PME 2600 MODELAGEM, ANÁLISE DINÂMICA E CONTROLE EM UM VEÍCULO ARTICULADO VISANDO PREVENIR O EFEITO CANIVETE.
|
|
|
- Matilde Ramires Bardini
- 6 Há anos
- Visualizações:
Transcrição
1 MODELAGEM, ANÁLISE DINÂMICA E CONTROLE EM UM VEÍCULO ARTICULADO VISANDO PREVENIR O EFEITO CANIVETE. PME 2600 PROFESSOR ORIENTADOR: DR. ROBERTO SPINOLA BARBOSA
; EUA 2001-2003: 9% acidentes com 2+ veículos (Starnes, 2006) EUA")
")
2 Introdução 2 ANTT: caminhões (2012); EUA : 9% acidentes com 2+ veículos (Starnes, 2006) EUA 2003: 3,1% acidentes com carretas (Martinez, 2005) Fonte: EUA 2003: 7,1% acidentes com fatalidades (Martinez, 2005) Segurança/Acidentes catastróficos; Dinâmica Lateral e estabilidade. Fonte:


3 Objetivos / Roteiro 3 Introdução; Modelagem Não Linear; Equações de Movimento; Estratégias de controle; Linearização do modelo; Estabilidade; Controle Clássico e Respostas; Implementação do controle e simulação em modelo não linear; Considerações Finais. Fonte:
4 4 Modelagem não linear: Dinâmica de guinada, lateral, vertical e arfagem Dinâmica de Guinada, longitudinal e lateral 6 graus de liberdade 2 restringidos (Pino rei) Dinâmica vertical e arfagem: 7 graus de liberdade 1 G.L. restringido (Pino rei)


5 Modelagem não linear: Pneus 5 Pacejka Magic Fórmula Dugoff Modelo tangente hiperbólica Bian
: 0,893 a 1.698 da carga estática N1, N2 e N3 = função (acelerações, geometria, inércia) Rigidez lateral e Long.")
6 Dinâmica das rodas 6 Dinâmica das rodas: 1 grau de liberdade por roda/pneu (x6) Força de contato Torque motor Torque de freio Transferência de carga(load Transfer) M.Pinxteren (2010): 0,893 a da carga estática N1, N2 e N3 = função (acelerações, geometria, inércia) Rigidez lateral e Long. = função (N1, N2, N3) Fonte: (Luijten, 2010)
7 Equações de dinâmica 7



8 Estratégias de controle 8 Controle por esterçamento ativo Controle ativo ou passivo no sistema pino rei e quinta roda: Fonte: Mercedes Fonte: BMW


9 Estratégias de controle 9 Controle por torque ativo ou Programa eletrônico de estabilidade: Torque motor e/ou freio controlado em cada roda Fonte: FORD
10 Linearização do modelo (para Controle) 10 Modelo 2-D; Força lateral do pneu Linear; Pino Rei infinitamente rígido; Propriedades de inércia constante; Atrito de rolagem e torque equilibrados. Entrada de controle no semirreboque: Freio diferencial
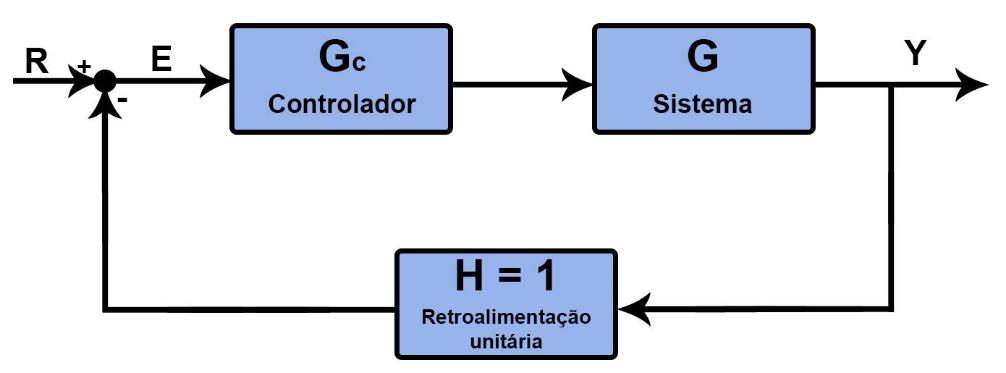

11 Estabilidade e Sistema de controle 11
12 Metodologias de controle: Técnica 1 de 3: Alocação de polos 12 Alocação de polos: Problema da limitação da banda do atuador

13 Metodologias de controle: Técnica 2 de 3: PID TUNER 13 PID Tuner: Ferramenta gráfica do MATLAB

14 Metodologias de controle: Técnica 3 de 3: Lugar das raízes (Root locus) 14 Root Locus: Visualização de todos possíveis polos para os diferentes ganhos de controle.
15 Respostas dinâmicas: Sistemas de controle 15 Impulso Degrau
 (BOUTELDJA; CEREZO,")
16 Critério ativação sistema de controle 16 Sistema controlado: Mais estável para manobras agressivas Menor dirigibilidade em manobras brandas Necessidade de critério para ativação Ω = Reta de extrapolação t = TLBA = Time Left Before Accident +-Threshold = Limiar Risk criterion prediction (TLBA) (BOUTELDJA; CEREZO, 2011)
17 17 Sistema não linear com controle: Manobra 1
18 18 Sistema não linear com controle: Manobra 2
19 19 Considerações Finais Efeito Canivete: Segurança/Acidentes catastróficos - Dinâmica Lateral e estabilidade. Modelagem não linear: Sistema com 19-3 Graus de Liberdade: Dinâmica de guinada, Lateral, vertical, arfagem e das rodas Modelagem do contato Pneu-Solo: Transferência de carga (Load transfer) e Estabilidade numérica Estratégias de controle: Esterçamento ativo, controle do acoplamento pino-rei e freio diferencial. Linearização do modelo: 4 Variáveis de estado Metodologias de controle: Alocação de polos, PID Tuner, Lugar das raízes Simulação do Controle(Lugar das raízes) no modelo não linear. Sistema de detecção e ativação do controle Tecnica implementada com sucesso Dúvidas/Sugestões?
20 Fim 20
Desenvolver um sistema de controle que visa reduzir o risco do efeito canivete. Desenvolver critério analítico para ativação do sistema de controle.
