Tópicos Especiais I - Jogos IA para Jogos
|
|
|
- Alfredo Palhares Campos
- 6 Há anos
- Visualizações:
Transcrição
")
1 Tópicos Especiais I - Jogos IA para Jogos Game AI 02 Fernando Osório 07/10/2003 IA para Jogos Aula 02 Tópicos abordados... Comportamento: falsa IA e o comportamento inteligente Agentes Reativos Agentes Cognitivos / Deliberativos Agentes com Arquitetura Hierárquica e Híbridos Controle baseado em Autômatos (FSA, RdP) Controle baseado em Regras (RBS Rule Based) Controle Adaptativo: agentes que aprendem Agentes Autônomos Inteligentes Estratégias em Jogos 1

 Busca de caminhos (Path")










2 IA para Jogos IA clássica: Jogos de Ação (Labirintos, Corridas,...) Busca de caminhos (Path finding) Planejamento de ações e trajetórias (Path planning) Deslocamento / Navegação (Motion & Navigation) Farlei Heinen / PIPCA - Unisinos >> Da Busca de Caminhos (A*) à Movimentação Inteligente << Arquitetura de Controle para Agentes Autônomos IA para Jogos IA clássica: Jogos de Ação (Labirintos, Corridas,...) Busca de caminhos (Path finding) Planejamento de ações e trajetórias (Path planning) Deslocamento / Navegação (Motion & Navigation) >> Da Busca de Caminhos (A*) à Movimentação Inteligente << Arquitetura de Controle para Agentes Autônomos 2

3 Comportamento: Falsa IA versus Comportamento inteligente Rotas pré-definidas Comportamento fixo Repetitivo Falta de interação com o ambiente Comportamento: Falsa IA versus Comportamento inteligente WRV200 Zára & Cernohorský 3


4 Comportamento: Falsa IA versus Comportamento inteligente Rotas pré-definidas Comportamento fixo Repetitivo Falta de interação com o ambiente Percepção Reação Interação Adaptação Comportamento: Falsa IA versus Comportamento inteligente Rotas pré-definidas Comportamento fixo Repetitivo Falta de interação com o ambiente Percepção Reação Interação Adaptação Arquitetura de Controle Agentes Autônomos 4
5 - Taxonomia - Taxonomia Sugestão de leitura complementar: Dissertação de Mestrado: Farlei Heinen Sistema de Controle Híbrido para Robôs Móveis Autônomos Dissertação de Mestrado: Cássia dos Santos Ambiente Virtual Inteligente e Adaptativo Trabalho de Conclusão: João Bittencourt Ambiente para Simulação de Múltiplos Agentes Autônomos Pesquisas da Profa. Soraia Musse Proj. CROMOS e HUMUS ( 5
6 Arquiteturas de Controle Agentes Cognitivos / Deliberativos Agentes Reativos Agentes com Arquitetura Hierárquica Agentes com Arquitetura Híbrida Interação Interação com o Ambiente Interação com os outros Agentes Conhecimento Sem Memória / Sem Representação Interna Estático / Inicial Dinâmico / Adquirido Arquiteturas de Controle Agentes Cognitivos / Deliberativos - AgCog Modelo Simbólico e Explícito do Ambiente (mapa) Conhecimento Total (posição, obstáculos, etc) Estado Interno Processo Decisório Plano de Ações Sequência de Ações Agentes Reativos - AgReact Agentes com Arquitetura Hierárquica Agentes com Arquitetura Híbrida 6
7 Arquiteturas de Controle Agentes Cognitivos / Deliberativos - AgCog Modelo Simbólico e Explícito do Ambiente (mapa) Conhecimento Total (posição, obstáculos, etc) Estado Interno Processo Decisório Plano de Ações Sequência de Ações Agentes Reativos - AgReact Agentes com Arquitetura Hierárquica Agentes com Arquitetura Híbrida Imprevistos Arquiteturas de Controle Agentes Cognitivos / Deliberativos - AgCog Modelo Simbólico e Explícito do Ambiente (mapa) Conhecimento Total (posição, obstáculos, etc) Estado Interno Processo Decisório Plano de Ações Sequência de Ações Agentes Reativos - AgReact Agentes com Arquitetura Hierárquica Agentes com Arquitetura Híbrida Agentes Cognitivos? Puros? Agentes Reativos Imprevistos 7
 Estado Interno Processo Decisório Plano de Ações Sequência de Ações Formalismos / Ferramentas Adotadas -")
 Baseados em Regras: RBS Rule Based System (Facts, Rules and Inference) Ferramentas AgCog - Autômato 3D Games Watt &")
8 Arquiteturas de Controle Agentes Cognitivos / Deliberativos - AgCog Modelo Simbólico e Explícito do Ambiente (mapa) Conhecimento Total (posição, obstáculos, etc) Estado Interno Processo Decisório Plano de Ações Sequência de Ações Formalismos / Ferramentas Adotadas - AgCog Autômatos: FSA / FSM Finite-State Autômata HFSA Hierarchical Finite State Autômata RdP Redes de Petri (Hierachical, Coulored, Temporized) Baseados em Regras: RBS Rule Based System (Facts, Rules and Inference) Ferramentas AgCog - Autômato 3D Games Watt & Policarpo 8




