SUPRESSÃO DE CAOS EM UM SISTEMA VIBRO IMPÁCTO UTILIZANDO O PROJETO DE CONTROLE LINEAR ÓTIMO
|
|
|
- Rafael de Figueiredo Barros
- 5 Há anos
- Visualizações:
Transcrição
1 Revista Iberoamericana de Ingeniería Mecánica. Vol. 22, N.º 1, pp , 2018 SUPRESSÃO DE CAOS EM UM SISTEMA VIBRO IMPÁCTO UTILIZANDO O PROJETO DE CONTROLE LINEAR ÓTIMO RODRIGO FRANCISCO BORGES LOURENÇO 1, FÁBIO ROBERTO CHAVARETTE 2, EDSON ROBERTO DA SILVA 1 1 Programa de Pós Graduação em Engenharia Mecânica, 2 Departamento de Matemática UNESP Univ. Estadual Paulista. Faculdade de Engenharia de Ilha Solteira (FEIS) Rua Rio de Janeiro, CEP: Ilha Solteira, SP, Brasil. (Recibido 24 de agosto de 2017, revisado 6 de octubre de 2017, para publicación 1 de noviembre de 2017) Resumo Vibrações mecânicas são comuns em equipamentos de engenharia e podem ser observadas sob forma de acelerações, deslocamentos e velocidade. Essas vibrações, na maioria dos sistemas dinâmicos, são consideradas como algo indesejado e podem ser danosos. Porém, existem situações que são utilizadas para melhorar o funcionamento e desempenho de máquinas. São diversas as causas de vibrações em sistemas de engenharia, neste trabalho, destacam-se as vibrações causadas por impacto. Quando componentes destes sistemas impactam entre si, causando ruídos de curta duração, são caracterizados como sistemas tipo vibro - impacto. Podem ser citados diversos equipamentos com essas características, como rolos compactadores de solo, martelos de impacto, perfuratrizes de solo, etc. Neste trabalho, demonstra-se o comportamento dinâmico de um sistema vibro impactante. A partir da variação da frequência de excitação, foi observado um comportamento caótico. Diante disto, foi desenvolvido projeto de controlador linear ótimo, a fim de atenuar as vibrações nas regiões de operação nas quais o sistema é instável. Comprovou-se que a estratégia de controle linear ótimo demonstra eficiência para este tipo de situação e pode ser utilizada na redução de danos, evitando prejuízos econômicos, perdas biológicas e materiais. Palavras-chave Análise de estabilidade, caos, controle linear ótimo, simulação numérica, vibrações mecânicas. 1. INTRODUÇÃO Há muitas atividades humanas que envolvem vibrações. O simples fato de se ouvir, respirar, andar ou enxergar está relacionado com alguma forma de vibrar das moléculas do corpo [8]. É muito comum que diversos objetos de nosso cotidiano apresentem vibrações, e elas podem ser representadas em forma de velocidade, acelerações e deslocamento [6]. Apesar de na maioria dos sistemas mecânicos de engenharia a presença de vibrações ser algo danoso e indesejado, existem situações em que é necessário o uso de impacto para gerar vibrações em certas partes do sistema. Sistemas mecânicos submetidos a esse tipo de excitação são denominados de vibro-impacto. O estudo desse fenômeno é evidenciado quando dois componentes em contato sofrem impactos entre si, gerando assim ruídos de curta duração [1]. Podem ser citados diversos equipamentos que utilizam impacto para o melhor desempenho de suas funções, sendo como exemplos britadeiras, máquinas compactadoras, furadeiras de impacto, entre outros diversos. Tratando-se de mecanismos de vibro-impacto, destacase o estudo em perfuratrizes de solo, que no geral são equipamentos muito robustos e que quando falham causam grandes danos [7]. Assim, cada vez mais se torna importante o estudo de mecanismos do tipo vibro-impacto, especialmente quando há presença de folga, pois sofrem com desgastes excessivos, elevados níveis de ruído, vibrações com grandes amplitudes, podendo muitas vezes gerar falhas prematuras. Portanto, estes estudos podem auxiliar na sua prevenção e controle de vibrações e ruídos dos sistemas [6].
, representado por dois graus de liberdade.")
2 36 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) Ing et al. [3] propôs um modelo experimental que abordava o comportamento de um sistema dinâmico (estável/instável), representado por dois graus de liberdade. Esse sistema estudado apresentava comportamentos diversos que iam de periódico a caótico. Com isso, os autores previram comportamentos e explicaram observações prévias. Tal estudo considerou sistemas fisicamente existentes, e também idealizados, para representarem condições de projetos. Na maioria das aplicações, os testes experimentais têm custo elevado e envolvem algum perigo, por isto, a modelagem matemática da dinâmica dos sistemas se destaca como boa alternativa [5]. A modelagem matemática tem por finalidade representar aspectos importantes do sistema, com a meta de formular equações que representem seu comportamento [8]. Um bom modelo matemático deve conter a maior quantidade possível de detalhes para se descrever o sistema, sem torná-lo complexo além do necessário para cada análise de interesse. Assim, dependendo do comportamento de seus componentes, pode-se defini-lo como linear ou não linear e, consequentemente, o nível de complexidade ser alterado de forma significativa. É comum em sistemas dinâmicos a ocorrência de condições de instabilidade. Afim de prevenir danos estruturais causados por esta ocorrência, podem ser utilizados dispositivos de controle. Tal controle estrutural pode acontecer através de dispositivos externos ou por ação de forças sobre a estrutura. Neste sentido, existem diversos tipos de dispositivos com esta finalidade e, comumente são classificados como passivos, ativos, híbridos e semi-ativos [2]. Contudo, neste trabalho apresenta-se um estudo do comportamento dinâmico de um sistema vibroimpacto, representado por um modelo físico de dois graus de liberdade proposto por Ing et al. [3]. São encontradas as regiões de estabilidade e instabilidade do sistema e, após se identificar os pontos de equilíbrio, propõe-se um mecanismo de controle através de um controlador linear ótimo (LQR, do inglês Linear Quadratic Regulator). 2. MODELO O modelo físico adotado neste trabalho, representado na Fig. 1, é uma simplificação do modelo experimental considerado por Ing et al. [3]. O modelo consiste de um corpo de massa m, presa a uma base oscilante através de uma mola com coeficiente de rigidez k 1 e um amortecedor viscoso com coeficiente de amortecimento c. No modelo existe uma segunda mola com coeficiente de rigidez k 2, após folga existente denominada. O corpo de massa m pode se deslocar em função da oscilação S=A sen(2πft), sendo f a frequência de oscilação e t o tempo. Quando a base sofre oscilação, faz com que a massa se desloque, impactando sobre a rigidez secundária, caracterizando assim, um sistema vibro-impactante. Aplicando a Lei da Mecânica Clássica de Newton, escreve-se a equação de movimento conforme equação (1). O movimento do bloco é representado por z, e o movimento da base representado por s, portanto o movimento relativo entre a base oscilatória e o bloco será denominado como y zs. Quando o movimento relativo y é menor ou igual a folga φ, observa-se que o sistema não sofre ação de impacto. A partir do momento em que o movimento y se torna maior que a folga, o sistema se torna impactante, e a rigidez k passa a agir sobre a estrutura. Então, existem duas situações distintas a serem consideradas, sistema impactante e sem impacto. Fig. 1. Modelo vibro-impacto [3].
3 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) 37 No caso sem impacto, representado pela equação 1, tem-se: my k ycy ms (1) Também, no caso com impacto, indicado pela equação 2, tem-se: my k yk yφcy ms (2) Ainda, afím de expressar as equações (1) e (2) de forma adimensional, define-se: τω t x ω ω ξ onde ω é a frequência natural de oscilação do sistema e ξ o fator de amortecimento do sistema linear associado, ou seja, sem a influência da folga. Para o movimento relativo y é menor que a folga, tem-se m c k ym (3) Como ω, portanto, a equação (3) é reescrita, tal que: mω cω k ymω (4) Dividindo a equação por y, que representa uma distância de referência arbitrária e mω, tem-se: (5) Aplicando-se yxy, y, dy y dx, y y x, tem-se: x x x (6) Conforme proposto, tem-se o movimento harmônico da base, dado por: SAsen2πft (7) sendo 2πf a frequência de excitação, representada por p em sua forma angular, e A é a amplitude da força de excitação. Assim, reescrevendo a função tem se: SAsenpt (8) Também, considerando t, conforme definido prevamente, tem-se: SAsenp (9) Finalmente, como ω, portanto a função equivalente ao movimento harmônico do sistema é: SAsenωτ (10) Aplicando a derivada segundo na equação (10), tem-se: S Aωcosωτ (11) S Aω senωτ (12) Substituindo ω, 2ξ e S Aω senωτ na equação (6), tem-se: x 2ξx x ω senωτ (13) Considerando a e isolando x, tem-se a equação de movimento harmônico sem atrito:
4 38 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) x aω senωτ 2ξx x (14) Aplicando o mesmo procedimento para a equação 2, considerando e e β, tem-se a equação de movimento harmônico com impacto: x aω senωτ 2ξx xβx e (15) Afim de criar uma função única, que represente as duas situações, é necessário a utilização de uma função auxiliar degrau. Esta função, denominada também função de Heaviside, aqui representada por Hx e, tem valor 1 quando x e 0, e valor 0 quando x e 0. Logo a equação única é: x aω senωτ 2ξx xβx ehx e (16) Fazendo x x,e x x, temos: x x x aω senωτ 2ξx xβx ehx e (17) 3. SIMULAÇÃO NUMÉRICA As simulações foram feitas utilizando o software Octave, através do integrador numérico Runge-Kutta de quarta ordem, com passos de tempo e frequência automáticos. As condições iniciais utilizadas nas simulações foram extraídas de Ing et al. [3], e estão apresentadas na tabela Análise do Sistema para ω 0, 906 A Fig. 2 ilustra o comportamento estável do sistema dinâmico com as projeções dos planos de fases, históricos no tempo, espectros de frequência e mapa de poincaré para o modelo abordado. As Figuras 2a e 2b apresentam o histórico no tempo para deslocamento e velocidade, respectivamente, ambos em função do tempo. Nota-se que, nesta frequência de excitação, existem frequências menores nos diagramas, porém, sem grandes interferências na estabilidade do comportamento do oscilador. Considerase então que o comportamento é periódico no decorrer do tempo. As Figuras 2c e 2d apresentam os espectros de frequência para deslocamento e velocidade, respectivamente. É possível observar nos dois diagramas que há uma frequência predominante na faixa de 0,2. A Figura 2e apresenta o plano de fase, que é a relação entre as coordenadas generalizadas, velocidade e deslocamento. No diagrama há a predominância de apenas uma frequência, representada pelas linhas mais escuras do gráfico. É possível observar também frequências de menor intensidade, porém não se mostram dominantes. O movimento apresentado no diagrama é periódico estável (sem perturbações no sistema). Tabela 1. Parâmetros adimensionais utilizados nas simulações computacionais. Parâmetros Valores a 0,3 ω 0,906; 0,996 τ ξ 0,01 β 29 e 1,26
 Deslocamento versus tempo, b) Velocidade versus tempo, c) Deslocamento versus frequência.d) Velocidade versus frequência, e) Plano de Fase e f) Mapa de poincaré.")


