudio J. Biazus Dênis S. Strassmann Mauro Roisenberg Guilherme Bittencourt Lucas C. Neves Gustavo U. Comerlatto
ARTIGO DE DESCRIÇÃO DA ESTRATÉGIA DA EQUIPE UFSC-TEAM NA LIGA SMALL-SIZE (F-180) DA ROBOCUP Claudio J. Biazus Dênis S. Strassmann Mauro Roisenberg Guilherme Bittencourt Lucas C. Neves Gustavo U. Comerlatto
POSITRONICS SOCCER: CONSTRUÇÃO E DESENVOLVIMENTO DE ROBÔS DE FUTEBOL UTILIZANDO O NXT MINDSTORMS
 POSITRONICS SOCCER: CONSTRUÇÃO E DESENVOLVIMENTO DE ROBÔS DE FUTEBOL UTILIZANDO O NXT MINDSTORMS MENDONÇA, Hugo Serrano Leite de 1 ; CAMPOS, Victor de Oliveira 1 ; COUTINHO, Yuri Batista Almeida 2 ; PONTES,
POSITRONICS SOCCER: CONSTRUÇÃO E DESENVOLVIMENTO DE ROBÔS DE FUTEBOL UTILIZANDO O NXT MINDSTORMS MENDONÇA, Hugo Serrano Leite de 1 ; CAMPOS, Victor de Oliveira 1 ; COUTINHO, Yuri Batista Almeida 2 ; PONTES,
Inteligência Artificial
 Inteligência Artificial Professor Rafael Stubs Parpinelli E-mail: rafael.parpinelli@udesc.br udesc.academia.edu/rafaelstubsparpinelli www.researchgate.net/profile/rafael_parpinelli www.joinville.udesc.br/portal/professores/parpinelli/
Inteligência Artificial Professor Rafael Stubs Parpinelli E-mail: rafael.parpinelli@udesc.br udesc.academia.edu/rafaelstubsparpinelli www.researchgate.net/profile/rafael_parpinelli www.joinville.udesc.br/portal/professores/parpinelli/
Construção de Robôs Jogadores de Futebol
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Construção de Robôs Jogadores de Futebol Wânderson O. Assis, Alessandra D. Coelho, Marcelo
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Construção de Robôs Jogadores de Futebol Wânderson O. Assis, Alessandra D. Coelho, Marcelo
VISÃO DIGITAL, OS OLHOS DO FUTURO
 VISÃO DIGITAL, OS OLHOS DO FUTURO Eduardo Marcelo Nicastro Carvalho*, Luana Fonseca Guimarães*, Priscila Amâncio da Silva*, Maurício Neves Asenjo** * Acadêmicos da Faculdade de Ciências e de Tecnologia
VISÃO DIGITAL, OS OLHOS DO FUTURO Eduardo Marcelo Nicastro Carvalho*, Luana Fonseca Guimarães*, Priscila Amâncio da Silva*, Maurício Neves Asenjo** * Acadêmicos da Faculdade de Ciências e de Tecnologia
Mais informação disponível em: Entrada gratuita, entre as 10:00 e as 23:00. Estão em competição as seguintes ligas:
 O Robótica 2012 - Festival Nacional de Robótica, decorre de 12 a 15 de Abril, no Multiusos de Guimarães. Trata-se de um evento anual, organizado pela Universidade do Minho e pela SAR Soluções de Automação
O Robótica 2012 - Festival Nacional de Robótica, decorre de 12 a 15 de Abril, no Multiusos de Guimarães. Trata-se de um evento anual, organizado pela Universidade do Minho e pela SAR Soluções de Automação
