MÉTODO DE COORDENAÇÃO SEMAFÓRICA PARA CORREDORES DE TRANSPORTE COLETIVO. Aníbal Durães de Almeida Júnior
|
|
|
- Leonor Caetano Teves
- 6 Há anos
- Visualizações:
Transcrição
1 MÉTODO DE COORDENAÇÃO SEMAFÓRICA PARA CORREDORES DE TRANSPORTE COLETIVO TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM CIÊNCIAS EM ENGENHARIA DE TRANSPORTES. Aprovada por: Prof. Walter Porto Junor, Dr.-Ing. Prof. Lcno da Slva Portugal, D.Sc. Prof. Carlos Davd Nass, Dr.Ing. Prof a. Mara Alce Prudênco Jacques, Ph.D. Prof. Máro Jorge Ferrera de Olvera, Ph.D. RIO DE JANEIRO, RJ BRASIL. FEVEREIRO DE 2007
2 ALMEIDA JÚNIOR, ANÍBAL DURÃES Método de Coordenação Semafórca para Corredores de Transporte Coletvo. [Ro de Janero] XVII, 217 p. 29,7 cm (COPPE/UFRJ, D.Sc., Engenhara de Transportes, 2007). Tese - Unversdade Federal do Ro de Janero, COPPE. 1. Coordenação de Semáforos. 2. Prordade para o Transporte Coletvo. 3. Faxa de Onda Verde 4. Analse de Interseções Isoladas I. COPPE/UFRJ II. Título (sére).
3 AOS MEUS PAIS, ANÍBAL DURÃES DE ALMEIDA BENEDITA ATHAYDE DE ALMEIDA E A MINHA ESPOSA, MARINA DA SILVA VIEIRA
4 AGRADECIMENTOS O desenvolvmento desta pesqusa deve-se a algumas pessoas e nsttuções, por dferentes razões, e eu gostara de agradecer especalmente: Aos meus pas, pela sólda formação dada até mnha juventude, que me proporconou a contnudade nos estudos até a concretzação deste doutorado. A mnha esposa, Marna da Slva Vera, que ao longo desses quatro anos de pesqusa fo amga, companhera, amorosa e compreensva. No entanto, peço também, desculpas pela ausênca ou mpossbldade de passear nos fnas de semana, que mutas vezes sacrfque para os momentos de dedcação à pesqusa. Ao Professor Walter Porto Júnor, por compartlhar comgo o desenvolvmento desse tema de pesqusa, sendo um nterlocutor dsposto a oferecer estímulos e, prncpalmente, percorrer novos camnhos, ouvr com nteresse e ânmo todas as questões, dúvdas e problemas que surgam durante a pesqusa. Por ser um nterlocutor pacente e generoso. Por sua amzade e compreensão slencosa dos momentos dfíces pelos quas passe, permtndo que meu tempo nterno fluísse, respetosamente. Pela alegra de trabalharmos juntos. Ao Professor Carlos Davd Nass, coordenador do Laboratóro de Geoprocessamento em Transportes do Programa de Engenhara de Transportes da COPPE/UFRJ, pela oportundade de partcpar dos projetos e pesqusas desenvolvdas pelo laboratóro, ao longo dos quatro anos de doutorado. A professora Ilce Maríla Dantas Pnto de Fretas, que partcpou da mnha banca de exame de qualfcação, ajudando com város esclarecmentos e mostrando os possíves obstáculos que seram encontrados ao longo da pesqusa. Aos professores Mara Alce Prudênco Jacques e Máro Jorge Ferrera de Olvera pela partcpação da banca de defesa de doutorado com suas crítcas e sugestões. Aos colegas do PLANET e do PET: Aurélo Ferrera, Ervelton Guedes, Danel Pedro, Sergo Lopes, Frederco Campos, Maro Ney, Márca Estrada, Thereza, André Costa, José Reymão e tantos outros que foram tão mportantes durante este quatro anos de dedcação à tese. Ao Programa de Engenhara de Transportes da COPPE/UFRJ, na pessoa do seu coordenador Professor Paulo César Rbero, agradeço pela nfra-estrutura dsponblzada e o valoso apoo prestado pelos seus funconáros e técncos. A CAPES que me concedeu uma bolsa durante a realzação deste doutorado, fato este que muto contrbuu para vablzação desta tese. A todos aqueles que dreta ou ndretamente contrbuíram para a elaboração dessa tese, expresso meu reconhecmento e dedco o resultado desta pesqusa. v
5 Resumo da Tese apresentada à COPPE/UFRJ como parte dos requstos necessáros para a obtenção do grau de Doutor em Cêncas (D.Sc.) MÉTODO DE COORDENAÇÃO SEMAFÓRICA PARA CORREDORES DE TRANSPORTE COLETIVO Feverero/2007 Orentador: Walter Porto Junor Programa: Engenhara de Transportes A pesqusa tem por objetvo desenvolver um método de coordenação semafórca com prordade para o transporte coletvo em vas arteras urbanas. Neste sentdo, sugerem-se crtéros para defnção de prordades, em função de determnadas varáves de tráfego e condções de crculação do trânsto. Para facltar a obtenção dos resultados, o método está resumdo em um software capaz de obter a programação semafórca de cada nterseção solada e do corredor váro, com prordades operaconas para os veículos coletvos. O software apresenta os resultados no formato de texto e gráfco, por meo do emprego do dagrama espaço-tempo, reproduzndo a coordenação semafórca ao longo do corredor, com as faxas dsponíves para o deslocamento, lvre de nterrupções dos semáforos fechados, respectvamente, para os veículos coletvos e ndvduas. A coordenação para ambos os modos motorzados é possível, dependendo das característcas físcas e geométrcas do corredor váro. v
6 Abstract of Thess presented to COPPE/UFRJ as a partal fulfllment of the requrements for the degree of Doctor of Scence (D.Sc.). METHOD OF TRAFFIC SIGNAL COORDINATION FOR CORRIDORS OF TRANSIT February/2007 Advsor: Walter Porto Junor Department: Transport Engneerng The research has objectve to develop method traffc sgnal coordnaton wth prorty for the publc transportaton n urban arteral. In ths sense, there are defned crtera of prortes for publc transportaton n functon of certan varables of traffc and condtons of crculaton. To facltate the obtanng of the results, the method s summarzed n software capable to obtan sgnal tmngs to maxmze arteral through progresson, wth operatonal prortes for publc transportaton vehcles. The method presents the results n text and graph format, usng the space-tme dagram, reproducng the traffc lght coordnaton along the arteral, wth the avalable strps for the dsplacement, wthout nterruptons of the closed traffc lghts, respectvely, for the publc and ndvdual transportaton vehcles. The traffc sgnal coordnaton for both motorzed manners s possble, dependng physcal and geometrc characterstcs on the arterals. v
7 ÍNDICE CAPÍTULO 1 - INTRODUÇÃO Introdução Objetvo Justfcatva Estrutura da pesqusa...8 CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA Hstórco Crtéros de mplantação Termnologa Controladores de tráfego Equpamentos de coleta - sensores Tpos dos controles e operações dos semáforos Modos de controle Operação de semáforos Abordagens dos modelos de smulação de tráfego Sstema de Transporte Coletvo por Ônbus Modelos de ônbus urbano Característcas operaconas do sstema Prordade para Transporte Coletvo nas vas Tráfego msto Faxa exclusva Psta exclusva (canaleta, busway) Va exclusva Curb extensons Prordade nas nterseções semafórcas Classfcação das prordades Queue jump Consderações fnas...46 CAPÍTULO 3 - ALGORITMOS E APLICAÇÕES Introdução Algortmos aplcados na engenhara de tráfego Algortmos de busca exaustva Algortmo Hll-Clmbng (Subda da colna ou da montanha) Busca por satsfação de restrções Mnmzação de confltos...51 v
8 Técncas de programação matemátca Algortmos genétcos Coordenação dos semáforos Modelos de otmzação off-lne MAXBAND PASSER II KOORD RT-TSD 3.0 (Tme Space Dagram) TRANSYT (TRAffc Network StudY Tool) PASSER V SYNCHRO Consderações fnas...61 CAPÍTULO 4 - METODO KOORD Método do KOORD (PORTO, 1982) Coordenação para Transporte Indvdual Processo matemátco Síntese da análse Defasagem dos aconamentos dos tempos de verde Ajuste da defasagem para o fluxo e contrafluxo Coordenação para Transporte Coletvo Processo matemátco Coordenação para o Transporte Indvdual e Coletvo - Bmodal Processo matemátco Consderações fnas CAPÍTULO 5 - MEDOTOLOGIA Introdução Análse de nterseção solada Setas dreconas de tráfego Fluxo horáro médo Chegada de veículos na nterseção vára Dstrbução das fases Determnação do atraso Processo de análse de nterseção solada Contrbuções para o método do KOORD Velocdade varável por trecho Meddas de desempenho Coordenação para o Transporte Indvdual (TI) no fluxo v
9 Coordenação para o Transporte Coletvo (TC) no fluxo Coordenação para o Transporte Indvdual (TI) no fluxo com Transporte Coletvo (TC) no contrafluxo Coordenação para o Transporte Indvdual (TI) no fluxo e contrafluxo Coordenação para o Transporte Coletvo (TC) no fluxo e contrafluxo Coordenação para o Transporte Indvdual (TI) e Transporte Coletvo (TC) no fluxo e contrafluxo - BIMODAL Comparação entre o KOORD e o COORBUS Implementação da metodologa Lnguagem de programação Ambente gráfco Procedmentos gráfcos desenvolvdos em Opengl Consderações fnas CAPÍTULO 6 - APLICAÇÃO DA METODOLOGIA Estudo de caso Consderações fnas CAPÍTULO 7 - CONCLUSÕES E RECOMENDAÇÕES REFERÊNCIAS BIBLIOGRÁFICAS ANEXO I. Equpamentos Intrusvos e Não Intrusvos ANEXO II. Fluxograma do Programa COORBUS ANEXO III. Bbloteca Gráfca Opengl ANEXO IV. Prncpas Telas do Programa COORBUS ANEXO V. Dados das nterseções do estudo de caso x
10 ÍNDICE DE TABELAS: Tabela 2.1. Tpos e operações de semáforos Tabela 2.2: Característcas dmensonas dos ônbus urbanos Tabela 2.3: Velocdades deas para operação de ônbus urbanos Tabela 2.4: Tempo de embarque/desembarque por tpo e quantdade de portas...32 Tabela 2.5: Níves de segregação e tpos de tratamento/operação da va...33 Tabela 2.6: Vantagens e desvantagens das faxas exclusvas Tabela 2.7: Vantagens e desvantagens das pstas exclusvas Tabela 2.8: Vantagens e desvantagens das vas exclusvas Tabela 2.9: Tpos de tratamento por tpo de prordade...43 Tabela 3.1. Meddas de desempenho - efcênca e acessbldade...59 Tabela 3.2. Qualdade onda verde em função da efcênca...60 Tabela 3.3. Resumo dos softwares de coordenação semafórca...61 Tabela 4.1. Analse dos deslocamentos do tempo de vermelho Tabela 5.1. Fatores de equvalênca vecular Tabela 5.2. Efcênca e acessbldade Tabela 5.3. Comparação entre o KOORD e o COORBUS Tabela 5.4. Representação gráfca do verde e vermelho efetvo para o fluxo Tabela 5.5. Representação gráfca do tempo de verde e vermelho efetvo para o contrafluxo Tabela 5.6. Representação gráfca da faxa de onda verde para o Transporte Indvdual (TI) e Transporte Coletvo (TC) Tabela 5.7. Representação gráfca dos pontos de parada de ônbus Tabela 6.1. Característcas físcas e operaconas das nterseções corredor Av. Atlântca Tabela 6.2. Característcas operaconas do corredor Av. Atlântca Tabela 6.3. Dstânca entre os pontos de parada de ônbus - Av. Atlântca Tabela 6.4. Defasagens atuas das nterseções no corredor Av. Atlântca Tabela 6.5. Espaçamento dos pontos de parada de ônbus de 400 metros x
11 ÍNDICE DE FIGURAS: Fgura 2.1: Semáforo nventado por J. P. Knght em Fgura 2.2: Semáforo nventado por Lester Wre em Fgura 2.3: Semáforo nventado por James Hoge em Fgura 2.4: Semáforo nventado por Wllam Potts em Fgura 2.5: Semáforo nventado por Garrett Augustus Morgan em Fgura 2.6: Dagrama de fases e estágos Fgura 2.7: Gabnete de um controlador de tráfego Fgura 2.8: Semáforos sem-atuados e totalmente atuados Fgura 2.9: Extensão do tempo de verde em uma fase atuada Fgura 2.10: Coordenação de semáforos Fgura 2.11: Comportamento dos ônbus no ponto de parada Fgura 2.12: Faxa exclusva ao longo do meo-fo, no sentdo do fluxo Fgura 2.13: Faxa exclusva junto ao meo-fo, no contrafluxo Fgura 2.14: Faxa exclusva junto ao cantero central. Verfcar faxa exclusva Fgura 2.15: Psta exclusva Fgura 2.16: Curb extensons Fgura 2.17: Trajetóra do veículo sem prordade Fgura 2.18: Prordade nas nterseções semafórcas Fgura 2.19: Queue jump Fgura 3.1: Busca Hll-Clmbng Fgura 3.2: Estrutura básca de um AG smples Fgura 3.3: Exemplo de rede no TRANSYT Fgura 4.1. Dagrama espaço-tempo para coordenação smples Fgura 4.2. Superposção dos dagramas espaço-tempo das coordenações smples.. 64 Fgura 4.3. Deslocamento do dagrama do fluxo - Excentrcdade Fgura 4.4. Dagrama dstânca-tempo para coordenação smples transporte coletvo.66 Fgura 4.5. Processo gráfco da coordenação Bmodal Fgura 4.6. Ponto de encontro das velocdades (TP) Fgura 4.7. Defasagem no fluxo e contrafluxo para o TI Fgura 4.8. Varação da prordade k Fgura 4.9. Os vermelhos se superpõem (Caso Ia) Fgura O vermelho do fluxo não nterfere na onda verde do contrafluxo (Caso Ib) Fgura O vermelho do fluxo nterfere na faxa de onda verde do contrafluxo x
12 Fgura O vermelho do fluxo nterfere na faxa de onda verde do contrafluxo e é elmnado (Caso II) Fgura O vermelho do fluxo nterfere na faxa de onda verde do contrafluxo, o deslocamento é para esquerda e não pode ser elmnado (Caso IIIa) Fgura O ponto de encontro do lmte esquerdo das faxas de onda verde Fgura Interferênca do vermelho pela esquerda da onda verde do contrafluxo (Caso IIIb)...79 Fgura Interferênca do vermelho pela esquerda da onda verde do contrafluxo (Caso IIIc) Fgura Interferênca do vermelho pela dreta da onda verde do contrafluxo (Caso IVa) Fgura Interferênca do vermelho pela dreta da onda verde do contrafluxo (Caso IVb) Fgura Ajuste da localzação da lnha de retenção Fgura Aconamentos no fluxo e contrafluxo para o TC Fgura Localzação dos pontos lmtes das faxas de onda verde (b e b ) Fgura Superposção da onda verde do TC com o TI Fgura Elmnar superposção com deslocamento para esquerda Fgura Elmnar superposção com deslocamento para dreta Fgura Deslocamento máxmo admssível para esquerda ou dreta Fgura Resíduos da superposção pela dreta nas faxas de onda verde do TC, no fluxo e contrafluxo Fgura Resíduos da superposção pela esquerda nas faxas de onda verde do TC, no fluxo e contrafluxo Fgura Resíduos da superposção pela dreta nas faxas de onda verde do TI, no fluxo e contrafluxo Fgura Resíduos da superposção pela dreta nas faxas de onda verde do TI, no fluxo e contrafluxo Fgura 5.1. Dagrama da dstrbução de Posson Fgura 5.2. Ponto de conflto Fgura 5.3. Processo de análse de nterseção solada Fgura 5.4. Velocdade méda e varável por trecho Fgura 6.1. Corredor Avenda Atlântca Fgura 6.2. Localzação dos pontos de ônbus - Avenda Atlântca Fgura 6.3. Dagrama espaço-tempo para os dados da CET-RIO Fgura 6.4. Coordenação para o Transporte Indvdual (TI) dados CET-RIO x
13 Fgura 6.5. Resultado da coordenação para o TI dados CET-RIO Fgura 6.6. Coordenação para o Transporte Coletvo (TC) dados CET-RIO Fgura 6.7. Resultado da coordenação para o TC dados CET-RIO Fgura 6.8. Coordenação Bmodal dados CET-RIO Fgura 6.9. Resultado da coordenação Bmodal dados CET-RIO Fgura Bmodal - velocdade de 50 km/h no contrafluxo para o TC Fgura Resultados Bmodal - 50 km/h no contrafluxo para o TC Fgura Bmodal novo espaçamento entre pontos de parada Fgura Resultados Bmodal novo espaçamento entre pontos de parada Fgura Exemplo nterseção solada característcas físcas e operaconas Fgura Exemplo nterseção solada pontos de conflto x
14 GLOSSÁRIO: Total Band : faxa de onda verde total (dreção A+ dreção B)...59 GA GB I u : Menor verde na dreção A;...59 : Menor verde na dreção B;...59 : Mínma nterferênca possível na faxa de onda verde...59 : Folga dsponível para deslocamento do verde efetvo da nterseção em cclos [s];...68 t g : Tempo de verde efetvo da nterseção [s];...68 B VR : Ampltude ou faxa de onda verde [s]...68 : Velocdade no fluxo [m/s];...68 VG : Velocdade no contrafluxo [m/s];...68 C T : Tempo de cclo [s]...68 : Tempo para aconamento do semáforo em relação ao prmero, tal que o semáforo esteja ncando o tempo de verde [s];...69 e p1 : Excentrcdade do prmero semáforo [m];...69 s 1 : Dstanca entre exos do semáforo um ao semáforo [m];...69 V : Velocdade entre os semáforos um e [m/s];...69 : Identfcador da nterseção semafórca {1,2,3,..,n} T, C T :Tempo de aconamento em cclo [c] :Tempo de cclo [s]...70 t : defasagem da nterseção com relação ao nco do vermelho na nterseção 1 (t=0)70 t : defasagem no fluxo t : defasagem no contrafluxo t g : tempo de verde efetvo da nterseção [s];...72 B : ampltude ou faxa de onda verde [s] ( t - tr ) : Iníco do tempo de vermelho do fluxo [seg.];...73 ( t + B) : Lmte esquerdo (níco) da onda verde do contrafluxo [seg.] u : Folga dsponível antes do deslocamento (equação 4.1);...75 d : deslocamento para elmnar a nterferênca z : parte que nterfere na faxa onda verde com a correção dos novos lmtes;...78 _ ( t + B l max ) : novo lmte da faxa de onda verde do contrafluxo;...78 xv
15 (t max r p + r t ) : o níco do vermelho após o deslocamento ( r max ) : nterferênca resultante na onda verde do contrafluxo após o deslocamento u + l max ;...78 t (u l ) : fm do vermelho após deslocamento u + l max ;...78 max t + r max : nco da onda verde do contrafluxo (b )...78 u : folga de tempo de verde dsponível após o deslocamento;...80 u : folga de tempo de verde ncal (Formula 5.08)...80 p z : nterferênca resultante na onda verde do contrafluxo após o deslocamento u + l max (Fgura 4.16c);...80 : parte que nterfere na faxa onda verde com a correção dos novos lmtes, após o deslocamento para dreta no valor de r max (Fgura 4.16b);80 z : parte que nterfere na faxa onda verde com a correção dos novos lmtes, após o deslocamento para dreta no valor de r max (Fgura 4.17b);...82 p : nterferênca resultante na onda verde do contrafluxo após o deslocamento u + l max (Fgura 4.17c);...82 z : parte que nterfere na faxa onda verde com a correção dos novos lmtes, após o deslocamento para dreta no valor de r max (Fgura 4.17a);...84 ( t + B) : Lmte dreto da onda verde do contrafluxo (t max r + r t ) : níco do tempo de vermelho u : folga de tempo de verde dsponível após o deslocamento [c];...85 u : folga de tempo de verde ncal [c] (Equação 4.1) TR, TG : Defasagem dos aconamentos no sentdo do fluxo e contrafluxo [c];...91 EO SRO : Excentrcdade Valor do passo na teração, o valor máxmo é TP;...91 : Dstânca da nterseção até a orgem do exo no sentdo do fluxo [m];...91 SGO : Dstânca da nterseção até a orgem do exo no sentdo do contrafluxo [m];...91 VRO, VGO : Velocdade na dreção do fluxo e contrafluxo [m/s];...91 C : Tempo de cclo;...91 HR, HG : Tempo gasto no ponto de parada no sentdo do fluxo e contrafluxo [s];...91 t e (TC) : defasagem do aconamento do tempo verde do TC, ajustado para o sstema de coordenadas do TI [c];...91 xv
16 E t " e (TC) : dstânca, em undades de tempo, entre a orgem das coordenadas de referênca do TI ao dagrama do TC [c] (Fgura 4.5)...91 : defasagem do aconamento do tempo de verde para TC na analse da L, R L, R L, R L, R coordenação Bmodal [c]...92 : Ponto de níco e do fm da faxa de onda verde do fluxo na nterseção ();93 : Ponto de níco e do fm da faxa de onda verde do contrafluxo na nterseção ();...93 : Ponto de níco e do fm da faxa de onda verde do fluxo na nterseção ();93 : Ponto de níco e do fm da faxa de onda verde do contrafluxo na nterseção ();...93 L, R ( TI) ( TI) : Extremo esquerdo e dreto das faxas de onda verde do TI na d nec nterseção () : deslocamento necessáro para elmnar a superposção na faxa de onda verde do TI [c] d max : deslocamento máxmo admssível na nterseção [c];...97 L, L (TC) :Ponto de níco da faxa de onda verde do TC para o fluxo e (TC) (TC) contrafluxo, respectvamente, na nterseção () [c];...97 R, R (TC) : Ponto do fm da faxa de onda verde do TC para o fluxo e contrafluxo, respectvamente, na nterseção () [c];...97 b (TC), b (TC) : Faxa de onda verde do TC resultante após a coordenação do TC para o fluxo e contrafluxo, respectvamente [c] D : deslocamento mas favorável a ser adotado para a nterseção ();...98 l, (TC) r, r (TC) l (TC) (TC) b (TC), (TC),: Resíduo da superposção do tempo de vermelho pelo lado dreto das faxas de onda verde do TC no fluxo e contrafluxo, respectvamente;...99 : Resíduo da superposção do tempo de vermelho pelo lado esquerdo das faxas de onda verde do TC no fluxo e contrafluxo, respectvamente;..100 b : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, na coordenação bmodal para o TC após o deslocamento (D ) [c]; xv
17 b (TI), b (TI) : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, r, r (TI) l, (TI) (TI) _ l (TI) b (TI), (TI) na coordenação do TI [c] : Resíduo da superposção do tempo de vermelho pelo lado dreto das faxas de onda verde do TI no fluxo e contrafluxo, respectvamente; : Resíduo da superposção do tempo de vermelho pelo lado esquerdo das faxas de onda verde do TI no fluxo e contrafluxo, respectvamente; b : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, na coordenação bmodal para o TI, após todos os deslocamentos (D) [c];103 (TI) b (TI), b : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, na coordenação do TI [c] t " e (TC) : defasagem do aconamento do tempo de verde para transporte coletvo na analse da coordenação Bmodal [c] TP : Ponto de encontro das velocdades do fluxo com o contrafluxo; VR 1 : velocdade ncal no fluxo [m/s]; VG 1 : velocdade ncal no contrafluxo [m/s]; C : tempo de cclo [s] EI : excentrcdade ncal [m]; TR : aconamento da nterseção no fluxo em relação à nterseção 1 [c]; TG : aconamento da nterseção no contrafluxo em relação à nterseção 1 [c]; SR : posção da nterseção no fluxo [m]; SG : posção da nterseção no contrafluxo [m]; VR : velocdade no trecho no fluxo [m/s]; VG : velocdade no trecho no contrafluxo [m/s]; : dentfcador da nterseção; n : número de nterseções do corredor em análse HR : tempo de permanênca no ponto de parada [s]; HG : tempo de permanênca no ponto de parada [s]; HR : tempo de permanênca no ponto de parada no fluxo [s]; HG : tempo de permanênca no ponto de parada no contrafluxo [s]; xv
18 CAPÍTULO 1 - INTRODUÇÃO 1
19 1.1. Introdução O carro partcular é o veículo em maor número crculando em áreas urbanas, além de ser o modo que ocupa mas área, por passagero transportado. As polítcas benefcando a produção e o consumo de automóves partculares e o hábto de amplação da nfra-estrutura vára como forma de reduzr os congestonamentos urbanos, ao contráro do desejado, só agravou o problema. Por outro lado, a falta de nvestmentos na amplação e melhoras dos sstemas de Transporte Coletvo provocou a queda do nível de seus servços, aumentando anda mas a atratvdade e o poder de concorrênca do carro partcular, além de favorecer o surgmento do transporte coletvo clandestno. Recentemente, verfca-se, também, o aumento da utlzação de motoccletas. Outro aspecto relevante para a consoldação deste cenáro é a alta densdade de ocupação e a multplcdade de atvdades localzadas no prncpal centro comercal urbano. Os congestonamentos, cada vez mas freqüentes e duradouros, dfcultam o acesso na área central. Com o agravamento da stuação, os Pólos Geradores de Vagens se transferem para outras áreas menos densas, dando lugar a novos centros comercas e de servços. Para evtar, que o adensamento desordenado do uso do solo reproduza as mesmas condções de saturação, faz-se necessáro planejar ntervenções urbanístcas e nos sstemas de transporte, compatblzando o trânsto com as novas atvdades exercdas nessas áreas. Neste contexto, a engenhara de tráfego pode contrbur não só para uma melhor efcênca do uso da malha vára, como, também para a consoldação destes novos centros, através de meddas para nbr o uso ndscrmnado do automóvel e amplar as facldades e as áreas para crculação do Transporte Coletvo e do não motorzado, como por exemplo, mplementar: ntegração dos sstemas de transportes; moderação do tráfego; melhoras operaconas no sstema de crculação e de controle do tráfego de veículos coletvos e de modos não motorzados. O efeto do congestonamento no aumento do tempo de vagem, do desconforto e dos custos operaconas, afeta todos os modos de deslocamento, prncpalmente os sstemas de Transporte Coletvo de méda capacdade ônbus convenconal e bonde (VLT) pela mpossbldade de alterar seus tneráros. Neste caso, para melhora do desempenho de seus servços, deveram ser estabelecdas prordades de crculação em uma rede de corredores város nterlgando os centros 2
20 concentradores de Pólos Geradores de Vagens, através da segregação espacal dos fluxos em faxas ou ruas exclusvas e programação semafórca preferencal Objetvo A presente pesqusa tem por objetvo desenvolver um método de coordenação de semáforos com prordade para o Transporte Coletvo de méda capacdade (VLT ou ônbus) em vas arteras urbanas. Para tanto, serão estabelecdos crtéros para defnção de prordades com base na herarqua e respectvas funções das vas urbanas. Para vablzar a aplcação pratca e obtenção dos resultados, deste trabalho de pesqusa, será crado um software para determnar a programação semafórca em corredores város, com prordades operaconas para os veículos coletvos. O referdo software será amgável, em ambente wndows, com entrada de dados por entdades gráfcas e textuas, com processo teratvo de nstruções e lstagem de dados nclundo a possbldade de apresentação dos algortmos e seus resultados em forma de tabelas e em gráfcos. Com relação à revsão do estado da arte, para dentfcar as possíves contrbuções de aportes teórcos adconas a serem consderados em novos softwares, foram dentfcados os seguntes aspectos, comentados mas detalhadamente no tem 1.3.4: Incorporar no método de coordenção, o cálculo dos planos semafórcos que garantam nível equvalente de segurança e de qualdade de atendmento, para as correntes de fluxos confltantes em todos os acessos das nterseções dos trechos város em estudo, utlzando uma probabldade não haver sobrecarga; Inclur, no processo de cálculo dos planos semafórcos, a determnação dos pontos de confltos crítcos para permtr o cálculo crteroso dos tempos entreverdes, reduzndo os rscos de choques; Incorporar no algortmo para determnação dos planos semafórcos os cálculos dos tempos de verde necessáros para os pedestres, garantndo qualdade de atendmento adequado às característcas das respectvas demandas exstentes e às dmensões das travessas de pedestres; Consderando que determnadas condções de tráfego podem apresentar dferenças sgnfcatvas entre cdades, para vablzar o desenvolvmento e maor adaptação do software à realdade do tráfego local, a pesqusa está sendo 3
21 desenvolvda tendo como referênca determnadas condções de trânsto da cdade do Ro de Janero. Entretanto, a frontera de utlzação do software não se lmtará, necessaramente, à cdade do Ro de Janero, desde que as varáves de tráfego empregadas, no processamento de dados, sejam ajustadas à dnâmca do tráfego de uma outra localdade Justfcatva Transporte Coletvo Nos últmos dez anos, em conseqüênca da falta de melhoras, o sstema de transporte coletvo de passageros sofreu uma queda de cerca de 12% no número de passageros transportados, conforme pesqusa realzada pela Assocação Naconal das Empresas de Transportes Urbanos (NTU,2002) em oto captas brasleras. Este modo anda contnua sendo o meo de deslocamento urbano de maor partcpação. Estma-se que as lnhas de ônbus convenconal sejam responsáves por cerca de 60% dos deslocamentos dáros nas cdades brasleras de grande e médo porte. Entretanto, no que tange à partcpação deste modo no trânsto váro, levantamentos realzados pelo Insttuto de Pesqusa Econômca Aplcada (IPEA) e Assocação Naconal de Transportes Públcos (ANTP) demonstram que, em algumas captas brasleras, o ônbus ocupa menos do que 15% do espaço para crculação de veículos motorzados (PORTO, 2001). Os congestonamentos e suas repercussões sobre os transportes trazem no seu âmago o conflto sempre presente entre custo prvado e custo socal. Em geral, o usuáro do automóvel partcular toma conhecmento apenas de seus custos operaconas. Contudo, nos períodos em que as vas urbanas se encontram saturadas, cada automóvel adconal representa um acréscmo sgnfcatvo nos custos generalzados do transporte, penalzando toda comundade. De acordo com as pesqusas do IPEA/ANTP,1998, a velocdade comercal dos ônbus em dversas captas stua-se abaxo de 20 km/h e o tempo perddo com o congestonamento ultrapassa o valor 30% do tempo de vagem. Para compensar estes atrasos, faz-se necessáro aumentar o número da frota de veículos em crculação, sobrecarregando anda mas os custos operaconas, os quas acabam sendo repassados no aumento da tarfa cobrada. Desse modo, a população mas sacrfcada é a de baxa renda, uma vez que representa a grande maora dos usuáros de ônbus e habta a perfera da cdade, portanto, sem condções de escolha de alternatva mas atraente. Por outro lado, se o preço das passagens for mantdo, a qualdade do servço oferecdo tende a car, estmulando a mgração dos usuáros de maor renda para o transporte ndvdual 4
22 (ALMEIDA, 2000). Com sso, almenta-se anda mas o círculo vcoso do congestonamento das vas urbanas. Até o momento, a dsputa travada pela preferênca de uso do espaço váro tem favorecdo o automóvel partcular. Entretanto, no geral, todos saem perdendo com o aumento dos congestonamentos e a conseqüente redução da mobldade no trânsto urbano, nclusve os própros usuáros do automóvel. Para romper este processo, com efeto de retro-almentação, entre outras meddas, é ndspensável nvestr na amplação e na melhora operaconal dos sstemas de transporte coletvo Interseções soladas Os estudos precursores no controle de tráfego em nterseções semafórcas foram apresentados por Greenshelds (1947) e pelo Hghway Capacty Manual (HCM) (1950). A prncpal dferença entre os dos trabalhos, está no conceto adotado para estmar a capacdade de fluxo. Greenshelds defne o fluxo máxmo através do ntervalo de tempo mínmo admssível entre dos veículos consecutvos de uma corrente de tráfego, denomnado por headway de saturação. Enquanto, o HCM referese ao fluxo máxmo admssível de veículos que pode ultrapassar uma determnada seção vára, durante uma hora de tempo de verde, ou fluxo de saturação. Este conceto de fluxo de saturação, também fo adotado por Webster, na década de 50, em suas pesqusas no campo da engenhara de tráfego, realzadas na Inglaterra. Todos os demas métodos e softwares de controle de trafego, desenvolvdos até hoje, adotam um dos dos concetos para defnção do fluxo máxmo admssível. Assm, os métodos de programação semafórca podem ser classfcados em dos grandes grupos: os que empregam o headway de saturação e os que utlzam o fluxo de saturação como referênca para desenvolver os algortmos do plano de snalzação lumnosa (PORTO, 1997). Com relação ao grupo do headway de saturação, o processo de cálculo do cclo é realzado de forma teratva. Defnda a seqüênca de fases, arbtra-se um valor para o cclo e em seguda calculam-se os respectvos tempos de verde e entreverdes. Estes tempos são calculados com base nos headways de saturação correspondentes aos movmentos permtdos, a partr de cada rua de acesso à nterseção e na localzação dos respectvos pontos de confltos das correntes de tráfego lberadas conforme a seqüênca de fases escolhda. Se o cclo resultante do somatóro dos tempos de verde e de entreverdes calculados não for gual ao prmero cclo arbtrado, nca-se o processo de teração, adotando-se um novo cclo. O processo se repete até o momento em que valor do cclo resultante for gual ao do cclo arbtrado. A qualdade 5
23 do atendmento dos fluxos é garantda pela escolha de uma probabldade de não haver sobrecarga, com base na curva de chegada dos veículos na nterseção.no caso de nterseção solada adota-se a curva da dstrbução de Posson. Segundo PORTO (1997), apesar de Greenshelds ser o ponero nos EUA, sua pesqusa teve maor desdobramento na Alemanha. Em 1956, Mäcke, Korte e Leuchbach publcaram um trabalho sobre análse de capacdade em vas urbanas, no qual apresentaram um método de programação semafórca com base nos estudos de Greenshelds. Hoje as dretrzes alemãs para nstalação de semáforos RTSA (1998), atualzadas perodcamente, adotam o headway de saturação como referênca de capacdade de fluxo. Com relação ao grupo do fluxo de saturação, o cclo e os tempos de verde são calculados com base nas taxas de ocupação crítca (relação entre o fluxo exstente e o fluxo máxmo admssível) de cada fase semafórca. O fluxo máxmo admssível é calculado a partr da adoção de um valor máxmo de fluxo teórco, que só ocorrera em condções ótmas de tráfego. Este máxmo teórco sera então alterado por fatores de nterferêncas exstentes no local da nterseção, que mudam o teto da capacdade de fluxo em condções ótmas. O método do HCM obteve maor dfusão dentro e fora das fronteras dos EUA. Este fato se deve não só à força nsttuconal do Transportaton Research Board (TRB), responsável pela publcação e dstrbução do manual, mas também, por este apresentar uma sére de tabelas com fatores de nterferênca no fluxo máxmo teórco, obtdos a partr de exaustvos levantamentos empírcos, além de apresentar dversos procedmentos de cálculo para dstntas stuações de tráfego e ser perodcamente atualzado. A últma publcação do HCM fo lançada no ano 2000 e nclu uma versão em undades métrca e uma nova versão do software HCS (Hghway Capacty Software) Corredores Os prncpas exos de lgação, entre zonas concentradoras de pólos geradores de vagens, são os trechos da rede vára urbana mas aproprados para a crculação do sstema de Transporte Coletvo de méda capacdade. Geralmente, estes corredores nterlgarem zonas de densa ocupação, logo possuem ntenso volume de tráfego. As nterseções váras exstentes ao longo do percurso são os verdaderos gargalos do trânsto, onde ocorrem os maores confltos e nterrupções no fluxo. A mpossbldade de evtar as nterseções urbanas em nível mpõe a nstalação de controles semafórcos para garantr a segurança e aumentar a capacdade de tráfego. 6
24 A melhora operaconal nas nterseções soladas, por meo da determnação de planos semafórcos otmzados, não garante necessaramente o menor tempo de vagem ao longo do corredor váro. Entretanto, é possível determnar uma coordenação dos semáforos para mnmzar os tempos perddos na espera da mudança dos estágos em snas fechados. Quanto ao desenvolvmento de métodos de coordenação semafórca em corredores, vale salentar os seguntes aspectos: Estes, em geral, estabelecem como meta a cração da máxma faxa de Onda Verde, para nclur o maor número de veículos no pelotão da sncronzação. Com sso, a redução do tempo de vagem no corredor é garantda, entretanto, esta melhora pode causar penaldade excessva para os fluxos das vas transversas. Portanto, para proporconar benefícos mas amplos, além do corredor váro, é ndspensável nclur na análse as conseqüêncas nos fluxos das ruas transversas; Foram concebdos para atender, em prmera estânca, ao desempenho do carro partcular. Portanto, são raras as pesqusas que abordam a possbldade de nclur o Transporte Coletvo nos benefícos da sncronzação; Mutas das varáves e fatores de nterferêncas empregados nestes métodos não representam adequadamente o comportamento do tráfego local, por terem sdo pesqusados em outros países. Além dsso, o acesso aos algortmos, equações e à lógca nterna dos programas é lmtada, restrngndo as mplementações ou adaptações mas efetvas Softwares Dalton (1994a) realzou uma extensa revsão bblográfca sobre modelos computaconas, na qual 41 programas para tratamento de nterseções semafórcas foram analsados. Em suas conclusões, Dalton apresenta aspectos pouco trabalhados nos softwares estudados que mereceram melhor atenção nos novos modelos de controle de tráfego em nterseções váras, entre eles destacam-se os seguntes: Com relação à modelagem: tratamento das travessas de pedestres, consderar o desempenho operaconal de coletvos e o comportamento dos motorstas; Com relação aos recursos do software: tornar o programa mas amgável ao operador nclundo processo nteratvo com caxas de dálogo, recursos 7
25 gráfcos, parâmetros default e nterrupção da execução do programa em pontos partculares para avalação do curso do modelo e eventual correção. A nterface gráfca para entrada e saída dos resultados, um dos aspectos menconados por Dalton, melhorou consderavelmente, pos na época do seu estudo anda não exsta uma bbloteca gráfca padrão de desenvolvmento. Em 1995, com o lançamento do sstema operaconal Wndows 95, ocorreu uma mgração de todos os softwares para ambente wndows, o que resultou na construção de um ambente mas amgável. Pelos motvos já menconados no tem e pelo fato da língua nglesa ser a de maor penetração nternaconal, o conceto do fluxo máxmo, em condções deas de tráfego adotado pela escola anglo-amercana, fo ncorporado por todos os softwares, de controle semafórco, mas referencados tas como MAXBAND, TRANSYT-7F, SYNCHRO, PASSER e HCS Estrutura da pesqusa O capítulo 1 apresenta o problema da pesqusa e aborda os motvos para escolha do tema. Estabelece a hpótese que sustenta o desenvolvmento da pesqusa. O capítulo 2 apresenta uma revsão do hstórco da utlzação do controle semafórco, os crtéros de mplantação, os componentes dos semáforos, os prncpas tpos e modos de operação, as abordagens dos smuladores de tráfego, os modelos de otmzação exstentes. O capítulo 3 descreve os prncpas algortmos de busca empregados pelos softwares de otmzação de trafego. Os softwares de otmzação off-lne pesqusados, com suas varáves de entrada e os resultados retornados. O capítulo 4 aborda o sstema de Transporte Coletvo por Ônbus, suas característcas operaconas e os prncpas tratamentos prortáros empregados no Brasl e em outros países. O capítulo 5 apresenta a metodologa adotada no desenvolvmento da pesqusa. Para elaboração e a concepção do método proposto adota-se como ponto de partda os algortmos do programa KOORD crados por PORTO JR. (1982). Será adconado o cálculo dos planos semafórcos para cada nterseção do corredor e maxmzação ou mnmzação de meddas de desempenho tas como atraso total, faxa de onda verde, entre outras. O captulo 6 aborta as conclusões e sugestões de temas para futuras pesqusas. 8
26 CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA 9

 sgnfca Precaução.")
27 2.1. Hstórco O prmero semáforo fo nstalado em Westmnster 1868, no Reno Undo (Webster e Cobbe, 1966). Inventado por J. P. Knght e nstalado na nterseção das ruas George e Brdge, próxmo do Parlamento de Londres, um snal destnado a orentar o tráfego de veículos, veículos de tração anmal e de pedestres. O sstema era composto de duas asas artculadas que, em funconamento, apresentava as posções horzontal e nclnada (45 ), alternadamente. Quando na posção horzontal sgnfca Pare e na posção nclnada (45 ) sgnfca Precaução. A note, no mastro acende um lampão a gás que reflete, nas respectvas asas, a luz vermelha que sgnfca Pare e a luz verde que sgnfca Precaução. A posção nclnada (45 ) ou Precaução sgnfca que as pessoas em veículos e em cavalos são advertdas a passar pelo cruzamento com cudado. Quando na posção horzontal ou Pare sgnfca que todos os veículos em todas as dreções devem permanecer parados, permtndo a passagem dos pedestres. Alguns meses depos da nstalação o lampão explodu ferndo o guarda que operava (SESSIONS, 1971; MUELLER, 1970) (Fgura 2.1). Fonte: SIGNALFAN.COM, 2004 e Fgura 2.1: Semáforo nventado por J. P. Knght em

28 O semáforo moderno movdo à energa elétrca é uma nvenção amercana. Em meados de 1912, o polcal Lester Wre de Salt Lake Cty nventou o prmero semáforo elétrco (Fgura 2.2). Fonte: SIGNALFAN.COM, Fgura 2.2: Semáforo nventado por Lester Wre em Em 5 de agosto de 1914, o Amercan Traffc Sgnal Company nstalou semáforos em cada canto das ruas 105th Street e Eucld Avenue em Cleveland. Baseado no desenho de James Hoge, ele tnha duas cores, vermelho e verde, e uma srene para alerta os motorstas da mudança de cores (Fgura 2.3). Fonte: Fgura 2.3: Semáforo nventado por James Hoge em Em outubro e dezembro de 1920, um polcal de Detrot, Wllam Potts, construu város semáforos com as cores vermelho, verde e amarelo, onde a cor vermelha sgnfca Pare, a verde sgnfca Sga e o amarelo sgnfca Precaução. 11
. O semáforo permaneceu funconando até 1924 e fez parte do prmero sstema de sncronzação de semáforos do mundo.")

