Capítulo 3. Função de transferência e dinâmicas dos sistemas (Parte D, continuação)
|
|
|
- Marcelo Machado Jardim
- 6 Há anos
- Visualizações:
Transcrição
1 DINÂMICA DE SISTEMAS BIOLÓGICOS E FISIOLÓGICOS Capítulo 3 Função de transferência e dinâmicas dos sistemas (Parte D, continuação) Juntando agora os três casos numa só figura, A resposta y(t) classifica-se como ADC/FCTUC/EB/DSBF/Capítulo 3/
2 O coeficiente de amortecimento e a frequência natural são propriedades intrínsecas do sistema. Representando no plano complexo, ω n é o módulo das raízes complexas e ξ o coseno do ângulo com o eixo real negativo (ver figura seguinte). A frequência natural amortecida depende desses dois parâmetros. Como se vê na figura, se ξ aumenta, os pólos aproximam-se do eixo real e ω d diminui. A frequência natural também se chama frequência de ressonância do sistema. Há várias características da resposta temporal de sistemas de 2ª ordem que têm interesse prático, e são ilustradas na figura seguinte. ADC/FCTUC/EB/DSBF/Capítulo 3/
3 Por exemplo o tempo de subida exprime a rapidez do sistema a responder a uma entrada. O tempo de estabelecimento mede o tempo que o sistema leva para alcançar um regime final (constante) quando a entrada é um degrau. A sobre-elevação mede uma característica frequente de sistemas dinâmicos: a resposta ultrapassa o valor final antes de se estabelecer. ADC/FCTUC/EB/DSBF/Capítulo 3/
4 Efeito da introdução de um zero: Se introduzirmos um zero no sistema de 2ª ordem anterior, teremos O zero está expresso como um múltiplo de ξω n, a parte real dos pólos, por conveniência de análise. Fazendo simulações para diversos valores de α, obtêm-se os gráficos da figura, par ao caso de ξ=0,5. O zero altera fundamentalmente a sobreelevação e o tempo de subida. Quanto mais influente é, maior o tempo de subida, mais rápido é o sistema) e maior a sobreelevação. O zero tem assim um efeito de aceleração. A localização do zero no plano complexo determina a intensidade desse efeito. diminui a sua influência Quanto mais longe dos pólos estiver o zero (em direcção de - ), menor é a sua influência. E se se introduzir um pólo adicional, passando-se a um sistema de 3ª ordem? ADC/FCTUC/EB/DSBF/Capítulo 3/
5 3.10. Sistemas de 3ª ordem Um sistema de 3ª ordem tem três pólos e pode obter-se de um de 2ª com um pólo adicional. Para manter G(0)=1, seja G(s) Para uma entrada em degrau, e simulando para vários valores de α, obtêm-se as curvas da figura seguinte. O terceiro pólo aumenta o tempo de subida, a resposta fica mais lenta. Quanto mais próximo estiver da origem, mais influente é. Em - não tem influência. A posição do terceiro pólo depende do valor de α. ADC/FCTUC/EB/DSBF/Capítulo 3/
6 3.11. Sistemas de 4ª ordem e superior Do que vimos anteriormente podem-se enunciar os seguintes princípios gerais: um zero adicional acelera a resposta e aumenta a sobre-elevação (torna o sistema mais leve ) um pólo adicional trava a resposta e diminui a sobre-elevação (torna o sistema mais pesado ). Graficamente, teremos os seguintes efeitos sobre a resposta temporal, para uma entrada em degrau: Sistemas de fase não-mínima (zeros no SPD) Para que um sistema seja estável, não pode ter pólos no Semi-Plano Direito, e por isso se diz a região de instabilidade. Os zeros não influenciam a estabilidade e podem situar-se, desse ponto de vista, em qualquer ponto do plano complexo. No entanto influenciam o regime transitório da resposta. Podemos dizer que os zeros não influenciam o longo prazo, mas apenas o curto-prazo. Vejamos um exemplo de uma função de transferência com um zero no SPD. Sejam s 2 ( s 2) 1 i) Gs ( ) = ii) Gs ( ) = e Us ( ) = ( s+ 1)( s+ 2) ( s+ 1)( s+ 2) s Note-se que as funções de transferência têm ganhos de sinal contrário. ADC/FCTUC/EB/DSBF/Capítulo 3/

7 Para a primeira teremos Para a segunda-feira, e dado o sinal contrário de G(s), teremos uma saída simétrica. Graficando, obtém-se a figura seguinte, que ilustra o comportamento típico dos sistemas chamados de fase não-mínima ou de resposta inversa (porque a resposta inicia-se em direcção contrária à final) ADC/FCTUC/EB/DSBF/Capítulo 3/
.")