 Introdução Um tema de grande relevância quando se trata de veículos articulados é o efeito canivete (jackknife do inglês). Este tema já é assunto de diversos estudos, artigos e dissertações que tratam
Introdução Um tema de grande relevância quando se trata de veículos articulados é o efeito canivete (jackknife do inglês). Este tema já é assunto de diversos estudos, artigos e dissertações que tratam
Fundamentos de Dinâmica Veicular. Suspensões
 Fundamentos de Dinâmica Veicular Suspensões Glossário de termos técnicos http://bestcars.uol.com.br/glo/glo.htm A suspensão explicada http://bestcars.uol.com.br/tecprep/susp-1.htm Understanding a Suspension
Fundamentos de Dinâmica Veicular Suspensões Glossário de termos técnicos http://bestcars.uol.com.br/glo/glo.htm A suspensão explicada http://bestcars.uol.com.br/tecprep/susp-1.htm Understanding a Suspension
PROJETO DE UMA SUSPENSÃO VEICULAR COM CONTROLE DE CAMBAGEM E AMORTECIMENTO.
 PROJETO DE UMA SUSPENSÃO VEICULAR COM CONTROLE DE CAMBAGEM E AMORTECIMENTO. Renan Destéfani Monteiro renand.monteiro@hotmail.com Orientador: Prof. Dr. Marcelo Augusto Leal Alves malalves@usp.br Resumo:
PROJETO DE UMA SUSPENSÃO VEICULAR COM CONTROLE DE CAMBAGEM E AMORTECIMENTO. Renan Destéfani Monteiro renand.monteiro@hotmail.com Orientador: Prof. Dr. Marcelo Augusto Leal Alves malalves@usp.br Resumo:
3 Veículos Terrestres
 3 Veículos Terrestres Por se tratar de uma das primeiras dissertações do Programa de metrologia com aplicação à área veicular, optou-se pela inclusão neste capítulo de conceitos básicos que serão utilizados
3 Veículos Terrestres Por se tratar de uma das primeiras dissertações do Programa de metrologia com aplicação à área veicular, optou-se pela inclusão neste capítulo de conceitos básicos que serão utilizados
4 Modelo Linear de Quatro Graus de Liberdade
 4 Modelo Linear de Quatro Graus de Liberdade O modelo linear descrito em (Spinola, 2003) na forma de estado (11) representa um veículo de dois graus de liberdade: velocidade lateral em relação ao referencial
4 Modelo Linear de Quatro Graus de Liberdade O modelo linear descrito em (Spinola, 2003) na forma de estado (11) representa um veículo de dois graus de liberdade: velocidade lateral em relação ao referencial
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS
 DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluna: Ingrid Moura Obeid Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluna: Ingrid Moura Obeid Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II
 Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
2 Revisão Bibliográfica
 Revisão Bibliográfica 32 2 Revisão Bibliográfica A fim de melhor orientar e posicionar o trabalho, este capítulo é dividido em seções, cujos títulos remetem ao tipo de referência consultada. 2.1. Referências
Revisão Bibliográfica 32 2 Revisão Bibliográfica A fim de melhor orientar e posicionar o trabalho, este capítulo é dividido em seções, cujos títulos remetem ao tipo de referência consultada. 2.1. Referências
Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID)
 Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID)") Sistemas Realimentados Regulação e Tipo de sistema: Entrada de referência Entrada de distúrbio Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID) Fernando
Sistemas Realimentados Regulação e Tipo de sistema: Entrada de referência Entrada de distúrbio Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID) Fernando
Introdução à Engenharia da Motocicleta
 Depto de Engenharia Mecânica da UFPE Introdução à Engenharia da Motocicleta Fábio Magnani e Ramiro Willmersdorf 2010 Parte 2: Ciclística Aula 01 Programa Movimento em linha reta; Movimento em curva; Equilíbrio
Depto de Engenharia Mecânica da UFPE Introdução à Engenharia da Motocicleta Fábio Magnani e Ramiro Willmersdorf 2010 Parte 2: Ciclística Aula 01 Programa Movimento em linha reta; Movimento em curva; Equilíbrio
COE879 Técnicas Avançadas de Controle em Sistemas de Potência
 COE879 Técnicas Avançadas de Controle em Sistemas de Potência Glauco Nery Taranto tarang@coep.ufrj.br Resumo da Disciplina Representação no Espaço-Estado Variáveis de estado Matriz de transição Autovalor,
COE879 Técnicas Avançadas de Controle em Sistemas de Potência Glauco Nery Taranto tarang@coep.ufrj.br Resumo da Disciplina Representação no Espaço-Estado Variáveis de estado Matriz de transição Autovalor,
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL
 DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018
 COTAÇÕES TESTE N0.2 Q3-3.1 [3v], 3.2 [2v], 3.3 [2v], 3.4 [1v] Q4-4.1 [6v], 4.2 [2v], 4.3 [3v], 4.4 [1v] EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018 8 valores 12 valores EXAME Q1-1.1 [1v],
COTAÇÕES TESTE N0.2 Q3-3.1 [3v], 3.2 [2v], 3.3 [2v], 3.4 [1v] Q4-4.1 [6v], 4.2 [2v], 4.3 [3v], 4.4 [1v] EXAME No.1 ; TESTE No.2 CONTROLO-MEEC PROVAS-TIPO, Jan. 2018 8 valores 12 valores EXAME Q1-1.1 [1v],
Modelagem Matemática de Elementos Empregados em Suspensões Veiculares
 Trabalho apresentado no CMAC-Sul, Curitiba-PR, 214. Modelagem Matemática de Elementos Empregados em Suspensões Veiculares Ana P. Brezolin, Márcia F. Brondani, Marnei D. Zorzella, Mauri J. Klein, Rodrigo
Trabalho apresentado no CMAC-Sul, Curitiba-PR, 214. Modelagem Matemática de Elementos Empregados em Suspensões Veiculares Ana P. Brezolin, Márcia F. Brondani, Marnei D. Zorzella, Mauri J. Klein, Rodrigo
Introdução ao Projeto de Aeronaves. Aula 26 Estabilidade Latero-Direcional Dinâmica
 Introdução ao Projeto de Aeronaves Aula 26 Estabilidade Latero-Direcional Dinâmica Tópicos Abordados Estabilidade Lateral Dinâmica. Estabilidade Direcional Dinâmica. Modos de Estabilidade Dinâmica. Fundamentos