 CONTROLE: SEVA-H Seva")
9 Ferramentas AgCog Autômato Planejamento: * Mapa da Geometria do Ambiente * Grafo de Visibilidade * Caminho Ótimo (Dijkstra) Execução: * Controle Deliberativo / Autômato SimRob2D Ferramentas AgCog - Autômato SEVA - Simulador de Estacionamento de Veículos Autônomos (F.( Heinen / PIPCA) CONTROLE: SEVA-H Seva Humano SEVA-A Seva Autômato Autômato Com Sensores SEVA-N Seva Neural 9
 Procurando_Vaga Posicionando Entrando_Vaga Posicionando_Vaga Parado Alinhando Otimizando_Vaga Se Estado_Atual(Procurando_Vaga) e Próximo_ao_Obstáculo(V[4]) e")
10 AgCog Ferramentas: Autômato SEVA - Simulador de Estacionamento de Veículos Autônomos (F.( Heinen / PIPCA) Procurando_Vaga Posicionando Entrando_Vaga Posicionando_Vaga Parado Alinhando Otimizando_Vaga Se Estado_Atual(Procurando_Vaga) e Próximo_ao_Obstáculo(V[4]) e Próximo_ao_Obstáculo(V[5]) Então Speed = Avanço_Rápido e RotVel = Direção_Reta; Se Estado_Atual(Procurando_Vaga) e Longe do_obstáculo(v[2])e Longe do_obstáculo(v[3]) e Longe do_obstáculo(v[4]) e Longe do_obstáculo(v[5]) Então Troca_Estado(Posicionando) e Inicializa(Odômetro); Se Estado_Atual(Posicionando) Então Speed = Avanço_Rápido e Rotvel = Direção_Reta; Se Estado_Atual(Posicionando) e Longe_do_Obstáculo(V[4]) e Deslocamento_Suficiente(Odômetro) Então Estado_atual(Entrando_Vaga) e Inicializa(Odômetro); Se Estado_Atual(Entrando_Vaga) Então Speed = Ré_Rápida e RotVel = Giro_Esquerda_Max; AgCog Ferramentas: Autômato SEVA - Simulador de Estacionamento de Veículos Autônomos (F.( Heinen / PIPCA) Procurando_Vaga Posicionando Entrando_Vaga Posicionando_Vaga Parado Alinhando Otimizando_Vaga Se Estado_Atual(Procurando_Vaga) e Próximo_ao_Obstáculo(V[4]) e Próximo_ao_Obstáculo(V[5]) Então Speed = Avanço_Rápido e RotVel = Direção_Reta; Se Estado_Atual(Procurando_Vaga) e Longe do_obstáculo(v[2])e Longe do_obstáculo(v[3]) e Longe do_obstáculo(v[4]) e Longe do_obstáculo(v[5]) Então Troca_Estado(Posicionando) e Inicializa(Odômetro); Se Estado_Atual(Posicionando) Então Speed = Avanço_Rápido e Rotvel = Direção_Reta; Se Estado_Atual(Posicionando) e Longe_do_Obstáculo(V[4]) e Deslocamento_Suficiente(Odômetro) Então Estado_atual(Entrando_Vaga) e Inicializa(Odômetro); Se Estado_Atual(Entrando_Vaga) Então Speed = Ré_Rápida e RotVel = Giro_Esquerda_Max; X = V * Cos (Φ) * Cos (θ) Eq. 1 Y = V * Cos (Φ) * Cos (θ) Eq. 2 θ = V / L * Sin (Φ) Eq. 3 Y θ X φ 10

 Ferramentas")
 AI for Games and")
11 AgCog Ferramentas: Autômato SEVA 3D - Simulador de Estacionamento de Veículos Autônomos (F.( Heinen / PIPCA) Ferramentas AgCog HSFA (Hierachical Finite State Automata) AI for Games and Animation John Funge 11

 RoboForge: www.")
12 Ferramentas AgCog RdP (Rede de Petri) Um ambiente de modelagem, simulação e controle de processos de manufaturas baseado em Redes de petri coloridas Marcos Lemke Ribes (Unisinos / TC 2003) Disparo de Transição Ferramentas AgCog RBS (Rule Based System) RoboForge: 12



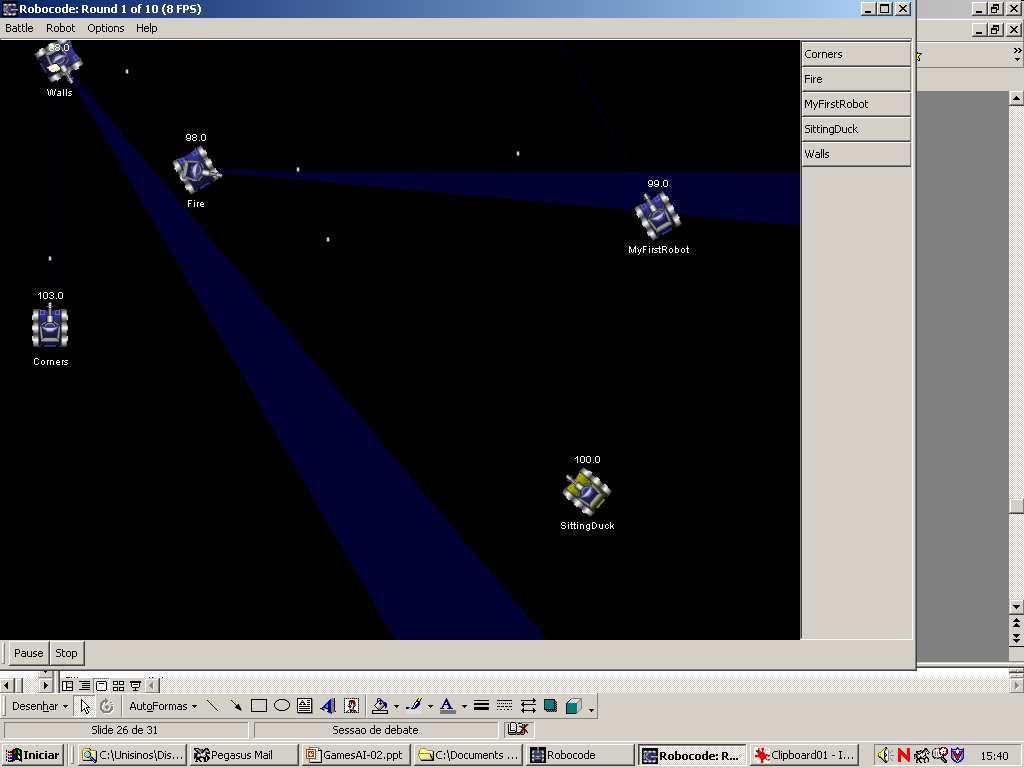

13 RBS (Rule Based System) RoboForge Ferramentas AgCog RBS (Rule Based System) 13

14 Ferramentas AgCog RBS (Rule Based System) package sample; import robocode.*; /** * MyFirstRobot - a sample robot by Mathew Nelson * Moves in a seesaw motion, and spins the gun around at each end */ public class MyFirstRobot extends Robot { /** MyFirstRobot's run method - Seesaw **/ public void run() { while (true) { ahead(100); // Move ahead 100 turngunright(360); // Spin gun around } back(100); // Move back 100 turngunright(360); // Spin gun around } /** Fire when we see a robot **/ public void onscannedrobot(scannedrobotevent e) { fire(1); } /** * We were hit! Turn perpendicular to the bullet, * so our seesaw might avoid a future shot. */ public void onhitbybullet(hitbybulletevent e) { turnleft(90 - e.getbearing()); } } Ferramentas AgCog RBS (Rule Based System) GNU Mages - FuzzyF #******************************************************** # Definicoes das variaveis de entrada #******************************************************** #Terreno - pos. 1 (N) INPUT_VAR = Terreno_N TERM = Impossivel ConstantFunction -1.0 TERM = Dificil