8 3.13. Sistemas com atraso puro A equação diferencial diz-nos que a entrada do instante t-t 1 influencia a saída no instante t.a entrada necessita de um intervalo de tempo t 1 para ter efeito sobre a saída. Diz-se que t 1 é um atraso puro (pure time delay). O diagrama de simulação desta equação diferencial é y(0) Aplicando a transformada de Laplace à equação diferencial, tendo em atenção a propriedade de deslocamento temporal, e invertendo, obtém se Ou seja, a resposta às condições iniciais não é afectada pelo atraso (como era de prever, atendendo ao diagrama de simulação, dado que elas entra directamente no integrador). Mas a resposta à entrada é afectada pelo atraso. Considerando-a separadamente, obtém-se uma função não-racional, e portanto para ela não é possível calcular a transformada inversa de Laplace. ADC/FCTUC/EB/DSBF/Capítulo 3/
.")
9 Com calcular y(t) nestas circunstâncias adversas? Tomemos o seguinte dois sistemas em paralelo, com a mesma entrada, Na parte de baixo, não havendo atraso puro, não há qualquer problema em calcular y(t). Mas na parte de cima aparece o termo irracional do atraso puro. Mas haverá alguma relação entre a saída de cima e a de baixo? Se houver, e se a conhecermos, poderemos obter a resposta de cima desde que tenhamos obtido a resposta de baixo. Ora atendendo à natureza do atraso puro, um efeito que apenas retarda as coisas, poderemos concluir que a relação entre as duas entradas é ilustrada pela figura Em geral, para a mesma entrada U(s) ADC/FCTUC/EB/DSBF/Capítulo 3/
 for estável), Tendo G(s), para calcular a resposta em regime final para uma entrada em degrau unitário, basta substituir s por zero em G(s) e fazer as contas.")
10 3.14. Resposta em regime final A saída em regime final, ou o valor final da saída, é definido por, No caso em que u(t) é um degrau unitário, Aplicando o teorema do valor final (note-se que tal só é válido se G(s) for estável), Tendo G(s), para calcular a resposta em regime final para uma entrada em degrau unitário, basta substituir s por zero em G(s) e fazer as contas. O valor constante obtido é o ganho do sistema: de facto (pelo facto de a entrada ser 1). ADC/FCTUC/EB/DSBF/Capítulo 3/
11 3.15. Síntese ADC/FCTUC/EB/DSBF/Capítulo 3/
12 ADC/FCTUC/EB/DSBF/Capítulo 3/


 sistemas em série: produto das funções de transferência ii) sistemas em")
13 5.15. Vantagens e limites da função de transferência. A função de transferência é um conceito e uma ferramenta muito útil em estudos de dinâmica de sistemas. É fácil com ela calcular a resposta do sistema a qualquer entrada, incluindo a entrada impulsional. Com ela pode-se descrever matematicamente a composição de subsistemas. Por exemplo: i) sistemas em série: produto das funções de transferência ii) sistemas em paralelo: soma das funções de transferência iii) sistemas com retroacção negativa ADC/FCTUC/EB/DSBF/Capítulo 3/

14 iv) sistemas com retroacção positiva Esta forma de representação tem também sérias limitações. A mais grave resulta do facto de só se poder aplicar a sistemas lineares Quando existem cancelamentos no seu cálculo, como vimos anteriormente, ela não é capaz de representar completamente todas as características relevantes do sistema; dizse então que é uma representação incompleta. Bibliografia Baura G. D, System Theory and Practical Applications of Biomedical Signals, (Biomedical Engineering S.), John Wiley and Sons, 2002 Carvalho, J. L. M, Sistemas de Controlo Automático.. LTC- Livros Técnicos e Científicos Editora, Chen, C.T. Systems and Signals Analysis, 2nd Ed, Saunders College Bupl, 1994 Franlkin, G.F, J.D. Powell and Niemi, Dynamical Systems, Addison-Wesley, Khoo, Michael, Physiological Control Systems: Analysis, Simulation, and Estimation by; John Wiley and Sons, Ribeiro, M. Isabel, Análise de Sistemas Lineares,., IST Press ADC/FCTUC/EB/DSBF/Capítulo 3/
Sistemas Dinâmicos em Biologia e Fisiologia
 Sistemas Dinâmicos em Biologia e Fisiologia Módulo da disciplina de Modelos dos Processos Fisiológicos do Homem Licenciatura em Engenharia Biomédica Jorge Henriques Departamento de Engenharia Informática
Sistemas Dinâmicos em Biologia e Fisiologia Módulo da disciplina de Modelos dos Processos Fisiológicos do Homem Licenciatura em Engenharia Biomédica Jorge Henriques Departamento de Engenharia Informática
Capítulo 3. Função de transferência e dinâmicas dos sistemas
 DINÂMICA DE SISTEMAS BIOLÓGICOS E FISIOLÓGICOS Capítulo 3 Função de transferência e dinâmicas dos sistemas 3.1. Aplicação da transformada de Laplace às equações diferenciais A transformada de Laplace é
DINÂMICA DE SISTEMAS BIOLÓGICOS E FISIOLÓGICOS Capítulo 3 Função de transferência e dinâmicas dos sistemas 3.1. Aplicação da transformada de Laplace às equações diferenciais A transformada de Laplace é
Métodos de Resposta em Frequência Parte 2. Controle de Sistemas Renato Dourado Maia (Unimontes)
") Métodos de Resposta em Frequência Parte 2 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Sistemas de Fase Mínima e Não Mínima Um sistema pode ter zeros no semiplano direito e ser também estável.