Introdução ao Projeto de Aeronaves Aula 26 Estabilidade Latero-Direcional Dinâmica Tópicos Abordados Estabilidade Lateral Dinâmica. Estabilidade Direcional Dinâmica. Modos de Estabilidade Dinâmica. Fundamentos
MODELAGEM DE SISTEMA DE SUSPENSÃO E VEÍCULO BAJA SAE COM SOFTWARE DE DINÂMICA MULTICORPOS
 MODELAGEM DE SISTEMA DE SUSPENSÃO E VEÍCULO BAJA SAE COM SOFTWARE DE DINÂMICA MULTICORPOS Paulo Hideki Yamagata Universidade de São Paulo Escola Politécnica paulo.yamagata@usp.br Prof. Dr. Roberto Spinola
MODELAGEM DE SISTEMA DE SUSPENSÃO E VEÍCULO BAJA SAE COM SOFTWARE DE DINÂMICA MULTICORPOS Paulo Hideki Yamagata Universidade de São Paulo Escola Politécnica paulo.yamagata@usp.br Prof. Dr. Roberto Spinola
SIMULAÇÃO E OTIMIZAÇÃO COMPUTACIONAL DE VEÍCULOS ARTICULADOS
 SIMULAÇÃO E OTIMIZAÇÃO COMPUTACIONAL DE VEÍCULOS ARTICULADOS José Antônio Ferreira Borges Valder Steffen Júnior Universidade Federal de Uberlândia, Faculdade de Engenharia Mecânica, Campus Santa Mônica,
SIMULAÇÃO E OTIMIZAÇÃO COMPUTACIONAL DE VEÍCULOS ARTICULADOS José Antônio Ferreira Borges Valder Steffen Júnior Universidade Federal de Uberlândia, Faculdade de Engenharia Mecânica, Campus Santa Mônica,
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL
 DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS
 DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluno: Johannes Ney Moser Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluno: Johannes Ney Moser Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
Nesta aula. Fundamentos de Dinâmica Veicular Aula 02 Características dos Pneus
 Fundamentos de Dinâmica Veicular Aula 02 Características dos Pneus Realização: Parceria: Nesta aula Construção Designação Mecanismo da geração de força Propriedades trativas Fórmula de Pacejka Construção
Fundamentos de Dinâmica Veicular Aula 02 Características dos Pneus Realização: Parceria: Nesta aula Construção Designação Mecanismo da geração de força Propriedades trativas Fórmula de Pacejka Construção
Aluno Data Curso / Turma Professor
 Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
Mario Campos, Dr.ECP PETROBRÁS/CENPES. Engenharia Básica em Automação e Otimização de Processos (EB/AOT)
") Controle Regulatório Avançado e Sintonia de Controladores PID Mario Campos, Dr.ECP PETROBRÁS/CENPES Engenharia Básica em Automação e Otimização de Processos (EB/AOT) e-mail: mariocampos@petrobras petrobras.com..com.br
Controle Regulatório Avançado e Sintonia de Controladores PID Mario Campos, Dr.ECP PETROBRÁS/CENPES Engenharia Básica em Automação e Otimização de Processos (EB/AOT) e-mail: mariocampos@petrobras petrobras.com..com.br
Projeto de pesquisa realizado no curso de Engenharia Elétrica da Unijuí, junto ao GAIC (Grupo de Automação Industrial e Controle) 2
 2") MODELAGEM MATEMÁTICA DE PLATAFORMA EXPERIMENTAL PARA SIMULAÇÃO DE AERONAVE MULTIRROTORA 1 MATHEMATICAL MODELLING OF EXPERIMENTAL PLATFORM FOR SIMULATION OF MULTIROTOR AIRCRAFT Christopher Sauer 2, Manuel
MODELAGEM MATEMÁTICA DE PLATAFORMA EXPERIMENTAL PARA SIMULAÇÃO DE AERONAVE MULTIRROTORA 1 MATHEMATICAL MODELLING OF EXPERIMENTAL PLATFORM FOR SIMULATION OF MULTIROTOR AIRCRAFT Christopher Sauer 2, Manuel
CONTROLE DE ÂNGULO DE AZIMUTE DE ANTENA DE RASTREAMENTO
 UFRJ Escola Politécnica Eng. Eletrônica e de Computação EEL660 Controle Linear 1 Avaliação Complementar 2017-1 CONTROLE DE ÂNGULO DE AZIMUTE DE ANTENA DE RASTREAMENTO Neste trabalho você deverá modelar,
UFRJ Escola Politécnica Eng. Eletrônica e de Computação EEL660 Controle Linear 1 Avaliação Complementar 2017-1 CONTROLE DE ÂNGULO DE AZIMUTE DE ANTENA DE RASTREAMENTO Neste trabalho você deverá modelar,
Vibrações Mecânicas. Sistemas com 2 Graus de Liberdade DEMEC/CTG/UFPE. Ramiro Brito Willmersdorf
 Vibrações Mecânicas Sistemas com 2 Graus de Liberdade DEMEC/CTG/UFPE Ramiro Brito Willmersdorf 2015.1 Introdução Sistemas que requerem 2 coordenadas generalizadas para especificar unicamente sua configuração;
Vibrações Mecânicas Sistemas com 2 Graus de Liberdade DEMEC/CTG/UFPE Ramiro Brito Willmersdorf 2015.1 Introdução Sistemas que requerem 2 coordenadas generalizadas para especificar unicamente sua configuração;
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
5 Realimentação do Ângulo de Yaw
 5 Realimentação do Ângulo de Yaw Neste item passa a ser considerado o ângulo de yaw do veículo como uma variável de entrada na malha de controle. Obtendo esse ângulo do modelo linear pode-se compará-lo
5 Realimentação do Ângulo de Yaw Neste item passa a ser considerado o ângulo de yaw do veículo como uma variável de entrada na malha de controle. Obtendo esse ângulo do modelo linear pode-se compará-lo
CONTEÚDOS PROGRAMADOS (Acústica Ambiental - EEK603) TOTAL 45
 TOTAL 45") (Acústica Ambiental - EEK603) TOTAL 4 (Acústica Básica - EEK4) - introdução O fenômeno acústico: propagação. Nível de pressão sonora. As hipóteses acústicas. - Equacionamento Balanços de massa e quantidade
(Acústica Ambiental - EEK603) TOTAL 4 (Acústica Básica - EEK4) - introdução O fenômeno acústico: propagação. Nível de pressão sonora. As hipóteses acústicas. - Equacionamento Balanços de massa e quantidade
5 ANÁLISES CINEMÁTICA e DINÂMICA
 5 ANÁLISES CINEMÁTICA e DINÂMICA Todo projeto de suspensão tem dois objetivos principais: dar conforto aos passageiros e estabilidade ao carro. O conforto é garantido isolando os passageiros das irregularidades
5 ANÁLISES CINEMÁTICA e DINÂMICA Todo projeto de suspensão tem dois objetivos principais: dar conforto aos passageiros e estabilidade ao carro. O conforto é garantido isolando os passageiros das irregularidades