2010 Modalidade: Teórica Nível 4 (8º e 9º anos ensino fundamental) Duração: 2 horas Nome do Aluno:... Gabarito Matr:...
 Duração: 2 horas Nome do Aluno:... Gabarito Matr:...") 2010 Modalidade: Teórica Nível 4 (8º e 9º anos ensino fundamental) Duração: 2 horas Nome do Aluno:... Gabarito Matr:... 00000000 Escola:... Nome da escola Cidade:... Minha cidade Estado:... Meu estado
2010 Modalidade: Teórica Nível 4 (8º e 9º anos ensino fundamental) Duração: 2 horas Nome do Aluno:... Gabarito Matr:... 00000000 Escola:... Nome da escola Cidade:... Minha cidade Estado:... Meu estado
Placa Eletrônica para Robôs Móveis
 Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
IDENTIFICAÇÃO E RASTREAMENTO EM TEMPO REAL DE MÚLTIPLOS AGENTES AUTÔNOMOS
 IDENTIFICAÇÃO E RASTREAMENTO EM TEMPO REAL DE MÚLTIPLOS AGENTES AUTÔNOMOS Oliver Matias van Kaick William Robson Schwartz Murilo Vicente Gonçalves da Silva Hélio Pedrini Universidade Federal do Paraná
IDENTIFICAÇÃO E RASTREAMENTO EM TEMPO REAL DE MÚLTIPLOS AGENTES AUTÔNOMOS Oliver Matias van Kaick William Robson Schwartz Murilo Vicente Gonçalves da Silva Hélio Pedrini Universidade Federal do Paraná
Activities IEEE Latin America Robotics Committee
 Activities 2008 IEEE Latin America Robotics Committee During the month of October, 2008, the following events were realized, patrocined by IEEE R9 Robotics Sub-Committee and by Latin America Robocup Committee,
Activities 2008 IEEE Latin America Robotics Committee During the month of October, 2008, the following events were realized, patrocined by IEEE R9 Robotics Sub-Committee and by Latin America Robocup Committee,
Uma Estratégia para Seleção de Agentes Heterogênos para o Futebol de Robôs Simulado
 Uma Estratégia para Seleção de Agentes Heterogênos para o Futebol de Robôs Simulado Luciana Silva 1, Marco A. C. Simões 2 1 Centro Universitário da Bahia (FIB) Salvador BA Brasil 2 Núcleo de Arquitetura
Uma Estratégia para Seleção de Agentes Heterogênos para o Futebol de Robôs Simulado Luciana Silva 1, Marco A. C. Simões 2 1 Centro Universitário da Bahia (FIB) Salvador BA Brasil 2 Núcleo de Arquitetura
IV Torneio Treta Futebol Society TRETA CHAMPIONS LEAGUE 2016
 IV Torneio Treta Futebol Society TRETA CHAMPIONS LEAGUE 2016 Datas e horários: Inicio em 01/10/2016 até 26/11/2016 Horário das 15h00min às 17h30min Sobre o número de atletas por equipe: Inscrições de no
IV Torneio Treta Futebol Society TRETA CHAMPIONS LEAGUE 2016 Datas e horários: Inicio em 01/10/2016 até 26/11/2016 Horário das 15h00min às 17h30min Sobre o número de atletas por equipe: Inscrições de no
SETOR DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA DISCIPLINA TE-200 ENGENHARIA ELÉTRICA E SOCIEDADE I ANO LETIVO DE 2010 DESAFIO TECNOLÓGICO
 SETOR DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA DISCIPLINA TE-200 ENGENHARIA ELÉTRICA E SOCIEDADE I ANO LETIVO DE 2010 DESAFIO TECNOLÓGICO 1. Descrição e Objetivos Este documento especifica as
SETOR DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA DISCIPLINA TE-200 ENGENHARIA ELÉTRICA E SOCIEDADE I ANO LETIVO DE 2010 DESAFIO TECNOLÓGICO 1. Descrição e Objetivos Este documento especifica as
REGULAMENTO VI COPA LOC GAMES DE FUTEBOL DIGITAL
 1. AGRADECIMENTOS REGULAMENTO VI COPA LOC GAMES DE FUTEBOL DIGITAL Sem parceria e muita dedicação de pessoas e empresas envolvidas, esse projeto não seria possível, por isso, nossos sinceros agradecimentos
1. AGRADECIMENTOS REGULAMENTO VI COPA LOC GAMES DE FUTEBOL DIGITAL Sem parceria e muita dedicação de pessoas e empresas envolvidas, esse projeto não seria possível, por isso, nossos sinceros agradecimentos
Programação Robótica e Visão por Computador Trabalhos Práticos. Trabalhos Práticos
 Trabalhos Práticos Programação Robótica e Visão por Computador Curso: Engª Informática 5ª ano Ramo Computadores e Sistemas 1. Objectivos 2. Calendarização 3. Normas 3.1 Relatório 3.1 Apresentação 4. Propostas
Trabalhos Práticos Programação Robótica e Visão por Computador Curso: Engª Informática 5ª ano Ramo Computadores e Sistemas 1. Objectivos 2. Calendarização 3. Normas 3.1 Relatório 3.1 Apresentação 4. Propostas
ALUNO (A): Nº. 2- Quantos jogadores de handebol ficam na reserva? A. 5jogadores. B. 6jogadores. C. 7jogadores. D. 8jogadores. E. 9jogadores.
