Projeto, Simulação e Desenvolvimento de um Manipulador Robótico Acionado por Tendões
|
|
|
- Daniel Batista de Lacerda
- 6 Há anos
- Visualizações:
Transcrição
1 Julo Qudro de Mour Guede Projeto, Smulção e Deenvolvmento de um Mnpuldor Robóto Aondo por Tendõe Dertção de Metrdo Dertção preentd omo requto prl pr obtenção do gru de Metre pelo Progrm de Pó-Grdução em Engenr Meân do Deprtmento de Engenr Meân do Centro Téno Centífo d PUC-Ro Orentdor: Mro Antono Meggolro Ro de Jnero Abrl de
2 Julo Qudro de Mour Guede Projeto, Smulção e Deenvolvmento de um Mnpuldor Robóto Aondo por Tendõe Dertção preentd omo requto prl pr obtenção do gru de Metre pelo Progrm de Pó- Grdução em Engenr Meân do Deprtmento de Engenr Meân do Centro Téno Centífo d PUC- Ro Aprovd pel Comão Exmndor bxo nd Mro Antono Meggolro Orentdor Depto de Engenr Meân PUC-RJ Muro Spernz Neto Depto de Engenr Meân PUC-RJ Mrelo de Andrde Dreux Depto de Engenr Meân PUC-RJ Joé Eugêno Lel Coordendor Setorl do Centro Téno Centífo - PUC-Ro Ro de Jnero, 9 de Abrl de
3 Todo o dreto reervdo É probd reprodução totl ou prl do trblo em utorzção d unverdde, do utor e do orentdor Julo Qudro de Mour Guede Grduou-e em Engenr de Controle e Automção n PUC- Ro em, juntmente om o uro equenl de Empreendedormo pelo CCE, tmbém, n PUC-Ro em e epelzção em Engenr de Suprmento em Contrução e Montgem om foo n áre de Petróleo e Gá n UFF em 8 Bolt de Deenvolvmento Tenológo Indutrl do CNPq
4 Ao meu p, Julo e Sndr, mn epo, Domtl e o meu rmão Cml, Jon e Croln
5 Agrdemento Ao orentdor e mgo, Mro Antono Meggolro, por todo o poo, nentvo e omprometmento pr o deenvolvmento dete e de dvero outro trblo Ao profeore Muro Spernz Neto e Muro Swnke d Slv por tod orentção dêm dete o prmero período d grdução té o d tu Ao pdrno Pedro Ferrer d Cot Blo de A pel mzde, nentvo e uporte, tnto no momento peo qunto no dêmo Ao mgo d RoBotz, luno d grdução e pó-grdução que frequentm o Lbortóro de Engenr de Controle e Automção d PUC-RJ pelo nentvo À mn fmíl, em epel, à mn epo, por ompreender mn uên durnte ete período dêmo e Gerld Jerônmo de Mour pelo poo e orreçõe
6 Reumo Guede, Julo Q M: Meggolro, Mro Antono Projeto, Smulção e Deenvolvmento de um Mnpuldor Robóto Aondo por Tendõe Ro de Jnero RJ, p Dertção de Metrdo Deprtmento de Engenr Meân, Pontfí Unverdde Ctól do Ro de Jnero Um novo oneto de mnpuldor et endo etuddo om o ntuto de relzr tref nváve pr mnpuldore trdon Ete modelo de mnpuldor e be em mnpuldore ontínuo Ele preentm um etrutur mlr um olun vertebrl, ão ltmente modulre, leve, podem er tudo remotmente e pouem lto índe de dptbldde om o mbente Ete tpo de mnpuldor preent rterít nterente pr utlzção em dvero tpo de tref, prnplmente em npeçõe em lo om muto obtáulo e mbente nópto pr o ere umno Et dertção preent o deenvolvmento de um protótpo de mnpuldor ontínuo tudo remotmente por tendõe Ele pou etrutur modulr formdo por vértebr lgd erlmente Inlmente projetdo trvé de ferrment omputon pr em egud er ontruído fmente São preentdo etudo nemáto e mulçõe om omprçõe entre prte teór e expermentl Por fm, é deenvolvd um tução pr mulr tução do mnpuldor em um tref rel Plvr-Cve Mnpuldor ontínuo; tendõe; npeção; robót;
7 Abtrt Guede, Julo Q M: Meggolro, Mro Antono Degn, Smulton nd Development of Tendon Drve Robot Mnpultor Ro de Jnero RJ, p MS Dertton Menl Engneerng Deprtment, Pontfl Ctol Unverty of Ro de Jnero A new onept of robot mnpultor tuded to perform tk not vble for trdtonl mnpultor T new model bed on ontnuum mnpultor It truture mlr to bkbone, t gly modulr, lgtwegt, t n be remotely tuted, nd t g level of dptblty to te envronment T type of mnpultor nteretng feture for ue n vrou type of tk, epelly n npeton n ple wt mny obtle nd noptble to umn T te preent te development of remote tendon drve robot ontnuum mnpultor prototype It modulr truture ompoed of erlly onneted vertebre It ntlly degned by omputtonl tool, nd ten pylly bult Knemt tude nd multon re preented wt ompron between teoretl nd expermentl reult Fnlly, tuton preented to multe te performne of te mnpultor n rel tk Keyword Contnuum mnpultor; tendon; npeton; robot,
8 Sumáro Introdução Motvção Objetvo do Trblo 7 Revão Bblográf 7 Orgnzção do Trblo Conepção do Mnpuldor Coneto Báo Cálulo de Rgdez por Elemento Fnto Anále d Membrn Cálulo de Rgdez pr Vértebr Delomento no exo Z Delomento Rotonl Modelgem Teór 7 Coneto Báo de Cnemát 7 Trnformção Homogêne Notção de Denvt-Hrtenberg Modelgem do Stem Contrução e Montgem 69 Crterít do Mter 69 Contrução e Montgem 7 Expermento e Reultdo 8 6 Conluõe e Trblo Futuro 6 Contrbuçõe nete Trblo 6 Sugetõe pr trblo futuro 7 Bblogrf
9 8 Anexo 8 Anexo I 9 Anexo II Anexo III 8 Anexo IV Anexo V Anexo VI Anexo VII Anexo VIII
10 Lt de Fgur Fgur Robô Snke-Arm 6 Fgur Robô Crlotte 9 Fgur Robô MARS 9 Fgur Mnpuldor Trdonl x Contínuo Fgur Etrutur Bed em Mol 7 Fgur 6 Etrutur Bed em Junt Pneumát 7 Fgur 7 - Membrn 8 Fgur 8 - Colun 9 Fgur 9 - Anel 9 Fgur Corte Trnverl do Tendão Fgur Vértebr Fgur Elo Fgur Elo om Prfuo de Fxção Fgur Elo om Prfuo Fgur Servomotor AX- Fgur 6 Enoder e Relção de Engrengen Fgur 7 - Pol 6 Fgur 8 Be, Servomotor e Pol 7 Fgur 9 Poonmento do Servo 7 Fgur - Be 8 Fgur Mnpuldor Completo 9 Fgur Pgem de Tendõe Fgur Ml Gerd pr o Cálulo d Membrn Fgur Forç e Deformção o Cálulo d Membrn Fgur Ml Gerd pr o Cálulo d Vértebr Fgur 6 - Forç e Deformção do Sub-Item Fgur 7 - Forç e Deformção do Sub-Item Fgur 8 Poção e Orentção do Corpo Rígdo 7 Fgur 9 Trnformção Rotonl 8 Fgur Notção de Denvt-Hrtenberg
11 Fgur Defnção de, κ e φ 6 Fgur Adptção d Vértebr pr D-H 7 Fgur Vetore 6 Fgur Montgem do Stem pr Gerr Seção Corrugd 7 Fgur Membrn Norml (topo) x Corrugd (nferore) 7 Fgur 6 Anel Ante e Depo d Ungem 7 Fgur 7 Colun Ante e Depo d Ungem 7 Fgur 8 Vértebr Montd 7 Fgur 9 Detle d Termnção do Tendõe 7 Fgur Pl Be, Servo, Pol e Tendõe 7 Fgur - Mnpuldor Completo 76 Fgur Fção do Servomotor 77 Fgur Conexão Servomotore e Computdor 77 Fgur Comunção Servo Controldor 78 Fgur Interfe de Clbrção 8 Fgur 6 Poção Inl do Mnpuldor 8 Fgur 7 Tendõe no Elo Conegunte 8 Fgur 8 Tel Prnpl do Softwre de Controle 87 Fgur 9 Medçõe (Retedo e om ±,rd no Elo ) 89 Fgur Ml de Controle por Torque Computdo 9 Fgur Grvdde 9 Fgur Controle por Torque Computdo 9 Fgur Repot Smulção,rd 96 Fgur Ilutrção do Problem 96 Fgur Ângulo d Etp 98 Fgur 6 Ângulo d Etp 98 Fgur 7 Ângulo d Etp 99 Fgur 8 Etp Fgur 9 Etp Fgur 6 Etp Fgur 6 Ângulo Meddo
12 Lt de Tbel Tbel - Relção de Engrengen Tbel - Confgurção d Ml do Tete Tbel - Prâmetro x Tpo de Junt Tbel - Prâmetro de Denvt-Hrtenberg 8 Tbel - Erro no Pote Sttu 79 Tbel - Tx de Trnmão 8 Tbel - Pré-tenonmento do Tendõe 8 Tbel - Relção entre ID e Elo 86 Tbel - Vrçõe de θ 9 Tbel - Vrçõe de θ 9 Tbel - Entrd pr Relzção d Etp Tbel -6 Ângulo d Smulção
13 Lt de Símbolo e Abrevçõe CRIGOS Compt Robot for Imge Guded Ortoped Surgery D-H Notção de Denvt-Hrtenberg Delrn AF Aetl omopolymer PTFE-flled DoF Degree of Freedom END Eno Não Detrutvo FEP Etl-Propleno Fluordo ID Número de Identfção MARS MnAture Robot for Surgl proedure PTFE PolTetrFluorEtleno ROV Remoted Operted Vele
14 Introdução Atulmente, om needde do umento de produtvdde, do bxo uto de fbrção, do umento de produção erd, tendên que vem endo dotd pel ndútr é de utomtzr eu proeo Nee ontexto, Robót tem umdo um ppel prmordl em dver áre A Robót Indutrl é o etudo, deenvolvmento e uo de tem robóto pr fbrção, tete, mulção e npeção A plçõe típ de robô ndutr nluem fundção, pntur, oldgem, montgem, movmentção de rg, npeção, e relzção de tete, ombnndo preão, velodde, e robutez Outr rterít mportnte etá relond à nlubrdde em determndo trblo, onde e fz neeár utlzção de tem e ferrment epe pr relzção de tref Algun exemplo dee tem e detm: veíulo robóto pr medção e npeção de fl em equpmento, mnpuldore pr áre nópt e de dfíl eo, e ROV (Remoted Operted Vele) ubmrno pr lt profunddde mrítm e pn rdotv Motvção A tén de npeçõe não detrutv (tmbém oned omo END) ão utlzd n verfção de mter, equpmento e uprmento em le ur vr São muto utlzdo no etore energéto (petróleo, petroquímo, nuler), derúrgo, nvl, eronáuto, entre outro, podendo fzer prte d etp de fbrção, ontrução, montgem e/ou mnutenção O END têm omo fnldde verfr quldde do ben e ervço, redução de uto, umento d vd útl do equpmento e u preervção Porém, devdo à
15 perulodde e à mpobldde de determndo lo, e fz neeár utlzção de mqunáro epel Pr plçõe em Eno Não Detrutvo (END), nd extem dvero problem erem reolvdo, bem omo númer opçõe de pequ N áre de petróleo, gá e energ, extem dvero método qulfdo pr e relzr um npeção De mner gerl, prmer npeção er relzd é vul, que neet de um lol proprdo pr que et oorr om efá Porém, em muto o, ete lol é de dfíl eo e o peol que exeut npeção b não relzndo um npeção dequd A npeção em grnde tnque de rmzenmento, ontendo ombutíve, oque e outro, é um ponto problemáto, um vez que e requer, pr tl, utlzção de mter epe pr que oorr o trblo, omo ndme e peol téno qulfdo, por exemplo Outro ponto que tmbém pode er obervdo em tnque de rmzenmento ão npeçõe em eu nteror, onde o lol é onfndo e preent mor ro à úde do npetor, o que dfult relzção do trblo e torn o uto m elevdo pr empre Um do motvo pr needde de npeçõe no nteror do tnque é devdo fungo e btér A formção de fungo e btér urge dentro dete pel umdde reltv do r e pel má vedção e mnueo A borr, que é onttuíd pel glomerção do fungo, é trnferd do reervtóro pr o mnõe e duto de trnporte e onequentemente e ntlm em reervtóro de poto de dtrbução de ombutíve e, poterormente no tnque do veíulo A borr fet dretmente o rendmento e vd de peç de veíulo btedo om ete ombutível, lém de ur orroão no reervtóro A npeção em reervtóro deve er relzd om ele vzo, lém de um logít epel, o que reult em um proedmento dpendoo e omplexo Det form, um mnpuldor pode oluonr et quetão de form relzr um npeção vul om o tnque em funonmento, reduzndo m uto, otmzndo tempo pr npeçõe, e evtndo proedmento deneeáro Exte vbldde de o mnpuldor relzr, lém d npeção vul, olet de mter pr nále De form que, pó etudo, pom er

16 6 nerd ubtân que tquem dretmente borr e onequentemente reduzm gnfntemente pobldde de oorrer orroão no reervtóro No etor nuler, oorrem lto índe de rdção em áre retrt, mpobltndo o trblo ontínuo de funonáro A penetrçõe do elemento ombutíve preentm epço reduzdo pr relzção de npeçõe, bem omo mpobldde de proxmção de ere umno por motvo de rdção A npeçõe dentro de tubulçõe de equpmento tmbém ão neeár O robô Snke-Arm (Fgur ) é pz de relzr tl tref Det form, um mnpuldor pode oluonr lgum d quetõe pr ete etor de form relzr npeção em olor em ro vd de ere umno O mnpuldor pode er operdo remotmente e, tmbém, pour etrutur dmnut, onforme needde Outro peto mportnte, por e trtr de etor nuler, é gerção de rejeto O equpmento pode ter que permneer em áre ontrold gurdndo um novo ervço, evtndo, m, formção de novo rejeto om entrd e íd de equpmento e eóro, o que pode gerr dfuldde em novo tete e mnutenção Fgur Robô Snke-Arm
17 7 Objetvo do Trblo O preente trblo tem por objetvo o projeto teóro, modelgem, mulção, ontrole e deenvolvmento de um protótpo de um mnpuldor ontínuo tudo por tendõe pr relzção de npeçõe em gerl Por preentr etrutur modulr, pode er montdo om omprmento dvero Ferrment e equpmento, t omo âmer ou grr robót podem er opldo em u extremdde fm de relzr tref dver O tem pode er utlzdo em áre nópt pr ere umno Revão Bblográf O robô podem er lfdo por váro rtéro, egundo o número de gru de lberdde (DoF) de propóto gerl ou redundnte; etrutur nemát erl, prlelo ou íbrdo; tenolog de tução m utlzd ão elétr, pneumát e drául; geometr epl robô rteno, líndro, eféro, rtuldo e SCARA; e rterít de movmentção plnr, eféro e epl (T, 999) Dentro det lfçõe, nd extem outr form lftór, omo robô nlógo (utlzm ruto nlógo no lugr de mro-ontroldore), rtrópode (bedo em ere om exoequeleto), utônomo (podem tomr deõe), umnóde (pouem rterít etrutur umn), per-redundnte (podem lnçr o memo ponto om nfnt onfgurçõe), móve (oneguem mover u be), nno robô (pouem tmno n ordem de -9 m), robô ndutr (tem om pelo meno DoF), entre dvero outro tpo A utlzção de mnpuldore n ndútr energét é pouo explord, omprndo-e om u pobldde O projeto Amdeu (Dve et l, 998) que pou omo objetvo prnpl melor d pdde de motrgem e mnpulção de tem ubmrno, utlz pnç tud trvé
18 8 de deformçõe elát Ete mnpuldor pode er omprdo um mão om trê dedo ontroldo trvé d deformção elát do tudore o que permte egurr uperfíe rregulre Em npeçõe de duto, (Wkmoto et l, ) preent um mnpuldor que e loomove mlrmente um obr dentro de tubulçõe de dvero tmno, fzendo npeção vul do duto Outro mnpuldor que pode er utlzdo em dvero fn de npeção vul é o preentdo pel Crnege Mellon Unverty (Wolf et l, ) que fo deenvolvdo om o ntuto de prourr ten e, tmbém, poder er utlzdo em lo etreto em ntlçõe nv e de refnr Com o reente etudo de mnpuldore, urgem dver pobldde de novo deenvolvmento em áre de ro o ere umno Algun exemplo láo que podem er preentdo n utlzção no etor epl ão o robô Crlotte (Fgur ), mnpuldor prlelo tudo por tendõe, deenvolvdo pel M-Donnell Dougl om o objetvo de utomtzr tref d trpulção, vondo em 99 n mão STS-6 (Tompon e Cmpbell, 996) ou o mnpuldor prlelo deenvolvdo pel Unverdde de Cnterbury pr poonmento ntelgente de nten (Dunlop e Jone, 999), ou nd mnpuldore ontínuo pr npeção, furção e vedção (Bukngm et l, 7; Wkmoto et l, ; Wolf et l, ) N áre méd, o mnpuldore tmbém etão e fxndo omo o CRIGOS, utlzdo pr ntervençõe em rurg ortopéd, levndo em onderção o ftore umno, tornndo m preo o proedmento rúrgo (Brndt et l, 999), e o robô MARS (Fgur ), endo projetdo pr fzer um poonmento preo pr utlzção de bro e gul em rurg erv e outr (Som et l, ) O mnpuldore prlelo tmbém vêm endo utlzdo omo ferrment muldor pr o etor eronáuto võe; e mltr tnque (US Army Center for Tnk Reer, 8) No etor nuler, onde exte o pergo mnente em áre retrt, o mnpuldore entrm fzendo ubttuçõe de tubulçõe e npeçõe vu (Anombe et l, 6)


19 9 Fgur Robô Crlotte Fgur Robô MARS O mnpuldore ontínuo ão rterzdo por u etrutur egmentd flexível e modulr, dferentemente do mnpuldore trdon onde u etrutur é rígd A Fgur lutr et dferenç, onde o deeno em zul repreent o mnpuldor trdonl e o ro o mnpuldor ontínuo Um nlog pode er fet onde o mnpuldore trdon erm mlre o ere vertebrdo, enqunto que o robô ontínuo erm o ere nvertebrdo O robô ontínuo permtem um nemát redundnte e per-redundnte, poundo dvero gru de lberdde, o que o torn m mnpuláve que o
20 robô onvenon O robô ontínuo tmbém preentm vntgem de poder e devr de brrer em u trjetór om mor fldde por erem m flexíve, enqunto que o trdon poderm oldr e e dnfrem Ete tpo de mnpuldor preent um grnde número de trblo de pequ teór e lgun trblo ão pldo n ndútr (Robnon et l, 999) Aper d lr vntgen em e utlzrem o mnpuldore ontínuo, omeçou-e verfr que ete pouem ert lmtçõe e ngulrdde devdo à u urvtur (Jone et l, 7) O trblo publdo preentm quetõe obre nemát dete mnpuldore, onde é demontrdo que nemát onvenonl não onegue reolver determnd tuçõe e requer um nov modelgem, onforme derto em (Jone et l, 6) Já o trblo preentdo por (Hnnn et l, ) demontr lgum vntgen de trjetór e gru de lberdde de um mnpuldor ontínuo, onde, pr e onegur o memo reultdo om mnpuldore trdon, e fz neeáro um mnpuldor epeífo e om um grnde número de DoF Det form, o etudo d nemát dete tpo de robô é preentdo, trvé d trnformção de Denvt-Hrtenberg (Spong et l, 989) dptdo pr ete tpo de mnpuldor Fgur Mnpuldor Trdonl x Contínuo
21 O prmero robô per-redundnte dtm d déd de 6 (Anderon e Horn, 967) Algun trblo form e ão deenvolvdo á no, por pequdore de dver unverdde (Jone, 7; Sutkorn, ; MMn et l, ) Muto dete projeto form deenvolvdo om um fnldde epef e pré-determnd Dvero projeto form bedo em nm ou rterít de nm A obr form be pr lgun trblo (Hroe, 99; Mgd e Kyrukopoul, 997; Lljebäk et l 8; Bukngm, 7) O trê prmero trblo demontrm robô que relzm tref omente no plno, endo que u etrutur permte utlzção em qulquer terreno Tmbém preentm um rterít ngulr de não uportrem prtmente nenum rg em u extremdde, nvblzndo utlzção de ferrment pr relzção de operçõe Enqunto que outr ln de pequ pou rterít e plçõe ndutr, poundo be fx ou móve, podendo trblr em mbente dvero Et ln de pequ egue rterít de tentáulo e tromb (Wlon et l, 99; Wlker et l, 999; Hnnn et l, ; Hnnn et l, ) Ete pouem um rterít epeíf bed em um olun vertebrl, poundo númer vértebr, d um om lgun gru de lberdde N robót, o termo tendão é utlzdo pr degnr bo, fo, rme, orre e outro meo de trnmão Dede o prmórdo d robót té o d tu, o tendõe vêm endo utlzdo pr tur remotmente o mnpuldore, onde o motore fm ftdo d junt tud Um de u vntgen é que podem er pré-tenondo de form não gerr folg n trnmão, dptndo-e muto bem em lo onde não e pode ter muto peo ou volume, po trblm remotmente Extem do tpo de onfgurçõe prnp pr mnpuldore tudo por tendão: M N, e M > N, onde N é o número de gru de lberdde e M o número de tendõe de ontrole Se o número de tendõe for menor ou gul o número de DoF, o mnpuldor é onedo omo mnpuldor nufentemente ondo, po não podem er ontroldo de mner dequd em determnd tuçõe Co o mnpuldor pou o número de DoF menor que o número de tendõe, é lfdo omo mnpuldor
22 ufentemente ondo, permtndo o ompleto ontrole de u movmentção (T, 999) Orgnzção do Trblo Vndo tngr o objetvo propoto, et dertção erá preentd d egunte form: O Cpítulo preent onepção do mnpuldor, u rterít e deeno O Cpítulo reume tod teor neeár pr o deenvolvmento do mnpuldor, o oneto d modelgem nemát, trnformçõe de D- H e o álulo envolvdo pr relzção do mnpuldor No Cpítulo é preentdo o proeo de deenvolvmento fío do mnpuldor Ete pítulo dereve ontrução e montgem do mnpuldor em Já no Cpítulo, demontrm-e o expermento relzdo e eu reultdo, bem omo u omprçõe entre prte teór e prát No Cpítulo 6, preentm-e onluõe e lgum ugetõe pr trblo futuro
23 Conepção do Mnpuldor Coneto Báo Nete pítulo erá derto o rtéro de eol d etrutur meân e dpoção do tudore do mnpuldor A eol d rterít do degn, em prtulr, depende dretmente d needde funon e operon d poíve plçõe do mnpuldor Det form, ete trblo preentrá um mnpuldor de modo generlzdo, em rterzr um plção em epeífo e om flexbldde pr nerção de omponente em u etrutur Um mnpuldor, que preente 6 DoF, pr relzção do poonmento e outro pr orentção de um objeto em u extremdde, pode relzr qulquer tref de poonmento dentro de eu mbente de trblo (dede que dentro do eu volume de trblo e n uên de obtáulo) Com um número nferor e, ele f lmtdo, não lnçndo tod poçõe no mbente Um robô que preente m de 6 DoF é onderdo redundnte O termo redundnte é omumente utlzdo em Robót pr ndr que o número de DoF exede o mínmo pr exeução de um tref Atulmente, o robô ndutr onvenon ão nprdo no brço umno Ele trblm om etrutur erl e om um número reltvmente pequeno de elo rígdo onetdo por rtulçõe Logo, m omo o brço umno, u etrutur é lmtd, funonndo de form dequd em mbente berto, onedo e/ou preprdo Por outro ldo, repot e lmtção pode er enontrd n própr nturez Ao e nlr lgun ere nvertebrdo, t omo, polvo e eu tentáulo, mno e lem podem er notdo número DoF redundnte Não omente o ere nvertebrdo, m lgun ere vertebrdo tmbém preentm rterít
24 mlre, omo por exemplo, obr e o elefnte, em prtulr, u tromb Aper de o elefnte er o mor vertebrdo terretre, u tromb é formd omente por rne e múulo e enurv-e om fldde Mnpuldore om dvero DoF redundnte ão onedo omo per-redundnte Et rterít b om lmtção de mnpuldore trdon em mbente onfndo e om obtáulo Por u de u etrutur ltmente rtulável, ete mnpuldore ão dequdo pr operção em mbente ltmente retrto e podem er projetdo pr ter um mor robutez em relção à fl meân do que mnpuldore om bxo gru de redundân Etrutur perredundnte já form preentd em trblo om outro nome, t omo gly rtulted, tentle, nke-lke, tenor-rm, elepnt trunk wn nek e pne (Crkjn, 99) Pel vntgen preentd, opção do deenvolvmento de um mnpuldor per-redundnte fo defnd A etrutur de robô per-redundnte podem er lfd em do tpo: ontínu flexível ou vertebrd (Wlker, ) Pr o prmero tpo, u urvtur pode oorrer em qulquer ponto o longo d etrutur (Wlon et l, 99) N teor, o epço de rtulçõe dete mnpuldore é nfnto, m de ordem prát, o número de tudore é fnto, o que nvblz o oneto teóro de rtulçõe nfnt Hoje em d, lgun trblo que preentm ete mnpuldore trblm om tubo eláto ou múulo pneumáto ompoto por eçõe ndependente (Nkmur et l, ; Sofno, 6) Ete tpo de robô é omumente mdo de robô ontínuo (Robnon e Dve, 999) Já pr o egundo tpo, urvtur oorre em ponto epeífo d etrutur A nvertebrldde do mnpuldor e deve um grnde número de junt, und por pequeno lgmento rígdo Ete pode er onderdo um o prtulr de robô per-redundnte onde o número de junt tende o nfnto e o omprmento do elo tende zero Ete modelo preent um vntgem o e nlr onetulmente, que é er bmente o projeto trdonl de mnpuldore, repldo dver veze Det form, é poível utlzr ferrment de modelgem trdonl Entretnto, o número elevdo de
25 rtulçõe e pequeno lgmento podem gerr grnde omplexdde durnte nále Ao e obervr tromb, tentáulo, obr e lgun ere nvertebrdo, not-e que u etrutur é bmente ompot por múulo Ete múulo prem uportr tod etrutur bem omo erem pze de uportr tod loomoção do tem Um do defo pr ontrução de um robô om et rterít é extmente needde de replr tução do múulo Por ete motvo, etrutur do robô om et rterít deve preentr um rgdez etruturl omptível om tref er relzd Tl rgdez pode er dqurd de form mple, pel ubttução de tubo por múulo, por exemplo, o que pode reultr n nerção de omponente om mor rgdez Outr mner de elevr rgdez do tem é nerr em d vértebr um tudor, ontudo omplexdde do tem é proporonl o número de DoF, o que pode tornr o tem ltmente omplexo De form gerl, ete tpo de mnpuldor preent rterít de er ltmente mnobrável, flexível e leve Outro ponto mportnte no oneto de robô per-redundnte é form de tução El pode preentr do modo: lol e remoto O tem de tução lol, omo notdo em lgun trblo (Crkjn, 99; Pljug et l, 99), embor ejm onetulmente mple, preentm dver devntgen A tução lol é onderd mple pelo fto de o tudore etrem fxdo em d DoF, mplfndo, m, o entendmento do funonmento do tem M, o motore elétro trdon ão ondervelmente volumoo e pedo Com o tudore dtrbuído em d elo, o tem todo e torn ltmente volumoo, o que pode er um grnde problem pr tuçõe em epço onfndo O uo de tem lterntvo o motore, t omo múulo rtf (A, 7), pode gnfr um olução, porém omente pr tem que não trblem om rg elevd, po relção forç-volume própro do múulo rtf não é elevd
26 6 No tem de tução remoto, f m mple de e deenvolver um robô om volume reduzdo Podem er utlzdo tendõe (bo), por exemplo, pr relzr trnferên do onmento e potên entre o motore e o elo O motore podem er fxdo em lo dtnte do mnpuldor em, vblzndo m relzção de tref em lo nlubre e om retrçõe, t omo tnque de rmzenmento de ombutível Com utlzção de tendõe e om o motore fxdo remotmente, etrutur do mnpuldor pode e tornr btnte leve Entretnto, qunto mor o número de tendõe mpoto o tem, mor omplexdde dete Algun trblo publdo om et rterít podem er obervdo (Immeg e Antonell, 99; Sk et l, 6) Pel rzõe já td m, fo eoldo o deenvolvmento de um mnpuldor erl per-redundnte, vertebrdo e om tução remot Outro peto tmbém erá levdo em ont Como o mnpuldor tem ntenção de poder tur em dvero mbente, erá prevt utlzção de mter que não pobltem gerção de fí Dete modo, ele poderá trblr em lo que preentem preenç de gá nflmável, ombutíve e outro A eol d utlzção do mter erá bed em equpmento que pom er utlzdo em tnque de rmzenmento de ombutíve em gerl, e em funonmento Am, o mnpuldor deve poder trblr fogdo, ou ej, ubmero dentro de líqudo, e tmbém não poderá produzr fí, po o lol de tução pode onter ge Dvero trblo utlzm outro mter, om flexbldde já btnte etudd, t omo, mol (Hnnn et l, ) e tem pneumáto (Lljebäk et l 8), Fgur e 6, repetvmente, omo prte flexível do mnpuldor Um rterít ngulr dete trblo é utlzção de do de ço omo elemento flexíve