Métodos de Resposta em Frequência Parte 2 Controle de Sistemas Renato Dourado Maia (Unimontes) 1 Sistemas de Fase Mínima e Não Mínima Um sistema pode ter zeros no semiplano direito e ser também estável.
4.1 Pólos, Zeros e Resposta do Sistema
 ADL17 4.1 Pólos, Zeros e Resposta do Sistema A resposta de saída de um sistema é a soma de duas respostas: a resposta forçada e a resposta natural. Embora diversas técnicas, como a solução de equações
ADL17 4.1 Pólos, Zeros e Resposta do Sistema A resposta de saída de um sistema é a soma de duas respostas: a resposta forçada e a resposta natural. Embora diversas técnicas, como a solução de equações
Capítulo 2 Dinâmica de Sistemas Lineares
 Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Controle de Processos Aula: Sistemas de 1ª e 2ª ordem
 107484 Controle de Processos Aula: Sistemas de 1ª e 2ª ordem Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistemas de 1ª e 2ª ordem Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química 2014/1
 Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 8: Sistemas de Primeira Ordem (Continuação): Sistema Lead-Lag; Sistemas
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 8: Sistemas de Primeira Ordem (Continuação): Sistema Lead-Lag; Sistemas
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. rech.cassiano@gmail.com Prof. Rafael Concatto Beltrame, Me.
Aula 9. Diagrama de Bode
 Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Aula 9 Diagrama de Bode Hendrik Wade Bode (americano,905-98 Os diagramas de Bode (de módulo e de fase são uma das formas de caracterizar sinais no domínio da frequência. Função de Transferência Os sinais
Fundamentos de Controle
 Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Fundamentos de Controle Análise de resposta transitória. Sistemas de primeira e segunda ordem. Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Resposta no Tempo. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Resposta no Tempo Carlos Alexandre Mello 1 Resposta no Tempo - Introdução Como já discutimos, após a representação matemática de um subsistema, ele é analisado em suas respostas de transiente e de estadoestacionário
Resposta no Tempo Carlos Alexandre Mello 1 Resposta no Tempo - Introdução Como já discutimos, após a representação matemática de um subsistema, ele é analisado em suas respostas de transiente e de estadoestacionário
TRANSFORMADA DE LAPLACE E OPERADORES LINEARES
 TRANSFORMADA DE LAPLACE E OPERADORES LINEARES O DOMÍNIO DE LAPLACE Usualmente trabalhamos com situações que variam no tempo (t), ou seja, trabalhamos no domínio do tempo. O domínio de Laplace é um domínio
TRANSFORMADA DE LAPLACE E OPERADORES LINEARES O DOMÍNIO DE LAPLACE Usualmente trabalhamos com situações que variam no tempo (t), ou seja, trabalhamos no domínio do tempo. O domínio de Laplace é um domínio
Métodos de Resposta em Freqüência
 Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
1. Sinais de teste. 2. Sistemas de primeira ordem. 3. Sistemas de segunda ordem. Especificações para a resposta
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 3 a Série (root-locus, análise e projecto no plano-s) As questões assinaladas com * serão abordadas na correspondente aula
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 3 a Série (root-locus, análise e projecto no plano-s) As questões assinaladas com * serão abordadas na correspondente aula
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
Entradas sinusoidais
 Carla C. Pinheiro e F. Lemos Dinâmica de Sistemas e Controlo de Processos DEQB - IST Entradas sinusoidais U(s) G(s) Y(s) Estudar a resposta de um sistema linear estável para alterações do tipo sinusoidal
Carla C. Pinheiro e F. Lemos Dinâmica de Sistemas e Controlo de Processos DEQB - IST Entradas sinusoidais U(s) G(s) Y(s) Estudar a resposta de um sistema linear estável para alterações do tipo sinusoidal