: Nº. 2- Quantos jogadores de handebol ficam na reserva? A. 5jogadores. B. 6jogadores. C. 7jogadores. D. 8jogadores. E. 9jogadores.") SECRETARIA DE SEGURANÇA PÚBLICA/SECRETARIA DE EDUCAÇÃO POLÍCIA MILITAR DO ESTADO DE GOIÁS COMANDO DE ENSINO POLICIAL MILITAR COLÉGIO DA POLÍCIA MILITAR NADER ALVES DOS SANTOS SÉRIE/ANO: 6º A, B, C DISCIPLINA:
SECRETARIA DE SEGURANÇA PÚBLICA/SECRETARIA DE EDUCAÇÃO POLÍCIA MILITAR DO ESTADO DE GOIÁS COMANDO DE ENSINO POLICIAL MILITAR COLÉGIO DA POLÍCIA MILITAR NADER ALVES DOS SANTOS SÉRIE/ANO: 6º A, B, C DISCIPLINA:
Nome Candidato: Matrícula
 Processo Seletivo 2010 Admissão de Novos Integrantes Função: Estagiários Equipe UaiSoccer Universidade Federal de São João Del-Rei Nome Candidato: Matrícula Atenção: Esta Prova terá duração máxima de 1
Processo Seletivo 2010 Admissão de Novos Integrantes Função: Estagiários Equipe UaiSoccer Universidade Federal de São João Del-Rei Nome Candidato: Matrícula Atenção: Esta Prova terá duração máxima de 1
Projeto de Robô para modalidade RoboCup Dance, LARC 2015
 Projeto de Robô para modalidade RoboCup Dance, LARC 2015 Alef Amaral de Figueiredo, Alexandre da Costa Guarilha, Leonardo de Lima Henning, Leone Serpa da Cruz, Manuela Carvalho, Paula Cristina Oliveira
Projeto de Robô para modalidade RoboCup Dance, LARC 2015 Alef Amaral de Figueiredo, Alexandre da Costa Guarilha, Leonardo de Lima Henning, Leone Serpa da Cruz, Manuela Carvalho, Paula Cristina Oliveira
Metodologia de Projeto em Engenharia Elétrica. Estudo de Caso: Projeto de um robô para jogar futebol
 Estudo de Caso: Projeto de um robô para jogar futebol Ewaldo Luiz de Mattos Mehl Universidade Federal do Paraná Departamento de Engenharia Elétrica mehl@ufpr.br PROJETO S. m. 1. Idéia que se forma de construir,
Estudo de Caso: Projeto de um robô para jogar futebol Ewaldo Luiz de Mattos Mehl Universidade Federal do Paraná Departamento de Engenharia Elétrica mehl@ufpr.br PROJETO S. m. 1. Idéia que se forma de construir,
1ª Copa Contabilizar na Rede de Futebol Society - 2012
 1ª1ª Copopa Conontababililizar na Rede de Futetebobol Societyety - 2012012 1ª Copa Contabilizar na Rede de Futebol Society - 2012 Esta Copa tem como o principal objetivo a melhor integração e confraternização
1ª1ª Copopa Conontababililizar na Rede de Futetebobol Societyety - 2012012 1ª Copa Contabilizar na Rede de Futebol Society - 2012 Esta Copa tem como o principal objetivo a melhor integração e confraternização
A Real-Time Framework for the Vision Subsystem in Autonomous Mobile Robots
 Sistemas de Tempo Real 2009/2010 Universidade de Aveiro A Real-Time Framework for the Vision Subsystem in Autonomous Mobile Robots Fábio Amado 33637 fmna@ua.pt João Maio 33306 jpsmaio@ua.pt Índice 1. Introdução
Sistemas de Tempo Real 2009/2010 Universidade de Aveiro A Real-Time Framework for the Vision Subsystem in Autonomous Mobile Robots Fábio Amado 33637 fmna@ua.pt João Maio 33306 jpsmaio@ua.pt Índice 1. Introdução
ELO KING. COACHING & DUO COACH Desperte seu lado Pro Player
 ELO KING & DUO COACH Desperte seu lado Pro Player ELO KING QUEM SOMOS? O Elo King é uma das empresas mais consolidadas no mercado de Boosting e Coaching de LoL do Brasil, formada pelos melhores jogadores