27 7 Fgur Etrutur Bed em Mol Fgur 6 Etrutur Bed em Junt Pneumát O do de ço onebdo, tmbém mdo de membrn, erá de ço nox, om epeur de, e dâmetro de,, vde Fgur 7 O ço nox é um mterl que não reebe temper, porém om um epeur tão pequen ele

28 8 pode er temperdo té um durez de Rokwell C O projeto det membrn fo bedo pr tur em um mnpuldor om elo, por o o grupo de furo, om,8, métro Et furção tem fnldde de pgem do tendõe ou de u fxção o fnl de d elo Além dete furo, membrn preent m 8 furo de fxção de, e um furo entrl de,9 pr futur pgem de bemento pr equpmento dvero, t omo, enore, âmer, grr, entre outro Ete mterl pou Módulo de Eltdde de 98GP e o do pou m de,6 grm A Fgur 7 lutr o deeno d membrn e u furção O deeno téno enontr-e no Anexo I Fgur 7 - Membrn Como dé é deenvolver um mnpuldor om dver vértebr, fo pendo em nerr um olun eprndo membrn Ete omponente fo deenvolvdo om nylon 6 Form undo tubo om dâmetro externo de / e nterno de /8 om omprmento de e m de 7,6 grm Et olun pertenem à prte rígd do mnpuldor, trblndo omo prte d fxção d membrn A olun preentm furo de,98 que ervem pr oloção de prfuo rodo de mm O furo entrl erve omo poível pgem de bemento pr lgum enor er fxdo n extremdde do tem, onforme lutr Fgur 8


29 9 Fgur 8 - Colun Fo neeáro utlzr um epçdor entre membrn por quetõe fí, de form que foe poível fxr membrn n olun e no epçdore, em que deformçõe oorrd n membrn fetem o tem rígdo Ete epçdore ou né form produzdo prtr de AetlDelrn AF om PTFE O né pouem dâmetro externo de,, nterno de e omprmento de / O né tmbém pouem um furção epeíf, endo furo om dâmetro de, pr fxção e furo de,6 pr pgem do tendõe A m do nel é etmd em,97 grm O furo entrl, omo no outro omponente, tmbém exte pr um futur pgem de bemento A Fgur 9 lutr peç Fgur 9 - Anel
, onforme Fgur, e retên")

30 Por fm, o tendõe eoldo pr relzção d trnmão d forç do motore pr o mnpuldor form de ço nox om revetmento do polímero FEP O bo de ço pou dâmetro de, e om o revetmento o dâmetro eg, Apreent ontrução 7x9 (7 grupo de 9 fo d), onforme Fgur, e retên de proxmdmente,kg Fgur Corte Trnverl do Tendão A prtr do omponente m, fo ndo o trblo de deeno do mnpuldor Inlmente fo defnd rção d md vértebr, que é ompot de um membrn egud de um olun que e lg outr membrn e por fm um nel, onforme Fgur Fgur Vértebr
 A ún vrção dete onjunto é n extremdde, onde é nerd um últm membrn O deeno de elo é preentdo n Fgur Fgur")
31 Ete é o pdrão de montgem pr d elo do mnpuldor Pr que o mnpuldor pou um rterít de longo lne, fo defndo que, prnípo, o mnpuldor ter elo, omo já prevto nterormente Cd elo é ompoto por onjunto de vértebr (membrn olun membrn nel) A ún vrção dete onjunto é n extremdde, onde é nerd um últm membrn O deeno de elo é preentdo n Fgur Fgur Elo

32 A fxção do omponente é fet trvé de prfuo uto-trrxnte de dâmetro mm por 6, mm de omprmento (more detle no Anexo II) O deejdo é que o prfuo ejm de lumíno pr evtr poível gerção de fí om o trto entre o prfuo e membrn A Fgur lutr o elo om o prfuo em u repetv poçõe Fgur Elo om Prfuo de Fxção O deeno fnl do elo do mnpuldor motr junção de trê elo, lém d nerção de um membrn n extremdde do mnpuldor A Fgur lutr o elo, d um em um tonldde dtnt O m euro é o elo be ou elo, o egundo m euro é o elo ou ntermedáro e, fnlmente, o elo m lro é o elo extremdde ou elo Pode-e pereber que o tmno do elo é, mor, o que reult d nerção d membrn n extremdde
, extên de um enor de poção dgtl do tpo enoder (pr fltr letur, ontrole e progrmção), velodde ontrolável (pr um melor")
33 Fgur Elo om Prfuo Como o ntuto é deenvolver um protótpo de bxo uto, eol do motore fo dmenond pr tl Ao nvé d utlzção de motore elétro pr onmento do tendõe, fo eold opção de ervomotore Algum rterít mportnte prevm er obervd t omo lto torque (pr que e ong relzr tução de todo o elo), extên de um enor de poção dgtl do tpo enoder (pr fltr letur, ontrole e progrmção), velodde ontrolável (pr um melor ontrole) e opção por gro lvre (o neeáro dr m de um volt pr o enrolmento do tendõe) Apó lgum pequ, egou-e o ervomotor AX- d Dynmxel Ete modelo de ervo pou lgum rterít nterente Ele trbl n fx de 7 volt, om um orrente máxm de 9mA e velodde fnl de RPM Com um redução de :, produz um torque máxmo de,67nm V e,76nm 7V Ele pou enore nterno, podendo gerr um feedbk de tempertur, velodde, poção, rg pld e tenão elétr (voltgem) reebd, o que ó é enontrdo em ervomotore de lto deempeno Ele pou du form de funonmento, modo ontínuo (gro lvre om velodde ontnte) ou modo de ún volt (trbl om o exo grndo entre ± ) Ao trblr em modo

34 ontínuo, não e tem o ontrole de poção, de form que o úno ontrole poível é o de velodde, enqunto que, o e utlzr em modo ún volt pode-e ontrolr poção dentro de om um reolução de, Com et rterít e om qução de um pl de onverão denomnd USBDynmxel, onde e pode relzr progrmção do ervomotore trvé de lngugen trdon de progrmção, ete form udo omo tudore Com o ntuto de deenvolver um poonmento dequdo do motore no mnpuldor, ele form deendo em CAD, onforme lutr Fgur Fgur Servomotor AX- Fo obervd um noerên no álulo d reolução do ervo junto o mnul No mnul, é dto que o número de poçõe poíve dentro do ângulo de tução de é de Ele tmbém t que reolução do ervo é de,, o que gerou noerên Ao e lulr reolução do ervo om o ddo de e, eg-e outro reultdo Reolução, 9 ()

35 O vlor tdo no mnul é referente um rotção omplet de 6, porém omo poçõe ão onfguráve dentro do, o vlor rel é de,9 Am, pr álulo futuro, erá utlzdo o vlor de,9 omo reolução do ervomotor Com o ntuto de verfr verdde do ddo e rgdez d redução e, tmbém, o tpo de enoder utlzdo, o ervomotor fo berto, onforme lutr Fgur 6, endo verfdo que relção de engrengen ontee onforme Tbel, reultndo n egunte relção, 97, o que 9 orreponde o ftor de redução prevto O enoder que é utlzdo no ervo é o modelo murt SV (Dteet no Anexo III) Tbel - Relção de Engrengen Engrengem Coro Mor Coro Menor Motor Exo Fgur 6 Enoder e Relção de Engrengen

36 6 N tenttv de otmzção do torque do ervomotor, fo rd um nov peç pr ervr omo um pol opld o exo do ervomotor Et pol fo und em lumíno e pou rterít motrd n Fgur 7 O tendõe fm preo junto o exo entrl d pol E furo pr fxção do tendõe pode er vulzdo n Fgur 7 A pol pou um furção epeíf e fx-e, m, o exo do motor El pou um egmento pr enrolmento do tendõe om dâmetro de mm De form, todo o torque gerdo pelo motor, que é de,67nm ou 6,9Kgm V, é trnferdo em perd dret pr o tendõe Em outr plvr, d ervomotor onegue gerr no tendõe tudo por ele 6,9Kg, ou ej, 6,77Kgf Et forç, proprd pr gerr deflexõe n vértebr ontruíd, fo ud no projeto d pol n eol de eu dâmetro Fgur 7 - Pol O poonmento do motore é outro ponto que fo nldo de form fltr montgem e o entendmento do funonmento do mnpuldor, lém de e evtr gerção de trto deneeáro, bem omo evtr rção de um be volumo pr o mnpuldor De form, dpoção do ervomotore fo relzd em formto rulr em um pl de lumíno, om epeur de mm A fxção do ervomotore fo relzd utlzndo peç de fxção


37 7 utlzdo no kt do robô Bolod A Fgur 8 lutr et peç e o ervomotor om u be e pol já nerd Já o poonmento do ervomotore n pl be é preentdo n Fgur 9 Fgur 8 Be, Servomotor e Pol Fgur 9 Poonmento do Servo Fbrnte Robot - ttp://wwwrobotom/zbxe/ntro (vtdo em //9)
 e permte que o tendõe m d")
38 8 Além de montgem, tmbém fo und um be fx pr o mnpuldor om o ntuto de dexá-lo em um plno m elevdo em relção à pol, dmnundo o ângulo de entrd do tendõe no mnpuldor, e reduzndo m o trto gerdo pelo tendõe no elo Et be pou dâmetro e furçõe mlre à membrn em eu topo, deontndo o furo entrl Em u be, furçõe ão pr u fxção n pl de lumíno A be fx pou omprmento de 6, (Fgur ) e permte que o tendõe m d pol, relzndo um urv uve té entrd n be Fgur - Be A Fgur preent montgem omplet do mnpuldor e lutr pgem de bo que em d pol e entrm n be, e e fndm em eu repetvo elo
39 9 Fgur Mnpuldor Completo O detle d tro de poçõe no n de pgem do tendõe ão preentdo n Fgur A prmer mgem motr pgem do tendõe no fnl do prmero elo Um onjunto de tendõe etá fxo no fnl do elo be trvé do btente; outro onjunto etá trondo de nl de pgem, ndo do nl m equerd e entrndo no nl entrl, endo referente o tendão que tu no elo ntermedáro; e o que e mntém no nl de pgem, que é o que preent u fxção no elo extremdde A egund mgem lutr o fnl





40 do elo ntermedáro, onde exte um tendão fnl e outro trondo de nl de pgem do nl m à dret pr o nl entrl, lnçndo o elo extremdde em u poção de fxção fnl Podem er notdo o top leeve (btente) utlzdo no fnl de d elo pr fxção do tendõe Ete memo btente ão utlzdo n pol onetd o motore, om o memo ntuto de fxção Apó nerção do bo no btente, ete é preondo om um lte té oorrer deformção, de modo que o bo de ço fque fxo nele Fgur Pgem de Tendõe
41 Em reumo, o mnpuldor ompleto é ompoto por: Be de montgem do ervomotore; Suporte do mnpuldor; ervomotore; uporte de fxção do motore; pol; membrn; olun; né; 96 prfuo mm x 6, mm; 96 prfuo M x 6mm; 96 por pr prfuo M; Aproxmdmente, metro de bo de ço; btente Cálulo de Rgdez por Elemento Fnto Com todo o tem projetdo e deendo e om o uxílo d ferrment Smulton do oftwre SoldWork, utlzd pr relzção de nále om Elemento Fnto, que é um tén numér pr reolução de tem por proxmção trvé equçõe dferen pr, form relzdo lgum mulçõe pr vulzr onfgurção dert O álulo d rgdeze form relzdo trvé d plção de forç e verfção do delomento gerdo n nále Inlmente, fo muld um forç tundo n membrn fxd em um nel Em egud fo relzd mulção om vértebr omplet A mulção om o mnpuldor ompleto não fo poível devdo à needde de more reuro omputon Com o omputdore tetdo, Deenvolvedor ttp://wwwdom/ (vtdo em //)

42 oneguu-e relzr o tete pr té trê vértebr Ao nerr um qurt vértebr, ou ej, um elo ompleto o álulo e nvm, porém pó lgum tempo deorrdo, o omputdor retornv o erro ndndo flt de memór pr exeução do álulo Am, o álulo e lmtrm nále de um membrn e um vértebr Anále d Membrn Pr o álulo nl, fo rd um ml om rterít ontd n Tbel A eol dee vlore form reltv o pdrão do progrm utlzdo, SoldWork, endo ml formd pelo tem preentd n Fgur Tbel - Confgurção d Ml do Tete Confgurção d Ml Tpo Tmno Globl (mm) Tolerân Ponto Jobno Pdrão,98,997 6 Fgur Ml Gerd pr o Cálulo d Membrn

43 A forç pld n membrn fo de N om dreção no exo z e entdo em -z O furo de fxção d membrn, bem omo tod etrutur do nel form defndo omo fxo, onforme lutr Fgur, um vez que rgdez do nel é muto mor que d membrn Fgur Forç e Deformção o Cálulo d Membrn Ete etudo preentou o reultdo relondo à plção de um forç dtrbuíd de N o longo d membrn fxd em um nel, qul relz um delomento máxmo proxmdo de, 6mm n dreção de plção d forç Como extem membrn, u deformçõe ão umuld e germ delomento gnftvo Cálulo de Rgdez pr Vértebr Pr o álulo om vértebr, fo rd um ml om rterít ontd n Tbel A ml formd pelo tem é preentd n Fgur Pode er perebd nluão de pno n extremdde d vértebr Ete btente ão repreentçõe do top leeve pr termnçõe do tendõe


44 Fgur Ml Gerd pr o Cálulo d Vértebr Como forç pld n vértebr ão provenente do tendõe, nále d forç egurm ete preeto n modelgem O reultdo ão derto egur Delomento no exo Z Igulmente o tete nteror, fo pld um forç de N dtrbuíd no btente n dreção do exo z A lter d membrn nferor e eu ponto de fxção form defndo omo fxo pr nále O reultdo referente o delomento podem er enontrdo n Fgur 6 O prâmetro d ml egurm o vlore d Tbel Fgur 6 - Forç e Deformção do Sub-Item