EES-49/2012 Prova 1. Q1 Dado o seguinte conjunto de equações:
 Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
V. ANÁLISE NO DOMÍNIO DO TEMPO
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE V. ANÁLISE NO DOMÍNIO DO TEMPO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de
Transformada Z. Transformada Z
 Semelhante ao apresentado anteriormente, entre a relação das transformadas de Fourier e de Laplace, será visto que a generalização da representação senoidal complexa de um sinal de tempo discreto pela
Semelhante ao apresentado anteriormente, entre a relação das transformadas de Fourier e de Laplace, será visto que a generalização da representação senoidal complexa de um sinal de tempo discreto pela
J. A. M. Felippe de Souza 10 Estabilidade. 10 Estabilidade
 J. A. M. Felippe de Souza 10 Estabilidade 10 Estabilidade 10.1 Introdução à Estabilidade 3 Definição 10.1 Estabilidade 3 Definição 10.2 - BIBO-estável 3 Teorema 10.1 Localização dos polos 4 Exemplo 10.1
J. A. M. Felippe de Souza 10 Estabilidade 10 Estabilidade 10.1 Introdução à Estabilidade 3 Definição 10.1 Estabilidade 3 Definição 10.2 - BIBO-estável 3 Teorema 10.1 Localização dos polos 4 Exemplo 10.1
Estabilidade de Sistemas Lineares Realimentados
 Estabilidade de Sistemas Lineares Realimentados 1. Conceito de estabilidade 2. Critério de estabilidade de Routh-Hurwitz p.1 Engenharia de Controle Aula 6 Estabilidade de Sistemas Lineares Realimentados
Estabilidade de Sistemas Lineares Realimentados 1. Conceito de estabilidade 2. Critério de estabilidade de Routh-Hurwitz p.1 Engenharia de Controle Aula 6 Estabilidade de Sistemas Lineares Realimentados
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos Lajovic
Indice. Resposta forçada (condições iniciais nulas)
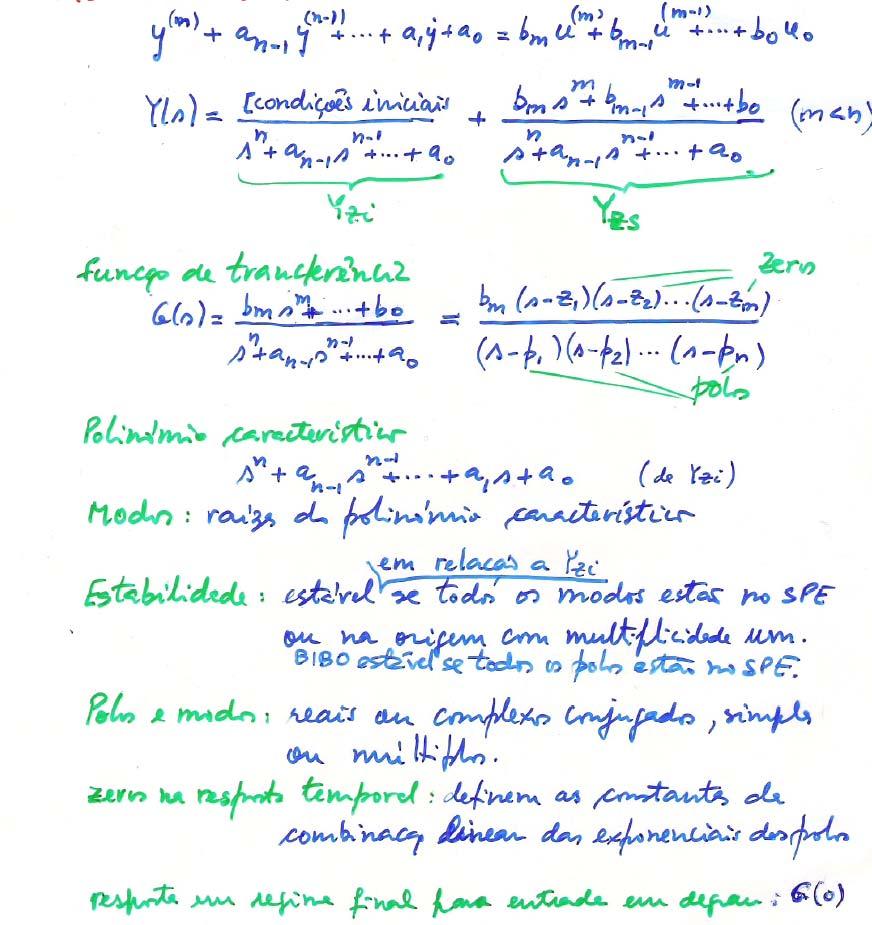
") Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Resumo. Sinais e Sistemas Transformada de Laplace. Resposta ao Sinal Exponencial
 Resumo Sinais e Sistemas Transformada de aplace uís Caldas de Oliveira lco@istutlpt Instituto Superior Técnico Definição da transformada de aplace Região de convergência Propriedades da transformada de
Resumo Sinais e Sistemas Transformada de aplace uís Caldas de Oliveira lco@istutlpt Instituto Superior Técnico Definição da transformada de aplace Região de convergência Propriedades da transformada de
Indice Introdução Sistemas contínuos descritos por equações diferenciais lineares de coeficientes constantes... 75
 , Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
, Indice 1 Sinais e Sistemas 1 1.1 Introdução aos Sinais e Sistemas 1 1.2 Sinais............... 3 1.2.1 O que são sinais?..... 3 1.2.2 Transformações lineares da variável independente 5 1.2.3 Propriedades
Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
Desempenho de Sistemas de Controle Realimentados. 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Sumário. CAPÍTULO 1 Introdução 1. CAPÍTULO 2 Terminologia dos Sistemas de Controle 14
 Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
SC1 Sistemas de Controle 1. Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
Transformada de Laplace
 Sinais e Sistemas Transformada de Laplace lco@ist.utl.pt Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
Sinais e Sistemas Transformada de Laplace lco@ist.utl.pt Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
O Papel dos Pólos e Zeros
 Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
Fundamentos de Controlo
 Fundamentos de Controlo a Série Resposta no Tempo de Sistemas Causais. S.1 Exercícios Resolvidos P.1 Seja H(s) = s (s + ) a função de transferência de um SLIT contínuo causal. Qual dos sinais da Figura