ELO KING & DUO COACH Desperte seu lado Pro Player ELO KING QUEM SOMOS? O Elo King é uma das empresas mais consolidadas no mercado de Boosting e Coaching de LoL do Brasil, formada pelos melhores jogadores
RobotBulls Robotics Team Description 2015 (2D)
") RobotBulls Robotics Team Description 2015 (2D) Alexandre Baratella Lugli, Haroldo Manoel Dornelas, Leonardo de Oliveira Saldanha e Wanderson Eleutério Saldanha. Av. João de Camargo, 510, Santa Rita do
RobotBulls Robotics Team Description 2015 (2D) Alexandre Baratella Lugli, Haroldo Manoel Dornelas, Leonardo de Oliveira Saldanha e Wanderson Eleutério Saldanha. Av. João de Camargo, 510, Santa Rita do
A Versão 2007 da equipe POTI de Futebol de Robôs
 A Versão 2007 da equipe POTI de Futebol de Robôs Daniel L. Martins 1, Ellon P. Mendes 1, Filipe C. A. Lins 1, Márcio V. de Araújo 1 Adelardo A. D. Medeiros 1, Pablo J. Alsina 1 1 Universidade Federal do
A Versão 2007 da equipe POTI de Futebol de Robôs Daniel L. Martins 1, Ellon P. Mendes 1, Filipe C. A. Lins 1, Márcio V. de Araújo 1 Adelardo A. D. Medeiros 1, Pablo J. Alsina 1 1 Universidade Federal do
10. Conclusões e Perspectivas de Desenvolvimento
 Capítulo 10 10. Conclusões e Perspectivas de Desenvolvimento 10.1 Síntese do Trabalho Desenvolvido O objectivo geral deste trabalho foi o estudo e desenvolvimento de metodologias de coordenação em sistemas
Capítulo 10 10. Conclusões e Perspectivas de Desenvolvimento 10.1 Síntese do Trabalho Desenvolvido O objectivo geral deste trabalho foi o estudo e desenvolvimento de metodologias de coordenação em sistemas
Copa do Mundo de Futebol: desempenho dos países sedes, 1930 a 2010
 Copa do Mundo de Futebol: desempenho dos países sedes, 1930 a 2010 La Copa del Mundo de Fútbol: rendimiento de los países sedes, 1930 a 2010 Soccer World Cup: performance of the home countries, 1930 to
Copa do Mundo de Futebol: desempenho dos países sedes, 1930 a 2010 La Copa del Mundo de Fútbol: rendimiento de los países sedes, 1930 a 2010 Soccer World Cup: performance of the home countries, 1930 to
ROBOK VERY SMALL SIZE TDP
 ROBOK VERY SMALL SIZE TDP Pedro Senna de Campos, Luiz Ricardo Veloso Antunes, Thiago Souza de Oliveira, Vanessa Ayumi Maegima, Luís Paulo Manfré Ribeiro, Iago Benjamin Daniel Santana, Caio Pinheiro Santana,
ROBOK VERY SMALL SIZE TDP Pedro Senna de Campos, Luiz Ricardo Veloso Antunes, Thiago Souza de Oliveira, Vanessa Ayumi Maegima, Luís Paulo Manfré Ribeiro, Iago Benjamin Daniel Santana, Caio Pinheiro Santana,
A pesquisa no ensino de computação. Práticas de ensino de algoritmos (Hazzan, Cap. 4) Péricles Miranda
 Péricles Miranda") A pesquisa no ensino de computação Práticas de ensino de algoritmos (Hazzan, Cap. 4) Péricles Miranda Existe pesquisa na área de ensino? Existe uma variedade de tópicos Conhecimento de novatos Investiga
A pesquisa no ensino de computação Práticas de ensino de algoritmos (Hazzan, Cap. 4) Péricles Miranda Existe pesquisa na área de ensino? Existe uma variedade de tópicos Conhecimento de novatos Investiga
Cada jogador possui a visão do jogo, conforme ilustrado na Figura 3, que pode ser alterada e programada pelo desenvolvedor.