45 O delomento pr ete o fo de, 8 mm A rgdez enontrd pr ete álulo fo de,9 6 N/m A rgdez é elevd, m ondz om o eperdo onde o delomento n dreção de z é pequeno Entretnto, por er um nále lner, qunto mor forç pld, mor o delomento e onequentemente, o e nlr o elo ompleto ou memo o mnpuldor ompleto o delomento e omm, gerndo um delomento totl tftóro Delomento Rotonl Como o tem é x-métro, pr ete álulo, nále fet pr o exo x form umd dênt pr o exo y Igulmente o tete nteror, fo pld um forç de N, porém gor pld em um btente n dreção perpendulr o exo x O ponto de fxção form o memo do ub-tem nteror O reultdo do delomento ão preentdo n Fgur 7 O prâmetro d ml form o vlore d Tbel Fgur 7 - Forç e Deformção do Sub-Item O delomento reultnte pr ete o fo de, 9mm, om omponente x de, 7 mm, erro redul em y de,67x mm e om omponente z de, 88 mm A rgdez enontrd pr ete álulo fo de
46 6,8 N/(mrd) A rgdez é m bx (omprndo om do ub-tem ), o que já er eperdo e deejdo, um vez que o more delomento erão relzdo n dreção x e y Com et deformção e om forç e retrçõe pld, pode-e enontrr um ângulo proxmdo de,º pr urvtur d vértebr, ob N em pen um do tendõe No pítulo egunte o mnpuldor propoto é modeldo nemtmente, e o prâmetro de rgdez obtdo por Elemento Fnto ão udo no álulo de eu equlíbro etáto
47 7 Modelgem Teór Coneto Báo de Cnemát Pr e etudr o omportmento de mnpuldore, é neeáro que e ten um onemento de tén de obtenção de poção e de orentção de orpo rígdo Pr relzr ete etudo, fz-e neeáro o onemento obre trnformçõe de oordend Um mnpuldor genéro qulquer pode er repreentdo omo um tem de orpo rígdo Sendo O xyz um tem de oordend fxo no epço e O um ponto rbtráro no mnpuldor, poção de O é repreentd pelo vetor X, onforme Fgur 8 A orentção do orpo rígdo é dd pel dreção do exo x, y e z Fgur 8 Poção e Orentção do Corpo Rígdo x X y () z
48 8 Aumndo, j e k omo vetore untáro em relção o exo x, y e z, omponente de d vetor untáro podem er onderd omo endo o oeno dretor de d exo projetdo no tem fxo A mtrz de rotção do orpo rígdo é repreentção de um trnformção de oordend que relon oordend de um ponto P qulquer em do tem om mem orgem El tmbém preent orentção do orpo rígdo em relção à orgem A Fgur 9 preent do tem om orentçõe dtnt, m om orgen dênt Fgur 9 Trnformção Rotonl A oordend de um ponto no tem O xyz podem er repreentd pel Eq (), enqunto que oordend no tem O -xyz ão dert pel Eq () px p py p z () px p py p z ()
49 9 O ponto P pode er derto em formto vetorl em relção o tem O - xyz por: k p j p p p z y x () Aumndo que o ponto P etá lolzdo em um ponto fxo, porém om poonmento dtnto entre o do tem, podem-e erever relçõe: k k p k j p k p k p p k p j k p j j p j p j p j p p k p j p p p p p z y x z z y x y z y x x () z y x z y x p p p k k k j k j k j j j k j p p p (6) Ou nd, pode-e erever de form ompt omo: Rot p p (7) onde Rot é mtrz de rotção k k k j k j k j j j k j Rot (8) Anlogmente, pode-e r mtrz que relz trnformção de O - xyz pr O xyz : k k p k j p k p p k k p p j k p j j p j p j p j p p k p j p p p p p z y x z z y x y z y x x (9)
50 p Rot p p p k k k j k j k j j j k j p p p z y x z y x () Vle notr que, o e omprr mtrze de rotção, é perebdo que T Rot Rot A rotçõe em torno do exo x, y e z etão preentd n Eq (- ) Utlzndo Fgur 9 omo be, rotçõe ão luld em função de ângulo θ x, θ y e θ z, reultndo no tem de oordend O -xyz ( ) ( ) ( ) ( ) x x x x x k k k j k j k j j j k j Rot x θ θ θ θ θ o n n o, () ( ) ( ) ( ) ( ) y y y y y k k k j k j k j j j k j Rot y θ θ θ θ θ o n n o, () ( ) ( ) ( ) ( ) o n n o, z z z z z k k k j k j k j j j k j Rot z θ θ θ θ θ () Trnformção Homogêne Um trnformção omogêne pode er defnd pel junção d mtrz de trnlção e d mtrz de rotção em um ún mtrz A: p p p p P z y x ()
51 p p p p P z y x () z k k k j k y j k j j j x k j X R A (6) A mtrz A é ompot por um ub-mtrz de rotção ombnd o vetor X e de um qurt ln preend om zero e um A trnformção de oordend pr ete tem pode er omptd trvé d Eq (7), tmbém oned omo trnformção omogêne: p X R p P A P P (7) Um d vntgen n utlzção d tén de trnformção omogêne é omptção d formulçõe em trnformçõe oneutv Em um o gerl, onderm-e n trnformçõe oneutv de um tem n pr um tem, e umndo A omo mtrz relond om trnformção omogêne do tem - pr o tem A Eq (7) que relon o tem n om o tem é Eq (8) n n n n n n n P A P A A A A A p P K (8) Note que n uên de rotçõe, mtrz A é mplfd e reult n mtrz de trnlção obre o exo x, y e z por dtân x, y e z :
52 x y Trnl, b, (9) z Notção de Denvt-Hrtenberg Em termo ger, notção de Denvt-Hrtenberg (D-H) flt obtenção do onjunto de equçõe d nemát de um elo em relção o elo nteror de um mnpuldor A Fgur preent um pr de elo djente, Elo - e Elo, e u repetv rtulçõe, junt -, junt e junt N notção de D-H, o tem de oordend do -émo elo etá lolzdo n ntereção d norml omum entre o exo d junt e, uj dreçõe ão defnd pelo exo z - e z A norml omum é repreentd pel dtân mínm entre o exo z - e z, egundo o deeno ret H O O exo x deve egur dreção reltv à extenão d norml omum, no entdo de z - pr z Já o exo z mntém dreção do exo d junt, enqunto que o exo y é defndo de form que o tem reultnte O -xyz ej um tem de oordend que g regr d mão dret
, o ângulo de torção d junt (α), o delomento d junt (d) e o ângulo d rotção d junt (θ), onde: é o ftmento lner entre exo É dtân medd o longo d norml omum")
53 Fgur Notção de Denvt-Hrtenberg A poção reltv entre o do tem de oordend preentdo, n Fgur, O --x-y-z- e O -xyz, é ompletmente defnd pel poçõe reltv o exo x - e x, y - e y e z - e z O prâmetro que defnem t poçõe ão: o omprmento d norml omum (), o ângulo de torção d junt (α), o delomento d junt (d) e o ângulo d rotção d junt (θ), onde: é o ftmento lner entre exo É dtân medd o longo d norml omum entre o exo nldo Ito é, é dtân entre z - e z o longo do exo x ou, nd, dtân H O ; α é o ângulo de torção que o elo ofre prtr d junt nteror, ou ej, é o ângulo de rotção que oorre n dreção x entre o exo z - e o exo z ; d é dtân entre o elo, meddo o longo d junt nteror, to é, é dtân entre o exo x - e x medd o longo do exo z -, prtndo de O - em dreção H De fto, el é norml omum entre x - e x Ete prâmetro preent nl potvo o g n dreção de O - pr H e negtvo n dreção opot; θ é o ângulo formdo entre norml omum de elo uevo, ou ej, é o ângulo de rotção n dreção z - entre o exo x - e o exo x
54 A Tbel preent outr nformçõe referente o prâmetro e o tpo de junt, rottv ou prmát Tbel - Prâmetro x Tpo de Junt Prâmetro Símbolo Junt Rottv Junt Prmát Comprmento do Elo Fxo Fxo Ângulo de torção α Fxo Fxo Delomento d Junt d Fxo Vrável Ângulo d Junt θ Vrável Fxo Atrvé do prâmetro, poção e orentção reltv o do elo podem er dert pel trnformçõe de trnlção e de rotção entre o do tem de oordend fxo Et trnformçõe preentm etp: Rotção no exo z - de um ângulo θ e lndo om x -, egundo regr d mão dret; Trnlção no exo z - de um dtân d, prtndo do ponto O - té o ponto H ; Trnlção o longo do exo x de um dtân, prtndo do ponto H té o ponto O ; Rotção em torno do exo x de um ângulo α e lndo om z -, egundo regr d mão dret Am, A Rot Trnl Trnl Rot z, θ z, d x, x, α () Subttundo pel mtrze de rotção e trnlção em z e x, onforme Eq (), () e (9), tem-e que:
55 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) o n n o o n n o d A α α α α θ θ θ θ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) o n n n o o o n o n n o n o d A α α θ α θ α θ θ θ α θ α θ θ () O etbelemento do tem de oordend d extremdde pode er defndo de form m onvenente, e orentção de z n for eold prlel à orentção de z n- Já o tem de oordend d be, em mnpuldore omer, otum er defndo pelo própro fbrnte, porém, em o que ele não etej defndo, eol do tem de oordend deve er fet em qulquer ponto do exo z O exo x e y podem er eoldo de form gerl, ontudo devem egur regr d mão dret Modelgem do Stem A metodolog utlzd pr modelgem nemát dete trblo fo bed n notção de D-H A formulção do mnpuldor é obtd por um ére de ubttuçõe pld n mtrze de trnformção omogêne, undo D- H Outro ponto mportnte é que fo umdo que d elo dqure um form rulr om urvtur ontnte, mlr à pótee em trblo nterore obre mnpuldore mulndo tromb de elefnte (Hnnn, et l, ) Et pótee é tftór qundo forç grvton ão pequen em relção à forç no tendõe
, relzd pr d junt No entnto, o mnpuldore ontínuo não pouem junt explít om equvlên em rotçõe em θ")
56 6 Em mnpuldore trdon, nemát dret utlz um pdrão pr trnformção omogêne, trvé d mtrz A, provenente d notção de D-H A notção de D-H, onforme expldo no ub-tópo, r um relção entre oordend lo d junt θ ou d e poção e orentção d extremdde do mnpuldor E relção é bed em rotçõe e trnlçõe ndependente egundo Eq (), relzd pr d junt No entnto, o mnpuldore ontínuo não pouem junt explít om equvlên em rotçõe em θ e trnlçõe em d Um mnpuldor ontínuo utlz outr vráve, κ e φ, onde nd o omprmento do elo meddo o longo de eu exo, κ é urvtur do elo (nvero do ro de urvtur) e φ é o ângulo d urvtur, onforme lutr Fgur Fgur Defnção de, κ e φ De mner, fz-e um equvlên entre θ e d e, κ e φ Undo t lgum tén geométr mple pode-e egr em [ θ d] f (, κ, φ ) reltv o prâmetro do D-H (Hnnn, et l, ) Outr onfrmção retrd de (Hnnn et l, ) é que A(f (, κ, φ )) A (, κ, φ ), o que torn
 pr")
57 7 poível relonr o proedmento de D-H pr e egr à oordend d extremdde do mnpuldor O modelo dete mnpuldor é bedo em vértebr, onde erá relzd modelgem pr d eção de vértebr Pr e obter o modelo ompleto, bt multplr mtrze de d número de vértebr do mnpuldor por elo Am, modelgem erve pr um mnpuldor om número de elo rbtráro Bmente, modelgem do mnpuldor erá bed em um onverão de um tem nvertebrdo (ontínuo) pr um vertebrdo (om prâmetro onentrdo) A Fgur preent um deeno equemáto de d vértebr (d Fg ), pr utlzção d notção de D-H, onde θ e θ ão junt rottv, relond om deformçõe roton d membrn nferor d vértebr, enqunto que d é um junt prmát que etá od o delomento n olun d vértebr, devdo prnplmente à membrn, e θ e θ ão junt rottv od à egund membrn d vértebr, entre olun e o nel O exo z, ão referente o exo z uprtdo no tem Tmbém é repreentd n fgur urvtur do mnpuldor em um vértebr Fgur Adptção d Vértebr pr D-H
58 8 Fo umdo que d membrn pou do gru de lberdde e que olun pr ter um gru de lberdde Logo, θ e θ ão junt rottv, relond om deformçõe roton d membrn nferor d vértebr, enqunto que d é um junt prmát que etá od o delomento n olun d vértebr, devdo prnplmente à membrn, e θ e θ ão junt rottv od à egund membrn d vértebr, entre olun e o nel Outro ponto que é umdo é relção entre junt rottv d prmer e d egund membrn θ etá opldo θ enqunto que o θ etá opldo o θ Ete oplmento no modelo é neeáro pr que ext urvtur ontnte umd no mnpuldor rel Aumndo-e que não á forç extern tundo n vértebr, e deprezndo o efeto d grvdde, pelo equlíbro etáto tem-e que θ θ π e θ θ O delomento d e deve o delomento d membrn no exo z, onde não oorre rotção e, m, omente trnlção A membrn d be, om o do prmero DoF (θ e θ ), tem omo fnldde gerr dreção e o entdo do onjunto olun, vértebr e nel, enqunto que o d é o tudor referente à ompreão ou longmento d vértebr Já pr θ e θ, que ão opldo θ e θ, repreentndo dreção e o entdo do nel, que é be de fxção d próxm vértebr, ou ej, o pr fnl do DoF ão o reponáve por dreonr vértebr futur do mnpuldor Como o θ θ π e θ θ, o modelo pode umr pen vráve: θ, θ e d A Tbel preent o reultdo d notção de D-H pldo em um vértebr untár Tbel - Prâmetro de Denvt-Hrtenberg Elo α A θ d Tpo de Junt π θ Rottv π θ π Altur d Membrn Rottv π d Altur d Colun π Prmát θ π Rottv Altur do Anel π θ Rottv
59 9 Com o prâmetro d notção de D-H defndo, pode-e utlzr Eq pr e determnrem o vlore d trnformção omogêne, to é, d mtrz A d be pr extremdde ( θ ) n ( θ ) ( θ ) o ( θ ) o n A () ( θ) n( θ ) n( θ) o( θ) o( θ ) mn( θ) ( θ) n( θ ) o( θ) n( θ) o( θ ) mo( θ) o( θ ) n( θ ) o n A () A A o n o n ( θ) n( θ ) o( θ) o( θ ) n( θ) ( θ) n( θ ) n( θ) o( θ ) o( θ) o( θ ) n( θ ) o m ( θ) n( θ π )( d ) n( ) m θ ( θ) n( θ) n( θ π )( d ) n( θ )( d ) o L L L L ( θ) o( θ θ ) n( θ) o( θ) n( θ θ ) ( θ) o( θ θ ) o( θ) n( θ) n( θ θ ) n( θ θ ) o( θ θ ) o m ( θ) n( θ π )( d ) n( ) m θ ( θ) n( θ) n( θ π )( d ) n( θ )( d ) o L L L L () ()
60 6 ( ) ( ) ( ) ( ) 6 d d d A m m π L L L L onde: m é ltur d membrn; é ltur d olun; é ltur do nel;,,, ão n(θ ), n(θ ), n(θ ) e n(θ ), repetvmente;,,, ão o(θ ), o (θ ), o (θ ) e o (θ ), repetvmente; d é o delomento d junt ; - é n(θ - θ ); - é o(θ - θ ); π é o(θ π ) - n(θ ) - A dreçõe de d junt d vértebr ão dd pelo vetor untáro b, obtdo d terer olun d mtrze A, ou ej, pr junt: e X b t n A (7) b b b b b
61 6 Subttundo o vlore do protótpo deenvolvdo, eg-e à oordend d extremdde de um vértebr, Eq 8, endo m,mm,,mm e,,67mm, onforme defndo nterormente n eção ( ) ( ) ( ) ( ) ( ) ( ),67,,67,,,67,, (8) d d d d d d z y x X m m e π π Aumndo dmenõe td, enontr-e mtrz Jobn J pr um vértebr: [ ] ão : e de rotção mtrze de trnlção onde ub - (9) b b b b b J z y x z y x d z d y d x z y x z y x J J J J J J A L A L A L δθ δ δθ δ δθ δ δθ δ δθ δ δθ δ δ δ δ δ δ δ δθ δ δθ δ δθ δ δθ δ δθ δ δθ δ
62 6 ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) () * * d d d d d J m m L L L L L L L L L L L L L π π onde é,67 - m, m é, - m e o vlor de é de, - m J A () O ponto de ngulrdde d vértebr ão luldo qundo o determnnte de J L é gul zero, m: ( ) ( )( )( ) ( ) ( ) d d J Det L () Pr tfzer guldde m, lembrndo que π θ θ θ θ e, tem-e que: e e e d d d ± ± ± ± π π θ π π θ π π θ π π θ ()
, relond um be x, y e z Pode-e fzer nále do omprmento do tendão trvé de álulo vetor, onde o delomento reultnte do tendão é")
63 6 Pr lulr o delomento do tendão, o erem nerdo vlore n entrd do ervomotore, fo relzd um nále geométr pr que em egud foe mplementdo em um ódgo trvé d ferrment LbVew A Fg lutr orgem do vetore e o vetore utlzdo pr o álulo Com be n Fg, é umd um be ortonoml, om o vetore (n, t e b ), relond um be x, y e z Pode-e fzer nále do omprmento do tendão trvé de álulo vetor, onde o delomento reultnte do tendão é o reultdo d ubtrção vetorl entre o vetor rn e om vetorl entre o vetore b Colu r n Anlogmente ete álulo, o álulo de todo o outro tendõe podem er relzdo Fgur Vetore Atrvé do álulo vetorl, onegue-e egr o omprmento totl do tendõe n extremdde do mnpuldor (pr d tendão), omndo o delomento luldo pr d vértebr O omprmento do tendão pr um elo é om do omprmento do tendõe de d vértebr do elo em quetão Como fo umdo que tod vértebr de um elo pouem o memo vlore pr o DoF (pr que tod
64 6 vértebr de um elo poum mem urvtur), o omprmento totl do tendõe de um elo erá, o omprmento luldo pr um vértebr, om u repetv lterçõe devdo o vlore do DoF deejdo, multpldo pelo número de vértebr Com o, e poção fnl deejd do elo for poção [α,β,] T, o omprmento do tendõe de um vértebr pode er luldo: [ α, β, ] n vert T () onde α é o ângulo fnl do elo n dreção do exo x (θ ), β é o ângulo fnl do elo n dreção do exo y (θ ), é o delomento do mnpuldor n dreção do exo z (d ), e n vert é o número de vértebr do elo em quetão Portnto, o omprmento totl ndvdul de d tendão é ddo por: n () n vert onde o ub-índe n é o elo nldo, o ub-índe é o número ndtvo do tendão (vrndo de té ) tudo, n é o omprmento do tendão do elo n e é o omprmento do tendão de um vértebr Logo, pode-e lulr o vetor H, que é ompoto pel equçõe enontrd pr n, ontendo o omprmento de d tendão por elo: onde, [ ] T H (6) [ ] T n n n n n (7) om n vrndo entre e, repreentndo o elo nldo Tmbém, fo luldo um vetor Q, ompoto por θ n e d n, que nd o DoF de d elo, modeldo egundo D-H Pr o mnpuldor em etudo, que pou elo, têm-e que: [ θ θ d θ θ d θ d ] T Q θ (8)
65 6 Pr lulr o Jobno de um ún vértebr fo utlzd guldde: q q q q q q q q q q q q J d q q J J J J J J J J J J J J J Q H (9) onde [ ] T n n n n n e [ ] T n n n n d q θ θ De form, fo luldo o Jobno, relonndo o delomento do tendõe e o DoF pr um ún vértebr, onde: ;, J () ( ) ( ( ) ( ) ( ) ( ) ( )) ( ) ( ) ) ( ;, r d r d r r d d d J m m m m K K K K ;, J () ( ) ( ( ) ( ) ( ) ( ) ( )) ( ( )) ) ( ;, r d r d r r d d d J m m m m K K K K
66 66 ( ) ( ( ) ( ) ( ) ( ) ( )) ( ) ) ( ;, r d r d r r d d d J m m m m K K K K ( ) ( ( ) ( ) ( ) ( ) ( )) ( ) ( ( )) ) ( ; 8, m m m m d r r d r r d d d J K K K K ( ) ( ( ) ( ) ( ) ( ) ( )) ( ( )) (6) ;, r d r d r r d d d J m m m m K K K K ( ) ( ( ) ( ) ( ) ( ) ( )) ( ( ) ( )) ) (7 ; 8, r r d r d r r d d d J m m m m K K K K ( ) ( ( ) ( ) ( ) ( ) ( )) ( ) ( ) (8) ;, r d d r r d d d J m m m m K K ( ) ( ( ) ( ) ( ) ( ) ( )) ( ( )) (9) ;, r d d r r d d d J m m m m K K K K ( ) ( ( ) ( ) ( ) ( ) ( )) ( ) ( ) () ;, r d d r r d d d J m m m m K K
67 67 J, K r Kr ( ( d ) d ( d ( )) ( ) )) m ( ) r ( d )) ( d ( m m m K K () Com J q, onde vr de té (ndndo o tendão) e j, de té j (ndndo o DoF), be-e que pr vlore onde j >, dervd e q j, ão nul, po o modelo dotdo lev em onderção pen geometr do problem Am, tem-e que, o omprmento do tendõe depende do vlore deejdo pr d um do DoF do elo O tendõe que onm o elo etão fxdo em motore n be, portnto, o omprmento de um tendão om termnção no egundo elo, erá o omprmento neeáro pr tuá-lo d mner deejd omdo o omprmento do tendão, orrepondente, no prmero elo Ou ej, pr e tur o elo ntermedáro, o tendõe do elo be tmbém devem er tudo, e onequentemente, o memo oorre pr o terero elo Pr e egr o omprmento totl fnl do tendõe omm-e o omprmento do tendõe orrepondente o elo tudo Portnto, o Jobno pr o mnpuldor ompleto pode er enontrdo: J T f f f dh dq q q q q q d ( θ, θ, d ) ( θ, θ, d ) f ( θ, θ, d) ( ) ( ) ( ) θ, θ, d f θ, θ, d f θ, θ, d () l l l l l (om l endo o omprmento do tendão ), onde, umndo [ ] T tem-e que:
68 68 ( ),, n n n n n n n n n n n n n q l q l q l q l q l q l q l q l q l q l q l q l q l d f θ θ () Reumdmente, o que Eq - demontrm é que, omo fo relzd um nále etát do mnpuldor, o elo ão umdo omo ndependente Ou ej, o tur o últmo elo, omente ete elo reeberá o vlore do DoF deejdo Entretnto, o tur o elo ntermedáro, tnto o elo ntermedáro qunto o últmo elo reeberão o vlore deejdo e, nlogmente, pr o elo be, onde o tur o elo be, todo o elo egunte reeberão o vlore entrdo pr o elo deejdo Ito oorre po o e tur o tendõe de um elo, o tendõe do elo egunte tmbém devem er tudo, pr que e evtem folg ou tenonmento ndeejdo Por ete motvo, mtrz J T pou termo nulo Pode-e pereber que olun e referem à tuçõe do elo onde, o prmero elo nfluen em todo o elo egunte, m omo, o egundo elo (que nfluen no elo ), enqunto que o terero elo ó tu nele memo Apó o álulo nemáto terem do relzdo, fo nd fe de ontrução e montgem do mnpuldor O Cpítulo expl o detle det etp
69 69 Contrução e Montgem montgem Apó modelgem teór deenvolvd, nou-e fe de ontrução e Crterít do Mter Algun rtéro form egudo pr eol do mter Conforme já tdo, onepção dete mnpuldor é pr utlzção gerl Porém o foo dete trblo é o deenvolvmento pr plçõe em END no etor energéto de óleo, gá e dervdo Det form, o omponente não podem er emore de fí e lor pr que u utlzção não ej lmtd em lo om ombutíve em gerl Outr rterít que o mnpuldor pou é pobldde de trblr ubmero em ombutível, águ ou outr ubtân n fe líqud, etndo pto trblr om tempertur de té 8 C onforme rterít do mter utlzdo (Anexo II) Outro ponto mportnte é mnmzção do trto O tendõe ão revetdo om um md de FEP que, em ontto om o nylon 6 onegue relzr um movmentção om bx gerção de trto De form, oorre redução d forç prlel à movmentção do bo e, onequentemente, exgndo meno torque do ervomotore O ervomotor utlzdo onegue gerr forç de proxmdmente 6kgf, o que é ufente pr relzr deformçõe no protótpo dete mnpuldor Por e trtr de um tem remoto, o ervomotore podem etr tudo um dtân egur d extremdde do mnpuldor, tnto pr o operdor qunto pr o funonmento de um npeção, por exemplo N plção em tnque, o ervomotore não entrrm em ontto dreto om o ombutível O ontto do mnpuldor om o ombutível erá neeáro, nee o, e por ete motvo, olun e o né form delzdo om delrn e
70 7 nylon Ambo pouem bo etbldde quím e ão lrgmente utlzdo em ontto om ombutíve de veíulo em gerl, t omo utomóve e võe Outr rterít mportnte pr o mnpuldor é que ete mter pouem bx tx de borção de águ, o que evt obrepeo no mnpuldor, bem omo deperdío e retrd ndeejd do ombutível de dentro de um reervtóro, por exemplo A eol do mter lev em ont o peo do tem A etrutur do mnpuldor pou m de,77kg, enqunto que be pou,6kg e pl de uporte nlundo o motore, pol e uporte pr motore,,kg Logo, o peo totl do mnpuldor (em o tendõe) é de, proxmdmente,,968kg Ete peo fnl demontr que ele é reltvmente leve o e omprr om um mnpuldor om rterít mlre, tudo por tem pneumáto ou dráulo Outr rterít pré-defnd é que não á needde de um etrutur donl pr ervr omo gu, dr utentção ou memo umentr flutubldde do mnpuldor Não á needde de uxílo pr flutubldde pel bx relção entre o peo do mnpuldor e potên do ervomotore O mnpuldor não neet de utentção donl por er tudo por tendõe pré-tenondo Como todo o tem pou reltv proteção o ontto om ombutível, ele pode fr mero em needde de um proteção extern (luv) pr o omponente De qulquer mner, é nterente relzção de mnutenção pó-utlzção, om um lvgem do mnpuldor om o ntuto de retrr exeo de ombutível e evtr deterorção do mter Além do, longo przo, é neeáro um mnutenção omplet do tem pr verfção de lterçõe no mter A furção entrl de tod prte do mnpuldor fo deenvolvd pr nerção de bemento de novo omponente Vle reltr que, om nerção de um bo no tem, ete deve preentr rterít mlre à do mnpuldor Ou ej, deve pour proteção ontr o ontto om ombutível, poder trblr em tempertur de té 8 C, bem omo er flexível pr poder trblr juntmente om deformçõe extente, durnte um tref, n etrutur do mnpuldor Um exemplo de um poível utlzção do furo entrl
71 7 é nerção de um mnguer de váuo Et mnguer pode ervr pr olet de mterl pr nále, relzr lmpez do lol npeondo ou memo fzer ptur de lgum mterl ndeejdo no lol, tl omo um ferrment ou eóro que ten e deprenddo A be do mnpuldor e o uporte form feto em lumíno pel u rterít de fál unbldde e bx dendde Et peç não ão prevt pr etr em ontto dreto om ombutível, portnto u retrçõe e lmtm não gerr fí, lor exevo, e utentção do mnpuldor O Anexo II preent propredde do mter utlzdo n onepção do mnpuldor Contrução e Montgem Tod ungem do mnpuldor fo relzd egundo o deeno téno deenvolvdo (Anexo I) A furção de todo o omponente preou ter lt preão, por erem dvero furo de tmno reduzdo (,mm, mm e,mm) A membrn é um peç onderd omo rul, po é peç que m ofre deformçõe, lém de pour dâmetro de furo pequeno e needde de gerr deformçõe om bo repetbldde Por ete motvo, fou deddo relzr furção e orte d membrn por orte ler A membrn ão de ço, que pou módulo elevdo de eltdde, o que dfult u deformção Pr oluonr ete problem, fo deenvolvdo um tem pr rr um leve orrugdo n membrn Com o oplmento de du rruel, om lgum furçõe dênt à d membrn, oneguu-e fxr membrn Com o uxílo de um prfuo de tmno M x mm, juntmente om um rruel de dâmetro externo de mm, fo pld um forç de, proxmdmente kgf, trvé de um pren O deeno do tem et repreentdo n Fgur, enqunto que, n Fgur, é preentd foto d membrn norml e d membrn orrugd
 x")
 A Fgur 6 e 7 preentm foto do né e d olun nte e depo d ungem")
72 7 Com o ntuto de provetr melor flexbldde do tem, prte d membrn que pou o orrugdo elevdo etá empre olod n dreção e entdo d próxm peç er enxd Fgur Montgem do Stem pr Gerr Seção Corrugd Fgur Membrn Norml (topo) x Corrugd (nferore) Pr o retnte do orte e furçõe m rít, no né e n olun, fo deenvolvdo um ódgo pr utlzção n fredor Serlne pr relzção d tref (Anexo IV) A Fgur 6 e 7 preentm foto do né e d olun nte e depo d ungem

, é formd d vértebr,")
73 7 Fgur 6 Anel Ante e Depo d Ungem Fgur 7 Colun Ante e Depo d Ungem Com o onjunto já derto no Cpítulo (membrn olun membrn nel), é formd d vértebr, Fgur 8