5 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) 39 a) b) c) d) e) f) Fig. 2. Comportamento da Estrutura. a) Deslocamento versus tempo, b) Velocidade versus tempo, c) Deslocamento versus frequência.d) Velocidade versus frequência, e) Plano de Fase e f) Mapa de poincaré. A Figura 2f apresenta o mapa de Poincaré. Pode-se identificar apenas um ponto de intersecção, ou seja, comprova a existência de somente uma frequência principal na dinâmica estável do oscilador Análise do Sistema para ω 0, 996 A Fig. 3 ilustra o comportamento estável do sistema dinâmico com as projeções dos planos de fases, históricos no tempo, espectros de frequência e mapa de poincaré para o modelo abordado. As Figuras 3a e 3b apresentam o histórico no tempo para deslocamento e velocidade, respectivamente, ambos em função do tempo. Nos diagramas é possível notar a presença de três frequência distintas, que se mostram significativas com relação à dinâmica do sistema.
 Deslocamento versus tempo, b) Velocidade versus tempo, c) Deslocamento versus frequência.d) Velocidade versus frequência, e) Plano de Fase e f) Mapa de poincaré.")


6 40 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) a) b) c) d) e) f) Fig. 3. Comportamento da Estrutura. a) Deslocamento versus tempo, b) Velocidade versus tempo, c) Deslocamento versus frequência.d) Velocidade versus frequência, e) Plano de Fase e f) Mapa de poincaré. As Figuras 3c e 3d apresentam os espectros de frequência para deslocamento e velocidade, respectivamente. É notório que há a recorrência de três frequências distintas no sistema, sendo a maior 0,23, seguida da segunda com 0,16 e a terceira 0,04. A Figura 3e apresenta o plano de fases, mostrado na forma de velocidade em função do deslocamento. Nota-se que no diagrama, e segundo os autovalores da matriz de equilíbrio, λ 1,2 = 0,0100 ± 0,9999i, o movimento é periódico e estável com três frequências distintas e bem definidas neste ponto. A Figura 3f apresenta o mapa de Poincaré. Através do diagrama é possível confirmar a existência de três frequências distintas, pois há três pontos de intersecção das trajetórias Expoentes de Lyapunov Uma considerável dependência do sistema pelas suas condições iniciais pode ser quantificada pelos expoentes de Lyapunov. Esses expoentes medem a taxa exponencial média de divergência da vizinhança de
7 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) 41 a) b) c) d) Fig. 4. Expoentes de Lyapunov. determinada trajetória. Esta definição é fundamental para caracterização do caos em sistemas dinâmicos [4]. É importante salientar que o método dos expoentes de Lyapunov faz uma predição do comportamento que o sistema assume com a sua evolução no tempo, enquanto que a estabilidade estrutural analisa o sistema pontualmente dados os parâmetros de excitação e um tempo específico. Nas subseções seguintes, é apresentada a evolução temporal dos coeficientes de Lyapunov, para a combinação de deslocamento e velocidade Deslocamento 1, velocidade 0 Na Figura 4a, é apresentada a evolução dos coeficientes de Lyapunov para um intervalo de 200 amostras de tempo (taxa), com passos de 0,01. Os coeficientes de Lyapunov se apresentaram de forma positiva em toda a evolução do tempo, isto evidencia que o comportamento dinâmico do sistema no decorrer do tempo tende ao caos Deslocamento 0, velocidade 1 Nestas condições, os autovalores evoluem de forma idêntica da subseção anterior, ou seja, evolui rapidamente até aproximadamente 15 amostras de tempo (taxa), a partir daí se mantém estável até o final do tempo, como ilustra a Figura 4b Deslocamento 2, velocidade 0 Observando o conjunto de autovalores da Figura 4c, é notório um pico de crescimento positivo logo no início. Após esse pico os valores caem, e se estabilizam, sofrendo pouca alteração até o final do intervalo. Os coeficientes de Lyapunov se apresentaram de forma positiva em toda a evolução do tempo, isto evidencia que o comportamento dinâmico do sistema no decorrer do tempo tende ao caos.
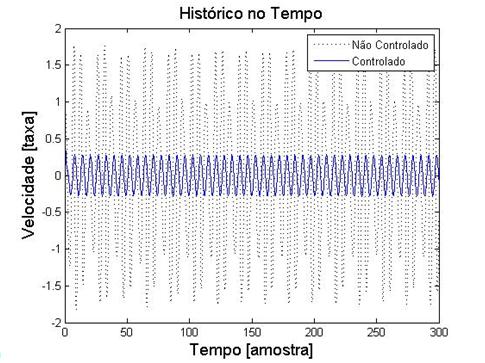
8 42 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) Deslocamento 2, velocidade 2 Nessas condições (Figura 4d), os coeficientes de Lyapunov se apresentaram de forma positiva em toda a evolução do tempo, isto evidencia que o comportamento dinâmico do sistema no decorrer do tempo tende ao caos. 4. PROJETO DE CONTROLE LINEAR ÓTIMO (LQR) É importante notar-se que na teoria do controle existem dois tipos de problemas: o controle de programa e a síntese do controle. Para o primeiro, a função do controle u(t) é encontrada como uma função do tempo, ou seja, nesse caso a função de controle ótimo determina uma trajetória ótima que corresponde a uma condição inicial dada do sistema. No segundo caso, a função de controle u(t,x) depende do tempo e de variáveis de estado. Este tipo de controle é chamado controle feedback, ou controle com realimentação, podendo ser aplicado para qualquer condição inicial. Se as variáveis do sistema são desvios do regime desejado, o controle ótimo estabiliza em torno da trajetória desejada, minimizando o funcional que caracteriza os desvios quadrados da trajetória e do controle do regime desejado Aplicação do controle no modelo proposto Aplicando a técnica do controle linear ótimo no modelo do sistema de equações 17, as equações do sistema controlado podem ser descritas da seguinte forma: x x U x aω (18) senωτ 2ξx xβx ehx e U Determina-se de forma iterativa os valores de Q er 1, e fixa-se valores para B 0,x ea, onde a controlabilidade do sistema é M B AB ABC ABCD 0, considerando então que o sistema dinâmico é controlável. A matriz P é obtida por: 1,8924 0,4142 P (19) 0,4142 1,3323 Resolvendo a equação algébrica de Riccati a função de controle ótimo u tem a seguinte forma: u 0,4142x 1,3323x (20) 4.2. Análise do sistema controlado para ω 0, 906 A Fig. 5 ilustra o comportamento do sistema controlado, através do histórico no tempo (deslocamento e velocidade) e Mapa de Poincaré para uma frequência de ω 0,906. Nas Figuras 5a e 5b, é possível observar novamente, que a amplitude teve uma considerável redução, quando comparado com o sistema sem controle. O sistema então se apresenta de forma estável e periódico, com a dominância de uma única frequência principal. No diagrama da Figura 5c, observa-se uma redução na orbita das trajetórias de velocidade, porém continua se comportando de forma periódica Análise do sistema controlado para ω 0, 996 A Fig. 6 ilustra o comportamento do sistema controlado, através do histórico no tempo (deslocamento e velocidade) e Mapa de Poincaré para uma frequência de ω 0,996. Nas Figuras 6a e 6b, é possível observar novamente, que a amplitude teve uma considerável redução, quando comparado com o sistema sem controle, além de sair de três picos distintos de velocidade e deslocamento para apenas um. Portanto é evidenciado um movimento periódico e estável, com somente uma frequência principal dominante.
, 35-45 (2018) 43")

 Plano de Fase. a) b) c) Fig.")
9 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) 43 a) b) c) Fig. 5. Comportamento da Estrutura Com Controle LQR. a) Deslocamento versus tempo, b) Velocidade versus tempo, c) Plano de Fase. a) b) c) Fig. 6. Comportamento da Estrutura Com Controle LQR. a) Deslocamento versus tempo, b) Velocidade versus tempo, c) Plano de Fase.