29 Fo o prmero semáforo com três cores, quatro dreções e elétrco. Fo nstalado na nterseção das Woodward Ave. e Fort Street, Detrot, Mchgan em outubro de O desenho orgnal permanece nalterado até os das de hoje (Fgura 2.4). O semáforo permaneceu funconando até 1924 e fez parte do prmero sstema de sncronzação de semáforos do mundo. Este sstema englobava as nterseções entre as ruas Jefferson e Adams Street na Avenda Woodward e era operado manualmente de uma torre (MUELLER, 1970). Fonte: SIGNALFAN.COM, Fgura 2.4: Semáforo nventado por Wllam Potts em Em 1920, foram nstalados os prmeros snas trcolores em Nova Iorque. Dr. John F. Harrss, organzou um sstema com as cores vermelha, amarela e verde para controlar o tráfego na Ffth Avenue. A déa alcançou um estágo expermental já em feverero de As luzes eram modfcadas por um nterruptor. Por volta de 1922, o nventor Garrett Augustus Morgan, depos de testemunhar um acdente entre um automóvel e uma charrete, projetou um semáforo no formato de uma cruz e com asas que apresentavam três posções: Stop, Go e all-drectonal stop. O semáforo projetado fo submetdo a um estudo de patente no da 27 de feverero do mesmo ano. A patente fo concedda em 20 de novembro de 1923, nos Estados Undos, e logo depos sera concedda na Grã Bretanha e Canadá. O nventor vendeu os dretos para a General Electrc Corporaton pela quanta de $ dólares (Fgura 2.5). 12
30 Fonte: BELLIS, Fgura 2.5: Semáforo nventado por Garrett Augustus Morgan em A mudança de manual para automátco de tempo fxo fo rápda. Os semáforos de tempo fxo permtam defnr o nco e o fm das fases para serem mudadas alternadamente (PORTO, 1997). Em 1926, surgam no Reno Undo, os prmeros semáforos automátcos, não eram efcentes nas stuações onde o fluxo nas nterseções varava consderavelmente e logo semáforos programados, que alteravam o nco e o fm das fases ao longo do da, foram nstalados. A partr de 1930, começaram a serem testados semáforos que reagam ao tráfego, ou seja, atuados pelo veículo. O prmero semáforo com controle vecular fo fabrcado nos EUA. A detecção dos veículos era realzada por mcrofones. O prmero semáforo atuado por veículo em Londres, fo nstalado em 1932 (BULLOCK et al, 1999). Em 1935 surga o prmero sstema nterlgado, consttuído por controladores atuados por veículos. O advento da tecnologa do controle de processo computadorzado na década de 50 propcou a coordenação de um grande número de 13
31 semáforos em dversas áreas da cdade. Na década de 70, os operadores dspunham de algumas nformações provenentes dos detectores, que eram normalmente colocados nos prncpas cruzamentos. Então, passou-se a utlzar controle realmentado, baseado nas nformações dos detectores veculares. A ntrodução dos mcroprocessadores trouxe a possbldade de aumento da capacdade computaconal para os equpamentos controladores de tráfego (BATISTA, 2003) Crtéros de mplantação O controle semafórco é mplantado com objetvo de gerencar os confltos nas nterseções, ou seja, procura-se reduzr os atrasos e acdentes (WEBSTER, 1964). A estratéga utlzada é a lberação alternada de pelotões de veículos, com objetvo de controle e redução dos pontos de conflto das correntes de fluxo de veículos e pedestres e dos tempos desperdçados no processo de travessa da nterseção (PORTO JR, 1997). O Manual de Semáforos do Departamento Naconal de Trânsto (DENATRAN) defne os crtéros para a seleção de semáforos como forma de controle de uma nterseção. Esses crtéros baseam-se no volume do tráfego nas aproxmações, nas brechas oferecdas pela va prncpal, no número de aproxmações, no volume de pedestres, nos índces de acdentes, na progressão dos veículos através de váras nterseções semafórcas, na exstênca de áreas congestonadas, e em combnações destes crtéros (DENATRAN,1984) Termnologa Os veículos podem executar város movmentos em uma nterseção vára, porém, devdo um conflto espacal dos movmentos, não podem ser realzados smultaneamente. Através do traçado dos percursos dos fluxos é possível determnar os pontos de conflto das dferentes correntes de tráfego. Estes percursos são representados por lnhas que correspondem aos exos das faxas (Fgura 2.6). As correntes que se nterceptam são chamadas de confltantes ou ncompatíves, enquanto que as correntes que não se nterceptam são chamadas de compatíves ou não confltantes (PORTO JR, 1997). A fase é a porção do tempo de cclo que é alocado para um grupo de correntes compatíves. Cada fase é dvdda em estágos ou ntervalos, que são períodos da programação semafórca, de uma nterseção, durante os quas a ndcação lumnosa de todos os semáforos não se altera. Além das defnções sobre controle semafórco de nterseções apresentadas anterormente, são apresentados outros concetos mportantes para garantr uma 14
32 melhor compreensão da pesqusa (DENATRAN, 1984; PORTO JR, 1997, CARVALHO et al, 2000): Interseção ou cruzamento é o local onde duas ou mas ruas se cruzam e os possíves deslocamentos de Veículos nelas são chamados movmentos. Aproxmações ou pstas de acesso são os trechos de va que convergem para a nterseção. Tempo de cclo é o tempo referente a uma seqüênca completa de ndcações de verde, amarelo e vermelho de um semáforo ou grupo focal. Fase é a porção do cclo alocada para um determnado conjunto de movmentos não confltantes. Pel anotação amercana, a fase nclu o tempo de verde e o entreverdes que o segue. Intervalo é um período da programação semafórca de uma nterseção durante o qual a ndcação lumnosa de todos os grupos focas não se altera. Entreverdes é o tempo decorrdo entre o fm do verde de uma fase, que está perdendo o dreto de passagem, e o níco da outra, que está ganhando, é denomnado período entreverdes. A porção de verde ou splt de um cclo é a forma como ele está dvddo entre as fases, ou seja, é o conjunto de frações do cclo atrbuídas ao verde de cada fase. A defasagem (offset) de uma nterseção é o nstante do níco da luz verde em um dos semáforos da nterseção, meddo em relação a um relógo de referênca comum a todas as nterseções a montante e a jusante de um sstema. A defasagem se aplca na sncronzação entre nterseções que são operadas de forma coordenada como um sstema. O tempo de deslocamento é o tempo que um veículo gasta para percorrer a dstânca de um semáforo ao subseqüente. Fluxo de saturação é o fluxo máxmo de veículos que pode passar por um semáforo caso este permaneça aberto durante uma hora de verde nnterrupto. Efeto de pelotão: o pelotão representa um grupo de veículos que vajam a uma velocdade estabelecda por um veículo líder, mpedndo que os motorstas dos demas veículos do pelotão desenvolvam velocdade maor. No tráfego urbano, os pelotões são formados perodcamente pela alternânca dos snas lumnosos. O grupo de veículos em pelotão trafega ncalmente em regme de fluxo de saturação. Ao percorre, trechos város mas longos, o pelotão tende a se dspersar até que a nova nterrupção do 15
33 próxmo semáforo fechado, formando em seguda um novo agrupamento. A essa dspersão costuma-se denomnar de efeto de pelotão. A programação semafórca estabelece a seqüênca dos dretos de passagem, os estágos, e o tempo atrbuído a cada uma delas, tempo de verde. Os estágos são defndos pela determnação dos confltos dos fluxos, enquanto que o tempo de verde é calculado com base nos dados hstórcos de cada fluxo e com modelos de otmzação de tráfego. A Fgura 2.6, esclarece a dferença entre fase e estágo segundo a defnção do DENATRAN. Observa-se nas alternatvas 1 e 2, no Estágo 1, que os fluxos 1 e 2 são lberados smultaneamente até o momento da nterrupção do fluxo 2. Neste momento, ocorre a mudança da ndcação lumnosa de um semáforo, consdera-se uma mudança de estágo, do Estágo I para o II. Na alternatva 3 os fluxos 1 e 2 são nterrompdos smultaneamente, logo ocorre uma mudança de fase e de estágo. Fonte: PORTO JR,1997. Fgura 2.6: Dagrama de fases e estágos. 16
.")
34 2.4. Controladores de tráfego A autorzação dos movmentos, para veículos e pedestres que atravessam um cruzamento, é feta através de ndcações lumnosas dos grupos focas do semáforo, que recebem comandos para efetuar a comutação das lâmpadas. Os comandos para mudança de cores são envados por um dspostvo denomnado controlador de tráfego (Fgura 2.7). O controlador de tráfego é um equpamento que comanda o semáforo através do envo de pulsos elétrcos para comutação das luzes dos focos. Fonte: HVCEO, Fgura 2.7: Gabnete de um controlador de tráfego. Os prncpas modelos de controladores exstentes são: eletromecâncos, Tpo 170, NEMA TS1 e TS2, Texas Damond Controller e Advanced Traffc Controller (ATC) Equpamentos de coleta - sensores Os equpamentos de coleta de nformações de tráfego, sensores ou detectores, têm por objetvo fornecer nformações do tráfego para o controlador ou para uma central de tráfego. As nformações fornecdas pelos equpamentos são: contagem, classfcação, velocdade e alguns modelos conseguem medr o peso em movmento do veículo. Os sensores são separados em duas categoras: os ntrusvos, aqueles que são localzados sobre ou sob a psta de rolamento, e os não ntrusvos, são equpamentos que a nstalação e operação não nterferem no fluxo de trafego, geralmente, são localzados em postes ou pórtcos próxmos da psta de rolamento (SKSZEK, 2001). Segundo Batsta (2003), os prncpas tpos de sensores exstentes podem ser classfcados em: Pressão ou pneumátco: o peso do veículo causa um fechamento das placas de contato que permanecem seladas em uma chapa de pressão emborrachada, envando esta nformação ao controlador. Outro sensor gual é nstalado alguns metros á frente; tendo o tempo decorrdo entre os dos snas é fácl calcular a velocdade do veículo. 17
35 Magnétco: os detectores magnétcos operam baseados na varação das lnhas de fluxo do campo magnétco terrestre. Um rolo de fo com corpo de altíssma permeabldade magnétca é nstalado abaxo da superfíce do pavmento. O sstema detecta a varação das lnhas de fluxo e calcula a velocdade. Este tpo de detector não é recomendado para detecção de presença, pos em velocdades muto baxas o snal não é gerado. Sensores por radar e por ultra-som: os detectores por radar operam pelo prncpo chamado de Efeto Doppler. Dos mpulsos curtos são notados pelo sensor: um quando o veículo entra na zona de detecção e outro quando ele sa. O sensor e o equpamento eletrônco podem ser construídos juntos ou separados e são nstalados acma da va. Os detectores por ultra-som operam baseados no mesmo prncpo dos detectores por radar (emtem energa), só que dentro de uma área, e recebem uma reflexão emtda pelo veículo. Emssão de luz nfravermelha: os detectores por emssão de luz utlzam células fotoelétrcas, onde luzes nfravermelhas são emtdas em forma de fecho de alta ntensdade e sua nterrupção é detectada. Assnatura magnétca: quando um corpo metálco passa sobre o sensor, esta varação forma uma dstorção na nformação de magnetsmo meddo para cada veículo. O que possblta determnar além da passagem do veículo, também a sua classfcação. (automóvel, camnhonete, camnhão com dos exos, ônbus, etc.). É possível também se determnar com uma boa precsão a velocdade em um ponto de passagem, pela varação no comprmento de sua assnatura. Reconhecmento de magem ou vídeo: tem como prncpo de funconamento a utlzação de algortmos para processamento de magem, ou seja, permtem a dentfcação dgtal da presença de veículos em um determnado ponto. Os laços são vrtualmente colocados na própra magem, nos pontos escolhdos para analse através de um software. Com a combnação de város pontos de detecção é possível a medção de presença, ocupação, velocdade, tamanho da fla, tempo de vagem e detecção de acdentes. Laço Indutvo: é o mas usado, atualmente, por ser barato e confável. Um laço ndutvo é um fo dsposto em forma retangular, quadrada, ou redonda que fca no nteror do pavmento. As extremdades do fo são conectadas a um módulo detector. O módulo njeta um snal no laço a uma freqüênca entre 20 e 100 khz. O módulo do detector montora esta freqüênca denomnada freqüênca de ressonânca para determnar se há um veículo na área do laço. Sabemos que a ndutânca é defnda como a oposção a uma mudança no fluxo atual de corrente. 18
36 Quando uma corrente é aplcada a um condutor tal como o fo acma, um campo magnétco se forma em torno do fo. Se a fonte atual for removda, o campo magnétco va dmnundo no fo, que tenta manter o fluxo atual. Enrolando dversas voltas do fo em uma bobna, o campo magnétco é ntensfcado, e aumenta-se a ndutânca. Quando um veículo cruza o laço, o corpo do veículo nterage com o campo magnétco do laço fornecendo um trajeto condutor para o campo magnétco. Isto faz com que ndutânca do laço dmnua. A ndutânca dmnuída causa na freqüênca ressonante um aumento de seu valor nomnal. Se a mudança da freqüênca exceder o ponto ncal ajustado pelo ajuste da sensbldade, o módulo detector saberá que um veículo passou sobre o sensor. Skszek, em 2001, realzou uma pesqusa sobre os prncpas fabrcantes de equpamento de coleta de dados de tráfego. Nessa pesqusa, também avalou-se os prncpas tpos de equpamentos, tpo de sensor, dados coletados, as vantagens e desvantagens e o grau de satsfação dos equpamentos de contagem de trafego utlzados por cnqüenta Departamentos de Transporte amercanos. O anexo I apresenta os prncpas fabrcantes com os respectvos produtos de contagem de trafego, pelo tpo de sensor utlzado e nformações coletadas. A obtenção dos preços depende de dversos parâmetros: software, hardware, quantdade de pstas, dreções, comuncação e outros Tpos dos controles e operações dos semáforos O Federal Hghway Admnstraton, no Traffc Control System Handbook (FHWA, 1996; FHWA, 1995), categorzou as formas de controle em duas dreções: tpo do controlador representa como o semáforo responde as varações do tráfego local, podendo ser tempo fxo, atuado ou adaptatvo; tpo de operação representa a forma de operação do semáforo em relação à área onde se encontra nstalado, podendo operar ndependentemente ou como sstema. Geralmente, agrupado em três categoras: nterseção solada, corredores ou rede (área). A Tabela 2.1 mostra as possíves combnações de tpos e operação. Tabela 2.1. Tpos e operações de semáforos. Operação Interseção solada Corredor Rede Tpo Tempo fxo Atuado Adaptatvo 19
37 Modos de controle Exstem três modos de operação do controle semafórco são eles: Tempo fxo é o tpo básco de operação que pode ser nstalado. Nele os valores do tempo de cclo, a duração e a seqüênca das fases têm valores fxos, sendo calculados com base nos dados hstórcos do fluxo de veículos da nterseção. Qualquer alteração na programação deve ser modfcada mecancamente no controlador. Esse tpo de aparelhagem é nstalado em nterseções com volume de tráfego prevsível, estável e constante, ou onde o volume de pedestre é grande ou constante. Eles são mas baratos para adqurr, nstalar e manter do que os de tempo atuado. A defcênca deste tpo de controle está no fato de não se ajustar à flutuação do tráfego ao longo do da, ou seja, não responde às varações de tráfego. Entretanto, esta lmtação pode ser mnmzada, no caso de mudanças pré-estabelecdas na programação semafórca, para determnados períodos do da, durante os quas o volume do tráfego não altera sgnfcatvamente (FHWA, 1996; FHWA,1995; DAVOL, 2001). Tempo atuado este responde as varações de tráfego que, através de sensores na nterseção, determna qual o plano semafórco será adotado. Estes são nstalados onde a flutuação do volume de trafego é rregular ou onde se deseja mnmzar as nterrupções. Ele é consttuído por quatro componentes: os sensores, a undade de controle, as luzes de trafego e os cabos de conexão. Os sensores são colocados no pavmento, mas em alguns casos são posconados no poste do semáforo. O veículo passa pelo detector que nforma ao controlador o veículo. Exstem três tpos de controladores de tempo atuado (FHWA, 1995): Sem-atuados aplca um verde contnuo para a va prncpal, exceto quando o detector ndca a presença de um veículo na va secundára para entrar na nterseção. O detector somente será nstalado na va secundara (Fgura 2.8a). Totalmente atuados os detectores são nstalados em todas as aproxmações da nterseção, sendo muto utlzado quando o volume de veículos vara ao longo do da, tornando necessára a modfcação do plano semafórco (Fgura 2.8b). Volume-densdade - regstra e guarda as nformações do tráfego atual, como volume. Usando as nformações regstradas pode-se calcular ou recalcular a duração do mínmo tempo de verde baseado na demanda atual. 20
38 Fgura 2.8: Semáforos sem-atuados e totalmente atuados. O controlador atuado tem como prncpal característca a possbldade de estender o tempo de verde de uma fase. A Fgura 2.9 mostra como sto pode ser feto pela atuação do veículo. Necessta-se de três parâmetros: o mínmo tempo de verde, tempo estenddo e o máxmo tempo de verde. Embora a demanda, o verde é defndo para o menor tempo especfcado. Se um veículo é detectado no resto do tempo estenddo, o tempo de verde é estenddo na duração do tempo estenddo, sso pode ocorrer repetdamente como mostra a Fgura 2.9. O tempo de verde será termnado quando não ocorrer mas atuações no últmo tempo estenddo ou quando o máxmo tempo de verde for atngdo. O tempo estenddo é chamado de gap tme, pos o tempo é estenddo se um veículo tem um headway menor que o valor do tempo estenddo (DAVOL, 2001; TIAN, 2002). Fonte: DAVOL, 2001 Fgura 2.9: Extensão do tempo de verde em uma fase atuada. Outra característca do tempo atuado é a possbldade de pular uma fase, se não exste demanda por esta fase, ou seja, se não exstem veículos aguardando por 21
39 aquele movmento (determnado pelos detectores) o controlador pula a fase e va para a próxma seqüente. Tempo adaptatvo ou tempo real surgu devdo a dfculdade de se determnar uma programação semafórca que acompanha-se a varação do trafego em todos os níves. Ele é semelhante ao de tempo atuado, mas pode alterar mas parâmetros do que somente a duração do tempo de verde. Reponde as varações de tráfego em tempo real. Os prncpas ajustes fetos são o tempo de cclo e a dvsão das fases, que determna quanto do tempo de cclo é composta cada fase. A alteração basea-se nos dados coletados por cada aproxmação da nterseção, e estes dados são usados para estmar as condções da nterseção e responder em tempo real. A otmzação deste controlador está baseada na, alocação do tempo de verde em função do máxmo desempenho ou dos mínmos atrasos e paradas dos veículos (FHWA, 1996; FHWA,1995; DAVOL,2001) Operação de semáforos Em nterseção solada os semáforos de uma nterseção operaram sem consderar as eventuas nterferêncas exercdas pela operação de semáforos das nterseções adjacentes. O controlador pode ser de tempo fxo, atuado ou adaptatvo, no entanto, não é muto comum o emprego de controladores adaptatvos. No Brasl, a maora das nterseções operam com controladores de tempo fxo, sem-atuados ou totalmente atuados. A escolha do tpo está relaconada com os recursos dsponíves e dentre aquele que melhor atende aos objetvos propostos, como por exemplo, redução de acdentes, a mnmzação de atrasos e segurança. Em artéra ou corredor váro o controle do tráfego ao longo de trechos város tem com objetvo fazer a coordenação ou sncronzação de semáforos, através do aconamento progressvo dos tempos de verde nas nterseções snalzadas, permtndo que os veículos desloquem-se ao longo de uma rota, reduzndo o número de nterrupções da corrente de fluxo devdo à ocorrênca das fases de snalzação vermelha. Este efeto de sncronsmo é chamado de Onda Verde. Isto pode ser vsto no dagrama espaço-tempo na Fgura 2.10a, onde o exo horzontal representa o tempo e o exo vertcal representa espaço com as nterseções semafórcas ao longo do corredor. O dagrama espaço-tempo mostra que o aconamento do tempo de verde das nterseções do corredor pode ser tal que um veículo, vajando na velocdade programada, consegue trafegar todo o trecho da sncronzação e atngr as respectvas nterseções semafórcas durante o tempo de verde. A dferença de tempo entre o níco do tempo de verde de uma nterseção para o níco do tempo de verde da subseqüente 22
40 é chamada de defasagem. A coordenação de semáforos pode ser em ambas as dreções de tráfego (Fgura 2.10b) (DAVOL, 2001; PORTO, 1982 ; PORTO, 1984). a Uma dreção b Ambas as dreções Fgura 2.10: Coordenação de semáforos. Para possbltar a coordenação de semáforos de tempo fxo é necessáro adotar o mesmo tempo de cclo para todas as nterseções e determnar a defasagem para cada nterseção. Os semáforos atuados operam com o mesmo prncpo, porém são mas flexíves, permtndo que fases não coordenadas (como aquelas das nterseções secundáras que apresentam um pequeno volume ou as de gro à esquerda da arteral) sejam suprmdas ou estenddas baseadas na demanda. No entanto, sempre va exstr um tempo de verde, durante cada cclo, para manter a faxa de onda verde da progressão. Os semáforos adaptatvos, coordenados, podem otmzar meddas como tempo de vagem ou de parada no corredor, ao nvés de meddas de cada nterseção semafórca (DAVOL, 2001). As varáves envolvdas no planejamento e operação da coordenação de nterseções semafórcas em corredores são: velocdade, tempo de cclo, espaçamento entre semáforos e a efcênca da coordenação (STOVER, 1996). Rede (área) a operação em rede tem a extensão mas ampla dos controles, pos consdera o desempenho de um conjunto de nterseções semafórcas de uma determnada área. A operação em rede é uma extensão da operação em corredores que consdera a progressão para todos os veículos em todas as dreções de tráfego. Este modo de operação é efcaz quando não exste sentdo de trafego domnante na rede. O sstema permte a utlzação de controles de tempo fxo, atuado ou adaptatvo. Dependendo da complexdade e da quantdade de varáves envolvdas na otmzação, o adaptatvo pode demandar um tempo computaconal muto elevado para retorna a resposta em tempo real (FHWA, 1996). 23
41 2.7. Abordagens dos modelos de smulação de tráfego As abordagens dos modelos de smulação de tráfego podem ser agrupadas em modelagens macroscópcas, mcroscópcas e mesoscópcas. Macroscópca descreve o comportamento dos fluxos de tráfego ao nvés das nformações dos movmentos de veículos ndvduas. Por sto, estes modelos necesstam de menos recursos computaconas, porém são ncapazes de prever com precsão meddas de nível vecular, como consumo de combustível. Permte a compreensão das lmtações de capacdade dos sstemas város e a avalação de conseqüêncas de ocorrêncas que provoquem pontos de estrangulamento nos mesmos (SILVA, 1992). Os modelos macroscópcos são capazes de medr velocdade, fluxo e densdade (DIEKMANN, 2000). Mcroscópca analsa as nterações de veículo para veículo, dando velocdades contnuas ou dscretas e a posção de cada veículo. Permte o estudo de fluxos não necessaramente homogêneos ou nnterruptos. O tratamento ndvdualzado dos veículos exge maor quantdade de dados, recursos computaconas e tempo de processamento do que a abordagem macroscópca, porém resulta na mas realístca representação dos movmentos veculares na rede (DIEKMANN, 2000). Mesoscópca abrange aspectos dos modelos macroscópcos e mcroscópcos. As undades analsadas são grupamentos de veículos que se formam ao se deslocarem nos sstemas város, chamados pelotões, sso devdo bascamente em função da ntermtênca provocada pela operação semafórca (SILVA, 1992). Ela é útl, por exemplo, no estabelecmento de estratégas de coordenação semafórca. Normalmente, agregam-se os resultados das abordagens mcroscópcas para uso em abordagens de mesoscópcos, assm reduz-se o tempo de processamento. Para alguns autores, a análse mesoscópca não exste e seus objetos de estudo estaram enquadrados nas analses macroscópcas (DIEKMANN, 2000) Sstema de Transporte Coletvo por Ônbus O ônbus surgu no Brasl, após a Segunda Guerra Mundal, como meo de transporte nformal. Desde sua ntrodução até os das atuas, o ônbus tornou-se o meo de deslocamento mas mportante na maora das cdades brasleras. Isto ocorre em função das dfculdades de mplantação de outras modaldades de transporte, que 24
42 exgem nvestmentos de vulto, logo uma parte expressva da população urbana depende dretamente, para sua mobldade, do funconamento adequado do Transporte Coletvo por Ônbus. O transporte coletvo nfluênca nas atvdades econômcas em geral, que dependem do transporte urbano, para movmentar seus mercados de emprego, produtos e servços. Portanto, a operação do ônbus tem ser cada vez mas efcente (capacdade do sstema de utlzar os recursos dsponíves para realzar o servço) e efcaz (nível de qualdade alcançado na realzação deste servço) (ALMEIDA, 2000). O fornecmento de transportes para o atendmento das necessdades de movmentação dos habtantes (mobldade) de uma cdade envolve três elementos com comportamentos e nteresses dstntos: os usuáros, que desejam um nível de servço capaz de satsfazer todas as suas necessdades de conforto, segurança e pontualdade; os empresáros que procuram balancear sua receta com despesas operaconas, desfrutando de uma remuneração adequada para o captal nvestdo no setor; e a socedade, que objetva a proteção da qualdade de vda que possu. Esses nteresses são, na maora das vezes, confltantes e quando se tenta satsfazer os nteresses de um grupo, cram-se problemas para os outros. As atenções dos usuáros do transporte coletvo estão voltadas prncpalmente para o preço das passagens, o conforto proporconado pelo servço e o tempo de vagem (de porta a porta). Atualmente, exste o surgmento de uma conscentzação sobre a necessdade da regulardade da operação do sstema, ou seja, os usuáros se drgem aos termnas ou pontos de parada e precsam saber quando deverá chegar o próxmo veículo. A noção de confabldade no sstema está relaconada à exstênca ou não de ônbus dsponível para os deslocamentos e a necessdade do cumprmento de horáros com ntervalos de confança preestabelecdos pelas empresas ou pelo poder públco (ALMEIDA, 2000). O preço das passagens é o elemento crítco para a maora dos habtantes, pos os usuáros do ônbus correspondem à população de baxa renda, logo qualquer varação sgnfcatva nos valores tarfáros mplca um mpacto no orçamento famlar. Entretanto, a adoção de tarfas reduzdas que não acompanhem as constantes elevações dos preços em geral, no ntuto de permtr maores oportundades de emprego para as faxas de população com renda nferor, conduzra certamente a descaptalzação das empresas. A utlzação de subsídos por parte do Governo pode acarretar a nefcênca ou a rresponsabldade fnancera do setor. Uma alternatva para suavzar os aumentos das tarfas sera a adoção de meddas pelos empresáros ou pelo Poder Públco que permtssem a redução dos custos de operação das empresas. O valor da tarfa depende da qualdade do servço ofertado, traduzda em 25
43 termos de freqüênca de vagens, da tecnologa adotada e das condções de deslocamento. No que se refere ao conforto, o mas mportante aspecto, normalmente consderado pelos passageros, é a dsponbldade de um lugar para vajar sentado. A observação de outros requstos, tas como: uma boa ventlação, ausênca de ruídos e prncpalmente, controle da lotação do veículo, contrbuem para realzação de uma vagem agradável (ALMEIDA, 2000). O tempo de vagem, para o usuáro, é composto de três tempos: o tempo de acesso, que depende da dstânca entre orgem, destno e os pontos de parada; o tempo de espera, que depende da freqüênca do servço e de sua confabldade; e o tempo no veículo. O tempo no veículo pode ser decomposto em três, são eles: o tempo em movmento (tempo útl), o gasto nos pontos de parada e os atrasos (devdos a snas, congestonamentos, etc.). Os congestonamentos e suas repercussões sobre os transportes coletvos são amplamente debatdos e trazem no seu âmago o conflto sempre presente entre custo prvado e custo socal. Em geral, o usuáro do automóvel toma conhecmento apenas de seus custos operaconas. Todava, nos períodos em que as vas urbanas se encontram saturadas, cada automóvel adconal representa um acréscmo de custos para toda a coletvdade e, em partcular, para ônbus. Com a presença dos congestonamentos, a velocdade comercal dos ônbus dmnu e para oferecer um servço equvalente, é necessáro aumentar o número de veículos da frota com mpacto dreto nos custos operaconas, que são repassados aos usuáros através da tarfa. Em vrtude do controle sobre o preço das passagens, aparece uma deteroração na qualdade do servço oferecdo, o que levará os usuáros de maor renda a utlzar o transporte ndvdual. A dsputa travada pela capacdade lmtada das nossas vas urbanas tem apresentado como vencedor o usuáro do automóvel. A prncpal desvantagem do ônbus é a sua baxa capacdade quando comparado a outros modos de transporte como o metrô, porém o custo de mplantação é muto nferor em relação a estes. Nos últmos anos procurou-se mnmzar essa desvantagem empregando-se o ônbus Padron, ônbus artculados e bartculados, pos estes apresentam assentos mas confortáves, maor capacdade de transporte, pega-mãos para passageros em pé, corredores mas amplos para crculação nterna, portas mas largas, degraus mas baxos e área maor para acumulo de passageros antes da catraca, auxlado pelo emprego de estratégas operaconas tas como: prordade para o fluxo de ônbus nas vas (faxas e vas exclusvas) e no sstema de controle de tráfego (semáforos atuados pelos ônbus, sncronzação para Transporte Coletvo etc..). Os ônbus artculados e bartculados tveram problemas 26
44 com rao de curvatura mínmo necessáro em algumas vas, sendo o seu uso restrto a grandes corredores (ALMEIDA, 2000) Modelos de ônbus urbano Atualmente, exste uma grande quantdade de modelos de ônbus sendo utlzados no transporte urbano, com dmensões, capacdades, concepção e performance muto dversas em função do chass e do fornecedor da carrocera. No entanto, os dversos modelos de ônbus podem ser agregados em quatro tpos, conforme apresentado na Tabela 2.2: Tabela 2.2: Característcas dmensonas dos ônbus urbanos. Dmensões(m) Capacdade (pass) (*) Tpo do Veículo Comprmento Largura Altura Sentados Em pé Total Mcroônbus 4,75 8,50 2 2,5 2,25 2, Convenconal Standard 9,50 11,00 2,5 3, Padron 10,50 12,00 2,5 3, Artculado 16,00 18,00 2,5 3, Grande Porte Com reboque 22,00 2,5 3, Rodováros 9,50 2,40 2,70 3,00 3, Fonte : STPP - EBTU, Planejamento da Operação : característcas do Sstema, (*) depende do lay-out nterno do veículo. Mcroônbus Nos últmos anos houve um crescmento acelerado desse tpo de veículo, devdo à necessdade das empresas operadoras em recuperar a demanda que fo perdda para as vans. Hoje a sua partcpação, na frota das empresas é sgnfcatva. Mutas empresas argumentam que a rentabldade do mcroônbus é menor do que a do ônbus convenconal (NTU, 1998), mas algumas preferem reduzr as margens de lucro do que perder passageros. Ônbus Convenconal Este modelo predomna na frota braslera, sendo responsável há mutos anos pelo transporte coletvo de passageros nas cdades brasleras, porém já vem sofrendo algumas modfcações, entre elas destacam-se o conforto e segurança dos passageros. Os ônbus convenconas não são mas montados em chasss de camnhão, esta era uma prátca comum nas décadas de 50 e 60 e níco dos anos 70, porém há mutos anos que cada veículo possu chasss com característcas adequadas ao seu servço (VALTAS & NOVICKI,2005). Ônbus de Grande Porte A utlzação desses veículos é um pouco restrta, pos eles apresentam grandes dmensões que dfcultam seu uso em algumas cdades. É bastante utlzado em lnhas com grande demanda de usuáros, pos reduz o número de veículos necessáros para operação. Apresenta um custo ncal elevado, mas tem um custo por passagero transportado semelhante ao ônbus convenconal. 27
45 Ônbus Rodováros A maora é utlzada no transporte ntermuncpal ou nterestadual de passageros, lgações entre o centro da cdade e o aeroporto e em passeos turístcos, pos o nível de conforto é elevado e não se permte passageros vajando em pé. Possuem assentos ndvduas reclnáves, estofados, maor espaço entre os assentos, tratamento acústco, lumnoso e de crculação do ar, e em alguns casos luz ndvdual de letura. A Tabela 2.3 apresenta as velocdades operaconas deas, dos tpos de veículos de transporte coletvo, em função do nível de segregação em relação aos demas veículos que utlzam à va. Tabela 2.3: Velocdades deas para operação de ônbus urbanos. Tpo do Veículo Condções de Velocdade (km/h) Operação Comercal Operaconal Máxma Trânsto Mcroônbus Compartlhado Faxa exclusva Trânsto Compartlhado Ônbus Convenconal Faxa (Standard ou Padron) exclusva Psta exclusva Ruas reservadas Trânsto Compartlhado Trólebus Faxa exclusva Psta exclusva Ruas reservadas Fonte: EBTU, Planejamento da Operação:característcas do Sstema, Característcas operaconas do sstema Localzação e dstânca entre pontos de parada Os pontos de parada de ônbus são os locas stuados ao longo do tneráro das lnhas onde ocorrem as operações de embarques/desembarques de passageros. Antgamente, a localzação era determnada pelos usuáros lnderos ao tneráro, pos geralmente os pontos eram localzados em locas com grande aglomeração de pessoas. Em algumas stuações, a grande freqüênca de pontos de parada melhora as condções de acessbldade para o usuáro, porém prejudca a operação do servço e os usuáros que estão no nteror do veículo, devdo à sucessão de paradas. Por outro lado, pontos de parada muto afastados, além de contrbuírem para o aumento do tempo de camnhada, aumentam o tempo de permanênca nos pontos, em decorrênca do acumulo de passageros para embarque ou desembarque. 28
46 A correta localzação, a sua rápda vsualzação e o projeto adequado são fundamentas na operação, pos nterferem na oferta do servço e em outros aspectos relaconados à engenhara de tráfego - localzação do ponto de parada em relação à nterseção, planos semafórcos, capacdade da va, flas, congestonamentos e outros (EBTU, 1988). A localzação deal dos pontos de parada é aquela que mnmza o tempo de vagem para os passageros, ou seja, está relaconada com as áreas de maor concentração de demanda e a localzação das nterseções semafórcas. Outros fatores devem ser consderados, são eles: dsponbldade de espaço nas calçadas; volumes de tráfego; varação da demanda entre as dferentes lnhas operantes, vsando a possbldade de mplantação de paradas seletvas; possbldade de colocação de baas; condções topográfcas da va - nclnação e rao de curvatura (ESTEVES, 1982). Análses referentes às própras condções do transporte ofertado são necessáras: dstanca entre os pontos de parada, tempo de entrada e saída do ponto de parada, o tempo de permanênca no ponto de parada e a capacdade de atendmento do ponto. Segundo a EBTU, 1988, a dstânca ótma entre os pontos de parada pode ser determnada através da expressão: ( OT.Cp + ) Co.F.TM. 4.vp do = (4.1) dp.ca Onde: do : dstânca ótma entre os pontos de parada [m]; OT : ocupação méda no trecho [passagero/ônbus]; Ca : valor do tempo para passagero andando a pé [R$/h]; Cp : valor do tempo para passagero no ônbus [R$/h]; Co : custo operaconal do ônbus [R$/h]; F : frequênca de ônbus no corredor; TM : tempo perddo na aceleração e desaceleração [h]; vp : velocdade normal de marcha a pé [km/h]; dp : densdade de demanda no trecho [passagero/h/km]. No entanto, a formulação acma serve para analse de uma lnha, como na maora dos casos, o ponto é utlzado por outras lnhas, deve-se analsar o conjunto de suas localzações. A EBTU estabeleceu como referenca prelmnar para localzação dos pontos de parada, um espaçamento médo de 300 metros, consderando toda a extensão da lnha. Em casos especas recomenda os seguntes espaçamentos: áreas centras de 150 a 250 metros (quantdade maor de usuáros, logo uma melhor 29
47 condção de acessbldade), áreas comercas de 200 a 350 metros, corredores város de 300 a 500 metros (para não prejudcar o desempenho operaconal), áreas resdencas de 200 a 500 metros e em áreas rarefetas de 400 a 700 metros ou até paradas lvres (posconadas próxmas ao pólo gerador de vagem). Tempo de permanênca Está relaconado ao tempo para realzação das operações de embarque/desembarque dos passageros, mas exatamente ao tempo de desembarque, que é função das característcas da demanda de desembarque, e de forma ndreta, ao carregamento do própro ponto, que pode dfcultar a saída das pessoas (ESTEVES, 1982). Capacdade de atendmento do ponto É a quantdade de veículos que podem utlzá-lo ao mesmo tempo. É uma varável que deve ser consderada no cálculo do tempo de permanênca no ponto. A formação de flas faz com que alguns ônbus tenham que efetuar váras paradas, até que possam proceder as operações de embarque/desembarque de passageros, ou seja, este tempo é determnado pelo momento em que o ônbus entra na fla até ele se posconar na baa ou berço, é um atraso adconal somado ao tempo de parada no ponto. Para melhorar o desempenho operaconal da va e do ponto, pode-se realzar paradas seletvas, onde o ônbus para em pontos alternados, reduzndo a quantdade de ônbus por ponto. No entanto, pode aumentar o tempo de camnhada do pedestre até o ponto. Tempo de vagem O tempo de vagem representa o tempo que o ônbus leva para realzar a vagem de um termnal ao outro ou, no caso de lnhas crculares, voltar para o mesmo termnal, sendo função da velocdade, do tneráro da lnha e da quantdade de pontos de parada. Este tempo sofre nterferênca de dversos fatores, podendo-se destacar: grau de separação do Transporte Coletvo em relação ao tráfego geral, dstânca méda entre os pontos de parada, condção de rolamento proporconada pelo pavmento das vas, traçado geométrco do tneráro, tempo de embarque e desembarque, tempo perddo nos semáforos, tempo perddo para acesso ao ponto de parada e congestonamentos (SANTOS, 2003). O tempo de parada é resultante da soma do tempo de embarque/desembarque e do tempo para acessar e sar do ponto de parada (Fgura 2.11). Um estudo realzado pelo GEIPOT-EBTU (1976) constatou que o tempo de embarque/desembarque 30
48 nterfere no tempo de parada nos pontos e sofre nterferênca da altura/dmensões dos degraus, posção da catraca, forma de cobrança da tarfa, área de espera antes da catraca, característcas físcas dos passageros, entre outros fatores. Em geral, este tempo é admtdo como sendo gual a 2.5 segundos/passagero (embarque) e 2.0 segundos/passageros (desembarque) em flas ndvduas e ndependentes entre s. Outro estudo realzado pelo GEIPOT-EBTU (1982), para ônbus do tpo Padron, que possuem portas largas, flas duplas no acesso e degraus mas baxos, os valores caíram para 1.2 e 0.8 segundos/passagero, respectvamente. Fonte: ESTEVES, Fgura 2.11: Comportamento dos ônbus no ponto de parada. O estudo Transt Capacty and Qualty of Servce Manual (TRB, 1999) apresenta valores estmados para o tempo de embarque e desembarque de passageros por localzação e quantdade de portas (Tabela 2.4). 31
49 Tabela 2.4: Tempo de embarque/desembarque por tpo e quantdade de portas. Portas Embarque a Ônbus Quantdade Posção Pré-pago b Dnhero Desembarque (s) (s) (s) Convenconal Dantera Trasera Dantera Trasera Dantera e Trasera d Dantera e Trasera f 2,0 2,0 1,2 1,2 1,2 0,7 2,6 a 3,0-1,8 a 2, ,7 a 2,0 1,7 a 2,0 1,0 a 1,2 1,0 a 1,2 0,9 0,6 Artculado Dantera, centro e Trasera. Trasera Dantera e centro d 0,9 1 1,2 g - 0, ,8-0,6 0,4 Dantera, centro e Trasera e. Especas 6 3 Portas Duplas 0,5-0,4 a - Intervalo típco em segundos entre sucessvos embarques e desembarques. b - Também aplcado para pagamento na saída ou stuação de transferênca. c - Não aplcável com embarque pela porta trasera. d - Cada um. e - Duas portas traseras para embarque e. f - Menos portas para embarque/desembarque smultâneos. g Duas portas traseras para embarque e uma smples saída. Fonte: TRB, Prordade para Transporte Coletvo nas vas As prmeras regulamentações de prordade aos transportes coletvos, sobre os demas veículos, começaram em 1968, na Venna Conventon on Road Traffc, onde os mnstros de transportes Europeus se encontraram e fzeram as prmeras recomendações de prordade. A Alemanha e a Suíça, em 1970, foram os pases poneros na mplantação das recomendações da Convenção de Vena. Em seguda outros pases europeus regulamentaram a prordade para o transporte coletvo. Deste então, mutos outros países, como: Austrála, Japão, Estados Undos, Canadá e Brasl, regulamentaram a prordade sobre os demas veículos (TRB, 2003). Quando o ônbus dsputa espaço com os veículos partculares, na maora das vezes, ocorre uma redução da velocdade, o aumento do tempo de vagem, o aumento do consumo de combustíves, aumento dos custos operaconas, maor rregulardade do servço, desconforto dos passageros e prncpalmente uma redução da capacdade. Assm, estes fatores nterferem na operação e elevam os custos que compõem a tarfa. 32
50 As meddas de prordade para transporte coletvo por ônbus são tratamentos especas das vas, da snalzação e de outras facldades que vsam crar condções prvlegadas para a crculação do transporte coletvo no sstema váro urbano, ou seja, usualmente conhecdo como vas e faxas de tráfego de uso exclusvo dos veículos de transporte coletvo e com dspostvos de snalzação, sobretudo semafórca, que dão preferênca de passagem ao fluxo de veículos coletvos nas nterseções (NTU, 2002). A prordade para transporte coletvo por ônbus tem por objetvo reduzr o tempo total de vagem do usuáro, ajudar na transferênca modal do transporte partcular para o coletvo, atender a um grande fluxo de pessoas a uma velocdade satsfatóra e prncpalmente aumentar a efcênca do sstema de transportes. Os tratamentos adotados para prordade estão lgados à utlzação do espaço váro e resultam na modfcação da stuação exstente, através da cração de canas especas para o transporte coletvo. Os prncpas tratamentos são: faxas exclusvas, pstas exclusvas (canaleta e busway), va segregada e prordade nas nterseções semafórcas (MELO, 1976) (NTU, 2002). Para melhor descrever estes tratamentos é necessáro dentfcar o grau de separação que eles proporconam em relação ao tráfego geral e, consequentemente, o grau de controle que se pode ter sobre a movmentação dos veículos de transporte coletvo, ou seja, determnar o nível de segregação da va. A Tabela 2.5 mostra os níves de segregação, tpos de tratamento e característcas baseadas no estudo da NTU, Tabela 2.5: Níves de segregação e tpos de tratamento/operação da va. Nível de Segregação Varações Característcas Tpo de tratamento / Operação 1 Tráfego msto Faxa exclusva Psta exclusva (canaleta, busway) Va Segregada No fluxo No contrafluxo Va exclusva Em va de múltplos usos Fonte: Assocação Naconal dos Transportes Urbanos (NTU), Veículos de transporte coletvo crculam junto com o tráfego geral, sofrendo grandes nterferêncas longtudnas e transversas. Cruzamentos em nível freqüentes. Veículos do transporte coletvo trafegam em faxa exclusva, mas sem elemento de separação físca do tráfego geral. A faxa exclusva costuma estar na lateral da va (embora possa estar também no centro) e ter ou não faxa dupla para ultrapassagem junto aos pontos de parada. Número consderável de cruzamentos em nível. Veículos do transporte coletvo trafegam em faxa exclusva com elemento de separação físca do tráfego geral. A faxa pode estar no centro ou nas lateras da va e ser ou não duplcada para ultrapassagem (especalmente junto aos pontos de parada). Poucos cruzamentos em nível. Veículos do transporte coletvo trafegam em va totalmente segregada, não sofrendo nterferêncas longtudnas ou transversas de qualquer tpo. Não há cruzamentos em nível. Nesta tabela surgem dos concetos que foram adotados da pesqusa realza pela CNT, 2002, que são as nterferêncas: 33
51 Longtudnas - causadas por outros veículos que se movmentam ou estão estaconados na mesma dreção em que trafega o veículo de transporte coletvo, ao longo da va. Transversas provocadas pelo fluxo de veículos ou pessoas que crculam em passagens ou vas oblquas àquela em que crcula o transporte coletvo Tráfego msto Corresponde ao mas baxo nível de segregação de tráfego e não há um tratamento váro especfco para o transporte coletvo. A nfra-estrutura é compartlhada por todos os modas (automóves, veículos de carga, motoccletas, etc.). Este tratamento só se aplca em corredores com baxos volumes de tráfego geral ou de transporte coletvo, sendo o mas aplcado nas cdades brasleras, devdo ao seu baxo custo de mplantação e planejamento Faxa exclusva As faxas exclusvas são faxas de trafego reservadas ao uso exclusvo do transporte públco coletvo por ônbus, sendo delmtadas por uma demarcação no pavmento, com tnta, ou tachões para evtar a nvasão de outros veículos. As separações mas utlzadas são os tachões e a pntura no pavmento, pos estes dspostvos de separação não segregam totalmente a faxa em relação ao fluxo de tráfego geral, logo podem ser temporaramente compartlhadas com outros veículos para acesso a propredades lnderas, movmentos de conversão permtdos, etc. Os prncpas objetvos são: alvar as defcêncas exstentes na operação, aumentar a velocdade operaconal, dmnur o tempo de vagem, maor segurança e confabldade no servço ofertado; atrar os usuáros dos automóves; em relação ao meo-ambente, reduzr a polução atmosférca, sonora e vsual; e em função da ordenação de tráfego, dmnur o número de acdentes no sstema váro (ESTEVES, 1982). Para justfcar a mplantação de uma faxa exclusva, é necessáro que o tráfego esteja próxmo da capacdade máxma da va (nível de saturação), capaz de nterferr no desempenho do sstema de transporte de passageros, e que exsta uma razoável concentração de lnhas de ônbus, refletdos pela demanda. Além desses, outros fatores devem ser verfcados (MELO, 1976; ESTEVES, 1982; NTU, 2002): 34
52 Cenáros de crescmento do centro de atvdades urbanas, em relação ao tneráro do ônbus; Se a decsão levar em conta a quantdade de passageros benefcados e não apenas a capacdade de escoamento de veículos, a faxa exclusva tende a se mostrar mas vável, pos os modos coletvos transportam muto mas passageros por área de va utlzada, gerando fluxos de veículos bem menores do que as modaldades ndvduas. Prevsão de aumento de demanda; Mesmo com baxo volume de veículos coletvos, pode ser vável a mplantação de uma faxa exclusva uma vez que a va se encontre próxma da saturação; Uma análse das condções operaconas do sstema; Um levantamento da dsponbldade de rotas alternatvas para alocar o tráfego de automóves; Possbldade de regulamentação das operações de carga e descarga e de acesso de veículos às propredades lnderas à faxa exclusva e probção do estaconamento junto à calçada; e Fornecer uma relação custo/benefco razoável. Além dsso, é fundamental que sejam estabelecdas as característcas físcas e as condções operaconas do sstema, enfocando todos os elementos envolvdos, bem como suas nter-relações, para que se possa proceder a uma avalação prelmnar de sua vabldade de mplantação. As faxas exclusvas são classfcadas de acordo com os crtéros de tpo de va em que é nserda, posção de mplantação e orentação do tráfego com relação ao sentdo de fluxo da va. Normalmente, são localzadas em vas expressas ou arteras, mplantadas ao longo do meo-fo no lado dreto ou esquerdo ou na regão central da va, e operadas no sentdo do fluxo ou contrafluxo ou de uma manera reversível. Faxa exclusva ao longo do meo-fo, no sentdo do fluxo. As conversões do tráfego geral à dreta devem ser restrngdas para mnmzar nterferêncas e confltos com o fluxo dos veículos de transporte coletvo que trafegam na faxa exclusva posconada junto à calçada. Pelo mesmo motvo, as operações de carga e descarga e de acesso de veículos às propredades lnderas, à faxa exclusva, devem ser regulamentadas e o estaconamento junto à calçada deve ser probdo (NTU, 2002) (Fgura 2.12). 35
53 ÔNIBUS ÔNIBUS Ponto de ônbus Fonte: Assocação Naconal dos Transportes Urbanos (NTU), Fgura 2.12: Faxa exclusva ao longo do meo-fo, no sentdo do fluxo. Faxa exclusva ao longo do meo-fo, no contrafluxo. Nessas faxas o ônbus crcula no sentdo oposto ao do fluxo da va. Para mnmzar os problemas de orentação de tráfego, mplanta-se à esquerda do fluxo normal, mantendo a regra geral de crculação em vas de mão dupla. Os prncpas objetvos são conservar as rotas de ônbus exstentes, quando a va passa a ser de mão únca, para não prejudcar o atendmento aos usuáros lnderos do transporte coletvo; fornecer novo servço em vas de mão únca; utlzar a capacdade útl da va no sentdo contráro ao fluxo, no horáro de pco; e o encurtamento de tneráros em áreas com vas de mão únca. Quando não há possbldade de se mplantar um bnáro próxmo à operação do transporte coletvo, a faxa no contrafluxo também se torna uma opção nteressante a estudar. As operações de carga e descarga e de acesso de veículos às propredades lnderas à faxa exclusva devem ser regulamentadas e o estaconamento junto à calçada deve ser probdo (Fgura 2.13). Ponto de ônbus ÔNIBUS ÔNIBUS Fonte: Assocação Naconal dos Transportes Urbanos (NTU), Fgura 2.13: Faxa exclusva junto ao meo-fo, no contrafluxo. Faxa exclusva junto ao cantero central A mplantação, desse tpo de faxa, requer vas mas largas, com refúgos e calçadas para pedestres, pos os passageros precsam cruzar outras faxas de tráfego para o servço de embarque/desembarque. Ela permte mnmzar as nterferêncas com o tráfego geral, pos mplementa-se em vas de mão dupla com elevado volume 36
54 de conversões à dreta, onde a mplantação de faxas à dreta torna-se dfícl e o posconamento central da faxa exclusva permte reduzr o mpacto desses movmentos sobre a operação do transporte coletvo. Para sua mplantação necesstase que a va seja sufcentemente larga, tal que permta a pavmentação de uma faxa central; a largura da va deve comportar pelo menos duas faxas de tráfego geral, ou uma para essa fnaldade e outra para estaconamento permtdo; largura sufcente para construção das estações de embarque e desembarque de passageros; e probção ou canalzação para faxas lateras das conversões confltantes (Fgura 2.14). A faxa exclusva junto ao cantero central é uma opção nteressante sempre que os padrões exstentes de uso e ocupação do solo ao longo da va exgem acessos freqüentes às propredades lnderas. Apesar de essa medda estar classfcada no grupo 2, com um nível de segregação relatvamente baxo (Tabela 2.5), é possível elevá-la ao mesmo desempenho das pstas exclusvas se for mplantada em va arteral, de trânsto rápdo, com poucas nterferêncas transversas de tráfego. ÔNIBUS ÔNIBUS ÔNIBUS Ponto de ônbus ÔNIBUS Fonte: Assocação Naconal dos Transportes Urbanos (NTU), Fgura 2.14: Faxa exclusva junto ao cantero central. Verfcar faxa exclusva A tabela 2.6 apresenta as vantagens e desvantagens das faxas exclusvas. 37
55 Tabela 2.6: Vantagens e desvantagens das faxas exclusvas. Faxa Vantagens exclusva No fluxo Contra Fluxo Cantero Central Baxo custo e tempo da mplantação; Facldade de estaconamento dos veículos de transporte coletvo urbano nas paradas junto às calçadas; e Facldade de acesso para passageros realzarem embarque e desembarque nas calçadas. Por ter sentdo contráro ao do fluxo de tráfego geral, sofre menores problemas de nvasão ou de nterferênca do tráfego geral na faxa; e Não sofre nterferêncas devdo a operações de embarque e desembarque de passageros de veículos de passeo. Não sofre nterferênca das operações de carga e descarga realzadas junto às calçadas (meo-fo); Não sofre nterferênca do embarque de passageros de veículos de passeo; Não sofre nterferênca do acesso de veículos às propredades lnderas no lado dreto da va; Não afeta as conversões de outros veículos à dreta; Permte a lberação do estaconamento junto ao meo-fo dreto; Permte obter maores velocdades operaconas para o transporte coletvo; e Faclta a programação de semáforo com prordade para o transporte coletvo. 38 Desvantagens A efcênca da medda depende fortemente da probção de estaconamento e da dscplna do tráfego geral no respeto à faxa exclusva; e Sofre nterferênca dos servços de operação de carga e descarga; do embarque de passageros de veículos de passeo; do acesso de outros veículos às propredades lnderas e das conversões à dreta de outros veículos. Implca em nsegurança maor para a movmentação de pedestres, caso não haja tratamento adequado. Requer maores nvestmentos em meddas e dspostvos de segurança; Dfculta a operação de carga e descarga e de acesso às propredades lnderas no lado esquerdo da va; Requer maores cudados na snalzação, na mplantação dos dspostvos de separação da faxa exclusva e no tratamento das nterseções; Sofre nterferênca do acesso de outros veículos às propredades lnderas; Interfere e sofre nterferênca das conversões de veículos à esquerda; e O planejamento das fases e tempos de semáforo requer cudados especas. Necessdade de maor nvestmento em equpamentos de segurança; Dfculta a mplantação de retornos ou conversões à esquerda; Dependendo do projeto arqutetônco, pode confgurar a formação de uma barrera físca ao longo da va, segregando espaços urbanos adjacentes; e Requer fscalzação constante para evtar que veículos de transporte prvado nvadam as faxas exclusvas. Fonte: Fonte: Assocação Naconal dos Transportes Urbanos (NTU), 2002.
56 Psta exclusva (canaleta, busway) As pstas exclusvas são caracterzadas pelo fluxo nnterrupto, uso exclusvo por ônbus e pstas separadas do tráfego geral por meo de obstáculos físcos tas como: canteros, muretas barreras, grades, etc. Podem compreender uma ou mas faxas de tráfego, no caso de todas as faxas reservadas para o uso do transporte coletvo chama-se de va exclusva, sendo um caso especal da psta exclusva. A Fgura 2.15 mostra a planta de uma psta exclusva na parte central da va e com fluxo em ambos sentdos. Ponto de ônbus ÔNIBUS ÔNIBUS Ponto de ônbus Fonte: (SHEN et al,1998). Fgura 2.15: Psta exclusva. A mplantação, geralmente, é realzada na parte central de vas arteras, em ambos os sentdos de crculação, em casos excepconas, dependendo das característcas de uso do solo, físcas da va, do trafego e de operação do veículo de transporte coletvo, pode ser mplantada do lado dreto ou esquerdo da va, junto à calçada. O nível de segregação é alto, mplcando maor custo de mplantação e mpactos na regão atendda. O fluxo de veículos acomodados não deve ser nferor a 60 veículos por hora (NTU, 2002), o que benefca uma elevada quantdade de usuáros do transporte coletvo. Esse tpo de medda, com alto nível de segregação reduz as nterferêncas transversas, permte a utlzação de veículos com capacdade maores e raconalza a operação do servço, resultando numa grande capacdade de transporte, como exemplo verfca-se no sstema TransMleno de Bogotá (TRANSMILENIO, 2004), na Colômba, com capacdade superor a passageros por hora por sentdo. A segregação é feta por barreras físcas, o que requer dspostvos para retrada dos veículos no caso de defetos ou acdentes. Verfcou-se maor ncdênca desses eventos próxmos dos pontos de parada, então, sugere-se, se possível, uma área de reserva nos pontos para acomodação de veículos. 39
57 O nível de segregação elevado garante maor efcênca da medda de prordade ao reduzr as nterferêncas com os demas veículos. As prncpas vantagens e desvantagens das pstas exclusvas estão lstadas na Tabela 2.7. Tabela 2.7: Vantagens e desvantagens das pstas exclusvas. Vantagens Impõe um nível de segregação e prordade maor do que no caso das faxas exclusvas, sem segregação físca; Proporcona maor velocdade operaconal para os veículos do transporte coletvo urbano do que as faxas exclusvas, prncpalmente no caso das que são posconadas junto às calçadas; Não sofre nterferênca dos servços de operação de carga e descarga de mercadoras; Não sofre nterferênca do embarque de passageros de veículos de passeo; Não sofre nterferênca do acesso às propredades lnderas; Não afeta e não sofre nfluênca das conversões à dreta, possbltando estaconamento ou carga e descarga no caso de faxas centras; e Necessta pouca fscalzação do uso da psta. Fonte: Assocação Naconal dos Transportes Urbanos (NTU), Desvantagens Requer mplantação de áreas para pedestres em todas as paradas por motvos de segurança; Requer dspostvos especas e snalzação para travessas de pedestres que podem mplcar na redução de velocdade; Requer a elmnação de conversões à esquerda para o tráfego geral, no caso de faxas centras; Pode confgurar a formação de uma nova barrera físca ao longo da va, segregando fortemente áreas urbanas adjacentes;e Implca em maor custo e tempo de mplantação em relação às meddas anterores Va exclusva As vas exclusvas devem ser utlzadas em segmentos de reduzda extensão, geralmente nas áreas centras ou no entorno de grandes pólos geradores de vagem, preservando acesso especal a veículos de servço (correos, concessonáras de servços públcos, bancos, etc.) e às garagens exstentes. Os problemas relaconados às operações de carga e descarga podem ser soluconados pela regulamentação de horáros específcos, fora dos horáros de maor carregamento do transporte coletvo (NTU,2002). As vas devem apresentar: Predomnânca de uso e ocupação por comérco e servços; Interlgação dreta com o sstema váro, possbltando trajetos dretos do transporte coletvo; e, Acesso facltado às áreas de pedestres. 40