74 7 Fgur 8 Vértebr Montd O tendõe form fxdo no fnl de d elo e, tmbém, n pol, trvé d utlzção de btente de fxção (top leeve) O bo fo nerdo dentro do btente que ofreu um deformção de form preonr o bo, não o dexndo delzr, onforme o detle preentdo n Fgur 9 Fgur 9 Detle d Termnção do Tendõe A fxção do motore d pl be fo relzd nerndo o onjunto, be do motor, motor e pol, om o tendão já fxdo n pol A pl be tmbém uport be do mnpuldor, que é fxd trvé de prfuo A Fgur lutr pl be já om o motore e be do mnpuldor nerdo

75 7 Fgur Pl Be, Servo, Pol e Tendõe O mnpuldor ompleto, montdo em u onfgurção fnl, é preentdo n Fgur

76 76 Fgur - Mnpuldor Completo Cd ervomotor pou du entrd/íd pr um plugue pdrão d empre Molex om ódgo 7 om trê termn, onde do ão pr lmentção e um pr trnferên de ddo A Fgur preent form de oloção do onetore


77 77 Fgur Fção do Servomotor Tnto n Fgur, qunto n, é poível vulzr fção de lgção do motore Pode-e pereber que o ervomotore trblm em ére Am, todo o ervomotore etão nterlgdo trvé de bo dênto, endo que no prmero motor entrd etá lgd o eóro USBDynmxel, e o últmo motor tem um de u entrd lgd um fonte de lmentção Medndo voltgem no ervomotore, é notd um perd de proxmdmente % entre o prmero ervomotor lmentdo e o últmo O USBDynmxel é então lgdo um omputdor pr que e po relzr omunção, onforme lutr Fgur Fgur Conexão Servomotore e Computdor

78 78 O USBDynmxel pou lgum rterít nterente Ele pode trblr omo um onveror USBRS ou USBRS8 ou USBTTL Am, é poível relzr um progrmção de ontrole do ervomotore trvé do oftwre LbVew, utlzndo o protoolo de omunção do ervomotore O protoolo de omunção do ervo é lf-duplex bdreonl, ou ej, mbo o ldo d onexão podem trnmtr e reeber ddo, porém não multnemente Ele trbl om do tpo de pote de ddo: Intrução e Sttu O pote Intrução é envdo do PC (v USBDynmxel pr o tem utlzdo nete trblo) pr o ervomotore, enqunto que o pote Sttu fz o entdo nvero, do tudore pr o PC O protoolo trbl om 8 bt e bt de prd A omunção é erl, e d tudor pou um número de dentfção (ID) Em o onde ID poum o memo vlor, é gerdo um erro de omunção no envo do pote, onforme lutr Fgur Fgur Comunção Servo Controldor O pote Intrução é o pote de envo de omndo pr o tudore Ele pou egunte etrutur: XFF XFF ID COMPRIMENTO INSTRUÇÃO PARAMETRO_ PARAMENTRO_N CHECK SUM onde, XFF XFF orreponde o nío d ntrução, ID é o número de dentfção do ervo; COMPRIMENTO é o tmno d ntrução; INSTRUÇÃO é ntrução er exeutd; PARAMETRO N ão o
79 79 poíve prâmetro pr ntrução nerd, e o CHECK SUM é o bt d om de verfção d omunção, udo pr verfr ntegrdde de ddo trnmtdo Já o pote Sttu é o pote de envo de omndo do tudore pr o proemento Ele pou egunte etrutur: XFF XFF ID COMPRIMENTO ERRO PARAMETRO_ PARAMENTRO_N CHECK SUM onde todo o ten pouem mem rterít do pote Intrução, porém, nete o, no lugr d ntrução ele omun um ERRO Ete byte repreent lgum erro oorrdo ej, n trnmão/reepção ou lgum erro prédefndo no própro ervomotor A Tbel preent o poíve erro e eu gnfdo Tbel - Erro no Pote Sttu Bt Nome Derção 7 6 Erro de Intrução e for envdo um ntrução deoned Erro de Crg e o torque máxmo não puder lnçr rg pld Erro de CHECK SUM e ouver erro n om d verfção Erro de Dtân e ntrução envd perorrer m do que o lmte Erro de Tempertur e tempertur ntern do tudor for mor que o lmte Erro de Ângulo Lmte e poção deejd etver for do lne do lmte do ângulo (oráro ou nt-oráro) Erro de Voltgem e voltgem for uperor ou nferor o lmte prédefndo O ódgo de ntrução podem er enontrdo no Anexo V, retrdo do mnul do ervomotor AX-
80 8 Com pobldde de utlzção do oftwre LbVew, trvé d pl USBDynmxel, form deenvolvd funçõe pr utlzção n progrmção Ao totl form deenvolvd funçõe epeíf pr omunção entre o progrm e o ervomotore O beçlo del podem er vulzdo no Anexo VI A funçõe gerd tendem todo o ódgo de ntruçõe do Anexo V, endo que lgum de funçõe mereem um tenção epel por u funonldde A função denomnd dxl ntlze é reponável pel nlzção do ódgo El poblt verfção d onexão entre o ódgo e o ervomotore El retorn um ntero ndndo e ouve erro n nlzção ou não De form mlr dxl termnte é reponável pel orret fnlzção do progrm A dxl wrte word é um função que fo rd om o ntuto de erever ntruçõe n memór do ervomotore, ej n EEPROM ou n RAM Et função reebe omo ddo dentfção do ervo e ntruçõe erem exeutd om eu repetvo prâmetro A dxl red word é pz de relzr letur do ddo vndo do ervo pr o ódgo Et função retorn um ntero ndndo o reebmento do ddo do pote Sttu A entrd ão referente o ID do ervo e à ntruçõe pd Já função dxl et bud defne qul tx de trnmão n omunção A entrd de função ão reltv à entrd e tx preentd n Tbel 6 Tbel - Tx de Trnmão Endereço Hex Velodde (BPS) X X X 7 X7 9 X9 6 X 767 X 79 X XCF 96
81 8 Apó onexão do tem meâno derto nterormente o PC, é poível ontrolr poçõe do mnpuldor O próxmo pítulo preent o expermento e reultdo obtdo
82 8 Expermento e Reultdo Inlmente, utlzndo equên de montgem do ervomotore n pl be, fo rd um tbel fzendo relção entre o ervomotore e o elo que d um on Apó et relção rd, fo rdo um progrm pr relzção d lbrção do tendõe, om fnldde de dexá-lo prétenondo Como fxção do tendõe fo relzd de form degul, vrção ngulr pr o pré-tenonmento do tendõe é ndvdul e ngulr, onforme lutr Tbel 7 Ito gnf que montgem do tendõe n pol do ervo não pre er fet om lt urár, um vez que o tem erá lbrdo A eol d ID do ervo utlzdo pode er letór po é poível determnr onfgurção d ID trvé do oftwre e por ete motvo, ID ontd n Tbel 7 não eguem um equên lóg defnd Tbel - Pré-tenonmento do Tendõe Servo ID Elo ID Gru (º) Rotção (-)

83 8 A eol do vlore de tenonmento fo bed no poonmento do trê elo n vertl, de form que ele tngem um rgdez fnl deejd, ufente pr que o tem pudee er dpoto n vertl em pobldde de flmbgem Já pr velodde de movmentção do ervomotore, fo rd um opção de ontrole de trjetór tx jutáve, po velodde pdrão do ervo é lt A tx de trnmão eold omo defult fo de endereço X, ou ej, BPS Um nterfe fo deenvolvd em LbVew (Fg ) que relz lbrção e pré-tenonmento do tendõe Fgur Interfe de Clbrção N Fgur pode e notr que o vlore d Tbel 7, referente à poção nl do tenonmento do bo, podem er lterdo e redefndo Apó o pré-tenonmento relzdo, o mnpuldor p ter um poonmento nl defndo O ropol etá em metro, o Bud Rte egue relção preentd n Tbel 6, Poção Inl é reltv à poção deejd de d ervo motor (vrndo de té ) e Velodde do Motore egue relção de :, em rpm, ou ej, velodde máxm de orreponde, proxmdmente, rpm A Fgur 6 lutr o mnpuldor pré-tenondo, onde pode er obervdo que o mnpuldor pou um onfgurção nl n vertl, em erro gnftvo

84 8 Fgur 6 Poção Inl do Mnpuldor Em egud, fo deenvolvdo um oftwre pr relzr o ontrole de movmentção pr o DoF do mnpuldor n ferrment LbVew O oftwre em quetão fo deenvolvdo utlzndo um reuro do LbVew, mdo MtLb Srpt, onde é poível nerr ln de ódgo do MtLb no LbVew De form, fo poível nerr o Jobno enontrdo pr um elo om vértebr no LbVew Com o ntuto de reduzr o uto omputonl, o nvé de lulr

85 8 o Jobno no LbVew, ete fo luldo no MtLb e em egud nerdo no oftwre n mem form que é preentdo n Eq O vlor de r é de,9x - m, é,67x - m, m é,x - m, e o vlor de é de,x - m Apó rção de um função de álulo do Jobno de vértebr, fo rd outr função pr ompor o Jobno do mnpuldor, o qul é ompoto por elo de vértebr d Um ponto que deve er notdo é que o e tur o elo, o tendõe do elo egunte tmbém devem er tudo de form não erem relxdo ou tenondo exevmente por motvo de movmentção do mnpuldor Io oorre po o tem é opldo, e movmentção de um elo requer que o tendõe do elo egunte ejm ondo Fgur 7 Tendõe no Elo Conegunte A Fgur 7 lutr o que oorrer e pen o tendõe de elo foem movmentdo Note que o dem tendõe em um do ldo frm relxdo, e do outro ldo obre-tenondo, nvblzndo o ontrole ou dnfndo etrutur Pr evtr o, fo rd um função que lul o Jobno
86 86 ompleto do mnpuldor, onderndo que d entrd do DoF (θ, θ ou d ) em um elo fetm o DoF do egunte A função em quetão fo deenvolvd pr o o em etudo, ou ej, um mnpuldor om elo e d elo ontendo vértebr Entretnto, el é de mple entendmento e pode er expndd pr qulquer quntdde de elo e vértebr neeár Fo deenvolvd um função (GetID) pr eleonr ID do ervo er tudo trvé do nome do elo e do ervo De form, fo rd um tbel om ID orgn de d ervomotor que relon o ervomotor om u poção de tução no mnpuldor A Tbel 8 lutr ID e u relçõe Apó er rd mtrz de ID, fo defnd nomenltur utlzd pr fzer dtnção do ervomotore Inlmente, é derto o elo e, em egud, o ervo, ou ej, EloX ServoY, onde X vr entre e e Y entre e Tbel - Relção entre ID e Elo Servo Servo Servo Servo Elo 8 Elo 9 7 Elo 8 Apó eleção do ervomotore, fo elbordo um progrm que defne poção nl de pré-tenonmento De form, pode-e defnr poção de tenonmento n nlzção do oftwre e, em egud, om um pertr de botão, todo o ervomotore ão tudo té poção etbeled Pr nr o progrm fo rdo um botão Com ete botão, é tvd função dxl_ntlze, onde e verfm e onexõe entre o ervomotore e o USBDynmxel etão orret e verf e exte tenão elétr em todo o ervomotore Ao preonr ete botão, ele mud eu peto pr, o qul o er ldo, ger fnlzção do

87 87 progrm A fnlzção do oftwre onte em levr todo o ervomotore à poção zero, em pré-tenonmento No progrm tmbém é preentd poção tul do ervomotore, bem omo ngulção e o delomento pldo em d um do DoF O botão tem omo fnldde tvr lterçõe relzd n ngulçõe e velodde É preentd um brr de progreão om o ntuto de gurdr tod ntruçõe erem envd e reebd entre o tem Enqunto oorre progreão, o tem mpoblt utlzção d nterfe om o ntuto de evtr perd de ddo ou entrd ndevd durnte omunção O progrm preent trê opçõe de vrção de DoF pr d elo O omndo D_tet e D_tet lterm ngulção do DoF θ e θ, enqunto que o omndo D_prm lter vrção em d A Fgur 8 preent tel prnpl do progrm, lutrndo o texto expltvo nterore O Anexo VII preent progrmção prnpl relzd pr o deenvolvmento do oftwre Fgur 8 Tel Prnpl do Softwre de Controle
88 88 Apó o deenvolvmento dete progrm, o mnpuldor fo tetdo pr relzr um omprção entre o DoF deejdo e o obtdo Form relzdo dvero tete de form verfr repetbldde do tem, bem omo u preão Pr relzção do tete, fo deenvolvd um be pr uporte de âmer fotográf pr verfção do poonmento em D Ete proedmento pode er dotdo por er um nále etát, e não e fzendo, por o neeáro utlzção de medçõe em tempo rel d extremdde undo âmer de vídeo Pr um melor nále do reultdo, fo nerdo um lvo longdo n extremdde do mnpuldor om o ntuto de preentr um uperfíe retlíne e, m, poder lulr o ângulo gerdo pel extremdde do mnpuldor e onequentemente relzr omprção om o ângulo deejdo Tmbém fo luldo o erro perentul E % (Eq ) onde E exp é o vlor expermentl enontrdo e E de é o vlor teóro deejdo, pr d medd ( E E ) exp de de E% () E A rotçõe deejd em d (D_Tet e D_Tet) form defnd pelo vlore dreto ±,rd, ±,rd e ±,rd, o que ger um ângulo em d vértebr por elo de ±, rd, ±,7rd e ±, rd, repetvmente A entrd no mnpuldor dvergem d vrção em θ e θ pelo fto de o elo pour vértebr Det form, o vlor de entrd é dvddo pelo número de vértebr do elo, fzendo m om que o ângulo tmbém o ej Pr relzr medção do ângulo gerdo, fo utlzdo um reuro omputonl que mul um trnferdor É um oftwre lvre mdo Sle, que permte que o uuáro nr um régu ou trnferdor dgtl n tel do omputdor, pobltndo o álulo de medd e ângulo, vde Fgur 9 A régu pode er utlzd em dver el pré-defnd, t omo pxel, m, polegd, e outr Et ferrment tmbém pou um lup eletrôn, o Deenvolvdo pelo PD Rrdo Sgrllo ttp://wwwgrllonet/letm
, oneguu-e egr um omprção entre o vlore deejdo e o meddo Fgur 9 Medçõe (Retedo e om ±,rd no Elo ) A tbel e preentmo reultdo enontrdo pr D_Tet e D_Tet no tete relzdo O vlore")
89 89 que flt o orreto poonmento Com o uxílo do trnferdor dgtl, fo poível lulr ngulçõe gerd d vrção de entrd dert O erro máxmo de medção é º, ou ej,,rd Apó relzção de 7 tete ndvdu pr trê entrd e pr o do DoF (D_Tet e D_Tet), oneguu-e egr um omprção entre o vlore deejdo e o meddo Fgur 9 Medçõe (Retedo e om ±,rd no Elo ) A tbel e preentmo reultdo enontrdo pr D_Tet e D_Tet no tete relzdo O vlore enontrdo pr vrçõe de θ ão preentdo n tbel e o vlore pr θ, n Tbel O vlore d olun Poção Deejd e Poção Medd etão em rdno Pode er obervdo que o reultdo enontrdo pr o elo e etão dentro de um mrgem de erro etável vrndo entre % e %, o erro qudráto médo, enqunto que o pr o elo o erro médo f entre % % Ete fto e deve ondção do efeto d grvdde Um form de orrgr ete problem é nerção de um ontrole de ml fed no tem À frente, erá preentd um mulção umndo um ontrole por torque omputdo dete mnpuldor que exeut orreção dete erro
90 9 Tbel - Vrçõe de θ Elo Elo Tete Tete Tete Tete Poção Deejd,,9 -,7,,9 -,7,,9,,7,9 -,7,,,967 -,,6,,,7,,,7,967 -,,6,,8 -,7,8,89,,9,6,8,8,,6,7 -, -,9,,7 -,9 -,7, -,9 -,7, -,9,,7 -, -,967 -,,6 -,,,7 -,,,7 -,967 -,,6 -, -,66 -,9,67 -,89,,9 -,6,8,8 -,8 -,7,8,,9 -,7,,9,,7,9 -,7,,9,,7,,967 -,,6,967 -,,6,79 -,7,,,,7,,8 -,7,8,89,,9,6,8,8,8 -,7,8 -, -,9 -,7, -,9 -,7, -,9 -,7, -,9,,7 -, -,6,9,8 -,79 -,7, -,,,7 -,967 -,,6 -, -,89,,9 -,66 -,9,67 -,,6,7 -,8 -,7,8,,7 -,9,7,7 -,9,7,7 -,9,7,7 -,7,,,69 -,,66, -,78,78, -,78,78, -,78,78,,967 -,8,6, -,7,9,6 -,6,, -,7,9 -, -,7 -,9,7 -,7 -,7, -,7 -,7, -,7 -,7, -, -, -,78,78 -,69 -,,66 -, -,78,78 -,9 -,, -, -,6 -,6, -,79 -,,6 -,967 -,8,6 -,79 -,,6 Poção Deejd Poção Medd Poção Medd Erro Perentul Erro Perentul Erro Aboluto Tete Tete 6 Tete 7 Anále Erro Aboluto Poção Medd Poção Medd Erro Perentul Erro Perentul Erro Aboluto Erro Aboluto Poção Medd Poção Medd Erro Perentul Erro Perentul Erro Aboluto Erro Aboluto Poção Medd Devo Pdrão Erro Perentul Vrân,,9,,7,9 -,7,,9 -,7,,8,,,,,7,967 -,,6,79 -,7,,,,,8 -,7,8,8 -,7,8,8 -,7,8,, -, -,9 -,7, -,9 -,7, -,9,,7,9, -, -,79 -,7, -,79 -,7, -,967 -,,6,, -, -,66 -,9,67 -,66 -,9,67 -,,6,7,8,8,,9 -,7,,9,,7,9 -,7,,9,,,967 -,,6,967 -,,6,967 -,,6,,,,89,,9,8 -,7,8,8 -,7,8,, -, -,9 -,7, -,9 -,7, -,9,,7,8, -, -,967 -,,6 -,967 -,,6 -,967 -,,6,66, -, -,8 -,7,8 -,89,,9 -,,6,7,9,,,7 -,9,7,7 -,9,7,7 -,9,7,66,,, -,78,78,68 -,9,9, -,78,78,,,, -,7,9,6 -,6,,6 -,6,,, -, -,7 -,9,7 -,7 -,7, -,7 -,9,7,9, -, -, -,78,78 -,69 -,,66 -,69 -,,66,, -, -,6 -,6, -,967 -,8,6 -, -,7,9,, Erro Aboluto
91 9 Tbel - Vrçõe de θ Elo Elo Poção Deejd,,9,,7,9,,7,9,,7,9 -,7,,,967 -,,6,,,7,,,7,967 -,,6,,89,,9,89,,9,8 -,7,8,,6,7 -, -,9,,7 -,9,,7 -,9 -,7, -,9,,7 -, -,967 -,,6 -,,,7 -,,,7 -,967 -,,6 -, -,66 -,9,67 -,89,,9 -,89,,9 -,8 -,7,8,,9 -,7,,9,,7,9 -,7,,9,,7,,967 -,,6,967 -,,6,6,9,8,,,7,,8 -,7,8,89,,9,6,8,8,6,8,8 -, -,9 -,7, -,9 -,7, -,9 -,7, -,9,,7 -, -,6,9,8 -,79 -,7, -,6,9,8 -,967 -,,6 -, -,89,,9 -,66 -,9,67 -,89,,9 -,8 -,7,8,,7 -,9,7,7 -,7,,7 -,9,7,7 -,7,,,69 -,,66,68 -,9,9, -,78,78, -,78,78,,967 -,8,6, -,7,9,6 -,6,, -,7,9 -, -,7 -,9,7 -,7 -,7, -,7 -,7, -,7 -,7, -, -,9 -,, -,69 -,,66 -, -,78,78 -,9 -,, -, -,967 -,8,6 -,79 -,,6 -,967 -,8,6 -,79 -,,6 Poção Deejd Poção Medd Poção Medd Tete Erro Perentul Tete Tete 6 Tete 7 Anle Erro Perentul Erro Aboluto Erro Aboluto Poção Medd Poção Medd Tete Tete Tete Erro Perentul Erro Perentul Erro Aboluto Erro Aboluto Poção Medd Poção Medd Erro Perentul Erro Perentul Erro Aboluto Erro Aboluto Poção Medd Devo Pdrão Erro Perentul Vrân,,9,,7,9 -,7,,9,,7,8,,,967 -,,6,967 -,,6,79 -,7,,,,,8 -,7,8,8 -,7,8,89,,9,7, -, -,9 -,7, -,9 -,7, -,9,,7,9, -, -,,,7 -,79 -,7, -,967 -,,6,, -, -,66 -,9,67 -,66 -,9,67 -,,6,7,,6,,9 -,7,,9,,7,9,,7,9,,,967 -,,6,6,9,8,,,7,7,,,89,,9,8 -,7,8,8 -,7,8,,6 -, -,9,,7 -,9,,7 -,9,,7,9, -, -,6,9,8 -,967 -,,6 -,967 -,,6,9, -, -,66 -,9,67 -,89,,9 -,,6,7,,6,,7 -,7,,7 -,9,7,7 -,9,7,9,,, -,78,78,68 -,9,9,68 -,9,9,,,, -,7,9,6 -,6,, -,7,9,, -, -,7 -,9,7 -,7 -,7, -,7 -,9,7,9, -, -,9 -,, -,69 -,,66 -,69 -,,66,, -, -,6 -,6, -,967 -,8,6 -,967 -,8,6,7, Erro Aboluto
92 9 Apó verfçõe do poonmento etáto terem do exeutd, fo deenvolvd um mulção de ontrole pr o mnpuldor O ntuto nl er relzr lgun tete plndo grvdde pr o mnpuldor n orzontl e exeução muld de um determnd tref demontrndo u rterít Inlmente, fo deenvolvdo um progrm no MtLb om o ntuto de mulr o efeto d grvdde Utlzndo toolbox Robot, fo poível deenvolver tod nále neeár pr mulr o mnpuldor A toolbox permte rção de um mnpuldor prtr de um mtrz ontendo o D-H ou de um form m omplet, onde e defne elo por elo, ndndo e o memo é prmáto ou rottvo, nlundo, tmbém, vlore t omo, peo de d elo, entro de m, mtrz de nér, redução utlzd entre elo, nér do tudore, trto voo e trto de Coulomb, entre outro Além do, é poível lulr nemát dret e/ou nver om pen um omndo (fkne e kne, repetvmente), bem omo o Jobno em relção à be, dnâm dret, dnâm nver, mtrz de nér, forç de Corol, nerr o efeto d grvdde, entre dver outr opçõe onforme lutr o Anexo IX Pr rção d mulção no Smulnk, fo utlzdo o ontrole de torque omputdo O ontrole de torque omputdo é bedo n ompenção dnâm do mnpuldor e tem omo objetvo, deobrr dnâm lner e deopld em um tem de ml fed pr ompenr vrçõe não levd em ont pelo modelo dnâmo, devd o erro de etmção, trto, vrçõe n rg, entre outr Am, é poível ontrolr d junt ndependentemente Além d mplementção d lnerzção e do deoplmento dnâmo, é nerdo um ontroldor lner om relmentção Proporonl-Dervtv, om o ntuto de fltrr perturbçõe e orrgr devo n trjetór eold A Fgur exemplf le de ontrole por torque omputdo, onde o ímbolo de * tem o gnfdo de deejdo Deenvolvd por Peter Corke ttp://wwwpeterorkeom/robot_toolboxtml
93 9 Fgur Ml de Controle por Torque Computdo Pr o deenvolvmento de um mulção do mnpuldor no MtLb, fo utlzd toolbox Robot e, prtr del, pode-e ontrur um robô deenvolvdo trvé do prâmetro de D-H preentdo n Tbel, onde d elo nd um DoF d vértebr Form trbuíd repetv m reltv d omponente (vde pítulo ), de form que pr θ, θ e θ form umd metde d m de um membrn e pr θ, fo trbuído o vlor de metde d membrn m m do nel, enqunto que pr o d, fo trbuído o vlor d m d olun O vlor de metde d m d membrn é nerdo devdo o DoF, θ e θ, pertenerem pen um membrn e pouírem m dtrbuíd unformemente D mem form pr o θ e θ O entro de m e mtrz de nér, pr d DoF, form nerdo n ontrução do mnpuldor Seu repetvo vlore form obtdo, trvé de nále relzd no SoldWork A trnmão, bem omo nér do ervomotore, tmbém, form dotd Tmbém fo nerd um pequen tx de trto eo pr ndr o trto entre o tendõe e o omponente do mnpuldor Além d rção do mnpuldor, fo rd outr função que ger mtrz de rgdez do tem Como rgdez em d é muto uperor à enontrd pr o outro DoF, n ordem de m, el erá umd omo tendendo nfnto, pr que ej poível relzr um mulção oerente Logo, fo poível deenvolver um progrm pr relzr mulção do tem tudo pen om forç d grvdde Pr que repot pouíem um melor vulzção, form feto tete om o mnpuldor n dreção de z e, tmbém, om ele n dreção de x A Fgur lutr o mnpuldor obre efeto d grvdde om be rotond em 9º, em dreção o exo x (relzd no MtLb) e, um nále de delomento relzd no Smulton


