Funções vetoriais. I) Funções vetoriais a valores reais:
|
|
|
- Dina Zilda Aldeia Medina
- 7 Há anos
- Visualizações:
Transcrição
1 Funções vetoriais I) Funções vetoriais a valores reais: f: I R t f( n R (f 1 (,f (,...,f n () I = intervalo da reta real denominada domínio da função vetorial f = {conjunto de todos os valores possíveis de t, para os quais todas as componentes estão definidas}. Imagem f : conjunto de vetores f ( ( f1(,..., fn( ) 3 Casso particular: f: I R R t f( (f1(,f (,f3() Dom( f ) Dom( f1) Dom( f) Dom( f3) Exemplo 1: defina o domínio e a imagem da função vetorial a seguir: f: I R t f( R 3 (sin(t ),ln(4,- 1-
2 Exemplo.- Defina o domínio da função vetorial a Seguir f: I t R R f( ( t 3 1 1, 4 - t Resposta: Dom(f)={...,[-4pi,-3pi],[-pi,-pi],[0,pi]}.,- sin() Exemplo 3.- Defina o domínio e a imagem da função vetorial a Seguir f: I R R t t f( ( 3 1, t t - 4, (cos( 3) Resposta : Dom( f ) = <-,-] U [, > Ima( f ) = curva espacial, pode-se visualizar unicamente com algum programa matemático. )
3 Curva plana: dada uma função vetorial f: I R t f( R (x(, y() Tal que f 1 (=x(, f (=y(,são funções reais continuas no domínio da função vetorial f. Então o conjunto C de pontos do espaço R tais que x = f 1 (, y = f (,...(*) é chamado de curva plana. t é o parâmetro da curva, variando no domínio de f As equações (*) são denominadas equações paramétricas de C. Uma curva é a imagem de uma função vetorial a valores reais. Obs: alguns autores, denominam curva a função f, e a imagem de f de traço da curva
4 Uma curva plana é um conjunto r de pares ordenados ( f(, g( ), em que f( e g( são funções reais contínuas em um intervalo I. r( =(x(,y() é uma curva no plano R x = f( equação y = g( paramétrica Y P g y C I t f 0 x X r : I R : função vetorial associada a curva C
5 Funções vetoriais: representação gráfica Importante: A parametrização define uma orientação na curva
6 Mais exemplos... Exemplo 3. Sejam as funções vetoriais a) r( = (t,3t,0), b) r( = (+t,4t-1), c) f( = (4,, d) r( = (sin(, -cos( ), e) f(=(t, cos(); identifique no plano xy as curvas associadas a cada função vetorial. ( w) Exemplo 4: a função vetorial f ( vtrsin( w, r r cos( define uma curva plana denominada de ciclóide, v,r, w são constantes.
7 > restart; #cicloide # no programa Maple > with(plots): > v:=:w:=1:r:=: > plot( [v*t-r*sin(w*, R-R*cos(w*, t=0..5*pi], scaling=constrained, thickness=, color=blue,labels=[x,y]); cloide.htm
8 Curva espacial: dada uma função vetorial f: I R t f( n R (f 1 (,f (,...,f () Tal que f 1 (, f (,...fn( são funções reais continuas no domínio da função vetorial f. Então o conjunto C de pontos do espaço R 3 tais que x 1 = f 1 (, x = f (,x 3 = f 3 (,...xn = fn(...(*) ; n e t variando no domínio de f é chamado de curva espacial. As equações (*) são denominadas equações paramétricas de C
9 Curvas no espaço tri-dimensional R 3 Quando uma partícula se movimenta no espaço R 3, ela descreve uma curva r( denominada trajetória. r: I [ a, b] R 3 t r( (r 1 (,r (,r 3 () ( x(, y(, z( ) Exemplo 1: Uma partícula realiza um movimento mecânico no espaço R 3 de acordo a seguinte lei de movimento : f ( (4t 4, 1 t,4) Qual é a forma da trajetória no espaço R 3?
10 Exemplo.- seja as funções vetoriais seguintes a) r( = (0, 3 -t, t ), b) r(= (-1+t, 4t, +, c) r( =(cos(, -sin(,3), d) r(=(sin(, t, 4), Identifique o tipo de curva no plano xy para cada uma das funções vetoriais dadas anteriormente. Exemplo 3: seja a função vetorial definida no espaço R 3 f ( ( acos(, asin(, v Esta função define uma curva no espaço R 3, denominada de hélice. Esta trajetória é realizada por uma partícula pontual carregada dentro de um campo magnético constante
11 usando Maple > restart; #helice > with(plots): > a:=3: v:=: # dados para ajustar a curva > spacecurve( [a*cos(, a*sin(, v*t], t=0..5*pi, axes=box, labels=[x,y,z], thickness=);
12 Ciclóide Seja O : origem de coordenadas, logo as coordenadas do ponto P =(x,y) no instante t arbitrário é OB x Rt OP y R Rsin(, R cos(. ( x, y) ( Rt Rsin(, R Rcos( ) Equação paramétrica
13 Limite de funções vetoriais r ( Definição: Sejam uma curva no espaço R 3, tal que r(=(x(,y(,z() = x( i+ y( j + z( k, uma função vetorial que define Logo, dizemos que r tem limite L a medida que t se aproxima a t o e escrevemos assim: lim lim tt 0 tt 0 r( x( L l 1 (l 1,lim,l,l tt 0 3 ), y( tt 0 Desde que os limites das funções componentes existam. Definição formal : O lim tt r( L, existe se somente se 0 0 0, tal que t 0 t t r( L o l,lim z( l 3
14 Exemplo 1, Seja a função r( ( t que : lim 0 r( L (1,0) t Exemplo Seja a função, demonstra que : lim 0 r( L (0,1,) Continuidade de funções vetoriais, demonstrar Uma função vetorial r( será contínua em um ponto t=t 0, do seu domínio se a)lim b) r( t c) r( t 0 0 tt 0 ) existe ) t r( r( (x( t 0 ( t L existe ), y( t 1,t ), e 0 t,6t ),z( t 0 ) )) L,
15 Continuidade de funções vetoriais. Exemplo 1. Verifique se r( sin( i cos( j r ( é contínua em t 0 Exemplo. Verifique se a função vetorial abaixo é contínua para. t= 0 t k
16 Derivada de uma função vetorial r ( Definição: Seja uma função vetorial, ela é derivável ou tem derivada, se as derivadas das componentes x(,y(,z( estão bem definidas para todo t do domínio de r ( r'( dr dx (, dy lim Interpretação geométrica da derivada de uma função vetorial. Seja r( o vetor posição de uma partícula em movimento no espaço R 3. A função r ( é a velocidade da partícula e é um vetor tangente à trajetória espacial descrita pela partícula (para cada instante do tempo., dz ) h0 r(t r ( h) - r(, h
17 Exemplo 1: Determine a derivada da função vetorial a) f( = (t, cos(,5 b) f( = (t - 8, t e -t ) usando a definição Equação vetorial de uma reta L Seja P=(x,y,z) ϵ L, P 0 =(x 0,y 0, z 0 ) ϵ L, P 0 Z P L V é um vetor paralelo a L. Logo: L : { P P V 0 t} X V 0 Y Forma paramétrica da equação da reta L. x= x 0 + v x t Y= y o + v y t z= z 0 + v z t, sendo v = (v x,v y,v z ) // reta L
18 Regras de derivação Seja u,v funções vetoriais de variável real t; a e b são números reais, e f(,g( são funções reais de variável real t. d[ u( v( ] du( dv( 1., d[ au( ] du(. a, d[ f ( v( ] df ( dv( 3. v( f (, d[ u( v( ] du( dv( 4. v( u(, d[ u( v( ] du( dv( 5. v( u(, d[ u( f ( )] du( f ) df ( 6., df produto escalar produto vetorial
19 Exercícios Exercício 1.- Determine a velocidade v( e a aceleração a( de uma partícula que descreva a seguinte curva (trajetória) r(=(t, 8-3t,3t+)m, determine o ângulo entre eles no instante t=s. Exercício.- Seja uma partícula pontual que segue uma trajetória dada pela curva, : IR definida assim: α:t α( (vt-rsin(w,r-rcos(w), R, w, V são constantes. R =,w = 1, v = R.w =. a) Determine a posição, velocidade e aceleração no instante t=0s, e t=π/. b) Determine a equação da reta tangente a curva α no instante t=π/. Exercício 3.-Demonstre a propriedade 4 e 6 da regra de derivação.
20 Exercício 4.- Determine o limite da função vetorial t quando t se aproxima a t 0 =0. e f ( ( 1, t t 1 1, t t 4 ) Exercício 5.- estude a continuidade da função vetorial ( t, t 1), t 0, f ( (0,1), t 0. Exercício 6.-Seja f(=(t+3, t + 4 determine f ( para todo t ϵ R. Qual é o ângulo que forma o vetor f ( como o vetor f( no instante t=1.? Exercício 7.- Sejam as funções vetoriais v(=(t, cos(, t ), w(=(5, t, sin(). Determine a primeira derivada dos vetores A( = V(. W(, e B( = v( X w(; produto escalar e produto vetorial respectivamente.
