SEM0 M Aul u a l a 14 Sistema de Múltiplos Corpos Sistema Pro r f. D r. r Ma M r a c r elo l Becker SEM - EESC - USP
|
|
|
- Ester Amarante Fartaria
- 6 Há anos
- Visualizações:
Transcrição

1 SEM4 - Aua 4 Sistema de Mútipos Corpos Prof. Dr. Marceo ecker SEM - EESC - USP
2 Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações /67
3 ntrodução Objetivos:» Reembrar o procedimento do cácuo de veocidades e aceerações de sistemas de Mútipos corpos;» Apresentar uma apicação do procedimento de obtenção das equações de equiíbrio dinâmico e das variáveis nea contidas. 3
4 Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações 4/67
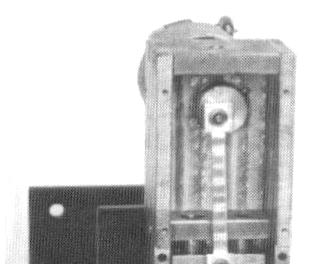

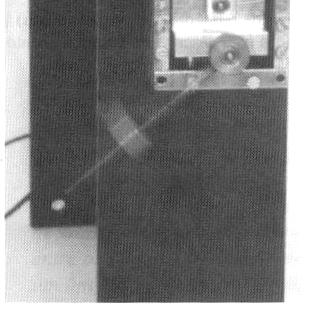
5 Apresentação do Mecanismo 5
6 Cinemática do Mecanismo. - Sistemas de Referência. - Matrizes de transformação.3 - Escrevendo os ânguos em função do ânguo de acionamento.4 - Veocidades e Aceerações dos Sistemas Móveis.5 - Veocidades e aceerações em reação ao Sistema nercia 6
7 . Sistemas de Referência Nome Tipo Eixos Cursores Origem nercia X, Y, Z i, j, k Centro do disco Móve X, Y, i, j, Z k ee Centro do disco, soidário a Móve X, Y, Z i, j, k Ponto, soidário ao corpo (braço) 3 Móve X 3, Y 3, Z 3 i 3, j 3, k 3 Ponto, soidário ao corpo 4 (pênduo) Obs: Nenhum sistema móve foi utiizado para descrever o movimento do corpo 3 (pistão) pois este é facimente descrito (transação pura) através do inercia. 7
8 . Matrizes de Transformação Sistema para base (Rotação em θ) cosθ sinθ T θ θ θ sinθ cosθ s T θ s θ > nesta posição 8
9 . Matrizes de Transformação Sistema para base (Rotação negativa em torno de Z, T cos sin sin cos com ânguo ) s T s > nesta posição 9
10 . Matrizes de Transformação Sistema para base 3 (Rotação positiva em torno de Z, cosψ sinψ T ψ ψ ψ sinψ cosψ com ânguo ψ) 3 s T ψ s ψ > nesta posição
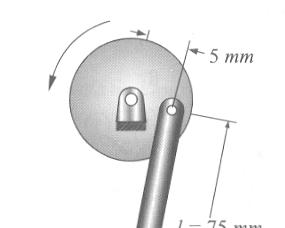
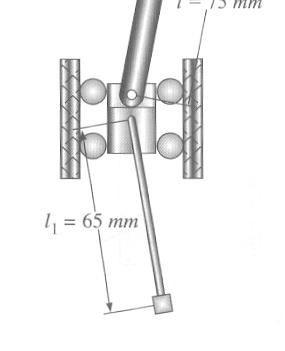
11 .3 Escrevendo os ânguos em função do ânguo de acionamento r h θ h sin θ h r sinθ r sin h r sinθ r arcsin sinθ

12 .4 Veocidades dos Sistemas Móveis Corpo Vaores conhecidos ω θ ω pois θ é constante.
13 .4 Veocidades dos Sistemas Móveis Corpo Vaores desconhecidos. Sabe-se que o corpo gira em torno de Z, no pano XY ncógnitas: e Duas possíveis souções: Peas reações trigonométricas (triânguo); Equações de veocidade e aceeração absoutas de uma base móve. 3
14 Corpo θ cos r r Definição das grandezas na forma vetoria (em reação ao Sistema nercia).4 Veocidades dos Sistemas Móveis 4 θ θ. sin r r r T r r T cos. sin T T ψ ψ ψ cos. 3 3 sin T T
15 .4 Veocidades dos Sistemas Móveis Cácuo das veocidades Do Sistema : (Veocidade absouta do ponto A, fixo no disco): v A { vo + ω roa + vre OA ω 3 r OA () v O pois a veocidade do Ponto O é zero v Re OA pois não há movimento reativo entre A e O (corpo rígido) 5
16 .4 Veocidades dos Sistemas Móveis Cácuo das veocidades Do Sistema : (Veocidade absouta do ponto A, fixo no braço): v A v + ω 3 + vre A v + ω () guaando () e (), tem-se: ω r OA v + ω 6
17 Cácuo das veocidades Escrevendo na forma matricia: k j i v k j i.4 Veocidades dos Sistemas Móveis 7 cos cos + θ θ θ sin sin r r Resovendo os determinantes: + θ θ θ θ cos cos sin v r sin r
18 .4 Veocidades dos Sistemas Móveis Cácuo das veocidades Reescrevendo na forma matricia, em função das incógnitas sin v θ r sin θ cos r θ cos θ cuja soução é: v r θ sinθ sin r θ cosθ cos sin cos r θ sin( θ + ) cos r θ sinθ r θ cosθ sin cos r θ cosθ cos 8
19 .4 - Aceerações dos Sistemas Móveis Cácuo das aceerações Do sistema : (aceeração absouta do ponto A, soidário ao disco): a A a O ω { ao + ω ω r ω r +. ω 3 vre + are 3 pois não existe movimento reativo entre o ponto O e a origem do Sist. nercia r pois ω constante v Re a Re pois a veocidade reativa do Sistema nercia com reação a ee mesmo é zero. pois a aceeração reativa do Sistema nercia com reação a ee mesmo é zero. 9
20 .4 - Aceerações dos Sistemas Móveis Cácuo das aceerações Do sistema : (aceeração absouta do ponto A, soidário ao braço): a ω A a + ω ω + +. ω + 3 vre 3 are Como o ponto A é o mesmo para os dois corpos, pode-se iguaar as aceerações: ω ω r a + ω ω + ω
21 Cácuo das aceerações Matriciamente + + cos cos cos θ θ θ θ θ sin sin k j i a r sin r k j i.4 - Aceerações dos Sistemas Móveis θ θ θ θ sin r sin r + θ θ θ θ sin sin r r a sin cos cos cos Cuja soução θ θ θ θ θ θ cos ) cos( cos cos ) ( ) cos cos ( r sin sin sin r sin r a + + θ θ θ θ θ θ cos cos ) ( ) cos cos ( sin sin r sin sin sin r r +
22 Cácuo das aceerações Do sistema 3: (aceeração absouta do ponto 3, que é a mesma da massa do pênduo): { { Re Re P a v a a ψ ψ ψ ψ.4 - Aceerações dos Sistemas Móveis { { Re Re P cos cos ψ ψ ψ ψ ψ ψ ψ sin k j i sin k j i a a P cos cos ψ ψ ψ ψ ψ ψ ψ ψ sin sin a a P + cos. 3 ψ ψ ψ ψ ψ sin a a a T a P P ase nercia ase 3


23 Dinâmica do Mecanismo Diagramas de corpo ivre Corpos e modeados como corpos rígidos Para cada corpo rígido no pano, tem-se 3 equações de equiíbrio dinâmico (duas de força e uma de momento). 3

24 Dinâmica do Mecanismo Diagramas de corpo ivre Corpos 3 e 4 modeados como partícuas Para cada partícua no pano tem-se duas equações de equiíbrio dinâmico (equações de força) 4
25 Dinâmica do Mecanismo ncógnitas: M, 3 F X, F Y, F X, FY, F3 X, F Y, N, T equações (três do corpo, três do corpo, duas do corpo 3 e duas do corpo 4): a restante se refere ao movimento do pênduo, montado na manivea. 5
26 Do corpo 4 - pênduo (base 3): Forças atuantes: cos ψ ψ ψ sin g m g m P T P g m P Dinâmica Dinâmica do Mecanismo do Mecanismo ψ ψ ) ( 3 T T
 sinψ (eq.")
27 Dinâmica do Mecanismo Do corpo 4 - pênduo (base 3): ª Lei de Newton (base 3): i F m a m4g cosψ T m 4 g sin ψ + m a cosψ ψ a sinψ + 3 i 4 3 P 4 ψ Resovendo o sistema de equações: ª - Equação de movimento do pênduo: m ( 4 ψ + m4 a + g) sinψ (eq. diferencia não inear) Soução numérica 7
28 Dinâmica do Mecanismo Do corpo 4 - pênduo (base 3): ª Lei de Newton (base 3): Re-arranjando r θ cos( θ + ) + ψ + + g cos sinψ r sinθ arcsin θ θ r cos cos 8
29 Dinâmica do Mecanismo Do corpo 4 - pênduo (base 3): ª Lei de Newton (base 3): ª - Equação da força T em função da posição anguar ψ: [ ( g a )cos ψ + ψ ] T m 4 cos ψ Ou seja, para cacuar T precisa-se resover (numericamente) a equação diferencia não inear para ψ. 9
30 Do corpo 3 massa concentrada na extremidade do braço (base nercia): Forças atuantes 3 3 g m P N N Dinâmica Dinâmica do Mecanismo do Mecanismo 3 3 ψ ψ ψ cos. 3 3 sin T T T T T T T T N N ) ( y x F F F Reação Ação
31 ª Lei de Newton (base nercia): + ψ ψ + + cos y x i a m F F T sin T N m g a m F Dinâmica Dinâmica do Mecanismo do Mecanismo 3 i São três incógnitas (N, F 3x, F 3y ) para duas equações. Utiizar-se-á o corpo para competá-as.
