Dinâmica do Movimento rotacional. Para que o qualquer tipo de movimento ocorra é necessário a aplicação de uma força.
|
|
|
- Victor Ferreira Fialho
- 6 Há anos
- Visualizações:
Transcrição


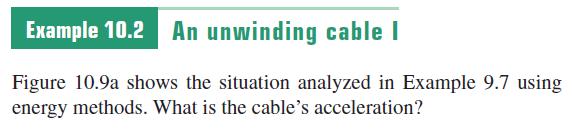
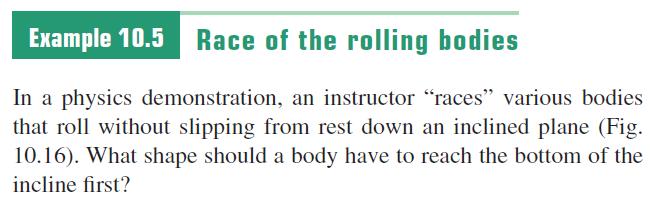
1 Fisica I IO Dinâmica do Movimento Rotacional Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Dinâmica do Movimento rotacional Para que o qualquer tipo de movimento ocorra é necessário a aplicação de uma força. No movimento de rotação, é necessário a aplicação de uma força que faça o corpo girar. Como veremos, podemos associar movimentos de rotação à uma nova quantidade física, o torque. Além da conservação da energia, para sistemas isolados, definiremos a conservação do momento angular do sistema. Este principio de conservação é extremamente util na descrição e compreensão do movimento de rotação de corpos. Veremos diversas aplicações como descrição dinâmica de um giroscópio ou de um pião. 1

2 Torque Como vimos anteriormente, forças agindo sobre um corpo podem afetar seu movimento translacional. Nesta descrição não nos importava a forma do corpo uma vez que tratávamos tudo como pontos materiais. Para que ocorram movimentos rotacionais a magnitude e direção da força são importantes, mas tão importante quanto é o ponto de aplicação desta força, uma vez que isso acabará ocasionando diferentes tipos de rotação. Na figura ao lado a chave de boca está sendo usada para soltar um parafuso. E três forças de igual magnitude são indicadas. A força F b aplicada próxima ao final da chave é mais efetiva do que uma força F a, aplicada próxima ao parafuso. Além disso, a força F, c não fornece nenhum tipo de contribuição, apesar de ser aplicada no mesmo ponto de F, mas está dirigida ao b longo do comprimento da chave. A quantidade que indica a tendência que uma força tem de causar ou mudar o movimento de rotação de um corpo é chamado de torque. Torque Vamos tomar o corpo abaixo, que pode girar em torno do eixo O. Três forças agem no corpo no plano da figura. Para a força F 1, a tendência para causar a rotação no ponto O depende da intensidade da força F. 1 Além disso, depende da distancia perpendicular l 1, entre o ponto O e a linha de ação, da força, isto é, a linha na qual o vetor força está. l 1 Chamamos a distancia como braço de alavanca (ou braço de momento) da força F 1 com relação a O. O esforço de torção é diretamente proporcional tanto a F quando a l 1 1. Sendo assim definimos torque (ou momento) da força F com respeito a O pelo simples produto F l Usa se a letra grega tau para torque. Para uma força com intensidade F cuja linha de ação é uma distancia perpendicular l a partir de O, definimos torque como, Os termos torque e momento são usualmente utizados, assim como braço da alavanca ou braço do momento. 2
3 Para diferenciar os torques da força F 1 e F 2 podemos definir o torque como positivo, quando causa rotação em sentido antihorário. Assim, torques que causam rotação em sentido horário, serão negativos. Com essa definição, No SI, a unidade de torque é Newtonmetro. Apesar de ter a mesma unidade, torque não é trabalho ou energia! (como veremos, torque é um vetor, ao passo que trabalho e energia são escalares!) Sendo assim a unidade que devemos utilizar para o torque é N.m enãoj(joules)! Como devemos proceder quando a linha de ação da Força atuante não é perpendicular ao braço da alavanca? O torque sempre corresponde à ação de uma força e braço com direções perpendiculares. Sendo assim, podemos pegar a componente da força perpendicular ao braço, ou a componente do braço de alavanca que é perpendicular à força aplicada. Matematicamente, Note que tanto a força F e o braço de alavanca r são vetores. Desta forma podemos escrever o torque como um produto destes dois vetores. Como o torque também é um vetor, qual tipo de produto seria?? 3



4 Torque como um vetor Como vimos anteriormente, tanto a velocidade angular quanto a aceleração angular podem ser representados por vetores. O mesmo é aplicado para o torque. Na realidade, a quantidade nada mais é do que a magnitude do produto vetorial. Logo, podemos generalizar o torque como: quando uma força F age em um ponto com posição r com respeito a uma origem O, o torque desta força com respeito a O é a quantidade vetorial, A direção do torque segue as regras do produto vetorial. Na verdade, os vetores r e F definem um plano e assim, o torque será um vetor perpendicular a este plano. Em termos práticos, pode se utilizar a regra da mão direita com F fechando sobre F. Como indicado na figura ao lado, esta definição indicará o sentido de rotação induzido pelo torque. Rotações em sentido anti horario, fornecem torques positivos ( para cima ) e rotações no sentido horario fornecem torques negativos ( para baixo ). Sendo assim o vetor torque, velocidade angular e aceleração angular possuem compreensões similares! 4

5 Torque e aceleração angular para um corpo rígido Lembremos do movimento linear: O movimento linear era descrito pela cinemática: posição, velocidade, aceleração, etc. Omovimentoera causadoporumaforça, com módulo, direção e sentido. Podemos agora definir a mesma sistemática para o movimento rotacional: O movimento de rotação era descrito pela cinemática: posição angular, velocidade angular, aceleração angular, etc. Omovimentode rotação é causadopor um torque, com módulo, direção e sentido. Torque e aceleração angular para um corpo rígido Vamos assumir um corpo rígido composto de várias partículas. Escolhemos como eixo z como eixo de rotação. A força resultante agindo sobre esta partícula pode ser descrita em termos de três componentes. Uma radial, F 1,rad, na mesma direção de r 1, outra tangencial, F 1,tan, tangente ao circulo de raio r 1 no qual esta partícula se move e outra ao longo do eixo de rotação, F 1z. Definidas as forças, podemos aplicar a Segunda Lei de Newton. A segunda lei de Newton para a componente tangencial fornece, Como vimos antes, podemos expressar esta componente tangencial em termos da aceleração angular z : a 1,tan =r 1 z. usando esta expressão para a aceleração tangencial e multiplicando ambos lados por r 1, 5


6 Torque e aceleração angular para um corpo rígido F 1,tan r 1 nada mais é do que o torque da força resultante com respeito ao eixo de rotação, ou seja a componente 1z. Nenhuma das outras forças, F 1,rad e F 1z, contribuem para o torque sob o eixo de rotação z, uma vez que não alteram a rotação da partícula com relação a este eixo. Agora, é o momento de inércia I 1 da partícula com massa m 1 com relação ao eixo de rotação, assim, Podemos obter uma equação similar para cada partícula que compõe o corpo. Assim, podemos somar todas as equações, No lado esquerdo temos a soma de todos os torques que age sobre o corpo rígido. No lado direito temos, o momento de inércia total do corpo rígido, multiplicado pela aceleração angular, que é a mesma para todo o corpo, pois ele é rigido. Assim, podemos finalmente escreve o análogo da Segunda lei de Newton para o movimento rotacional: Torque e aceleração angular para um corpo rígido Assim como a segunda Lei de Newton define a força resultante sobre uma partícula como sendo massa vezes aceleração, este resultado nos fala que o torque resultante em um corpo rígido é igual ao momento de inércia do corpo em relação a um dado eixo, multiplicado por sua aceleração angular. O torque em cada partícula do corpo é devido à força resultante nesta partícula, ou seja, a soma da ação das forças internas e externas. No entanto, pela terceira lei de Newton sabemos que as forças internas para qualquer par de partícula exercem forças iguais e opostas. Sendo assim, estas forças gerarão torques iguais e opostos, e deste modo, se somam a zero. Com isso, todos os torques internos são zero e só nos importa os torques feitos por forças externas. 6
7 7

8 Rotação em torno de um eixo em movimento Podemos estender as analises da dinâmica do movimento de rotação para casos onde o eixo de rotação se move. Quando isso acontece, o corpo terá um movimento de rotação e translação combinado. A chave para descrever estas situações consiste de entender que : Qualquer movimento possível do corpo rígido pode ser representado como uma combinação do movimento de translação do centro de massa e a rotação ao redor de um eixo passando pelo centro de massa. Esta afirmação é verdadeira mesmo que o centro de massa acelere, ou seja, para referenciais não inerciais. Exemplos são um bastonete em movimento balístico, um corpo em rolamento em um plano, um ioiô, etc. Translação e rotação combinadas: Relações energéticas Está além da abordagem deste curso demonstrar que o movimento de corpos rigidos podem sempre ser divididos entre o movimento de translação do centro de massa e o de rotação em torno do centro de massa. No entanto podemos demonstrar que isso é verdadeiro para a energia cinética de um corpo rígido que possui tanto movimento translacional e rotacional. Nestecasoaenergiacinéticadocorpoéasomadeumaparte associadacomo movimentodocentrodemassaedeoutraparte associadacomarotaçãoem torno de um eixo passando pelo centro de massa: Ou seja, podemos desacoplar as duas formas de energia para o movimento de um corpo rígido. 8