58 Outra condção mportante, para vablzação desta medda, é a exstênca de va paralela operando no mesmo sentdo de tráfego, a ser destnada ao tráfego geral. As prncpas vantagens e desvantagens das vas exclusvas estão lstadas na Tabela 2.8. Tabela 2.8: Vantagens e desvantagens das vas exclusvas. Vantagens Reduzdo prazo de execução e baxo custo de mplantação; Propca elevada prordade para o transporte coletvo urbano; Permte maores velocdades operaconas para o transporte coletvo urbano; e Amplação de espaço destnado à movmentação de pedestres. Fonte: Assocação Naconal dos Transportes Urbanos (NTU), Desvantagens Normalmente exstem dfculdades nsttuconas e de caráter operaconal para mpor restrção muto ampla à crculação de outros veículos; Dfculdade de acessos a garagens exstentes em móves stuados ao longo da va; e Maor necessdade de fscalzação Curb extensons Este tpo de tratamento é muto efcaz em vas onde exste estaconamento ao longo do meo fo, elevado volume de tráfego e pontos de ônbus no meo fo, pos o ônbus perdera um tempo na entrada do ponto, devdo a dfculdade provocada pelo estaconamento, e na saída em vrtude da espera por oportundade de volta a faxa de tráfego, como mostra a Fgura Este tratamento basea-se no prolongamento da calçada até o fm da faxa destnada ao estaconamento ao longo da va. Fonte: TRB, 1999 Fgura 2.16: Curb extensons. 41
59 As vantagens são: redução do tempo perddo para acessar e sar do ponto de ônbus, amplação do numero de vagas de estaconamento ao longo do fo, devdo a redução da área de manobra no ponto de ônbus e reduz a dstânca de cruzamento para os pedestres. No entanto esse tratamento necessta de pelo menos duas faxas destnadas ao tráfego de veículos, pos quando o ônbus parar no ponto, para efetuar o embarque e desembarque de passageros, os veículos atrás fcaram parados até o térmno do embarque/desembarque (TRB, 1999) Prordade nas nterseções semafórcas A prordade para o transporte públco coletvo por ônbus nas nterseções semafórcas tem por objetvo reduzr o atraso, e conseqüentemente aumentar a velocdade operaconal. Os semáforos, na maora das cdades, são dmensonados para mnmzar o atraso total de todos os veículos na nterseção. No entanto, esta analse não é ótma, pos, consderando-se, a quantdade de pessoas por veículo, verfca-se que, o atraso de uma pessoa no ônbus não equvale ao de uma pessoa no veículo partcular. Assm, um ndcador pode ser o atraso total de pessoas no lugar de veículos atrasados, pos representa o mpacto sofrdo pelos usuáros da rede de transportes. O atraso para o transporte coletvo por ônbus ocorre na ausênca de prordade nos semáforos (Fgura 2.17). A trajetóra do ônbus é apresentada no dagrama espaçotempo, e a barra, na horzontal, representa o semáforo com os cclos ao longo do tempo. Se o ônbus encontra o semáforo no vermelho, o atraso é acumulado até surgr o aconamento do tempo verde e o veculo prossegue. As estratégas de prordade nos semáforos tentam reduzr o atraso de duas maneras: reduzndo a probabldade do ônbus encontrar o semáforo no vermelho, e, se sto ocorrer, reduzndo o tempo de espera até o níco do verde (DAVOL, 2001; SHEN et al, 1998). Fgura 2.17: Trajetóra do veículo sem prordade. 42
60 Classfcação das prordades A prordade pode ser classfcada em duas categoras: prordade passva, obtda através de modfcações manuas nos tempos semafórcos para benefcar o ônbus e mnmzar a nterferênca dos outros veículos, e prordade atva, quando as modfcações nos tempos semafórcos realzam-se através de sensores que captam, com antecedênca, a presença do ônbus na faxa (TRB et al, 1999). A Tabela 2.9 mostra os dos tpos de prordades com o tpo e descrção de cada tratamento. Tabela 2.9: Tpos de tratamento por tpo de prordade. Tratamento Descrção Ajuste do tempo de cclo Redução do tempo de cclo nas nterseções soladas Colocam-se mas estágos mantendo o Dvsão das fases Prordade tempo de cclo orgnal. passva Coordenação dos semáforos. Sncronzação dos semáforos com prordade para o ônbus Extensão da fase Aumenta-se o tempo de verde da fase. Detecção antecpada Redução do tempo de verde de outras fases Fase especal Adção de uma fase para ônbus. Supressão de fase Retrada da fase sem prordade. Prordade A fase do ônbus é ncada quando os atva Estratéga ncondconal outros ntervalos são satsfetos Igual a anteror em certas condções, Estratéga condconal porem é usada para determnar quando a fase do ônbus devera começar. Fonte: (TRB et al, 1999). Além dessas duas categoras de estratégas de prordades exste uma tercera chamada de real-tme, que tenta alocar uma prordade baseada na otmzação de crtéros de desempenho, prncpalmente atraso. As estratégas de real-tme observam as condções de chegada do veículo (passageros e ônbus), que entram no modelo de tráfego, o qual avala dentre os város planos semafórcos, o mas favorável para a stuação, ou otmza o plano semafórco atual em termos de duração e seqüênca das fases. As prordades atvas devem ser mplementadas em nterseções que operam abaxo da capacdade, pos as modfcações na programação semafórca que acontecem a cada momento que o ônbus passa na nterseção, não poram, sgnfcatvamente, o nível de servço da nterseção (TRB et al, 1999). A Fgura 2.18 mostra a mplementação da prordade atva utlzando equpamento para detecção do ônbus na va (por exemplo: transponder) ou o ônbus com equpamento que possa transmtr um peddo de prordade para o semáforo. 43
61 Ônbus aproxma-se da nterseção no tempo vermelha. Controlador semafórco Controlador detecta a chegada do ônbus e antecpa no tempo verde. Controlador semafórco Ônbus passa no tempo verde Controlador semafórco Fonte: (TRB et al, 1999). Fgura 2.18: Prordade nas nterseções semafórcas. Além dos equpamentos de detecção ou dentfcação dos veículos coletvos nas aproxmações detector com laço magnétco, transponders com ou sem códgo de dentfcação do veículo, antenas receptoras, GPS e dspostvos smlares - o sstema atuado de semáforos tem como elemento prncpal o software de gerencamento e processamento das nformações recebdas e execução da ordem. Em função de parâmetros programados, dados recebdos e estratéga de prorzação adotada, eles 44