10 44 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) No diagrama da Figura 6c, observa-se que as trajetórias que antes tinham três períodos, após a implementação do controle, passam a se apresentar com apenas um período nas trajetórias, continuando a se comportar de forma periódica. 5. DISCUSSÕS E CONCLUSÕES Analisando o comportamento do sistema segundo as condições da tabela 1, observa-se que para a frequência ω 0,906, a oscilação acontece de forma periódica e estável. Nas simulações para frequência de ω 0,996, nota-se a ocorrência de três frequências dominantes distintas, mas que, segundo a análise de estabilidade estrutural, neste ponto a estabilidade é assintoticamente estável. Nas análises dos coeficientes de Lyapunov, observou-se que a variação da velocidade não interfere na variação dos autovalores, os valores de deslocamento e rigidez, interferem pouco nos expoentes, já que estão relacionados aos valores de H e δ, que tendem a 0 ou 1 conforme as condições impostas por x. O termo correspondente a folga adimensional e, interfere apenas na condição de impacto do sistema, através da relação com o deslocamento. Finalmente, observou-se através de simulações não apresentadas, que um fator de amortecimento ξ apresenta considerável influência na variação temporal dos expoentes de Lyapunov, pois é um termo independente no sistema de equações e que interfere diretamente na resposta dinâmica do sistema. Analisando o sistema como um todo, conclui-se que este tem comportamento periódico es estável segundo as considerações pontuais de estabilidades, mas apresenta indícios de caos segundo as avaliações temporais dos expoentes de Lyapunov. Para todas as condições inicias impostas no cálculo dos expoentes de Lyapunov, foi observado a ocorrência de caos no sistema. Portanto, a proposta principal deste trabalho, a partir deste ponto, é inserir um controlador linear ótimo (LQR) no sistema, afim de eliminar as instabilidades e manter a integridade do mecanismo. O controlador linear ótimo (LQR), se apresentou como boa alternativa de controle do sistema. Após sua implementação, para todas as condições testadas, houve uma considerável redução na amplitude de resposta da estrutura. Portanto, observa-se que o sistema controlado, em todas as situações, apresenta-se de forma estável, atendendo assim, a proposta de controle do trabalho. AGRADECIMENTOS Os autores agradecem ao Laboratório de Sistemas Complexos (SISPLEXOS) onde o projeto foi desenvolvido. REFERÊNCIAS BIBLIOGRÁFICAS [1] Aguiar, R.R., Desenvolvimento de um dispositivo gerador de vibro-impacto. Dissertação (Mestrado) Faculdade de Engenharia Mecânica, Pontifícia Universidade Católica.- PUC - Rio, Rio de Janeiro, Brasil (2006) [2] Beneveli, S.M.Á. Atenuação de vibrações em edifícios. Tese (Doutorado) - Faculdade de Engenharia Civil, Pontifícia Universidade Católica- PUC-Rio, Rio de Janeiro (2002) [3] Ing, J. et al., Experimental study of impact oscillator with one-sided elastic constraint, Philosophical Transactions of the Royal Society of London A: Mathematical, Physical and Engineering Sciences, 366(1866), (2008) [4] Kapitaniak, T., Chaotic oscillations in mechanical systems, Manchester University Press (1991) [5] Monteiro, L.H.A., Sistemas dinâmicos, São Paulo: Livraria da Física (2011) [6] Moraes, F.H., Comportamento dinâmico não-linear de um sistema mecânico com vibrações associadas a uma transição brusca na rigidez. Dissertação (Mestrado) Faculdade de Engenharia Mecânica, Universidade Estadual Paulista- UNESP, Bauru (2012) [7] Peterka, F., Vacik, J., Transition to chaotic motion in mechanical systems with impacts, Journal of Sound and Vibration, 154(1), (1992)
11 R.F. Borgues/ Revista Iberoamericana de Ingeniería Mecánica 22(1), (2018) 45 [8] Rao, S.S., Vibrações mecânicas, São Paulo, Pearson Prentice Hall (2012) SUPPRESSION OF CHAOS IN A VIBRATION - IMPACT SYSTEM USING THE LINEAR OPTIMAL CONTROL PROJECT Abstract Mechanical vibrations are common in engineering equipment and can be observed in the form of accelerations, displacements and speed. Mechanical vibrations, in most dynamic systems, are considered as unwanted and can be harmful. However, there are situations that are used to improve the operation and performance of machines. There are several causes of vibrations in engineering systems, in this work, the vibrations caused by impact are highlighted. When systems are impacting each other, they are characterized by vibro - impact systems. Various equipment with these characteristics can be mentioned, such as soil compacting rollers, impact hammers, soil drills, etc. In this work, the dynamic behavior of a vibro-impacting system is demonstrated. From the variation of the excitation frequency, the chaotic behavior was observed. Thus, the design of an optimal linear controller was developed to attenuate the vibrations in the operational regions in which the system is unstable. It has been shown that a good linear control strategy demonstrates this type of situation and can be used to reduce damages, avoiding economic losses, biological and material losses. Keywords: Stability analysis, Chaos, Optimal linear control, Numerical simulation, Mechanical vibrations.
UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA CÂMPUS DE ILHA SOLTEIRA RODRIGO FRANCISCO BORGES LOURENÇO
 UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA CÂMPUS DE ILHA SOLTEIRA RODRIGO FRANCISCO BORGES LOURENÇO ANÁLISE COMPUTACIONAL DO COMPORTAMENTO DINÂMICO DE UM SISTEMA VIBRO-IMPACTO
UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA CÂMPUS DE ILHA SOLTEIRA RODRIGO FRANCISCO BORGES LOURENÇO ANÁLISE COMPUTACIONAL DO COMPORTAMENTO DINÂMICO DE UM SISTEMA VIBRO-IMPACTO
CAPÍTULO. Purcina, Alcione Borges 1 ; Borges, Romes Antonio 2 ; Programa de Pós-Graduação em Modelagem e Otimização, Regional Catalão/ UFG
 14 CAPÍTULO ESTUDO NUMÉRICO E COMPUTACIONAL DE UM ABSORVEDOR DINÂMICO DE VIBRAÇÕES COM CARACTERÍSTICA NÃO LINEAR Purcina, Alcione Borges 1 ; Borges, Romes Antonio 2 ; 1 Programa de Pós-Graduação em Modelagem
14 CAPÍTULO ESTUDO NUMÉRICO E COMPUTACIONAL DE UM ABSORVEDOR DINÂMICO DE VIBRAÇÕES COM CARACTERÍSTICA NÃO LINEAR Purcina, Alcione Borges 1 ; Borges, Romes Antonio 2 ; 1 Programa de Pós-Graduação em Modelagem
VI Seminário da Pós-graduação em Engenharia Mecânica
 INFLUÊNCIA DA FREQUÊNCIA DE EXCITAÇÃO NA DINÂMICA NÃO-LINEAR DE UM SISTEMA VIBRO-IMPACTO Fernando de Haro Moraes Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof. Dr. Bento Rodrigues
INFLUÊNCIA DA FREQUÊNCIA DE EXCITAÇÃO NA DINÂMICA NÃO-LINEAR DE UM SISTEMA VIBRO-IMPACTO Fernando de Haro Moraes Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof. Dr. Bento Rodrigues
V Seminário da Pós-graduação em Engenharia Mecânica
 MODELAGEM, DINÂMICA E CONTROLE DE SISTEMA ELETROMECÂNICO SUJEITO A CONDIÇÃO DE IMPACTO Fernando de Haro Moraes Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof. Dr. Bento Rodrigues
MODELAGEM, DINÂMICA E CONTROLE DE SISTEMA ELETROMECÂNICO SUJEITO A CONDIÇÃO DE IMPACTO Fernando de Haro Moraes Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof. Dr. Bento Rodrigues
MODELAGEM E DINÂMICA DE UM DISPOSITIVO MICRO-ELETROMECÂNICO (MEMS). MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS).
. MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS).") MODELAGEM E DINÂMICA DE UM DISPOSITIVO MICRO-ELETROMECÂNICO (MEMS). MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS). Douglas Roca Santo 1, José Manoel Balthazar 2, Bento Rodrigues de Pontes
MODELAGEM E DINÂMICA DE UM DISPOSITIVO MICRO-ELETROMECÂNICO (MEMS). MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS). Douglas Roca Santo 1, José Manoel Balthazar 2, Bento Rodrigues de Pontes
Projeto de iniciação científica desenvolvido na UFFS campus Cerro Largo, PRO-ICT/UFFS 2
 ANÁLISE DA ESTABILIDADE DE UM PULVERIZADOR DE POMARES DO TIPO TORRE UTILIZANDO DIAGRAMAS DE BIFURCAÇÃO 1 ANALYSIS OF STABILITY OF A TOWER TYPE ORCHARD SPRAYER USING BIFURCATION DIAGRAMS Nadine Thiele 2,
ANÁLISE DA ESTABILIDADE DE UM PULVERIZADOR DE POMARES DO TIPO TORRE UTILIZANDO DIAGRAMAS DE BIFURCAÇÃO 1 ANALYSIS OF STABILITY OF A TOWER TYPE ORCHARD SPRAYER USING BIFURCATION DIAGRAMS Nadine Thiele 2,
Projeto de Controle de Caos Aplicado a uma Estrutura com Comportamento Caótico
 Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol. 5, N. 1, 217. Trabalho apresentado no CNMAC, Gramado - RS, 216. Proceeding Series of the Brazilian Society of Computational
Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol. 5, N. 1, 217. Trabalho apresentado no CNMAC, Gramado - RS, 216. Proceeding Series of the Brazilian Society of Computational
VII Seminário da Pós-graduação em Engenharia Mecânica
 INFLUÊNCIA DA RIGIDEZ E DA FONTE DE EXCITAÇÃO NA RESPOSTA DINÂMICA DE SISTEMA COM DESBALANCEAMENTO ROTATIVO Fabiano Gomes Madeira Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof.