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS
 DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluna: Ingrid Moura Obeid Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluna: Ingrid Moura Obeid Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
Fundamentos de Dinâmica Veicular. Sistemas de Direção
 Fundamentos de Dinâmica Veicular Sistemas de Direção Sistemas de direção Cinemática do esterçamento Erro de geometria Forças e momentos Nesta aula Esterçamento nas quatro rodas Front wheel drive, steering
Fundamentos de Dinâmica Veicular Sistemas de Direção Sistemas de direção Cinemática do esterçamento Erro de geometria Forças e momentos Nesta aula Esterçamento nas quatro rodas Front wheel drive, steering
5 Simulando a Dinâmica Veicular
 5 Simulando a Dinâmica Veicular Com base no trabalho de modelagem apresentada no capítulo 4, foram construídos os modelos computacionais, em ambiente Matlab/Simulink, que representam os diversos sistemas
5 Simulando a Dinâmica Veicular Com base no trabalho de modelagem apresentada no capítulo 4, foram construídos os modelos computacionais, em ambiente Matlab/Simulink, que representam os diversos sistemas
CARACTERÍTICAS TÉCNICAS
 LINHA DE EIXOS CARACTERÍTICAS TÉCNICAS APLICAÇÃO: TRANSPORTE DE CARGAS INDIVISÍVEIS E EXCEDENTES; ACOPLAMENTO : O VEÍCULO TRATOR DEVERÁ POSSUIR A CAPACIDADE MÁXIMA DE TRAÇÃO - (CMT), IGUAL OU SUPERIOR
LINHA DE EIXOS CARACTERÍTICAS TÉCNICAS APLICAÇÃO: TRANSPORTE DE CARGAS INDIVISÍVEIS E EXCEDENTES; ACOPLAMENTO : O VEÍCULO TRATOR DEVERÁ POSSUIR A CAPACIDADE MÁXIMA DE TRAÇÃO - (CMT), IGUAL OU SUPERIOR
6 Controlador de Estado
 6 Controlador de Estado Apresenta-se a seguir o método para implementação do sistema de controle por estados (Ogata, 1990). Considera-se agora o sistema representado em sua forma de estado: (25) cujo o
6 Controlador de Estado Apresenta-se a seguir o método para implementação do sistema de controle por estados (Ogata, 1990). Considera-se agora o sistema representado em sua forma de estado: (25) cujo o
SISTEMAS DE TRANSPORTES TT046
 UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE TRANSPORTES SISTEMAS DE TRANSPORTES TT046 Prof. Diego Fernandes Neris diego.neris@ufpr.br UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE TRANSPORTES Mecânica
UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE TRANSPORTES SISTEMAS DE TRANSPORTES TT046 Prof. Diego Fernandes Neris diego.neris@ufpr.br UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE TRANSPORTES Mecânica
EDITAL SEI DIRFEMEC Nº 5/2018
 UNIVERSIDADE FEDERAL DE UBERLÂNDIA Diretoria da Faculdade de Engenharia Mecânica Av. João Naves de Ávila, nº 2121, Bloco 1M - Bairro Santa Mônica, Uberlândia-MG, CEP 38400-902 Telefone: (34) 3239-4147
UNIVERSIDADE FEDERAL DE UBERLÂNDIA Diretoria da Faculdade de Engenharia Mecânica Av. João Naves de Ávila, nº 2121, Bloco 1M - Bairro Santa Mônica, Uberlândia-MG, CEP 38400-902 Telefone: (34) 3239-4147
FUSIPA. Quinta-roda 2. Manual do Usuário. Segurança. Montagem. Operação. Manutenção
 Quinta-roda Manual do Usuário Segurança Montagem Operação Manutenção Índice Página Quinta-roda Aplicação e Dimensionamento. Aplicação. Dimensionamento Segurança. Segurança para operação. Segurança para
Quinta-roda Manual do Usuário Segurança Montagem Operação Manutenção Índice Página Quinta-roda Aplicação e Dimensionamento. Aplicação. Dimensionamento Segurança. Segurança para operação. Segurança para
INFLUÊNCIA DE CARREGAMENTOS AERODINÂMICOS NA ESTABILIDADE DIRECIONAL DE VEÍCULOS RODOVIÁRIOS
 Gerson Luiz Brand INFLUÊNCIA DE CARREGAMENTOS AERODINÂMICOS NA ESTABILIDADE DIRECIONAL DE VEÍCULOS RODOVIÁRIOS Tese apresentada à Escola de Engenharia de São Carlos da Universidade de São Paulo, como parte
Gerson Luiz Brand INFLUÊNCIA DE CARREGAMENTOS AERODINÂMICOS NA ESTABILIDADE DIRECIONAL DE VEÍCULOS RODOVIÁRIOS Tese apresentada à Escola de Engenharia de São Carlos da Universidade de São Paulo, como parte
Projeto e implementação de controlador LQR com servomecanismo aplicado a um pêndulo invertido
 Projeto e implementação de controlador LQR com servomecanismo aplicado a um pêndulo invertido Lucas Vizzotto Bellinaso Engenharia Elétrica Universidade Federal de Santa Maria Santa Maria, Rio Grande do
Projeto e implementação de controlador LQR com servomecanismo aplicado a um pêndulo invertido Lucas Vizzotto Bellinaso Engenharia Elétrica Universidade Federal de Santa Maria Santa Maria, Rio Grande do
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS
 SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
FUSIPA. Quinta-roda 3 ½. Manual do Usuário. Segurança. Montagem. Operação. Manutenção
 Quinta-roda ½ Manual do Usuário Segurança Montagem Operação Manutenção Índice Página Quinta-roda ½ Aplicação e Dimensionamento. Aplicação. Dimensionamento Segurança. Segurança para operação. Segurança
Quinta-roda ½ Manual do Usuário Segurança Montagem Operação Manutenção Índice Página Quinta-roda ½ Aplicação e Dimensionamento. Aplicação. Dimensionamento Segurança. Segurança para operação. Segurança
Tratores. Informações gerais sobre tratores. Recomendações. Distância do eixo
 Informações gerais sobre tratores Informações gerais sobre tratores Os tratores foram projetados para puxar semirreboques e são, portanto, equipados com uma quinta roda para possibilitar a fácil troca
Informações gerais sobre tratores Informações gerais sobre tratores Os tratores foram projetados para puxar semirreboques e são, portanto, equipados com uma quinta roda para possibilitar a fácil troca
UM ESPORTIVO PARA TODOS OS DIAS.