94 9 Fgur Grvdde Et nále pode er omprd om o mnpuldor rel A be do mnpuldor rel fo olod n dreção do exo x Am, fo poível fzer um omprção entre ngulção d mulção e ngulção do expermento A mulção preentou um urvtur de proxmdmente 9º, enqunto que, pr o expermento, urvtur enontrd fo de º O erro é onderdo dentro do dmível, po o erro d repot gerd pelo progrm Sle é de º Pr o ontrole de torque omputdo, fo utlzdo o Smulnk om funçõe d toolbox Robot e o progrm deenvolvdo pr rção do modelo do mnpuldor no MtLb A Fgur preent o dgrm de bloo utlzdo pr gerção d mulção
95 9 Fgur Controle por Torque Computdo A função jtrj pou prâmetro que nluem o vlore n e fn de d elemento, no o, o DoF e o tempo de movmentção A velodde nl e fnl ão determnd omo zero A função rne Reurve Newton- Euler omput dnâm nver do mnpuldor v lgortmo reurvo de Newton-Euler A função lrgdez fo um função deenvolvd pr nerr mtrz de rgdez no tem, enqunto função mnpuldor é o robô rdo no MtLb, om u repetv rterít Tmbém ão preentdo do bloo, onde podem er obervdo em tempo rel, o vlore que o progrm trbu o DoF e, tmbém, um íd om todo o ddo d mulção (mout) Um prmer mulção fo relzd de form onferr medd obtd pelo expermento práto Inlmente, fo muld um plção om entrd de θ de,rd no elo, egundo Fgur, que lutr repot enontrd


96 96 Fgur Repot Smulção,rd Pode er obervdo que ngulção gerd pel mulção (8 ) et dentro d fx enontrd expermentlmente (vrndo entre e º) Anexo VIII Um egund nále fo relzd o plr,rd em θ e pode-e obervr que repot é mlr o tete nteror, porém, no entdo do exo x, o que verf que o DoF de θ e θ etão deopldo Com o ntuto de preentr um funonldde prát, fo pend um tref em que utlzção de um mnpuldor trdonl foe lmtd, devdo u etrutur Imgnou-e um x fed, om lgun objeto erem retrdo, em eu nteror, dentro de um pn de rejeto rdotvo, o que nvblz entrd de ere umno no lol Extem outro objeto obre x, mpobltndo um retrd d x do mbente rdotvo A x preent um bertur em um de u extremdde e, no eu nteror, extem lgum por que prem er retrd, por lgum motvo qulquer A Fgur lutr x, objeto e por Fgur Ilutrção do Problem
97 97 Aumndo que dmenõe e poonmento do objeto ão dênto o d Fgur, pode-e trçr um trjetór pr que um mnpuldor po pturr por Um mnpuldor trdonl não onegue exeutr tref devdo o pequeno epço de trblo, e, tmbém, não onegue obter ngulçõe neeár pr relzção d urv pr que e egue té por Am, um mnpuldor ontínuo pode er utlzdo no lugr de um mnpuldor trdonl Pr relzção d tref, pode-e utlzr um ROV ubmrno om um mnpuldor ontínuo remoto, tudo por tendõe, opldo em u etrutur Todo o tem de ontrole e o tudore do mnpuldor ontínuo, podem etr ftdo d pn rdotv, gerndo meno trblo n fe de deontmnção e, tmbém, menor número de poíve rejeto Como o objetvo é exemplfr o trblo do mnpuldor deenvolvdo em um tref prát, erão muldo o po do mnpuldor té que e egue o objeto deejdo Inlmente, omente o elo erá tudo potvmente de form evtr olão om o prmero objeto Em egud, o elo erá tudo om mem ngulção que o elo utlzou n prmer etp, enqunto que o elo p reeber um tução negtv, om o ntuto de evtr oldr tnto om prede d x qunto om o novo objeto u frente A últm etp é tução do elo, que reebe mem ngulção utlzd pelo elo n etp, o elo reebe ngulção que o elo etv utlzndo n etp e, fnlmente, o elo reebe um ngulção potv, egndo té por Net terer etp, o elo, tmbém, reebe um pequen nlnção negtv, perpendulr à ngulçõe nterore, pr que o mnpuldor po egr n ltur d por Pr relzr retrd d por do lol, bt relzr o proedmento nvero Fo utlzdo, pr lulr o ângulo neeáro pr exeutr d etp, o progrm Sle A Fgur 7 lutrm o ângulo neeáro


98 98 Fgur Ângulo d Etp Fgur 6 Ângulo d Etp

99 99 Fgur 7 Ângulo d Etp Logo, form relzd onverõe neeár de gru pr rdno e, de ordo o ddo d Tbel 9, que preent ngulçõe d entrd pr d DoF, d etp fo muld no progrm deenvolvdo no MtLb Tbel - Entrd pr Relzção d Etp Etp Etp Etp Elo Elo Elo Elo Elo Elo Elo Elo Elo θ, ,66, ,78 -,66,9778 θ ,876 d A Fgur 8, 9 e 6 preentm o reultdo obtdo pel mulçõe



100 Fgur 8 Etp Fgur 9 Etp Fgur 6 Etp A Fgur 6 lutr ngulçõe gerd em d etp d mulção A prmer mgem (equerd uperor) é reltv à etp I, enqunto que, o eu ldo, etp II e du mgen n prte nferor, lutrm o ângulo preentdo n Fgur 6
, etão bem próxm d ngulçõe enontrd n mulção (Tb ), logo tref, teormente, pode er exeutd Vle lentr que ete")
101 Etp Etp Etp Fgur 6 Ângulo Meddo O ângulo meddo n mulção form o preentdo n Tbel Tbel -6 Ângulo d Smulção Etp Etp Etp Elo Elo Elo Elo Elo Elo Elo Elo Elo θ, ,698,977 -,78 -,698,977 θ ,698 d Pode-e obervr que om ngulçõe eold nterormente (Tb 9), etão bem próxm d ngulçõe enontrd n mulção (Tb ), logo tref, teormente, pode er exeutd Vle lentr que ete proedmento é um mulção e que no proedmento expermentl, o reultdo pode er dferente devdo forç extern que não form nld net mulção
102 6 Conluõe e Trblo Futuro 6 Contrbuçõe nete Trblo Et dertção preent o deenvolvmento de um protótpo pr um mnpuldor ontínuo, tudo por tendõe, que pode relzr dvero tpo de tref, nluve em lo de dfíl eo e de ro à vd umn, t omo áre rdotv e om tempertur elevd Apreentou-e rterzção de lgun tpo de tem robóto, om ênfe no tem que trblm n áre relond energ e áre nópt o ere umno; o oneto de mnpuldore ontínuo, pontndo u vntgen e devntgen obre mnpuldore trdon; explção do tem redundnte e per-redundnte relondo mnpuldore A prtr d, form omentdo lgun mnpuldore que pertenem o grupo de etudo dete trblo e que pouem rterít de nm omo referên de funonmento Atrvé de nále e etudo, fo deenvolvdo um modelo do tem propoto no oftwre SoldWork, onde puderm er verfd dver rterít do mnpuldor nte de u ontrução Fo poível rr um ml de Elemento Fnto e relzr lgun tete envolvendo rgdez de omponente e relzr etmtv de m, nér, dmenonmento do mnpuldor e poonmento de omponente no tem ompleto Pr ungem d peç e ontrução do protótpo, form deenvolvdo deeno téno epeífo Explrm-e oneto báo de nemát e trnformçõe omogêne, bem omo, o oneto d notção de Denvt-Hrtenberg Relzou-e trvé d utlzção det notção, modelgem do tem Deenvolveu-e um tén de nále onde, o e nlr um onjunto de omponente, que ão repldo o longo do mnpuldor, pode-e egr um nále do mnpuldor ompleto De mner, o protótpo não f lmtdo o
103 número de elo tu e pode pour qunto elo forem neeáro, bem omo o tmno de d elo pode er eoldo onforme needde Apó modelgem, fo nd fe de ontrução fí do tem, ujo omponente form deenvolvdo n ofn d PUC-Ro, endo rdo de form que pudeem er repldo om fldde pr mnter o objetvo de forneer modulrdde o mnpuldor Detlrm-e nformçõe do protoolo de omunção, onde form deenvolvd funçõe pr relzr omunção entre o tudore e o omputdor, uj funçõe permtem que um uuáro le e ontrole o etdo do tudore em tempo rel, o que vblz tomd de deõe pr relzção de movmento Deenvolveu-e, tmbém, um progrm que relz o prétenonmento do tendõe no mnpuldor, e o ontrole do tudore, trvé d entrd de ângulo Algun expermento form relzdo om o ntuto de verfr mulçõe Relzou-e, tmbém, um mulção om utlzção d tén de ontrole por torque omputdo, onde pode-e orrgr o erro de poonmento enontrdo no expermento Por fm, fo delzd um plção do tem em um pn de rejeto rdotvo e um mulção de poonmento do mnpuldor Pelo fto de o protótpo deenvolvdo er verátl, modulr, leve e podendo er tudo remotmente, ele pode er pldo em dver tref, não e lmtndo omente o etor energéto 6 Sugetõe pr trblo futuro Algun peto om o ntuto de melor no deenvolvmento do mnpuldor podem er ugerdo O poonmento do tudore tulmente ger um ângulo entre pol e be do mnpuldor que pode er reduzdo, om o ntuto de redução do trto entre ete A pol pode pour um ângulo de debte, em u extremdde, mor, po o tul tmbém ger trto deneeáro entre pol e o tendõe Pode er deenvolvd um tén pr rção do orrugdo n membrn
104 que ej utomtzd e que gere orrugdo que dênto Além do, note que últm vértebr pode pour um deeno epel pr o oplmento de eóro pr exeução de tref, o que poder er etuddo poterormente Ete trblo preentou repot tftór pr nále nemát tnto muld qunto expermentl Trblo futuro podem nlur nále dnâm, tnto muld qunto experment O tudore utlzdo, per de nformrem que pouem enore de torque, de fto não pouem, endo portnto, nterente nluão de enore de poção o longo do mnpuldor pr relzção de um ontrole expermentl (de poção) que não depend de um modelgem etát do tem
105 7 Bblogrf Anderon, VV, Horn, RC Tenor-rm Mnpultor degn, ASME Trn, Vol 67-DE-7, pp, 967 Anombe, Rolnd, et l Snke-rm Robot Condut Nuler Mntenne Interntonl Yout Nuler Congre 6 A, Pedro F C B Crterzção de Atudore Bedo em Múulo Artf Polméro por Efeto Cptvo Dertção (metrdo) Pontfí Unverdde Ctól do Ro de Jnero, Deprtmento de Engenr Meân pp, 7 Bleng, Mrl e Wlker, In D Novel Contnuum Robot wt Vrble Lengt Seton IFAC Sympoum on Metron Sytem Brndt, G, et l CRIGOS: ompt robot for mge-guded ortoped urgery IEEE Trnton on Informton Tenology n Bomedne pp 6, 999 Brone, Leono, Butmnte, Pul e Sern, Mguel A Wll-lmbng robot for npeton n nuler power plnt IEEE Interntonl Conferene on Robot nd Automton pp 9, 99 Bukngm, Rob, et l Snke-rm robot: new ppro to rrft embly SAE AeroTe Congre, 7 Crkjn, GS Teory nd Applton of Hyper-Redundnt Robot Mnpultor, PD Dertton, Deprtment of Appled Men, Dvon of Engneerng nd Appled Sene, Clforn Inttute of Tenology, 99 Crkjn, GS e Burdk, JW Degn nd Experment wt DOF Robot IEEE Conferene on Robot nd Automton, pge 9, 99 Dve, J B C, et l Sube Applton of Contnuum Robot Interntonl Sympoum on Underwter Tenology Vol, 7, 998 Dunlop, G R e Jone, T P Poton nly of two DOF prllel menm-te Cnterbury trker Menm nd Mne Teory, pp 99 6, 999 Hnnn, Mel W, Wlker, In D Novel Knemt for Contnuum Robot, 7t Interntonl Sympoum on Advne n Robot Knemt, Sloven, pp 7-8, Hnnn, Mel W, Wlker, In D Te `elepnt trunk' mnpultor, degn nd mplementton IEEE/ASME Interntonl Conferene on Advned Intellgent Metron, pg -9,
106 6 Hnnn, Mel W, Wlker, In D Knemt nd te mplementton of n elepnt' trunk mnpultor nd oter ontnuum tyle robot Journl of Robot Sytem pp -6, Hller, Mnfred, et l Degn Anly nd Relzton of Prllel Tendonbed Mnpultor Menm nd Mne Teory, pp 9-, Hroe, S, Umetn, Y Knemt Control of Atve Cord Menm wt Ttle Senor Proeedng of Seond Interntonl CISM-IFT Sympoum on Teory nd Prte of Robot nd Mnpultor pp -, 976 Hroe, S, Yokom, K, M, S DOF Mory Drve for Hyper Redundnt Mnpultor Proeedng, IROS 9, pp 7-7B, 99 Hroe, S Bologlly Inpred Robot Oxford Unverty Pre 99 Immeg, G nd Antonell, K Te KSI Tentle Mnpultor Interntonl Conferene on Robot nd Automton pp9-99 Jone, Bryn A e Wlker, In D Knemt for multeton ontnuum robot IEEE Trnton on Robot nd Automton Vol, 6 Jone, Bryn A e Wlker, In D Lmtng-e Anly of Contnuum Trunk Knemt IEEE Interntonl Conferene on Robot nd Automton, 7 Koby, H, Smemur, E, Suzuk, K A Dtrbuted Control for Hyper Redundnt Mnpultor Proeedng, IROS 9, pp 98-96, 99 Lljebäk, Pål; Stvdl, Øyvnd; Petteren, Krtn Y Modulr Pneumt Snke Robot: D Modellng, Implementton And Control Modelng, Identfton nd Control Volume 9, pp -8, 8 MMn, Wllm, Jone, Bryn, Wlker, In D, Ctrkrn, Vl, Sedr, Arjun e Dwon, Drren Robot Mnpultor Inpred by Ceplopod Lmb CDEN Degn Conferene, Montrel, MMn, Wllm, Jone, Bryn, Wlker, In D Degn nd Implementton of Mult-Seton Contnuum Robot: Ar-Otor, IEEE/RSJ Interntonl Conferene IROS, pg 78 8, Merlet, J P Prllel Robot Sprnger, 6 Mgd, G e Kyrkopoul, Kontntno J Degn nd Fowrd Knemt Anly of Robot Snke In proeedng of te IEEE Internton Conferene on Robot nd Automton pg 9-98, 997 Nkmur, N; Sekgu, M; Kwm, K; Fujt, T; Kgw, T Developng robot rm ung pneumt rtfl rubber mule Bt Workop on Power Trnmon & Moton Control Pljug, E, Om, T, e Hyt, S Te JPL Serpentne Robot: DOF Sytem for Inpeton IEEE Conferene on Robot nd Automton, 8, 99
107 7 Robnon, Grm e Dve, Jon B C Contnuum Robo - A Stte of te Art IEEE Interntonl Conferene on Robot nd Automton pp 89-8, 999 Sk, N Swe, Y Murkm, T A Development of Jont Menm of Robot Arm Bed on Humn Soulder Menm IEEE/RAS-EMBS Interntonl Conferene on Bomedl Robot nd Bometron pg , 6 Sofno, Felpe, S Deenvolvmento de um Elo Pneumáto de Gru de Lberdde pr Mnpuldore Flexíve Dertção (metrdo) Pontfí Unverdde Ctól do Ro de Jnero, Deprtmento de Engenr Meân 6 Sdow Robot Compny Degn of Dextrou Hnd for dvned CLAWAR Profeonl Engneerng Publton Som, M, et l Bone-mounted mnture robot for urgl proedure: Conept nd lnl pplton IEEE Trnton on Robot nd Automton, pp 89-9, Spong, Mrk W, Hutnon, Set e Vdygr, M Robot Dynm nd Control Robot Dynm nd Control l : Jon Wley & Son, 989 Sutkorn, Jkrt Bnry Hyper-Redundnt Robot Mnpultor Conept IEEE Regon Conferene, pg 6-68 Vol, Tompon, C J e Cmpbell, P D Tendon upended pltform robotus Ptent 877 Unted Stte, 996 T, Lung-Wen 999 Robot Anly: Te Men of Serl nd Prllel Mnpultor Jon Wley & Son, 999 US Army Center for Tnk Reer 8 ttp://wwwforg/ Federton of Amern Sentt [Onlne] 8 [Ctdo em: de Juno de 8] ttp://wwwforg/mn/dod-/rmy/do/tmp98/e6d_tm Wlker, ID, Hnnn, MW A Novel Elepnt' Trunk Robot IEEE/ASME Int Conf on Advned Intellgent Metron, pp -, 999 Wlker, ID Some ue n retng nvertebrte robot Interntonl Sympoum on Adptve Moton of Anml nd Mne Cnd Wkmoto, Su, et l A Mro Snke-lke Robot for Smll Ppe Inpeton Interntonl Sympoum on Mrometron nd Humn Sene Wlon, JF L, D, Cen, Z George, RT Flexble Robot Mnpultor nd Grpper: Reltve of Elepnt Trunk nd Squd Tentle Robot nd Bologl Sytem: Towrd New Bon? pp Wolf, A, et l A Moble Hyper Redundnt Menm for Ser nd Reue Tk Intl Conferene on Intellgent Robot nd Sytem Ymmoto, Snj Development of Inpeton Robot for Nuler Pover Plnt Interntonl Conferene on Robot nd Automton 99
108 8 8 Anexo I Deeno Téno d Peç do Mnpuldor II Propredde Meân d Peç do Mnpuldor III Dteet murt SV IV Códgo CNC V Códgo do Protoolo de Trnmão VI Cbeçlo de Funçõe VII Progrmção no LbVew VIII Tbel de Reultdo IX Funçõe Toolbox Robot
109 9 Anexo I Deeno Téno d Peç do Mnpuldor Deeno Téno d Colun
110 Deeno Téno do Anel
111 Deeno Téno d Membrn
112 Deeno Téno d Be do Mnpuldor
113 Deeno Téno d Pol



