ESTUDO DE UMA NOVA CONCEPÇÃO DE LINHA DE MANGOTES PARA TRANSFERÊNCIA DE ÓLEO NO MAR. Ana Paula dos Santos Costa
|
|
|
- Laura Fialho Fonseca
- 6 Há anos
- Visualizações:
Transcrição
1 ESTUDO DE UMA NOVA CONCEPÇÃO DE LINHA DE MANGOTES PARA TRANSFERÊNCIA DE ÓLEO NO MAR Ana Paula dos Santos Costa DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA OCEÂNICA. Aprovada por: Prof. Sergio Hamilton Sphaier, Dr.-Ing. Prof. Kazuo Nishimoto, Ph.D. Prof. Severino Fonseca da Silva Neto, D.Sc RIO DE JANEIRO, RJ - BRASIL SETEMBRO DE 2007
2 Livros Grátis Milhares de livros grátis para download.
3 COSTA, ANA PAULA DOS SANTOS Estudo de Uma Nova Concepção de Linha de Mangotes para Transferência de Óleo no Mar [Rio de Janeiro] 2007 XVII, 242p. 29,7cm (COPPE/UFRJ, M.Sc., Engenharia Oceânica, 2007) Dissertação - Universidade Federal do Rio de Janeiro, COPPE. 1. Projeto de Linha de Mangotes I. COPPE/UFRJ II. Título (série) ii
4 Aos meus pais, Paulo e Vera, pela vida, amor, apoio e principalmente pelo bom exemplo e orientação para a vida. iii
5 AGRADECIMENTOS Meus sinceros agradecimentos aos Professores Sergio Hamilton Sphaier e Kazuo Nishimoto pela orientação, paciência e amizade; aos Engenheiros Paulo Cesar Alves Dos Santos e Luiz Felipe Affonso Rolo pelas idéias e orientações práticas; ao Dr. Lino Francisco Moreira e ao Dr. Álvaro Maia da Costa, meus gerentes, por me apoiarem e criarem as condições necessárias para que eu pudesse realizar esta dissertação; e, em especial, minha gratidão ao Dr. Isaias Quaresma Masetti pela amizade e incentivo. iv
6 Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos necessários para a obtenção do grau de Mestre em Ciências (M.Sc.) ESTUDO DE UMA NOVA CONCEPÇÃO DE LINHA DE MANGOTES PARA TRANSFERÊNCIA DE ÓLEO NO MAR Ana Paula dos Santos Costa Setembro/2007 Orientador: Sergio Hamilton Sphaier Programa: Engenharia Oceânica Este trabalho desenvolve um estudo sobre o projeto e o comportamento dinâmico de linhas de mangotes para transferência de óleo no mar. Além disso, propõe-se uma nova configuração de linha de mangotes flutuante que minimize os efeitos dinâmicos nas conexões da linha de transferência com o Terminal e com o Navio Aliviador, de forma a reduzir os danos nos elementos da extremidade devidos às grandes acelerações e aos pequenos raios de curvatura aos quais a estrutura dos mangotes é submetida. v
7 Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the requirements for the degree of Master of Science (M.Sc.) STUDY OF A NEW CONCEPT OF A FLOATING HOSE LINE FOR OFFSHORE OIL TRANSFER Ana Paula dos Santos Costa September/2007 Advisor: Sergio Hamilton Sphaier Department: Ocean Engineering This work develops a study on the design and dynamic behavior of hose lines for offshore oil transfer. Moreover, a new configuration of floating hose line that minimizes the dynamic effect in the connections of the line of oil transfer to the Offshore Terminal and to the Shuttle Tanker is proposed. This conception reduces the damages in the elements of the extremity due to the great accelerations and the small bending radius which the structure of the hoses is submitted. vi
8 ÍNDICE DE CAPÍTULOS 1 INTRODUÇÃO 1 2 SISTEMA DE PRODUÇÃO E ESCOAMENTO DE ÓLEO NO MAR SISTEMA DE PRODUÇÃO SEM ARMAZENAMENTO SISTEMA DE ESCOAMENTO POR DUTOS SISTEMA DE ESCOAMENTO UTILIZANDO TERMINAIS OCEÂNICOS Monobóia Cisterna SISTEMA DE PRODUÇÃO COM ARMAZENAMENTO FPSO BASEADO EM CASCOS ESBELTOS Amarração em Ponto Único Amarração em Quadro de Ancoragem FPSO BASEADO EM MONOCOLUNA NAVIOS ALIVIADORES NAVIOS CONVENCIONAIS (PASSIVOS) NAVIOS COM POSICIONAMENTO DINÂMICO (DP) 17 3 CARACTERÍSTICAS DO SISTEMA DE TRANSFERÊNCIA DE ÓLEO POR LINHA DE MANGOTES ESTRUTURA DE MANGOTES CARCAÇA SIMPLES CARCAÇA DUPLA CAMADA DE FLUTUAÇÃO PRINCIPAIS COMPONENTES DE UMA LINHA DE MANGOTES MANGOTE PRINCIPAL (MAIN LINE) MANGOTE DE TERMINAÇÃO (TANKER END) MANGOTES DE TRANSIÇÃO COLARES DE FLUTUAÇÃO VÁLVULA DISCO DE EXTREMIDADE (NS VALVE) JUNTA ESFÉRICA (BALL JOINT) CARACTERÍSTICAS FÍSICAS DOS MANGOTES COMPRIMENTO DIÂMETRO NOMINAL DIÂMETRO EXTERNO 26 vii
9 3.3.4 PESO RESERVA DE FLUTUABILIDADE RIGIDEZ AXIAL (EA) RIGIDEZ FLEXIONAL (EI) RAIO MÍNIMO DE CURVATURA PRESSÃO EXTERNA ADMISSÍVEL COEFICIENTES HIDRODINÂMICOS SISTEMAS DE ACOPLAMENTO DA LINHA DE MANGOTES ARMAZENAMENTO DA LINHA DE MANGOTES 39 4 PROJETO DA LINHA DE TRANSFERÊNCIA CRITÉRIOS UTILIZADOS DEFINIÇÃO DE DIÂMETRO DEFINIÇÃO DO TIPO DE LINHA DIAGRAMA DE FLUXO DE PROJETO DEFINIÇÃO DO COMPRIMENTO CONDIÇÃO AMBIENTAL LIMITE 45 5 VANTAGENS E DESVANTAGENS DOS TIPOS DE LINHA LINHA DE MANGOTES SUBMARINA LINHA DE MANGOTES FLUTUANTE 47 6 PROPOSTA DE LINHA COM FLUTUAÇAO CONTROLADA 49 7 MODELO NUMÉRICO SOLUÇÃO DA LINHA POR ELEMENTOS FINITOS FORÇAS ATUANTES SOBRE A LINHA EQUILÍBRIO ESTÁTICO DA LINHA CONFIGURAÇÃO INICIAL DA LINHA (CATENÁRIA) MODELO DE MASSA CONCENTRADA ESFORÇOS INTERNOS RESISTENTES MOMENTOS FLETORES NODAIS EMPUXO (MODELO DE EMPUXO CONCENTRADO) FORÇA DE CORRENTEZA 59 viii
10 7.3.7 PARCELA ESTÁTICA DE ONDA CÁLCULO DA DINÂMICA DA LINHA CARGA DINÂMICA DE ONDA DINÂMICA IMPOSTA NAS EXTREMIDADES 60 8 ANÁLISES NUMÉRICAS CENÁRIO ESCOLHIDO CONFIGURAÇÕES ANALISADAS LINHA ESTIVADA (DURANTE ARMAZENAMENTO NO MAR) LINHA EM ABANDONO (DURANTE ABANDONO NO MAR) LINHA EM OFFLOADING (DURANTE TRANSFERÊNCIA DE ÓLEO) DEFINIÇÃO DA CONFIGURAÇÃO DAS LINHAS MODELADAS TIPOS DE MANGOTES UTILIZADOS DIMENSIONAMENTO DA LINHA PROPOSTA SIMULAÇÕES - LINHA EM ABANDONO Travado Sem correnteza Onda (2,5m; 9,3s; G2,14) Travado Sem correnteza Onda (3,375m; 9,3s; G2,14) Travado Correnteza 2,1 m/s Onda (3,375m; 9,3s; G2,14) Movimento Imposto C= 2,1 m/s O= (3,375m; 9,3s; G2,14) SIMULAÇÕES - LINHA ESIVADA Travado Sem correnteza Onda (2,5m; 9,3s; G2,14) Travado Sem correnteza Onda (4m; 12,5s; G1,8) Travado Correnteza 2,1m/s Onda (4m; 12,5s; G1,8) Movimento Imposto C= 2,1 m/s O= (4m; 12,5s; G1,8) SIMULAÇÕES - LINHA EM OFFLOADING L=90m - Travado Sem correnteza O= (3,375m; 9,3s; G2,14) L=150m - Travado sem Correnteza O= (3,375m; 9,3s; G2,14) L=90m - Travado C= 1,1m/s O= (3,375m; 9,3s; G2,14) L=150m - Travado C= 1,1 m O= (3,375m; 9,3s; G2,14) L=150m Mov.Imposto C= 1,1 m O=(3,375m; 9,3s; G2,14) 98 9 ENSAIOS COM MODELO REDUZIDO DESCRIÇÃO DO TANQUE INSTRUMENTAÇÃO MODELOS E CONFIGURAÇÕES ENSAIADAS CONDIÇÕES ENSAIADAS 107 ix
11 9.5 RESULTADOS OBTIDOS ONDA TRANSIENTE CONFIGURAÇÃO ESTIVADA CONFIGURAÇÃO EM OFFLOADING CONFIGURAÇÃO EM ABANDONO NO MAR CONCLUSÕES E RECOMENDAÇÕES ANEXO METODOLOGIA DE CÁLCULO NUMÉRICO GERAÇÃO DO MODELO GERAÇÃO DA MALHA ANÁLISE NUMÉRICA Formulação Básica Algoritmos de Integração Modelagem Física Modelo de Massa Concentrada (Lumped mass) Modelo de Empuxo Concentrado Esforço Interno Resistente Forças hidrodinâmicas Consideração de Momentos Fletores Nodais CARGAS AMBIENTAIS Corrente Onda Modelação Estatística de um Estado de Mar Elevação da superfície do mar Simulação da Elevação do Mar a partir de um Espectro Determinação de Condição Extrema para Projeto GERAÇÃO DOS MOVIMENTOS IMPOSTOS PELAS EMBARCAÇÕES ANEXO FORÇAS HIDRODINÂMICAS CÁLCULO DOS ESFORÇOS NAS LINHAS ONDAS DE GRAVIDADE Teoria Linear de Airy Forças Geradas na Estrutura Induzidas pelas Ondas Modelo de Difração / Radiação Formulação de Morison 169 x
12 Formulação de Froude-Krylov CÁLCULO DOS ESFORÇOS SOBRE A LINHA DE MANGOTES FORÇAS HIDRODINÂMICAS DEVIDAS ÀS ONDAS SOBRE UM CILINDRO ESBELTO COEFICIENTES HIDRODINÂMICOS Coeficiente de Arrasto Coeficiente de Inércia Considerações Práticas sobre os Coeficientes de Arrasto e Inércia ANEXO SIMILARIDADE ENTRE MODELO E PROTÓTIPO SIMILARIDADE CINEMÁTICA SIMILARIDADE DINÂMICA DISCREPÂNCIAS QUE APARECEM NOS TESTES EM ÁGUA ANEXO SÉRIES TEMPORAIS DE ENSAIOS EM ESCALA REDUZIDA CONFIGURAÇÃO ESTIVADA Séries Temporais com Variação de Correnteza Séries Temporais com Variação de Altura de Onda Séries Temporais com e sem Imposição de Movimento CONFIGURAÇÃO EM OFFLOADING Séries Temporais com Variação de Correnteza Séries Temporais com e sem Imposição de Movimento CONFIGURAÇÃO EM ABANDONO Séries Temporais com Variação de Correnteza Séries Temporais com Variação de Altura de Onda Séries Temporais com e sem Imposição de Movimento REFERÊNCIAS BIBLIOGRÁFICAS 239 xi
13 ÍNDICE DE FIGURAS: FIGURA 1-1: CONECTOR DA LINHA DE MANGOTES AO F(P)SO... 2 FIGURA 1-2: REGIÃO DA LINHA DE MANGOTES SUJEITA A DANOS DEVIDOS A DOBRAMENTOS... 2 FIGURA 2-1: PLATAFORMAS FIXAS DE PRODUÇÃO... 4 FIGURA 2-2: PLATAFORMAS FLUTUANTES DE PRODUÇÃO... 5 FIGURA 2-3: SISTEMA COM ESCOAMENTO DE ÓLEO POR OLEODUTO... 6 FIGURA 2-4: SISTEMA COM ESCOAMENTO ATRAVÉS DE MONOBÓIAS E NT ALIVIADOR... 7 FIGURA 2-5: SISTEMA COM ARMAZENAMENTO EM FSO E ESCOAMENTO POR NT ALIVIADOR... 8 FIGURA 2-6: EXEMPLO DE NAVIO TANQUE CONVERTIDO PARA FPSO SHIP-SHAPED (P-35) FIGURA 2-7: EXEMPLO DE CASCO CONSTRUÍDO PARA SER FPSO BOX-SHAPED (GIRASSOL) FIGURA 2-8: ALINHAMENTO COM A RESULTANTE DAS CARGAS AMBIENTAIS FIGURA 2-9: TURRET EXTERNO FIGURA 2-10: TURRET INTERNO CONVENCIONAL FIGURA 2-11: TURRET INTERNO DESACOPLÁVEL FIGURA 2-12: SISTEMAS RÍGIDOS EM RELAÇÃO AO APROAMENTO FIGURA 2-13: EXEMPLOS DE MONOCOLUNAS FIGURA 2-14: GERAÇÕES DE NAVIOS ALIVIADORES FIGURA 2-15: PRINCIPAIS TIPOS DE PROPULSORES AUXILIARES PARA DP FIGURA 3-1: ESTRUTURA BÁSICA DE UM MANGOTE SUBMARINO DE CARCAÇA SIMPLES FIGURA 3-2: ESTRUTURA BÁSICA DE UM MANGOTE SUBMARINO DE CARCAÇA DUPLA FIGURA 3-3: ESTRUTURA BÁSICA DE MANGOTES FLUTUANTES (CARCAÇA SIMPLES E DUPLA) FIGURA 3-4: TANKER END CONECTADO À MEIA-NAU FIGURA 3-5: MANGOTES DE TRANSIÇÃO DE DIÂMETRO INTERNO FIGURA 3-6: MANGOTES DE TRANSIÇÃO DE FLUTUABILIDADE FIGURA 3-7: VISTA DE PERSPECTIVA E EXEMPLO DE USO DE COLARES DE FLUTUAÇÃO FIGURA 3-8: VÁLVULA DISCO DE EXTREMIDADE DE LINHA DE MANGOTES (NS VALVE) FIGURA 3-9: VÁLVULA ESFÉRICA (GRAUS DE LIBERDADE) FIGURA 3-10: TESTES PARA OBTENÇÃO DA RIGIDEZ FLEXIONAL (EI) FIGURA 3-11: COEFICIENTE DE ARRASTO DE UM CILINDRO INFINITO SUBMERSO FIGURA 3-12: CONTRIBUIÇÃO DA PARCELA DE PRESSÃO E DE FRICÇÃO NO ARRASTO FIGURA 3-13: C D E C M COMO FUNÇÃO DE KC, PARA UM CILINDRO LONGO COM Β = RE / KC = FIGURA 3-14: C D E C M COMO FUNÇÃO DE Β = RE / KC, PARA UM CILINDRO LONGO COM KC = [Π, 2Π]34 FIGURA 3-15: AFUNDAMENTO PROVOCADO PELO C L FIGURA 3-16: CONEXÃO DO NT ALIVIADOR AO F(P)SO FIGURA 3-17: BLS (BOW LOADING SYSTEM) - DETALHE NO SISTEMA DE ACOPLAMENTO FIGURA 3-18: CONEXÃO À MEIA-NAU COM AUXÍLIO DE EMBARCAÇÃO DE APOIO FIGURA 3-19: ARMAZENAMENTO DA LINHA DE MANGOTES EM UMA CALHA COM ROLETES FIGURA 3-20: ARMAZENAMENTO DA LINHA DE MANGOTES ENROLADA EM UM CARRETEL FIGURA 4-1: RELAÇÃO VELOCIDADE X VAZÃO xii
14 FIGURA 4-2: ESQUEMA COM AS DISTÂNCIAS PRINCIPAIS NO CÁLCULO DO COMPRIMENTO MÍNIMO DA LINHA DE MANGOTES FIGURA 5-1: SISTEMA DE TRANSFERÊNCIA COM LINHA SUBMARINA FIGURA 5-2: SISTEMA DE TRANSFERÊNCIA COM LINHA FLUTUANTE FIGURA 5-3: GEOMETRIA DA LINHA DE MANGOTES FLUTUANTE SOB AÇÃO DAS ONDAS FIGURA 5-5: REGIÕES CRÍTICAS A DANOS DA LINHA DE MANGOTES FLUTUANTES FIGURA 6-1: ABSORÇÃO DOS MOVIMENTOS DO TERMINAL E DAS ONDAS SOBRE A PARTE FLUTUANTE DAS LINHAS PELA FORMA DA CATENÁRIA DA EXTREMIDADE FIGURA 7-1: ELEMENTO DE TRELIÇA E ESFORÇOS CONSIDERADOS FIGURA 7-2: MODELO DE CATENÁRIA UTILIZADO PARA GERAÇÃO DA MALHA FIGURA 7-3: MODELO DE MASSA CONCENTRADA FIGURA 7-4: ESFORÇOS INTERNOS RESISTENTES FIGURA 7-5: CURVATURAS E MOMENTOS FLETORES FIGURA 7-6: ESQUEMA DE EQUILÍBRIO ENTRE PESO E EMPUXO NOS NÓS FIGURA 7-7: CONSIDERAÇÃO DO EMPUXO, MASSA E OUTRAS FORÇAS SOBRE O ELEMENTO FIGURA 7-8: CÁLCULO DO EMPUXO BASEADO NA PARCELA SUBMERSA DO SUB-NÓ FIGURA 8-1: CONFIGURAÇÃO DA LINHA ESTIVADA E CONEXÃO NO F(P)SO FIGURA 8-2: COLAPSO PROGRESSIVO DA LINHA DE MANGOTES FIGURA 8-3: CONFIGURAÇÃO DE LINHA ABANDOADA NO MAR FIGURA 8-4: DISTÂNCIAS LIMITE ENTRE OS PONTOS DE CONEXÃO DA LINHA (OFFLOADING) FIGURA 8-5: LINHA DE MANGOTES PROPOSTA (FLUTUABILIDADE CONTROLADA) FIGURA 8-6: LINHA DE MANGOTES CONVENCIONAL (TOTALMENTE FLUTUANTE) FIGURA 8-7: EQUILÍBRIO ESTÁTICO DAS LINHAS (CALADO MÁXIMO DO F(P)SO) FIGURA 8-8: EQUILÍBRIO ESTÁTICO DAS LINHAS (CALADO MÍNIMO DO F(P)SO) FIGURA 8-9: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (C = 2,1M/S HS 7,8M; TP 16S; G 2,2) FIGURA 8-10: TRAÇÃO NA CONEXÃO AFIXADA AO F(P)SO, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (C = 2,1M/S HS 7,8M; TP 16S; G 2,2) FIGURA 8-11: RASTRO DE MOVIMENTOS DE AMBAS AS LINHAS PRÓXIMO AO F(P)SO (C = 2,1M/S HS 7,8M; TP 16S; G 2,2) FIGURA 8-12: RASTRO DE MOVIMENTOS DE AMBAS AS LINHAS PRÓXIMO AO F(P)SO (SEM CORRENTEZA HS 7,8M; TP 16S; G 2,2) FIGURA 8-13: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (SEM CORRENTEZA HS 7,8M; TP 16S; G 2,2) FIGURA 8-14: TRAÇÃO NA CONEXÃO AFIXADA AO F(P)SO, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (SEM CORRENTEZA HS 7,8M; TP 16S; G 2,2) FIGURA 8-15: PROFUNDIDADES DAS LINHAS DE MANGOTES AO LONGO DO COMPRIMENTO NA SITUAÇÃO DE ONDA CENTENÁRIA FIGURA 8-16: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (SEM CORRENTEZA HS 2,5M; TP 9,3S; G 2,14) xiii
15 FIGURA 8-17: TRAÇÃO NA CONEXÃO AFIXADA AO F(P)SO, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (SEM CORRENTEZA HS 2,5M; TP 9,3S; G 2,14) FIGURA 8-18: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (SEM CORRENTEZA HS 3,375M; TP 9,3S; G 2,14) FIGURA 8-19: TRAÇÃO NA CONEXÃO AFIXADA AO F(P)SO, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (SEM CORRENTEZA HS 3,375M; TP 9,3S; G 2,14) FIGURA 8-20: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (CORRENTEZA 2,1 M/S HS 3,375M; TP 9,3S; G 2,14) FIGURA 8-21: TRAÇÃO NA CONEXÃO AFIXADA AO F(P)SO, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (CORRENTEZA 2,1 M/S HS 3,375M; TP 9,3S; G 2,14) FIGURA 8-22: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (MOV.IMP.- C 2,1 M/S HS 3,375M; TP 9,3S; G 2,14) FIGURA 8-23: TRAÇÃO NA CONEXÃO AFIXADA AO F(P)SO, NA CONFIGURAÇÃO COM A NS VALVE ABANDONADA NO MAR (MOV.IMP.- C 2,1 M/S HS 3,375M; TP 9,3S; G 2,14) FIGURA 8-24: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO ESTIVADA NO MAR (SEM CORRENTEZA HS 2,5M; TP 12,5S; G 1,8) FIGURA 8-25: TRAÇÃO NA CONEXÃO SEMPRE AFIXADA AO F(P)SO, NA CONFIGURAÇÃO ESTIVADA NO MAR (SEM CORRENTEZA HS 2,5M; TP 12,5S; G 1,8) FIGURA 8-26: TRAÇÃO NA CONEXÃO COM NS VALVE, NA CONFIGURAÇÃO ESTIVADA NO MAR (SEM CORRENTEZA HS 2,5M; TP 12,5S; G 1,8) FIGURA 8-27: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO ESTIVADA NO MAR (SEM CORRENTEZA HS 4M; TP 12,5S; G 1,8) FIGURA 8-28: TRAÇÃO NA CONEXÃO SEMPRE AFIXADA AO F(P)SO, NA CONFIGURAÇÃO ESTIVADA NO MAR (SEM CORRENTEZA HS 4M; TP 12,5S; G 1,8) FIGURA 8-29: TRAÇÃO NA CONEXÃO COM NS VALVE, NA CONFIGURAÇÃO ESTIVADA NO MAR (SEM CORRENTEZA HS 4M; TP 12,5S; G 1,8) FIGURA 8-30: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO ESTIVADA NO MAR (CORRENTEZA 2,1M/S HS 4M; TP 12,5S; G 1,8) FIGURA 8-31: REGIÃO DA LINHA ESTIVADA COM GRANDE CURVATURA SOB CORRENTEZA FIGURA 8-32: TRAÇÃO NA CONEXÃO SEMPRE AFIXADA AO F(P)SO, NA CONFIGURAÇÃO ESTIVADA NO MAR (CORRENTEZA 2,1M/S HS 4M; TP 12,5S; G 1,8) FIGURA 8-33: TRAÇÃO NA CONEXÃO COM NS VALVE, NA CONFIGURAÇÃO ESTIVADA NO MAR (CORRENTEZA 2,1M/S HS 4M; TP 12,5S; G 1,8) FIGURA 8-34: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO ESTIVADA NO MAR (MOV. IMP. - C 2,1 M/S HS 4M; TP 12,5S; G 1,8) FIGURA 8-35: TRAÇÃO NA CONEXÃO SEMPRE AFIXADA AO F(P)SO, NA CONFIGURAÇÃO ESTIVADA NO MAR (MOV.IMP.- C 2,1 M/S HS 4M; TP 12,5S; G 1,8) FIGURA 8-36: TRAÇÃO NA CONEXÃO COM NS VALVE, NA CONFIGURAÇÃO ESTIVADA NO MAR (MOV.IMP.- C 2,1 M/S HS 4M; TP 12,5S; G 1,8) xiv
16 FIGURA 8-37: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=90 M - C 0 M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-38: TRAÇÃO NA CONEXÃO DO F(P)SO, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=90 M - C 0 M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-39: TRAÇÃO NA CONEXÃO COM O NT ALIVIADOR NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=90 M - C 0 M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-40: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=150 M - C 0 M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-41: TRAÇÃO NA CONEXÃO DO F(P)SO, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=150 M - C 0 M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-42: TRAÇÃO NA CONEXÃO COM O NT ALIVIADOR NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=150 M - C 0 M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-43: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=90 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-44: CURVATURA DAS LINHAS DE MANGOTES DURANTE OFFLOADING (L=90 M) FIGURA 8-45: TRAÇÃO NA CONEXÃO DO F(P)SO, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=90 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-46: TRAÇÃO NA CONEXÃO COM O NT ALIVIADOR NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=90 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-47: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=150 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-48: CURVATURA DAS LINHA DE MANGOTES DURANTE OFFLOADING (L=150 M) FIGURA 8-49: TRAÇÃO NA CONEXÃO DO F(P)SO, NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=150 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-50: TRAÇÃO NA CONEXÃO COM O NT ALIVIADOR NA CONFIGURAÇÃO EM OFFLOADING (TRAVADO- L=150 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-51: CURVATURA AO LONGO DAS LINHAS ESTUDADAS, NA CONFIGURAÇÃO EM OFFLOADING (MOV. IMPOSTO - L=150 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-52: TRAÇÃO NA CONEXÃO DO F(P)SO, NA CONFIGURAÇÃO EM OFFLOADING (MOV. IMPOSTO - L=150 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 8-53: TRAÇÃO NA CONEXÃO COM O NT ALIVIADOR NA CONFIGURAÇÃO EM OFFLOADING (MOV. IMPOSTO - L=150 M - C=1,1M/S HS 3,375M; TP 12,5S; G 2,14) FIGURA 9-1: TANQUE DE REBOQUE DO IPT FIGURA 9-2: DETALHE DA INSTRUMENTAÇÃO FIGURA 9-3: ARRANJOS DAS DIFERENTES CONDIÇÕES DE LINHAS ENSAIADAS NO CARRO DINAMOMÉTRICO DO TANQUE DE PROVAS FIGURA 9-4: MODELO DO MANGOTE E DO FLANGE FIGURA 9-5: FIGURA ESQUEMÁTICA DA CONFIGURAÇÃO ESTIVADA FIGURA 9-6: MODELO DA CONFIGURAÇÃO ESTIVADA FIGURA 9-7: FIGURA ESQUEMÁTICA DA CONFIGURAÇÃO EM ABANDONO xv
17 FIGURA 9-8: MODELO DA CONFIGURAÇÃO EM ABANDONO FIGURA 9-9: FIGURA ESQUEMÁTICA DA CONFIGURAÇÃO EM OFFLOADING FIGURA 9-10: ESTIMATIVA DE CURVA DE REPOSTA - TRANSIENTE FIGURA 10-1: PRINCIPAIS PONTOS DE ATENÇÃO DA LINHA FIGURA 10-2: PRESSÃO EXTERNA DO MAR SOBRE O MANGOTE FIGURA 10-3: LINHA COM APÊNDICES DE FLUTUAÇÃO FIGURA 11-1: MODELO ESQUEMÁTICO DE CATENÁRIA UTILIZADO PARA GERAÇÃO DA MALHA FIGURA 11-2: ALGORITMO EXPLÍCITO - DISSIPAÇÃO NUMÉRICA ÓTIMA (HULBERT E CHUNG) FIGURA 11-3: ELEMENTO FINITO ADOTADO E ESFORÇOS CONSIDERADOS FIGURA 11-4: CONSIDERAÇÃO DO EMPUXO E DA MASSA DO ELEMENTO FIGURA 11-5: CURVATURAS E MOMENTOS FLETORES FIGURA 11-6: ENSAIO COM MODELO REDUZIDO NAVIOS EM TANDEM FIGURA 12-1: PERFIL DE UMA ONDA REGULAR PROGRESSIVA FIGURA 12-2: PONTOS DE VELOCIDADE HORIZONTAL MÁXIMA, MÍNIMA E NULA FIGURA 12-3: PONTOS DE VELOCIDADE VERTICAL MÁXIMA, MÍNIMA E NULA FIGURA 12-4: PERFIL DE VELOCIDADES DA ONDA, PARA O TEMPO T= FIGURA 12-5: PONTOS DE ACELERAÇÃO HORIZONTAL MÁXIMA, MÍNIMA E NULA FIGURA 12-6: PONTOS DE ACELERAÇÃO VERTICAL MÁXIMA, MÍNIMA E NULA FIGURA 12-7: VISUALIZAÇÃO DAS ÓRBITAS DAS PARTÍCULAS FLUIDAS FIGURA 12-8: EFEITO DO RAIO DE CURVATURA E DA RUGOSIDADE NO C D DE CORPOS BIDIMENSIONAIS FIGURA 12-9: REGIME DE FLUXO DE UM FLUIDO REAL EM TORNO DE UMA SEÇÃO CILÍNDRICA [53] 182 FIGURA 13-1: ESCOAMENTOS SEM ATRITO E DE BAIXA VELOCIDADE FIGURA 13-2: SIMILARIDADE DINÂMICA DE FLUXO HIDRÁULICO ATRAVÉS DE BARREIRA COM ABERTURA INFERIOR. (A) PROTÓTIPO; (B) MODELO FIGURA 13-3: EXTRAPOLAÇÕES DO NÚMERO DE REYNOLDS, OU ESCALAMENTO DOS DADOS HIDRODINÂMICOS PARA SISTEMAS COM O MESMO NÚMERO DE FROUDE FIGURA 13-4: MODELO HIDRÁULICO DE UM CANAL DE GRANDE ÁREA COM PEQUENA PROFUNDIDADE xvi
18 ÍNDICE DE TABELAS: TABELA 8-1: PROPRIEDADES DOS MANGOTES UTILIZADOS NAS SIMULAÇÕES TABELA 9-1: CARACTERÍSTICAS DOS TIPOS DE MANGOTES ENSAIADOS (ESCALA 1:25) TABELA 9-2: CONFIGURAÇÃO ESTIVADA - CONDIÇÕES ENSAIADAS TABELA 9-3: CONFIGURAÇÃO EM OFFLOADING - CONDIÇÕES ENSAIADAS TABELA 9-4: CONFIGURAÇÃO EM ABANDONO - CONDIÇÕES ENSAIADAS TABELA 9-5: CONFIGURAÇÃO ESTIVADA RESULTADOS DE TRAÇÃO DA EXTREMIDADE TABELA 9-6: CONFIGURAÇÃO ESTIVADA RESULTADOS DE ÂNGULO DA EXTREMIDADE TABELA 9-7: HISTOGRAMAS DE TRAÇÃO NA CONFIGURAÇÃO ESTIVADA TABELA 9-8: HISTOGRAMAS DE ÂNGULO COM A VERTICAL NA CONFIGURAÇÃO ESTIVADA TABELA 9-9: SÉRIES TEMPORAIS DE TRAÇÃO COM VARIAÇÃO DE CORRENTEZA TABELA 9-10: SÉRIES TEMPORAIS DE ÂNGULO COM VARIAÇÃO DE CORRENTEZA TABELA 9-11: SÉRIES TEMPORAIS DE TRAÇÃO COM E SEM IMPOSIÇÃO DE MOVIMENTO TABELA 9-12: SÉRIES TEMPORAIS DE ÂNGULO COM E SEM IMPOSIÇÃO DE MOVIMENTO TABELA 9-13: CONFIGURAÇÃO EM OFFLOADING RESULTADOS DE TRAÇÃO DA EXTREMIDADE TABELA 9-14: CONFIGURAÇÃO EM OFFLOADING RESULTADOS DE ÂNGULO DA EXTREMIDADE TABELA 9-15: HISTOGRAMAS DE TRAÇÃO NA CONFIGURAÇÃO EM OFFLOADING TABELA 9-16: HISTOGRAMAS DE ÂNGULO NA CONFIGURAÇÃO EM OFFLOADING TABELA 9-17: SÉRIES TEMPORAIS DE TRAÇÃO COM VARIAÇÃO DE CORRENTEZA TABELA 9-18: SÉRIES TEMPORAIS DE ÂNGULO COM VARIAÇÃO DE CORRENTEZA TABELA 9-19: SÉRIES TEMPORAIS DE TRAÇÃO COM E SEM IMPOSIÇÃO DE MOVIMENTO TABELA 9-20: SÉRIES TEMPORAIS DE ÂNGULO COM E SEM IMPOSIÇÃO DE MOVIMENTO TABELA 9-21: CONFIGURAÇÃO EM ABANDONO RESULTADOS DE TRAÇÃO DA EXTREMIDADE TABELA 9-22: CONFIGURAÇÃO EM ABANDONO RESULTADOS DE ÂNGULO DA EXTREMIDADE TABELA 9-23: HISTOGRAMAS DE TRAÇÃO NA CONFIGURAÇÃO EM ABANDONO NO MAR TABELA 9-24: HISTOGRAMAS DE ÂNGULO NA CONFIGURAÇÃO EM ABANDONO NO MAR TABELA 9-25: SÉRIES TEMPORAIS DE TRAÇÃO COM VARIAÇÃO DE CORRENTEZA TABELA 9-26: SÉRIES TEMPORAIS DE ÂNGULO COM VARIAÇÃO DE CORRENTEZA TABELA 9-27: SÉRIES TEMPORAIS DE TRAÇÃO COM E SEM IMPOSIÇÃO DE MOVIMENTO TABELA 9-28: SÉRIES TEMPORAIS DE ÂNGULO COM E SEM IMPOSIÇÃO DE MOVIMENTO TABELA 12.1: CONSIDERAÇÃO PARA ÁGUAS RASAS, INTERMEDIÁRIAS E PROFUNDAS TABELA 12.2: VALORES SUGERIDOS DE C D TABELA 12.3: ADIMENSIONAIS QUE INFLUENCIAM NO COEFICIENTE DE ARRASTO TABELA 12.4: VALORES DO COEFICIENTE DE ARRASTO PARA O MODELO (ESCALA REDUZIDA) TABELA 12.5: VALORES DO COEFICIENTE DE ARRASTO PARA O PROTÓTIPO (ESCALA REAL) TABELA 12.6: VALORES TÍPICOS PARA O COEFICIENTE DE ARRASTO EM FUNÇÃO DO NÚMERO DE REYNOLDS xvii
19 1 INTRODUÇÃO Atualmente, grande parte da produção de óleo na costa brasileira é feita no mar, em águas profundas. Neste caso, por se tratar de um cenário distante da costa, o escoamento por dutos submarinos se torna inviável em muito dos casos. Para viabilizar a produção, utiliza-se de armazenamento do óleo produzido em unidades flutuantes no mar, com alívio periódico feito por navio tanque chamado NT Aliviador. A transferência de óleo é feita através de linha de mangotes, que podem ser flutuantes ou submarinas, em forma de catenária. A linha de mangotes pode ser armazenada sobre o casco do F(P)SO ou, no caso das linhas flutuantes, podem ser armazenadas flutuando no mar. No caso da linha ser armazenada no mar, uma de suas extremidades fica constantemente conectada ao F(P)SO e outra é móvel para que, durante a transferência de óleo fique conectada ao NT Aliviador e durante a espera fique conectada ao F(P)SO. Esta extremidade móvel possui uma válvula de vedação que impede o vazamento do óleo durante a desconexão. A conexão móvel da linha é acoplada ao casco do F(P)SO por um conector, dotado de uma válvula similar à da extremidade da linha, presa a uma junta esférica, conforme Figura 1-1. Este conector do F(P)SO possui um sistema de engate, com algumas garras que permitem o acoplamento da válvula da extremidade da linha de mangotes. 1

SO também provocam grandes dobramentos nas extremidades da linha, onde esta passa da região na água para a")
20 Figura 1-1: Conector da Linha de Mangotes ao F(P)SO Devido aos movimentos dinâmicos relativos entre o F(P)SO e a linha de mangotes flutuante, observa-se um excessivo desgaste da conexão, podendo ocorrer danos às garras de acoplamento e, com isso, um conseqüente desacoplamento. Neste caso, a linha permanecerá em abandono no mar até que esta conexão seja reparada. A dinâmica da linha de mangotes e do F(P)SO também provocam grandes dobramentos nas extremidades da linha, onde esta passa da região na água para a região suspensa. Figura 1-2: Região da Linha de Mangotes Sujeita a Danos Devidos a Dobramentos 2
21 De forma a evitar os dois inconvenientes, esta dissertação propõe a utilização de uma forma híbrida das duas concepções anteriores, de tal forma a se utilizarem trechos em catenária, com pouca flutuação, nas extremidades e um trecho intermediário flutuante, mantendo a característica de ser uma linha flutuante, que se auto-sustenta, sem afundar, quando abandonada no mar. A utilização de pouca flutuabilidade nas extremidades da linha melhora o ângulo de chegada da mesma, como também isola a ação do movimento da superfície do mar sobre este segmento da linha, minimizando a dinâmica das extremidades, preservando assim o conector e os elementos de mangotes desta região. 3


