Robótica Industrial. Projeto de Manipuladores
|
|
|
- Aparecida Schmidt Dias
- 8 Há anos
- Visualizações:
Transcrição
1 Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1

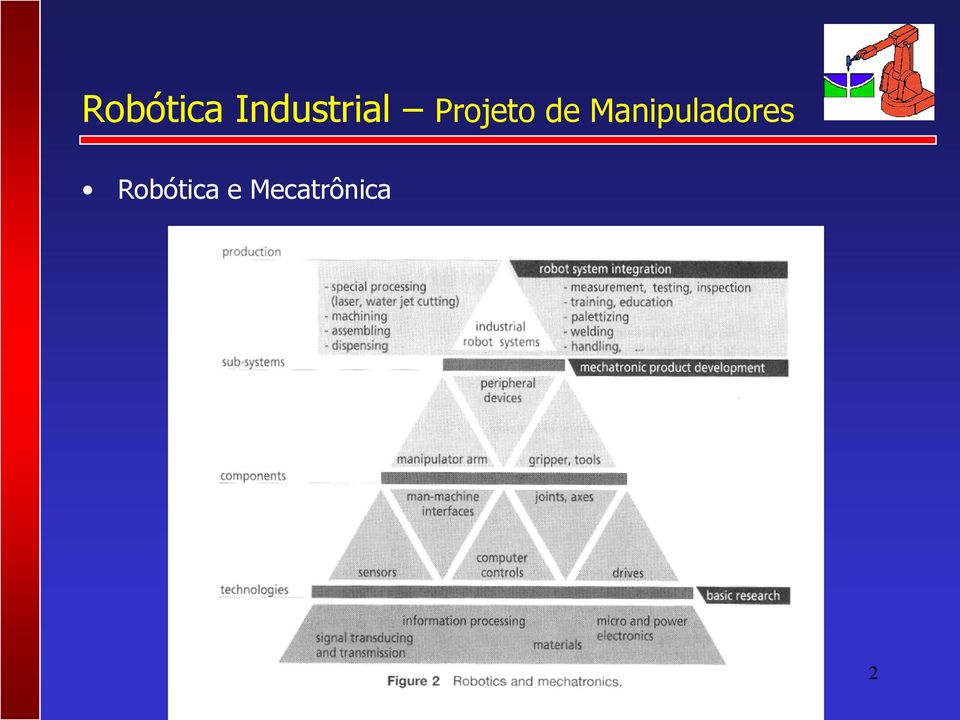
2 Robótica e Mecatrônica 2
3 Princípios de Engenharia de Sistemas Robóticos Planejamento de Produto Principais dados de desempenho Previsão de custos Quantidades Meios de Distribuição Tempo e custo do desenvolvimento de projeto 3

4 Princípios de Engenharia de Sistemas Robóticos Projeto de Tarefas 4

5 Princípios de Engenharia de Sistemas Robóticos Projeto de Tarefas Robôs de aplicação específica 5

6 Princípios de Engenharia de Sistemas Robóticos Projeto de Tarefas 6

7 Princípios de Engenharia de Sistemas Robóticos Análise Funcional Critérios Fixos que têm de ser alcançados Critérios Alvos que devem ser alcançados Desejos (critério é bom ter ) 7

8 Performance Básica e Critérios de Funcionalidade de um Robô Critérios Capacidade de Carga Graus de Liberdade Objetos manipulados/ferramentas Características da Tarefa Caracterização Peso, inércia do objeto manipulado e elemento terminal Movimentos externos / forças sobre o elemento terminal ou eixos Histórico de Carga: estático, periódico, estocástico Destreza exigida para o elemento terminal Número de graus de liberdade de periféricos (mesa motorizada etc...) Dimensões, tamanhos de objetos / partes Tipo de ferramenta (tocha, garra, fresa etc...) Interfaces com o robô Mudança de garra para ferramenta Apresentação do objeto / parte Acessibilidade de objetos / partes Tolerâncias (partes, apresentação de partes) Fixação e posicionamento Velocidade, aceleração Precisão Precisão de Posicionamento Repetibilidade Precisão de trajetória 8
 Interfaces com o robô Mudança de garra para ferramenta Apresentação do objeto / parte Acessibilidade de objetos / partes Tolerâncias (partes, apresentação de partes) Fixação e posicionamento")
9 Performance Básica e Critérios de Funcionalidade de um Robô Critérios Caracterização Controle de Trajetória Ponto-a-ponto (PTP) Trajetória contínua (CP), perfil de movimento Movimento Circular Condições do Ambiente Parâmetros quantificáveis (ruído, vibração, temperatura etc. ) Parâmetros não-quantificáveis Critérios Econômicos Custo de manufatura, custo de desenvolvimento Ponto de lucro, tradeoffs Tempo de entrega Qualidade Capacidade (tempos de ciclo típicos, produtividade, etc... Pontos de venda (robô, célula de trabalho, linhas de produção) 9
 Parâmetros não-quantificáveis Critérios Econômicos Custo de manufatura, custo de desenvolvimento Ponto de lucro, tradeoffs Tempo de")
10 Performance Básica e Critérios de Funcionalidade de um Robô Critérios Caracterização Reparo, Manutenção Flexibilidade Instalação Programação (on-line, off-line) Manutenção remota Tarefas e ciclos de manutenção Permutabilidade de módulos e partes Célula de trabalho, integração CIM (interfaces lógicas e geométricas) Erros de manuseio, diagnósticos Cooperação com dispositivos periféricos como mesas, equpamento de manuseio de materiais e outros robôs 10

11 Princípios de Engenharia de Sistemas Robóticos Projeto dos Sistemas de um Robô 11

12 Princípios de Engenharia de Sistemas Robóticos Projeto dos Sistemas de um Robô Conceito do Robô Passo do Processo Resultado Seleção da Estrutura Cinemática Estrutura Cinemática Estimativa dos parâmetro de elos e juntas Seleção dos princípios de transmissão Seleção dos componentes de transmissão Modelo Cinemático (parâmetros de D-H) e curso de juntas Estrutura do sistema de atuação nas juntas Dados geométricos e de desempenho, e interfaces com componentes selecionados 12

13 Projeto Estrutural do Robô e Otimização Passo do Processo Resultado Otimização dos elos do robô e de parâmetros de juntas (parâmetros de D-H) Otimização do desempenho cinético Seleção de motores, engrenagens, mancais e acoplamentos Mínimo número de graus de liberdade, destreza cinemática Máximo Espaço de Trabalho Tempo mínimo de movimento Mínima aceleração das juntas Torque máximos Picos mínimos de torque (perfis de torque uniformes) Máxima dissipação de calor Cabeamento Seleção de materiais Dimensionamento de eixos, invólucros, base e flange da ferramenta Mínimo dobramento e ocupação de espaço Mínimo peso, usinabilidade, corrosão Máxima rigidez Mínima usinagem, peso, número de partes e montagens 13

14 Projeto dos Detalhes do Robô Passo do Processo Resultado Projeto das partes Montagem dos Sistemas do Robô Projeto Elétrico e Eletrônico (gabinete de comando) Desenho das partes Lista de materiais, montagem e instruções de calibração Layout do circuito elétrico dos materiais Documentação Manual de operação, instruções de serviço 14

15 Projeto Cinemático de Robôs Robô Industrial de acordo com a ISO 8373 Cadeias Cinemáticas com pelo menos 3 elos e juntas Descrição Cinemática se divide em: Braço: conjunto de elos inter-conectados e juntas motorizadas que suportam ou movem um pulso e uma mão ou elemento terminal (garra ou ferramenta) Pulso: um conjunto de juntas entre o braço e a mão que permitem à mão se orientar no espaço de trabalho. O pulso serve para orientação e pequenas variações de posição. 15