Fundamentos de Controlo a Série Resposta no Tempo de Sistemas Causais. S.1 Exercícios Resolvidos P.1 Seja H(s) = s (s + ) a função de transferência de um SLIT contínuo causal. Qual dos sinais da Figura
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II
 Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Questões para Revisão Controle
 Questões para Revisão Controle 1. (PROVÃO-1999)A Figura 1 apresenta o diagrama de blocos de um sistema de controle, e a Figura 2, o seu lugar das raízes para K > 0. Com base nas duas figuras, resolva os
Questões para Revisão Controle 1. (PROVÃO-1999)A Figura 1 apresenta o diagrama de blocos de um sistema de controle, e a Figura 2, o seu lugar das raízes para K > 0. Com base nas duas figuras, resolva os
Caracterização Dinâmica de Instrumentos
 Instrumentação Industrial Caracterização Dinâmica de Instrumentos Caracterização Dinâmica Os Instrumentos são, de fato, Sistemas Dinâmicos. x t y t t t Instrumento O Comportamento transitório é determinado
Instrumentação Industrial Caracterização Dinâmica de Instrumentos Caracterização Dinâmica Os Instrumentos são, de fato, Sistemas Dinâmicos. x t y t t t Instrumento O Comportamento transitório é determinado
(c) G d (z) = (d) G d (z) = A função de transferência do equivalente por invariância da resposta impulsional é = Z
 G d (z) = (d) G d (z) = A função de transferência do equivalente por invariância da resposta impulsional é = Z") Parte I Escolha múltipla h Tópicos de resolução A função de transferência do sistema cuja resposta ao degrau unitário está representada na figura é 8 (a) G(s) = s + 6s + 4 8 (b) G(s) = s + 4s + 4 8 (c)
Parte I Escolha múltipla h Tópicos de resolução A função de transferência do sistema cuja resposta ao degrau unitário está representada na figura é 8 (a) G(s) = s + 6s + 4 8 (b) G(s) = s + 4s + 4 8 (c)
Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
PROJETO DE CONTROLADORES A PARTIR DO PLANO S. critério Routh-Hurwitz análise de estabilidade análise de desempenho
 PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
Fundamentos de Controlo
 Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Fundamentos de Controlo
 Fundamentos de Controlo 4 a Série Root-locus: traçado, análise e projecto. S4.1 Exercícios Resolvidos P4.1 Considere o sistema de controlo com retroacção unitária representado na Figura 1 em que G(s) =
Fundamentos de Controlo 4 a Série Root-locus: traçado, análise e projecto. S4.1 Exercícios Resolvidos P4.1 Considere o sistema de controlo com retroacção unitária representado na Figura 1 em que G(s) =
Mestrado Integrado em Engenharia Electrotécnica e de Computadores - MEEC CONTROLO. 1º semestre Introdução ao Matlab e Simulink
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores - MEEC CONTROLO º semestre 0-0 Introdução ao Matlab e Simulink - Ensaios a realizar durante a sessão de Laboratório Objectivo: Familiarização
Mestrado Integrado em Engenharia Electrotécnica e de Computadores - MEEC CONTROLO º semestre 0-0 Introdução ao Matlab e Simulink - Ensaios a realizar durante a sessão de Laboratório Objectivo: Familiarização
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Filipe Fraga Sistemas de Controle 1 4. Resposta no Domínio do Tempo 4.1 Introdução
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap4 Resposta no Domínio do Tempo Prof. Filipe Fraga Sistemas de Controle 1 4. Resposta no Domínio do Tempo 4.1 Introdução
Objetivos de Controle
 Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Analises usando funções descritivas
 MÉTODO DA FUNÇÃO DESCRITIVA Analises usando funções descritivas Os ciclos limites aparecem em sistemas de qualquer tipo, sejam de toda natureza ou induzida. Os mais conhecidos são aqueles devido a histerese,
MÉTODO DA FUNÇÃO DESCRITIVA Analises usando funções descritivas Os ciclos limites aparecem em sistemas de qualquer tipo, sejam de toda natureza ou induzida. Os mais conhecidos são aqueles devido a histerese,