22 2 SISTEMA DE PRODUÇÃO E ESCOAMENTO DE ÓLEO NO MAR O objetivo deste capítulo é descrever os sistemas de produção e exportação de óleo no mar para melhor compreensão da importância do uso da linha de mangotes. 2.1 SISTEMA DE PRODUÇÃO SEM ARMAZENAMENTO Existem vários tipos de unidades de produção e processamento de petróleo sem armazenamento. Os tipos mais comuns são as Jaquetas, Torres Complacentes, plataformas fixas representadas nas Figura 2-1 e as Semi-submesíveis, TLPs, SPARs e Monocolunas, plataformas flutuantes representadas nas Figura Jaqueta Torre Complacente Figura 2-1: Plataformas Fixas de Produção 4





23 Semi-Submersível TLP SPAR Monocoluna Figura 2-2: Plataformas Flutuantes de Produção 5
24 Por não serem dotadas de tanques de armazenamento, estas unidades escoam o óleo processado por meio de dutos submarinos Sistema de Escoamento por Dutos Em campos próximos à costa os dutos escoam o óleo diretamente da Unidade Estacionária de Produção (UEP) para os terminais marítimos/terrestres (Figura 2-3). Gasoduto Oleoduto Figura 2-3: Sistema com Escoamento de Óleo por Oleoduto Sistema de Escoamento Utilizando Terminais Oceânicos Campos com grandes distâncias da costa ou com alguma impossibilidade técnica de escoamento por dutos diretamente para os terminais marítimos/terrestres utilizam terminais oceânicos como ponto onde um Navio Tanque recebe o óleo através de uma linha de mangotes e navega até os terminais na costa. Os terminais podem ser do tipo monobóia ou FSO. 6

25 Monobóia A Monobóia é uma bóia de grandes dimensões ancorada ao fundo do mar por linhas de ancoragem em catenária (Sistema CALM - Catenary Anchor Leg Moorings) que atuava originalmente apenas como terminal de apoio em portos não preparados para o recebimento de grandes navios petroleiros para carga e descarga. Da mesma forma este sistema se tornou bastante atrativo para ser usado como terminal seguro de transferência do óleo produzido offshore para o navio aliviador. Neste caso o óleo é recebido pela monobóia por dutos e transferido para o navio por meio de linha de mangotes para o centro do corpo principal da monobóia, que abriga um condutor giratório, essencial para a transferência de produtos fluidos entre as partes rotativas e não rotativas da bóia. Para que a transferência do óleo para o NT Aliviador seja contínua, o sistema deve contar com duas monobóias e para que um navio possa desconectar de uma monobóia o outro já deve estar conectado e ter iniciado a transferência (Figura 2-4) Gasoduto Monobóia Linha de Mangotes Aliviador Figura 2-4: Sistema com Escoamento Através de Monobóias e NT Aliviador 7
26 Cisterna Os Terminais do tipo Cisterna são geralmente chamados FSOs (Floating Storage Offloading). Estes atuam como um grande pulmão de armazenamento do óleo produzido pela UEP e transferem periódicamente este óleo armazenado para o NT Aliviadorecessita ser contínua, viabilizando assim a utilização de apenas um navio, pois quando este está em viagem para a costa o óleo é armazenado nos tanques de carga do FSO (Figura 2-5). O casco e os sistemas de ancoragem e offloading dos FSOs são praticamente iguais aos dos FPSOs, e serão descritos no Capítulo 2.2. Gasoduto FSO Linha de Mangotes Aliviador Figura 2-5: Sistema com Armazenamento em FSO e Escoamento por NT Aliviador 8
27 2.2 SISTEMA DE PRODUÇÃO COM ARMAZENAMENTO Em locais distantes da costa, a utilização de unidades com armazenamento e exportação de óleo por navios tende a ser técnica e economicamente mais atrativa que a exportação por dutos. Isto se deve a um custo de capital muito elevado na instalação dos dutos e a problemas de escoamento devido às baixas temperaturas no fundo do mar que estes estão submetidos. Neste caso, utilizam-se terminais oceânicos, dotados de armazenamento e planta de processamento de óleo, denominados FPSO (Floating Production Storage and Offloading). Este tipo de UEP pode ser baseada em cascos esbeltos ou em monocolunas e o offloading do óleo é feito através de linha de mangotes para o NT Aliviador. 9

.")
28 2.2.1 FPSO Baseado em Cascos Esbeltos Em geral estes cascos são conversões de navios convencionais (ship-shaped) usados ou novos, que são reforçados para receber as linhas de produção, ancoragem e planta de processo. Figura 2-6: Exemplo de Navio Tanque Convertido para FPSO Ship-Shaped (P- 35) Atualmente a tendência é que os FPSOs baseados em cascos novos utilizem cascos em forma de caixa (box-shaped). Por serem unidades estacionárias, não destinadas à navegação, estes cascos podem ter formas simplificadas para a construção, se aproximando das formas de uma balsa. Figura 2-7: Exemplo de Casco Construído para ser FPSO Box-Shaped (Girassol) 10
29 Basicamente, dois tipos de sistemas de ancoragem são utilizados nas estruturas flutuantes baseadas em casco esbelto: amarração em ponto único e quadro de ancoragem Amarração em Ponto Único As amarrações em ponto único - SPM (Single Point Mooring) - permitem que a embarcação se alinhe com a direção de incidência das cargas ambientais, conforme a Figura 2-8, tornando mínima a resultante das cargas atuantes sobre o navio. O NT Aliviador geralmente é conectado à popa do F(P)SO e tende a acompanhar o aproamento deste. Figura 2-8: Alinhamento com a Resultante das Cargas Ambientais A amarração com turret (torreta), consiste em um sistema de amarração cujas linhas de ancoragem e os risers estão conectados ao turret, que é um sistema dotado de mancais que permitem que este fique solidário ao solo marinho, viabilizando a chegada dos risers e linhas de ancoragem, e o navio gire ao seu redor, alinhando-se à resultante das condições ambientais. O óleo é transferido do turret para o navio através de tubulações dotadas de destorcedores (swivels). 11
 ou internamente à embarcação (Figura")



30 O turret pode ser montado externamente à proa ou à popa da embarcação com reforços apropriados (Figura 2-9) ou internamente à embarcação (Figura 2-10). A mesa de amarras pode estar localizada abaixo ou acima da superfície da água. CONEXÃO ESTRUTURAL SUPERIOR UNIDADE FLUTUANTE DE ARMAZENAMENTO TURRET VERTICAL CONEXÃO INFERIOR COM A ESTRUTURA LINHAS DE ANCORAGEM Figura 2-9: Turret Externo SWIVEL PAREDES DO POÇO DOTURRET TURRET VERTICAL CONEXÃO ESTRUTURAL INFERIOR MESA DE AMARRAS LINHAS DE ANCORAGEM Figura 2-10: Turret Interno Convencional 12
 e é bastante interessante em sistemas onde as condições ambientais são muito severas.")

31 Um novo tipo de SPM, baseado em turret interno, permite a desconexão das linhas com o navio (Figura 2-11) e é bastante interessante em sistemas onde as condições ambientais são muito severas. Neste caso é interessante que o F(P)SO possua propulsão para que durante a passagem de um furacão ele possa desconectar e navegar para um local abrigado. Figura 2-11: Turret Interno Desacoplável 13
32 Amarração em Quadro de Ancoragem O princípio básico do quadro de ancoragem é ter pouca ou muito pouca mudança no aproamento para permitir o recebimento de uma grande quantidade de risers diretamente conectados ao costado do FPSO. Basicamente são dois os sistemas baseados em quadro de ancoragem, conforme mostrado na Figura O mais tradicional é chamado SMS (Spread Mooring System) e mantém a unidade fixada em um único aproamento, pois a amarração tem uma mesma rigidez na proa e popa. O outro sistema é chamado DICAS (Differenciated Compliance Anchoring System) e permite que o navio se alinhe parcialmente com a resultante ambiental, pois a rigidez da amarração da popa é menor que a da proa. Spread Mooring - SMS DICAS Figura 2-12: Sistemas Rígidos em Relação ao Aproamento 14


33 2.2.2 FPSO Baseado em Monocoluna Uma vez que FPSOs são unidades estacionárias e podem receber cargas ambientais pelos mais diversos aproamentos, uma nova família de cascos está sendo desenvolvida, minimizando movimentos das unidades devidos à interação com o meio ambiente. Estes novos cascos têm forma circular e alto período de Roll e Pitch, fugindo assim do período de excitação de ondas. Além disto, possibilitam uma concepção estrutural otimizada, tendo menores esforços cortantes e momentos fletores que os FPSOs baseados em cascos esbeltos. Um exemplo desta nova geração de casco é a Monocoluna da Sevan Marine, que será a primeira a ser operada no mundo, no campo de Piranema pela Petrobras. Para produção em águas ultraprofundas a utilização de dutos em catenária de aço (SCR) para o escoamento da produção é fundamental, uma vez que os risers flexíveis ainda não estão disponíveis para profundidades de água acima de 1800 metros. A solução MONOBR, desenvolvida pela Petrobras, trás adicionalmente a vantagem de ter baixos movimentos horizontais (heave) e facilitando sobremaneira o projeto dos SCRs. O que confere à MONOBR uma excelente resposta às excitações do mar é o equilíbrio dinâmico provocado pela atuação do moonpool hidrodinâmico (tanque central aberto para o mar) e pela forma externa do casco com suas variações de diâmetro. MONOBR - PETROBRAS Figura 2-13: Exemplos de Monocolunas 15
 Navios aliviadores dedicados (Shuttle Tanker - ST): Podem ser navios convencionais ou dotados de posicionamento dinâmico (Dynamic")
34 2.3 NAVIOS ALIVIADORES Os navios-tanque (NT) utilizados nas operações de offloading podem ser divididos em duas classes: a) Navios convencionais de transporte: Após a operação de offloading levarão o óleo diretamente para consumidores nacionais ou para a exportação; b) Navios aliviadores dedicados (Shuttle Tanker - ST): Podem ser navios convencionais ou dotados de posicionamento dinâmico (Dynamic Positioning DP). Estes navios ficarão dedicados à operação de alívio, fazendo transporte periódico deste óleo da UEP para a costa. A evolução dos navios aliviadores se deu segundo a Figura 2-14, passando por quatro gerações [11]. 1ª. Geração: Navio Convencional 2ª. Geração: DP Classe I 3ª. Geração: DP Classe II 4ª. Geração: DP Classe III Figura 2-14: Gerações de Navios Aliviadores Navios Convencionais (Passivos) Estes navios são convencionais de transporte, portanto possuem apenas propulsores a ré da embarcação, dimensionados para a navegação. A aproximação e manutenção de posição deste navio durante a operação de alívio da UEP é feita com o auxílio de um ou mais rebocadores para garantir a segurança da operação. 16

. http://www.boatnerd.com Túnel (Bow or Stern Thruster) http://www.naval-technology.")
35 2.3.2 Navios com Posicionamento Dinâmico (DP) Os navios com Posicionamento Dinâmico (Dynamic Positioning - DP) são dotados de propulsores complementares para auxiliar durante as manobras de aproximação e na manutenção de posição. Estes propulsores são geralmente do tipo tunnel thruster, que são propulsores inseridos em um túnel transversal (bombordo-boreste) no casco ou azimutais, que ficam expostos sob o casco e podem girar 360 o (durante a navegação estes propulsores azimutais são recolhidos ou rebatidos no casco). Túnel (Bow or Stern Thruster) Azimutal Figura 2-15: Principais Tipos de Propulsores Auxiliares para DP Os navios DP podem ser de diversas classes, que variam de acordo com a redundância dos sistemas. O padrão atual é a utilização de DP classe II para navios aliviadores, o que significa ter redundância completa em todos os componentes do sistema DP, mas já existe uma nova classe III que prevê redundância e separação física dos componentes. Desta forma aumenta-se bastante a segurança desta operação, tendendo a tornar desnecessária, na maioria dos casos, a utilização de rebocadores. 17
36 3 CARACTERÍSTICAS DO SISTEMA DE TRANSFERÊNCIA DE ÓLEO POR LINHA DE MANGOTES O objetivo deste capítulo é descrever os tipos de mangotes e acessórios, características físicas, configurações típicas, sistema de acoplamento e armazenamento da linha de mangotes de transferência de óleo. 3.1 ESTRUTURA DE MANGOTES Os mangotes são construídos em torno de um cilindro guia que garante o diâmetro interno. Neste cilindro são posicionados os flanges das extremidades e entre estes são depositadas camadas de diversos materiais (ex.: fibras, malhas de aço, borracha, etc.) até que este seja finalizado e receba então a pintura final. As duas principais famílias de mangotes são os submarinos e os flutuantes. Os submarinos devem ser pintados com uma linha branca ao longo do comprimento e de duas linhas circundando as extremidades. Os flutuantes devem ser pintados com uma linha em espiral laranja. 18

37 3.1.1 Carcaça Simples A composição estrutural do mangote varia dependendo do fabricante e das condições de operação às quais este mangote será submetido. Esta configuração básica deve combinar força e flexibilidade e por isto é formada por uma deposição de diversas camadas com propriedades distintas de materiais sintéticos e eventualmente uma espiral de aço para dar resistência adicional. Chamamos o conjunto destas diversas camadas de Carcaça, que deve ter determinadas propriedades e suportar limites estabelecidos em testes padrão definidos pela OCIMF [33]. Um exemplo da composição básica de um mangote de carcaça simples é mostrado na Figura 3-1. Offshore Hose Manual Dunlop Oil Marine Figura 3-1: Estrutura Básica de um Mangote Submarino de Carcaça Simples 19
 deve atender a todos os requisitos da primeira.")
38 3.1.2 Carcaça Dupla De forma a evitar vazamentos de óleo, a indústria desenvolveu a concepção de mangotes de carcaça dupla. Nestes mangotes são construídas duas carcaças totalmente independentes, onde a segunda carcaça (externa) deve atender a todos os requisitos da primeira. Desta forma, caso a primeira carcaça rompa, a segunda contém o óleo, garantindo a transferência de óleo seja finalizada com segurança, evitando que o mesmo vaze e cause danos ambientais. Porém, é recomendado que ao término da transferência em que foi detectado o rompimento, o mangote danificado da linha seja substituído. Um exemplo da composição básica da carcaça dupla de um mangote submarino é mostrado na Figura 3-2. Offshore Hose Manual Dunlop Oil Marine Figura 3-2: Estrutura Básica de um Mangote Submarino de Carcaça Dupla 20

![A camada de flutuação deve atender aos requisitos determinados pela OCIMF [33] de resistir por 24 horas à uma pressão externa equivalente à 10 metros de profundidade de água, sem que](/docs-images/79/79575829/images/39-1.jpg "haja colapso desta camada e consequentemente a diminuição do diâmetro e a perda de flutuabilidade.")
39 3.1.3 Camada de Flutuação A composição dos mangotes flutuantes é basicamente a mesma dos submarinos, apenas com o acréscimo de uma camada extra de flutuação, externa, geralmente composta de poliuretano, como mostra a Figura 3-3. A camada de flutuação deve atender aos requisitos determinados pela OCIMF [33] de resistir por 24 horas à uma pressão externa equivalente à 10 metros de profundidade de água, sem que haja colapso desta camada e consequentemente a diminuição do diâmetro e a perda de flutuabilidade. Outro requisito é a impossibilidade de absorção de água, evitando assim o acréscimo de peso na estrutura. Offshore Hose Manual Dunlop Oil Marine Figura 3-3: Estrutura Básica de Mangotes Flutuantes (Carcaça Simples e Dupla) 21

40 3.2 PRINCIPAIS COMPONENTES DE UMA LINHA DE MANGOTES Uma linha de mangotes pode ser composta por diversos elementos, desde variados tipos de mangotes, com as mais diferentes configurações, funções e particularidades até diversos apêndices, como bóias, colares de flutuação, redutores de diâmetro, divisores de fluxo, etc. Neste capítulo serão descritos brevemente apenas os principais componentes que serão citados e/ou utilizados ao longo deste trabalho Mangote Principal (Main Line) O mangote chamado de Mainline é um mangote convencional e simétrico, componente de quase toda a linha. Pode ser flutuante ou submarino e ter ou não carcaça dupla Mangote de Terminação (Tanker End) Para mangotes submarinos o Tanker End geralmente é reforçado para suportar maiores trações. Os flutuantes possuem geralmente, além desta característica, uma maior reserva de flutuabilidade para suportar o peso das válvulas de extremidade, além de serem mais complacentes à flexão e à abrasão, provocadas pelo dobramento causado sobre o casco quando a conexão é feita a meia nau, Figura 3-4. Offshore Hose Manual Dunlop Oil Marine Figura 3-4: Tanker End Conectado à Meia-nau 22
41 3.2.3 Mangotes de Transição Os dois principais tipos de mangotes de transição são os que proporcionam uma transição suave entre dois diâmetros internos distintos, Figura 3-5, e os que permitem a transição entre trechos da linha com flutuação diferenciada, Figura 3-6. Figura 3-5: Mangotes de Transição de Diâmetro Interno Figura 3-6: Mangotes de Transição de Flutuabilidade Colares de Flutuação Os colares flutuantes são usados para dar flutuabilidade a mangotes submarinos. Os mangotes submarinos que recebem estes colares possuem anéis de suporte onde os colares são fixados. Estes colares são geralmente compostos por células fechadas de poliuretano e são comumente fabricados para operações de até 45 m de profundidade, porém, maiores densidades de núcleo podem ser utilizados em até 80 m. A Figura 3-7 mostra exemplo de colar flutuante e seu uso. 23




42 Figura 3-7: Vista de Perspectiva e Exemplo de Uso de Colares de Flutuação Válvula Disco de Extremidade (NS Valve) De modo a evitar vazamento do óleo contido na linha de mangotes tanto durante a operação normal de desconexão quanto em uma desconexão de emergência da extremidade conectada ao NT Aliviador, utiliza-se uma válvula de vedação, que geralmente baseia-se em uma válvula disco de extremidade conhecida como North Sea (NS) Valve (Figura 3-8). Este tipo de válvula tem peso elevado, variando entre 0,7 a 1,5 tonelada. Figura 3-8: Válvula Disco de Extremidade de Linha de Mangotes (NS Valve) 24
.")
43 3.2.6 Junta Esférica (Ball Joint) Geralmente, nas conexões das extremidades da linha ao F(P)SO existe uma junta esférica, conhecida como Ball Joint, que permite rotação da linha em torno do eixo longitudinal desta, minimizando assim os danos à linha, porém, não suporta grandes ângulos fora do plano horizontal (aproximadamente 30 graus no máximo). Na conexão entre a Ball Joint e a NS Valve da extremidade da linha, quando ocorre uma dinâmica excessiva, tanto de flexão quanto de tração e compressão, estes equipamentos são danificados e a extremidade com a NS Valve fica abandonada no mar. B A Aprox. 30 o Rotação livre Figura 3-9: Válvula Esférica (Graus de Liberdade) 25
44 3.3 CARACTERÍSTICAS FÍSICAS DOS MANGOTES Comprimento O comprimento do mangote segue, em geral, padronizações estabelecidas pelos operadores e pelos fabricantes. Os comprimentos definidos como padrão pela OCIMF [33] são de 9,3 m e 10,67 m, porém o comprimento de 12,2 m tem se tornado também bastante popular Diâmetro Nominal O diâmetro nominal é medido internamente ao mangote, na área disponível para a transferência de fluidos e é uma dimensão definida pelo operador baseado na vazão de transferência Diâmetro Externo O diâmetro externo do mangote dependerá não só apenas de seu diâmetro interno, mas também de sua estrutura, ou seja, mangotes de carcaça simples possuem diâmetro externo menor do que os de carcaça dupla e mangotes flutuantes possuem diâmetro externo maior do que os submarinos (devido à camada de flutuação). De acordo com a OCIMF [33], mangotes submarinos devem ter espessura das camadas de no mínimo 7 mm, já os mangotes flutuantes devem ter sua camada de poliuretano de no mínimo 6 mm e a carcaça de no mínimo 5 mm. Se o mangote possuir carcaça dupla, esta deve ter no mínimo 4 mm de espessura. O diâmetro externo é igual a: D e = D i + 2t (3-1) Onde: D e = diâmetro externo; D i t = diâmetro interno; e = somatório das espessuras de todas as camadas. 26
45 3.3.4 Peso O peso no ar do mangote irá depender basicamente da composição estrutural do mesmo, portanto, cada fabricante apresentará um valor distinto para uma mesma característica de mangote. O peso na água consiste na diferença entre o deslocamento do mangote totalmente afundado e o peso deste no ar Reserva de Flutuabilidade De acordo com a OCIMF [33] mangotes flutuantes devem possuir uma reserva de flutuabilidade de no mínimo 20 % quando o mangote estiver totalmente submerso na água do mar e preenchido por ela, ou seja, o deslocamento do mangote deve ser igual ou superior a 120 % do seu peso com água do mar. O valor da reserva de flutuabilidade deve ser fornecido pelo fabricante e é calculado de acordo com a seguinte formulação: Onde: R buoyancy D = H ( WH + W W + W H W W ) (3-2) R buoyancy = reserva de flutuabilidade; D H = peso da água do mar deslocada pelo mangote quando este estiver totalmente submerso e preenchido com água do mar; W H = peso do mangote vazio no ar; e W W = peso da água do mar que pode ser contida no mangote. A partir deste parâmetro e do peso do mangote podemos obter o empuxo, que em geral é o valor que devemos ter como referência no projeto da linha. Vale ressaltar que, considerando mangotes com mesmo percentual de reserva de flutuabilidade, podem possuir, efetivamente, reservas diferentes se seus pesos com água do mar forem diferentes. 27
46 3.3.6 Rigidez Axial (EA) A rigidez axial é um parâmetro pouco utilizado no cálculo de linha de mangotes pois não é dado ao mangote suportar tração, mas, o mangote deve suportar um mínimo de tração devida ao manuseio do mesmo. A elongação permanente máxima após os testes hidrostáticos definidos pela OCIMF [33] é de 0,7% e a temporária de 2,5%. Assim sendo, é possível calcular a Rigidez Axial elasticidade de um mangote através de ensaios de tração e de posse das seguintes formulações: EA = E * A ; E = σ / ε ; Ε = δ / L ; σ = P / A ; δ = (P * L) / (A * E) (3-3) Onde: EA = rigidez axial; E = módulo de elasticidade do mangote; A = área da seção transversal do mangote; Σ = tensão no mangote; Ε = deformação de tração do mangote. Δ = alongamento total do mangote; L = comprimento do mangote; e P = força que produz a distensão do mangote; 28

47 3.3.7 Rigidez Flexional (EI) A rigidez de um mangote se relaciona principalmente com a estrutura e a pressão interna do mesmo. Quanto mais espessas forem as camadas que compõem o mangote, mais rígido ele será. O que também é válido para as camadas de flutuação, ou seja, um mangote flutuante é mais rígido do que um submarino e, quanto maior for essa camada, mais rígido ele será. A pressão interna também é diretamente proporcional à rigidez de um mangote. A Rigidez Flexional é variável ao longo da linha, sendo as extremidades mais rígidas à flexão que o meio do mangote, porém, geralmente o valor fornecido pelos fabricantes é o valor médio obtido a partir de um teste de rigidez estabelecido pela OCIMF [33], conforme a Figura 3-10, onde o mangote é submetido à um raio de curvatura igual ao seu comprimento a fim de estabelecer sua rigidez à flexão (EI) através da fórmula:. Onde: 2 PL ASenZ EI = (3-4) 8H EI = rigidez à flexão do mangote; P = força no sistema de momento de tensão; L = comprimento do mangote; A = comprimento do momento de trava (1,83 metros); Z = ângulo entre o sistema de tensão e o momento de trava (118º); H = deflexão no centro do mangote. Figura 3-10: Testes para Obtenção da Rigidez Flexional (EI) 29
48 3.3.8 Raio Mínimo de Curvatura O raio de curvatura admissível é o valor até o qual o mangote pode ser flexionado sem que haja danos à estrutura. Este dado varia de acordo com a composição estrutural do magote, porém, existem valores mínimos recomendados pela OCIMF [33]. De acordo com a OCIMF [33], os mangotes submarinos e os tanker end devem ser capazes de trabalhar com dobramentos de raio mínimo de 4 vezes o diâmetro nominal, pois normalmente são submetidos a situações de dobramento mais acentuadas, e para isso requerem uma capacidade maior de flexão. Os mangotes flutuantes devem ser projetados e construídos de forma a suportarem, raios de curvatura mínimos de 6 vezes o diâmetro nominal. Porém, os fabricantes constantemente desenvolvem melhorias na construção do mangote para que este resista a menores raios de curvatura Pressão Externa Admissível A OCIMF [33] determina que o mangote flutuante deve suportar por 24 horas submerso a 10 m, além disso, as seções de mangotes podem perder a garantia de flutuação, sem que isso indique falha de projeto ou de construção. Vale ressaltar que a pressão externa do mangote não deve ultrapassar a interna, para que este não entre em colapso, por isso, os mangotes submarinos devem ser capazes de operar em uma profundidade de até 76 m com líquidos de densidade 0,8. 30
49 3.4 COEFICIENTES HIDRODINÂMICOS Encontram-se na literatura várias referências sobre o cálculo de forças de onda e correnteza sobre elementos esbeltos que estão totalmente submersos ou, no máximo, furando a superfície livre da água [29] [38]. No entanto, não existem referências de estudos ou pesquisas sobre coeficientes e forças hidrodinâmicas em elementos esbeltos que estejam flutuando, parcialmente submersos. Desta forma, o estudo de uma linha de mangotes na superfície livre é uma abordagem inédita, pois, trata-se de um elemento cilíndrico esbelto flutuante, sujeito a um regime de escoamento oscilatório. Porém, mesmo no caso de mangotes flutuantes, como o diâmetro do elemento é muito menor que o comprimento de onda, ou seja, D/λ é muito pequeno, o regime de escoamento sobre o mangote tem características similares ao apresentado nas referências de cilindros submersos [29][38] com forte dependência dos números de Reynolds e de Keulegan-Carpenter (KC). A equação de Morison é utilizada para representar as forças hidrodinâmicas sobre estas estruturas, com termos de aceleração e de velocidade, representando as parcelas de inércia e de arrasto. Porém, os coeficientes hidrodinâmicos utilizados devem ser calibrados para representar os fenômenos hidrodinâmicos que aparecem nos mangotes reais. Devido à forte dependência da viscosidade nas forças relativas à aceleração e a velocidade, os coeficientes de massa adicional (C A ), de arrasto (C D ) e de sustentação (C L ) são obtidos em ensaios em tanque de provas ou, ou até mesmo em canais com modelos em tamanho real. 31
50 Para cilindros submersos em regime de escoamento uniforme, existem na literatura [29][53] curvas de C D, que mostram a variação deste coeficiente para diversos valores de Reynolds, conforme Figura 3-11 [29]. A Figura 3-12 [29] mostra para diversas secções o percentual do arrasto proveniente da pressão e o percentual proveniente da fricção. No caso de cilindro circular, pode-se observar que o C D é 90% advindo da pressão. Figura 3-11: Coeficiente de Arrasto de um Cilindro Infinito Submerso Figura 3-12: Contribuição da Parcela de Pressão e de Fricção no Arrasto Neste caso, devida a ausência de aceleração do fluido, a tendência é que o valor de C A seja nulo e, devida à simetria do cilindro submerso, o C L também tende a ser nulo. Porém, a depender da velocidade e viscosidade do fluido, pode ocorrer o fenômeno de VIV, Vortex Induced Vibration, caracterizado por induzir vibrações de alta freqüência no corpo. Nestas condições os valores observados de C L e C A diferem de zero. 32
51 Também existe na literatura que os coeficientes hidrodinâmicos de cilindros submersos sujeitos a um fluxo oscilatório, além de depender de Reynolds, também variam com Keulegan-Carpenter [16] [22]. Tanaka e Ikeda [34] [45] também apresentaram coeficientes para diversos tipos de cilindros submersos em fluxos oscilatórios, porém o foco é verificar a variação do C A e C D com a variação geométrica da sua seção transversal. A força de inércia compreende uma parcela que depende da aceleração do corpo e outra que depende da aceleração do fluido. Para escoamentos em torno de corpos cilíndricos, é conveniente expressar estas parcelas em função do coeficiente de inércia, C M = 1 + C A. Este coeficiente recebe este nome por representar a proporcionalidade com a aceleração da massa fluida que foi deslocada pelo corpo. Tal como o C D, o C A depende também dos números de Reynolds (Re) e Keulegan-Carpenter (KC). Hover [18] apresenta resultados experimentais de C M e C D tirados de cilindros lisos submersos oscilando em águas tranqüilas, para faixas de variação de Reynolds e Keulegan- Carpenter. Figura 3-13: C D e C M como função de KC, para um cilindro longo com β = Re / KC =
52 Figura 3-14: C D e C M como função de β = Re / KC, para um cilindro longo com KC = [π, 2π] No caso de um cilindro na superfície livre, que se aproxima do problema do mangote flutuante, nada foi encontrado na literatura, porém algumas considerações podem ser feitas: C D : A área considerada no cálculo da força de arrasto é a área da parcela submersa do mangote. O fluxo percorre apenas uma parcela da superfície do cilindro, portanto a parcela de fricção é inferior. Existe também um acúmulo de fluido na parte frontal do elemento. Todos estes aspectos geram uma incerteza muito grande no possível valor de C D, tornando fundamental ensaio para obtenção deste valor; C M : Neste caso, valem as mesmas incertezas do C D, considerando que, para o caso específico da linha de mangotes flutuando em mar operacional, a faixa de variação de KC é muito mais elevada do que as usualmente encontradas na literatura [16][18], as quais retratam o caso de cilindros oscilando devido ao VIV. C L : Não há descolamento alternado em torno do cilindro, portanto não apresenta VIV, porém, o fluxo sob a secção do mangote pode provocar uma região de baixa pressão e um conseqüente afundamento, Figura 3-15, alterando a área submersa. Uma hipótese simplificadora é desprezar o C L, e simular o seu afundamento a partir da majoração do C D ao invés da consideração de uma área submersa maior; 34
53 C L Figura 3-15: Afundamento Provocado pelo C L Pelos danos apresentados nas linhas de mangotes, observa-se que os elementos que sofrem maiores desgastes são os elementos de mangote das extremidades, bem como as conexões no navio, o que indica que o problema dominante a ser considerado é a interação entre a dinâmica do navio e a da linha, causada pela elevação de onda. Devido à proximidade do cilindro da superfície livre e da relação D/λ, as forças de excitação dinâmicas predominantes são de natureza hidrostática, dependentes basicamente do perfil de ondas instantâneo, conforme Anexo 2. 35
, que é o cabo que manterá o aliviador amarrado ao terminal.")
SO, a linha mensageira (também chamada de retinida) é lançada pelo canhão de ar comprimido do NT Aliviador (Figura 3-16 a).")
54 3.5 SISTEMAS DE ACOPLAMENTO DA LINHA DE MANGOTES Neste capítulo será feita uma breve descrição da operação de aproximação do NT Aliviador ao Terminal Oceânico e dos sistemas de acoplamento da linha de mangotes. Enquanto o NT Aliviador se aproxima do terminal oceânico com máquina reduzida, conecta-se uma linha mensageira à espia (hawser), que é o cabo que manterá o aliviador amarrado ao terminal. No caso da monobóia isso é feito com auxílio de uma embarcação de apoio. No F(P)SO, a linha mensageira (também chamada de retinida) é lançada pelo canhão de ar comprimido do NT Aliviador (Figura 3-16 a). Após conectada a linha mensageira, os guindastes da embarcação puxam o hawser (Figura 3-16 b), enquanto o navio chega a uma distância adequada e o motor principal é desligado. O NT Aliviador pausadamente se posiciona obedecendo à influência das ondas, do vento e da corrente. a. Lançamento da Retinida b. Acoplamento do Hawser Figura 3-16: Conexão do NT Aliviador ao F(P)SO 36


, mas, ainda hoje, se convive com navios de")

. www.apl.no www.tnpetroleo.com.")
55 O flange do mangote é então içado a bordo do aliviador, conectado e as cargas fluidas podem ser carregadas e descarregadas. A tendência atual, visando menores comprimentos e facilidade de armazenamento da linha de mangotes, é que a conexão desta no navio aliviador seja feita pela proa Bow Loading System (BLS) em Shuttle Tankers dedicados para a operação de alívio (Figura 3-17), mas, ainda hoje, se convive com navios de transporte, projetados para transferência de óleo em portos, que apresentam o ponto de conexão da linha de mangotes a meia-nau e, nesses casos, a embarcação de apoio é necessária para posicionar a linha de mangotes para o içamento (Figura 3-18). Figura 3-17: BLS (Bow Loading System) - Detalhe no Sistema de Acoplamento 37
SO como no")
56 Figura 3-18: Conexão à Meia-nau com Auxílio de Embarcação de Apoio Atualmente, visando a segurança da operação de offloading, o sistema de conexão da linha de mangotes tanto no F(P)SO como no Shuttle Tanker é feito através de um sistema composto por uma Ball Joint que permite pequenos movimentos angulares da linha em torno do ponto de conexão e um sistema de desconexão rápida e sem vazamentos no caso de uma emergência. Nos F(P)SOs ancorados em ponto único o offloading é geralmente feito pela popa Stearn Discharge System (SDS) de modo a permitir que o navio aliviador acompanhe o aproamento da UEP. As unidades F(P)SO, baseadas em navios, ancoradas em quadro de ancoragem podem tanto ser dotados de sistema de descarga em um único ponto (proa ou popa) quanto em dois Double Discharge System (DDS). Neste caso, devido às linhas de ancoragem terem proximidade com a projeção da linha de mangotes, a tendência é se utilizar mangotes flutuantes para que, no caso de desconexão de emergência, não haja interferência entre a linha de mangotes e as linhas de ancoragem (principalmente se estas possuírem trechos de poliéster, que são muito frágeis quando em contato com o metal). Finalizada a operação de transferência de óleo, a equipe do NT Aliaviador desconecta a linha de mangotes e solta o hawser. A linha de mangotes é então drenada, limpa e preparada para ser armazenada junto ao Terminal Oceânico. 38
57 3.6 ARMAZENAMENTO DA LINHA DE MANGOTES Basicamente são três (3) as formas de armazenamento da linha de mangotes: no mar, em uma calha sobre o casco (Chute) ou em um carretel (Reel). O armazenamento da linha no mar é utilizado em monobóias ou em unidades não preparadas para o recolhimento desta sobre o casco. Este tipo de armazenamento também é utilizado em linha de mangotes de emergência. Neste caso, as linhas devem ser flutuantes para que não haja interferência com a ancoragem ou, no caso da monobóia, problemas de instabilidades devidos ao pequeno deslocamento do casco. O armazenamento da linha sobre o casco aumenta bastante a vida útil do mangote, uma vez que este somente está sujeito às forças ambientais durante a operação de offloading. Estas linhas podem ser flutuantes ou não, observando-se apenas os parâmetros de diâmetro, comprimento e raio mínimo de curvatura no dimensionamento da calha ou do carretel. A calha é um sistema composto por diversos roletes distribuídos ao longo de um dos bordos do F(P)SO onde a linha de mangotes é armazenada horizontalmente. Os roletes da calha podem gerar deformações nas camadas externas dos mangotes e a extensão da calha sobre o casco diminui a área útil para a planta de processo. A grande vantagem é que no sistema DDS só é necessária uma linha para servir aos dois pontos de offloading. 39

,")



58 Figura 3-19: Armazenamento da Linha de Mangotes em uma Calha com Roletes A tendência atual é que o armazenamento seja feito em carretéis (Figura 3-20), que são tambores dotados de guias que permitem que a linha de mangotes seja enrolada com um raio de curvatura superior ao mínimo admissível. Este sistema garante maior integridade dos mangotes e se adapta melhor ao arranjo da unidade. Figura 3-20: Armazenamento da Linha de Mangotes Enrolada em um Carretel 40
59 4 PROJETO DA LINHA DE TRANSFERÊNCIA Neste capítulo serão descritos alguns aspectos que devem ser considerados no projeto de uma linha de mangotes para transferência de óleo no mar. 4.1 CRITÉRIOS UTILIZADOS O principal guia para fabricação e teste de mangotes de carga e descarga de óleo é o guia da OCIMF [33]. Este guia fornece os requisitos mínimos e as propriedades que mangotes submarinos e flutuantes devem apresentar. Não existe uma regulamentação específica para o projeto de uma linha de transferência de óleo composta por elementos de mangotes, porém esta será analisada durante a avaliação de riscos da unidade, tanto em relação a risco individual quanto em relação a risco ambiental. Portanto, o projeto da linha de transferência deve ser tal que garanta a integridade dos mangotes e outros componentes desta, observando para isto, os limites de resistência destes aos esforços aos quais estão sujeitos (pressão interna e externa, flexão, torção, etc). 41
.")