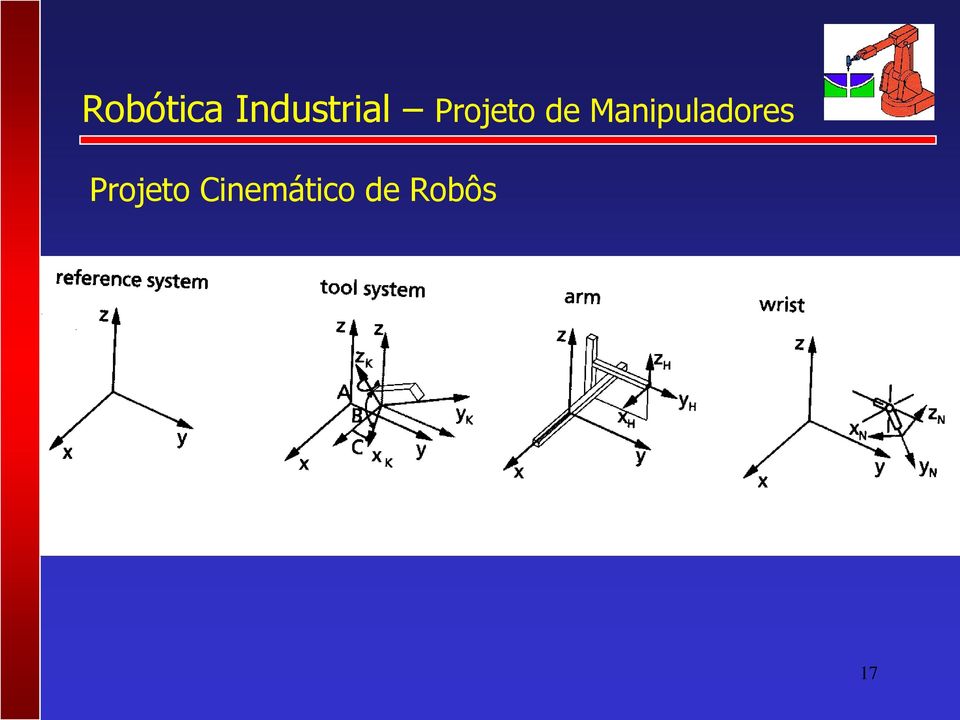
16 Projeto Cinemático de Robôs Definições Sistemas de referência: localiza a base do robô e a posição zero dos eixos e pulso. Sistema da ferramenta: descreve a posição de uma garra ou ferramenta com 6 gls (x,y,z,a,b,c). Manipulador (braço e pulso): elo entre o sistema de referência e o sistema da ferramenta. 16
.")
17 Projeto Cinemático de Robôs 17
18 Projeto Cinemático de Robôs Configuração Cinemática de um Robô Eixos são classificados como: Rotação: permitem rotação relativa entre dois elos em torno de um eixo fixo. Translação: permite dois eixos terem movimento relativo linear entre si. Junta complexa: permitem rotação relativa entre 2 elos conectados, em torno de um eixo móvel. 18

19 Projeto Cinemático de Robôs Um grande número de juntas (gls) é indesejável por: Precisão de posicionamento decresce com o número de eixos O desempenho cinetostático depende diretamente da escolha da configuração cinemática do robô e seus parâmetros de elos e juntas Transmissão de força se torna mais difícil à medida que o número de eixos aumenta. 19