114 Anexo II Propredde Meân d Peç Utlzd no Mnpuldor



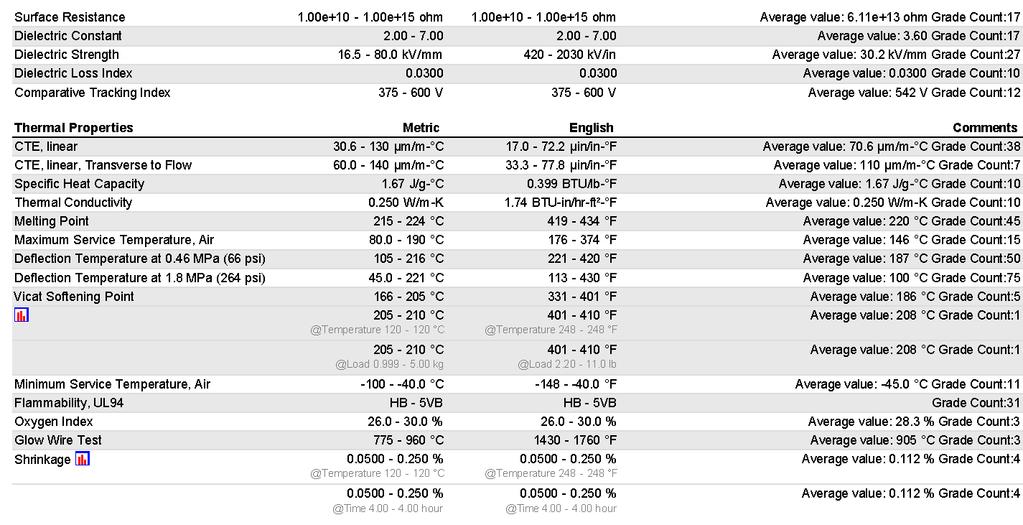
115



116 6


117 7

118 8 Anexo III Dteet murt SV

119 9



120


121
122 Anexo IV Códgo CNC A olun dert egur form gerd om o ntuto de mplfr progrmção pr ungem A olun Ln orreponde o número d ln que et endo trbuído um omndo e o poonmento, olun Comndo nere o omndo er exeutdo pel máqun opertrz CNC, olun X, Y e Z referem-e o poonmento deejdo que erá exeutdo pelo omndo nerdo n mem ln e, olun Comentáro é um lol pr reentr omentáro no ódgo (deve etr empre entre prêntee, pr que o progrm um que for nerdo um omentáro e não um ntrução) Todo o ódgo fo deenvolvdo em G-Code pr utlzção n CNC d mr Serlne Furção d Colun Ln Comndo X Y Z Comentáro (Colun ) N T7 (Bro de mm) N G X Y Z N G X Y686 Z N G X Y686 Z-6 N G X Y686 Z N6 G X Y Z N7 G X Y Z-6 N8 G X Y Z N9 G X686 Y Z N G X686 Y Z-6 N G X686 Y Z N G X Y Z N G X Y Z-6 N G X Y Z (Colun ) N G X Y Z N6 G X Y686 Z N7 G X Y686 Z-6 N8 G X Y686 Z N9 G X Y Z N G X Y Z-6
123 N G X Y Z N G X786 Y Z N G X786 Y Z-6 N G X786 Y Z N G X Y Z N6 G X Y Z-6 N7 G X Y Z (Colun ) N8 G X Y Z N9 G X76 Y686 Z N G X76 Y686 Z-6 N G X76 Y686 Z N G X76 Y Z N G X76 Y Z-6 N G X76 Y Z N G X6886 Y Z N6 G X6886 Y Z-6 N7 G X6886 Y Z N8 G X8 Y Z N9 G X8 Y Z-6 N G X8 Y Z (Colun ) N G X Y Z N G X Y786 Z N G X Y786 Z-6 N G X Y786 Z N G X Y Z N6 G X Y Z-6 N7 G X Y Z N8 G X686 Y Z N9 G X686 Y Z-6 N G X686 Y Z N G X Y Z N G X Y Z-6 N G X Y Z (Colun ) N G X Y Z N G X Y786 Z N6 G X Y786 Z-6 N7 G X Y786 Z N8 G X Y Z N9 G X Y Z-6 N6 G X Y Z N6 G X786 Y Z
124 N6 G X786 Y Z-6 N6 G X786 Y Z N6 G X Y Z N6 G X Y Z-6 N66 G X Y Z (Colun 6) N67 G X Y Z N68 G X76 Y786 Z N69 G X76 Y786 Z-6 N7 G X76 Y786 Z N7 G X76 Y Z N7 G X76 Y Z-6 N7 G X76 Y Z N7 G X6886 Y Z N7 G X6886 Y Z-6 N76 G X6886 Y Z N77 G X8 Y Z N78 G X8 Y Z-6 N79 G X8 Y Z (Colun 7) N8 G X Y Z N8 G X Y6886 Z N8 G X Y6886 Z-6 N8 G X Y6886 Z N8 G X Y8 Z N8 G X Y8 Z-6 N86 G X Y8 Z N87 G X686 Y76 Z N88 G X686 Y76 Z-6 N89 G X686 Y76 Z N9 G X Y76 Z N9 G X Y76 Z-6 N9 G X Y76 Z (Colun 8) N9 G X Y Z N9 G X Y6886 Z N9 G X Y6886 Z-6 N96 G X Y6886 Z N97 G X Y8 Z N98 G X Y8 Z-6 N99 G X Y8 Z N G X786 Y76 Z N G X786 Y76 Z-6 N G X786 Y76 Z N G X Y76 Z N G X Y76 Z-6 N G X Y76 Z (Colun 9)
125 N6 G X Y Z N7 G X76 Y6886 Z N8 G X76 Y6886 Z-6 N9 G X76 Y6886 Z N G X76 Y8 Z N G X76 Y8 Z-6 N G X76 Y8 Z N G X6886 Y76 Z N G X6886 Y76 Z-6 N G X6886 Y76 Z N6 G X8 Y76 Z N7 G X8 Y76 Z-6 N8 G X8 Y76 Z Furção do Anel Ln Comndo X Y Z Comentáro (Colun ) N T7 (Bro de mm) N G X Y Z N G X Y9 Z N G X Y9 Z- N G X Y9 Z N6 G X Y88 Z N7 G X Y88 Z- N8 G X Y88 Z N9 G X9 Y Z N G X9 Y Z- N G X9 Y Z N G X88 Y Z N G X88 Y Z- N G X88 Y Z N T8 (Bro de mm) N6 G X Y7 Z N7 G X Y7 Z-7 N8 G X Y7 Z N9 G X98 Y98 Z N G X98 Y98 Z-7 N G X98 Y98 Z N G X7 Y Z N G X7 Y Z-7 N G X7 Y Z
126 6 N G X7 Y7 Z N6 G X7 Y7 Z-7 N7 G X7 Y7 Z N8 G X7 Y98 Z N9 G X7 Y98 Z-7 N G X7 Y98 Z N G X89 Y Z N G X89 Y Z-7 N G X89 Y Z N G X7 Y89 Z N G X7 Y89 Z-7 N6 G X7 Y89 Z N7 G X7 Y7 Z N8 G X7 Y7 Z-7 N9 G X7 Y7 Z N G X89 Y7 Z N G X89 Y7 Z-7 N G X89 Y7 Z N G X Y89 Z N G X Y89 Z-7 N G X Y89 Z N6 G X98 Y7 Z N7 G X98 Y7 Z-7 N8 G X98 Y7 Z N9 G X7 Y7 Z N G X7 Y7 Z-7 N G X7 Y7 Z (Colun ) N T7 (Bro de mm) N G X Y Z N G X Y Z N G X Y Z- N6 G X Y Z N7 G X Y887 Z N8 G X Y887 Z- N9 G X Y887 Z N6 G X9 Y67 Z N6 G X9 Y67 Z- N6 G X9 Y67 Z N6 G X88 Y67 Z N6 G X88 Y67 Z- N6 G X88 Y67 Z N66 T8 (Bro de mm) N67 G X Y9 Z N68 G X Y9 Z-7 N69 G X Y9 Z
127 7 N7 G X98 Y Z N7 G X98 Y Z-7 N7 G X98 Y Z N7 G X7 Y78 Z N7 G X7 Y78 Z-7 N7 G X7 Y78 Z N76 G X7 Y9 Z N77 G X7 Y9 Z-7 N78 G X7 Y9 Z N79 G X7 Y Z N8 G X7 Y Z-7 N8 G X7 Y Z N8 G X89 Y78 Z N8 G X89 Y78 Z-7 N8 G X89 Y78 Z N8 G X7 Y89 Z N86 G X7 Y89 Z-7 N87 G X7 Y89 Z N88 G X7 Y79 Z N89 G X7 Y79 Z-7 N9 G X7 Y79 Z N9 G X89 Y7678 Z N9 G X89 Y7678 Z-7 N9 G X89 Y7678 Z N9 G X Y89 Z N9 G X Y89 Z-7 N96 G X Y89 Z N97 G X98 Y79 Z N98 G X98 Y79 Z-7 N99 G X98 Y79 Z N G X7 Y7678 Z N G X7 Y7678 Z-7 N G X7 Y7678 Z (Colun ) N T7 (Bro de mm) N G X Y Z N G X67 Y Z N6 G X67 Y Z- N7 G X67 Y Z N8 G X67 Y887 Z N9 G X67 Y887 Z- N G X67 Y887 Z N G X Y67 Z N G X Y67 Z- N G X Y67 Z N6 G X888 Y67 Z
128 8 N6 G X888 Y67 Z- N6 G X888 Y67 Z N66 T8 (Bro de mm) N67 G X7 Y9 Z N68 G X7 Y9 Z-7 N69 G X7 Y9 Z N7 G X98 Y Z N7 G X98 Y Z-7 N7 G X98 Y Z N7 G X7 Y78 Z N7 G X7 Y78 Z-7 N7 G X7 Y78 Z N76 G X767 Y9 Z N77 G X767 Y9 Z-7 N78 G X767 Y9 Z N79 G X79 Y Z N8 G X79 Y Z-7 N8 G X79 Y Z N8 G X89 Y78 Z N8 G X89 Y78 Z-7 N8 G X89 Y78 Z N8 G X767 Y89 Z N86 G X767 Y89 Z-7 N87 G X767 Y89 Z N88 G X79 Y79 Z N89 G X79 Y79 Z-7 N9 G X79 Y79 Z N9 G X89 Y7678 Z N9 G X89 Y7678 Z-7 N9 G X89 Y7678 Z N9 G X7 Y89 Z N9 G X7 Y89 Z-7 N96 G X7 Y89 Z N97 G X98 Y79 Z N98 G X98 Y79 Z-7 N99 G X98 Y79 Z N G X7 Y7678 Z N G X7 Y7678 Z-7 N G X7 Y7678 Z (Colun ) N T7 (Bro de mm) N G X Y Z N G X67 Y9 Z N G X67 Y9 Z- N G X67 Y9 Z N6 G X67 Y88 Z N7 G X67 Y88 Z-
129 9 N8 G X67 Y88 Z N9 G X Y Z N G X Y Z- N G X Y Z N G X888 Y Z N G X888 Y Z- N G X888 Y Z N T8 (Bro de mm) N6 G X7 Y7 Z N7 G X7 Y7 Z-7 N8 G X7 Y7 Z N9 G X98 Y98 Z N G X98 Y98 Z-7 N G X98 Y98 Z N G X7 Y Z N G X7 Y Z-7 N G X7 Y Z N G X767 Y7 Z N6 G X767 Y7 Z-7 N7 G X767 Y7 Z N8 G X79 Y98 Z N9 G X79 Y98 Z-7 N G X79 Y98 Z N G X89 Y Z N G X89 Y Z-7 N G X89 Y Z N G X767 Y89 Z N G X767 Y89 Z-7 N6 G X767 Y89 Z N7 G X79 Y7 Z N8 G X79 Y7 Z-7 N9 G X79 Y7 Z N G X89 Y7 Z N G X89 Y7 Z-7 N G X89 Y7 Z N G X7 Y89 Z N G X7 Y89 Z-7 N G X7 Y89 Z N6 G X98 Y7 Z N7 G X98 Y7 Z-7 N8 G X98 Y7 Z N9 G X7 Y7 Z N G X7 Y7 Z-7 N G X7 Y7 Z

130 Anexo V Códgo do Protoolo de Trnmão mnul Tbel de ódgo de omunção do ervomotor AX-, retrdo de eu
131 Anexo VI Cbeçlo de Funçõe Nete nexo, ão preentdo o beçlo d funçõe rd pr omunção entre o ervo e o omputdor nt dxl_ntlze( ); vod dxl_termnte( ); nt dxl_get_bud( ); vod dxl_et_bud(nt budnum); vod dxl_et_txpket_d(nt d); vod dxl_et_txpket_ntruton(nt ntruton); vod dxl_et_txpket_prmeter(nt índex, nt vlue); vod dxl_et_txpket_lengt(nt lengt); nt dxl_get_rxpket_error(nt errbt); nt dxl_get_rxpket_lengt( ); nt dxl_get_rxpket_prmeter(nt ndex); nt dxl_mkeword(nt lowbyte, nt gbyte); nt dxl_get_lowbyte(nt word); nt dxl_get_gbyte(nt word); vod dxl_tx_pket( ); vod dxl_rx_pket( ); vod dxl_txrx_pket( ); vod dxl_get_reult( ); vod dxl_png(nt d); nt dxl_red_byte(nt d, nt ddre); vod dxl_wrte_byte(nt d, nt ddre, nt vlue); nt dxl_red_word(nt d, nt ddre); vod dxl_wrte_word(nt d, nt ddre, nt vlue);

132 Anexo VII Progrmção no LbVew Nete nexo, é preentd progrmção prnpl do oftwre deenvolvdo pr o ontrole d vrçõe d entrd do DoF A ordem d mgen é relond à preenç do loop n progrmção
133
134
135
136 6