62 procedem às mudanças de fases nas nterseções. Anda, dependendo das característcas de tráfego das nterseções semafórcas, a prordade dada ao transporte coletvo pode ser condconal, com lmtações mpostas por varáves controladas, como: tempo decorrdo desde a últma prordade concedda, lmtação do tempo de extensão de fase, comprmento de fla, pontualdade da lnha, etc; ou ncondconal, quando a prordade é dada ndependente de qualquer varável de controle, sendo também conhecda como prordade absoluta Queue jump Neste tratamento os ônbus evtam longas flas de veículos nas nterseções utlzando faxas da esquerda ou da dreta, sendo geralmente as faxas da esquerda reservadas para o ônbus e da dreta reservadas para gro à dreta da nterseção (TRB et al, 1999). O tempo de verde, do semáforo referente à faxa reservada, é aconado antes do semáforo destnado ao tráfego normal, possbltando a saída do ônbus na frente do tráfego normal. A Fgura 2.19 mostra o desenho da nterseção e a operação deste tratamento. Fonte: (TRB et al, 1999). Fgura 2.19: Queue jump. A vantagem desse tratamento é a redução do tempo perddo nas flas e o fato de saltar na frente dos outros veículos. Esta medda provoca a redução do tempo de 45
63 verde das outras fases, necessta de semáforos com sensores ou detectores para dentfcar a presença de ônbus na faxa, os motorstas de ônbus devem fcar alerta para este ntervalo de tempo de verde e a faxa da esquerda ou dreta deve exstr e ser maor do que a fla formada pelos outros veículos Consderações fnas Neste capítulo apresentaram-se as característcas físcas e operaconas do sstema de transporte coletvo e os tpos de prordades empregadas. As prordades procuram reduzr o tempo de vagem no corredor, para o transporte coletvo. O tempo de vagem, no corredor, é nfluencado pela dstrbução e localzação dos pontos de parada, pelo tempo gasto nas operações de embarque/desembarque, tempo de entrada/saída nos pontos de parada, pela dsposção do projeto geométrco váro que favoreça a crculação do transporte coletvo sobre os demas veículos que trafegam no corredor e pela mplementação de meddas de prordade nas nterseções semafórcas. Este capítulo apresentou um hstórco da evolução dos controladores de tráfego, os concetos de termos empregados na pesqusa, os tpos de sensores de coleta, tpos dos controles e operações dos semáforos e as abordagens dos modelos de smulação de tráfego. 46
64 CAPÍTULO 3 - ALGORITMOS E APLICAÇÕES 47
65 3.1. Introdução Os algortmos de buscas podem ser smples ou sofstcados. Ao se pensar em um problema altamente combnatóro, uma opção sera analsar todas as combnações possíves para conhecer a melhor. Se o problema possu um unverso de dados pequeno, esta é a manera correta de se procurar a melhor solução, mas os problemas reas, normalmente, possuem um número de combnações muto extenso, o que torna nvável a análse de todas as combnações, uma vez que o tempo computaconal exgdo fca mpratcável. Para aperfeçoar as buscas ncorporam-se heurístcas que procuram encontrar soluções ótmas em um tempo computaconal razoável. No entanto, não se consegue defnr se esta é a solução ótma, nem quão próxma ela está da solução ótma. A heurístca é adconada através de regras, funções heurístcas, que tentam determnar qual o melhor camnho até a solução. A função heurístca é uma função de avalação, que avala a qualdade e/ou o custo de um determnado estado, com base em algum conhecmento que se tem sobre a natureza do problema (RICH; KNIGHT, 1993). A palavra heurístca vem do grego heursken, que sgnfca descobrr, que também é a orgem da palavra eureka, dervada da famosa exclamação de Arqumedes, herka (de Descobrr ), proferda quando ele descobru um método para determnar a pureza do ouro (RICH; KNIGHT, 1993) As buscas heurístcas ou algortmos heurístcos foram desenvolvdos com a fnaldade de se resolver problemas de elevado nível de complexdade em tempo computaconal razoável Algortmos aplcados na engenhara de tráfego Na maora dos casos, os algortmos heurístcos são baseados na maxmzação ou mnmzação de alguns aspectos do problema. Na engenhara de tráfego a função objetvo pode ser o atraso, efcênca da onda verde, faxa de onda verde e outras. A segur serão apresentados os prncpas algortmos de buscas utlzados nos softwares de engenhara de tráfego Algortmos de busca exaustva A busca exaustva (ou Brtsh Museum Search) faz parte do grupo conhecdo como busca cega. A busca exaustva consste em um método que percorre todo um vetor (array) ou árvore usando um algortmo de busca em profunddade e largura, com o objetvo de que a busca não pare enquanto o elemento buscado não seja encontrado. O vetor não precsa estar ordenado, pos a busca exaustva compara cada 48
66 elemento com a chave procurada. Sem dúvda é o método de busca mas efcente, porém não o mas efcaz dependendo do tamanho do vetor. Na engenhara de tráfego, estes algortmos calculam e comparam a aptdão dos valores seleconados para todos os cenáros de possíves planos semafórcos. Nota-se que a desvantagem deste algortmo está na quantdade de combnações possíves das varáves envolvdas a serem otmzadas, o que pode demandar um tempo computaconal muto elevado. A vantagem é que todos os cenáros são analsados. Alguns softwares usam em determnado processo buscas exaustvas combnada com outros algortmos de busca Algortmo Hll-Clmbng (Subda da colna ou da montanha) O algortmo Hll-Clmbng é classfcado como algortmo de melhoras teratvas, e é utlzado para a resolução de problemas, cuja descrção do estado contém toda a nformação necessára para a solução, ou seja, o camnho até a solução é rrelevante. O nome do algortmo derva da analoga com o andarlho que está perddo no escuro em uma montanha e deseja chegar até o topo da montanha. Mesmo no escuro, o andarlho sabe que cada passo para cma é um passo na dreção certa (SANTANA, 2002). Este algortmo mantém somente um estado (o mas promssor) na memóra. O algortmo nca defnndo-se um cenáro ncal e uma varável a maxmzar ou mnmzar. O algortmo gera dos novos cenáros através do ncremento e decremento da varável seleconada, com um passo estabelecdo, e em seguda calcula-se a aptdão dos dos novos cenáros gerados e compara com o cenáro ncal. Assm, obtêm-se os dos melhores cenáros que passam a ser base, e, conseqüentemente, a dreção de novas terações. O algortmo contnua este processo até que os dos novos cenáros gerados não sejam melhores que o cenáro base. Abaxo está a formulação do Algortmo Hll-Clmbng (DELGADO, 2003) Atrbur o estado_ncal ao estado_corrente se o estado_corrente está ncludo no estado meta a meta fo atngda repetr até (estado_corrente esteja ncludo no estado meta ou até não haver nenhum operador a ser aplcado ao estado_corrente) Escolha um operador que anda não tenha sdo aplcado ao estado_corrente aplque-o operador se for o estado meta a meta fo atngda break senão se o novo_estado for melhor que o estado_corrente transforme-o em estado_corrente 49
67 Fgura 3.1: Busca Hll-Clmbng. A desvantagem é que dependendo do estado ncal e da heurístca empregada o algortmo pode encontrar uma solução ótma ou pode não encontrar a solução que se espera, uma vez que, a solução encontrada pode ser um máxmo (ou mínmo) local, o que ocasona encerramento da busca (Fgura 3.1). O algortmo atnge a solução ótma se a função de otmzação é unmodal, ou seja, possu somente um pco o um vale. Nos platôs ou planaltos, o algortmo va "andar" aleatoramente nessa regão, sso acontece quando todos os estados sucessores têm mas ou menos o mesmo valor (Fgura 3.1). A vantagem do algortmo é que este não consome muta memóra, pos não armazena todos os nós expanddos, apenas o nó que melhora o estado atual (o nó que possua melhor heurístca do que a do estado atual). Uma característca desta mplementação é que os estados promssores, que não apresentam uma heurístca que melhore a atual, não entram na lsta de possíves nós para expansão, representando uma economa de memóra Busca por satsfação de restrções A satsfação de restrções lda com os problemas defndos sobre domínos com valores dscretos ou contínuos, do qual fazem parte os domínos fntos, sendo atualmente as mas utlzadas em mutas áreas do conhecmento. Para satsfação das restrções sobre domínos fntos usa-se uma combnação de técncas para a preservação de consstênca, propagação de valores e pesqusa com retrocesso. Cada varável possu assocado um conjunto fnto de valores nteros, ao qual é dado o nome de domíno da varável. Os valores do domíno que levam as nconsstêncas são removdos do domíno das varáves durante a fase de propagação, enquanto que pela pesqusa se tenta nstancar cada varável do problema (TAVARES, 2000). 50
68 Um busca por satsfação de restrções caracterza-se por possur um conjunto X = {x1, x2,..., x } de varáves a serem nstancadas, para cada varável x um conjunto fnto D = {d1, d2,..., dm} de valores possíves (o seu domíno) e um conjunto R = {r1, r2,..., rn } de restrções que condconam os valores que as varáves podem assumr smultaneamente. Estas varáves são, normalmente, desgnadas por varáves de domíno e são representadas pelo par <x, d >, onde x é o símbolo que dentfca a varável e d é um conjunto fnto desgnado por domíno de (REIS, 1999; RUSSELL et al, 1995). Nesse tpo de problema, a seqüênca de passos para atngr o estado fnal é na maora dos casos rrelevante. Identfca-se um valor para cada varável de tal manera que todas as restrções sejam respetadas. Uma manera smples de resolver esse tpo de problema é utlzar a técnca gerar e testar: Escolher um valor para cada varável do problema (etapa 1). Verfcar se as restrções são respetadas. Se elas são, termnar. Senão voltar à etapa 1. A escolha de cada nova proposta de solução pode-se usar o retrocesso cronológco (backtrack). Sejam X 1, X 2,..., X n as n varáves que compõem o problema. Prmero, escolhe-se um valor para cada varável nessa ordem. Se for precso voltar à etapa 1, volta-se à últma varável que anda contém valores no seu domíno que não foram escolhdos. Selecona-se o próxmo valor do domíno que não fo seleconado até agora. Para todas as varáves que vêm depos na seqüênca, recomeça-se a seleção a partr do níco do domíno Mnmzação de confltos Essa técnca é uma combnação do Hll-Clmbng com satsfação de restrções. Do Hll-Clmbng, ela usa a déa de escolher o melhor estado sucessor. Das técncas de resolução por satsfação de restrções, ela usa o prncípo de representar o problema por um conjunto de varáves e restrções sobre essas varáves. Um estado é representado por uma nstancação completa das varáves. Como no Hll-Clmbng, se o estado não é o estado fnal (nesse caso, se exstem restrções voladas), dentfcamos o melhor estado sucessor. O que muda em relação ao Hll-Clmbng orgnal é a manera de dentfcar o estado sucessor. Prmero, dentfca-se as varáves envolvdas em confltos, sto é, varáves cujo valor vola uma restrção. Para cada uma delas, consderam-se os outros valores que pode receber. E para cada valor possível calcula-se o número de confltos que ele causara. Escolhe-se a varável e o valor que causam o menor número de confltos (CARVALHO, 2005). 51
69 Técncas de programação matemátca As técncas de programação matemátca, como programação lnear e ntera, necesstam de uma especfcação completa da função objetvo junto com todas as restrções do modelo de tráfego na forma matemátca (equações ou desgualdades). Estas técncas estão baseadas em procedmentos sstemátcos que são projetados para encontrar um pequeno subconjunto de todos os cenáros possíves de modo ntelgente. As técncas de programação matemátca são aplcadas somente quando um modelo matemátco fechado exste. Quando aplcada esta técnca atnge a solução ótma Algortmos genétcos Os algortmos genétcos (AGs) foram pela prmera vez especfcados na década de setenta, por John Holland da Unversdade de Mchgan, é uma das técncas de ntelgênca artfcal, utlzada como alternatva à busca exaustva. Os problemas de otmzação podem ser vstos como buscas em espaços de soluções, logo consdera-se a busca como a procura da melhor solução. Os algortmos genétcos pertence à classes dos chamados algortmos evoluconáros. Os AGs são algortmos que buscam, de forma aleatóra e utlzando um modelo baseado em fenômenos naturas, uma solução ótma em um espaço de potencas soluções (SPILLMAN, 1993). O seu objetvo é explorar o espaço de busca na determnação de melhores soluções, permtndo que os ndvíduos na população evoluam com o tempo. Cada passo do algortmo no tempo, na escala evolutva, é chamado de geração. Partndo de uma geração ncal, normalmente crada aleatoramente, o algortmo executa contnuamente o segunte laço prncpal (CARVALHO, 2005): 1) Avala cada cromossomo da população através do cálculo de sua aptdão, utlzando a função de avalação (etapa de avalação); 2) Selecona os ndvíduos que produzrão descendentes para a próxma geração, em função dos seus desempenhos apurados no passo anteror (etapa de seleção); 3) Gera descendentes através da aplcação das operações de cruzamento, crossover e mutação sobre os cromossomos seleconados no passo anteror, crando a próxma geração (etapa de reprodução) e 4) Se o crtéro de parada for satsfeto, termna e retorna o melhor cromossomo até então gerado, senão volta ao passo 1. 52
70 A Fgura 3.2 apresenta o algortmo de forma esquemátca. Fgura 3.2: Estrutura básca de um AG smples. Bascamente, um AG mantém uma população de cromossomos (soluções) que evolu e se modfca devdo aos cruzamentos entre estes e, em menor parte, devdo às modfcações nduzdas pelo meo-ambente (mutações genétcas). Na Natureza, os ndvíduos mas aptos são os que apresentam maores probabldades de sobrevvênca. Para a smulação deste tpo de comportamento, o AG utlza uma função de avalação que classfca como mas ou menos aptos os város elementos da população. As mutações genétcas, que verfcam-se em cada ndvduo, são smuladas forçando alterações aleatóras nos ndvíduos da nova geração. O objetvo é consegur uma população que contenha pelo menos um ndvíduo que satsfaça as condções requerdas à partda. Nota-se que um AG mantém ao longo da sua execução um conjunto de soluções, o que dfere de outros algortmos heurístcos de busca aleatóra como Hll Clmbng. A nefcênca, ou mesmo falha das aplcações de AGs, encontra-se lgada a dos fatores prmordas: uma codfcação ncal nadequada ou operadores nadequados que podem, mas cedo ou mas tarde, destrur a relação ncalmente mposta entre a codfcação e o problema ncal. Um dos problemas, anda em aberto, consste em reconhecer quas as característcas da codfcação ncal que podem ser 53
71 melhor exploradas pelo AG. Uma codfcação não adequada ao problema só pode ser detectada após verfcação expermental. Os AGs foram já aplcados, com bastante sucesso, em problemas de otmzação como: a lgação dos nós de uma rede, escalonamento de tarefas, controle adaptatvo, otmzarão das consultas a bases de dados, etc. Também os problemas de busca e aprendzagem consttuem domínos por excelênca, para a aplcação de AGs Coordenação dos semáforos. A coordenação semafórca consste no aconamento progressvo dos tempos de verdes das nterseções semafórcas de um corredor, formando uma faxa de verde contnua ou onda verde, que permte os veículos se deslocar ao longo de uma rota sem as nconvenentes nterrupções, das fases de vermelho. Os softwares de coordenação de semáforos são dvddos em duas categoras: off-lne e on-lne. Nesta pesqusa serão apenas apresentados os off-lne Modelos de otmzação off-lne Com o avanço da nformátca, os modelos computadorzados têm substtuídos as confgurações e otmzações dos planos semafórcos manuas. Estes modelos utlzam como dados séres hstórcas e smulam para obter um ótmo plano semafórco que maxmze a faxa de onda verde ou, mnmze ou maxmzar uma função objetvo, baseada em meddas de desempenho, como: o atraso, as paradas, o consumo de combustível, custo operaconal e outras. O método de maxmzação da faxa de onda verde consste ajustar os nícos de verde das dversas fases, em um dagrama espaço-tempo, de forma que a maor quantdade de veículos possa atravessar os cruzamentos semafórcos de um corredor, a uma velocdade unforme de projeto, sem ser parado nos semáforos (LUSTOSA, 1981). Estes métodos necesstam de uma quantdade menor de dados, tas como: fases, espaçamento entre as nterseções, velocdade de percurso, volumes e fluxos de saturação nas aproxmações. Porém, essa quantdade menor de dados resulta numa modelagem smplfcada do tráfego, não consderando os efetos da dspersão dos pelotões e as contrbuções dos movmentos de conversão das nterseções secundáras. Os métodos que procuram maxmzar ou mnmzar função objetvo baseada em meddas de desempenho (atraso total, número de paradas, consumo de combustível, e outras) necesstam de um conjunto de dados de entrada maor e mas complexo, devdo à necessdade de dentfcar os movmentos à montante de cada nterseção, porém tal dfculdade resulta numa representação mas fel do tráfego para obtenção dos planos semafórcos (OLIVEIRA, 1997). 54
72 As componentes báscas desse procedmento envolvem um modelo de fluxo de tráfego e um algortmo de otmzação de determnadas meddas de desempenho. A segur são apresentados os programas de coordenação de semáforos MAXBAND Este programa fo desenvolvdo por LITTLE, em 1966, e utlza técncas de programação lnear e ntera (KRAMMES et al, 1988; PILLAI et al, 1995) para otmzação da faxa de onda verde, calculando os planos semafórcos em artéras e redes trangulares. O MAXBAND tem como saídas o tempo de cclo, as defasagens, velocdades, e seqüênca das fases, para maxmzar a soma da faxa de onda verde em ambas as dreções. A vantagem do MAXBAND é que ele oferece um ntervalo para o tempo de cclo e a velocdade. Além das outras desvantagens dos métodos de maxmzação de faxa de onda verde, ele não trata os fluxos de ônbus e a pouca utlzação prátca (PEARSON, 2001; PAPAGEORGIOU et al, 2003) PASSER II O PASSER (Progresson Analyss and Sgnal System Evaluaton Routne) é um programa desenvolvdo pelo Insttuto de Transportes do Texas, da Texas A&M Unversty, para o Departamento de Transporte do Texas. A prmera versão fo lançada em 1974, com nome PASSER II (Tool II - arteres) (EGHTEDARI, 2001). A versão PASSER II 80 é um programa que utlza um modelo heurístco, baseado em gráfcos para otmzação da faxa de onda verde, para calcular os planos semafórcos em vas artéras. Usa uma versão modfcada da equação de atraso de Webster para aproxmar o efeto dos pelotões (PEARSON, 2001) e um método de procura exaustva sobre o ntervalo de tempo de cclo defndo pelo usuáro. As saídas são tempo de cclo, seqüênca das fases, duração das fases, defasagens, dagrama espaço-tempo, velocdade que maxmze a faxa de onda verde em ambas as dreções e calcula meddas de desempenho que ndcam a qualdade da faxa de onda verde obtda, dscutdas no PASSER V. As vantagens são a flexbldade para vara o tempo de cclo e a faxa de onda verde. As desvantagens eram a falta de dados de emssão ou consumo de combustível, que foram ncorporadas na versão 90. A versão 80 era para plataforma MS-DOS e a versão 90 para plataforma MS-Wndows. 55
73 KOORD O programa KOORD, desenvolvdo por PORTO, 1982, tem como objetvo estender para veículos de Transporte Coletvo os benefícos da faxa de onda verde em um corredor váro, mas também admte a possbldade de coordenação smultânea para os veículos partculares ou ndvduas. Em prncípo, sto é possível quando se cra uma onda verde prmára para os veículos partculares e uma onda verde secundára para o Transporte Coletvo, esta últma defasada da prmera no valor de um cclo por nterseção snalzada. O KOORD fo desenvolvdo em lnguagem Fortran e era para plataforma MS-DOS. Utlza um modelo heurístco para otmzação da faxa de onda verde baseado no gráfco espaço-tempo e um algortmo de busca exaustva. O requsto para o emprego do programa é a exstênca de faxas exclusvas para ônbus ou VLT, segregando os fluxos de ambos e a exstênca de apenas uma lnha de transporte coletvo crculando no corredor (PORTO, 1982). Os dados de entrada são: o tempo de cclo, quantdade e a dstanca entre as nterseções em ambos os sentdos para os veículos partculares e coletvos, a velocdade méda dos veículos partculares e coletvos em ambas as dreções, um índce de prordade de faxa de onda verde para as dreções, os tempos de verde e vermelho efetvos e os tempos gastos nos pontos de paradas dos coletvos no percurso entre as nterseções semafórcas consecutvas. Os dados de saída são: as defasagens de cada semáforo e as ampltudes das faxas de onda verde em ambas as dreções de fluxo, para os veículos coletvos e partculares, respectvamente. As vantagens são a pouca quantdade de dados de entrada necessáros e a prordade para transporte coletvo. Além, das desvantagens dos métodos de maxmzação da faxa de onda verde, este não nclu o cálculo dos tempos semafórcos, não calcula atraso, não possu meddas de desempenho, tanto a entrada e a saída são em arquvos textos e a lmtação de uma únca lnha de ônbus, o que é uma lmtação forte para a realdade braslera, uma vez que pode nvablzar a mplantação da coordenação em mutas stuações RT-TSD 3.0 (Tme Space Dagram) O RT-TSD desenvolvdo pela FORTRAN Traffc Systems Lmted é um programa que utlza um modelo heurístco, baseado no gráfco espaço-tempo e um algortmo de busca exaustva, para otmzação da faxa de onda verde e calcula os tempos semafórcos. O cclo e os tempos das fases são calculados com base no método de Webster e o nível de servço é com base no HCM. As saídas são: o tempo 56
74 de cclo, seqüênca das fases, duração das fases, defasagens, dagrama espaçotempo e a faxa de onda verde em ambas as dreções TRANSYT (TRAffc Network StudY Tool) O TRANSYT fo desenvolvdo por Denns I. Robertson, 1967, no Reno Undo, quando trabalhava na Plessey Automaton Company. Após o desenvolvmento, ele entrou para o Road Research Laboratory, que depos veo a se chamar Transport and Road Research Laboratory (TRRL), em Crowthorne, Berkshre, no Reno Undo. A prmera versão do programa fo escrta em lnguagem de máquna. No ano segunte, Robertson com colegas, escreveram o códgo na lnguagem FORTRAN (ROBERTSON, 1969 e HALE, 2005). O modelo contnuou sendo atualzado pela Brtsh Transport and Road Research Laboratory (TRRL) entre 1968 (TRANSYT-2) e 1978 (TRANSYT-7). O TRANSYT-7 fo base para a versão amercana, TRANSYT-7F (TRAffc Network StudY Tool, verson 7, Federal), desenvolvda pelo Centro de Pesqusa de Transportes da Unversdade da Florda (COURAGE et al, 1991). No entanto, o desenvolvmento contnuou em ambas as versões. Hoje, a versão amercana é o TRANSYT-7F release 10.2 e a versão brtânca é o TRANSYT 12. O TRANSYT-7F é um dos softwares de coordenação semafórca off-lne mas conhecdos e empregados. Composto por um modelo macroscópco determnístco de smulação de tráfego e por algortmos de buscas heurístcas e algortmos genétcos (HALE, 2005). A otmzação das fases e das defasagens é baseada na maxmzação ou mnmzação da função objetvo, índce de desempenho ou Performance Index (PI), que pode ser a combnação lnear do número de paradas e do atraso sofrdo pelos veículos nas dversas aproxmações da rede de nterseções semafórcas, consumo de combustível, excesso de custos operaconas ou oportundades de progressão. Em geral, TRANSYT-7F sempre tenta maxmzar o PI, a menos que o índce de desutldade (DI) seja seleconado como o PI. O DI é a combnação do atraso, paradas, fla e consumo de combustível, e tem que ser mnmzado. Outras funções objetvo que envolvem progressão ou processamento devem ser maxmzadas (HALE, 2005). A rede vára é representada no TRANSYT por nós e nterconectados por lnks. Cada nó representa uma nterseção semafórca e cada lnk representa uma aproxmação controlada por um grupo focal (Fgura 3.3). 57
75 Fonte: VINCENT et al., Fgura 3.3: Exemplo de rede no TRANSYT. Os ônbus podem ser modelados explctamente ou mplctamente. A modelagem explcta é realzada atrbundo lnks separados para os ônbus. Esses bus lnks podem ser totalmente separados para smular faxa exclusva, ou compartlhados para smular a operação em tráfego msto. A prordade pode ser atrbuída por um peso ndvdual alto para o atraso e/ou paradas nos bus lnks. Na maora dos casos é recomendada a modelagem mplícta, prncpalmente na operação em tráfego msto. Nela uma taxa do fluxo de saturação é codfcada para representar as característcas de nérca e dmensões do ônbus, conforme o Hghway Capacty Manual. Assm, os ndcadores de desempenho, e também os planos semafórcos, podem refletr o mpacto da operação de ônbus. Se a quantdade de ônbus no lnk for elevada, podese ajustar um spatal headway na modelagem, para responder pelo efeto do comprmento do veículo e desempenho da fla (HALE, 2005) PASSER V -03 O PASSER V 03 é a ultma versão do software desenvolvdo pela TTI (Insttuto de Transportes do Texas) para programação semafórca de artéras. Além da coordenação de duas ou mas nterseções semafórcas em uma arteral, também possu característcas báscas para analse e programação de nterseções soladas. Os planos semafórcos são obtdos para maxmzar a faxa de onda verde ou mnmzar o atraso total. Na otmzação o PASSER V usa algortmos de procura exaustva, mnmzação de nterferênca e algortmos genétcos. Como os outros programas, o PASSER V calcula a duração das fases de cada semáforo baseado no método de Webster. Então aplca-se um método de otmzação para ajuste dessas durações com objetvo de 58
76 mnmzar o atraso na nterseção. Em seguda executa-se o algortmo de otmzação da faxa de onda verde para obter as defasagens e as seqüêncas de fases que retornem a maor faxa de onda verde em ambos os sentdos. A otmzação da faxa de onda verde começa pela seleção de um cclo. Depos calcula-se as defasagens na dreção A, e em seguda procura-se mnmzar a nterferênca da faxa de onda verde A na oposta B, ajustando-se a seqüênca de fases e as defasagens (CHAUDHARY, 2003). A faxa de onda verde máxma é obtda pela fórmula: Total Band = G A + G B I Onde: Total Band : faxa de onda verde total (dreção A+ dreção B) GA : Menor verde na dreção A; GB : Menor verde na dreção B; I : Mínma nterferênca possível na faxa de onda verde. Depos de obter a melhor faxa de onda verde na dreção B, o programa ajusta as duas faxas de acordo com a prordade adotada pelo usuáro. Neste momento algortmo de mnmzação de nterferênca procura um pequeno sub-conjunto de todas as possíves combnações de tempos semafórcos. A segur, o software calcula o atraso com base na formulação do HCM, e as meddas de desempenho efcênca e acessbldade da faxa de onda verde. A efcênca e a acessbldade são meddas que expressão a qualdade da faxa de onda verde obtda para as ambas as dreções. A efcênca é o percentual do cclo usado pela faxa de onda verde e a acessbldade é o percentual do tempo de verde mínmo da dreção usado pela faxa de onda verde. Na teora, a máxma faxa de onda verde não pode ser maor que o menor tempo de verde da dreção. A efcênca e acessbldade são expressas pelas fórmulas da Tabela 3.1 (CHAUDHARY, 2003). Tabela 3.1. Meddas de desempenho - efcênca e acessbldade. Uma dreção Duas Dreções B ( B A + BB ) Efcênca (%) = *100 Efcênca (%) = *100 c 2.c B ( B ) Acessbl dade (%) = * 100 A + BB Acessbldade (%) = mn.ve mn.ve + mn.ve ( ) A B *100 Onde: B faxa de onda verde [s] c cclo [s] B A Faxa de onda verde no sentdo A B B Faxa de onda verde no sentdo B mn.ve menor verde efetvo das nterseções mn.ve A menor verde efetvo no sentdo A mn.ve B menor verde efetvo no sentdo B Fonte: CHAUDHARY,
77 Nota-se que o a faxa de onda verde aumenta com o aumento do tempo de cclo, no entanto, a efcênca pode aumentar ou dmnur ou permanecer nalterada. A qualdade da onda verde pode ser expressa pela efcênca como mostra a tabela 3.2 (ENGELBRECHT, 1997): Tabela 3.2. Qualdade onda verde em função da efcênca. Efcênca (*) Qualdade 0 12% Rum 13 24% Razoável 25 36% Bom % Ótmo *Méda de ambas as dreções. Fonte: ENGELBRECHT, O PASSER II-90 tnha uma tendênca de escolher os tempos de cclo maores. Os pesqusadores da TTI concluíram que sto ocorre devdo a otmzação da porção de verde, pos procura-se atrbur mas tempo de verde para a va prncpal, logo a otmzação da faxa de onda verde apresentara valores maores nas meddas de desempenho. Assm, a TTI optou por não nclur a otmzação da porção de verde. Notou-se também que o algortmo de mnmzação de nterferênca termna antes de encontrar a melhor solução, devdo a natureza da heurístca do algortmo que somente consdera um sub-conjunto de todas as possíves soluções. Isto fo resolvdo no PASSER V (CHAUDHARY, 2003) SYNCHRO O SYNCHRO, desenvolvdo pela Traffcware Inc., é um programa que utlza o atraso como base para analse e otmzação dos tempos semafórcos em artéras e rede. Ele mnmza um parâmetro chamado percentual do atraso, que é um peso médo do atraso correspondendo a 10, 30, 50, 70 e 90 percentual do volume de tráfego (KAMARAJUGADDA et al, 2003). A função objetvo, também, mnmza as paradas e o tamanho da fla, aplcando-se penaldades para estas meddas. A representação da rede vára é smlar ao TRANSYT-7F, onde o nó representa uma nterseção semafórca e cada lnk representa uma aproxmação. O SYNCHRO utlza um algortmo de busca exaustva para otmzar os tempos semafórcos. Na otmzação dos tempos para uma arteral, o usuáro realza dversos passos manuas, segundo uma determnada ordem, como por exemplo: prmero otmza o tempo de cclo, depos as defasagens e a seqüênca de fases. Dependendo da otmzação escolhda, o usuáro tem que defnr um mínmo, um máxmo e um ncremento ou passo, por exemplo, otmzar o tempo de cclo. A tabela 3.3 é uma síntese das característcas dos softwares ctados, anteror mente: 60
78 Tabela 3.3. Resumo dos softwares de coordenação semafórca. Software Abordagem Otmzação Fabrcante Custo($) MAXBAND PASSER II KOORD Macroscópca Macroscópca Macroscópca Programação lnear e ntera Busca Exaustva Mnmzação de Interferênca Hll-clmbng Busca Exaustva Mnmzação de Interferênca RT-TSD 3.0 Macroscópca Busca Exaustva PASSER V-03 TRANSYT-7F SYNCHRO 6 Mesoscópca Macroscópca Mesoscópca Busca Exaustva Mnmzação de Interferênca Algortmos Genétcos Busca Exaustva Hll-clmbng Algortmos Genétcos Busca Exaustva Hll-clmbng FHWA - Texas Transportaton Insttute FORTRAN Traffc Systems Lmted Texas Transportaton Insttute McTrans Center, Unversty of Florda Traffcware Consderações fnas Na revsão bblográfca, necessára para desenvolvmento deste capítulo, comprovou-se a dfculdade para obtenção de nformações mas detalhadas dos métodos matemátcos e das técncas de otmzação empregados nos softwares, devdo à falta de acesso às versões completas dos aplcatvos. A grande maora das versões analsadas foram versões demonstratvas dos aplcatvos, e nelas não era permtda a nclusão de dados ou mesmo a alteração dos exemplos exstentes. As característcas menconadas são orundas dos manuas e help (ajuda) dos aplcatvos e pesqusas realzadas por outros autores. A escolha da função heurístca a maxmzar ou mnmzar e do relaconamento e comportamento das varáves envolvdas é de fundamental mportânca, pos pode gerar uma tendênca a soluções ótmas que na realdade podem ser runs ou nefcazes operaconalmente, como ex: o que a TTI constatou no PASSER II. Vale salentar, que a maora dos aplcatvos dsponíves, orgnaram-se a partr de pesqusas em unversdades e o processo de aperfeçoamento contínuo prossegue graças o acúmulo permanente de novos conhecmentos e grupos de pesqusa. As condções de tráfego sofrem sgnfcatvas alterações entre dstntas localdades, logo os softwares fechados requerem ajustes e calbrações para reproduzr a stuação, e em alguns casos, exgem equpamentos e recursos não dsponíves. Um software desenvolvdo para as condções de tráfego da localdade faclta sua aplcação, ajustes e melhoras, além do desenvolvmento de tecnologa própra. 61
79 CAPÍTULO 4 - METODO KOORD 62
80 4.1. Método do KOORD (PORTO, 1982). A metodologa é baseada na mnmzação da nterferênca nas faxas de onda verde em ambas as dreções de tráfego, fluxo e contrafluxo. O processo começa consderando separadamente as dreções de tráfego. Assm são projetadas duas coordenações smples ndependentes, uma para o fluxo e outra para o contrafluxo (Fgura 4.1). Para melhor compreensão, fo adotada uma velocdade méda (v) para todo o trecho da coordenação, entretanto, na prátca, a velocdade pode varar entre nterseções semafórcas. Fgura 4.1. Dagrama espaço-tempo para coordenação smples. Superpondo-se os dagramas de ambas as coordenações e concdndo os tempos de vermelho na prmera nterseção (snal1) (Fgura 4.2), observa-se que, nas nterseções subseqüentes, ocorrem defasagens entre as respectvas localzações dos tempos de vermelho. Devdo estas defasagens a faxa de onda verde para a dreção do fluxo e os tempos de vermelho para a dreção contrara se nterceptam. Consequentemente, a faxa de onda verde é reduzda. Para mnmzar estas superposções, realzam-se deslocamentos dos tempos de vermelho, que representa a antecpação ou atraso do níco do tempo de verde. 63
81 Fgura 4.2. Superposção dos dagramas espaço-tempo das coordenações smples. Na Fgura 4.3, observa-se que ponto de encontro das lnhas à esquerda que lmtam a faxa de onda verde para ambas as dreções se nterceptam na altura da prmera nterseção. À medda que o dagrama espaço-tempo do fluxo é deslocado para a dreta (Fgura 4.3b e Fgura 4.3c), este ponto de encontro se afasta da nterseção um. O afastamento máxmo é atngdo após um deslocamento para a dreta gual ao valor de um cclo (Fgura 4.3d). Neste momento, os tempos de vermelho de ambas as coordenações concdem novamente na nterseção um. A dstânca entre a nterseção um e a posção do ponto de nterseção das lnhas lmítrofes esquerdas de ambas as ondas verdes é denomnado de excentrcdade (e). Para cada excentrcdade têm-se dferentes defasagens dos tempos de vermelho. Logo, a melhor excentrcdade, para determnação de uma coordenação de mão dupla, corresponde a menor nterferênca dos tempos de vermelho nas faxas de onda verde. A determnação da excentrcdade ótma pode ser estabelecda grafcamente ou por meo de um processo nteratvo através do cálculo de dversas coordenações varando-se sstematcamente a excentrcdade. 64
82 Fgura 4.3. Deslocamento do dagrama do fluxo - Excentrcdade. Após a seleção da excentrcdade, determna-se a melhor dsposção dos tempos de vermelho que maxmze a faxa de onda verde para ambas as dreções de fluxo. Para sso, adota-se como referênca a dsposção dos tempos de vermelho da coordenação smples do fluxo e determna-se, para cada nterseção, a posção deal dos tempos de vermelho através do deslocamento para esquerda ou dreta, tal que, compatblze ambas as coordenações. Este processo é o mesmo tanto para o Transporte Indvdual (TI) quanto para o Transporte Coletvo (TC). A únca dferença é que no TC, além da velocdade de deslocamento, precsa-se adconar o tempo de permanênca nos pontos de parada de ônbus. No TC, também, são duas coordenações smples uma para cada dreção de fluxo (Fgura 4.4). Superpõem-se ambas as coordenações e determna-se a dsposção deal dos tempos de vermelho, que atende ao prncípo da maxmzação da faxa de onda verde. 65
 e Transporte Coletvo (TC)), consste na verfcação da possbldade de adaptação da coordenação do TC no TI.")
83 Fgura 4.4. Dagrama dstânca-tempo para coordenação smples transporte coletvo. O próxmo passo, para a coordenação Bmodal (coordenação para o Transporte Indvdual (TI) e Transporte Coletvo (TC)), consste na verfcação da possbldade de adaptação da coordenação do TC no TI. O processo de coordenação Bmodal consste na obtenção das defasagens dos semáforos que contemple uma faxa de onda verde tanto para o transporte ndvdual quando para o transporte coletvo. O processo começa pela determnação da defasagem dos semáforos para o Tl, que retorna a máxma faxa de onda verde. Em seguda, calcula-se para cada excentrcdade do TC (EO) a faxa de onda verde e superpõe-se os dagramas espaço-tempo do TC com o TI e defn-se ncalmente uma defasagem (E), entre os exos da dstânca, de modo que as dsposções dos tempos de vermelho, de ambas as coordenações, sejam as mas concdentes possíves. As nterferêncas dos tempos de vermelho, para uma das modaldades, na onda verde da outra será reduzda, onde esta nterferênca não pode ser evtada, deve-se realzar deslocamentos do tempo de vermelho. Para sso toma-se como ponto de referênca a dsposção dos tempos de vermelho da coordenação para o TC e determna-se uma nova dsposção, tal que, reduza ao máxmo as nterferêncas na onda verde do TI. Em seguda, calculam-se as faxas de onda verde consderando as folgas dsponíves, tanto no exo do TI quanto no TC. Logo, têm-se, para cada excentrcdade do TC (EO), a melhor posção no exo das abscssas (E) que retorna a máxma faxa de onda verde para ambos os modos (Fgura 4.5). 66
84 Fgura 4.5. Processo gráfco da coordenação Bmodal. A metodologa retorna como resultado: a coordenação mas favorável, no fluxo e contrafluxo, para o Transporte Indvdual (TI), a coordenação para o Transporte Coletvo (TC) que resultou a melhor adequação dos dos modos, coordenação bmodal, com a faxa de onda verde no fluxo e contrafluxo e as defasagens dos aconamentos de cada nterseção Coordenação para Transporte Indvdual A coordenação para transporte ndvdual vsa obter a faxa de onda verde em ambas as dreções de tráfego, fluxo e contrafluxo. Os resultados são as defasagens de cada nterseção e a faxa de onda verde para o fluxo e contrafluxo. 67
85 Processo matemátco Transforma-se o tempo de verde e vermelho efetvos em undades de cclo, ou seja, a analse é feta no ntervalo de um cclo. O método procura o menor tempo de verde, entre todas as nterseções, pos a máxma faxa de onda verde do corredor corresponde ao menor tempo de verde efetvo, que é o valor ncal da faxa de onda verde (B e B ). Em seguda, calcula-se a folga ( u ), que corresponde a dferença entre o verde efetvo da nterseção e a faxa de onda verde ncal. Está folga representa o máxmo deslocamento possível para o tempo vermelho. u = tg B (4.1) Onde: u : Folga dsponível para deslocamento do verde efetvo da nterseção em cclos [s]; t g : Tempo de verde efetvo da nterseção [s]; B : Ampltude ou faxa de onda verde [s]. Determna-se o ponto de encontro das velocdades (TP) (Fgura 4.6): Fgura 4.6. Ponto de encontro das velocdades (TP). VR.VG.C TP = (4.2) VR + VG Onde: VR : Velocdade no fluxo [m/s]; VG : Velocdade no contrafluxo [m/s]; C : Tempo de cclo [s]. 68
86 O ponto de encontro das velocdades determna qual o lmte de deslocamento no exo y para percorrer um cclo no exo x. A segur adota-se um passo E, que é ncrementado em seu valor até atngr o lmte máxmo TP. Como a coordenação é realzada para dos modos, exste um TPI para o Transporte Indvdual (TI) e um TPO para Transporte Coletvo (TC). Em seguda calculam-se as defasagens de cada semáforo, no fluxo e no contrafluxo, como se a coordenação fosse estabelecda para cada dreção por vez. A Fgura 4.7a e Fgura 4.7b apresentam a dsposção gráfca das varáves adotadas nas equações (4.4) e (4.5). a coordenação no fluxo b coordenação no contrafluxo Fgura 4.7. Defasagem no fluxo e contrafluxo para o TI. No sentdo do fluxo: ep1 + s1 T = (4.3) V Onde: : Tempo para aconamento do semáforo em relação ao prmero, tal T que o semáforo esteja ncando o tempo de verde [s]; e p1 : Excentrcdade do prmero semáforo [m]; s 1 V : Dstanca entre exos do semáforo um ao semáforo [m]; : Velocdade entre os semáforos um e [m/s]; : Identfcador da nterseção semafórca {1,2,3,..,n}. Esta equação mostra quanto tempo depos do aconamento do prmero semáforo o veículo va atngr cada semáforo subseqüente. No entanto, necessta-se saber quanto tempo depos do aconamento do prmero os demas semáforos devem ser aconados em relação a um cclo, ou seja, a defasagem entre semáforos. 69
87 Fluxo: T Contrafluxo: Onde: T, C ep1 + s1 = (4.4) V.C T e1p + s1 T = (4.5) V.C :Tempo de aconamento em cclo [c]. :Tempo de cclo [s]. A defasagem de cada semáforo é representada pela parte fraconara de t T : = T nt(t ) para T 0 (4.6) Onde: t : defasagem da nterseção com relação ao nco do vermelho na nterseção 1 (t=0) No sentdo oposto, contrafluxo, a defasagem é gual à parte complementar de um cclo. t = C T nt(t ) para T 0 (4.7) < Para facltar a analse, garantndo que em todos os casos os deslocamento do tempo de vermelho do fluxo permaneçam no quadrante postvo, é necessáro que a defasagem do fluxo seja sempre maor do que a do contrafluxo. Logo, utlza-se a formulação abaxo para defnr o valor fnal de t, dentfcado como t (Fgura 4.9) : t se t t t = (4.8) t + 1 se t < t Onde: t : defasagem no fluxo. t : defasagem no contrafluxo. Obtdas as defasagens t e t, respectvamente, para o fluxo (nterseção 1 para n) e contrafluxo (nterseção n para 1), superpõem-se o dagrama espaço-tempo da coordenação para o fluxo sobre o dagrama do contrafluxo, de modo que os tempos de vermelho da nterseção 1 concdam. As análses dos possíves deslocamentos necessáros, tendo como referênca o vermelho efetvo do fluxo e a prordade adotada 70
88 (k). A prordade ndca qual o sentdo tem preferênca, fluxo ou contrafluxo, caso ocorra nterferênca na faxa de onda verde. Se k tende a zero, ndca que o fluxo tem preferênca sobre o contrafluxo. Se for gual a 0.5, dvd-se a nterferênca entre ambas as faxas de onda verde. Se k tende a um, ndca que o contrafluxo tem prordade sobre o fluxo. Fgura 4.8. Fgura 4.8. Varação da prordade k. O algortmo passa a mnmzar a nterferênca na faxa de onda verde do fluxo e contrafluxo para cada nterseção. Serão observados quatro casos possíves de deslocamento do vermelho para esquerda ou dreta. Estes casos ou deslocamentos são baseados e formulados de acordo com o nco e fm do vermelho efetvo e da faxa de onda verde do fluxo e contrafluxo. O fluxo é a referênca para formulação dos casos: Exstem dos casos onde não se utlza a prordade (k), sso ocorre quando: Caso 1a: Caso 1b: t = _ t t tr t + B Os outros casos ocorrem quando t tr < t + B, a parte esquerda ou dreta do vermelho no fluxo está superpondo na onda verde do contrafluxo, ou seja: Superposção da parte dreta do vermelho do fluxo: Caso 2 ou Caso 3a: t + B t. Superposção da parte esquerda do vermelho do fluxo: Caso 3b, 3c, 4a ou 4b: t + B < t. 71
89 Caso I Não há nterferênca do vermelho do fluxo na onda verde do contrafluxo. Caso Ia: os vermelhos se encontram com a mesma defasagem, não necessta de deslocamento, pos não há nterferênca (superposção) do tempo de vermelho do fluxo na onda verde do contrafluxo (Fgura 4.9). t = t Deslocamento gual à zero (d =0). Fgura 4.9. Os vermelhos se superpõem (Caso Ia). A folga de verde dsponível, para uma eventual necessdade de deslocamento do vermelho do fluxo na próxma otmzação, é: u = t B (4.9) Onde: g t g B : tempo de verde efetvo da nterseção [s]; : ampltude ou faxa de onda verde [s]. Caso Ib: Quando o níco do tempo de verde efetvo do fluxo for maor que o fnal da onda verde do contrafluxo, não necessta de deslocamentos, porque o tempo de vermelho do fluxo não nterfere na onda verde do contrafluxo, apesar de não haver superposção completa dos tempos de vermelho de ambas as dreções (Fgura 4.10). t tr t + B Deslocamento gual à zero (d =0). 72
90 Fgura O vermelho do fluxo não nterfere na onda verde do contrafluxo (Caso Ib). A folga de verde dsponível, para uma eventual necessdade de deslocamento do vermelho do fluxo na próxma otmzação, é: ( t - t ) ( t B) u =. (4.10) r + Onde: ( t - tr ) : Iníco do tempo de vermelho do fluxo [seg.]; ( t + B) : Lmte esquerdo (níco) da onda verde do contrafluxo [seg.]. Casos II, III e IV Interferênca do vermelho do fluxo na onda verde do contrafluxo. O tempo de vermelho do fluxo está nterferndo na onda verde do contrafluxo, logo a parte esquerda (níco) do vermelho do fluxo está superpondo na onda verde do contra fluxo (Fgura 4.11). t - t r < t +B Há necessdade de deslocamento (d 0). Fgura O vermelho do fluxo nterfere na faxa de onda verde do contrafluxo. 73
91 Exstem dos tpos de nterferênca do vermelho do fluxo na onda verde do contrafluxo: pela dreta (níco do tempo de vermelho do fluxo) ou pela esquerda (fm do tempo de vermelho do fluxo). Interferênca pela dreta t t. Nesta stuação são dentfcados dos casos: Caso II: A nterferênca do tempo de vermelho (p ) pode ser elmnada, pos a folga de tempo de verde (u ) é sufcente para o deslocamento necessáro do tempo de vermelho do fluxo, p u (Fgura 4.12). Fgura O vermelho do fluxo nterfere na faxa de onda verde do contrafluxo e é elmnado (Caso II). A nterferênca do tempo de vermelho na onda verde do contrafluxo é gual a: p _ = t t (Fgura 4.12a) (4.11) Se esta nterferênca for menor ou gual à folga dsponível do tempo de verde u ), ela é elmnada com o deslocamento ( d ), para esquerda, gual a: ( d p = (Fgura 4.12b) (4.12) A folga de verde dsponível ( u ), após este deslocamento, é gual a: 74
92 u = u d (4.13) Onde: u : Folga dsponível antes do deslocamento (equação 4.1); d : deslocamento para elmnar a nterferênca. Caso IIIa: A nterferênca do tempo de vermelho (p ) não pode ser elmnada, pos é maor do que a folga dsponível de tempo de verde (u ) para o deslocamento, p > u (Fgura 4.13). Fgura O vermelho do fluxo nterfere na faxa de onda verde do contrafluxo, o deslocamento é para esquerda e não pode ser elmnado (Caso IIIa). 75
93 A nterferênca do tempo de vermelho na onda verde do contrafluxo é gual a: p _ = t t (Fgura 4.13a) (4.14) A nterferênca é maor que à folga dsponível do tempo de verde ( u ), portanto não pode se elmnada totalmente. Após o deslocamento gual à folga ( d = u ), permanece um resíduo de nterferênca gual a ( p ): p = p u (Fgura 4.13b) (4.15) Este resíduo nterfere apenas na onda verde do contrafluxo. Para que as faxas de onda verde apresentem ampltudes (valores) guas, é necessáro deslocar metade do resíduo para esquerda. d = -[u + (1/ 2) p ] (4.16) No caso de prordades dstntas, devdo a volume de trafego dferente em ambas as dreções, o deslocamento para esquerda va depender da prordade (k) estabelecda. Com sso a formula geral do deslocamento é gual a: ( u k.p ) d = - + (Fgura 4.13c) (4.17) k : prordade estabelecda para uma das dreções, que pode sere: k = 0 : Prordade total para a onda verde do fluxo; 0 k < (½) : Intervalo de varação da prordade para a onda verde do fluxo; k = (½) : Prordade gual para ambas as dreções de fluxo; (½) < k 1 : Intervalo de varação da prordade para a onda verde do contrafluxo; k = 1 : Prordade total para a onda verde do contrafluxo; Depos do deslocamento ( d ), permanecem as seguntes nterferêncas do tempo de vermelho: Na onda verde do fluxo, a nterferênca ocorre pelo lado esquerdo, gual a: l = k.p (4.18) Na onda verde do contrafluxo, a nterferênca ocorre pelo lado dreto, gual a: ( ) r = 1 k (4.19).p Interferênca pela esquerda t + B < t. Nesta stuação são dentfcados quatro casos: IIIb, IIIc, IVa e IVb. Em todos eles a nterferênca não pode ser elmnada 76
94 completamente. As faxas de onda verde estão defasadas, ou seja, o ponto de encontro do níco do lmte esquerdo das faxas de onda verde não concde com o exo da nterseção, desta forma elas utlzam uma percentagem maor do tempo de verde. O ajuste para elmnar as nterferêncas fca lmtado. A Fgura 4.14 apresentada às duas stuações, quando o ponto de encontro concde e quando está após o exo da nterseção. Fgura O ponto de encontro do lmte esquerdo das faxas de onda verde. Para que possa exstr uma otmzação das faxas de onda vede, é necessáro que todos os deslocamentos do tempo de vermelho relaconados aos casos (Ia, Ib, II e IIIa) de nterferênca pela dreta, já tenham sdo realzados. Caso contráro, a otmzação fcará comprometda, pos as nterferêncas pela esquerda são as que reduzem a ampltude das faxas de onda vede. Antes de ncar, o processo de otmzação das nterferêncas pela esquerda, é necessáro dentfcar os novos lmtes para as faxas de onda verde. Os novos lmtes das faxas de onda verde estão ndcados com lnhas pontlhadas (Fgura 4.15 à Fgura 4.18). A nova ampltude da faxa de onda verde do fluxo (b) e contrafluxo ( b ) são obtdas conforme as expressões abaxo: b = B l _ b = B l max max r r max max (4.20) Onde: lmax = max(l ) : máxma nterferênca do tempo de vermelho pelo lado dreto na onda verde do fluxo (B); _ l max _ = max(l ) : máxma nterferênca do tempo de vermelho pelo lado dreto na onda verde do contrafluxo (B ); rmax = max(r ) : máxma nterferênca do tempo de vermelho pelo lado esquerdo na onda verde do fluxo (B); 77
95 r max = max(r ) : máxma nterferênca do tempo de vermelho pelo lado esquerdo na onda verde do contrafluxo (B ). Para dentfcar a melhor solução, que prejudquem menos as faxas de onda verde, são realzados dos deslocamentos um para a dreta e outro para esquerda. Prmera tentatva (deslocamento para dreta): realza-se um deslocamento para dreta no valor de r max até atngr o novo lmte da onda verde do fluxo (b). Este deslocamento não nterfere na onda verde fluxo (b), com sso a nterferênca ncal na onda verde do contrafluxo (b ) reduz. Depos desse deslocamento verfca-se se anda permanece uma eventual nterferênca (z ) (Fgura 4.15b e Fgura 4.18b), calculada abaxo: z _ = (t + B l max ) (t + r t ) (4.21) max r Onde: z : parte que nterfere na faxa onda verde com a correção dos novos lmtes; _ ( t + B l max ) : novo lmte da faxa de onda verde do contrafluxo; (t + rmax tr ) : o níco do vermelho após o deslocamento ( r max ). Segunda tentatva (deslocamento para esquerda): realza-se um deslocamento para esquerda no valor de u + l max, até atngr o novo lmte da onda verde do fluxo (b). Este deslocamento não nterfere na onda verde fluxo (b), com sso verfca-se se anda permanece uma nterferênca na onda verde do contrafluxo (b ) (Fgura 4.16c e Fgura 4.17c). Esta nterferênca ( p ) é calculada abaxo: [ t (u + lmax )] (t rmax ) p = + (4.22) Onde: p : nterferênca resultante na onda verde do contrafluxo após o deslocamento u + l max ; t (u + lmax ) : fm do vermelho após deslocamento u + l max ; t + r max : nco da onda verde do contrafluxo (b ). Depos desses deslocamentos, dentfca-se qual dos quatro casos seguntes ocorre: 78
96 Caso IIIb: Quando o deslocamento para esquerda (u + l max ) elmna a nterferênca na onda verde do contrafluxo (b ) (Fgura 4.15). p 0 Fgura Interferênca do vermelho pela esquerda da onda verde do contrafluxo (Caso IIIb). 79
97 Neste caso o deslocamento para esquerda (Fgura 4.15d) é determnado conforme abaxo: d [ t - (t r max )] + = (4.23) Após este deslocamento permanece um resíduo de nterferênca r na onda verde do contrafluxo (B ) gual a: r = r max (4.24) Se o módulo do deslocamento for maor que a folga ( d >u ), haverá uma nterferênca l na onda verde do fluxo (B) gual a: l = max(0 ; d u ) (4.25) Caso o deslocamento d, em valor absoluto, for menor do que a folga (u ) permanece uma folga de tempo de verde em relação a onda vede do fluxo (B) gual a: u = u d (4.26) Onde: u : folga de tempo de verde dsponível após o deslocamento; u : folga de tempo de verde ncal (Formula 5.08). Caso IIIc: Após as duas tentatvas de deslocamento, respectvamente, para dreta (r max ) e para esquerda (u + l max ), verfca-se que a menor nterferênca resultante ocorre com o deslocamento para o lado esquerda ( p ). Neste caso, observa-se que (Fgura 4.16): 0 < (4.27) Onde: " p z p : nterferênca resultante na onda verde do contrafluxo após o deslocamento u + l max (Fgura 4.16c); z : parte que nterfere na faxa onda verde com a correção dos novos lmtes, após o deslocamento para dreta no valor de r max (Fgura 4.16b); " 80
98 Fgura Interferênca do vermelho pela esquerda da onda verde do contrafluxo (Caso IIIc). 81
99 A nterferênca resultante p " nterfere apenas na onda verde do contrafluxo (b ). Para que as faxas de onda verde apresentem ampltudes (valores) guas, é necessáro deslocar metade desta nterferênca para esquerda, para sso o deslocamento necessáro sera (Fgura 4.16d): d " [(u + l ) + 1/ 2 (p )] = (4.28) max No caso de prordade dstntas devdo a volume de trafego dferente em ambas as dreções, o deslocamento para esquerda va depender da prordade (k) estabelecda. Com sso a formula geral do deslocamento é gual a: d " [(u + l ) + k (p )] = (4.29) max k : prordade estabelecda para uma das dreções, que pode ser: k = 0 : Prordade total para a onda verde do fluxo; 0 k < (½) : Intervalo de varação da prordade para a onda verde do fluxo; k = (½) : Prordade gual para ambas as dreções de fluxo; (½) < k 1 : Intervalo de varação da prordade para a onda verde do contrafluxo; k = 1 : Prordade total para a onda verde do contrafluxo; Depos do deslocamento ( d ), permanecem as seguntes nterferêncas do tempo de vermelho: Na onda verde do fluxo, a nterferênca ocorre pelo lado esquerdo, gual a: l = l + k.p (4.30) max " Na onda verde do contrafluxo, a nterferênca ocorre pelo lado dreto, gual a: r " ( 1 k) r max +.p = (4.31) Caso IVa: Após as duas tentatvas de deslocamento, respectvamente, para dreta (r max ) e para esquerda (u + l max ), verfca-se que a menor nterferênca resultante ocorre com o deslocamento para o lado dreto ( z ). Neste caso, observa-se que (Fgura 4.17a): " 0 < z < p (4.32) Onde: z : parte que nterfere na faxa onda verde com a correção dos novos lmtes, após o deslocamento para dreta no valor de r max (Fgura 4.17b); p : nterferênca resultante na onda verde do contrafluxo após o deslocamento u + l max (Fgura 4.17c); 82
100 Fgura Interferênca do vermelho pela dreta da onda verde do contrafluxo (Caso IVa). 83
101 A nterferênca resultante z nterfere apenas na onda verde do contrafluxo (b ). Para que as faxas de onda verde apresentem ampltudes (valores) guas, é necessáro deslocar metade desta nterferênca para dreta, para sso o deslocamento necessáro sera (Fgura 4.17d): d = r + 1/ 2 (z ) (4.33) max No caso de prordade dstntas devdo a volume de trafego dferente em ambas as dreções, o deslocamento para dreta va depender da prordade (k) estabelecda. Com sso a formula geral do deslocamento é gual a: d = r + k (z ) (4.34) max k : prordade estabelecda para uma das dreções, que pode ser: k = 0 : Prordade total para a onda verde do fluxo; 0 k < (½) : Intervalo de varação da prordade para a onda verde do fluxo; k = (½) : Prordade gual para ambas as dreções de fluxo; (½) < k 1 : Intervalo de varação da prordade para a onda verde do contrafluxo; k = 1 : Prordade total para a onda verde do contrafluxo; Depos do deslocamento ( d ), permanecem as seguntes nterferêncas do tempo de vermelho: Na onda verde do fluxo, a nterferênca ocorre pelo lado esquerdo, gual a: r = r + k.p (4.35) max " Na onda verde do contrafluxo, a nterferênca ocorre pelo lado dreto, gual a: _ l _ " = l max + ( 1 k).p (4.36) Caso IVb: Quando o deslocamento para dreta (r max ) elmna a nterferênca na onda verde do contrafluxo (b ) (Fgura 4.18). z 0 (4.37) Onde: z : parte que nterfere na faxa onda verde com a correção dos novos lmtes, após o deslocamento para dreta no valor de r max (Fgura 4.18a); 84
102 Fgura Interferênca do vermelho pela dreta da onda verde do contrafluxo (Caso IVb). Neste caso o deslocamento para dreta (Fgura 4.18b) é determnado conforme abaxo: d = r max (4.38) Quando este deslocamento não é sufcente para elmnar a nterferênca na onda verde _ do contrafluxo (B ), permanece uma nterferênca l que é determna como segue: _ l [ + B) (t + r t )] = Max 0;(t (4.39) Onde: max r ( t + B) : Lmte dreto da onda verde do contrafluxo. (t max r _ Caso l = 0 : + r t ) : níco do tempo de vermelho. ( t + r t ) ( t B) u = (4.40) max r + Onde: u : folga de tempo de verde dsponível após o deslocamento [c]; u : folga de tempo de verde ncal [c] (Equação 4.1). 85
103 Síntese da análse Com base nas analses realzadas para a coordenação semafórca em ambas as dreções de tráfego, constatou-se que as oto stuações de ajuste para maxmzar as ondas verdes, classfcam-se em quatro casos: Caso I: Quando não há necessdade de ajustes, a onda verde do fluxo e contrafluxo não são prejudcadas. As ampltudes das ondas verdes no fluxo e contrafluxo são as máxmas, respectvamente B e B, e guas ao menor tempo de verde das nterseções; Caso II: Quando exste uma superposção do tempo de vermelho na onda verde do contrafluxo, que é elmnada com o deslocamento do tempo de vermelho para esquerda, entretanto, são mantdos os valores máxmos de ampltude das ondas verde, respectvamente, B e B ; Caso III: Quando exste uma superposção do tempo de vermelho na onda verde do contrafluxo. Neste caso, o deslocamento do tempo de vermelho é para a esquerda e ambas as ondas verdes são prejudcadas (consderando prordades guas, ou seja, k=1/2). Portanto, as ampltudes resultantes são menores que as máxmas, b < B e b < B ; _ Caso IV: Quando exste uma superposção do tempo de vermelho na onda verde do contrafluxo. Neste caso, o deslocamento do tempo de vermelho é para a dreta e ambas as ondas verdes são prejudcadas (consderando prordades guas, ou seja, k=1/2). Portanto, as ampltudes resultantes são menores que as _ máxmas, b < B e b < B ; Defasagem dos aconamentos dos tempos de verde Após a análse dos deslocamentos do tempo de vermelho para mplementação das ondas verdes, em um corredor com mão dupla, determna-se, para cada nterseção, as defasagens dos aconamentos dos tempos de verde para o fluxo e o contrafluxo: Y = t + d (4.41) 1 + (t + d ) para Y < 0 t e = ( t + d ) para 0 Y < 1 (4.42) (t + d ) 1 para Y 1 86
104 Onde: t e : defasagem do aconamento do tempo de verde na nterseção após a coordenação para ambas as dreções de tráfego [c]; d : deslocamento do tempo de vermelho na nterseção [c]; : dentfcador da nterseção (=1,2,3,...,n); n : número de nterseções da coordenação; t : tempo de aconamento do verde na nterseção após a coordenação para dreção do fluxo [c] Ajuste da defasagem para o fluxo e contrafluxo Para facltar os cálculos, no processo de determnação da coordenação, admtu-se que as lnhas de retenção, de ambas as dreções, localzavam-se no centro da nterseção. Portanto, para estabelecer o momento exato de aconamento dos semáforos, para cada dreção, é necessára a correção da localzação das lnhas de retenção em função de suas dstâncas ao centro da nterseção (Fgura 4.19). Fgura Ajuste da localzação da lnha de retenção. As antecpações do tempo de aconamento na nterseção para o fluxo e contrafluxo são: x ta Fluxo : t x = + (4.43) V C C Contrafluxo : Onde: _ x t x t a = + (4.44) V C C 87
105 t x x, _, t x : antecpação do tempo de aconamento em função da lnha de retenção da nterseção, respectvamente, na dreção do fluxo e contrafluxo, [c]; _ x : dstânca da lnha de retenção ao centro da nterseção, respectvamente, na dreção do fluxo e contrafluxo [m]; _ t a, t a : tempo de arrancada do prmero veículo da nterseção, respectvamente, na dreção do fluxo e contrafluxo [s]; V, V : velocdade, respectvamente, na dreção do fluxo e contrafluxo [m/s]; C : cclo semafórco [s]. Para determnar os ajustes da defasagem (t e ) devdo à antecpação dos tempos de aconamento ( t x Y = t Y = t e e t t x x e _ t x ), adotam-se as seguntes varáves: (4.45) Deste modo, as respectvas defasagens com os ajustes são obtdas com segue: Fluxo : 1 + (te t x ) para Y < 0 Te = (4.46) para 0 Y < 1 ( te t x ) Contrafluxo : 1+ (te t x ) para Y < 0 Te = (4.47) ( te t x ) para 0 Y < 1 Onde: T e, T e : Defasagens dos aconamentos dos semáforos do fluxo e contrafluxo na nterseção com relação a nterseção 1 [c]; A tabela 4.1 resume os quatro casos com as possíves nterferêncas, deslocamentos e folgas resultantes. 88
106 Tabela 4.1. Analse dos deslocamentos do tempo de vermelho. t = t t t B t t < t B t r + Não necessta de deslocamentos, ou seja, não utlza-se a prordade k atrbuída. t + B p p g r + t + B < t t " = t t p = [ t (u + lmax )] u = t B = p u p u u p > p " " 0 0 < p z p " = (t + B l max (t + r ) - (t + r max max ) t r ) " < z 0 0 z < p Casos I a I b II III a III b III c IV a IV b Desl. Nenhum Nenhum Esquerda Esquerda Esquerda Esquerda Dreta Dreta - - " d l r r l u p - (u - k.p ) - [t - (t rmax )] + [(u ] " + lmax ) + k.p max k.z k.p Max[ 0; ] (1 max - k).p r d u r l + " max k.p t g B ( t t ) ( t B) Onde: t - defasagem no sentdo do fluxo. B - faxa de onda verde. k - Prordade adotada. u d r + - u = u d t - defasagem no sentdo do contrafluxo. + ( 1 " max k).p l r + r max r max + k.z r max + ( 1 Max[ 0;(t + B) (t + r t )] max k).z max = t + rmax tr t u ( ) ( B) tr - vermelho efetvo do fluxo. p - tempo a ser deslocado. u - folga para deslocamento do verde efetvo. d - deslocamento do verde efetvo da nterseção. lmax = max(l) - máx. nterf. do vermelho pelo lado esquerdo na OV do fluxo (B). lmax = max(l) rmax = max(r ) - máx. nterf. do vermelho pelo lado dreto na OV do fluxo (B). r max(r) Fonte: Porto, t g - vermelho efetvo do contrafluxo. p - parte entrante na faxa de onda verde. - máx. nterf. do vermelho pelo lado esquerdo na OV do contrafluxo (B). max = - máx. nterf. do vermelho pelo lado dreto na OV do contrafluxo (B). r 89
107 4.3. Coordenação para Transporte Coletvo A coordenação para o Transporte Coletvo (TC) dfere do Transporte Indvdual (TI) pela adção do tempo permanênca nos pontos de parada. Está coordenação está nserda no processo da coordenação bmodal, ou seja, a melhor faxa de onda verde obtda o transporte coletvo é para atender a coordenação de ambos os modos, Transporte Indvdual com Transporte Coletvo, no fluxo e contrafluxo. No tem 4.4 será apresentado com maores detalhes o processo de coordenação para ambos os modos. Os resultados são as defasagens de cada nterseção, para o bmodal, e a faxa de onda verde para o fluxo e contrafluxo para o transporte coletvo Processo matemátco A dferença para o processo de coordenação do TI é a adção do tempo de parada na determnação das defasagens ncas de cada nterseção subseqüente ao ponto de parada. Como apresentado no capítulo 2, este tempo é resultante da soma do tempo de desembarque, o tempo de entrada e saída do ponto de parada. A Fgura 4.20 mostra o comportamento da onda verde para o TC. a coordenação no fluxo b coordenação no contrafluxo Fgura Aconamentos no fluxo e contrafluxo para o TC. No fluxo: No contra fluxo: EO + SRO HR TR = frac +, para todo j n. VRO.C C EO + SGO HG TGI = 1 frac +, para todo j n. VGO.C C 90
108 Onde: TR, TG : Defasagem dos aconamentos no sentdo do fluxo e contrafluxo [c]; EO : Excentrcdade Valor do passo na teração, o valor máxmo é TP; SRO : Dstânca da nterseção até a orgem do exo no sentdo do fluxo [m]; SGO : Dstânca da nterseção até a orgem do exo no sentdo do contrafluxo [m]; VRO, VGO : Velocdade na dreção do fluxo e contrafluxo [m/s]; C : Tempo de cclo; HR, HG : Tempo gasto no ponto de parada no sentdo do fluxo e contrafluxo [s]; 4.4. Coordenação para o Transporte Indvdual e Coletvo - Bmodal. O processo de coordenação bmodal começa pela obtenção da faxa de onda verde para o TI. Em seguda, para cada excentrcdade no exo das dstâncas, obtêm-se uma faxa de onda verde e, consequentemente, o dagrama espaço-tempo para o TC. Superpõe-se os dagramas espaço-tempo do TC com o TI, concdndo-se os exos, e desloca-se o dagrama do TC ao longo do exo do tempo, varando no ntervalo de um cclo. Tomando como referênca o dagrama do TI, observa-se que a nterferênca de seus tempos de vermelho nas faxas de onda verde do TC vara em função do deslocamento. Ao encontrar a posção, que prejudque menos as faxas de onda verde, de ambos os modos, realzam-se deslocamentos dos tempos de vermelho, para cada nterseção, com objetvo de maxmzar as faxas de onda verde. Para possbltar a coordenação bmodal, adota-se o sstema de coordenadas do dagrama espaço-tempo do TI como referênca e faz-se a transposção das defasagens dos aconamentos dos tempos de verde do TC para este sstema de coordenadas. Com sso, a defasagem dos aconamentos dos tempos verde é determnada pela formulação abaxo: Y = t E (4.48) e (TC) + ( t + E) para 0 Y < 1 e (TC) t e (TC) = (4.49) (t e (TC) + E) 1 para Y 1 Onde: t e (TC) : defasagem do aconamento do tempo verde do TC, ajustado para o E sstema de coordenadas do TI [c]; : dstânca, em undades de tempo, entre a orgem das coordenadas de referênca do TI ao dagrama do TC [c] (Fgura 4.5). 91
109 Para facltar a analse da coordenação bmodal, de modo que ela sempre ocorra no prmero quadrante do sstema de coordenadas, substtu-se o valor de t e (TC) por t " e (TC), conforme abaxo: t e (TC) para t e (TC) t " e (TI) t e (TC) = (4.50) t e (TC) + 1 para t e (TC) < t e (TI) Onde: t " e (TC) : defasagem do aconamento do tempo de verde para TC na analse da coordenação Bmodal [c] Processo matemátco O método para determnação da coordenação Bmodal segue os seguntes passos: Passo 1: Determnação dos lmtes das faxas de onda verde; Passo 2: Verfcação se exste superposção do tempo vermelho da coordenação do Transporte Coletvo (TC) com as faxas de onda verde do Transporte Indvdual (TI); Passo 3: Determnação do deslocamento necessáro para elmnar a superposção; Passo 4: Determnação do deslocamento máxmo admssível para garantr uma faxa de onda verde mínma para o TC; Passo 5: Determnação do deslocamento mas favorável consderando as faxas de onda verde mínma; Passo 6: Determnação da onda verde resultante para o TC; Passo 7: Determnação da onda verde resultante para o TI; Passo 8: Determnação da defasagem dos aconamentos do tempo verde para a coordenação Bmodal. Passo 1: Determnação dos lmtes das faxas de onda verde Para cada nterseção () determna-se, no dagrama espaço-tempo, os lmtes esquerdo (L e fluxo e do contrafluxo: L ) e dreto (R e R ) das faxas de onda verde, respectvamente, do 92
110 L, R : Ponto de níco e do fm da faxa de onda verde do fluxo na nterseção (); L, R : Ponto de níco e do fm da faxa de onda verde do contrafluxo na nterseção (); Nos dagramas espaço-tempo, da Fgura 4.21, são apresentadas as localzações dos pontos lmte das faxas de onda verde do fluxo e contrafluxo para cada um dos quatro casos resultantes da análse dos deslocamentos do tempo de vermelho (Tabela 4.1 e Item ). Conforme a Fgura 4.21, calcula-se o ponto lmte das faxas de onda verde do fluxo e contrafluxo, para a coordenação do TI e do TC, de acordo com a formulação abaxo: Pontos lmtes da faxa de onda verde do fluxo (b): Em todos os quatro casos utlzam-se as seguntes formulas: L = t d + r R = L b (4.51) e max + Pontos lmtes da faxa de onda verde do contrafluxo ( b ): Para os casos I e IV as formulas são: R = ( t e + 1) t r + u + l max l L = R + b (4.52) Para os casos II e III as formulas são: L = t e + r max r R = L + b (4.53) Onde: L, R : Ponto de níco e do fm da faxa de onda verde do fluxo na nterseção (); L, R : Ponto de níco e do fm da faxa de onda verde do contrafluxo na nterseção (); 93
111 Fgura Localzação dos pontos lmtes das faxas de onda verde (b e b ). Com os pontos lmtes defndos, determna-se o ponto extremo esquerdo e dreto desses lmtes, consderando ambas as faxas de onda verde. Ponto extremo esquerdo: L = Mn L, L (4.54) Ponto extremo dreto: R = Max R, R (4.55) Passo2: Verfcação se exste superposção do tempo vermelho da coordenação do Transporte Coletvo (TC) com as faxas de onda verde do Transporte Indvdual (TI). Verfca-se se exste superposção do tempo de vermelho do TC com as faxas de onda verde do TI. Esta superposção ocorre quando a segunte desgualdade é verdadera (Fgura 4.22): L < " ( TI) < t e (TC) R (4.56) (TI) 94
112 Onde: L, R ( TI) ( TI) : Extremo esquerdo e dreto das faxas de onda verde do TI na nterseção (). Fgura Superposção da onda verde do TC com o TI. Passo 3: Determnação do deslocamento necessáro para elmnar a superposção. A superposção do tempo de vermelho nas faxas de onda vede do Transporte Indvdual (TI), pode ser elmnada deslocando para esquerda ou para dreta. a) Elmnar a superposção com deslocamento para esquerda: a superposção será elmnada quando o fm do tempo de vermelho ( t " e (TC) com o ponto extremo esquerdo ( L (TI) ) da faxa de onda verde do TI (Fgura 4.23). d nec Onde: " ( t L ) e (TC) (TI) ) concdr = (4.57) d nec : deslocamento necessáro para elmnar a superposção na faxa de onda verde do TI [c]. 95
113 Fgura Elmnar superposção com deslocamento para esquerda. b) Elmnar a superposção com deslocamento para dreta: a superposção será elmnada quando o fm do tempo de vermelho ( t " e (TC) extremo dreto ( R ) da faxa de onda verde do TI (Fgura 4.24). (TI) ) concdr com o ponto d nec " ( R + t ) t = (4.58) (TI) r e (TC) Fgura Elmnar superposção com deslocamento para dreta. Passo 4: Determnação do deslocamento máxmo admssível para garantr uma faxa de onda verde mínma para o Transporte Coletvo (TC). Qualquer deslocamento do tempo de vermelho pode prejudcar as faxas de onda verde do TC. Portanto, é necessáro estabelecer o máxmo deslocamento admssível, de modo a garantr uma faxa de onda verde mínma (b mn ) para o TC. Para defnr o valor mínmo da faxa de onda verde, sera mportante realzar medções, n loco, para o valor mas adequado às condções de tráfego do corredor. 96
114 Então o deslocamento máxmo admssível é calculado como segue: a) Deslocamento para esquerda: exstem duas stuações, uma quando o lmte da faxa de onda verde do contrafluxo está à dreta da faxa de onda verde do fluxo L ( TC ) L ( TC ) (Fgura 4.25a) ou caso contráro L (TC) < L (TC) (Fgura 4.25b). Nesta stuação, o deslocamento é determnado como segue: " ( t + 1 t ) e (TC) r R (TC) + b (TC) bmn para L (TC) L (TC) d = max (4.59) " [( t e (TC) + 1 tr ) R (TC) + ( b (TC) bmn )] para L (TC) < L (TC) b) Deslocamento para dreta: exstem duas stuações, uma quando o lmte da faxa de onda verde do contrafluxo está à dreta da faxa de onda verde do fluxo R (TC) R (TC) (Fgura 4.25a) ou caso contráro (TC) R (TC) stuação, o deslocamento é determnado como segue: " ( L t ) + ( b b ) R < (Fgura 4.25b). Nesta (TC) e (TC) (TC) mn para R (TC) R (TC) d max = (4.60) " L (TC) t e (TC) + b (TC) bmn para R (TC) < R (TC) Onde: d max : deslocamento máxmo admssível na nterseção [c]; L, L (TC) :Ponto de níco da faxa de onda verde do TC para o fluxo (TC) (TC) e contrafluxo, respectvamente, na nterseção () [c]; R, R (TC) : Ponto do fm da faxa de onda verde do TC para o fluxo e contrafluxo, respectvamente, na nterseção () [c]; b (TC), b (TC) : Faxa de onda verde do TC resultante após a coordenação do TC para o fluxo e contrafluxo, respectvamente [c]. 97
115 Fgura Deslocamento máxmo admssível para esquerda ou dreta. Passo 5: Determnação do deslocamento mas favorável consderando as faxas de onda verde mínma. O deslocamento mas favorável é aquele que elmna ou reduz ao máxmo a superposção dos tempos de vermelho nas faxas de onda verde. Desta forma, o deslocamento mas favorável a ser adotado será: Onde: d nec para d nec d max D = (4.61) d max para d nec > d max D : deslocamento mas favorável a ser adotado para a nterseção (); Para defnr se o deslocamento será para esquerda ou dreta, adota-se o segunte procedmento: 1. A dreção do deslocamento será aquela que elmna a superposção e o deslocamento será gual ao necessáro ( d ); nec 98
116 2. Se for possível elmnar a superposção em ambas as dreções, esquerda e dreta, escolhe-se aquela cujo deslocamento do tempo de vermelho for menor, logo o deslocamento será gual ao necessáro ( d ); nec 3. Quando nenhuma das dreções elmna a superposção, escolhe-se aquele que dexa o menor resíduo após o deslocamento máxmo admssível ( d max ); Passo 6: Determnação da onda verde resultante para o Transporte Coletvo (TC). Após o deslocamento ( D ), verfca-se se permanece algum resíduo de superposção e determnam-se as novas ampltudes das faxas de onda verde do TC no fluxo e contrafluxo. a) Deslocamento ( D ) realzado para a esquerda. Determnação do resíduo de superposção após o deslocamento (Fgura 4.26): " Fluxo : l max{ R [( t + 1) ( D t )]; 0} = (4.62) (TC) (TC) e (TC) + " Contrafluxo : l (TC) max{ R (TC) [( t + 1) ( D + t )]; 0} Onde: l, (TC) l (TC) = (4.63) e (TC),: Resíduo da superposção do tempo de vermelho pelo lado dreto das faxas de onda verde do TC no fluxo e contrafluxo, respectvamente; r r Fgura Resíduos da superposção pela dreta nas faxas de onda verde do TC, no fluxo e contrafluxo. 99
117 Determnação dos novos valores máxmos da superposção pelo lado dreto da faxa de onda verde: Fluxo : l = l + l (4.64) _ max (TC) _ max (TC) (TC) _ Contrafluxo : l max = l max + l (TC) (4.65) Onde: (TC) l max (TC), max (TC) (TC) _ l : máxma superposção do tempo de vermelho pelo lado dreto da faxa de onda verde do TC no fluxo (B) e contrafluxo (B ) [c]; As faxas de onda verde resultantes, após o deslocamento (D ) para esquerda, para o Transporte Coletvo (TC) no fluxo ( b (TC) ) e contrafluxo ( b (TC) ), são: Fluxo : Contrafluxo : b b (TC) = b l (4.66) (TC) (TC) _ (TC) = b (TC) l (TC) (4.67) b) Deslocamento ( D ) realzado para a dreta. Determnação do resíduo de superposção após o deslocamento (Fgura 4.27): " Fluxo : r max{ ( t + D ) l ; 0} (TC) = (4.68) e (TC) " Contrafluxo : r (TC) max ( t + D ) Onde: r, r (TC) (TC) (TC) _ = e (TC) l (TC) ; 0 (4.69) : Resíduo da superposção do tempo de vermelho pelo lado esquerdo das faxas de onda verde do TC no fluxo e contrafluxo, respectvamente; 100
118 Fgura Resíduos da superposção pela esquerda nas faxas de onda verde do TC, no fluxo e contrafluxo. Determnação dos novos valores máxmos da superposção pelo lado esquerdo da faxa de onda verde: Fluxo : r = r + r (4.70) max (TC) max (TC) (TC) Contrafluxo : r max = r max + r (TC) (4.71) Onde: (TC) r max (TC), max (TC) (TC) r : máxma superposção do tempo de vermelho pelo lado esquerdo da faxa de onda verde do TC no fluxo (B) e contrafluxo (B ) [c]; As faxas de onda verde resultantes, após o deslocamento (D ) para dreta, para o Transporte Coletvo (TC) no fluxo ( b (TC) ) e contrafluxo ( b (TC) ), são: Fluxo : Contrafluxo : b b (TC) = b r (4.72) (TC) (TC) (TC) = b (TC) r (TC) (4.73) Onde: b, b (TC) : Faxa de onda verde resultante no fluxo e contrafluxo, (TC) respectvamente, na coordenação bmodal para o TC após o deslocamento (D ) [c]; b (TI), b (TI) : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, na coordenação do TI [c]. 101
119 Passo 7: Determnação da onda verde resultante para o Transporte Indvdual (TI). Após o deslocamento ( D ), verfca-se se permanece algum resíduo de superposção e determnam-se as novas ampltudes das faxas de onda verde do TI no fluxo e contrafluxo. a) Deslocamento ( D ) realzado para a esquerda. Determnação do resíduo de superposção após o deslocamento (Fgura 4.28): r " = t L D (4.74) Fluxo : (TI) ( e (TC) (T) ) Contrafluxo _ " : r (TI) = t e (TC) L (TI) D (4.75) Onde: r, r (TI) (TI) : Resíduo da superposção do tempo de vermelho pelo lado dreto das faxas de onda verde do TI no fluxo e contrafluxo, respectvamente; Fgura Resíduos da superposção pela dreta nas faxas de onda verde do TI, no fluxo e contrafluxo.. b) Deslocamento ( D ) realzado para a dreta. Determnação do resíduo de superposção após o deslocamento (Fgura 4.29): " Fluxo : l R ( t + D t ) (TI) = (4.76) (TI) e (TC) r 102
120 _ " Contrafluxo : l (TI) R (TI) ( t + D t ) Onde: l, (TI) _ l (TI) = (4.77) e (TC) r : Resíduo da superposção do tempo de vermelho pelo lado esquerdo das faxas de onda verde do TI no fluxo e contrafluxo, respectvamente; Fgura Resíduos da superposção pela dreta nas faxas de onda verde do TI, no fluxo e contrafluxo.. As faxas de onda verde resultantes, após todos os deslocamentos (D ), para o Transporte Indvdual (TI) no fluxo ( b (TI) ) e contrafluxo ( b (TI) ), são: Fluxo : b b max( l ) max( r ) (TI) = (4.78) (TI) (TI) _ Contrafluxo : b (TI) = b (TI) max (TI) (TI) l max r (4.79) Onde: b (TI), (TI) (TI) b : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, na coordenação bmodal para o TI, após todos os deslocamentos (D) [c]; (TI) b (TI), b : Faxa de onda verde resultante no fluxo e contrafluxo, respectvamente, na coordenação do TI [c]. 103
121 Passo 8: Determnação da defasagem dos aconamentos do tempo verde para a coordenação Bmodal. Após a análse dos deslocamentos do tempo de vermelho para mplementação da coordenação Bmodal, em um corredor com mão dupla, determnam-se, para cada nterseção, as defasagens dos aconamentos dos tempos de verde para o fluxo e o contrafluxo: Y = t e + D (4.80) " (TC) " 1 + (t e (TC) + D ) para Y < 0 " t e = ( t e (TC) + D ) para 0 Y < 1 (4.81) " (t e (TC) + D ) 1 para Y 1 Onde: t e t " e (TC) : defasagem do aconamento do tempo de verde na nterseção da coordenação Bmodal [c]; : defasagem do aconamento do tempo de verde para transporte coletvo na analse da coordenação Bmodal [c]. D : deslocamento do tempo de vermelho na nterseção para a coordenação Bmodal [c]; : dentfcador da nterseção (=1,2,3,...,n); 4.5. Consderações fnas A metodologa de coordenação desenvolvda por Porto, em 1982, permte a coordenação para dos modos de transportes, o ndvdual e o coletvo. A metodologa permte um tratamento prortáro para um dos modos ou para uma das dreções de fluxo. A metodologa necessta de agulns ajustes, pos os atuas métodos de coordenação ncam o processo de obtenção da faxa de onda verde com as caracsterstcas fsscas e operaconas de cada nterseção do corredor. 104
122 CAPÍTULO 5 - MEDOTOLOGIA 105
123 5.1. Introdução. A coordenação semafórca sempre prorzou o Transporte Indvdual (TI) (automóves partculares). A ntegração do Transporte Coletvo (TC), na coordenação semafórca, vsa obter uma redução no tempo de vagem e um aumento do conforto através da redução de paradas nconvenentes durante os tempos vermelhos dos semáforos. Isso contrbu para reduzr o consumo de combustível, melhorar a pontualdade e freqüênca do Transporte Coletvo (TC), além de promover um aumento de atratvdade e capacdade de concorrer com o Transporte Indvdual (TI). A metodologa para coordenação de semáforos, adotada como referênca para o desenvolvmento da presente pesqusa, fo desenvolvda por Porto em Entre as melhoras adconadas destacam-se as seguntes: Programação semafórca de cada nterseção solada, antes do processo de coordenação; Adoção de um cclo ótmo para todas as nterseções com base na nformação de volumes; Cálculo do tempo de verde de pedestres; Velocdades dstntas por trecho; Coordenações semafórcas dstntas para o TI em mão únca e em mão dupla, TC em mão únca e em mão dupla, TI com TC no sentdo contráro e para ambos os modos - Bmodal; Meddas de desempenho como efcênca e acessbldade, adotadas por outros programas; Representação gráfca dos respectvos dagramas espaço-tempo; Entrada e saída gráfca dos resultados; Índces de desempenho: mnmzar o atraso, maxmzar a faxa de onda verde. 106
124 5.2. Análse de nterseção solada A metodologa desenvolvda por Porto, em 1997, começa com a dstrbução das setas dreconas de tráfego e das fases. Em seguda, dentfcam-se os grupos focas e aplca-se o método de programação semafórca, que calcula a duração do tempo de verde, entreverdes e do cclo semafórco. O resultado é apresentado através de um conjunto de dagramas de barra denomnado dagrama de tempo correspondente aos grupos focas exstentes. Os movmentos executados pelos veículos em uma nterseção vára não podem ser realzados smultaneamente, por uma questão de conflto espacal, ou seja, as correntes de tráfego com dferentes orgens e destnos se nterceptam em dversos pontos da área de conflto da nterseção. Estes pontos são determnados traçando-se o percurso dos fluxos. As correntes de tráfego que se cruzam são chamadas de correntes confltantes. Em nterseções com elevado volume de tráfego, ou com mutas correntes confltantes, é necessáro nstalar semáforos para controlar o conflto espacal dos fluxos e proporconar mas segurança e reduzr o tempo de espera para realzar a travessa, aumentando o conforto e a capacdade de fluxo (PORTO, 1997). Em uma programação semafórca é necessáro dstrbur dferentes ntervalos de tempo, denomnados de fases, para permtr o escoamento alternado das correntes de fluxos confltantes. Logo, as correntes de tráfego, lberadas na mesma fase, não são confltantes. A metodologa segue os concetos de fase, estágo e grupo focal apresentados: Fase é a porção do cclo alocada para um determnado conjunto de movmentos não confltantes. Estágo é um período da programação semafórca de uma nterseção durante o qual a ndcação lumnosa de todos os grupos focas não se altera. Grupo focal é um conjunto de semáforos repetdores, ou seja, aqueles que apresentam os mesmos focos de luz, alternando smultaneamente suas cores. O processo consste na defnção das setas dreconas de tráfego e das fases, dentfcação dos grupos focas controladores dos fluxos de veículos e pedestres. Em seguda, a metodologa de programação semafórca calcula a duração dos tempos de entreverdes, verdes e do cclo semafórco. O resultado fnal da metodologa é chamado de plano semafórco, sendo apresentado através de um conjunto de dagramas de barra denomnado dagrama de tempos correspondendo aos grupos focas defndos. 107
125 Setas dreconas de tráfego Os fluxos de veículos chegam, à nterseção, dstrbuídos entre as dversas faxas de tráfego de cada psta de acesso. Dependendo das característcas geométrcas da nterseção, do volume e das regras de controle de tráfego, podem ser permtdos três tpos de movmentos, por psta de acessos, quas sejam: movmentos de conversão à esquerda, à dreta e de travessa. Para ordenar com antecedênca estes fluxos, deve-se empregar a snalzação horzontal pntando setas nas faxas de tráfego ndcando as correspondentes dreções dos movmentos permtdos. Estas setas dreconas de tráfego podem ser smples, quando permte somente uma dreção de deslocamento, ou mstas quando permtem dos ou mas movmentos por faxa de tráfego. No plano de dstrbução de fases para a defnção de uma programação semafórca, os movmentos compartlhados, ndcados pelas setas dreconas, devem ser, necessaramente, mantdos numa mesma fase. Logo ambos os movmentos são controlados pelo mesmo grupo focal. Assm, a dstrbução de setas dreconas de tráfego condcona um correspondente conceto de dstrbução de fases, portanto, devem ser elaboradas smultaneamente. Então para determnar o tpo de seta dreconal de tráfego, em cada faxa, defnem-se quas os movmentos que serão lberados no mesmo tempo de verde. Em seguda, adota-se o procedmento: a) Coleta-se, em campo, o número de faxas de tráfego dsponíves e os fluxos horáros de veículos, por movmento permtdo, a partr de cada psta de acesso à nterseção vára: fluxo horáro de conversão à esquerda, de travessa e conversão à dreta; b) Defnem-se os movmentos que serão lberados durante o mesmo tempo de verde. A composção do tráfego de veículos é bastante dversfcada (carros de passeo, moto, ônbus, bonde, camnhão, etc.), logo é necessára a homogenezação dos fluxos de veículos através da adoção de uma undade únca de medda. O carro de passeo, por ser o mas utlzado nas vas, fo escolhdo com undade padrão para a equvalênca dos demas veículos. Exstem város estudos de fatores de equvalênca vecular, o que gera também uma dversdade de fatores de equvalênca (Tabela 5.8). Logo, valores de fluxo de saturação em ucp/h, nem sempre podem ser comparados entre s, pos métodos dferentes de correção dos valores em undades de veículos podem ter sdo aplcados. Além dsso, para efeto de estudos comparatvos de desempenho operaconal de nterseções, fca claro que é precso o uso de fatores de equvalênca específcos para cada local, uma vez que só assm se pode garantr a contemplação correta e completa dos efetos externos na descarga vecular em semáforos (LUNA, 2003). A tabela 5.1 apresenta os valores dos fatores de equvalenca vecular por tpo de veículo, orundos de pesqusas brasleras e estrangeras. 108
126 Tabela 5.1. Fatores de equvalênca vecular. PESQUISAS Carro de Passeo Fator de equvalênca (UCP*) Camnhão Camnhão Moto Leve Pesado Ônbus Estrangeros HCM (1985) TEPLY e JONES (1991) 1 0,5 1,5 2,5 1,75 ACELICK (1993) TARKO e TRACZ (2000) 1-1,6 1,7 1,6 Naconas DENATRAN (1984) 1 0,33 1 1,75 2,25 ANDRADE (1994) 1 0,46 1,36 2,01 1,72 SETTI e BARBUTO (1994) 1 0,4 1,4 2,2 1,8 Valores Sugerdos (méda naconal) 1 0,4 1,25 1,98 1,92 *UCP-Undades de carro de passeo. FONTE: PORTO, 1997; LUNA, 2003; TARKO e TRACZ, Fluxo horáro médo O Fluxo Horáro Médo (FH), por faxa, é determnado dvdndo-se o fluxo horáro (FH) pelo número de faxas (N), consderando-se a hpótese que os veículos se dstrbuem unformemente entre as faxas, ou seja: FH FH = (5.1) N Onde: FH : fluxo horáro médo de veículos por faxa [cp/h]; FH : fluxo horáro de veículos por psta de acesso [cp/h]; N : número de faxas dsponíves. Exstem dos tpos de controle: a) O controle por acesso quando todos os fluxos de uma psta de acesso são lberados smultaneamente; logo, os movmentos dos fluxos com dreções dstntas podem compartlhar a mesma faxa de tráfego, o que resulta na utlzação de setas dreconas mstas. O fluxo horáro médo por faxa (FH) é obtdo dvdndo-se o somatóro dos volumes de trafego de todas as dreções de fluxo compartlhadas pelo número de faxas dsponíves: 109
127 ( FH + FH FH ) t d FH = N (5.2) Onde: e e + FH,FH, FH : fluxo de conversão à esquerda, de travessa e t d N conversão à dreta, respectvamente [cp/h]; : número de faxas dsponíves na psta de acesso. b) O controle por dreção quando são lberados, smultaneamente, movmentos semelhantes de pstas de acesso dstntas, ou seja, fluxos com a mesma dreção e sentdos opostos. Neste caso, reserva-se pelo menos uma faxa para o fluxo de conversão à esquerda, enquanto as faxas restantes são utlzadas pelos fluxos de conversão à dreta (FH d ) e de travessa (FH t ). Assm, o tempo de verde para o fluxo de conversão à esquerda pode ser confnado em uma fase dstnta ou pode ter duração dferente do tempo de verde para travessa e conversão à dreta. Logo, é necessáro defnr quantas faxas serão reservadas para a dreção que se deseja segregar das demas. Por exemplo, se for reservado para o fluxo de conversão à esquerda o número de n faxas, esta psta de acesso terá dos grupos de faxas, cuja as ocupações são: FHe FH = (5.3) n ( FH + FH ) t d FH = (5.4) N n Onde: FH,FH, FH : fluxo de conversão à esquerda, de travessa e e t d conversão à dreta, respectvamente [cp/h]; N, n : número de faxas dsponíves na psta de acesso e número de faxas reservadas para o fluxo de conversão à esquerda, respectvamente; No caso de seta dreconal msta, ou seja, quando duas ou as três dreções de fluxos são controladas pelo mesmo grupo focal, é necessáro calcular as taxas de conversão à esquerda (f e ) e à dreta (f d ) para dentfcar as faxas com snalzação msta. FH f = e e FH e FH f = d d FH (5.5) 110
128 Chegada de veículos na nterseção vára Os veículos que chegam à nterseção vára, no decorrer do período de um cclo, devem ser lberados durante seus respectvos tempos de verde. Para determnar-se a taxa méda de chegada de veículos ou fluxo médo de veículos por cclo (F ), necesstase conhecer o volume horáro (FH ) e o cclo semafórco (C). Admtndo-se, que o fluxo dstrbu-se unformemente pelas faxas dsponíves da psta de acesso, pode-se determnar o fluxo médo de chegada: FH C F = 3600 N Onde: [cp / cclo / faxa] (5.6) F : fluxo médo de veículos por cclo [cp/cclo/faxa]; FH : fluxo horáro de veículos por psta de acesso [cp/h]; C : cclo semafórco [s]; N : número de faxas dsponíves. O fluxo médo de chegada de veículos (F ) sera sufcente para calcular o tempo necessáro para o escoamento destes veículos, se o ntervalo entre dos veículos consecutvos fosse unforme. Devdo as varações do Headway, provocadas pelas dferentes velocdades dos veículos e pela osclação do volume de tráfego, o número de chegadas por cclo pode ser maor do que a taxa méda (F ). Consderando que todos os veículos devem ser lberados durante o mesmo cclo de chegada, logo o tempo de verde devera ser calculado para o maor número de chegada de veículos. Porém, por restrções de tempo e de espaço e para garantr maor efcênca e capacdade de escoamento, é necessáro estabelecer um lmte máxmo para o atendmento da demanda, ou seja, a defnção do nível de garanta de não haver sobrecarga. 111
129 Dversos pesqusadores, entre eles Greenshelds e Webster, consderam a dstrbução de Posson como a mas ndcada para descrever a osclação no volume de tráfego. Adota-se a Dstrbução de Posson para representar a varação de chegadas de veículos e de pedestres na nterseção, logo a freqüênca relatva de chegadas de veículos pode ser expressa pela Dstrbução Dscreta de Posson: F P(x) = e F x! x (5.7) Onde: P (x) : Probabldade de chegada de exatamente (x) veículos, por faxa, no período de um cclo. F : fluxo médo de veículos por cclo [cp/cclo/faxa]; A qualdade de atendmento da demanda é representada por uma determnada probabldade da capacdade de lberação dos veículos não ser ultrapassada P(x F). A escolha da probabldade de não haver sobrecarga deve ser defnda prevamente. Conhecendo-se a probabldade escolhda, P(x F), e o número médo de chegadas de veículos (F ), determna-se o numero máxmo admssível de (F) chegadas através da equação ou da Fgura 5.1. A probabldade P(x F) =0,85 ndca que, em 85% dos casos, o numero de chegadas não ultrapassará (F) veículos por cclo. Ou seja, apenas 15% dos cclos vão chegar mas do que (F) veículos. Estes veículos adconas serão lberados no próxmo cclo. A escolha de probabldades elevadas pode proporconar uma maor freqüênca de tempo ocoso, sempre que o número de chegadas for menor do que o valor máxmo admssível (F), logo a capacdade de tráfego da nterseção dmnu, alem de aumentar o tempo de espera dos outros fluxos que aguardam a oportundade de travessa. Por outro lado, baxas probabldades provocam aumento do tempo de espera e contrbuem para formação de flas crescentes. Aconselha-se utlzar algo no ntervalo 0, 70 P(x F) 0, 95 (PORTO, 1997). 112