Estabilidade de sistemas de controle lineares invariantes no tempo
 Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
UNIVERSIDADE LUSÍADA DE LISBOA. Programa da Unidade Curricular SINAIS E SISTEMAS Ano Lectivo 2010/2011
 Programa da Unidade Curricular SINAIS E SISTEMAS Ano Lectivo 2010/2011 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Electrotécnica e de Computadores 3. Ciclo de
Programa da Unidade Curricular SINAIS E SISTEMAS Ano Lectivo 2010/2011 1. Unidade Orgânica Ciências da Economia e da Empresa (1º Ciclo) 2. Curso Engenharia Electrotécnica e de Computadores 3. Ciclo de
Escolha da Função de Transferência Desejada
 43 Escolha da Função de Transferência Desejada Utilizar regras intuitivas dos sistemas contínuos. Eg. Sistema de segunda ordem: Amplitude 1.4 1.2 1.8.6.4 t p t s Step Response S ± 1% ω ξω ω ξω ω.2 1 2
43 Escolha da Função de Transferência Desejada Utilizar regras intuitivas dos sistemas contínuos. Eg. Sistema de segunda ordem: Amplitude 1.4 1.2 1.8.6.4 t p t s Step Response S ± 1% ω ξω ω ξω ω.2 1 2
Analise sistemas LCIT usando a Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
A Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
Comportamento Dinâmico de Sistemas de Primeira Ordem. Sistemas de Primeira Ordem (CP1) DEQ/UFSCar 1 / 46
 DEQ/UFSCar 1 / 46") Comportamento Dinâmico de Sistemas de Primeira Ordem Sistemas de Primeira Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 1 / 46 Roteiro 1 Sistemas de Primeira Ordem Função de Transferência
Comportamento Dinâmico de Sistemas de Primeira Ordem Sistemas de Primeira Ordem (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 1 / 46 Roteiro 1 Sistemas de Primeira Ordem Função de Transferência
Aula 18: Projeto de controladores no domínio da frequência
 Aula 18: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 26 de outubro de 2017. prof. Dr. Eduardo Bento Pereira
Aula 18: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 26 de outubro de 2017. prof. Dr. Eduardo Bento Pereira
Sinais e Sistemas Mecatrónicos
 Sinais e Sistemas Mecatrónicos Análise de Sistemas No Domínio da Frequência José Sá da Costa José Sá da Costa T3 - Análise de Sistemas Lineares na Frequência cont. Diagramas de Bode Construção dos Diagramas
Sinais e Sistemas Mecatrónicos Análise de Sistemas No Domínio da Frequência José Sá da Costa José Sá da Costa T3 - Análise de Sistemas Lineares na Frequência cont. Diagramas de Bode Construção dos Diagramas
PSI.3031 LABORATÓRIO DE CIRCUITOS ELETRICOS INTRODUÇÃO TEÓRICA EXPERIÊNCIA 10: REDES DE SEGUNDA ORDEM
 ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO Departamento de Engenharia de Sistemas Eletrônicos PSI - EPUSP PSI.3031 LABORATÓRIO DE CIRCUITOS ELETRICOS INTRODUÇÃO TEÓRICA Edição 2017 E.Galeazzo / L.Yoshioka
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO Departamento de Engenharia de Sistemas Eletrônicos PSI - EPUSP PSI.3031 LABORATÓRIO DE CIRCUITOS ELETRICOS INTRODUÇÃO TEÓRICA Edição 2017 E.Galeazzo / L.Yoshioka
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
I Controle Contínuo 1
 Sumário I Controle Contínuo 1 1 Introdução 3 1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada................ 5 1.2 Componentes de um sistema de controle............................ 5 1.3 Comparação
Sumário I Controle Contínuo 1 1 Introdução 3 1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada................ 5 1.2 Componentes de um sistema de controle............................ 5 1.3 Comparação
Estabilidade de sistemas de controle lineares invariantes no tempo
 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
2 Estabilidade de sistemas de controle lineares invariantes no tempo 2.1 Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no tempo.