20 Fig

21 21
22 22
23 23
24 24
25 25
26 26
27 Cadeia dos Atuadores 27
28 Simulação da cadeia dos atuadores 28
29 Princípio de Acionamento Princípio dos Servo-atuadores Campo de Aplicação Vantagens Desvantagens Hidráulico Manipuladores com cargas muito pesadas e/ou grande espaço de trabalho Alta dinâmica Razão potência/peso muito alta Exigência de equipamentos: bombas, mangueiras, servo-válvulas "Suja" Exige manutenção Baixa eficiência Elétrico Padrão para robôs industriais Alta dinâmica Controlabilidade muito boa Faixa de potência grande Faixa de velocidade grande Caixa de redução necessária Aquecimento 29
30 Servo-atuadores Atuadores Elétricos Motores de Passo Controle de velocidade e posição em malha aberta. Baixo custo e facilmente atuado por circuitos eletrônicos Pode-se conseguir até passos/rev, às custas de baixa rigidez magnética Em malha aberta => não-amortecidos e sujeitos a vibrações, podendo ser amortecidos mecanicamente ou por algoritmos de controle de malha fechada. Relação potência/peso é baixa. 30
31 Servo-atuadores Atuadores Elétricos Motores de Corrente Contínua Velocidade se mantem aprox/te constante sob variações de carga. Controle de velocidade fácil via corrente da armadura. Desgate em escovas e comutadores mecânicos. Avanços recentes em comutadores elevam vida útil de escovas a horas. 31
32 Servo-atuadores Atuadores Elétricos Motores de Corrente Alternada Desenvolvimento de novos tipos de magnetos tornaram esses motores mais potentes. Potência: 10-20kw Vel.: até rpm Quase não precisam manutenção => comutação do campo magnético rotativo é sem contato. 32
33 Servo-atuadores Atuadores Elétricos Motores de Corrente Alternada Motores Assíncronos Mais robustos que motores síncronos e têm densidade de potência mais alta. Potência: até 80 kw Vel.: até rpm Pode trabalhar com potência de saída constante mesmo acima da rotação nominal, o que é uma grande vantagem. 33
34 Tipos de Servo motores Tipos de Servo-motores Máxima Potência de Saída Propriedades Específicas Motor de Passo 1 kw Funciona em malha aberta Aquece quando travado Dinâmica pobre Motor CC de escovas 5 kw Boa controlabilidade via corrente da armadura Alto torque de partida Escovas sujeitas a desgaste Motor CC sem escovas 10kw Livre de manutenção Comutação por resolver, ou efeito Hall ou sensor ótico Motor síncrono CA 20 kw Motor assíncrono CA 80 kw Livre de manutenção Motor muito robusto Faixa de velocidades bastante ampla Caro para controlar 34
35 Servo-atuadores Atuadores Elétricos Atuadores Lineares Princípio é de um motor elétrico rotativo desenrolado. Em robôs cartesianos podem ser usados para tarefas de pick-and-place altamente dinâmicas. Maiores velocidades do que transmissão por fusos. Veloc.: até 3m/s Acel.: até 10g Devem substituir transmissão linear por fusos em aplicações de alta velocidade no futuro próximo 35
36 36
37 Servo-atuadores Atuadores Servo-eletro-hidráulicos Motor e cilindro hidráulico e servo-válvula para controlar o motor. Atuadores servo-eletro-hidráulicos têm muito boa dinâmica se em malha fechada e dotados de encoders de posição. Necessitam muito equipamento, manutenção e têm baixa eficiência. 37
38 38
39 Engrenagens Servo-atuadores elétricos (motores) têm eficiência aceitável (até 95%) quando n > rpm (exceção SCARA) Reduzem as forças de inércia do braço do robô no servo-atuador 39
40 Engrenagens Desvantagens Folga => afeta exatidão de posição e controle São elásticas => provocam oscilação torcional Exigências de Qualidade Valores Típicos Folga muito pequena Alta eficiência Alta redução em poucos passos Baixa inércia, baixa fricção Alta rigidez torcional Alta densidade de potência, baixo peso Poucos arco-minutos 80-95% Depende do tamanho da engrenagem Depende do tamanho da engrenagem 40
41 Engrenagens Engrenagens para Movimento Linear São encontradas em: Robôs cartesianos para pick-and-place Eixos verticais de robôs tipo SCARA Robôs tipo Gantry Eixos periféricos (base de robôs articulados) 41
42 Engrenagens Engrenagens para Movimento Linear Exigências de Qualidade para Engrenagens de Robôs Tipo de Engrenamento Faixas comuns de juntas Precisão Carga Correia Dentada < 10 m Máx. 0,1 mm Pequena a média Fuso de Esferas < 5 m Máx. 0,001 mm Pequena a média Pinhão e Cremalheira teoricamente ilimitado Máx. 0,01 mm Média a alta 42
43 Engrenagens 43
44 Engrenagens Engrenagens para Movimento Rotativo Todos os robôs articulados e tipo SCARA Tipo de Engrenagem Propriedades Típicas Aplicação Engrenagem planetária Harmonic Drive Engrenagem Cicloidal Engrenagem Evolvental Eficiência muito alta Muito compacta Alta redução com única engrenagem Pequenos a médios torques Alta eficiência Alto torque Muito compacta Alta redução com única engrenagem Pequenos a médios torques Eixos da base Eixos do pulso Eixos da base Eixos do pulso 44
45 Engrenagens 45
46 Engrenagens 46
47 Engrenagens Engrenagens para Movimento Rotativo Todos os robôs articulados e tipo SCARA 47
48 Engrenagens 48
49 Engrenagens 49
50 Acoplamentos Neutraliza desalinhamento entre eixos instalados entre o servo-motor e as engrenagens e entre o servo-motor e o encoder Transmitem torque e movimento rotativo Em sua aplicação deve ser consideradas: Rigidez torcional Amortecimento 50
51 Acoplamentos 51
52 Sistemas de Medição Fornecem sinal de posição da junta do robô ao controlador Resolução é fator limitante 3 tipos de encoders são comumente encontrados na robótica industrial Óptico Absoluto Óptico Incremental Resolver 52
53 Sistemas de Medição Óptico Absoluto Fileira de LED s emite luz através de disco codificador fixo na junta do robô, com trilhas de padrões brancos e pretos. Sinal óptico transformado em elétrico por chip (circuito integrado de aplicação específica - ASIC), consistindo de fileiras de diodos foto voltaicos, comparador, memória, inversor de código e atuador. Resolução típica ==> bits 53
54 Sistemas de Medição Óptico Absoluto 54
55 Sistemas de Medição Óptico Incremental Sinal apenas relativo, pulsos precisam de referência para serem contados Pode haver perda do ponto de referência se houver perda de energia Cada eixo precisa ser recalibrado Resolução até / revol. Por interpolação do sinal pode-se aumentar até 10 vezes a resolução. Em aplicações onde há exigências de alta precisão de posicionamento, é a única opção. 55
56 Sistemas de Medição Óptico Incremental 56
57 Sistemas de Medição Resolver Sinal angular absoluto em uma rotação Uso de engrenagens permite sinal contínuo por mais de uma revolução Alta resolução, robustos, baratos, fácil uso em eixos ocos Uso tem crescido 57
58 Sistemas de Medição Resolver 58
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras Tipos de Sistemas
Prof. Daniel Hasse Robótica Industrial Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras Tipos de Sistemas
Sensores. Sensor. Passivos: Chave Potenciômetro Energia Auxiliar. Ativos: Célula Fotoelétrica Cristal Piezoelétrico. Digitais: Encoder Régua Óptica
 Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES
 TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES 1) MOTORES Motores de passo e servo-motores (com ou sem escovas) têm cada um suas respectivas vantagens e desvantagens. Em geral não existe
TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES 1) MOTORES Motores de passo e servo-motores (com ou sem escovas) têm cada um suas respectivas vantagens e desvantagens. Em geral não existe
Sensores e Atuadores (2)
") (2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
(2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
Transmissões de Potência
 Transmissões de Potência PMR 2201 Transmissões O emprego de transmissões torna-se necessário para compatibilizar a velocidade angular ou conjugado da máquina motriz com a necessidade da máquina acionada,
Transmissões de Potência PMR 2201 Transmissões O emprego de transmissões torna-se necessário para compatibilizar a velocidade angular ou conjugado da máquina motriz com a necessidade da máquina acionada,
Curso Automação Industrial Aula 3 Robôs e Seus Periféricos. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos
Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
Tecnologia Eletromecânica. Atuadores eletromecânicos
 Tecnologia Eletromecânica Atuadores eletromecânicos 3 de junho de 2014 Parker Eletromecânica Entendendo as necessidades do cliente Gerenciamento do Projeto Analise do Sistema Aceite dos Parametros de teste
Tecnologia Eletromecânica Atuadores eletromecânicos 3 de junho de 2014 Parker Eletromecânica Entendendo as necessidades do cliente Gerenciamento do Projeto Analise do Sistema Aceite dos Parametros de teste
Fundamentos de Automação. Atuadores e Elementos Finais de Controle
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
UNICAMP Faculdade de Engenharia Elétrica
 UNICAMP Faculdade de Engenharia Elétrica e de Computação EA-617 Introdução à Simulação Analógica Experiência 4: Equipamentos ECP 1 Sumário 1 Introdução 1 2 Descrição dos Sistemas 2 2.1 Emulador Industrial...............................
UNICAMP Faculdade de Engenharia Elétrica e de Computação EA-617 Introdução à Simulação Analógica Experiência 4: Equipamentos ECP 1 Sumário 1 Introdução 1 2 Descrição dos Sistemas 2 2.1 Emulador Industrial...............................
Motores em miniatura proporcionam um grande desempenho para analisadores médicos
 thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
------------------------------- -----------------------------Henflex. Henflex------------------------------ Índice
 Índice 1.Características Gerais... 2 2.Seleção do Tamanho do Acoplamento... 2 2.1- Dimensionamento dos acoplamentos Henflex HXP para regime de funcionamento contínuo... 2 2.2 Seleção do Acoplamento...
Índice 1.Características Gerais... 2 2.Seleção do Tamanho do Acoplamento... 2 2.1- Dimensionamento dos acoplamentos Henflex HXP para regime de funcionamento contínuo... 2 2.2 Seleção do Acoplamento...
Sensores - Encoder. Encoder linear Mesmo princípio de funcionamento dos encoders rotativos; Podem ser incremental ou absoluto.
 Sensores - Encoder Encoder linear Mesmo princípio de funcionamento dos encoders rotativos; Podem ser incremental ou absoluto. Sensores - Resolvers Usado para medição de posição angular. Princípio de funcionamento
Sensores - Encoder Encoder linear Mesmo princípio de funcionamento dos encoders rotativos; Podem ser incremental ou absoluto. Sensores - Resolvers Usado para medição de posição angular. Princípio de funcionamento
Aula -2 Motores de Corrente Contínua com Escovas
 Aula -2 Motores de Corrente Contínua com Escovas Introdução Será descrito neste tópico um tipo específico de motor que será denominado de motor de corrente contínua com escovas. Estes motores possuem dois
Aula -2 Motores de Corrente Contínua com Escovas Introdução Será descrito neste tópico um tipo específico de motor que será denominado de motor de corrente contínua com escovas. Estes motores possuem dois
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Selecione o tipo de rolamento e configuração. Limitações dimensionais
 Seleção do 2. Seleção do Os s e de estão disponíveis numa variedade de tipos, formas e dimensões. Quando se faz a correta seleção do para a sua aplicação, é importante considerar diversos fatores, e analisar
Seleção do 2. Seleção do Os s e de estão disponíveis numa variedade de tipos, formas e dimensões. Quando se faz a correta seleção do para a sua aplicação, é importante considerar diversos fatores, e analisar
Principais funções de movimento em analisadores médicos.
 Movimento em analisadores médicos Menor, mais rápido, mais forte. Como os motores em miniatura estão ajudando os equipamentos de diagnóstico a avançar. Os diagnósticos médicos fazem parte da vida cotidiana
Movimento em analisadores médicos Menor, mais rápido, mais forte. Como os motores em miniatura estão ajudando os equipamentos de diagnóstico a avançar. Os diagnósticos médicos fazem parte da vida cotidiana
Espaço de Trabalho. θ 2
 1. ROBÓTICA: CONCEITOS BÁSICOS 1.1 Robôs Manipuladores: Robô: Máquina universal programável que tem existência no mundo físico e atua nele através de movimentos mecânicos. Espaço de Trabalho: Região do
1. ROBÓTICA: CONCEITOS BÁSICOS 1.1 Robôs Manipuladores: Robô: Máquina universal programável que tem existência no mundo físico e atua nele através de movimentos mecânicos. Espaço de Trabalho: Região do
CORRENTES. A transmissão por corrente de rolo é um meio altamente eficiente e versátil para transmitir potência mecânica em aplicações industriais.
 CORRENTES Definição A transmissão por corrente de rolo é um meio altamente eficiente e versátil para transmitir potência mecânica em aplicações industriais. A corrente de rolo é tão flexível como as correias
CORRENTES Definição A transmissão por corrente de rolo é um meio altamente eficiente e versátil para transmitir potência mecânica em aplicações industriais. A corrente de rolo é tão flexível como as correias
CARACTERÍSTICAS TÉCNICAS
 CARACTERÍSTICAS TÉCNICAS O acoplamento ACRIFLEX AD, consiste em dois flanges simétricos inteiramente usinados, pinos de aço com superfícies retificadas e buchas amortecedoras de borracha nitrílica à prova
CARACTERÍSTICAS TÉCNICAS O acoplamento ACRIFLEX AD, consiste em dois flanges simétricos inteiramente usinados, pinos de aço com superfícies retificadas e buchas amortecedoras de borracha nitrílica à prova
PB e PBL. Lubrificação por Graxa Sintética
 PB e PBL Características PB PBL sb sbl se sel sd sdl sf sfl Engrenagens de Dentes Helicoidais Mecanismos de redução de primeira linha empregar engrenagens de dentes helicoidais, que fornecem uma taxa de
PB e PBL Características PB PBL sb sbl se sel sd sdl sf sfl Engrenagens de Dentes Helicoidais Mecanismos de redução de primeira linha empregar engrenagens de dentes helicoidais, que fornecem uma taxa de
Curso de Especialização em Engenharia Automotiva. Módulo: Transmissões
 Curso de Especialização em Engenharia Automotiva Módulo: Realização: Parceria: CVT (Continuous Variable Transmission) Com a tecnologia CVT o torque do motor é transmitido a uma polia motriz ligada a uma
Curso de Especialização em Engenharia Automotiva Módulo: Realização: Parceria: CVT (Continuous Variable Transmission) Com a tecnologia CVT o torque do motor é transmitido a uma polia motriz ligada a uma
GSR-R. Tipo separado de guia linear (radial) modelo GSR-R
 modelo GSR-R") Tipo separado de guia linear (radial) modelo Trilho com cremalheira Recirculador Raspador Bloco Diagrama de Seleção A Posições de montagem Opcionais Codificação Precauções de uso Acessórios para lubrificação
Tipo separado de guia linear (radial) modelo Trilho com cremalheira Recirculador Raspador Bloco Diagrama de Seleção A Posições de montagem Opcionais Codificação Precauções de uso Acessórios para lubrificação
1. TRANSMISSÕES POR CORRENTES
 1 1. TRANSMISSÕES POR CORRENTES 1.1 - Introdução As correntes fazem parte das transmissões flexíveis, conjuntamente com as correias. Apresentam menor capacidade de absorção de choques em virtude de sua
1 1. TRANSMISSÕES POR CORRENTES 1.1 - Introdução As correntes fazem parte das transmissões flexíveis, conjuntamente com as correias. Apresentam menor capacidade de absorção de choques em virtude de sua
Curriculum de Mecânica dos Fluidos
 Curriculum de Mecânica dos Fluidos A Nível I Introdução à Mecânica dos Fluidos (30 horas) A.1 - Princípios e grandezas físicas em Mecânica dos Fluidos A1.1 Conceitos físico-matemáticos elementares A.1.1.1
Curriculum de Mecânica dos Fluidos A Nível I Introdução à Mecânica dos Fluidos (30 horas) A.1 - Princípios e grandezas físicas em Mecânica dos Fluidos A1.1 Conceitos físico-matemáticos elementares A.1.1.1
4 CARACTERÍSTICAS TÉCNICAS
 1 4 CARACTERÍSTICAS TÉCNICAS Os acoplamentos ACRIFLEX AG são compostos por dois cubos simétricos de ferro fundido cinzento, e um elemento elástico alojado entre eles, de borracha sintética de elevada resistência
1 4 CARACTERÍSTICAS TÉCNICAS Os acoplamentos ACRIFLEX AG são compostos por dois cubos simétricos de ferro fundido cinzento, e um elemento elástico alojado entre eles, de borracha sintética de elevada resistência
TÉCNICO EM MECÂNICA NOME: Nº INSC.: PRRH. Pró-Reitoria de Recursos Humanos