130 Fgura 5.1. Dagrama da dstrbução de Posson. 113
131 Dstrbução das fases A dstrbução de fases depende das característcas geométrcas da nterseção, da demanda de veículos e das regras de controle de tráfego. Quanto maor o numero de pstas de acesso à nterseção e de movmentos permtdos, maor será o número de pontos de confltos entre os fluxos, sendo necessáro mplementar um número maor de fases, para evtar a lberação smultânea de fluxos confltantes. Em alguns casos, para possbltar uma programação semafórca com menos de cnco fases e cclos nferores a 120 segundos, faz se ndspensável reduzr o numero de movmentos permtdos, garantdo-se uma maor capacdade de fluxo da nterseção e um menos tempo médo de espera, por veículo, nos semáforos fechados. Em síntese, admtndo-se uma determnada qualdade de atendmento da demanda de veículos e pedestres, a melhor alternatva de dstrbução de fases é aquela que proporcona maor segurança e o menor cclo resultante Metodologa de programação semafórca Headways Representa o ntervalo de tempo entre os momentos em que a dantera de dos veículos consecutvos atngem a lnha de retenção. Com relação ao prmero, como não exste nenhum outro a sua frente, seu headway nclu o tempo de reação e de arrancada. Devdo à resstênca ncal para vencer a nérca e pela proxmdade da lnha de retenção, os prmeros veículos atngem a lnha de retenção em processo de aceleração, enquanto, os últmos veículos ultrapassam em regme de fluxo de saturação com velocdade constante. Portanto, os headways vão dmnundo, à medda que aumenta a ordem de localzação do veículo na fla até osclar em torno de um valor mínmo denomnado por headway de saturação (H s ). Isso ocorre quando o escoamento atnge o regme de fluxo de saturação, que corresponde ao fluxo máxmo admssível. O headway, dos prmeros veículos da fla, pode ser decomposto em duas componentes: uma correspondente ao headway de saturação (H s ) e a outra ( h ) a parcela da nérca anda não dsspada, pelo veículo de ordem, no momento em que este atnge a lnha de retenção, ou seja: h H = H Onde: s s + h para para = 12,, 3,...,k 1,k > k h : Headway do veculo de ordem, na corrente de fluxo, [s]; (5.8) 114
132 H s : Headway de saturação corresponde ao escoamento de veículos em regme de fluxo máxmo [s]. h : parcela da nérca do veículo de ordem, anda não dsspada nteramente [s]; K : número de ordem do últmo veículo cujo headway anda ncorpora a parcela devda à nérca ncal da fla; Tempo de Inérca O tempo de nérca (T ) compreende o somatóro das parcelas de h que correspondem ao tempo perddo pelos prmeros veículos para vencer a nérca ncal no momento que eles atngem a lnha de retenção. Assm, o tempo de nérca é calculado: T n = k = 1 h k H Onde: T n : tempo de nérca [s]; s (5.9) h : Headway do veculo de ordem, na corrente de fluxo, [s]; K : número de ordem do últmo veículo cujo headway anda ncorpora a parcela devda à nérca ncal da fla; H s : Headway de saturação corresponde ao escoamento de veículos em regme de fluxo máxmo [s]. Tempo Adconal de Ultrapassagem A dnâmca de deslocamentos do tráfego mpede a nterrupção medata de um fluxo de veículos, no momento da mudança de fase. Após um período do tempo de verde, quando a luz amarela é aconada, o motorsta reage à nformação e decde se é possível frear o veículo com segurança. Dependendo da velocdade de deslocamento e da dstânca em que o veículo se encontra da lnha de retenção, pode não haver condções de parar o carro antes da área de conflto da nterseção. Portanto, aqueles veículos, que estão a uma dstânca da lnha de retenção menor do que a dstânca de frenagem, devem ncar a travessa após o apagar da luz verde. O tempo adconal de ultrapassagem (T au ) é o ntervalo de tempo contato a partr do níco do foco de luz amarela até o nstante em que a dantera do últmo veículo do fluxo nterrompdo atnge a lnha de retenção e nca sua travessa. 115
133 Tempo de amarelo O tempo de amarelo é um tempo de transção entre a mudança do foco de aberto (verde) para fechado (vermelho). Tem por objetvo nformar que o fluxo será nterrompdo, logo, deve-se começar o processo de frenagem do veículo. O tempo de amarelo é calculado conforme: V Tam = t r + (5.10) 2 d Onde: T am : tempo de amarelo [s]; t r : tempo de reação contado a partr do níco do tempo de amarelo até o momento de aconamento do freo [s]; V : Velocdade de deslocamento antes da frenagem [m/s]; d : desaceleração [m/s 2 ]. Tempo de Verde O tempo de verde tem que ser sufcente para escoar o fluxo máxmo (F) de veículos, por cclo. Este fluxo é determnado com base no número médo de chegadas de (F ) veículos, por cclo, coletado em campo e em uma determnada probabldade P(F) não haver sobrecarga. Essa probabldade é defnda em função do grau de qualdade desejado para o atendmento da demanda de veículos e deve ser escolhda entre o ntervalo de 0,70 a 0,95 (PORTO, 1997). O tempo de verde é expresso pelo somatóro do headway dos (F) veículos que devem ser lberados, por cclo, subtrando-se o tempo adconal de ultrapassagem médo ( T T au v ), que é aprovetado para ncar a travessa. = F = 1 h T au (5.11) A expressão pode ser reescrta separando-se o headway em duas parcelas, com e sem o resíduo da nérca: T v Onde: k = h + h T F = 1 = k+ 1 T v au : tempo de verde [s]; (5.12) h : headway do veículo de ordem [s]; T au : tempo adconal de ultrapassagem médo [s]; 116
134 F K : fluxo máxmo admssível de veículos, por cclo, para uma determnada probabldade P(F) de não haver sobrecarga [cp/cclo/faxa]; : número de ordem do últmo veculo da fla cujo headway anda ncorpora um tempo perddo devdo a nérca ncal. Os headways dos prmero veículos (k), geralmente, são maores do que os headways dos últmos veículos da corrente de fluxo, pos ncorporam uma parcela da nérca. Enquanto os headways dos últmos veículos varam em torno de um valor mínmo denomnado headway de saturação (H s ). Portanto os headways dos prmeros veículos podem ser consderados guas ao headway de saturação (H s ) acrescdo de parcelas de ( h ) correspondentes a nérca. Logo a formulação do tempo de verde é: T T T v v v = = = k = 1 ( F K) k ( Hs h ) + ( F K) = 1 k = 1 h h + F H + s H T s au T au H s T au (5.13) Substtundo pelo tempo de nérca apresentado na equação 5.10 tem-se: T v = Tn + F Hs T au (5.14) Onde: T v T n F H s : tempo de verde [s]; : tempo de nérca [s]; : fluxo máxmo admssível de veículos, por cclo, para uma determnada probabldade P(F) de não haver sobrecarga [cp/cclo/faxa]; : Headway de saturação [s]; T au : tempo adconal de ultrapassagem médo [s]. Tempo de Verde e Vermelho efetvo Na prátca somente exstem duas stuações a corrente de fluxo não é nterrompda, tempo de verde efetvo, ou a corrente de fluxo é nterrompda, tempo de vermelho efetvo. O tempo de verde efetvo refere-se ao tempo efetvamente utlzado para lberar o fluxo máxmo admssível (F) de veículos, por cclo, em regme de fluxo 117
135 de saturação. Normalmente, o verde efetvo é um pouco maor do que o verde, pos, mesmo após o fnal do verde, podem passar alguns veículos. T vef = F.H s (5.15) Onde: T vef : tempo de verde efetvo [s]; H s : Headway de saturação [s]. Pode-se escrever a formulação acma em função do tempo de verde, nérca e adconal de ultrapassagem, substtundo-se este valor na equação 5.87 do tempo de verde e colocando-se em evdênca o tempo de verde efetvo: T vef v ( T au T ) = T + (5.16) Onde: T v : tempo de verde [s]; n T au : tempo adconal médo de ultrapassagem [s]; T n : tempo de nérca [s]; T vef : tempo de verde efetvo [s]. Tempo de Entreverdes O deslocamento da projeção de um veículo sobre a superfíce da va, é representado por uma faxa. Consderam-se, ao nvés de faxas de deslocamentos, lnhas de deslocamento que correspondem aos exos dessas faxas. Esta smplfcação não compromete o resultado, pos sempre consdera-se a stuação mas crítca e o resultado fnal é arredondado para undades nteras. Assm, o cruzamento de fluxos confltantes é representado por pontos de conflto (pc) (Fgura 5.2). Para reduzr o número de acdentes nos pcs, calcula-se o ntervalo de tempo entre o fm de um tempo de verde e o níco do próxmo verde, este ntervalo de tempo é chamado de tempo de entreverdes. A duração do tempo de entreverdes é defnda com base no tempo adconal de ultrapassagem, utlzado pelo últmo veículo para ncar sua travessa e no tempo gasto para atngr o ponto de conflto (PC). O tempo de entreverdes é determnado conforme: T e Onde: au ( T T ) = T + (5.17) T e u a : tempo de entreverdes [s]; 118
![T au : tempo adconal de ultrapassagem [s]; T u : tempo de ultrapassar, tempo gasto por este últmo veículo para percorrer a dstânca entre a lnha de retenção e o ponto de conflto, adconando a esta](/docs-images/66/54419946/images/136-0.jpg "dstânca o comprmento do veículo [s]; T a : tempo de atngr, tempo gasto pelo prmero veículo (da próxma fase) para vencer sua nérca e percorrer a dstânca que o separa do respectvo ponto de conflto [s].")
136 T au : tempo adconal de ultrapassagem [s]; T u : tempo de ultrapassar, tempo gasto por este últmo veículo para percorrer a dstânca entre a lnha de retenção e o ponto de conflto, adconando a esta dstânca o comprmento do veículo [s]; T a : tempo de atngr, tempo gasto pelo prmero veículo (da próxma fase) para vencer sua nérca e percorrer a dstânca que o separa do respectvo ponto de conflto [s]. Fgura 5.2. Ponto de conflto. Os tempos de ultrapassar ( T u ) e atngr ( T a ) são calculados com base na velocdade e na aceleração dos veículos e nas respectvas dstâncas das lnhas de retenção ao ponto de conflto. Em cada fase, geralmente, são lberadas mas de uma corrente de fluxo, o que mplca a ocorrênca de város pontos de conflto no processo de cada mudança de fases. Calcula-se para cada ponto de conflto, o valor do tempo de entreverdes e escolhe-se o maor deles, ponto de conflto crítco, para nserr na mudança de fases. O tempo de ultrapassar ( T ) gasto pelo ultmo veículo a realzar a travessa da u área de conflto de uma nterseção, é calculado com base na velocdade (V u ) desenvolvda por este veículo, e na dstanca (d u ) percorrda durante a travessa. A dstânca é medda a partr da lnha de retenção até o ponto de conflto (PC). A 119
137 velocdade empregada na travessa é medda em campo. O tempo de ultrapassar é determnado conforme um dos dos casos: Caso 1 - O veículo ultrapassa com velocdade constante: admte-se que o ultmo veículo realza a travessa com velocdade constante (V u ), gual a velocdade de deslocamento da corrente de tráfego consderada. Logo T u é gual: d u T u = (5.18) Vu Caso 2 O últmo veículo ultrapassa em processo de aceleração esta stuação somente é admtda quando exste um ponto de ônbus ou táx medatamente antes da nterseção. Neste caso, consdera-se que o últmo veículo da corrente nterrompda nca sua travessa no momento fnal do tempo de verde, partndo da nérca. Logo T u é gual: T u 2 du a) a = 2 Vu + 2 a d b) 2 a Vu Onde: T u u para para ( d d ) u ( d > d ) : tempo de ultrapassar o ponto de conflto [s]; u ac ac (5.19) d u : dstânca de ultrapassar [m]; a : aceleração [m/s 2 ]; V u : velocdade de ultrapassar [m/s]; d ac : dstânca de aceleração, dstânca percorrda a partr da nérca até desenvolver a velocdade máxma admssível (V u ) [m]. O tempo de atngr é meddo a partr do níco da luz verde. O valor deste tempo depende do tempo gasto na reação e arrancada, da aceleração, da velocdade máxma admssível e da dstânca da lnha de parada até o ponto de conflto. O tempo de atngr é determnado conforme o caso: o prmero veículo atnge o ponto de conflto a partr da nérca: o prmero veículo da corrente de fluxo lberada realza a travessa a partr da nérca com aceleração constante. O tempo de atngr ( T ) o ponto de conflto é análogo ao caso dos do tempo de ultrapassar, logo: a 120
138 T a Onde: 2 da a) + h1 a = 2 Va + 2 a d b) 2 a Va T a a + h 1 para para ( d d ) a ( d > d ) : tempo de atngr o ponto de conflto [s]; a ac ac (5.20) d a : dstânca de atngr [m]; a : aceleração [m/s 2 ]; V a : velocdade de atngr [m/s]; d ac : dstânca de aceleração, dstânca percorrda a partr da nérca até desenvolver a velocdade máxma admssível (V u ) [m]. h 1 : headway do prmero veículo [s]; No caso de pedestres o tempo gasto para ultrapassarem a área de conflto é calculado dvdndo-se a dstânca de travessa ( d ) entre os dos meos-fos das calçadas opostas pela velocdade de camnha ( v ). A velocdade de camnhada vara entre 0,5 e 1,5 m/s, geralmente, adota-se 1,2 m/s como velocdade de camnhada, logo: d t t u = (5.21) Vc O tempo de atngr para o pedestre será sempre nulo, pos a área de conflto da faxa de travessa nca-se junto ao meo fo e a reação do pedestre ao aconamento de luz verde, admte-se ser medata. c t Determnação do atraso O atraso em nterseções é classfcado em atraso unforme e aleatóro. Se a demanda é menor que a capacdade e os veículos chegam unformemente a uma taxa constante, este tpo de atraso é classfcado como unforme. Quando as chegadas não são unformes e sm aleatóras, o que é mas provável de acontecer em nterseções soladas e o fluxo está próxmo da capacdade, este tpo de atraso é classfcado com aleatóro. Exste uma tercera parte da equação de Webster que representa um fator de calbração baseados nos expermentos realzados. 121
139 O calculo do atraso pelo método de Webster é expresso: c 1 d = 2 1 g c g c 2 x + x 2q 2 ( 1 x) c 0, 65 2 q 1 3 x 2+ 5 g c Onde: d : atraso médo por veículo [s]; c : tempo de cclo [s]; g : tempo de verde efetvo [s] x : grau de saturação, relação entre o fluxo e a capacdade; q : fluxo [veículos/s]. (5.22) O grau de saturação é a relação entre o número de veículos que desejam passar e o número de veículos que podem consegur passar durante certo período de tempo, ou seja, reflete, em termos prátcos, o nível de carregamento. Em termos matemátcos, o grau de saturação é defndo por: q c x = (5.23) s g Onde: q : fluxo [veículos/h]. c : tempo de cclo [s]; g : tempo de verde efetvo [s] s : fluxo de saturação da aproxmação (veículos/h); Logo, substtundo-se a equação 5.24 na 5.23, tem-se que o atraso: c 1 d = 2 1 g c q s 2 2 g c + 2q 1 g c (5.24) Processo de análse de nterseção solada A Fgura 5.3 mostra o fluxograma do processo de análse de nterseção solada. 122
140 Fgura 5.3. Processo de análse de nterseção solada Contrbuções para o método do KOORD A metodologa desenvolvda por Porto em 1982, tem como ponto de partda o prévo conhecmento dos tempos de verde e vermelho de cada nterseção e, consequentemente, o tempo de cclo, que tem que ser únco para todas as nterseções que compõe o corredor. A coordenação consdera uma velocdade méda ao longo do corredor tanto para o transporte ndvdual quanto para o coletvo e não possu meddas de desempenho para mensurar a qualdade das faxas de onda verde. O KOORD contempla a coordenação bmodal, ou seja, possblta a otmzação de duas faxas de onda verde, uma para o Transporte Indvdual (TI) e outra para o Transporte 123
 no fluxo; Coordenação para o Transporte Coletvo (TC) no fluxo")
141 Coletvo (TC). Entretanto, não permte a coordenação separada para o TI e para o TC para uma únca dreção de tráfego. A metodologa fo alterada e passou a estabelecer ses tpos de coordenações ndependentes: Coordenação para o Transporte Indvdual (TI) no fluxo; Coordenação para o Transporte Coletvo (TC) no fluxo Coordenação para o TI no fluxo com TC no contrafluxo; Coordenação para o TI no fluxo e contrafluxo; Coordenação para o TC no fluxo e contrafluxo; Coordenação para o TI e TC no fluxo e contrafluxo, Bmodal. O KOORD parte do prncípo que a programação semafórca de cada nterseção solada é ótma. Os outros programas de computador ncam o processo de otmzação analsando cada nterseção soladamente, partndo das nformações de volume de trafego por movmento permtdo e das característcas geométrcas da nterseção. Adconou-se ao programa a metodologa de otmzação de nterseção solada desenvolvda por Porto, Velocdade varável por trecho. O KOORD consdera uma velocdade méda ao longo do corredor tanto para o TI quanto para o TC. A fm de possbltar uma velocdade varável por trecho, alterouse a formulação do ponto de encontro das velocdades (TP) e dos aconamentos ncas, transformando a dferença de velocdade, de um trecho para outro, em tempo a mas ou a menos no aconamento da nterseção subseqüente (Fgura 5.4), ou seja: 124
142 TP 1 Fgura 5.4. Velocdade méda e varável por trecho. VR.VG.C VR + VG 1 1 = (5.25) 1 Onde: TP : Ponto de encontro das velocdades do fluxo com o contrafluxo; VR 1 : velocdade ncal no fluxo [m/s]; VG 1 : velocdade ncal no contrafluxo [m/s]; C : tempo de cclo [s]. E o aconamento no fluxo e contrafluxo ncal da nterseção 1 e as subseqüentes será: EI TR 1 = frac VR1.C, para a prmera nterseção. EI TG = 1 frac 1 VG1.C SR - SR-1 TR = + frac TR-1, para todo 2 n. VR.C SG - SG-1 TG = + 1 frac TG-1, para todo 2 n. VG.C Onde: EI : excentrcdade ncal [m]; TR : aconamento da nterseção no fluxo em relação à nterseção 1 [c]; TG : aconamento da nterseção no contrafluxo em relação à nterseção 1 [c]; SR : posção da nterseção no fluxo [m]; SG : posção da nterseção no contrafluxo [m]; VR : velocdade no trecho no fluxo [m/s]; VG : velocdade no trecho no contrafluxo [m/s]; C : tempo de cclo [s]; : dentfcador da nterseção; n : número de nterseções do corredor em análse. 125
143 Meddas de desempenho. Acrescentou-se à metodologa as meddas desempenho, utlzadas pelo PASSER V, para expressar a qualdade da faxa de onda verde. O PASSER V mensura a qualdade através da efcênca e a acessbldade (Tabela 5.2). A efcênca é o percentual do cclo usado pela faxa de onda verde e a acessbldade é o percentual do tempo de verde mínmo da dreção usado pela faxa de onda verde. A efcênca e acessbldade são expressas pelas fórmulas (CHAUDHARY, 2003): Tabela 5.2. Efcênca e acessbldade. Efcênca Acessbldade BR BR Efcênca no fluxo (%) = * 100 Acessbldade fluxo(%) = * 100 C mn.ve BG BG Efcênca no contrafluxo (%) = * 100 Acessbldade contrafluxo (%) = * 100 C mn.ve ( BR + BG) ( BR + BG) Efcêncatotal (%) = * 100 Acessbldade total (%) = * C mn.ve mn.ve ( ) Onde: BR : faxa de onda verde no fluxo; BG : faxa de onda verde no contrafluxo; C : tempo de cclo; mn. Ve : menor tempo de verde da dreção; mn.ve R : menor tempo de verde da dreção do fluxo; mn.ve g : menor tempo de verde da dreção do contrafluxo dentre. R + G Coordenação para o Transporte Indvdual (TI) no fluxo. A coordenação para o TI no fluxo consste na procura pelo menor tempo de verde efetvo das nterseções que compõe o corredor em análse e a aplcação da velocdade de cada trecho para estabelecmento dos aconamentos de cada controle semafórco. Adota-se a nterseção 1 como referênca para cálculo dos aconamentos das nterseções subseqüentes com base na formulação abaxo: TR Onde: TR SR VR C n = frac TR -1 SR - SR + VR.C -1-1, tal que 1< n : aconamento da nterseção [c]; : posção da nterseção [m]; : velocdade no trecho [m/s]; : tempo de cclo [s]; : dentfcador da nterseção; : número de nterseções do corredor em análse. 126
144 Coordenação para o Transporte Coletvo (TC) no fluxo. A coordenação para o TC no fluxo dfere do TI pela adção do tempo de parada nos pontos de ônbus no calculo dos aconamentos ncas de cada nterseção. Adotase a nterseção 1 como referênca para cálculo dos aconamentos das nterseções subseqüentes com base na formulação abaxo: TR = frac TR -1 SR - SR + VR.C -1-1 HR + C -1, tal que 1< n Onde: TR : aconamento da nterseção [c]; SR : posção da nterseção [m]; VR : velocdade no trecho [m/s]; HR : tempo de permanênca no ponto de parada [s]; C : tempo de cclo [s]; : dentfcador da nterseção; n : número de nterseções do corredor em análse Coordenação para o Transporte Indvdual (TI) no fluxo com Transporte Coletvo (TC) no contrafluxo. A coordenação para o TI no fluxo com TC no contrafluxo é semelhante à coordenação do TI no fluxo e contrafluxo do método KOORD, porém, no sentdo do contrafluxo, consdera-se, no cálculo dos aconamentos ncas, a formulação do TC, ou seja: SR - SR-1 Fluxo : TR = + frac TR-1, tal que 1< n. VR-1.C SG - SG-1 HG-1 Contrafluxo : TG = frac TG-1, tal que 1< n. VG-1.C C Onde: TR : aconamento da nterseção no fluxo para TI [% cclo]; TG : aconamento da nterseção no contrafluxo para TC [% cclo]; SR : posção da nterseção no fluxo para TI [m]; SG : posção da nterseção no contrafluxo para TC [m]; VR : velocdade no trecho no fluxo para TI [m/s]; VG : velocdade no trecho no contrafluxo para TC [m/s]; HG : tempo de permanênca no ponto de parada [s]; C : tempo de cclo [s]; 127
145 n : dentfcador da nterseção; : número de nterseções do corredor em análse Coordenação para o Transporte Indvdual (TI) no fluxo e contrafluxo. A coordenação para o TI, no fluxo e contrafluxo, é a mesma adotada pelo KOORD, ou seja: SR - SR-1 Fluxo : TR = frac TR-1 +, tal que 1< n. VR-1.C SG - SG-1 Contrafluxo : TG = + 1 frac TG-1, tal que 1< n. VG-1.C Onde: TR : aconamento da nterseção no fluxo [c]; TG : aconamento da nterseção no contrafluxo [c]; SR : posção da nterseção no fluxo [m]; SR : posção da nterseção no contrafluxo [m]; VR : velocdade no trecho no fluxo [m/s]; VG : velocdade no trecho no contrafluxo [m/s]; C : tempo de cclo [s]; : dentfcador da nterseção; n : número de nterseções do corredor em análse Coordenação para o Transporte Coletvo (TC) no fluxo e contrafluxo. A coordenação para o TC, no fluxo e contrafluxo, dfere da empregada no KOORD, pos estava nserda no processo de otmzação da coordenação Bmodal. A formulação fca parecda com a do TI, adconando-se o tempo de parada nos pontos de ônbus, ou seja: SR - SR-1 HR Fluxo : TR = frac TR , tal que 1< n. VR-1.C C SG - SG-1 HG-1 Contrafluxo : TG = frac TG-1, tal que 1< n. VG-1.C C Onde: TR : aconamento da nterseção no fluxo [% cclo]; TG : aconamento da nterseção no contrafluxo [% cclo]; SR : posção da nterseção no fluxo l [m]; SR : posção da nterseção no contrafluxo [m]; VR : velocdade no trecho no fluxo [m/s]; 128
146 VG : velocdade no trecho no contrafluxo [m/s]; HR : tempo de permanênca no ponto de parada no fluxo [s]; HG : tempo de permanênca no ponto de parada no contrafluxo [s]; C : tempo de cclo [s]; : dentfcador da nterseção; n : número de nterseções do corredor em análse Coordenação para o Transporte Indvdual (TI) e Transporte Coletvo (TC) no fluxo e contrafluxo - BIMODAL A coordenação Bmodal é a unão da coordenação solada do TI, fluxo e contrafluxo, com a do TC, fluxo e contrafluxo. O processo começa com a obtenção da faxa de onda verde máxma para o TI. Em seguda para cada otmzação da faxa de onda verde do TC solada, calcula-se a maor faxa de onda verde para ambos os modos superpondo-se os dos dagramas espaço-tempo e realzando os deslocamentos possíves dos tempos de vermelho. Transporte Indvdual Transporte Coletvo Fluxo TR 1 SR[] - SR[ -1] VR[ -1].C [] = frac TR - + [] [] EO + SRO[] HR TR = frac TR VRO.C C Contrafluxo TG 1 SG[] - SG[ -1] VG[ -1].C [] = 1 frac TG - + [] EO + SGO[] HG TG = 1 frac TR VGO.C C [] Comparação entre o KOORD e o COORBUS Adconou-se a metodologa de coordenação semafórca desenvolvda por Porto a análse de nterseção solada antes do calculo da coordenção, tornando possível a modfcação das fases e tamanhos de cclo. A tabela 5.3 apresenta uma compraração entre o KOORD, método do porto desenvolvdo em 1982, e as modfcações realzadas, Bmodal. 129
147 Tabela 5.3. Comparação entre o KOORD e o COORBUS. Descrção KOORD BIMODAL Fluxo Coordenação smples TI Coordenação smples TI Coordenação smples TC Coordenação smples TC Contrafluxo Coordenação smples TI Coordenação smples TI Coordenação smples TC Coordenação smples TC Coordenação para o TI Coordenação para o TC Fluxo e Contrafluxo Coordenação para o TI Coordenação para o TI com TC. Coordenação para o TI com TC no contrafluxo. Coordenação para o TI, fluxo e contrafluxo, com TC, fluxo e contrafluxo. Analse de nterseção Metodologa desenvolvda não Isolada por Porto, Velocdade por trecho constante Varável Interseção solada não Sm Determnação do atraso e meddas de desempenho não Sm 5.4. Implementação da metodologa. A metodologa de coordenação semafórca e análse de nterseção solada, desenvolvda por Porto, fo mplementada, com os novos recursos anterormente apresentados, na lnguagem de programação Borland Delph 7.0. Esta mplementação orgnou o novo software chamado de COORBUS. O COORBUS é um software da plataforma Mcrosoft Wndows, com recursos gráfcos, baseados na bbloteca gráfca Opengl, e relatóros com saídas para mpressoras ou arquvos no formato pdffle ou texto. O anexo III, apresenta as prncpas janelas e telas do programa desenvolvdo Lnguagem de programação O aplcatvo COORBUS fo desenvolvdo na lnguagem de programação Borland Delph versão 7. Delph é uma lnguagem de programação orentada a objetos (POO) desenvolvda pela Borland. É um produto únco em sua categora combnando códgos totalmente compláves, ferramentas vsuas, tecnologa para a composção de bases de dados escaláves e possu facldades para um rápdo desenvolvmento em 130
148 plataforma Mcrosoft Wndows e aplcações Clente / Servdor. A POO é um conceto desenvolvdo para facltar o uso de códgos de desenvolvmento em nterfaces gráfcas. Sendo a Borland, uma das prmeras a entrar neste novo conceto, possu suas prncpas lnguagens de programação (tas como: Object Pascal e C++), totalmente voltadas para este tpo de programação. Objeto é um componente que possu propredades, métodos e eventos. Nas propredades estão as característcas do objeto, que serão encolhdas pelo usuáro. Os métodos são as ações que o objeto deverá executar. E os eventos são os estímulos que o objeto sofre, como por exemplo, um clque, ou ao sar (ANSELMO, 1997) Ambente gráfco. O ambente gráfco fo construído com os recursos da bbloteca gráfca OpenGL, que em nglês é Open Graphcs Lbrary, Bbloteca Gráfca Aberta. Aberta sgnfca ndependente do fabrcante. A bbloteca OpenGL fo ntroduzda em 1992 pela Slcon Graphcs, no ntuto de conceber uma API (Interface de Programação de Aplcação) gráfca ndependente de dspostvos de exbção. Com sto, sera estabelecda uma ponte entre o processo de modelagem geométrca de objetos, stuadas em um nível de abstração mas elevado, e as rotnas de exbção e de processamento de magens mplementadas em dspostvos (hardware) e sstemas operaconas específcos. As função utlzada pelo OpenGL para desenhar um ponto na tela, por exemplo, possu os mesmos nome e parâmetros em todos os sstemas operaconas nos quas OpenGL fo mplementada, e produz o mesmo efeto de exbção em cada um destes sstemas. OpenGL é uma nterface de software com o hardware gráfco desenvolvda para aplcações gráfcas bdmensonas (2D) e trdmensonas (3D), extremamente portável e rápda, escrta em lnguagem de programação C e ndepende do sstema operaconal (MANSSOUR, 2001). Dante das funconaldades provdas pelo OpenGL, tal bbloteca tornou-se um padrão amplamente utlzado na ndústra de desenvolvmento de aplcações, devdo a facldade de aprendzagem, pela establdade das rotnas e pelos resultados vsuas consstentes para qualquer sstema de exbção concordante com este padrão. Dversos jogos, aplcações centífcas e comercas tem utlzado OpenGL como ferramenta de apresentação de recursos vsuas, prncpalmente com a adoção deste padrão por parte dos fabrcantes de placas de vídeo destnadas aos consumdores doméstcos. 131
149 Entre os recursos gráfcos dsponíves pelo OpenGL, podem ser destacados os seguntes (WANGENHEIM, 2004): Modos de desenho de pontos; Ajuste de largura de lnhas; Aplcação de transparênca; Atvação/desatvação de serrlhamento (alasng); Mapeamento de superfíces com textura; Seleção de janela de desenho; Manpulação de fontes/tpos de lumnação e sombreamento; Transformação de sstemas de coordenadas; Transformações em perspectva; Combnação de magens (blendng); As mplementações do OpenGL geralmente provêem bblotecas auxlares, tas como a GLU (OpenGL Utlty lbrary), utlzada para realzar tarefas comuns, tas como manpulação de matrzes, geração de superfíces e construção de objetos por composção. As especfcações do OpenGL não descrevem as nterações entre OpenGL e o sstema de janelas utlzado (Wndows, X Wndow etc). Assm, tarefas comuns em uma aplcação, tas como crar janelas gráfcas, gerencar eventos provenentes de mouse e teclado, e apresentação de menus fcam a cargo de bblotecas própras de cada sstema operaconal (BARBOSA, 2003) Procedmentos gráfcos desenvolvdos em Opengl. A conexão entre a bbloteca gráfca OpenGL e a lnguagem Borland Delph fo estabelecda através de um componente crado por Mustafa Kasap, da Turqua. Com o componente nstalado, escolheram-se as prmtvas geométrcas (Anexo III) que compõem os procedmentos gráfcos desenvolvdos para o COORBUS. A segur apresentam-se os procedmentos gráfcos desenvolvdos (Tabela 5.4 a 5.7): 132
150 Tabela 5.4. Representação gráfca do verde e vermelho efetvo para o fluxo. Verde do fluxo Vermelho do fluxo Procedmento procedure verde_fluxo(x1,x2,y,esp:real); procedure vermelho_fluxo(x1,x2,y,esp:real); Var y1,y2: real; Var y1,y2: real; Begn Begn y1:=y-esp/2; y1:=y-esp/2; y2:=y+esp/2; y2:=y+esp/2; gldsable(gl_line_stipple); gldsable(gl_line_stipple); glcolor3f(1,0,0); glcolor3f(0,1,0); glbegn(gl_lines); glbegn(gl_lines); glvertex2f(x1,y1); glvertex2f(x1,y1); glvertex2f(x1,y2); glvertex2f(x1,y2); glend; glend; glbegn(gl_lines); glbegn(gl_lines); glvertex2f(x1,y1); glvertex2f(x1,y1); glvertex2f(x2,y1); glvertex2f(x2,y1); glend; glend; glbegn(gl_lines); glbegn(gl_lines); glvertex2f(x2,y2); glvertex2f(x2,y2); glvertex2f(x2,y1); glvertex2f(x2,y1); glend; glend; glbegn(gl_lines); glbegn(gl_lines); glvertex2f(x1,y2); glvertex2f(x1,y2); glvertex2f(x2,y2); glvertex2f(x2,y2); glend; glend; glbegn(gl_lines); End; glvertex2f(x1,y1+(y2-y1)/2); glvertex2f(x2,y1+(y2-y1)/2); glend; End; Resultado Gráfco 133
151 Tabela 5.5. Representação gráfca do tempo de verde e vermelho efetvo para o contrafluxo. Verde do contrafluxo Vermelho do contrafluxo Procedmento procedure verde_contrafluxo(x1,x2,y,esp:real); procedure vermelho_contrafluxo(x1,x2,y,esp:real); Var y1,y2: real; var,passo:real; y1,y2: real; Begn Begn y1:=y-esp/2; y1:=y-esp/2; y2:=y+esp/2; y2:=y+esp/2; gldsable(gl_line_stipple); gllnestpple(1, $00ff); glcolor3f(1,0,0); glenable(gl_line_stipple); glbegn(gl_lines); glcolor3f(0,1,0); glvertex2f(x1,y1); glbegn(gl_lines); glvertex2f(x1,y2); glvertex2f(x1,y1); glend; glvertex2f(x1,y2); glbegn(gl_lines); glend; glvertex2f(x1,y1); glbegn(gl_lines); glvertex2f(x2,y1); glvertex2f(x1,y1); glend; glvertex2f(x2,y1); glbegn(gl_lines); glend; glvertex2f(x2,y2); glbegn(gl_lines); glvertex2f(x2,y1); glvertex2f(x2,y2); glend; glvertex2f(x2,y1); glbegn(gl_lines); glend; glvertex2f(x1,y2); glbegn(gl_lines); glvertex2f(x2,y2); glvertex2f(x1,y2); glend; glvertex2f(x2,y2); :=0; passo:=(x2-x1)/trunc((x2-x1)/2); glend; whle <(x2-x1) do End; Begn End; glbegn(gl_lines); glvertex2f(x1+,y2); glvertex2f(x1++passo,y1); glend; :=+passo; End; End; Resultado Gráfco 134
152 Tabela 5.6. Representação gráfca da faxa de onda verde para o Transporte Indvdual (TI) e Transporte Coletvo (TC). Faxa de onda verde para o TI Faxa de onda verde para o TC Procedmento procedure ondaverde_ndvdual(x1,y1,x2,y2:real); procedure ondaverde_publco(x1,y1,x2,y2:real); Begn gllnewdth(strtofloat(parametros.espov.text)); gldsable(gl_line_stipple); If Parametros.CheckBox_pb.Checked then //grafco pb Begn gllnewdth(strtofloat(parametros.espov.text)); If Parametros.CheckBox_pont.Checked then glenable(gl_line_stipple) glcolor3f(0,0,0) Else gldsable(gl_line_stipple); Else glcolor3f(0,1,0); glbegn(gl_lines); glvertex2f(x1,y1); // prmero vértce glvertex2f(x2,y2); // segundo vértce glend; // fnal do desenho If Parametros.CheckBox_pb.Checked then glcolor3f(0,0,0) Else glcolor3f(1,1,0); glbegn(gl_lines); glvertex2f(x1,y1); // prmero vértce glvertex2f(x2,y2); // segundo vértce glend; // fnal do desenho End; End; Resultado Gráfco Tabela 5.7. Representação gráfca dos pontos de parada de ônbus. Procedmento Resultado Gráfco procedure parada(x1,x2,y,esp:real); Begn gldsable(gl_line_stipple); glcolor3f(1,1,0); glbegn(gl_line_strip); glvertex2f(x1,y); glvertex2f(x1+0.1*(x2-x1),y); glend; glbegn(gl_line_strip); glvertex2f(x2,y); glvertex2f(x2-0.1*(x2-x1),y); glend; glbegn(gl_line_strip); glvertex2f(x1+0.1*(x2-x1),y-esp/2); glvertex2f(x1+0.1*(x2-x1),y+esp/2); glvertex2f(x2-0.1*(x2-x1),y+esp/2); glvertex2f(x2-0.1*(x2-x1),y-esp/2); glvertex2f(x1+0.1*(x2-x1),y-esp/2); glend; End; 135
153 5.7. Consderações fnas A unão, mplementação e as melhoras realzadas nas metodologas desenvolvdas por Porto, resultaram em um software mas completo, com entrada de dados e apresentação dos resultados em formado gráfco e tabelas. Na versão atual do software é possível realzar, separadamente, a analse da nterseção solada ou coordenação semafórca em corredor. 136
154 CAPÍTULO 6 - APLICAÇÃO DA METODOLOGIA 137
155 6.1. Estudo de caso A aplcação da metodologa fo realzada na cdade do Ro de Janero, no barro de Copacabana, no corredor da Avenda Atlântca, composto por dez nterseções com controle semafórco. Escolheu-se este corredor em função da dsponbldade de dados. A Companha de Engenhara de Tráfego do Muncípo do Ro de Janero (CET- RIO) forneceu os planos semafórcos, característcas geométrcas e operaconas das dez nterseções que compõem o corredor (Fgura 6.1). Fgura 6.1. Corredor Avenda Atlântca. Os planos semafórcos, característcas geométrcas e operaconas das dez nterseções estão detalhados no anexo IV. Com base nas nformações fornecdas pela CET-RIO, escolheu-se o período entre as 11:30 às 14:30 horas para estudo. Neste período o corredor não encontra-se congestonado. Com base nos dados observa-se que, o referdo período, opera com um cclo de 130 segundos para todas as nterseções e que o tercero plano semafórco é o empregado em todas as nterseções. Assm, com a defnção do período de analse da pesqusa construu-se as tabelas 6.1 e 6.2 com característcas físcas e operaconas das nterseções que compõem o corredor da Avenda Atlântca. 138
156 Tabela 6.1. Característcas físcas e operaconas das nterseções corredor Av. Atlântca. Cruzamento Interseção Tempo de verde efetvo (s) Tempo de vermelho efetvo (s) Posção da nterseção no sentdo do fluxo (m) Posção da nterseção no sentdo do contrafluxo (m) Rua Prado Junor Rua Rodolfo Dantas Rua Repúblca do Peru Rua Squera Campos Rua Fgueredo Gumarães Rua Santa Clara Rua Constante Ramos Rua Bolvar Rua Mguel Lemos Rua Francsco Sá Tabela 6.2. Característcas operaconas do corredor Av. Atlântca. Trecho Velocdade ndvdual no fluxo (Km/h) Velocdade ndvdual no contrafluxo (Km/h) Velocdade coletvo no fluxo (Km/h) Velocdade coletvo no contrafluxo (Km/h)
157 A localzação dos pontos de parada de ônbus fo feta através de levantamento de campo. Os pontos não são dentfcados por placas ou abrgos. Verfcou-se que no sentdo da nterseção um para a dez, que os pontos estão localzados depos dos semáforos e próxmos da nterseção (Fgura 6.2). No sentdo oposto, não exste defnção dos pontos de parada, cabe ao passagero snalzar que o ônbus para em qualquer ponto do corredor. Fgura 6.2. Localzação dos pontos de ônbus - Avenda Atlântca. Coma base neste levantamento de campo posconou-se os pontos de parada (Tabela 6.3) e defnu-se que o tempo médo gasto nas operações de embarque/desembarque e entrada/saída do ponto de parada é de qunze segundos. Tabela 6.3. Dstânca entre os pontos de parada de ônbus - Av. Atlântca. Trecho Ponto de ônbus Dstânca Tempo de parada no fluxo (m) (s) Rua Prado Júnor 15 2 Rua Duvver Rua Rodolfo Dantas Rua Paula Fretas Rua Squera Campos Rua Fgueredo Rua Santa Clara Rua Constante Ramos Rua Bolvar Rua Xaver da Slvera Rua Sá Ferrera