INFLUÊNCIA DA RIGIDEZ E DA FONTE DE EXCITAÇÃO NA RESPOSTA DINÂMICA DE SISTEMA COM DESBALANCEAMENTO ROTATIVO Fabiano Gomes Madeira Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof.
Controle Semi Ativo de Caos em um Sistema de Amortecedor de Massa Sintonizado Acoplado a um Oscilador Linear e a uma Fonte de Excitação Não Ideal
 Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol. 4, N. 1, 216. Trabalho apresentado no DINCON, Natal - RN, 215. Proceeding Series of the Brazilian Society of Computational
Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol. 4, N. 1, 216. Trabalho apresentado no DINCON, Natal - RN, 215. Proceeding Series of the Brazilian Society of Computational
Controle de um Oscilador com Memória de Forma
 Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol. 4, N. 1, 216. Trabalho apresentado no DINCON, Natal - RN, 21. Proceeding Series of the Brazilian Society of Computational
Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol. 4, N. 1, 216. Trabalho apresentado no DINCON, Natal - RN, 21. Proceeding Series of the Brazilian Society of Computational
FEP Física para Engenharia II
 FEP96 - Física para Engenharia II Prova P - Gabarito. Uma plataforma de massa m está presa a duas molas iguais de constante elástica k. A plataforma pode oscilar sobre uma superfície horizontal sem atrito.
FEP96 - Física para Engenharia II Prova P - Gabarito. Uma plataforma de massa m está presa a duas molas iguais de constante elástica k. A plataforma pode oscilar sobre uma superfície horizontal sem atrito.
Análise de um Pêndulo Mecânico Não Ideal nas Principais Ressonâncias
 Análise de um Pêndulo Mecânico Não Ideal nas Principais Ressonâncias Adriana O. Dias, Masayoshi Tsuchida, Depto de Ciências de Computação e Estatística, IBILCE, UNESP, 15054-000, São José do Rio Preto,
Análise de um Pêndulo Mecânico Não Ideal nas Principais Ressonâncias Adriana O. Dias, Masayoshi Tsuchida, Depto de Ciências de Computação e Estatística, IBILCE, UNESP, 15054-000, São José do Rio Preto,
, (1) onde v é o módulo de v e b 1 e b 2 são constantes positivas.
 onde v é o módulo de v e b 1 e b 2 são constantes positivas.") Oscilações Amortecidas O modelo do sistema massa-mola visto nas aulas passadas, que resultou nas equações do MHS, é apenas uma idealização das situações mais realistas existentes na prática. Sempre que
Oscilações Amortecidas O modelo do sistema massa-mola visto nas aulas passadas, que resultou nas equações do MHS, é apenas uma idealização das situações mais realistas existentes na prática. Sempre que
Física 2 - Movimentos Oscilatórios. Em um ciclo da função seno ou cosseno, temos que são percorridos 2π rad em um período, ou seja, em T.
 Física 2 - Movimentos Oscilatórios Halliday Cap.15, Tipler Cap.14 Movimento Harmônico Simples O que caracteriza este movimento é a periodicidade do mesmo, ou seja, o fato de que de tempos em tempos o movimento
Física 2 - Movimentos Oscilatórios Halliday Cap.15, Tipler Cap.14 Movimento Harmônico Simples O que caracteriza este movimento é a periodicidade do mesmo, ou seja, o fato de que de tempos em tempos o movimento
Pequenas oscilações TÓPICOS FUNDAMENTAIS DE FÍSICA
 Pequenas oscilações 5 - Oscilações TÓPICOS FUNDAMENTAIS DE FÍSICA Aplicações em Acústica, espectros moleculares, vibrações em mecanismos, circuitos elétricos acoplados, etc. Se os desvios do equilíbrio
Pequenas oscilações 5 - Oscilações TÓPICOS FUNDAMENTAIS DE FÍSICA Aplicações em Acústica, espectros moleculares, vibrações em mecanismos, circuitos elétricos acoplados, etc. Se os desvios do equilíbrio
Física Geral e Experimental III
 Física Geral e Experimental III Oscilações Nosso mundo está repleto de oscilações, nas quais os objetos se movem repetidamente de um lado para outro. Eis alguns exemplos: - quando um taco rebate uma bola
Física Geral e Experimental III Oscilações Nosso mundo está repleto de oscilações, nas quais os objetos se movem repetidamente de um lado para outro. Eis alguns exemplos: - quando um taco rebate uma bola
Um Estudo da Dinâmica da Equação Logística
 Um Estudo da Dinâmica da Equação Logística Conconi, T.; Silva Lima, M.F. Resumo: Equações diferenciais são adequadas para representar sistemas discretos por grandezas cujos valores variam apenas em determinados
Um Estudo da Dinâmica da Equação Logística Conconi, T.; Silva Lima, M.F. Resumo: Equações diferenciais são adequadas para representar sistemas discretos por grandezas cujos valores variam apenas em determinados
V Seminário da Pós-graduação em Engenharia Mecânica
 ANÁLISE DE UM OSCILADOR NÃO LINEAR ACOPLADO A UM ABSORVEDOR TIPO SNAP THROUGH TRUSS (STTA) Willians Roberto Alves de Godoy Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof. Titular
ANÁLISE DE UM OSCILADOR NÃO LINEAR ACOPLADO A UM ABSORVEDOR TIPO SNAP THROUGH TRUSS (STTA) Willians Roberto Alves de Godoy Aluno do Programa de Pós-Graduação em Engenharia Mecânica Unesp Bauru Prof. Titular
6 Controlador de Estado
 6 Controlador de Estado Apresenta-se a seguir o método para implementação do sistema de controle por estados (Ogata, 1990). Considera-se agora o sistema representado em sua forma de estado: (25) cujo o
6 Controlador de Estado Apresenta-se a seguir o método para implementação do sistema de controle por estados (Ogata, 1990). Considera-se agora o sistema representado em sua forma de estado: (25) cujo o
3 Controle Passivo com Carregamento no Plano
 3 Controle Passivo com Carregamento no Plano 3.1. Conceitos Básicos Conforme visto no Capítulo 1, os mecanismos de controle passivo não são controláveis e não requerem energia para operar. Estes sistemas
3 Controle Passivo com Carregamento no Plano 3.1. Conceitos Básicos Conforme visto no Capítulo 1, os mecanismos de controle passivo não são controláveis e não requerem energia para operar. Estes sistemas
Considerações sobre a Condição Inicial na Construção do Diagrama de Bifurcação para o Mapa Logístico
 Trabalho apresentado no DINCON, Natal - RN, 2015. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics Considerações sobre a Condição Inicial na Construção do Diagrama de
Trabalho apresentado no DINCON, Natal - RN, 2015. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics Considerações sobre a Condição Inicial na Construção do Diagrama de
Uma Proposta para Controle de Velocidade de DFIG
 Uma Proposta para Controle de Velocidade de DFIG Camila M. V. Barros 1, Luciano S. Barros 1, Aislânia A. Araújo 1, Iguatemi E. Fonseca 1 1 Universidade Federal Rural do Semi-Árido (UFERSA) Mossoró RN Brasil
Uma Proposta para Controle de Velocidade de DFIG Camila M. V. Barros 1, Luciano S. Barros 1, Aislânia A. Araújo 1, Iguatemi E. Fonseca 1 1 Universidade Federal Rural do Semi-Árido (UFERSA) Mossoró RN Brasil