 Robotbulls Robotics Descrição da Equipe 2014* Alexandre Baratella Lugli. Av. João de Camargo, 510, Santa Rita do Sapucaí/MG. National Telecommunication Institute - INATEL, Department Industrial Automation
Robotbulls Robotics Descrição da Equipe 2014* Alexandre Baratella Lugli. Av. João de Camargo, 510, Santa Rita do Sapucaí/MG. National Telecommunication Institute - INATEL, Department Industrial Automation
Torneio de inauguração das quadras externas do Departamento de Esportes e Lazer (DEL).
.") Torneio de inauguração das quadras externas do Departamento de Esportes e Lazer (DEL). Modalidade: Futsal masculino e feminino (para alunos de todos os cursos de graduação, pós graduação e servidores).
Torneio de inauguração das quadras externas do Departamento de Esportes e Lazer (DEL). Modalidade: Futsal masculino e feminino (para alunos de todos os cursos de graduação, pós graduação e servidores).
Colégio Adventista de Rio Preto. Futsal. 9º ano. Prof. Daniel Prandi. Prof. Sheila Molina
 Colégio Adventista de Rio Preto Futsal 9º ano Prof. Daniel Prandi Prof. Sheila Molina FUTEBOL DE SALÃO - FUTSAL Caracterização: É um jogo coletivo desportivo, entre duas equipes, sendo cada uma constituída
Colégio Adventista de Rio Preto Futsal 9º ano Prof. Daniel Prandi Prof. Sheila Molina FUTEBOL DE SALÃO - FUTSAL Caracterização: É um jogo coletivo desportivo, entre duas equipes, sendo cada uma constituída
Campeonato de Futebol Simulado de Robôs
 Campeonato de Futebol Simulado de Robôs 1. Regras O campeonato de futebol simulado de robôs será disputado com o auxílio de um programa simulador que emula o comportamento de duas equipes de três mini-robôs
Campeonato de Futebol Simulado de Robôs 1. Regras O campeonato de futebol simulado de robôs será disputado com o auxílio de um programa simulador que emula o comportamento de duas equipes de três mini-robôs
Framework para o Desenvolvimento de Agentes para a Robocup: o Módulo de Definição de Áreas de Atuação
 Framework para o Desenvolvimento de para a Robocup: o Módulo de Definição de Áreas de Atuação Andre Zanki Cordenonsi, Alisson Moscato Loy, Guilherme Dhein, Leone Francisco Petry Cesca Centro Universitário
Framework para o Desenvolvimento de para a Robocup: o Módulo de Definição de Áreas de Atuação Andre Zanki Cordenonsi, Alisson Moscato Loy, Guilherme Dhein, Leone Francisco Petry Cesca Centro Universitário
IFAS3D: Uma Interface para o Simulador de Jogos de Futebol com Robôs Humanoides em 3D
 IFAS3D: Uma Interface para o Simulador de Jogos de Futebol com Robôs Humanoides em 3D Adailton de J. Cerqueira Jr., Diego G. Frías Suárez, Marco A. C. Simões, Josemar R. Souza 1 Núcleo de Arquitetura de
IFAS3D: Uma Interface para o Simulador de Jogos de Futebol com Robôs Humanoides em 3D Adailton de J. Cerqueira Jr., Diego G. Frías Suárez, Marco A. C. Simões, Josemar R. Souza 1 Núcleo de Arquitetura de
Concursos Micro-Rato. Ciber-Rato
 Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação
Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação
UNIVERSIDADE DE CAXIAS DO SUL CENTRO DE CIÊNCIAS EXATAS E DA TECNOLOGIA BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO GUILHERME FABRIS DE SOUZA