158 No corredor em analse já exste um coordenação semafórca calculada pela CET-RIO. A tabela 6.4 apresenta as defasagens de cada nterseção. Tabela 6.4. Defasagens atuas das nterseções no corredor Av. Atlântca. Cruzamento Interseção Defasagens (s) Rua Prado Junor 1 70 Rua Rodolfo Dantas 2 45 Rua Repúblca do Peru 3 75 Rua Squera Campos 4 50 Rua Fgueredo Gumarães 5 45 Rua Santa Clara 6 50 Rua Constante Ramos 7 50 Rua Bolvar 8 45 Rua Mguel Lemos 9 45 Rua Francsco Sá Com objetvo de verfcar a faxa de onda verde atual, desenvolveu no COORBUS a possbldade de desenhar o dagrama espaço-tempo (Fgura 6.3) para a defasagem e as característcas físcas e operaconas apresentadas na tabela 6.1 e 6.2. Fgura 6.3. Dagrama espaço-tempo para os dados da CET-RIO. Com base na programação semafórca atual, smulou-se a máxma faxa de onda verde, calculada pelo programa COORBUS, para transporte ndvdual, para o transporte coletvo e para ambos os modos. O resultado é apresentado nas Fgura 6.4 a Fgura 6.9, a segur: 141
 dados CET-RIO. Fgura 6.")
159 Fgura 6.4. Coordenação para o Transporte Indvdual (TI) dados CET-RIO. Fgura 6.5. Resultado da coordenação para o TI dados CET-RIO. 142

160 Fgura 6.6. Coordenação para o Transporte Coletvo (TC) dados CET-RIO. Fgura 6.7. Resultado da coordenação para o TC dados CET-RIO. 143


161 Fgura 6.8. Coordenação Bmodal dados CET-RIO. Fgura 6.9. Resultado da coordenação Bmodal dados CET-RIO. Com os dados da programação semafórca, fornecdos pela CET-RIO, obtevese uma faxa de onda verde para o transporte ndvdual de 37 segundos, para o fluxo e contrafluxo, e uma faxa de onda verde para o transporte coletvo de 45 segundos, para o fluxo e contrafluxo. A coordenação bmodal não fo possível determnar, devdo à localzação e a elevada quantdade de pontos de parada de ônbus. Uma forma de estabelecer a coordenação bmodal sera a dvsão do corredor em dos trechos, cada 144
. Fgura 6.10. Bmodal - velocdade de 50 km/h no contrafluxo para o TC. Fgura 6.11. Resultados Bmodal - 50 km/h no contrafluxo para o TC.")
162 um com cnco nterseções, outra solução é posconar e dmnur os pontos de parada de ônbus, ou aumentar a velocdade do transporte coletvo no contrafluxo. A prmera opção será aumentar a velocdade dos coletvos no contrafluxo de 40 para 50 km/h (Fgura 6.10 e Fgura 6.11). Fgura Bmodal - velocdade de 50 km/h no contrafluxo para o TC. Fgura Resultados Bmodal - 50 km/h no contrafluxo para o TC. No captulo 4, tem 4.3.1, a EBTU recomenda o espaçamento médo de 300 metros e em casos especas, corredores város, espaçamento de 300 a 500 metros. Logo, adotando-se um espaçamento de 400 metros e aumentando o tempo de parada do transporte coletvo para 30 segundos e consderando-se a mesma quantdade de pontos no contrafluxo, tem-se: 145
163 Tabela 6.5. Espaçamento dos pontos de parada de ônbus de 400 metros.. Trecho Interseções 1 Rua Prado Júnor 2 Rua Rodolfo Dantas 2 Rua Rodolfo Dantas 3 Rua Repúblca do Peru 3 Rua Repúblca do Peru 4 Rua Squera Campos 4 Rua Squera Campos 5 Rua Fgueredo Magalhães 5 Rua Fgueredo Magalhães 6 Rua Santa Clara 6 Rua Santa Clara 7- Rua Constante Ramos 7- Rua Constante Ramos 8 Rua Bolvar 8 Rua Bolvar 9 Mguel Lemos 9 Mguel Lemos 10 Rua Sá Ferrera Localzação (m) Exo da Interseção Ponto de parada fluxo e contrafluxo Tempo de parada no Ponto Fluxo (s) Contraflux o (s) Fgura Bmodal novo espaçamento entre pontos de parada. 146