5. ANÁLISE NÃO LINEAR.
 5. ANÁLISE NÃO LINEAR. Após a análise linear, apresentada no capítulo anterior, este capítulo investiga a influência da não linearidade geométrica da estrutura no seu comportamento dinâmico sob cargas
5. ANÁLISE NÃO LINEAR. Após a análise linear, apresentada no capítulo anterior, este capítulo investiga a influência da não linearidade geométrica da estrutura no seu comportamento dinâmico sob cargas
UNIDADE 15 OSCILAÇÕES
 UNIDADE 15 OSCILAÇÕES 557 AULA 40 OSCILAÇÕES OBJETIVOS: - DEFINIR O CONCEITO DE OSCILAÇÃO; - CONHECER AS GRANDEZAS QUE DESCREVEM O MOVIMENTO. 40.1 Introdução: Há, na Natureza, um tipo de movimento muito
UNIDADE 15 OSCILAÇÕES 557 AULA 40 OSCILAÇÕES OBJETIVOS: - DEFINIR O CONCEITO DE OSCILAÇÃO; - CONHECER AS GRANDEZAS QUE DESCREVEM O MOVIMENTO. 40.1 Introdução: Há, na Natureza, um tipo de movimento muito
DINÂMICA DO SISTEMA CARRO-PÊNDULO
 DINÂMICA DO SISTEMA CARRO-PÊNDULO Rafael Alves Figueiredo 1 Universidade Federal de Uberlândia Av. João Naves de Ávila, 2121, Santa Mônica, Uberlândia, MG, Brasil. rafamatufu@yahoo.com.br Márcio José Horta
DINÂMICA DO SISTEMA CARRO-PÊNDULO Rafael Alves Figueiredo 1 Universidade Federal de Uberlândia Av. João Naves de Ávila, 2121, Santa Mônica, Uberlândia, MG, Brasil. rafamatufu@yahoo.com.br Márcio José Horta
Kátia Slodkowski Clerici 2, Cássio L. M. Belusso 3. Projeto de pesquisa PRO-ICT/UFFS 2. Acadêmica do curso de Física da UFFS Campus Cerro Largo 3
 DETECÇÃO DE COMPORTAMENTO REGULAR E CAÓTICO EM UM PULVERIZADOR DE POMARES TIPO TORRE UTILIZANDO DIAGRAMAS DE BIFURCAÇÃO 1 ON APPEARANCE OF REGULAR AND CHAOTIC BEHAVIOR ON THE TOWER ORCHARD SPRAYER USING
DETECÇÃO DE COMPORTAMENTO REGULAR E CAÓTICO EM UM PULVERIZADOR DE POMARES TIPO TORRE UTILIZANDO DIAGRAMAS DE BIFURCAÇÃO 1 ON APPEARANCE OF REGULAR AND CHAOTIC BEHAVIOR ON THE TOWER ORCHARD SPRAYER USING
UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA CAMPUS DE ILHA SOLTEIRA MARIA GABRIELLA RIBEIRO DOS REIS PEGAIANE
 UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA CAMPUS DE ILHA SOLTEIRA MARIA GABRIELLA RIBEIRO DOS REIS PEGAIANE OTIMIZANDO VIBRAÇÕES SÍSMICAS EM ESTRUTURAS ATRAVÉS DE CONTROLES
UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA CAMPUS DE ILHA SOLTEIRA MARIA GABRIELLA RIBEIRO DOS REIS PEGAIANE OTIMIZANDO VIBRAÇÕES SÍSMICAS EM ESTRUTURAS ATRAVÉS DE CONTROLES
5 Análise Dinâmica da Estabilidade
 5 Análise Dinâmica da Estabilidade Neste capítulo é analisado o comportamento dinâmico não-linear da torre estaiada, considerando os modelos apresentados nos capítulos anteriores. Especial atenção é dada
5 Análise Dinâmica da Estabilidade Neste capítulo é analisado o comportamento dinâmico não-linear da torre estaiada, considerando os modelos apresentados nos capítulos anteriores. Especial atenção é dada
CAPÍTULO. Gonçalves F., Rosane 1 *; Napoleão R., Marcos 2. Universidade Federal de Goiás. Universidade Federal de Goiás
 6 CAPÍTULO MODELAGEM MATEMÁTICA DE SISTEMAS MECÂNICOS: ANÁLISE VIBRATÓRIA Gonçalves F., Rosane 1 *; Napoleão R., Marcos 2 1 Universidade Federal de Goiás 2 Universidade Federal de Goiás * email: rosannymat@hotmail.com
6 CAPÍTULO MODELAGEM MATEMÁTICA DE SISTEMAS MECÂNICOS: ANÁLISE VIBRATÓRIA Gonçalves F., Rosane 1 *; Napoleão R., Marcos 2 1 Universidade Federal de Goiás 2 Universidade Federal de Goiás * email: rosannymat@hotmail.com
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA. 2ª Lista de SEL0417 Fundamentos de Controle.
 UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA ª Lista de SEL0417 undamentos de Controle Professor: Rodrigo Andrade Ramos Questão 1 Suponha que um satélite
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA ª Lista de SEL0417 undamentos de Controle Professor: Rodrigo Andrade Ramos Questão 1 Suponha que um satélite
MODELAGEM DE UM OSCILADOR NÃO LINEAR OBSERVADO NOS CURSOS DE FÍSICA BÁSICA.
 MODELAGEM DE UM OSCILADOR NÃO LINEAR OBSERVADO NOS CURSOS DE FÍSICA BÁSICA. 1 IFBA, campus Salvador. e-mail: rnaziazeno@ifba.edu.br 2 IFBA, campus Salvador. e-mail: nielsfl@ifba.edu.br 3 IFBA, campus Salvador.
MODELAGEM DE UM OSCILADOR NÃO LINEAR OBSERVADO NOS CURSOS DE FÍSICA BÁSICA. 1 IFBA, campus Salvador. e-mail: rnaziazeno@ifba.edu.br 2 IFBA, campus Salvador. e-mail: nielsfl@ifba.edu.br 3 IFBA, campus Salvador.
COMPORTAMENTO DINÂMICO NÃO- LINEAR DE UM SISTEMA MECÂNICO COM VIBRAÇÕES ASSOCIADAS A UMA TRANSIÇÃO BRUSCA NA RIGIDEZ
 UNIVERSIDADE ESTADUAL PAULISTA - UNESP FACULDADE DE ENGENHARIA - CAMPUS DE BAURU PROGRAMA DE PÓS-GRADUÇÃO EM ENGENHARIA MECÂNICA COMPORTAMENTO DINÂMICO NÃO- LINEAR DE UM SISTEMA MECÂNICO COM VIBRAÇÕES
UNIVERSIDADE ESTADUAL PAULISTA - UNESP FACULDADE DE ENGENHARIA - CAMPUS DE BAURU PROGRAMA DE PÓS-GRADUÇÃO EM ENGENHARIA MECÂNICA COMPORTAMENTO DINÂMICO NÃO- LINEAR DE UM SISTEMA MECÂNICO COM VIBRAÇÕES
DINÂMICA DE ESTRUTURAS E AEROELASTICIDADE
 DINÂMICA DE ESTRUTURAS E AEROELASTICIDADE Prof. GIL Aeroelasticidade - Introdução 1 Um Modelo Dinâmico Diferente... Equações de movimento de um sistema dinâmico: {,,, } [ ]{ (,,, )} [ ] ( ) M u x y z t
DINÂMICA DE ESTRUTURAS E AEROELASTICIDADE Prof. GIL Aeroelasticidade - Introdução 1 Um Modelo Dinâmico Diferente... Equações de movimento de um sistema dinâmico: {,,, } [ ]{ (,,, )} [ ] ( ) M u x y z t
Mecânismos A06. Prof. Nilton Ferruzzi. Prof. Nilton Ferruzzi 1
 Mecânismos A06 Prof. Nilton Ferruzzi Prof. Nilton Ferruzzi 1 Definição de Vibração Mecânica: É qualquer movimento que se repete, regular ou irregularmente, depois de um intervalo de tempo. O movimento
Mecânismos A06 Prof. Nilton Ferruzzi Prof. Nilton Ferruzzi 1 Definição de Vibração Mecânica: É qualquer movimento que se repete, regular ou irregularmente, depois de um intervalo de tempo. O movimento
CONTROLE ÓTIMO APLICADO NO CONTROLE DE VIBRAÇÕES DE SISTEMAS MECÂNICOS SUJEITOS A COMPORTAMENTO CAÓTICO
 XXIX ENCONRO NACIONAL DE ENGENHARIA DE PRODUÇÃO. Salvador, BA, Brasil, 06 a 09 de outubro de 009 CONROLE ÓIMO APLICADO NO CONROLE DE VIBRAÇÕES DE SISEMAS MECÂNICOS SUJEIOS A COMPORAMENO CAÓICO Angelo Marcelo
XXIX ENCONRO NACIONAL DE ENGENHARIA DE PRODUÇÃO. Salvador, BA, Brasil, 06 a 09 de outubro de 009 CONROLE ÓIMO APLICADO NO CONROLE DE VIBRAÇÕES DE SISEMAS MECÂNICOS SUJEIOS A COMPORAMENO CAÓICO Angelo Marcelo
5 Formulação Dinâmica Não Linear no Domínio da Frequência
 129 5 Formulação Dinâmica Não Linear no Domínio da Frequência No Capítulo 2, foram apresentadas as formulações para a análise dinâmica de estruturas reticuladas no domínio do tempo, sendo uma informação
129 5 Formulação Dinâmica Não Linear no Domínio da Frequência No Capítulo 2, foram apresentadas as formulações para a análise dinâmica de estruturas reticuladas no domínio do tempo, sendo uma informação
EVOLUÇÃO DO MOVIMENTO ROTACIONAL LIVRE DE TORQUES EXTERNOS NAS REGIÕES DE LIBRAÇÃO E CIRCULAÇÃO
 EVOLUÇÃO DO MOVIMENTO ROTACIONAL LIVRE DE TORQUES EXTERNOS NAS REGIÕES DE LIBRAÇÃO E CIRCULAÇÃO M.A.R.ALMEIDA 1, M.C.ZANARDI 1, W. R. SILVA², R. E. S. CABETTE 3 1. Faculdade de Engenharia de Guaratinguetá
EVOLUÇÃO DO MOVIMENTO ROTACIONAL LIVRE DE TORQUES EXTERNOS NAS REGIÕES DE LIBRAÇÃO E CIRCULAÇÃO M.A.R.ALMEIDA 1, M.C.ZANARDI 1, W. R. SILVA², R. E. S. CABETTE 3 1. Faculdade de Engenharia de Guaratinguetá
18 a 21 de novembro de 2014, Caldas Novas - Goiás ESTUDO DO COMPORTAMENTO DINÂMICO DA EQUAÇÃO DO BALANÇO DE UM SISTEMA DE ENERGIA
 8 a de novembro de 4, Caldas Novas - Goiás ESTUDO DO COMPORTAMENTO DINÂMICO DA EQUAÇÃO DO BALANÇO DE UM SISTEMA DE ENERGIA Felipe Alves Rubio, felipearubio@gmail.com Fábio Roberto Chavarette, fabioch@mat.feis.unesp.br
8 a de novembro de 4, Caldas Novas - Goiás ESTUDO DO COMPORTAMENTO DINÂMICO DA EQUAÇÃO DO BALANÇO DE UM SISTEMA DE ENERGIA Felipe Alves Rubio, felipearubio@gmail.com Fábio Roberto Chavarette, fabioch@mat.feis.unesp.br
ESTUDO DO COMPORTAMENTO DE UM SÓLIDO ELÁSTICO-LINEAR TRANSVERSALMENTE ISOTRÓPICO VIA MHA E VIA MEF
 ISSN 1809-5860 ESTUDO DO COMPORTAMENTO DE UM SÓLIDO ELÁSTICO-LINEAR TRANSVERSALMENTE ISOTRÓPICO VIA MA E VIA MEF Edmar Borges Theóphilo Prado 1 & Adair Roberto Aguiar 2 Resumo Neste trabalho utiliza-se
ISSN 1809-5860 ESTUDO DO COMPORTAMENTO DE UM SÓLIDO ELÁSTICO-LINEAR TRANSVERSALMENTE ISOTRÓPICO VIA MA E VIA MEF Edmar Borges Theóphilo Prado 1 & Adair Roberto Aguiar 2 Resumo Neste trabalho utiliza-se
COMPARAÇÃO DE TÉCNICAS DE CONTROLE APLICADAS A UM SISTEMA DE LEVITAÇÃO MAGNÉTICA
 Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol., N., 04. rabalho apresentado no CMAC-Sul, Curitiba-PR, 04. COMPARAÇÃO DE ÉCNICAS DE CONROLE APLICADAS A UM SISEMA
Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, Vol., N., 04. rabalho apresentado no CMAC-Sul, Curitiba-PR, 04. COMPARAÇÃO DE ÉCNICAS DE CONROLE APLICADAS A UM SISEMA
Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC
 Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC Ederson Costa dos Santos 1, Leandro Barjonas da Cruz Rodrigues 1, André Maurício Damasceno Ferreira 2 1
Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC Ederson Costa dos Santos 1, Leandro Barjonas da Cruz Rodrigues 1, André Maurício Damasceno Ferreira 2 1
As Oscilações estão presentes no nosso dia a dia como o vento que balança uma linha de transmissão elétrica, as vibrações da membrana de um
 As Oscilações estão presentes no nosso dia a dia como o vento que balança uma linha de transmissão elétrica, as vibrações da membrana de um alto-falante, ou de um instrumento de percussão. Um terremoto
As Oscilações estão presentes no nosso dia a dia como o vento que balança uma linha de transmissão elétrica, as vibrações da membrana de um alto-falante, ou de um instrumento de percussão. Um terremoto
2Equation Chapter 2 Section 1 AMORTECEDOR MAGNETOREOLÓGICO.