32 Dinâmica do Mecanismo Do corpo braço (base nercia): Forças atuantes P mg F ( F ) F x y F3 F ( F ) 3 x 3 y Reação Ação 3
33 Do corpo braço (base nercia): ª Lei de Newton (base nercia): * y x y x y x i a a m F F F F m g a m F Dinâmica Dinâmica do Mecanismo do Mecanismo 33 i * a a aceeração do centro de massa do braço, cacuada como sendo: ω + ω ω + * * * y x a a a a / cos / * sin o que aumenta mais duas eq. de equiíbrio dinâmico
34 Do corpo braço (base nercia): Como o comportamento do corpo é de corpo rígido, acrescenta-se as equações de rotação. Utiizando Euer com o somatório de forças em reação ao ponto : Dinâmica Dinâmica do Mecanismo do Mecanismo 34 * P ) F (- a ). ( ). ( a H ) H ( M cm n i cm m r dt d m r dt d i H quantidade de movimento anguar
35 Dinâmica do Mecanismo Do corpo braço (base nercia): Cacuando em reação ao centro de massa e usando o Teorema dos Eixos paraeos para transadar as inércias do centro de massa para o ponto, obtém-se: O xx yy zz Somando-se as duas equações de equiíbrio dinâmico do corpo às 3 do corpo 3, tem-se 5 equações que permitem cacuar: N, F3 x, F3 y, F x, F y 35

36 Do corpo disco (base nercia): Forças e momentos atuantes P m g F y x F F Dinâmica Dinâmica do Mecanismo do Mecanismo 36 y F F y x F F M M
37 ª Lei de Newton (base nercia): + + a F 3 * m F F F F m g m y x y x i i Dinâmica Dinâmica do Mecanismo do Mecanismo 37 Como o comportamento do corpo é de corpo rígido, acrescenta-se as equações de rotação. { M F r a ). ( ). ( M O cg O O O n i O m r dt d i + + θ θ + θ 3 Utiizando Euer com o somatório de momentos em reação ao ponto O:
38 Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações 38/67


39 Sist. Muti-corpos no Espaço GROSCÓPO Apicação dos Ânguos de Euer na modeagem do movimento: Equações de Movimento Reações Dinâmicas (O momento da força peso e anuado devido aos momentos de reação apicados peos mancais sobre o rotor) 39
40 Método de Newton-Euer Giroscópio Definição de sistemas de referência inercia e móveis Ψ Precessão Θ Nutação Φ Spin 4
41 Método de Newton-Euer Giroscópio Sistema inercia - base X, Y, Z no corpo Sistema móve - base X, Y, Z no corpo Sistema móve - base X, Y, Z no corpo Corpo V, rotor do giroscópio Ω Corpos 4
42 Método de Newton-Euer Giroscópio Rotação e Matrizes de transformação de coordenadas Precessão Nutação Spin 4
43 Método de Newton-Euer Giroscópio Veocidade anguar absouta dos sistemas móveis de referência; 43
44 Método de Newton-Euer Giroscópio Veocidade anguar absouta dos corpos,, V Giroscópio 44
45 Método de Newton-Euer Giroscópio Aceeraç ão anguar absouta dos corpos,, V 45
46 Método de Newton-Euer Giroscópio Veocidade inear absouta do centro de massa dos corpos,, V Aceeração inear absouta do centro de massa dos corpos,, V 46


47 Método de Newton-Euer Reações Dinâmicas Diagrama de corpo ivre 47


48 Método de Newton-Euer Reações Dinâmicas Equiíbrio Dinâmico 48
49 Método de Newton-Euer Momentos gerados peas forças Reativas 49
50 Método de Newton-Euer Equiíbrio de Euer 5

51 Método de Newton-Euer Reações Dinâmicas Equiíbrio Dinâmico 5
52 Método de Newton-Euer Reações Dinâmicas Equiíbrio Dinâmico 5
53 Método de Newton-Euer Reações Dinâmicas Momentos gerados peas forças Reativas 53
54 Método de Newton-Euer Reações Dinâmicas Momentos gerados peas forças Reativas 54
55 Método de Newton-Euer Equiíbrio de Euer 55
56 Método de Newton-Euer Equiíbrio de Euer 56

57 Método de Newton-Euer Reações Dinâmicas Equiíbrio Dinâmico 57
58 Método de Newton-Euer Reações Dinâmicas Momentos gerados peas forças Reativas 58
59 Método de Newton-Euer Equiíbrio de Euer 59
60 Método de Newton-Euer Reações Dinâmicas 6
61 Método de Newton-Euer Resovendo o sistema de equações Agrupando todas as equações, chega-se a um sistema de 8 equações. Têm-se 5 incógnitas, que são as forças dinâmicas de reação nos pontos A,, C, D e E; As três equações restantes são as equações diferenciais para os ânguos de precessão, nutação e spin; 6
62 Método de Newton-Euer Equações de Movimento 6
63 Método de Newton-Euer Equações dos Ânguos 63
64 Método de Newton-Euer Equações dos Ânguos 64
65 Método de Newton-Euer Simuações Experimenta Spin Experimenta Spin Simuação Experimenta Spin Experimenta Spin Simuação 65
66 Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações 66/67
67 Princípio de Jourdain Equações de Movimento sem o Cácuo das Reações Dinâmicas Princípio do trabaho Virtua D`Aembert As forças e momentos apicados sobre um corpo rígido podem ser divididos em : Passivos Ativos 67
68 Princípio de Jourdain Forças e Momentos Passivas São aqueas que não reaizam trabaho, como é o caso das forças e momentos de reação R e MR; Ativas São aqueas que reaizam trabaho FE e ME; 68
69 Princípio de Jourdain Forças e Momentos Num pano onde um corpo é obrigado a reaizar determinada trajetória, a reação norma do pano sobre o corpo estará sempre perpendicuar à sua trajetória. Por isso a força norma não reaiza trabaho e é chamada e força perdida ou passiva ; 69
70 Princípio de Jourdain Forças e Momentos Reescrevendo a equação de Newton- Euer 7
71 Princípio de Jourdain Forças e Momentos De outra forma temos 7
72 Princípio de Jourdain Forças e Momentos Mutipicando agora peos vetores de desocamento Ι s e ξvirtua que estão na direção do movimento, e conseqüentemente são perpendicuares às forças e momentos de reação; 7
73 Princípio de Jourdain Forças e Momentos Somando-se o trabaho virtua reaizado peas forças e momentos de reação temos: 73
74 Princípio de Jourdain Forças e Momentos Fazendo o uso agora dos vetores de veocidade virtua, ξ Ι s e tem-se o princípio da potência formuado por Jourdain; 74
75 Princípio de Jourdain Forças e Momentos Sabe-se que os vetores ξ Ι s e devem respeitar as condições de víncuo, ou seja, estes vetores só variam nas direções em que se têm graus de iberdade; 75
76 Princípio de Jourdain Forças e Momentos Defini-se então o vetor q, composto peas coordenadas dos graus de iberdade do sistema mecânico; Mas os movimentos de um corpo rígido ivre (sem víncuos) no espaço são descritos por 6 coordenas: 3 de transação de 3 de rotação; 76
77 Princípio de Jourdain Forças e Momentos Logo: { q q q q q q } T q ou q { q q q q q q } T
78 Princípio de Jourdain Forças e Momentos Sabe-se que esses vetores de veocidade só variam nas direções dos graus de iberdade do corpo. Logo, os mesmos podes ser obtidos quando as derivadas dos mesmos em reação aos graus de iberdade do sistema são cacuadas. Essa ferramenta é denominada de Jacobiano; 78
79 Princípio de Jourdain Forças e Momentos Jacobiano de Transação 79
80 Princípio de Jourdain Forças e Momentos Jacobiano de Rotação 8
81 Princípio de Jourdain Forças e Momentos Substituindo esse Jacobianos na equação do princípio da potência temos a formuação de Jourdain; 8
82 Usando o Método de Jourdain Sistemas de Corpos Rígidos - Giroscópio O objetivo deste exempo é iustrar a apicação do princípio de Jourdain para a obtenção das equações diferenciais de movimento do Giroscópio sem que seja necessário a representação e cácuo das forças de reação entre os vário corpos; 8


83 Usando o Método de Jourdain Giroscópio 3 equações responsáveis por descrever o comportament o dos ânguos de precessão, nutação e spin; 83
84 Usando o Método de Jourdain Giroscópio Veocidade anguar absouta dos sistemas e 84
85 Usando o Método de Jourdain Giroscópio Veocidade anguar absouta dos corpos,, V Jacobiano 85
86 Usando o Método de Jourdain Giroscópio Aceeração anguar absouta dos corpos,, V 86
87 Usando o Método de Jourdain Giroscópio Veocidade Linear absouta dos corpos,, V Aceeração Linear absouta dos corpos,, V 87
88 Usando o Método de Jourdain Giroscópio Vetor q formado peas coordenadas mínimas de veocidade dos corpos; 88
89 Usando o Método de Jourdain Giroscópio Jacobiano de Transação do corpo ; 89
90 Usando o Método de Jourdain Giroscópio Jacobiano de Transação do corpo ; 9
91 Usando o Método de Jourdain Giroscópio Jacobiano de Transação do corpo V; 9
92 Usando o Método de Jourdain Giroscópio Jacobiano de Rotação do corpo ; ω 9
93 Usando o Método de Jourdain Giroscópio Jacobiano de Rotação do corpo ; 93
94 Usando o Método de Jourdain Giroscópio Jacobiano de Rotação do corpo V; 94
95 Usando o Método de Jourdain Giroscópio As únicas forças externas apicadas sobre os corpos,, V são as forças peso; 95
96 Usando o Método de Jourdain Giroscópio Com o auxíio do tensor de inércia dos corpos, e V, substituindo os termos na equação; 96
97 Usando o Método de Jourdain Giroscópio Temos então: 97
98 Usando o Método de Jourdain Giroscópio Substituindo os Jacobianos nas equações anteriores e resovendo os respectivos produtos escaares e vetoriais chega-se então às 3 equações diferenciais de movimento; 98
99 Usando o Método de Jourdain Giroscópio soando-se as aceerações, tem-se: 99
100 Usando o Método de Jourdain Giroscópio E também:
101 Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jordain Apicações /67
102 Apicações em Satéites Satéite Nesse item, o método Newton-Euer-Jourdain é apicado a um sistema mecânico de corpos rígidos, distante da grande maioria de nos estudantes; O sistema em questão é composto por um corpo principa e 3 rotores internos dispostos ortogonamente entre si.