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.10 Técnicas de Resposta em Frequência Prof. Dr. Marcos Lajovic Carneiro 10. Técnicas de Resposta de Frequência
Dinâmica de um metrónomo básico
 Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Transformadas de Laplace Engenharia Mecânica - FAENG. Prof. Josemar dos Santos
 Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
Engenharia Mecânica - FAENG SISTEMAS DE CONTROLE Prof. Josemar dos Santos Sumário Transformadas de Laplace Teorema do Valor Final; Teorema do Valor Inicial; Transformada Inversa de Laplace; Expansão em
EES-49/2012 Resolução da Prova 3. 1 Dada a seguinte função de transferência em malha aberta: ( s 10)
") EES-49/2012 Resolução da Prova 3 1 Dada a seguinte função de transferência em malha aberta: ( s 10) Gs () ss ( 10) a) Esboce o diagrama de Nyquist e analise a estabilidade do sistema em malha fechada com
EES-49/2012 Resolução da Prova 3 1 Dada a seguinte função de transferência em malha aberta: ( s 10) Gs () ss ( 10) a) Esboce o diagrama de Nyquist e analise a estabilidade do sistema em malha fechada com
Análise e Processamento de Bio-Sinais. Mestrado Integrado em Engenharia Biomédica. Sinais e Sistemas. Licenciatura em Engenharia Física
 Análise e Processamento de Bio-Sinais Mestrado Integrado em Engenharia Biomédica Licenciatura em Engenharia Física Faculdade de Ciências e Tecnologia Slide 1 Slide 1 Sobre Modelos para SLIT s Introdução
Análise e Processamento de Bio-Sinais Mestrado Integrado em Engenharia Biomédica Licenciatura em Engenharia Física Faculdade de Ciências e Tecnologia Slide 1 Slide 1 Sobre Modelos para SLIT s Introdução
ADL Sistemas de Segunda Ordem Subamortecidos
 ADL19 4.6 Sistemas de Segunda Ordem Subamortecidos Resposta ao degrau do sistema de segunda ordem genérico da Eq. (4.22). Transformada da resposta, C(s): (4.26) Expandindo-se em frações parciais, (4.27)
ADL19 4.6 Sistemas de Segunda Ordem Subamortecidos Resposta ao degrau do sistema de segunda ordem genérico da Eq. (4.22). Transformada da resposta, C(s): (4.26) Expandindo-se em frações parciais, (4.27)
Conteúdo. Definições básicas;
 Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
Resposta dinâmica. Prof. Alan Petrônio Pinheiro Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica
 Capítulo 6*: Resposta dinâmica Prof. Alan Petrônio Pinheiro Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica alanpetronio@ufu.br *Baseado no capítulo 3 do livro texto: Sistemas de Controle
Capítulo 6*: Resposta dinâmica Prof. Alan Petrônio Pinheiro Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica alanpetronio@ufu.br *Baseado no capítulo 3 do livro texto: Sistemas de Controle
Ações de controle básicas: uma análise do desempenho em regime
 Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA DIAGRAMAS DE BODE
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA 1. INTRODUÇÃO DIAGRAMAS DE BODE Para explicar os diagramas de Bode, vamos fazer, inicialmente, uma
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA 1. INTRODUÇÃO DIAGRAMAS DE BODE Para explicar os diagramas de Bode, vamos fazer, inicialmente, uma
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil. Constituídodedoisgráficos: umdomóduloemdecibel(db) outrodoângulo de fase;
 outrodoângulo de fase;") Diagramas de Bode Constituídodedoisgráficos: umdomóduloemdecibel(db) outrodoângulo de fase; Ambos são traçados em relação à frequência em escala logarítmica; LembrequeologaritmodomódulodeG(jω) é20log 10
Diagramas de Bode Constituídodedoisgráficos: umdomóduloemdecibel(db) outrodoângulo de fase; Ambos são traçados em relação à frequência em escala logarítmica; LembrequeologaritmodomódulodeG(jω) é20log 10
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
Representação e Análise de Sistemas Dinâmicos Lineares Componentes Básicos de um Sistema de Controle
 Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Sintonia de Controladores PID
 Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
II. REVISÃO DE FUNDAMENTOS
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE II. REVISÃO DE FUNDAMENTOS Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
EES-49/2012 Prova 2. Individual Duração: 100 minutos. Consulta permitida a uma página A4 com anotações pessoais e fórmulas.