 2Equation Chapter 2 Section 1 AMORTECEDOR MAGNETOREOLÓGICO. 2.1. AMORTECEDOR MAGNETOREOLÓGICO (MR) Amortecedores magnetoreológicos (MR) têm recebido considerável atenção nos últimos anos já que oferecem
2Equation Chapter 2 Section 1 AMORTECEDOR MAGNETOREOLÓGICO. 2.1. AMORTECEDOR MAGNETOREOLÓGICO (MR) Amortecedores magnetoreológicos (MR) têm recebido considerável atenção nos últimos anos já que oferecem
Projeto de pesquisa realizado no curso de Engenharia Elétrica da Unijuí, junto ao GAIC (Grupo de Automação Industrial e Controle) 2
 2") MODELAGEM MATEMÁTICA DE PLATAFORMA EXPERIMENTAL PARA SIMULAÇÃO DE AERONAVE MULTIRROTORA 1 MATHEMATICAL MODELLING OF EXPERIMENTAL PLATFORM FOR SIMULATION OF MULTIROTOR AIRCRAFT Christopher Sauer 2, Manuel
MODELAGEM MATEMÁTICA DE PLATAFORMA EXPERIMENTAL PARA SIMULAÇÃO DE AERONAVE MULTIRROTORA 1 MATHEMATICAL MODELLING OF EXPERIMENTAL PLATFORM FOR SIMULATION OF MULTIROTOR AIRCRAFT Christopher Sauer 2, Manuel
DINÂMICA DE CONTATO: O PÊNDULO COM RESTRIÇÕES AO MOVIMENTO
 INPE-37-PRE/894 DINÂMICA DE CONTATO: O PÊNDUO COM RESTRIÇÕES AO MOVIMENTO Michelle Bararuá Dias* *Bolsista EEI Relatório Final de Projeto de Iniciação Científica (PIBIC/CNPq/INPE), orientado pelo Dr. André
INPE-37-PRE/894 DINÂMICA DE CONTATO: O PÊNDUO COM RESTRIÇÕES AO MOVIMENTO Michelle Bararuá Dias* *Bolsista EEI Relatório Final de Projeto de Iniciação Científica (PIBIC/CNPq/INPE), orientado pelo Dr. André
Modelagem Matemática de Elementos Empregados em Suspensões Veiculares
 Trabalho apresentado no CMAC-Sul, Curitiba-PR, 214. Modelagem Matemática de Elementos Empregados em Suspensões Veiculares Ana P. Brezolin, Márcia F. Brondani, Marnei D. Zorzella, Mauri J. Klein, Rodrigo
Trabalho apresentado no CMAC-Sul, Curitiba-PR, 214. Modelagem Matemática de Elementos Empregados em Suspensões Veiculares Ana P. Brezolin, Márcia F. Brondani, Marnei D. Zorzella, Mauri J. Klein, Rodrigo
AULA 3. CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Teoria de Sistemas Lineares
 Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
8 Análise de Vibração Forçada Caminhar Humano 8.1 Considerações iniciais
 8 Análise de Vibração Forçada Caminhar Humano 8.1 Considerações iniciais Neste capítulo, verifica-se o comportamento dinâmico de pisos mistos submetidos a excitações dinâmicas associadas ao caminhar humano,
8 Análise de Vibração Forçada Caminhar Humano 8.1 Considerações iniciais Neste capítulo, verifica-se o comportamento dinâmico de pisos mistos submetidos a excitações dinâmicas associadas ao caminhar humano,
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA. SUBÁREA: Engenharias
 TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
-GNE219 - Controle em Espaço de Estados
 Universidade Federal de Lavras Departamento de Engenharia -GNE219 - Controle em Espaço de Estados Prof. Daniel Leite E-mail: daniel.leite@deg.ufla.br 2/2017 1/27 Considerações Eng. de Controle e Automação
Universidade Federal de Lavras Departamento de Engenharia -GNE219 - Controle em Espaço de Estados Prof. Daniel Leite E-mail: daniel.leite@deg.ufla.br 2/2017 1/27 Considerações Eng. de Controle e Automação
MOVIMENTO OSCILATÓRIO
 MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
Física para Engenharia II - Prova P a (cm/s 2 ) -10
 -10") 4320196 Física para Engenharia II - Prova P1-2012 Observações: Preencha todas as folhas com o seu nome, número USP, número da turma e nome do professor. A prova tem duração de 2 horas. Não somos responsáveis
4320196 Física para Engenharia II - Prova P1-2012 Observações: Preencha todas as folhas com o seu nome, número USP, número da turma e nome do professor. A prova tem duração de 2 horas. Não somos responsáveis
Métodos Experimentais para Vibrações Mecânicas
 Métodos Experimentais Métodos Experimentais para Vibrações Mecânicas Prof. Aline Souza de Paula Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Mecânica Introdução A maioria
Métodos Experimentais Métodos Experimentais para Vibrações Mecânicas Prof. Aline Souza de Paula Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Mecânica Introdução A maioria
RESPOSTAS CAÓTICAS EM UM SISTEMA ELETRO-MECÂNICO NÃO IDEAL
 RESPOSTAS CAÓTICAS EM UM SISTEMA ELETRO-MECÂNICO NÃO IDEAL Débora Belato DPM, Faculdade de Engenharia Mecânica, UNICAMP, C.P. 6, CEP 383-97, Campinas, SP, Brasil. E-mail: belato@fem.unicamp.br. Hans Ingo
RESPOSTAS CAÓTICAS EM UM SISTEMA ELETRO-MECÂNICO NÃO IDEAL Débora Belato DPM, Faculdade de Engenharia Mecânica, UNICAMP, C.P. 6, CEP 383-97, Campinas, SP, Brasil. E-mail: belato@fem.unicamp.br. Hans Ingo
4 Cálculo de Equivalentes Dinâmicos
 4 Cálculo de Equivalentes Dinâmicos 4.1. Introdução Os sistemas de potência interligados vêm adquirindo maior tamanho e complexidade, aumentando a dependência de sistemas de controle tanto em operação
4 Cálculo de Equivalentes Dinâmicos 4.1. Introdução Os sistemas de potência interligados vêm adquirindo maior tamanho e complexidade, aumentando a dependência de sistemas de controle tanto em operação
Caos. Apresentado na disciplina Mecânica Cássica (PGF 5005) IFUSP. Iberê L. Caldas
 IFUSP. Iberê L. Caldas") Caos Iberê L. Caldas Apresentado na disciplina Mecânica Cássica (PGF 5005) IFUSP Caos na Mecânica Clássica Criação da Mecânica. Determinismo. Sensibilidade às condições iniciais. Indeterminismo clássico.
Caos Iberê L. Caldas Apresentado na disciplina Mecânica Cássica (PGF 5005) IFUSP Caos na Mecânica Clássica Criação da Mecânica. Determinismo. Sensibilidade às condições iniciais. Indeterminismo clássico.