103 Apicações em Satéites Satéite O modeo mecânico para o satéite é apresentado a seguir. É caramente visíve os 4 corpos que o compõem; 3
104 Apicações em Satéites Satéite O satéite, que representa um sistema de mútipos corpos sem equações de víncuo, apresenta 6 graus de iberdade, sendo 3 desocamentos ineares, que definem sua órbita em torno da terra, e 3 rotações em torno de seu centro de massa, que definem sua atitude; 4


105 Apicações em Satéites Satéite Os ânguos que definem a atitude do satéite são apresentados na figura, juntamente com os sistemas de referência; φ φ φ3 5
106 Apicações em Satéites Órbitas Órbitas descritas por vetores ortogonais ao centro de cada face do satéite. Estas trajetórias são resutados das simuações em que apenas um rotor interno na direção X3 esta em funcionamento; ϕ R 3 [ rad] e ϕ R3 35 [ rad / s] 6
107 Apicações em Satéites Órbitas Perturbação: ϕ ϕ ϕ ϕ 3 ϕ ϕ [ rad / s] [ rad / s] [ rad ],[ rad / s] 3 7
108 Apicações em Satéites Órbitas Perturbação: ϕ ϕ ϕ ϕ 3 ϕ ϕ [ rad / s] [ rad ],[ rad / s] [ rad / s] 3 8
109 Apicações em Satéites Órbitas Perturbação ϕ ϕ ϕ ϕ 3 ϕ ϕ [ rad / s] [ rad ] [ rad / s],[ rad / s] 3 9
110 Apicações em Satéites Simuações Experimenta Simuação Experimenta Simuação
11 Cinemática de partículas 605
 SUMÁRIO 11 Cinemática de partículas 605 11.1 Introdução à dinâmica 606 Movimento retilíneo de partículas 607 11.2 Posição, velocidade e aceleração 607 11.3 Determinação do movimento de uma partícula 611
SUMÁRIO 11 Cinemática de partículas 605 11.1 Introdução à dinâmica 606 Movimento retilíneo de partículas 607 11.2 Posição, velocidade e aceleração 607 11.3 Determinação do movimento de uma partícula 611
Profº Carlos Alberto
 Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
Emerson Marcos Furtado
 Emerson Marcos Furtado Mestre em Métodos Numéricos pea Universidade Federa do Paraná (UFPR). Graduado em Matemática pea UFPR. Professor do Ensino Médio nos estados do Paraná e Santa Catarina desde 199.
Emerson Marcos Furtado Mestre em Métodos Numéricos pea Universidade Federa do Paraná (UFPR). Graduado em Matemática pea UFPR. Professor do Ensino Médio nos estados do Paraná e Santa Catarina desde 199.
Pontifícia Universidade Católica do Rio de Janeiro / PUC-Rio Departamento de Engenharia Mecânica. ENG1705 Dinâmica de Corpos Rígidos.
 Pontifícia Universidade Católica do Rio de Janeiro / PUC-Rio Departamento de Engenharia Mecânica ENG1705 Dinâmica de Corpos Rígidos (Período: 2016.1) Notas de Aula Capítulo 1: VETORES Ivan Menezes ivan@puc-rio.br
Pontifícia Universidade Católica do Rio de Janeiro / PUC-Rio Departamento de Engenharia Mecânica ENG1705 Dinâmica de Corpos Rígidos (Período: 2016.1) Notas de Aula Capítulo 1: VETORES Ivan Menezes ivan@puc-rio.br
ADL A Representação Geral no Espaço de Estados
 ADL14 3.3 A Representação Geral no Espaço de Estados definições Combinação linear: Uma combinação linear de n variáveis, x i, para r = 1 a n, é dada pela seguinte soma: (3.17) onde cada K i é uma constante.
ADL14 3.3 A Representação Geral no Espaço de Estados definições Combinação linear: Uma combinação linear de n variáveis, x i, para r = 1 a n, é dada pela seguinte soma: (3.17) onde cada K i é uma constante.
CAPÍTULO 3 DINÂMICA DA PARTÍCULA: TRABALHO E ENERGIA
 CAPÍLO 3 DINÂMICA DA PARÍCLA: RABALHO E ENERGIA Neste capítulo será analisada a lei de Newton numa de suas formas integrais, aplicada ao movimento de partículas. Define-se o conceito de trabalho e energia
CAPÍLO 3 DINÂMICA DA PARÍCLA: RABALHO E ENERGIA Neste capítulo será analisada a lei de Newton numa de suas formas integrais, aplicada ao movimento de partículas. Define-se o conceito de trabalho e energia
Mecânica e Ondas FÍSICA. Semana 6 - Aula 6 Rotação. Rolamento (Forças com Rotação); Energia Cinética de Rotação
; Energia Cinética de Rotação") Mecânica e Ondas LERC Tagus ºSem 009/0 Prof. J. C. Fernandes http://mo-lerc-tagus.ist.utl.pt/ Mecânica e Ondas Semana 6 - Aula 6 Rotação Rolamento (Forças com Rotação); Energia Cinética de Rotação FÍSICA
Mecânica e Ondas LERC Tagus ºSem 009/0 Prof. J. C. Fernandes http://mo-lerc-tagus.ist.utl.pt/ Mecânica e Ondas Semana 6 - Aula 6 Rotação Rolamento (Forças com Rotação); Energia Cinética de Rotação FÍSICA
Considerando a variação temporal do momento angular de um corpo rígido que gira ao redor de um eixo fixo, temos:
 Segunda Lei de Newton para Rotações Considerando a variação temporal do momento angular de um corpo rígido que gira ao redor de um eixo fixo, temos: L t = I ω t e como L/ t = τ EXT e ω/ t = α, em que α
Segunda Lei de Newton para Rotações Considerando a variação temporal do momento angular de um corpo rígido que gira ao redor de um eixo fixo, temos: L t = I ω t e como L/ t = τ EXT e ω/ t = α, em que α
Sistemas Dinâmicos e Caos Lista de Problemas 2.1 Prof. Marco Polo
 Sistemas Dinâmicos e Caos - 2016.2 - Lista de Problemas 2.1 1 Sistemas Dinâmicos e Caos Lista de Problemas 2.1 Prof. Marco Polo Questão 01: Oscilador harmônico Considere o oscilador harmônico ẋ = y, ẏ
Sistemas Dinâmicos e Caos - 2016.2 - Lista de Problemas 2.1 1 Sistemas Dinâmicos e Caos Lista de Problemas 2.1 Prof. Marco Polo Questão 01: Oscilador harmônico Considere o oscilador harmônico ẋ = y, ẏ
Universidade Federal Rural do Semi Árido UFERSA Pro Reitoria de Graduação PROGRAD Disciplina: Física II Professora: Subênia Medeiros
 Universidade Federal Rural do Semi Árido UFERSA Pro Reitoria de Graduação PROGRAD Disciplina: Física II Professora: Subênia Medeiros Movimento Periódico O movimento é um dos fenômenos mais fundamentais
Universidade Federal Rural do Semi Árido UFERSA Pro Reitoria de Graduação PROGRAD Disciplina: Física II Professora: Subênia Medeiros Movimento Periódico O movimento é um dos fenômenos mais fundamentais
8. Estabilidade e bifurcação
 8. Estabilidade e bifurcação Os sistemas dinâmicos podem apresentar pontos fixos, isto é, pontos no espaço de fase onde o sistema permanece sempre no mesmo estado. Para identificar os pontos fixos e estudar
8. Estabilidade e bifurcação Os sistemas dinâmicos podem apresentar pontos fixos, isto é, pontos no espaço de fase onde o sistema permanece sempre no mesmo estado. Para identificar os pontos fixos e estudar
NOTAS DE AULA INTRODUÇÃO À ENGENHARIA BIOMÉDICA 70
 NOTAS DE AULA INTRODUÇÃO À ENGENHARIA BIOMÉDICA 70 4.2 CINETICA DO CORPO HUMANO a. Sistemas de massa A seção anterior considerou cinemática de corpo humano e definiu as equações pertinentes. Recorde que
NOTAS DE AULA INTRODUÇÃO À ENGENHARIA BIOMÉDICA 70 4.2 CINETICA DO CORPO HUMANO a. Sistemas de massa A seção anterior considerou cinemática de corpo humano e definiu as equações pertinentes. Recorde que
Mecânica Un.2. Momento em relação a um Ponto. Créditos: Professor Leandro
 Mecânica Un.2 Momento em relação a um Ponto Créditos: Professor Leandro Equilíbrio Equilíbrio Para que uma partícula esteja em equilíbrio, basta que a o resultante das forças aplicadas seja igual a zero.