9 Demonstração: Vamos imaginar um corpo rígido feito por partículas. Como mostrado na figura ao lado, uma partícula com massa possui velocidade relativa a um referencial inercial. Esta velocidade é a soma vetorial da velocidade do centro de massa e a velocidade da partícula relativa ao centro de massa: A energia cinética K i desta partícula no referencial inercial é. Esta energia pode ser escrita como, Logo, Demonstração: A energia cinética total é a soma para todas as partículas que compõem o corpo. Utilizando esta definição na expressão anterior, temos O primeiro e segundo termos possuem fatores comuns que podem ser tirados fora da soma, Agora basta uma análise dos termos acima. O primeiro termo, é a massa total M. O segundo termo é zero pois é M multiplicado pela velocidade do centro de massa relativo ao centro de massa, que é zero por definição. O ultimo termo é a soma das energias cinéticas das partículas calculadas utilizando suas velocidades escalares com relação ao centro de massa. Este termo nada mais é do que a energia cinética de rotação em torno do centro de massa,. Logo, 9



10 Rolamento sem derrapagem Um caso muito importante de rotação e translação combinadas é o rolamento sem derrapagem. A roda é simétrica, logo o centro de massa está no centro geométrico. Vamos assumir o movimento em um referencial inercial de referencia no qual a superfície na qual arodarolaestáparada. Neste referencial, o ponto no qual a roda está em contato com a superfície está instantaneamente em repouso de como que não derrapa. Assim a velocidade e um ponto de contato relativo ao centro de massa deve ter a mesma magnitude mas direção oposta à velocidade do centro de massa Se o raio da roda é R e sua velocidade angular é, a magnitude de Fotografia instantânea de uma roda de bicicleta em rolamento é R, assim, 10
11 11

12 Translação e rotação combinadas: Dinâmica Podemos fazer a analise da translação e rotação em termos da dinâmica. Para um corpo de massa M, a aceleração do centro de massa é a mesma que teria uma massa M sob a ação de todas as forças externas agindo no corpo, O movimento de rotação em torno do centro de massa é descrito pelo análogo da Segunda Lei de Newton, Sendo I cm o momento de inercia com respeito a um eixo passando pelo centro de massa, e a soma inclui todos os torques com respeito a este eixo. Pode se demonstrar que esta equação para os torques é válida mesmo que o eixo de rotação se mova, desde que duas condições sejam válidas: 1. O eixo passando pelo centro de massa deve ser um eixo de simetria. 2. O eixo não muda sua direção. 12
 faz um trabalho neles. Um motor girando também realiza trabalho.")


13 Trabalho e Potencia no Movimento Rotacional Ao andar de bicicleta a força que você aplica nos pedais (um corpo em rotação) faz um trabalho neles. Um motor girando também realiza trabalho. Podemos descrever este trabalho em termos do torque e de deslocamentos angulares. Suponha uma força tangencial agindo sobre um disco pivotado. O disco roda um angulo infinitesimal d em torno do eixo fixo, durante um tempo infinitesimal dt. OtrabalhodW feito pala força quando o ponto no disco se move a uma distancia ds é Se d é medido em radianos, então, ds =Rd,logo, Agora, é o torque feito pela força, logo O trabalho total W feito pelo torque durante um deslocamento angular de 1 para 2 será, 13

14 Trabalho e Potencia no Movimento Rotacional Se o torque é constante durante a mudança angular, então, Se o torque é dado em N.m eoângulo em radianos,otrabalho será em Joules. Note a completa analogia com o movimento unidimensional, Trabalho e Potencia no Movimento Rotacional Quando o torque realiza trabalho em um corpo em rotação, a energia cinética muda por uma quantidade igual ao trabalho feito. Seja o torque total agindo sobre o corpo, de modo que. O corpo é rígido, de modo que o momento de inercia I é constante. Neste caso temos, Como é o torque total agindo sobre o corpo, a integral deste torque fornecerá o trabalho total agindo sobre o corpo, logo, A mudança na energia cinética rotacional em um corpo rígido é igual ao trabalho feito pelas forças externas ao corpo. Esta equação é análoga ao teorema trabalho energia para uma partícula. 14

15 Trabalho e Potencia no Movimento Rotacional Para obter a potencia associada ao torque, dividimos a equação do trabalho infinitesimal por dt: Mas dw/dt é a taxa de realização do trabalho, ou potencia P, ed /dt é a velocidade angular, logo, Veja que esta equação é análoga ao caso do movimento translacional, 15
 é a mesma relação do torque para com a força, Par uma partícula de massa m, velocidadev, momentop=m v, evetorposiçãor relativa a uma origem O de um")
16 Momento Angular Como mostrado anteriormente, todas as quantidades rotacionais possuem um análogo translacional. O análogo do momento de uma partícula é o momento angular, o qual denotaremos por L. Sua relação para com o momento p (momento linear) é a mesma relação do torque para com a força, Par uma partícula de massa m, velocidadev, momentop=m v, evetorposiçãor relativa a uma origem O de um referencial inercial, o momento angular L é definido como, O valor de L depende da origem escolhida, pois envolve o vetor posição relativo a O. As unidades de momento angular são kg.m 2 /s Na figura ao lado a partícula se move no plano xy. Sua posição r e seu momento p =mv são mostrados. O vetor momento angular L é perpendicular ao plano xy. A regra da mão direita mostra que sua direção será ao longo do eixo z positivo e seu modulo, onde l é a distancia perpendicular da reta suporte de v para com O. Esta distancia funciona como o braço da alavanca para o vetor momento. Quando a força F age na partícula, sua velocidade e momento mudam. Logo, seu momento angular também pode mudar. Para ver esta variação temporal no momento angular podemos tirar a derivada da equação do momento, dl d L r mv dr dv r mv mv r m dt dt dt dt O primeiro termo nos parênteses é zero pois dr/dt = v e v x v = 0. No segundo termo, podemos substituir ma pela força F. Assim, A taxa de mudança no momento angular de uma partícula é igual ao torque da força resultante agindo sobre ele. dp Análogo linear : F dt 16


17 Momento Angular de um corpo rígido Podemos agora obter o momento angular total de um corpo rígido girando ao redor do eixo z com velocidade angular. Primeiro consideramos uma fina fatia do corpo caindo no plano xy. Cada partícula nesta fatia se move em um circulo centralizado na origem e a cada instante sua velocidade v i é perpendicular ao vetor posição r i. Assim, = 90º para cada partícula. A partícula com massa m i na distancia r i a partir de O, tem a velocidade v i igual a r i. Assim, A direção do momento angular para cada partícula é dado pela regra da mão direita, na direção +z. O momento angular total desta fatia do corpo caindo no plano xy é a soma de todos os momentos angulares das partículas. Assim, sendo I o momento de inércia da fatia para com o eixo z. Momento Angular de um corpo rígido Podemos fazer o mesmo cálculo para as outras fatias do corpo, todas paralelas ao plano xy. Para pontos que não caiam no plano xy pode se ter uma complicação pois os respectivos vetores posição r possuirão componentes nas direções x, y e z. Com isso o momento angular de cada partícula terá componentes perpendiculares ao eixo z. Podemos fazer o mesmo cálculo para as outras fatias do corpo, todas paralelas ao plano xy. Para pontos que não caiam no plano xy pode se ter uma complicação pois os respectivos vetores posição r possuirão componentes nas direções x, y e z. Com isso o momento angular de cada partícula terá componentes perpendiculares ao eixo z. Noentanto,seoeixozforumeixodesimetria,as componentes perpendiculares das partículas em lados opostos se cancelarão e se somarão a zero. Assim quando o corpo gira em torno do eixo de simetria, seu momento angular L está alinhado ao eixo de simetria e possui modulo L=I 17