 UNIVERSIDADE DE CAXIAS DO SUL CENTRO DE CIÊNCIAS EXATAS E DA TECNOLOGIA BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO GUILHERME FABRIS DE SOUZA SISTEMA MULTIAGENTES DE SIMULAÇÃO DE FUTEBOL DE ROBÔS:
UNIVERSIDADE DE CAXIAS DO SUL CENTRO DE CIÊNCIAS EXATAS E DA TECNOLOGIA BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO GUILHERME FABRIS DE SOUZA SISTEMA MULTIAGENTES DE SIMULAÇÃO DE FUTEBOL DE ROBÔS:
O SIMULADOR DE ROBÔS V-REP NO ENSINO DAS TÉCNICAS DE CONTROLE DE ROBÔS AUTÔNOMOS
 O SIMULADOR DE ROBÔS V-REP NO ENSINO DAS TÉCNICAS DE CONTROLE DE ROBÔS AUTÔNOMOS Ricardo Kerschbaumer ricardo@luzerna.ifc.edu.br IFC - Instituto Federal de Educação Ciência e Tecnologia Catarinense Rua
O SIMULADOR DE ROBÔS V-REP NO ENSINO DAS TÉCNICAS DE CONTROLE DE ROBÔS AUTÔNOMOS Ricardo Kerschbaumer ricardo@luzerna.ifc.edu.br IFC - Instituto Federal de Educação Ciência e Tecnologia Catarinense Rua
ÍCARO DOS SANTOS SIMULAÇÃO DE MOVIMENTO DE ROBÔS NUM AMBIENTE COOPERATIVO DE FUTEBOL. Orientadora: Fabiana R. Leta. Dissertação apresentada ao
 ÍCARO DOS SANTOS FRANÇA SIMULAÇÃO DE MOVIMENTO DE ROBÔS NUM AMBIENTE COOPERATIVO DE FUTEBOL Dissertação apresentada ao Departamento de Engenharia Mecânica da UFF como parte dos requisitos para a obtenção
ÍCARO DOS SANTOS FRANÇA SIMULAÇÃO DE MOVIMENTO DE ROBÔS NUM AMBIENTE COOPERATIVO DE FUTEBOL Dissertação apresentada ao Departamento de Engenharia Mecânica da UFF como parte dos requisitos para a obtenção
Agentes. O que é um Agente. Agentes Inteligentes. Inteligência Artificial I. Tópicos. Introdução a Agentes. Introdução a Agentes
 Universidade Federal de Campina Grande Departamento de Sistemas e Computação Curso de Bacharelado em Ciência da Computação Agentes Inteligência Artificial I Tópicos Fonte: José Francisco Salm Junior (Diretor
Universidade Federal de Campina Grande Departamento de Sistemas e Computação Curso de Bacharelado em Ciência da Computação Agentes Inteligência Artificial I Tópicos Fonte: José Francisco Salm Junior (Diretor
VI CAMPEONATO DE FUTEBOL SOCIETY 2015
 VI CAMPEONATO DE FUTEBOL SOCIETY 2015 Súmula: Cubanos 2 x 2 Liga da Justiça Data: 12 de setembro de 2015 Árbitro: Waldir Gonçalves Gols: Luzinaldo Oliveira aos 10 (Cubanos) do primeiro tempo; Valdemir
VI CAMPEONATO DE FUTEBOL SOCIETY 2015 Súmula: Cubanos 2 x 2 Liga da Justiça Data: 12 de setembro de 2015 Árbitro: Waldir Gonçalves Gols: Luzinaldo Oliveira aos 10 (Cubanos) do primeiro tempo; Valdemir
DESVIO DE OBSTÁCULOS PARA MICRO ROBÔS MÓVEIS UTILIZANDO CAMPO POTENCIAL
 DESVIO DE OBSTÁCULOS PARA MICRO ROBÔS MÓVEIS UTILIZANDO CAMPO POTENCIAL Marcelo Rosenthal de Souza Gomes and Mário Fernando Montenegro Campos VERLab Laboratório de Visão Computacional e Robótica Departamento
DESVIO DE OBSTÁCULOS PARA MICRO ROBÔS MÓVEIS UTILIZANDO CAMPO POTENCIAL Marcelo Rosenthal de Souza Gomes and Mário Fernando Montenegro Campos VERLab Laboratório de Visão Computacional e Robótica Departamento
APLICAÇÃO DE UM MODELO MATEMÁTICA EM UMA EQUIPE DE FUTEBOL DE ROBÔS
 ISSN 175-695 Rio de Janeiro- Brasil, 07 e 08 de novembro de 007. SPOLM007 APLICAÇÃO DE UM MODELO MATEMÁTICA EM UMA EQUIPE DE FUTEBOL DE ROBÔS Marco Antonio Firmino de Sousa Instituto Militar de Engenharia