60 4.2 DEFINIÇÃO DE DIÂMETRO A definição do diâmeto interno dos mangotes utilizados em uma linha de transferência depende basicamente do volume e do tempo de transferência do óleo. Estes parâmetros são especificados pelo operador. No Brasil, usualmente se transfere em 24 horas aproximadamente 1 milhão de barris (óleo suficiente para completar um NT Aliviador Suezmax). No Mar do Norte, os operadores custumam não adotar como prática a transferência de óleo durante a noite, portanto, a transferência é feita em aproximadamente 12 horas. Outros aspectos que devem ser levados em consideração são a perda de carga e os limites de velocidades recomentados pela OCIMF [33], que são 21 m3/h até diâmetros de 400mm e 15 m3/h até diâmetros de 600mm. Dispondo destes parâmetros, pode-se definir o diâmetro ideal pra cada sistema. Figura 4-1: Relação Velocidade x Vazão Offshore Hose Manual Dunlop Oil Marine 42
61 4.3 DEFINIÇÃO DO TIPO DE LINHA A escolha por uma linha flutuante ou submarina depende de alguns fatores: Tipo de terminal: se for FSO ou FPSO a linha de transferência pode ser qualquer uma, mas no caso de monobóia, devido ao pequeno deslocamento desta, a linha submarina se torna inviável pois acarretaria em um grande peso, além de a linha não poder ser armazenada sobre o casco; Tipo de ancoragem: no caso de ancoragem em ponto único ambas as linhas podem ser utilizadas, mas no caso de ancoragem SMS, principalmente se a linha de ancoragem for composta por trechos de poliéster, a linha deve ser flutuante para que não haja interferência das partes metálicas da linha de mangotes com a linha de ancoragem; Forma de armazenamento da linha de mangotes: no caso de armazenamento sobre o casco, ambas as linhas podem ser utilizadas, mas no caso de armazenamento no mar a linha deve ser flutuante Diagrama de Fluxo de Projeto Unidade FPSO Monobóia Ancoragem TURRET SMS/DICAS Armazenamento da Linha de mangotes No Navio No Mar Tipo de Linha de mangotes Submarina Flutuante 43
62 4.4 DEFINIÇÃO DO COMPRIMENTO A definição do comprimento da linha dependerá basicamente da distância máxima entre os pontos de conexão da linha com o F(P)SO e com o NT Aliviador, de forma a impedir que haja tração na linha de mangotes. D Máxima D Conexão H F(P)SO H Aliviador Figura 4-2: Esquema com as Distâncias Principais no Cálculo do Comprimento Mínimo da Linha de Mangotes L min = H F(P)SO +D ConexãoF(P)SO +D Máxima +D ConexãoAliviador +H Aliviador (4-1) Onde: L min = Comprmento mínimo da linha de mangotes Distância máxima entre as extremidades do F(P)SO e do NT D Máxima = Aliviador H F(P)SO H Aliviador D ConexãoF(P)SO D ConexãoAliviador Altura máxima do ponto de conexão da linha de mangotes no = F(P)SO e no NT Aliviador Distância máxima do ponto de conexão da linha de mangotes = em relação à extremidade do F(P)SO e do NT Aliviador Após o cálculo do comprimento mínimo, análises numéricas devem ser feitas, considerando a zona operacional do NT Aliviador em relação ao FPSO e o efeito das condições ambientais atuantes de forma a garantir que a tração não atingirá valores superiores ao admissível. 44
63 4.5 CONDIÇÃO AMBIENTAL LIMITE A condição ambiental limite para o projeto de uma linha de mangotes irá depender basicamente da forma de armazenamento desta linha. Se a linha for armazenada sobre o casco, a condição ambiental limite a qual esta estará sujeita será a condição limite operacional para offloading, uma vez que em condições ambientais superiores a operação de transferência de óleo será abortada e a linha será recolhida. Em geral a condição limite adotada pela indústria de petróleo para a operação de offloading é aproximadamente a condição de tempestade com recorrência anual. No caso de armazenamento da linha de mangotes no mar, a condição ambiental limite para o projeto da linha deve ser a mesma adotada para o projeto do Terminal que, para sistemas de longo prazo, geralmente é adotada a condição de tempestade com recorrência centenária. 45

64 5 VANTAGENS E DESVANTAGENS DOS TIPOS DE LINHA 5.1 LINHA DE MANGOTES SUBMARINA A linha de mangotes submarina possui diversas vantagens quando comparada com a linha flutuante. Conforme visto no Capítulo 3.1, o mangote submarino possui uma camada de material a menos que o flutuante, o que proporciona um custo reduzido e menores diâmetros externos quando comparados com um mangote flutuante de mesmas características. O menor diâmetro provoca uma redução na dimensão necessária para o sistema de armazenamento da linha de mangotes, reduzindo consequentemente o custo deste sistema e a utilização do espaço do convés. Por sua configuração em catenária e o fato de cortar a superfície livre quase que perpendicularmente, a linha está pouco sujeita à dinâmica das ondas, exceto pela dinâmica que estas impõem ao terminal flutuante, consequentemente transferida à linha pela conexão desta no casco. A grande desvantagem deste tipo de linha é a limitação de sua utilização em diversos sistemas conforme descrito nos capítulos anteriores, ficando atrativa sua utilização basicamente em um sistema F(P)SO ancorado em SPM. Figura 5-1: Sistema de Transferência com Linha Submarina 46

65 5.2 LINHA DE MANGOTES FLUTUANTE A linha flutuante é bastante versátil em sua utilização e pode ser adotada em todos os sistemas de transferência de óleo entre os terminais oceânicos e o NT Aliviador. A linha flutuante é mais cara e mais complexa em seu armazenamento sobre o casco que a linha submarina, necessitando de carretéis com maiores diâmetros e calhas mais largas para poder acomodar o mesmo comprimento de linha de mangotes. Porém, o grande problema da linha flutuante se dá na redução da vida útil dos elementos das extremidades devida a danos provocados pela característica desta linha de acompanhar a elevação das ondas, Figura 5-2 e Figura 5-3, associada à dinâmica imposta pelo terminal oceânico onde esta está conectada, que por vezes podem ter fases distintas. Offshore Hose Manual Dunlop Oil Marine Figura 5-2: Sistema de Transferência com Linha Flutuante 47
66 Figura 5-3: Geometria da Linha de Mangotes Flutuante sob Ação das Ondas Devido à restrição na extremidade da linha conectada à unidade flutuante, o trecho da linha posicionado na transição entre a parte suspensa e a parte flutuando sobre a superfície do mar sofre uma grande curvatura, que não só pode danificar por fadiga ou por esforços extremos os mangotes desta região, como também transmitir este esforço para a extremidade, provocando uma grande oscilação nos esforços de tração na conexão, podendo danificar as garras do equipamento que mantém a linha conectada ao F(P)SO ou ao NT Aliviador (Figura 5-4). Figura 5-4: Regiões Críticas a Danos da Linha de Mangotes Flutuantes 48
67 6 PROPOSTA DE LINHA COM FLUTUAÇAO CONTROLADA A linha proposta, a qual será denominada Linha com Flutuação Controlada, tem como objetivo ser uma linha flutuante, com todas as suas vantagens, porém minimizando a principal desvantagem, relacionada aos desgastes dos elementos das extremidades provocados pela dinâmica das ondas. Para que estes desgastes sejam minimizados, serão associados à configuração da linha alguns elementos de mangote submarinos nas extremidades. Estes mangotes submarinos serão posicionados de forma que cortem a superfície livre verticalmente, sofrendo assim menor imposição de movimentos devida à influência das ondas. Porém, a principal função destes elementos é a formação de catenárias que funcionarão como atenuadoras da dinâmica imposta à parte flutuante da linha pelas ondas e pelo terminal oceânico. Estas catenárias absorverão estes movimentos através da alteração de sua geometria, conforme Figura 6-1, evitando curvaturas excessivas nos elementos de mangotes das extremidades e minimizando os esforços transferidos para a conexão da linha com a unidade. Figura 6-1: Absorção dos Movimentos do Terminal e das Ondas sobre a Parte Flutuante das Linhas pela Forma da Catenária da Extremidade 49
68 7 MODELO NUMÉRICO A análise numérica do problema da linha de mangotes pode ser feita seguindo variadas metodologias. Ao longo deste capítulo será descrita brevemente a metodologia presente no programa ORCAFLEX [35] que foi utilizado para os cálculos apresentados nesta dissertação. Uma descrição um pouco mais detalhada das metodologias de solução de linhas será apresentada no ANEXO 1. 50
69 7.1 SOLUÇÃO DA LINHA POR ELEMENTOS FINITOS O Método de Elementos Finitos se baseia em dividir a linha em elementos de pequeno comprimento presos a dois nós, sujeitos a deslocamentos causados pela atuação das forças internas e externas sobre estes. Basicamente a discretização da linha em elementos finitos pode utilizar elementos de pórtico, que apresentam resultados nos 6 graus de liberdade (translações e rotações), dando um resultado bastante bom, porém, requerendo um tempo computacional elevado e pode utilizar também elementos de treliça, que apenas resolvem 3 graus de liberdade (translações), mas requerem um tempo computacional bem menor. Como a flexão é uma característica muito importante nesta análise de linha de mangotes, a metodologia de treliça não seria adequada, porém, o programa ORCAFLEX [35] se utiliza de uma metodologia de treliça com uma mola virtual adicional, unindo dois elementos adjacentes de forma a simular a flexão. Pelos bons resultados e reduzido tempo computacional desta metodologia, associado a uma fácil interface gráfica, este é o programa comercial mais utilizado pelas empresas fabricantes de mangotes e será o programa adotado nas análises desta dissertação. Z Y i E X i u 3 (a) C L 0 E u 2 u 1 j j C L u 6 u 5 u 4 F i restauração F i S i esf. interno cisalh. F i inercial F i atrito i F i corrente F i peso (b) F j restauração F j cisalh. F j atrito S j esf. interno j F j inercial F j corrente F j peso Figura 7-1: Elemento de Treliça e Esforços Considerados 51
70 7.2 FORÇAS ATUANTES SOBRE A LINHA As principais forças atuantes sobre as linhas são: peso próprio, empuxo, esforços internos resistentes, correnteza, onda e movimentos induzidos pelos navios na extremidade da linha. As forças de vento sobre o mangote serão desprezadas por não terem grande influência sobre os resultados. Os problemas não-lineares de dinâmica estrutural são governados pela Equação (7-1) e sua modelagem física resume-se basicamente na determinação dos termos desta equação.. M U.. ( t) + F ( U( t), U( t)) = F ( t) (7-1) Int Ext Onde: M = matriz de massa; Ü(t) = aceleração; F Int (U(t), Ů(t)) = esforços internos; e F Ext (t) = esforços externos. 52
71 7.3 EQUILÍBRIO ESTÁTICO DA LINHA Neste capítulo serão descritas as aproximações numéricas para cálculo das forças estáticas atuantes sobre a linha de mangotes. Os comentários serão feitos em sua maioria considerando o cálculo do equilíbrio estático inicial, porém, ao longo da análise dinâmica, as cargas estáticas são novamente calculadas a cada delta de tempo, seguindo a mesma modelação, a partir da configuração do instante anterior Configuração Inicial da Linha (Catenária) Para facilitar a busca do equilíbrio estático da linha, uma configuração inicial é definida, baseada na equação da Catenária, tal como ilustrado na Figura 7-2. Desta forma, o cálculo estático pelo MEF partirá de uma configuração inicial próxima à configuração estática final. Tv j β Th j Tv i w, EA, L Th i Figura 7-2: Modelo de Catenária Utilizado para Geração da Malha 53
72 7.3.2 Modelo de Massa Concentrada O modelo de Massa Concentrada (Lumped Mass) [35], [40] é um modelo que vem sendo utilizado há muitos anos e visa obter uma matriz de massa diagonal, o que diminui consideravelmente o número de operações para obtenção da solução das equações de equilíbrio, reduzindo assim o tempo computacional. Neste modelo, toda a massa dos elementos é dividida em dois e transferida diretamente para os nós, conforme ilustrado na Figura 7-3. Desta forma, os nós têm peso equivalente à soma das metades dos pesos dos elementos conectados a este. P 1 P 2 P 1 2 P P 2 2 P 2 2 Figura 7-3: Modelo de Massa Concentrada 54
73 7.3.3 Esforços Internos Resistentes Os esforços internos resistente são compostos por duas parcelas. A primeira inclui os efeitos das forças elásticas e a segunda parcela inclui os efeitos das forças de amortecimento, ilustradas na Figura 7-4 e conforme as Equações (7-2) e (7-3):. F ( U( t), U( t)) = F ( U( t)) + F ( U( t)) (7-2) Int Int. Elásticas Int. Amortecimento. ( L Lo ) F Int = E A e + Cv (7-3). L o Onde: F Int EA L L o = força interna resistente; = rigidez axial; = comprimento final, correspondente à configuração deformada; = comprimento inicial e = vetor unitário nas direções X, Y e Z; C = matriz de amortecimento de Rayleigh; e v = vetor velocidade Y i E X C L 0 E j j C u 6 u 5 u 4 Z i u 3 u 2 u 1 L Figura 7-4: Esforços Internos Resistentes 55
74 7.3.4 Momentos Fletores Nodais Embora se trate de um modelo de treliça, o ORCAFLEX [35] utiliza uma aproximação baseada na formulação apresentada no trabalho de Ghadimi [17], que propõe a transformação dos momentos fletores em um binário de forças cisalhantes. Desta forma, permite uma boa aproximação para o cálculo de flexão em elementos de treliça. m e k j M j j L j e M j j e Figura 7-5: Curvaturas e Momentos Fletores 56
75 7.3.5 Empuxo (Modelo de Empuxo Concentrado) O empuxo age como força de restauração sobre todo comprimento dos elementos submersos utilizados para representar uma seção da linha modificando assim a condição inicial de equilíbrio estático da linha, conforme Figura 7-6. E P E P Figura 7-6: Esquema de Equilíbrio entre Peso e Empuxo nos Nós Por esta propriedade da linha ser variar de acordo com a posição do elemento finito em relação à superfície livre, se utiliza uma discretização maior do elemento, formando sub-nós entre os nós originais deste, conforme Figura 7-7, onde é calculado o empuxo. Neste contexto, o empuxo é calculado numericamente a partir da concentração desta flutuabilidade em n pontos distintos igualmente distribuídos ao longo do comprimento dos elementos. A soma total dos empuxos concentrados em cada sub-nó fornecerá o empuxo total do elemento. 57
76 F j F j F j restauração j F j F j F i restauração F j F i cisalh. F i F i inercial i F i peso F i corrente Parcela de empuxo concentrado Parcela de massa concentrada Figura 7-7: Consideração do Empuxo, Massa e outras Forças sobre o Elemento Para simular a situação de linha flutuando será associada a cada nó uma variação do empuxo que depende da posição deste nó com relação à superfície do mar. Assim se o nó estiver totalmente submerso ele terá uma força de empuxo correspondente ao empuxo total, se ele estiver totalmente emerso seu empuxo será nulo e, finalmente, quando ele estiver a menos de um diâmetro da superfície sua força de empuxo variará com a distância z deste ponto à superfície, conforme Figura 7-8. Empuxo Total Nulo Z 1 Empuxo Nulo Total Z 2 Figura 7-8: Cálculo do Empuxo Baseado na Parcela Submersa do Sub-nó Após definida a força de empuxo no elemento, calculada a partir do empuxo dos subnós submersos, esta é aplicada nos nós extremos da barra de forma consistente. 58
77 7.3.6 Força de Correnteza A força de correnteza no mangote pode ser representada basicamente por arrasto, porém cabe ressaltar que, devido à proximidade da superfície livre, alguns elementos submergem ou flutuam conforme a dinâmica de interação entre onda e o elemento cilíndrico. Nestas condições, não é trivial considerar as forças causadas pelo escoamento uniforme que incide sobre o cilindro, pois a área submersa está variando a cada instante. A mesma consideração de dividir o elemento em sub-nós para o cálculo do empuxo se aplica também para calcular a área e o comprimento submerso da linha. Esta área submersa estará sujeita à ação da correnteza e para ela será aplicada a parcela estática da formulação de Morison, com C D constante Parcela Estática de Onda Neste ponto cabe ressaltar a diferença de abordagem de forças de onda sobre elementos esbeltos e sobre elementos de grande deslocamento. Nos casos de elementos de grandes deslocamentos, onde há fenômenos como difração e irradiação de ondas, o esforço de onda é dividido em uma parcela estática, chamada de deriva média, e duas parcelas dinâmicas, uma de primeira ordem, na faixa de freqüência da onda, e outra de baixa freqüência, advinda dos efeitos não lineares de superfície livre. Os elementos esbeltos não alterarem o perfil da onda incidente e por isso, conforme detalhado no Anexo 2, simplificações permitem que os esforços de onda e correnteza sejam calculados a partir do campo de velocidades e acelerações incidente, aplicando-se a formulação estendida de Morison [15] [27] [35] [43]. De qualquer forma, considerando o cálculo através da formulação de Morison, nota-se que o termo da força de arrasto é dependente da velocidade ao quadrado, gerando, assim, um esforço oscilatório cuja média é diferente de zero. 59
78 7.4 CÁLCULO DA DINÂMICA DA LINHA Carga Dinâmica de Onda Devido às dimensões transversais da linha de mangotes em relação a comprimento das ondas encontradas no mar, as forças de ondas que prevalecem são de natureza hidrostática, dadas pela parcela de Froude-Krilov, conforme detalhado no Anexo 2. Dentre as forças que mais afetam na dinâmica da linha de mangote, destaca-se a força vertical, quase-estática, representada pelo perfil geométrico da onda, que atua em cada seguimento da linha de mangotes. Assim, o problema dinâmico da linha torna-se um problema quase-estático de equilíbrio de peso e empuxo de cada segmento do mangote, seguindo o perfil da onda. Mesmo modificando os coeficientes hidrodinâmicos C D e C M, devido à relação D/λ, a ordem de grandeza das forças inerciais e viscosas não interfere muito na dinâmica da linha. O que realmente prevalece é o equilíbrio quase-estático entre a flutuação e peso do mangote Dinâmica Imposta nas Extremidades Os movimentos impostos nas extremidades da linha de transferência são os responsáveis por grande parte da dinâmica imposta sobre a linha de mangotes. Os movimentos de cada embarcação [39] são passados para as extremidades da linha, considerando movimento de corpo rígido e a sua transferência para a local da conexão. Os movimentos que mais interessam são os movimentos de primeira ordem, proporcionais à elevação da onda, tais movimentos que podem ser obtidos através de uma análise específica de movimentos, conforme WAMIT [49] [50]. 60
79 A análise feita no domínio da freqüência, graças às hipóteses simplificadoras, gera uma função de transferência que representa a resposta da embarcação para cada freqüência de onda, com amplitude unitária. O cruzamento de tal função com o espectro de energia de onda fornece o espectro da resposta, o qual pode ser também expandido para o domínio do tempo através da transformada inversa de Fourier [37] [13]. O programa ORCAFLEX [35], como muitos outros para análise da dinâmica de estruturas e linhas, aceita como entrada as funções de transferência dos movimentos da embarcação, representadas pelos respectivos RAOs (Response Amplitude Operators), fazendo automaticamente a transferência para o ponto de conexão da linha. Com estes dados e mais as informações sobre a geometria e propriedades mecânicas da linha, fazse a análise dinâmica da linha no domínio do tempo, fornecendo como resultados o estado de tensões e deformações ao longo da mesma. 61
80 8 ANÁLISES NUMÉRICAS Devido às dificuldades, explicitadas no Capítulo 3.4, para obtenção dos coeficientes hidrodinâmicos do mangote na superfície livre, as análises numéricas terão como resposta valores com qualidade quantitativa não muito boa. Por este motivo, as análises aqui realizadas da linha proposta serão feitas sempre em comparação com uma linha totalmente flutuante equivalente para que se possa chegar às importantes conclusões qualitativas das vantagens de uma linha sobre a outra. Também será analisada a influência da variação destes coeficientes, de algumas propriedades mecânicas e das condições ambientais atuantes no comportamento das linhas. 8.1 CENÁRIO ESCOLHIDO O cenário escolhido para este estudo é uma linha de mangotes, armazenada flutuando no mar, na popa de um F(P)SO baseado em um VLCC, amarrado em ponto único (SPM) e projetado para suportar condições ambientais com período de recorrência centenário. O NT Aliviador será um navio do tipo Suezmax. Este cenário foi escolhido por se tratar de uma condição de operação crítica para a fadiga dos mangotes, pois estes ficam sujeitos constantemente às excitações das ondas. O cenário é crítico também para a condição extrema de projeto da linha de mangotes, pois esta deverá ser a mesma adotada para o F(P)SO. Como o F(P)SO estará amarrado em SPM, a configuração mais freqüente estará alinhado com a resultante ambiental. Alguns casos serão simulados considerando um desalinhamento da correnteza de até 45 graus em relação ao o vento e a onda, que tendem a estar alinhados, porém apenas os casos alinhados serão apresentados. A sombra viscosa provocada pelo navio sobre a linha será desconsiderada neste estudo, embora isto vá provocar muitas vezes uma sobrecarga sobre a linha em relação à situação real de cargas incidentes. Por se tratar de um estudo qualitativo esta consideração não trará nenhum impacto nas conclusões. 62
81 8.2 CONFIGURAÇÕES ANALISADAS Linha Estivada (Durante Armazenamento no Mar) Neste cenário de estudo, a situação de estiva no mar é a configuração a qual a linha estará sujeita durante a maior parte de sua vida. Por isto, deverão ser consideradas as mais diversas condições ambientais atuando sobre a linha de mangotes, incluindo a condição centenária. Os pontos de conexão das extremidades da linha situam-se na altura do convés, simetricamente nos dois bordos da popa do F(P)SO, com uma distância de 30 metros entre eles, conforme Figura m Figura 8-1: Configuração da Linha Estivada e Conexão no F(P)SO Será considerado que o pontal do F(P)SO é de 27 m e o calado variará de um mínimo de 8 m a um máximo de 21 m. 63
82 8.2.2 Linha em Abandono (Durante Abandono no Mar) Durante uma situação de desconexão de emergência no NT Aliviador ou quando a conexão desta extremidade da linha no F(P)SO está danificada, pode ocorrer de a linha estar com apenas uma das extremidades afixada ao casco do F(P)SO. Neste caso a extremidade solta no mar é a extremidade que contém a NS Valve. Como a NS Valve tem um peso considerável, esta pode causar um afundamento nos mangotes das extremidades maior que o suportado pela camada de flutuação. Devido a este fato, esta é a condição crítica para o dimensionamento da linha de mangotes, pois o projeto deve ser tal que garanta o equilíbrio da linha sem que ocorra colapso dos elementos de mangote da extremidade, pois se isto ocorrer, será inevitável que aconteça o colapso progressivo da linha (Figura 8-2), até que toda ela afunde. Figura 8-2: Colapso Progressivo da Linha de Mangotes As condições ambientais atuantes, o ponto de conexão da linha, bem como a variação de calado do F(P)SO devem ser os mesmos utilizados na condição estivada. Figura 8-3: Configuração de Linha Abandoada no Mar 64
83 8.2.3 Linha em Offloading (Durante Transferência de Óleo) A situação de offloading é a configuração à qual a linha de mangotes estará sujeita durante a transferência de óleo. Nesta situação a linha estará conectada a dois navios, com dinâmicas diferentes. A distância entre os pontos de conexão das extremidades é limitada em seu valor máximo pelo comprimento da espia (hawser) e em seu valor mínimo pela distância mínima entre os navios. Os valores utilizados neste trabalho foram, respectivamente, 150 m e 90m (Figura 8-4). 90m 150m Figura 8-4: Distâncias Limite entre os Pontos de Conexão da Linha (Offloading) Para estas análises a condição ambiental de maior intensidade utilizada é a condição ambiental limite para offloading, definida no capítulo 4.5 como sendo geralmente a condição anual. O ponto de conexão e a variação de calado no F(P)SO serão os mesmos da situação em abandono. O NT Aliviador terá pontal de 21 m e calado variando de um mínimo de 6 m a um máximo de 16 m. As combinações de calados serão feitas de forma que quando o F(P)SO estiver com calado máximo o NT Aliviador estará com calado mínimo e viceversa, simulando uma situação aproximada de offloading. 65
84 8.3 DEFINIÇÃO DA CONFIGURAÇÃO DAS LINHAS MODELADAS Tipos de Mangotes Utilizados Os tipos de mangotes utilizados nesta análise e suas propriedades são baseados em mangotes comerciais de dupla carcaça, com classe de pressão de 21bar. Serão utilizados mangotes flutuantes e submarinos no corpo da linha, e um Tanker End na extremidade de conexão com o NT Aliviador, com propriedades para suportar a NS Valve, que será o único apêndice utilizado na linha. Tabela 8-1: Propriedades dos Mangotes Utilizados nas Simulações Propriedades dos Mangotes Submarino Flutuante Tanker End Comprimento (m) 10,67 10,67 10,67 Diâmetro Interno (m) 0,48 0,48 0,48 Peso no Ar com água do mar (ton/m) 0,319 0,432 0,365 Peso na Água (ton/m) 0,049-0,175-0,257 EA (kn) EI (knm^2) Os valores de C D e C M utilizados serão os mesmos do cilindro submerso, respectivamente 1,2 e 2. 66
85 8.3.2 Dimensionamento da Linha Proposta A definição da linha com flutuabilidade controlada deverá ser baseada no equilíbrio estático da linha em abandono, pois esta deverá se auto-sustentar sem que haja um afundamento tal, provocado pelo peso da válvula da extremidade, que possa provocar o colapso da camada de flutuação da linha. Após algumas tentativas foi escolhida a configuração descrita na Figura 8-5, que consiste em três (3) mangotes submarinos na extremidade sempre afixada ao F(P)SO, seguidos de onze (11) mangotes flutuantes, mais dois (2) mangotes submarinos e um (1) Tanker End, onde a NS Valve é afixada, finalizando a linha. Esta configuração foi a que apresentou melhor equilíbrio estático da linha, considerando a variação de calado do F(P)SO ao qual esta está conectada, sem que houvesse um afundamento médio muito grande dos elementos flutuantes adjacentes aos submarinos, conforme Figura 8-7 (calado máximo) e Figura 8-8 (calado mínimo). 3 Mangotes Submarinos 11 Mangotes Flutuantes; 2 Mangotes Submarinos 1 Mangote Tanker End; Figura 8-5: Linha de Mangotes Proposta (Flutuabilidade Controlada) Para fins de comparação foi definida uma linha convencional flutuante de mesmo comprimento, Figura 8-6, composta de dezesseis (16) mangotes flutuantes e um (1) Tanker End, onde a NS Valve é afixada, finalizando a linha. 16 Mangotes 1 Mangote Flutuantes; Tanker End; Figura 8-6: Linha de Mangotes Convencional (Totalmente Flutuante) 67

86 Figura 8-7: Equilíbrio Estático das Linhas (Calado Máximo do F(P)SO) Figura 8-8: Equilíbrio Estático das Linhas (Calado Mínimo do F(P)SO) A representação dos trechos de mangote será feita por cores distintas da seguinte forma: mangote flutuante laranja; mangote submarino verde; e Tanker End amarelo. Desta forma ficará fácil identificar as linhas nas representações que se seguirão, onde a linha convencional será toda laranja com apenas o Tanker End em amarelo e a linha proposta com flutuabilidade controlada apresentará as duas extremidades em catenária na cor verde. Para esta configuração foi analisada uma configuração extrema de onda e correnteza centenária, de forma a verificar a dinâmica de ambas as linhas sob a mesma condição ambiental atuante. Os valores utilizados foram: Correnteza = 2,1 m/s e Onda Irregular Hs = 7,8 m; Tp = 16 m; Gamma = 2,2 (espectro de Jonswap). Os principais resultados a serem observados são as curvaturas ao longo da linha e tração na extremidade conectada ao F(P)SO. Na Figura 8-9, apresentam-se os resultados de curvatura para a condição centenária, na situação em que a NS Valve está abandonada no mar. A primeira coluna apresenta o resultado da linha convencional flutuante, sendo o gráfico da primeira linha referente ao calado mínimo do F(P)SO e o da segunda linha ao calado máximo. Na segunda coluna apresentam-se os gráficos da linha proposta, com flutuabilidade controlada, seguindo a mesma distribuição de calados do F(P)SO nas linhas. 68
87 As simulações também foram feitas para a situação de calado intermediário do F(P)SO, porém apenas os calados extremos serão apresentados. Baseado nos gráficos, pode se observar uma redução bastante significativa de curvaturas máximas e até nas médias na extremidade conectada ao F(P)SO em ambos os calados, embora esta redução seja maior no calado máximo, pois o equilíbrio da linha permite uma catenária maior nesta extremidade, e portanto, uma maior capacidade de absorção da dinâmica imposta pelas ondas. Curvatura - Correnteza (2,1 m/s) Onda (Jonswap; Hs=7,8; Tp=16s e Gamma = 2,2) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-9: Curvatura ao Longo das Linhas Estudadas, na Configuração com a NS Valve Abandonada no Mar (C = 2,1m/s Hs 7,8m; Tp 16s; G 2,2) Nos gráficos da Figura 8-9, foi marcada com retângulos em azul, a região da extremidade solta no mar, com a NS Valve. Pode-se observar que o nível de tensões é baixo, e apresentam basicamente o mesmo valor para ambas as linhas. A linha com flutuabilidade controlada apresenta uma região maior com variação de curvatura, que se deve a sua própria geometria em catenária. 69

88 A Figura 8-10 apresenta gráficos de tração na extremidade conectada ao F(P)SO. Notase claramente uma redução significativa de amplitude de tração da linha proposta em relação à linha convencional, principalmente no calado máximo. Tração - Correnteza (2,1 m/s) Onda (Jonswap; Hs=7,8; Tp=16s e Gamma = 2,2) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-10: Tração na Conexão Afixada ao F(P)SO, na Configuração com a NS Valve Abandonada no Mar (C = 2,1m/s Hs 7,8m; Tp 16s; G 2,2) A Figura 8-11 mostra o rastro de movimentos de ambas as linhas sob a condição centenária de onda e correnteza. Percebe-se nitidamente a maior dinâmica da linha convencional flutuante. 70
 Visando verificar o efeito isolado da onda, serão apresentados resultados de uma simulação feita apenas com a onda centenária")
SO, Figura 8-14, e as imagens do rastro de posições")