18 O vetor velocidade angular também está alinhado ao eixo de rotação, como visto antes. Sendo assim, para um corpo rígido girandoemtornodoeixodesimetria,l e estão na mesma direção. Desta maneira temos a forma vetorial, Como vimos antes, a taxa de mudança do momento angular de uma partícula é igual ao torque da força resultante agindo na partícula. Para qualquer sistema de partícula, a taxa de mudança do momento angular é igual à soma dos torques de todas as forças agindo em todas as partículas. Os torques das forças internas se cancelam e sendo assim a soma de todos os torques corresponde apenas às forças externas. Se o momento angular total L do sistema de partículas é a soma de todos os torques, Se o sistema de partículas é um corpo rígido girando em torno de um eixo de simetria, eixo z por exemplo, então, L z =I z eiéconstante.seesteeixoestáemumadireçãofixanoespaço então os vetores L e mudam apenas em magnitude, mas não em direção. Neste caso, dl z /dt =Id z /dt = I z : O que repete a equação da dinâmica de rotação de corpo rígido que obtivemos anteriormente. Note que se um corpo não é rígido esta equação não é valida pois I pode variar. No entanto a relação entre o torque resultante e a variação do momento angular é sempre válida! Quando o eixo de rotação não é um eixo de simetria o momento angular em geral não é paralelo ao eixo de rotação. Quando o corpo gira, o vetor momento angular L traça um cone ao redor do eixo de rotação. Como L muda, existe um torque resultante agindo sobre o corpo mesmo que o modulo velocidade angular seja constante. Se o corpo em questão é uma roda desbalanceada de um carro este torque acabará causando danos e desgastes nos rolamentos. Quando se faz o balanceamento de rodas, pela distribuição de massas em torno de um eixo de rotação, faz se com que o vetor L se alinhe ao eixo de rotação, e em conseqüência elimina se este torque resultante quando a roda gira. 18

19 Conservação do Momento Angular Os resultados anteriores relacionando torque e momento angular podem servir como definições alternativas para o movimento rotacional. Veremos agora o principio de conservação do momento angular. Assim como a conservação da energia e momento linear, este principio é uma lei universal, válida em todas as escalas de tamanho, desde sistemas atômicos e nucleares ao movimento de galáxias. Este principio vem diretamente da relação entre torque e variação do momento angular: dl Se, 0 dt dl 0 dt L constante Quando o torque resultante externo agindo em um sistema é zero, o momento angular total de um sistema é constante (conservado). 19

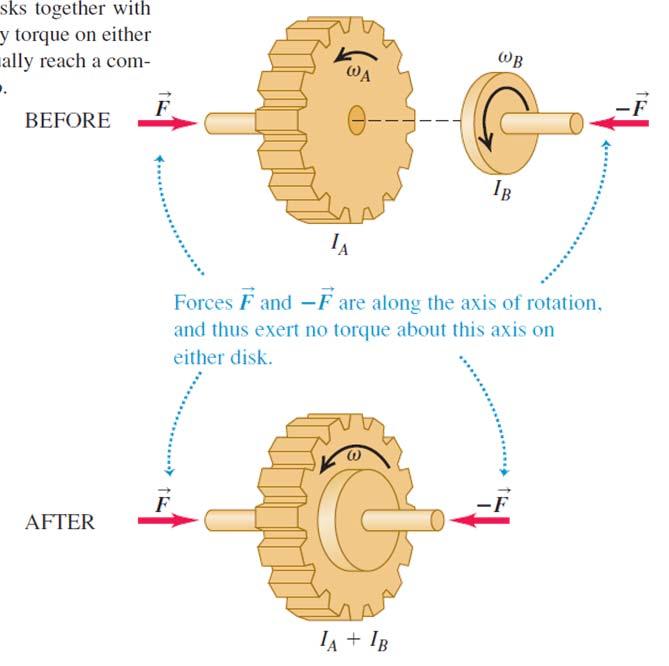
20 Conservação do Momento Angular Este principio de conservação fornece resultados bastante interessantes. Imagine uma acrobata girando em torno do centro de massa com braços e pernas estendidas. Quando ela encolhe os braços e pernas seu momento de inercia I cm com respeito ao centro de massa muda de um valor I 1 par outro valor I 2.Aúnicaforçaexterna agindo sobre ela é o peso, que não possui torque com respeito a um eixo passando pelo centro de massa. Assim, seu momento angular L z =I cm z fica constante e sua velocidade z aumenta quando I cm diminui, ou seja: Quando um esqueitista ou uma bailarina gira com braços estendidos e depois os recolhe, a velocidade angular aumenta pois o momento de inercia diminui. Isto é uma consequência direta da conservação do momento angular no qual a força externa ézero. Um caso interessante ocorre quando um sistema é composto de várias partes. Cada parte exerce força uma em outra de modo que os momentos angulares individuais se alteram. No entanto, o momento angular total não se altera! Imagine um sistema composto de dois corpos, A e B, que interagem somente entre si e com nenhum corpo mais. Se o corpo A exerce uma força em B, F AonB o torque correspondente será AonB. Este torque gera uma alteração no momento angular do corpo B, Aomesmotempo,ocorpoBexerceumaforçaF BonA em A, com torque correspondente, BonA, Da terceira lei de newton, F AonB = F BonA. Além disso se as forças agem ao longo da mesma linha, os braços de alavanca serão os mesmos. Assim os torques serão iguais e opostos. Logo, dla dlb d LA LB dltotal 0 dt dt dt dt Ou seja, o momento angular do sistema é constante. Os torques feitos pelas forças internas podem transferir momento angular de uma parte para outra dentro do corpo mas não podem alterar o momento angular total do sistema! 20


21 Pr ctu of re.c N ris ot tia es no Le 27/10/
22 22

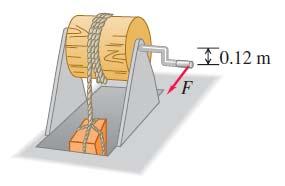
 e o peso w do disco, localizada no seu centro de massa à uma distância r da origem O.")
23 Giroscópio e Precessão Giroscópio e Precessão Para compreender a precessão deve se lembrar que a velocidade angular, momento angular e torque são quantidades vetoriais. Em particular, deve se ter em mente a relação entre o torque resultante que age sobre a variação do momento angular,. Vamos analisar duas situações. Inicialmente vamos assumir que o disco está parado. Tomamos como origemopivôdogiroscópio,oeassumimosqueo disco é simétrico, com massa M e momento de inércia I com relação ao eixo de rotação. O eixo de rotação está inicialmente colocado na direção x. As únicas forças agindo no giroscópio são a força normal n que age no pivô (sem atrito) e o peso w do disco, localizada no seu centro de massa à uma distância r da origem O. A força normal não faz torque pois age no pivô, mas o peso gera um torque na direção y. Inicialmente não temos rotação e o momento inicial L i ézero.comovimos,uma pequena alteração dl no momento angular em um pequeno intervalo de tempo se relaciona com o torque por: 23

24 Giroscópio e Precessão Esta mudança também está na direção y que é onde está direcionado. A cada intervalo dt o momento angular muda por incrementos adicionais dl na direção y pois o torque é constante. Este aumento do momento angular horizontal significa que o giroscópio gira (cai preso ao pivô) cada vez mais rápido em torno do eixo y. Giroscópio e Precessão Vejamos agora o que acontece quando o disco está inicialmente girando, de modo que o momento angular L i não é zero. Como o disco está girando em torno do eixo, L i está direcionado ao longo deste eixo. No entanto cada uma mudança no momento angular dl é perpendicular a este eixo uma vez que o torque é perpendicular aesteeixo. Isto causa alteração na direção de L, masnãonaseu módulo. As mudanças dl são sempre no plano horizontal xy então o vetor momento angular e o eixo do disco que comelesemoveestãosempreemumplanohorizontal. Em outras palavras, o eixo não cai, apenas sofre precessão. 24

, temos, A velocidade de precessão angular é inversamente proporcional à velocidade angular de rotação ao redor do eixo. Um giroscópio gira rápido precessão lentamente.")
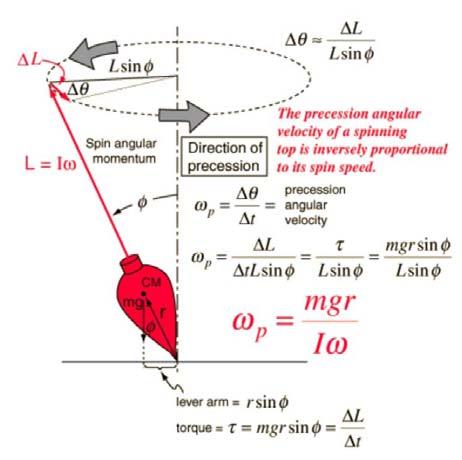
25 Giroscópio e Precessão Vamos obter a velocidade de precessão. O giroscópio possui momento angular L. um intervalo dt depois, o momento angular será L+dL; a mudança infinitesimal no momento angular é, dl=tdt, o qual é perpendicular à L, conforme indicado no diagrama ao lado. Como o incremento é perpendicular, isso significa que o giroscópio girou um pequeno angulo d dado por dfi=xxxx. A taxa no qual o eixo de move, d /dt é chamada velocidade angular de precessão. Chamando esta unidade de (ômega), temos, A velocidade de precessão angular é inversamente proporcional à velocidade angular de rotação ao redor do eixo. Um giroscópio gira rápido precessão lentamente. Se o atrito nos rolamentos faz com que sua velocidade angular diminua, a velocidade de precessão aumenta! Precessão da Terra Velocidade de precessão da terra: 1 rev / anos 25