ISSN 175-695 Rio de Janeiro- Brasil, 07 e 08 de novembro de 007. SPOLM007 APLICAÇÃO DE UM MODELO MATEMÁTICA EM UMA EQUIPE DE FUTEBOL DE ROBÔS Marco Antonio Firmino de Sousa Instituto Militar de Engenharia
Desenvolvimento de uma arquitetura embarcada reativa para agentes autônomos inteligentes, aplicada ao futebol de robôs
 DOI: 10.4025/actascitechnol.v31i2.371 Desenvolvimento de uma arquitetura embarcada reativa para agentes autônomos inteligentes, aplicada ao futebol de robôs Claudio Jose Biazus * e Mauro Roisenberg Universidade
DOI: 10.4025/actascitechnol.v31i2.371 Desenvolvimento de uma arquitetura embarcada reativa para agentes autônomos inteligentes, aplicada ao futebol de robôs Claudio Jose Biazus * e Mauro Roisenberg Universidade
Inteligência Artificial
 Fonte: José Francisco Salm Junior (Diretor de Engenharia de Sistemas Instituto Stela) Universidade Federal de Campina Grande Departamento de Sistemas e Computação Curso de Pós-Graduação em Ciência da Computação
Fonte: José Francisco Salm Junior (Diretor de Engenharia de Sistemas Instituto Stela) Universidade Federal de Campina Grande Departamento de Sistemas e Computação Curso de Pós-Graduação em Ciência da Computação
Equipe FEI-06 de Futebol de Robôs
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Equipe FEI-06 de Futebol de Robôs Murilo Fernandes Martins, Ronaldo Kazuyoshi Satomi,
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Equipe FEI-06 de Futebol de Robôs Murilo Fernandes Martins, Ronaldo Kazuyoshi Satomi,
Primeiro Estudo COPA 2010 FIFA EFETIVIDADE NO FUTEBOL. Grupo Ciência no Futebol DEF UFRN
 Primeiro Estudo COPA 2010 FIFA EFETIVIDADE NO FUTEBOL Grupo Ciência no Futebol DEF UFRN Autores Jeferson Tafarel Pereira do Rêgo Nickson Barbosa Marinho Péricles Roberto Silva Rodrigues Orientador: João
Primeiro Estudo COPA 2010 FIFA EFETIVIDADE NO FUTEBOL Grupo Ciência no Futebol DEF UFRN Autores Jeferson Tafarel Pereira do Rêgo Nickson Barbosa Marinho Péricles Roberto Silva Rodrigues Orientador: João
Temas de Doutoramento em Simulação, Agentes, Robótica e Inteligência Artificial
 Faculdade de Engenharia da Universidade do Porto Departamento de Engenharia Informática Temas de Doutoramento em Simulação, Agentes, Robótica e Inteligência Artificial Luís s Paulo Reis http://www.fe.up.pt/~lpreis
Faculdade de Engenharia da Universidade do Porto Departamento de Engenharia Informática Temas de Doutoramento em Simulação, Agentes, Robótica e Inteligência Artificial Luís s Paulo Reis http://www.fe.up.pt/~lpreis
ESTRATÉGIAS DE NAVEGAÇÃO COOPERATIVA APLICADAS AO FUTEBOL DE ROBÔS AUTÔNOMOS DA EQUIPE BDP/UFV
 ESTRATÉGIAS DE NAVEGAÇÃO COOPERATIVA APLICADAS AO FUTEBOL DE ROBÔS AUTÔNOMOS DA EQUIPE BDP/UFV Alexandre Santos Brandão alexandre.brandao@ufv.br Rafael Rosado Cruz rafael.cruz@ufv.br Talles Barbosa Portilho
ESTRATÉGIAS DE NAVEGAÇÃO COOPERATIVA APLICADAS AO FUTEBOL DE ROBÔS AUTÔNOMOS DA EQUIPE BDP/UFV Alexandre Santos Brandão alexandre.brandao@ufv.br Rafael Rosado Cruz rafael.cruz@ufv.br Talles Barbosa Portilho
Multi-Layered Control Applied to Autonomous Robot Soccer
 Multi-Layered Control Applied to Autonomous Robot Soccer Controle Multi-Nível Aplicado a Futebol de Robôs Autônomos Ivan O. Nunes, Thaylo X. Freitas, Igor O. Nunes, Marcos V. C. Couto, Jackson W. Brito,