Prof. MSc. David Roza José -
 1/11 2/11 Em diversos sistemas mecânicos, amortecedores de Coulomb ou de atrito seco são utilizados devido à simplicidade mecânica e conveniência. Em estruturas vibratórias, quando componentes apresentam
1/11 2/11 Em diversos sistemas mecânicos, amortecedores de Coulomb ou de atrito seco são utilizados devido à simplicidade mecânica e conveniência. Em estruturas vibratórias, quando componentes apresentam
ANÁLISE E COMPARAÇÃO DE DINÂMICAS PARA TRANSFERÊNCIAS ORBITAIS NO SISTEMA TERRA-LUA
 11 ANÁLISE E COMPARAÇÃO DE DINÂMICAS PARA TRANSFERÊNCIAS ORBITAIS NO SISTEMA TERRA-LUA ANALYSIS AND COMPARISON OF DYNAMICS FOR ORBITAL TRANSFERS IN THE EARTH-MOON SYSTEM Anderson Rodrigo Barretto Teodoro
11 ANÁLISE E COMPARAÇÃO DE DINÂMICAS PARA TRANSFERÊNCIAS ORBITAIS NO SISTEMA TERRA-LUA ANALYSIS AND COMPARISON OF DYNAMICS FOR ORBITAL TRANSFERS IN THE EARTH-MOON SYSTEM Anderson Rodrigo Barretto Teodoro
FUNDAMENTOS DE CONTROLE - EEL 7531
 Soluções periódicas e ciclos limite Funções descritivas FUNDAMENTOS DE CONTROLE - EEL 7531 Professor: Aguinaldo S. e Silva LABSPOT-EEL-UFSC 9 de junho de 2015 Professor: Aguinaldo S. e Silva FUNDAMENTOS
Soluções periódicas e ciclos limite Funções descritivas FUNDAMENTOS DE CONTROLE - EEL 7531 Professor: Aguinaldo S. e Silva LABSPOT-EEL-UFSC 9 de junho de 2015 Professor: Aguinaldo S. e Silva FUNDAMENTOS
SEM Sistemas de Controle Aula 1 - Introdução
 SEM 5928 - Sistemas de Controle Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 5928 - Sistemas de Controle Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
Figura 1.1: Diagrama esquemático ilustrando o sistema do problema.
 Figura 1.1: Diagrama esquemático ilustrando o sistema do problema. 1 Exemplos 1.1 Um bloco, preso firmemente a uma mola, oscila verticalmente uma frequência de 4 Hertz e uma amplitude de 7 centímetros.
Figura 1.1: Diagrama esquemático ilustrando o sistema do problema. 1 Exemplos 1.1 Um bloco, preso firmemente a uma mola, oscila verticalmente uma frequência de 4 Hertz e uma amplitude de 7 centímetros.
Analisa-se agora o comportamento dinâmico da estrutura sob uma carga harmônica vertical da forma:
 5 Vibração Forçada 5.1 Equações de movimento com carga harmônica Analisa-se agora o comportamento dinâmico da estrutura sob uma carga harmônica vertical da forma: = (Ω ), (5.1) onde é a magnitude da força
5 Vibração Forçada 5.1 Equações de movimento com carga harmônica Analisa-se agora o comportamento dinâmico da estrutura sob uma carga harmônica vertical da forma: = (Ω ), (5.1) onde é a magnitude da força
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA MECÂNICA
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA MECÂNICA DESENVOLVIMENTO DE UMA ROTINA COMPUTACIONAL PARA DETERMINAÇÃO DA RESPOSTA DINÂMICA DE ESTRUTURAS por
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA MECÂNICA DESENVOLVIMENTO DE UMA ROTINA COMPUTACIONAL PARA DETERMINAÇÃO DA RESPOSTA DINÂMICA DE ESTRUTURAS por
Controle de Vibrações de uma Viga de Material Compósito Utilizando Desigualdades Matriciais Lineares
 https://eventos.utfpr.edu.br//sicite/sicite2017/index Controle de Vibrações de uma Viga de Material Compósito Utilizando Desigualdades Matriciais Lineares RESUMO Willian Faria dos Santos wfsantos92@hotmail.com
https://eventos.utfpr.edu.br//sicite/sicite2017/index Controle de Vibrações de uma Viga de Material Compósito Utilizando Desigualdades Matriciais Lineares RESUMO Willian Faria dos Santos wfsantos92@hotmail.com
Nota de Aula: Equações Diferenciais Ordinárias de 2 Ordem. ( Aplicações )
") Nota de Aula: Equações Diferenciais Ordinárias de Ordem ( Aplicações ) Vamos nos ater a duas aplicações de grande interesse na engenharia: Sistema massa-mola-amortecedor ( Oscilador Mecânico ) O Sistema
Nota de Aula: Equações Diferenciais Ordinárias de Ordem ( Aplicações ) Vamos nos ater a duas aplicações de grande interesse na engenharia: Sistema massa-mola-amortecedor ( Oscilador Mecânico ) O Sistema
Síntese do Controle Linear Aplicado em Sistemas Populacionais 1
 TEMA Tend. Mat. Apl. Comput., 6, No. 1 (2005), 153-162. c Uma Publicação da Sociedade Brasileira de Matemática Aplicada e Computacional. Síntese do Controle Linear Aplicado em Sistemas Populacionais 1
TEMA Tend. Mat. Apl. Comput., 6, No. 1 (2005), 153-162. c Uma Publicação da Sociedade Brasileira de Matemática Aplicada e Computacional. Síntese do Controle Linear Aplicado em Sistemas Populacionais 1
Aluno Data Curso / Turma Professor
 Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
4 METODOLOGIA E RESULTADOS EXPERIMENTAIS
 4 METODOLOGIA E RESULTADOS EXPERIMENTAIS Neste capítulo, serão descritas a bancada sobre a qual foram desenvolvidos os ensaios experimentais, as considerações na aquisição e processamento dos sinais e
4 METODOLOGIA E RESULTADOS EXPERIMENTAIS Neste capítulo, serão descritas a bancada sobre a qual foram desenvolvidos os ensaios experimentais, as considerações na aquisição e processamento dos sinais e
AMORTECIMENTOS SUBCRÍTICO, CRÍTICO E
 AMORTECIMENTOS SUBCRÍTICO, CRÍTICO E SUPERCRÍTICO Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 20 de março de 2013 Roteiro 1 Amortecidas forçadas Roteiro Amortecidas forçadas 1 Amortecidas
AMORTECIMENTOS SUBCRÍTICO, CRÍTICO E SUPERCRÍTICO Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 20 de março de 2013 Roteiro 1 Amortecidas forçadas Roteiro Amortecidas forçadas 1 Amortecidas
Movimento Harmônico Simples e Amortecido
 Movimento Harmônico Simples e Amortecido INTRODUÇÃO Ana Arruda, Caio Monteiro, Lineu Parra, Vitor Rocha Professor: Marcelo Reyes, CMCC Campus Santo André Resumo O estudo dos Movimentos Harmônicos permite
Movimento Harmônico Simples e Amortecido INTRODUÇÃO Ana Arruda, Caio Monteiro, Lineu Parra, Vitor Rocha Professor: Marcelo Reyes, CMCC Campus Santo André Resumo O estudo dos Movimentos Harmônicos permite
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I INFORMAÇÕES GERAIS. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I INFORMAÇÕES GERAIS Prof. Bruno Farias Arquivo em anexo Conteúdo Programático Bibliografia
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I INFORMAÇÕES GERAIS Prof. Bruno Farias Arquivo em anexo Conteúdo Programático Bibliografia
Universidade Federal de São Paulo Instituto de Ciência e Tecnologia Bacharelado em Ciência e Tecnologia
 Universidade Federal de São Paulo Instituto de Ciência e Tecnologia Bacharelado em Ciência e Tecnologia Oscilações Movimento Oscilatório Cinemática do Movimento Harmônico Simples (MHS) MHS e Movimento
Universidade Federal de São Paulo Instituto de Ciência e Tecnologia Bacharelado em Ciência e Tecnologia Oscilações Movimento Oscilatório Cinemática do Movimento Harmônico Simples (MHS) MHS e Movimento
Quarta Lista de Exercícios (data de entrega: 11/05/2018)
") Quarta Lista de Exercícios (data de entrega: 11/05/018) 1. A partir da análise do modelo de Hodgkin-Huxley no plano de fase rápido-lento (veja a aula 1), FitzHugh propôs um modelo bi-dimensional muito
Quarta Lista de Exercícios (data de entrega: 11/05/018) 1. A partir da análise do modelo de Hodgkin-Huxley no plano de fase rápido-lento (veja a aula 1), FitzHugh propôs um modelo bi-dimensional muito
Prof. Dr. Ronaldo Rodrigues Pelá. 3 de abril de 2013
 OSCILAÇÕES FORÇADAS Mecânica II (FIS-6) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 3 de abril de 013 Roteiro 1 Forçadas Roteiro 1 Resultado M: 66 DP: 0 Conceito N L 3 MB 4 B 7 R 3 I 1 D 5 Roteiro Forçadas
OSCILAÇÕES FORÇADAS Mecânica II (FIS-6) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 3 de abril de 013 Roteiro 1 Forçadas Roteiro 1 Resultado M: 66 DP: 0 Conceito N L 3 MB 4 B 7 R 3 I 1 D 5 Roteiro Forçadas
Utilização do solidthinking Embed em projetos de controle para sistemas embarcados utilizando técnica de controle adaptativo por modelo de referência.