TriangularFunction TERM = Medio TriangularFunction TERM = Facil RigthTriangleFunction TERM = Alvo ConstantFunction 1.0 END_VAR #***************************************************************** # Definicoes das Regras - Determinar o status do terreno #***************************************************************** BLOCK_RULES RL = IF Terreno_N IS Impossivel THEN Status_Terreno_N IS Impedido RL = IF Terreno_N IS Alvo THEN Status_Terreno_N IS Impedido... RL= IF Direcao IS NO AND NOT Sonar_Dir_Atras IS Nenhum AND NOT Status_Terreno_L IS Impedido THEN Nova_Direcao IS L CV=0.75 RL= IF Distancia_Bandeira IS Pertissimo THEN Acao IS Pegar_bandeira CV=0.97 RL= IF Bot_com_Bandeira IS Sim THEN Acao IS Parar END_RULES 14
15 Ferramentas AgReact - Reativo Comportamento Assim como é difícil ter um agente puramente deliberativo e baseado em uma única ferramenta (FSA, RBS, etc), também é difícil de se ter um agente puramente reativo, sem memória ou estado interno... Ferramentas AgReact - Reativo Comportamento Assim como é difícil ter um agente puramente deliberativo e baseado em uma única ferramenta (FSA, RBS, etc), também é difícil de se ter um agente puramente reativo, sem memória ou estado interno... Agentes Hierárquicos e Híbridos 15
16 Ferramentas AgReact Reativo... com estados sensação de déjà vu :) Ferramentas AgReact Reativo Hierárquico Arquitetura Horizontal: SMPA Sense, Model, Plan, Act Arquitetura Vertical: Subsumption - Brooks 16
17 Ferramentas Agentes Cognitivos, Reativos e Híbridos Arquitetura Híbrida: Múltiplos Comportamentos Reproduzido de Cássia dos Santos Arquitetura Reativa-Deliberativa: Percepção, Conhecimento, Memória e Raciocínio Ferramentas Agentes Cognitivos, Reativos e Híbridos Reproduzido de Farlei Heinen Reproduzido de Cássia dos Santos Arquitetura BDI B=Belief D=Desire I = Intention Arquitetura AEIO (Multi-Agentes) Agents, Environment, Interaction Organizations [Demazeau] (Programação orientada a Agentes) Arquitetura COHBRA Controle Híbrido de Robôs Autônomos 17


18 Ferramentas: Controle Híbrido SimRob2D SimRob3D / COHBRA!" Poligonal: Os obstáculos são representados por polígonos. Fornecida pelo usuário. Utilizada principalmente pelo Módulo Localizador. Matricial: Representa o ambiente através de uma matriz. Gerada a partir da representação poligonal. Utilizada principalmente para o planejamento de trajetória. Topológica/Semântica: Representa as relações topológicas entre diversas áreas do ambiente, e associa a cada área informações semânticas. Fornecida pelo usuário. Utilizada principalmente para otimizar o planejamento de trajetória. 18


19 !" # $% & Responsável pelo controle reativo do robô móvel, através de diversos comportamentos primitivos operando em paralelo. Comportamentos: -Parar -Vagar -Desviar de Obstáculos -Ir em direção ao Alvo -Inverter Direção Árbitro: Tem a função de unificar as saídas dos diversos comportamentos em um comando único para os atuadores. 19
20 # (')!*+! & Autômato: Responsável pelo seqüênciamento dos comportamentos da camada vital. MMAA Módulo Monitor de Alterações no Ambiente Responsável por atualizar a representação do ambiente. Indica quando ocorre alguma inconsistência e o plano precisa ser recalculado. MIDA Módulo Indicador de Direção do Alvo MMPT Módulo Monitor de Posição Topológica # (')!*+! & Autômato: Responsável pelo seqüênciamento dos comportamentos da camada vital. 20
21 # -,+ &./ 0 -Responsável pelo planejamento de trajetória. -Pré-planejamento utilizando as informações topológicas -Planejamento final utilizando o algoritmo A* na representação matricial do ambiente #.5 & 6! A memória compartilhada é um depósito central de informações que é utilizada para a comunicação entre os diversos módulos. Arquitetura COHBRA Controle Híbrido de Robôs Autônomos 21


 Estratégias em Jogos * Multi-Agentes:")
22 Simulação com o SimRob3D Simulação em Ambiente com Obstáculos Móveis AGENTES REALMENTE ESPECIAIS: Controle Adaptativo: agentes que aprendem Exploração do Ambiente e Construção do Mapa Agentes Autônomos Inteligentes baseado em Sensores Reais (Visão Simulada) Estratégias em Jogos * Multi-Agentes: Comunicação & Cooperação 22
 Estratégias em Jogos * Multi-Agentes: Comunicação & Cooperação AGENTES ESPECIAIS... Não erram jamais!")