Multi-Layered Control Applied to Autonomous Robot Soccer Controle Multi-Nível Aplicado a Futebol de Robôs Autônomos Ivan O. Nunes, Thaylo X. Freitas, Igor O. Nunes, Marcos V. C. Couto, Jackson W. Brito,
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 01 - Introdução Edirlei Soares de Lima O que é Inteligência Artificial? O que é Inteligência Artificial? Área de pesquisa que tem como objetivo
INF 1771 Inteligência Artificial Aula 01 - Introdução Edirlei Soares de Lima O que é Inteligência Artificial? O que é Inteligência Artificial? Área de pesquisa que tem como objetivo
PROJETO DO TIME DE FUTEBOL DE ROBÔS IFRN IEEE VERY SMALL SIZE. Robot Soccer Very Small Size
 PROJETO DO TIME DE FUTEBOL DE ROBÔS IFRN IEEE VERY SMALL SIZE L. M. T. Rodrigues, I. K. D. Gomes, M. H. S. Cardoso, G. S. Santiago, M. V. Araujo, J. P. F. Guimarães, F. B. Gondim, P. J. Alsina, F. O. Quintaes,
PROJETO DO TIME DE FUTEBOL DE ROBÔS IFRN IEEE VERY SMALL SIZE L. M. T. Rodrigues, I. K. D. Gomes, M. H. S. Cardoso, G. S. Santiago, M. V. Araujo, J. P. F. Guimarães, F. B. Gondim, P. J. Alsina, F. O. Quintaes,
OXENTE TEAM: IMPLEMENTAÇÃO DE HABILIDADES DE JOGO EM UM TIME DE FUTEBOL DE ROBÔS SIMULADO UTILIZANDO OTIMIZAÇÃO HEURÍSTICA
 OXENTE TEAM: IMPLEMENTAÇÃO DE HABILIDADES DE JOGO EM UM TIME DE FUTEBOL DE ROBÔS SIMULADO UTILIZANDO OTIMIZAÇÃO HEURÍSTICA Ana Cláudia Fiorin Pianesso pianesso@ufba.br João Paulo Rocha Portela de Sousa
OXENTE TEAM: IMPLEMENTAÇÃO DE HABILIDADES DE JOGO EM UM TIME DE FUTEBOL DE ROBÔS SIMULADO UTILIZANDO OTIMIZAÇÃO HEURÍSTICA Ana Cláudia Fiorin Pianesso pianesso@ufba.br João Paulo Rocha Portela de Sousa
Sidabro automação e colégio farroupilha. ROBÓTICA No COLÉGIO Farroupilha
 Sidabro automação e colégio farroupilha ROBÓTICA No COLÉGIO Farroupilha Quando você escuta a palavra robótica, o que passa na sua cabeça? Máquinas complexas, engenheiros loucos, cálculos avançados e por
Sidabro automação e colégio farroupilha ROBÓTICA No COLÉGIO Farroupilha Quando você escuta a palavra robótica, o que passa na sua cabeça? Máquinas complexas, engenheiros loucos, cálculos avançados e por
A origem do Futebol: Na China: por volta de 3000 anos a. C. os chineses praticavam um jogo que na verdade era um treino militar. Após as guerras eles
 A história do futebol Educação Física A origem do Futebol: Na China: por volta de 3000 anos a. C. os chineses praticavam um jogo que na verdade era um treino militar. Após as guerras eles formavam equipes
A história do futebol Educação Física A origem do Futebol: Na China: por volta de 3000 anos a. C. os chineses praticavam um jogo que na verdade era um treino militar. Após as guerras eles formavam equipes
Muitos já me perguntaram se eu já sei fazer robôs. No entanto, a maioria das pessoas espera que os robôs tenham braços, rodinhas e olhos brilhantes.
 segunda-feira, 14 de setembro de 2009 Robôs Muitos já me perguntaram se eu já sei fazer robôs. No entanto, a maioria das pessoas espera que os robôs tenham braços, rodinhas e olhos brilhantes. A quantidade
segunda-feira, 14 de setembro de 2009 Robôs Muitos já me perguntaram se eu já sei fazer robôs. No entanto, a maioria das pessoas espera que os robôs tenham braços, rodinhas e olhos brilhantes. A quantidade