89 Calado Mínimo Calado Máximo Figura 8-11: Rastro de Movimentos de Ambas as Linhas Próximo ao F(P)SO (C = 2,1m/s Hs 7,8m; Tp 16s; G 2,2) Visando verificar o efeito isolado da onda, serão apresentados resultados de uma simulação feita apenas com a onda centenária e corrente nula. Os gráficos de curvatura, Figura 8-13, tração na extremidade com o F(P)SO, Figura 8-14, e as imagens do rastro de posições espaciais das linhas, Figura 8-12, mostram que sem a correnteza, ambas as linhas tem uma amplificação dinâmica, porém a linha proposta apresenta uma vantagem ainda maior na minimização de curvaturas e trações em relação a linha convencional. Calado Mínimo Calado Máximo Figura 8-12: Rastro de Movimentos de Ambas as Linhas Próximo ao F(P)SO (sem Correnteza Hs 7,8m; Tp 16s; G 2,2) 71
 Tração Sem Correnteza Onda (Jonswap; Hs=7,8; Tp=16s e Gamma = 2,2) Linha Convencional")
90 Curvatura - Sem Correnteza Onda (Jonswap; Hs=7,8; Tp=16s e Gamma = 2,2) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-13: Curvatura ao Longo das Linhas Estudadas, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 7,8m; Tp 16s; G 2,2) Tração Sem Correnteza Onda (Jonswap; Hs=7,8; Tp=16s e Gamma = 2,2) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-14: Tração na conexão afixada ao F(P)SO, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 7,8m; Tp 16s; G 2,2) 72
91 Tração Sem Correnteza Onda (Jonswap; Hs=7,8; Tp=16s e Gamma = 2,2) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-15: Profundidades das Linhas de Mangotes ao Longo do Comprimento na Situação de Onda Centenária Baseado nos resultados de profundidades da situação extrema de ondas, Figura 8-15, em que as profundidades máximas observadas para o Tanker End (destacadas por retângulos laranja) chegam a apresentar valores um pouco superiores para a linha convencional, conclui-se que a linha proposta suporta a situação extrema de abandono no mar, sujeita a dinâmica imposta por uma condição ambiental de recorrência centenária, sem risco de colapso. Os retângulos azuis representam os mangotes submarinos da catenária da linha proposta. Os resultados de curvaturas e trações também revelam um grande indicativo da redução da dinâmica das extremidades na linha proposta com flutuabilidade diferenciada em relação à linha convencional totalmente flutuante. 73
92 8.3.3 Simulações - Linha em Abandono A situação de linha de mangotes em abandono é uma situação de emergência, provisória, portanto a probabilidade de ocorrência de uma situação centenária é muito baixa. Ainda assim, no dimensionamento já foram feitas algumas situações com uma condição centenária. Neste capítulo, as condições das análises numéricas serão determinadas visando observar o comportamento das linhas perante a variação de alguns parâmetros em torno da condição anual Travado Sem correnteza Onda (2,5m; 9,3s; G2,14) Curvatura - Sem Correnteza Onda (Jonswap; Hs=2,5m; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-16: Curvatura ao Longo das Linhas Estudadas, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 2,5m; Tp 9,3s; G 2,14) 74
SO, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 2,5m; Tp 9,3s; G 2,14) 75")
93 Tração Sem Correnteza Onda (Jonswap; Hs=2,5; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-17: Tração na Conexão Afixada ao F(P)SO, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 2,5m; Tp 9,3s; G 2,14) 75
94 Travado Sem correnteza Onda (3,375m; 9,3s; G2,14) Esta condição é basicamente idêntica a condição anterior, o único parâmetro alterado foi a altura de onda que foi alterada de 2,5 m para 3,375 m. Curvatura - Sem Correnteza Onda (Jonswap; Hs=3,375m; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-18: Curvatura ao Longo das Linhas Estudadas, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 3,375m; Tp 9,3s; G 2,14) 76
SO, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 3,375m; Tp 9,3s; G 2,14) 77")
95 Tração Sem Correnteza Onda (Jonswap; Hs=3,375; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-19: Tração na Conexão Afixada ao F(P)SO, na Configuração com a NS Valve Abandonada no Mar (sem Correnteza Hs 3,375m; Tp 9,3s; G 2,14) 77
96 Travado Correnteza 2,1 m/s Onda (3,375m; 9,3s; G2,14) Esta condição é basicamente idêntica a condição anterior, o único parâmetro alterado foi o acréscimo de uma correnteza de 2,1 m/s. Curvatura Correnteza 2,1 m/s Onda (Jonswap; Hs=3,375m; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-20: Curvatura ao Longo das Linhas Estudadas, na Configuração com a NS Valve Abandonada no Mar (Correnteza 2,1 m/s Hs 3,375m; Tp 9,3s; G 2,14) 78
SO, na Configuração com a NS Valve Abandonada no Mar (Correnteza 2,1 m/s Hs 3,375m; Tp 9,3s; G")
97 Tração Correnteza 2,1 m/s Onda (Jonswap; Hs=3,375m; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-21: Tração na Conexão Afixada ao F(P)SO, na Configuração com a NS Valve Abandonada no Mar (Correnteza 2,1 m/s Hs 3,375m; Tp 9,3s; G 2,14) 79
98 Movimento Imposto C= 2,1 m/s O= (3,375m; 9,3s; G2,14) Esta condição é basicamente idêntica a condição anterior, o único parâmetro alterado foi a imposição de movimento harmônico na extremidade de período de 12,5 s e amplitude de 5 m. Curvatura Mov. Imposto C= 2,1 m/s O= (JS; Hs=3,375m; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-22: Curvatura ao Longo das Linhas Estudadas, na Configuração com a NS Valve Abandonada no Mar (Mov.Imp.- C 2,1 m/s Hs 3,375m; Tp 9,3s; G 2,14) Nesta configuração, conforme observado na Figura 8-22, aconteceu de a linha flutuante apresentar grandes curvaturas em todo seu comprimento no calado máximo do F(P)SO, devido à imposição de movimentos no topo. O mesmo não ocorreu com a linha proposta com flutuabilidade controlada, que se comportou normalmente, com níveis de curvaturas normais. 80
 Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo")
99 Tração Mov. Imposto C= 2,1 m/s O= (JS; Hs=3,375m; Tp=9,3s e G = 2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-23: Tração na Conexão Afixada ao F(P)SO, na Configuração com a NS Valve Abandonada no Mar (Mov.Imp.- C 2,1 m/s Hs 3,375m; Tp 9,3s; G 2,14) 81
100 8.3.4 Simulações - Linha Esivada A situação de linha de mangotes estivada no mar é a situação a qual a linha estará sujeita durante a maior parte de sua vida, portanto foi a qual realizou-se o maior búmero de simulações numéricas, porém, apenas algumas serão apresentadas neste capítulo, visando observar o comportamento das linhas perante a variação de alguns parâmetros Travado Sem correnteza Onda (2,5m; 9,3s; G2,14) Curvatura - Sem Correnteza Onda (Jonswap; Hs=2,5m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-24: Curvatura ao Longo das Linhas Estudadas, na Configuração Estivada no Mar (sem Correnteza Hs 2,5m; Tp 12,5s; G 1,8) 82
SO, na Configuração Estivada no Mar (sem Correnteza Hs 2,5m; Tp")
 83")
101 Tração Sem Correnteza Onda (Jonswap; Hs=2,5m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-25: Tração na Conexão Sempre Afixada ao F(P)SO, na Configuração Estivada no Mar (sem Correnteza Hs 2,5m; Tp 12,5s; G 1,8) Tração Sem Correnteza Onda (Jonswap; Hs=2,5m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-26: Tração na Conexão com NS Valve, na Configuração Estivada no Mar (sem Correnteza Hs 2,5m; Tp 12,5s; G 1,8) 83
102 Travado Sem correnteza Onda (4m; 12,5s; G1,8) Esta condição é basicamente idêntica a condição anterior, o único parâmetro alterado foi a altura de onda que foi alterada de 2,5 m para 4 m. Curvatura - Sem Correnteza Onda (Jonswap; Hs=4m; Tp=912,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-27: Curvatura ao Longo das Linhas Estudadas, na Configuração Estivada no Mar (sem Correnteza Hs 4m; Tp 12,5s; G 1,8) 84
SO, na Configuração Estivada no Mar (sem Correnteza Hs 4m; Tp 12,5s; G 1,8) Tração Sem Correnteza Onda (Jonswap; Hs=4m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com")
103 Tração Sem Correnteza Onda (Jonswap; Hs=4m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-28: Tração na Conexão Sempre Afixada ao F(P)SO, na Configuração Estivada no Mar (sem Correnteza Hs 4m; Tp 12,5s; G 1,8) Tração Sem Correnteza Onda (Jonswap; Hs=4m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-29: Tração na Conexão com NS Valve, na Configuração Estivada no Mar (sem Correnteza Hs 4m; Tp 12,5s; G 1,8) 85
 Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-30: Curvatura ao Longo das")
104 Travado Correnteza 2,1m/s Onda (4m; 12,5s; G1,8) Esta condição é basicamente idêntica a condição anterior, o único parâmetro alterado foi a inclusão de uma correnteza de 2,1 m/s. Curvatura Correnteza 2,1m/s Onda (Jonswap; Hs=4m; Tp=912,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-30: Curvatura ao Longo das Linhas Estudadas, na Configuração Estivada no Mar (Correnteza 2,1m/s Hs 4m; Tp 12,5s; G 1,8) Nesta condição, com a inclusão da correnteza, aparece uma grande curvatura no meio da linha, marcada nos gráficos da Figura 8-30 com retângulos azuis, que tem basicamente o mesmo valor em ambas as linhas. Figura 8-31: Região da Linha Estivada com Grande Curvatura sob Correnteza 86
SO, na Configuração Estivada no Mar (Correnteza 2,1m/s Hs 4m; Tp")
 87")
105 Tração Correnteza 2,1m/s Onda (Jonswap; Hs=2,5m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-32: Tração na Conexão Sempre Afixada ao F(P)SO, na Configuração Estivada no Mar (Correnteza 2,1m/s Hs 4m; Tp 12,5s; G 1,8) Tração Correnteza 2,1m/s Onda (Jonswap; Hs=2,5m; Tp=12,5s e G = 1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-33: Tração na Conexão com NS Valve, na Configuração Estivada no Mar (Correnteza 2,1m/s Hs 4m; Tp 12,5s; G 1,8) 87
106 Movimento Imposto C= 2,1 m/s O= (4m; 12,5s; G1,8) Esta condição é basicamente idêntica a condição anterior, o único parâmetro alterado foi a imposição de movimento harmônico na extremidade de período de 12,5 s e amplitude de 5 m. Curvatura Mov. Imposto C= 2,1 m/s O= (JS; Hs=4m; Tp=12,5s e G =1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-34: Curvatura ao Longo das Linhas Estudadas, na Configuração Estivada no Mar (Mov. Imp. - C 2,1 m/s Hs 4m; Tp 12,5s; G 1,8) Nesta configuração, conforme observado na Figura 8-34, aconteceu de a linha flutuante apresentar uma curvatura excessiva em uma das extremidades na situação de calado mínimo do F(P)SO, devido à imposição de movimentos no topo. O mesmo não ocorreu com a linha proposta com flutuabilidade controlada, que se comportou normalmente, com níveis de curvaturas normais. 88
 Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado")
 Mínimo Figura 8-36: Tração na Conexão com NS Valve, na Configuração Estivada no Mar (Mov.Imp.")
107 Tração Mov. Imposto C= 2,1 m/s O= (JS; Hs=4m; Tp=12,5s e G =1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-35: Tração na Conexão sempre Afixada ao F(P)SO, na Configuração Estivada no Mar (Mov.Imp.- C 2,1 m/s Hs 4m; Tp 12,5s; G 1,8) Tração Mov. Imposto C= 2,1 m/s O= (JS; Hs=4m; Tp=12,5s e G =1,8) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-36: Tração na Conexão com NS Valve, na Configuração Estivada no Mar (Mov.Imp.- C 2,1 m/s Hs 4m; Tp 12,5s; G 1,8) 89
108 8.3.5 Simulações - Linha em Offloading A situação de linha de mangotes durante operação de offloading é a situação ideal a qual a linha deverá trabalhar. As principais variáveis são a distancia entre o F(P)SO e o NT Aliviador, a dinâmica imposta pelos dois corpos, e a variação de calados destes. Foram simulados casos com distância entre as unidades de 90m e 150m. A condição denominada de calado máximo representa o calado máximo do F(P)SO (21m) concomitante com o calado mínimo do NT Aliviador (6m) e a de calado mínimo, representa o calado mínimo do F(P)SO (8m) com o máximo do NT Aliviador (16m). Somente algumas simulações numéricas realizadas serão apresentadas neste capítulo, visando observar o comportamento das linhas perante a variação de alguns parâmetros L=90m - Travado Sem correnteza O= (3,375m; 9,3s; G2,14) Curvatura L=90m - Travado C=0 O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-37: Curvatura ao Longo das Linhas Estudadas, na Configuração em Offloading (Travado- L=90 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14) 90
SO, na Configuração em Offloading (Travado- L=90 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14)")
 91")
109 Tração L=90m - Travado C=0 O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-38: Tração na Conexão do F(P)SO, na Configuração em Offloading (Travado- L=90 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14) Tração L=90m - Travado C=0 O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-39: Tração na Conexão com o NT Aliviador na Configuração em Offloading (Travado- L=90 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14) 91
110 L=150m - Travado Sem Correnteza O= (3,375m; 9,3s; G2,14) Curvatura L=150m - Travado C=0 O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-40: Curvatura ao Longo das Linhas Estudadas, na Configuração em Offloading (Travado- L=150 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14) Na condição de offloading, a linha proposta, com flutuabilidade controlada, tem menores curvaturas nas extremidades e menores trações nas extremidades, de forma análoga às configurações da linha em abandono e em estiva no mar. A distância entre o F(P)SO e o NT Aliviador ser 90 m ou 150 m, não causou grandes diferenças nos resultados dos casos simulados sem correnteza. 92
SO, na Configuração em Offloading (Travado- L=150 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14)")
 93")
111 Tração L=150m - Travado C=0 O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-41: Tração na Conexão do F(P)SO, na Configuração em Offloading (Travado- L=150 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14) Tração L=150m - Travado C=0 O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-42: Tração na Conexão com o NT Aliviador na Configuração em Offloading (Travado- L=150 m - C 0 m/s Hs 3,375m; Tp 12,5s; G 2,14) 93
 Curvatura L=90m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado")
112 L=90m - Travado C= 1,1m/s O= (3,375m; 9,3s; G2,14) Curvatura L=90m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-43: Curvatura ao Longo das Linhas Estudadas, na Configuração em Offloading (Travado- L=90 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) Sob uma correnteza alinhada de 1,1 m/s e com uma distancia de 90 m entre os pontos de conexão das linhas, se observa uma curvatura, na parte flutuante de ambas as linhas, conforme Figura A intensidade destas curvaturas pode ser observada na Figura 8-43, destacada por retângulos azuis. Figura 8-44: Curvatura das Linhas de Mangotes durante Offloading (L=90 m) 94
SO, na Configuração em Offloading (Travado- L=90 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14)")
 95")
113 Tração L=90m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-45: Tração na Conexão do F(P)SO, na Configuração em Offloading (Travado- L=90 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) Tração L=90m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-46: Tração na Conexão com o NT Aliviador na Configuração em Offloading (Travado- L=90 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) 95
 Curvatura L=150m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado")
114 L=150m - Travado C= 1,1 m O= (3,375m; 9,3s; G2,14) Curvatura L=150m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-47: Curvatura ao Longo das Linhas Estudadas, na Configuração em Offloading (Travado- L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) Sob a mesma condição do caso anterior, mas com uma distancia de 150 m entre os pontos de conexão, se observa uma curvatura nas extremidades das linhas, conforme Figura Na linha proposta, a curvatura acontece sobre os mangotes submarinos da catenária, fazendo com que esta linha apresente menores níveis de curvatura. Figura 8-48: Curvatura das Linha de Mangotes durante Offloading (L=150 m) 96
SO, na Configuração em Offloading (Travado- L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) Tração L=150m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante")
115 Tração L=150m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-49: Tração na Conexão do F(P)SO, na Configuração em Offloading (Travado- L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) Tração L=150m - Travado C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-50: Tração na Conexão com o NT Aliviador na Configuração em Offloading (Travado- L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) 97
 Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-51: Curvatura ao Longo das Linhas")
116 L=150m Mov.Imposto C= 1,1 m O=(3,375m; 9,3s; G2,14) Curvatura L=150m Mov. Imp. C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-51: Curvatura ao Longo das Linhas Estudadas, na Configuração em Offloading (Mov. Imposto - L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) \ 98
 Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-52: Tração na Conexão do F(P)SO, na")
117 Tração L=150m Mov. Imp C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-52: Tração na Conexão do F(P)SO, na Configuração em Offloading (Mov. Imposto - L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) Tração L=150m Mov. Imp C=1,1m/s O= (JS; Hs=3,375; Tp=9,3s e G =2,14) Linha Convencional Flutuante Linha com Flutuabilidade Controlada Calado Máximo Calado Mínimo Figura 8-53: Tração na Conexão com o NT Aliviador na Configuração em Offloading (Mov. Imposto - L=150 m - C=1,1m/s Hs 3,375m; Tp 12,5s; G 2,14) 99


118 9 ENSAIOS COM MODELO REDUZIDO 9.1 DESCRIÇÃO DO TANQUE Os ensaios com modelo reduzido foram realizados no Tanque de Provas do Laboratório de Hidrodinâmica do Agrupamento de Engenharia Naval e Oceânica do IPT. O tanque consiste de um canal de reboque de 280 m de comprimento por 6 m de largura e com uma profundidade de 4 m, dotado de um gerador de ondas em uma das extremidades e um absorvedor na outra. Um carro dinamométrico percorre toda a extensão do tanque, simulando velocidade de avanço de embarcações ou correnteza sobre as estruturas ensaiadas. Figura 9-1: Tanque de Reboque do IPT 100

119 9.2 INSTRUMENTAÇÃO Em cada ensaio, foram registrados os valores de tração e o ângulo com a vertical das extremidades afixadas da linha. Em cada extremidade da linha, conectada ao carro dinanométrico, foi colocado um bloco de força para medição da tração. Junto ao ponto de fixação e 10 cm adiante, no sentido do comprimento da linha de mangotes, também foram instalados dispositivos led, de forma a determinar o ângulo de saída com a vertical da linha, a partir da composição das posições espaciais destes dispositivos lida por uma câmera especial. Na Figura 9-2 é mostrado o detalhe da instrumentação utilizada na extremidade da linha de mangote conectada no carro dinamométrico. Na foto a flecha amarela indica a célula de carga que mede a força de tração enquanto a flecha vermelha indica os dispositivos led. Figura 9-2: Detalhe da Instrumentação 101
120 Em todos os ensaios o plano de flutuação do mangote e o setor submerso próximo ao F(P)SO foram registrados em vídeo, permitindo avaliar o movimento desta região nas duas linhas. Também foi registrado, na condição de abandono, o movimento da extremidade com peso submerso adicionado, simulando a NS Valve, de forma a avaliar visualmente a amplitude dos movimentos e a profundidade máxima que esta pode atingir. A descrição da instrumentação é dada a seguir: a) sistema ótico de medição de posição, constituído de dois dispositivos led, uma câmera sensora e condicionador de sinais; b) bloco de força com fundo de escala 2 Kg, para medir a força de tração no topo da linha; c) câmera de vídeo submarina digital, para registrar a configuração submersa da linha próximo ao navio cisterna; d) câmeras de vídeo digital para registro da configuração da linha na superfície. Figura 9-3: Arranjos das Diferentes Condições de Linhas Ensaiadas no Carro Dinamométrico do Tanque de Provas 102

121 9.3 MODELOS E CONFIGURAÇÕES ENSAIADAS Os modelos foram construídos em uma escala 1:25 em relação aos protótipos das duas linhas, respeitando a similaridade cinemática descrita no Anexo 3, e foram ajustados com relação ao peso submerso, dimensões externas, rigidez axial e rigidez flexional do modelo. Os valores utilizados são apresentados na Tabela 9-1 tanto da escala real quanto na escala do modelo. Tabela 9-1: Características dos Tipos de Mangotes Ensaiados (Escala 1:25) Escala Real Escala Reduzida (1:25) Propriedades Tipo A Tipo B Tipo C Tipo A Tipo B Tipo C Comprimento (m) 10,67 10,67 10,67 0,4268 0,4268 0,4268 Diâmetro (m) 0,569 0,87 0,849 0,0228 0,0348 0,034 Peso Linear Submerso (kn/m) 0,479-1,721-2,518 0,0008-0,0028-0,004 Peso linear no Ar (kn/m) 3,133 4,239 3,576 0,005 0,0068 0,0057 EA (kn) ,4224 0,4224 0,4224 EI (knm 2 ) ,15E-05 2,15E-05 2,15E-05 Os modelos de mangotes foram produzidos por um processo de extrusão vulcanizados em estufa, sendo que os mangotes submersos foram feitos de borracha maciça e os flutuantes de borracha esponjosa. As conexões entre os mangotes (representando os flanges) foram feitas em polímero PVC, usinadas em um torno para adequação do diâmetro. Figura 9-4: Modelo do Mangote e do Flange 103
SO e o NT Aliviador nos ensaios foi o calado intermediário, respectivamente 14,5 m e 11 m, pois esta é a condição que melhor representa o")

122 O ajuste do peso submerso foi conseguido através da distribuição de pequenos lastros de chumbo em um fio de polímero nylon ao longo do comprimento dos mangotes. O calado considerado para o F(P)SO e o NT Aliviador nos ensaios foi o calado intermediário, respectivamente 14,5 m e 11 m, pois esta é a condição que melhor representa o comportamento médio da linha. A Figura 9-5 mostra uma imagem esquemática da disposição da linha de mangotes no tanque de reboque em sua configuração estivada. A Figura 9-6 apresenta uma fotografia com a linha flutuante equivalente posicionada. Figura 9-5: Figura Esquemática da Configuração Estivada Figura 9-6: Modelo da Configuração Estivada 104


123 A Figura 9-7 mostra uma imagem esquemática da disposição da linha de mangotes no tanque de reboque em sua configuração em abandono no mar. A Figura 9-8 apresenta uma fotografia com a linha flutuante equivalente posicionada. Figura 9-7: Figura Esquemática da Configuração em Abandono Figura 9-8: Modelo da Configuração em Abandono 105

124 A Figura 9-9 apresenta esquema de montagem da configuração da linha durante operação de offloading, atentando para a utilização de um carro dinanométrico auxiliar para representar o NT Aliviador. Este carro também possui um mecanismo para imposição de movimentos na extremidade da linha. Figura 9-9: Figura Esquemática da Configuração em Offloading 106
125 9.4 CONDIÇÕES ENSAIADAS Foram feitos ensaios variando alguns parâmetros para que fosse possível verificar o comportamento das duas linhas nas mesma condições. Aqui serão apresentadas as condições ensaiadas visando comparar a linha proposta, com flutuação controlada nas extremidades, em relação à linha flutuante convencional equivalente. A correnteza foi o principal parâmetro alterado pois com o acrescimo da velocidade de correnteza a geometria das linhas tende a se aproximar, e com isto a redução da dinâmica da linha proposta em relação à linha convencional tende a ser menor. Foram feitos ensaios sem correnteza e com correntezas de 0,7, 1,1 e 2,1 m/s. Nestes ensaios foram feitos casos com as extremidades das linhas travadas e com imposição de um movimento oscilatório regular de período 12,5 segundos e amplitude 5 metros, para tentar investigar a influência de um movimento aproximado do ponto de conexão das linhas no FPSO. Em cada ensaio, foram registrados os valores de tração na extremidade que está sempre presa ao FPSO (oposta à extremidade com a NS Valve) e as posições dos dispositivos led que fornecem o ângulo com a vertical dessa extremidade da linha. A Tabela 9-2 apresenta as condições para as quais as linhas foram ensaiadas na configuração estivada. A Tabela 9-3 apresenta as condições da configuração em offloading, e a Tabela 9-4 as condições da configuração em abandono. Em todas as condições, a onda incidente considerada é uma onda irregular com espectro de distribuição de Jonswap. Também foram realizados ensaios de onda transiente, que consiste em submeter o modelo em repouso a uma excitação de um conjunto de ondas de tal forma que se pode obter uma estimativa da curva de resposta do modelo em algumas freqüências de interesse. Estes ensaios foram realizados para as duas linhas, com o objetivo de comparação de resposta em termos de tração no topo e ângulo com a vertical junto ao FPSO. 107
126 Tabela 9-2: Configuração Estivada - Condições Ensaiadas Onda Irregular Corrente Movimento Hs Tp Gamma Velocidade na (m) (s) (m/s) extremidade 2,5 12,5 1,8 0 Travado 2,5 12,5 1,8 0,7 Travado 2,5 12,5 1,8 2,1 Travado 4 12,5 1,8 0 Travado 4 12,5 1,8 0,7 Travado 4 12,5 1,8 2,1 Travado 2,5 12,5 1,8 0 Mov.Imposto 2,5 12,5 1,8 0,7 Mov.Imposto 2,5 12,5 1,8 2,1 Mov.Imposto 4 12,5 1,8 0 Mov.Imposto 4 12,5 1,8 0,7 Mov.Imposto 4 12,5 1,8 2,1 Mov.Imposto Tabela 9-3: Configuração em Offloading - Condições Ensaiadas Onda Irregular Corrente Movimento Hs Tp Gamma Velocidade na (m) (s) (m/s) extremidade 3,375 9,3 2,2 0 Travado 3,375 9,3 2,2 1,1 Travado 3,375 9,3 2,2 0 Mov.Imposto 3,375 9,3 2,2 1,1 Mov.Imposto Tabela 9-4: Configuração em Abandono - Condições Ensaiadas Onda Irregular Corrente Movimento Hs Tp Gamma Velocidade na (m) (s) (m/s) extremidade 2,5 9,3 2,14 0 Travado 2,5 9,3 2,14 0,7 Travado 2,5 9,3 2,14 2,1 Travado 3,375 9,3 2,14 0 Travado 3,375 9,3 2,14 0,7 Travado 3,375 9,3 2,14 2,1 Travado 2,5 9,3 2,14 0 Mov.Imposto 2,5 9,3 2,14 0,7 Mov.Imposto 2,5 9,3 2,14 2,1 Mov.Imposto 3,375 9,3 2,14 0 Mov.Imposto 3,375 9,3 2,14 0,7 Mov.Imposto 3,375 9,3 2,14 2,1 Mov.Imposto 108
127 9.5 RESULTADOS OBTIDOS Onda Transiente Os resultados dos ensaios de onda transiente para a força de tração e ângulos com a vertical são apresentados na Figura Foi realizado ensaio em onda regular para se ter uma referência no ensaio de onda transiente. Linha Convencional Flutuante Linha com Flutuabilidade Controlada Ângulo com a Vertical Tração Figura 9-10: Estimativa de Curva de Reposta - Transiente Observando as curvas de resposta tanto de tração quanto de ângulos com a vertical, verifica-se que os valores apresentados para a linha com flutuabilidade controlada chegam a ser aproximadamente três (3) vezes menores que os valores da linha flutuante convencional para os mesmos períodos. 109
128 9.5.2 Configuração Estivada A Tabela 9-5 apresenta os valores máximos de tração na extremidade sempre conectada ao F(P)SO para a linha convencional flutuante e para a linha com flutuabilidade controlada sob as mesmas condições. Os valores de desvio padrão de tração também são apresentados visando comparar a dinâmica nas extremidades. Tabela 9-5: Configuração Estivada Resultados de Tração da Extremidade Onda Irregular Corrente Movimento Tração Hs Tp Gamma Velocidade na Max (kn) St.dev.(kN) (m) (s) (m/s) extremidade Convenc. Flut.Contr. Redução Convenc. Flut.Contr. Redução 4 12,5 1,8 0 Travado 73,73 35,20 52% 16,49 3,40 79% 4 12,5 1,8 0,7 Travado 80,31 44,64 44% 16,57 4,86 71% 4 12,5 1,8 2,1 Travado 88,25 53,71 39% 12,65 7,76 39% 2,5 12,5 1,8 0 Travado 65,93 33,77 49% 12,16 2,03 83% 2,5 12,5 1,8 0,7 Travado 73,14 32,89 55% 11,09 2,97 73% 2,5 12,5 1,8 2,1 Travado 82,47 35,56 57% 9,06 5,22 42% 4 12,5 1,8 0 Mov.Imposto 111,78 59,78 47% 26,32 9,52 64% 4 12,5 1,8 0,7 Mov.Imposto 103,69 63,52 39% 25,05 12,40 50% 4 12,5 1,8 2,1 Mov.Imposto 122,87 78,63 36% 24,16 13,02 46% 2,5 12,5 1,8 0 Mov.Imposto 99,49 60,44 39% 24,16 8,34 65% 2,5 12,5 1,8 0,7 Mov.Imposto 105,71 58,98 44% 24,67 10,15 59% 2,5 12,5 1,8 2,1 Mov.Imposto 121,59 68,71 43% 21,21 11,59 45% A Tabela 9-6 apresenta os valores máximos e de desvio padrão de ângulo da extremidade com a vertical. Tabela 9-6: Configuração Estivada Resultados de Ângulo da Extremidade Onda Irregular Corrente Movimento Ângulo Hs Tp Gamma Velocidade na Max ( o ) St.dev.( o ) (m) (s) (m/s) extremidade Convenc. Flut.Contr. Redução Convenc. Flut.Contr. Redução 4 12,5 1,8 0 Travado 19,55 3,62 81% 6,71 1,43 79% 4 12,5 1,8 0,7 Travado 25,11 9,54 62% 8,11 1,95 76% 4 12,5 1,8 2,1 Travado 29,45 20,75 30% 5,59 2,58 54% 2,5 12,5 1,8 0 Travado 17,35 1,96 89% 5,39 1,04 81% 2,5 12,5 1,8 0,7 Travado 26,82 5,59 79% 5,11 1,28 75% 2,5 12,5 1,8 2,1 Travado 30,36 16,69 45% 3,83 1,73 55% 4 12,5 1,8 0 Mov.Imposto 21,87 9,48 57% 7,23 3,43 53% 4 12,5 1,8 0,7 Mov.Imposto 29,36 15,91 46% 10,11 4,71 53% 4 12,5 1,8 2,1 Mov.Imposto 39,61 29,52 25% 9,74 5,07 48% 2,5 12,5 1,8 0 Mov.Imposto 16,60 7,67 54% 7,64 3,07 60% 2,5 12,5 1,8 0,7 Mov.Imposto 29,13 11,34 61% 10,12 3,84 62% 2,5 12,5 1,8 2,1 Mov.Imposto 40,29 24,66 39% 9,87 4,75 52% Como pode ser observado nas tabelas acima, a linha com flutuabilidade controlada, de maneira consistente com os ensaios de onda transiente, apresenta menores amplitudes dinâmicas tanto em tração quanto em ângulo 110
129 Esta diferença é maior quando não existe o efeito da correnteza, pois esta diminui a diferença de geometria das duas linhas, e consequentemente aproxima o comportamento destas. Porém, mesmo no caso de uma correnteza elevada, a linha proposta ainda apresenta resultados significativamente melhores que a linha convencional. A imposição de movimentos na extremidade da linha também reduz um pouco a vantagem da linha proposta em relação à linha convencional, porém os valores obtidos apresentam, ainda assim, reduções significativas. Os histogramas da Tabela 9-7 apresentam visualmente a redução dos valores máximos e de desvio padrão de tração para uma variedade de condições ambientais atuantes, com ou sem imposição de movimentos na extremidade. As barras vermelhas representam a linha convencional flutuante e as azuis, a linha proposta com flutuação controlada. Tabela 9-7: Histogramas de Tração na Configuração Estivada Força de Tração Corrente Travado Mov.Imposto Máxima Estivado - Força Máxima - com Mov. Travado Estivado - Força Máxima - com Mov. Imposto Flutuabilidade Controlada Flutuabilidade Controlada Mangote convencional Mangote convencional kn kn Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s 0 Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Desvio 12 Estivado - Força Desvio Padrão - com Mov. Travado Flutuabilidade Controlada 30 Estivado - Força Desvio Padrão - com Mov. Imposto Flutuabilidade Controlada Padrão 10 Mangote convencional 25 Mangote convencional 8 20 kn 6 kn Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s 0 Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s 111
130 º º º º Da mesma forma, na Tabela 9-8, são apresentadas as variações de ângulo com a vertical da extremidade conectada ao F(P)SO. Tabela 9-8: Histogramas de Ângulo com a Vertical na Configuração Estivada Ângulo com a Vertical Corrente Travado Mov.Imposto Máxima Estivado - Angulo Máximo - com Mov. Travado Estivado - Angulo Máximo - com Mov. Imposto Flutuabilidade Controlada Flutuabilidade Controlada Mangote convencional Mangote convencional Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s 0 Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Desvio 8 Estivado - Angulo Desvio Padrão - com Mov. Travado Flutuabilidade Controlada 12 Estivado - Angulo Desvio Padrão - com Mov. Imposto Flutuabilidade Controlada Padrão 7 6 Mangote convencional 10 Mangote convencional Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s 0 Hs=2.5m Hs=4m Hs=2.5m Hs=4m Hs=2.5m Hs=4m T=13s T=13s T=9.3s T=13s T=13s T=13s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Para exemplificar serão apresentados alguns exemplos de série temporal visando observar o efeito da variação de alguns parâmetros no comportamento dinâmico de ambas as linhas estudadas. Estes resultados são apresentados no Anexo 4, para todas as condições descritas na Tabela 9-2. A Tabela 9-9 mostra o efeito do aumento da correnteza na série temporal de tração de ambas as linhas para uma mesma onda. O efeito no ângulo com a vertical é mostrado na Tabela
131 Tabela 9-9: Séries Temporais de Tração com Variação de Correnteza Força (Hs = 4m, Tp = 12,5s, Gamma = 1,8 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 113
132 Tabela 9-10: Séries Temporais de Ângulo com Variação de Correnteza Ângulo (Hs = 4m, Tp = 12,5s, Gamma = 1,8 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s A Tabela 9-11 mostra o efeito da imposição de movimento na extremidade para uma mesma onda sem correnteza. O efeito no ângulo com a vertical é mostrado na Tabela
133 Tabela 9-11: Séries Temporais de Tração com e sem Imposição de Movimento Força - C=0m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Tabela 9-12: Séries Temporais de Ângulo com e sem Imposição de Movimento Ângulo - C=0m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 115
134 9.5.3 Configuração em Offloading A Tabela 9-13 apresenta os valores máximos de tração na extremidade conectada ao F(P)SO para a linha convencional flutuante e para a linha com flutuabilidade controlada sob as mesmas condições. Os valores de desvio padrão de tração também são apresentados visando comparar a dinâmica nas extremidades. Tabela 9-13: Configuração em Offloading Resultados de Tração da Extremidade Onda Irregular Corrente Movimento Tração Hs Tp Gamma Velocidade na Max (kn) St.dev.(kN) (m) (s) (m/s) extremidade Convenc. Flut.Contr. Redução Convenc. Flut.Contr. Redução 3,375 9,3 2,2 0 Travado 77,97 35,52 54% 18,51 2,58 86% 3,375 9,3 2,2 1,1 Travado 76,03 42,73 44% 17,13 4,81 72% 3,375 9,3 2,2 0 Mov.Imposto 107,13 66,55 38% 24,87 13,08 47% 3,375 9,3 2,2 1,1 Mov.Imposto 101,68 70,43 31% 23,34 14,94 36% A Tabela 9-14 apresenta os valores máximos e de desvio padrão de ângulo da extremidade com a vertical. Tabela 9-14: Configuração em Offloading Resultados de Ângulo da Extremidade Onda Irregular Corrente Movimento Ângulo Hs Tp Gamma Velocidade na Max ( o ) St.dev.( o ) (m) (s) (m/s) extremidade Convenc. Flut.Contr. Redução Convenc. Flut.Contr. Redução 3,375 9,3 2,2 0 Travado 8,44 5,85 31% 2,45 0,37 85% 3,375 9,3 2,2 1,1 Travado 19,79 11,13 44% 3,92 0,93 76% 3,375 9,3 2,2 0 Mov.Imposto 9,62 6,77 30% 4,05 1,97 51% 3,375 9,3 2,2 1,1 Mov.Imposto 24,02 17,57 27% 9,28 3,77 59% Como pode ser observado nas tabelas acima, a linha com flutuabilidade controlada, de maneira consistente com os ensaios de onda transiente e com os ensaios na configuração estivada, apresenta menores amplitudes dinâmicas tanto em tração quanto em ângulo. 116
135 Esta diferença é maior quando não existe o efeito da correnteza, pois esta diminui a diferença de geometria das duas linhas, e consequentemente aproxima o comportamento destas. Porém, mesmo no caso com correnteza, a linha proposta ainda apresenta resultados significativamente melhores que a linha convencional. A imposição de movimentos na extremidade da linha também reduz um pouco a vantagem da linha proposta em relação à linha convencional, porém os valores obtidos apresentam, ainda assim, reduções significativas. Os histogramas da Tabela 9-15 apresentam visualmente a redução dos valores máximos e de desvio padrão de tração para uma variedade de condições ambientais atuantes, com ou sem imposição de movimentos na extremidade. As barras vermelhas representam a linha convencional flutuante e as azuis, a linha proposta com flutuação controlada. Tabela 9-15: Histogramas de Tração na Configuração em Offloading Força de Tração Corrente Travado Mov.Imposto Máxima 80 Offloading - Força Máxima - Mov. Travado - Hs=3.375m T=9.3s Flutuabilidade Controlada 120 Offloading - Força Máxima - Mov. Imposto - Hs=3.375m T=9.3s Flutuabilidade Controlada 70 Mangote convencional Mangote convencional kn 40 kn V=0m/s V=1.1m/s 0 V=0m/s V=1.1m/s Desvio Padrão Offloading - Força Desvio Padrão - Mov. Travado - Hs=3.375m T=9.3s 25 Flutuabilidade Controlada Mangote convencional 20 Offloading - Força Desvio Padrão - Mov. Imposto - Hs=3.375m T=9.3s 25 Flutuabilidade Controlada Mangote convencional kn kn V=0m/s V=1.1m/s 0 V=0m/s V=1.1m/s 117
136 º º º º Da mesma forma, na Tabela 9-8, são apresentadas as variações de ângulo com a vertical da extremidade conectada ao F(P)SO. Tabela 9-16: Histogramas de Ângulo na Configuração em Offloading Ângulo com a Vertical Corrente Travado Mov.Imposto Máxima 20 Offloading - Angulo Máximo - Mov. Travado - Hs=3.375m T=9.3s Flutuabilidade Controlada 25 Offloading - Angulo Máximo - Mov. Imposto - Hs=3.375m T=9.3s Flutuabilidade Controlada 18 Mangote convencional Mangote convencional V=0m/s V=1.1m/s 0 V=0m/s V=1.1m/s Desvio Padrão Offloading - Angulo Desv. Padrão - Mov. Travado - Hs=3.375m T=9.3s 4.5 Flutuabilidade Controlada Mangote convencional Offloading - Angulo Desv. Padrão - Mov. Imposto - Hs=3.375m T=9.3s 9 Flutuabilidade Controlada Mangote convencional V=0m/s V=1.1m/s 0 V=0m/s V=1.1m/s Para exemplificar serão apresentados alguns exemplos de série temporal visando observar o efeito da variação de alguns parâmetros no comportamento dinâmico de ambas as linhas estudadas. Estes resultados são apresentados no Anexo 4, para todas as condições descritas na Tabela 9-2. A Tabela 9-17 mostra o efeito do aumento da correnteza na série temporal de tração de ambas as linhas para uma mesma onda. O efeito no ângulo com a vertical é mostrado na Tabela A Tabela 9-19 mostra o efeito da imposição de movimento na extremidade para uma mesma onda sem correnteza. O efeito no ângulo com a vertical é mostrado na Tabela
137 Tabela 9-17: Séries Temporais de Tração com Variação de Correnteza Força - Travado - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 1,1 m/s Tabela 9-18: Séries Temporais de Ângulo com Variação de Correnteza Ângulo - Travado - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 1,1 m/s 119
138 Tabela 9-19: Séries Temporais de Tração com e sem Imposição de Movimento Força C=0,0 m/s - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Tabela 9-20: Séries Temporais de Ângulo com e sem Imposição de Movimento Ângulo C=0,0 m/s - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 120
139 9.5.4 Configuração em Abandono no Mar A Tabela 9-21 apresenta os valores máximos de tração na extremidade conectada ao F(P)SO para a linha convencional flutuante e para a linha com flutuabilidade controlada sob as mesmas condições. Os valores de desvio padrão de tração também são apresentados visando comparar a dinâmica nas extremidades. Tabela 9-21: Configuração em Abandono Resultados de Tração da Extremidade Onda Irregular Corrente Movimento Tração Hs Tp Gamma Velocidade na Max (kn) St.dev.(kN) (m) (s) (m/s) extremidade Convenc. Flut.Contr. Redução Convenc. Flut.Contr. Redução 2,5 9,3 2,14 0 Travado 63,37 27,77 56% 10,64 0,11 99% 2,5 9,3 2,14 0,7 Travado 64,72 29,60 54% 11,32 1,37 88% 2,5 9,3 2,14 2,1 Travado 66,52 38,42 42% 9,80 4,07 58% 3,375 9,3 2,14 0 Travado 68,90 37,61 45% 12,82 2,42 81% 3,375 9,3 2,14 0,7 Travado 77,42 39,95 48% 11,59 3,24 72% 3,375 9,3 2,14 2,1 Travado 71,27 37,32 48% 11,62 4,47 62% 2,5 9,3 2,14 0 Mov.Imposto 101,39 31,17 69% 21,52 3,27 85% 2,5 9,3 2,14 0,7 Mov.Imposto 112,15 66,70 41% 24,78 13,24 47% 2,5 9,3 2,14 2,1 Mov.Imposto 102,82 69,44 32% 22,94 16,84 27% 3,375 9,3 2,14 0 Mov.Imposto 113,10 57,66 49% 22,58 12,37 45% 3,375 9,3 2,14 0,7 Mov.Imposto 97,03 65,38 33% 23,43 14,47 38% 3,375 9,3 2,14 2,1 Mov.Imposto 105,89 73,91 30% 24,22 17,37 28% A Tabela 9-22 apresenta os valores máximos e de desvio padrão de ângulo da extremidade com a vertical. Tabela 9-22: Configuração em Abandono Resultados de Ângulo da Extremidade Onda Irregular Corrente Movimento Ângulo Hs Tp Gamma Velocidade na Max ( o ) St.dev.( o ) (m) (s) (m/s) extremidade Convenc. Flut.Contr. Redução Convenc. Flut.Contr. Redução 2,5 9,3 2,14 0 Travado 7,70 0,26 97% 1,95 0,04 98% 2,5 9,3 2,14 0,7 Travado 10,65 2,01 81% 2,54 0,17 93% 2,5 9,3 2,14 2,1 Travado 13,03 8,19 37% 2,26 0,70 69% 3,375 9,3 2,14 0 Travado 11,02 2,01 82% 2,51 0,32 87% 3,375 9,3 2,14 0,7 Travado 13,87 5,30 62% 2,57 0,69 73% 3,375 9,3 2,14 2,1 Travado 15,97 8,52 47% 2,76 0,83 70% 2,5 9,3 2,14 0 Mov.Imposto 10,45 6,76 35% 2,68 0,50 81% 2,5 9,3 2,14 0,7 Mov.Imposto 25,63 8,96 65% 9,25 2,70 71% 2,5 9,3 2,14 2,1 Mov.Imposto 28,43 14,52 49% 9,78 4,33 56% 3,375 9,3 2,14 0 Mov.Imposto 9,28 6,93 25% 4,86 2,41 50% 3,375 9,3 2,14 0,7 Mov.Imposto 22,85 8,68 62% 8,82 2,77 69% 3,375 9,3 2,14 2,1 Mov.Imposto 28,60 16,61 42% 9,71 4,38 55% Como pode ser observado nas tabelas acima, a linha proposta, de maneira consistente com os ensaios de onda transiente e com os ensaios nas configurações estivada, e em offloading, apresenta menores amplitudes dinâmicas tanto em tração quanto em ângulo. 121
140 Novamente, esta diferença é maior quando não existe o efeito da correnteza, pois esta diminui a diferença de geometria das duas linhas, e consequentemente aproxima o comportamento destas. Porém, mesmo no caso de uma correnteza elevada, a linha proposta ainda apresenta resultados significativamente melhores que a linha convencional. Da mesma forma, a imposição de movimentos na extremidade da linha também reduz um pouco a vantagem da linha proposta em relação à linha convencional, porém os valores obtidos apresentam, ainda assim, reduções significativas. Os histogramas da Tabela 9-23 apresentam visualmente a redução dos valores máximos e de desvio padrão de tração para uma variedade de condições ambientais atuantes, com ou sem imposição de movimentos na extremidade. As barras vermelhas representam a linha convencional flutuante e as azuis, a linha proposta com flutuação controlada. 122
141 Tabela 9-23: Histogramas de Tração na Configuração em Abandono no Mar Força de Tração Corrente Travado Mov.Imposto Máxima Solto - Força Máxima - com Mov. Travado Solto - Força Máxima - com Mov. Imposto Flutuabilidade Controlada Flutuabilidade Controlada Mangote convencional Mangote convencional kn 40 kn Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=2.1m/s V=0.7m/s V=0.7m/s V=2.1m/s 0 Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Desvio 9 Solto - Força Desvio Padrão - com Mov. Travado Flutuabilidade Controlada 30 Solto - Força Desvio Padrão - com Mov. Imposto Flutuabilidade Controlada Padrão 8 7 Mangote convencional 25 Mangote convencional kn kn Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=2.1m/s V=0.7m/s V=0.7m/s V=2.1m/s 0 Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Da mesma forma, na Tabela 9-24, são apresentadas as variações de ângulo com a vertical da extremidade conectada ao F(P)SO. 123
142 º º º º Tabela 9-24: Histogramas de Ângulo na Configuração em Abandono no Mar Ângulo com a Vertical Corrente Travado Mov.Imposto Máxima Solto - Angulo Máximo - com Mov. Travado Solto - Angulo Máximo - com Mov. Imposto Flutuabilidade Controlada Flutuabilidade Controlada Mangote convencional Mangote convencional Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=2.1m/s V=0.7m/s V=0.7m/s V=2.1m/s 0 Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Desvio Padrão Solto - Angulo Desvio Padrão - com Mov. Travado Flutuabilidade Controlada Mangote convencional Solto - Angulo Desvio Padrão - com Mov. Imposto Flutuabilidade Controlada Mangote convencional Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m 0 Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m Hs=2.5m Hs=3.375m T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=2.1m/s V=0.7m/s V=0.7m/s V=2.1m/s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s T=9.3s V=0m/s V=0m/s V=0.7m/s V=0.7m/s V=2.1m/s V=2.1m/s Para exemplificar serão apresentados alguns exemplos de série temporal visando observar o efeito da variação de alguns parâmetros no comportamento dinâmico de ambas as linhas estudadas. Estes resultados são apresentados no Anexo 14, para todas as condições descritas na Tabela 9-4. A Tabela 9-25 mostra o efeito do aumento da correnteza na série temporal de tração de ambas as linhas para uma mesma onda. O efeito no ângulo com a vertical é mostrado na Tabela
143 Tabela 9-25: Séries Temporais de Tração com Variação de Correnteza Força (Hs = 3,375m, Tp = 9,3s, Gamma = 2,14 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 125
144 Tabela 9-26: Séries Temporais de Ângulo com Variação de Correnteza Ângulo (Hs = 3,375m, Tp = 9,3s, Gamma = 2,14 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s A Tabela 9-27 mostra o efeito da imposição de movimento na extremidade para uma mesma onda sem correnteza. O efeito no ângulo com a vertical é mostrado na Tabela
145 Tabela 9-27: Séries Temporais de Tração com e sem Imposição de Movimento Força - C=0m/s (Hs=3,375m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Tabela 9-28: Séries Temporais de Ângulo com e sem Imposição de Movimento Ângulo - C=0m/s (Hs=3,375m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 127
146 10 CONCLUSÕES E RECOMENDAÇÕES As análises realizadas neste estudo evidenciam a minimização da transmissão dos esforços dinâmicos provocado pelas ondas nas extremidades da linha de mangotes com flutuabilidade controlada em relação a linha totalmente flutuante. Isto foi possível graças a geometria em catenária das extremidades da linha proposta, que funciona como um absorvedor da dinâmica imposta ao trecho flutuante da linha. O projeto da linha apresentado no trabalho é uma configuração genérica desenvolvida apenas para provar a teoria das vantagens de uma linha com a geometria proposta em relação à linha convencional flutuante, porém projeto específico deverá ser desenvolvido para cada aplicação e características físicas dos componentes da linha. Outro cuidado deve ser tomado em relação a preservação da reserva de flutuabilidade da linha ao longo do tempo, para isto algumas alterações podem ser feitas ou cuidados devem ser tomados, em especial nos mangotes adjacentes ao trecho em catenária (Figura 10-1) das linhas que ficarão por muito tempo em abandono no mar. Figura 10-1: Principais Pontos de Atenção da Linha O ideal é a especificação de um material impermeável para a camada de flutuação, evitando o acúmulo de água e aumento do peso do mangote, e resistente a pressão externa, que embora seja pequena (Figura 10-2), pode ter aplicação constante ao longo da vida útil do mangote, causando a redução do raio externo e do deslocamento deste. 128
147 Figura 10-2: Pressão Externa do Mar sobre o Mangote Outro artifício a ser utilizado é a substituição dos primeiros mangotes flutuantes adjacentes ao trecho em catenária por mangotes submarinos com colares de flutuação, pois estes colares têm uma maior resistência à profundidade e, junto ao Tanker End, uma bóia poderá ser acrescentada para compensar o peso da NS Valve (Figura 10-3). Porém estas configurações com bóias e colares devem ser consideradas como provisórias, pois existe o inconveniente de a linha não poder ser recolhida facilmente a bordo e de ser relativamente fácil a perda destes apêndices no mar. Figura 10-3: Linha com Apêndices de Flutuação O estudo do comportamento hidrodinâmico de linhas de mangotes através de ensaios em Tanque de Provas pode fornecer subsídios para a simulação computacional destes fenômenos. Um estudo específico para determinação dos coeficientes hidrodinâmicos do mangote se faz importante para que se possa aprimorar a simulação do comportamento hidrodinâmico das linhas de mangotes, pois, conforme comentado no Capítulo 3.4, estes coeficientes são bastante conhecidos para um cilindro submerso porém muito pouco estudo foi realizado para cilindros na superfície livre. 129
148 Estudos com utilização de modelos de embarcações para simular as condições de contorno nas extremidades e de escoamento que o modelo de linha é submetido também podem contribuir em muito no entendimento do comportamento e no projeto da linha de mangotes. 130
149 11 ANEXO METODOLOGIA DE CÁLCULO NUMÉRICO Apresenta-se a seguir uma descrição um pouco mais detalhada sobre o sistema integrado para cálculo de linhas utilizado neste trabalho, o ORCAFLEX [35] Geração do Modelo Os dados de entrada requeridos para a análise dinâmica de linhas são os seguintes: Dados referentes ao plano de fundo através de três pontos e de uma profundidade média do local. Dados correspondentes às linhas: coordenadas dos pontos extremos de cada linha, propriedade físicas dos diversos segmentos que compõem cada linha (comprimento, número de elementos finitos para discretização). Dados referentes às forças externas atuantes causadas por onda, vento e corrente. No caso da dinâmica da linha isolada, as condições de contorno podem ser dadas em termos de deslocamentos e velocidades prescritas. Dados gerais como tempo total de simulação, incremento de tempo (time-step) utilizado para integração no tempo, coeficientes de amortecimento relacionados ao problema, entre outros. 131
150 Geração da Malha A qualidade dos resultados de uma análise dinâmica via Método dos Elementos Finitos (MEF), depende diretamente da malha inicial utilizada, sobretudo na fase transiente da análise dinâmica. Uma alternativa viável, capaz de minimizar as oscilações numéricas, consiste em considerar a configuração de equilíbrio estático da linha como sendo a geometria a ser adotada na geração da malha inicial de elementos finitos. O método iterativo para cálculo do equilíbrio estático das linhas, se baseia na equação da Catenária, tal como ilustrado na Figura 11-1 e nas Equações de (11-1) a (11-6). O equilíbrio é calculado dividindo-se a linha em segmentos, onde cada segmento é caracterizado por um tipo de material e, conseqüentemente, um conjunto de propriedades tais como: rigidez axial (EA), peso submerso (w) e comprimento (L). Tv j β Th j Tv i w, EA, L Th i Figura 11-1: Modelo Esquemático de Catenária Utilizado para Geração da Malha 132
151 O equilíbrio estático de um determinado segmento de linha está indicado nas seguintes equações da catenária típica: i 2 i T = Th + Tv 2 i (11-1) Tv = Tv w L (11-2) j i * Th j = Th i (11-3) j 2 j T = Th + Tv 2 j (11-4) H = Th log[( T + Tv ) /( T + Tv )]/ w + Th ( Tv Tv ) /( w / EA) (11-5) j i i j j j i + j V 2 2 = ( T T ) / w + ( Tv Tv ) /(2wEA) (11-6) i j i j Onde: T é a tensão total, T h é a tensão horizontal, T v é a tensão vertical, H é a projeção horizontal do segmento em equilíbrio e V é a projeção vertical do segmento em equilíbrio. Os índices i e j indicam início e final do segmento respectivamente Análise Numérica Nesta seção será apresentada inicialmente a formulação básica apresentando as equações que regem o problema físico a ser resolvido com a utilização do sistema. Para integração destas equações é necessária a utilização de um algoritmo de integração no tempo. Será apresentado nesta seção um breve resumo sobre alguns algoritmos de integração. A parte final desta seção apresenta uma metodologia para consideração das condições de contorno associadas ao problema específico e para a consideração das forças de corrente. As forças de vento sobre o mangote serão desprezadas por não terem grande influência sobre os resultados. 133
152 Formulação Básica Os problemas não-lineares de dinâmica estrutural são governados pela seguinte equação [17]: M U.. ( t) + F ( U( t), U( t)) = F Int. Ext ( t) (11-7) Onde F Int (U(t), Ů(t)) é o vetor dos esforços internos nodais correspondente ao estado de tensões na configuração corrente (instante t) e F Ext (t) refere-se ao carregamento externo aplicado aos pontos nodais na mesma configuração relativa ao instante t. Os vetores F Int (t) e F Ext (t) incorporam as não-linearidades envolvidas no problema. No vetor F Int (t) estão as não-linearidades geométricas e/ou física, uma vez que este vetor é uma função não-linear do vetor de deslocamentos, U(t). As forças externas são atualizadas com a variação da geometria. A equação geral de movimento da dinâmica estrutural representa um Problema de Valor Inicial onde se deseja determinar o histórico de respostas do sistema estrutural ao longo do tempo ( U = U(t), com t Є [0, τ], τ >0), satisfazendo à Equação (11-7) e às seguintes condições iniciais: U (0) = U o e.. ( 0) o (11-8) U = U Onde U o e Ů o são os valores iniciais para os deslocamentos e velocidades, respectivamente. Caso as acelerações iniciais Ü o não sejam conhecidas, pode-se determiná-las a partir da relação [40]:.. U o = M 1 [ F Ext (0) CU. o KU o ] (11-9) 134
153 Algoritmos de Integração Os algoritmos de integração direta são subdivididos em algoritmos implícitos e algoritmos explícitos. Tradicionalmente, os algoritmos de integração implícitos são mais indicados para problemas inerciais, que são problemas cuja resposta é dominada por modos de vibração de baixa freqüência e os algoritmos explícitos são mais adequados para problemas de propagação de onda, onde a resposta é dominada por modos de alta freqüência. Neste trabalho, optou-se por descrever um método explícito similar ao utilizado no ORCAFLEX [35], em função do tipo de problema a ser resolvido. As operações de instalação de linhas estão sujeitas a situações especiais nas quais os métodos explícitos são mais indicados. Entre estas situações especiais está a imposição de uma variação brusca nas condições de contorno do problema, como por exemplo, a liberação do conector do mangote [40]. Entre os algoritmos explícitos estudados estão: o clássico Método das Diferenças Centrais, o algoritmo proposto por Chung e Lee em 1995 [9] e o algoritmo proposto por Hulbert e Chung em 1996 [8], denominado Método Explícito Generalizado-α. O Método das Diferenças Centrais é o método explícito mais conhecido e bastante utilizado em diversas aplicações. Este método, no entanto não possui dissipação numérica. Um algoritmo com dissipação numérica é capaz de amortecer modos de alta freqüência sem afetar a resposta na baixa freqüência e desta forma minimizar o erro numérico inerente ao processo de integração. O Método Explícito Generalizado-α tem este nome em função de ter sido desenvolvido com base no Método Implícito Generalizado-α, proposto pelos mesmos autores, e que para determinados valores dos parâmetros α f e α m reduz-se a algoritmos clássicos como Newmark e HHT-α [28]. 135
154 No quadro da Figura 11-2 é apresentado o Método Explícito Generalizado-α escrito em função dos parâmetros αf e αm. O artigo de Hulbert e Chung [8] apresenta um estudo detalhado baseado na estabilidade do algoritmo, sugerindo valores ótimos para esses parâmetros. 1 - Predição para os valores dos deslocamentos e das velocidade no tempo t n+ 1: dp n+ 1 = d n + Δt n+ 1 v n + Δt n+ 1( β ) vp n+ 1 = v n + Δt n+ 1 (1 λ) a n 2 Estima valores para os deslocamentos e velocidades em d n+ 1 α = ( 1 α f f ) dp n+ 1 + α f d n v n+ 1 α = ( 1 α f f ) vp n+ 1 + α f v n a n t n+1 α : f 2 Aplica equação de balanço para determinar a n+1 α m : Ma n+ 1 α m + Cv n+ 1 α f + Kd n+ 1 α f = F( t n+ 1 α f ) 3 A partir da aceleração a determina aceleração n+ 1 n+1 α m a a n+ 1 α α m man a n+ 1 = (1 α m ) 4 Obtida a aceleração a n+ 1, faz-se a correção para os valores previstos para as velocidades e deslocamentos em t n+ 1 2 d n+ 1 = dp n+ 1 + β Δ a tn+ 1 n+ 1 v n+ 1 = vp n+ 1 + γ Δ a tn+ 1 n+ 1 Figura 11-2: Algoritmo Explícito - Dissipação Numérica Ótima (Hulbert e Chung) 136
155 Modelagem Física A modelagem física do problema resume-se basicamente na determinação dos termos M, F Int (U(t), Ů(t)) e F Ext (t) da Equação (11-7), que são respectivamente a matriz de massa, os esforços internos e os esforços externos. A Figura 11-2 (a) ilustra o modelo de discretização adotado e todos os esforços que atuam sobre o mesmo. A formulação adotada na consideração de cada um dos esforços mostrados na Figura 11-2 (b) será apresentada resumidamente nesta seção Modelo de Massa Concentrada (Lumped mass) Quando se utiliza Elementos Finitos para discretizar o modelo, funções de interpolação geram o campo de deslocamentos sobre um determinado elemento a partir dos deslocamentos nodais calculados. Em geral, essas funções de interpolação são utilizadas também para a determinação do vetor de carregamento e das matrizes de rigidez e da matriz de massa do modelo. Quando este procedimento é adotado, o vetor de carregamento e a matriz de massa são ditas consistentes. Um outro modelo bastante simples e que vem sendo utilizado há muitos anos é o modelo de massa concentrada, conhecido na literatura técnica como Lumped Mass Model [35], [40]. Neste modelo toda a massa dos elementos é transferida diretamente para os nós. Z Y i E X i u 3 (a) C L 0 E u 2 u 1 j j C L u 6 u 5 u 4 F i restauração F i S i esf. interno cisalh. F i inercial F i atrito i F i corrente F i peso F j restauração F j cisalh. F j atrito S j esf. interno (b) j F j inercial F j corrente F j peso Figura 11-3: Elemento Finito Adotado e Esforços Considerados 137
156 Quando se utiliza o modelo de massa concentrada a matriz de massa obtida é diagonal. A diagonalização da matriz de massa na utilização deste modelo traz uma vantagem evidente que é a redução considerável do número de operações para obtenção da solução das equações de equilíbrio. Para utilização de um algoritmo explícito é fundamental que este modelo seja utilizado para que o custo computacional por instante de tempo seja reduzido, uma vez que o incremento de tempo utilizado é muito pequeno Modelo de Empuxo Concentrado A partir das massas concentradas nos nós é calculada a força peso. Uma vez que as linhas estejam dentro d'água elas estarão sujeitas à força de empuxo que age sobre todo o comprimento da barra utilizada para representar uma seção da linha. Neste contexto, este empuxo será calculado numericamente a partir da concentração desta flutuabilidade em n pontos distintos igualmente distribuídos ao longo dos seus comprimentos. A soma total dos empuxos concentrados em cada nó fornecerá o empuxo total da barra. Para simular a situação de linha flutuando será associada a cada nó uma variação do empuxo que depende da posição deste nó com relação à superfície do mar. Assim se o nó estiver totalmente submerso ele terá uma força de empuxo correspondente ao empuxo total, se ele estiver totalmente emerso seu empuxo será nulo e, finalmente, quando ele estiver a menos de um diâmetro da superfície sua força de empuxo variará linearmente com a distância z deste ponto à superfície. 138
157 F i restauração F i cisalh. F i F i inercial F i peso i F i corrente F F j F j restauração j j F F F j Parcela de empuxo concentrado Parcela de massa concentrada j Figura 11-4: Consideração do Empuxo e da Massa do Elemento. A força de empuxo na barra, calculada a partir do empuxo dos sub-nós submersos, é aplicada nos nós extremos da barra de forma consistente. Quando o número de divisões, n, for igual a 2, então teremos o empuxo calculado apenas sobre a massa concentrada nos nós. Neste caso, quanto maior for a discretização da linha, mais bem representada estará a sua flutuabilidade e seu peso distribuídos Esforço Interno Resistente O vetor de esforços internos é composto por duas parcelas. A primeira inclui os efeitos das forças elásticas e a segunda parcela inclui os efeitos das forças de amortecimento, como mostra a Equação (11-10):. F ( U( t), U( t)) = F ( U( t)) + F ( U( t)) (11-10) Int Int. Elásticas Int. Amortecimento. Desta forma, o passo inicial para determinação dos esforços internos não-lineares considerados é o cálculo das forças elásticas [40]. A formulação adotada para o cálculo dessas forças parte da relação linear tensão-deformação dada pela equação: k k k σ = E ε (11-11) Onde σ k é o vetor de tensões, E k é o módulo de elasticidade do material e ε k é o vetor de deformações no k-ésimo elemento. 139
158 As tensões (σ k ) e as deformações (ε k ) no elemento são calculadas considerando-se um regime de grandes deslocamentos e pequenas deformações. Sendo assim, as deformações de cada elemento podem ser obtidas a partir de sua elongação com uso da relação: k k L L k o ε = ( )e k L o (11-12) Onde L k o é o comprimento inicial e L k é o comprimento deformado do elemento no instante t, e e é o vetor unitário nas direções X, Y e Z. A força F k Int.elásticas no k-ésimo elemento pode ser obtida através da equação: k k k F Int. elásticas = σ A (11-13) onde A k é a área da seção transversal do k-ésimo elemento. Substituindo-se as Equações (11-12) em (11-11) e em seguida na Equação (11-13) obtêm-se: F k Int. eláticas = E k A k k k ( L Lo ) e L k o (11-14) Onde o comprimento final L k, correspondente à configuração deformada em um determinado instante, que é obtido considerando-se os valores dos deslocamentos nodais (u 1, u 2, u 3, u 4, u 5 e u 6 ), ou seja: L k = [( x + u u j ) ( xi + u1)] + [( y j + u5 ) ( yi + u2 )] + [( z j + u6 ) ( zi + 3)] (11-15) Calculadas os esforços internos elásticos para cada elemento através da Equação (11-14), o passo seguinte é o cálculo da parcela correspondente aos esforços internos de amortecimento. Esta parcela pode ser obtida através da relação: k k F Int. amortecimento = Cv (11-16) Onde C é a matriz de amortecimento de Rayleigh e v é o vetor velocidade. De posse das Equações (11-14) e (11-16) tem-se definido o vetor de esforços internos por elemento, através da soma das duas equações, dada por: 140
159 ( L L ) k k k k k o F Int. = E A e + k Lo Cv k (11-17) Forças hidrodinâmicas Estas forças são provenientes da interação fluido-estrutura e são resultantes das ações de onda, corrente, empuxo e do movimento relativo [43],[44]. Um corpo flutuante é modelado através de elementos cilíndricos, se puder ser considerado esbelto, empregando, neste caso, a formulação de Morison [27] para o cálculo das forças devidas às ondas e corrente. A fórmula clássica é aplicada quando o cilindro está totalmente submerso, ou parcialmente submerso, desde que atravesse a superfície do mar de forma quase vertical. Elementos esbeltos flutuantes serão tratados posteriormente e seu comportamento no mar será mais bem detalhado. Para elementos cilíndricos, cuja relação entre o diâmetro, D, e o comprimento de onda, λ, é grande, ou seja, D/ λ > 1/5, os membros são ditos não esbeltos. O campo de velocidades e acelerações, gerado pela ação das ondas, é determinado considerando-se um escoamento potencial. O cálculo das forças sobre os elementos esbeltos é feito através da formulação de Morison para tal campo. A análise é baseada na integração no tempo da equação de movimento de corpo rígido. As forças atuantes são ondas, corrente, vento, forças inerciais e de restauração hidrostática. Estas forças ao longo do elemento são transformadas em forças nodais consistentes sobre as massas concentradas. Os efeitos não-lineares incluem a força de arrasto (que é uma função quadrática de velocidade relativa entre o fluido e o corpo), movimentos das embarcações que suportam a linha de mangotes (que conduzem a não-linearidades geométricas) e altura finita de onda. 141
160 São empregados dois sistemas de referência apenas, um local e outro inercial global. O local tem eixo Ox coincidente com o eixo longitudinal do elemento e o eixo Oz tem projeção vertical na mesma direção do eixo vertical global. O elemento adotado, por ser axi-simétrico e completamente definido em termos apenas de suas coordenadas nodais, pode ter sua equação de movimentos descrita diretamente nos eixos globais. As forças calculadas nos eixos locais são rodadas para o eixo global. As forças hidrodinâmicas atuantes nas linhas são induzidas por onda e corrente aos membros estruturais. Primeiro calcula-se as velocidades e acelerações das partículas fluidas, depois essas grandezas são transformadas em forças atuantes sobre os membros da estrutura. Para se calcular as forças atuantes nos elementos, assume-se que um membro é subdividido de modo que o espaçamento médio entre dois membros é grande quando comparado com as dimensões transversais da seção. Assim, pode-se afirmar que: As forças atuantes em um membro podem ser calculadas através de métodos aproximados, como a formulação de Morison, cujos parâmetros importantes como pressão, velocidade e aceleração podem ser calculadas na linha de centro da seção transversais. A força que o fluido exerce em cada membro não é afetada pela presença de outros membros, sendo assim, a resultante das forças pode ser obtida somando-se as forças calculadas para cada membro individualmente. A formulação de Morison é bastante difundida para o cálculo das forças fluidas em membros esbeltos, onde os efeitos viscosos preponderam sobre os inerciais. Em geral, para modelagem destas forças hidrodinâmicas sobre as linhas, é utilizada a formulação de Morison generalizada [27], que é fortemente baseada em trabalhos empíricos. Esta formulação é utilizada em grande parte dos trabalhos publicados na área. 142
161 f mn = 1/ 2C dn D D wdu & 2 2 rn U& π rn w CM U&& π ρ + ρ wn ρw ( C ) M 1 U& pn (11-18) 4 4 f mt = 1/ 2C dt D D wdu & 2 2 rt U& π rt w CM U&& π ρ + ρ wt ρw ( C ) M 1 U& pt (11-19) 4 4 f = f + f (11-20) m mn mt Onde C dn e C dt são os coeficientes de arrasto normal e tangente ao elemento, respectivamente, C M = 1 + C AD é o coeficiente de inércia, C AD é o coeficiente de massa adicional, ρ w é densidade do fluido, D é o diâmetro hidrodinâmico da estrutura, Ů rn (Ů rn ) é a velocidade relativa entre o fluido e a estrutura na direção normal (tangencial) ao membro estrutural, Ü wn (Ü wt ) é a aceleração do fluido projetada na direção normal (tangencial) ao membro estrutural e Ü pn (Ü pt ) é a aceleração da estrutura na direção normal (tangencial). O termo de massa adicionada (C AD ) é passado para o lado esquerdo da equação de equilíbrio dinâmico, e somado ao de massa estrutural, podendo ser chamado de massa adicionada externa, uma vez que pode existir mais uma parcela correspondente à massa contida no interior dos elementos [44]. Este termo de massa interna existirá sempre que se declarar o membro como tubo aberto ou quando a linha estiver com fluido interno. São calculados valores de forças apenas nas extremidades dos elementos, considerando-se uma variação linear ao longo do comprimento. Para elementos próximos à superfície livre, parcialmente molhados, uma das forças é avaliada no ponto de interseção onda-elemento. Em elementos de treliça, depois de avaliada a carga linear ao longo do membro, são calculadas as forças nodais equivalentes, que passam a compor o vetor de cargas externas. Em análise de linhas o valor do amortecimento devido ao fluido é muito superior ao considerado para o amortecimento estrutural. Em alguns casos o amortecimento do 143
162 fluido pode chegar a 10% do crítico. O termo responsável por este amortecimento é proporcional ao quadrado da velocidade relativa, sendo, portanto um termo muito importante. Os coeficientes de arraste e inércia são parâmetros obtidos empiricamente e embora sejam dependentes dos números de Reynolds e de Keulegan-Carpenter, Anexo 2, são, nesta análise, especificados como constantes Consideração de Momentos Fletores Nodais No trabalho de Ghadimi [17] foi apresentada uma formulação bastante simples, que considera uma aproximação a ser feita de forma a permitir a consideração de momentos fletores, transformados em forças cisalhantes, em elementos de treliça. m e k j M j j L j e M j j e Figura 11-5: Curvaturas e Momentos Fletores. Tomando como referência a Figura 11-5, o momento fletor no nó m, adjacente aos elementos j e k obtido a partir da teoria de vigas é: M = ( EI) m R m b m (11-21) onde EI é a rigidez à flexão, R m é a curvatura estimada a partir do ângulo entre os elementos adjacentes, j e k, definida a partir da relação: R m = 2 e k e j (11-22) L k + L j 144
163 O vetor unitário binormal b m é dado por: b m = e kj n (11-23) Onde e kj é o vetor unitário tangente no nó m aproximado pela relação: e kj Lke = L j k + L e + L e o vetor normal unitário é dado por: n = e e k k e e j j j j k Substituindo as Equações (11-22), (11-23), (11-24) em (11-21) obtém-se: M m ( EI) R = ( L + L j m k ) (11-24) (11-25) (11-26) Definido o momento fletor, o esforço cisalhante no elemento j pode ser obtido a partir da variação do momento fletor ao longo do elemento, a partir da equação: Q m e = j ( M 2 M 1) j L j j (11-27) 145
164 Cargas Ambientais A modelagem física do problema resume-se basicamente a aplicação do campo de velocidades do fluído imposto pelas ondas e corrente sobre o elemento e considera-se também a velocidade absoluta do elemento de forma a se obter a velocidade relativa entre a estrutura e a partícula fluida, fazendo aparecer o efeito de amortecimento viscoso Corrente A corrente é definida através de um perfil poligonal, em que são fornecidos valores de velocidade e ângulos de incidência. No caso específico, faz sentido, pois em algumas situações o mangote híbrido atinge profundidades significativas. Este tipo de carregamento geralmente é aplicado incrementalmente à estrutura e fornecido através de uma função tempo, que pode ser associado ao carregamento de onda e corrente. Em análise dinâmica, a corrente normalmente permanece constante. Após a soma vetorial das velocidades de corrente com as velocidades de onda, projetase esta na direção normal ao elemento e depois se aplica a formulação de Morison [27], considerando também a velocidade do corpo, ou seja, utiliza-se a velocidade relativa entre o fluido e a estrutura. 146
165 Onda As velocidades do fluido referidas na fórmula de Morison são calculadas somando-se as contribuições devidas às ondas e a corrente. As ondas são representadas pela superposição linear de ondas senoidais, fruto da representação do mar irregular, ou mar real, como uma soma suficientemente longa de componentes harmônicas, cada uma com freqüência e amplitude definidas a partir do espectro de energia do mar e com fase gerada aleatoriamente. As velocidades, acelerações e pressões em um determinado ponto são obtidas somando-se as propriedades calculadas para cada componente de onda [37]. A teoria linear de Airy para o cálculo das velocidades e acelerações das partículas fluidas devidas à onda é a que tem sido empregada mais freqüentemente em aplicações práticas. Esta teoria é baseada na hipótese de que a elevação da crista da onda é pequena se comparada ao comprimento da onda ou à profundidade. As condições de contorno são satisfeitas apenas até o nível de águas tranqüilas. Para aplicações em que a altura da onda é significativa, o efeito de alteração da posição da superfície livre sobre a força total induzida pela onda se torna muito importante. Adota-se então algum tipo de aproximação a partir da teoria original. Entre os tipos de aproximações existentes, destaca-se a extrapolação hiperbólica, a linear e os métodos de Wheeler [52]. A seguir serão apresentadas algumas definições básicas e os principais conceitos de ondas aleatórias em mares irregulares [43]. 147
166 Modelação Estatística de um Estado de Mar A elevação da superfície do mar num determinado ponto, em relação a um nível médio de referência, é considerada um processo estocástico, e será simbolizado por Z(t). De uma realização z(t) podemos definir alguns parâmetros característicos como [44]: Zero Ascendente (Descendente) Diz-se que z(t) tem um zero ascendente (descendente) em t, se z(t0) = 0 e zt &() > 0 (< 0). Crista (Cava) Posição de z(t) em que (ascendente). zt &() tem um zero descendente Máximos (Mínimos) A ordenada de z(t), em relação ao nível médio, quando z(t) é uma crista (cava). Altura de onda cava-crista diferença entre o máximo e o mínimo precedente Hcc. Altura de onda de zero ascendente Máxima diferença de valores de z(t) entre dois zeros ascendentes consecutivos Hz. Período de crista é o intervalo de tempo entre duas cristas sucessivas. Período de zero-ascendente é o intervalo de tempo entre dois zeros ascendentes consecutivos. 148
167 Elevação da superfície do mar A elevação da superfície do mar será modelada probabilisticamente por um processo estocástico ergódigo, e desta maneira pode ser representada pela expressão: N N (11-28) zt () = z() t = z cos( ω t ψ ) n 0n n n n= 1 n= 1 Onde as freqüências ω n assumem valores no intervalo (0, ); as fases ψ n são variáveis aleatórias independentes, com distribuição uniforme no intervalo [0, 2π]; e z 0n são as amplitudes dos harmônicos z n (t) que constituem o sinal. Assim z(t) é a soma de diversas variáveis aleatórias independentes z(t) = z 1 + z z n +..., onde z n = z 0n cos(ω n.t ψ n ) (11-29) Pelo teorema Limite Central, pode-se concluir que se n tende para o infinito, z(t) é uma variável aleatória com distribuição normal com valor esperado µz e variância 2 σ z μ = Ezt [ ( )] = 0 z σ = Ez [ ( t)] 2 2 z (11-30) 149
168 Simulação da Elevação do Mar a partir de um Espectro Para fins de simulação da elevação do mar por um número discreto de componentes de onda conforme temos que determinar as amplitudes das componentes z 0n do sinal. 1 T N N R (0) = lim ( z cos( ωt ψ ))( z cos( ω t ψ )) dt = zz 0 0i i i 0 j j j T T i= 1 i= 1 1 [ z cos( ω t ψ )] [ z ( t)] z S ( ω) dω N N N < 0i i i >= < i >= < 0i >= zz 0 i= 1 i= 1 i= 1 2 (11-31) Considerando-se agora uma única freqüência ω = ω k e em torno dela um elemento de freqüência δω, chega-se finalmente à expressão que fornece as amplitudes de cada componente de onda por freqüência. 1 z = S ( ω ) δω k zz k (11-32) Assim z(t) é a soma de diversas variáveis aleatórias independentes z(t) = z 1 (t) + z 2 (t) z i (t) +..., onde z k (t) = z 0k cos(ω k t - ψ k ), com z = 2 0k S zz k (ω ) δω (11-33) 150
169 Determinação de Condição Extrema para Projeto Para se descrever estatisticamente o que ocorre em uma determinada região do mar, devem-se fazer observações ao longo dos anos e reuni-las adequadamente. Estas observações podem ser feitas através de registros com seu posterior tratamento estatístico e, na impossibilidade de assim proceder, através de observações visuais. Fazem-se registros periódicos das elevações durante 20 minutos a meia hora com intervalo de cerca de seis horas, de forma tal que durante o registro o processo possa ser considerado ergódigo com um número de pontos que permita uma análise estatística e espectral consistente e possam capturar as variações do mar ao longo dos dias. A partir de cada um desses registros podemos determinar o seu espectro, a variância do processo, o período médio e outras grandezas. Para se acumular coerentemente todas estas informações, de tal forma que seja possível sua utilização prática, é conveniente extrairmos a partir dos espectros dos registros os valores de altura significativa e do período médio, Hs e Tm. Em que a altura significativa é igual a H 1/3, definida como a média do terço das maiores alturas. H1/3 = [ hp( h) dh]/(1/3) h1/3 (11-34) onde H 1/3 é definido como o valor de h cuja probabilidade de ser excedido é igual a 1/3: 1 Ph [ > h1/3] = phdh ( ) = (11-35) h /3 3 Para o período médio, pode-se utilizar a média dos períodos de zeros ascendentes, mas muitas vezes outros valores são escolhidos como característicos do sinal. Deve-se ressaltar que de posse destes valores pode-se, em geral, recuperar com boa aproximação a curva do espectro utilizando-se formulações empíricas sobre a função de densidade espectral. Estas formulações são fruto de vários estudos em que se busca uma 151
170 expressão que tenha como parâmetros H 1/3 e T m e em função da freqüência descreva a função de densidade espectral. H1/3 = 4.0 m0 = 4.0σ (11-36) Então, para cada registro podemos obter, após a determinação da função de densidade espectral, os valores de H 1/3 e T m, altura significativa e período médio. Com a altura significativa obtemos a variância e, por conseguinte as distribuições de Gauss para as elevações e de Rayleigh para as alturas e picos. Assim, dentro de um estado de mar podemos estudar a partir de seu registro os valores extremos por exemplo. Isto caracteriza um estudo de curto prazo. 152
![11.1.5 Geração dos Movimentos Impostos pelas Embarcações As forças hidrodinâmicas de primeira e segunda ordem são obtidas no programa WAMIT [44] para tratamento do fluxo potencial e o seu](/docs-images/79/79575829/images/171-0.jpg "comportamento ao avanço ou correnteza por modelos de manobra [39] por forças de arrasto através de modelos quadráticos [19,25].")

171 Geração dos Movimentos Impostos pelas Embarcações As forças hidrodinâmicas de primeira e segunda ordem são obtidas no programa WAMIT [44] para tratamento do fluxo potencial e o seu comportamento ao avanço ou correnteza por modelos de manobra [39] por forças de arrasto através de modelos quadráticos [19,25]. O vento sobre o navio é dado através dos seus coeficientes de arrasto de vento para cada direção de incidência. A restituição hidrostática é normalmente representada por coeficientes lineares em torno da posição de equilíbrio de peso e empuxo. Ensaios em tanques de provas são utilizados para aferição dos modelos matemáticos e para verificar o comportamento global do sistema com todas suas interações. Os movimentos do navio são primordialmente afetados por ondas longas, muito maiores que o diâmetro hidrodinâmico dos mangotes. Estes portanto podem ser representados na onda unicamente pelas forças de Froude-Krilov [43]. Na formulação de Morison [27], a parcela de força de inércia corresponde às forças de Froude-Krilov. Figura 11-6: Ensaio com Modelo Reduzido Navios em Tandem Os movimentos dos apoios das linhas são considerados, numa primeira instância, através das funções de transferência dos movimentos de cada navio, transladada para o ponto em questão. Estas funções são conhecidas como RAO (Response Amplitude Operator) e, para serem geradas, supõem uma linearização do sistema. Elas podem ser entendidas como a resposta complexa (amplitude e fase) do navio a uma excitação harmônica de altura unitária 153
172 12 ANEXO FORÇAS HIDRODINÂMICAS Neste anexo, traçam-se considerações físicas sobre o cálculo de forças hidrodinâmicas em corpos esbeltos submersos e flutuantes. A principal idéia é desenvolver as conjecturas teóricas para se fazer uma aproximação para calcular as forças sobre o elemento, consistindo de forças de inércia e forças de arrasto. As forças de inércia são causadas pela da aceleração do campo e as de arrasto são devidas ao campo de velocidades. Como o mangote, flutuante ou não, tem dimensão transversal muito reduzida em comparação com o comprimento das ondas do mar, sua presença não perturba globalmente o campo de velocidades e acelerações, bem como, o perfil da onda incidente. Ainda devido às dimensões reduzidas do corpo, apenas a onda incidente, sem espalhamento devido ao corpo, precisa ser considerada no cálculo das forças de onda. As forças de arrasto são de natureza dissipativa, assim, quando o fluido se mexe, ele arrasta o corpo na direção do fluxo, porém quando o corpo se mexe a força fluida se opõe ao movimento do corpo. Elas são causadas pelo efeito da viscosidade do fluído que pode alterar significativamente o campo de pressões ao redor do mesmo. Portanto, por esta explicação inicial, pode-se chegar a equações simplificadas, porém precisas, para se avaliar a interação entre a estrutura e o mar. Não serão desenvolvidas, neste capítulo, as equações finais de teorias lineares, ou não lineares, de onda. Ao invés disto, recomenda-se, ao longo do texto, a leitura das referências especializadas para este fim, evitando-se a transcrição de um equacionamento clássico e amplamente divulgado. No entanto, aspectos teóricos e interpretações físicas serão desenvolvidos e amplamente discutidos. 154
173 As forças de arrasto e inerciais são pouco dependentes dos coeficientes C D e C M, quando o movimento relativo entre a estrutura e o fluido for desprezível, prevalecendo os efeitos de Froude-Krylov. Uma avaliação importante é perceber que há uma grande consistência entre as fases da elevação das ondas e as cargas sobre as linhas, indicando a preponderância destes efeitos. O crescimento marinho, ou cracas, sobre elementos esbeltos também exerce influência sobre os carregamentos e também sobre a massa e o diâmetro hidrodinâmico. Nas avaliações numéricas é recomendável que a massa, diâmetro para flutuação e diâmetro hidrodinâmico sejam estabelecidos de acordo com o material agregado pelo crescimento de cracas, sem esquecer o aumento da rugosidade relativa. Outros efeitos relevantes nas cargas sobre as linhas flutuantes são causados pelas sombras viscosas e inerciais das embarcações, cuja presença altera significativamente o campo de velocidades e acelerações e mesmo as elevações do mar. Porém, diante das dificuldades de avaliação tais efeitos não são normalmente considerados no cálculo das forças sobre linhas de transferência. No entanto, sabe-se que os efeitos de arrasto devidos à correnteza e movimentos causados pelo excesso de empuxo nas extremidades das linhas são determinantes. 155
174 Cálculo dos Esforços nas Linhas O cálculo de forças é um grande desafio, pois se tratam de estruturas altamente complacentes, sujeitas a baixas tensões efetivas. Modelos especiais de forças devem ser considerados para descrever os efeitos de arrasto e de massa adicional, quando a linha estiver sujeita à correnteza, a ondas e aos movimentos impostos pelas embarcações. As áreas críticas são aquelas sujeitas a momentos e curvaturas excessivas, junto às embarcações, bem como os esforços nos conectores provocados pelo movimento vertical da linha impulsionado pelos movimentos relativos. Independente da natureza da linha, flutuante ou submersa, o seu comportamento físico e os parâmetros que governam as interações com o fluído são muito semelhantes. A tensão efetiva nas linhas é governada pela geometria e pela rigidez transversal da mesma. Linhas esbeltas como cabos e amarras não são influenciadas pela rigidez a flexão. No caso de risers e linhas de transferência, no entanto, a rigidez a flexão deve ser cuidadosamente tratada. As não linearidades são decisivas para análise estatística da resposta das estruturas quando expostas a carregamentos irregulares, advindos das ondas ou do movimento das embarcações. As principais não linearidades a serem consideradas são: 1. Rigidez geométrica, isto é, a contribuição da tensão efetiva na rigidez transversal. Desta forma, a variação de tensão apresenta efeitos não lineares em estruturas esbeltas. 2. Não linearidades do carregamento hidrodinâmico. Por exemplo, as forças de arrasto são dependentes da velocidade relativa ao quadrado e, além disso, tem as não linearidades impostas pela elevação da superfície do mar. 156
175 3. Grandes rotações no espaço. Este efeito é relevante, pois o comportamento da linha varia com os deslocamentos impostos, sendo mais crítico quando a linha apresenta rigidez à flexão diferente para cada direção. 4. Não linearidades associadas ao material e ao conjunto composto. Especialmente importantes para risers flexíveis e umbilicais que podem apresentar comportamento não linear por causa dos componentes sintéticos, incluindo efeito de histerese axial. Outra fonte de não linearidades pode ser representada pelas juntas flexíveis, bending stiffners e tensionadores. 5. Problemas de contato e interferência. 157
176 Ondas de Gravidade Chama-se onda de gravidade, o movimento oscilatório de um fluido devido a efeitos gravitacionais ocasionados pela presença de superfície livre. Qualquer perturbação, que ocasione uma variação da pressão do fluido próximo à superfície livre, acarretará um movimento da massa fluida em busca do equilíbrio com a pressão atmosférica e com isto mudança de forma desta superfície. Figura 12-1: Perfil de uma Onda Regular Progressiva No estudo de ondas de gravidade, assumem-se as hipóteses de que o fluido é incompressível e ideal, que o escoamento é irrotacional e que as forças de corpo derivam de um potencial gravitacional. Com as hipóteses de fluido incompressível e escoamento irrotacional, podemos dizer que o campo de velocidades é dado pelo gradiente de uma função potencial de velocidades, que satisfaz a equação de Laplace em todo o domínio fluido. A superfície livre é descrita pelo movimento das partículas fluidas no contorno em contato com a atmosfera, sendo então desconhecida. Seu movimento é uma das incógnitas a serem determinadas. Assumimos que é formada sempre pelo mesmo grupo de partículas fluidas. Se definirmos a função que descreve a superfície livre então sua derivada substantiva deverá ser sempre nula. 158
177 Assumindo-se que as ondas progressivas viajam na direção positiva do eixo x com certa velocidade, suas características permanecem idênticas para um observador que viaja na mesma velocidade e no mesmo sentido que a onda. Por outro lado, a superfície livre da onda oscila verticalmente entre pontos fixos sem progressão. A não linearidade ou a ordem do problema é definida em termos da declividade da onda ε. A teoria de 1 a ordem é proporcional à declividade da onda, a teoria de 2 a ordem ao quadrado da declividade, e assim por diante. Dentre os métodos que se encaixam nesta categoria, podem ser mencionados os seguintes: Teoria Linear de Airy, ou Teoria de Onda Senoidal: de primeira ordem, válida para ondas de pequena amplitude (quando comparadas ao seu comprimento L); Teoria de Stokes, não-lineares (de segunda, terceira ou quinta ordem), na qual a de primeira ordem corresponde à onda linear de Airy. Cabe mencionar que há outras teorias que procuram representar matematicamente a forma da onda, velocidade e aceleração em função da profundidade, ou formulada por função de corrente, etc. Variando de teorias mais simples (Teoria Linear de Airy) até teorias mais complexas onde várias hipóteses simplificadoras são abandonadas, tais como: altura finita de onda, fluido homogêneo e incompressível, tensão superficial desprezível, fluido ideal ou invisto [43] [44] [53]. O procedimento mais usual, que atende à prática de projeto de sistemas offshore, consiste em empregar a Teoria Linear de Airy, portanto, o procedimento de solução da Teoria de Airy será mais bem detalhado. Por outro lado, os mares irregulares serão representados por séries infinitas de ondas harmônicas, valendo, portanto, sobreposição dos seus efeitos. 159
178 Teoria Linear de Airy A Teoria Linear de Airy está baseada na premissa de que a altura de onda é pequena comparada com o comprimento de onda. Esta premissa permite que as condições de contorno de superfície livre sejam satisfeitas no nível médio de águas tranqüilas e não no nível real da elevação da onda. Para tanto, as condições de contorno são linearizadas, desprezando os termos de segunda ordem e de ordens superiores. O procedimento de linearização consiste em obter apenas a solução de primeira ordem, tomando somente o primeiro termo das expansões em séries de Φ e η. Com isso o problema passa a ser linear em termos da altura da onda H ou da declividade ε. Assim, conforme Sphaier [44], chega-se a seguinte expressão para o potencial de velocidade de 1 a ordem (Φ = ε Φ 1 ): ga cosh( k( z + d)) φ( x, z, t) = sen( kx ωt) (12-1) ω cosh( kd) A elevação da superfície da onda que corresponde a um trem de ondas regulares se movendo na direção-x será dada por: η( x, t) = a cos( kx ωt) (12-2) Substituindo o valor de Φ na condição de contorno de superfície livre, obtém-se a Relação de Dispersão Linear, que fornece a relação entre freqüência circular da onda e o número de onda k em lâminas de água com profundidade d: 2 ω = gk tanh( kd) (12-3) Para águas profundas o valor de L = 2π/k tende para gt 2 /2π já que tanh(kd) tende para 1. Já para águas rasas o valor de L = 2π/k tende para T gd. 160
179 Partindo desta discussão, em águas rasas, intermediárias e profundas faz-se a consideração apresentada Tabela Tabela 12.1: Consideração para Águas Rasas, Intermediárias e Profundas Aproximação Águas Rasas Critério d L < 1 20 Águas 1 d 1 < < Intermediárias 20 L 2 Águas Profundas d 1 > L 2 Comprimento de Onda L = T gd 2π L = k 2 gt L = 2π Uma vez obtido o potencial de velocidade, as velocidades das partículas do fluido nas direções horizontal e vertical são obtidas diferenciando-se a função potencial de velocidades em relação a x e z. Observando-se as expressões de velocidade horizontal e vertical, verifica-se que a velocidade horizontal da partícula de fluido é máxima (ou mínima) quando a velocidade vertical for zero e vice-versa. Uma visualização dos principais aspectos concernentes ao perfil da onda regular e seu perfil de velocidades encontra-se descrita de Figura 12-2 a Figura
180 Figura 12-2: Pontos de Velocidade Horizontal Máxima, Mínima e Nula Figura 12-3: Pontos de Velocidade Vertical Máxima, Mínima e Nula Figura 12-4: Perfil de Velocidades da Onda, para o Tempo t=0 162
181 Figura 12-5: Pontos de Aceleração Horizontal Máxima, Mínima e Nula Figura 12-6: Pontos de Aceleração Vertical Máxima, Mínima e Nula Águas Rasas Águas Intermediárias Águas Profundas Figura 12-7: Visualização das Órbitas das Partículas Fluidas 163
182 Finalmente, outro resultado de interesse é o campo de pressões no fluido. Tal resultado pode ser obtido através da aplicação da equação de Bernoulli, na forma: φ 1 ( ρ ρ ρ( φ) t 2 2 p x, z, t) = gz (12-4) A primeira parcela desta expressão corresponde ao termo de ordem zero, ou de pressão hidrostática. As demais parcelas correspondem às parcelas de primeira e segunda ordem da pressão dinâmica. De forma consistente com a expansão de primeira ordem do potencial de velocidade assumida pela teoria linear de Airy, a expressão da pressão até a primeira ordem fica: p l φ = ρ gz ρ (12-5) t Onde a segunda parcela do lado direito representa a pressão dinâmica ou oscilatória e facilmente pode-se mostrar que para z = 0, obtém-se: p dl ( x, t) = 0 = ρgη( x, t) (12-6) z A pressão dinâmica no nível de águas tranqüilas (z = 0) é calculada tomando o valor da elevação da superfície livre da onda. Isto é, a pressão dinâmica na superfície z = 0 é igual pressão hidrostática de uma coluna de água correspondente a elevação da superfície livre da onda. Assim, em uma partícula localizada na superfície média, sob a crista de uma onda, a elevação é igual à amplitude da onda e, portanto, p dl ( x = 0, z = 0, t = 0) = ρga (12-7) Como seria de se esperar, considerando ainda que a pressão hidrostática na superfície média (calculada com z = 0) é igual a zero. 164
183 Deve-se observar que a pressão na superfície livre instantânea não é exatamente nula. Este é um problema que vêm da linearização do problema que acarreta a transferência da posição para se impor a condição de contorno. A rigor esta formulação foi desenvolvida considerando-se que as condições de contorno do problema eram impostas no nível médio do mar (o nível de águas tranqüilas, onde z = 0), e não na superfície livre da onda. Desta forma, todas as expressões apresentadas até agora para fornecer valores para a cinemática da onda (por exemplo, velocidades e acelerações) e pressões podiam ser usadas apenas para pontos até a superfície média (com valores negativos para a coordenada z), ignorando a alteração da superfície livre devida à onda. Em aplicações onde a altura de onda é significativa, o efeito de alteração da superfície livre sobre a força total induzida pela onda torna-se muito importante e, portanto, faz-se necessário algum tipo de aproximação para considerar os pontos situados na superfície livre. Dentre os tipos de aproximações mais conhecidos destacam-se a extrapolação linear, a hiperbólica [5], e o método de extrapolação ou stretching de Wheeler [52]. O princípio da Extrapolação de Wheeler consiste em assumir que, na superfície livre da onda, os valores de velocidades, acelerações, etc, são idênticos aos originalmente calculados pelas expressões de Airy para o nível de águas tranqüilas. Para isto, se afeta o termo (z+d) por d/(η + d), onde η é a elevação da onda no ponto. Por exemplo, a expressão para a velocidade horizontal se torna: d cosh( k( z + d)) φ gka η + d u = = x ω senh( kd) cos( kx ωt) (12-8) Observa-se que a expressão original podia ser usada apenas para valores de z até a superfície média, para pontos no nível de águas tranqüilas onde z =η = 0 o argumento do cosseno hiperbólico seria kd. Na expressão modificada, que pode ser usada para pontos acima da superfície média, em qualquer ponto na superfície livre da onda tem-se z =η e, portanto, o argumento do cosseno hiperbólico continua sendo kd confirmando o pressuposto que os valores na superfície livre para a expressão modificada são os 165
184 mesmos obtidos na superfície média para a expressão original. Os demais valores para pontos abaixo da superfície livre assumem uma distribuição em cossenos hiperbólicos esticada (se o ponto está na crista, ou encolhida se o ponto está no cavado), de modo a permitir a determinação da cinemática da onda até o fundo do mar. Estas considerações sobre a cinemática da partícula em um movimento ondulatório são particularmente importantes no caso do mangote flutuante, pois a altura de onda é significativamente maior que o seu diâmetro externo Forças Geradas na Estrutura Induzidas pelas Ondas Em um item anterior, foi apresentada a formulação que representa o comportamento de ondas no mar. Com isso é possível determinar as características da movimentação do fluido sob a ação de ondas (incluindo campos de velocidades, acelerações e pressões), mas sem considerar a presença de um corpo flutuante ou submerso. Esta é uma das principais tarefas no projeto de sistemas offshore: trata-se de uma tarefa complexa, pois envolve diversas incertezas, que se somam às envolvidas na formulação do modelo de ondas, e na natureza aleatória de um mar real. Atualmente, existem formulações que, tendo sido verificadas e calibradas por ensaios experimentais e monitoração no mar, se mostram adequadas para representar com precisão as forças devidas à movimentação do fluido sobre sistemas offshore. Segundo Chakrabarti [5], estas formulações podem ser agrupadas em três classes principais, de acordo com sua adequação aos diferentes tipos de sistemas offshore: Formulação de Morison Modelo de Difração/Radiação Formulação de Froude-Krylov A seguir apresenta-se uma descrição resumida das principais características de cada uma destas formulações, focalizando na Formulação de Morison e na Formulação simplifcada de Froude-Krylov, por causa da natureza do problema aqui analisado. 166
185 167
186 Modelo de Difração / Radiação Quando as dimensões do sistema da embarcação ou de qualquer sistema offshore não são pequenas em relação ao comprimento de onda, a presença do corpo altera de forma significativa o campo de ondas na sua vizinhança, gerando efeitos de difração, interferência e radiação de ondas pelo corpo. Portanto, nestes casos de corpos de forma completamente geral, um método rigoroso para o cálculo das forças induzidas pela movimentação das partículas do fluido devida às ondas deve considerar um modelo de Difração/Radiação [23] [50]. Por exemplo, o programa WAMIT [49] é um código comercial extensamente usado para calcular as forças de fluido empregando um modelo de Difração/Radiação. Esse modelo matemático considera a presença do corpo e tem por objetivo determinar as cargas que resultam da movimentação do fluido induzida pelas ondas. O modelo de Difração/Radiação pode estar associado à Teoria Potencial, compondo um modelo matemático em termos de um PVC (problema de valor de contorno) composto pela equação de Laplace tridimensional, com as condições de contorno associadas, mas agora incluindo a consideração do corpo submetido à ação do fluido. Em alguns casos particulares, como cilindros verticais fixos e semi-cilindros ou semiesferas apoiadas no fundo, existem soluções analíticas fechadas disponíveis na literatura. Em casos mais gerais podem ser empregados métodos numéricos, como o método da função de Green [44]. Ambos os casos apresentam um grande ganho computacional, o primeiro, por ser bidimensional e o segundo, por não precisar modelar a superfície livre e o contorno do fluido, apenas o corpo flutuante. Vale observar que o modelo de Difração/Radiação, associado à Teoria Potencial, baseada na equação de Laplace, pressupõe a desconsideração da viscosidade do fluido. Um modelo mais rigoroso que levasse em conta este efeito deveria ser baseado nas equações de Navier-Stokes [3] [46], compondo, portanto, um modelo matemático ainda mais complexo. 168
187 Formulação de Morison A formulação de Morison [27] é bastante difundida em aplicações práticas para o cálculo das forças hidrodinâmicas induzidas pelas velocidades e acelerações do fluido em corpos esbeltos, aqueles cuja dimensão transversal característica D é pequena em comparação com o comprimento de onda λ. Um critério usualmente empregado para definir um corpo esbelto consiste em verificar se a seguinte relação é atendida: Error! < 5, onde D é o diâmetro do membro e λ o comprimento da onda Nesses casos onde os efeitos de difração e reflexão são desprezíveis, a formulação de Morison assume que as forças podem ser calculadas através de uma aproximação na qual os parâmetros importantes do fluxo na superfície do corpo, tais como pressão, velocidade e aceleração, podem ser aproximados pelo valor correspondente calculado no eixo da seção transversal do corpo esbelto. A formulação de Morison considera que a força de onda é composta pela soma de duas parcelas: uma parcela de arrasto associada a efeitos viscosos, proporcional ao quadrado da velocidade relativa entre o corpo e do fluido; e uma parcela de inércia, proporcional às acelerações do fluido e do corpo. A equação de Morison pode ser expressa da seguinte forma: πd πd F = ρ u& x& u& x& u&& & x wdcd ( ) + ρw CM ρw CAD (12-9) Nesta expressão, ρ w é a massa específica do fluido; D é uma dimensão transversal característica do corpo (usualmente o diâmetro de um membro cilíndrico); e u;., x;., u;.. e x;.. são respectivamente as velocidades e acelerações do fluido e do corpo. O primeiro termo do lado direito desta equação (proporcional às velocidades) corresponde, portanto 169
188 à parcela de arraste; o segundo e terceiro termos (proporcionais às acelerações) correspondem à parcela de inércia. Geralmente considera-se que a formulação de Morison é mais aplicável quando a força de arraste é significativa, e os efeitos viscosos preponderam sobre os inerciais; este é usualmente o caso em corpos esbeltos [1] [2] [19] [17] [21] [26] [28] [43]. A formulação de Morison é considerada semi-empírica, já que as parcelas de arraste e inércia são afetadas por coeficientes adimensionais C D, C M e C AD, que devem ser calibrados a partir da observação de resultados experimentais. Normalmente, durante as simulações, os coeficientes são tomados como constantes e definidos da seguinte forma: O coeficiente de inércia é igual a 2.0 para tubos cilíndricos circulares em fluxo uniformemente acelerado, no qual os efeitos viscosos são desprezíveis, logo, C AD =1.0. Em outros casos, C M =1+C AD, onde C AD é o coeficiente de massa adicionada a ser determinado. O coeficiente de arrasto C D para um cilindro circular em escoamento retilíneo pode ser estimado como função do número de Reynolds, no caso de tubos Re=V.D/ν com V sendo a velocidade característica do fluxo e ν a viscosidade cinemática do fluido x 10-7 que é a viscosidade dividida pela densidade, conforme apresentado na Tabela Tabela 12.2: Valores Sugeridos de C D Faixa de Reynolds C D sugerido Re 2.0 x 10 5 C D =1.2 Re 5.0 x 10 5 C D = x 10 5 < Re < 5.0 x 10 5 Re C D = log 5 2x10 170
189 O terceiro termo da equação de Morison é afetado pelo coeficiente C AD (usualmente definido como C M 1) e é proporcional às acelerações do corpo, estando associado aos efeitos de massa adicional. Figura 12-8: Efeito do Raio de Curvatura e da Rugosidade no C D de Corpos Bidimensionais 171
190 Na Figura 12-8, para uma faixa muito usual do número de Reynolds, apresentam-se diferentes valores de C D de acordo com a forma da seção e com a rugosidade da mesma [7]. Observa-se que muitas estruturas marítimas apresentam superfícies rugosas pouco tempo após a instalação por causa do aparecimento de cracas. Os coeficientes empíricos C M e C D são escolhidos em função da rugosidade do membro, da forma da sua seção transversal e dos números de Reynolds e também de Keulegan- Carpenter. Numerosas pesquisas têm sido feitas no sentido de se pesquisar o comportamento destes coeficientes sob diversas condições do fluxo. Uma forma de se tratar estas incertezas é considerar estes coeficientes como variáveis aleatórias associando-se a eles funções de probabilidade conhecidas. A equação de Morison tem apresentado bons resultados em aplicações práticas tais como membros de plataformas fixas reticuladas (as jaquetas), e linhas de ancoragem e risers e tubos em geral modelados por elementos finitos. Nestas aplicações, no entanto, deve-se ter em mente os seguintes aspectos: a) A Fórmula de Morison considera que a resposta do elemento está alinhada com a direção do fluxo incidente. Portanto, omite forças de lift (sustentação) e forças de arrasto devidas a vibrações induzidas por vórtices (VIV), que podem ser importantes em muitas situações. b) Não incorpora o efeito da esteira de interferência entre elementos adjacentes, muito próximos (o que pode influenciar a parcela de arrasto). Na verdade, um elemento na esteira de outro pode receber menos carga, o que pode levar à colisão (clashing) entre os elementos adjacentes. Assim, a utilização pura e simples da equação de Morison equivaleria a assumir que os membros, além de relativamente esbeltos, são razoavelmente espaçados entre si, de modo que o espaçamento médio entre dois membros é grande quando comparado com as dimensões transversais da seção. A força que o fluido exerce em cada membro não seria então afetada pela presença de outros membros, e a força total pode ser obtida somando-se as forças calculadas individualmente para cada membro. 172
191 Uma maneira prática de expressar a idéia de corpo esbelto isolado é reconhecer que a presença da estrutura composta por elementos esbeltos não altera significativamente o perfil da onda incidente, ou seja, a estrutura é transparente para a onda, embora sofra seus efeitos. Finalmente, a formulação de Morison oferece a possibilidade de se considerar de forma simples, sob o ponto de vista computacional, o carregamento induzido em membros inclinados em relação à vertical. A técnica utilizada, neste caso, é uma extensão da fórmula de Morison onde se consideram as velocidades e acelerações normais ao cilindro. A depender da natureza do problema, podem-se estipular, também, os coeficientes tangentes de inércia e arrasto para compor a força total no elemento Formulação de Froude-Krylov A formulação de Froude-Krylov parte da hipótese de que a força atuante no corpo é proveniente da pressão gerada pela passagem da onda incidente sobre a superfície do corpo, também considerando que a presença do corpo não afeta o fluxo. A partir da integração, ao longo da superfície molhada, do campo de pressões no fluido, gerado pela onda, são obtidas as componentes da força resultante atuando no corpo. Particularizando para o caso de elementos cilíndricos, aplica-se o Teorema de Gauss para transformar a integral sobre a superfície submersa do corpo em uma integral do gradiente de pressão p sobre o volume imerso: f FK = S pnds = V pdv (12-10) Onde, S é a superfície que envolve o volume imerso do corpo; n é um vetor unitário normal à superfície, e p é um vetor contendo componentes do gradiente de pressão do fluido. 173
192 Para elementos esbeltos de seção constante, a integração no volume V pode ser substituída pela multiplicação da área da seção transversal A pela integral ao longo do comprimento do eixo do membro. Além disso, considerando que as dimensões da seção transversal são pequenas comparadas com o comprimento de onda, os valores do gradiente de pressão na seção transversal podem ser tomados como constantes e iguais aos valores calculados no eixo. Para elementos submersos, como cilindros ou esferas, Chakrabarti [5] demonstra que, em muitos casos, as expressões resultantes são semelhantes às obtidas pela parcela de inércia da fórmula de Morison (embora, como mencionado anteriormente, o coeficiente que deve ser determinado empiricamente não é o mesmo). 174
193 Cálculo dos Esforços sobre a Linha de Mangotes Considera-se inicialmente um corpo cilíndrico de comprimento infinito sob um escoamento uniforme com velocidade constante. Pode-se, assim, analisar o problema de forma bidimensional. Há duas situações a serem consideradas: a) Se o fluido é real, isto é, viscoso, aparece uma força de arrasto por unidade de comprimento que pode ser representada por: 1 F = ρ u& u& DC D (12-11) 2 onde ů é a velocidade do fluxo incidente, D é o diâmetro, ρ é a massa específica e C D é o coeficiente de arrasto que depende naturalmente da forma do corpo e da velocidade do fluxo incidente. b) Se o fluido for ideal, isto é, invíscito ou sem viscosidade, a força de arrasto é nula. Este é o conhecido paradoxo de d Alembert (Jean Le Rond d Alembert, ). Caso o escoamento incidente tenha velocidade variável, ou seja, ů = ů (t), tem-se: a) Para um fluido ideal, ou seja, não viscoso, aparece apenas uma força de arrasto por unidade de comprimento proporcional à aceleração, na forma: 1 F = ρπ 2 D C M u& & (12-12) 4 onde C M = (1 + C AD ) é o coeficiente de inércia e C AD é o coeficiente de massa adicional 175
194 b) Para um fluido real: F = ρπ D u & C M + ρu& u& DC D (12-13) 4 2 onde CM 2.0 Em qualquer caso, vale observar que na equação C M = (1 + C AD ) o 1 é a parcela de força devida ao fato do corpo estar ocupando o espaço que era ocupado por líquido que estava sendo acelerado, portanto, pela Segunda Lei de Newton, F = m.a = ¼.ρ.π.D 2. ü. A segunda parcela, C AD, deve-se à perturbação que o corpo provoca no escoamento do fluido. 176
195 Forças Hidrodinâmicas Devidas às Ondas sobre um Cilindro Esbelto Considera-se que o escoamento incidente é proveniente de uma onda, cuja altura e comprimento são bem maiores do que o diâmetro do corpo. Analogamente, considera-se a parcela correspondente ao volume de fluido equivalente ao corpo, na mesma posição. Assim, tem-se r F pnds = pdv = S V (12-14) Du& r ρ = p ρgk (12-15) Dt Onde a parcela que depende da aceleração da gravidade, g, é estática. Substituindo, tem-se Du& r F = ρ dv + ρgvk (12-16) Dt V Onde a última parcela corresponde ao empuxo sobre o corpo submerso e a primeira parcela é a chamada força de Froude-Krylov. Se o corpo tem um diâmetro muito pequeno comparado com a altura e comprimento da onda, então podemos supor que DŮ/Dt = Ü, aceleração do fluido, é constante ao longo do volume ocupado pelo corpo. Portanto, Du& r F = ρ V + ρgvk (12-17) Dt Se o corpo está totalmente submerso, sendo de pequenas dimensões, aparece uma perturbação local, que não afeta globalmente o perfil da onda incidente. Assim, pode-se considerar 177
196 Du & Du& inc Du& perturbada ρ = ρ + ρ (12-18) Dt Dt Dt p = p + p (12-19) F din din inc perturbada = r pinc ds + p n r ρ n ρ perturbada ds S S (12-20) No caso de corpos de grande deslocamento, a primeira parcela é a parcela de Froude- Krilov e a segunda é a parcela de Difração. No entanto, voltando-se ao caso de corpos esbeltos, chega-se a: F din πd πd πd = ρ u& inc + ρ u&& incca = ρ (1 + CA) u& inc (12-21) No caso do corpo em movimento, pode-se considerar corpo totalmente imerso, mas perto da superfície e o corpo flutuando. No caso do corpo profundamente imerso, sem perturbar, portanto, a superfície livre da água, ao se mover ele perturba o escoamento. Se o fluido for invíscito, a força fluida relativa será: F 2 πd = m && ad x = ρ C & Ax (12-22) 4 onde & x& é a aceleração do corpo. Para um cilindro circular C A = 1. Caso o efeito viscoso seja considerado, então tem que acrescentar a parcela de arrasto, logo: 2 πd F = ρ C A (Re)& x 1/ 2ρC (Re) x& x& D (12-23) 4 178
197 Se o corpo está próximo à superfície livre, seus movimentos vão perturbar a superfície livre e formar ondas. As ondas serão mais ou menos significativas de acordo com o movimento do corpo, seu diâmetro e sua proximidade da superfície livre. O movimento retilíneo do corpo gera ondas de Kelvin (radiação). Se o corpo oscila com amplitudes menores que seu diâmetro, perto da superfície livre ou flutuando, vai gerar ondas e não haverá efeitos viscosos relevantes. Ondas serão radiadas do corpo para o meio. O comprimento das ondas será definido de acordo com o período de oscilação. Se o corpo estiver flutuando livre, sob a ação de ondas regulares, estas vão carregar o corpo. As ondas formadas pela presença do corpo têm comprimento de onda igual ao da onda incidente. Considerando-se o corpo fixo, temos a difração. Além disso, como ele se move, temos a radiação. Consideremos as equações de movimento para o movimento vertical do corpo. Tem-se a seguinte equação dinâmica: ( M + m)&x & + cx& + kx = F FK + F DIF (12-24) Para excitações harmônicas, considerando o sistema linear, se F e iwt FK, 0 e F e iwt DIF, 0, então a resposta também será na freqüência da excitação, ou seja, iwt x = x0e, portanto (12-25) 2 ( M + m) w x0 + iwcx0 + kx0 = F FK,0 + FDIF,0 No caso da linha de mangotes flutuante, de pequeno diâmetro quando comparado ao comprimento de onda, onde o valor relativo de w é muito pequeno e a FDIF, 0 é também desprezível, então a equação de movimentos se reduz a kx = ρ gbx = F (12-26) 0 0 FK,0 179
198 Ou seja, a força de Froude-Krilov se reduz simplesmente ao acréscimo de empuxo devido à elevação da onda. A variável B, no caso, é a boca ou a dimensão transversal na linha de água. As forças apresentadas são sempre por unidade de comprimento, já que estamos considerando o problema plano. Em outras palavras, o corpo simplesmente vai com a onda, seguindo o seu perfil de elevação, já que a força de Froude-Krilov se reduz a F FK = ρgb. ξ 0 Para o movimento na direção axial do corpo, sob as mesmas considerações e simplificando para o caso linear, com pouco amortecimento já que a presença do corpo pouco perturba o fluxo, chega-se também à conclusão de que o corpo segue o movimento da onda, com a mesma amplitude. Seguindo a mesma linha de raciocínio, no caso do corpo sob a ação de onda e correnteza, deve-se considerar a formulação de Morison para descrever as forças no movimento horizontal e a força de Lift (sustentação) para o movimento vertical. Porém, mesmo assim, desprezível, pois o corpo vai com a onda. Conclui-se, portanto, que a aplicação da fórmula de Morison estendida, considerando o movimento relativo do corpo em relação ao fluido é aplicável e representa bem os efeitos hidrodinâmicos sobre um corpo esbelto flutuando ou submerso, quando sua dimensão é muito menor que o comprimento de onda. 180
199 Coeficientes Hidrodinâmicos Encontram-se na literatura várias referências sobre o cálculo de forças de onda sobre elementos esbeltos que estão totalmente submersos, sem fazer muita referência aos elementos que estejam flutuando e, portanto, parcialmente submersos ao longo do seu comprimento. O efeito que mais interessa, neste caso, é justamente o efeito hidrostático da onda, considerando o perfil instantâneo da mesma. As forças de arrasto viscoso, dependentes exclusivamente da velocidade relativa entre a estrutura e o fluido, são geralmente obtidas através de ensaios, constituindo assim um modelo semi-empírico. Este capítulo apresenta considerações sobre os coeficientes C D e C M, conforme adotados na formulação de Morison, e a extensão do conceito para as linhas flutuantes Coeficiente de Arrasto A determinação dos coeficientes de arrasto (C D ) é fundamental para o cálculo hidrodinâmico de estruturas flutuantes em geral, sejam de grande ou pequeno porte, tal como colunas de semi-submersível e TLP, bem como em estruturas esbeltas como risers, linhas de ancoragem e tendões. A depender da configuração do elemento, os coeficientes de arrasto podem depender de vários parâmetros, conforme Tabela Tabela 12.3: Adimensionais que Influenciam no Coeficiente de Arrasto Número de Reynolds: Re = UD/ν Número de Keulegan-Carpenter: KC = U m T/D Rugosidade (Roughness number): Δ = k/d U = velocidade característica do fluido D = dimensão característica do corpo ν = viscosidade cinemática Um = amplitude de velocidade da partícula fluída do fluxo oscilatório que passa pelo corpo T = Período característico k = dimensão característica transversal, ou altura média da superfície rugosa 181
200 Figura 12-9: Regime de Fluxo de um Fluido Real em Torno de uma Seção Cilíndrica [53] De uma forma geral, a maioria das estruturas flutuantes, incluindo elementos esbeltos, está sujeita a altos números de Reynolds. Por exemplo, uma linha com diâmetro de 30 cm, sob uma correnteza de 1.0 m/s, apresenta Reynolds na ordem de 2.8 x Para os elementos cilíndricos flutuantes, podem-se tirar os coeficientes de arrasto de ensaios cativos de reboque em tanque de prova, como é normalmente feito para navios. 182
201 Para estrutura em águas profundas, a velocidade da partícula decai exponencialmente com a profundidade (e 2π ζ/λ ). Assim, se o elemento se encontrar em uma profundidade superior a três vezes o comprimento de onda, a contribuição da velocidade onda pode ser desprezada. Portanto, para estruturas esbeltas, pode-se dividir o problema em duas zonas de interesse, uma dela junto à superfície, onde age o campo de velocidades de corrente e onda e outra distante da superfície, onde age somente o campo de velocidade de corrente. Para cada uma destas zonas, têm-se coeficientes de arrasto diferentes, uma vez que o regime de velocidades é diferente em cada uma delas. Para fluxos constantes, não oscilatórios, o número de Keulegan-Carpenter não é relevante, ficando a força de arrasto dependente apenas dos números de Reynolds e da rugosidade. Para fluxos bidimensionais sobre cilindros circulares, encontram-se fórmulas relacionando o coeficiente de arrasto com o número de Reynolds e a rugosidade. O aumento de rugosidade altera a intensidade e a forma da curva de C D, portanto, é importante considerar o crescimento de cracas na superfície molhada. Uma forma simples de considerar o crescimento de cracas é aumentar o coeficiente de arrasto de da seguinte forma: C Dgrowth = C [ 1+ 2( δt D)] (12-27) D growth Onde δt growth é a espessura da camada de cracas e D o diâmetro do elemento com superfície limpa e lisa. Não se pode esquecer que junto à superfície o coeficiente de arrasto depende da velocidade de ondas, além da velocidade de corrente, e, portanto, C D também depende do número de Keulegan-Carpenter. 183
202 Os ensaios em escala reduzida apresentam disparidades com o protótipo por causa de a semelhança ser feita apenas com o número de Froude, uma vez que a viscosidade não é escalável. Neste caso, há uma tendência de os coeficientes C D nos ensaios serem maiores que em escala real, demandando correções geométricas ou através de excitadores de turbulência, a depender do caso. Por causa da dificuldade em se escolher exatamente o regime do fluxo ao redor do corpo, principalmente quando próximo a outras estruturas e sujeito a fluxos oscilatórios, aconselha-se que o valor do coeficiente de arrasto seja escolhido de forma a considerar o efeito global de força e amortecimento que ele provoca na estrutura em estudo. Além disso, o coeficiente de arrasto também vai depender das oscilações de alta freqüência, transversais ao fluxo, provocadas pelos efeitos de liberação de vórtices (Vortex Induced Vibration). A utilização de supressores de VIV também provoca aumento no C D aparente da estrutura. Tabela 12.4: Valores do Coeficiente de Arrasto para o Modelo (Escala Reduzida) Valores de C D para cabo de aço, amarra e risers em escala reduzida R e C D Notas Cabos de aço na escala do modelo D = mm, em reboque Escala 1:200 1: D = mm, em reboque Amarra na escala do modelo D = 1.05 mm, em reboque Escala 1:200 1:55 Risers na escala do modelo Risers equivalente, 1:200 1: Catenária simples, escala 1:
203 Tabela 12.5: Valores do Coeficiente de Arrasto para o Protótipo (Escala Real) Valores de C D para cabos de aço, amarras e risers em escala real R e C D Notas Cabos de aço em escala real D = mm, drop tests D = 78 mm, em reboque D = 147 mm, vel. = 1 m/s Cabos de aço em escala real D = 30 mm, KC = D = 30 mm, em reboque D = 65 mm, em reboque D = 140 mm, vel. = 1 m/s Risers em escala real D = 200 mm Tabela 12.6: Valores Típicos para o Coeficiente de Arrasto em Função do Número de Reynolds Valores típicos de C D para R e = Tipo Faixa de C D Cabo de aço de 6 tranças Cabo spiral strand sem capa Cabo spiral strand com capa Amarra com malhete (relativo ao diâmetro nominal) Amarra sem malhete (relativo ao diâmetro nominal) Risers metálicos (Steel Catenary Risers) Risers flexíveis
204 Coeficiente de Inércia Podem-se obter o coeficiente total de inércia (C M ) ou o de massa adicional (C AD ), considerando apenas a teoria potencial no plano. Obtendo-se assim valores típicos para seções cilíndricas totalmente submersas no fluido, considerando o fluxo bidimensional. Porém, para os casos propostos neste trabalho, considerando que a linha de transferência tem um longo trecho flutuante, os coeficientes apresentados nas diversas referências não se aplicam diretamente Considerações Práticas sobre os Coeficientes de Arrasto e Inércia Na consideração dos esforços hidrodinâmicos sobre a estrutura, o perfil de velocidades deve ser estendido acima do nível médio de ondas, até a superfície instantânea, cobrindo toda a área molhada dos elementos. Uma proposta consistente é dada pelo método de Wheeler [52], que fornece uma proposta consistente para se estimar o campo de velocidades até a superfície livre do fluido. Uma estrutura é considerada esbelta do ponto de vista hidrodinâmico, quando o comprimento de onda é 5 vezes superior a sua dimensão transversal característica. Para estes casos, aplica-se a equação de Morison, usando como velocidade total da particular a soma das velocidades de onda e de correnteza. Para estruturas com velocidade relativa ao fluido pequena, as ações das ondas podem ser calculadas, considerando: 1. Se, o número de Keulegan-Carpenter, KC < 2, as forças hidrodinâmicas devem ser calculadas por meio de teoria potencial, no entanto: a. Se a razão λ/d > 5, o termo de inércia da fórmula de Morison pode ser usado como C M = 2.0 b. Se a razão λ/d < 5, deve-se usar a teoria da Difração [44] [49] [50] [51]. 186
205 2. Se KC > 2, a ação das ondas pode ser calculada por meio da equação de Morison, com C D e C M em função do número de Reynolds, número de KC e também da rugosidade relativa. Deve-se observer que a formulação de Morison ignora as forças de sustentação (Lift), forças de impacto e as forças de Froude- Krylov axiais. 3. Para os elementos estruturais inclinados em relação à superfície do mar, como membros de jaquetas ou risers saindo da água, os esforços hidrodinâmicos extremos sobre elementos fora de qualquer sombra são calculados com base em coeficientes de arrasto e inércia, tal como: i. C D = 0.65 e C M = 1.6 para cilindros lisos, condição de instalação. ii. C D = 1.05 e C M = 1.2 para cilindros rugosos. Estes valores são aplicáveis para KC = U max T i /D > 30, onde U max é a velocidade horizontal máxima da partícula fluida no nível médio do mar sob a crista da onda, T i é o período característico da onda e D é o diâmetro característico do elemento. De qualquer forma, é conveniente que se considere sempre a velocidade e acelerações perpendiculares ao elemento cilíndrico esbelto. 4. Para as condições de fluxo com U max T i /D < 30 para mares regulares que normalmente ocorrem em condições relevantes para fadiga. Neste caso, C D e C M dependem do nível de excitação das ondas, conforme parametrizado pelo número KC. Para 1.0 < KC < 6.0, os coeficientes hidrodinâmicos podem ser dados por: c. C D = 0.65 e C M = 2.0 (elemento liso, condição de instalação) d. C D = 0.80 e C M = 2.0 (elemento com rugosidade superficial) 187
206 5. Simulações no domínio do tempo são necessárias ara os elementos esbeltos que estão sujeitos a significativas acelerações induzidas pelas ondas. Recomenda-se ainda mais que sejam considerados os efeitos de segunda ordem, tanto na elevação das ondas, quanto na sua cinemática. Nenhum fator de redução é recomendável, nestes casos. Expansões em séries de Fourier são úteis para se representar os mares irregulares e também os efeitos de segunda ordem. 6. Para as simulações no domínio do tempo, as calibrações geralmente são feitas de forma estática, considerando velocidades típicas para estados de mar extremos. Como uma primeira aproximação, pode-se adotar para as estruturas dominadas por forças viscosas de arrasto C D = 1.15 e C M conforme as indicações dos itens 3 e 4 acima. 7. Para elementos cilíndricos esbeltos que estão muito próximos, fazendo sombra hidrodinâmica um sobre os outros, um possível acréscimo da massa adicional deve ser considerado. 188
207 13 ANEXO SIMILARIDADE ENTRE MODELO E PROTÓTIPO Similaridade Cinemática A razão de escala de comprimento equivale simplesmente a uma similaridade geométrica, porém a equivalência na escala de tempo vai requerer considerações dinâmicas adicionais, tais como a equivalência de Reynolds e de Mach. Um caso especial é o de fluxos incompressíveis, sem atrito e sem superfície livre, como mostrado na Figura 13-1(a). Estes escoamentos de fluido perfeito são cinematicamente similares com escalas independentes de tempo e comprimento, e nenhum outro parâmetro adicional é requerido. Escoamentos sem atrito, como ilustrado na Figura 13-1(b), são cinematicamente similares se os números de Froude forem iguais. Assim, V 2 2 Vm p Fr m = = = glm glp Fr p (13-1) Observa-se que o número de Froude contém somente dimensões de comprimento e tempo e, portanto, é um parâmetro geométrico que fixa a relação entre estas escalas. Da equação (13-1), se a escala de comprimento é: L = α m L p (13-2) Onde, α é a razão adimensional de comprimento, a escala de velocidades é: p 1/ 2 V m Lm = = α V p Lp E a escala de tempo é: Lm Tm Vm = = α T L p p V (13-3) (13-4) 189
208 O número de Froude apresenta relações cinemáticas de escala, conforme está ilustrado na Figura 13-1(b) para modelo de ondas de gravidade. Se as alturas de onda são relacionadas pela escala de comprimento α, então o período de onda, a velocidade da partícula e a velocidade de propagação estão relacionadas na razão de α. No entanto, se a viscosidade, tensão superficial ou compressibilidade são importantes a similaridade cinemática dependerá também de resultados advindos da similaridade dinâmica entre o modelo e o protótipo. Figura 13-1: Escoamentos sem Atrito e de Baixa Velocidade Conforme Figura 13-1, escoamentos sem atrito e de baixa velocidade são cinematicamente similares quando: (a) Fluxos sem superfície livre são similares apenas mantendo independentemente a razão de escala de comprimento e de tempo; (b) Fluxos com superfície livre são cinematicamente similares com as escalas de comprimento e de tempo relacionadas através do número de Froude. 190
209 Similaridade Dinâmica Similaridade dinâmica existe quando o modelo e o protótipo têm a mesma razão de escala de comprimentos, tempo e força. Novamente a similaridade geométrica é o primeiro requisito, sem o qual nada mais fica válido. Portanto, a similaridade dinâmica existe, simultaneamente com a similaridade cinemática, se os coeficientes de força e de pressão no modelo e no protótipo forem idênticos. Isto é garantido para escoamentos incompressíveis, sem superfície livre, se os números de Reynolds do modelo e protótipo forem iguais. Com superfície livre, se os números de Froude e Reynolds forem iguais, além dos números de Weber [53] e de Cavitação, quando necessário. Matematicamente, a Lei de Newton, para qualquer partícula fluida, requer que a soma das forças de pressão, gravidade e atrito sejam iguais as forças de inércia, proporcionais, portanto, à aceleração. F + F + F = F p g f i (13-5) As leis de similaridade dinâmica, listadas acima, garantem que cada uma destas forças terá a mesma razão de escala entre o modelo e o protótipo. A Figura 13-1 mostra um exemplo de fluxo por uma barreira com abertura inferior. O polígono de forças e a geométrica do fluxo manterão exatamente a mesma forma se os números de Reynolds e de Froude forem iguais para o modelo e o protótipo, desprezando naturalmente os efeitos de tensão superficial e de cavitação. Assim, a similaridade cinemática também é garantida. 191

210 Discrepâncias que Aparecem nos Testes em Água A perfeita similaridade dinâmica da Figura 13-1 é hipotética e teórica apenas, pois a verdadeira equivalência dos números de Reynolds e Froude é conseguida apenas se for possível mudanças drásticas nas propriedades do fluído. No entanto, a maioria dos testes é viável de se realizar apenas em água ou ar. No caso de modelos hidráulicos com superfície livre, a similaridade dinâmica requer equivalência do número de Froude, Eq. (13-1), e do de Reynolds VmL v m V m p p = (13-6) v L p Figura 13-2: Similaridade Dinâmica de Fluxo Hidráulico Através de Barreira com Abertura Inferior. (a) Protótipo; (b) Modelo O modelo e o protótipo da Figura 13-2 [24] só apresentarão polígonos de força e regime de fluxo semelhante se os números de Reynolds e Froude forem os mesmos, condição impossível de ser atendida para os casos práticos comuns em engenharia naval [6] [7]. 192
 é verdadeira somente se: v v m p L = L m p V V m p = α α = α 3/ 2 (13-7) 2 Por exemplo, para um modelo em escala de 1:10, α = 0, 1 e α 3 / = 0, 032.")
211 Porém, a velocidade e o comprimento estão relacionados pelo número de Froude, Eqs. (13-2) e (13-3). Portanto, para uma dada razão de escala de comprimentos α, Eq.(13-6) é verdadeira somente se: v v m p L = L m p V V m p = α α = α 3/ 2 (13-7) 2 Por exemplo, para um modelo em escala de 1:10, α = 0, 1 e α 3 / = 0, 032. Uma vez que a viscosidade cinemática do protótipo v p é sem dúvida a da água, necessita-se de um fluído que apresente viscosidade cinemática vezes a da água para se chegar a similaridade dinâmica total. Nota-se que em termos práticos isto é impossível, pois mesmo o mercúrio tem somente 1/9 da viscosidade cinemática da água, além de ser economicamente e praticamente inviável um modelo sendo testado em um tanque de mercúrio. Na prática, a água é usada tanto para o protótipo quanto para o modelo e a condição de similaridade pelo número de Reynolds, Eq. (13-6), é violada. O número de Froude é mantido constante, uma vez que é o parâmetro dominante para escoamentos em superfície livre. Tipicamente, os números de Reynolds dos modelos chegam a ser de 10 a 1000 vezes menores que os dos protótipos. Na Figura 13-3 [47], os números de Reynolds dos modelos são usados para estimar por extrapolação os números de Reynolds desejáveis para os protótipos. Obviamente, existem grandes incertezas nessas extrapolações. Figura 13-3: Extrapolações do Número de Reynolds, ou Escalamento dos Dados Hidrodinâmicos para Sistemas com o Mesmo Número de Froude 193

212 Figura 13-4: Modelo Hidráulico de um Canal de Grande Área com Pequena Profundidade Finalmente, uma séria discrepância de outra natureza ocorre em modelos hidrodinâmicos de fluxos naturais de água, como rios, portos, estuários e baias. Tais escoamentos têm dimensões horizontais muito grandes quando comparados com as dimensões verticais. Assim, se fossemos escalar um fluxo com grandes dimensões horizontais, numa escala de 1:1000, por exemplo, poderíamos ter apenas alguns milímetros de profundidade e teríamos neste caso influencias espúrias da tensão superficial, ou seja, o número de Weber [24] [53] passaria a ser significativo e a reger o fenômeno. Portanto, tais modelos requerem violações na similaridade geométrica, distorcendo-se a escala vertical por um fator de 10 ou mais vezes superior ao da escala horizontal, além de não conseguir similaridade dinâmica através número de Reynolds. A Figura 13-4 [47] mostra um modelo hidráulico de uma praia no qual a escala de redução horizontal é de 1:300, enquanto que a vertical é de apenas 1:60. Desta forma o canal flui mais eficientemente, propositadamente a rugosidade do fundo do canal é aumentada para se tentar corrigir a discrepância geométrica adotada. Embora o atrito corrija parcialmente o efeito desta discrepância, outras relacionadas com transmissão de calor e massa permanecem ainda desconhecidas e certamente não bem avaliadas. 194
213 14 ANEXO SÉRIES TEMPORAIS DE ENSAIOS EM ESCALA REDUZIDA Configuração Estivada Séries Temporais com Variação de Correnteza Força (Hs = 4m, Tp = 12,5s, Gamma = 1,8 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 195
214 Ângulo (Hs = 4m, Tp = 12,5s, Gamma = 1,8 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 196
215 Força (Hs = 2,5m, Tp = 12,5s, Gamma = 1,8 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 197
216 Ângulo (Hs = 2,5m, Tp = 12,5s, Gamma = 1,8 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 198
217 Força (Hs = 4m, Tp = 12,5s, Gamma = 1,8 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 199
218 Ângulo (Hs = 4m, Tp = 12,5s, Gamma = 1,8 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 200


219 Força (Hs = 2,5m, Tp = 12,5s, Gamma = 1,8 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 201
220 Ângulo (Hs = 2,5m, Tp = 12,5s, Gamma = 1,8 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 202
221 Séries Temporais com Variação de Altura de Onda Força Travado. - C=0m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Travado - C=0m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m 203
222 Força - Travado. - C=0,7 m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Travado - C=0,7 m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m 204
223 Força - Travado. - C=2,1m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Travado. - C=2,1m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m 205
224 Força - Mov.Imp. - C=0m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Mov.Imp. - C=0m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m 206
225 Força - Mov.Imp. - C=0,7m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Mov.Imp. - C=0,7 m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m 207
 Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Mov.Imp.")
226 Força - Mov.Imp. - C=2,1m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m Ângulo - Mov.Imp. - C=2,1 m/s (Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 4,0m 208
 Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov.")
227 Séries Temporais com e sem Imposição de Movimento Força - C=0m/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0m/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 209
228 Força - C=0m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 210
 Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov.")
229 Força - C=0,7/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0,7m/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 211
230 Força - C=0,7m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0,7m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 212
231 Força - C=2,1/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=2,1m/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 213
 Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov.")
232 Força - C=2,1m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=2,1m/s (Hs=4,0m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 214
233 Configuração em Offloading Séries Temporais com Variação de Correnteza Força - Travado - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 1,1 m/s Ângulo - Travado - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 1,1 m/s 215
234 Força Mov.Imposto - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 1,1 m/s Ângulo Mov.Imposto - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 1,1 m/s 216
235 Séries Temporais com e sem Imposição de Movimento Força C=0,0 m/s - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo C=0,0 m/s - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 217
 Corrente Mangote Convencional")

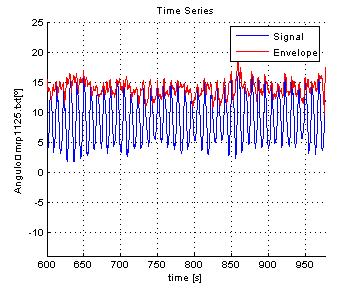
236 Força C=1,1 m/s - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo C=1,1 m/s - (Hs=3,5m, Tp = 9s, Gamma = 2,2) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 218
237 Configuração em Abandono Séries Temporais com Variação de Correnteza Força (Hs = 2,5m, Tp = 9,3s, Gamma = 2,14 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 219
238 Ângulo (Hs = 2,5m, Tp = 9,3s, Gamma = 2,14 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 220
239 Força (Hs = 3,375m, Tp = 9,3s, Gamma = 2,14 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 221
240 Ângulo (Hs = 3,375m, Tp = 9,3s, Gamma = 2,14 - Travado) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 222
241 Força (Hs = 2,5m, Tp = 9,3s, Gamma = 2,14 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 223
242 Ângulo (Hs = 2,5m, Tp = 9,3s, Gamma = 2,14 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 224
243 Força (Hs = 3,375m, Tp = 9,3s, Gamma = 2,14 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 225
244 Ângulo (Hs = 3,375m, Tp = 9,3s, Gamma = 2,14 - Mov.Imp.) Corrente Mangote Convencional Flutuabilidade Controlada 0,0 m/s 0,7 m/s 2,1 m/s 226
245 Séries Temporais com Variação de Altura de Onda Força Travado - C=0m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m Ângulo - Travado - C=0m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m 227
246 Força - Travado. - C=0,7 m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m Ângulo - Travado - C=0,7 m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m 228
247 Força - Travado. - C=2,1m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m Ângulo - Travado. - C=2,1m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m 229
248 Força - Mov.Imp. - C=0m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m Ângulo - Mov.Imp. - C=0m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m 230
249 Força - Mov.Imp. - C=0,7m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m Ângulo - Mov.Imp. - C=0,7 m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m 231
250 Força - Mov.Imp. - C=2,1m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m Ângulo - Mov.Imp. - C=2,1 m/s (Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Hs = 2,5m Hs = 3,375m 232
 Corrente Mangote Convencional Flutuabilidade Controlada")
251 Séries Temporais com e sem Imposição de Movimento Força - C=0m/s (Hs=2,5m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0m/s (Hs=2,5m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 233
252 Força - C=0m/s (Hs=3,375m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0m/s (Hs=3,375m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 234
 Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov.")
253 Força - C=0,7/s (Hs=2,5m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0,7m/s (Hs=2,5m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 235
 Corrente Mangote Convencional")

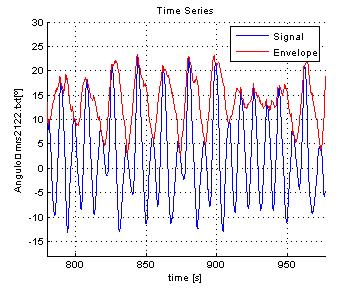
254 Força - C=0,7m/s (Hs=3,375m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=0,7m/s (Hs=3,375m, Tp = 9,3s, Gamma = 2,14) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 236
 Corrente Mangote Convencional")

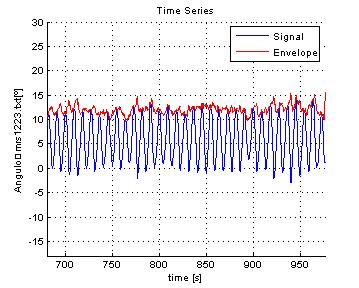
255 Força - C=2,1/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=2,1m/s (Hs=2,5m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 237
 Corrente")