23 AGENTES REALMENTE ESPECIAIS: Controle Adaptativo: agentes que aprendem Exploração do Ambiente e Construção do Mapa Agentes Autônomos Inteligentes baseado em Sensores Reais (Visão Simulada) Estratégias em Jogos * Multi-Agentes: Comunicação & Cooperação AGENTES ESPECIAIS... Não erram jamais! 23
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Abril 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
GT-JeDi - Curso de Desenv. de Jogos IA para Jogos
 GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
GT-Jei - Curso de esenv. de Jogos I para Jogos Fernando Osório 2006/2-0 I para Jogos Tópicos abordados... Revisão Introdução à Inteligência rtificial I clássica: Jogos de Raciocínio Solução de problemas
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2016 Disciplina de SSC-0714 1 Março 2016 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas. Ambientes Virtuais Interativos e Inteligentes
 Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2012 Disciplina de SSC-0714 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando em Computação Aplicada - PIP/CA)
") Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Seminário de Pesquisa - Mestrado em Computação Aplicada Robótica Autônoma: Projeto de Sistemas Inteligentes usando Aprendizado de Máquinas Desenvolvido por: Prof. Dr. Fernando Osório* Farlei Heinen* (Mestrando
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2016 > 1o. Trimestre < 1 Março 2016 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2010 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC Instituto
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2013 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Junho 2013 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2013 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Junho 2013 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP
Controle da Tarefa de Estacionamento de um Veículo Autônomo através do Aprendizado de um Autômato Finito usando uma Rede Neural J-CC
 Controle da Tarefa de Estacionamento de um Veículo Autônomo através do Aprendizado de um Autômato Finito usando uma Rede Neural J-CC F. Osório, F. Heinen, L. Fortes UNISINOS Universidade do Vale do Rio
Controle da Tarefa de Estacionamento de um Veículo Autônomo através do Aprendizado de um Autômato Finito usando uma Rede Neural J-CC F. Osório, F. Heinen, L. Fortes UNISINOS Universidade do Vale do Rio
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' #$4!*.+5 #76$8 8'9
 *+! *,$ -) -#.+/ &$0 $$# 1 ' #$4!*.+5 #76$8 8'9") !"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
!"$# %$'& (#) *+! *,$ -) -#.+/ &$0 $"$# 1 ' 2 +3 2#$4!*.+5 #76$8 8'9 :?
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de. Robôs Móveis Autônomos SSC-5888
 - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de. Robôs Móveis Autônomos SSC-5888") USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de Robôs Móveis Autônomos SSC-5888 1 Abril 2015 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < Disciplina de Robôs Móveis Autônomos SSC-5888 1 Abril 2015 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório
Sistema de Controle Híbrido para Robôs Móveis Autônomos
 Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Sistema de Controle Híbrido para Robôs Móveis Autônomos Farlei J. Heinen, Fernando S. Osório Unisinos, Mestrado em Computação Aplicada Av. Unisinos 950, São Leopoldo RS - Brasil farlei@exatas.unisinos.br
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Modelos Baseados em Agentes. Agentes Reativos. Prof. André Campos Aula #4
 Modelos Baseados em Agentes Agentes Reativos Prof. André Campos Aula #4 Concepção de agentes Definir uma arquitetura para o agente Objetivo: especificar a forma na qual as propriedade de Autonomia Reação
Modelos Baseados em Agentes Agentes Reativos Prof. André Campos Aula #4 Concepção de agentes Definir uma arquitetura para o agente Objetivo: especificar a forma na qual as propriedade de Autonomia Reação
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Introdução a Ciência da Computação
 Introdução a Ciência da Computação RoboCode Professor: Jairo de Souza / DCC-UFJF 1 Introdução Aplicativo para implementação de estratégia de jogos Cenário: Um campo de batalha entre robôs Para baixar:
Introdução a Ciência da Computação RoboCode Professor: Jairo de Souza / DCC-UFJF 1 Introdução Aplicativo para implementação de estratégia de jogos Cenário: Um campo de batalha entre robôs Para baixar:
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
INSTITUTO DO EMPREGO E FORMAÇÃO PROFISSIONAL I.E.F.P CENTRO EMPREGO E FORMAÇÃO PROFISSIONAL DE ÉVORA. Guião do Trabalho Prático