 EES-49/2012 Prova 2 Individual Duração: 100 minutos Consulta permitida a uma página A4 com anotações pessoais e fórmulas. Permitido o uso de calculadora para a realização de operações básicas, incluindo
EES-49/2012 Prova 2 Individual Duração: 100 minutos Consulta permitida a uma página A4 com anotações pessoais e fórmulas. Permitido o uso de calculadora para a realização de operações básicas, incluindo
3. REPRESENTAÇÃO DE SISTEMAS
 3. REPRESENTAÇÃO DE SISTEMAS A abordagem à teoria dos sistemas, seguida até agora, partiu de alguns exemplos de sistemas físicos, determinou descrições das suas dinâmicas em termos de equações diferenciais
3. REPRESENTAÇÃO DE SISTEMAS A abordagem à teoria dos sistemas, seguida até agora, partiu de alguns exemplos de sistemas físicos, determinou descrições das suas dinâmicas em termos de equações diferenciais
Teoria de Sistemas Lineares
 Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Controle. Transformada Laplace básico
 Controle Transformada Laplace básico REQUISITOS Para perfeita compreensão do conteúdo desta aula é desejável o entendimento dos seguintes assuntos (eventualmente disponíveis em outros vídeos neste canal):
Controle Transformada Laplace básico REQUISITOS Para perfeita compreensão do conteúdo desta aula é desejável o entendimento dos seguintes assuntos (eventualmente disponíveis em outros vídeos neste canal):
Modelos de Sistemas Amostrados
 20 Modelos de Sistemas Amostrados Relógio u(kh) D/A u(t) G(s) Sistema y(t) A/D y(kh) Qual a função de transferência discreta vista pelo computador? 21 Recorde-se que, para determinar a função de transferência,
20 Modelos de Sistemas Amostrados Relógio u(kh) D/A u(t) G(s) Sistema y(t) A/D y(kh) Qual a função de transferência discreta vista pelo computador? 21 Recorde-se que, para determinar a função de transferência,
ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA
 VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
Aula 6 Transformada de Laplace
 Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes
 Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 2 de novembro de 202 Introdução
Projeto de Compensadores/Controladores pelo Diagrama de Lugar das Raízes Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 2 de novembro de 202 Introdução
PID e Lugar das Raízes
 PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
Aula 3. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Aula 3 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Marco de 2012. Resumo 1 Introdução 2 3
Sistemas lineares. Aula 7 Transformada Inversa de Laplace
 Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Dinâmica de um metrónomo básico
 Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
O critério de Nyquist
 O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
Processamento Digital de Sinais II Exercícios sobre Transformada z Data de entrega: 17/11/2015
 Processamento Digital de Sinais II Exercícios sobre Transformada z Data de entrega: 17/11/2015 1) Determine a transformada inversa de, aplicando: a) Desenvolvimento em série de potências b) Divisão direta
Processamento Digital de Sinais II Exercícios sobre Transformada z Data de entrega: 17/11/2015 1) Determine a transformada inversa de, aplicando: a) Desenvolvimento em série de potências b) Divisão direta
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO Departamento de Engenharia de Sistemas Eletrônicos PSI - EPUSP
 ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO Departamento de Engenharia de Sistemas Eletrônicos PSI - EPUSP PSI.31 LABORATÓRIO DE CIRCUITOS ELETRICOS INTRODUÇÃO TEÓRICA Edição 018 EXPERIÊNCIA 10: REDES
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO Departamento de Engenharia de Sistemas Eletrônicos PSI - EPUSP PSI.31 LABORATÓRIO DE CIRCUITOS ELETRICOS INTRODUÇÃO TEÓRICA Edição 018 EXPERIÊNCIA 10: REDES
AULA 3. CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Dinâmica de um metrónomo básico
 Modelação e Simulação 014/15 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 014/15 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
5 Descrição entrada-saída
 Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Teoria de Controle (sinopse) 5 Descrição entrada-saída J. A. M. Felippe de Souza Descrição de Sistemas Conforme a notação introduzida no capítulo 1, a função u( ) representa a entrada (ou as entradas)
Circuitos Elétricos II
 Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Ganho e Deslocamento de Fase Função de Rede (ou de Transferência) Estabilidade 1 Definições
Universidade Federal do ABC Eng. de Instrumentação, Automação e Robótica Circuitos Elétricos II José Azcue, Prof. Dr. Ganho e Deslocamento de Fase Função de Rede (ou de Transferência) Estabilidade 1 Definições
Estabilidade. Samir A. M. Martins 1. Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG
 Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis
Interna Samir A. M. Martins 1 1 UFSJ / Campus Santo Antônio, MG Brasil Programa de Pós-Graduação em Engenharia Elétrica Associação ampla entre UFSJ e CEFET MG O que nos espera? Interna 1 em sistemas multivariáveis