Mecânica Un.2 Momento em relação a um Ponto Créditos: Professor Leandro Equilíbrio Equilíbrio Para que uma partícula esteja em equilíbrio, basta que a o resultante das forças aplicadas seja igual a zero.
REVISÃO 1º ANO PP 2 ETP. Prof. Eng. João Lucas Torres
 REVISÃO 1º ANO PP 2 ETP Prof. Eng. João Lucas Torres Sobral, 2016 TRANSMISSÃO DO MOVIMENTO REVISÃO DE CONTEÚDO Lembre que no movimento circular existem DUAS velocidades. 1º) Velocidade linear: rapidez
REVISÃO 1º ANO PP 2 ETP Prof. Eng. João Lucas Torres Sobral, 2016 TRANSMISSÃO DO MOVIMENTO REVISÃO DE CONTEÚDO Lembre que no movimento circular existem DUAS velocidades. 1º) Velocidade linear: rapidez
Plantas e mapas. Na Aula 17, aprendemos o conceito de semelhança
 A UA UL LA Pantas e mapas Introdução Na Aua 7, aprendemos o conceito de semehança de triânguos e vimos, na Aua 0, interessantes apicações desse conceito no cácuo de distâncias difíceis de serem medidas
A UA UL LA Pantas e mapas Introdução Na Aua 7, aprendemos o conceito de semehança de triânguos e vimos, na Aua 0, interessantes apicações desse conceito no cácuo de distâncias difíceis de serem medidas
NÚMEROS COMPLEXOS
 NÚMEROS COMPLEXOS - 016 1. (EFOMM 016) O número complexo, z z (cos θ i sen θ), sendo i a unidade imaginária e 0 θ π, que satisfaz a inequação z i e que possui o menor argumento θ, é a) b) c) d) 5 5 z i
NÚMEROS COMPLEXOS - 016 1. (EFOMM 016) O número complexo, z z (cos θ i sen θ), sendo i a unidade imaginária e 0 θ π, que satisfaz a inequação z i e que possui o menor argumento θ, é a) b) c) d) 5 5 z i
Métodos Numéricos e Estatísticos Parte I-Métodos Numéricos
 Métodos Numéricos e Estatísticos Parte I-Métodos Numéricos Lic Eng Biomédica e Bioengenharia-2009/2010 O problema geral da interpolação polinomial consiste em, dados n + 1 pontos (reais ou complexos) x
Métodos Numéricos e Estatísticos Parte I-Métodos Numéricos Lic Eng Biomédica e Bioengenharia-2009/2010 O problema geral da interpolação polinomial consiste em, dados n + 1 pontos (reais ou complexos) x
Parênteses de Poisson e Teorema de Liouville. Marina E. Wosniack 23 de abril de 2012
 Parênteses de Poisson e Teorema de Liouville Marina E. Wosniack 23 de abril de 2012 Conteúdo Introdução; Parênteses de Poisson Parênteses de Poisson - Representação de Heisenberg Teorema de Liouville Teorema
Parênteses de Poisson e Teorema de Liouville Marina E. Wosniack 23 de abril de 2012 Conteúdo Introdução; Parênteses de Poisson Parênteses de Poisson - Representação de Heisenberg Teorema de Liouville Teorema
Física Fundamental I
 Física Fundamental I Código: Carga Horária: 60h Ementa Movimento de uma dimensão, movimento em um plano, dinâmica da partícula, dinâmica da partícula II, trabalho e energia, conservação de energia, momento
Física Fundamental I Código: Carga Horária: 60h Ementa Movimento de uma dimensão, movimento em um plano, dinâmica da partícula, dinâmica da partícula II, trabalho e energia, conservação de energia, momento
Eletromagnetismo I. Prof. Daniel Orquiza. Eletromagnetismo I. Prof. Daniel Orquiza de Carvalho
 de Carvalho - Eletrostática Densidade de Fluxo Elétrico e Lei de Gauss (Páginas 48 a 55 no livro texto) Experimento com esferas concêntricas Densidade de Fluxo elétrico (D) Relação entre D e E no vácuo
de Carvalho - Eletrostática Densidade de Fluxo Elétrico e Lei de Gauss (Páginas 48 a 55 no livro texto) Experimento com esferas concêntricas Densidade de Fluxo elétrico (D) Relação entre D e E no vácuo
( ) ( ) ( ) ( ) ( ) (19) O ELITE RESOLVE IME 2012 MATEMÁTICA DISCURSIVAS MATEMÁTICA
 ( ) ( ) ( ) ( ) (19) O ELITE RESOLVE IME 2012 MATEMÁTICA DISCURSIVAS MATEMÁTICA") (9) 5-0 O EITE ESOVE IME 0 MTEMÁTIC DISCUSIVS MTEMÁTIC QUESTÃO 0 O segundo, o sétimo e o vigésimo sétimo termos de uma rogressão ritmética () de números inteiros, de razão r, formam, nesta ordem, uma rogressão
(9) 5-0 O EITE ESOVE IME 0 MTEMÁTIC DISCUSIVS MTEMÁTIC QUESTÃO 0 O segundo, o sétimo e o vigésimo sétimo termos de uma rogressão ritmética () de números inteiros, de razão r, formam, nesta ordem, uma rogressão
Métodos Matemáticos para Engenharia
 Métodos Matemáticos para Engenharia Transformada de Laplace Docentes: > Prof. Fabiano Araujo Soares, Dr. Introdução Muitos parâmetros em nosso universo interagem através de equações diferenciais; Por exemplo,
Métodos Matemáticos para Engenharia Transformada de Laplace Docentes: > Prof. Fabiano Araujo Soares, Dr. Introdução Muitos parâmetros em nosso universo interagem através de equações diferenciais; Por exemplo,
3 Métodos Numéricos Análise das Equações de Movimento
 3 Métodos Numéricos A dinâmica de sistemas mecânicos normalmente é modelada como um sistema de equações diferenciais. Estas equações diferenciais devem ser resolvidas a fim de relacionar as variáveis entre
3 Métodos Numéricos A dinâmica de sistemas mecânicos normalmente é modelada como um sistema de equações diferenciais. Estas equações diferenciais devem ser resolvidas a fim de relacionar as variáveis entre
SUMÁRIO. 1 Introdução Vetores: Força e Posição Engenharia e Estática...1
 SUMÁRIO 1 Introdução... 1 1.1 Engenharia e Estática...1 1.2 Uma Breve História da Estática...3 Galileu Galilei (1564-1642)... 4 Isaac Newton (1643-1727)... 4 1.3 Princípios Fundamentais...5 Leis do movimento
SUMÁRIO 1 Introdução... 1 1.1 Engenharia e Estática...1 1.2 Uma Breve História da Estática...3 Galileu Galilei (1564-1642)... 4 Isaac Newton (1643-1727)... 4 1.3 Princípios Fundamentais...5 Leis do movimento
MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA
 MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA 1.0 Definições Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É conveniente representar a posição da partícula com suas
MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA 1.0 Definições Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É conveniente representar a posição da partícula com suas
f, da, onde R é uma das regiões mostradas na
 Integrais Duplas em Coordenadas Polares Bibliografia básica: THOMAS, G. B. Cálculo. Vol. Capítulo 1. Item 1.3. STEWAT, J. Cálculo. Vol.. Capítulo 15. Item 15.4. Sabemos que o cálculo da área de uma região
Integrais Duplas em Coordenadas Polares Bibliografia básica: THOMAS, G. B. Cálculo. Vol. Capítulo 1. Item 1.3. STEWAT, J. Cálculo. Vol.. Capítulo 15. Item 15.4. Sabemos que o cálculo da área de uma região
MOVIMENTO OSCILATÓRIO
 MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
LISTA 05. Rotação de corpos rígidos e momento angular
 UNIVERSIDADE DE SÃO PAULO INSTITUTO DE FÍSICA Física I LISTA 05 Rotação de corpos rígidos e oento anguar 1. A héice de u avião gira a 1900 rev/in. (a) Cacue a veocidade anguar da héice e rad/s. (R: 199
UNIVERSIDADE DE SÃO PAULO INSTITUTO DE FÍSICA Física I LISTA 05 Rotação de corpos rígidos e oento anguar 1. A héice de u avião gira a 1900 rev/in. (a) Cacue a veocidade anguar da héice e rad/s. (R: 199
Física II Ondas, Fluidos e Termodinâmica USP Prof. Antônio Roque Aula
 Aula 3 010 Movimento Harmônico Simples: Exemplos O protótipo físico do movimento harmônico simples (MHS) visto nas aulas passadas um corpo de massa m preso a uma mola executando vibrações de pequenas amplitudes
Aula 3 010 Movimento Harmônico Simples: Exemplos O protótipo físico do movimento harmônico simples (MHS) visto nas aulas passadas um corpo de massa m preso a uma mola executando vibrações de pequenas amplitudes
Halliday Fundamentos de Física Volume 1
 Halliday Fundamentos de Física Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica, LTC, Forense,
Halliday Fundamentos de Física Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica, LTC, Forense,
MOMENTO DE INÉRCIA DE UM CORPO RÍGIDO
 Departamento de Física da Faculdade de Ciências da Universidade de Lisboa T4 FÍSICA EXPERIMENTAL I - 007/08 MOMENTO DE INÉRCIA DE UM CORPO RÍGIDO 1. Objectivo Estudo do movimento de rotação de um corpo
Departamento de Física da Faculdade de Ciências da Universidade de Lisboa T4 FÍSICA EXPERIMENTAL I - 007/08 MOMENTO DE INÉRCIA DE UM CORPO RÍGIDO 1. Objectivo Estudo do movimento de rotação de um corpo
CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG
 Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
MODELAÇÃO DA PROPAGAÇÃO DE ONDAS SÍSMICAS ATRAVÉS DO MÉTODO DOS ELEMENTOS DE FRONTEIRA