 Página1/2 Guião do Trabalho Prático Técnico de Informática e Sistemas Fundamentos de Linguagem JAVA UFCD: 0789 1. Introdução Este Robot foi criado no âmbito da UFCD 0789 Fundamentos de Linguagem Java,
Página1/2 Guião do Trabalho Prático Técnico de Informática e Sistemas Fundamentos de Linguagem JAVA UFCD: 0789 1. Introdução Este Robot foi criado no âmbito da UFCD 0789 Fundamentos de Linguagem Java,
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Inteligência Artificial Agentes Inteligentes
 Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Programa. Tópicos Especiais I Jogos A game is a serie of interesting choices (Sid Meier) Tópicos que serão abordados Avaliação
 Tópicos que serão abordados Avaliação") Tópicos Especiais I Jogos A game is a serie of interesting choices (Sid Meier) Christian Hofsetz, Fernando Osório, Marinho Barcelos e Soraia Musse 31/07/2006 Programa Tópicos que serão abordados Avaliação
Tópicos Especiais I Jogos A game is a serie of interesting choices (Sid Meier) Christian Hofsetz, Fernando Osório, Marinho Barcelos e Soraia Musse 31/07/2006 Programa Tópicos que serão abordados Avaliação
Agentes Autónomos e Sistemas Multi-agente. (UD3 e 4) Agentes Reactivos IST- 2008/2009
 Agentes Reactivos IST- 2008/2009") Agentes Autónomos e Sistemas Multi-agente (UD3 e 4) Agentes Reactivos IST- 2008/2009 Críticas aos Agentes Deliberativos Rapidez na resposta em tempo real representação simbólica e processo de decisão
Agentes Autónomos e Sistemas Multi-agente (UD3 e 4) Agentes Reactivos IST- 2008/2009 Críticas aos Agentes Deliberativos Rapidez na resposta em tempo real representação simbólica e processo de decisão
Prof. Dr. Alexandre da Silva Simões UNESP
 UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
UNESP!! Definição de paradigma!! Principais paradigmas da robótica:!! Paradigma Hierárquico (Deliberativo)!! Exemplos!! Paradigma Reativo!! Exemplos!! Paradigma Híbrido (Reativo-Deliberativo) 1 2!! Números
Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
! #" $ %'&(#(& Controle Inteligente de Robos Móveis: Aplicações da Inteligência Artificial nas Pesquisas em Robótica ) * +, -,. /01 2 + 3 /4 5 6 5 7 8 5 9: ; < = < 6 >? @ 8 6 8 @ 5 6 > A 7 ) - + B * 3
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 02 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 02 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Programação Orientada a Objetos. Prof. André Gustavo Duarte de Almeida www3.ifrn.edu.br/~andrealmeida Robocode
 Programação Orientada a Objetos Prof. André Gustavo Duarte de Almeida andre.almeida@ifrn.edu.br www3.ifrn.edu.br/~andrealmeida Robocode Introdução O robocode é jogo de programação. O objetivo é construir
Programação Orientada a Objetos Prof. André Gustavo Duarte de Almeida andre.almeida@ifrn.edu.br www3.ifrn.edu.br/~andrealmeida Robocode Introdução O robocode é jogo de programação. O objetivo é construir
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS. 2000/2-3o. Trimestre - AULA 01 / FSO
 PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
PIP/CA - Programa Interdisciplinar de Pós-Graduação Mestrado em Computação Aplicada da UNISINOS 2000/2-3o. Trimestre - AULA 01 / FSO Professor Responsável: CONTROLE & ROBÓTICA INTELIGENTE Prof. Dr. Fernando
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
Inteligência Artificial. Prof. Tiago A. E. Ferreira Aula 4 Tipos de Agentes Inteligentes Racionais e Ambientes
 Inteligência Artificial Prof. Tiago A. E. Ferreira Aula 4 Tipos de Agentes Inteligentes Racionais e Ambientes 1 Um programa de IA pode ser visto como um Agente Racional Plano da aula Ambientes e arquiteturas
Inteligência Artificial Prof. Tiago A. E. Ferreira Aula 4 Tipos de Agentes Inteligentes Racionais e Ambientes 1 Um programa de IA pode ser visto como um Agente Racional Plano da aula Ambientes e arquiteturas
INSTITUTO DO EMPREGO E FORMAÇÃO PROFISSIONAL I.E.F.P CENTRO EMPREGO E FORMAÇÃO PROFISSIONAL DE ÉVORA. Guião do Trabalho Prático
 Página1/5 Guião do Trabalho Prático Técnico de Informática e Sistemas Fundamentos de Linguagem JAVA UFCD: 0789 1. Introdução Flying_ Atlantis Destaca-se neste robot o movimento dinâmico e poder de fogo
Página1/5 Guião do Trabalho Prático Técnico de Informática e Sistemas Fundamentos de Linguagem JAVA UFCD: 0789 1. Introdução Flying_ Atlantis Destaca-se neste robot o movimento dinâmico e poder de fogo
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p ,
 Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Disc. Scientia. Série: Ciências Naturais e Tecnológicas, S. Maria, v. 7, n. 1, p. 147-165, 2006. 149 AMBIENTE VIRTUAL PARA SIMULAÇÃO DE ROBÔS MÓVEIS INTELIGENTES APLICADOS NO COMBATE DE INCÊNDIOS FLORESTAIS
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas
 Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Ambientes Virtuais Interativos e Inteligentes: Fundamentos, Implementação e Aplicações Práticas Fernando S. Osório Soraia Raupp Musse Cássia Trojahn dos Santos Farlei Heinen Adriana Braum André Tavares
Aula 6 TECNOLOGIA EM JOGOS DIGITAIS INTELIGÊNCIA ARTIFICIAL PARA JOGOS. Marcelo Henrique dos Santos
 Aula 6 TECNOLOGIA EM JOGOS DIGITAIS INTELIGÊNCIA ARTIFICIAL PARA JOGOS Marcelo Henrique dos Santos Marcelo Henrique dos Santos Mestrado em Educação (em andamento) MBA em Negócios em Mídias Digitais MBA
Aula 6 TECNOLOGIA EM JOGOS DIGITAIS INTELIGÊNCIA ARTIFICIAL PARA JOGOS Marcelo Henrique dos Santos Marcelo Henrique dos Santos Mestrado em Educação (em andamento) MBA em Negócios em Mídias Digitais MBA
Representação de Conhecimento
 em Sistemas baseados em Comportamentos: Mapas cognitivos : apenas locais relevantes Memória Comportamental de Curto-prazo: orientada para a acção baseada em grelhas resolução variada forma: rectangular
em Sistemas baseados em Comportamentos: Mapas cognitivos : apenas locais relevantes Memória Comportamental de Curto-prazo: orientada para a acção baseada em grelhas resolução variada forma: rectangular
Travel Wayfinding Cap. 6 Livro Bowman Cap. 7 Livro Bowman
 Tarefas Universais de Interação 3D 3D User Interfaces http://www.tecgraf.puc-rio.br/~abraposo/inf2791/ Aula 06 Travel e Wayfinding Alberto Raposo Tecgraf, Depto de Informática., PUC-Rio - Rio de Janeiro
Tarefas Universais de Interação 3D 3D User Interfaces http://www.tecgraf.puc-rio.br/~abraposo/inf2791/ Aula 06 Travel e Wayfinding Alberto Raposo Tecgraf, Depto de Informática., PUC-Rio - Rio de Janeiro
Inteligência Artificial (Lista 1) Prof. Alex F. V. Machado
 Prof. Alex F. V. Machado") Ministério da Educação Instituto Federal de Educação, Ciência e Tecnologia Sudeste de Minas Gerais - Campus Rio Pomba Bacharelado em Ciência da Computação 1) Considere os termos abaixo e complete. Inteligência
Ministério da Educação Instituto Federal de Educação, Ciência e Tecnologia Sudeste de Minas Gerais - Campus Rio Pomba Bacharelado em Ciência da Computação 1) Considere os termos abaixo e complete. Inteligência
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Metodologias de Inteligência Artificial 2005/2006
 Arquitecturas de Agentes Metodologias de Inteligência Artificial 2005/2006 Agente Reactivo Agentes Reactivos (Reflexivos): Não tem Estado interno see mapeia Estados do ambiente em Percepções: S P action
Arquitecturas de Agentes Metodologias de Inteligência Artificial 2005/2006 Agente Reactivo Agentes Reactivos (Reflexivos): Não tem Estado interno see mapeia Estados do ambiente em Percepções: S P action
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
INE Introdução a S is temas Multiagente Arquiteturas de agentes
 INE602200 Introdução a S is temas Multiagente Arquiteturas de agentes Ricardo Azambuja Silveira INE-CTC-UFSC E-Mail: silveira@inf.ufsc.br URL: www.inf.ufsc.br/~silveira Tipos de arquiteturas Duas abordagens
INE602200 Introdução a S is temas Multiagente Arquiteturas de agentes Ricardo Azambuja Silveira INE-CTC-UFSC E-Mail: silveira@inf.ufsc.br URL: www.inf.ufsc.br/~silveira Tipos de arquiteturas Duas abordagens
23/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Universidade de São Paulo USP - ICMC Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando
R bó b ti t ca M M vel I nt n e t ligent n e t : D S i S mul u ação à s A p A l p icações n o n
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
ANAIS SIMPÓSIO BRASILEIRO DE PESQUISA OPERACIONAL. Agentes Móveis. José Garcia Vivas Miranda
 ANAIS XLVI SIMPÓSIO BRASILEIRO DE PESQUISA OPERACIONAL Agentes Móveis José Garcia Vivas Miranda 3615 Teoria dos agentes Agentes: Definição Definido por Carl Hewitt (1977) Um agente é considerado uma abstração
ANAIS XLVI SIMPÓSIO BRASILEIRO DE PESQUISA OPERACIONAL Agentes Móveis José Garcia Vivas Miranda 3615 Teoria dos agentes Agentes: Definição Definido por Carl Hewitt (1977) Um agente é considerado uma abstração
1 Introdução Origens
 Introdução 13 1 Introdução 1.1. Origens A biologia trouxe através dos anos inúmeras formas de controle primitivo, que num contexto ambiental geram resultados complexos e eficientes. A inspiração para o
Introdução 13 1 Introdução 1.1. Origens A biologia trouxe através dos anos inúmeras formas de controle primitivo, que num contexto ambiental geram resultados complexos e eficientes. A inspiração para o
CRÉDITOS DO CURSO. Carga Horária Créditos IN1030 Seminários 30 2
 UNIVERSIDADE FEDERAL DE PERNAMBUCO PRÓ-REITORIA PARA ASSUNTOS DE PESQUISA E PÓS-GRADUAÇÃO ESTRUTURA CURRICULAR STRICTO SENSU (baseada na Res. 10/2008 do CCEPE) NOME DO CURSO: Pós-Graduação em Ciência da