21 Integral de uma função vetorial Seja r( =(x(,y(,z() uma função vetorial, definição: se as componentes de f são integráveis sobre I=[a,b],então b a b a r( lim b r( ( x( ) i ( y( ) j ( a n in i1 r( t *) t, t z( ) k Exemplo 1.- Calcular a integral f ( a) b) f ( ( cos(t ), t b a i 1 ) b a, ti* partiçãode n da função Exemplo.- Determine a integral da função vetorial f(= ( e - t + t, cosh(, sinh( ) entre t=0 e t=1. b a f ( ( sin(, ln( t )) I
22 Comprimento de arco para curvas lisas Dado uma superfície arbitraria, o comprimento de arco é o comprimento da curva entre dois pontos da superfície. Por exemplo, quando uma partícula percorre uma determinada trajetória no espaço, ela descreve uma curva, o comprimento desta curva entre dois instantes dado t 0 e t 1 se denomina comprimento de arco. Comprimento de arco D dl dx dy L b a ( dx) ( dy) b a 1 ( dy dx ) dx
23 Comprimento de arco no espaço R 3 Definição: O comprimento L de uma curva lisa e parametrizada 3D : r( = x( i + y( j + z( k, tal que t ϵ [a,b] é v L L b a b a dr ds ( b a dx ) dx dy ( ) dy dz dz ( ) b a dr dr( ( vx, vy, vz ) v( r ( : velocidade Algumas notações usuais L b a b v( v( a b a r'( v( é o modulo ou norma do vetor v(
24 Exemplo 1.- Seja a função vetorial r(=(+t, 4+t, -+, determine o comprimento de arco entre os valores t=1 a t=4. Exemplo.- Determine o perímetro de uma circunferência centrada no ponto (1,) e radio R=3 Exemplo 3.- Determine o comprimento de arco da ciclóide r( = (t - sin(, - cos() entre t=0 e t= π y 0 4 x
25 s( S: FUNÇÃO COMPRIMENTO DE ARCO t t0 dr t t0 v( s( é o comprimento da curva r( desde o instante t=0 ate o instante t. Sendo v( o módulo da velocidade, ou chamada também como velocidade escalar. Usando um pouco de cálculo ds v( Importante: O comprimento de arco de uma curva arbitrária não depende da parametrização.
26 L t1 dr ( t0 w1 w0 dr dw dw O comprimento de arco de uma curva entre dois pontos é invariante pela re-parametrização Exercícios 1.-Determine a função comprimento de arco s( para a ciclóide do exemplo 3..-Determine a função comprimento de arco da curva parametrizada r(=( 3 cos(, 3sin() 3.-Determine a função comprimento de arco da curva Parametrizada r(=( 3cos(, 3sin(,, 4,- Determine o domínio, imagem e o a função comprimento de arco para a função r(=(cos(,sin(,3).
27 TRAJETÓRIA DE UMA PARTÍCULA EM CAMPOS ELÉTRICOS E MAGNÉTICOS
28 Movimento de uma partícula no espaço R 3 Uma partícula no espaço R 3 descreve uma trajetória de acordo a uma certa lei de movimento que define a posição dela para cada instante do tempo t. Esta lei de movimento está definida por uma função vetorial: r( x( i y( j z( k r(: vetor posição da partícula em relação a certo sistema de referencia. Obs: A lei de movimento é deduzida a partir das leis de movimento da mecânica clássica= leis de Newton
29 Sabemos que A ultima relação. dt. T 0 T V V V v, T.T 1, derivando Analisemos a velocidade de uma partícula V ( T. v Derivando esta equação temos a a T t v dt Definamos : ds K Lembre que s=s(, s é função comprimento de arco. dt ds
30 Considere : dt dt K, ds ds de T.T Finalmente 1, Curvatura K temos dt ds dt ds N. T, considerando o radio de curvatura 0 a a T t Sendo v N N vetor unitário dt Logo deve ser ortogonal a T, seu vetor unitário também ds T N T T(s), logo definimos a curvatura K 1 k
31 a Aceleração instantânea a T dv a T a T T Aceleração tangencial acpta v N Suponhamos que : r r(s) ( dx ds Aceleração centrípeta ou radial sempre orientada á parte côncava da trajetória., dy ds, dz ds, definamos ) dr ds s: função comprimento de arco.
32 ( dx ds ) ( dy ds ) ( dz ds ) 1 Logo T Como : dt d dr d r K ( ) ds ds ds ds então, em forma explicita K ( d ds x ) ( d ds y ) ( d ds z )
33 Triedro de Frenet-Serret B T N Vetor binormal Exercícios 1.- Provar que.- Provar que B 1 av. av. a T V v 3.- Provar que K V 3 v a
34 Torção de curvas espaciais Consideremos uma partícula descrevendo uma curva, como se comporta o vetor bi-normal B em relação a função comprimento de arco s? B T N Como : podemos derivar em relação a s db dn dt T N, como dt dt logo ds ds ds N // N 0 ds db dn T db B. B 1,. B 0 ds ds ds db db db db T, B // N N ds ds ds ds ds, então finalmente N. db ds
35 Equações de Frenet Conforme uma partícula se move no espaço, os vetores T,N,B se movem junto com a partícula ao longo da trajetória (curva). Então vale perguntar qual é a rapidez da mudança destes vetores em relação ao parâmetro comprimento de arco s dt ds db ds dn ds k N...(1) k T N...() B...(3) provar!
36 Exercícios Exemplo 1.- Seja uma partícula que descreve uma circunferência de radio R=1, centralizada na origem de coordenadas de acordo a lei de movimento r( = (Rcos(, R sin( ). a) Determine o vetor T,N para todo instante do tempo. b) Determine a curvatura, a aceleração centrípeta, a Acerelação tangencial. c) Determine o vetor binormal B para todo instante do tempo t. Exemplo : Determine a curvatura e a torção de uma helicóide : r( ( Rcos(, Rsen(, V Para todo instante t, sendo R e V constantes arbitrarias.
37 Exercícios 1.- Em relação á ciclóide estudada anteriormente α:t α( (vt-rsin(w,r-rcos(w), sendo R, w, V são constantes. R =,w = 1, v = R.w =. a) Determine o vetor T, N,B para a ciclóide no instante t=π/. b) Determine a aceleração tangencial e a aceleração centrípeta para todo instante t. Particularize para t=π/ c) Determine a curvatura K( para todo instante de tempo. d) Seja uma partícula sinalizada na borda da roda que realiza rolamento sem deslizamento.sabemos que esta partícula descreve uma trajetória em forma de. Provar que no instante t, a velocidade V da partícula é sempre ortogonal ao radio vetor que une a partícula ao ponto mais baixo da roda.
38 Exercícios.. Continua.- Seja uma partícula descrevendo uma hélice r(=(cos(, sen(,4 no espaço R 3 a) Determine a velocidade e a aceleração instantânea para todo instante t. b) Determine o vetor unitário tangente T, para todo instante t. c) Determine a equação da reta tangente a helicóide no Instante t=π/4. d) Determine a função comprimento de arco s( em função do tempo t. e) Determine a aceleração tangencial e a aceleração centrípeta para todo instante t. Particularize para t=π/4.

39 Exercícios.. Continua f).- Determine os vetores N e B para todo instante t
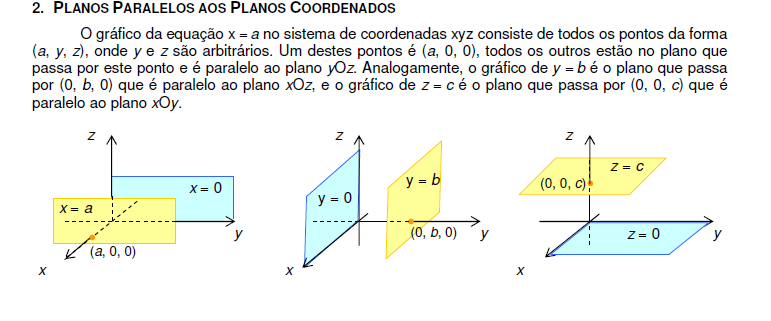
40 Equação de um plano. Seja um plano M imerso no espaço euclidiano R 3 onde n é um vetor perpendicular ao plano M, então conhecendo um ponto P o =(x o,y o,z o ) que pertence ao plano P, podemos determinar a equação algébrica que obedece todos os pontos (x,y,z) do plano M. Basicamente, ela disse que toda reta contida no plano (ou todo vetor contido no plano), é perpendicular ao vetor normal n. dado n=(a,b,c) n. P o P 0 (O produto escalar entre n e P 0 P é nulo) Seja P=(x,y,z) um ponto arbitrario do plano M

41 Equação de um plano. ax by cz d 0 Onde a constante d pode se achar avaliando a equação em qualquer ponto que pertence ao plano.