 MODELAÇÃO DA PROPAGAÇÃO DE ONDAS SÍSMICAS ATRAVÉS DO MÉTODO DOS ELEMENTOS DE FRONTEIRA P. F. A. SANTOS Assistente DEC-FCTUC Coimbra A. J. B. TADEU Prof. Associado DEC-FCTUC Coimbra SUMÁRIO Neste trabaho
MODELAÇÃO DA PROPAGAÇÃO DE ONDAS SÍSMICAS ATRAVÉS DO MÉTODO DOS ELEMENTOS DE FRONTEIRA P. F. A. SANTOS Assistente DEC-FCTUC Coimbra A. J. B. TADEU Prof. Associado DEC-FCTUC Coimbra SUMÁRIO Neste trabaho
QUESTÕES CORRIGIDAS PROFESSOR Rodrigo Penna QUESTÕES CORRIGIDAS ESTACIONÁRIAS E MHS ÍNDICE. Ondas Estacionárias
 QUESTÕES CORRIGIDAS ESTACIONÁRIAS E MHS 1 ÍNDICE ONDAS ESTACIONÁRIAS 1 MHS 11 Ondas Estacionárias 1. (UNIFEI 1ª 2006) Seja T = 4,0 s o período de uma onda transversa senoida propagando-se da esquerda para
QUESTÕES CORRIGIDAS ESTACIONÁRIAS E MHS 1 ÍNDICE ONDAS ESTACIONÁRIAS 1 MHS 11 Ondas Estacionárias 1. (UNIFEI 1ª 2006) Seja T = 4,0 s o período de uma onda transversa senoida propagando-se da esquerda para
Física. Física Módulo 1 Velocidade Relativa, Movimento de Projéteis, Movimento Circular
 Física Módulo 1 Velocidade Relativa, Movimento de Projéteis, Movimento Circular Velocidade Relativa Um Gedankenexperiment Imagine-se agora em um avião, a 350 km/h. O destino (a direção) é por conta de
Física Módulo 1 Velocidade Relativa, Movimento de Projéteis, Movimento Circular Velocidade Relativa Um Gedankenexperiment Imagine-se agora em um avião, a 350 km/h. O destino (a direção) é por conta de
Mecânica Técnica. Aula 2 Lei dos Senos e Lei dos Cossenos. Prof. MSc. Luiz Eduardo Miranda J. Rodrigues
 Aula 2 Lei dos Senos e Lei dos Cossenos Tópicos Abordados Nesta Aula Cálculo de Força Resultante. Operações Vetoriais. Lei dos Senos. Lei dos Cossenos. Grandezas Escalares Uma grandeza escalar é caracterizada
Aula 2 Lei dos Senos e Lei dos Cossenos Tópicos Abordados Nesta Aula Cálculo de Força Resultante. Operações Vetoriais. Lei dos Senos. Lei dos Cossenos. Grandezas Escalares Uma grandeza escalar é caracterizada
ROTEIRO: 1. Cap. 2 Plano Cartesiano; 2. Vetores.
 ROTEIRO: 1. Cap. 2 Plano Cartesiano; 2. Vetores. Capítulo 2 Plano Cartesiano / Vetores: Plano Cartesiano Foi criado pelo matemático René Descartes, associando a geometria à álgebra. Desse modo, ele pôde
ROTEIRO: 1. Cap. 2 Plano Cartesiano; 2. Vetores. Capítulo 2 Plano Cartesiano / Vetores: Plano Cartesiano Foi criado pelo matemático René Descartes, associando a geometria à álgebra. Desse modo, ele pôde
Cap. 7 - Momento Linear e Impulso
 Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 7 - Momento Linear e Impulso Prof. Elvis Soares Consideremos o seguinte problema: ao atirar um projétil de um canhão
Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 7 - Momento Linear e Impulso Prof. Elvis Soares Consideremos o seguinte problema: ao atirar um projétil de um canhão
Comecemos escrevendo a forma geral de uma equação diferencial de ordem n, 1 inear e invariante no tempo, , b i
 3 6 ADL aula 2 Função de Transferência Comecemos escrevendo a forma geral de uma equação diferencial de ordem n, 1 inear e invariante no tempo, onde c(t) é a saída, r(t) é a entrada e os a i, b i e a forma
3 6 ADL aula 2 Função de Transferência Comecemos escrevendo a forma geral de uma equação diferencial de ordem n, 1 inear e invariante no tempo, onde c(t) é a saída, r(t) é a entrada e os a i, b i e a forma
Geometria Analítica II - Aula
 Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
PARTE I EQUAÇÕES DE UMA VARIÁVEL REAL
 PARTE I EQUAÇÕES DE UMA VARIÁVEL REAL. Introdução Considere f uma função, não constante, de uma variável real ou complexa, a equação f(x) = 0 será denominada equação de uma incógnita. EXEMPLO e x + senx
PARTE I EQUAÇÕES DE UMA VARIÁVEL REAL. Introdução Considere f uma função, não constante, de uma variável real ou complexa, a equação f(x) = 0 será denominada equação de uma incógnita. EXEMPLO e x + senx
ENERGIA HIDRÁULICA MÁQUINA DE FLUXO ENERGIA MECÂNICA
 ª EXPERIÊNCIA - ESTUDO DAS BOMBAS APLICAÇÃO DA ANÁLISE DIMENSIONAL E DA TEORIA DA SEMELHANÇA 1 INTRODUÇÃO AO ESTUDO DAS MÁQUINAS DE FLUXO ( BOMBAS, TURBINAS, COMPRESSORES, VENTILADORES) As máquinas que
ª EXPERIÊNCIA - ESTUDO DAS BOMBAS APLICAÇÃO DA ANÁLISE DIMENSIONAL E DA TEORIA DA SEMELHANÇA 1 INTRODUÇÃO AO ESTUDO DAS MÁQUINAS DE FLUXO ( BOMBAS, TURBINAS, COMPRESSORES, VENTILADORES) As máquinas que
MODELO MATEMÁTICO DETERMINÍSTICO PARA A PREVISÃO DA TRANSIÇÃO COLUNAR-EQUIAXIAL NA SOLIDIFICAÇÃO BIDIMENSIONAL 1
 MODELO MATEMÁTICO DETERMINÍSTICO PARA A PREVISÃO DA TRANSIÇÃO COLUNAR-EQUIAXIAL NA SOLIDIFICAÇÃO BIDIMENSIONAL 1 Marceo Aquino Martorano 2 Resumo O objetivo do presente trabaho é propor um modeo matemático
MODELO MATEMÁTICO DETERMINÍSTICO PARA A PREVISÃO DA TRANSIÇÃO COLUNAR-EQUIAXIAL NA SOLIDIFICAÇÃO BIDIMENSIONAL 1 Marceo Aquino Martorano 2 Resumo O objetivo do presente trabaho é propor um modeo matemático
CIRCUITOS MAGNÉTICOS COM ÍMÃS PERMANENTES
 APOTILA E ELETROMAGNETIMO I 146 16 CIRCUITO MAGNÉTICO COM ÍMÃ PERMANENTE Iniciamente vamos considerar um materia ferromanético iustrado na fiura 16.1, enroado com N espiras condutoras em que circua uma
APOTILA E ELETROMAGNETIMO I 146 16 CIRCUITO MAGNÉTICO COM ÍMÃ PERMANENTE Iniciamente vamos considerar um materia ferromanético iustrado na fiura 16.1, enroado com N espiras condutoras em que circua uma
Aplicação do Teorema de Pitágoras
 A UA U L L A Apicação do Teorema de Pitágoras Para pensar Uma escada de 5 m de comprimento está apoiada num muro. O pé da escada está afastado 3 m da base do muro. Qua é a atura, no muro, que a escada
A UA U L L A Apicação do Teorema de Pitágoras Para pensar Uma escada de 5 m de comprimento está apoiada num muro. O pé da escada está afastado 3 m da base do muro. Qua é a atura, no muro, que a escada
Notas em Álgebra Linear
 Notas em Álgebra Linear 1 Pedro Rafael Lopes Fernandes Definições básicas Uma equação linear, nas variáveis é uma equação que pode ser escrita na forma: onde e os coeficientes são números reais ou complexos,
Notas em Álgebra Linear 1 Pedro Rafael Lopes Fernandes Definições básicas Uma equação linear, nas variáveis é uma equação que pode ser escrita na forma: onde e os coeficientes são números reais ou complexos,
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO PROGRAMA DE DISCIPLINA
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO PROGRAMA DE DISCIPLINA NOME COLEGIADO CÓDIGO SEMESTRE FÍSICA I CEAGRO AGRO0006 016.1 CARGA HORÁRIA TEÓR: 60 PRÁT: 0 HORÁRIOS: a. FEIRA (10:00-1:00) TURMA A
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO PROGRAMA DE DISCIPLINA NOME COLEGIADO CÓDIGO SEMESTRE FÍSICA I CEAGRO AGRO0006 016.1 CARGA HORÁRIA TEÓR: 60 PRÁT: 0 HORÁRIOS: a. FEIRA (10:00-1:00) TURMA A
CIRCUITOS MAGNÉTICOS COM ÍMÃS PERMANENTES
 145 14 CIRCUITO MAGNÉTICO COM ÍMÃ PERMANENTE Considere o núceo de materia ferromanético mostrado na fiura 14.1, enroado com um enroamento de N espiras. Fazendo circuar por este enroamento uma corrente
145 14 CIRCUITO MAGNÉTICO COM ÍMÃ PERMANENTE Considere o núceo de materia ferromanético mostrado na fiura 14.1, enroado com um enroamento de N espiras. Fazendo circuar por este enroamento uma corrente
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Journal Club Efeito Hall Edwin Herbert Hall 1879 Awschalow et al. Sci. Amer. (2007) Journal
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela Journal Club Efeito Hall Edwin Herbert Hall 1879 Awschalow et al. Sci. Amer. (2007) Journal
Dinâmica do Movimento de Rotação
 www.engenhariafacil.net Resumo com exercícios resolvidos do assunto: Dinâmica do Movimento de Rotação (1)- TORQUE, CONSIDERAÇÕES INICIAIS: Já estudamos que a atuação de forças em um corpo altera o movimento
www.engenhariafacil.net Resumo com exercícios resolvidos do assunto: Dinâmica do Movimento de Rotação (1)- TORQUE, CONSIDERAÇÕES INICIAIS: Já estudamos que a atuação de forças em um corpo altera o movimento
Uma viga em balanço (figura abaixo), com comprimento 2c, engastada rigidamente na estrutura do túnel de vento é representada graficamente por:
, com comprimento 2c, engastada rigidamente na estrutura do túnel de vento é representada graficamente por:") 1 a Série de exercícios Aeroelasticidade Estática Prof. Gil 2º semestre 2009 1ª Questão: Estude o problema de um modelo de uma bomba cuja geometria é axissimétrica, a ser testado em túnel de vento. Os