UNIVERSIDADE FEDERAL DE PERNAMBUCO PRÓ-REITORIA PARA ASSUNTOS DE PESQUISA E PÓS-GRADUAÇÃO ESTRUTURA CURRICULAR STRICTO SENSU (baseada na Res. 10/2008 do CCEPE) NOME DO CURSO: Pós-Graduação em Ciência da
Protótipo de um Simulador de um Aspirador de Pó, Utilizando Algoritmo de Busca e Agentes Inteligentes, em Ambientes com Barreiras
 Protótipo de um Simulador de um Aspirador de Pó, Utilizando Algoritmo de Busca e Agentes Inteligentes, em Ambientes com Barreiras Jussara Vieira Ramos ROTEIRO Objetivo Introdução: I.A. X Robótica Agentes
Protótipo de um Simulador de um Aspirador de Pó, Utilizando Algoritmo de Busca e Agentes Inteligentes, em Ambientes com Barreiras Jussara Vieira Ramos ROTEIRO Objetivo Introdução: I.A. X Robótica Agentes
Robôs Móveis Inteligentes: Princípios e Técnicas
 Robôs Móveis Inteligentes: Princípios e Técnicas Profa. Roseli Aparecida Francelin Romero Instituto de Ciências Matemáticas e de Computação - USP São Carlos rafrance@icmc.sc.usp.br www.icmc.sc.usp.br/~rafrance
Robôs Móveis Inteligentes: Princípios e Técnicas Profa. Roseli Aparecida Francelin Romero Instituto de Ciências Matemáticas e de Computação - USP São Carlos rafrance@icmc.sc.usp.br www.icmc.sc.usp.br/~rafrance
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
GIA- Grupo de Inteligência Artificial GVPA Grupo de Pesquisas em Veículos Autônomos
 MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
MScFarleiHeinen-farlei@exatas.unisinos.br Dia Fernando da Computação UNOCHAPECÓ, Osório-osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/ Cursos Março de 2004 Informática Colaboradores: Prof.Dr.Christian
Sistema Multiagentes Utilizando a Linguagem AgentSpeak(L) para Criar Estratégias de Armadilha e Cooperação em um Jogo Tipo PacMan
 para Criar Estratégias de Armadilha e Cooperação em um Jogo Tipo PacMan") Sistema Multiagentes Utilizando a Linguagem AgentSpeak(L) para Criar Estratégias de Armadilha e Cooperação em um Jogo Tipo PacMan Alisson Rafael Appio Prof. Jomi Fred Hübner - Orientador Universidade Regional
Sistema Multiagentes Utilizando a Linguagem AgentSpeak(L) para Criar Estratégias de Armadilha e Cooperação em um Jogo Tipo PacMan Alisson Rafael Appio Prof. Jomi Fred Hübner - Orientador Universidade Regional
Banco de dados Brasil
 Banco de dados Brasil Elemento de resolução: célula de 100x100m Conteúdo: linhas de transmissão, casas, quadras, distritos, municípios, estados, país Quais distritos são cortados pela linha de transmissão
Banco de dados Brasil Elemento de resolução: célula de 100x100m Conteúdo: linhas de transmissão, casas, quadras, distritos, municípios, estados, país Quais distritos são cortados pela linha de transmissão
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
Mecânica Técnica. Aula 15 Reações de Apoio em Vigas e Estruturas. Prof. MSc. Luiz Eduardo Miranda J. Rodrigues
 Aula 15 Reações de Apoio em Vigas e Estruturas Tópicos Abordados Nesta Aula Apoios Submetidos a Forças Bidimensionais. Cálculo de Reações de Apoio em Estruturas Isostáticas. Equações de Equilíbrio da Estática
Aula 15 Reações de Apoio em Vigas e Estruturas Tópicos Abordados Nesta Aula Apoios Submetidos a Forças Bidimensionais. Cálculo de Reações de Apoio em Estruturas Isostáticas. Equações de Equilíbrio da Estática
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 20 Waypoints e Pathfinding Edirlei Soares de Lima Introdução Locomover-se no espaço do jogo é uma ação fundamental dos NPCs em qualquer gênero
INF 1771 Inteligência Artificial Aula 20 Waypoints e Pathfinding Edirlei Soares de Lima Introdução Locomover-se no espaço do jogo é uma ação fundamental dos NPCs em qualquer gênero
Computação Gráfica Interativa Animação Computação Cognitiva Vida Artificial
 Computação Gráfica Interativa Animação Computação Cognitiva Vida Artificial Prof. Dr. Depto. Engenharia de Sistemas Eletrônicos Escola Politécnica - Universidade de São Paulo Índice Computação Gráfica
Computação Gráfica Interativa Animação Computação Cognitiva Vida Artificial Prof. Dr. Depto. Engenharia de Sistemas Eletrônicos Escola Politécnica - Universidade de São Paulo Índice Computação Gráfica
JADEX: A BDI REASONING ENGINE. Alexander Pokahr, Lars Braubach e Winfried Lamersdorf Springer US - Multi-Agent Programming 2005 pp.
 JADEX: A BDI REASONING ENGINE Alexander Pokahr, Lars Braubach e Winfried Lamersdorf Springer US - Multi-Agent Programming 2005 pp. 149-174 Volume 15 Motivação Existem muitas plataformas para desenvolvimento
JADEX: A BDI REASONING ENGINE Alexander Pokahr, Lars Braubach e Winfried Lamersdorf Springer US - Multi-Agent Programming 2005 pp. 149-174 Volume 15 Motivação Existem muitas plataformas para desenvolvimento
Fundamentos de Inteligência Artificial [5COP099]