 UM ESPORTIVO PARA TODOS OS DIAS. O SWIFT SPORT É UM ESPORTIVO COMPACTO COM A COMBINAÇÃO PERFEITA ENTRE ESPORTIVIDADE E CONFORTO PARA O DIA A DIA, VOCÊ NÃO PRECISA SER PILOTO PARA CURTIR O CARRO. O modelo
UM ESPORTIVO PARA TODOS OS DIAS. O SWIFT SPORT É UM ESPORTIVO COMPACTO COM A COMBINAÇÃO PERFEITA ENTRE ESPORTIVIDADE E CONFORTO PARA O DIA A DIA, VOCÊ NÃO PRECISA SER PILOTO PARA CURTIR O CARRO. O modelo
Capítulo 9. Projeto por Intermédio do Lugar das Raízes (Continuação)
") Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
Controle descentralizado de unidades de GD
 Controle descentralizado de unidades de GD Eletrônica de Potência para Redes Ativas de Distribuição Refs.: Análise de controle descentralizado em µgrid 2 2 Interligação (típica) de GD à rede trifásica
Controle descentralizado de unidades de GD Eletrônica de Potência para Redes Ativas de Distribuição Refs.: Análise de controle descentralizado em µgrid 2 2 Interligação (típica) de GD à rede trifásica
3. Modelos de funcionamento transiente de motores a dois tempos.
 3. Modelos de funcionamento transiente de motores a dois tempos. O modo de operação de um motor é resultado da combinação de diversos parâmetros de desempenho: a potência efetiva, kw e, o torque, Q e,
3. Modelos de funcionamento transiente de motores a dois tempos. O modo de operação de um motor é resultado da combinação de diversos parâmetros de desempenho: a potência efetiva, kw e, o torque, Q e,
Segundo Exercício de Modelagem e Simulação Computacional Maio 2012 EMSC#2 - MECÂNICA B PME 2200
 Segundo Exercício de Modelagem e Simulação Computacional Maio 01 EMSC# - MECÂNICA B PME 00 1. ENUNCIADO DO PROBLEMA Um planador (vide Fig. 1) se aproxima da pista do aeroporto para pouso com ângulo de
Segundo Exercício de Modelagem e Simulação Computacional Maio 01 EMSC# - MECÂNICA B PME 00 1. ENUNCIADO DO PROBLEMA Um planador (vide Fig. 1) se aproxima da pista do aeroporto para pouso com ângulo de
Modelagem no Domínio do Tempo
 CAPÍTULO TRÊS Modelagem no Domínio do Tempo SOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO Controle de Antena: Representação no Espaço de Estados Para o amplificador de potência, E s a() V () s 150. Usando a
CAPÍTULO TRÊS Modelagem no Domínio do Tempo SOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO Controle de Antena: Representação no Espaço de Estados Para o amplificador de potência, E s a() V () s 150. Usando a
Pré-requisito Coreq Disciplina EM Expressão Gráfica - Ativa desde: 01/01/2016. Natureza - OBRIGATÓRIA PRÁTICA 36 TEÓRICA 18
 1 de 5 01 - - EM16101 - Expressão Gráfica - Ativa desde: EM16102 - Filosofia - Ativa desde: EM16103 - Física: Cinemática e Dinâmica - Ativa desde: EM16104 - Informática e Algorítmo - Ativa desde: EM16105
1 de 5 01 - - EM16101 - Expressão Gráfica - Ativa desde: EM16102 - Filosofia - Ativa desde: EM16103 - Física: Cinemática e Dinâmica - Ativa desde: EM16104 - Informática e Algorítmo - Ativa desde: EM16105
TREINAMENTO MANUTENÇÃO DE PNEUS
 TREINAMENTO MANUTENÇÃO DE PNEUS O PNEU SEGURO ELO DE LIGAÇÃO ENTRE O VEÍCULO E O SOLO COMO SURGIU O PNEU RODAS COM BORRACHA - MACIÇO RODA DE BICICLETA COM CÂMARA RODAS MAIORES COM CÂMARA E PNEU EVOLUÇÃO
TREINAMENTO MANUTENÇÃO DE PNEUS O PNEU SEGURO ELO DE LIGAÇÃO ENTRE O VEÍCULO E O SOLO COMO SURGIU O PNEU RODAS COM BORRACHA - MACIÇO RODA DE BICICLETA COM CÂMARA RODAS MAIORES COM CÂMARA E PNEU EVOLUÇÃO
Introdução. 1.1 Motivação
 16 1 Introdução 1.1 Motivação Um transportador pessoal robótico auto-equilibrante (TPRE) é uma plataforma com duas rodas paralelas que funciona a partir do equilíbrio do indivíduo que o utiliza, assemelhando-se
16 1 Introdução 1.1 Motivação Um transportador pessoal robótico auto-equilibrante (TPRE) é uma plataforma com duas rodas paralelas que funciona a partir do equilíbrio do indivíduo que o utiliza, assemelhando-se
Manual de Experimentos de Sistemas de Controle
 Manual de Experimentos de Sistemas de Controle Laboratório de Automação Industrial e Robótica 29 de setembro de 2017 Universidade Federal do Amazonas Sumário 1 Representação e Simulação de Sistemas em
Manual de Experimentos de Sistemas de Controle Laboratório de Automação Industrial e Robótica 29 de setembro de 2017 Universidade Federal do Amazonas Sumário 1 Representação e Simulação de Sistemas em
Modelagem e simulação de um motor CC simples usando solidthinking Activate
 Modelagem e simulação de um motor CC simples usando solidthinking Activate Motor CC simples A velocidade de rotação do rotor de um motor CC é controlada pela aplicação de uma tensão contínua V ao enrolamento
Modelagem e simulação de um motor CC simples usando solidthinking Activate Motor CC simples A velocidade de rotação do rotor de um motor CC é controlada pela aplicação de uma tensão contínua V ao enrolamento
Controlador PID discreto
 1 Capítulo 1 Controlador PID discreto 1.1 Objetivo O objetivo deste experimento é introduzir ao estudante as noções básicas de um controlador PID discreto para um motor de corrente contínua. 1.2 Modelo
1 Capítulo 1 Controlador PID discreto 1.1 Objetivo O objetivo deste experimento é introduzir ao estudante as noções básicas de um controlador PID discreto para um motor de corrente contínua. 1.2 Modelo
ANÁLISE DO COMPORTAMENTO DE UM VEÍCULO LEVE EM MANOBRA DE FRENAGEM
 ANÁLISE DO COMPORTAMENTO DE UM VEÍCULO LEVE EM MANOBRA DE FRENAGEM André Louzada Moreira Departamento de Engenharia Mecânica e de Materiais Instituto Militar de Engenharia alouzada@epq.ime.eb.br Fernando