137 7

138 8
139 9
140


141
F ds = mv dv. U F θds. Dinâmica de um Ponto Material: Trabalho e Energia Cap. 14. = 2 s1
 4. Trblho de um orç MECÂNICA - DINÂMICA Dinâmi de um Ponto Mteril: Trblho e Energi Cp. 4 Prof Dr. Cláudio Curotto Adptdo por: Prof Dr. Ronldo Medeiro-Junior TC07 - Meâni Gerl III - Dinâmi 4. Prinípio do
4. Trblho de um orç MECÂNICA - DINÂMICA Dinâmi de um Ponto Mteril: Trblho e Energi Cp. 4 Prof Dr. Cláudio Curotto Adptdo por: Prof Dr. Ronldo Medeiro-Junior TC07 - Meâni Gerl III - Dinâmi 4. Prinípio do
Capítulo 4. Vetores. Recursos com copyright incluídos nesta apresentação:
 Cpítulo 4 Vetores Reursos om oprght nluídos nest presentção: Grndes eslres: mss, volume, tempertur,... Epresss por um número e undde Grndes vetors: deslomento, forç,... Requerem módulo, dreção, sentdo
Cpítulo 4 Vetores Reursos om oprght nluídos nest presentção: Grndes eslres: mss, volume, tempertur,... Epresss por um número e undde Grndes vetors: deslomento, forç,... Requerem módulo, dreção, sentdo
direção um elemento da segurança ativa do veículo www.eurecar.org Direção assistida eléctrica Eixos traseiros Introdução direcionais Notas técnicas 14
 4 A vão tulzd em novçõe no etor utomóvel Edção 4 / brl de 2015 dreção um elemento d egurnç tv do veíulo Net edção Introdução 2 Dreção td 5 elétr Exo trero 10 dreon Dreção td Avr 12 hdrául 3 Not tén 14
4 A vão tulzd em novçõe no etor utomóvel Edção 4 / brl de 2015 dreção um elemento d egurnç tv do veíulo Net edção Introdução 2 Dreção td 5 elétr Exo trero 10 dreon Dreção td Avr 12 hdrául 3 Not tén 14
Introdução. Introdução. Introdução Cinemática direta vs. Cinemática inversa. Introdução. Introdução Cinemática direta vs. Cinemática inversa
 4/4/6 à Robóta Cnemáta dreta rof. Dougla G. Maharet dougla.maharet@d.ufmg.br Dnâma Etuda o relaonamento entre o movmento e a força e torque que o auaram No ao de manpuladore Dado o movmento do manpulador,
4/4/6 à Robóta Cnemáta dreta rof. Dougla G. Maharet dougla.maharet@d.ufmg.br Dnâma Etuda o relaonamento entre o movmento e a força e torque que o auaram No ao de manpuladore Dado o movmento do manpulador,
Resposta de Modelos Dinâmicos Variáveis de estado
 epot de Modelo Dinâmio Vriávei de etdo Outro Proeo de Seprção Prof Ninok Bojorge Deprtmento de Engenri uími e de Petróleo UFF ontrole Feedbk... ontinução ontroldor G tudor G V POESSO G P G Senor Introdução
epot de Modelo Dinâmio Vriávei de etdo Outro Proeo de Seprção Prof Ninok Bojorge Deprtmento de Engenri uími e de Petróleo UFF ontrole Feedbk... ontinução ontroldor G tudor G V POESSO G P G Senor Introdução
ANÁLISE DE ESTRUTURAS I
 IST - DECvl Deprtmento de Engenhr Cvl NÁISE DE ESTRUTURS I Tels de nálse de Estruturs Grupo de nálse de Estruturs IST, 0 Formuláro de es IST - DECvl Rotções: w w θ θ θ θ n θ n n Relção curvtur-deslocmento:
IST - DECvl Deprtmento de Engenhr Cvl NÁISE DE ESTRUTURS I Tels de nálse de Estruturs Grupo de nálse de Estruturs IST, 0 Formuláro de es IST - DECvl Rotções: w w θ θ θ θ n θ n n Relção curvtur-deslocmento:
ROUPEIRO BARI 6 PORTAS
 P () 59-5050 v. Jesus andian, -. Mangueira Rural - EP 500-000 - Ubá - MG E-mail: qualidade@moveisnovohorizonte.com.br ROUPERO R PORT LT.: 50mm LRG.: 700mm PROF.: 555 mm URT NO PÁGN NO FEOOK LNK O LDO (R
P () 59-5050 v. Jesus andian, -. Mangueira Rural - EP 500-000 - Ubá - MG E-mail: qualidade@moveisnovohorizonte.com.br ROUPERO R PORT LT.: 50mm LRG.: 700mm PROF.: 555 mm URT NO PÁGN NO FEOOK LNK O LDO (R
Universidade do Vale do Rio dos Sinos UNISINOS Programa de Pós-Graduação em Engenharia Mecânica. Ajuste de equações
 Unversdde do Vle do Ro dos Snos UNISINOS Progrm de Pós-Grdução em Engenhr Mecânc Ajuste de equções Ajuste de curvs Técnc usd pr representr crcterístcs e comportmento de sstems térmcos. Ddos representdos
Unversdde do Vle do Ro dos Snos UNISINOS Progrm de Pós-Grdução em Engenhr Mecânc Ajuste de equções Ajuste de curvs Técnc usd pr representr crcterístcs e comportmento de sstems térmcos. Ddos representdos
Algumas considerações iniciais:
 Progrm d álulo d otmzção do n d ntrd íd do oltor olr trvé d orrlçõ r rd d rg m lnh lzd. lgum ondrçõ n: Condçõ d orção do fludo: t modlção não v lvr m ont vrçõ d tmrtur ud lo trto l borção do lor rovnnt
Progrm d álulo d otmzção do n d ntrd íd do oltor olr trvé d orrlçõ r rd d rg m lnh lzd. lgum ondrçõ n: Condçõ d orção do fludo: t modlção não v lvr m ont vrçõ d tmrtur ud lo trto l borção do lor rovnnt
ANÁLISE DA DISTRIBUIÇÃO DA FREQUÊNCIA MENSAL DE PRECIPITAÇÃO PARA A CIDADE DE PELOTAS, RS.
 ANÁLISE DA DISTRIBUIÇÃO DA FREQUÊNCIA MENSAL DE PRECIPITAÇÃO PARA A CIDADE DE PELOTAS, RS. Cml Pnho Slver Bolt o Progrm Epecl e Trenmento (PET) - Fc. Met - UFPEL Cx Potl 354, CEP 9619. e-ml: cmlp@zz.com.br
ANÁLISE DA DISTRIBUIÇÃO DA FREQUÊNCIA MENSAL DE PRECIPITAÇÃO PARA A CIDADE DE PELOTAS, RS. Cml Pnho Slver Bolt o Progrm Epecl e Trenmento (PET) - Fc. Met - UFPEL Cx Potl 354, CEP 9619. e-ml: cmlp@zz.com.br
Solução: Por equilíbrio: F A + F B = 20 kn (1) Pela restrição de deslocamento total de A até C: (2)
 Pela restrição de deslocamento total de A até C: (2)") eitêni do Mterii xeríio de rr ttimente Indetermind x. -5 rr de ço motrd n figur o ldo tem um diâmetro de 5. l é rigidmente fixd à prede e, nte de er rregd, há um folg de entre prede e extremidde d rr.
eitêni do Mterii xeríio de rr ttimente Indetermind x. -5 rr de ço motrd n figur o ldo tem um diâmetro de 5. l é rigidmente fixd à prede e, nte de er rregd, há um folg de entre prede e extremidde d rr.
Solução Algébrica vs. Geométrica Exemplos em Robôs Industriais Exercícios Recomendados Bibliografia Recomendada
 SEM7 - Aul Cemát Iver de Muldore Robóto Prof. Dr. Mrelo Beker EESC - USP Sumáro d Aul Defçõe Solução Algébr v. Geométr Eemlo em Robô Idutr Eerío Reomeddo Bblogrf Reomedd EESC-USP M. Beker 7 / Defçõe Cemát
SEM7 - Aul Cemát Iver de Muldore Robóto Prof. Dr. Mrelo Beker EESC - USP Sumáro d Aul Defçõe Solução Algébr v. Geométr Eemlo em Robô Idutr Eerío Reomeddo Bblogrf Reomedd EESC-USP M. Beker 7 / Defçõe Cemát
Solução da segunda lista de exercícios
 UESPI Cmpu Pof. Alende Alve de Olve Cuo: ch. em Cênc d Computção Dcpln: Fíc 9h Pof. Olímpo Sá loco: Aluno: Dt: 9// Solução d egund lt de eecíco Quetão : N fgu, um fo eto de compmento tnpot um coente. Obte:
UESPI Cmpu Pof. Alende Alve de Olve Cuo: ch. em Cênc d Computção Dcpln: Fíc 9h Pof. Olímpo Sá loco: Aluno: Dt: 9// Solução d egund lt de eecíco Quetão : N fgu, um fo eto de compmento tnpot um coente. Obte:
Cinemática de Corpos Rígidos Cinética de Corpos Rígidos Métodos Newton-Euler Exemplos. EESC-USP M. Becker /67
 SEM004 - Aul Cnemátc e Cnétc de Corpos Rígdos Prof. Dr. Mrcelo Becker SEM - EESC - USP Sumáro d Aul ntrodução Cnemátc de Corpos Rígdos Cnétc de Corpos Rígdos Métodos Newton-Euler Eemplos EESC-USP M. Becker
SEM004 - Aul Cnemátc e Cnétc de Corpos Rígdos Prof. Dr. Mrcelo Becker SEM - EESC - USP Sumáro d Aul ntrodução Cnemátc de Corpos Rígdos Cnétc de Corpos Rígdos Métodos Newton-Euler Eemplos EESC-USP M. Becker
EESC-USP M. Becker 2008 2/64
 SEM7 - Aula Cnemáta Dreta de Manpuladore Robóto Prof. Dr. Marelo Beker EESC - USP Sumáro da Aula Epaço de Trabalho Quetõe Cnemáta Repreentação da Orentação Matrz de Tranformação Homogênea Equaçõe Cnemáta
SEM7 - Aula Cnemáta Dreta de Manpuladore Robóto Prof. Dr. Marelo Beker EESC - USP Sumáro da Aula Epaço de Trabalho Quetõe Cnemáta Repreentação da Orentação Matrz de Tranformação Homogênea Equaçõe Cnemáta
COMPENSAÇÃO ANGULAR E REMOÇÃO DA COMPONENTE DE SEQÜÊNCIA ZERO NA PROTEÇÃO DIFERENCIAL
 SHWETZER ENGNEERNG LORTORES, OMERL LTD OMPENSÇÃO NGULR E REMOÇÃO D OMPONENTE DE SEQÜÊN ZERO N PROTEÇÃO DFERENL RFEL RDOSO ntrodução O prinípio d proteção diferenil é de que som ds orrentes que entrm n
SHWETZER ENGNEERNG LORTORES, OMERL LTD OMPENSÇÃO NGULR E REMOÇÃO D OMPONENTE DE SEQÜÊN ZERO N PROTEÇÃO DFERENL RFEL RDOSO ntrodução O prinípio d proteção diferenil é de que som ds orrentes que entrm n
PARTE I. Figura Adição de dois vetores: C = A + B.
 1 PRTE I FUNDENTS D ESTÁTIC VETRIL estudo d estátc dos corpos rígdos requer plcção de operções com vetores. Estes entes mtemátcos são defndos pr representr s grndes físcs que se comportm dferentemente
1 PRTE I FUNDENTS D ESTÁTIC VETRIL estudo d estátc dos corpos rígdos requer plcção de operções com vetores. Estes entes mtemátcos são defndos pr representr s grndes físcs que se comportm dferentemente
COMPENSAÇÃO ANGULAR E REMOÇÃO DA COMPONENTE DE SEQÜÊNCIA ZERO NA PROTEÇÃO DIFERENCIAL DE TRANSFORMADORES
 SHWETZER ENGNEERNG LORTORES, OMERL LTD OMPENSÇÃO NGULR E REMOÇÃO D OMPONENTE DE SEQÜÊN ZERO N PROTEÇÃO DFERENL DE TRNSFORMDORES Por Rfel rdoso. NTRODUÇÃO O prinípio d proteção diferenil é de que som ds
SHWETZER ENGNEERNG LORTORES, OMERL LTD OMPENSÇÃO NGULR E REMOÇÃO D OMPONENTE DE SEQÜÊN ZERO N PROTEÇÃO DFERENL DE TRNSFORMDORES Por Rfel rdoso. NTRODUÇÃO O prinípio d proteção diferenil é de que som ds
Revisão de Matemática Simulado 301/302. Fatorial. Análise combinatória
 Revsão de Mtemátc Smuldo / Ftorl Eemplos: )! + 5! =! b) - Smplfcr (n+)! (n-)! b) Resolv s equções: (+)! = Permutção Smples Análse combntór Permutções são grupmentos com n elementos, de form que os n elementos
Revsão de Mtemátc Smuldo / Ftorl Eemplos: )! + 5! =! b) - Smplfcr (n+)! (n-)! b) Resolv s equções: (+)! = Permutção Smples Análse combntór Permutções são grupmentos com n elementos, de form que os n elementos
Apresenta-se em primeiro lugar um resumo da simbologia adoptada no âmbito da determinação de funções interpoladoras.
 CAPÍTUO 7 FUÇÕES ITERPOADORAS ete pítulo ão derito divero modo de obtenção de funçõe interpoldor, tmbém deignd funçõe de form. São preentdo eemplo reltivo meio unidimenioni, bidimenioni e tridimenioni.
CAPÍTUO 7 FUÇÕES ITERPOADORAS ete pítulo ão derito divero modo de obtenção de funçõe interpoldor, tmbém deignd funçõe de form. São preentdo eemplo reltivo meio unidimenioni, bidimenioni e tridimenioni.
3 MATERIAIS, PROCEDIMENTOS EXPERIMENTAIS e ANÁLISE DE DADOS.
 44 3 MATERIAIS PROCEDIMENTOS EXPERIMENTAIS e ANÁLISE DE DADOS. Neste pítulo são presentdos os mters utlzdos e os métodos empregdos pr relzção do presente trlho que fo desenvolvdo no Lortóro de Termoêns
44 3 MATERIAIS PROCEDIMENTOS EXPERIMENTAIS e ANÁLISE DE DADOS. Neste pítulo são presentdos os mters utlzdos e os métodos empregdos pr relzção do presente trlho que fo desenvolvdo no Lortóro de Termoêns
log = logc log 2 x = a https://ueedgartito.wordpress.com P2 logc Logaritmos Logaritmos Logaritmos Logaritmos Logaritmos Matemática Básica
 Mtemáti Bái Unidde 8 Função Logrítmi RANILDO LOPES Slide diponívei no noo SITE: http://ueedgrtito.wordpre.om Logritmndo Be do ritmo Logritmo Condição de Eitêni > > Logritmo Logritmo Logritmo Logritmndo
Mtemáti Bái Unidde 8 Função Logrítmi RANILDO LOPES Slide diponívei no noo SITE: http://ueedgrtito.wordpre.om Logritmndo Be do ritmo Logritmo Condição de Eitêni > > Logritmo Logritmo Logritmo Logritmndo
4. APLICAÇÃO DA PROTEÇÃO DIFERENCIAL À PROTEÇÃO DE TRANSFORMADORES DE POTÊNCIA
 lever Pereir 4. PLÇÃO D PROTEÇÃO DFEREL À PROTEÇÃO DE TRSFORMDORES DE POTÊ 4.. Prinípio ásio s orrentes primáris e seundáris de um trfo de potêni gurdm entre si um relção onheid em ondições de operção
lever Pereir 4. PLÇÃO D PROTEÇÃO DFEREL À PROTEÇÃO DE TRSFORMDORES DE POTÊ 4.. Prinípio ásio s orrentes primáris e seundáris de um trfo de potêni gurdm entre si um relção onheid em ondições de operção
Proposta de resolução do Exame Nacional de Matemática A 2016 (1 ạ fase) GRUPO I (Versão 1)
 GRUPO I (Versão 1)") Propost de resolução do Eme Nconl de Mtemátc A 06 ( ạ fse) GRUPO I (Versão ). Sbemos que P(A) =, P(B) = e P(A B) = 5 0 6 Assm, P(A B) P(A B) = = 6 P(B) 6 P(A B) = 6 0 P(A B) = 6 0 P(A B) = 0 Tem-se que
Propost de resolução do Eme Nconl de Mtemátc A 06 ( ạ fse) GRUPO I (Versão ). Sbemos que P(A) =, P(B) = e P(A B) = 5 0 6 Assm, P(A B) P(A B) = = 6 P(B) 6 P(A B) = 6 0 P(A B) = 6 0 P(A B) = 0 Tem-se que
MRUV (plano inclinado) trilho de ar com faiscador
 trilho de ar com faiscador") MRUV (plno nclndo) trlho de r com fscdor - Concetos relcondos Intervlo de tempo, posção, velocdde, celerção, celerção méd e movmento retlíneo unformemente vrdo. - Objetvos Entender os concetos de espço
MRUV (plno nclndo) trlho de r com fscdor - Concetos relcondos Intervlo de tempo, posção, velocdde, celerção, celerção méd e movmento retlíneo unformemente vrdo. - Objetvos Entender os concetos de espço
Métodos de Calibração
 Método de Clbrção Sn obtdo por equpmento e ntrumento devem er clbrdo pr evtr erro n medd. Clbrção, de cordo com o INMETRO, é o conjunto de operçõe que etbelece, ob condçõe epecfcd, relção entre o vlore
Método de Clbrção Sn obtdo por equpmento e ntrumento devem er clbrdo pr evtr erro n medd. Clbrção, de cordo com o INMETRO, é o conjunto de operçõe que etbelece, ob condçõe epecfcd, relção entre o vlore
MODELAGEM MATEMÁTICA DE SISTEMAS DE RASTREAMENTO DE VEÍCULOS
 MODELAGEM MAEMÁICA DE SISEMAS DE RASREAMENO DE VEÍCLOS Luz Crlo Fguereo Doutorno em Engenhr Elétr pelo PPGEE FMG e profeor o nletemg. RESMO Prour-e revr prnp tén utlz pr etmr poção e veíulo terretre be
MODELAGEM MAEMÁICA DE SISEMAS DE RASREAMENO DE VEÍCLOS Luz Crlo Fguereo Doutorno em Engenhr Elétr pelo PPGEE FMG e profeor o nletemg. RESMO Prour-e revr prnp tén utlz pr etmr poção e veíulo terretre be
Notas de Aula de Física
 Versão prelmnr 6 de setemro de 00 Nots de Aul de Fís 0. VETORES E ESCALARES... UM POUCO DE TRIGONOMETRIA... MÉTODO GEOMÉTRICO... MÉTODO ANALÍTICO... 3 MULTIPLICAÇÃO DE VETORES... 3 Multplção de um vetor
Versão prelmnr 6 de setemro de 00 Nots de Aul de Fís 0. VETORES E ESCALARES... UM POUCO DE TRIGONOMETRIA... MÉTODO GEOMÉTRICO... MÉTODO ANALÍTICO... 3 MULTIPLICAÇÃO DE VETORES... 3 Multplção de um vetor
MRUV (plano inclinado) trilho de ar com faiscador Trilho de ar
 trilho de ar com faiscador Trilho de ar") MRUV (plno nclndo) trlho de r com fscdor Trlho de r - Concetos relcondos Intervlo de tempo, posção, velocdde, celerção, celerção méd e movmento retlíneo unformemente vrdo. - Objetvos Entender os concetos
MRUV (plno nclndo) trlho de r com fscdor Trlho de r - Concetos relcondos Intervlo de tempo, posção, velocdde, celerção, celerção méd e movmento retlíneo unformemente vrdo. - Objetvos Entender os concetos
2 Patamar de Carga de Energia
 2 Ptmr de Crg de Energi 2.1 Definição Um série de rg de energi normlmente enontr-se em um bse temporl, ou sej, d unidde dess bse tem-se um informção d série. Considerndo um bse horári ou semi-horári, d
2 Ptmr de Crg de Energi 2.1 Definição Um série de rg de energi normlmente enontr-se em um bse temporl, ou sej, d unidde dess bse tem-se um informção d série. Considerndo um bse horári ou semi-horári, d
1- Resolução de Sistemas Lineares.
 MÉTODOS NUMÉRICOS PARA EQUAÇÕES DIFERENCIAIS PARCIAIS - Reolução de Stem Lere..- Mtrze e Vetore..- Reolução de Stem Lere de Equçõe Algébrc por Método Eto (Dreto)..3- Reolução de Stem Lere de Equçõe Algébrc
MÉTODOS NUMÉRICOS PARA EQUAÇÕES DIFERENCIAIS PARCIAIS - Reolução de Stem Lere..- Mtrze e Vetore..- Reolução de Stem Lere de Equçõe Algébrc por Método Eto (Dreto)..3- Reolução de Stem Lere de Equçõe Algébrc
UT 01 Vetores 07/03/2012. Observe a situação a seguir: Exemplos: área, massa, tempo, energia, densidade, temperatura, dentre outras.
 UT 01 Vetore Oerve itução eguir: A prtícul vermelh etá e movendo num di quente, onde o termômetro indic tempertur de 41 gru Celiu! GRANDEZA ESCALAR É um grndez fíic completmente crcterizd omente com o
UT 01 Vetore Oerve itução eguir: A prtícul vermelh etá e movendo num di quente, onde o termômetro indic tempertur de 41 gru Celiu! GRANDEZA ESCALAR É um grndez fíic completmente crcterizd omente com o
Instrução de montagem para damper corta fogo Serie FKA-TA-BR-90 FKA-TI-BR-60 FKA-TI-BR-120 FKA-A-BR-30
 TROX DO BRIL LTD. Ru Cyro Correi Pereir, 300 1170-230 Curitib - PR Fone: (41) 3316 400 Fx: (41) 3316 493 ite: www.troxbril.com.br Intrução de montgem pr dmper cort fogo erie FK-T-BR-90 FK-TI-BR-60 FK-TI-BR-120
TROX DO BRIL LTD. Ru Cyro Correi Pereir, 300 1170-230 Curitib - PR Fone: (41) 3316 400 Fx: (41) 3316 493 ite: www.troxbril.com.br Intrução de montgem pr dmper cort fogo erie FK-T-BR-90 FK-TI-BR-60 FK-TI-BR-120
ANÁLISE DE ESTRUTURAS I
 IST - DECvl Dertento de Engenr Cvl NÁISE DE ESTRUTURS I Tels de nálse de Estruturs Gruo de nálse de Estruturs IST, IST - DECvl Gruo de nálse de Estruturs Foruláro de es Eq. de grnge: w w w q D Equção de
IST - DECvl Dertento de Engenr Cvl NÁISE DE ESTRUTURS I Tels de nálse de Estruturs Gruo de nálse de Estruturs IST, IST - DECvl Gruo de nálse de Estruturs Foruláro de es Eq. de grnge: w w w q D Equção de
CÁLCULO DA INCERTEZA NAS MEDIÇÕES DE CIRCULARIDADE E DE CILINDRICIDADE COM MÁQUINAS DE MEDIR POR COORDENADAS: UM MODELO SIMPLIFICADO
 CÁLCULO A NCEEZA NAS MEÇÕES E CULAAE E E CLNCAE COM MÁQUNAS E ME O COOENAAS: UM MOELO SMLFCAO Cládo Cot So, oend Vldé Aren e ene rro Ver Sto Unverdde Federl de Uerlând, Uerlând, Brl, ldo_oto@hotml.om Unverdde
CÁLCULO A NCEEZA NAS MEÇÕES E CULAAE E E CLNCAE COM MÁQUNAS E ME O COOENAAS: UM MOELO SMLFCAO Cládo Cot So, oend Vldé Aren e ene rro Ver Sto Unverdde Federl de Uerlând, Uerlând, Brl, ldo_oto@hotml.om Unverdde
Laboratório de Circuitos Polifásicos e Magnéticos
 ortório de Ciruitos Polifásios e Mgnétios PÁTICA 3 CICUITOS TIFÁSICOS EQUIIBADOS E DESEQUIIBADOS OBJETIVOS: O ojetivo d práti é lulr orrentes/tensões em iruitos trifásios equilirdos e desequilirdos efetundo
ortório de Ciruitos Polifásios e Mgnétios PÁTICA 3 CICUITOS TIFÁSICOS EQUIIBADOS E DESEQUIIBADOS OBJETIVOS: O ojetivo d práti é lulr orrentes/tensões em iruitos trifásios equilirdos e desequilirdos efetundo
Cinemática Direta. 4 o Engenharia de Controle e Automação FACIT / Prof. Maurílio J. Inácio
 Cnemáta Deta 4 o Engenhaa de Contole e Automação FACI / 9 Pof. Mauílo J. Ináo Cnemáta Deta Cnemáta do manpulado Cnemáta é êna que tata o movmento em ondea a foça que o auam. Na nemáta ão etudado: poçõe,
Cnemáta Deta 4 o Engenhaa de Contole e Automação FACI / 9 Pof. Mauílo J. Ináo Cnemáta Deta Cnemáta do manpulado Cnemáta é êna que tata o movmento em ondea a foça que o auam. Na nemáta ão etudado: poçõe,
Duração: 1h30 Resp: Prof. João Carlos Fernandes (Dep. Física)
") ecânic e Ond O Curo LEC º TESTE 0/0 º Seetre -04-0 8h0 Durção: h0 ep: Prof João Crlo ernnde (Dep íic) TAGUS PAK Nº: Noe: POBLEA (4 vlore) U etudnte de O potou co u igo que conegui delocr u loco de kg pen
ecânic e Ond O Curo LEC º TESTE 0/0 º Seetre -04-0 8h0 Durção: h0 ep: Prof João Crlo ernnde (Dep íic) TAGUS PAK Nº: Noe: POBLEA (4 vlore) U etudnte de O potou co u igo que conegui delocr u loco de kg pen
Materiais. Corrosão e Protecção de Materiais
 Mters Corrosão e Proteção de Mters Doente: João Slvdor Fernndes Lb. de Tenolog Eletroquím Pvlhão de Mns, Pso 4 joo.slvdor@teno.ulsbo.pt Ext. 1964 Dgrms de Equlíbro E-pH (Pourbx) Comportmento de um metl
Mters Corrosão e Proteção de Mters Doente: João Slvdor Fernndes Lb. de Tenolog Eletroquím Pvlhão de Mns, Pso 4 joo.slvdor@teno.ulsbo.pt Ext. 1964 Dgrms de Equlíbro E-pH (Pourbx) Comportmento de um metl
CAPÍTULO 4: ENERGIA DE DEFORMAÇÃO
 Curso de ngenhr Cvl nversdde stdul de rngá Centro de ecnolog Deprtmento de ngenhr Cvl rof. omel Ds nderle CÍO : N D DFOÇÃO rof. omel Ds nderle. nerg de Deformção d rlho reldo pel forç durnte o longmento
Curso de ngenhr Cvl nversdde stdul de rngá Centro de ecnolog Deprtmento de ngenhr Cvl rof. omel Ds nderle CÍO : N D DFOÇÃO rof. omel Ds nderle. nerg de Deformção d rlho reldo pel forç durnte o longmento
C Sistema destinado à preparação para Concursos Públicos e Aprimoramento Profissional via INTERNET RACIOCÍNIO LÓGICO
 Pr Ordendo RACIOCÍNIO LÓGICO AULA 06 RELAÇÕES E FUNÇÕES O pr ordendo represent um ponto do sistem de eixos rtesinos. Este sistem é omposto por um pr de rets perpendiulres. A ret horizontl é hmd de eixo
Pr Ordendo RACIOCÍNIO LÓGICO AULA 06 RELAÇÕES E FUNÇÕES O pr ordendo represent um ponto do sistem de eixos rtesinos. Este sistem é omposto por um pr de rets perpendiulres. A ret horizontl é hmd de eixo
Modelagem Matemática de Sistemas Eletromecânicos
 1 9 Modelgem Mtemátic de Sistems Eletromecânicos 1 INTRODUÇÃO Veremos, seguir, modelgem mtemátic de sistems eletromecânicos, ou sej, sistems que trtm d conversão de energi eletromgnétic em energi mecânic
1 9 Modelgem Mtemátic de Sistems Eletromecânicos 1 INTRODUÇÃO Veremos, seguir, modelgem mtemátic de sistems eletromecânicos, ou sej, sistems que trtm d conversão de energi eletromgnétic em energi mecânic
Introdução aos Conversores CC-CC
 INIUO E ELERÔNICA E POÊNCIA epartamento de Engenhara Elétrca Centro ecnológco UNIERIAE FEERAL E ANA CAARINA Introdução ao Converore CCCC Reponável pelo Etudo: Clóv Antôno Petry (INEP/EEL UFC) Orentador:
INIUO E ELERÔNICA E POÊNCIA epartamento de Engenhara Elétrca Centro ecnológco UNIERIAE FEERAL E ANA CAARINA Introdução ao Converore CCCC Reponável pelo Etudo: Clóv Antôno Petry (INEP/EEL UFC) Orentador:
TEORIA DA GERAÇÃO DE QUANTUM BITS EMARANHADOS NO CAMPO TEMPORAL
 TEORIA DA GERAÇÃO DE QUANTUM BITS EMARANHADOS NO CAMPO TEMPORAL Cao Olndo de Mranda e Slva Júnor Inttuto de Cênca e Tecnologa,Unverdade Federal do Vale do Jequtnhonha e Mucur, 39100-000, Damantna MG, Bral
TEORIA DA GERAÇÃO DE QUANTUM BITS EMARANHADOS NO CAMPO TEMPORAL Cao Olndo de Mranda e Slva Júnor Inttuto de Cênca e Tecnologa,Unverdade Federal do Vale do Jequtnhonha e Mucur, 39100-000, Damantna MG, Bral
(x, y) dy. (x, y) dy =
 dy. (x, y) dy =") Seção 7 Função Gm A expressão n! = 1 3... n (1 está definid pens pr vlores inteiros positivos de n. Um primeir extensão é feit dizendo que! = 1. Ms queremos estender noção de ftoril inclusive pr vlores
Seção 7 Função Gm A expressão n! = 1 3... n (1 está definid pens pr vlores inteiros positivos de n. Um primeir extensão é feit dizendo que! = 1. Ms queremos estender noção de ftoril inclusive pr vlores
Transformações Geométricas 2D
 rnformçõe Geométric D Sitem Gráfico/ Computção Gráfic e Interfce FACULDADE DE ENGENHAIA DA UNIVESIDADE DO POO COMPUAÇÃO GÁFICA E INEFACES/ SISEMAS GÁFICOS JGB/AAS 4 rnformçõe Geométric D A trnformçõe geométric
rnformçõe Geométric D Sitem Gráfico/ Computção Gráfic e Interfce FACULDADE DE ENGENHAIA DA UNIVESIDADE DO POO COMPUAÇÃO GÁFICA E INEFACES/ SISEMAS GÁFICOS JGB/AAS 4 rnformçõe Geométric D A trnformçõe geométric
RESOLUÇÃO DA PROVA DE MATEMÁTICA UNICAMP-FASE 2. 2014 RESOLUÇÃO: PROFA. MARIA ANTÔNIA C. GOUVEIA
 RESOLUÇÃO D PROV DE MTEMÁTIC UNICMP-FSE. PROF. MRI NTÔNI C. GOUVEI. é, sem úv, o lmento refero e mutos ulsts. Estm-se que o onsumo áro no Brsl sej e, mlhão e s, seno o Esto e São Pulo resonsável or % esse
RESOLUÇÃO D PROV DE MTEMÁTIC UNICMP-FSE. PROF. MRI NTÔNI C. GOUVEI. é, sem úv, o lmento refero e mutos ulsts. Estm-se que o onsumo áro no Brsl sej e, mlhão e s, seno o Esto e São Pulo resonsável or % esse
Fluxo de Potência. 1 - Introdução
 Fluxo de Potêni Reido em etembro 7 - Introdução Fluxo de potêni é um d ferrment bái em nálie de item elétrio. A equçõe de fluxo de potêni podem er plid tnto em item de grnde porte qunto em pequen intlçõe.
Fluxo de Potêni Reido em etembro 7 - Introdução Fluxo de potêni é um d ferrment bái em nálie de item elétrio. A equçõe de fluxo de potêni podem er plid tnto em item de grnde porte qunto em pequen intlçõe.
Exemplos de pilares mistos
 Pilre Mio Exemplo de pilre mio Peri meálio reveido om beão Peri ubulre irulre heio om beão Peri meálio prilmene reveido om beão Peri ubulre heio om beão reveindo um peril bero Peri ubulre rengulre heio
Pilre Mio Exemplo de pilre mio Peri meálio reveido om beão Peri ubulre irulre heio om beão Peri meálio prilmene reveido om beão Peri ubulre heio om beão reveindo um peril bero Peri ubulre rengulre heio
SOCIEDADE PORTUGUESA DE MATEMÁTICA
 SOCIEDADE PORTUGUESA DE MATEMÁTICA Propost de Resolução do Exme de Mtemátc A - º ANO Códgo 65 - Fse - 07 - de junho de 07 Grupo I 5 6 7 8 Versão A B D A B C D C Versão D D B C C A B A Grupo II. 0 5 5 5