1 a Série de exercícios Aeroelasticidade Estática Prof. Gil 2º semestre 2009 1ª Questão: Estude o problema de um modelo de uma bomba cuja geometria é axissimétrica, a ser testado em túnel de vento. Os
TRIGONOMETRIA. Aula 2. Trigonometria no Triângulo Retângulo Professor Luciano Nóbrega. 1º Bimestre. Maria Auxiliadora
 TRIGONOMETRIA Aua Trigonometria no Triânguo Retânguo Professor Luciano Nóbrega º Bimestre Maria Auxiiadora Eementos de um triânguo retânguo ß a cateto adjacente ao ânguo ß B c A Lembre-se: A soma das medidas
TRIGONOMETRIA Aua Trigonometria no Triânguo Retânguo Professor Luciano Nóbrega º Bimestre Maria Auxiiadora Eementos de um triânguo retânguo ß a cateto adjacente ao ânguo ß B c A Lembre-se: A soma das medidas
1. Sistemas Trifásicos
 Sistemas Elétricos de Potência 1. Sistemas Trifásicos Professor: Dr. Raphael Augusto de Souza Benedito E-mail:raphaelbenedito@utfpr.edu.br disponível em: http://paginapessoal.utfpr.edu.br/raphaelbenedito
Sistemas Elétricos de Potência 1. Sistemas Trifásicos Professor: Dr. Raphael Augusto de Souza Benedito E-mail:raphaelbenedito@utfpr.edu.br disponível em: http://paginapessoal.utfpr.edu.br/raphaelbenedito
Matriz de Avaliação de Matemática
 Matriz de Avaliação de Matemática A prova de matemática do TRLQ (Teste de Raciocínio Lógico Quantitativo) tem por objetivo avaliar o preparo das pessoas que a realizam para cursar programas de ensino que
Matriz de Avaliação de Matemática A prova de matemática do TRLQ (Teste de Raciocínio Lógico Quantitativo) tem por objetivo avaliar o preparo das pessoas que a realizam para cursar programas de ensino que
1. Entre as funções dadas abaixo, verifique quais são transformações lineares: x y z
 MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE FEDERAL DE VIÇOSA 657- - VIÇOSA - MG BRASIL a LISTA DE EXERCÍCIOS DE MAT 8 I SEMESTRE DE Entre as funções dadas abaixo, verifique quais são transformações
MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE FEDERAL DE VIÇOSA 657- - VIÇOSA - MG BRASIL a LISTA DE EXERCÍCIOS DE MAT 8 I SEMESTRE DE Entre as funções dadas abaixo, verifique quais são transformações
FORÇA TICA FORÇA A RESULTANTE
 ESTÁTIC TIC Estuda a causa dos movimentos, sem se preocupar com os movimentos. FORÇ gente capaz de produzir variações no estado de movimento de um corpo e ou produzir deformações neste corpo. É uma grandeza
ESTÁTIC TIC Estuda a causa dos movimentos, sem se preocupar com os movimentos. FORÇ gente capaz de produzir variações no estado de movimento de um corpo e ou produzir deformações neste corpo. É uma grandeza
Cursinho TRIU 22/04/2010. Física Mecânica Aula 1. Cinemática Escalar Exercícios Resolução
 Física Mecânica Aula 1 Cinemática Escalar Exercícios Resolução 1. O ônibus movimenta-se com velocidade constante, sem mudar sua trajetória. Então, tanto a lâmpada quanto o passageiro, que estão dentro
Física Mecânica Aula 1 Cinemática Escalar Exercícios Resolução 1. O ônibus movimenta-se com velocidade constante, sem mudar sua trajetória. Então, tanto a lâmpada quanto o passageiro, que estão dentro
Máquinas simples. Ao longo de sua história, o ser humano A U L A
 Máquinas simpes Ao ongo de sua história, o ser humano procurou mehorar suas condições de trabaho, principamente no que se refere à redução de seu esforço físico. ara isso, o homem utiizou, iniciamente,
Máquinas simpes Ao ongo de sua história, o ser humano procurou mehorar suas condições de trabaho, principamente no que se refere à redução de seu esforço físico. ara isso, o homem utiizou, iniciamente,
Introdução. Dinâmica é a parte da Mecânica que estuda os movimentos e as forças.
 Dinâmica Introdução Dinâmica é a parte da Mecânica que estuda os movimentos e as forças. Em geral percebemos as forças através de seus efeitos. Assim, podemos dizer que força é o agente físico capaz de
Dinâmica Introdução Dinâmica é a parte da Mecânica que estuda os movimentos e as forças. Em geral percebemos as forças através de seus efeitos. Assim, podemos dizer que força é o agente físico capaz de
3 Movimentos com vínculos
 3.1-1 3 Movimentos com vínculos Se obrigarmos um corpo de mover-se ao longo de uma trajetória (curva) fixa (por exemplo, ao longo de uma montanha-russa, ou preso à extremidade de uma haste fina que obriga
3.1-1 3 Movimentos com vínculos Se obrigarmos um corpo de mover-se ao longo de uma trajetória (curva) fixa (por exemplo, ao longo de uma montanha-russa, ou preso à extremidade de uma haste fina que obriga
MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA
 MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA 1 a LISTA DE EXERCÍCIOS DE MAT 17 1. Suponha que uma força de 1 newtons é aplicada em um objeto ao longo do
MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA 1 a LISTA DE EXERCÍCIOS DE MAT 17 1. Suponha que uma força de 1 newtons é aplicada em um objeto ao longo do
Transdutores capacitivos e indutivos. Prof. Valner Brusamarello
 Transdutores capacitivos e indutivos Prof. Vaner Brusamareo Transdutores apacitivos Fornecem uma ateração da capacitância em resposta ao estímuo Ateração da distância, área ou dieétrico das pacas apacitor
Transdutores capacitivos e indutivos Prof. Vaner Brusamareo Transdutores apacitivos Fornecem uma ateração da capacitância em resposta ao estímuo Ateração da distância, área ou dieétrico das pacas apacitor
Momentos de Inércia de Superfícies
 PUC Goiás Curso: Engenharia Civil Disciplina: Mecânica dos Sólidos Corpo Docente: Geisa Pires Turma:----------- Plano de Aula Data: ------/--------/---------- Leitura obrigatória Mecânica Vetorial para
PUC Goiás Curso: Engenharia Civil Disciplina: Mecânica dos Sólidos Corpo Docente: Geisa Pires Turma:----------- Plano de Aula Data: ------/--------/---------- Leitura obrigatória Mecânica Vetorial para
Conversão de Energia II
 Departamento de Engenharia Elétrica Aula 6.1 Máquinas Síncronas Prof. João Américo Vilela Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas: com Introdução à Eletrônica
Departamento de Engenharia Elétrica Aula 6.1 Máquinas Síncronas Prof. João Américo Vilela Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas: com Introdução à Eletrônica
sica- Matemática tica e a equação diferencial parcial que descreve o fluxo de calor
 A Equação de Calor Uma das EDP s clássica da FísicaF sica- Matemática tica e a equação diferencial parcial que descreve o fluxo de calor em um corpo sólido. s E uma aplicação mais recente é a que descreve
A Equação de Calor Uma das EDP s clássica da FísicaF sica- Matemática tica e a equação diferencial parcial que descreve o fluxo de calor em um corpo sólido. s E uma aplicação mais recente é a que descreve
Aula 3 VETORES. Introdução
 Aula 3 VETORES Introdução Na Física usamos dois grupos de grandezas: as grandezas escalares e as grandezas vetoriais. São escalares as grandezas que ficam caracterizadas com os seus valores numéricos e
Aula 3 VETORES Introdução Na Física usamos dois grupos de grandezas: as grandezas escalares e as grandezas vetoriais. São escalares as grandezas que ficam caracterizadas com os seus valores numéricos e
Resistência dos Materiais
 Aula 7 Estudo de Torção, Ângulo de Torção Ângulo de Torção O projeto de um eixo depende de limitações na quantidade de rotação ou torção ocorrida quando o eixo é submetido ao torque, desse modo, o ângulo
Aula 7 Estudo de Torção, Ângulo de Torção Ângulo de Torção O projeto de um eixo depende de limitações na quantidade de rotação ou torção ocorrida quando o eixo é submetido ao torque, desse modo, o ângulo
Noções Básicas de Física Arquitectura Paisagística LEI DE HOOKE (1)
") LEI DE HOOKE INTRODUÇÃO A Figura 1 mostra uma mola de comprimento l 0, suspensa por uma das suas extremidades. Quando penduramos na outra extremidade da mola um corpo de massa m, a mola passa a ter um
LEI DE HOOKE INTRODUÇÃO A Figura 1 mostra uma mola de comprimento l 0, suspensa por uma das suas extremidades. Quando penduramos na outra extremidade da mola um corpo de massa m, a mola passa a ter um
Halliday Fundamentos de Física Volume 1
 Halliday Fundamentos de Física Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica, LTC, Forense,
Halliday Fundamentos de Física Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica, LTC, Forense,
Física Experimental - Mecânica - Plano inclinado com sensores de adesão magnética e software - EQ801A.