42
43
44
45
46
47 Interseção de dois planos n 1 =(a 1,b 1,c 1 ) n =(a,b,c ) cos( ) n n 1 1. n n n 1. n a1a 1 b1b c1c
48 Exercícios. Exercício 1.- Seja M um plano paralelo ao plano xy localizada a uma distancia c da origem de coordenadas. Determine a equação deste plano. Exercício.-Encontre a distancia do ponto Q=(1,,1) ao plano M com equação x+y+z=6 Exercício 3.- Seja os planos M 1 : 3x+y+z+4=0, M : z=0, a) Determine o ângulo entre estes planos b) Determine a equação da reta proveniente da interseção dos dois planos. Site recomendado para entender melhor a geometria euclidiana eana.htm
Funções vetoriais. I) Funções vetoriais a valores reais:
 Funções vetoriais a valores reais:") Funções veoriais I) Funções veoriais a valores reais: f: I R f() R (f 1 n (), f (),..., f n ()) I = inervalo da rea real denominada domínio da função veorial f = {conjuno de odos os valores possíveis de,
Funções veoriais I) Funções veoriais a valores reais: f: I R f() R (f 1 n (), f (),..., f n ()) I = inervalo da rea real denominada domínio da função veorial f = {conjuno de odos os valores possíveis de,
Vetor Tangente, Normal e Binormal. T(t) = r (t)
 = r (t)") CVE 0003 - - CÁLCULO VETORIAL - - 2011/2 Vetor Tangente, Normal e Binormal Lembre-se que se C é uma curva suave dada pela função vetorial r(t), então r (t) é contínua e r (t) 0. Além disso, o vetor r (t)
CVE 0003 - - CÁLCULO VETORIAL - - 2011/2 Vetor Tangente, Normal e Binormal Lembre-se que se C é uma curva suave dada pela função vetorial r(t), então r (t) é contínua e r (t) 0. Além disso, o vetor r (t)
Lista de Exercícios de Cálculo 3 Terceira Semana
 Lista de Exercícios de Cálculo 3 Terceira Semana Parte A 1. Reparametrize as curvas pelo parâmetro comprimento de arco medido a partir do ponto t = 0 na direção crescente de t. (a) r(t) = ti + (1 3t)j
Lista de Exercícios de Cálculo 3 Terceira Semana Parte A 1. Reparametrize as curvas pelo parâmetro comprimento de arco medido a partir do ponto t = 0 na direção crescente de t. (a) r(t) = ti + (1 3t)j
Funções vetoriais. I) Funções vetoriais a valores reais:
 Funções vetoriais a valores reais:") Funções vetoiais I) Funções vetoiais a valoes eais: f: I R R t a f(t) (f 1 n (t), f (t),..., f n (t)) I intevalo da eta eal denominada domínio da função vetoial f {conjunto de todos os valoes possíveis
Funções vetoiais I) Funções vetoiais a valoes eais: f: I R R t a f(t) (f 1 n (t), f (t),..., f n (t)) I intevalo da eta eal denominada domínio da função vetoial f {conjunto de todos os valoes possíveis
Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA
 Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA 1. Funções Vetoriais Até agora nos cursos de Cálculo só tratamos de funções cujas imagens estavam em R. Essas funções são chamadas de funções com valores
Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA 1. Funções Vetoriais Até agora nos cursos de Cálculo só tratamos de funções cujas imagens estavam em R. Essas funções são chamadas de funções com valores
O Triedro de Frenet. MAT Cálculo Diferencial e Integral II Daniel Victor Tausk
 O Triedro de Frenet MAT 2454 - Cálculo Diferencial e Integral II Daniel Victor Tausk Seja γ : I IR 3 uma curva de classe C 3 definida num intervalo I IR. Assuma que γ é regular, ou seja, γ (t) 0 para todo
O Triedro de Frenet MAT 2454 - Cálculo Diferencial e Integral II Daniel Victor Tausk Seja γ : I IR 3 uma curva de classe C 3 definida num intervalo I IR. Assuma que γ é regular, ou seja, γ (t) 0 para todo
9 AULA. Curvas Espaciais LIVRO. META Estudar as curvas no espaço (R 3 ). OBJETIVOS Descrever o movimento de objetos no espaço.
. OBJETIVOS Descrever o movimento de objetos no espaço.") 1 LIVRO Curvas Espaciais META Estudar as curvas no espaço (R 3 ). OBJETIVOS Descrever o movimento de objetos no espaço. PRÉ-REQUISITOS Funções vetoriais (Aula 08). Curvas Espaciais.1 Introdução Na aula
1 LIVRO Curvas Espaciais META Estudar as curvas no espaço (R 3 ). OBJETIVOS Descrever o movimento de objetos no espaço. PRÉ-REQUISITOS Funções vetoriais (Aula 08). Curvas Espaciais.1 Introdução Na aula
Lista de Exercícios 1
 UFS - PROMAT Disciplina: Geometria Diferencial Professor: Almir Rogério Silva Santos Lista de Exercícios. Seja α : I R 3 uma curva regular. (a) Mostre que α é uma reta se α (t) e α (t) são linearmente
UFS - PROMAT Disciplina: Geometria Diferencial Professor: Almir Rogério Silva Santos Lista de Exercícios. Seja α : I R 3 uma curva regular. (a) Mostre que α é uma reta se α (t) e α (t) são linearmente
MAT1153 / LISTA DE EXERCÍCIOS : CAMPOS CONSERVATIVOS, INTEGRAIS DE LINHA, TRABALHO E TEOREMA DE GREEN
 MAT1153 / 2008.1 LISTA DE EXERCÍCIOS : CAMPOS CONSERVATIVOS, INTEGRAIS DE LINHA, TRABALHO E TEOREMA DE GREEN OBS: Faça os exercícios sobre campos conservativos em primeiro lugar. (1 Fazer exercícios 1:(c,
MAT1153 / 2008.1 LISTA DE EXERCÍCIOS : CAMPOS CONSERVATIVOS, INTEGRAIS DE LINHA, TRABALHO E TEOREMA DE GREEN OBS: Faça os exercícios sobre campos conservativos em primeiro lugar. (1 Fazer exercícios 1:(c,
Cinemática em 2D e 3D
 Cinemática em 2D e 3D o vetores posição, velocidade e aceleração o movimento com aceleração constante, movimento de projéteis o Cinemática rotacional, movimento circular uniforme Movimento 2D e 3D Localizar
Cinemática em 2D e 3D o vetores posição, velocidade e aceleração o movimento com aceleração constante, movimento de projéteis o Cinemática rotacional, movimento circular uniforme Movimento 2D e 3D Localizar
Aula 6. Doravante iremos dizer que r(t) é uma parametrização da curva, e t é o parâmetro usado para descrever a curva.