 TÉNIO M MÂNI NOM: Nº INS.: PRRH Pró-Reitoria de Recursos Humanos Para a usinagem de uma engrenagem de 55 dentes, de módulo 2 mm, foi utilizada uma barra de seção circular de 5". onsiderando a necessidade
TÉNIO M MÂNI NOM: Nº INS.: PRRH Pró-Reitoria de Recursos Humanos Para a usinagem de uma engrenagem de 55 dentes, de módulo 2 mm, foi utilizada uma barra de seção circular de 5". onsiderando a necessidade
Cortina Elétrica com Controle Remoto
 FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA CURSO TÉCNICO EM MECÂNICA 1º SÉRIE DO ENSINO MÉDIO Turma 3111 Trabalho Trimestral de Física Cortina Elétrica com Controle Remoto Arian Müller (03)
FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA CURSO TÉCNICO EM MECÂNICA 1º SÉRIE DO ENSINO MÉDIO Turma 3111 Trabalho Trimestral de Física Cortina Elétrica com Controle Remoto Arian Müller (03)
Estudo e Modelagem Computacional de um Robô Aplicado em Processos de Usinagem
 Universidade Federal de São João Del-Rei MG 26 a 28 de maio de 2010 Associação Brasileira de Métodos Computacionais em Engenharia Estudo e Modelagem Computacional de um Robô Aplicado em Processos de Usinagem
Universidade Federal de São João Del-Rei MG 26 a 28 de maio de 2010 Associação Brasileira de Métodos Computacionais em Engenharia Estudo e Modelagem Computacional de um Robô Aplicado em Processos de Usinagem
. linear ou rotativo. analógico ou digital. absoluto, incremental ou incremental-absoluto. princípio de operação
 8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS
 INFORMATIVO TÉCNICO N 019/09 INFORMATIVO TÉCNICO PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS 1/21 INFORMATIVO TÉCNICO N 019/09 O PRINCIPAL COMPONENTE DE
INFORMATIVO TÉCNICO N 019/09 INFORMATIVO TÉCNICO PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS 1/21 INFORMATIVO TÉCNICO N 019/09 O PRINCIPAL COMPONENTE DE
AUTOMAÇÃO DE CÚPULA DE OBSERVATÓRIO ASTRONÔMICO
 AUTOMAÇÃO DE CÚPULA DE OBSERVATÓRIO ASTRONÔMICO Marcella Scoczynski Ribeiro (UTFPR/UEPG) marcella_engcomp@yahoo.com.br Matheus Safraid (UEPG) msafraid@hotmail.com Resumo Este trabalho apresenta os benefícios
AUTOMAÇÃO DE CÚPULA DE OBSERVATÓRIO ASTRONÔMICO Marcella Scoczynski Ribeiro (UTFPR/UEPG) marcella_engcomp@yahoo.com.br Matheus Safraid (UEPG) msafraid@hotmail.com Resumo Este trabalho apresenta os benefícios
AS CARACTERÍSTICAS PRINCIPAIS DO MOTOR INCLUEM...
 Motores H-Compact COMPACTO, REFRIGERAÇÃO EFICIENTE A importância crescente da economia de energia, dos requerimentos ambientais, da procura por dimensões menores e das imposições dos mercados nacionais
Motores H-Compact COMPACTO, REFRIGERAÇÃO EFICIENTE A importância crescente da economia de energia, dos requerimentos ambientais, da procura por dimensões menores e das imposições dos mercados nacionais
INTRODUÇÃO À DINÂMICA E AO CONTROLE DE MANIPULADORES ROBÓTICOS
 INTRODUÇÃO À DINÂMICA E AO CONTROLE DE MANIPULADORES ROBÓTICOS APOSTILA COMPILADA PELO PROF. RENATO MOLINA DA SILVA, PARA USO DOS ALUNOS DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO DA PUCRS, COM BASE
INTRODUÇÃO À DINÂMICA E AO CONTROLE DE MANIPULADORES ROBÓTICOS APOSTILA COMPILADA PELO PROF. RENATO MOLINA DA SILVA, PARA USO DOS ALUNOS DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO DA PUCRS, COM BASE
Conheça nossa empresa
 Conheça nossa empresa Empresa Damaeq Integridade, Vontade de Superar-se, Satisfação do Cliente. MODELO PANDA 2015 Novo coletor compactador modelo PANDA 2015, com capacidade para 15m³ ou 19m³ de lixo compactado.
Conheça nossa empresa Empresa Damaeq Integridade, Vontade de Superar-se, Satisfação do Cliente. MODELO PANDA 2015 Novo coletor compactador modelo PANDA 2015, com capacidade para 15m³ ou 19m³ de lixo compactado.
Seleção de motores em miniatura para os seus dispositivos médicos Avanços recentes aumentam a portabilidade, eficiência e confiabilidade
 thinkmotion Seleção de motores em miniatura para os seus dispositivos médicos Avanços recentes aumentam a portabilidade, eficiência e confiabilidade A criação de bombas de infusão pequenas e portáteis
thinkmotion Seleção de motores em miniatura para os seus dispositivos médicos Avanços recentes aumentam a portabilidade, eficiência e confiabilidade A criação de bombas de infusão pequenas e portáteis
ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102
 Universidade Federal do Paraná Curso de Engenharia Industrial Madeireira ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102 Dr. Alan Sulato de Andrade alansulato@ufpr.br INTRODUÇÃO: Embreagens são elementos que
Universidade Federal do Paraná Curso de Engenharia Industrial Madeireira ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102 Dr. Alan Sulato de Andrade alansulato@ufpr.br INTRODUÇÃO: Embreagens são elementos que
AULAS 03-04 UNIDADE 1 DINÂMICA DE MÁQUINAS ELÉTRICAS (DME) Prof. Ademir Nied ademir.nied@udesc.br
 Prof. Ademir Nied ademir.nied@udesc.br") Universidade do Estado de Santa Catarina Departamento de Engenharia Elétrica Curso de Pós-Graduação em Engenharia Elétrica AULAS 03-04 UNIDADE 1 DINÂMICA DE MÁQUINAS ELÉTRICAS (DME) Prof. Ademir Nied ademir.nied@udesc.br
Universidade do Estado de Santa Catarina Departamento de Engenharia Elétrica Curso de Pós-Graduação em Engenharia Elétrica AULAS 03-04 UNIDADE 1 DINÂMICA DE MÁQUINAS ELÉTRICAS (DME) Prof. Ademir Nied ademir.nied@udesc.br
Coldex Tosi Ar Condicionado
 Coldex Tosi Ar Condicionado Condicionadores de Ar Self Contained 5 a 40 TR tipo ROOF-TOP ESPECIFICAÇÕES A linha SELF CONTAINED TOSI foi projetada visando obter a melhor relação custo-beneficio do mercado,
Coldex Tosi Ar Condicionado Condicionadores de Ar Self Contained 5 a 40 TR tipo ROOF-TOP ESPECIFICAÇÕES A linha SELF CONTAINED TOSI foi projetada visando obter a melhor relação custo-beneficio do mercado,
EPS 617 Bancada de teste Diesel Eficiência e versatilidade
 EPS 617 Bancada de teste Diesel Eficiência e versatilidade Características e vantagens da bancada EPS 617 Acessórios necessários para o uso da bancada. A nova bancada de teste Diesel Bosch EPS 617 apresenta
EPS 617 Bancada de teste Diesel Eficiência e versatilidade Características e vantagens da bancada EPS 617 Acessórios necessários para o uso da bancada. A nova bancada de teste Diesel Bosch EPS 617 apresenta
1 ATUADORES HIDRÁULICOS
 1 ATUADORES HIDRÁULICOS Danniela Rosa Sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Aliás, o motor elétrico também é um tipo de atuador.
1 ATUADORES HIDRÁULICOS Danniela Rosa Sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Aliás, o motor elétrico também é um tipo de atuador.
S O IC N Â C E etro) M O TR C (taquím LE E S étrico TO N E M A o taquim C C V o Transdutores Transdutores de velocidade: dínam E E T D IP
 M O TR C (taquím LE E S étrico TO N E M A o taquim C C V o Transdutores Transdutores de velocidade: dínam E E T D IP") Accionamentos Electromecânicos / Selecção de Conversores Carlos Ferreira 1 Para fechar a malha é necessária a utilização de transdutores das variáveis. Conforme a grandeza a controlar assim é o transdutor
Accionamentos Electromecânicos / Selecção de Conversores Carlos Ferreira 1 Para fechar a malha é necessária a utilização de transdutores das variáveis. Conforme a grandeza a controlar assim é o transdutor
Engrenagens cilíndricas de dentes retos. Alan Christie da Silva Dantas
 Engrenagens cilíndricas de dentes retos Alan Christie da Silva Dantas Motivação Extensamente usadas para transmissão de movimento em maquinas industriais; Rotativo rotativo; Rotativo linear. Caixas de
Engrenagens cilíndricas de dentes retos Alan Christie da Silva Dantas Motivação Extensamente usadas para transmissão de movimento em maquinas industriais; Rotativo rotativo; Rotativo linear. Caixas de
ALB200 ALB250 BALANCEADORA DE RODAS BALANCEADORA DE RODAS MOTORIZADA SISTEMA COLUNA BALANCEADORA DE RODAS MOTORIZADA SISTEMA COLUNA.
 BALANCEADORA DE RODAS ALB250 BALANCEADORA DE RODAS MOTORIZADA SISTEMA COLUNA Equipamento de balanceamento computadorizado com leitura digital para captação do desequilibrio de peso do conjunto pneu/roda.