26 Precessão de um Pião 26

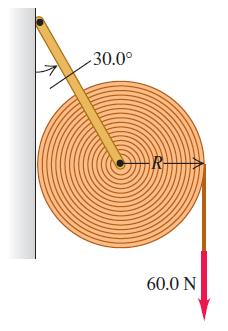
27 T b R w 27

28 28
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
Capítulo 10. Rotação. Copyright 2014 John Wiley & Sons, Inc. All rights reserved.
 Capítulo 10 Rotação Copyright 10-1 Variáveis Rotacionais Agora estudaremos o movimento de rotação Aplicam-se as mesmas leis Mas precisamos de novas variáveis para expressá-las o o Torque Inércia rotacional
Capítulo 10 Rotação Copyright 10-1 Variáveis Rotacionais Agora estudaremos o movimento de rotação Aplicam-se as mesmas leis Mas precisamos de novas variáveis para expressá-las o o Torque Inércia rotacional
Rotação de Corpos Rígidos
 Fisica I IO Rotação de Corpos Rígidos Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Rotação de Corpos Rígidos Movimentos de corpos contínuos podiam em muitos casos ser descritos
Fisica I IO Rotação de Corpos Rígidos Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Rotação de Corpos Rígidos Movimentos de corpos contínuos podiam em muitos casos ser descritos
Translação e Rotação Energia cinética de rotação Momentum de Inércia Torque. Física Geral I ( ) - Capítulo 07. I. Paulino*
 - Capítulo 07. I. Paulino*") ROTAÇÃO Física Geral I (1108030) - Capítulo 07 I. Paulino* *UAF/CCT/UFCG - Brasil 2012.2 1 / 25 Translação e Rotação Sumário Definições, variáveis da rotação e notação vetorial Rotação com aceleração angular
ROTAÇÃO Física Geral I (1108030) - Capítulo 07 I. Paulino* *UAF/CCT/UFCG - Brasil 2012.2 1 / 25 Translação e Rotação Sumário Definições, variáveis da rotação e notação vetorial Rotação com aceleração angular
Halliday & Resnick Fundamentos de Física
 Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
As variáveis de rotação
 Capítulo 10 Rotação Neste capítulo vamos estudar o movimento de rotação de corpos rígidos sobre um eixo fixo. Para descrever esse tipo de movimento, vamos introduzir os seguintes conceitos novos: -Deslocamento
Capítulo 10 Rotação Neste capítulo vamos estudar o movimento de rotação de corpos rígidos sobre um eixo fixo. Para descrever esse tipo de movimento, vamos introduzir os seguintes conceitos novos: -Deslocamento
Halliday & Resnick Fundamentos de Física
 Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Física aplicada à engenharia I
 Física aplicada à engenharia I Rotação - I 10.2 As Variáveis da Rotação Um corpo rígido é um corpo que gira com todas as partes ligadas entre si e sem mudar de forma. Um eixo fixo é um eixo de rotação
Física aplicada à engenharia I Rotação - I 10.2 As Variáveis da Rotação Um corpo rígido é um corpo que gira com todas as partes ligadas entre si e sem mudar de forma. Um eixo fixo é um eixo de rotação
Física para Zootecnia
 Física para Zootecnia Rotação - I 10.2 As Variáveis da Rotação Um corpo rígido é um corpo que gira com todas as partes ligadas entre si e sem mudar de forma. Um eixo fixo é um eixo de rotação cuja posição
Física para Zootecnia Rotação - I 10.2 As Variáveis da Rotação Um corpo rígido é um corpo que gira com todas as partes ligadas entre si e sem mudar de forma. Um eixo fixo é um eixo de rotação cuja posição
CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR
 O que vamos estudar? CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR Seção 11.1 Cinemática do corpo rígido Seção 11.2 Representação vetorial das rotações Seção 11.3 Torque Seção 11.4 Momento angular Seção 11.5
O que vamos estudar? CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR Seção 11.1 Cinemática do corpo rígido Seção 11.2 Representação vetorial das rotações Seção 11.3 Torque Seção 11.4 Momento angular Seção 11.5
Rolamento, Torque, e Momento Angular
 Capítulo 11 Rolamento, Torque, e Momento Angular Copyright 11-1 Rolamento como Translação e Rotação combinadas Figura 11-2 11-1 Rolamento como Translação e Rotação combinadas Consideramos apenas objetos
Capítulo 11 Rolamento, Torque, e Momento Angular Copyright 11-1 Rolamento como Translação e Rotação combinadas Figura 11-2 11-1 Rolamento como Translação e Rotação combinadas Consideramos apenas objetos
Dinâmica do Movimento de Rotação
 www.engenhariafacil.net Resumo com exercícios resolvidos do assunto: Dinâmica do Movimento de Rotação (1)- TORQUE, CONSIDERAÇÕES INICIAIS: Já estudamos que a atuação de forças em um corpo altera o movimento
www.engenhariafacil.net Resumo com exercícios resolvidos do assunto: Dinâmica do Movimento de Rotação (1)- TORQUE, CONSIDERAÇÕES INICIAIS: Já estudamos que a atuação de forças em um corpo altera o movimento
AI-34D Instrumentação Industrial Física Dinâmica de Rotação
 Universidade Tecnológica Federal do Paraná Tecnologia em Automação Industrial AI-34D Instrumentação Industrial Física Dinâmica de Rotação Prof a Daniele Toniolo Dias F. Rosa http://paginapessoal.utfpr.edu.br/danieletdias
Universidade Tecnológica Federal do Paraná Tecnologia em Automação Industrial AI-34D Instrumentação Industrial Física Dinâmica de Rotação Prof a Daniele Toniolo Dias F. Rosa http://paginapessoal.utfpr.edu.br/danieletdias
Notas de aula resumo de mecânica. Prof. Robinson RESUMO DE MECÂNICA
 RESUMO DE MECÂNICA Ano 2014 1 1. DINÂMICA DE UMA PARTÍCULA 1.1. O referencial inercial. O referencial inercial é um sistema de referência que está em repouso ou movimento retilíneo uniforme ao espaço absoluto.
RESUMO DE MECÂNICA Ano 2014 1 1. DINÂMICA DE UMA PARTÍCULA 1.1. O referencial inercial. O referencial inercial é um sistema de referência que está em repouso ou movimento retilíneo uniforme ao espaço absoluto.
Capítulo 11 Rotações e Momento Angular
 Capítulo 11 Rotações e Momento Angular Corpo Rígido Um corpo rígido é um corpo ideal indeformável de tal forma que a distância entre 2 pontos quaisquer do corpo não muda nunca. Um corpo rígido pode realizar
Capítulo 11 Rotações e Momento Angular Corpo Rígido Um corpo rígido é um corpo ideal indeformável de tal forma que a distância entre 2 pontos quaisquer do corpo não muda nunca. Um corpo rígido pode realizar
Capítulo 9 - Rotação de Corpos Rígidos
 Aquino Lauri Espíndola 1 1 Departmento de Física Instituto de Ciências Exatas - ICEx, Universidade Federal Fluminense Volta Redonda, RJ 27.213-250 1 de dezembro de 2010 Conteúdo 1 e Aceleração Angular
Aquino Lauri Espíndola 1 1 Departmento de Física Instituto de Ciências Exatas - ICEx, Universidade Federal Fluminense Volta Redonda, RJ 27.213-250 1 de dezembro de 2010 Conteúdo 1 e Aceleração Angular
Dinâmica. Prof.ª Betty Carvalho Rocha Gonçalves do Prado
 Dinâmica Prof.ª Betty Carvalho Rocha Gonçalves do Prado betty.prado@kroton.com.br bettycarvalho@ig.com.br CORPO RÍGIDO São corpos cuja dimensões não são desprezáveis Corpo rígido É um conceito limite ideal,
Dinâmica Prof.ª Betty Carvalho Rocha Gonçalves do Prado betty.prado@kroton.com.br bettycarvalho@ig.com.br CORPO RÍGIDO São corpos cuja dimensões não são desprezáveis Corpo rígido É um conceito limite ideal,
Aula do cap. 10 Rotação
 Aula do cap. 10 Rotação Conteúdo da 1ª Parte: Corpos rígidos em rotação; Variáveis angulares; Equações Cinemáticas para aceleração Angular constante; Relação entre Variáveis Lineares e Angulares; Referência:
Aula do cap. 10 Rotação Conteúdo da 1ª Parte: Corpos rígidos em rotação; Variáveis angulares; Equações Cinemáticas para aceleração Angular constante; Relação entre Variáveis Lineares e Angulares; Referência:
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo
 Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
Física I 2010/2011. Aula 13 Rotação I
 Física I 2010/2011 Aula 13 Rotação I Sumário As variáveis do movimento de rotação As variáveis da rotação são vectores? Rotação com aceleração angular constante A relação entre as variáveis lineares e
Física I 2010/2011 Aula 13 Rotação I Sumário As variáveis do movimento de rotação As variáveis da rotação são vectores? Rotação com aceleração angular constante A relação entre as variáveis lineares e
Deslocamento, velocidade e aceleração angular. s r
 Rotação Deslocamento, velocidade e aceleração angular s r s r O comprimento de uma circunferência é πr que corresponde um ângulo de π rad (uma revolução) ( rad) (deg ou graus) 180 Exemplo 0 60 3 rad Porque
Rotação Deslocamento, velocidade e aceleração angular s r s r O comprimento de uma circunferência é πr que corresponde um ângulo de π rad (uma revolução) ( rad) (deg ou graus) 180 Exemplo 0 60 3 rad Porque
Cap.12: Rotação de um Corpo Rígido
 Cap.12: Rotação de um Corpo Rígido Do professor para o aluno ajudando na avaliação de compreensão do capítulo. Fundamental que o aluno tenha lido o capítulo. Introdução: Produto vetorial Ilustração da
Cap.12: Rotação de um Corpo Rígido Do professor para o aluno ajudando na avaliação de compreensão do capítulo. Fundamental que o aluno tenha lido o capítulo. Introdução: Produto vetorial Ilustração da
d) [1,0 pt.] Determine a velocidade v(t) do segundo corpo, depois do choque, em relação à origem O do sistema de coordenadas mostrado na figura.
![d) [1,0 pt.] Determine a velocidade v(t) do segundo corpo, depois do choque, em relação à origem O do sistema de coordenadas mostrado na figura.](/thumbs/62/47865426.jpg "d) [1,0 pt.] Determine a velocidade v(t) do segundo corpo, depois do choque, em relação à origem O do sistema de coordenadas mostrado na figura.") 1) Uma barra delgada homogênea de comprimento L e massa M está inicialmente em repouso como mostra a figura. Preso a uma de suas extremidades há um objeto de massa m e dimensões desprezíveis. Um segundo
1) Uma barra delgada homogênea de comprimento L e massa M está inicialmente em repouso como mostra a figura. Preso a uma de suas extremidades há um objeto de massa m e dimensões desprezíveis. Um segundo
v CM K = ½ I CM a CM
 ENGENHARIA 1 ROLAMENTO O rolamento é um movimento que associa translação e rotação. É o caso, por exemplo, de uma roda que, ao mesmo tempo que rotaciona em torno de seu eixo central, translada como um
ENGENHARIA 1 ROLAMENTO O rolamento é um movimento que associa translação e rotação. É o caso, por exemplo, de uma roda que, ao mesmo tempo que rotaciona em torno de seu eixo central, translada como um
Profº Carlos Alberto
 Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
LECTURE NOTES PROF. CRISTIANO. Movimento em 3 dimensões. Posição e vetor Velocidade
 Fisica I IO Movimento em 3 dimensões Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Posição e vetor Velocidade 1 Durante o intervalo de tempo t a partícula se move do ponto P 1 onde
Fisica I IO Movimento em 3 dimensões Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Posição e vetor Velocidade 1 Durante o intervalo de tempo t a partícula se move do ponto P 1 onde
MOVIMENTO 3D: REFERENCIAL EM TRANSLAÇÃO
 MOVIMENTO 3D: REFERENCIAL EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço gira o braço para baixo e em
MOVIMENTO 3D: REFERENCIAL EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço gira o braço para baixo e em
MOVIMENTO 3D REFERENCIAL AUXILIAR EM TRANSLAÇÃO. QUESTÃO ver vídeo 1.1
 MOVIMENTO 3D REFERENCIAL AUXILIAR EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço comanda o giro do braço
MOVIMENTO 3D REFERENCIAL AUXILIAR EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço comanda o giro do braço
Prof. Dr. Ronaldo Rodrigues Pelá. 12 de março de 2013
 GIROSCÓPIO Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 12 de março de 2013 Roteiro 1 2 Roteiro 1 2 Dinâmica F (ext) = M a CM τ (ext) = d L dt L = M r CM v CM + L CM τ (ext) CM = d L
GIROSCÓPIO Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 12 de março de 2013 Roteiro 1 2 Roteiro 1 2 Dinâmica F (ext) = M a CM τ (ext) = d L dt L = M r CM v CM + L CM τ (ext) CM = d L
Deslocamento: Desse modo, o deslocamento entre as posições 1 e 2 seria dado por: m
 Deslocamento: x = xf - x i Desse modo, o deslocamento entre as posições 1 e 2 seria dado por: x = x - x = 72-30 = 42 1 2 2 1 m Se a execução do deslocamento ou espaço percorrido por um objeto ou partícula
Deslocamento: x = xf - x i Desse modo, o deslocamento entre as posições 1 e 2 seria dado por: x = x - x = 72-30 = 42 1 2 2 1 m Se a execução do deslocamento ou espaço percorrido por um objeto ou partícula
Física I para a Escola Politécnica ( ) - P3 (24/06/2016) [16A7]
![Física I para a Escola Politécnica ( ) - P3 (24/06/2016) [16A7]](/thumbs/95/122894415.jpg "Física I para a Escola Politécnica ( ) - P3 (24/06/2016) [16A7]") Física I para a Escola Politécnica (330) - P3 (/0/0) [A] NUSP: 0 0 0 0 0 0 0 3 3 3 3 3 3 3 8 8 8 8 8 8 8 9 9 9 9 9 9 9 Instruções: preencha completamente os círculos com os dígitos do seu número USP (um
Física I para a Escola Politécnica (330) - P3 (/0/0) [A] NUSP: 0 0 0 0 0 0 0 3 3 3 3 3 3 3 8 8 8 8 8 8 8 9 9 9 9 9 9 9 Instruções: preencha completamente os círculos com os dígitos do seu número USP (um
Lista 8 : Cinemática das Rotações NOME:
 Lista 8 : Cinemática das Rotações NOME: Turma: Prof. : Matrícula: Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Lista 8 : Cinemática das Rotações NOME: Turma: Prof. : Matrícula: Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA
 MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA 1.0 Definições Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É conveniente representar a posição da partícula com suas
MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA 1.0 Definições Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É conveniente representar a posição da partícula com suas
Universidade de São Paulo
 Universidade de São Paulo Uma volta no carrossel Instituto de Física da USP Física I para a Escola Politécnica 2016 Uma criança de 25 kg, em um playground, corre com uma velocidade escalar inicial de 2,
Universidade de São Paulo Uma volta no carrossel Instituto de Física da USP Física I para a Escola Politécnica 2016 Uma criança de 25 kg, em um playground, corre com uma velocidade escalar inicial de 2,
Prof. Dr. Ronaldo Rodrigues Pelá. 12 de março de 2013
 DINÂMICA Mecânica II (FIS-6) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 1 de março de 013 Roteiro 1 Roteiro 1 : caso geral Componente do momento angular ao longo do eixo de rotação é L = I ω Mas o momento
DINÂMICA Mecânica II (FIS-6) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 1 de março de 013 Roteiro 1 Roteiro 1 : caso geral Componente do momento angular ao longo do eixo de rotação é L = I ω Mas o momento
MOVIMENTO 3D: EQUAÇÕES DE MOVIMENTO
 MOVIMENTO 3D: EQUAÇÕES DE MOVIMENTO INTRODUÇÃO ESTUDO DE CASO Um motor de dois cilindros roda em vazio a 1000 rpm quando a válvula borboleta é aberta. Como a forma assimétrica da árvore de manivelas e
MOVIMENTO 3D: EQUAÇÕES DE MOVIMENTO INTRODUÇÃO ESTUDO DE CASO Um motor de dois cilindros roda em vazio a 1000 rpm quando a válvula borboleta é aberta. Como a forma assimétrica da árvore de manivelas e
Curso Física 1. Aula Dinâmica de Rotação de um Corpo Rígido
 Curso Física Aula - 8 Dinâmica de Rotação de um Corpo Rígido Torque, Definição: Torque,, é a tendência de uma força causar rotação num objeto ao redor de um determinado eixo. Seja F uma força agindo
Curso Física Aula - 8 Dinâmica de Rotação de um Corpo Rígido Torque, Definição: Torque,, é a tendência de uma força causar rotação num objeto ao redor de um determinado eixo. Seja F uma força agindo
Física I 2010/2011. Aula 16. Momento de uma Força e Momento Angular
 Física I 2010/2011 Aula 16 Momento de uma Força e Momento Angular Sumário O Momento angular A 2.ª Lei de Newton na forma angular O Momento Angular de um Sistema de Partículas O Momento Angular de um Corpo
Física I 2010/2011 Aula 16 Momento de uma Força e Momento Angular Sumário O Momento angular A 2.ª Lei de Newton na forma angular O Momento Angular de um Sistema de Partículas O Momento Angular de um Corpo
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: As condições que
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: As condições que
Física I Prova 2 20/02/2016
 Física I Prova 2 20/02/2016 NOME MATRÍCULA TURMA PROF. Lembrete: A prova consta de 3 questões discursivas (que deverão ter respostas justificadas, desenvolvidas e demonstradas matematicamente) e 10 questões
Física I Prova 2 20/02/2016 NOME MATRÍCULA TURMA PROF. Lembrete: A prova consta de 3 questões discursivas (que deverão ter respostas justificadas, desenvolvidas e demonstradas matematicamente) e 10 questões
1.6 Dinâmica da Rotação: Torque e Momento Angular
 1.6 Dinâmica da Rotação: Torque e Momento Angular Até o momento havíamos considerado o movimento de corpos rígidos sem nos preocupar com o que causava tal movimento. Nos limitamos apenas à descrever o
1.6 Dinâmica da Rotação: Torque e Momento Angular Até o momento havíamos considerado o movimento de corpos rígidos sem nos preocupar com o que causava tal movimento. Nos limitamos apenas à descrever o
Lista 12: Rotação de corpos rígidos
 Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. iv. Siga a estratégia para
Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. iv. Siga a estratégia para
MOVIMENTO 3D: EQUAÇÕES DE MOVIMENTO. No instante em que a válvula borboleta é aberta, qual é a aceleração angular
 INTRODUÇÃO ESTUDO DE CASO MOVIMENTO 3D: EQUAÇÕES DE MOVIMENTO Um motor de dois cilindros roda em vazio, a 1000 rpm, quando a válvula borboleta (que regula o fluxo de ar e altera a carga de trabalho) é
INTRODUÇÃO ESTUDO DE CASO MOVIMENTO 3D: EQUAÇÕES DE MOVIMENTO Um motor de dois cilindros roda em vazio, a 1000 rpm, quando a válvula borboleta (que regula o fluxo de ar e altera a carga de trabalho) é
FEP Física Geral e Experimental para Engenharia I
 FEP195 - Física Geral e Experimental para Engenharia I Prova P3 - Gabarito 1. Três partículas de massa m estão presas em uma haste fina e rígida de massa desprezível e comprimento l. O conjunto assim formado
FEP195 - Física Geral e Experimental para Engenharia I Prova P3 - Gabarito 1. Três partículas de massa m estão presas em uma haste fina e rígida de massa desprezível e comprimento l. O conjunto assim formado
Física I. Lista de Exercícios LIVE: Exercícios P3
 Física I Lista de Exercícios LIVE: Exercícios P3 Lista de Exercícios 1. Centro de Massa P2 2016.1 Diurno Exercício 9 Uma chapa metálica de densidade superficial uniforme (I) pode ser cortada das formas
Física I Lista de Exercícios LIVE: Exercícios P3 Lista de Exercícios 1. Centro de Massa P2 2016.1 Diurno Exercício 9 Uma chapa metálica de densidade superficial uniforme (I) pode ser cortada das formas
ESPAÇO PARA RESPOSTA COM DESENVOLVIMENTO
 Parte 2 - P2 de Física I - 2016-2 NOME: DRE Teste 1 Nota Q1 Assinatura: Questão 1 - [2,4 ponto] Dois blocos se deslocam em linha reta sobre uma mesa horizontal sem atrito. O bloco A, de massa m, tem velocidade
Parte 2 - P2 de Física I - 2016-2 NOME: DRE Teste 1 Nota Q1 Assinatura: Questão 1 - [2,4 ponto] Dois blocos se deslocam em linha reta sobre uma mesa horizontal sem atrito. O bloco A, de massa m, tem velocidade
Disciplina de Mecânica Geral II. CINEMÁTICA e DINÂMICA de CORPOS RÍGIDOS
 isciplina de Mecânica Geral II CINEMÁTIC e INÂMIC de CORPOS RÍGIOS CINEMÁTIC é o estudo da geometria em movimento, utilizada para relacionar as grandezas de deslocamento, velocidade, aceleração e tempo.
isciplina de Mecânica Geral II CINEMÁTIC e INÂMIC de CORPOS RÍGIOS CINEMÁTIC é o estudo da geometria em movimento, utilizada para relacionar as grandezas de deslocamento, velocidade, aceleração e tempo.
LECTURE NOTES PROF. CRISTIANO. Leis de Newton. Isaac Newton. Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202
 Fisica I - IO Leis de Newton Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br http://pt.wikipedia.org/wiki/isaac_newton Isaac Newton Teorema Binomial Cálculo Lei da gravitação universal
Fisica I - IO Leis de Newton Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br http://pt.wikipedia.org/wiki/isaac_newton Isaac Newton Teorema Binomial Cálculo Lei da gravitação universal
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Onde estamos? Nosso roteiro ao longo deste capítulo Cinemática retilínea: movimento contínuo
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Onde estamos? Nosso roteiro ao longo deste capítulo Cinemática retilínea: movimento contínuo
Física 1. Rotação e Corpo Rígido Resumo P3
 Física 1 Rotação e Corpo Rígido Resumo P3 Fórmulas e Resumo Teórico Momento Angular - Considerando um corpo de massa m a um momento linear p, temos: L = r p = r mv Torque - Considerando uma força F em
Física 1 Rotação e Corpo Rígido Resumo P3 Fórmulas e Resumo Teórico Momento Angular - Considerando um corpo de massa m a um momento linear p, temos: L = r p = r mv Torque - Considerando uma força F em
O Sistema Massa-Mola
 O Sistema Massa-Mola 1 O sistema massa mola, como vimos, é um exemplo de sistema oscilante que descreve um MHS. Como sabemos (aplicando a Segunda Lei de Newton) temos que F = ma Como sabemos, no caso massa-mola
O Sistema Massa-Mola 1 O sistema massa mola, como vimos, é um exemplo de sistema oscilante que descreve um MHS. Como sabemos (aplicando a Segunda Lei de Newton) temos que F = ma Como sabemos, no caso massa-mola
ENERGIA CINÉTICA E TRABALHO
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ENERGIA CINÉTICA E TRABALHO Prof. Bruno Farias Introdução Neste módulo concentraremos nossa
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ENERGIA CINÉTICA E TRABALHO Prof. Bruno Farias Introdução Neste módulo concentraremos nossa
Equipe de Física. Física. Movimento Circular
 Aluno (a): Série: 3ª Turma: TUTORIAL 3B Ensino Médio Equipe de Física Data: Física Movimento Circular Grandezas Angulares As grandezas até agora utilizadas de deslocamento/espaço (s, h, x, y), de velocidade
Aluno (a): Série: 3ª Turma: TUTORIAL 3B Ensino Médio Equipe de Física Data: Física Movimento Circular Grandezas Angulares As grandezas até agora utilizadas de deslocamento/espaço (s, h, x, y), de velocidade
DINÂMICA APLICADA. Livro Texto adotado: Dinâmica: Mecânica para Engenheiros R.C. Hibbeler.
 DINÂMICA APLICADA Livro Texto adotado: Dinâmica: Mecânica para Engenheiros R.C. Hibbeler. Samuel Sander de Carvalho Samuel.carvalho@ifsudestemg.edu.br Juiz de Fora MG Introdução: Objetivo: Desenvolver
DINÂMICA APLICADA Livro Texto adotado: Dinâmica: Mecânica para Engenheiros R.C. Hibbeler. Samuel Sander de Carvalho Samuel.carvalho@ifsudestemg.edu.br Juiz de Fora MG Introdução: Objetivo: Desenvolver
Considerando a variação temporal do momento angular de um corpo rígido que gira ao redor de um eixo fixo, temos:
 Segunda Lei de Newton para Rotações Considerando a variação temporal do momento angular de um corpo rígido que gira ao redor de um eixo fixo, temos: L t = I ω t e como L/ t = τ EXT e ω/ t = α, em que α
Segunda Lei de Newton para Rotações Considerando a variação temporal do momento angular de um corpo rígido que gira ao redor de um eixo fixo, temos: L t = I ω t e como L/ t = τ EXT e ω/ t = α, em que α
Física 1 Mecânica. Instituto de Física - UFRJ
 Física 1 Mecânica Sandra Amato Instituto de Física - UFRJ Rotação de uma partícula 1/ 30 (Rotação de uma partícula) Física 1 1/28 Outline 1 Produto Vetorial 2 Rotação em Torno de um Eixo Fixo 2/ 30 (Rotação
Física 1 Mecânica Sandra Amato Instituto de Física - UFRJ Rotação de uma partícula 1/ 30 (Rotação de uma partícula) Física 1 1/28 Outline 1 Produto Vetorial 2 Rotação em Torno de um Eixo Fixo 2/ 30 (Rotação
O pêndulo simples é constituído por uma partícula de massa
 AULA 42 APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES OBJETIVOS: APLICAR A TEORIA DO MOVIMENTO HARMÔNICO SIMPLES A PÊNDULOS 42.1 PÊNDULO SIMPLES: O pêndulo simples é constituído por uma partícula de massa
AULA 42 APLICAÇÕES DO MOVIMENTO HARMÔNICO SIMPLES OBJETIVOS: APLICAR A TEORIA DO MOVIMENTO HARMÔNICO SIMPLES A PÊNDULOS 42.1 PÊNDULO SIMPLES: O pêndulo simples é constituído por uma partícula de massa
Mecânica Clássica Curso - Licenciatura em Física EAD. Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA
 Mecânica Clássica Curso - Licenciatura em Física EAD Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA Aula 1 : Cinemática da partícula Aula 1 : Cinemática da partícula Exemplos Um tubo metálico, retilíneo
Mecânica Clássica Curso - Licenciatura em Física EAD Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA Aula 1 : Cinemática da partícula Aula 1 : Cinemática da partícula Exemplos Um tubo metálico, retilíneo
ESPAÇO PARA RESPOSTA COM DESENVOLVIMENTO
 Parte 2 - P2 de Física I - 2016-2 NOME: DRE Teste 1 Nota Q1 Assinatura: Questão 1 - [2,4 ponto] Dois pequenos discos (que podem ser considerados como partículas), de massas m e 2m, se deslocam sobre uma
Parte 2 - P2 de Física I - 2016-2 NOME: DRE Teste 1 Nota Q1 Assinatura: Questão 1 - [2,4 ponto] Dois pequenos discos (que podem ser considerados como partículas), de massas m e 2m, se deslocam sobre uma
CENTRO DE MASSA E MOMENTO LINEAR
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I CENTRO DE MASSA E MOMENTO LINEAR Prof. Bruno Farias Introdução Neste módulo vamos discutir
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I CENTRO DE MASSA E MOMENTO LINEAR Prof. Bruno Farias Introdução Neste módulo vamos discutir
Física I para a Escola Politécnica ( ) - P3 (07/07/2017)
 - P3 (07/07/2017)") Física I para a Escola Politécnica (433101) - P3 (07/07/017) [0000]-p1/9 QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4) (1) [1,0] Uma bola de sinuca de raio r rola sem deslizar do topo de um domo esférico com raio
Física I para a Escola Politécnica (433101) - P3 (07/07/017) [0000]-p1/9 QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4) (1) [1,0] Uma bola de sinuca de raio r rola sem deslizar do topo de um domo esférico com raio
Rotações de corpos rígidos
 Rotações de corpos rígidos Alexandre Furlan Fundamentos de Mecânica - FIS065 Turmas E1 E2 E3 29 de outubro de 2018 Alexandre Furlan (Aula 18) Fundamentos de Mecânica 29 de outubro de 2018 1 / 10 Objetivos
Rotações de corpos rígidos Alexandre Furlan Fundamentos de Mecânica - FIS065 Turmas E1 E2 E3 29 de outubro de 2018 Alexandre Furlan (Aula 18) Fundamentos de Mecânica 29 de outubro de 2018 1 / 10 Objetivos
Lista 12: Rotação de corpos rígidos
 Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. Siga a estratégia para
Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. Siga a estratégia para
META 2 CINEMÁTICA VETORIAL
 META 2 CINEMÁTICA VETORIAL As grandezas da cinemática escalar (posição, deslocamento, velocidade e aceleração) ganham nova cara. Agora não importa mais somente o módulo da grandeza, mas também sua direção
META 2 CINEMÁTICA VETORIAL As grandezas da cinemática escalar (posição, deslocamento, velocidade e aceleração) ganham nova cara. Agora não importa mais somente o módulo da grandeza, mas também sua direção
Física 1. 3 a prova 09/12/2017. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 3 a prova 09/12/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise a
Física 1 3 a prova 09/12/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise a
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Journal Club Transistor de Datta-Das S. Datta, B. Das, Appl. Phys. Lett. 56, 665 (1990)
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Journal Club Transistor de Datta-Das S. Datta, B. Das, Appl. Phys. Lett. 56, 665 (1990)
Lista 10: Dinâmica das Rotações NOME:
 Lista 10: Dinâmica das Rotações NOME: Turma: Prof. : Matrícula: Importante: i. Nas cinco páginas seguintes contém problemas para serem resolvidos e entregues. ii. Ler os enunciados com atenção. iii. Responder
Lista 10: Dinâmica das Rotações NOME: Turma: Prof. : Matrícula: Importante: i. Nas cinco páginas seguintes contém problemas para serem resolvidos e entregues. ii. Ler os enunciados com atenção. iii. Responder
Cap. 9 - Rotação do Corpo Rígido. 1 Posição, Velocidade e Aceleração Angulares
 Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 9 - Rotação do Corpo Rígido Prof. Elvis Soares Para nós, um corpo rígido é um objeto indeformável, ou seja, nesse corpo
Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 9 - Rotação do Corpo Rígido Prof. Elvis Soares Para nós, um corpo rígido é um objeto indeformável, ou seja, nesse corpo
A figura abaixo mostra a variação de direção do vetor velocidade em alguns pontos.
 EDUCANDO: Nº: TURMA: DATA: / / LIVRES PARA PENSAR EDUCADOR: Rosiméri dos Santos ESTUDOS DE RECUPERAÇÃO - MOVIMENTO CIRCULAR UNIFORME Introdução Dizemos que uma partícula está em movimento circular quando
EDUCANDO: Nº: TURMA: DATA: / / LIVRES PARA PENSAR EDUCADOR: Rosiméri dos Santos ESTUDOS DE RECUPERAÇÃO - MOVIMENTO CIRCULAR UNIFORME Introdução Dizemos que uma partícula está em movimento circular quando
Potencial Elétrico. Energia. Energia pode ser vista como trabalho armazenado, ou capacidade de realizar trabalho.
 Eletricidade e Magnetismo - IME Potencial Elétrico Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Energia Energia pode ser vista como trabalho armazenado, ou capacidade de realizar trabalho. Equipamentos
Eletricidade e Magnetismo - IME Potencial Elétrico Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Energia Energia pode ser vista como trabalho armazenado, ou capacidade de realizar trabalho. Equipamentos
QUESTÕES DISCURSIVAS
 QUESTÕES DISCURSIVAS Questão 1. (3 pontos) Numa mesa horizontal sem atrito, dois corpos, de massas 2m e m, ambos com a mesma rapidez v, colidem no ponto O conforme a figura. A rapidez final do corpo de
QUESTÕES DISCURSIVAS Questão 1. (3 pontos) Numa mesa horizontal sem atrito, dois corpos, de massas 2m e m, ambos com a mesma rapidez v, colidem no ponto O conforme a figura. A rapidez final do corpo de
Movimento Circular. 1 Rotação. Aron Maciel
 Movimento Circular Aron Maciel 1 Rotação Já sabemos como as leis e definições da Física funcionam no movimento retilíneo, agora, vamos investigar situações em que temos objetos rotacionando em torno de
Movimento Circular Aron Maciel 1 Rotação Já sabemos como as leis e definições da Física funcionam no movimento retilíneo, agora, vamos investigar situações em que temos objetos rotacionando em torno de
Física I para a Escola Politécnica ( ) - PSub (14/07/2017)
 - PSub (14/07/2017)") [0000]-p1/8 QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4) Respostas: z7ba: (1) E; () D; (3) C; (4) A; yy3: (1) D; () A; (3) E; (4) E; E1zy: (1) E; () A; (3) E; (4) E; zgxz: (1) B; () C; (3) B; (4) C; (1) [1,0] Um
[0000]-p1/8 QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4) Respostas: z7ba: (1) E; () D; (3) C; (4) A; yy3: (1) D; () A; (3) E; (4) E; E1zy: (1) E; () A; (3) E; (4) E; zgxz: (1) B; () C; (3) B; (4) C; (1) [1,0] Um
Física 1 Mecânica. Instituto de Física - UFRJ
 Física 1 Mecânica Sandra Amato Instituto de Física - UFRJ Produto Vetorial Torque e momento Angular de Uma Partícula 1/ 32 (Rotação de uma partícula) Física 1 1/32 Outline 1 Produto Vetorial 2 Momento
Física 1 Mecânica Sandra Amato Instituto de Física - UFRJ Produto Vetorial Torque e momento Angular de Uma Partícula 1/ 32 (Rotação de uma partícula) Física 1 1/32 Outline 1 Produto Vetorial 2 Momento
Cap.04 Cinemática em duas Dimensões
 Cap.04 Cinemática em duas Dimensões Do professor para o aluno ajudando na avaliação de compreensão do capítulo. Fundamental que o aluno tenha lido o capítulo. 4.1 Aceleração Entender a Eq. 4.1: o vetor
Cap.04 Cinemática em duas Dimensões Do professor para o aluno ajudando na avaliação de compreensão do capítulo. Fundamental que o aluno tenha lido o capítulo. 4.1 Aceleração Entender a Eq. 4.1: o vetor
Energia Potencial e Conservação de Energia. Energia Potencial Gravitacional
 Fisica I IO Energia Potencial e Conservação de Energia Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Energia Potencial Gravitacional Energia Potencial : Energia associada com a
Fisica I IO Energia Potencial e Conservação de Energia Prof. Cristiano Oliveira Ed. Basilio Jafet sala 202 crislpo@if.usp.br Energia Potencial Gravitacional Energia Potencial : Energia associada com a
Universidade Federal do Pampa UNIPAMPA. Oscilações. Prof. Luis Armas
 Universidade Federal do Pampa UNIPAMPA Oscilações Prof. Luis Armas Que é uma oscilação? Qual é a importância de estudar oscilações? SUMARIO Movimentos oscilatórios periódicos Movimento harmônico simples
Universidade Federal do Pampa UNIPAMPA Oscilações Prof. Luis Armas Que é uma oscilação? Qual é a importância de estudar oscilações? SUMARIO Movimentos oscilatórios periódicos Movimento harmônico simples
Física 2 - Aula 3. frof. Afonso Henriques Silva Leite. 1 de setembro de Nesta aula, serão apresentados os seguintes conceitos:
 Física 2 - Aula 3. frof. Afonso Henriques Silva Leite 1 de setembro de 2016 1 Plano da aula. Nesta aula, serão apresentados os seguintes conceitos: Determinação do torque pelos métodos da decomposição
Física 2 - Aula 3. frof. Afonso Henriques Silva Leite 1 de setembro de 2016 1 Plano da aula. Nesta aula, serão apresentados os seguintes conceitos: Determinação do torque pelos métodos da decomposição
Movimento Circular Uniforme
 Movimento Circular Uniforme 2018 Dr. Walter F. de Azevedo Jr. Prof. Dr. Walter F. de Azevedo Jr. E-mail: walter@azevedolab.net 1 Movimento Circular Uniforme (otação) Considere um disco rígido de densidade
Movimento Circular Uniforme 2018 Dr. Walter F. de Azevedo Jr. Prof. Dr. Walter F. de Azevedo Jr. E-mail: walter@azevedolab.net 1 Movimento Circular Uniforme (otação) Considere um disco rígido de densidade
Lista 7. Campo magnético, força de Lorentz, aplicações
 Lista 7 Campo magnético, força de Lorentz, aplicações Q28.1) Considere a equação da força magnética aplicada sobre uma partícula carregada se movendo numa região com campo magnético: F = q v B. R: Sim,
Lista 7 Campo magnético, força de Lorentz, aplicações Q28.1) Considere a equação da força magnética aplicada sobre uma partícula carregada se movendo numa região com campo magnético: F = q v B. R: Sim,
Física 1. 2 a prova 02/07/2016. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 2 a prova 02/07/2016 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Física 1 2 a prova 02/07/2016 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Lista 9 : Dinâmica Rotacional
 Lista 9 : Dinâmica Rotacional NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Lista 9 : Dinâmica Rotacional NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Física 1. 2 a prova 26/11/2016. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 2 a prova 26/11/2016 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Física 1 2 a prova 26/11/2016 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
PROGRAD / COSEAC Padrão de Respostas Física Grupos 05 e 20
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
Apresentação Outras Coordenadas... 39
 Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Física 1. 2 a prova 02/07/2016. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 2 a prova 02/07/2016 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Física 1 2 a prova 02/07/2016 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Física 1 VS 16/12/2017. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 VS 16/12/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua resposta.
Física 1 VS 16/12/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua resposta.
ESPAÇO PARA RESPOSTA COM DESENVOLVIMENTO
 Parte 2 - P3 de Física I - 2018-1 NOME: DRE Teste 0 Assinatura: Questão 1 - [2,5 pontos] Um bloco de massamestá pendurado por um fio ideal que está enrolado em uma polia fixa, mas que pode girar em torno
Parte 2 - P3 de Física I - 2018-1 NOME: DRE Teste 0 Assinatura: Questão 1 - [2,5 pontos] Um bloco de massamestá pendurado por um fio ideal que está enrolado em uma polia fixa, mas que pode girar em torno
Mecânica Geral Aula 03- Momento de Inércia Bibliografia e Figuras: Halliday, Resnick e Walker, vol 1, 8a Ed. LTC Tipler e Mosca, vol 1, 6a Ed.
 Mecânica Geral Aula 03- Momento de Inércia Bibliografia e Figuras: Halliday, Resnick e Walker, vol 1, 8a Ed. LTC Tipler e Mosca, vol 1, 6a Ed. Prof. Ettore Baldini-Neto baldini@uninove.br Nas aulas anteriores
Mecânica Geral Aula 03- Momento de Inércia Bibliografia e Figuras: Halliday, Resnick e Walker, vol 1, 8a Ed. LTC Tipler e Mosca, vol 1, 6a Ed. Prof. Ettore Baldini-Neto baldini@uninove.br Nas aulas anteriores
Física 1. Resumo e Exercícios P1
 Física 1 Resumo e Exercícios P1 Fórmulas e Resumo Teórico Parte 1 Derivada de polinômios - Considerando um polinômio P x = ax %, temos: d P x = anx%() dx Integral de polinômios - Considerando um polinômio
Física 1 Resumo e Exercícios P1 Fórmulas e Resumo Teórico Parte 1 Derivada de polinômios - Considerando um polinômio P x = ax %, temos: d P x = anx%() dx Integral de polinômios - Considerando um polinômio
Parte 2 - P2 de Física I Nota Q Nota Q2 NOME: DRE Teste 1
 Parte 2 - P2 de Física I - 2017-2 Nota Q1 88888 Nota Q2 NOME: DRE Teste 1 Assinatura: AS RESPOSTAS DAS QUESTÕES DISCURSIVAS DEVEM SER APRESENTADAS APENAS NAS FOLHAS GRAMPE- ADAS DE FORMA CLARA E ORGANIZADA.
Parte 2 - P2 de Física I - 2017-2 Nota Q1 88888 Nota Q2 NOME: DRE Teste 1 Assinatura: AS RESPOSTAS DAS QUESTÕES DISCURSIVAS DEVEM SER APRESENTADAS APENAS NAS FOLHAS GRAMPE- ADAS DE FORMA CLARA E ORGANIZADA.
Física I. Dinâmica de Corpos Rígidos Lista de Exercícios
 Física I Dinâmica de Corpos Rígidos Lista de Exercícios 1. Campo de Velocidades e Centro Instantâneo de Rotação Dados os itens abaixo, responda ao que se pede: a. O disco abaixo está preso a uma articulação
Física I Dinâmica de Corpos Rígidos Lista de Exercícios 1. Campo de Velocidades e Centro Instantâneo de Rotação Dados os itens abaixo, responda ao que se pede: a. O disco abaixo está preso a uma articulação
13/4/2011. Quantidade de movimento x Massa Quantidade de movimento x Velocidade. Colisão frontal: ônibus x carro
 FORÇA x BRAÇO DE MOMENTO (Unidade: N.m) Régua sobre a mesa Torque = F senθ.r = r sen θ. F = F.d Braço de momento (d) = menor distância ou distância perpendicular do eixo à força Carolina Peixinho carolina@peb.ufrj.br
FORÇA x BRAÇO DE MOMENTO (Unidade: N.m) Régua sobre a mesa Torque = F senθ.r = r sen θ. F = F.d Braço de momento (d) = menor distância ou distância perpendicular do eixo à força Carolina Peixinho carolina@peb.ufrj.br
Equipe de Física. Física. Movimento Circular
 Aluno (a): Série: 3ª Turma: TUTORIAL 3R Ensino Médio Equipe de Física Data: Física Movimento Circular Grandezas Angulares As grandezas até agora utilizadas de deslocamento/espaço (s, h, x, y), de velocidade
Aluno (a): Série: 3ª Turma: TUTORIAL 3R Ensino Médio Equipe de Física Data: Física Movimento Circular Grandezas Angulares As grandezas até agora utilizadas de deslocamento/espaço (s, h, x, y), de velocidade
Parte 2 - P2 de Física I NOME: DRE Teste 1
 Parte 2 - P2 de Física I - 2017-1 NOME: DRE Teste 1 Nota Q1 Questão 1 - [3,7 ponto] Um carretel é composto por um cilindro interno de raio r = R/2 e massa M, enrolado por um fio ideal, com 2 discos idênticos,
Parte 2 - P2 de Física I - 2017-1 NOME: DRE Teste 1 Nota Q1 Questão 1 - [3,7 ponto] Um carretel é composto por um cilindro interno de raio r = R/2 e massa M, enrolado por um fio ideal, com 2 discos idênticos,
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Mecânica Mecânica: estuda o estado de movimento (ou repouso) de corpos sujeitos à ação
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Mecânica Mecânica: estuda o estado de movimento (ou repouso) de corpos sujeitos à ação
Questões Conceituais
 Questões em Sala de Aula Módulo 3 Parte A Questões Conceituais QC.1) Suponha que somente duas forças externas atuem sobre um corpo rígido estacionário, e que elas são iguais em módulo e de direções opostas.
Questões em Sala de Aula Módulo 3 Parte A Questões Conceituais QC.1) Suponha que somente duas forças externas atuem sobre um corpo rígido estacionário, e que elas são iguais em módulo e de direções opostas.