 Utilização do solidthinking Embed em projetos de controle para sistemas embarcados utilizando técnica de controle adaptativo por modelo de referência. Rodrigo de J. Macedo Resumo Apresenta-se, neste artigo,
Utilização do solidthinking Embed em projetos de controle para sistemas embarcados utilizando técnica de controle adaptativo por modelo de referência. Rodrigo de J. Macedo Resumo Apresenta-se, neste artigo,
Oscilações II. Estudo: Pêndulo Simples Oscilador Forçado Ressonância
 Oscilações II Estudo: Pêndulo Simples Oscilador Forçado Ressonância Oscilações - Pêndulo Considere um corpo de massa m, presso a extremidade livre de um fio inextensível de comprimento L, como indicado
Oscilações II Estudo: Pêndulo Simples Oscilador Forçado Ressonância Oscilações - Pêndulo Considere um corpo de massa m, presso a extremidade livre de um fio inextensível de comprimento L, como indicado
Universidade Federal Rural do Semi Árido UFERSA Pro Reitoria de Graduação PROGRAD Disciplina: Física II Professora: Subênia Medeiros
 Universidade Federal Rural do Semi Árido UFERSA Pro Reitoria de Graduação PROGRAD Disciplina: Física II Professora: Subênia Medeiros Movimento Periódico O movimento é um dos fenômenos mais fundamentais
Universidade Federal Rural do Semi Árido UFERSA Pro Reitoria de Graduação PROGRAD Disciplina: Física II Professora: Subênia Medeiros Movimento Periódico O movimento é um dos fenômenos mais fundamentais
Sistemas Dinâmicos Lineares
 Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Prof. MSc. David Roza José -
 1/16 2/16 Sistema Amortecido sob Movimento Harmônico da Base Algumas vezes a base ou suporte de um sistema massa-mola-amortecedor apresenta movimento harmônico, conforme mostrado. Seja então y(t) o deslocamento
1/16 2/16 Sistema Amortecido sob Movimento Harmônico da Base Algumas vezes a base ou suporte de um sistema massa-mola-amortecedor apresenta movimento harmônico, conforme mostrado. Seja então y(t) o deslocamento
Oscilações. Movimento Harmônico Simples. Guia de Estudo (Formato para Impressão):
:") Page 1 of 6 Oscilações Guia de Estudo (Formato para Impressão): Após o estudo deste tópico você deve: Entender os conceitos de Frequência, Período, Amplitude e Constante de Fase; Conhecer e saber resolver
Page 1 of 6 Oscilações Guia de Estudo (Formato para Impressão): Após o estudo deste tópico você deve: Entender os conceitos de Frequência, Período, Amplitude e Constante de Fase; Conhecer e saber resolver
AUTOVALORES E AUTOVETORES: CONCEITOS E UMA APLICAÇÃO A UM SISTEMA DINÂMICO
 AUTOVALORES E AUTOVETORES: CONCEITOS E UMA APLICAÇÃO A UM SISTEMA DINÂMICO Patrícia Eduarda de Lima 1, Luciane de Fátima Rodrigues de Souza 2* 1 Departamento de Exatas, Faculdades Integradas Regionais
AUTOVALORES E AUTOVETORES: CONCEITOS E UMA APLICAÇÃO A UM SISTEMA DINÂMICO Patrícia Eduarda de Lima 1, Luciane de Fátima Rodrigues de Souza 2* 1 Departamento de Exatas, Faculdades Integradas Regionais
EXPERIÊNCIA M003-3 PÊNDULO SIMPLES
 UFSC - CFM DEPTO. DE FÍSICA FÍSICA EXPERIMENTAL I - FSC 5122 1 - OBJETIVOS EXPERIÊNCIA M003-3 PÊNDULO SIMPLES a) Medir a aceleração da gravidade local. b) Identificar o equipamento e entender seu funcionamento.
UFSC - CFM DEPTO. DE FÍSICA FÍSICA EXPERIMENTAL I - FSC 5122 1 - OBJETIVOS EXPERIÊNCIA M003-3 PÊNDULO SIMPLES a) Medir a aceleração da gravidade local. b) Identificar o equipamento e entender seu funcionamento.
Influência do controle de vibrações em um pórtico simples usando um amortecedor de massa ativa (AMD)
") Influência do controle de vibrações em um pórtico simples usando um amortecedor de massa ativa (AMD Influence of the vibration control in a portal frame using active mass damper (AMD Danielli Duó Universidade
Influência do controle de vibrações em um pórtico simples usando um amortecedor de massa ativa (AMD Influence of the vibration control in a portal frame using active mass damper (AMD Danielli Duó Universidade
Prova P3 Física para Engenharia II, turma nov. 2014
 Questão 1 Imagine que você prenda um objeto de 5 g numa mola cuja constante elástica vale 4 N/m. Em seguida, você o puxa, esticando a mola, até 5 cm da sua posição de equilíbrio, quando então o joga com
Questão 1 Imagine que você prenda um objeto de 5 g numa mola cuja constante elástica vale 4 N/m. Em seguida, você o puxa, esticando a mola, até 5 cm da sua posição de equilíbrio, quando então o joga com
Oscilador harmônico: uma análise via séries de Fourier 1
 arxiv:1309.7918v1 [physics.gen-ph] 30 Sep 2013 Oscilador harmônico: uma análise via séries de Fourier 1 (Harmonic oscillator: an analysis via Fourier series) A.S. de Castro 2 Departamento de Física e Química,
arxiv:1309.7918v1 [physics.gen-ph] 30 Sep 2013 Oscilador harmônico: uma análise via séries de Fourier 1 (Harmonic oscillator: an analysis via Fourier series) A.S. de Castro 2 Departamento de Física e Química,
Danny Hernán Zambrano Carrera. Movimento de Rotação Sem Restrição de um Corpo Rígido. Tese de Doutorado
 Danny Hernán Zambrano Carrera Movimento de Rotação Sem Restrição de um Corpo Rígido Tese de Doutorado Tese apresentada como requisito parcial para obtenção do título de Doutor pelo Programa de Pós- Graduação
Danny Hernán Zambrano Carrera Movimento de Rotação Sem Restrição de um Corpo Rígido Tese de Doutorado Tese apresentada como requisito parcial para obtenção do título de Doutor pelo Programa de Pós- Graduação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL
 DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
Curso de Complementos de Física
 Aula 2 Curso de Engenharia Civil Faculdade Campo Grande 27 de Agosto de 2015 Plano de Aula 1 Exemplo 1 Um bloco, preso firmemente a uma mola, oscila verticalmente uma frequência de 4 Hertz e uma amplitude
Aula 2 Curso de Engenharia Civil Faculdade Campo Grande 27 de Agosto de 2015 Plano de Aula 1 Exemplo 1 Um bloco, preso firmemente a uma mola, oscila verticalmente uma frequência de 4 Hertz e uma amplitude
QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4)
") [0000]-p1/6 QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4) ando necessário, use π = 3, 14, g=10 m/s 2. Respostas da questões por versão de prova: E7Hx: (1) A; (2) E; (3) A; (4) E; 112F: (1) E; (2) B; (3) D; (4) B;
[0000]-p1/6 QUESTÕES DE MÚLTIPLA-ESCOLHA (1-4) ando necessário, use π = 3, 14, g=10 m/s 2. Respostas da questões por versão de prova: E7Hx: (1) A; (2) E; (3) A; (4) E; 112F: (1) E; (2) B; (3) D; (4) B;
Dinâmica de um metrónomo básico
 Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
UMA PROPOSTA DE DECOMPOSIÇÃO DE SISTEMAS LINEARES PARA DMPC
 UMA PROPOSTA DE DECOMPOSIÇÃO DE SISTEMAS LINEARES PARA DMPC R. R. ROCHA 1 e L. C. OLIVEIRA-LOPES 1 1 Universidade Federal de Uberlândia, Faculdade de Engenharia Química E-mail para contato: rosi.rocha28@gmail.com;
UMA PROPOSTA DE DECOMPOSIÇÃO DE SISTEMAS LINEARES PARA DMPC R. R. ROCHA 1 e L. C. OLIVEIRA-LOPES 1 1 Universidade Federal de Uberlândia, Faculdade de Engenharia Química E-mail para contato: rosi.rocha28@gmail.com;
Ações de controle básicas: uma análise do desempenho em regime
 Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
FEP Física para Engenharia II
 FEP2196 - Física para Engenharia II Prova P1-25/10/2007 - Gabarito 1. Um corpo de massa 50 g está preso a uma mola de constante k = 20 N/m e oscila, inicialmente, livremente. Esse oscilador é posteriormente
FEP2196 - Física para Engenharia II Prova P1-25/10/2007 - Gabarito 1. Um corpo de massa 50 g está preso a uma mola de constante k = 20 N/m e oscila, inicialmente, livremente. Esse oscilador é posteriormente
Capí tulo 6 Movimento Oscilato rio Harmo nico
 Capí tulo 6 Movimento Oscilato rio Harmo nico 1. O Movimento Harmónico Simples Vamos estudar o movimento de um corpo sujeito a uma força elástica. Consideramos o sistema como constituído por um corpo de
Capí tulo 6 Movimento Oscilato rio Harmo nico 1. O Movimento Harmónico Simples Vamos estudar o movimento de um corpo sujeito a uma força elástica. Consideramos o sistema como constituído por um corpo de
Figura 1. Modelo de 1/4 de
 ESTUDO E SIMULAÇÃO DE CONTROLE DE SUSPENSÃO ATIVA PARA MODELOS DE UM QUARTO DE CARRO E CARRO INTEIRO STUDY AND SIMULATION OF ACTIVE SUSPENSION CONTROLLERS FOR QUARTER-CAR MODELS AND FULL-CAR MODELS Rafael
ESTUDO E SIMULAÇÃO DE CONTROLE DE SUSPENSÃO ATIVA PARA MODELOS DE UM QUARTO DE CARRO E CARRO INTEIRO STUDY AND SIMULATION OF ACTIVE SUSPENSION CONTROLLERS FOR QUARTER-CAR MODELS AND FULL-CAR MODELS Rafael
4 Modelo Linear de Quatro Graus de Liberdade
 4 Modelo Linear de Quatro Graus de Liberdade O modelo linear descrito em (Spinola, 2003) na forma de estado (11) representa um veículo de dois graus de liberdade: velocidade lateral em relação ao referencial
4 Modelo Linear de Quatro Graus de Liberdade O modelo linear descrito em (Spinola, 2003) na forma de estado (11) representa um veículo de dois graus de liberdade: velocidade lateral em relação ao referencial