164 Fgura Bmodal novo espaçamento entre pontos de parada. Fgura Resultados Bmodal novo espaçamento entre pontos de parada. A analse de nterseção solada não fo possível, devdo à falta dos dados de volume por movmento. A CET-RIO, forneceu as característcas geométrcas e operaconas de cada nterseção, porém não possuíam os dados de volume por movmento. Tentou-se estmar o volume de veículos através das câmeras presentes no corredor, porem não fo possível devdo à falta de manutenção e a quantdade de câmeras presentes nas nterseções do corredor. Assm, para mostrar o funconamento do modulo de analse de nterseção solada, adotou-se o segunte exemplo abaxo: 147
165 Fgura Exemplo nterseção solada característcas físcas e operaconas. Fgura Exemplo nterseção solada pontos de conflto. Com as nformações apresentadas na fgura 6.15, alocaram-se os movmentos nos grupos focas e estabeleceu duas fases para nterseção, sendo a fase I com dos estágos (Ia e Ib) (Anexo IV). Em seguda, determnaram-se os possíves pontos de conflto (Fgura 6.16) e, conseqüentemente, as dstâncas de ultrapassar e atngr os pontos de conflto. Calculou-se o tempo de entreverdes, atrbuu-se uma probabldade de não haver sobrecarga de 0,90 e adotou-se, como cclo ncal, um cclo de 70 segundos. Para este cclo calculou-se o tempo de verde de cada grupo focal. Verfcou-se que o cclo arbtrado era maor do que o cclo resultante, 68 segundos, arbtrou-se um novo cclo de 60 segundos. Para o cclo de 60 segundos o resultante fo gual ao arbtrado. Com sso, montou-se o plano semafórco. O anexo IV apresenta as telas capturadas do programa COORBUS, com cada etapa do processo. 148
166 6.2. Consderações fnas A determnação da faxa de onda verde para o transporte ndvdual e coletvo é muto mas factível em relação à coordenação bmodal, vsto que a superposção de dagramas não garante a obtenção da faxa de onda verde para ambos os modos. E em mutos casos são necessáros ajustes, tas como: reposconamento e redução ou aumento do tempo perddo nos pontos de parada. A obtenção dos dados de volume por movmento, em cada nterseção, fo a maor dfculdade para a aplcação prátca do software, vsto que, na maora dos casos, estes dados são levantados manualmente e envolvem uma quantdade sgnfcatva de pesqusadores para coletar, em campo, as nformações necessáras para modelagem. Assm, a aplcação da metodologa, mostrou que o software precsa ter a capacdade de ler os dados de volume, por movmento, de algum contador de tráfego eletrônco. Uma sugestão, para automatzar o processo, sera a mplementação de dentfcação de veículos e classfcação por reconhecmento de vídeo. O ensao feo para uma contagem por câmeras, sem-automátca, nesta pesqusa pode ser o camnho para este desenvolvmento. 149
167 CAPÍTULO 7 - CONCLUSÕES E RECOMENDAÇÕES 150
168 Na revsão bblográfca abortaram-se os prncpas softwares de coordenação semafórca off-lne exstentes. A maora dos softwares prorzam o transporte ndvdual, sendo o Transyt e o KOORD, os dos úncos, que possuem meddas de prordade para o transporte coletvo por ônbus. A falta de acesso às versões completas de alguns dos aplcatvos analsados, dfcultou a obtenção de nformações mas detalhadas dos métodos matemátcos, das técncas de otmzação empregadas e dos lmtes de processamento, pos as versões demo não permtam a nclusão de dados ou mesmo a alteração dos exemplos exstentes. As característcas menconadas são orundas dos manuas e help (ajuda) dos aplcatvos e pesqusas realzadas por outros autores. A aplcação desses softwares fechados e desenvolvdos para outras condções de tráfego, na sua grande maora, requerem ajustes e calbrações para reproduzr a stuação da local em estudo, e em alguns casos, exgem equpamentos e recursos não dsponíves. A função heurístca, adotada pelos softwares, o relaconamento e comportamento das varáves envolvdas são de fundamental mportânca, pos podem gerar uma tendênca a soluções ótmas, que na realdade podem ser runs ou nefcazes operaconalmente, como ex: o que a TTI constatou no PASSER II. Vale salentar, que a maora dos aplcatvos dsponíves, orgnaram-se de pesqusas em unversdades e o processo de aperfeçoamento contínuo prossegue graças ao acúmulo, permanente, de novos conhecmentos e grupos de pesqusa. Hoje, dependendo da complexdade do problema, a busca exaustva está mas vável de ser adotada, devdo a maor capacdade de memóra e processamento dos computadores pessoas. O software KOORD, desenvolvdo por Porto, em 1982, servu de base para desenvolvmento do COORBUS, entretanto foram realzados alguns ajustes na mplementação, pos o KOORD não apresentava alguns recursos da metodologa desenvolvda por Porto em 1982, entre eles: a possbldade de não haver coordenação bmodal, o cálculo das defasagens não contnha o desconto do tempo de nérca e a transferênca do exo para lnha de retenção e as faxas de onda verde mínmas, tanto para o transporte coletvo quando para o ndvdual, não eram respetas e não representavam crtéros de parada para o programa. A metodologa, em alguns casos, não consegue determnar, matematcamente, a faxa de onda verde para ambos os modas. Uma futura melhora na metodologa de coordenação sera o aumento do tempo de verde, do grupo focal do sentdo prncpal, na nterseção que prejudca a obtenção da faxa de onda verde, pos se sabe em qual nterseção ocorreu a maor penetração do tempo de vermelho na faxa de onda verde. A possbldade de aumentar o tempo de verde desta nterseção, em gual valor da penetração, somente será possível se não comprometer as demas aproxmações da 151
169 nterseção. Outra solução sera alterar as condções de nexstênca de faxa de onda verde, onde as varáves de controle, faxas de onda verde mínma para o transporte ndvdual e coletvo, passaram a sugerr quas nterseções precsaram ser analsadas para se obter o mínmo de faxa de onda verde ou dentfcar os pontos de quebra da coordenação, logo seram gerados dos trechos de onda verde. A coordenação para ambos os modos de transporte, ndvdual e coletvo, pode ser vablzada ou torna-se mas efcente com apoo de snalzações adconas e ntervenções geométrcas váras e operaconas de tráfego. O tempo de parada e a relação dstânca/quantdade por trecho de pontos de parada são fatores determnantes no processo de calculo da coordenação para o transporte coletvo, pos podem ocorrer casos onde a ampltude da faxa de onda verde é pequena (cnco ou dez segundos), que não será sufcente para satsfazer ao tráfego de transporte coletvo. Caso não seja possível a coordenação para ambos os modos, deve-se adotar uma nova dsposção dos pontos de parada de ônbus ou, se possível, um novo cclo ou novos valores para os tempos de permanênca nos pontos de parada. O COORBUS, como todos os programas de computador, necesstam de aperfeçoamento contnuo, sempre buscando ncorporar processos e metodologas que procuram automatzar processos, melhorar a utlzação do programa, tragam novos ndcadores de desempenho e novas saídas e entradas de nformações. A segur são apresentados alguns assuntos e melhoras necessáras no programa e na metodologa: A maor dfculdade, para o calculo do cclo semafórco, são os dados de volume por movmento, uma solução sera a ntegração do COORBUS com alguma tecnologa de detecção de veículos. Talvez, a ntegração com sstemas de detecção de veículos por câmeras de vídeo (crcuto fechado de tv - CFTV), seja uma solução mas econômca e vável, pos a maora das cdades brasleras estão adotando câmeras para montorar as condções de tráfego dos prncpas corredores de transporte. Na atual versão, a análse de nterseção solada é executada separadamente da coordenação semafórca, ou seja, os resultados dos tempos semafórcos não são ntegrados automatcamente com a coordenação, sendo dgtados novamente. Sugere-se para novas versões a ntegração total do sstema, bem como dos ndcadores de desempenho. Comparar, com exemplos prátcos, os softwares, prncpalmente Transyt e Synchro, com o COORBUS. 152
170 REFERÊNCIAS BIBLIOGRÁFICAS 153
171 , Inventng hstory: Garrett Morgan and the traffc sgnal, (Encontrado em acessado em Novembro de 2004). AKÇELIK, R.,1993, Traffc Sgnals: Capacty and Tmng Analyss. Research Report ARRB 123. Australan Road Research Board Ltd. Austrála. ALBECK, J.; GERKEN, J, 2004,Traffc Sgnal Tmng and Coordnaton Manual, Department of Transportaton, Mnnesota, EUA. ALMEIDA, A. D. JR., 2000, Análse e Dmensonamento de Lnhas de Ônbus Urbano, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. ANSELMO, F. A. F., 1997, Desvendando o Camnho das Pedras, (Encontrado em acessado em Janero de 2005). BARBOSA, M., 2003, Tutoral de Utlzação de Opengl, Projeto Orentado de Computação II, Curso de Cêncas da Computação, Centro Unverstáro de Belo Horzonte, UNI-BH, MG, Brasl. BARRA, I. N., 1999, Análse das Prordades para Altas Porcentagens de Ônbus nos Planos de Sncronsmo, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. BATISTA, R. A., 2003, Sstemas Montoradores de Velocdade de Automóves, In: Semnáros de Engenhara Elétrca, Unversdade Federal do Paraná, Curtba, PR, Brasl. BELLIS, M., 2004, Garrett Morgan : Gas Mask and Traffc Sgnal, (Encontrado em acessado em Mao de 2004). BRASIL, 1997, Códgo de Trânsto Braslero, Mnstéro da Justça, Brasíla, DF, Brasl. BULLOCK, D., URBANIK, T., 1999, Traffc Sgnal Systems Addressng Dverse Technologes and Complex User Needs, In: A3A18: Commttee on Traffc Sgnal Systems, Purdue Unversty and Texas A&M Unversty. CARVALHO, R. D. & SIQUEIRA, J. L. N., 2000, Smulação de um Sstema Reatvo e Centralzado de Coordenação de Snas de Tráfego Utlzando a Programação em Lógca com Restrções, In: Anas da IV Semana de Pós-Graduação da UFMG, pp., Belo Horzonte, Agosto. CARVALHO, W. V., 2005a, Algortmos Genétcos e Smulated Annealng, (Encontrado no ste acessado em Janero de 2005). CARVALHO, W. V., 2005b, Tutoral onlne de A* e Hll-Clmbng, (Encontrado no ste acessado em Janero de 2005). 154
172 CASQUERO, F. M. P., 1996, Software PSPV Programação Semafórca para Pedestres e Veículos, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. CHADA, S & NEWLAND, R., 2002, Effectveness of Bus Sgnal Prorty Fnal Report, Natonal Center for Transt Research, College of Engneerng, Unversty of South Florda, USA. CHANG, E.C.P., AND C.J. MESSER, 1991, Arteral Sgnal Tmng Optmzaton Usng Passer II-90. Program Users Manual, Research Report 467-2F, Texas Transportaton Insttute, Texas A&M Unversty, College Staton, Texas, June. CHAUDHARY, N., 2003, PASSER V -03 User Gude, Texas Transportaton Insttute, Texas A&M Unversty, EUA. CNT, 2002, Avalação da Operação dos Corredores de Transporte Urbano por Ônbus no Brasl, Pesqusa da Seção de Passageros CNT 2002 Relatóro Analítco, Confederação Naconal do Transporte (CNT), Brasíla, DF, Brasl. COURAGE, K.G.; WALLACE, C.E. & HADI, M.A. 1991, TRANSYT-7F Users Gude. U.S. Department of Transportaton, Washngton, D.C., December. D AGOSTO, M. A., 1999, Avalação do Desempenho Operaconal de Sstemas de Transportes Urbanos em Vas Segregadas, Dssertação de Mestrado, Insttuto Mltar de Engenhara, Ro de Janero, RJ, Brasl. DALTON, E. J., 1994a, Modelo Computaconal para Smulação Mcroscópca do Tráfego Vecular em Interseções Semaforzadas, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. DALTON, E., 1994b, Aspectos a Serem Contemplados pelos Novos Modelos Computaconas para Interseções Semaforzadas, In: Anas do VIII Congresso Panamercano de Engenhara de Trânsto e Transporte, pp , Méxco, Julho. DAVOL, A. P., 2001, Modelng of Traffc Sgnal Control and Transt Sgnal Prorty Strateges n a Mcroscopc Smulaton Laboratory, Master of Scence n Transportaton, Massachusetts Insttute of Technology, EUA. DELGADO, K. V., 2003, Sstema de Planejamento Progressvo com Heurístca, Cênca da Computação, Insttuto de Matemátca e Estatístca, Unversdade de São Paulo, SP, Brasl. DENATRAN, 1984, Manual de Semáforos, DENATRAN, Brasíla, DF, Brasl. DIEKMANN, J. J., 2000, A Modelng Approach for Evaluatng Network Impacts of Operatonal-level Transportaton Projects, Master of Scence n Cvl and Envronmental Engneerng, Faculty of Vrgna Polytechnc Insttute and State Unversty, Blacksburg, Vrgna, EUA. 155
173 EBTU, 1982, Estudo de Padronzação do Ônbus Urbano, Relatóro Fnal, MT- GEIPOT-EBTU, Brasíla, DF, Brasl. EBTU, 1988, Gerênca do Sstema de Transporte Públco de Passageros STPP : Planejamento da Operação, EBTU, Brasíla, DF, Brasl. EGHTEDARI, P.E. Al G., 2001, Measurng the Benefts of an Adaptve Sgnal - Case Study: RT-TRACS on Mll Plan Blvd. Vancouver, WA., Ph.D. of Systems Scence n Cvl Engneerng, Portland State Unversty, May, EUA ENGELBRECHT, R. J., 1997, Coordnatng Damond Interchange and Arteral Street Sgnal Control, Master of Scence Cvl Engneerng, Texas A&M Unversty, December, EUA. ESTEVES, L. M. B., 1982, Um modelo de Smulação da Operação de Ônbus em Faxas Exclusvas, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. FEHON, K.; CHONG, R.; BLACK, J., 2003, Adaptve Traffc Sgnal System for Cupertno Calforna, In: 16th Annual Meetng of ICTPA, 4th Asa-Pacfc Transportaton Development Conference, Oakland, Oakland, CA. FHWA, 1995, Improvng Traffc Sgnal Operatons, Federal Hghway Admnstraton, U.S. Department of Transportaton, Washngton, DC, USA. FHWA, 1996, Traffc Control Systems Handbook. Federal Hghway Admnstraton, Report, U.S. Department of Transportaton, Washngton, DC, EUA. FREEMAN, W.J., HO, K.Y., MCCHESNEY, E.A., 2002,. An Evaluaton of Sgnalzed Intersecton System Analyss Technques, (encontrado em acessado em janero de 2003). FREITAS, L. H. W., 1985, Análse e Dmensonamento da Oferta de Transporte por Ônbus Metodologa, Boletm técnco da CET n 35, Companha de Engenhara de Trafego, São Paulo, SP, Brasl. GLUCK, J., LEVINSON, H. S. & STOVER, V., 1999, NHCRP - Report Impacts of Access Management Technques, Natonal Cooperatve Hghway Research Program, Transportaton Research Board, Washngton, D.C. GONÇALVES, A. F. M., 1996, Smulação da Operação de Sstemas de Veículos Leves sobre Trlhos, Tese de Doutorado, COPPE/UFRJ, Ro de Janero, Rj, Brasl. GONDIM, M. F., Transporte não Motorzado na Legslação Urbana no Brasl, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. GREENSHIELDS B.D., Shapro, D. and Ercksen E. L. 1947, Traffc Performance at Urban Street Intersectons, Techncal Report no.1, Yale Bureau of Hghway Traffc, New Haven CT, EUA. 156
174 HALE, D. K., 2005, Traffc Network Study Tool TRANSYT-7F, Unted Staton Verson, McTrans Center, Unversty Florda, EUA. HCM, 2000, Hghway Capacty Manual Sgnalzed Intersectons, Bureau of Publc Road, Washngton D.C. EUA. HICKS,B.; CARTER, M., 2003, What Have We Learned About Its? Arteral Management, Federal Hghway Admnstraton, U.S. Department of Transportaton, Washngton, DC, EUA. HOOK, D. E ALBERS, A. Comparson of Alternatve Methodologes to Determne Breakponts n Sgnal Progresson, Annual Meetng ITE, USA, (encontrado em acessado em março de 2002). HVCEO, 2004, Traffc Sgnal Coordnaton Handbook, Housatonc Valley Councl of Elected Offcals, EUA, (Encontrado em acessado em Novembro de 2004). IPEA/ANTP, 1998, Deseconomas do Transporte Urbano. Estudo, Brasíla. JACOBS, J. Q., 1999, Delph Developers Gude to OpenGL, Edtora Wordware Publshng, Inc. KAMARAJUGADDA, A.; PARK, B. B., 2003, Stochastc Traffc Sgnal Tmng Optmzaton, Center for Transportaton Studes, Unversty of Vrgna, EUA. KRAMMES, R.A.; ULLMAN, G. L; DRESSER, G.B.; DAVIS, N.R., 1988, Applcaton of Analyss Tools to Evaluate the Travel Impacts of Hghway Reconstructon wth Emphass on Mcrocomputer Applcatons, Fnal Report, Texas Transportaton Insttute, The Texas A&M Unversty System College Staton, Document s avalable to the U.S. publc through the Natonal Techncal Informaton Servce, Sprngfeld, Vrgna, EUA. LITTLE, J. D. C., 1966, The Synchronzaton of Traffc Sgnals by Mxed Integer-Lnearprogrammng, In: Operatons Research, Vol. 14, p , July. LUNA, M. S. Sobre O Fluxo de Saturação: Concetuação, Aplcação, Determnação e Varação, Tese de mestrado, PETRAN/UFC, Ceará, LUSTOSA, B. J. O Controle de Tráfego em Áreas Urbanas; os Planos de Snalzação. Tese de mestrado, COPPE/UFRJ, Ro de Janero, MÄCKE, P.A.; KORTE E LEUTZBACH, 1956, De Lestungsfähgket von Verkehrsanlagen des motorserten städtschen Strassenverkehrs, Forschungsberchte des Wrtschafts- und Verkehrsmnsterums, NRW Nr.293 Westdeutscher Verlag Köln-Opladen. 157
175 MANSSOUR, I. H., 2001, Introdução à OpenGL, tutoral no ste Pontfíca Unversdade Católca do Ro Grande do Sul, Brasl. MASON, W.; SHREINER, D.; ANGEL, ED., 1999, An Interactve Introducton to OpenGL Programmng, SIGGRAPH; Los Angeles, EUA. MELO, M. J. V. S., 1996, Sstema de Ônbus nas Áreas Urbanas, Superntendênca do Desenvolvmento do Nordeste, Mnstéro do Interor, Recfe, PB, Brasl. MORGAN, G. A., 2004, The Traffc Lght, (Encontrado em /bh/2001/165_gmorgan.htm acessado em Abrl de 2004). MUELLER, E. A., 1970, Aspects of the Hstory of Traffc Sgnals, IEEE Transactons on Vehcular Technology, vol. VT-19, no. 1. NCHRP, 1997, Capacty Analyss of Traffc-actuated Intersectons, NCHRP Project 3-48, Fnal Report, Unversty of Florda, EUA. (Encontrado em acessado em Janero de 2002). NTU, 2002, Prordade para o Transporte Coletvo Urbano, Relatóro Técnco, SEDU/PR e NTU - Assocação Naconal das Empresas de Transportes Urbanos, Brasíla, DF, Brasl. NTU, 1998, Transporte Públco Urbano - Crse e Oportundades. In: publcacoes/publcacoes/pag_7.htm OLIVEIRA, M. G. S; Rbero, P. C. M., 2001, Producton and Analyss of Coordnaton Plans usng a Geographc Informaton System, In: Transportaton Research, Part C, v. 9, n. 1, p , USA. OLIVEIRA, M.G.S.; RIBEIRO, P. C. M., 1997, Aplcação de Sstemas de Informação Geográfcas em Coordenação Semafórca, In: Transporte em Transformação II, p96-109,brasl. PAPAGEORGIOU, M.; DIAKAKI, C.; DINOPOULOU, V.; KOTSIALOS, A.; WANG, Y., 2003, Revew of Road Traffc Control Strateges, In: PROCEEDINGS OF THE IEEE, VOL. 91, N. 12, DECEMBER. PEARSON, R., 2001a, Traffc Sgnal Control, Path ITS, Berkeley, EUA. PEARSON, R., 2001b, Traffc Sgnals Report, ITS Decson, (Encontrado em ort.html, acessado em Janero de 2003). PILLAI, R. S.; RATHI, A. K., 1995, MAXBAND Verson 3.1: Heurstc and optmal Approach for Settng the Left Turn Phase Sequences n Sgnalzed Networks, Center of Transportaton Analyss, Oak Rdge Naconal Laboratory, Oak Rdge, USA. 158
176 PORTO JR., W., 1982, Verfahren zur Koordnerung der festzetgesteuerten Lchtsgnalanlagen unter Berückschtgung des ÖPNV - Strassenbahn oder Omnbus, Fotodrück J. Manz - RWTH Aachen, Alemanha. PORTO JR., W., 1994, Crtéro de Decsão para a Snalzação Prortára para o Transporte Coletvo, In: Anas do III Congresso Pan-amercano de Engenhara de Tráfego e de Transportes, pp , São Paulo, Setembro. PORTO JR., W., 1997, Interseções com Controle Semafórco Apostla, Departamento de Engenhara de Transportes, COPPE/UFRJ, Ro de Janero, RJ, Brasl. PORTO, D. R. M., 2001, Transporte Coletvo na Gestão da Mobldade: o caso do Shoppng Center Ro Sul, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. REIS, L. P, 1999, Notas de aula do Curso de Intelgênca Artfcal, CEREM - Centro de Recursos Multmedátcos, Unversdade Fernando Pessoa, Porto, Portugal. RICH, Elane e Knght, Kevn. Intelgênca artfcal - 2a.Edção: Edtora: McGRAW HILL, RLSA, 1998, Rchtlnen für Lchtsgnalanlagen Lchtzechenanlagen für den Strassenverkehr. Forschungsgesellschaft für Strassen- und Verkehrswesen (Hrsg), No 321, Colôna, Alemanha. ROBERTSON, D. I., 1969, TRANSYT: A Traffc Network Study Tool. Road Research Laboratory Report LR 253, Crowthorne, England,. RUSSELL, S. J. & NORVIG, P., Artfcal Intellgence a Modern Approach, Englewood Clffs, NJ; Prentce Hall, SANTANA, C. H. de, 2002, Introdução à Intelgênca Artfcal - Apostla, Curso de Informátca, Fundação Faculdade de Flosofa, Cêncas e Letras de Mandaguar FAFIMAN, Paraná - Brasl SANTOS, B. J. R. dos, 2003, A Qualdade no Servço de Transporte Públco Urbano, In: I Jornada Centífca de Engenhara, Unversdade Católca de Goás, GO, Brasl. SESSIONS, G., 1971, Traffc Devces: Hstorcal Aspects Thereof, Insttute of Traffc Engneers, Washngton DC, EUA. SHEN, L. D.; ELBADRAWI, H.; ZHAO, F.; OSPINA, D., 1998, At-Grade Busway Plannng Gude, Lehman Center for Transportaton Research, College of Engneerng and Desgn Florda Internatonal Unversty, The State Unversty of Florda at Mam, Mam, EUA. SIGNALFAN.COM, 2004, Hstorcal Sgnals, Sgnalfan.com Dedcated to the Preservaton of Hstorcal Traffc Control Devces, (Encontrado em acessado em mao 2004). 159
177 SILVA, P. C. M., 1992, Contrbução Metodológca à Smulação do Tráfego Urbano: uma adaptação do modelo TRANSYT/8, Tese de Mestrado, COPPE/UFRJ, Ro de Janero, Brasl. SKSZEK, S. L., 2001, State-of-the-Art Report on Non-Tradtonal Traffc Countng Methods, FINAL REPORT 503, Arzona Department of Transportaton n cooperaton wth U.S. Department of Transportaton, Phoenx, Arzona, EUA, OCTOBER. SPILLMAN, R., 1993, Genetc Algorthms, In: Dr. Dobbs Journal, February, pp STOVER, V. G., 1996, SIGNALIZED INTERSECTION SPACING, Transportaton Research Insttute Oregon State Unversty Corvalls, Oregon, October SYNCHRO User s Gude, Traffc ware TARKO, A. P. e M. TRACZ, 2000, Uncertanty n Saturaton Flow Predcton. Transportaton Research Crcular. Fourth Internatonal Symposum on Hghway Capacty. Transportaton Research Bureau. Mau, Hawa. TAVARES, J. A. dos R., 2000, Geração de Confgurações de Sstemas Industras com o Recurso à Tecnologa das Restrções e Computação Evoluconára, Tese de Doutorado em Informátca, Unversdade do Mnho, Portugal, pp TIAN, Z., 2002, Capacty Analyss of Traffc-Actuated Intersectons, Master of Scence n Transportaton, Massachusetts Insttute of Technology, EUA. TRANSMILENIO, 2004, TransMleno Orgulho Captal, (Encontrado em acessado em Novembro de 2004). TRB, 2003, Transt Yeld to Bus-State of the Practce, TCRP Synthess 49, prepared for Transt Cooperatve Research Program (TCRP), Transportaton Research Board (TRB) and Natonal Research Councl (FTA), Washngton, USA. TRB, 1999, Transt Capacty and Qualty of Servce Manual, TCRP Web Document 6 (Project A-15) Contractor s Fnal Report, prepared for Transt Cooperatve Research Program (TCRP), Transportaton Research Board (TRB) and Natonal Research Councl (FTA), Washngton, USA. TRL, 1999, Results from SCOOT s Commercal Systems, Transport Research Laboratory, London, UK. VILLALOBOS, L. D. C., 1994, Metodologa para o Cálculo de Planos de Operação para Semáforos Isolados Consderando Varações no Fluxos de Tráfego, Dssertação de Mestrado, COPPE/UFRJ, Ro de Janero, RJ, Brasl. VINCENT, R.A, MITCHE, A.I. AND ROBERTSON, D.I., 1980, User Gude to TRANSYT Verson 8. TRRL Report LR888. Transport and Road Research Laboratory. Inglaterra. 160
178 WANGENHEIM, A. V., 2004, Apostla de Computação Gráfca, Departamento de Cêncas da Computação, Unversdade Federal de Santa Catarna UFSC. WEBSTER, F., AND COBBE, B.,, Traffc Sgnals. In: Road Research Techncal Paper No 56. Londres WEBSTER, F. V., Traffc Sgnals. In: Daves, E. (ed.) Traffc Engneerng Practce. E. & F. N. LTD., Londres, VALTAS, C., NOVICKI, G., 2005, Ônbus montados sobre chasss de camnhão. Isso anda exste?, Tecnologa chasss de ônbus, Agosto / Setembro. pp
179 ANEXO I. Equpamentos Intrusvos e Não Intrusvos. 162
180 Tabela. Equpamentos ntrusvos. Fabrcante Produto Tpo de Sensor Dados Coletados Reno Detecton Systems C-1100, E-1100 Seres LI Contagem U.S. Traffc Corporaton IVS , 2001 LI Contagem, Velocdade, Classfcação. Golden Rver TRAFFIC, Ltd. Marksman 360 LI Contagem Electronque Controle Mesure HESTIA LI, PE Contagem, Velocdade, Classfcação, Peso em movmento. Golden Rver TRAFFIC, Ltd. Marksman 660, 660 WIM LI, PE Contagem, Velocdade, Classfcação, Peso em movmento. Pat Amerca Inc. DAW 190 LI, PE, BP Contagem, Velocdade, Classfcação, Peso em ITC (Pat Amerca) Raktel, Tel LI, PE, BP movmento. Contagem, Velocdade, Classfcação, Peso em movmento. TmeMark, Inc. Delta III (L, B), Gamma Classfer P Contagem, Velocdade, Classfcação. Internatonal Road Dynamcs Inc. IRD TCU 1010 P Contagem Golden Rver TRAFFIC, Ltd. Marksman 400/410 P Contagem, Velocdade, Classfcação. MetroContagem (Australa) MetroContagem 5600 Seres P Contagem, Velocdade, Classfcação. JAMAR Technologes, Inc. TRAX Mte, TRAX I P Contagem, Velocdade, Classfcação. Damond Traffc Traffc Tally 2, 4, 6, 21, 41, 77, Sprte P, LI Contagem JAMAR Technologes, Inc. Totalzer P, LI Contagem JAMAR Technologes, Inc. TRAX III P, LI Contagem, Velocdade, Classfcação. Peek Traffc Inc. ADR P, LI, PE Contagem, Velocdade, Classfcação. Peek Traffc Inc. ADR , 3000 Plus P, LI, PE Contagem, Velocdade, Classfcação, Peso em movmento. Internatonal Road Dynamcs Inc. IRD TC/C 540 P, LI, PE Contagem, Velocdade, Classfcação. Mtron Systems Corporaton MSC 3000 P, PE Contagem, Velocdade, Classfcação. Mtron Systems Corporaton MSC 4000 SCOUT P, LI, PE Contagem, Velocdade, Classfcação, Peso em movmento. ITC (Pat Amerca) T.R.S., Mn T.R.S, Traffc ACE P, LI, PE Contagem, Velocdade, Classfcação. Damond Traffc Traffc Tally Pegasus P, LI, PE Contagem Damond Traffc Traffc Tally Phoenx, Uncorn P, LI, PE Contagem, Velocdade, Classfcação. Tpo: LI Laço Indutvo. BP Bendng Plate. PE Pezo-Elétrco. P Pressão ou Pneumátco. 163
181 Tabela. Equpamentos não ntrusvos. Fabrcante Produto Tpo de Sensor Dados Coletados Peek Traffc Inc. SafeContagem IA Contagem, Velocdade, Classfcação. Schwartz Electro-Optcs, Inc. Autosense II, IIA, III IA Contagem, Velocdade, Classfcação. Spectra-Research MLMS Mult-Lane Montorng System IA Contagem, Velocdade, Classfcação. ASIM Technologes, Ltd. DT 270 Seres IA /UP Contagem, Classfcação. ASIM Technologes, Ltd. IR 250 Seres, TT 260 Seres IA /UP/MD Contagem, Velocdade, Classfcação. Internatonal Road Dynamcs Inc. IRD SmartSonc AP Contagem, Velocdade, Classfcação. SmarTek Systems, Inc. SmartTek Model SAS 1 AP Contagem, Velocdade, Classfcação. Eltec Instruments, Inc. Model 833 IP Contagem, Velocdade. EFKON AG TOM 2000 IP Contagem, Velocdade, Classfcação. 3M, Intellgent Transportaton Systems 3M Canoga M Contagem, Velocdade, Classfcação. Nu-Metrcs HI STAR NC-47, NC-30X Contagemcard M Contagem Nu-Metrcs HI STAR NC-97 M Contagem, Velocdade, Classfcação. EIS Electronc Integrated Systems. RTMS Model X1 RA Contagem, Velocdade, Classfcação. Econolte Control Products, Inc. Autoscope 2004, Solo DI Contagem, Velocdade, Classfcação. Boschung Amerca BVS DI Contagem, Velocdade. ATD Northwest PATH CV-98 MK DI Contagem, Classfcação. Computer Recognton Systems, Inc. TAS2 DI Contagem, Velocdade, Classfcação. Nestor Traffc Systems, Inc. Traffc Vson DI Contagem, Velocdade, Classfcação. Trafcon Traffcon VIP/D DI Contagem, Velocdade, Classfcação. Iters Vantage DI Contagem, Velocdade, Classfcação. Peek Traffc Inc. DIeo Track 905, 910 DI Contagem, Velocdade, Classfcação. Tpo: IA Infravermelho Atvo. M Magnétco. UP Ultra-som passvo. IP Infravermelho Passvo. DI Detector por Imagem. MD Mcroondas Doppler AP Acústco Passvo. RA Radar. 164
182 ANEXO II. Fluxograma do Programa COORBUS. 165
183 166
184 167
185 168
186 169
187 170
188 171
189 172
190 173
191 ANEXO III. Bbloteca Gráfca Opengl. 174
192 Prmtvas geométrcas. As prmtvas geométrcas, no OpenGL, são descrtas em termos de seus vértces coordenadas que defnem os pontos, pontos fnas e segmentos de lnhas, ou cantos de polígonos os quas são coordenadas homogêneas (MASON, 1999). Coordenadas homogêneas são da forma ( x, y, z, w ). Dependendo de como os vértces estão organzados, OpenGL pode renderzar e mostrar qualquer prmtva. O OpenGL apresenta apenas dez tpos de prmtvas dstntas, porém com a devda organzação destas prmtvas é possível a cração de estruturas mas complexas (BARBOSA, 2003). Ponto O ponto é representado por um conjunto de números de pontos flutuantes chamados vertex. Todos os cálculos nternos são fetos como se os vértces fossem trdmensonas. Vértces especfcados por um usuáro como bdmensonal (sto é, somente com as coordenadas x e y) têm a coordenada z atrbuída como zero pelo OpenGL. Lnhas Em OpenGL, o termo lnha refere-se a segmento de lnha; não é, portanto, a versão matemátca que estende para o nfnto em ambas as dreções. Exstem formas fáces para especfcar uma sere conecta de segmentos de lnhas, ou uma sére fechada de segmentos. Em todos os casos, portanto, as lnhas que consttuem a sére conectada, são especfcadas nos termos dos seus vértces até seus pontos fnas. Polígonos Polígonos são áreas fechadas por um loop smples de segmentos de lnhas, onde os segmentos de lnhas são especfcados por vértces e seus pontos fnas. Polígonos são tpcamente desenhados com os pxels do seu nteror preenchdos, mas também podem ser desenhados como não preenchdos ou como um conjunto de pontos. (MASON, 1999) Desenhando Prmtvas No OpenGL todos objetos geométrcos são descrtos como um jogo ordenado de vértces. Para tal operação é utlzada a função glvertex*() (MASON, 1999). Uma vez que os vértces estão especfcados, é necessáro dzer ao OpenGL que tpo de prmtva será crada. Para que sto aconteça é necessáro que a especfcação dos vértces estejam entre o par de comandos glbegn() e glend().o parâmetro do comando glbegn() será o tpo da 175
193 prmtva a ser desenhada. O comando glend() marca o fm de uma lsta de dados de vértces. Os tpos possíves para parâmetro são (Tabela 1 e Fgura 1): Tabela 1. A tpos de prmtvas. Valor do parâmetro Sgnfcado GL_POINTS Pontos Indvduas. GL_LINES Pares de vértces nterpretados como segmentos de lnha ndvduas. GL_LINE_STRIP Sére de segmentos de lnha conectados. GL_LINE_LOOP Como o anteror, porém com um segmento adconado entre últmo e prmero vértces. GL_TRIANGLES Trplos vértces nterpretados como trângulos. GL_TRIANGLE_STRIP Faxas de trângulos undas. GL_TRIANGLE_FAN Leque de trângulos undos. GL_QUADS Quádruplo de vértces nterpretados como polígonos de quatro lados. GL_QUAD_STRIP Faxa quadrlateral unda. GL_POLYGON Lmte de um polígono smples, convexo. Fonte: BARBOSA, 2003 Fgura 1. Tpos de prmtvas. 176
; glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.25, 0.75, 0.0); glend(); GL_LINES glbegn(gl_lines); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glend(); GL_LINE_STRIP glbegn(gl_line_strip); glvertex3f (0.")
194 Neste exemplo serão utlzados alguns tpos de prmtvas suportadas pelo OpenGL (Barbosa,2003). GL_POINTS glbegn(gl_points); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.25, 0.75, 0.0); glend(); GL_LINES glbegn(gl_lines); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glend(); GL_LINE_STRIP glbegn(gl_line_strip); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.30, 0.45, 0.0); glend(); GL_LINE_LOOP glbegn(gl_line_loop); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.30, 0.45, 0.0); glend(); 177
; glvertex3f (0.30, 0.45, 0.0); glend(); GL_QUADS glbegn(gl_quads); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.25, 0.75, 0.0); glend(); Cores no OpenGL No OpenGL é possível trabalhar com cores de dos modos dferente : Modo RGBA e Modo de Índce de Cores.")
 é determnado em uma base de vértces para cada prmtva geométrca.")
195 GL_TRIANGLES glbegn(gl_triangles); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.30, 0.45, 0.0); glend(); GL_QUADS glbegn(gl_quads); glvertex3f (0.25, 0.25, 0.0); glvertex3f (0.75, 0.25, 0.0); glvertex3f (0.75, 0.75, 0.0); glvertex3f (0.25, 0.75, 0.0); glend(); Cores no OpenGL No OpenGL é possível trabalhar com cores de dos modos dferente : Modo RGBA e Modo de Índce de Cores. Antes da execução de um programa, o modo de exbção de cores deverá ser defndo. Uma vez que o modo de exbção é ncalzado, não poderá ser modfcado. Como o programa executa uma cor (ou um índce de cores ou um valor de RGBA) é determnado em uma base de vértces para cada prmtva geométrca. Esta cor ou é uma cor especfcada explctamente para um vértce ou, se a lumnação está habltada, é determnada pela nteração das matrzes de transformação com as normas da superfíce e outras propredades dos materas. Para especfcar a cor em um determnado vértce o comando a ser utlzado é o segunte: glcolor*(), onde o * representa o sufxo do número de coordenadas, o tpo de dados e o vetor. (Os parâmetros poderão varar de acordo com a quantdade de coordenadas, e o tpo dos mesmos de acordo com o tpo especfcado no sufxo.). A faxa de valores de cores é representada por valores de ponto flutuante que varam de zero a um (BARBOSA, 2003). 178
196 ANEXO IV. Prncpas Telas do Programa COORBUS. 179


197 Característcas volumétrcas da nterseção. Dstrbução das Fases. 180


198 Dados de volume por dreção de tráfego. Tempo de entreverdes. 181


199 Dados para o cálculo do tempo de verde para o fluxo de veículos. Dados para o cálculo do tempo de verde para o fluxo de pedestre. 182

200 Tempo de verde por grupo focal. Cclo resultante gual a 70 segundos. 183

201 Cclo resultante gual a 60 segundos. Dagrama com os tempos semafórcos. 184


202 Dados ncas da coordenação. Característcas de cada nterseção do corredor. Característcas do corredor. 185
 -")

203 Faxa de onda verde para o Transporte Indvdual (TI) - mão únca. Resultados da coordenação para o TI - mão únca. 186

204 Faxa de onda verde para o Transporte Coletvo (TC) - mão únca. Resultados da coordenação para o TC - mão únca. 187
205 Faxa de onda verde para o TI no fluxo com o TC no contra fluxo. Resultados da coordenação para o TI no fluxo com o TC no contra fluxo. 188


206 Faxa de onda verde para o TI - mão dupla. Resultados da coordenação para o TI - mão dupla. 189
.")
207 Faxa de onda verde para o TC - mão dupla. Faxa de onda verde para o TC - mão dupla (méda tempo de parada). Resultados da coordenação para o TC - mão dupla. 190
.")
208 Faxa de onda verde para o TI e TC - mão dupla (Bmodal). 191

.")
209 Resultados da coordenação para o TI e TC - mão dupla (Bmodal). 192



210 Faxa de onda verde com velocdade varável por trecho. Resultados da coordenação para o TI - mão dupla. 193
211 ANEXO V. Dados das nterseções do estudo de caso. 194

212 01 - Avenda. Atlântca x Rua Prado Júnor Av. Prado Júnor Av. Atlântca 195
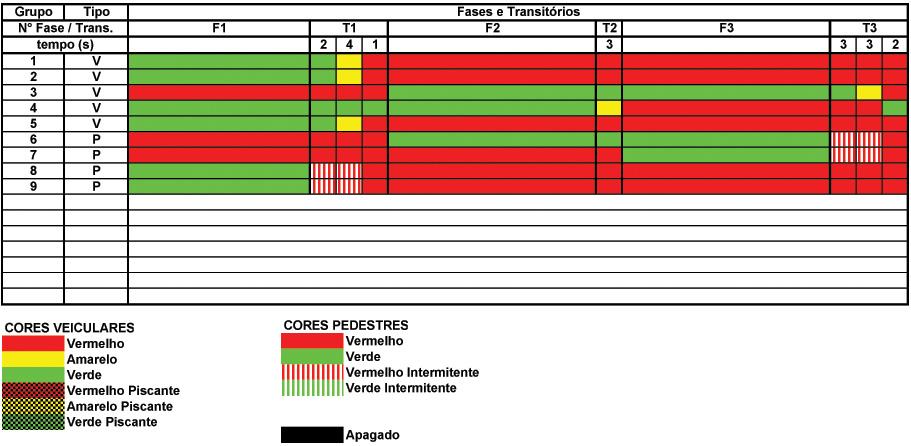
213 196

214 02 - Avenda. Atlântca x Rua Rodolfo Dantas R. Rodolfo Dantas Av. Atlântca 197
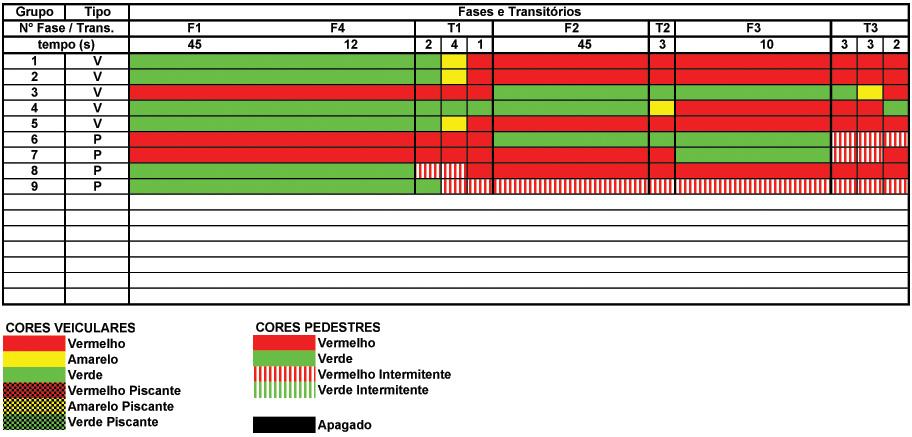
215 198


216 03 - Avenda. Atlântca x Rua Repúblca do Peru 199
217 Av. Republca do Peru Av. Atlântca 3 200
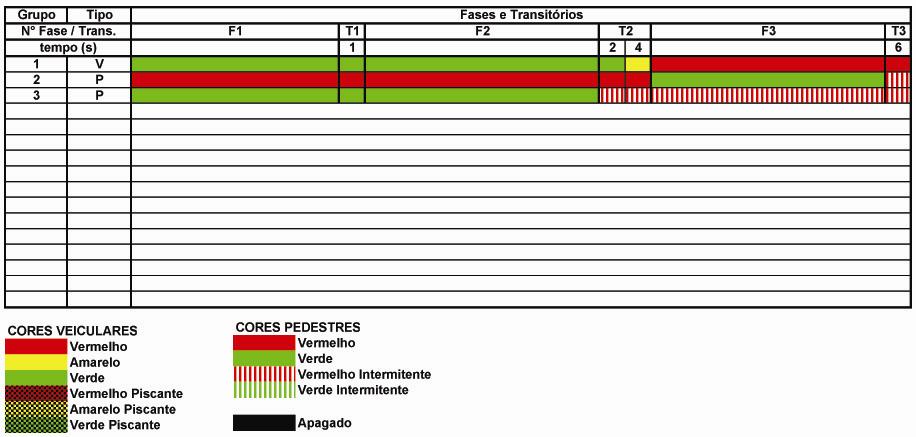
218 201

219 04 - Avenda. Atlântca x Rua. Sguera Campos Rua Squera Campos Av. Atlântca 9 202
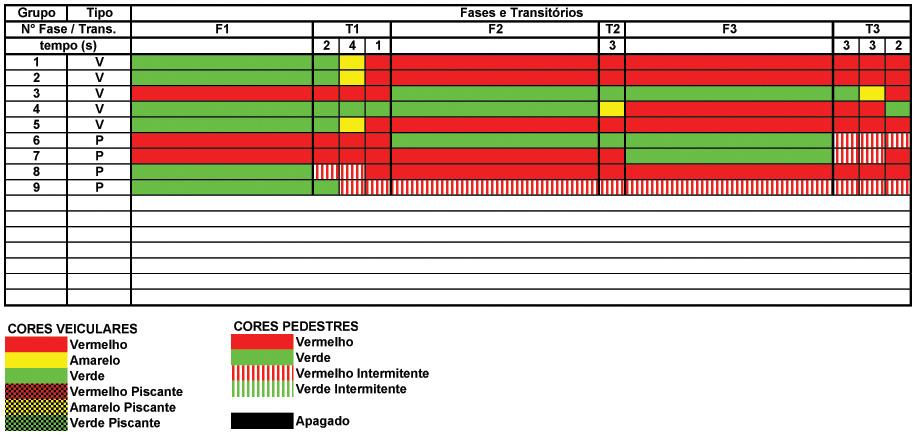
220 203

221 05 - Avenda. Atlântca x Rua Fgueredo Magalhães 204
222 Rua Fgueredo de Magalhães Av. Atlântca 3 205
223 206

224 06 - Avenda. Atlântca x Rua Santa Clara Rua Santa Clara Av. Atlântca 207
225 208

226 07 - Avenda. Atlântca x Rua Constante Ramos R. Constante Ramos Av. Atlântca 209
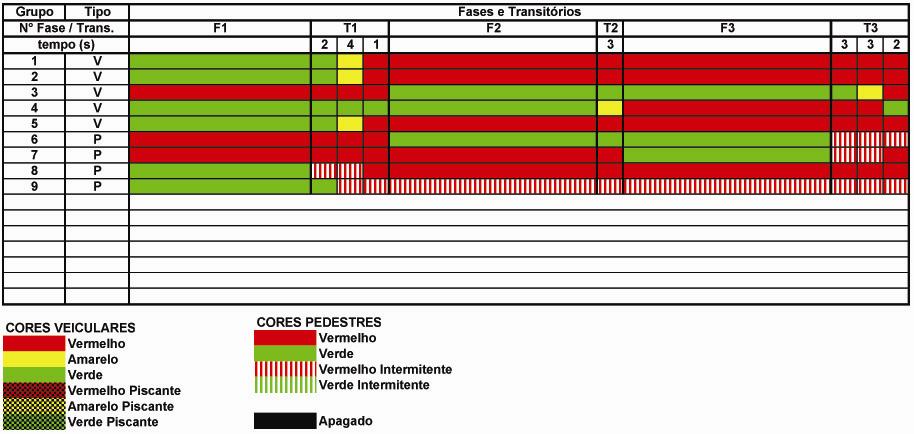
227 210

228 08 - Avenda. Atlântca x Rua Bolívar 211
 9 6 7 4 8 5 2 1 Av.")
229 R. Bolvar Método de Coordenação Semafórca para Corredores de Transporte Coletvo - PET/COPPE/UFRJ (2007) Av. Atlântca 3 212
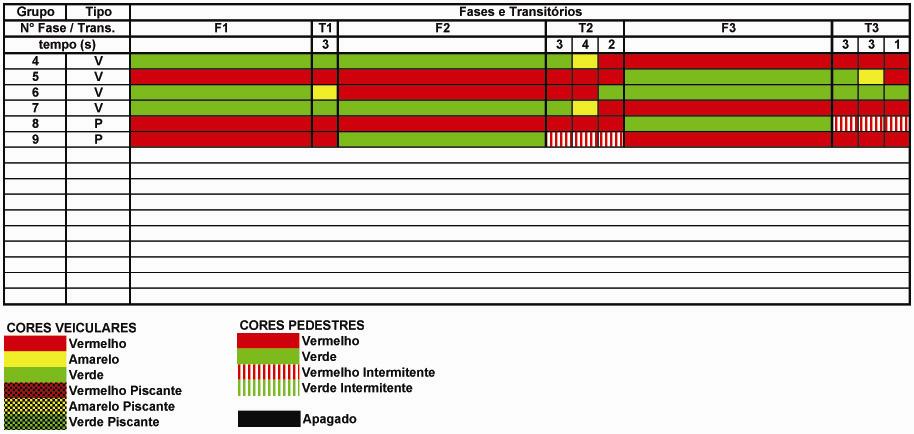
230 213

231 09 - Avenda. Atlântca x Rua Mguel Lemos R. Mguel Lemos Av. Atlântca 214
232 215

233 10 - Avenda. Atlântca x Rua Francsco Sá R. Francsco Sá Av. Atlântca 216
TRANSPORTES. Sessão Prática 11 Dimensionamento de Interseções Semaforizadas
 Mestrado Integrado em Engenhara Cvl TRANSPORTES Prof. Responsável: Lus Pcado Santos Sessão Prátca 11 Dmensonamento de Interseções Semaforzadas Insttuto Superor Técnco / Mestrado Integrado Engenhara Cvl
Mestrado Integrado em Engenhara Cvl TRANSPORTES Prof. Responsável: Lus Pcado Santos Sessão Prátca 11 Dmensonamento de Interseções Semaforzadas Insttuto Superor Técnco / Mestrado Integrado Engenhara Cvl
Mestrado Integrado em Engenharia Civil. Disciplina: TRANSPORTES Prof. Responsável: José Manuel Viegas
 Mestrado Integrado em Engenhara Cvl Dscplna: TRANSPORTES Prof. Responsável: José Manuel Vegas Sessão Prátca 7 (Tpo A): Dmensonamento de ntersecções semaforzadas smples Curso 2008/09 1/22 INTERSECÇÕES Introdução
Mestrado Integrado em Engenhara Cvl Dscplna: TRANSPORTES Prof. Responsável: José Manuel Vegas Sessão Prátca 7 (Tpo A): Dmensonamento de ntersecções semaforzadas smples Curso 2008/09 1/22 INTERSECÇÕES Introdução
EXERCÍCIO: VIA EXPRESSA CONTROLADA
 EXERCÍCIO: VIA EXPRESSA CONTROLADA Engenhara de Tráfego Consdere o segmento de va expressa esquematzado abaxo, que apresenta problemas de congestonamento no pco, e os dados a segur apresentados: Trechos
EXERCÍCIO: VIA EXPRESSA CONTROLADA Engenhara de Tráfego Consdere o segmento de va expressa esquematzado abaxo, que apresenta problemas de congestonamento no pco, e os dados a segur apresentados: Trechos
4 Critérios para Avaliação dos Cenários
 Crtéros para Avalação dos Cenáros É desejável que um modelo de geração de séres sntétcas preserve as prncpas característcas da sére hstórca. Isto quer dzer que a utldade de um modelo pode ser verfcada
Crtéros para Avalação dos Cenáros É desejável que um modelo de geração de séres sntétcas preserve as prncpas característcas da sére hstórca. Isto quer dzer que a utldade de um modelo pode ser verfcada
RAD1507 Estatística Aplicada à Administração I Prof. Dr. Evandro Marcos Saidel Ribeiro
 UNIVERIDADE DE ÃO PAULO FACULDADE DE ECONOMIA, ADMINITRAÇÃO E CONTABILIDADE DE RIBEIRÃO PRETO DEPARTAMENTO DE ADMINITRAÇÃO RAD1507 Estatístca Aplcada à Admnstração I Prof. Dr. Evandro Marcos adel Rbero
UNIVERIDADE DE ÃO PAULO FACULDADE DE ECONOMIA, ADMINITRAÇÃO E CONTABILIDADE DE RIBEIRÃO PRETO DEPARTAMENTO DE ADMINITRAÇÃO RAD1507 Estatístca Aplcada à Admnstração I Prof. Dr. Evandro Marcos adel Rbero
7 - Distribuição de Freqüências
 7 - Dstrbução de Freqüêncas 7.1 Introdução Em mutas áreas há uma grande quantdade de nformações numércas que precsam ser dvulgadas de forma resumda. O método mas comum de resumr estes dados numércos consste
7 - Dstrbução de Freqüêncas 7.1 Introdução Em mutas áreas há uma grande quantdade de nformações numércas que precsam ser dvulgadas de forma resumda. O método mas comum de resumr estes dados numércos consste
Modelos Matemáticos para Otimização do Tráfego Urbano Semaforizado
 Modelos Matemátcos para Otmzação do Tráfego Urbano Semaforzado Marcelo Lacortt, Rosana Mara Luvezute Krpka Unversdade de Passo Fundo - Insttuto de Cêncas Exatas e Geocêncas 99001-970, Passo Fundo, RS E-mal:
Modelos Matemátcos para Otmzação do Tráfego Urbano Semaforzado Marcelo Lacortt, Rosana Mara Luvezute Krpka Unversdade de Passo Fundo - Insttuto de Cêncas Exatas e Geocêncas 99001-970, Passo Fundo, RS E-mal:
4.1 Modelagem dos Resultados Considerando Sazonalização
 30 4 METODOLOGIA 4.1 Modelagem dos Resultados Consderando Sazonalzação A sazonalzação da quantdade de energa assegurada versus a quantdade contratada unforme, em contratos de fornecmento de energa elétrca,
30 4 METODOLOGIA 4.1 Modelagem dos Resultados Consderando Sazonalzação A sazonalzação da quantdade de energa assegurada versus a quantdade contratada unforme, em contratos de fornecmento de energa elétrca,
Aula Características dos sistemas de medição
 Aula - Característcas dos sstemas de medção O comportamento funconal de um sstema de medção é descrto pelas suas característcas (parâmetros) operaconas e metrológcas. Aqu é defnda e analsada uma sére destes
Aula - Característcas dos sstemas de medção O comportamento funconal de um sstema de medção é descrto pelas suas característcas (parâmetros) operaconas e metrológcas. Aqu é defnda e analsada uma sére destes
Estudo quantitativo do processo de tomada de decisão de um projeto de melhoria da qualidade de ensino de graduação.
 Estudo quanttatvo do processo de tomada de decsão de um projeto de melhora da qualdade de ensno de graduação. Rogéro de Melo Costa Pnto 1, Rafael Aparecdo Pres Espíndula 2, Arlndo José de Souza Júnor 1,
Estudo quanttatvo do processo de tomada de decsão de um projeto de melhora da qualdade de ensno de graduação. Rogéro de Melo Costa Pnto 1, Rafael Aparecdo Pres Espíndula 2, Arlndo José de Souza Júnor 1,
3 Elementos de modelagem para o problema de controle de potência
 3 Elementos de modelagem para o problema de controle de potênca Neste trabalho assume-se que a rede de comuncações é composta por uma coleção de enlaces consttuídos por um par de undades-rádo ndvdualmente
3 Elementos de modelagem para o problema de controle de potênca Neste trabalho assume-se que a rede de comuncações é composta por uma coleção de enlaces consttuídos por um par de undades-rádo ndvdualmente
Introdução às Medidas em Física a Aula
 Introdução às Meddas em Físca 4300152 8 a Aula Objetvos: Experênca Curvas Característcas Meddas de grandezas elétrcas: Estudar curvas característcas de elementos resstvos Utlzação de um multímetro Influênca
Introdução às Meddas em Físca 4300152 8 a Aula Objetvos: Experênca Curvas Característcas Meddas de grandezas elétrcas: Estudar curvas característcas de elementos resstvos Utlzação de um multímetro Influênca
3 Metodologia de Avaliação da Relação entre o Custo Operacional e o Preço do Óleo
 3 Metodologa de Avalação da Relação entre o Custo Operaconal e o Preço do Óleo Este capítulo tem como objetvo apresentar a metodologa que será empregada nesta pesqusa para avalar a dependênca entre duas
3 Metodologa de Avalação da Relação entre o Custo Operaconal e o Preço do Óleo Este capítulo tem como objetvo apresentar a metodologa que será empregada nesta pesqusa para avalar a dependênca entre duas
Prioridades com Teste de Escalonabilidade
 rordades + Teste de Escalonabldade Sstemas de Tempo Real: rordades com Teste de Escalonabldade Rômulo Slva de Olvera Departamento de Automação e Sstemas DAS UFSC Cada tarefa recebe uma prordade Escalonamento
rordades + Teste de Escalonabldade Sstemas de Tempo Real: rordades com Teste de Escalonabldade Rômulo Slva de Olvera Departamento de Automação e Sstemas DAS UFSC Cada tarefa recebe uma prordade Escalonamento
Experiência V (aulas 08 e 09) Curvas características
 Curvas características") Experênca (aulas 08 e 09) Curvas característcas 1. Objetvos 2. Introdução 3. Procedmento expermental 4. Análse de dados 5. Referêncas 1. Objetvos Como no expermento anteror, remos estudar a adequação de
Experênca (aulas 08 e 09) Curvas característcas 1. Objetvos 2. Introdução 3. Procedmento expermental 4. Análse de dados 5. Referêncas 1. Objetvos Como no expermento anteror, remos estudar a adequação de
5 Relação entre Análise Limite e Programação Linear 5.1. Modelo Matemático para Análise Limite
 5 Relação entre Análse Lmte e Programação Lnear 5.. Modelo Matemátco para Análse Lmte Como fo explcado anterormente, a análse lmte oferece a facldade para o cálculo da carga de ruptura pelo fato de utlzar
5 Relação entre Análse Lmte e Programação Lnear 5.. Modelo Matemátco para Análse Lmte Como fo explcado anterormente, a análse lmte oferece a facldade para o cálculo da carga de ruptura pelo fato de utlzar
3 Algoritmos propostos
 Algortmos propostos 3 Algortmos propostos Nesse trabalho foram desenvolvdos dos algortmos que permtem classfcar documentos em categoras de forma automátca, com trenamento feto por usuáros Tas algortmos
Algortmos propostos 3 Algortmos propostos Nesse trabalho foram desenvolvdos dos algortmos que permtem classfcar documentos em categoras de forma automátca, com trenamento feto por usuáros Tas algortmos
Introdução aos Problemas de Roteirização e Programação de Veículos
 Introdução aos Problemas de Roterzação e Programação de Veículos PNV-2450 André Bergsten Mendes Problema de Programação de Veículos Problema de Programação de Veículos Premssas Os roteros ncam e termnam
Introdução aos Problemas de Roterzação e Programação de Veículos PNV-2450 André Bergsten Mendes Problema de Programação de Veículos Problema de Programação de Veículos Premssas Os roteros ncam e termnam
3 A técnica de computação intensiva Bootstrap
 A técnca de computação ntensva ootstrap O termo ootstrap tem orgem na expressão de língua nglesa lft oneself by pullng hs/her bootstrap, ou seja, alguém levantar-se puxando seu própro cadarço de bota.
A técnca de computação ntensva ootstrap O termo ootstrap tem orgem na expressão de língua nglesa lft oneself by pullng hs/her bootstrap, ou seja, alguém levantar-se puxando seu própro cadarço de bota.
2 Incerteza de medição
 2 Incerteza de medção Toda medção envolve ensaos, ajustes, condconamentos e a observação de ndcações em um nstrumento. Este conhecmento é utlzado para obter o valor de uma grandeza (mensurando) a partr
2 Incerteza de medção Toda medção envolve ensaos, ajustes, condconamentos e a observação de ndcações em um nstrumento. Este conhecmento é utlzado para obter o valor de uma grandeza (mensurando) a partr
Figura 8.1: Distribuição uniforme de pontos em uma malha uni-dimensional. A notação empregada neste capítulo para avaliação da derivada de uma
 Capítulo 8 Dferencação Numérca Quase todos os métodos numércos utlzados atualmente para obtenção de soluções de equações erencas ordnáras e parcas utlzam algum tpo de aproxmação para as dervadas contínuas
Capítulo 8 Dferencação Numérca Quase todos os métodos numércos utlzados atualmente para obtenção de soluções de equações erencas ordnáras e parcas utlzam algum tpo de aproxmação para as dervadas contínuas
METODOLOGIA PARA O CÁLCULO DE VAZÃO DE UMA SEÇÃO TRANSVERSAL A UM CANAL FLUVIAL. Iran Carlos Stalliviere Corrêa RESUMO
 Semnáro Anual de Pesqusas Geodéscas na UFRGS, 2. 2007. UFRGS METODOLOGIA PARA O CÁLCULO DE VAZÃO DE UMA SEÇÃO TRANSVERSAL A UM CANAL FLUVIAL Iran Carlos Stallvere Corrêa Insttuto de Geocêncas UFRGS Departamento
Semnáro Anual de Pesqusas Geodéscas na UFRGS, 2. 2007. UFRGS METODOLOGIA PARA O CÁLCULO DE VAZÃO DE UMA SEÇÃO TRANSVERSAL A UM CANAL FLUVIAL Iran Carlos Stallvere Corrêa Insttuto de Geocêncas UFRGS Departamento
RISCO. Investimento inicial $ $ Taxa de retorno anual Pessimista 13% 7% Mais provável 15% 15% Otimista 17% 23% Faixa 4% 16%
 Análse de Rsco 1 RISCO Rsco possbldade de perda. Quanto maor a possbldade, maor o rsco. Exemplo: Empresa X va receber $ 1.000 de uros em 30 das com títulos do governo. A empresa Y pode receber entre $
Análse de Rsco 1 RISCO Rsco possbldade de perda. Quanto maor a possbldade, maor o rsco. Exemplo: Empresa X va receber $ 1.000 de uros em 30 das com títulos do governo. A empresa Y pode receber entre $
Gráficos de Controle para Processos Autocorrelacionados
 Gráfcos de Controle para Processos Autocorrelaconados Gráfco de controle de Shewhart: observações ndependentes e normalmente dstrbuídas. Shewhart ao crar os gráfcos de controle não exgu que os dados fossem
Gráfcos de Controle para Processos Autocorrelaconados Gráfco de controle de Shewhart: observações ndependentes e normalmente dstrbuídas. Shewhart ao crar os gráfcos de controle não exgu que os dados fossem
6 Modelo Proposto Introdução
 6 Modelo Proposto 6.1. Introdução Neste capítulo serão apresentados detalhes do modelo proposto nesta dssertação de mestrado, onde será utlzado um modelo híbrdo para se obter prevsão de carga curto prazo
6 Modelo Proposto 6.1. Introdução Neste capítulo serão apresentados detalhes do modelo proposto nesta dssertação de mestrado, onde será utlzado um modelo híbrdo para se obter prevsão de carga curto prazo
Desenvolvimento de software de simulação Monte Carlo para auxiliar no estudo da propagação de doenças infecciosas
 Desenvolvmento de software de smulação Monte Carlo para auxlar no estudo da propagação de doenças nfeccosas João Batsta dos Santos-Flho 1, Tatana Santos de Araujo Batsta 2, José Carlos Rodrgues Olvera
Desenvolvmento de software de smulação Monte Carlo para auxlar no estudo da propagação de doenças nfeccosas João Batsta dos Santos-Flho 1, Tatana Santos de Araujo Batsta 2, José Carlos Rodrgues Olvera
Gestão e Teoria da Decisão
 Gestão e Teora da Decsão Logístca e Gestão de Stocks Estratégas de Localzação Lcencatura em Engenhara Cvl Lcencatura em Engenhara do Terrtóro 1 Estratéga de Localzação Agenda 1. Classfcação dos problemas
Gestão e Teora da Decsão Logístca e Gestão de Stocks Estratégas de Localzação Lcencatura em Engenhara Cvl Lcencatura em Engenhara do Terrtóro 1 Estratéga de Localzação Agenda 1. Classfcação dos problemas
Laboratório de Mecânica Aplicada I Determinação de Centros de Gravidade
 Laboratóro de Mecânca Aplcada I Determnação de Centros de Gravdade Em mutos problemas de mecânca o efeto do peso dos corpos é representado por um únco vector, aplcado num ponto denomnado centro de gravdade.
Laboratóro de Mecânca Aplcada I Determnação de Centros de Gravdade Em mutos problemas de mecânca o efeto do peso dos corpos é representado por um únco vector, aplcado num ponto denomnado centro de gravdade.
Escalonamento Baseado em Prioridades Fixas
 Sstemas de Tempo Real: Escalonamento Baseado em Prordades Fxas Rômulo Slva de Olvera Departamento de Automação e Sstemas - DAS UFSC romulo@das.ufsc.br http://.das.ufsc.br/~romulo 1 Escalonamento Baseado
Sstemas de Tempo Real: Escalonamento Baseado em Prordades Fxas Rômulo Slva de Olvera Departamento de Automação e Sstemas - DAS UFSC romulo@das.ufsc.br http://.das.ufsc.br/~romulo 1 Escalonamento Baseado
3 Desenvolvimento do Modelo
 3 Desenvolvmento do Modelo Neste capítulo apresentaremos como está estruturado o modelo desenvolvdo nesta dssertação para otmzar o despacho de geradores dstrbuídos com o obetvo de reduzr os custos da rede
3 Desenvolvmento do Modelo Neste capítulo apresentaremos como está estruturado o modelo desenvolvdo nesta dssertação para otmzar o despacho de geradores dstrbuídos com o obetvo de reduzr os custos da rede
Capítulo 5. TEORIA DO CONTROLE DE TRÁFEGO
 1 Capítulo 5. TEOIA DO CONTOLE DE TÁFEGO O conhecmento apresentado até aqu é predomnantemente de cunho descrtvo, destnado a prever as condções de tráfego resultantes da nteração entre oferta e demanda
1 Capítulo 5. TEOIA DO CONTOLE DE TÁFEGO O conhecmento apresentado até aqu é predomnantemente de cunho descrtvo, destnado a prever as condções de tráfego resultantes da nteração entre oferta e demanda
UNIDADE IV DELINEAMENTO INTEIRAMENTE CASUALIZADO (DIC)
") UNDADE V DELNEAMENTO NTERAMENTE CASUALZADO (DC) CUABÁ, MT 015/ PROF.: RÔMULO MÔRA romulomora.webnode.com 1. NTRODUÇÃO Este delneamento apresenta como característca prncpal a necessdade de homogenedade
UNDADE V DELNEAMENTO NTERAMENTE CASUALZADO (DC) CUABÁ, MT 015/ PROF.: RÔMULO MÔRA romulomora.webnode.com 1. NTRODUÇÃO Este delneamento apresenta como característca prncpal a necessdade de homogenedade
4 Discretização e Linearização
 4 Dscretzação e Lnearzação Uma vez defndas as equações dferencas do problema, o passo segunte consste no processo de dscretzação e lnearzação das mesmas para que seja montado um sstema de equações algébrcas
4 Dscretzação e Lnearzação Uma vez defndas as equações dferencas do problema, o passo segunte consste no processo de dscretzação e lnearzação das mesmas para que seja montado um sstema de equações algébrcas
Mecanismos de Escalonamento
 Mecansmos de Escalonamento 1.1 Mecansmos de escalonamento O algortmo de escalonamento decde qual o próxmo pacote que será servdo na fla de espera. Este algortmo é um dos mecansmos responsáves por dstrbur
Mecansmos de Escalonamento 1.1 Mecansmos de escalonamento O algortmo de escalonamento decde qual o próxmo pacote que será servdo na fla de espera. Este algortmo é um dos mecansmos responsáves por dstrbur
Laboratório de Mecânica Aplicada I Estática: Roldanas e Equilíbrio de Momentos
 Laboratóro de Mecânca Aplcada I Estátca: Roldanas e Equlíbro de Momentos 1 Introdução O conhecmento das condções de equlíbro de um corpo é mprescndível em númeras stuações. Por exemplo, o estudo do equlíbro
Laboratóro de Mecânca Aplcada I Estátca: Roldanas e Equlíbro de Momentos 1 Introdução O conhecmento das condções de equlíbro de um corpo é mprescndível em númeras stuações. Por exemplo, o estudo do equlíbro
PROGRAMA INTERLABORATORIAL PARA ENSAIOS EM CHAPAS DE PAPELÃO ONDULADO CICLO 2013 PROTOCOLO
 PROGRAMA INTERLABORATORIAL PARA ENSAIOS EM CHAPAS DE PAPELÃO ONDULADO CICLO 013 PROTOCOLO CT-Floresta - LPC - FOI/004 7/11/01 Aprovado: Mara Luza Otero D'Almeda / SUMÁRIO 1 INTRODUÇÃO... 1 PÚBLICO ALVO...
PROGRAMA INTERLABORATORIAL PARA ENSAIOS EM CHAPAS DE PAPELÃO ONDULADO CICLO 013 PROTOCOLO CT-Floresta - LPC - FOI/004 7/11/01 Aprovado: Mara Luza Otero D'Almeda / SUMÁRIO 1 INTRODUÇÃO... 1 PÚBLICO ALVO...
3.6. Análise descritiva com dados agrupados Dados agrupados com variáveis discretas
 3.6. Análse descrtva com dados agrupados Em algumas stuações, os dados podem ser apresentados dretamente nas tabelas de frequêncas. Netas stuações devemos utlzar estratégas específcas para obter as meddas
3.6. Análse descrtva com dados agrupados Em algumas stuações, os dados podem ser apresentados dretamente nas tabelas de frequêncas. Netas stuações devemos utlzar estratégas específcas para obter as meddas
Algarismos Significativos Propagação de Erros ou Desvios
 Algarsmos Sgnfcatvos Propagação de Erros ou Desvos L1 = 1,35 cm; L = 1,3 cm; L3 = 1,30 cm L4 = 1,4 cm; L5 = 1,7 cm. Qual destas meddas está correta? Qual apresenta algarsmos com sgnfcado? O nstrumento
Algarsmos Sgnfcatvos Propagação de Erros ou Desvos L1 = 1,35 cm; L = 1,3 cm; L3 = 1,30 cm L4 = 1,4 cm; L5 = 1,7 cm. Qual destas meddas está correta? Qual apresenta algarsmos com sgnfcado? O nstrumento
PROGRAMA INTERLABORATORIAL PARA ENSAIOS EM CHAPAS DE PAPELÃO ONDULADO CICLO 2013 PROTOCOLO
 PROGRAMA INTERLABORATORIAL PARA ENSAIOS EM CHAPAS DE PAPELÃO ONDULADO CICLO 013 PROTOCOLO CT-Floresta - LPC - FOI/004 05/0/013 Aprovado: Mara Luza Otero D'Almeda / SUMÁRIO 1 INTRODUÇÃO... 1 PÚBLICO ALVO...
PROGRAMA INTERLABORATORIAL PARA ENSAIOS EM CHAPAS DE PAPELÃO ONDULADO CICLO 013 PROTOCOLO CT-Floresta - LPC - FOI/004 05/0/013 Aprovado: Mara Luza Otero D'Almeda / SUMÁRIO 1 INTRODUÇÃO... 1 PÚBLICO ALVO...
Os modelos de regressão paramétricos vistos anteriormente exigem que se suponha uma distribuição estatística para o tempo de sobrevivência.
 MODELO DE REGRESSÃO DE COX Os modelos de regressão paramétrcos vstos anterormente exgem que se suponha uma dstrbução estatístca para o tempo de sobrevvênca. Contudo esta suposção, caso não sea adequada,
MODELO DE REGRESSÃO DE COX Os modelos de regressão paramétrcos vstos anterormente exgem que se suponha uma dstrbução estatístca para o tempo de sobrevvênca. Contudo esta suposção, caso não sea adequada,
3 Definição automática de carregamento ótimo
 3 Defnção automátca de carregamento ótmo A formulação ncal mostrada neste capítulo fo feta por Sérgo Álvares Maffra[11] e parte da mplementação fo feta por Anderson Perera, tendo sofrdo algumas modfcações
3 Defnção automátca de carregamento ótmo A formulação ncal mostrada neste capítulo fo feta por Sérgo Álvares Maffra[11] e parte da mplementação fo feta por Anderson Perera, tendo sofrdo algumas modfcações
Chapter 9 Location INTRODUÇÃO. Localização de Instalações. Problemas de comunicação
 Chapter 9 Locaton Localzação de Instalações Problemas de comuncação http://www.youtube.com/watch?v=h_qnu4rwlvu INTRODUÇÃO INTRODUÇÃO Analsar padrões de localzação pode ser nteressante Porque a Whte Castle,
Chapter 9 Locaton Localzação de Instalações Problemas de comuncação http://www.youtube.com/watch?v=h_qnu4rwlvu INTRODUÇÃO INTRODUÇÃO Analsar padrões de localzação pode ser nteressante Porque a Whte Castle,
3 Método Numérico. 3.1 Discretização da Equação Diferencial
 3 Método Numérco O presente capítulo apresenta a dscretação da equação dferencal para o campo de pressão e a ntegração numérca da expressão obtda anterormente para a Vscosdade Newtonana Equvalente possbltando
3 Método Numérco O presente capítulo apresenta a dscretação da equação dferencal para o campo de pressão e a ntegração numérca da expressão obtda anterormente para a Vscosdade Newtonana Equvalente possbltando
Caderno de Fórmulas em Implementação. SWAP Alterações na curva Libor
 Caderno de Fórmulas em Implementação SWAP Alterações na curva Lbor Atualzado em: 15/12/217 Comuncado: 12/217 DN Homologação: - Versão: Mar/218 Índce 1 Atualzações... 2 2 Caderno de Fórmulas - SWAP... 3
Caderno de Fórmulas em Implementação SWAP Alterações na curva Lbor Atualzado em: 15/12/217 Comuncado: 12/217 DN Homologação: - Versão: Mar/218 Índce 1 Atualzações... 2 2 Caderno de Fórmulas - SWAP... 3
N Sem Bucha. N Sem Acessórios. B14 Flange Tipo C-DIN 211A. B5 Flange Tipo FF. B1 Bucha Simples 311A
 br M IBR q IBR qdr IBR qp IBR r IBR m IBR c IBR p IBR H IBR x varadores TRANS. ANGULARES motor acopla. Possundo apenas um par de engrenagens clíndrcas helcodas, a lnha de redutores e motorredutores IBR
br M IBR q IBR qdr IBR qp IBR r IBR m IBR c IBR p IBR H IBR x varadores TRANS. ANGULARES motor acopla. Possundo apenas um par de engrenagens clíndrcas helcodas, a lnha de redutores e motorredutores IBR
Ministério da Educação. Instituto Nacional de Estudos e Pesquisas Educacionais Anísio Teixeira. Cálculo do Conceito Preliminar de Cursos de Graduação
 Mnstéro da Educação Insttuto Naconal de Estudos e Pesqusas Educaconas Aníso Texera Cálculo do Conceto Prelmnar de Cursos de Graduação Nota Técnca Nesta nota técnca são descrtos os procedmentos utlzados
Mnstéro da Educação Insttuto Naconal de Estudos e Pesqusas Educaconas Aníso Texera Cálculo do Conceto Prelmnar de Cursos de Graduação Nota Técnca Nesta nota técnca são descrtos os procedmentos utlzados
UMA ABORDAGEM ALTERNATIVA PARA O ENSINO DO MÉTODO DOS MÍNIMOS QUADRADOS NO NÍVEL MÉDIO E INÍCIO DO CURSO SUPERIOR
 UNIVERSIDADE FEDERAL DE JUIZ DE FORA INSTITUTO DE CIÊNCIAS EATAS DEPARTAMENTO DE ESTATÍSTICA UMA ABORDAGEM ALTERNATIVA PARA O ENSINO DO MÉTODO DOS MÍNIMOS QUADRADOS NO NÍVEL MÉDIO E INÍCIO DO CURSO SUPERIOR
UNIVERSIDADE FEDERAL DE JUIZ DE FORA INSTITUTO DE CIÊNCIAS EATAS DEPARTAMENTO DE ESTATÍSTICA UMA ABORDAGEM ALTERNATIVA PARA O ENSINO DO MÉTODO DOS MÍNIMOS QUADRADOS NO NÍVEL MÉDIO E INÍCIO DO CURSO SUPERIOR
DIAGNÓSTICO EM MODELOS LINEARES GENERALIZADOS
 DIAGNÓSTICO EM MODELOS LINEARES GENERALIZADOS 1 A análse de dagnóstco (ou dagnóstco do ajuste) confgura uma etapa fundamental no ajuste de modelos de regressão. O objetvo prncpal da análse de dagnóstco
DIAGNÓSTICO EM MODELOS LINEARES GENERALIZADOS 1 A análse de dagnóstco (ou dagnóstco do ajuste) confgura uma etapa fundamental no ajuste de modelos de regressão. O objetvo prncpal da análse de dagnóstco
IMPLEMENTAÇÃO DO MÉTODO DE FATORAÇÃO DE INTEIROS CRIVO QUADRÁTICO
 IMPLEMENTAÇÃO DO MÉTODO DE FATORAÇÃO DE INTEIROS CRIVO QUADRÁTICO Alne de Paula Sanches 1 ; Adrana Betâna de Paula Molgora 1 Estudante do Curso de Cênca da Computação da UEMS, Undade Unverstára de Dourados;
IMPLEMENTAÇÃO DO MÉTODO DE FATORAÇÃO DE INTEIROS CRIVO QUADRÁTICO Alne de Paula Sanches 1 ; Adrana Betâna de Paula Molgora 1 Estudante do Curso de Cênca da Computação da UEMS, Undade Unverstára de Dourados;
2 Metodologia de Medição de Riscos para Projetos
 2 Metodologa de Medção de Rscos para Projetos Neste capítulo remos aplcar os concetos apresentados na seção 1.1 ao ambente de projetos. Um projeto, por defnção, é um empreendmento com metas de prazo, margem
2 Metodologa de Medção de Rscos para Projetos Neste capítulo remos aplcar os concetos apresentados na seção 1.1 ao ambente de projetos. Um projeto, por defnção, é um empreendmento com metas de prazo, margem
Responda às questões utilizando técnicas adequadas à solução de problemas de grande dimensão.
 Departamento de Produção e Sstemas Complementos de Investgação Operaconal Exame Época Normal, 1ª Chamada 11 de Janero de 2006 Responda às questões utlzando técncas adequadas à solução de problemas de grande
Departamento de Produção e Sstemas Complementos de Investgação Operaconal Exame Época Normal, 1ª Chamada 11 de Janero de 2006 Responda às questões utlzando técncas adequadas à solução de problemas de grande
Variação ao acaso. É toda variação devida a fatores não controláveis, denominadas erro.
 Aplcação Por exemplo, se prepararmos uma área expermental com todo cudado possível e fzermos, manualmente, o planto de 100 sementes seleconadas de um mlho híbrdo, cudando para que as sementes fquem na
Aplcação Por exemplo, se prepararmos uma área expermental com todo cudado possível e fzermos, manualmente, o planto de 100 sementes seleconadas de um mlho híbrdo, cudando para que as sementes fquem na
CAPÍTULO 2 DESCRIÇÃO DE DADOS ESTATÍSTICA DESCRITIVA
 CAPÍTULO DESCRIÇÃO DE DADOS ESTATÍSTICA DESCRITIVA. A MÉDIA ARITMÉTICA OU PROMÉDIO Defnção: é gual a soma dos valores do grupo de dados dvdda pelo número de valores. X x Soma dos valores de x número de
CAPÍTULO DESCRIÇÃO DE DADOS ESTATÍSTICA DESCRITIVA. A MÉDIA ARITMÉTICA OU PROMÉDIO Defnção: é gual a soma dos valores do grupo de dados dvdda pelo número de valores. X x Soma dos valores de x número de
7 Tratamento dos Dados
 7 Tratamento dos Dados 7.. Coefcentes de Troca de Calor O úmero de usselt local é dado por h( r )d u ( r ) (7-) k onde h(r), o coefcente local de troca de calor é h( r ) q''- perdas T q''- perdas (T( r
7 Tratamento dos Dados 7.. Coefcentes de Troca de Calor O úmero de usselt local é dado por h( r )d u ( r ) (7-) k onde h(r), o coefcente local de troca de calor é h( r ) q''- perdas T q''- perdas (T( r
Diferença entre a classificação do PIB per capita e a classificação do IDH
 Curso Bem Estar Socal Marcelo Ner - www.fgv.br/cps Metas Socas Entre as mutas questões decorrentes da déa de se mplementar uma proposta de metas socas temos: Qual a justfcatva econômca para a exstênca
Curso Bem Estar Socal Marcelo Ner - www.fgv.br/cps Metas Socas Entre as mutas questões decorrentes da déa de se mplementar uma proposta de metas socas temos: Qual a justfcatva econômca para a exstênca
1. ANÁLISE EXPLORATÓRIA E ESTATÍSTICA DESCRITIVA
 1. ANÁLISE EXPLORATÓRIA E ESTATÍSTICA DESCRITIVA 014 Estatístca Descrtva e Análse Exploratóra Etapas ncas. Utlzadas para descrever e resumr os dados. A dsponbldade de uma grande quantdade de dados e de
1. ANÁLISE EXPLORATÓRIA E ESTATÍSTICA DESCRITIVA 014 Estatístca Descrtva e Análse Exploratóra Etapas ncas. Utlzadas para descrever e resumr os dados. A dsponbldade de uma grande quantdade de dados e de
METODOLOGIA DE GERAÇÃO DE REDES SECUNDÁRIAS DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA PARA ESTUDOS DE PLANEJAMENTO
 METODOLOGIA DE GERAÇÃO DE REDES SECUNDÁRIAS DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA PARA ESTUDOS DE PLANEJAMENTO Leonardo Mendonça Olvera de Queroz Faculdade de Engenhara Elétrca e de Computação FEEC Unversdade
METODOLOGIA DE GERAÇÃO DE REDES SECUNDÁRIAS DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA PARA ESTUDOS DE PLANEJAMENTO Leonardo Mendonça Olvera de Queroz Faculdade de Engenhara Elétrca e de Computação FEEC Unversdade
DELINEAMENTOS EXPERIMENTAIS
 SUMÁRIO 1 Delneamentos Expermentas 2 1.1 Delneamento Interamente Casualzado..................... 2 1.2 Delneamento Blocos Casualzados (DBC).................... 3 1.3 Delneamento Quadrado Latno (DQL)......................
SUMÁRIO 1 Delneamentos Expermentas 2 1.1 Delneamento Interamente Casualzado..................... 2 1.2 Delneamento Blocos Casualzados (DBC).................... 3 1.3 Delneamento Quadrado Latno (DQL)......................
CONTROLADORES FUZZY. Um sistema de controle típico é representado pelo diagrama de blocos abaixo:
 CONTROLADORES FUZZY Um sstema de controle típco é representado pelo dagrama de blocos abaxo: entrada ou referênca - erro CONTROLADOR snal de controle PLANTA saída A entrada ou referênca expressa a saída
CONTROLADORES FUZZY Um sstema de controle típco é representado pelo dagrama de blocos abaxo: entrada ou referênca - erro CONTROLADOR snal de controle PLANTA saída A entrada ou referênca expressa a saída
Programação Dinâmica. Fernando Nogueira Programação Dinâmica 1
 Programação Dnâmca Fernando Noguera Programação Dnâmca A Programação Dnâmca procura resolver o problema de otmzação através da análse de uma seqüênca de problemas mas smples do que o problema orgnal. A
Programação Dnâmca Fernando Noguera Programação Dnâmca A Programação Dnâmca procura resolver o problema de otmzação através da análse de uma seqüênca de problemas mas smples do que o problema orgnal. A
METOLOGIA. 1. Histórico
 METOLOGIA A Sondagem da Construção Cvl do RS é uma sondagem de opnão empresaral realzada mensalmente e fo crada pela Confederação Naconal da Indústra (CNI) com o apoo da Câmara Braslera da Indústra da
METOLOGIA A Sondagem da Construção Cvl do RS é uma sondagem de opnão empresaral realzada mensalmente e fo crada pela Confederação Naconal da Indústra (CNI) com o apoo da Câmara Braslera da Indústra da
2 ENERGIA FIRME DE SISTEMAS HIDRELÉTRICOS
 ENERGIA FIRME DE SISTEMAS HIDRELÉTRICOS 22 2 ENERGIA FIRME DE SISTEMAS HIDRELÉTRICOS Como vsto no capítulo 1, a energa frme de uma usna hdrelétrca corresponde à máxma demanda que pode ser suprda contnuamente
ENERGIA FIRME DE SISTEMAS HIDRELÉTRICOS 22 2 ENERGIA FIRME DE SISTEMAS HIDRELÉTRICOS Como vsto no capítulo 1, a energa frme de uma usna hdrelétrca corresponde à máxma demanda que pode ser suprda contnuamente
CURSO de ESTATÍSTICA Gabarito
 UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA o semestre letvo de 010 e 1 o semestre letvo de 011 CURSO de ESTATÍSTICA Gabarto INSTRUÇÕES AO CANDIDATO Verfque se este caderno contém: PROVA DE REDAÇÃO com
UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA o semestre letvo de 010 e 1 o semestre letvo de 011 CURSO de ESTATÍSTICA Gabarto INSTRUÇÕES AO CANDIDATO Verfque se este caderno contém: PROVA DE REDAÇÃO com
INTRODUÇÃO À PROBABILIDADE. A probabilidade é uma medida da incerteza dos fenômenos. Traduz-se por um número real compreendido de 0 ( zero) e 1 ( um).
 e 1 ( um).") INTRODUÇÃO À PROILIDDE teora das probabldade nada mas é do que o bom senso transformado em cálculo probabldade é o suporte para os estudos de estatístca e expermentação. Exemplos: O problema da concdênca
INTRODUÇÃO À PROILIDDE teora das probabldade nada mas é do que o bom senso transformado em cálculo probabldade é o suporte para os estudos de estatístca e expermentação. Exemplos: O problema da concdênca
Ângulo de Inclinação (rad) [α min α max ] 1 a Camada [360,0 520,0] 2000 X:[-0,2065 0,2065] Velocidade da Onda P (m/s)
![Ângulo de Inclinação (rad) [α min α max ] 1 a Camada [360,0 520,0] 2000 X:[-0,2065 0,2065] Velocidade da Onda P (m/s)](/thumbs/81/84461056.jpg "Ângulo de Inclinação (rad) [α min α max ] 1 a Camada [360,0 520,0] 2000 X:[-0,2065 0,2065] Velocidade da Onda P (m/s)") 4 Estudo de Caso O estudo de caso, para avalar o método de estmação de parâmetros trdmensonal fo realzado em um modelo de referênca de três camadas, e foram realzados os seguntes passos: Descrção do modelo
4 Estudo de Caso O estudo de caso, para avalar o método de estmação de parâmetros trdmensonal fo realzado em um modelo de referênca de três camadas, e foram realzados os seguntes passos: Descrção do modelo
ROTEIRO PARA PROJETO / AVALIAÇÃO ACÚSTICA
 UNIVERSIDADE DE SÃO PAULO FACULDADE DE ARQUITETURA E URBANISMO DEPARTAMENTO DE TECNOLOGIA DA ARQUITETURA AUT 0278 - Desempenho Acústco, Arqutetura e Urbansmo ROTEIRO PARA PROJETO / AVALIAÇÃO ACÚSTICA 1)
UNIVERSIDADE DE SÃO PAULO FACULDADE DE ARQUITETURA E URBANISMO DEPARTAMENTO DE TECNOLOGIA DA ARQUITETURA AUT 0278 - Desempenho Acústco, Arqutetura e Urbansmo ROTEIRO PARA PROJETO / AVALIAÇÃO ACÚSTICA 1)
As leis de Kirchhoff. Capítulo
 UNI apítulo 11 s les de Krchhoff s les de Krchhoff são utlzadas para determnar as ntensdades de corrente elétrca em crcutos que não podem ser convertdos em crcutos smples. S empre que um crcuto não pode
UNI apítulo 11 s les de Krchhoff s les de Krchhoff são utlzadas para determnar as ntensdades de corrente elétrca em crcutos que não podem ser convertdos em crcutos smples. S empre que um crcuto não pode
CORRELAÇÃO E REGRESSÃO
 CORRELAÇÃO E REGRESSÃO Constata-se, freqüentemente, a estênca de uma relação entre duas (ou mas) varáves. Se tal relação é de natureza quanttatva, a correlação é o nstrumento adequado para descobrr e medr
CORRELAÇÃO E REGRESSÃO Constata-se, freqüentemente, a estênca de uma relação entre duas (ou mas) varáves. Se tal relação é de natureza quanttatva, a correlação é o nstrumento adequado para descobrr e medr
Modelo de Alocação de Vagas Docentes
 Reunão Comssão de Estudos de Alocação de Vagas Docentes da UFV Portara 0400/2016 de 04/05/2016 20 de mao de 2016 Comssão de Estudos das Planlhas de Alocação de Vagas e Recursos Ato nº 009/2006/PPO 19/05/2006
Reunão Comssão de Estudos de Alocação de Vagas Docentes da UFV Portara 0400/2016 de 04/05/2016 20 de mao de 2016 Comssão de Estudos das Planlhas de Alocação de Vagas e Recursos Ato nº 009/2006/PPO 19/05/2006
Reconhecimento Estatístico de Padrões
 Reconhecmento Estatístco de Padrões X 3 O paradgma pode ser sumarzado da segunte forma: Cada padrão é representado por um vector de característcas x = x1 x2 x N (,,, ) x x1 x... x d 2 = X 1 X 2 Espaço
Reconhecmento Estatístco de Padrões X 3 O paradgma pode ser sumarzado da segunte forma: Cada padrão é representado por um vector de característcas x = x1 x2 x N (,,, ) x x1 x... x d 2 = X 1 X 2 Espaço
CAPITULO II - FORMULAÇAO MATEMATICA
 CAPITULO II - FORMULAÇAO MATEMATICA II.1. HIPOTESES BASICAS A modelagem aqu empregada está baseado nas seguntes hpóteses smplfcadoras : - Regme permanente; - Ausênca de forças de campo; - Ausênca de trabalho
CAPITULO II - FORMULAÇAO MATEMATICA II.1. HIPOTESES BASICAS A modelagem aqu empregada está baseado nas seguntes hpóteses smplfcadoras : - Regme permanente; - Ausênca de forças de campo; - Ausênca de trabalho
Análise Dinâmica de uma Viga de Euler-Bernoulli Submetida a Impacto no Centro após Queda Livre Através do Método de Diferenças Finitas
 Proceedng Seres of the Brazlan Socety of Appled and Computatonal Mathematcs, Vol. 4, N., 06. Trabalho apresentado no DINCON, Natal - RN, 05. Proceedng Seres of the Brazlan Socety of Computatonal and Appled
Proceedng Seres of the Brazlan Socety of Appled and Computatonal Mathematcs, Vol. 4, N., 06. Trabalho apresentado no DINCON, Natal - RN, 05. Proceedng Seres of the Brazlan Socety of Computatonal and Appled
5 Implementação Procedimento de segmentação
 5 Implementação O capítulo segunte apresenta uma batera de expermentos prátcos realzados com o objetvo de valdar o método proposto neste trabalho. O método envolve, contudo, alguns passos que podem ser
5 Implementação O capítulo segunte apresenta uma batera de expermentos prátcos realzados com o objetvo de valdar o método proposto neste trabalho. O método envolve, contudo, alguns passos que podem ser
É o grau de associação entre duas ou mais variáveis. Pode ser: correlacional ou experimental.
 Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Numa relação expermental os valores de uma das
Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Numa relação expermental os valores de uma das
O QUEBRA-CABEÇA DE LANGFORD
 O QUEBRA-CABEÇA DE LANGFORD Mateus Mendes Magela Unversdade Federal do Espírto Santo mateusmendes.m@uol.com.br Resumo: O Quebra-Cabeça de Langford é um passatempo muto atraente e sufcentemente engenhoso
O QUEBRA-CABEÇA DE LANGFORD Mateus Mendes Magela Unversdade Federal do Espírto Santo mateusmendes.m@uol.com.br Resumo: O Quebra-Cabeça de Langford é um passatempo muto atraente e sufcentemente engenhoso
2 Lógica Fuzzy Introdução
 2 Lógca Fuzzy 2.. Introdução A lógca fuzzy é uma extensão da lógca booleana, ntroduzda pelo Dr. Loft Zadeh da Unversdade da Calfórna / Berkeley no ano 965. Fo desenvolvda para expressar o conceto de verdade
2 Lógca Fuzzy 2.. Introdução A lógca fuzzy é uma extensão da lógca booleana, ntroduzda pelo Dr. Loft Zadeh da Unversdade da Calfórna / Berkeley no ano 965. Fo desenvolvda para expressar o conceto de verdade
FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 1
 FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 1 Nome Nº Turma: Data: / / Professor 10.º Ano Classfcação Apresente o seu racocíno de forma clara, ndcando todos os cálculos que tver de efetuar e todas
FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 1 Nome Nº Turma: Data: / / Professor 10.º Ano Classfcação Apresente o seu racocíno de forma clara, ndcando todos os cálculos que tver de efetuar e todas
Avaliação de Económica de Projectos e Cálculo de Tarifas
 Gestão Avançada ada de Sstemas de Abastecmento de Água Avalação de Económca de Projectos e Cálculo de Tarfas Antóno Jorge Montero 26 de Mao de 2008 Aula 5-1 COCEITO DE PROJECTO Processo específco utlzado
Gestão Avançada ada de Sstemas de Abastecmento de Água Avalação de Económca de Projectos e Cálculo de Tarfas Antóno Jorge Montero 26 de Mao de 2008 Aula 5-1 COCEITO DE PROJECTO Processo específco utlzado
N Sem Acessórios. B14 Flange Tipo C-DIN. N Sem Bucha 202A 302A. B1 Bucha Simples. B5 Flange Tipo FF
 br C IBR q IBR qdr IBR qp IBR r IBR m IBR c IBR p IBR H IBR x varadores TRANS. ANGULARES motor acopla. Fabrcada com 2 ou 3 estágos de engrenagens clíndrcas helcodas, essa lnha de redutores e motorredutores
br C IBR q IBR qdr IBR qp IBR r IBR m IBR c IBR p IBR H IBR x varadores TRANS. ANGULARES motor acopla. Fabrcada com 2 ou 3 estágos de engrenagens clíndrcas helcodas, essa lnha de redutores e motorredutores
2 Agregação Dinâmica de Modelos de Turbinas e Reguladores de Velocidade: Teoria
 Agregação Dnâmca de Modelos de urbnas e Reguladores de elocdade: eora. Introdução O objetvo da agregação dnâmca de turbnas e reguladores de velocdade é a obtenção dos parâmetros do modelo equvalente, dados
Agregação Dnâmca de Modelos de urbnas e Reguladores de elocdade: eora. Introdução O objetvo da agregação dnâmca de turbnas e reguladores de velocdade é a obtenção dos parâmetros do modelo equvalente, dados
FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 4
 FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 4 Nome Nº Turma: Data: / / Professor 10.º Ano Classfcação Apresente o seu racocíno de forma clara, ndcando todos os cálculos que tver de efetuar e todas
FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 4 Nome Nº Turma: Data: / / Professor 10.º Ano Classfcação Apresente o seu racocíno de forma clara, ndcando todos os cálculos que tver de efetuar e todas
MODELOS DE REGRESSÃO PARAMÉTRICOS
 MODELOS DE REGRESSÃO PARAMÉTRICOS Às vezes é de nteresse nclur na análse, característcas dos ndvíduos que podem estar relaconadas com o tempo de vda. Estudo de nsufcênca renal: verfcar qual o efeto da
MODELOS DE REGRESSÃO PARAMÉTRICOS Às vezes é de nteresse nclur na análse, característcas dos ndvíduos que podem estar relaconadas com o tempo de vda. Estudo de nsufcênca renal: verfcar qual o efeto da
2ª PARTE Estudo do choque elástico e inelástico.
 2ª PARTE Estudo do choque elástco e nelástco. Introdução Consderemos dos corpos de massas m 1 e m 2, anmados de velocdades v 1 e v 2, respectvamente, movmentando-se em rota de colsão. Na colsão, os corpos
2ª PARTE Estudo do choque elástco e nelástco. Introdução Consderemos dos corpos de massas m 1 e m 2, anmados de velocdades v 1 e v 2, respectvamente, movmentando-se em rota de colsão. Na colsão, os corpos
TABELAS E GRÁFICOS PARA VARIÁVEIS ALEATÓRIAS QUANTITATIVAS CONTÍNUAS
 TABELAS E GRÁFICOS PARA VARIÁVEIS ALEATÓRIAS QUANTITATIVAS CONTÍNUAS Varável Qualquer característca assocada a uma população Classfcação de varáves Qualtatva { Nomnal sexo, cor dos olhos Ordnal Classe
TABELAS E GRÁFICOS PARA VARIÁVEIS ALEATÓRIAS QUANTITATIVAS CONTÍNUAS Varável Qualquer característca assocada a uma população Classfcação de varáves Qualtatva { Nomnal sexo, cor dos olhos Ordnal Classe
SÉRIE DE PROBLEMAS: CIRCUITOS DE ARITMÉTICA BINÁRIA. CIRCUITOS ITERATIVOS.
 I 1. Demonstre que o crcuto da Fg. 1 é um half-adder (semsomador), em que A e B são os bts que se pretendem somar, S é o bt soma e C out é o bt de transporte (carry out). Fg. 1 2. (Taub_5.4-1) O full-adder
I 1. Demonstre que o crcuto da Fg. 1 é um half-adder (semsomador), em que A e B são os bts que se pretendem somar, S é o bt soma e C out é o bt de transporte (carry out). Fg. 1 2. (Taub_5.4-1) O full-adder
Microeconomia II. Cursos de Economia e de Matemática Aplicada à Economia e Gestão AULA 5.3. Afectação de Bens Públicos: a Condição de Samuelson
 Mcroeconoma II Cursos de Economa e de Matemátca Aplcada à Economa e Gestão AULA 5.3 Afectação de Bens Públcos: a Condção de Isabel Mendes 2007-2008 5/3/2008 Isabel Mendes/MICRO II 5.3 Afectação de Bens
Mcroeconoma II Cursos de Economa e de Matemátca Aplcada à Economa e Gestão AULA 5.3 Afectação de Bens Públcos: a Condção de Isabel Mendes 2007-2008 5/3/2008 Isabel Mendes/MICRO II 5.3 Afectação de Bens
DEFINIÇÃO - MODELO LINEAR GENERALIZADO
 DEFINIÇÃO - MODELO LINEAR GENERALIZADO 1 Um modelo lnear generalzado é defndo pelos seguntes três componentes: Componente aleatóro; Componente sstemátco; Função de lgação; Componente aleatóro: Um conjunto
DEFINIÇÃO - MODELO LINEAR GENERALIZADO 1 Um modelo lnear generalzado é defndo pelos seguntes três componentes: Componente aleatóro; Componente sstemátco; Função de lgação; Componente aleatóro: Um conjunto
u a mesma área, na escala de 1: , tomadas a cada intervalo de 18 dias.
 QUANTFCAÇÃO E SENSORAMENTO REMOTO NA NVESTGAÇÃO GEOGRÁFCA A evolução recente da cênca tem colocado, com certa frequênca, o nvestgador em stuação crítca face à massa de nformações, dados e meos para sua
QUANTFCAÇÃO E SENSORAMENTO REMOTO NA NVESTGAÇÃO GEOGRÁFCA A evolução recente da cênca tem colocado, com certa frequênca, o nvestgador em stuação crítca face à massa de nformações, dados e meos para sua
AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA ANEEL RESOLUÇÃO NORMATIVA Nº 62, DE 5 DE MAIO DE 2004
 AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA ANEEL RESOLUÇÃO NORMATIVA Nº 62, DE 5 DE MAIO DE 2004 Estabelece os procedmentos para o cálculo do montante correspondente à energa de referênca de empreendmento de
AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA ANEEL RESOLUÇÃO NORMATIVA Nº 62, DE 5 DE MAIO DE 2004 Estabelece os procedmentos para o cálculo do montante correspondente à energa de referênca de empreendmento de
2003/2004. então o momento total das forças exercidas sobre o sistema é dado por. F ij = r i F (e)
") Resolução da Frequênca de Mecânca Clássca I/Mecânca Clássca 2003/2004 I Consdere um sstema de N partículas de massas m, =,..., N. a Demonstre que, se a força nterna exercda sobre a partícula pela partícula
Resolução da Frequênca de Mecânca Clássca I/Mecânca Clássca 2003/2004 I Consdere um sstema de N partículas de massas m, =,..., N. a Demonstre que, se a força nterna exercda sobre a partícula pela partícula
FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 3
 FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 3 Nome Nº Turma: Data: / / Professor 10.º Ano Classfcação Apresente o seu racocíno de forma clara, ndcando todos os cálculos que tver de efetuar e todas
FICHA de AVALIAÇÃO de MATEMÁTICA A 10.º Ano Versão 3 Nome Nº Turma: Data: / / Professor 10.º Ano Classfcação Apresente o seu racocíno de forma clara, ndcando todos os cálculos que tver de efetuar e todas
1. CORRELAÇÃO E REGRESSÃO LINEAR
 1 CORRELAÇÃO E REGREÃO LINEAR Quando deseja-se estudar se exste relação entre duas varáves quanttatvas, pode-se utlzar a ferramenta estatístca da Correlação Lnear mples de Pearson Quando essa correlação
1 CORRELAÇÃO E REGREÃO LINEAR Quando deseja-se estudar se exste relação entre duas varáves quanttatvas, pode-se utlzar a ferramenta estatístca da Correlação Lnear mples de Pearson Quando essa correlação
Guia 11 Escalonamento de Mensagens
 Até esta altura, temos abordado prncpalmente questões relaconadas com escalonamento de tarefas a serem executadas num únco processador. No entanto, é necessáro consderar o caso de sstemas tempo-real dstrbuídos,
Até esta altura, temos abordado prncpalmente questões relaconadas com escalonamento de tarefas a serem executadas num únco processador. No entanto, é necessáro consderar o caso de sstemas tempo-real dstrbuídos,
Análise da curva de crescimento de ovinos cruzados
 Análse da curva de crescmento de ovnos cruzados Dana Campos de Olvera DEX, UFLA Antôno Polcarpo Souza Carnero DET, UFV Joel Augusto Munz DEX, UFLA Introdução Os ovnos, assm como grande maora dos anmas
Análse da curva de crescmento de ovnos cruzados Dana Campos de Olvera DEX, UFLA Antôno Polcarpo Souza Carnero DET, UFV Joel Augusto Munz DEX, UFLA Introdução Os ovnos, assm como grande maora dos anmas
O problema da superdispersão na análise de dados de contagens
 O problema da superdspersão na análse de dados de contagens 1 Uma das restrções mpostas pelas dstrbuções bnomal e Posson, aplcadas usualmente na análse de dados dscretos, é que o parâmetro de dspersão
O problema da superdspersão na análse de dados de contagens 1 Uma das restrções mpostas pelas dstrbuções bnomal e Posson, aplcadas usualmente na análse de dados dscretos, é que o parâmetro de dspersão
Prof. Lorí Viali, Dr.
 Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Prof. Lorí Val, Dr. UFRG Insttuto de Matemátca
Prof. Lorí Val, Dr. val@mat.ufrgs.br http://www.mat.ufrgs.br/~val/ É o grau de assocação entre duas ou mas varáves. Pode ser: correlaconal ou expermental. Prof. Lorí Val, Dr. UFRG Insttuto de Matemátca
DESENVOLVIMENTO DE UM PRÉ-PROCESSADOR PARA ANÁLISE ISOGEOMÉTRICA
 DESENVOLVIMENTO DE UM PRÉ-PROCESSADOR PARA ANÁLISE ISOGEOMÉTRICA Pedro Luz Rocha Evandro Parente Junor pedroluzrr04@gmal.com evandroparentejr@gmal.com Laboratóro de Mecânca Computaconal e Vsualzação, Unversdade
DESENVOLVIMENTO DE UM PRÉ-PROCESSADOR PARA ANÁLISE ISOGEOMÉTRICA Pedro Luz Rocha Evandro Parente Junor pedroluzrr04@gmal.com evandroparentejr@gmal.com Laboratóro de Mecânca Computaconal e Vsualzação, Unversdade