ANÁLISE DO COMPORTAMENTO DE UM VEÍCULO LEVE EM MANOBRA DE FRENAGEM André Louzada Moreira Departamento de Engenharia Mecânica e de Materiais Instituto Militar de Engenharia alouzada@epq.ime.eb.br Fernando
1 Introdução Objetivo
 Introdução 21 1 Introdução 1.1. Objetivo O presente trabalho propõe um procedimento de modelagem modular para os subsistemas existentes em um veículo terrestre, em que o grau de detalhamento depende do
Introdução 21 1 Introdução 1.1. Objetivo O presente trabalho propõe um procedimento de modelagem modular para os subsistemas existentes em um veículo terrestre, em que o grau de detalhamento depende do
PMR3404 Controle I Aula 3
 PMR3404 Controle I Aula 3 Resposta estática Ações de controle PID Newton Maruyama 23 de março de 2017 PMR-EPUSP Classificação de sistemas de acordo com o seu desempenho em regime estático Seja o seguinte
PMR3404 Controle I Aula 3 Resposta estática Ações de controle PID Newton Maruyama 23 de março de 2017 PMR-EPUSP Classificação de sistemas de acordo com o seu desempenho em regime estático Seja o seguinte
Rodrigo Luís Pereira Barreto
 Rodrigo Luís Pereira Barreto SIMULAÇÃO DE ÂNGULOS DE DERIVA E DINÂMICA VEICULAR LATERAL UTILIZANDO MODELO DE QUATRO RODAS COM RESTRIÇÕES GEOMÉTRICAS E CINEMÁTICAS Dissertação submetida ao Programa de Pós
Rodrigo Luís Pereira Barreto SIMULAÇÃO DE ÂNGULOS DE DERIVA E DINÂMICA VEICULAR LATERAL UTILIZANDO MODELO DE QUATRO RODAS COM RESTRIÇÕES GEOMÉTRICAS E CINEMÁTICAS Dissertação submetida ao Programa de Pós
Pontifícia Universidade Católica de São Paulo Graduação em Matemática Empresarial
 Ciências Humanas e Sociais 36 30 -- -- -- -- -- -- 30 -- 2 36 30 Economia 1 36 30 18 15 -- -- -- -- 45 -- 3 54 45 Fundamentos de Matemática 72 60 -- -- -- -- -- -- -- 60 4 72 60 1º Introdução à Geometria
Ciências Humanas e Sociais 36 30 -- -- -- -- -- -- 30 -- 2 36 30 Economia 1 36 30 18 15 -- -- -- -- 45 -- 3 54 45 Fundamentos de Matemática 72 60 -- -- -- -- -- -- -- 60 4 72 60 1º Introdução à Geometria
Prof. Dr. Ronaldo Rodrigues Pelá. 12 de março de 2013
 GIROSCÓPIO Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 12 de março de 2013 Roteiro 1 2 Roteiro 1 2 Dinâmica F (ext) = M a CM τ (ext) = d L dt L = M r CM v CM + L CM τ (ext) CM = d L
GIROSCÓPIO Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 12 de março de 2013 Roteiro 1 2 Roteiro 1 2 Dinâmica F (ext) = M a CM τ (ext) = d L dt L = M r CM v CM + L CM τ (ext) CM = d L
Conteúdo. Definições básicas;
 Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
PTR Transporte Ferroviário e Transporte Aéreo. Escola Politécnica da Universidade de São Paulo
 PTR- 2501 Transporte Ferroviário e Transporte Aéreo 1/ 27 Freight Action Along the Clark Fork River, Montana Prof. Dr. Telmo Giolito Porto PTR 2501 Transporte Ferroviário e Transporte Aéreo Ricardo Martins
PTR- 2501 Transporte Ferroviário e Transporte Aéreo 1/ 27 Freight Action Along the Clark Fork River, Montana Prof. Dr. Telmo Giolito Porto PTR 2501 Transporte Ferroviário e Transporte Aéreo Ricardo Martins
Questões para Revisão Controle
 Questões para Revisão Controle 1. (PROVÃO-1999)A Figura 1 apresenta o diagrama de blocos de um sistema de controle, e a Figura 2, o seu lugar das raízes para K > 0. Com base nas duas figuras, resolva os
Questões para Revisão Controle 1. (PROVÃO-1999)A Figura 1 apresenta o diagrama de blocos de um sistema de controle, e a Figura 2, o seu lugar das raízes para K > 0. Com base nas duas figuras, resolva os
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Onde estamos? Nosso roteiro ao longo deste capítulo Cinemática retilínea: movimento contínuo
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Onde estamos? Nosso roteiro ao longo deste capítulo Cinemática retilínea: movimento contínuo
OTIMIZAÇÃO DOS PARÂMETROS DA SUSPENSÃO PARA UM MODELO DE UM QUARTO DE VEÍCULO. Sousa, Darlan Avila, Suzana
 OTIMIZAÇÃO DOS PARÂMETROS DA SUSPENSÃO PARA UM MODELO DE UM QUARTO DE VEÍCULO Sousa, Darlan Avila, Suzana Faculdade de Engenharia Campus Gama Universidade de Brasília (UnB/FGA) Área Especial de Indústria
OTIMIZAÇÃO DOS PARÂMETROS DA SUSPENSÃO PARA UM MODELO DE UM QUARTO DE VEÍCULO Sousa, Darlan Avila, Suzana Faculdade de Engenharia Campus Gama Universidade de Brasília (UnB/FGA) Área Especial de Indústria
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA MECÂNICA
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA MECÂNICA COMPORTAMENTO DINÂMICO DE MODELO DE ÔNIBUS SOB MANOBRA DIRECIONAL por Eduardo Botti Noronha Monografia
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA MECÂNICA COMPORTAMENTO DINÂMICO DE MODELO DE ÔNIBUS SOB MANOBRA DIRECIONAL por Eduardo Botti Noronha Monografia
Controladores. Prof. André Schneider de Oliveira
 Controladores Prof. André Schneider de Oliveira Estrutura da apresentação Introdução ao Simulink Modelo do Automatic Cruise Control (ACC) Diagrama de Controle PI para o ACC Diagrama de Controle PID para
Controladores Prof. André Schneider de Oliveira Estrutura da apresentação Introdução ao Simulink Modelo do Automatic Cruise Control (ACC) Diagrama de Controle PI para o ACC Diagrama de Controle PID para
Sistemas a Tempo Discreto
 Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Profº Carlos Alberto
 Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
1.1 Origem da suspensão automotiva
 1 INTRODUÇÃO A indústria automobilística foi marcada por inovações ao longo de mais de um século de evolução. Mas em seu início, estas inovações, de certa forma, eram ocasionadas por muito empirismo. A