BALANCEADORA DE RODAS ALB250 BALANCEADORA DE RODAS MOTORIZADA SISTEMA COLUNA Equipamento de balanceamento computadorizado com leitura digital para captação do desequilibrio de peso do conjunto pneu/roda.
Vazão. 7.1 Introdução
 Cap. 7 Medição de 7.1 Introdução Vazão Existem diversos tipos de medidores de vazão de escoamento, sendo que a escolha de um tipo dependerá das condições necessárias ao sistema, como por exemplo, a faixa
Cap. 7 Medição de 7.1 Introdução Vazão Existem diversos tipos de medidores de vazão de escoamento, sendo que a escolha de um tipo dependerá das condições necessárias ao sistema, como por exemplo, a faixa
Enroladores de Cabos - Contrapeso. Sistemas de Recuperação
 Enroladores de Cabos - Contrapeso Sistemas de Recuperação As figuras acima ilustram os tipos de acionamento a contrapeso. Na figura 7a temos o acionamento direto, na 7b, o acionamento direto através de
Enroladores de Cabos - Contrapeso Sistemas de Recuperação As figuras acima ilustram os tipos de acionamento a contrapeso. Na figura 7a temos o acionamento direto, na 7b, o acionamento direto através de
Tecnologia de Comando Numérico 164399
 164399 Aula 2 Introdução à Automação da Manufatura Mecatrônica; Automação; Níveis de Automação; Tipos de Automação; Justificativas para automatizar; Justificativas para não automatizar; Prof. Edson Paulo
164399 Aula 2 Introdução à Automação da Manufatura Mecatrônica; Automação; Níveis de Automação; Tipos de Automação; Justificativas para automatizar; Justificativas para não automatizar; Prof. Edson Paulo
Acionamento de Motores CA
 Fundação Universidade Federal ACIONAMENTOS de Mato Grosso do CA Sul 1 Acionamentos Eletrônicos de Motores Acionamento de Motores CA Prof. Márcio Kimpara Prof. João Onofre. P. Pinto Universidade Federal
Fundação Universidade Federal ACIONAMENTOS de Mato Grosso do CA Sul 1 Acionamentos Eletrônicos de Motores Acionamento de Motores CA Prof. Márcio Kimpara Prof. João Onofre. P. Pinto Universidade Federal
UFPR TOLERÂNCIAS GEOMÉTRICAS PROF. ALESSANDRO MARQUES. Especificações Geométricas de Produto. Geometrical Product Specifications (GPS)
") UFPR METROLOGIA MECÂNICA DIMENSIONAL Especificações Geométricas de Produto Geometrical Product Specifications (GPS) TOLERÂNCIAS GEOMÉTRICAS PROF. ALESSANDRO MARQUES Tolerâncias geométricas As peças ao
UFPR METROLOGIA MECÂNICA DIMENSIONAL Especificações Geométricas de Produto Geometrical Product Specifications (GPS) TOLERÂNCIAS GEOMÉTRICAS PROF. ALESSANDRO MARQUES Tolerâncias geométricas As peças ao
Resistência dos Materiais
 Aula 6 Estudo de Torção, Transmissão de Potência e Torque Aula 6 Definição de Torque Torque é o momento que tende a torcer a peça em torno de seu eixo longitudinal. Seu efeito é de interesse principal
Aula 6 Estudo de Torção, Transmissão de Potência e Torque Aula 6 Definição de Torque Torque é o momento que tende a torcer a peça em torno de seu eixo longitudinal. Seu efeito é de interesse principal
USO, MANUTENÇÃO E REGULAGEM DE CASSETES PARA ÁREA DE TREFILAÇÃO
 USO, MANUTENÇÃO E REGULAGEM DE CASSETES PARA ÁREA DE TREFILAÇÃO Cassetes Os cassetes laminadores são micro cadeiras de laminação, que substituem as fieiras nas máquinas de trefilação. Seu surgimento no
USO, MANUTENÇÃO E REGULAGEM DE CASSETES PARA ÁREA DE TREFILAÇÃO Cassetes Os cassetes laminadores são micro cadeiras de laminação, que substituem as fieiras nas máquinas de trefilação. Seu surgimento no
6. CILINDROS PNEUMÁTICOS
 6. CILINDROS PNEUMÁTICOS Os cilindros, também conhecidos como atuadores lineares, são elementos pneumáticos de trabalho os quais transformam a energia proveniente do ar comprimido em energia mecânica,
6. CILINDROS PNEUMÁTICOS Os cilindros, também conhecidos como atuadores lineares, são elementos pneumáticos de trabalho os quais transformam a energia proveniente do ar comprimido em energia mecânica,
Hidráulica móbil aplicada a máquina agrícolas 1. 1. Bombas e Motores
 Hidráulica móbil aplicada a máquina agrícolas 1 BOMBAS: 1. Bombas e Motores As bombas hidráulicas são o coração do sistema, sua principal função é converter energia mecânica em hidráulica. São alimentadas
Hidráulica móbil aplicada a máquina agrícolas 1 BOMBAS: 1. Bombas e Motores As bombas hidráulicas são o coração do sistema, sua principal função é converter energia mecânica em hidráulica. São alimentadas
Controle de Velocidade de Motores de Corrente Contínua
 Controle de Velocidade de Motores de Corrente Contínua Há várias maneiras para se controlar a velocidade de motores de corrente contínua. A modulação por largura de pulso ( PWM pulse width modulation )
Controle de Velocidade de Motores de Corrente Contínua Há várias maneiras para se controlar a velocidade de motores de corrente contínua. A modulação por largura de pulso ( PWM pulse width modulation )
GKN Driveline. Eixos de transmissão GKN Driveline
 Eixos de transmissão GKN Driveline A GKN Driveline é a fornecedora líder mundial de componentes e sistemas de sistema de transmissão automotivos. Nossa liderança de mercado global é baseada em uma forte
Eixos de transmissão GKN Driveline A GKN Driveline é a fornecedora líder mundial de componentes e sistemas de sistema de transmissão automotivos. Nossa liderança de mercado global é baseada em uma forte
EMENTÁRIO. Princípios de Conservação de Alimentos 6(4-2) I e II. MBI130 e TAL472*.
 I e II. MBI130 e TAL472*.") EMENTÁRIO As disciplinas ministradas pela Universidade Federal de Viçosa são identificadas por um código composto por três letras maiúsculas, referentes a cada Departamento, seguidas de um número de três
EMENTÁRIO As disciplinas ministradas pela Universidade Federal de Viçosa são identificadas por um código composto por três letras maiúsculas, referentes a cada Departamento, seguidas de um número de três
CONHECIMENTO ESPECÍFICO
 CONHECIMENTO ESPECÍFICO 6. O PID (Proporcional Integral Derivativo) é comumente usado na automação industrial para se encontrar um erro entre a entrada e a saída de um processo qualquer. Nesse processo,
CONHECIMENTO ESPECÍFICO 6. O PID (Proporcional Integral Derivativo) é comumente usado na automação industrial para se encontrar um erro entre a entrada e a saída de um processo qualquer. Nesse processo,
UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO Objetivos da Aula Diferenciar automação da mecanização. Posicionar a automação industrial no contexto histórico. Classificar os tipos
UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO Objetivos da Aula Diferenciar automação da mecanização. Posicionar a automação industrial no contexto histórico. Classificar os tipos
Escola de Educação Profissional SENAI Visconde de Mauá
 Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Novembro de 2014 Revisão: A Prof Vander Campos Conhecer os principais conceitos e aplicações dos Servoacionamentos;
Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Novembro de 2014 Revisão: A Prof Vander Campos Conhecer os principais conceitos e aplicações dos Servoacionamentos;
Sensores e Atuadores (1)
") (1) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Introdução Sensores Fornecem parâmetros sobre o comportamento do manipulador, geralmente em termos de posição e velocidade
(1) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Introdução Sensores Fornecem parâmetros sobre o comportamento do manipulador, geralmente em termos de posição e velocidade
6 Conclusões e sugestões para trabalhos futuros
 6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
Técnico/a de Refrigeração e Climatização
 Técnico/a de Refrigeração e Climatização 1315 Eletricidade e eletrónica - programação de autómatos 2013/ 2014 Gamboa 1 Introdução Automação, estudo dos métodos e procedimentos que permitem a substituição
Técnico/a de Refrigeração e Climatização 1315 Eletricidade e eletrónica - programação de autómatos 2013/ 2014 Gamboa 1 Introdução Automação, estudo dos métodos e procedimentos que permitem a substituição
Exemplos de seleção de fuso de esferas
 Diagrama de seleção Equipamentos de transferência de alta velocidade (uso horizontal) Condições de seleção Massa da mesa m 1 = 60 kg Massa de trabalho m 2 = 20 kg Comprimento do curso l S = 1000 mm Velocidade