256 Força - C=2,1m/s (Hs=3,375m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto Ângulo - C=2,1m/s (Hs=3,375m, Tp = 12,5s, Gamma = 1,8) Corrente Mangote Convencional Flutuabilidade Controlada Travado Mov. Imposto 238
PNV Introdução à Engenharia PNV3100 Aula S2. Simulação de um projeto de engenharia Apresentação do projeto temático
 PNV3100 Aula S2 Simulação de um projeto de engenharia Apresentação do projeto temático Objetivos COMPREENDER CERTOS PROCEDIMENTOS EM ENGENHARIA: Identificar necessidades / demandas Enunciar problemas Formular
PNV3100 Aula S2 Simulação de um projeto de engenharia Apresentação do projeto temático Objetivos COMPREENDER CERTOS PROCEDIMENTOS EM ENGENHARIA: Identificar necessidades / demandas Enunciar problemas Formular
Operações de Ancoragem
 Operações de Ancoragem PNV 2587 Prof. Dr. André Bergsten Mendes Indústria Offshore Distanciamento da costa Estruturas maiores Infra-estrutura: plantas de processamento Armazenamento Mão-de-obra Logística
Operações de Ancoragem PNV 2587 Prof. Dr. André Bergsten Mendes Indústria Offshore Distanciamento da costa Estruturas maiores Infra-estrutura: plantas de processamento Armazenamento Mão-de-obra Logística
UNIVERSIDADE FEDERAL DO ABC MATERIAIS E SUAS PROPRIEDADES (BC 1105) ENSAIOS MECÂNICOS ENSAIOS DE TRAÇÃO E FLEXÃO
 ENSAIOS MECÂNICOS ENSAIOS DE TRAÇÃO E FLEXÃO") 1 UNIVERSIDADE FEDERAL DO ABC CENTRO DE ENGENHARIA, MODELAGEM E CIÊNCIAS SOCIAIS APLICADAS MATERIAIS E SUAS PROPRIEDADES (BC 1105) ENSAIOS MECÂNICOS ENSAIOS DE TRAÇÃO E FLEXÃO 2 1. INTRODUÇÃO Algumas das
1 UNIVERSIDADE FEDERAL DO ABC CENTRO DE ENGENHARIA, MODELAGEM E CIÊNCIAS SOCIAIS APLICADAS MATERIAIS E SUAS PROPRIEDADES (BC 1105) ENSAIOS MECÂNICOS ENSAIOS DE TRAÇÃO E FLEXÃO 2 1. INTRODUÇÃO Algumas das
Conteúdo. Resistência dos Materiais. Prof. Peterson Jaeger. 3. Concentração de tensões de tração. APOSTILA Versão 2013
 Resistência dos Materiais APOSTILA Versão 2013 Prof. Peterson Jaeger Conteúdo 1. Propriedades mecânicas dos materiais 2. Deformação 3. Concentração de tensões de tração 4. Torção 1 A resistência de um
Resistência dos Materiais APOSTILA Versão 2013 Prof. Peterson Jaeger Conteúdo 1. Propriedades mecânicas dos materiais 2. Deformação 3. Concentração de tensões de tração 4. Torção 1 A resistência de um
ANÁLISE DO COMPORTAMENTO DA MONOBÓIA IMODCO-III E SUAS LINHAS DE ANCORAGEM. Aluizio de Amorim Pacheco
 ANÁLISE DO COMPORTAMENTO DA MONOBÓIA IMODCO-III E SUAS LINHAS DE ANCORAGEM Aluizio de Amorim Pacheco RIO DE JANEIRO, RJ - BRASIL JUNHO DE 2005 Resumo da Monografia como parte dos requisitos necessários
ANÁLISE DO COMPORTAMENTO DA MONOBÓIA IMODCO-III E SUAS LINHAS DE ANCORAGEM Aluizio de Amorim Pacheco RIO DE JANEIRO, RJ - BRASIL JUNHO DE 2005 Resumo da Monografia como parte dos requisitos necessários
ESCOAMENTOS UNIFORMES EM CANAIS
 ESCOAMENTOS UNIFORMES EM CANAIS Nome: nº turma INTRODUÇÃO Um escoamento em canal aberto é caracterizado pela existência de uma superfície livre. Esta superfície é na realidade uma interface entre dois
ESCOAMENTOS UNIFORMES EM CANAIS Nome: nº turma INTRODUÇÃO Um escoamento em canal aberto é caracterizado pela existência de uma superfície livre. Esta superfície é na realidade uma interface entre dois
FUNDAMENTAÇÃO HIDROMECÂNICA Princípios Básicos
 FUNDAMENTAÇÃO HIDROMECÂNICA Princípios Básicos Sistemas Hidráulicos podem ser descritos por leis que regem o comportamento de fluidos confinados em: regime permanente (repouso) invariante no tempo; regime
FUNDAMENTAÇÃO HIDROMECÂNICA Princípios Básicos Sistemas Hidráulicos podem ser descritos por leis que regem o comportamento de fluidos confinados em: regime permanente (repouso) invariante no tempo; regime
VÁLVULA DE FLUXO ANULAR
 1. INTRODUÇÃO 1.1. Funções e Forma de Operação A principal característica da válvula de fluxo anular (needle valve) é a capacidade de modular a vazão de forma linear mesmo na presença de elevados diferenciais
1. INTRODUÇÃO 1.1. Funções e Forma de Operação A principal característica da válvula de fluxo anular (needle valve) é a capacidade de modular a vazão de forma linear mesmo na presença de elevados diferenciais
1 Introdução 3. 2 Estática de partículas Corpos rígidos: sistemas equivalentes SUMÁRIO. de forças 67. xiii
 SUMÁRIO 1 Introdução 3 1.1 O que é a mecânica? 4 1.2 Conceitos e princípios fundamentais mecânica de corpos rígidos 4 1.3 Conceitos e princípios fundamentais mecânica de corpos deformáveis 7 1.4 Sistemas
SUMÁRIO 1 Introdução 3 1.1 O que é a mecânica? 4 1.2 Conceitos e princípios fundamentais mecânica de corpos rígidos 4 1.3 Conceitos e princípios fundamentais mecânica de corpos deformáveis 7 1.4 Sistemas
ANEXO V 9.3 SISTEMA DE FUNDEIO. O sistema de fundeio é composto por:
 ANEXO V 9.3 SISTEMA DE FUNDEIO O sistema de fundeio é composto por: - Aparelho de fundear e suspender Compreende a máquina de suspender (cabrestante ou molinete utilizado para içar a âncora) e os acessórios
ANEXO V 9.3 SISTEMA DE FUNDEIO O sistema de fundeio é composto por: - Aparelho de fundear e suspender Compreende a máquina de suspender (cabrestante ou molinete utilizado para içar a âncora) e os acessórios
UNIVERSIDADE FEDERAL DO ABC CENTRO DE ENGENHARIA, MODELAGEM E CIÊNCIAS SOCIAIS APLICADAS MATERIAIS E SUAS PROPRIEDADES (BC 1105)
") UNIVERSIDADE FEDERAL DO ABC CENTRO DE ENGENHARIA, MODELAGEM E CIÊNCIAS SOCIAIS APLICADAS MATERIAIS E SUAS PROPRIEDADES (BC 1105) ENSAIOS MECÂNICOS PARTE A ENSAIOS DE TRAÇÃO E FLEXÃO 2 1. INTRODUÇÃO Algumas
UNIVERSIDADE FEDERAL DO ABC CENTRO DE ENGENHARIA, MODELAGEM E CIÊNCIAS SOCIAIS APLICADAS MATERIAIS E SUAS PROPRIEDADES (BC 1105) ENSAIOS MECÂNICOS PARTE A ENSAIOS DE TRAÇÃO E FLEXÃO 2 1. INTRODUÇÃO Algumas
ADUÇÃO E DISTRIBUIÇÃO DE ÁGUA - INDÚSTRIA
 1. Introdução A Saint-Gobain Canalização possui uma gama completa de produtos para transporte de fluidos, como: Tubos, Conexões, Válvulas Tampões e Acessórios, fabricados em ferro fundido dúctil conforme
1. Introdução A Saint-Gobain Canalização possui uma gama completa de produtos para transporte de fluidos, como: Tubos, Conexões, Válvulas Tampões e Acessórios, fabricados em ferro fundido dúctil conforme
2.3.3 Norma canadense
 ap. 2 Revisão bibliográfica 47 2.3.3 Norma canadense Nos anos 80, o projeto de estruturas de madeira no anadá passou a incorporar as mudanças que se manifestaram em outros países e, sobretudo, tornando
ap. 2 Revisão bibliográfica 47 2.3.3 Norma canadense Nos anos 80, o projeto de estruturas de madeira no anadá passou a incorporar as mudanças que se manifestaram em outros países e, sobretudo, tornando
Escoamento completamente desenvolvido
 Escoamento completamente desenvolvido A figura mostra um escoamento laminar na região de entrada de um tubo circular. Uma camada limite desenvolve-se ao longo das paredes do duto. A superfície do tubo
Escoamento completamente desenvolvido A figura mostra um escoamento laminar na região de entrada de um tubo circular. Uma camada limite desenvolve-se ao longo das paredes do duto. A superfície do tubo
Lista de Exercícios Perda de Carga Localizada e Perda de Carga Singular
 Lista de Exercícios Perda de Carga Localizada e Perda de Carga Singular 1. (Petrobrás/2010) Um oleoduto com 6 km de comprimento e diâmetro uniforme opera com um gradiente de pressão de 40 Pa/m transportando
Lista de Exercícios Perda de Carga Localizada e Perda de Carga Singular 1. (Petrobrás/2010) Um oleoduto com 6 km de comprimento e diâmetro uniforme opera com um gradiente de pressão de 40 Pa/m transportando
Resistência dos Materiais Teoria 2ª Parte
 Condições de Equilíbrio Estático Interno Equilíbrio Estático Interno Analogamente ao estudado anteriormente para o Equilíbrio Estático Externo, o Interno tem um objetivo geral e comum de cada peça estrutural:
Condições de Equilíbrio Estático Interno Equilíbrio Estático Interno Analogamente ao estudado anteriormente para o Equilíbrio Estático Externo, o Interno tem um objetivo geral e comum de cada peça estrutural:
Tubo de Pitot. Usado para medir a vazão; Vantagem: Menor interferência no fluxo; Empregados sem a necessidade de parada;
 Tubo de Pitot Usado para medir a vazão; Vantagem: Menor interferência no fluxo; Empregados sem a necessidade de parada; Desvantagem: Diversas tecnologias, o que dificulta a calibração do equipamento (de
Tubo de Pitot Usado para medir a vazão; Vantagem: Menor interferência no fluxo; Empregados sem a necessidade de parada; Desvantagem: Diversas tecnologias, o que dificulta a calibração do equipamento (de
PACHECO, A. A. (1); MAGLUTA, C. (2); ROITMAN, N. (3) (1) (2) (3)
; MAGLUTA, C. (2); ROITMAN, N. (3) (1) (2) (3)") www.asaee.org.br DESENVOLVIMENTO DE UM MODELO REDUZIDO PARA ANÁLISE DO COMPORTAMENTO ACOPLADO ENTRE A PLATAFORMA P23 E O RISER HÍBRIDO AUTO-SUSTENTADO DA PLATAFORMA P52 PACHECO, A. A. (1); MAGLUTA, C.
www.asaee.org.br DESENVOLVIMENTO DE UM MODELO REDUZIDO PARA ANÁLISE DO COMPORTAMENTO ACOPLADO ENTRE A PLATAFORMA P23 E O RISER HÍBRIDO AUTO-SUSTENTADO DA PLATAFORMA P52 PACHECO, A. A. (1); MAGLUTA, C.
UNIVERSIDADE FEDERAL DE MINAS GERAIS ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA MECÂNICA ELEMENTOS FINITOS PARA ANÁLISE DE ESTRUTURAS
 UNIVERSIDADE FEDERAL DE MINAS GERAIS ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA MECÂNICA ELEMENTOS FINITOS PARA ANÁLISE DE ESTRUTURAS Trabalho Final Grupo: Carlos Alexandre Campos Miranda Diego Franca
UNIVERSIDADE FEDERAL DE MINAS GERAIS ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA MECÂNICA ELEMENTOS FINITOS PARA ANÁLISE DE ESTRUTURAS Trabalho Final Grupo: Carlos Alexandre Campos Miranda Diego Franca
PLATAFORMAS MARÍTIMAS. Response Amplitude Operator (RAO)
") PLATAFORMAS MARÍTIMAS Response Amplitude Operator (RAO) INTRODUÇÃO Projetos Navios Estruturas Flutuantes RAO é uma estatística de engenharia, ou um conjunto de tais estatísticas, que são usados para determinar
PLATAFORMAS MARÍTIMAS Response Amplitude Operator (RAO) INTRODUÇÃO Projetos Navios Estruturas Flutuantes RAO é uma estatística de engenharia, ou um conjunto de tais estatísticas, que são usados para determinar
Flexão. Tensões na Flexão. e seu sentido é anti-horário. Estudar a flexão em barras é estudar o efeito dos momentos fletores nestas barras.
 Flexão Estudar a flexão em barras é estudar o efeito dos momentos fletores nestas barras. O estudo da flexão que se inicia, será dividido, para fim de entendimento, em duas partes: Tensões na flexão; Deformações
Flexão Estudar a flexão em barras é estudar o efeito dos momentos fletores nestas barras. O estudo da flexão que se inicia, será dividido, para fim de entendimento, em duas partes: Tensões na flexão; Deformações
6 Análise Dinâmica. 6.1 Modelagem computacional
 6 Análise Dinâmica O presente capítulo apresenta um estudo do comportamento dinâmico da coluna de aço estaiada, abrangendo análises modais para determinação da freqüência natural, com e sem protensão [32]
6 Análise Dinâmica O presente capítulo apresenta um estudo do comportamento dinâmico da coluna de aço estaiada, abrangendo análises modais para determinação da freqüência natural, com e sem protensão [32]
1) Determine a energia de deformação (energia interna) da estrutura abaixo. Rigidez flexional = 4200 knm²
 Determine a energia de deformação (energia interna) da estrutura abaixo. Rigidez flexional = 4200 knm²") CE2 ESTABILIDADE DAS CONSTRUÇÕES II LISTA DE EXERCÍCIOS PREPARATÓRIA PARA O ENADE 1) Determine a energia de deformação (energia interna) da estrutura abaixo. Rigidez flexional 42 knm² Formulário: equação
CE2 ESTABILIDADE DAS CONSTRUÇÕES II LISTA DE EXERCÍCIOS PREPARATÓRIA PARA O ENADE 1) Determine a energia de deformação (energia interna) da estrutura abaixo. Rigidez flexional 42 knm² Formulário: equação
PLATAFORMAS MARÍTIMAS. Aula 04. Plataformas Flutuantes Parte 1
 PLATAFORMAS MARÍTIMAS Aula 04 Plataformas Flutuantes Parte 1 INTRODUÇÃO Produzir Plataformas Flutuantes Armazenar Produzir e Armazenar INTRODUÇÃO Plataformas Flutuantes Semi-Submersível FPSO TLP SPAR Semi-Submersível
PLATAFORMAS MARÍTIMAS Aula 04 Plataformas Flutuantes Parte 1 INTRODUÇÃO Produzir Plataformas Flutuantes Armazenar Produzir e Armazenar INTRODUÇÃO Plataformas Flutuantes Semi-Submersível FPSO TLP SPAR Semi-Submersível
MUROS DE ARRIMO. Tipos Drenagem Estabilidade Dimensionamento
 MUROS DE ARRIMO Tipos Drenagem Estabilidade Dimensionamento DEFINIÇÃO Muros são estruturas corridas de contenção de parede vertical ou quase vertical, apoiadas em uma fundação rasa ou profunda. DEFINIÇÃO
MUROS DE ARRIMO Tipos Drenagem Estabilidade Dimensionamento DEFINIÇÃO Muros são estruturas corridas de contenção de parede vertical ou quase vertical, apoiadas em uma fundação rasa ou profunda. DEFINIÇÃO
BARRAGENS DE TERRA E DE ENROCAMENTO AULA 3. Prof. Romero César Gomes - Departamento de Engenharia Civil / UFOP
 BARRAGENS DE TERRA E DE ENROCAMENTO AULA 3 Prof. Romero César Gomes - Departamento de Engenharia Civil / UFOP Análises da Estabilidade de Taludes de Barragens Escolha das Seções Críticas seção de altura
BARRAGENS DE TERRA E DE ENROCAMENTO AULA 3 Prof. Romero César Gomes - Departamento de Engenharia Civil / UFOP Análises da Estabilidade de Taludes de Barragens Escolha das Seções Críticas seção de altura
MUROS DE ARRIMO. Tipos Drenagem Estabilidade Dimensionamento
 MUROS DE ARRIMO Tipos Drenagem Estabilidade Dimensionamento DEFINIÇÃO Muros são estruturas corridas de contenção de parede vertical ou quase vertical, apoiadas em uma fundação rasa ou profunda. Podem ser
MUROS DE ARRIMO Tipos Drenagem Estabilidade Dimensionamento DEFINIÇÃO Muros são estruturas corridas de contenção de parede vertical ou quase vertical, apoiadas em uma fundação rasa ou profunda. Podem ser
3 Modelo de Torque e Arraste
 3 Modelo de Torque e Arraste Os modelos de torque e arraste são utilizados para dar suporte ao planejamento de poços e ajudar na previsão e prevenção de problemas operacionais durante a perfuração. Estes
3 Modelo de Torque e Arraste Os modelos de torque e arraste são utilizados para dar suporte ao planejamento de poços e ajudar na previsão e prevenção de problemas operacionais durante a perfuração. Estes
ENG1200 Mecânica Geral Semestre Lista de Exercícios 6 Corpos Submersos
 ENG1200 Mecânica Geral Semestre 2013.2 Lista de Exercícios 6 Corpos Submersos 1 Prova P3 2013.1 - O corpo submerso da figura abaixo tem 1m de comprimento perpendicularmente ao plano do papel e é formado
ENG1200 Mecânica Geral Semestre 2013.2 Lista de Exercícios 6 Corpos Submersos 1 Prova P3 2013.1 - O corpo submerso da figura abaixo tem 1m de comprimento perpendicularmente ao plano do papel e é formado
Exemplo. T 1 2g = -2a T 2 g = a. τ = I.α. T 1 T 2 g = - 3a a g = - 3a 4a = g a = g/4. τ = (T 1 T 2 )R. T 1 T 2 = Ma/2 T 1 T 2 = a.
R. T 1 T 2 = Ma/2 T 1 T 2 = a.") Exercícios Petrobras 2008 eng. de petróleo Dois corpos de massa m 1 = 2 kg e m 2 = 1 kg estão fixados às pontas de uma corda com massa e elasticidade desprezíveis, a qual passa por uma polia presa ao
Exercícios Petrobras 2008 eng. de petróleo Dois corpos de massa m 1 = 2 kg e m 2 = 1 kg estão fixados às pontas de uma corda com massa e elasticidade desprezíveis, a qual passa por uma polia presa ao
UNIVERSIDADE DE SÃO PAULO ESCOLA SUPERIOR DE AGRICULTURA LUIZ DE QUEIROZ DEPARTAMENTO DE ENGENHARIA DE BIOSSISTEMAS AULA 3 ROTEIRO
 1 UNIVERSIDADE DE SÃO PAULO ESCOLA SUPERIOR DE AGRICULTURA LUIZ DE QUEIROZ DEPARTAMENTO DE ENGENHARIA DE BIOSSISTEMAS LEB 047 HIDRÁULICA Prof. Fernando Campos Mendonça AULA 3 ROTEIRO Tópicos da aula 3:
1 UNIVERSIDADE DE SÃO PAULO ESCOLA SUPERIOR DE AGRICULTURA LUIZ DE QUEIROZ DEPARTAMENTO DE ENGENHARIA DE BIOSSISTEMAS LEB 047 HIDRÁULICA Prof. Fernando Campos Mendonça AULA 3 ROTEIRO Tópicos da aula 3:
Acesse:
 Segurando as pontas As operações de tornear superfícies cilíndricas ou cônicas, embora simples e bastante comuns, às vezes apresentam algumas dificuldades. É o que acontece, por exemplo, com peças longas
Segurando as pontas As operações de tornear superfícies cilíndricas ou cônicas, embora simples e bastante comuns, às vezes apresentam algumas dificuldades. É o que acontece, por exemplo, com peças longas
1 Introdução 1.1. Caracterização do Problema
 21 1 Introdução 1.1. Caracterização do Problema O início da exploração de petróleo em reservatórios situados na área offshore no Brasil se deu em 1968, na Bacia de Sergipe, campo de Guaricema, situado
21 1 Introdução 1.1. Caracterização do Problema O início da exploração de petróleo em reservatórios situados na área offshore no Brasil se deu em 1968, na Bacia de Sergipe, campo de Guaricema, situado
Curso de Dimensionamento de Estruturas de Aço Ligações em Aço EAD - CBCA. Módulo
 Curso de Dimensionamento de Estruturas de Aço Ligações em Aço EAD - CBCA Módulo 3 Sumário Módulo 3 Dimensionamento das vigas a flexão 3.1 Dimensionamento de vigas de Perfil I isolado página 3 3.2 Dimensionamento
Curso de Dimensionamento de Estruturas de Aço Ligações em Aço EAD - CBCA Módulo 3 Sumário Módulo 3 Dimensionamento das vigas a flexão 3.1 Dimensionamento de vigas de Perfil I isolado página 3 3.2 Dimensionamento
hydrostec VÁLVULAS DE REGULAÇÃO MULTIJATO Atuador Redutor Transmissor de posição Suporte Arcada Corpo Eixo Placa móvel Placa fixa
 B30.15.0-P VÁLVULAS DE REGULAÇÃO ULTIJATO Regulação da vazão e pressão Atuador Redutor Transmissor de posição Suporte Arcada Corpo Eixo Placa móvel Placa fixa A Válvula Regulação ultijato, foi desenvolvida
B30.15.0-P VÁLVULAS DE REGULAÇÃO ULTIJATO Regulação da vazão e pressão Atuador Redutor Transmissor de posição Suporte Arcada Corpo Eixo Placa móvel Placa fixa A Válvula Regulação ultijato, foi desenvolvida
Flexão. Diagramas de força cortante e momento fletor. Diagramas de força cortante e momento fletor
 Capítulo 6: Flexão Adaptado pela prof. Dra. Danielle Bond Diagramas de força cortante e momento fletor Elementos delgados que suportam carregamentos aplicados perpendicularmente a seu eixo longitudinal
Capítulo 6: Flexão Adaptado pela prof. Dra. Danielle Bond Diagramas de força cortante e momento fletor Elementos delgados que suportam carregamentos aplicados perpendicularmente a seu eixo longitudinal
4 Modelo analítico 84
 4 Modelo analítico 84 4 Modelo analítico O objetivo desta seção é apresentar uma metodologia de cálculo que servirá de base comparativa aos resultados dos métodos de elementos finitos empregados na seção
4 Modelo analítico 84 4 Modelo analítico O objetivo desta seção é apresentar uma metodologia de cálculo que servirá de base comparativa aos resultados dos métodos de elementos finitos empregados na seção
VENTILAÇÃO LOCAL EXAUSTORA - DUTOS. 10º Período de Engenharia Mecânica
 VENTILAÇÃO LOCAL EXAUSTORA - DUTOS 10º Período de Engenharia Mecânica Fernando Coradi Engenheiro Mecânico Engenheiro em Segurança do Trabalho Mestrando em Engenharia de Energia 1 Referências Bibliográficas
VENTILAÇÃO LOCAL EXAUSTORA - DUTOS 10º Período de Engenharia Mecânica Fernando Coradi Engenheiro Mecânico Engenheiro em Segurança do Trabalho Mestrando em Engenharia de Energia 1 Referências Bibliográficas
Carga axial. Princípio de Saint-Venant
 Carga axial Princípio de Saint-Venant O princípio Saint-Venant afirma que a tensão e deformação localizadas nas regiões de aplicação de carga ou nos apoios tendem a nivelar-se a uma distância suficientemente
Carga axial Princípio de Saint-Venant O princípio Saint-Venant afirma que a tensão e deformação localizadas nas regiões de aplicação de carga ou nos apoios tendem a nivelar-se a uma distância suficientemente
CURSO SUPERIOR DE ENGENHARIA CIVIL TEORIA DAS ESTRUTURAS II
 CURSO SUPERIOR DE ENGENHARIA CIVIL TEORIA DAS ESTRUTURAS II PROFESSOR: Eng. CLÁUDIO MÁRCIO RIBEIRO ESPECIALISTA EM ESTRUTURAS Estrutura Definição: Estrutura é um sistema destinado a proporcionar o equilíbrio
CURSO SUPERIOR DE ENGENHARIA CIVIL TEORIA DAS ESTRUTURAS II PROFESSOR: Eng. CLÁUDIO MÁRCIO RIBEIRO ESPECIALISTA EM ESTRUTURAS Estrutura Definição: Estrutura é um sistema destinado a proporcionar o equilíbrio
Propriedades mecânicas dos materiais
 Propriedades mecânicas dos materiais Ensaio de tração e compressão A resistência de um material depende de sua capacidade de suportar uma carga sem deformação excessiva ou ruptura. Essa propriedade é inerente
Propriedades mecânicas dos materiais Ensaio de tração e compressão A resistência de um material depende de sua capacidade de suportar uma carga sem deformação excessiva ou ruptura. Essa propriedade é inerente
R.T. Eng. Geotécnico Prof. Edgar Pereira Filho. de determinar as características geométricas e submetê-las a uma força de impacto.
 ENSAIOS DE CARREGAMENTO DINÂMICO RESUMO Neste breve artigo apresentaremos um dos métodos que avalia fundações profundas, em especial estacas, tanto do ponto de vista da integridade do elemento estrutural
ENSAIOS DE CARREGAMENTO DINÂMICO RESUMO Neste breve artigo apresentaremos um dos métodos que avalia fundações profundas, em especial estacas, tanto do ponto de vista da integridade do elemento estrutural
RESISTÊNCIA DOS MATERIAIS CONTROLE DE QUALIDADE INDUSTRIAL RESISTÊNCIA À FLEXÃO RESISTÊNCIA À FLEXÃO. Claudemir Claudino Semestre
 CONTROLE DE QUALIDADE INDUSTRIAL Claudemir Claudino 2014 1 Semestre TIPOS DE APOIOS Introdução: Agora vamos estudar o dimensionamento de estruturas sujeitas a esforços de flexão, considerando-se para tal
CONTROLE DE QUALIDADE INDUSTRIAL Claudemir Claudino 2014 1 Semestre TIPOS DE APOIOS Introdução: Agora vamos estudar o dimensionamento de estruturas sujeitas a esforços de flexão, considerando-se para tal
FKB INDÚSTRIA DE EQUIPAMENTOS LTDA. COMPORTAS TIPO ADUFA DE PAREDE VCO-21
 Descrição Geral As Comportas tipo Adufa de Parede FKB (VCO-21) são fabricadas conforme norma AWWA C561 e tem como função o controle e/ou bloqueio na vazão de fluidos. São desenvolvidas para instalação
Descrição Geral As Comportas tipo Adufa de Parede FKB (VCO-21) são fabricadas conforme norma AWWA C561 e tem como função o controle e/ou bloqueio na vazão de fluidos. São desenvolvidas para instalação
ESTRUTURAS METÁLICAS E DE MADEIRAS PROF.: VICTOR MACHADO
 ESTRUTURAS METÁLICAS E DE MADEIRAS PROF.: VICTOR MACHADO UNIDADE II - ESTRUTURAS METÁLICAS VIGAS DE ALMA CHEIA INTRODUÇÃO No projeto no estado limite último de vigas sujeitas à flexão simples calculam-se,
ESTRUTURAS METÁLICAS E DE MADEIRAS PROF.: VICTOR MACHADO UNIDADE II - ESTRUTURAS METÁLICAS VIGAS DE ALMA CHEIA INTRODUÇÃO No projeto no estado limite último de vigas sujeitas à flexão simples calculam-se,
Mangotes REELINE. Catálogo 2012
 PT Mangotes REELINE Catálogo 2012 Grupo Trelleborg, líder em elastômeros Trelleborg é um grupo industrial global cujas posições de liderança se baseiam em avançada tecnologia de polímeros, e profundo
PT Mangotes REELINE Catálogo 2012 Grupo Trelleborg, líder em elastômeros Trelleborg é um grupo industrial global cujas posições de liderança se baseiam em avançada tecnologia de polímeros, e profundo
INFORMAÇÕES COMPLEMENTARES
 REVISÃO 01 SETEMBRO/2011 INFORMAÇÕES COMPLEMENTARES - TNC Informações operacionais do Terminal Aquaviário Norte Capixaba - Espírito Santo ELABORADO PELA Gerência de Comercialização de Serviços de Terminais
REVISÃO 01 SETEMBRO/2011 INFORMAÇÕES COMPLEMENTARES - TNC Informações operacionais do Terminal Aquaviário Norte Capixaba - Espírito Santo ELABORADO PELA Gerência de Comercialização de Serviços de Terminais
LISTA DE EXERCÍCIOS ÁREA 1. Disciplina: Mecânica dos Sólidos MECSOL34 Semestre: 2016/02
 LISTA DE EXERCÍCIOS ÁREA 1 Disciplina: Mecânica dos Sólidos MECSOL34 Semestre: 2016/02 Prof: Diego R. Alba 1. O macaco AB é usado para corrigir a viga defletida DE conforme a figura. Se a força compressiva
LISTA DE EXERCÍCIOS ÁREA 1 Disciplina: Mecânica dos Sólidos MECSOL34 Semestre: 2016/02 Prof: Diego R. Alba 1. O macaco AB é usado para corrigir a viga defletida DE conforme a figura. Se a força compressiva
ESTRUTURAS METÁLICAS LIGAÇÕES - APOIOS. Prof. Alexandre Augusto Pescador Sardá
 ESTRUTURAS METÁLICAS LIGAÇÕES - APOIOS Prof. Alexandre Augusto Pescador Sardá LIGAÇÕES Edificações Ligações entre vigas; Ligações entre viga e coluna; Emenda de colunas; Emenda de vigas; Apoio de colunas;
ESTRUTURAS METÁLICAS LIGAÇÕES - APOIOS Prof. Alexandre Augusto Pescador Sardá LIGAÇÕES Edificações Ligações entre vigas; Ligações entre viga e coluna; Emenda de colunas; Emenda de vigas; Apoio de colunas;
INFLUÊNCIA DO ESTADO DE MAR NO COEFICIENTE DE AMORTECIMENTO DO MOVIMENTO DE JOGO EM UM FPSO. Rafaella Cristina Almeida de Carvalho
 INFLUÊNCIA DO ESTADO DE MAR NO COEFICIENTE DE AMORTECIMENTO DO MOVIMENTO DE JOGO EM UM FPSO Rafaella Cristina Almeida de Carvalho Dissertação de mestrado apresentada ao Programa de Pós-graduação em Engenharia
INFLUÊNCIA DO ESTADO DE MAR NO COEFICIENTE DE AMORTECIMENTO DO MOVIMENTO DE JOGO EM UM FPSO Rafaella Cristina Almeida de Carvalho Dissertação de mestrado apresentada ao Programa de Pós-graduação em Engenharia
5 Resultados de Campo
 5 Resultados de Campo O modelo desenvolvido e testado no capítulo anterior foi utilizado para realizar a previsão de depósito de parafina em um poço produtor da Petrobras. Utilizando informações de geometria,
5 Resultados de Campo O modelo desenvolvido e testado no capítulo anterior foi utilizado para realizar a previsão de depósito de parafina em um poço produtor da Petrobras. Utilizando informações de geometria,
Saneamento Ambiental I
 Universidade Federal do Paraná Engenharia Ambiental Saneamento Ambiental I Aula 23 O Sistema de Esgoto Sanitário: dimensionamento Profª Heloise G. Knapik 1 EXERCÍCIO ESTIMATIVA DE VAZÕES E CARGA DE ESGOTO
Universidade Federal do Paraná Engenharia Ambiental Saneamento Ambiental I Aula 23 O Sistema de Esgoto Sanitário: dimensionamento Profª Heloise G. Knapik 1 EXERCÍCIO ESTIMATIVA DE VAZÕES E CARGA DE ESGOTO
LISTA DE EXERCÍCIOS MECÂNICA DOS SÓLIDOS I
 LISTA DE EXERCÍCIOS MECÂNICA DOS SÓLIDOS I A - Tensão Normal Média 1. Ex. 1.40. O bloco de concreto tem as dimensões mostradas na figura. Se o material falhar quando a tensão normal média atingir 0,840
LISTA DE EXERCÍCIOS MECÂNICA DOS SÓLIDOS I A - Tensão Normal Média 1. Ex. 1.40. O bloco de concreto tem as dimensões mostradas na figura. Se o material falhar quando a tensão normal média atingir 0,840
MORFOLOGIA DAS ESTRUTURAS
 I - ESTRUTURAS RESISTENTES MORFOLOGIA DAS ESTRUTURAS É um conjunto de elementos ligados entre si que tem a finalidade de suportar cargas e transferi-las ao solo. Os esforços externos ativos ou cargas que
I - ESTRUTURAS RESISTENTES MORFOLOGIA DAS ESTRUTURAS É um conjunto de elementos ligados entre si que tem a finalidade de suportar cargas e transferi-las ao solo. Os esforços externos ativos ou cargas que
São as vigas que são fabricadas com mais de um material.
 - UNIVERSIDADE FEDERAL FLUMINENSE ESCOLA DE ENGENHARIA INDUSTRIAL METALÚRGICA DE VOLTA REDONDA PROFESSORA: SALETE SOUZA DE OLIVEIRA BUFFONI DISCIPLINA: RESISTÊNCIA DOS MATERIAIS Tensões em Vigas Tópicos
- UNIVERSIDADE FEDERAL FLUMINENSE ESCOLA DE ENGENHARIA INDUSTRIAL METALÚRGICA DE VOLTA REDONDA PROFESSORA: SALETE SOUZA DE OLIVEIRA BUFFONI DISCIPLINA: RESISTÊNCIA DOS MATERIAIS Tensões em Vigas Tópicos
Carga axial. Princípio de Saint-Venant. Princípio de Saint-Venant
 Capítulo 4: Carga axial Adaptado pela prof. Dra. Danielle Bond Princípio de Saint-Venant Anteriormente desenvolvemos os conceitos de: Tensão (um meio para medir a distribuição de força no interior de um
Capítulo 4: Carga axial Adaptado pela prof. Dra. Danielle Bond Princípio de Saint-Venant Anteriormente desenvolvemos os conceitos de: Tensão (um meio para medir a distribuição de força no interior de um
Resumo Prova Final (P1)
") Resumo Prova Final (P1) Características da Engenharia Naval: Alto conteúdo tecnológico misturado com conhecimento tradicional; Caráter estratégico para o país; Longo período de produção; Interdisciplinar;
Resumo Prova Final (P1) Características da Engenharia Naval: Alto conteúdo tecnológico misturado com conhecimento tradicional; Caráter estratégico para o país; Longo período de produção; Interdisciplinar;
Mecânica dos Fluidos
 Mecânica dos Fluidos Perda de Carga no Escoamento em Tubos Prof. Universidade Federal do Pampa BA000200 Campus Bagé 10 e 17 de abril de 2017 Perda de Carga no Escoamento em Tubos 1 / 30 Introdução Perda
Mecânica dos Fluidos Perda de Carga no Escoamento em Tubos Prof. Universidade Federal do Pampa BA000200 Campus Bagé 10 e 17 de abril de 2017 Perda de Carga no Escoamento em Tubos 1 / 30 Introdução Perda
1 Introdução 1.1 Definição do Problema
 1 Introdução 1.1 Definição do Problema A engenharia de perfuração é uma das áreas na indústria que envolve o estudo da iteração entre a rocha e o cortador. Muitos estudos nesta área têm sido desenvolvidos
1 Introdução 1.1 Definição do Problema A engenharia de perfuração é uma das áreas na indústria que envolve o estudo da iteração entre a rocha e o cortador. Muitos estudos nesta área têm sido desenvolvidos
Acessório acoplado às extremidades da mangueira para conexão desta.
 1 ESPECIFICAÇÃO / SEMPLA/ COBES/ DGSS-3 CÓD.SUPRI: 51.105.001.001. 105.001.001.- ( ) CATMAT / BEC VER TABELA UN. MOVIMENTAÇÃO: UNIDADE MANGUEIRA DE INCÊNDIO ( 1 E 2) - ESPECIFICAÇÃO CONFORME NBR 11861/98
1 ESPECIFICAÇÃO / SEMPLA/ COBES/ DGSS-3 CÓD.SUPRI: 51.105.001.001. 105.001.001.- ( ) CATMAT / BEC VER TABELA UN. MOVIMENTAÇÃO: UNIDADE MANGUEIRA DE INCÊNDIO ( 1 E 2) - ESPECIFICAÇÃO CONFORME NBR 11861/98
Elementos de Engenharia Civil 2009/2010. Enunciados dos problemas *
 DEPARTAMENTO DE ENGENHARIA CIVIL E ARQUITECTURA SECÇÁO DE HIDRÁULICA E RECURSOS HÍDRICOS E AMBIENTAIS Elementos de Engenharia Civil 2009/2010 2 SEMESTRE Enunciados dos problemas * (módulo de Hidráulica)
DEPARTAMENTO DE ENGENHARIA CIVIL E ARQUITECTURA SECÇÁO DE HIDRÁULICA E RECURSOS HÍDRICOS E AMBIENTAIS Elementos de Engenharia Civil 2009/2010 2 SEMESTRE Enunciados dos problemas * (módulo de Hidráulica)
TÍTULO: DESENVOLVIMENTO DE UM KIT DIDÁTICO DE PERDA DE CARGA CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS
 TÍTULO: DESENVOLVIMENTO DE UM KIT DIDÁTICO DE PERDA DE CARGA CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE DE ENGENHARIA DE SOROCABA AUTOR(ES): RAPHAEL
TÍTULO: DESENVOLVIMENTO DE UM KIT DIDÁTICO DE PERDA DE CARGA CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE DE ENGENHARIA DE SOROCABA AUTOR(ES): RAPHAEL
Marinharia
 Marinharia www.douroazul.pt Embarcação Navio www.douroazul.pt Embarcação É uma construção flutuante com capacidade para transportar pessoas ou coisas ou efetuar operações específicas no meio aquático.
Marinharia www.douroazul.pt Embarcação Navio www.douroazul.pt Embarcação É uma construção flutuante com capacidade para transportar pessoas ou coisas ou efetuar operações específicas no meio aquático.
PARTE II REGRAS PARA CONSTRUÇÃO E CLASSIFICAÇÃO DE NAVIOS IDENTIFICADOS POR SUAS MISSÕES TÍTULO 43 DRAGAS E BATELÕES CAPÍTULOS ABORDAGEM
 PARTE II REGRAS PARA CONSTRUÇÃO E CLASSIFICAÇÃO DE NAVIOS IDENTIFICADOS POR SUAS MISSÕES TÍTULO 43 DRAGAS E BATELÕES SEÇÃO 2 ESTRUTURA CAPÍTULOS A ABORDAGEM B DOCUMENTOS, REGULAMENTAÇÃO E NORMAS C D E
PARTE II REGRAS PARA CONSTRUÇÃO E CLASSIFICAÇÃO DE NAVIOS IDENTIFICADOS POR SUAS MISSÕES TÍTULO 43 DRAGAS E BATELÕES SEÇÃO 2 ESTRUTURA CAPÍTULOS A ABORDAGEM B DOCUMENTOS, REGULAMENTAÇÃO E NORMAS C D E
5 Resultados Experimentais
 5 Resultados Experimentais 5.1. Introdução Neste capítulo são apresentados os resultados medidos dos dois testes experimentais em escala real realizados para a comparação dos resultados teóricos. 5.2.
5 Resultados Experimentais 5.1. Introdução Neste capítulo são apresentados os resultados medidos dos dois testes experimentais em escala real realizados para a comparação dos resultados teóricos. 5.2.
Capítulo 3: Propriedades mecânicas dos materiais
 Capítulo 3: Propriedades mecânicas dos materiais O ensaio de tração e compressão A resistência de um material depende de sua capacidade de suportar uma carga sem deformação excessiva ou ruptura. Essa propriedade
Capítulo 3: Propriedades mecânicas dos materiais O ensaio de tração e compressão A resistência de um material depende de sua capacidade de suportar uma carga sem deformação excessiva ou ruptura. Essa propriedade
Escoamentos em Superfícies Livres
 Escoamentos em Superfícies Livres Prof. Alexandre Silveira Universidade Federal de Alfenas Instituto de Ciência e Tecnologia Campus Avançado de Poços de Caldas-MG Curso Engenharia Ambiental e Urbana ICT
Escoamentos em Superfícies Livres Prof. Alexandre Silveira Universidade Federal de Alfenas Instituto de Ciência e Tecnologia Campus Avançado de Poços de Caldas-MG Curso Engenharia Ambiental e Urbana ICT
Caderno de Estruturas em Alvenaria e Concreto Simples
 Caderno de Estruturas em Alvenaria e Concreto Simples CONTEÚDO CAPÍTULO 1 - RESISTÊNCIA DO MATERIAL 1.1. Introdução 1.2. Definição: função e importância das argamassas 1.3. Classificação das alvenarias
Caderno de Estruturas em Alvenaria e Concreto Simples CONTEÚDO CAPÍTULO 1 - RESISTÊNCIA DO MATERIAL 1.1. Introdução 1.2. Definição: função e importância das argamassas 1.3. Classificação das alvenarias
parâmetros de cálculo 4. Velocidade 5. Vazão
 parâmetros de cálculo 4. Velocidade Velocidade é distância percorrida por unidade de tempo. A unidade usual é m/s. Uma maneira de entender a velocidade da água na tubulação é imaginar uma partícula de
parâmetros de cálculo 4. Velocidade Velocidade é distância percorrida por unidade de tempo. A unidade usual é m/s. Uma maneira de entender a velocidade da água na tubulação é imaginar uma partícula de
Capítulo 4 Propriedades Mecânicas dos Materiais
 Capítulo 4 Propriedades Mecânicas dos Materiais Resistência dos Materiais I SLIDES 04 Prof. MSc. Douglas M. A. Bittencourt prof.douglas.pucgo@gmail.com Propriedades Mecânicas dos Materiais 2 3 Propriedades
Capítulo 4 Propriedades Mecânicas dos Materiais Resistência dos Materiais I SLIDES 04 Prof. MSc. Douglas M. A. Bittencourt prof.douglas.pucgo@gmail.com Propriedades Mecânicas dos Materiais 2 3 Propriedades
RESUMO MECFLU P2. 1. EQUAÇÃO DE BERNOULLI Estudo das propriedades de um escoamento ao longo de uma linha de corrente.
 RESUMO MECFLU P2 1. EQUAÇÃO DE BERNOULLI Estudo das propriedades de um escoamento ao longo de uma linha de corrente. Hipóteses Fluido invíscido (viscosidade nula) não ocorre perda de energia. Fluido incompressível
RESUMO MECFLU P2 1. EQUAÇÃO DE BERNOULLI Estudo das propriedades de um escoamento ao longo de uma linha de corrente. Hipóteses Fluido invíscido (viscosidade nula) não ocorre perda de energia. Fluido incompressível
Professor: José Junio Lopes
 Lista de Exercício Aula 3 TENSÃO E DEFORMAÇÃO A - DEFORMAÇÃO NORMAL 1 - Ex 2.3. - A barra rígida é sustentada por um pino em A e pelos cabos BD e CE. Se a carga P aplicada à viga provocar um deslocamento
Lista de Exercício Aula 3 TENSÃO E DEFORMAÇÃO A - DEFORMAÇÃO NORMAL 1 - Ex 2.3. - A barra rígida é sustentada por um pino em A e pelos cabos BD e CE. Se a carga P aplicada à viga provocar um deslocamento
O centróide de área é definido como sendo o ponto correspondente ao centro de gravidade de uma placa de espessura infinitesimal.
 CENTRÓIDES E MOMENTO DE INÉRCIA Centróide O centróide de área é definido como sendo o ponto correspondente ao centro de gravidade de uma placa de espessura infinitesimal. De uma maneira bem simples: centróide
CENTRÓIDES E MOMENTO DE INÉRCIA Centróide O centróide de área é definido como sendo o ponto correspondente ao centro de gravidade de uma placa de espessura infinitesimal. De uma maneira bem simples: centróide
RESISTÊNCIA DOS MATERIAIS II - Notas de Aulas
 RESISTÊNCIA DOS MATERIAIS II - Notas de Aulas Prof. José Junio Lopes BIBLIOGRAFIA BÁSICA HIBBELER, Russell Charles. Resistência dos Materiais ed. São Paulo: Pearson Prentice Hall, 2009. 1 - CONCEITOS FUNDAMENTAIS
RESISTÊNCIA DOS MATERIAIS II - Notas de Aulas Prof. José Junio Lopes BIBLIOGRAFIA BÁSICA HIBBELER, Russell Charles. Resistência dos Materiais ed. São Paulo: Pearson Prentice Hall, 2009. 1 - CONCEITOS FUNDAMENTAIS
2 HIDROSTÁTICA PROBLEMA 2.1 RESOLUÇÃO
 2 HIDROSTÁTICA PROBLEMA 2.1 O tubo representado na figura está cheio de óleo de densidade 0,85. Determine as pressões nos pontos A e B e exprima-as em altura equivalente de água. Fundamentos de Engenharia
2 HIDROSTÁTICA PROBLEMA 2.1 O tubo representado na figura está cheio de óleo de densidade 0,85. Determine as pressões nos pontos A e B e exprima-as em altura equivalente de água. Fundamentos de Engenharia
2 Sistemas de Produção Offshore
 2 Sistemas de Produção Offshore 2.1. Introdução O conjunto de equipamentos utilizados para a prospecção e exploração marinha de petróleo é conhecido como Sistema Offshore e compreende basicamente quatro
2 Sistemas de Produção Offshore 2.1. Introdução O conjunto de equipamentos utilizados para a prospecção e exploração marinha de petróleo é conhecido como Sistema Offshore e compreende basicamente quatro
HIDRÁULICA GERAL PRÁTICA TEMA: CLASSIFICAÇÃO DOS REGIMES DE ESCOAMENTO
 HGP Prática 1 3/12/2012 1 HIDRÁULICA GERAL PRÁTICA 1. 1- TEMA: CLASSIFICAÇÃO DOS REGIMES DE ESCOAMENTO 2- OBJETIVOS: Estabelecimento de critérios para a classificação dos regimes de escoamento através
HGP Prática 1 3/12/2012 1 HIDRÁULICA GERAL PRÁTICA 1. 1- TEMA: CLASSIFICAÇÃO DOS REGIMES DE ESCOAMENTO 2- OBJETIVOS: Estabelecimento de critérios para a classificação dos regimes de escoamento através
2 Sistemas de produção offshore
 2 Sistemas de produção offshore Neste capítulo é descrita a sequência de análise utilizada na prática de projetos de risers, sistemas de ancoragem e unidades flutuantes usando modelos desacoplados com
2 Sistemas de produção offshore Neste capítulo é descrita a sequência de análise utilizada na prática de projetos de risers, sistemas de ancoragem e unidades flutuantes usando modelos desacoplados com
Circuito Hidráulico Básico:
 Circuito Hidráulico ásico: O circuito hidráulico mais simples consiste no comando de avanço e recuo de um cilindro de dupla ação, utilizando uma bomba de vazão constante e uma válvula direcional de acionamento
Circuito Hidráulico ásico: O circuito hidráulico mais simples consiste no comando de avanço e recuo de um cilindro de dupla ação, utilizando uma bomba de vazão constante e uma válvula direcional de acionamento
MÁQUINAS DE ELEVAÇÃO E TRANSPORTE AULA 4 E 5 POLIAS E TAMBORES
 MÁQUINAS DE ELEVAÇÃO E TRANSPORTE AULA 4 E 5 POLIAS E TAMBORES PROF.: KAIO DUTRA Polias As polias podem ser fabricadas nos dois tipos: Móveis: Movimentam-se com o movimento da carga, normalmente usada
MÁQUINAS DE ELEVAÇÃO E TRANSPORTE AULA 4 E 5 POLIAS E TAMBORES PROF.: KAIO DUTRA Polias As polias podem ser fabricadas nos dois tipos: Móveis: Movimentam-se com o movimento da carga, normalmente usada
PROGRAD / COSEAC Padrão de Respostas Física Grupos 05 e 20
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
HIDRODINÂMICA CONDUTOS SOB PRESSÃO
 HIDRODINÂMICA CONDUTOS SOB PRESSÃO CONDUTOS SOB PRESSÃO Denominam-se condutos sob pressão ou condutos forçados, as canalizações onde o líquido escoa sob uma pressão diferente da atmosférica. As seções
HIDRODINÂMICA CONDUTOS SOB PRESSÃO CONDUTOS SOB PRESSÃO Denominam-se condutos sob pressão ou condutos forçados, as canalizações onde o líquido escoa sob uma pressão diferente da atmosférica. As seções
PME-2350 MECÂNICA DOS SÓLIDOS II AULA #7: VASOS DE PRESSÃO DE PAREDE ESPESSA 1
 PME-2350 MECÂNICA DOS SÓLIDOS II AULA #7: VASOS DE PRESSÃO DE PAREDE ESPESSA 1 7.1. Introdução e hipóteses gerais Vimos na aula anterior as equações necessárias para a solução de um problema geral da Teoria
PME-2350 MECÂNICA DOS SÓLIDOS II AULA #7: VASOS DE PRESSÃO DE PAREDE ESPESSA 1 7.1. Introdução e hipóteses gerais Vimos na aula anterior as equações necessárias para a solução de um problema geral da Teoria
Propriedades Geométricas de um seção Plana e Propriedades Mecânicas dos Materiais
 MKT-MDL-05 Versão 00 Propriedades Geométricas de um seção Plana e Propriedades Mecânicas dos Materiais Curso: Bacharelado em Engenharia Civil Turma: 5º Docente: Carla Soraia da Silva Pereira MKT-MDL-05
MKT-MDL-05 Versão 00 Propriedades Geométricas de um seção Plana e Propriedades Mecânicas dos Materiais Curso: Bacharelado em Engenharia Civil Turma: 5º Docente: Carla Soraia da Silva Pereira MKT-MDL-05
ANÁLISE DO COMPORTAMENTO DE MANCAIS ELASTO-HIDRODINÂMICOS ATRAVÉS DO MÉTODO DOS ELEMENTOS FINITOS
 ANÁLISE DO COMPORTAMENTO DE MANCAIS ELASTO-HIDRODINÂMICOS ATRAVÉS DO MÉTODO DOS ELEMENTOS FINITOS Bruno Luchini, Fábio Fernandes Valente e Mariano Eduardo Moreno UFSCar, Universidade Federal de São Carlos,
ANÁLISE DO COMPORTAMENTO DE MANCAIS ELASTO-HIDRODINÂMICOS ATRAVÉS DO MÉTODO DOS ELEMENTOS FINITOS Bruno Luchini, Fábio Fernandes Valente e Mariano Eduardo Moreno UFSCar, Universidade Federal de São Carlos,
Lista de Exercício 3 Elastoplasticidade e Análise Liimite 18/05/2017. A flexão na barra BC ocorre no plano de maior inércia da seção transversal.
 Exercício 1 Para o sistema estrutural da figura 1a, para o qual os diagramas de momento fletor em AB e força normal em BC da solução elástica são indicados na figura 1b, estudar pelo método passo-a-passo
Exercício 1 Para o sistema estrutural da figura 1a, para o qual os diagramas de momento fletor em AB e força normal em BC da solução elástica são indicados na figura 1b, estudar pelo método passo-a-passo
SEM534 Processos de Fabricação Mecânica. Professor - Renato G. Jasinevicius. Aula: Máquina ferramenta- Torno. Torno
 SEM534 Processos de Fabricação Mecânica Professor - Renato G. Jasinevicius Aula: Máquina ferramenta- Torno Torno Torno Existe uma grande variedade de tornos que diferem entre si pelas dimensões, características,
SEM534 Processos de Fabricação Mecânica Professor - Renato G. Jasinevicius Aula: Máquina ferramenta- Torno Torno Torno Existe uma grande variedade de tornos que diferem entre si pelas dimensões, características,
3. Descrição dos Testes Experimentais
 36 3. Descrição dos Testes Experimentais Neste capítulo serão descritos todos os testes experimentais realizados. 3.1. Considerações Iniciais O sistema estrutural construído consiste em uma laje mista
36 3. Descrição dos Testes Experimentais Neste capítulo serão descritos todos os testes experimentais realizados. 3.1. Considerações Iniciais O sistema estrutural construído consiste em uma laje mista
PROCESSO DE INGRESSO NA UPE
 PROCESSO DE INGRESSO NA UPE FÍSICA 2º dia 1 FÍSICA VESTIBULAR Nas questões com respostas numéricas, considere π = 3,00 e o módulo da aceleração da gravidade como g = 10,0 m/s 2 1. Um tanque de uma refinaria
PROCESSO DE INGRESSO NA UPE FÍSICA 2º dia 1 FÍSICA VESTIBULAR Nas questões com respostas numéricas, considere π = 3,00 e o módulo da aceleração da gravidade como g = 10,0 m/s 2 1. Um tanque de uma refinaria
HIDROLOGIA AULA semestre - Engenharia Civil. MEDIÇÃO DE VAZÃO Profª. Priscila Pini
 HIDROLOGIA AULA 13 5 semestre - Engenharia Civil MEDIÇÃO DE VAZÃO Profª. Priscila Pini prof.priscila@feitep.edu.br INTRODUÇÃO Vazão: volume de água que passa por uma determinada seção de um rio ao longo
HIDROLOGIA AULA 13 5 semestre - Engenharia Civil MEDIÇÃO DE VAZÃO Profª. Priscila Pini prof.priscila@feitep.edu.br INTRODUÇÃO Vazão: volume de água que passa por uma determinada seção de um rio ao longo
FÍSICA. O kwh é unidade usual da medida de consumo de energia elétrica, um múltiplo do joule, que é a unidade do Sistema Internacional.
 1 d FÍSICA O kwh é unidade usual da medida de consumo de energia elétrica, um múltiplo do joule, que é a unidade do Sistema Internacional. O fator que relaciona estas unidades é a) 1 x 10 3 b) 3,6 x 10
1 d FÍSICA O kwh é unidade usual da medida de consumo de energia elétrica, um múltiplo do joule, que é a unidade do Sistema Internacional. O fator que relaciona estas unidades é a) 1 x 10 3 b) 3,6 x 10
1. Introdução. 300 m, entre 300 e 1000 m, e acima de 1000 m.
 12 1. Introdução A indústria petrolífera brasileira, desde as últimas décadas, tem sido um dos referenciais mundiais nas atividades de exploração e produção de petróleo. Com o objetivo de tornar-se auto-suficiente,
12 1. Introdução A indústria petrolífera brasileira, desde as últimas décadas, tem sido um dos referenciais mundiais nas atividades de exploração e produção de petróleo. Com o objetivo de tornar-se auto-suficiente,
3. MATERIAIS E MÉTODOS
 53 3. MATERIAIS E MÉTODOS Para o estudo do comportamento mecânico de vigas compostas e suas ligações se faz necessária, além da análise teórica, a realização de ensaios de laboratório para aferir os modelos
53 3. MATERIAIS E MÉTODOS Para o estudo do comportamento mecânico de vigas compostas e suas ligações se faz necessária, além da análise teórica, a realização de ensaios de laboratório para aferir os modelos
Aula 2 - Tensão Normal e de Cisalhamento.
 Aula 2 - Tensão Normal e de Cisalhamento. A - TENSÃO NORMAL MÉDIA 1. Exemplo 1.17 - A luminária de 80 kg é sustentada por duas hastes, AB e BC, como mostra a figura 1.17a. Se AB tiver diâmetro de 10 mm
Aula 2 - Tensão Normal e de Cisalhamento. A - TENSÃO NORMAL MÉDIA 1. Exemplo 1.17 - A luminária de 80 kg é sustentada por duas hastes, AB e BC, como mostra a figura 1.17a. Se AB tiver diâmetro de 10 mm
Características Geométricas de Figuras Planas PROF. ESP. DIEGO FERREIRA
 Características Geométricas de Figuras Planas PROF. ESP. DIEGO FERREIRA A Figura abaixo ilustra uma barra reta de seção transversal constante, chamada barra prismática. O lado da barra que contém o comprimento
Características Geométricas de Figuras Planas PROF. ESP. DIEGO FERREIRA A Figura abaixo ilustra uma barra reta de seção transversal constante, chamada barra prismática. O lado da barra que contém o comprimento
LISTA UERJ - EMPUXO. A razão. entre as intensidades das forças, quando o sistema está em equilíbrio, corresponde a: a) 12 b) 6 c) 3 d) 2
 12 b) 6 c) 3 d) 2") LISTA UERJ - EMPUXO 1. (Uerj 2013) Observe, na figura a seguir, a representação de uma prensa hidráulica, na qual as forças F 1 e F 2 atuam, respectivamente, sobre os êmbolos dos cilindros I e II. Admita
LISTA UERJ - EMPUXO 1. (Uerj 2013) Observe, na figura a seguir, a representação de uma prensa hidráulica, na qual as forças F 1 e F 2 atuam, respectivamente, sobre os êmbolos dos cilindros I e II. Admita
Curso de Dimensionamento de Pilares Mistos EAD - CBCA. Módulo
 Curso de Dimensionamento de Pilares Mistos EAD - CBCA Módulo 4 Sumário Módulo 4 Dimensionamento de Pilares Mistos 4.1. Considerações Gerais página 3 4.2. Critérios de dimensionamento página 3 4.3. Dimensionamento
Curso de Dimensionamento de Pilares Mistos EAD - CBCA Módulo 4 Sumário Módulo 4 Dimensionamento de Pilares Mistos 4.1. Considerações Gerais página 3 4.2. Critérios de dimensionamento página 3 4.3. Dimensionamento
FÍSICA - A ª SÉRIE P02-2º. Trimestre
 LISTA DE EXERCÍCIOS COMPLEMENTARES FÍSICA - A - 2011 2ª SÉRIE P02-2º. Trimestre ALUNO: Assunto(s): Unidade 04 Pressão e Unidade 05 Teorema de Arquimedes. Exercícios do Livro para Estudar - Página 30 números
LISTA DE EXERCÍCIOS COMPLEMENTARES FÍSICA - A - 2011 2ª SÉRIE P02-2º. Trimestre ALUNO: Assunto(s): Unidade 04 Pressão e Unidade 05 Teorema de Arquimedes. Exercícios do Livro para Estudar - Página 30 números
ESTUDO NUMÉRICO-EXPERIMENTAL DA INSTALAÇÃO DO TANQUE DE FLUTUAÇÃO DE UM RISER AUTO-SUSTENTÁVEL UTILIZANDO A PLATAFORMA P23. Aluizio de Amorim Pacheco
 ESTUDO NUMÉRICO-EXPERIMENTAL DA INSTALAÇÃO DO TANQUE DE FLUTUAÇÃO DE UM RISER AUTO-SUSTENTÁVEL UTILIZANDO A PLATAFORMA P23 Aluizio de Amorim Pacheco Tese de Doutorado apresentada ao Programa de Pós-graduação
ESTUDO NUMÉRICO-EXPERIMENTAL DA INSTALAÇÃO DO TANQUE DE FLUTUAÇÃO DE UM RISER AUTO-SUSTENTÁVEL UTILIZANDO A PLATAFORMA P23 Aluizio de Amorim Pacheco Tese de Doutorado apresentada ao Programa de Pós-graduação