 Índice Remissivo... 4 Abertura... 6 Guarantee / Garantia... 7 Certificado de Garantia Internacional... 7 As instruções identificadas no canto superior direito da página pelos números que se iniciam pelos
Índice Remissivo... 4 Abertura... 6 Guarantee / Garantia... 7 Certificado de Garantia Internacional... 7 As instruções identificadas no canto superior direito da página pelos números que se iniciam pelos
1) A seguir são dados operadores lineares T em IR e em IR. Verificar quais são inversíveis e, nos casos afirmativos, determinar uma fórmula para T.
 A seguir são dados operadores lineares T em IR e em IR. Verificar quais são inversíveis e, nos casos afirmativos, determinar uma fórmula para T.") Lista de Exercícios cap 5 1) A seguir são dados operadores lineares T em IR e em IR. Verificar quais são inversíveis e, nos casos afirmativos, determinar uma fórmula para T. a) T: IR²IR², T(x, y) = (3x
Lista de Exercícios cap 5 1) A seguir são dados operadores lineares T em IR e em IR. Verificar quais são inversíveis e, nos casos afirmativos, determinar uma fórmula para T. a) T: IR²IR², T(x, y) = (3x
Lista 5: Trabalho e Energia
 Lista 5: Trabalho e Energia NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder a
Lista 5: Trabalho e Energia NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder a
SISTEMAS DE COORDENADAS
 1 SISTEMAS DE COORDENADAS 2.1 Coordenadas polares no R² Fonte: Cálculo A. Funções. Limite. Derivação. Integração. Diva Marília Flemming. Mírian Buss Gonçalves. Até o presente momento, localizamos um ponto
1 SISTEMAS DE COORDENADAS 2.1 Coordenadas polares no R² Fonte: Cálculo A. Funções. Limite. Derivação. Integração. Diva Marília Flemming. Mírian Buss Gonçalves. Até o presente momento, localizamos um ponto
CÁLCULO NUMÉRICO. Profa. Dra. Yara de Souza Tadano
 CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 22 07/2014 Resolução Numérica de Equações Diferenciais Ordinárias Objetivo: Resolver Equações Diferenciais Ordinárias utilizando
CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 22 07/2014 Resolução Numérica de Equações Diferenciais Ordinárias Objetivo: Resolver Equações Diferenciais Ordinárias utilizando
4.4 Autovalores e Autovetores
 4.4-1 4.4 Autovalores e Autovetores 4.4.1 A Equação de Euler O vetor do momento angular pode ser representado como onde os e i o são os vetores unitários ao longo dos eixos principais, denominados com
4.4-1 4.4 Autovalores e Autovetores 4.4.1 A Equação de Euler O vetor do momento angular pode ser representado como onde os e i o são os vetores unitários ao longo dos eixos principais, denominados com
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES A função de transferência do circuito abaixo em malha fechada é: F(s) = C(s) = G(s)
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA LUGAR DAS RAÍZES A função de transferência do circuito abaixo em malha fechada é: F(s) = C(s) = G(s)
- identificar operadores ortogonais e unitários e conhecer as suas propriedades;
 DISCIPLINA: ELEMENTOS DE MATEMÁTICA AVANÇADA UNIDADE 3: ÁLGEBRA LINEAR. OPERADORES OBJETIVOS: Ao final desta unidade você deverá: - identificar operadores ortogonais e unitários e conhecer as suas propriedades;
DISCIPLINA: ELEMENTOS DE MATEMÁTICA AVANÇADA UNIDADE 3: ÁLGEBRA LINEAR. OPERADORES OBJETIVOS: Ao final desta unidade você deverá: - identificar operadores ortogonais e unitários e conhecer as suas propriedades;
Mecânica dos Fluidos. Análise Dimensional AULA 18. Prof.: Anastácio Pinto Gonçalves Filho
 Mecânica dos Fluidos AULA 18 Análise Dimensional Prof.: Anastácio Pinto Gonçalves Filho Análise Dimensional Muitos problemas práticos de escoamento de fluidos são muitos complexos, tanto geometricamente
Mecânica dos Fluidos AULA 18 Análise Dimensional Prof.: Anastácio Pinto Gonçalves Filho Análise Dimensional Muitos problemas práticos de escoamento de fluidos são muitos complexos, tanto geometricamente
PROGRAMA DE DISCIPLINA CRÉDITOS CARGA HORÁRIA PRÉ REQUISITO T P O 90 MAT01 1-EMENTA
 UNIVERSIDADE FEDERAL DE RORAIMA PRÓ-REITORIA DE GRADUAÇÃO FEDERAL CENTRO DE CIÊNCIAS E TECNOLOGIA DEPARTAMENTO DE FÍSICA PROGRAMA DE DISCIPLINA CÓDIGO FIS01 DISCIPLINA FÍSICA CRÉDITOS CARGA HORÁRIA PRÉ
UNIVERSIDADE FEDERAL DE RORAIMA PRÓ-REITORIA DE GRADUAÇÃO FEDERAL CENTRO DE CIÊNCIAS E TECNOLOGIA DEPARTAMENTO DE FÍSICA PROGRAMA DE DISCIPLINA CÓDIGO FIS01 DISCIPLINA FÍSICA CRÉDITOS CARGA HORÁRIA PRÉ
UNIVERSIDADE FEDERAL DE PELOTAS INSTITUTO DE FÍSICA E MATEMÁTICA Departamento de Física Disciplina: Física Básica II
 UNIVERSIDADE FEDERAL DE PELOTAS INSTITUTO DE FÍSICA E MATEMÁTICA Departamento de Física Disciplina: Física Básica II Perguntas: 1. A figura 1a mostra um instantâneo de uma onda que se propaga no sentido
UNIVERSIDADE FEDERAL DE PELOTAS INSTITUTO DE FÍSICA E MATEMÁTICA Departamento de Física Disciplina: Física Básica II Perguntas: 1. A figura 1a mostra um instantâneo de uma onda que se propaga no sentido
Dinâ micâ de Mâ quinâs e Vibrâçõ es II
 Dinâ micâ de Mâ quinâs e Vibrâçõ es II Aula 1 Revisão e princípios básicos: O objetivo desta aula é recapitular conceitos básicos utilizados em Dinâmica e Vibrações. MCU Movimento circular uniforme 1.
Dinâ micâ de Mâ quinâs e Vibrâçõ es II Aula 1 Revisão e princípios básicos: O objetivo desta aula é recapitular conceitos básicos utilizados em Dinâmica e Vibrações. MCU Movimento circular uniforme 1.
MOVIMENTO BIDIMENSIONAL
 Problemas esolvidos do Capítulo 3 MVIMENT BIDIMENSINAL Atenção Leia o assunto no livro-teto e nas notas de aula e reproduza os problemas resolvidos aqui. utros são deiados para v. treinar PBLEMA 1 Um projétil
Problemas esolvidos do Capítulo 3 MVIMENT BIDIMENSINAL Atenção Leia o assunto no livro-teto e nas notas de aula e reproduza os problemas resolvidos aqui. utros são deiados para v. treinar PBLEMA 1 Um projétil
Lista 9 : Dinâmica Rotacional
 Lista 9 : Dinâmica Rotacional NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Lista 9 : Dinâmica Rotacional NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Exponencial de uma matriz
 Exponencial de uma matriz Ulysses Sodré Londrina-PR, 21 de Agosto de 2001; Arquivo: expa.tex Conteúdo 1 Introdução à exponencial de uma matriz 2 2 Polinômio característico, autovalores e autovetores 2
Exponencial de uma matriz Ulysses Sodré Londrina-PR, 21 de Agosto de 2001; Arquivo: expa.tex Conteúdo 1 Introdução à exponencial de uma matriz 2 2 Polinômio característico, autovalores e autovetores 2
REFINAMENTO PELO MÉTODO DE RIETVELD DE UMA CHAPA LAMINADA COM ORIENTAÇÃO PREFERENCIAL DA LIGA Al-Mg-Si 6063
 REFINAMENTO PELO MÉTODO DE RIETVELD DE UMA CHAPA LAMINADA COM ORIENTAÇÃO PREFERENCIAL DA LIGA A-Mg-Si 6063 J. A. G. Carrió 1 ; N. B. Lima 2 ; A. A. Couto 1,2 ; A. A. Aguiar 2 ; C. S. Hattori 1 ; L. F.