Diagrama de seleção Equipamentos de transferência de alta velocidade (uso horizontal) Condições de seleção Massa da mesa m 1 = 60 kg Massa de trabalho m 2 = 20 kg Comprimento do curso l S = 1000 mm Velocidade
Capítulo 8 - MOTORES ELÉTRICOS
 Capítulo 8 - MOTORES ELÉTRICOS 8.1 - Motores de Corrente Contínua 8.2 - Motores de Corrente Alternada 8.3 - Motores Especiais 8.4 - Exercícios Propostos Na natureza a energia se encontra distribuída sob
Capítulo 8 - MOTORES ELÉTRICOS 8.1 - Motores de Corrente Contínua 8.2 - Motores de Corrente Alternada 8.3 - Motores Especiais 8.4 - Exercícios Propostos Na natureza a energia se encontra distribuída sob
Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um
 e transmitem um sinal para um") Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de medição ou controle. 1 Cite 05 tipos
Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de medição ou controle. 1 Cite 05 tipos
Na Placa de Comando estão montados os circuitos para partida direta, partida direta com reversão e partida estrelatriângulo;
 1) BANCADA PRINCIPAL MODELO POL-110 Fabricada em estrutura de alumínio, constituída por dois postos de trabalho que servirão de base para utilização de qualquer um dos kits didáticos a serem adquiridos.
1) BANCADA PRINCIPAL MODELO POL-110 Fabricada em estrutura de alumínio, constituída por dois postos de trabalho que servirão de base para utilização de qualquer um dos kits didáticos a serem adquiridos.
MF 86 HS. Retroescavadeira / Pá carregadeira MASSEY FERGUSON
 MF 86 HS Retroescavadeira / Pá carregadeira MASSEY FERGUSON 2 www.massey.com.br 4 tipos de versões e o maior número de vantagens Alavanca de múltipla ação no carregador frontal Plataforma para o operador
MF 86 HS Retroescavadeira / Pá carregadeira MASSEY FERGUSON 2 www.massey.com.br 4 tipos de versões e o maior número de vantagens Alavanca de múltipla ação no carregador frontal Plataforma para o operador
DIRETORIA DE EDUCAÇÃO E TECNOLOGIA COORDENAÇÃO DO CURSO DE ELETROTÉCNICA. Disciplina: Máquinas e Automação Elétrica. Prof.
 DIRETORIA DE EDUCAÇÃO E TECNOLOGIA COORDENAÇÃO DO CURSO DE ELETROTÉCNICA Disciplina: Máquinas e Automação Elétrica Prof.: Hélio Henrique INTRODUÇÃO IFRN - Campus Mossoró 2 MOTORES TRIFÁSICOS CA Os motores
DIRETORIA DE EDUCAÇÃO E TECNOLOGIA COORDENAÇÃO DO CURSO DE ELETROTÉCNICA Disciplina: Máquinas e Automação Elétrica Prof.: Hélio Henrique INTRODUÇÃO IFRN - Campus Mossoró 2 MOTORES TRIFÁSICOS CA Os motores
Kit de Máquinas Elétricas Rotativas - XE801 -
 T e c n o l o g i a Kit de Máquinas Elétricas Rotativas - XE801 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. INTRODUÇÃO Kit de Máquinas Elétricas Rotativas -
T e c n o l o g i a Kit de Máquinas Elétricas Rotativas - XE801 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. INTRODUÇÃO Kit de Máquinas Elétricas Rotativas -
Servoconversores SCA 04 Servomotores SWA
 Servoconversores SCA 04 Servomotores SWA Os Servoacionamentos WEG são utilizados nas mais diversas aplicações industriais, onde, elevada dinâmica, controle de torque, precisão de velocidade e posicionamento
Servoconversores SCA 04 Servomotores SWA Os Servoacionamentos WEG são utilizados nas mais diversas aplicações industriais, onde, elevada dinâmica, controle de torque, precisão de velocidade e posicionamento
MANCAIS DE ROLAMENTOS. 1. Introdução 2- Classificação. 3. Designação de rolamentos. 4. Defeitos comuns dos rolamentos. 5. Critérios de seleção.
 MANCAIS DE ROLAMENTOS. 1. Introdução 2- Classificação. 3. Designação de rolamentos. 4. Defeitos comuns dos rolamentos. 5. Critérios de seleção. Os mancais em geral têm como finalidade servir de apóio às
MANCAIS DE ROLAMENTOS. 1. Introdução 2- Classificação. 3. Designação de rolamentos. 4. Defeitos comuns dos rolamentos. 5. Critérios de seleção. Os mancais em geral têm como finalidade servir de apóio às
BOMBEAMENTO DE ÁGUA COM ENERGIA SOLAR FOTOVOLTAICA
 BOMBEAMENTO DE ÁGUA COM ENERGIA SOLAR FOTOVOLTAICA Eng. Carlos Alberto Alvarenga Solenerg Engenharia e Comércio Ltda. Rua dos Inconfidentes, 1075/ 502 Funcionários - CEP: 30.140-120 - Belo Horizonte -
BOMBEAMENTO DE ÁGUA COM ENERGIA SOLAR FOTOVOLTAICA Eng. Carlos Alberto Alvarenga Solenerg Engenharia e Comércio Ltda. Rua dos Inconfidentes, 1075/ 502 Funcionários - CEP: 30.140-120 - Belo Horizonte -
Tecnologia em equilíbrio entre força e movimento
 Tecnologia em equilíbrio entre força e movimento Parker Hannifin A Parker é a líder global na fabricação de componentes destinados aos mercados de movimento e controle do movimento, dedicada a oferecer
Tecnologia em equilíbrio entre força e movimento Parker Hannifin A Parker é a líder global na fabricação de componentes destinados aos mercados de movimento e controle do movimento, dedicada a oferecer
UNIÕES DE ACOPLAMENTO
 UNIÕES DE ACOPLAMENTO Cat 012 - Out 2015 1 / 11 "GIFLEX" GE-T A aplicação industrial de acoplamentos elásticos tem por objectivo absorver ou atenuar eventuais irregularidades de rotação originadas pelo
UNIÕES DE ACOPLAMENTO Cat 012 - Out 2015 1 / 11 "GIFLEX" GE-T A aplicação industrial de acoplamentos elásticos tem por objectivo absorver ou atenuar eventuais irregularidades de rotação originadas pelo
1º WORKSHOP SOBRE VEÍCULO ELÉTRICO HÍBRIDO NO BRASIL
 1º WORKSHOP SOBRE VEÍCULO ELÉTRICO HÍBRIDO NO BRASIL 15 de Abril de 2003 São Paulo, SP Organizado pelo INEE VEÍCULO ELÉTRICO HÍBRIDO (VEH) O Veículo Elétrico Híbrido (VEH) usa duas ou mais fontes de potência.
1º WORKSHOP SOBRE VEÍCULO ELÉTRICO HÍBRIDO NO BRASIL 15 de Abril de 2003 São Paulo, SP Organizado pelo INEE VEÍCULO ELÉTRICO HÍBRIDO (VEH) O Veículo Elétrico Híbrido (VEH) usa duas ou mais fontes de potência.
ACOPLAMENTO ELÁSTICO MADEFLEX MN
 CARACTERÍSTICAS TÉCNICAS Os acoplamentos são compostos por dois cubos simétricos de ferro fundido cinzento, e um elemento elástico alojado entre eles, de borracha sintética de elevada resistência a abrasão.
CARACTERÍSTICAS TÉCNICAS Os acoplamentos são compostos por dois cubos simétricos de ferro fundido cinzento, e um elemento elástico alojado entre eles, de borracha sintética de elevada resistência a abrasão.
Considerações sobre redimensionamento de motores elétricos de indução
 Considerações sobre redimensionamento de motores elétricos de indução Artigo publicado na revista Lumiere Electric edição nº 166 Aplicações de investimentos dentro das empresas sempre são questionadas
Considerações sobre redimensionamento de motores elétricos de indução Artigo publicado na revista Lumiere Electric edição nº 166 Aplicações de investimentos dentro das empresas sempre são questionadas
O que é automação? SENAI / RJ. Julho / 2011
 O que é automação? SENAI / RJ Julho / 2011 O que é automação? Automação industrial é o uso de qualquer dispositivo mecânico ou eletro-eletrônico para controlar máquinas e processos. Entre os dispositivos
O que é automação? SENAI / RJ Julho / 2011 O que é automação? Automação industrial é o uso de qualquer dispositivo mecânico ou eletro-eletrônico para controlar máquinas e processos. Entre os dispositivos
COMPRESSORES. Ruy Alexandre Generoso
 COMPRESSORES Ruy Alexandre Generoso É o componente básico de qualquer sistema pneumático. O ar é comprimido em um sistema pneumático, de forma que possa ser usado para puxar, empurrar, realizar trabalho
COMPRESSORES Ruy Alexandre Generoso É o componente básico de qualquer sistema pneumático. O ar é comprimido em um sistema pneumático, de forma que possa ser usado para puxar, empurrar, realizar trabalho
VII CONGRESO BOLIVARIANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre del 2012
 VII CONGRESO BOLIVARIANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre del 2012 DESEMPENHO DE SERVO MOTORES LINEARES EM POSICIONADORES DE PRECISÃO SUBMICROMÉTICA Gilva Altair Rossi de Jesus 1, José
VII CONGRESO BOLIVARIANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre del 2012 DESEMPENHO DE SERVO MOTORES LINEARES EM POSICIONADORES DE PRECISÃO SUBMICROMÉTICA Gilva Altair Rossi de Jesus 1, José
INTRODUÇÃO À ROBÓTICA
 Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Aula V Medição de Variáveis Mecânicas