![Fundamentos de Inteligência Artificial [5COP099]](/thumbs/81/84038238.jpg "Fundamentos de Inteligência Artificial [5COP099]") Fundamentos de Inteligência Artificial [5COP099] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre Assunto Aula 2 Agentes Inteligentes 2 de 22 Sumário Introdução Propriedades dos Agentes
Fundamentos de Inteligência Artificial [5COP099] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre Assunto Aula 2 Agentes Inteligentes 2 de 22 Sumário Introdução Propriedades dos Agentes
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
Robótica Autônoma Sensores e Atuadores
 * Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
* Sensores: Percepção do Ambiente Robótica Autônoma Sensores e Atuadores * Atuadores: Ações e Movimentação do Robô MIT -OCW * Sensores: Robótica Autônoma Sensores e Atuadores Distância: Luz, Som, Força
Protótipo de um robô rastreador de objetos. Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer
 Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Modelando as ações dos agentes... (continuação) Modelando as ações dos agentes... (continuação)
 Modelando as ações dos agentes... (continuação)") Modelando as ações dos agentes... (continuação) O que precisa ser modelado em um SMA Modelar as ações dos agentes e suas consequências no ambiente Funcionamento do agente visto do seu interior e do exterior
Modelando as ações dos agentes... (continuação) O que precisa ser modelado em um SMA Modelar as ações dos agentes e suas consequências no ambiente Funcionamento do agente visto do seu interior e do exterior
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Inteligência Computacional para Jogos Eletrônicos
 Inteligência Computacional para Jogos Eletrônicos Papéis da IA em Jogos Adversários Aliados Personagens de apoio NPC s (Non-player Character) Comentaristas Controle de câmera Geração de fases Nivelamento
Inteligência Computacional para Jogos Eletrônicos Papéis da IA em Jogos Adversários Aliados Personagens de apoio NPC s (Non-player Character) Comentaristas Controle de câmera Geração de fases Nivelamento
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Informática I. Aula 21. Aula 21-07/11/06 1
 Informática I Aula 21 http://www.ic.uff.br/~bianca/informatica1/ Aula 21-07/11/06 1 Aula de hoje Explicação sobre o trabalho 3 Jogo de prospecção de petróleo por robôs. http://www.inf.puc-rio.br/~mascarenhas/robots/
Informática I Aula 21 http://www.ic.uff.br/~bianca/informatica1/ Aula 21-07/11/06 1 Aula de hoje Explicação sobre o trabalho 3 Jogo de prospecção de petróleo por robôs. http://www.inf.puc-rio.br/~mascarenhas/robots/
Ambientes Virtuais. Soraia Raupp Musse 06/12/2012
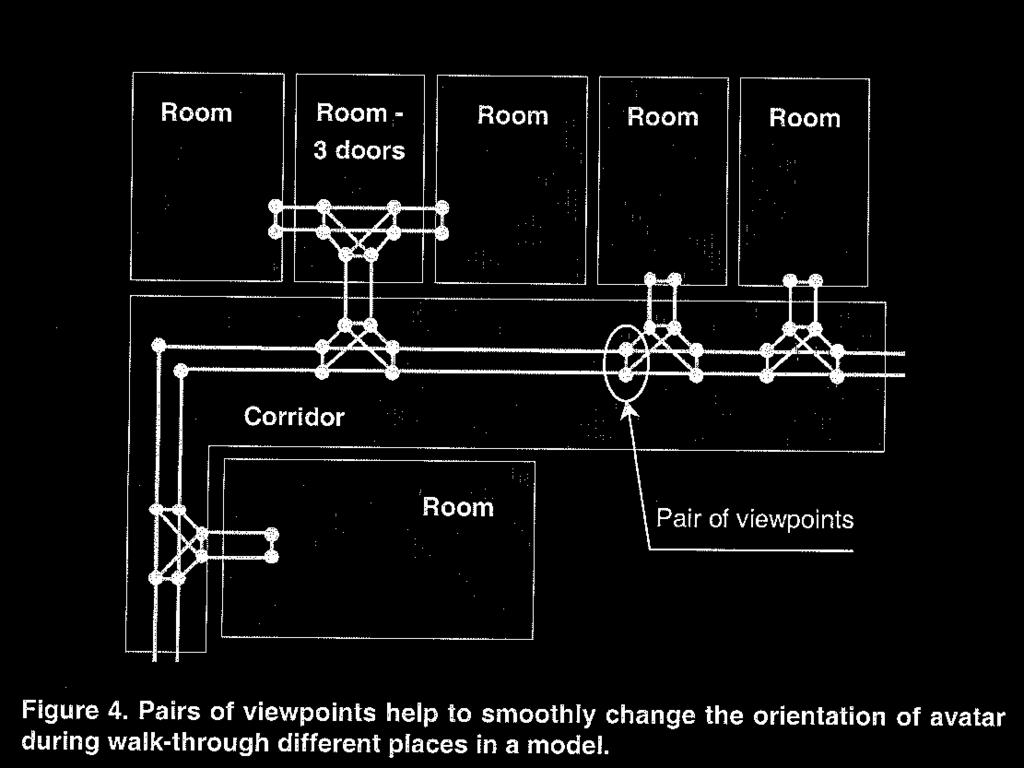
 Ambientes Virtuais Soraia Raupp Musse 06/12/2012 Ambientes Aparência geometria funcionalidade - semântica Histórico: Ambientes Informados Informação não estruturada e não formal para representação do conhecimento
Ambientes Virtuais Soraia Raupp Musse 06/12/2012 Ambientes Aparência geometria funcionalidade - semântica Histórico: Ambientes Informados Informação não estruturada e não formal para representação do conhecimento
Classificação de Sistemas de Simulação. Profa. Dra. Soraia Raupp Musse
 Classificação de Sistemas de Simulação Profa. Dra. Soraia Raupp Musse Quem é real? Simulação de Sistemas SIMULAÇÃO IMPLICA NA MODELAGEM DE UM PROCESSO OU SISTEMA, DE TAL FORMA QUE O MODELO IMITE AS RESPOSTAS
Classificação de Sistemas de Simulação Profa. Dra. Soraia Raupp Musse Quem é real? Simulação de Sistemas SIMULAÇÃO IMPLICA NA MODELAGEM DE UM PROCESSO OU SISTEMA, DE TAL FORMA QUE O MODELO IMITE AS RESPOSTAS
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
Sumário. Apresentação...17 Prefácio à 5ª edição...19 Prefácio...21
 Sumário Apresentação...17 Prefácio à 5ª edição...19 Prefácio...21 1 Simulação...25 1.1 Modelagem de sistemas...25 1.2 Aspectos históricos...26 1.2.1 Teoria das filas...26 1.2.2 Simulação...26 1.3 Aplicações
Sumário Apresentação...17 Prefácio à 5ª edição...19 Prefácio...21 1 Simulação...25 1.1 Modelagem de sistemas...25 1.2 Aspectos históricos...26 1.2.1 Teoria das filas...26 1.2.2 Simulação...26 1.3 Aplicações
CURSO DE GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO MATRIZ CURRICULAR MATUTINO Fase N.
 CURSO DE GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO MATRIZ CURRICULAR MATUTINO Fase N. Ordem Código COMPONENTE CURRICULAR Créditos Horas Prérequisitos 01 Introdução à informática 04 60 02 Matemática instrumental
CURSO DE GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO MATRIZ CURRICULAR MATUTINO Fase N. Ordem Código COMPONENTE CURRICULAR Créditos Horas Prérequisitos 01 Introdução à informática 04 60 02 Matemática instrumental