1 INTRODUÇÃO A indústria automobilística foi marcada por inovações ao longo de mais de um século de evolução. Mas em seu início, estas inovações, de certa forma, eram ocasionadas por muito empirismo. A
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA
 CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
AB Roteiro para o relatório
 AB-722 - Roteiro para o relatório Professore: Flávio Ribeiro 2018 A seguinte lista de exercícios deve ser apresentada na forma de um relatório. Ela está dividida em duas partes: a primeira consiste em
AB-722 - Roteiro para o relatório Professore: Flávio Ribeiro 2018 A seguinte lista de exercícios deve ser apresentada na forma de um relatório. Ela está dividida em duas partes: a primeira consiste em
2 Equações do Sistema
 2 Equações do Sistema Este capítulo irá apresentar as equações usadas no estudo, mostrando passo a passo como foi feita a modelagem desse sistema. Uma maneira fácil de entender seu funcionamento é pensá-lo
2 Equações do Sistema Este capítulo irá apresentar as equações usadas no estudo, mostrando passo a passo como foi feita a modelagem desse sistema. Uma maneira fácil de entender seu funcionamento é pensá-lo
Para alimentar o motor, a placa do amplificador de potência foi limitada nos seguintes valores:
 4 Simulações Esse capítulo apresenta as simulações numéricas com o modelo matemático do sistema de pêndulo planar apresentado por equações nos capítulos anteriores. Os resultados aqui apresentados foram
4 Simulações Esse capítulo apresenta as simulações numéricas com o modelo matemático do sistema de pêndulo planar apresentado por equações nos capítulos anteriores. Os resultados aqui apresentados foram
Capítulo 11. Projeto por Intermédio da Resposta de Freqüência
 Capítulo 11 Projeto por Intermédio da Resposta de Freqüência Fig. 11.1 Gráficos de Bode mostrando o ajuste de ganho para uma margem de fase desejada Fase (graus) Aumento de ganho necessário 2 Fig. 11.2
Capítulo 11 Projeto por Intermédio da Resposta de Freqüência Fig. 11.1 Gráficos de Bode mostrando o ajuste de ganho para uma margem de fase desejada Fase (graus) Aumento de ganho necessário 2 Fig. 11.2
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Unidades de reboque. Mais informações sobre unidades de reboque estão disponíveis no documento Adaptações da extremidade traseira.
 Informações gerais sobre unidades de reboque Unidades de reboque é um termo coletivo que designa componentes com os quais o veículo deve estar equipado para rebocar um reboque. Informações gerais sobre
Informações gerais sobre unidades de reboque Unidades de reboque é um termo coletivo que designa componentes com os quais o veículo deve estar equipado para rebocar um reboque. Informações gerais sobre
Condições de Equilíbrio de Vôo. Linearização.
 Introdução ao Controle Automático de Aeronaves Condições de Equilíbrio de Vôo Linearização Leonardo Tôrres torres@cpdeeufmgbr Escola de Engenharia Universidade Federal de Minas Gerais/EEUFMG Dep Eng Eletrônica
Introdução ao Controle Automático de Aeronaves Condições de Equilíbrio de Vôo Linearização Leonardo Tôrres torres@cpdeeufmgbr Escola de Engenharia Universidade Federal de Minas Gerais/EEUFMG Dep Eng Eletrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA I. INTRODUÇÃO MPS-43: SISTEMAS DE CONTROLE Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica http://www.professordavisantos.com
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA I. INTRODUÇÃO MPS-43: SISTEMAS DE CONTROLE Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica http://www.professordavisantos.com
Controle de Sistemas Dinâmicos. Informações básicas
 Controle de Sistemas Dinâmicos Informações básicas Endereço com material http://sites.google.com/site/disciplinasrgvm/ Ementa Modelagem de Sistemas de Controle; Sistemas em Malha Aberta e em Malha Fechada;
Controle de Sistemas Dinâmicos Informações básicas Endereço com material http://sites.google.com/site/disciplinasrgvm/ Ementa Modelagem de Sistemas de Controle; Sistemas em Malha Aberta e em Malha Fechada;
DINAMICA DA BOLA SALTANDO (BOUNCING BALL)
") 1 DINAMICA DA BOLA SALTANDO (BOUNCING BALL) Modelagem e Simulação Prof. Dr. Roberto Spinola Barbosa São Paulo RSB LDSV 17 1. Introdução Os sistemas mecânicos podem estar submetidos a impactos durante a
1 DINAMICA DA BOLA SALTANDO (BOUNCING BALL) Modelagem e Simulação Prof. Dr. Roberto Spinola Barbosa São Paulo RSB LDSV 17 1. Introdução Os sistemas mecânicos podem estar submetidos a impactos durante a
Física I. Dinâmica de Corpos Rígidos Lista de Exercícios
 Física I Dinâmica de Corpos Rígidos Lista de Exercícios 1. Campo de Velocidades e Centro Instantâneo de Rotação Dados os itens abaixo, responda ao que se pede: a. O disco abaixo está preso a uma articulação
Física I Dinâmica de Corpos Rígidos Lista de Exercícios 1. Campo de Velocidades e Centro Instantâneo de Rotação Dados os itens abaixo, responda ao que se pede: a. O disco abaixo está preso a uma articulação
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA DA USP ANDRÉ DE SOUZA MENDES PROJETO DE OBSERVADOR DE ESTADOS PARA UM CARRO
 PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA DA USP ANDRÉ DE SOUZA MENDES PROJETO DE OBSERVADOR DE ESTADOS PARA UM CARRO São Paulo 2016 LISTA DE ILUSTRAÇÕES Ilustração 1 Modelo do veículo............................
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA DA USP ANDRÉ DE SOUZA MENDES PROJETO DE OBSERVADOR DE ESTADOS PARA UM CARRO São Paulo 2016 LISTA DE ILUSTRAÇÕES Ilustração 1 Modelo do veículo............................