 Aula V Medição de Variáveis Mecânicas Universidade Federal da Bahia Escola Politécnica Disciplina: Instrumentação e Automação Industrial I(ENGF99) Professor: Eduardo Simas(eduardo.simas@ufba.br) Sensores
Aula V Medição de Variáveis Mecânicas Universidade Federal da Bahia Escola Politécnica Disciplina: Instrumentação e Automação Industrial I(ENGF99) Professor: Eduardo Simas(eduardo.simas@ufba.br) Sensores
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO. Projeto Conceitual de um Robô SCARA
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO Projeto Conceitual de um Robô SCARA Disciplina de Projetos I (CCA 99002) Prof.Dr. Rafael Antônio Comparsi
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO Projeto Conceitual de um Robô SCARA Disciplina de Projetos I (CCA 99002) Prof.Dr. Rafael Antônio Comparsi
SENSORES INDUSTRIAIS
 SENSORES INDUSTRIAIS Sensores: são dispositivos que transformam grandezas físicas em um sinal Sensores Analógicos e Digitais Caracterís:cas Alcance Precisão Resolução Sensibilidade Tempo de Resposta Não
SENSORES INDUSTRIAIS Sensores: são dispositivos que transformam grandezas físicas em um sinal Sensores Analógicos e Digitais Caracterís:cas Alcance Precisão Resolução Sensibilidade Tempo de Resposta Não
Intelligent Drivesystems, Worldwide Services. Redutores industriais para transportadores de correia e elevadores de canecas DRIVESYSTEMS
 Intelligent Drivesystems, Worldwide Services BR PT Redutores industriais para transportadores de correia e elevadores de canecas NORD Intelligent Drivesystems, Worldwide Services Parceiros em movimento
Intelligent Drivesystems, Worldwide Services BR PT Redutores industriais para transportadores de correia e elevadores de canecas NORD Intelligent Drivesystems, Worldwide Services Parceiros em movimento
ACOPLAMENTOS ELÁSTICOS MADEFLEX GR (COM GARRAS)
") ACOPLAMENTOS ELÁSTICOS MADEFLEX GR (COM GARRAS) CARACTERÍSTICAS TÉCNICAS Os acoplamentos MADEFLEX GR são compostos por dois cubos simétricos de ferro fundido cinzento, e um elemento elástico alojado entre
ACOPLAMENTOS ELÁSTICOS MADEFLEX GR (COM GARRAS) CARACTERÍSTICAS TÉCNICAS Os acoplamentos MADEFLEX GR são compostos por dois cubos simétricos de ferro fundido cinzento, e um elemento elástico alojado entre
PdP. Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/05/2006 Última versão: 18/12/2006
 TUTORIAL Montagem da Barra de LEDs Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/05/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Montagem da Barra de LEDs Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/05/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
Correntes. Os problemas de uma empresa da área de. Conceito
 A U A UL LA Correntes Introdução Os problemas de uma empresa da área de transporte e cargas fez com que o encarregado do setor tomasse algumas decisões referentes à substituição de equipamentos, como componentes
A U A UL LA Correntes Introdução Os problemas de uma empresa da área de transporte e cargas fez com que o encarregado do setor tomasse algumas decisões referentes à substituição de equipamentos, como componentes
Acoplamento Altamente Elástico
 Acoplamento Altamente Elástico Spxpt 04/02 GENERALIDADES Acoplamentos altamente elásticos Speflex modelos SPA e SPG O acoplamento VULKAN SPEFLEX é constituído de um elemento altamente elástico em borracha
Acoplamento Altamente Elástico Spxpt 04/02 GENERALIDADES Acoplamentos altamente elásticos Speflex modelos SPA e SPG O acoplamento VULKAN SPEFLEX é constituído de um elemento altamente elástico em borracha
ACOPLAMENTOS ELÁSTICOS MADEFLEX MSN
 ACOPLAMENTOS ELÁSTICOS MADEFLEX MSN CARACTERÍSTICAS TÉCNICAS Os acoplamentos MADEFLEX MSN são compostos por dois cubos simétricos de ferro fundido nodular, e um elemento poliuretano alojado entre eles
ACOPLAMENTOS ELÁSTICOS MADEFLEX MSN CARACTERÍSTICAS TÉCNICAS Os acoplamentos MADEFLEX MSN são compostos por dois cubos simétricos de ferro fundido nodular, e um elemento poliuretano alojado entre eles
CONVERSOR DE TORQUE PRINCIPIO DE FUNCIONAMENTO
 CONVERSOR DE TORQUE PRINCIPIO DE FUNCIONAMENTO Em matérias anteriores, conhecemos algumas noções básicas do funcionamento de uma transmissão automática, com seus componentes principais, informando ao técnico
CONVERSOR DE TORQUE PRINCIPIO DE FUNCIONAMENTO Em matérias anteriores, conhecemos algumas noções básicas do funcionamento de uma transmissão automática, com seus componentes principais, informando ao técnico
CENTROS DE USINAGEM VERTICAL
 CENTROS DE USINAGEM VERTICAL DV DM EIXO ÁRVORE 12000-15000 rpm 24000 rpm DESLOCAMENTO RÁPIDO DO EIXO X, Y DESLOCAMENTO RÁPIDO DO EIXO Z TEMPO DE TROCA DE FERRAMENTAS 36m/min. 24m/min. 1,5 seg. Centros
CENTROS DE USINAGEM VERTICAL DV DM EIXO ÁRVORE 12000-15000 rpm 24000 rpm DESLOCAMENTO RÁPIDO DO EIXO X, Y DESLOCAMENTO RÁPIDO DO EIXO Z TEMPO DE TROCA DE FERRAMENTAS 36m/min. 24m/min. 1,5 seg. Centros
B58 - ENCODER INCREMENTAL
 B58 ENCODER INCREMENTAL Encoder padrão europeu para aplicação industrial Até 2.540 pulsos por rotação Sinal de alta precisão Fácil Instalação Temperatura de operação até 80º C Diversas opções de circuito
B58 ENCODER INCREMENTAL Encoder padrão europeu para aplicação industrial Até 2.540 pulsos por rotação Sinal de alta precisão Fácil Instalação Temperatura de operação até 80º C Diversas opções de circuito
Vista Geral de Produto. Motores de cilindro axial Interroll Acionamento, eficiente em termos energéticos, para transporte de mercadoria em volumes
 Vista Geral de Produto Motores de cilindro axial Interroll Acionamento, eficiente em termos energéticos, para transporte de mercadoria em volumes Assíncronos: Série S Série i Motores de cilindro axial
Vista Geral de Produto Motores de cilindro axial Interroll Acionamento, eficiente em termos energéticos, para transporte de mercadoria em volumes Assíncronos: Série S Série i Motores de cilindro axial
Concreto e Agregados CATÁLOGO DE PRODUTOS. Pág. 1. Seção C
 I-3001 PRENSA HIDRÁULICA MANUAL 100T COM 1 MANÔMETRO NBR NM-ISO 7500-1; NBR 12767, 7680, 5739; DNER-ME091; MN 101 PALAVRA-CHAVE: Prensa, Corpos de Prova, compressão, tração, flexão, diametral Prensa manual
I-3001 PRENSA HIDRÁULICA MANUAL 100T COM 1 MANÔMETRO NBR NM-ISO 7500-1; NBR 12767, 7680, 5739; DNER-ME091; MN 101 PALAVRA-CHAVE: Prensa, Corpos de Prova, compressão, tração, flexão, diametral Prensa manual
FUNCIONAMENTO DO SISTEMA DE TRANSMISSÃO:
 FUNCIONAMENTO DO SISTEMA DE TRANSMISSÃO: 1 - EMBREAGEM 2 - CÂMBIO 3 - DIFERENCIAL 4 - REDUÇÃO FINAL Luiz Atilio Padovan Prof. Eng. Agrônomo 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO
FUNCIONAMENTO DO SISTEMA DE TRANSMISSÃO: 1 - EMBREAGEM 2 - CÂMBIO 3 - DIFERENCIAL 4 - REDUÇÃO FINAL Luiz Atilio Padovan Prof. Eng. Agrônomo 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO
SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÃO ELETRÔNICA PROFESSOR: LUCIANO CAVALCANTI SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÃO ELETRÔNICA PROFESSOR: LUCIANO CAVALCANTI SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
correas UNIPLY Funcionamento das Correias Elevadoras Componentes de um Elevador de Correias a Canecas Referências:
 Funcionamento das Correias Elevadoras Componentes de um Elevador de Correias a Canecas Os elevadores de correias a caçambas são os equipamentos mais comuns e econômicos para o movimento vertical de materiais
Funcionamento das Correias Elevadoras Componentes de um Elevador de Correias a Canecas Os elevadores de correias a caçambas são os equipamentos mais comuns e econômicos para o movimento vertical de materiais
PERFIL DO TÉCNICO REPARADOR DE TRANSMISSÕES AUTOMÁTICAS. Competências necessárias ao técnico para o desempenho de suas funções.
 PERFIL DO TÉCNICO REPARADOR DE TRANSMISSÕES AUTOMÁTICAS Competências necessárias ao técnico para o desempenho de suas funções. Primeiro grupo Introdução às transmissões automáticas. 1. Corrigir declarações
PERFIL DO TÉCNICO REPARADOR DE TRANSMISSÕES AUTOMÁTICAS Competências necessárias ao técnico para o desempenho de suas funções. Primeiro grupo Introdução às transmissões automáticas. 1. Corrigir declarações