 é uma parametrização da curva, e t é o parâmetro usado para descrever a curva.") Curvas ou Funções Vetoriais: Aula 6 Exemplo 1. Círculo como coleção de vetores. Vetor posição de curva: r(t) = (cos t, sen t), t 2π r(t) pode ser vista como uma função vetorial: r : [, 2π] R R 2 Doravante
Curvas ou Funções Vetoriais: Aula 6 Exemplo 1. Círculo como coleção de vetores. Vetor posição de curva: r(t) = (cos t, sen t), t 2π r(t) pode ser vista como uma função vetorial: r : [, 2π] R R 2 Doravante
2 Propriedades geométricas de curvas parametrizadas no R 4
 2 Propriedades geométricas de curvas parametrizadas no R 4 Nesse capítulo trataremos dos conceitos básicos de geometria diferencial referentes à curvas parametrizadas no R 4. 2.1 Curvas Parametrizadas
2 Propriedades geométricas de curvas parametrizadas no R 4 Nesse capítulo trataremos dos conceitos básicos de geometria diferencial referentes à curvas parametrizadas no R 4. 2.1 Curvas Parametrizadas
Operadores Diferenciais Aplicações Rebello 2014
 Operadores Diferenciais Aplicações Rebello 2014 Os operadores diferenciais representam um conjunto de ferramentas indispensáveis na engenharia não só na parte de avaliar e classificar um campo vetorial
Operadores Diferenciais Aplicações Rebello 2014 Os operadores diferenciais representam um conjunto de ferramentas indispensáveis na engenharia não só na parte de avaliar e classificar um campo vetorial
MOVIMENTO EM DUAS E TRÊS DIMENSÕES
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: MECÂNICA E TERMODINÂMICA MOVIMENTO EM DUAS E TRÊS DIMENSÕES Prof. Bruno Farias Introdução Neste módulo
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: MECÂNICA E TERMODINÂMICA MOVIMENTO EM DUAS E TRÊS DIMENSÕES Prof. Bruno Farias Introdução Neste módulo
Retas e planos no espaço
 Retas e planos no espaço Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Retas e Segmentos de Reta no Espaço 2 Equação vetorial
Retas e planos no espaço Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Retas e Segmentos de Reta no Espaço 2 Equação vetorial
Cálculo a Várias Variáveis I - MAT Cronograma para P2: aulas teóricas (segundas e quartas)
") Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Mecânica 1. Guia de Estudos P2
 Mecânica 1 Guia de Estudos P2 Conceitos 1. Cinemática do Ponto Material 2. Cinemática dos Sólidos 1. Cinemática do Ponto Material a. Curvas Definição algébrica: A curva parametriza uma função de duas ou
Mecânica 1 Guia de Estudos P2 Conceitos 1. Cinemática do Ponto Material 2. Cinemática dos Sólidos 1. Cinemática do Ponto Material a. Curvas Definição algébrica: A curva parametriza uma função de duas ou
11.5 Derivada Direcional, Vetor Gradiente e Planos Tangentes
 11.5 Derivada Direcional, Vetor Gradiente e Planos Tangentes Luiza Amalia Pinto Cantão Depto. de Engenharia Ambiental Universidade Estadual Paulista UNESP luiza@sorocaba.unesp.br Estudos Anteriores Derivadas
11.5 Derivada Direcional, Vetor Gradiente e Planos Tangentes Luiza Amalia Pinto Cantão Depto. de Engenharia Ambiental Universidade Estadual Paulista UNESP luiza@sorocaba.unesp.br Estudos Anteriores Derivadas
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
Universidade Estadual de Montes Claros Departamento de Ciências Exatas Curso de Licenciatura em Matemática. Notas de Aulas de
 Universidade Estadual de Montes Claros Departamento de Ciências Exatas Curso de Licenciatura em Matemática Notas de Aulas de Cálculo Rosivaldo Antonio Gonçalves Notas de aulas que foram elaboradas para
Universidade Estadual de Montes Claros Departamento de Ciências Exatas Curso de Licenciatura em Matemática Notas de Aulas de Cálculo Rosivaldo Antonio Gonçalves Notas de aulas que foram elaboradas para
Dinâmica do Movimento dos Corpos CINEMÁTICA VETORIAL5. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 CINEMÁTICA VETORIAL5 Gil da Costa Marques 5.1 Referenciais 5. Vetores e Referenciais Cartesianos 5.3 Referenciais Gerais 5.4 Vetores em Coordenadas Polares 5.5 Vetores Velocidade e Aceleração em coordenadas
CINEMÁTICA VETORIAL5 Gil da Costa Marques 5.1 Referenciais 5. Vetores e Referenciais Cartesianos 5.3 Referenciais Gerais 5.4 Vetores em Coordenadas Polares 5.5 Vetores Velocidade e Aceleração em coordenadas
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
Translação e Rotação Energia cinética de rotação Momentum de Inércia Torque. Física Geral I ( ) - Capítulo 07. I. Paulino*
 - Capítulo 07. I. Paulino*") ROTAÇÃO Física Geral I (1108030) - Capítulo 07 I. Paulino* *UAF/CCT/UFCG - Brasil 2012.2 1 / 25 Translação e Rotação Sumário Definições, variáveis da rotação e notação vetorial Rotação com aceleração angular
ROTAÇÃO Física Geral I (1108030) - Capítulo 07 I. Paulino* *UAF/CCT/UFCG - Brasil 2012.2 1 / 25 Translação e Rotação Sumário Definições, variáveis da rotação e notação vetorial Rotação com aceleração angular
Universidade Federal da Bahia
 Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA3 - CÁLCULO B UNIDADE II - LISTA DE EXERCÍCIOS Atualiada 13.1 Coordenadas Polares [1] Dados os pontos P 1 (3, 5π 3 ), P ( 3, 33 ),
Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA3 - CÁLCULO B UNIDADE II - LISTA DE EXERCÍCIOS Atualiada 13.1 Coordenadas Polares [1] Dados os pontos P 1 (3, 5π 3 ), P ( 3, 33 ),
A Derivada. Derivadas Aula 16. Alexandre Nolasco de Carvalho Universidade de São Paulo São Carlos SP, Brazil
 Derivadas Aula 16 Alexandre Nolasco de Carvalho Universidade de São Paulo São Carlos SP, Brazil 04 de Abril de 2014 Primeiro Semestre de 2014 Turma 2014104 - Engenharia Mecânica A Derivada Seja x = f(t)
Derivadas Aula 16 Alexandre Nolasco de Carvalho Universidade de São Paulo São Carlos SP, Brazil 04 de Abril de 2014 Primeiro Semestre de 2014 Turma 2014104 - Engenharia Mecânica A Derivada Seja x = f(t)
Diferenciabilidade de funções reais de várias variáveis reais
 Diferenciabilidade de funções reais de várias variáveis reais Cálculo II Departamento de Matemática Universidade de Aveiro 2018-2019 Cálculo II 2018-2019 Diferenciabilidade de f.r.v.v.r. 1 / 1 Derivadas
Diferenciabilidade de funções reais de várias variáveis reais Cálculo II Departamento de Matemática Universidade de Aveiro 2018-2019 Cálculo II 2018-2019 Diferenciabilidade de f.r.v.v.r. 1 / 1 Derivadas
MAT Cálculo Diferencial e Integral para Engenharia III 2a. Lista de Exercícios - 1o. semestre de 2014
 MAT455 - Cálculo Diferencial e Integral para Engenharia III a. Lista de Exercícios - 1o. semestre de 014 1. Calcule as seguintes integrais de linha ao longo da curva indicada: x ds, (t) = (t 3, t), 0 t
MAT455 - Cálculo Diferencial e Integral para Engenharia III a. Lista de Exercícios - 1o. semestre de 014 1. Calcule as seguintes integrais de linha ao longo da curva indicada: x ds, (t) = (t 3, t), 0 t
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma C /2 Prova da área I
 UFRGS - INSTITUTO DE MATEMÁTIA Departamento de Matemática Pura e Aplicada MAT068 - Turma - 07/ Prova da área I -6 7 8 Total Nome: artão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
UFRGS - INSTITUTO DE MATEMÁTIA Departamento de Matemática Pura e Aplicada MAT068 - Turma - 07/ Prova da área I -6 7 8 Total Nome: artão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
Sistema de Coordenadas Intrínsecas
 Sistema de Coordenadas Intrínsecas Emílio G. F. Mercuri a a Professor do Departamento de Engenharia Ambiental, Universidade Federal do Paraná, Curitiba, Paraná Resumo Depois da introdução a cinemática
Sistema de Coordenadas Intrínsecas Emílio G. F. Mercuri a a Professor do Departamento de Engenharia Ambiental, Universidade Federal do Paraná, Curitiba, Paraná Resumo Depois da introdução a cinemática
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma A /1 Prova da área I
 UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT01168 - Turma A - 019/1 Prova da área I 1-6 7 8 Total Nome: Ponto extra: ( )Wikipédia ( )Apresentação ( )Nenhum Tópico: Cartão:
UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT01168 - Turma A - 019/1 Prova da área I 1-6 7 8 Total Nome: Ponto extra: ( )Wikipédia ( )Apresentação ( )Nenhum Tópico: Cartão:
Funções Vetoriais. Copyright Cengage Learning. Todos os direitos reservados.
 13 Funções Vetoriais Copyright Cengage Learning. Todos os direitos reservados. 1 13.4 Movimento no Espaço: Velocidade e Aceleração Copyright Cengage Learning. Todos os direitos reservados. Movimento no
13 Funções Vetoriais Copyright Cengage Learning. Todos os direitos reservados. 1 13.4 Movimento no Espaço: Velocidade e Aceleração Copyright Cengage Learning. Todos os direitos reservados. Movimento no
Aula 15. Derivadas Direcionais e Vetor Gradiente. Quando u = (1, 0) ou u = (0, 1), obtemos as derivadas parciais em relação a x ou y, respectivamente.
 ou u = (0, 1), obtemos as derivadas parciais em relação a x ou y, respectivamente.") Aula 15 Derivadas Direcionais e Vetor Gradiente Seja f(x, y) uma função de variáveis. Iremos usar a notação D u f(x 0, y 0 ) para: Derivada direcional de f no ponto (x 0, y 0 ), na direção do vetor unitário
Aula 15 Derivadas Direcionais e Vetor Gradiente Seja f(x, y) uma função de variáveis. Iremos usar a notação D u f(x 0, y 0 ) para: Derivada direcional de f no ponto (x 0, y 0 ), na direção do vetor unitário
denomina-se norma do vetor (x 1,..., x n ). (Desigualdade de Schwarz) Quaisquer que sejam os vetores u e v de R n, tem-se
. (Desigualdade de Schwarz) Quaisquer que sejam os vetores u e v de R n, tem-se") Teoria FUNÇÕES VETORIAIS Geometria do Espaço R n : O espaço R n é um espaço vetorial sobre R com as operações de soma e multiplicação por escalar definidas coordenada a coordenada. O número (x 1,..., x
Teoria FUNÇÕES VETORIAIS Geometria do Espaço R n : O espaço R n é um espaço vetorial sobre R com as operações de soma e multiplicação por escalar definidas coordenada a coordenada. O número (x 1,..., x
Vectores e Geometria Analítica
 Capítulo 1 Vectores e Geometria Analítica 1.1 Vectores em R 2 e R 3. Exercício 1.1.1 Determine um vector unitário que tenha a mesma direcção e sentido que o vector u e outro que que tenha sentido contrário
Capítulo 1 Vectores e Geometria Analítica 1.1 Vectores em R 2 e R 3. Exercício 1.1.1 Determine um vector unitário que tenha a mesma direcção e sentido que o vector u e outro que que tenha sentido contrário
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma A /2 Prova da área I
 UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT01168 - Turma A - 017/ Prova da área I 1-6 7 8 Total Nome: Cartão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT01168 - Turma A - 017/ Prova da área I 1-6 7 8 Total Nome: Cartão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
Nome:... Q N Assinatura:... 1 RG:... 2 N o USP:... 3 Turma: Teórica... 4 Professor: Edson Vargas... Total
 1 a Prova de MAT036 - Geometria Diferencial I IME - 9/09/016 Nome:................................................... Q N Assinatura:............................................... 1 RG:......................................................
1 a Prova de MAT036 - Geometria Diferencial I IME - 9/09/016 Nome:................................................... Q N Assinatura:............................................... 1 RG:......................................................
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma A /1 Prova da área I
 UFRG - INTITUTO DE MTEMÁTIC Departamento de Matemática Pura e plicada MT1168 - Turma - 19/1 Prova da área I 1-6 7 8 Total Nome: Ponto extra: ( )Wikipédia ( )presentação ( )Nenhum Tópico: Cartão: Regras
UFRG - INTITUTO DE MTEMÁTIC Departamento de Matemática Pura e plicada MT1168 - Turma - 19/1 Prova da área I 1-6 7 8 Total Nome: Ponto extra: ( )Wikipédia ( )presentação ( )Nenhum Tópico: Cartão: Regras
Geometria Analítica II - Aula 7 178
 Geometria Analítica II - Aula 7 178 Aula 8 Superfícies Regradas Dizemos que uma superfície S é regrada quando por todo ponto P pertencente a S passa pelo menos uma reta r P inteiramente contida em S. Fig.
Geometria Analítica II - Aula 7 178 Aula 8 Superfícies Regradas Dizemos que uma superfície S é regrada quando por todo ponto P pertencente a S passa pelo menos uma reta r P inteiramente contida em S. Fig.
MAT Lista de exercícios
 1 Curvas no R n 1. Esboce a imagem das seguintes curvas para t R a) γ(t) = (1, t) b) γ(t) = (t, cos(t)) c) γ(t) = (t, t ) d) γ(t) = (cos(t), sen(t), 2t) e) γ(t) = (t, 2t, 3t) f) γ(t) = ( 2 cos(t), 2sen(t))
1 Curvas no R n 1. Esboce a imagem das seguintes curvas para t R a) γ(t) = (1, t) b) γ(t) = (t, cos(t)) c) γ(t) = (t, t ) d) γ(t) = (cos(t), sen(t), 2t) e) γ(t) = (t, 2t, 3t) f) γ(t) = ( 2 cos(t), 2sen(t))
Nome: Gabarito Data: 28/10/2015. Questão 01. Calcule a derivada da função f(x) = sen x pela definição e confirme o resultado
 = sen x pela definição e confirme o resultado") Fundação Universidade Federal de Pelotas Departamento de Matemática e Estatística Curso de Licenciatura em Matemática - Diurno Segunda Prova de Cálculo I Prof. Dr. Maurício Zan Nome: Gabarito Data: 8/0/05.
Fundação Universidade Federal de Pelotas Departamento de Matemática e Estatística Curso de Licenciatura em Matemática - Diurno Segunda Prova de Cálculo I Prof. Dr. Maurício Zan Nome: Gabarito Data: 8/0/05.
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO
 INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-454 Cálculo Diferencial e Integral II (Escola Politécnica) Primeira Lista de Exercícios - Professor: Equipe de Professores BONS ESTUDOS!.
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-454 Cálculo Diferencial e Integral II (Escola Politécnica) Primeira Lista de Exercícios - Professor: Equipe de Professores BONS ESTUDOS!.
Aula 31 Funções vetoriais de uma variável real
 MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
Lista 3. Cálculo Vetorial. Integrais de Linha e o Teorema de Green. 3 Calcule. 4 Calcule. a) F(x, y, z) = yzi + xzj + xyk
 F(x, y, z) = yzi + xzj + xyk") Lista 3 Cálculo Vetorial Integrais de Linha e o Teorema de Green Parametrizações Encontre uma parametrização apropriada para a curva suave por partes em R 3. a) intersecção do plano z = 3 com o cilindro
Lista 3 Cálculo Vetorial Integrais de Linha e o Teorema de Green Parametrizações Encontre uma parametrização apropriada para a curva suave por partes em R 3. a) intersecção do plano z = 3 com o cilindro
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III
 UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
Luis Fernando Coelho Amaral UNIVERSIDADE FEDERAL DO MARANHÃO. Análise Vetorial. α Rot div
 Luis Fernando Coelho Amaral UNIVERSIDADE FEDERAL DO MARANHÃO Análise Vetorial α Rot div Luís Fernando Coelho Amaral Análise Vetorial Universidade Federal do Maranhão 1 Luís Fernando Coelho Amaral À minha
Luis Fernando Coelho Amaral UNIVERSIDADE FEDERAL DO MARANHÃO Análise Vetorial α Rot div Luís Fernando Coelho Amaral Análise Vetorial Universidade Federal do Maranhão 1 Luís Fernando Coelho Amaral À minha
UNIVERSIDADE ESTADUAL DE SANTA CRUZ UESC. 1 a Avaliação escrita de Cálculo IV Professor: Afonso Henriques Data: 10/04/2008
 1 a Avaliação escrita de Professor: Afonso Henriques Data: 10/04/008 1. Seja R a região do plano delimitada pelos gráficos de y = x, y = 3x 18 e y = 0. Se f é continua em R, exprima f ( x, y) da em termos
1 a Avaliação escrita de Professor: Afonso Henriques Data: 10/04/008 1. Seja R a região do plano delimitada pelos gráficos de y = x, y = 3x 18 e y = 0. Se f é continua em R, exprima f ( x, y) da em termos
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma A /1 Prova da área I
 UFRG - INTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT01168 - Turma A - 2018/1 Prova da área I 1-6 7 8 Total Nome: Cartão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
UFRG - INTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT01168 - Turma A - 2018/1 Prova da área I 1-6 7 8 Total Nome: Cartão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
Derivadas. Slides de apoio sobre Derivadas. Prof. Ronaldo Carlotto Batista. 21 de outubro de 2013
 Cálculo 1 ECT1113 Slides de apoio sobre Derivadas Prof. Ronaldo Carlotto Batista 21 de outubro de 2013 AVISO IMPORTANTE Estes slides foram criados como material de apoio às aulas e não devem ser utilizados
Cálculo 1 ECT1113 Slides de apoio sobre Derivadas Prof. Ronaldo Carlotto Batista 21 de outubro de 2013 AVISO IMPORTANTE Estes slides foram criados como material de apoio às aulas e não devem ser utilizados
TÓPICO. Fundamentos da Matemática II INTRODUÇÃO AO CÁLCULO VETORIAL. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 INTRODUÇÃO AO CÁLCULO VETORIAL Gil da Costa Marques TÓPICO Fundamentos da Matemática II.1 Introdução. Funções vetoriais de uma variável. Domínio e conjunto imagem.4 Limites de funções vetoriais de uma
INTRODUÇÃO AO CÁLCULO VETORIAL Gil da Costa Marques TÓPICO Fundamentos da Matemática II.1 Introdução. Funções vetoriais de uma variável. Domínio e conjunto imagem.4 Limites de funções vetoriais de uma
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
APLICAÇÕES DAS FÓRMULAS DE FRENET EM CURVAS PLANAS E ESFÉRICAS
 APLICAÇÕES DAS FÓRMULAS DE FRENET EM CURVAS PLANAS E ESFÉRICAS Adailson Ribeiro da Silva; Carlos Rhamon Batista Morais; Alecio Soares Silva; José Elias da Silva Universidade Estadual da Paraíba; adailsonribeiro1@gmail.com;
APLICAÇÕES DAS FÓRMULAS DE FRENET EM CURVAS PLANAS E ESFÉRICAS Adailson Ribeiro da Silva; Carlos Rhamon Batista Morais; Alecio Soares Silva; José Elias da Silva Universidade Estadual da Paraíba; adailsonribeiro1@gmail.com;
UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA
 1 UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA 1 a Lista de exercícios MAT 41 - Cálculo III - 01/II Coordenadas no espaço 1. Determinar o lugar geométrico
1 UNIVERSIDADE FEDERAL DE VIÇOSA CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS DEPARTAMENTO DE MATEMÁTICA 1 a Lista de exercícios MAT 41 - Cálculo III - 01/II Coordenadas no espaço 1. Determinar o lugar geométrico
1 R n, propriedades, topologia
 1 R n, propriedades, topologia Lembrete: Dados dois conjuntos A, B é dito produto cartesiano de A com B o conjunto A B = {(a, b) : a A, b B}. Em particular, R R = R 2 = {(x, y) : x, y R}: podemos representar
1 R n, propriedades, topologia Lembrete: Dados dois conjuntos A, B é dito produto cartesiano de A com B o conjunto A B = {(a, b) : a A, b B}. Em particular, R R = R 2 = {(x, y) : x, y R}: podemos representar
Cálculo Diferencial e Integral II
 Instituto Superior Técnico Departamento de Matemática Secção de Álgebra e Análise Cálculo Diferencial e Integral II Ficha de trabalho 1 (versão de 6/0/009 (Esboço de Conjuntos. Topologia. Limites. Continuidade
Instituto Superior Técnico Departamento de Matemática Secção de Álgebra e Análise Cálculo Diferencial e Integral II Ficha de trabalho 1 (versão de 6/0/009 (Esboço de Conjuntos. Topologia. Limites. Continuidade
LISTA 6 DE GEOMETRIA DIFERENCIAL 2008
 LISTA 6 DE GEOMETRIA DIFERENCIAL 2008 RICARDO SA EARP (1) Considere a esfera unitária S 2 = {x 2 + y 2 + z 2 = 1} em R 3. (a) Mostre que a projeção estereográfica usual do pólo norte é dada por Π N (x,
LISTA 6 DE GEOMETRIA DIFERENCIAL 2008 RICARDO SA EARP (1) Considere a esfera unitária S 2 = {x 2 + y 2 + z 2 = 1} em R 3. (a) Mostre que a projeção estereográfica usual do pólo norte é dada por Π N (x,
x n+1 = 1 2 x n (2 valores) Considere a equação recursiva no modelo de Fisher, Wright e Haldane
 Considere a equação recursiva no modelo de Fisher, Wright e Haldane") .9.8.7.6.5.4.3.2.1 1 22/11/211 1 o teste A41N1 - Análise Matemática - BIOQ Nome... N o... 1. (2 valores) Calcule a soma da série 9 1 + 9 1 + 9 1 +... 9 1 + 9 1 + 9 1 + = 9 1 1 + 1 1 + 1 1 + 1 «1 +... =
.9.8.7.6.5.4.3.2.1 1 22/11/211 1 o teste A41N1 - Análise Matemática - BIOQ Nome... N o... 1. (2 valores) Calcule a soma da série 9 1 + 9 1 + 9 1 +... 9 1 + 9 1 + 9 1 + = 9 1 1 + 1 1 + 1 1 + 1 «1 +... =
Cap. 3 - Cinemática Tridimensional
 Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 3 - Cinemática Tridimensional Prof. Elvis Soares 1 Cinemática Vetorial Para determinar a posição de uma partícula no
Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 3 - Cinemática Tridimensional Prof. Elvis Soares 1 Cinemática Vetorial Para determinar a posição de uma partícula no
Geometria Analítica. Estudo do Plano. Prof Marcelo Maraschin de Souza
 Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Cálculo Vetorial. Um Livro Colaborativo
 Cálculo Vetorial Um Livro Colaborativo 19 de fevereiro de 2018 Organizadores #srcpath:/organizadores.tex# Esequia Sauter - UFRGS Fabio Souto de Azevedo - UFRGS Pedro Henrique de Almeida Konzen - UFRGS
Cálculo Vetorial Um Livro Colaborativo 19 de fevereiro de 2018 Organizadores #srcpath:/organizadores.tex# Esequia Sauter - UFRGS Fabio Souto de Azevedo - UFRGS Pedro Henrique de Almeida Konzen - UFRGS
MAT Cálculo II - FEA, Economia Calcule os seguintes limites, caso existam. Se não existirem, explique por quê: xy. (i) lim.
 lim.") MAT0147 - Cálculo II - FEA, Economia - 2011 Prof. Gláucio Terra 2 a Lista de Exercícios 1. Calcule os seguintes limites, caso existam. Se não existirem, explique por quê: xy x 2 y (a) lim (f) lim (x,y)
MAT0147 - Cálculo II - FEA, Economia - 2011 Prof. Gláucio Terra 2 a Lista de Exercícios 1. Calcule os seguintes limites, caso existam. Se não existirem, explique por quê: xy x 2 y (a) lim (f) lim (x,y)
MAT0326 Geometria Diferencial I
 MAT6 Geometria Diferencial I Primeira Prova /9/ Soluções Questão Valor:. =.5 +.5 pontos). a. Mostre que cos arctanx) ) =. + x b. Determine uma curva plana α : R R, parametrizada por comprimento de arco,
MAT6 Geometria Diferencial I Primeira Prova /9/ Soluções Questão Valor:. =.5 +.5 pontos). a. Mostre que cos arctanx) ) =. + x b. Determine uma curva plana α : R R, parametrizada por comprimento de arco,
(a) Determine a velocidade do barco em qualquer instante.
 Determine a velocidade do barco em qualquer instante.") NOME: UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Instituto de Matemática PRIMEIRA PROVA UNIFICADA CÁLCULO II Politécnica, Engenharia Química - 10/10/2013. 1 a QUESTÃO : Um barco a vela de massa m = 1 parte
NOME: UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Instituto de Matemática PRIMEIRA PROVA UNIFICADA CÁLCULO II Politécnica, Engenharia Química - 10/10/2013. 1 a QUESTÃO : Um barco a vela de massa m = 1 parte
MAT Geometria Diferencial 1 - Lista 1
 MAT0326 - Geometria Diferencial - Lista Monitor: Ivo Terek Couto 9 de outubro de 206 Observação. Assuma que todas as curvas e superfícies são diferenciáveis. Aquecimento Exercício. Seja α : I R R 3 uma
MAT0326 - Geometria Diferencial - Lista Monitor: Ivo Terek Couto 9 de outubro de 206 Observação. Assuma que todas as curvas e superfícies são diferenciáveis. Aquecimento Exercício. Seja α : I R R 3 uma
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma C /1 Prova da área I
 UFRGS - INSTITUTO DE MATEMÁTIA Departamento de Matemática Pura e Aplicada MAT01168 - Turma - 2018/1 Prova da área I 1-6 7 8 Total Nome: artão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
UFRGS - INSTITUTO DE MATEMÁTIA Departamento de Matemática Pura e Aplicada MAT01168 - Turma - 2018/1 Prova da área I 1-6 7 8 Total Nome: artão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
CURVAS REGULARES E EQUAÇÕES DE FRENET. Thiago Mariano Viana ¹, Dr. Fernando Pereira Souza ²
 1 CURVAS REGULARES E EQUAÇÕES DE FRENET Thiago Mariano Viana ¹, Dr. Fernando Pereira Souza ² ¹ Aluno do curso de Matemática CPTL/UFMS, bolsista do grupo PET Matemática CPTL/UFMS; ² Professor do curso de
1 CURVAS REGULARES E EQUAÇÕES DE FRENET Thiago Mariano Viana ¹, Dr. Fernando Pereira Souza ² ¹ Aluno do curso de Matemática CPTL/UFMS, bolsista do grupo PET Matemática CPTL/UFMS; ² Professor do curso de
Álgebra Linear I - Aula 6. Roteiro
 Álgebra Linear I - Aula 6 1. Equação cartesiana do plano. 2. Equação cartesiana da reta. 3. Posições relativas: de duas retas, de uma reta e um plano, de dois planos. Roteiro 1 Equação cartesiana do plano
Álgebra Linear I - Aula 6 1. Equação cartesiana do plano. 2. Equação cartesiana da reta. 3. Posições relativas: de duas retas, de uma reta e um plano, de dois planos. Roteiro 1 Equação cartesiana do plano
Integrais Sobre Caminhos e Superfícies. Teoremas de Integração do Cálculo Vectorial.
 Capítulo 5 Integrais Sobre Caminhos e Superfícies. Teoremas de Integração do Cálculo Vectorial. 5.1 Integral de Um Caminho. Integral de Linha. Exercício 5.1.1 Seja f(x, y, z) = y e c(t) = t k, 0 t 1. Mostre
Capítulo 5 Integrais Sobre Caminhos e Superfícies. Teoremas de Integração do Cálculo Vectorial. 5.1 Integral de Um Caminho. Integral de Linha. Exercício 5.1.1 Seja f(x, y, z) = y e c(t) = t k, 0 t 1. Mostre
ANÁLISE MATEMÁTICA II
 Universidade Fernando Pessoa Departamento de Ciência e Tecnologia Apontamentos de ANÁLISE MATEMÁTICA II Maria Alzira Pimenta Dinis 1999 Índice Índice Pág. Capítulo I Funções Vectoriais. 1 Curvas e Movimento
Universidade Fernando Pessoa Departamento de Ciência e Tecnologia Apontamentos de ANÁLISE MATEMÁTICA II Maria Alzira Pimenta Dinis 1999 Índice Índice Pág. Capítulo I Funções Vectoriais. 1 Curvas e Movimento
Exercícios. Observação: Tome a unidade sobre os eixos igual a distância comum entre as paralelas da figura. Fig. 2.4
 - O Plano 17 Exercícios 2.1. a) Construa um sistema de coordenadas de modo que na Figura 2.4 se tenha P(5, 2) e
- O Plano 17 Exercícios 2.1. a) Construa um sistema de coordenadas de modo que na Figura 2.4 se tenha P(5, 2) e
CÁLCULO IV - MAT Calcule a integral de linha do campo vetorial f ao longo da curva que indica-se em cada um dos seguintes itens.
 UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERIANA Instituto Latino-Americano de iências da Vida e da Natureza entro Interdisciplinar de iências da Natureza ÁLULO IV - MAT0041 1 a Lista de exercícios 1.
UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERIANA Instituto Latino-Americano de iências da Vida e da Natureza entro Interdisciplinar de iências da Natureza ÁLULO IV - MAT0041 1 a Lista de exercícios 1.
UNIVERSIDADE FEDERAL DE ITAJUBÁ Pró-Reitoria de Graduação - PRG Coordenação de Processos Seletivos COPS
 UNIVERSIDADE FEDERAL DE ITAJUBÁ Pró-Reitoria de Graduação - PRG Coordenação de Processos Seletivos COPS PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR 28/06/2015 Física
UNIVERSIDADE FEDERAL DE ITAJUBÁ Pró-Reitoria de Graduação - PRG Coordenação de Processos Seletivos COPS PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR 28/06/2015 Física
a definição de derivada parcial como limite do que aplicar as regras de derivação.)
") 2 a LISTA DE MAT 2454 - CÁLCULO II - POLI 2 o semestre de 2003. Ache as derivadas parciais de primeira ordem das funções : (a f(x, y = arctg y (b f(x, y, z, t = x y x z t 2. Seja f : IR IR uma função derivável.
2 a LISTA DE MAT 2454 - CÁLCULO II - POLI 2 o semestre de 2003. Ache as derivadas parciais de primeira ordem das funções : (a f(x, y = arctg y (b f(x, y, z, t = x y x z t 2. Seja f : IR IR uma função derivável.
Prof. Marcelo França
 Prof. Marcelo França VETOR POSIÇÃO ( ). No capítulo precedente, estudamos as propriedades e as operações envolvendo vetores. Temos, agora, plenas condições de iniciar o estudo dos movimentos no plano
Prof. Marcelo França VETOR POSIÇÃO ( ). No capítulo precedente, estudamos as propriedades e as operações envolvendo vetores. Temos, agora, plenas condições de iniciar o estudo dos movimentos no plano
Fazer os exercícios 35, 36, 37, 38, 39, 40, 41, 42 e 43 da 1 a lista.
 MAT 2454 - Cálculo II - POLI - 2 a Lista de Exercícios 2 o semestre de 2002 Fazer os exercícios 35, 36, 37, 38, 39, 40, 41, 42 e 43 da 1 a lista. 1. Calcule w t e w pela regra da cadeia e confira os resultados
MAT 2454 - Cálculo II - POLI - 2 a Lista de Exercícios 2 o semestre de 2002 Fazer os exercícios 35, 36, 37, 38, 39, 40, 41, 42 e 43 da 1 a lista. 1. Calcule w t e w pela regra da cadeia e confira os resultados
Capítulo 9 - Rotação de Corpos Rígidos
 Aquino Lauri Espíndola 1 1 Departmento de Física Instituto de Ciências Exatas - ICEx, Universidade Federal Fluminense Volta Redonda, RJ 27.213-250 1 de dezembro de 2010 Conteúdo 1 e Aceleração Angular
Aquino Lauri Espíndola 1 1 Departmento de Física Instituto de Ciências Exatas - ICEx, Universidade Federal Fluminense Volta Redonda, RJ 27.213-250 1 de dezembro de 2010 Conteúdo 1 e Aceleração Angular
CAPÍTULO 8 REGRA DA CADEIA (UM CASO PARTICULAR)
") CAPÍTULO 8 REGRA DA CADEIA UM CASO PARTICULAR 81 Introdução Em Cálculo 1A, aprendemos que, para derivar a função hx x 2 3x + 2 37, o mais sensato é fazer uso da regra da cadeia A regra da cadeia que é
CAPÍTULO 8 REGRA DA CADEIA UM CASO PARTICULAR 81 Introdução Em Cálculo 1A, aprendemos que, para derivar a função hx x 2 3x + 2 37, o mais sensato é fazer uso da regra da cadeia A regra da cadeia que é
Geometria Analítica II - Aula 5 108
 Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
SUBVARIEDADES RIEMANNIANAS DO ESPAÇO EUCLIDEANO
 SUBVARIEDADES RIEMANNIANAS DO ESPAÇO EUCLIDEANO PROFESSOR RICARDO SÁ EARP (1) Superfícies regradas. Seja I um intervalo aberto da reta. Uma superfície imersa regrada S em R 3 é a imagem de uma imersão
SUBVARIEDADES RIEMANNIANAS DO ESPAÇO EUCLIDEANO PROFESSOR RICARDO SÁ EARP (1) Superfícies regradas. Seja I um intervalo aberto da reta. Uma superfície imersa regrada S em R 3 é a imagem de uma imersão
Evolutas e Involutas: Planas e Espaciais
 Evolutas e Involutas: Planas e Espaciais Aluno: Igor Albuquerque Araujo Orientador: Marcos Craizer Introdução Foi feito um estudo de conjuntos focais de superfícies. Foram utilizados os softwares Maple
Evolutas e Involutas: Planas e Espaciais Aluno: Igor Albuquerque Araujo Orientador: Marcos Craizer Introdução Foi feito um estudo de conjuntos focais de superfícies. Foram utilizados os softwares Maple
PARAMETRIZAÇÃO DE CURVA:
 PARAMETRIZAÇÃO DE CURVA: parametrizar uma curva C R n (n=2 ou 3), consiste em definir uma função vetorial: r : I R R n (n = 2 ou 3), onde I é um intervalo e r(i) = C. Equações paramétricas da curva C de
PARAMETRIZAÇÃO DE CURVA: parametrizar uma curva C R n (n=2 ou 3), consiste em definir uma função vetorial: r : I R R n (n = 2 ou 3), onde I é um intervalo e r(i) = C. Equações paramétricas da curva C de
CURVAS PLANAS. A orientação de uma curva parametrizada é a direção definida pelos valores crescentes de t.
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA DISCIPLINA: TÓPICOS EM MATEMÁTICA APLICADOS À EXPRESSÃO GRÁFICA II PROFESSORA: BÁRBARA DE
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA DISCIPLINA: TÓPICOS EM MATEMÁTICA APLICADOS À EXPRESSÃO GRÁFICA II PROFESSORA: BÁRBARA DE
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma A /2 Prova da área I
 UFRGS - INSTITUTO E MATEMÁTICA epartamento de Matemática Pura e Aplicada MAT01168 - Turma A - 017/ Prova da área I 1-6 7 8 Total Nome: Cartão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
UFRGS - INSTITUTO E MATEMÁTICA epartamento de Matemática Pura e Aplicada MAT01168 - Turma A - 017/ Prova da área I 1-6 7 8 Total Nome: Cartão: Regras Gerais: Não é permitido o uso de calculadoras, telefones
UNIVERSIDADE FEDERAL DE OURO PRETO INSTITUTO DE CIÊNCIAS EXATAS E BIOLÓGICAS DEPARTAMENTO DE MATEMÁTICA
 UNIVERSIDADE FEDERAL DE OURO PRETO INSTITUTO DE CIÊNCIAS EXATAS E BIOLÓGICAS DEPARTAMENTO DE MATEMÁTICA Sexta Lista de Exercícios de Cálculo Diferencial e Integral III - MTM124 Prof. Júlio César do Espírito
UNIVERSIDADE FEDERAL DE OURO PRETO INSTITUTO DE CIÊNCIAS EXATAS E BIOLÓGICAS DEPARTAMENTO DE MATEMÁTICA Sexta Lista de Exercícios de Cálculo Diferencial e Integral III - MTM124 Prof. Júlio César do Espírito
Lista 3: Geometria Analítica
 Lista 3: Geometria Analítica A. Ramos 25 de abril de 2017 Lista em constante atualização. 1. Equação da reta e do plano; 2. Ângulo entre retas e entre planos. Resumo Equação da reta Equação vetorial. Uma
Lista 3: Geometria Analítica A. Ramos 25 de abril de 2017 Lista em constante atualização. 1. Equação da reta e do plano; 2. Ângulo entre retas e entre planos. Resumo Equação da reta Equação vetorial. Uma
x 2 + (x 2 5) 2, x 0, (1) 5 + y + y 2, y 5. (2) e é positiva em ( 2 3 , + ), logo x = 3
 2, x 0, (1) 5 + y + y 2, y 5. (2) e é positiva em ( 2 3 , + ), logo x = 3") Página 1 de 4 Instituto de Matemática - IM/UFRJ Cálculo Diferencial e Integral I - MAC 118 Gabarito segunda prova - Escola Politécnica / Escola de Química - 13/06/2017 Questão 1: (2 pontos) Determinar
Página 1 de 4 Instituto de Matemática - IM/UFRJ Cálculo Diferencial e Integral I - MAC 118 Gabarito segunda prova - Escola Politécnica / Escola de Química - 13/06/2017 Questão 1: (2 pontos) Determinar
Geometria Diferencial
 Geometria Diferencial Exercícios sobre curvas planas e espaciais - 2007 Versão compilada no dia 20 de Setembro de 2007. Departamento de Matemática - UEL Prof. Ulysses Sodré: ulysses(a)uel(pt)br Matemática
Geometria Diferencial Exercícios sobre curvas planas e espaciais - 2007 Versão compilada no dia 20 de Setembro de 2007. Departamento de Matemática - UEL Prof. Ulysses Sodré: ulysses(a)uel(pt)br Matemática
Aula Distância entre duas retas paralelas no espaço. Definição 1. Exemplo 1
 Aula 1 Sejam r 1 = P 1 + t v 1 t R} e r 2 = P 2 + t v 2 t R} duas retas no espaço. Se r 1 r 2, sabemos que r 1 e r 2 são concorrentes (isto é r 1 r 2 ) ou não se intersectam. Quando a segunda possibilidade
Aula 1 Sejam r 1 = P 1 + t v 1 t R} e r 2 = P 2 + t v 2 t R} duas retas no espaço. Se r 1 r 2, sabemos que r 1 e r 2 são concorrentes (isto é r 1 r 2 ) ou não se intersectam. Quando a segunda possibilidade
MAT Cálculo Diferencial e Integral para Engenharia II 1 a lista de exercícios
 MAT454 - Cálculo Diferencial e Integral para Engenharia II 1 a lista de exercícios - 008 POLINÔMIO DE TAYLOR 1. Utilizando o polinômio de Taylor de ordem, calcule um valor aproximado e avalie o erro: a)
MAT454 - Cálculo Diferencial e Integral para Engenharia II 1 a lista de exercícios - 008 POLINÔMIO DE TAYLOR 1. Utilizando o polinômio de Taylor de ordem, calcule um valor aproximado e avalie o erro: a)
3xz dx + 4yz dy + 2xy dz, do ponto A = (0, 0, 0) ao ponto B = (1, 1, 2), ao longo dos seguintes caminhos:
 ao ponto B = (1, 1, 2), ao longo dos seguintes caminhos:") Lista álculo III -A- 201-1 10 Universidade Federal Fluminense EGM - Instituto de Matemática GMA - Departamento de Matemática Aplicada LISTA - 201-1 Integral de Linha de ampo Vetorial Teorema de Green ampos
Lista álculo III -A- 201-1 10 Universidade Federal Fluminense EGM - Instituto de Matemática GMA - Departamento de Matemática Aplicada LISTA - 201-1 Integral de Linha de ampo Vetorial Teorema de Green ampos
Plano tangente a uma superficie: G(f).
.") Plano tangente a uma supericie: G. O plano tangente ao gráico de uma unção num ponto é o plano que contem todas as retas tangentes ao gráico de que passam pelo ponto. Se todas as retas tangente a esse
Plano tangente a uma supericie: G. O plano tangente ao gráico de uma unção num ponto é o plano que contem todas as retas tangentes ao gráico de que passam pelo ponto. Se todas as retas tangente a esse
MAT CÁLCULO 2 PARA ECONOMIA. Geometria Analítica
 MT0146 - CÁLCULO PR ECONOMI SEMESTRE DE 016 LIST DE PROBLEMS Geometria nalítica 1) Sejam π 1 e π os planos de equações, respectivamente, x + y + z = e x y + z = 1. Seja r a reta formada pela interseção
MT0146 - CÁLCULO PR ECONOMI SEMESTRE DE 016 LIST DE PROBLEMS Geometria nalítica 1) Sejam π 1 e π os planos de equações, respectivamente, x + y + z = e x y + z = 1. Seja r a reta formada pela interseção
VETOR POSIÇÃO 𝑟 = 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘
 VETOR POSIÇÃO r = xi + yj + zk VETOR DESLOCAMENTO Se uma partícula se move de uma posição r 1 para outra r 2 : r = r 2 r 1 r = x 2 x 1 i + y 2 y 1 j + z 2 z 1 k VETORES VELOCIDADE MÉDIA E VELOCIDADE INSTANTÂNEA
VETOR POSIÇÃO r = xi + yj + zk VETOR DESLOCAMENTO Se uma partícula se move de uma posição r 1 para outra r 2 : r = r 2 r 1 r = x 2 x 1 i + y 2 y 1 j + z 2 z 1 k VETORES VELOCIDADE MÉDIA E VELOCIDADE INSTANTÂNEA
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Onde estamos? Nosso roteiro ao longo deste capítulo Cinemática retilínea: movimento contínuo
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Onde estamos? Nosso roteiro ao longo deste capítulo Cinemática retilínea: movimento contínuo
1. Esboce o grá co de cada curva dada abaixo, indicando a orientação positiva. (a) ~r (t) = t~i + (1 t)~j; 0 t 1: (b) ~r (t) = 2t~i + t 2 ~j; 1 t 0:
 ~r (t) = t~i + (1 t)~j; 0 t 1: (b) ~r (t) = 2t~i + t 2 ~j; 1 t 0:") 2. NTEGRAL E LNHA CÁLCULO 3-2018.1 2.1. :::: :::::::::::::::::::::::: ARCOS REGULARES Um arco (ou trajetória) : ~r (t) = x (t)~i + y (t)~j + z (t) ~ k; a t b; denomina-se arco regular quando as componentes
2. NTEGRAL E LNHA CÁLCULO 3-2018.1 2.1. :::: :::::::::::::::::::::::: ARCOS REGULARES Um arco (ou trajetória) : ~r (t) = x (t)~i + y (t)~j + z (t) ~ k; a t b; denomina-se arco regular quando as componentes
12 AULA. ciáveis LIVRO. META Estudar derivadas de funções de duas variáveis a valores reais.
 1 LIVRO Diferen- Funções ciáveis META Estudar derivadas de funções de duas variáveis a valores reais. OBJETIVOS Estender os conceitos de diferenciabilidade de funções de uma variável a valores reais. PRÉ-REQUISITOS
1 LIVRO Diferen- Funções ciáveis META Estudar derivadas de funções de duas variáveis a valores reais. OBJETIVOS Estender os conceitos de diferenciabilidade de funções de uma variável a valores reais. PRÉ-REQUISITOS
Deduzimos a equação do ciclóide na proxima seção.
 Chapter Curvas Paramétricas Introdução e Motivação: No estudo de curvas cartesianas estamos acostumando a tomar uma variável como independente e a outra como dependente, ou seja = f() ou = h(). Porem,
Chapter Curvas Paramétricas Introdução e Motivação: No estudo de curvas cartesianas estamos acostumando a tomar uma variável como independente e a outra como dependente, ou seja = f() ou = h(). Porem,
MAT Cálculo II - POLI
 MAT25 - Cálculo II - POLI Primeira Lista de Exercícios - 2006 TAYLOR 1. Utilizando o polinômio de Taylor de ordem 2, calcule um valor aproximado e avalie o erro: (a) 3 8, 2 (b) ln(1, 3) (c) sen (0, 1)
MAT25 - Cálculo II - POLI Primeira Lista de Exercícios - 2006 TAYLOR 1. Utilizando o polinômio de Taylor de ordem 2, calcule um valor aproximado e avalie o erro: (a) 3 8, 2 (b) ln(1, 3) (c) sen (0, 1)