REFINAMENTO PELO MÉTODO DE RIETVELD DE UMA CHAPA LAMINADA COM ORIENTAÇÃO PREFERENCIAL DA LIGA A-Mg-Si 6063 J. A. G. Carrió 1 ; N. B. Lima 2 ; A. A. Couto 1,2 ; A. A. Aguiar 2 ; C. S. Hattori 1 ; L. F.
Física I 2009/2010. Aula02 Movimento Unidimensional
 Física I 2009/2010 Aula02 Movimento Unidimensional Sumário 2-1 Movimento 2-2 Posição e Deslocamento. 2-3 Velocidade Média 2-4 Velocidade Instantânea 2-5 Aceleração 2-6 Caso especial: aceleração constante
Física I 2009/2010 Aula02 Movimento Unidimensional Sumário 2-1 Movimento 2-2 Posição e Deslocamento. 2-3 Velocidade Média 2-4 Velocidade Instantânea 2-5 Aceleração 2-6 Caso especial: aceleração constante
REVISÃO DE TRIGONOMETRIA E GEOMETRIA ANALÍTICA
 UNIVERSIDADE DE SÃO PAULO ESCOLA SUPERIOR DE AGRICULTURA LUIZ DE QUEIROZ DEPARTAMENTO DE ENGENHARIA DE BIOSSISTEMAS LEB340 TOPOGRAFIA E GEOPROCESSAMENTO I PROF. DR. CARLOS ALBERTO VETTORAZZI REVISÃO DE
UNIVERSIDADE DE SÃO PAULO ESCOLA SUPERIOR DE AGRICULTURA LUIZ DE QUEIROZ DEPARTAMENTO DE ENGENHARIA DE BIOSSISTEMAS LEB340 TOPOGRAFIA E GEOPROCESSAMENTO I PROF. DR. CARLOS ALBERTO VETTORAZZI REVISÃO DE
Superfícies Parametrizadas
 Universidade Estadual de Maringá - epartamento de Matemática Cálculo iferencial e Integral: um KIT de Sobrevivência c Publicação eletrônica do KIT http://www.dma.uem.br/kit Superfícies Parametrizadas Prof.
Universidade Estadual de Maringá - epartamento de Matemática Cálculo iferencial e Integral: um KIT de Sobrevivência c Publicação eletrônica do KIT http://www.dma.uem.br/kit Superfícies Parametrizadas Prof.
Exercícios complementares - Física
 - Física Exercícios Conteúdo Habilidade 1, 2 e 3 Grandezas físicas e unidades de medidas 4 Aceleração média 5 Força resultante 6 Gráficos do M.R.U. e M.R.U.V. 7 Leis de Newton 8, 9 10 e 11 Trabalho e energia
- Física Exercícios Conteúdo Habilidade 1, 2 e 3 Grandezas físicas e unidades de medidas 4 Aceleração média 5 Força resultante 6 Gráficos do M.R.U. e M.R.U.V. 7 Leis de Newton 8, 9 10 e 11 Trabalho e energia
Universidade do Estado do Rio de Janeiro - Instituto de Física Lista de exercícios para a P2 - Física 1
 Universidade do Estado do Rio de Janeiro - Instituto de Física Lista de exercícios para a P2 - Física 1 1. Dois corpos A e B, de massa 16M e M, respectivamente, encontram-se no vácuo e estão separados
Universidade do Estado do Rio de Janeiro - Instituto de Física Lista de exercícios para a P2 - Física 1 1. Dois corpos A e B, de massa 16M e M, respectivamente, encontram-se no vácuo e estão separados
III CAPÍTULO 21 ÁREAS DE POLÍGONOS
 1 - RECORDANDO Até agora, nós vimos como calcular pontos, retas, ângulos e distâncias, mas não vimos como calcular a área de nenhuma figura. Na aula de hoje nós vamos estudar a área de polígonos: além
1 - RECORDANDO Até agora, nós vimos como calcular pontos, retas, ângulos e distâncias, mas não vimos como calcular a área de nenhuma figura. Na aula de hoje nós vamos estudar a área de polígonos: além
FÍSICA. Fornece uma compreensão quantitativa de certos fenómenos que ocorrem no Universo.
 Introdução e Vectores FÍSICA Prof. Marília Peres Adaptado de Serway & Jewett Sobre a Física Fornece uma compreensão quantitativa de certos fenómenos que ocorrem no Universo. Baseia-se em observações experimentais
Introdução e Vectores FÍSICA Prof. Marília Peres Adaptado de Serway & Jewett Sobre a Física Fornece uma compreensão quantitativa de certos fenómenos que ocorrem no Universo. Baseia-se em observações experimentais
Triângulos especiais
 A UA UL LA Triânguos especiais Introdução Nesta aua, estudaremos o caso de dois triânguos muito especiais - o equiátero e o retânguo - seus ados, seus ânguos e suas razões trigonométricas. Antes, vamos
A UA UL LA Triânguos especiais Introdução Nesta aua, estudaremos o caso de dois triânguos muito especiais - o equiátero e o retânguo - seus ados, seus ânguos e suas razões trigonométricas. Antes, vamos
Álgebra Linear I - Aula 5. Roteiro
 1. Produto vetorial. 2. Aplicações. 3. Produto misto. Álgebra Linear I - Aula 5 1 Produto vetorial Roteiro Definição: Dados vetores ū = (u 1, u 2, u 3 ) e v = (v 1, v 2, v 3 ) de R 3 definimos o produto
1. Produto vetorial. 2. Aplicações. 3. Produto misto. Álgebra Linear I - Aula 5 1 Produto vetorial Roteiro Definição: Dados vetores ū = (u 1, u 2, u 3 ) e v = (v 1, v 2, v 3 ) de R 3 definimos o produto
Teorema da Divergência
 Instituto Superior Técnico epartamento de atemática Secção de Álgebra e Análise Prof. Gabriel Pires Teorema da ivergência Nestas notas apresentaremos o teorema da divergência em R 3 (Teorema de Gauss devido
Instituto Superior Técnico epartamento de atemática Secção de Álgebra e Análise Prof. Gabriel Pires Teorema da ivergência Nestas notas apresentaremos o teorema da divergência em R 3 (Teorema de Gauss devido
2.1 TENSÕES NORMAIS E DEFORMAÇÕES ESPECÍFICAS NO PONTO GENÉRICO
 2 ESTADO TRIPLO DE TENSÕES No ponto genérico de um corpo carregado, para cada plano que o contém, define-se um vetor tensão. Como o ponto contém uma família de planos, tem-se também uma família de vetores
2 ESTADO TRIPLO DE TENSÕES No ponto genérico de um corpo carregado, para cada plano que o contém, define-se um vetor tensão. Como o ponto contém uma família de planos, tem-se também uma família de vetores
Física Geral I. 1º semestre /05. Nas primeiras seis perguntas de escolha múltipla, indique apenas uma das opções. R 1 R 2
 Física Geral I 1º semestre - 2004/05 3 TESTE DE AVALIAÇÃO 2668 - ENSINO DE FÍSICA E QUÍMICA 1487 - OPTOMETRIA E OPTOTECNIA - FÍSICA APLICADA 12 de Janeiro 2005 Duração: 2 horas + 30 min tolerância Nas
Física Geral I 1º semestre - 2004/05 3 TESTE DE AVALIAÇÃO 2668 - ENSINO DE FÍSICA E QUÍMICA 1487 - OPTOMETRIA E OPTOTECNIA - FÍSICA APLICADA 12 de Janeiro 2005 Duração: 2 horas + 30 min tolerância Nas
Geometria Analítica. Geometria Analítica 28/08/2012
 Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Calculando a rpm e o gpm a partir da
 Acesse: http://fuvestibuar.com.br/ Cacuando a rpm e o gpm a partir da veocidade de corte A UU L AL A Para que uma ferramenta corte um materia, é necessário que um se movimente em reação ao outro a uma
Acesse: http://fuvestibuar.com.br/ Cacuando a rpm e o gpm a partir da veocidade de corte A UU L AL A Para que uma ferramenta corte um materia, é necessário que um se movimente em reação ao outro a uma
Agrupamento de Escolas da Senhora da Hora
 Agrupamento de Escolas da Senhora da Hora Curso Profissional de Técnico de Multimédia Informação Prova da Disciplina de Física - Módulo: 1 Forças e Movimentos; Estática Modalidade da Prova: Escrita Ano
Agrupamento de Escolas da Senhora da Hora Curso Profissional de Técnico de Multimédia Informação Prova da Disciplina de Física - Módulo: 1 Forças e Movimentos; Estática Modalidade da Prova: Escrita Ano