SOCIEDADE PORTUGUESA DE MATEMÁTICA Propost de Resolução do Exme de Mtemátc A - º ANO Códgo 65 - Fse - 07 - de junho de 07 Grupo I 5 6 7 8 Versão A B D A B C D C Versão D D B C C A B A Grupo II. 0 5 5 5
Teoria dos Jogos. Prof. Maurício Bugarin Eco/UnB 2014-I. Aula 9 Teoria dos Jogos Maurício Bugarin. Roteiro
 Teori dos Jogos Prof. Muríio Bugrin Eo/UnB -I Roteiro Cpítulo : Jogos dinâmios om informção omplet. Jogos Dinâmios om Informção Complet e Perfeit. Jogos Dinâmios om Informção Complet ms imperfeit Informção
Teori dos Jogos Prof. Muríio Bugrin Eo/UnB -I Roteiro Cpítulo : Jogos dinâmios om informção omplet. Jogos Dinâmios om Informção Complet e Perfeit. Jogos Dinâmios om Informção Complet ms imperfeit Informção
7. Circuitos (baseado no Halliday, 4 a edição)
") 7. Crcutos Cpítulo 07 7. Crcutos (bsedo no Hlldy, 4 edção) Bombemento de Crg Pr fzermos com que os portdores de crg flum trvés de um resstor, devemos ter em um dos termns um potencl (ex.: esfer de crg
7. Crcutos Cpítulo 07 7. Crcutos (bsedo no Hlldy, 4 edção) Bombemento de Crg Pr fzermos com que os portdores de crg flum trvés de um resstor, devemos ter em um dos termns um potencl (ex.: esfer de crg
Aula de solução de problemas: cinemática em 1 e 2 dimensões
 Aul de solução de problems: cinemátic em 1 e dimensões Crlos Mciel O. Bstos, Edurdo R. Azevedo FCM 01 - Físic Gerl pr Químicos 1. Velocidde instntâne 1 A posição de um corpo oscil pendurdo por um mol é
Aul de solução de problems: cinemátic em 1 e dimensões Crlos Mciel O. Bstos, Edurdo R. Azevedo FCM 01 - Físic Gerl pr Químicos 1. Velocidde instntâne 1 A posição de um corpo oscil pendurdo por um mol é
Busca. Busca. Exemplo. Exemplo. Busca Linear (ou Seqüencial) Busca em Vetores
 Busca em Vetores") Busc e etores Prof. Dr. José Augusto Brnusks DFM-FFCP-USP Est ul ntroduz busc e vetores que está entre s trefs s freqüenteente encontrds e progrção de coputdores Serão borddos dos tpos de busc: lner (ou
Busc e etores Prof. Dr. José Augusto Brnusks DFM-FFCP-USP Est ul ntroduz busc e vetores que está entre s trefs s freqüenteente encontrds e progrção de coputdores Serão borddos dos tpos de busc: lner (ou
Notas de Aula de Física
 Versão prelmnr 6 de junho de ots de ul de Físc. OMTO, TOQU MOMTO GU... OMTO... O rolmento descrto como um combnção de rotção e trnslção... O rolmento sto como um rotção pur... 3 ener cnétc... 3 TOQU...
Versão prelmnr 6 de junho de ots de ul de Físc. OMTO, TOQU MOMTO GU... OMTO... O rolmento descrto como um combnção de rotção e trnslção... O rolmento sto como um rotção pur... 3 ener cnétc... 3 TOQU...
66 FLAP INTERNACIONAL 67 FLAP INTERNACIONAL
 l c r e m l C e p ã ç t v v A l d A Br n c n ú n Cntnund cm n trblh de pequ preentm n letre qunt prte d mtér que bjetv preervr memór d vçã cmercl brler trvé d núnc d décd de tent, m um vez cntm cm clbrçã
l c r e m l C e p ã ç t v v A l d A Br n c n ú n Cntnund cm n trblh de pequ preentm n letre qunt prte d mtér que bjetv preervr memór d vçã cmercl brler trvé d núnc d décd de tent, m um vez cntm cm clbrçã
Simbolicamente, para. e 1. a tem-se
 . Logritmos Inicilmente vmos trtr dos ritmos, um ferrment crid pr uilir no desenvolvimento de cálculos e que o longo do tempo mostrou-se um modelo dequdo pr vários fenômenos ns ciêncis em gerl. Os ritmos
. Logritmos Inicilmente vmos trtr dos ritmos, um ferrment crid pr uilir no desenvolvimento de cálculos e que o longo do tempo mostrou-se um modelo dequdo pr vários fenômenos ns ciêncis em gerl. Os ritmos
Agenda Aula 2 Parte 1
 Aula Parte 1 Anále de Correlação: Coefcente de Pearon Prof. Cear Aleandre de Souza Materal deenvolvdo em conjunto com a Profa. Adrana Back Noronha Vana EAD0655 Técnca Etatítca de Projeção Agenda Aula Parte
Aula Parte 1 Anále de Correlação: Coefcente de Pearon Prof. Cear Aleandre de Souza Materal deenvolvdo em conjunto com a Profa. Adrana Back Noronha Vana EAD0655 Técnca Etatítca de Projeção Agenda Aula Parte
UFPR - DELT Medidas Elétricas Prof. Marlio Bonfim
 UFPR - DELT Medds Elétrcs Prof. Mrlo Bonfm Oscloscópo Instrumento que permte vsulzção e/ou medd do vlor nstntâneo de um tensão em função do tempo. A letur do snl é fet num tel sob form de um gráfco tensão
UFPR - DELT Medds Elétrcs Prof. Mrlo Bonfm Oscloscópo Instrumento que permte vsulzção e/ou medd do vlor nstntâneo de um tensão em função do tempo. A letur do snl é fet num tel sob form de um gráfco tensão
2 - Definições: (a) Corrente Primária Nominal (I pn ) (b) Corrente Secundária Nominal (I sn ) (c) Relação de Transformação Nominal (k n )
 Corrente Primária Nominal (I pn ) (b) Corrente Secundária Nominal (I sn ) (c) Relação de Transformação Nominal (k n )") Trfrdre de Crrete Clever Perer TRNSFORMDORES DE CORRENTE 1 - trduçã: Trfrdre de truet de edçã de rteçã TC TP e TPC Trfrdre de Crrete Fuçõe Bác - Reduzr crrete vlre egur r edçã. - lr crcut rár d ecudár.
Trfrdre de Crrete Clever Perer TRNSFORMDORES DE CORRENTE 1 - trduçã: Trfrdre de truet de edçã de rteçã TC TP e TPC Trfrdre de Crrete Fuçõe Bác - Reduzr crrete vlre egur r edçã. - lr crcut rár d ecudár.
UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA
 UNVERSDDE DE SÃO PULO ESOL POLTÉN Deprtmento de Engenhri de Estruturs e Geotécnic URSO ÁSO DE RESSTÊN DOS TERS FSÍULO Nº 5 Flexão oblíqu H. ritto.010 1 FLEXÃO OLÍU 1) udro gerl d flexão F LEXÃO FLEXÃO
UNVERSDDE DE SÃO PULO ESOL POLTÉN Deprtmento de Engenhri de Estruturs e Geotécnic URSO ÁSO DE RESSTÊN DOS TERS FSÍULO Nº 5 Flexão oblíqu H. ritto.010 1 FLEXÃO OLÍU 1) udro gerl d flexão F LEXÃO FLEXÃO
Primeira Prova de Mecânica A PME /08/2012
 SL LITÉNI UNIVRSI SÃ UL eprtmento de ngenhr Mecânc rmer rov de Mecânc M 100 8/08/01 Tempo de prov: 110 mnutos (não é permtdo o uso de dspostvos eletrôncos) r r r r r r 1º Questão (3,0 pontos) onsdere o
SL LITÉNI UNIVRSI SÃ UL eprtmento de ngenhr Mecânc rmer rov de Mecânc M 100 8/08/01 Tempo de prov: 110 mnutos (não é permtdo o uso de dspostvos eletrôncos) r r r r r r 1º Questão (3,0 pontos) onsdere o
[ η. lim. RECAPITULANDO: Soluções diluídas de polímeros. Equação de Mark-Houwink-Sakurada: a = 0.5 (solvente θ )
") RECPITULNDO: Soluções dluíds de polímeros Vsosdde tríse do polímero: 5 N V 5 (4 / 3) R 3 v h π h N v [ η ] v 5 Pode ser obtd prtr de: [ η ] lm η 0 sp / V Equção de rk-houwk-skurd: [η] K ode K e são osttes
RECPITULNDO: Soluções dluíds de polímeros Vsosdde tríse do polímero: 5 N V 5 (4 / 3) R 3 v h π h N v [ η ] v 5 Pode ser obtd prtr de: [ η ] lm η 0 sp / V Equção de rk-houwk-skurd: [η] K ode K e são osttes
Conversão de Energia I
 Deprtmento de Engenhri Elétric Conversão de Energi I Aul 5.2 Máquins de Corrente Contínu Prof. Clodomiro Unsihuy Vil Bibliogrfi FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquins Elétrics: com Introdução
Deprtmento de Engenhri Elétric Conversão de Energi I Aul 5.2 Máquins de Corrente Contínu Prof. Clodomiro Unsihuy Vil Bibliogrfi FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquins Elétrics: com Introdução
CINEMÁTICA INVERSA DE ROBÔS REDUNDANTES VIA TEORIA DE HELICÓIDES
 CINEMÁTICA INVERSA DE ROBÔS REDUNDANTES VIA TEORIA DE HELICÓIDES Henrque Sm EMC-CTC-UFSC Unvere Feerl e Snt Ctrn Cmu Unvertáro Trne C Potl 76 CEP 889- e-ml, m@lm.uf.br Dnel Mrtn EMC-CTC-UFSC Unvere Feerl
CINEMÁTICA INVERSA DE ROBÔS REDUNDANTES VIA TEORIA DE HELICÓIDES Henrque Sm EMC-CTC-UFSC Unvere Feerl e Snt Ctrn Cmu Unvertáro Trne C Potl 76 CEP 889- e-ml, m@lm.uf.br Dnel Mrtn EMC-CTC-UFSC Unvere Feerl
CPV O cursinho que mais aprova na GV
 O cursinho que mis prov n GV FGV Administrção 04/junho/006 MATEMÁTICA 0. Pulo comprou um utomóvel fle que pode ser bstecido com álcool ou com gsolin. O mnul d montdor inform que o consumo médio do veículo
O cursinho que mis prov n GV FGV Administrção 04/junho/006 MATEMÁTICA 0. Pulo comprou um utomóvel fle que pode ser bstecido com álcool ou com gsolin. O mnul d montdor inform que o consumo médio do veículo
Estabilidade para Pequenas Perturbações e Dimensionamento de Estabilizadores. Mestrado em Engenharia Electrotécnica e de Computadores _
 Etabldade para Pequena Perturbaçõe e Dmenonamento de Etablzadore Metrado em Engenhara Electrotécnca e de Computadore _ Dnâmca e Etabldade de Stema de Energa J. A. Peça Lope Conceto Teórco Repreentação
Etabldade para Pequena Perturbaçõe e Dmenonamento de Etablzadore Metrado em Engenhara Electrotécnca e de Computadore _ Dnâmca e Etabldade de Stema de Energa J. A. Peça Lope Conceto Teórco Repreentação
MT DEPARTAMENTO NACIONAL DE ESTRADAS DE RODAGEM
 MT DEARTAMENTO NACIONAL DE ESTRADAS DE RODAGEM Método de Enio ágin 1 de 5 RESUMO Ete documento, que é um norm técnic, preent o procedimento pr determinção d m epecífic prente do olo, in itu, com, plicdo
MT DEARTAMENTO NACIONAL DE ESTRADAS DE RODAGEM Método de Enio ágin 1 de 5 RESUMO Ete documento, que é um norm técnic, preent o procedimento pr determinção d m epecífic prente do olo, in itu, com, plicdo
Estabilidade Lateral de Conjuntos de Veículos de Carga
 Etldde terl de Conjunto de eíulo de Crg Rue Pentedo de Melo Trnte Engenr e npeção td DT nttuto de Pequ, noção e Deenolento Sutentáel e Trnporte OSCP Prof Dr lon Brer Prof Dr Rento Brer Pontfí Unerdde Ctól
Etldde terl de Conjunto de eíulo de Crg Rue Pentedo de Melo Trnte Engenr e npeção td DT nttuto de Pequ, noção e Deenolento Sutentáel e Trnporte OSCP Prof Dr lon Brer Prof Dr Rento Brer Pontfí Unerdde Ctól
REF Rodovia / Bom Princípio - / : Fone: / /
 REF. 101- Rodovia 122 30 / om Princípio - / : 976-000 RS KM RS EP Fone: + 1 334 8000 / www.madesa.com.br / in@madesa.com.br ROUPERO 3 PORTS DE ORRER 217 47 2310 ** ** 8 * 8 * * * 8 PESOS SUPORTDOS (em
REF. 101- Rodovia 122 30 / om Princípio - / : 976-000 RS KM RS EP Fone: + 1 334 8000 / www.madesa.com.br / in@madesa.com.br ROUPERO 3 PORTS DE ORRER 217 47 2310 ** ** 8 * 8 * * * 8 PESOS SUPORTDOS (em
Notas de Aula - Prof. Dr. Marco Antonio Pereira
 Ecol de Engenhi de Loen - UP - inétic Químic pítulo 7 Intodução etoe Químico 1 - Intodução cinétic químic e o pojeto de etoe etão no coção de que todo o poduto químico indutii. É, pinciplmente, o conhecimento
Ecol de Engenhi de Loen - UP - inétic Químic pítulo 7 Intodução etoe Químico 1 - Intodução cinétic químic e o pojeto de etoe etão no coção de que todo o poduto químico indutii. É, pinciplmente, o conhecimento
DOCEN TE. Espaç o Verde. ya Braga. Arnaldo Alvaren ga. Espaç o Verde. Espaç o Verm elho. A confirm ar. A confirm ar. 14h00/1 5h40 FALE SAL A DOCENTE
 SL D BLS RS UFMG DPRMN D FGRFI, R INM RÁRI D ULS 27/2º URS D GRDUÇÃ M R NÚL MUM º PRÍD p l ÓDI Vg DN SL 2..... f de Imprvçã I 9 2 y Brg pç Verde h/ 7h h/ 7h f de. e Dmí d Mv. 7 2 rld lvre g pç Verde h/
SL D BLS RS UFMG DPRMN D FGRFI, R INM RÁRI D ULS 27/2º URS D GRDUÇÃ M R NÚL MUM º PRÍD p l ÓDI Vg DN SL 2..... f de Imprvçã I 9 2 y Brg pç Verde h/ 7h h/ 7h f de. e Dmí d Mv. 7 2 rld lvre g pç Verde h/
ntexto finição presentação áfica ilização TempMed(input,output); Var Var Begin Begin readln(t1); readln(t1); readln(t2); readln(t2);
; Var Var Begin Begin readln(t1); readln(t1); readln(t2); readln(t2);") Arrys (tbels) Co (1) Imgine-se que é necessário efectur o cálculo d médi do primeiro trimestre do no. Com os conhecimentos presentdos té qui o progrm senvolver seri proximdmente Progrm Progrm TempMed(input,output);
Arrys (tbels) Co (1) Imgine-se que é necessário efectur o cálculo d médi do primeiro trimestre do no. Com os conhecimentos presentdos té qui o progrm senvolver seri proximdmente Progrm Progrm TempMed(input,output);
GGE RESPONDE IME 2012 MATEMÁTICA 1
 0. O segundo, o sétio e o vigésio sétio teros de u Progressão Aritéti () de núeros inteiros, de rzão r, for, nest orde, u Progressão Geoétri (PG), de rzão q, o q e r IN* (nturl diferente de zero). Deterine:
0. O segundo, o sétio e o vigésio sétio teros de u Progressão Aritéti () de núeros inteiros, de rzão r, for, nest orde, u Progressão Geoétri (PG), de rzão q, o q e r IN* (nturl diferente de zero). Deterine:
Hewlett-Packard O ESTUDO DA RETA. Aulas 01 a 05. Elson Rodrigues, Gabriel Carvalho e Paulo Luiz
 Hewlett-Pkrd O ESTUDO DA RETA Auls 01 05 Elson Rodrigues, Griel Crvlho e Pulo Luiz Sumário EQUAÇÃO GERAL DA RETA... 2 Csos espeiis... 2 Determinção d equção gerl de um ret prtir de dois de seus pontos...
Hewlett-Pkrd O ESTUDO DA RETA Auls 01 05 Elson Rodrigues, Griel Crvlho e Pulo Luiz Sumário EQUAÇÃO GERAL DA RETA... 2 Csos espeiis... 2 Determinção d equção gerl de um ret prtir de dois de seus pontos...
Física III Escola Politécnica GABARITO DA P3 24 de junho de 2010
 P3 Questão 1 Físic - 4320301 Escol Politécnic - 2010 GABARTO DA P3 24 de junho de 2010 onsidere um fio infinito percorrido por um corrente estcionári. oplnr com o fio está um espir retngulr de ldos e b
P3 Questão 1 Físic - 4320301 Escol Politécnic - 2010 GABARTO DA P3 24 de junho de 2010 onsidere um fio infinito percorrido por um corrente estcionári. oplnr com o fio está um espir retngulr de ldos e b
Matemática Básica II - Trigonometria Nota 02 - Trigonometria no Triângulo
 Mtemátic ásic II - Trigonometri Not 0 - Trigonometri no Triângulo Retângulo Márcio Nscimento d Silv Universidde Estdul Vle do crú - UV urso de Licencitur em Mtemátic mrcio@mtemticuv.org 18 de mrço de 014
Mtemátic ásic II - Trigonometri Not 0 - Trigonometri no Triângulo Retângulo Márcio Nscimento d Silv Universidde Estdul Vle do crú - UV urso de Licencitur em Mtemátic mrcio@mtemticuv.org 18 de mrço de 014
Para quantificar a variabilidade de um conjunto de dados ou medidas é que se usam medidas de dispersão. Vamos estudar algumas delas nesta aula.
 Probabldade e Etatítca I Antono Roque Aula Medda de Dperão A medda de tendênca central não ão ufcente para e caracterzar um conjunto de dado. O motvo é que ete varação na natureza, to é, dado que venham
Probabldade e Etatítca I Antono Roque Aula Medda de Dperão A medda de tendênca central não ão ufcente para e caracterzar um conjunto de dado. O motvo é que ete varação na natureza, to é, dado que venham
1 Assinale a alternativa verdadeira: a) < <
 < <") MATEMÁTICA Assinle lterntiv verddeir: ) 6 < 7 6 < 6 b) 7 6 < 6 < 6 c) 7 6 < 6 < 6 d) 6 < 6 < 7 6 e) 6 < 7 6 < 6 Pr * {} temos: ) *, * + e + * + ) + > + + > ) Ds equções (I) e (II) result 7 6 < ( 6 )
MATEMÁTICA Assinle lterntiv verddeir: ) 6 < 7 6 < 6 b) 7 6 < 6 < 6 c) 7 6 < 6 < 6 d) 6 < 6 < 7 6 e) 6 < 7 6 < 6 Pr * {} temos: ) *, * + e + * + ) + > + + > ) Ds equções (I) e (II) result 7 6 < ( 6 )
Exemplo: y 3, já que sen 2 e log A matriz nula m n, indicada por O m n é tal que a ij 0, i {1, 2, 3,..., m} e j {1, 2, 3,..., n}.
 Mrzes Mrz rel Defnção Sem m e n dos números neros Um mrz rel de ordem m n é um conuno de mn números res, dsrbuídos em m lnhs e n coluns, formndo um bel que se ndc em gerl por 9 Eemplo: A mrz A é um mrz
Mrzes Mrz rel Defnção Sem m e n dos números neros Um mrz rel de ordem m n é um conuno de mn números res, dsrbuídos em m lnhs e n coluns, formndo um bel que se ndc em gerl por 9 Eemplo: A mrz A é um mrz
20/07/15. Matemática Aplicada à Economia LES 201
 Mtemátic Aplicd à Economi LES 201 Auls 3 e 4 17 e 18/08/2015 Análise de Equilíbrio Sistems Lineres e Álgebr Mtricil Márci A.F. Dis de Mores Análise de Equilíbrio em Economi (Ching, cp 3) O significdo do
Mtemátic Aplicd à Economi LES 201 Auls 3 e 4 17 e 18/08/2015 Análise de Equilíbrio Sistems Lineres e Álgebr Mtricil Márci A.F. Dis de Mores Análise de Equilíbrio em Economi (Ching, cp 3) O significdo do
Teoria dos Jogos. Prof. Maurício Bugarin Eco/UnB 2015-II. Aula 7 Teoria dos Jogos Maurício Bugarin. Roteiro
 Teori dos Jogos Prof. Muríio Bugrin Eo/UnB 5-II Roiro Cpítulo : Jogos dinâmios om informção omplet. Jogos Dinâmios om Informção Complet e Perfeit orm exnsiv Estrtégis Equilíbrio de Nsh Subjogos e equilíbrio
Teori dos Jogos Prof. Muríio Bugrin Eo/UnB 5-II Roiro Cpítulo : Jogos dinâmios om informção omplet. Jogos Dinâmios om Informção Complet e Perfeit orm exnsiv Estrtégis Equilíbrio de Nsh Subjogos e equilíbrio
VETORES. Problemas Resolvidos
 Prolems Resolvidos VETORES Atenção Lei o ssunto no livro-teto e ns nots de ul e reproduz os prolems resolvidos qui. Outros são deidos pr v. treinr PROBLEMA 1 Dois vetores, ujos módulos são de 6e9uniddes
Prolems Resolvidos VETORES Atenção Lei o ssunto no livro-teto e ns nots de ul e reproduz os prolems resolvidos qui. Outros são deidos pr v. treinr PROBLEMA 1 Dois vetores, ujos módulos são de 6e9uniddes
 ircuit ennte de ª Ordem O md nturi, u pól, ã independente d frm de excitçã dede que incluã de excitçã nã ltere etrutur nturl d circuit. N ( X ( H ( Pól D( 0 > etrutur D( X i ( nturl crrepnde X i ( 0 Plinómi
ircuit ennte de ª Ordem O md nturi, u pól, ã independente d frm de excitçã dede que incluã de excitçã nã ltere etrutur nturl d circuit. N ( X ( H ( Pól D( 0 > etrutur D( X i ( nturl crrepnde X i ( 0 Plinómi
INTRODUÇÃO: Forma Geral dos Relatórios
 Lortóro - EXPERIMETO I METROLOGIA Mes om o pquímetro Prof.: r. Cláuo S. Srtor ITROUÇÃO: Form Gerl os Reltóros É muto esejável que sej um erno grne (formto A) put om fols enumers ou om fols enumers e quruls,
Lortóro - EXPERIMETO I METROLOGIA Mes om o pquímetro Prof.: r. Cláuo S. Srtor ITROUÇÃO: Form Gerl os Reltóros É muto esejável que sej um erno grne (formto A) put om fols enumers ou om fols enumers e quruls,
CAPÍTULO IV DIFERENCIAÇÃO NUMÉRICA
 PMR Mecânc Computconl CAPÍTULO IV DIFERENCIAÇÃO NUMÉRICA O problem de derencção numérc prentemente é semelnte o de ntegrção numérc ou sej obtendo-se um polnômo nterpoldor ou outr unção nterpoldor d unção
PMR Mecânc Computconl CAPÍTULO IV DIFERENCIAÇÃO NUMÉRICA O problem de derencção numérc prentemente é semelnte o de ntegrção numérc ou sej obtendo-se um polnômo nterpoldor ou outr unção nterpoldor d unção
DESENHO DE UM SISTEMA FINANCEIRO PARA A MELHORIA DA GESTÃO DO ENSINO, INVESTIGAÇÃO CIENTIFICA E EXTENSÃO UNIVERSITÁRIA EM ANGOLA
 DESENHO DE UM SISTEMA FINANCEIRO PARA A MELHORIA DA GESTÃO DO ENSINO, INVESTIGAÇÃO CIENTIFICA E EXTENSÃO UNIVERSITÁRIA EM ANGOLA Autor: Ale Romulo Neto Smo mol@yhoo.om.r Unere e Noemro Deprtmento e Enno
DESENHO DE UM SISTEMA FINANCEIRO PARA A MELHORIA DA GESTÃO DO ENSINO, INVESTIGAÇÃO CIENTIFICA E EXTENSÃO UNIVERSITÁRIA EM ANGOLA Autor: Ale Romulo Neto Smo mol@yhoo.om.r Unere e Noemro Deprtmento e Enno
Potencial Elétrico. Evandro Bastos dos Santos. 14 de Março de 2017
 Potencil Elétrico Evndro Bstos dos Sntos 14 de Mrço de 2017 1 Energi Potencil Elétric Vmos começr fzendo um nlogi mecânic. Pr um corpo cindo em um cmpo grvitcionl g, prtir de um ltur h i té um ltur h f,
Potencil Elétrico Evndro Bstos dos Sntos 14 de Mrço de 2017 1 Energi Potencil Elétric Vmos começr fzendo um nlogi mecânic. Pr um corpo cindo em um cmpo grvitcionl g, prtir de um ltur h i té um ltur h f,
Funções de Transferência
 Funções de Trnsferênc Em teor de controle, funções chmd funções de trnsferênc são comumente usds r crcterzr s relções de entrd-síd de comonentes ou sstems que odem ser descrtos or equções dferencs. FUNÇÃO
Funções de Trnsferênc Em teor de controle, funções chmd funções de trnsferênc são comumente usds r crcterzr s relções de entrd-síd de comonentes ou sstems que odem ser descrtos or equções dferencs. FUNÇÃO
TP062-Métodos Numéricos para Engenharia de Produção Sistemas Lineares Métodos Iterativos
 TP6-Métodos Numércos pr Egehr de Produção Sstems Leres Métodos Itertvos Prof. Volmr Wlhelm Curt, 5 Resolução de Sstems Leres Métodos Itertvos Itrodução É stte comum ecotrr sstems leres que evolvem um grde
TP6-Métodos Numércos pr Egehr de Produção Sstems Leres Métodos Itertvos Prof. Volmr Wlhelm Curt, 5 Resolução de Sstems Leres Métodos Itertvos Itrodução É stte comum ecotrr sstems leres que evolvem um grde
CAPÍTULO II INTEGRAL DE RIEMANN EM R
 CAPÍTULO II INTEGRAL DE RIEMANN EM R. Defnção e prmers propreddes Consdere-se função f () lmtd no ntervlo I = [, ] ( < ) lmtdo e fedo. Fndo pontos,,..., n-, n, em número fnto, ts que, = < < < < n- < n
CAPÍTULO II INTEGRAL DE RIEMANN EM R. Defnção e prmers propreddes Consdere-se função f () lmtd no ntervlo I = [, ] ( < ) lmtdo e fedo. Fndo pontos,,..., n-, n, em número fnto, ts que, = < < < < n- < n
A B C Para colocar letras nas figuras, escrevem-se as letras segundo o sentido contrário ao dos ponteiros do relógio.
 Ângulos e triângulos Unidde 6 PLIR 1. Oserv figur. Nos pontos e estão plntds árvores. Pretende-se plntr um árvore num ponto de modo que os pontos, e pertençm à mesm ret. z três desenhos indindo o ponto
Ângulos e triângulos Unidde 6 PLIR 1. Oserv figur. Nos pontos e estão plntds árvores. Pretende-se plntr um árvore num ponto de modo que os pontos, e pertençm à mesm ret. z três desenhos indindo o ponto
Os números racionais. Capítulo 3
 Cpítulo 3 Os números rcionis De modo informl, dizemos que o conjunto Q dos números rcionis é composto pels frções crids prtir de inteiros, desde que o denomindor não sej zero. Assim como fizemos nteriormente,
Cpítulo 3 Os números rcionis De modo informl, dizemos que o conjunto Q dos números rcionis é composto pels frções crids prtir de inteiros, desde que o denomindor não sej zero. Assim como fizemos nteriormente,
Bhaskara e sua turma Cícero Thiago B. Magalh~aes
 1 Equções de Segundo Gru Bhskr e su turm Cícero Thigo B Mglh~es Um equção do segundo gru é um equção do tipo x + bx + c = 0, em que, b e c são números reis ddos, com 0 Dd um equção do segundo gru como
1 Equções de Segundo Gru Bhskr e su turm Cícero Thigo B Mglh~es Um equção do segundo gru é um equção do tipo x + bx + c = 0, em que, b e c são números reis ddos, com 0 Dd um equção do segundo gru como
Numa progressão aritmética de 6 termos a soma dos termos de ordem ímpar é 6 e a soma dos termos de ordem par é 15. Calcule o sexto termo dessa PA.
 PROVA DE MATEMÁTICA - TURMAS DO 3 O ANO DO ENSINO MÉDIO COLÉGIO ANCHIETA-BA - SETEMBRO DE 200. ELABORAÇÃO: PROFESSORES OCTAMAR MARQUES E ADRIANO CARIBÉ. PROFESSORA MARIA ANTÔNIA C. GOUVEIA Questão. Num
PROVA DE MATEMÁTICA - TURMAS DO 3 O ANO DO ENSINO MÉDIO COLÉGIO ANCHIETA-BA - SETEMBRO DE 200. ELABORAÇÃO: PROFESSORES OCTAMAR MARQUES E ADRIANO CARIBÉ. PROFESSORA MARIA ANTÔNIA C. GOUVEIA Questão. Num
3.Redução de ruído 23
 3.Redução de ruído 3 3 Redução de ruído 3.. Algortmo NLM Como mor dos lgortmos pr redução de ruído o lgortmo NLM us o cálculo de méds como form de elmnr ruído. A dferenç está em que enqunto mor dos lgortmos
3.Redução de ruído 3 3 Redução de ruído 3.. Algortmo NLM Como mor dos lgortmos pr redução de ruído o lgortmo NLM us o cálculo de méds como form de elmnr ruído. A dferenç está em que enqunto mor dos lgortmos
EQUAÇÕES LINEARES E DECOMPOSIÇÃO DOS VALORES SINGULARES (SVD)
") EQUAÇÕES LINEARES E DECOMPOSIÇÃO DOS VALORES SINGULARES (SVD) 1 Equções Leres Em otção mtrcl um sstem de equções leres pode ser represetdo como 11 21 1 12 22 2 1 x1 b1 2 x2 b2. x b ou A.X = b (1) Pr solução,
EQUAÇÕES LINEARES E DECOMPOSIÇÃO DOS VALORES SINGULARES (SVD) 1 Equções Leres Em otção mtrcl um sstem de equções leres pode ser represetdo como 11 21 1 12 22 2 1 x1 b1 2 x2 b2. x b ou A.X = b (1) Pr solução,
LISTA DE EXERCÍCIOS #5 - ELETROMAGNETISMO I
 STA DE EXERCÍCOS #5 - EETROMAGNETSMO 1. Dds s confgurções de corrente o, otenh o cmpo mgnétco correspondente. () Fo reto e longo, percorrdo por corrente. () Solenode de seção trnsversl constnte, com n
STA DE EXERCÍCOS #5 - EETROMAGNETSMO 1. Dds s confgurções de corrente o, otenh o cmpo mgnétco correspondente. () Fo reto e longo, percorrdo por corrente. () Solenode de seção trnsversl constnte, com n
CÁLCULO DA INCERTEZA DE MEDIÇÃO NA CALIBRAÇÃO DE MEDIDAS MATERIALIZADAS DE VOLUME PELO MÉTODO GRAVIMÉTRICO
 CÁLCULO DA INCERTEZA DE MEDIÇÃO NA CALIRAÇÃO DE MEDIDAS MATERIALIZADAS DE VOLUME PELO MÉTODO GRAVIMÉTRICO NORMA N o NIE-DIMEL-043 APROVADA EM AGO/03 N o 00 0/09 SUMÁRIO Objetvo 2 Cmo Alcção 3 Resosbld
CÁLCULO DA INCERTEZA DE MEDIÇÃO NA CALIRAÇÃO DE MEDIDAS MATERIALIZADAS DE VOLUME PELO MÉTODO GRAVIMÉTRICO NORMA N o NIE-DIMEL-043 APROVADA EM AGO/03 N o 00 0/09 SUMÁRIO Objetvo 2 Cmo Alcção 3 Resosbld