ENGENHARIA DE CONTROLE
 ENGENHARIA DE CONTROLE Prof. Reinaldo M. Palhares Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/controlelinear.html Terças- e Quintas-Feiras 07h30 a 09h10 Aspectos
ENGENHARIA DE CONTROLE Prof. Reinaldo M. Palhares Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/controlelinear.html Terças- e Quintas-Feiras 07h30 a 09h10 Aspectos
VEHICLE DYNAMICS - LATERAL ANDRÉ DE SOUZA MENDES ARTICULATED VEHICLE MODEL
 VEHICLE DYNAMICS - LATERAL ANDRÉ DE SOUZA MENDES ARTICULATED VEHICLE MODEL São Bernardo do Campo 2016 0.1 MODELO DO VEÍCULO ARTICULADO O modelo físico do conjunto é ilustrado na figura 1. Para caracterizar
VEHICLE DYNAMICS - LATERAL ANDRÉ DE SOUZA MENDES ARTICULATED VEHICLE MODEL São Bernardo do Campo 2016 0.1 MODELO DO VEÍCULO ARTICULADO O modelo físico do conjunto é ilustrado na figura 1. Para caracterizar
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA. 2ª Lista de SEL0417 Fundamentos de Controle.
 UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA ª Lista de SEL0417 undamentos de Controle Professor: Rodrigo Andrade Ramos Questão 1 Suponha que um satélite
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA ª Lista de SEL0417 undamentos de Controle Professor: Rodrigo Andrade Ramos Questão 1 Suponha que um satélite
Modelagem da cinemática lateral de um veículo representado por uma particula orientada.
 Modelagem da cinemática lateral de um veículo representado por uma particula orientada. Aluno: Ramon Felipe Brandão do Nascimento Orientador: Mauro Speranza Neto 1 Introdução O estudo da dinâmica de um
Modelagem da cinemática lateral de um veículo representado por uma particula orientada. Aluno: Ramon Felipe Brandão do Nascimento Orientador: Mauro Speranza Neto 1 Introdução O estudo da dinâmica de um
BALANCEAMENTO / GEOMETRIA
 BALANCEAMENTO / GEOMETRIA Preparado para conhecer muito mais sobre o assunto?! Então vamos lá! Todo conjunto rodante após montado e instalado no veículo está sujeito a desequilíbrio que se traduzem em
BALANCEAMENTO / GEOMETRIA Preparado para conhecer muito mais sobre o assunto?! Então vamos lá! Todo conjunto rodante após montado e instalado no veículo está sujeito a desequilíbrio que se traduzem em
ESTUDO NO DESENVOLVIMENTO DE SUSPENSÃO DUPLO A E APLICAÇÃO EM VEÍCULO DE CLASSE FÓRMULA SAE
 UNIVERSIDADE FEDERAL DE SANTA CATARINA - CAMPUS JOINVILLE CENTRO DE ENGENHARIAS DA MOBILIDADE CURSO BACHARELADO INTERDISCIPLINAR EM MOBILIDADE ESTUDO NO DESENVOLVIMENTO DE SUSPENSÃO DUPLO A E APLICAÇÃO
UNIVERSIDADE FEDERAL DE SANTA CATARINA - CAMPUS JOINVILLE CENTRO DE ENGENHARIAS DA MOBILIDADE CURSO BACHARELADO INTERDISCIPLINAR EM MOBILIDADE ESTUDO NO DESENVOLVIMENTO DE SUSPENSÃO DUPLO A E APLICAÇÃO
Pré-requisito Coreq Disciplina EMC101 - Expressão Gráfica - Ativa desde: 01/01/2008. Natureza - OBRIGATÓRIA PRÁTICA 36 TEÓRICA 18
 1 de 5 Nível:BACHARELADO Início: 20081 01 - - EMC101 - Expressão Gráfica - Ativa desde: 01/01/2008 EMC102 - Filosofia - Ativa desde: Natureza - OBRIGATÓRIA EMC103 - Física: Cinemática e Dinâmica - Ativa
1 de 5 Nível:BACHARELADO Início: 20081 01 - - EMC101 - Expressão Gráfica - Ativa desde: 01/01/2008 EMC102 - Filosofia - Ativa desde: Natureza - OBRIGATÓRIA EMC103 - Física: Cinemática e Dinâmica - Ativa
SUMÁRIO. 1 Preparando o Cenário para o Estudo da Dinâmica Cinemática da Partícula... 29
 SUMÁRIO 1 Preparando o Cenário para o Estudo da Dinâmica... 1 1.1 Uma Breve História da Dinâmica...1 Isaac Newton (1643-1727)... 3 Leonhard Euler (1707-1783)... 6 1.2 Conceitos Fundamentais...8 Espaço
SUMÁRIO 1 Preparando o Cenário para o Estudo da Dinâmica... 1 1.1 Uma Breve História da Dinâmica...1 Isaac Newton (1643-1727)... 3 Leonhard Euler (1707-1783)... 6 1.2 Conceitos Fundamentais...8 Espaço
Ações de controle básicas: uma análise do desempenho em regime
 Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Vibrações Mecânicas. Sistemas Contínuos. DEMEC UFPE Ramiro Willmersdorf
 Vibrações Mecânicas DEMEC UFPE Ramiro Willmersdorf ramiro@willmersdor.net Sistemas contínuos ou distribuídos Equações diferenciais parciais; Cabos, cordas, vigas, etc.; Membranas, placas, etc; Processo
Vibrações Mecânicas DEMEC UFPE Ramiro Willmersdorf ramiro@willmersdor.net Sistemas contínuos ou distribuídos Equações diferenciais parciais; Cabos, cordas, vigas, etc.; Membranas, placas, etc; Processo
Capítulo 8. Técnicas do Lugar das Raízes
 Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
2 Revisão Bibliográfica
 2 Revisão Bibliográfica Este capítulo apresenta o embasamento teórico que justificou a proposição de uma nova estratégia de controle segmentada, para aumentar a estabilidade global de um sistema mecatrônico
2 Revisão Bibliográfica Este capítulo apresenta o embasamento teórico que justificou a proposição de uma nova estratégia de controle segmentada, para aumentar a estabilidade global de um sistema mecatrônico
Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos
 Modelagem de Sistemas de Rotação e Eletromecânicos") Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos
Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA. SUBÁREA: Engenharias
 TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
ESTUDO COMPARATIVO DA ESTABILIDADE DIRECIONAL DE DUAS COMBINAÇÕES VEICULARES TIPO CAVALO SEMI-REBOQUE
 ESTUDO COMPARATIVO DA ESTABILIDADE DIRECIONAL DE DUAS COMBINAÇÕES VEICULARES TIPO CAVALO SEMI-REBOQUE Eng., MSc. Juan Carlos Horta Gutiérrez Prof., Dr. Antônio Carlos Canale Universidade de São Paulo,
ESTUDO COMPARATIVO DA ESTABILIDADE DIRECIONAL DE DUAS COMBINAÇÕES VEICULARES TIPO CAVALO SEMI-REBOQUE Eng., MSc. Juan Carlos Horta Gutiérrez Prof., Dr. Antônio Carlos Canale Universidade de São Paulo,
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização