Quádricas e superfícies
|
|
|
- Rafaela Frade Meneses
- 5 Há anos
- Visualizações:
Transcrição
1 Capítulo 6 Quádricas e superfícies Como as curvas, as superfícies também podem ser apresentadas formas distintas: na forma paramétrica, ou como gráfico de funções de variáveis ou através de equações a 3 variáveis. A maioria das chamadas quádricas formam os primeiros eemplos de superfícies, além dos já conhecidos planos e esferas. Algumas destas superfícies são superfícies ciĺındricas (reunião de retas paralelas retas geratrizes, cada uma passando por um ponto de uma curva diretriz), cones sobre curvas (reunião de retas retas geratrizes que passam por um ponto de uma curva diretriz e por um ponto fio, chamado vértice do cone), ou superfícies de revolução (obtidas girando uma curva diretriz em torno de um eio fio). Tanto cilindros como cones são regrados (reunião de retas), mas eistem outras superfícies não tão óbvias mas regradas, inclusive entre as quádricas. Vamos apresentar inicialmente as quádricas na sua forma mais simples, com equação reduzida. 3
2 3 6. Introdução às Quádricas Como as cônicas do plano, que podiam ser descritas no sistema cartesiano por equações polinomiais de grau em duas variáveis, as quádricas no espaço são aquelas que podem ser representadas por equações polinomiais de grau em 3 variáveis. p(,, z) = a +a a 33 z +a +a 3 z+a 3 z+a +a +a 3 z+a = Como nas cônicas, os termos mistos (a + a 3 z + a 3 z) representam que os eios e planos de simetria estão rotacionados em relação aos eios e planos coordenados. Também como nas cônicas, o ponto de simetria (centro da quádrica) na origem deia a equação sem termos lineares (a + a + a 3 z). Assim como nas cônicas, eistem quádricas sem centro (parabolóides) que nunca ficam sem todos os termos lineares. a a a 3 a a Também temos a matriz da quádrica, simétrica, A = a a 3 a e a matriz a 3 a 3 a 33 a 3 a a a 3 a a a a 3 da forma quadrática Q = a a a 3 a 3 a 3 a 33 Em geral, uma quádrica é uma superfície. Mas há degenerações como vazio, ponto e reta. As secções planas de uma quádrica são cônicas. Já vimos o eemplo clássico das secções do cone, gerando as cônicas. Vamos inicialmente apresentar as quádricas com centro na origem, e sem rotação dos eios e planos de simetria. Os eios de simetria são as intersecções dos planos de simetria.
3 6. Quádricas e suas equações, na forma reduzida. Apresentamos inicialmente as quádricas com centro (,, ) (sem termos lineares na equação reduzida):. Elipsóide a + b + z c = Observe que as secções pelos planos coordenados =, = e z = são elipses: Para =, temos no plano coordenado Oz a elipse b + z c =. Para =, temos no plano coordenado Oz a elipse a + z c =. Para z =, temos no plano coordenado O a elipse z 3 3 z 3 3 z 3 a + b =. z Elipsóide z 9 = e suas metades, mostrando as secções Os 3 planos coordenados são planos de simetria, a origem é ponto de simetria. Observe que se a = b, o elipsóide é uma superfície de revolução em torno do eio Oz, se a = c, em torno do eio O e se b = c, em torno do eio O.. Hiperbolóide de uma folha a + b z c = Para =, temos no plano coordenado Oz a hipérbole b z c =. Para =, temos no plano coordenado Oz a hipérbole a z c =. Para z =, temos no plano coordenado O a elipse a + b =. 3 z z 3 3 z 3 z 3 Hiperbolóide de uma folha + z 9 = e suas metades, mostrando as secções
4 33 Como eercício, estude os hiperbolóides a b + z c = e a + b + z c =. O que muda? Em que situação o hiperbolóide é superfície de revolução? Em torno de que eio? Um modelo concreto de hiperbolóide de uma folha é o clássico cesto de lio, construído com varetas retas colocadas num fundo circular, com inclinação constante. Os hiperbolóides de uma folha são superfícies regradas, apesar de não serem cilindros, nem cones. 3. Hiperbolóide de duas folhas a b z c = Para =, temos a cônica vazia (o hiperbolóide não passa pelo plano Oz). Para =, temos no plano coordenado Oz a hipérbole a z c =. Para z =, temos no plano coordenado O a hipérbole a b =. z z z Hiperbolóide de duas folhas 9/ z = e suas metades, mostrando as secções Como eercício, estude os hiperbolóides a b + z c = e a + b z c =. O que muda? Em que situação o hiperbolóide é superfície de revolução? Em torno de que eio?. Cone a + b z c =. Para = e para =, duas retas concorrentes b z c = e a z c =, respectivamente. Para z =, um ponto.
5 Cone + z = e suas partes Secções: retas concorrentes, hipérbole e parábola Como eercício, estude os cones a + b + z c = e a b + z c =. O que muda? Em que situação o cone é superfície de revolução? Em torno de que eio? Qual a curva diretriz? 5. Cilindro eĺıtico a + b =. Como z não aparece na equação, é livre. Assim, a figura é um cilindro com retas geratrizes paralelas ao eio Oz, baseadas na curva diretriz dada pela secção z =, que é uma elipse. Esta quádrica também pode ser uma superfície de revolução em alguns casos. Descreva estes casos. 6. Cilindro hiperbólico a b =. Neste caso, a curva diretriz é a hipérbole dada no plano O pela equação. Veja os dois cilindros, na figura abaio: 3 3 z z.5.5
6 35 7. Par de planos concorrentes a b =. 8. Par de planos paralelos a = 9. Um plano a =. Uma reta a + b =.. Um ponto a + b + z c =.. Conjunto vazio ( ): a + b + z c = ou a + b = ou a = Tanto o plano, como os planos concorrentes ou paralelos são superfícies regradas, e ciĺındricas. Agora, as quádricas sem centro, muito importantes para Cálculo Diferencial de duas variáveis. Podemos sempre reduzir a parte linear a apenas um componente, por eemplo z, e a quádrica pode ser encarada como gáfico de função de duas variáveis z = f(, ). Neste estudo, é interessante conhecer além das intersecções com os planos coordenados, também as suas secções por planos z = k, obtendo as chamadas curvas de nível k representadas no plano O.. Parabolóide eĺıtico z = a + b. Para = temos a parábola no plano Oz; para =, a parábola no plano Oz Para z =, temos um ponto; para z = k < temos a cônica vazia; para z = k >
7 36 temos elipses e, em particular, para z =, a elipse a + b = , curvas de nível no plano O corte no nível k = As ilustrações acima são do parabolóide z = +, seus cortes, seus níveis z = k >. Este parabolóide também pode ser uma superfície de revolução em torno do eio Oz, se a = b. Estes são os modelos de antenas parabólicas, por eemplo.. Parabolóide hiperbólico (sela) z = a b. Para = temos a parábola no plano Oz; para =, a parábola no plano Oz...8 Para z =, temos um par de retas concorrentes; para z = k < temos hipérboles; para z = k > temos outras hipérboles, todas com as mesmas assíntotas dadas pelo nível z =. Veja estas secções na próima figura:
8 37.5 Curvas com z = k curvas de nível corte no nível k =.5 sobre a sela no plano O Parabolóides hiperbólicos são também superfícies regradas. 3. Cilindro parabólico z = a. Para = é uma parábola, sua curva diretriz. As retas geratrizes são paralelas ao eio O, já que não aparece na equação (é livre!). Veja os níveis z = k e a representação das curvas de nível no plano O: Podemos obter casos análogos de quádricas sem centro na forma reduzida, gráficos de funções = f(, z) e = f(, z). Para se reconhecer graficamente uma quádrica, e superfícies em geral, utiliza-se obter suas secções pelos planos coordenados e por alguns planos paralelos a estes como z = k gerando curvas de nível, e de posse destas secções, faz-se a análise das possibilidades. Os eemplos de secções cônicas e quádricas na forma reduzida precisam ser memorizados, como as letras de um alfabeto, pois são os primeiros modelos para várias situações, como no estudo de pontos de máimo, mínimo e sela de funções de e 3 variáveis, a ser vista no Cálculo Diferencial de Várias Variáveis.
9 38 Nos casos de quádricas reduzidas acima, vimos que as que são ciĺındricas aparecem com geratrizes paralelas ao eio da variável que não comparece na equação. A diretriz é a cônica descrita pelas outras duas variáveis. E as quádricas na forma reduzida que são superfícies de revolução têm um dos eios coordenados como eio de simetria, que é o eio de rotação. Além disso, as secções da quádrica por planos perpendiculares ao eio de rotação são circunferências com centro no eio, ou ponto do eio, ou vazio. Isto ocorre, por eemplo no caso de Oz ser o eio de rotação da quádrica reduzida p(,, z) =, quando para cada constante k, p(,, k) = φ( + ). 6.3 Quádricas transladadas, eliminação dos termos lineares e equação na forma reduzida Suponha uma quádrica com centro fora da origem, mas com os planos de simetria paralelos aos planos coordenados. Por eemplo, um elipsóide de centro C = (c, c, c 3 ), com semi-eios a, b e c como apresentado na forma reduzida. Então, num sistema de coordenadas S = {C,,, z } obtido apenas transladando a origem para C, temos a equação ( ) + ( ) + (z ) =. a b c Como deduzido no caso do plano, temos no espaço, as equações de mudança: = c = c ou = + c = + c. z = z c 3 z = z + c 3 donde a equação no sistema original fica: ( c ) a + ( c ) b + (z c 3) c =.
10 39 Ou seja, se p(,, z) = representa uma quádrica com centro na origem, a equação p( c, c, z c 3 ) = representa a mesma quádrica com centro C = (c, c, c 3 ). No caso de quádricas sem centro, temos um resultado análogo. Na equação reduzida z = f(, ), obtivemos quádricas sem centro com uma espécie de vértice na origem. Se este vértice estiver no ponto V = (v, v, v 3 ), a equação da quádrica fica z v 3 = f( v, v ). Observe que as equações dessas quádricas com centro deslocados da origem geram equações com termos lineares. Por eemplo, epandindo a equação do cilindro ( ) + ( 3) = temos + + =. Como no caso das cônicas, se esta fosse a equação dada, podemos chegar na primeira equação completando quadrados e assim reconhecer a quádrica apresentada. Ou utilizando a matriz da quádrica, obtida de forma semelhante ao do caso caso das cônicas, podemos procurar o centro resolvendo um sistema linear com as 3 linhas da matriz. No eemplo, a equação p(,, z) = + + = fornece a matriz 6 simétrica A =, com parte quadrática dada por Q =. 6 c = Das 3 primeiras linhas obtemos o sistema, donde temos que C = c 6 = (c, c, c 3 ) = (, 3, ) é um centro (a última coordenada é livre, portanto temos uma reta de centros). Então, assim como no caso das cônicas, efetuando a mudança de coordenadas apenas com deslocamento da origem para o centro, utilizando as equações = +, = + 3, z = z +, obtemos uma nova equação nas novas coordenadas, p (,, z ) =
11 p( +, + 3, z + ) = ( ) + ( ) + p(, 3, ) = (os coeficientes da parte quadrática não se alteram com esse tipo de mudança). Como p(, 3, ) =, temos ( ) + ( ) =, ou seja, ( ) + ( 3) =, que representa o cilindro eĺıtico de eio central r : X = (, 3, ) + t(,, ), t R. Nesses casos em que não há termos mistos, pelo método do completamento de quadrados, também obtemos o mesmo resultado facilmente. Veja no eemplo: p(,, z) = + + = ( ) + ( 6) + = ( + ) + ( 6 + 9) + 8 = ( ) + ( 3) =. Nos casos de quádricas sem centro, mas sem termos mistos na equação, o completamento de quadrados é a forma para simplificação máima dos termos lineares (deiar somente uma das coordenadas na parte linear, como nos eemplos reduzidos): Na equação p(,, z) = z =, por eemplo, podemos eliminar a parte linear com e utilizando a parte quadrática, mas não podemos eliminar o z. Temos: 6++z = ( 6) ( )+z = ( 6+9) ( +)+ z 9+ = ( 3) ( ) +z 8 = ( 3) ( ) +(z 9/) =, donde temos um parabolóide hiperbólico (sela) z = ( ) + ( ), fazendo o deslocamento da origem para V = (3,, 9/). Pode ser que não seja possível ficarmos somente com um termo linear. Por eemplo, no caso da quádrica + z =, apenas a varável aparece na forma quadrática, e portanto, o completamento de quadrados não elimina a parte linear com as variáveis e z. Mas é possível, com uma rotação de eios, deiar a nova equação com apenas uma variável na parte linear: No eemplo, primeiro eliminamos na parte linear: + z = ( + ) z =. Logo, deslocando a origem do sistema para (,, ), temos a nova equação ( ) ( ) (z ) =. Agora, L(, z ) = ( ) ( ) = (( ) + (z )) = 5( ). Então, 3
12 a mudança de variáveis X = Y = , que representa uma rotação nos eios, Z = deia a nova equação na forma X 5Y =. O sistema {O, X, Y, Z} é dado, em relação ao sistema original, por O = (,, ), O X na direção de (,, ), O Y na direção de (, 5, Obtenção da equação reduzida e do esboço 5 ) e O Z na direção de (, 5, Seja então a equação da quádrica sem termos mistos, p(,, z) = a + a + a 33 z +a +a +a 3 z +a =. Podemos transformá-las (as equações) em uma das citadas no início, a menos de troca de variáveis entre si. Podemos utilizar os seguintes passos: 5 ) Para quádricas com centro:. No caso de quádricas com centro, se a equação apresentar termos lineares, utilizando completamento de quadrados ou achando o centro, podemos obter: p(,, z) = a ( c ) + a ( c ) + a 33 (z c 3 ) + p(c, c, c 3 ) = onde o centro é (c, c, c 3 ).. Se K = p(c, c, c 3 ) não for nulo, reescreva a equação, isolando K e transformandoo em, dividindo a equação por ele: a K ( c ) a K ( c ) a 33 K (z c 3) = λ ( c ) + λ ( c ) + λ 3 (z c 3 ) =. Se K =, pule esta etapa. 3. Finalmente, se achar necessário, faça modificação do tipo λ( c ) =
13 ) se λ > e λ( c ) ( c ) = λ ( c ) ( outras variáveis. Para quádricas sem centro: 3 ( λ ) se λ <. Análogo para. No caso de quádricas sem centro, pelo menos um dos coeficientes de ou ou z é nulo e, após completamento de quadrados, aparece, na parte linear, um ou dois termos não nulos sem seu correspondente quadrático. No primeiro caso, temos por eemplo: p(,, z) = a ( v ) + a ( v ) + a 3 (z v 3 ) =, onde V = (v, v, v 3 ) representará um vértice da quádrica sem centro. No segundo caso, temos por eemplo, p(,, z) = a ( v ) + a + a 3 z A 33 ) =. No primeiro caso, isole (z v 3 ) na equação, e fique com (z z ) = λ ( v ) + λ ( v ) no caso eemplificado acima. No segundo caso, efetue a mudança de coordenadas X = = v Y = a + a + a 3 a 3 z a + a 3, para obter a equação a 3 Z = + a + a 3 a z a + a 3 p(x, Y, Z) = a X + a + a 3Y + A 33 =. 3. Se achar necessário, faça o último tipo de modificação das quádricas com centro: λ( v ) = ( v ) ( ) se λ > e λ( v ) ( v ) = ( ) se λ <,... λ ( λ
14 33 Para obtenção do esboço da quádrica, é bom lembrar de alguns truques. Se na equação já na forma simplificada, ainda aparecer o centro ou o vértice, (,, z ) fora da origem, pode-se considerar X =, Y = e Z = z z, e desenhar a quádrica com a equação mais simplificada com centro (ou vértice) na origem do sistema. Esse novo sistema tem origem no ponto O = (,, z ) e eios O X, O Y e O Z paralelos aos eios O, O, Oz, respectivamente. E para fazer o esboço nessa forma mais simplificada ainda, F(X, Y, Z) =, eperimente os cortes pelos planos X =, Y = e Z =. Se ainda não for suficiente, faça mais cortes por planos paralelos a estes. De qualquer forma, tem que deiar catalogados na memória todos os modelos de quádricas, para reconhecer logo. Se houver troca de eios em relação aos modelos catalogados, não se esqueça de trocar os eios na hora do esboço. Eemplos e eercícios. Seja o elipsóide p(,, z) = z 5 =. Modifique a equação e deie na forma padrão do elipsóide com centro na origem a + b + z c =. Solução: primeiro, passamos o termo constante para o outro lado: z = 5. depois, com uma divisão, transformamos a constante em : z =. Por último, reescrevemos os coeficientes do primeiro lado: ( ) + 5 ( 5 3 ) + z ( ) = 5 Concluimos que a quádrica é um elipsóide com centro (,,), e semi-eios a = 5,
 menor que o posto da matriz 3 das 3 primeiras linhas da matriz A. A quádrica tem centro?")
15 3 b = e c = nos eios O, O e Oz, respectivamente.. Classifique e esboce a quádrica + z 8 z =. 3. Classifique e esboce a quádrica 8 z =.. Suponha que a matriz Q da parte quadrática tenha posto (ou característica) menor que o posto da matriz 3 das 3 primeiras linhas da matriz A. A quádrica tem centro? quais as possibilidades para a quádrica? 5. Sabia que as cônicas se chamam cônicas por serem, eceto alguns casos degenerados, obtidos a partir de um cone circular, seccionando-o por planos? Classifique a cônica de intersecção do cone + z = pelo plano + z =. Quais cortes dão elipses? E hipérboles? 6. Uma superfície de nível k de uma função real a três variáveis reais w = F(,, z) é definido como o conjunto dos pontos do espaço que satisfazem a equação F(,, z) = k. Uma quádrica é uma superfície de nível de uma função p(,, z) polinomial de grau dois em três variáveis. Por eemplo, para F(,, z) = + z, temos as superfícies de nível do tipo hiperbolóide de folhas para k <, que vão se encaiando como folhas, até chegar num cone no nível k = e passar a hiperbolóides de uma folha nos níveis k >, do lado de fora do cone. Considere agora a função G(,, z) = z e verifique a evolução das superfícies de nível, de k < passando por k = e indo para k >. Ídem para H(,, z) = z.
16 35 6. Quádricas com termos mistos Quando os termos mistos aparecem na equação da quádrica, algum plano de simetria não é paralelo a plano coordenado. Ou seja, a eliminação dos termos quadráticos se dá com uma mudança de coordenadas com alteração na base de vetores que definem as direções dos eios coordenados. Há um teorema clássico da Álgebra Linear (Teorema Espectral) que garante que a simplificação é possível. Além disso, o sistema S = {O,,, z } com base de vetores E = { e, e, e 3 }, na qual a nova equação fica sem termos mistos, ocorre numa base ortonormal, obtida como auto-vetores da matriz Q da parte quadrática. Nas novas equações, somente com mudança da base de vetores, a parte quadrática fica na forma diagonal, isto é, q (,, z ) = λ ( ) + λ ( ) + λ 3 (z ), onde λ, λ e λ 3 são os chamados auto-valores da matriz Q. Além disso, esta mudança não altera o termo independente. Por eemplo, considere a equação p(,, z) = z + z =, com parte quadrática q(,, z) = z + z. 3 A matriz da quádrica é A =, e Q = 3. Vamos calcular os autovalores λ i de Q, que satisfazem a equação det(q λi) =, onde I é a matriz identidade. λ 3 λ = λ + 5λ λ 3 =, logo λ =, λ = + 6, λ λ 3 = 6. Encontramos um auto-vetor v i de Q associado ao autovalorλ i, resolvendo o sistema
17 36 linear λ i a 3 λ i b = λ i c Temos então, para λ =, v = (,, ), para λ = + 6, v = (, + (6), ) e para λ 3 = 6, v 3 = (, 6, ). Normalizando, temos os vetores e, e, e 3 da base ortonormal do novo sistema com eios O, O e Oz, onde a nova equação fica: ( ) + ( + 6)( ) + ( 6)(z ) =, donde podemos concluir que a quádrica é um hiperbolóide de uma folha. Observamos que mesmo neste caso, os autovalores sendo raízes de um polinômio cúbico, pode não ter cálculo muito simples. Se partimos de uma equação com termos mistos e parte linear, primeiro tente eliminar os termos lineares e depois, os termos mistos. Se a quádrica for sem centro, portanto não é possível eliminar os termos lineares, lembre-se que esta mudança de coordenadas altera os termos lineares se estes eistirem. Para saber como eles são alterados, precisarmos saber como são as equações de mudança, quando se altera a base de vetores. Como no caso do plano, se C = { ı, j, k} é a base do sistema S = {O,,, z} e E = { e, e, e 3 } é a base do sistema S = {O,,, z }, onde e = (a, b, c ) C, e = (a, b, c ) C e e 3 = (a 3, b 3, c 3 ) C, temos: P = (,, z) S OP = (,, z) C = ı + j + z k () P = (,, z ) S OP = (,, z ) E = e + e + z e 3 () Substituindo e, e e e 3 em (), temos OP = (a + a + a 3 z, b + b + b 3 z, c + c + c 3 z ) C,
18 37 donde, por (), tem-se que a a a 3 = b b b 3 z c c c 3 z. Como as bases são ortonormais, a matriz de mudança que aparece acima é uma matriz ortogonal (sua inversa é a transposta) e portanto, temos também que a b c = a b c. z a 3 b 3 c 3 z Com essas equações de mudança, obtendo-se a base ortonormal de autovetores de Q, pode-se conhecer a nova parte linear, quando necessário. O efeito das mudanças de coordenadas cartesianas estudadas sobre a matriz da quádrica A e a sua parte quadrática Q é que o determinante de ambas é invariante, assim como o traço da parte quadrática. Assim, é possivel obter muitas informações da quádrica sem efetuar de fato as mudanças de coordenadas. Por eemplo, se C = (c, c, c 3 ) é o centro da quádrica p(,, z) =, p(c, c, c 3 ) = det(a) é o novo termo independente det(q) da equação, depois das mudanças de coordenadas. (eercício!) 6.5 Introdução às superfícies no espaço A maioria das quádricas apresentadas são eemplos típicos de superfícies, entendidos intuitivamente como objetos no espaço que são reuniões de partes que se assemelham a pedaços de planos (sem rasgos nem bicos), coladas umas nas outras de forma suave. Ou seja, superfícies bidimensionais, que em quase todos os seus pontos pode-se falar em plano tangente à superfície no ponto, etc. Também como no caso de curvas no plano, uma superfície pode ser descrita, no sistema cartesiano do espaço, na forma paramétrica (agora com dois parâmetros: = (t, s),
19 38 = (t, s), z = z(t, s)), ou na forma implicita (por uma equação f(,, z) = como as quádricas) ou como gráfico de funções (gráfico de z = f(, ) ou = f(, z) ou = f(, z)), pelo menos por partes. É importante saber distinguir essas formas, até para utilizarmos um computador para desenhá-las. Superfícies que são gráficos de funções e superfícies dadas por parametrizações são facilmente obtidas no programa Octave (veja na última sessão deste capítulo). A eistência de um plano tangente em cada ponto está relacionada a condições de diferenciabilidade das funções envolvidas e deverá ser tratada com as ferramentas do Cálculo Diferencial de Várias Variáveis. A seguir, vamos trabalhar um pouco com a forma impĺıcita e a forma paramétrica das superfícies ciĺındricas, dos cones sobre curvas e das superfícies de revolução Superfícies cilíndricas Considere uma curva plana C no espaço, e v um vetor transversal (não paralelo) ao plano da curva. O cilindro de diretriz C e geratrizes paralelas a v é a reunião das retas que passam por um ponto de C e são paralelas a v. Isto é, é o conjunto dos pontos P que podem ser escritos na forma P = Q + s v onde Q C e s R. Os primeiros eemplos de superfícies ciĺındricas são aquelas em que na equação f(,, z) = alguma das variáveis não comparece eplicitamente. As geratrizes do cilindro serão pa-
20 39 ralelas ao eio da variável que não comparece e a curva diretriz é a curva determinada no plano das outras variáveis. Vimos alguns eemplos na apresentação das quádricas reduzidas. Vejamos mais um eemplo: na equação + 9 = a variável z não comparece eplicitamente. Isto significa que esta variável é livre, sendo portanto a superfície um cilindro com geratrizes paralelas a k = (,, ). O cilindro deste eemplo tem como diretriz a circunferência de raio 3 e centro na origem do plano O. = f(t) Se C é dado parametricamente por = g(t), com o parâmetro t I, e v = (a, b, c), obtemos a parametrização z = h(t) = f(t) + s a = g(t) + s b, com os parâmetros t I e z = h(t) + s c s R. Fazendo, na parametrização dada, s [, ], estamos descrevendo um tronco de cilindro cujas geratrizes são segmentos de mesmo comprimento e direção que v. Por eemplo, o cilindro sobre a circunferência de raio 3 e centro (,, ) no plano 5 3 z = e geratrizes paralelas a v = (, 3, 5) = 3 cost + s é parametrizada por = 3 sen t + 3s, z = 5s com t [, π], s R. 6 Se C é dada implicitamente por equações a 3 variáveis, f(,, z) = e g(,, z) = (toda equação nas variáveis, e z pode ser colocada na forma F(,, z) = ), e v = (a, b, c) é a direção das geratrizes, podemos obter a equação do cilindro, da seguinte forma: Para cada P = (,, z) do cilindro, seja Q = (X, Y, Z) C tal que Q = P + λ v,
21 X = + λa para algum λ R. Ou seja, Y = + λb Z = z + λc. 3 Como Q = (X, Y, Z) C, devemos ter f(x, Y, Z) = e g(x, Y, Z) =. Substituindo X, Y e Z pelas equações envolvendo,, z e λ, se tiver sorte, podese obter λ em função de, e z por uma das equações e, substituindo λ na outra equação, obter uma equação F(,, z) = para descrever os pontos (,, z) do cilindro. Veja o mesmo eemplo do cilindro parametrizado acima: C é dada pelas equações f(,, z) = + 9 = + = 9 e z =. Ou seja, C :. Se v = (, 3, 5), para g(,, z) = z = X = + λ cada (,, z) no cilindro, temos Y = + 3λ para algum (X, Y, Z) na circunferência Z = z + 5λ f(x, Y, Z) = ( + λ) + ( + 3λ) 9 = e λ R. Substituindo nas equações de C tem-se: g(x, Y, Z) = z + 5λ = Donde λ = z 5 e, portanto, ( z 5 ) + ( 3 z 5 ) 9 = é a equação do cilindro. Como a equação é dada por um polinômio de grau nas variáveis, e z, este cilindro é um eemplo de quádrica. Eercícios: Esboce e obtenha as formas paramétrica e impĺıcita do cilindro com diretriz C e geratrizes paralelas a v, nos seguintes casos:.. C é a elipse no plano Oz dada pela equação v = (5,, ). ( ) + (z + ) 9 = e z = ;
22 3. C é um ramo de hipérbole dado por = cosh t, =, z = senh t, com t R (verifique que satisfaz a equação z = ); v = (,, ); faça também com v = (,, 3) Cones sobre curvas Seja C uma curva plana no espaço e V um ponto, não pertencente ao plano da curva. O cone de diretriz C e vértice V é a reunião das retas passando por V e por um ponto da curva. O cone mais clássico é a quádrica a + b z =, que é um cone tendo como c vértice o ponto (,, ) e como diretriz qualquer uma de suas secções planas eĺıticas. Se P cone, eiste Q C tal que P = V + s(q V ) para algum s R. Ou, Q = V + t(p V ), para algum t R. Se quisermos obter o cone na forma paramétrica, usamos a primeira forma: P = V + s(q V ), e substituimos Q pela forma paramétrica da curva. Se quisermos a equação do cone, usamos a segunda forma: Q = V + λ(p V ) e fazemos f(q) = e g(q) =, onde f = e g = seriam as equações da curva C.
23 Por eemplo, o cone cuja diretriz é a circunferência C : e vértice V = + = z = (,, ) tem as equações paramétricas dadas por: = cost + s(cost ) = sen t + s(sen t ) z = s [, π] e s R. X = + λ( ) Para obter a equação do cone, escrevemos Y = + λ( ), com t, substituímos nas Z = + λ(z ) X + Y = equações, e eliminamos λ. De Z = + λ(z ) = tem-se que λ = Z = ( ) ( ) ( ) ( ), e substituindo na outra equação, temos + =. z (z ) (z ) Este cone também pode ser reescrito como uma quádrica (Eercício: obtenha o polinômio de grau que define esta quádrica.) Eercícios: Esboce e obtenha as formas paramétrica e impĺıcita do cone com diretriz C e vértice V, nos seguintes casos:. C é a elipse no plano Oz dada pela equação V = (5,, ). ( ) + (z + ) 9 = e = ;. C é a parábola dado por = t, =, z = t 5t, com t R; V = (,, ); faça também com V = (,, 3).
24 Superfícies de revolução Seja C uma curva plana, e r uma reta contida no plano da curva. Sob certas condições sobre esses elementos, rotacionando a curva em torno da reta r, obtemos uma superfície de revolução de C em torno de r. Observe que a superfície é a reunião das circunferências que passam por pontos de C e centro em r, em planos perpendiculares a r. Os eemplos mais simples de superfícies de revolução f(,, z) = são aqueles que para cada z = k, f(,, k) = é uma equação de uma circunferência de mesmo centro (, ) no plano O, podendo-se degenerar no ponto (, ) ou no vazio. Neste caso, é uma superfície de revolução em torno do eio r : X = (,, ) + t(,, ), desde que a secção pelo plano = seja uma curva Voltemos ao caso geral Por eemplo, o hiperbolóide de uma folha f(,, z) = + z = é uma superfície de revolução de uma hipérbole em torno do eio Oz, já que para cada z = k, f(,, k) = + k = representa a circunferência de centro (, ) e raio + k no plano O. = f(t) Suponha a curva C dada parametricamente: C : = g(t), t I. Para cada z = h(t) t I, seja r(t) o ponto de r tal que o vetor (f(t), g(t), h(t)) r(t) seja perpendicular a r e tenha norma ρ(t). O ponto r(t) corresponde ao centro da circunferência e ρ(t) é o raio. Seja e, e um par de vetores unitários e ortogonais a r (paralelos aos planos das circunferências). Então temos a seguinte parametrização da superfície de revolução:
25 3 (,, z) = r(t) + ρ(t) coss e + ρ(t) sen s e, t I, s [, π]. Isto fica bem mais simples quando r = Oz e C é uma curva no plano Oz dada como gráfico de uma função = f(z), com z I. = f(t) Teremos a parametrização C : = com t I, da curva, e podemos tomar z = t e = (,, ), e = (,, ), r(t) = (,, t), ρ(t) = f(t). Assim, (,, z) = (,, t) + f(t)(coss, sen s, ), t I, s [, π], ou seja, = f(t) coss = f(t) sen s, t I, s [, π]. z = t A mesma parametrização, se r = Oz e C é uma curva no plano Oz como gráfico da função = f(z).
26 Se r = Oz e a curva é dada por C : = f(t) = z = g(t), t I, no plano Oz, temos os raios raio(t) = f(t) e os centros r(t) = (,, g(t). Assim, (,, z) = (,, g(t)) + f(t)(coss, sen s, ), t I, s [, π], ou seja, = f(t) coss = f(t) sen s, t I, s [, π]. O z = g(t) Q = (f(t),, g(t)) C f(t) r = Oz 35 ρ = f(t) p(,, z) O z = g(t) O z = g(t) Obtém-se resultados análogos, mantendo os eios de rotação como um dos eios coordenados e a curva num dos planos coordenados. Por eemplo, o catenóide obtido rotacionando a catenária = cosh(z) do plano Oz em torno do eio Oz, obtemos a parametrização (,, z) = (,, t)+cosh(t)(coss, sen s, ), t R, s [, π]: = cosh(t) coss = cosh t sen s, t R, s [, π] z = t = 3 cost O elipsóide obtido rotacionando a elipse = em torno do eio Oz pode ser z = sen t dada parametricamente por (,, z) = (,, sent) + 3 cost(cos s, sen s, ), t [, π],
27 = 3 costcoss s [, π], ou seja, = 3 costsen s, t [, π], s [, π]. 36 z = sen t O toro (pneu, rosquinha, bóia, etc) obtido rotacionando a circunferência = 3 + cost = z = sen t, t [, π], em torno do eio r = Oz tem parametrização dada por = (3 + cost) coss = (3 + cost) sen s z = sen t, t [, π], s [, π]. Considere agora o caso de r = Oz, e C no plano Oz dada por equações f(,, z) = e g(,, z) = =.
28 O X r = Oz O 37 Se (X,, Z) C, então os pontos (,, z) X = da circunferência de centro (,, Z) e raio Q + ρ(z) = X pertencem à superfície de revolução. p(,, z) Z O z = Z Z = z Ou seja,. + = ρ (Z) = X f(x, Y, Z) = C Juntamente com, Y = pode-se obter uma equação em, e z. + 3z = 5 Por eemplo, rotacionando a elipse C : em torno do eio Oz, obte- = mos um elipsóide de revolução. Seja (X, Y, Z) um ponto na elipse. Os pontos (,, z) do elipsóide com z = Z, estão na circunferência de centro (,, Z) e raio ρ(z) = X + Y. X + Y = + Ou seja, satisfazem as equações. Assim, das equações da elipse Z = z X + 3Z = 5, segue que + +3z = 5 é a equação da superfície, conhecida como Y = elipsóide. Ou seja, esse elipsóide é dado implicitamente pela equação + +3z 5 = e portanto, esse elipsóide é um caso de quádrica. Eercícios: I. Esboce a superfície, e obtenha as formas paramétrica e impĺıcita da superfície de revolução da curva C em torno do eio r, nos seguintes casos:. C é a elipse no plano Oz dada pela equação ( 3) + z 9 = e = ; r = O.. C é a parábola dado por = t, =, z = t, com t R; r = Oz; faça também com r = O, pelo menos a paramétrica. Qual dos casos a superfície é uma quádrica?
29 38 3. C é uma reta paralela ao eio O, dada por =, z = 5. Faça para r = O e para r = Oz.. C é uma reta que cruza o eio O, dada por =, z = 5. Faça rotação em torno de r = O e r = Oz. II. Obtenha a superfície dada como uma superfície de revolução, isto é, eiba a curva e o eio de rotação, e mostre as equações (a que não tiver sido dada).. Cone circular com vértice V = (,, ) cujas geratrizes formam ângulo π/ com o eio O.. Cilindro circular de raio 5 e eio central O. 3. Esfera de centro (,, 5) e raio 3.. O hiperbolóide de uma folha dada pela equação + z =. 5. O hiperbolóide de folhas dada pela equação z = Gráficos de funções de variáveis Uma função real de duas variáveis reais f : D R R, associa a cada ponto (, ) do seu domínio D R um número real z = f(, ) R. O seu gráfico é o conjunto Graf(f) = { (,, f(, )) (, ) D } no espaço R 3. Uma superfície dada como gráfico de f(, ), tem naturalmente a equação z = f(, ) e a forma paramétrica (,, z) = (t, s, f(t, s)), com (t, s) D. Mas, dependendo da situação, podemos identificar o domínio D de uma função de variáveis dentro do plano Oz ou Oz, em vez de O, tendo como gráficos as superfícies de equação = g(, z) ou = h(, z) e parametrização (,, z) = (t, g(t, s), s) ou (,, z) = (h(t, s), t, s).
30 39 Observadas certas condições, como continuidade e diferenciabilidade, a serem esclarecidos mais tarde, o gráfico de uma função z = f(, ) é uma superfície suave (sem bicos e rasgos). Toda superfície suave no R 3 deve ser uma reunião de superfícies dadas como gráfico de funções boas, do tipo z = f(, ) ou = g(, z) ou = h(, z), com as emendas suaves. Aqui vamos apenas apresentar alguns eemplos de gráficos, sem nos preocuparmos em justificar se realmente os gráficos são superfícies suaves. Eemplos e eercícios.. O gráfico da função f(, ) = a( ) + b( ) + c, onde a, b, c, e são constantes reais, é um plano no espaço com vetor normal N = (a, b, ) e passando pelo ponto (,, c).. O gráfico da função f(, ) = é uma calota esférica, pois devemos ter z = f (, ) = z + + z = = z 3. O gráfico da função f(, ) = + é um parabolóide de revolução, passando pelo vértice (,, ). Você pode visualizar isto, obtendo os cortes do gráfico por planos paralelos aos planos coordenados: Cortando com o plano z =, devemos resolver f(, ) = + = z =. Daí, temos =, = e z =, e vemos que temos somente o vértice V = (,, ). Cortando com um plano z = k <, não temos nada, pois + nunca é negativo. Cortando com um plano z = k >, temos circunferências de raio k e centro (,, k), das equações + = k e z = k. Trata-se portanto de uma
31 33 superfície de revolução de uma curva em torno do eio Oz. z = + z = Cortando com o plano =, temos = que é = = uma parábola no plano Oz. Logo, o gráfico é a superfície obtida pela rotação da parábola em torno do eio Oz. Eercícios: Obtenha um esboço do gráfico de f(, ) = + +. Qual o nome da superfície? Ídem para g(, ) = ( 3) +( ) 5. Qual a diferença desta superfície para a anterior? ( ). Eercício: Obtenha um esboço do parabolóide eĺıtico, gráfico de f(, ) = + ( ), analisando diversos cortes da superfície por planos paralelos aos planos 9 coordenados. 5. O gráfico da função f(, ) = é uma superfície chamada sela ou parabolóide hiperbólico. Obtenha as curvas de nível de f (veja a definição no último eemplo de curvas no plano), para os níveis k =, k = e k =. Obtenha os cortes pelos planos =, =, =, =, =, =. Esboce a superfície. 6. O gráfico da função f(, ) = é um cilindro parabólico. Veja superfícies ciĺındricas. Obtenha as secções do cilindro pelos planos =, = e z = k. 7. Obtenha o gráfico da função f(, ) = ln( + ). Antes, determine o domínio da função. 8. Todos os gráficos de funções que são também superfícies de revolução em torno do eio Oz são da forma z = f(, ) = φ( + ). Descreva uma forma prática de esboçar o gráfico de uma função deste tipo.
32 Superfícies Regradas Superfícies regradas são reuniões de retas. Já vimos os cilindros e cones, mas temos outras superfícies com essa propriedade. Entre as quádricas, podemos citar o hiperbolóide de uma folha, de revolução, tipo um cesto de lio. Temos também o parabolóide hiperbólico ou sela. O helicóide, grosseiramente aproimado por uma escada em caracol, pode ser obtido por uma hélice e retas ligadas ao eio da hélice.. Para obter um hiperbolóide de uma folha regrado, considere duas circunferências de mesmo raio, em planos paralelos: = cost + = C : = = sen t z = z = + = e C : z = = cost = = sen t z = Ligue os pontos de uma circunferência com os da outra, de forma que haja uma defazagem no parâmetro, isto é, ligue (cost, sen t, ) com (cos(t + θ), sen(t + θ), ), para algum θ fio. Então (,, z) = (cos t, sen t, ) + s(cos(t + θ) cos t, sen(t + θ) sen t, ). Essa é a construção da cesta de lio, usando um fundo circular e varetas formando o contorno, todos colocados na borda da base formando o mesmo ângulo com o plano da base. Quando as varetas ficam perpendiculares à base (θ = ), temos o cilindro circular. Na verdade, dado um hiperbolóide de uma folha a + b z =, e um ponto p = c (,, z ) no hiperbolóide, o plano T p : a ( )+ b ( ) z c (z z ) = intercepta o hiperbolóide segundo duas retas concorrentes, que são as retas do.
33 33 hiperbolóide passando pelo ponto.. Uma sela (parabolóide hiperbólico) regrada pode ser obtida tomando-se inicialmente um quadrado com reticulado de retas como uma peneira com beirada quadrada. Suponha os lados do quadrado de material duro, mas articulável nas quinas, de forma que se possa suspender dois vértices opostos ao mesmo tempo, mantendo os outros dois no lugar. E suponha as linhas que formam o reticulado elásticas e sempre esticadas em linha reta A superfície formada pelo reticulado é de uma sela. Na figura, a sela z = De uma forma geral, para cada ponto p = (,, z ) de uma sela z = a b, o plano T p : z = z + ( a ) ( b ) intercepta a sela segundo duas retas concorrentes. 3. Vamos aqui construir a parametrização do helicóide, reunindo as retas que passam pela hélice (,, z) = (cost, sen t, t) e pelo ponto (,, t) Oz.
34 A parametrização fica: (,, z) = (,, t) + s(cost, sen t, ), t R e s R. Modelos aproimados do helicóide, além das escadas em caracol, podem ser vistas feitas com palitos de sorvete para girarem com o vento Coordenadas esféricas Como no caso de coordenadas polares no plano, podemos descrever os pontos do espaço através das coordenadas esféricas ou das coordenadas ciĺındricas. O primeiro, como o nome diz, se presta mais a descrever os pontos através de sua posição em esferas. Considere um ponto fio O, a origem do sistema. Considere um plano de referência passando por O e um eio de referência, contida no plano e passando também por O. Na passagem entre coordenadas esféricas e coordenadas cartesianas Oz, consideramos O como a origem do sistema cartesiano, o plano de referência como o plano Oz e o eio, o Oz. Para cada ponto P no espaço (P O), consideraremos r a distância do ponto a O, θ o ângulo do raio OP com o eio Oz de referência, e φ o ângulo entre o plano Oz de referência e o plano contendo o eio Oz e o ponto P, que coimcide com o ângulo formado com a projeção ortogonal de OP sobre o plano O e o eio O. Assim, dada a terna r, θ, φ, com r >, θ π e φ < π, pode-se determinar eatamente a posição do ponto e vice-versa. Na origem, apenas indicamos r =. A relação entre as coordenadas cartesianas (,, z) e esféricas (r, θ, φ) fica portanto
35 33 equacionado por = r sen θ cosφ = r sen θ sen φ. z = r cosθ Eemplos e eercícios. Uma esfera de centro na origem e raio R, tem a equação em coordenadas esféricas dada simplesmente por r = R. A partir disso, fica fácil obter a parametrização da esfera em coordenadas cartesianas: θ π e φ < π. = R sen θ cos φ = R sen θ sen φ z = R cosθ Eercícios: () Obtenha as equações paramétricas (em coordenadas cartesianas) de uma esfera com centro na origem e raio 5. () Depois, da calota superior dessa esfera (z ) mudando a variação dos parâmetros. (3) Supondo que a esfera representa o globo terrestre em escala menor, sendo o equador no plano z =, represente os paralelos e os meridianos. () Obtenha a parametrização da esfera de centro (a, b, c) e raio R, em coordenadas cartesianas.. Um cone circular reto com vértice na origem e geratrizes formando ângulo θ com o eio Oz, tem equação θ = θ em coordenadas esféricas. A partir disso, segue a parametrização do cone sem o vértice, em coordenadas cartesianas: = r sen θ cos φ = r sen θ sen φ z = r cosθ,,
36 335 com r > e φ < π. Eercício: Qual a parametrização do cone cujo com vértice na origem cujas geratrizes formam ângulos de 3 graus com o eio Oz? Coordenadas cilíndricas As coordenadas ciĺındricas, como o nome diz, descreve os pontos do espaço através da descrição do ponto em cilindros. Considere um ponto do origem, O que compararemos com a origem de um sistema cartesiano. Considere um eio de referência Oz e o plano de referência Oz. Para cada ponto P O, considere o cilindro circular reto de raio ρ e eio Oz, a distância z de P ao plano O (perpendicular a Oz por O) e ângulo φ do plano por Oz e P e o plano Oz. As coordenadas ciĺındricas de P são dadas por ρ, φ e = ρ cosφ z, que se relacionam com o sistema cartesiano pelas equações = ρ sen φ, z = z com ρ >, φ < π e z R. Um cilindro circular reto de raio R e eio central Oz pode ser escrita pela equação ρ = R em coordenadas ciĺındricas. Assim, uma parametrização do mesmo cilindro, em = R cos φ coordenadas cartesianas pode ser dada por = R sen φ, com φ < π e t R. z = t Eercício: Descreva geometricamente e faça um esboço dos conjuntos de pontos, dados em coordenadas ciĺındricas:. φ = π/3. ρ, π/3 φ π, z.
37 z = 3, ρ = 6.6 Desenhando superfícies no computador Ja vimos que o programa Octave podia ser utilizado para desenhar planos. Vamos agora desenhar algumas superfícies dadas coomo gráfico de função e outras dadas parametricamente. Entre as quádricas que eram gráfico de funções z = f(, ) temos o parabolóide eĺıtico, o parabolóide hiperbólico e o cilindro parabólico. Por eemplo, para obter o parabolóide eĺıtico z = 9 +, para (, ) [, ] [, ], no Octave, basta entrar com: = = [-:.:]; % variaç~ao de e [,] = meshgrid(,); zz=.^/9 +.^/; surf(,,zz) Para o parabolóide hiperbólico z =, para a mesma variação de e, basta trocar a epressão de zz: zz =.^-.^. Como eercício, obtenha o cilindro parabólico z = para os mesmos e. Certas quádricas são melhor traçadas quando utilizamos a forma forma paramétrica, como por eemplo o cilindro, a esfera e o cone: Para desenharmos o cilindro eĺıtico + =, parametrizado por = cost, 9 = 3 sen t, z = s, com t [ π, π] e s [, ], podemos fazer: t = [:.:6.3]; s = [:.5:]; [tt,ss] = meshgrid(t,s); = *cos(tt); = 3*sin(tt); z=ss; surf(,,z)
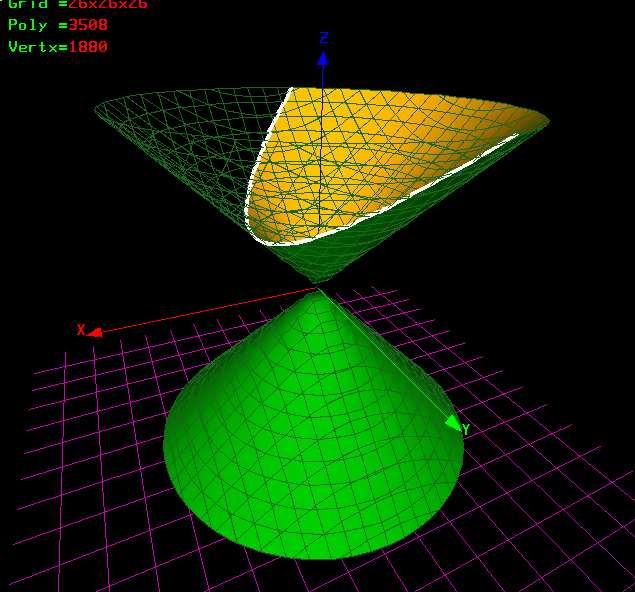
38 337 Para desenharmos o elipsóide z =, através da parametrização = 3 sen t coss, = sen t sen s, z = cos t, t [, π], s [, π], fazemos t = linspace(,pi,); s = linspace(,*pi,); [tt,ss] = meshgrid(t,s); = 3*sin(tt).*cos(ss); = *sin(tt).*sin(ss); z=cos(tt); surf(,,z) O cone + 9 z =, com parametrização = t coss, = 3t sen s, z = t, t [, ], s [ π, π], pode ser obtido com: t = linspace(-,,); s = linspace(-pi,pi,); [tt,ss] = meshgrid(t,s); = *tt.*cos(ss); = 3*tt.*sin(ss); z=*tt; surf(,,z) Observe que o gráfico de função z = f(, ) é parametrizado naturalmente por = t, = s, z = f(t, s), que dá o mesmo resultado. Como desenhamos as superfícies pelas equações f(,, z) =? Para o traçado de superfícies impĺıcitas com software livre, sugerimos que procure programas específicos para traçados de vários tipos de superfícies, incluindo as impĺıcitas, como o K3dSurf. Veja a secção do cone + z = pelo plano +z = gerando a parábola, obtida com o K3dsurf, onde foi solicitado para desenhar o cone, com a condição + z <.5.
39 338
Cálculo II - Superfícies no Espaço
 UFJF - DEPARTAMENTO DE MATEMÁTICA Cálculo II - Superfícies no Espaço Prof. Wilhelm Passarella Freire Prof. Grigori Chapiro 1 Conteúdo 1 Introdução 4 2 Plano 6 2.1 Parametrização do plano...................................
UFJF - DEPARTAMENTO DE MATEMÁTICA Cálculo II - Superfícies no Espaço Prof. Wilhelm Passarella Freire Prof. Grigori Chapiro 1 Conteúdo 1 Introdução 4 2 Plano 6 2.1 Parametrização do plano...................................
Superfícies e Curvas no Espaço
 Superfícies e Curvas no Espaço Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de deembro de 2001 1 Quádricas Nesta
Superfícies e Curvas no Espaço Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de deembro de 2001 1 Quádricas Nesta
Capítulo 3 - Geometria Analítica
 1. Gráficos de Equações Capítulo 3 - Geometria Analítica Conceito:O gráfico de uma equação é o conjunto de todos os pontos e somente estes pontos, cujas coordenadas satisfazem a equação. Assim, o gráfico
1. Gráficos de Equações Capítulo 3 - Geometria Analítica Conceito:O gráfico de uma equação é o conjunto de todos os pontos e somente estes pontos, cujas coordenadas satisfazem a equação. Assim, o gráfico
MAT Poli Cônicas - Parte I
 MAT2454 - Poli - 2011 Cônicas - Parte I Uma equação quadrática em duas variáveis, x e y, é uma equação da forma ax 2 +by 2 +cxy +dx+ey +f = 0, em que pelo menos um doscoeficientes a, b oucénão nulo 1.
MAT2454 - Poli - 2011 Cônicas - Parte I Uma equação quadrática em duas variáveis, x e y, é uma equação da forma ax 2 +by 2 +cxy +dx+ey +f = 0, em que pelo menos um doscoeficientes a, b oucénão nulo 1.
PARTE 4. ESFERAS E SUPERFÍCIES QUÁDRICAS EM GERAL (Leitura para Casa)
") PARTE 4 REVISÃO DE PLANOS, CILINDROS, SUPERFÍCIES DE REVOLUÇÃO, ESFERAS E SUPERFÍCIES QUÁDRICAS EM GERAL (Leitura para Casa) Vamos agora faer uma revisão de planos, cilindros, superfícies de revolução,
PARTE 4 REVISÃO DE PLANOS, CILINDROS, SUPERFÍCIES DE REVOLUÇÃO, ESFERAS E SUPERFÍCIES QUÁDRICAS EM GERAL (Leitura para Casa) Vamos agora faer uma revisão de planos, cilindros, superfícies de revolução,
21 e 22. Superfícies Quádricas. Sumário
 21 e 22 Superfícies uádricas Sumário 21.1 Introdução....................... 2 21.2 Elipsoide........................ 3 21.3 Hiperboloide de uma Folha.............. 4 21.4 Hiperboloide de duas folhas..............
21 e 22 Superfícies uádricas Sumário 21.1 Introdução....................... 2 21.2 Elipsoide........................ 3 21.3 Hiperboloide de uma Folha.............. 4 21.4 Hiperboloide de duas folhas..............
Lista 5: Superfícies. (e) x = 4 tan(t) (f) x = (g) x = 1 4 csc(t) y = cosh(2t)
 x = 4 tan(t) (f) x = (g) x = 1 4 csc(t) y = cosh(2t)") 1. Parametrize as seguintes curvas. + = 16 + 5 = 15 = 4 = 16 + 5 + 8 7 = 0 (f) + 4 + 1 + 6 = 0. Lista 5: Superfícies (g) = + (h) + = (i) + = 4 (j) + = 1 (k) 6 + 18 = 0 (l) r = sin(θ). Determine a equação
1. Parametrize as seguintes curvas. + = 16 + 5 = 15 = 4 = 16 + 5 + 8 7 = 0 (f) + 4 + 1 + 6 = 0. Lista 5: Superfícies (g) = + (h) + = (i) + = 4 (j) + = 1 (k) 6 + 18 = 0 (l) r = sin(θ). Determine a equação
1 Cônicas Não Degeneradas
 Seções Cônicas Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de dezembro de 2001 Estudaremos as (seções) cônicas,
Seções Cônicas Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de dezembro de 2001 Estudaremos as (seções) cônicas,
Marcelo M. Santos DM-IMECC-UNICAMP msantos/
 Universidade Estadual de Maringá - Departamento de Matemática Cálculo Diferencial e Integral: um KIT de Sobrevivência 0 anos c Publicação Eletrônica do KIT http://www.dma.uem.br/kit Identificação de Cônicas
Universidade Estadual de Maringá - Departamento de Matemática Cálculo Diferencial e Integral: um KIT de Sobrevivência 0 anos c Publicação Eletrônica do KIT http://www.dma.uem.br/kit Identificação de Cônicas
,,,,,,,, e são constantes com,,,, e, não todas nulas. Uma equação desse tipo é a equação de uma quádrica. Observe que a equação
 Capítulo 5 As Superfícies O estudo das superfícies do espaço, iniciado com os planos no capítulo anterior, tem como sequência natural a classi cação das superfícies que podem ser expressas por equações
Capítulo 5 As Superfícies O estudo das superfícies do espaço, iniciado com os planos no capítulo anterior, tem como sequência natural a classi cação das superfícies que podem ser expressas por equações
Aula 17 Superfícies quádricas - parabolóides
 Objetivos Aula 17 Superfícies quádricas - parabolóides Apresentar os parabolóides elípticos e hiperbólicos identificando suas seções planas. Estudar os parabolóides regrados e de revolução. Nas superfícies
Objetivos Aula 17 Superfícies quádricas - parabolóides Apresentar os parabolóides elípticos e hiperbólicos identificando suas seções planas. Estudar os parabolóides regrados e de revolução. Nas superfícies
SUPERFÍCIES QUÁDRICAS
 1 SUPERFÍCIES QUÁDRICAS Dá-se o nome de superfície quádrica ou simplesmente quádrica ao gráfico de uma equação do segundo grau, nas variáveis, e, da forma: A + B + C + D + E + F + G + H + I + K = 0, que
1 SUPERFÍCIES QUÁDRICAS Dá-se o nome de superfície quádrica ou simplesmente quádrica ao gráfico de uma equação do segundo grau, nas variáveis, e, da forma: A + B + C + D + E + F + G + H + I + K = 0, que
UNIVERSIDADE FEDERAL DE ALAGOAS INSTITUTO DE MATEMÁTICA Aluno(a): Professor(a): Curso:
: Professor(a): Curso:") 5 Geometria Analítica - a Avaliação - 6 de setembro de 0 Justique todas as suas respostas.. Dados os vetores u = (, ) e v = (, ), determine os vetores m e n tais que: { m n = u, v u + v m + n = P roj u
5 Geometria Analítica - a Avaliação - 6 de setembro de 0 Justique todas as suas respostas.. Dados os vetores u = (, ) e v = (, ), determine os vetores m e n tais que: { m n = u, v u + v m + n = P roj u
Lista 5: Superfícies Engenharia Mecânica - Professora Elisandra Bär de Figueiredo
 Lista 5: Superfícies Engenharia Mecânica - Professora Elisandra Bär de Figueiredo Nos eercícios 1 ao 18 identique e represente geometricamente as superfícies dadas pelas equações: 1. + 9 = 6. = 16. = 9.
Lista 5: Superfícies Engenharia Mecânica - Professora Elisandra Bär de Figueiredo Nos eercícios 1 ao 18 identique e represente geometricamente as superfícies dadas pelas equações: 1. + 9 = 6. = 16. = 9.
23 e 24. Forma Quadrática e Equação do Segundo Grau em R 3. Sumário
 23 e 24 Forma Quadrática e Equação do Segundo Grau em R 3 Sumário 23.1 Introdução....................... 2 23.2 Autovalores e Autovetores de uma matriz 3 3.. 2 23.3 Mudança de Coordenadas no Espaço........
23 e 24 Forma Quadrática e Equação do Segundo Grau em R 3 Sumário 23.1 Introdução....................... 2 23.2 Autovalores e Autovetores de uma matriz 3 3.. 2 23.3 Mudança de Coordenadas no Espaço........
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO
 INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-458 Álgebra Linear para Engenharia II Terceira Lista de Eercícios - Professor: Equipe da Disciplina EXERCÍCIOS 1. Seja V um espaço vetorial
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-458 Álgebra Linear para Engenharia II Terceira Lista de Eercícios - Professor: Equipe da Disciplina EXERCÍCIOS 1. Seja V um espaço vetorial
Aula Exemplos diversos. Exemplo 1
 Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
Aula 31 Funções vetoriais de uma variável real
 MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
Aula 18 Cilindros quádricos e identificação de quádricas
 MÓDULO 2 - AULA 18 Aula 18 Cilindros quádricos e identificação de quádricas Objetivos Estudar os cilindros quádricos, analisando suas seções planas paralelas aos planos coordenados e estabelecendo suas
MÓDULO 2 - AULA 18 Aula 18 Cilindros quádricos e identificação de quádricas Objetivos Estudar os cilindros quádricos, analisando suas seções planas paralelas aos planos coordenados e estabelecendo suas
SECÇÕES CÔNICAS E SUPERFÍCIES QUÁDRICAS Prof. Vasco Ricardo Aquino da Silva
 SECÇÕES CÔNICAS E SUPERFÍCIES QUÁDRICAS Prof. Vasco Ricardo Aquino da Silva SECÇÕES CÔNICAS Usando o programa winplot visualize as cônicas disponíveis em nosso AVA Moodle. 1. Elementos da Elipse: F1, F2:
SECÇÕES CÔNICAS E SUPERFÍCIES QUÁDRICAS Prof. Vasco Ricardo Aquino da Silva SECÇÕES CÔNICAS Usando o programa winplot visualize as cônicas disponíveis em nosso AVA Moodle. 1. Elementos da Elipse: F1, F2:
Equação Geral do Segundo Grau em R 2
 8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
Geometria Analítica II - Aula 7 178
 Geometria Analítica II - Aula 7 178 Aula 8 Superfícies Regradas Dizemos que uma superfície S é regrada quando por todo ponto P pertencente a S passa pelo menos uma reta r P inteiramente contida em S. Fig.
Geometria Analítica II - Aula 7 178 Aula 8 Superfícies Regradas Dizemos que uma superfície S é regrada quando por todo ponto P pertencente a S passa pelo menos uma reta r P inteiramente contida em S. Fig.
MAT Poli Roteiro de Estudos sobre as Cônicas
 MAT25 - Poli - 2003 Roteiro de Estudos sobre as Cônicas Martha Salerno Monteiro Departamento de Matemática IME-USP Uma equação quadrática em duas variáveis é uma equação da forma a + by 2 + cxy + dx +
MAT25 - Poli - 2003 Roteiro de Estudos sobre as Cônicas Martha Salerno Monteiro Departamento de Matemática IME-USP Uma equação quadrática em duas variáveis é uma equação da forma a + by 2 + cxy + dx +
A primeira coisa a fazer é saber quais são as equações das curvas quando elas já se encontram na melhor
 Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Dizemos que uma superfície é um cilindro se na equação cartesiana da superfície há uma variável que não aparece.
 Aula 9 Cilindros e Quádricas Cilindros Dizemos que uma superfície é um cilindro se na equação cartesiana da superfície há uma variável que não aparece. Exemplo 1. x 2 + y 2 = 1 No espaço, o conjunto de
Aula 9 Cilindros e Quádricas Cilindros Dizemos que uma superfície é um cilindro se na equação cartesiana da superfície há uma variável que não aparece. Exemplo 1. x 2 + y 2 = 1 No espaço, o conjunto de
Adriano Pedreira Cattai
 Adriano Pedreira Cattai apcattai@ahoo.com.br Universidade Federal da Bahia UFBA, MAT A01, 006. 1. Discussão da equação de uma superfície. Construção de uma superfície 1.1 Introdução Definição de Superfície
Adriano Pedreira Cattai apcattai@ahoo.com.br Universidade Federal da Bahia UFBA, MAT A01, 006. 1. Discussão da equação de uma superfície. Construção de uma superfície 1.1 Introdução Definição de Superfície
Portal OBMEP. Material Teórico - Módulo Cônicas. Terceiro Ano do Ensino Médio
 Material Teórico - Módulo Cônicas Parábolas Terceiro Ano do Ensino Médio Autor: Prof. Fabrício Siqueira Benevides Revisor: Prof. Antonio Caminha M. Neto 1 Introdução ω Nesta aula vamos revisar o conceito
Material Teórico - Módulo Cônicas Parábolas Terceiro Ano do Ensino Médio Autor: Prof. Fabrício Siqueira Benevides Revisor: Prof. Antonio Caminha M. Neto 1 Introdução ω Nesta aula vamos revisar o conceito
Geometria Analítica II - Aula 5 108
 Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
4.1 Superfície Cilíndrica
 4. SUPERFÍCIES QUÁDRICAS CÁLCULO VETORIAL - 2017.2 4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana,
4. SUPERFÍCIES QUÁDRICAS CÁLCULO VETORIAL - 2017.2 4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana,
c) F( 4, 2) r : 2x+y = 3 c) a = 3 F 1 = (0,0) F 2 = (1,1)
 F( 4, 2) r : 2x+y = 3 c) a = 3 F 1 = (0,0) F 2 = (1,1)") Lista de Exercícios Estudo Analítico das Cônicas e Quádricas 1. Determine o foco, o vértice, o parâmetro e a diretriz da parábola P e faça um esboço. a) P : y 2 = 4x b) P : y 2 +8x = 0 c) P : x 2 +6y =
Lista de Exercícios Estudo Analítico das Cônicas e Quádricas 1. Determine o foco, o vértice, o parâmetro e a diretriz da parábola P e faça um esboço. a) P : y 2 = 4x b) P : y 2 +8x = 0 c) P : x 2 +6y =
Geometria Analítica I
 Geom. Analítica I Respostas do Módulo I - Aula 11 1 Geometria Analítica I 10/05/011 Respostas dos Exercícios do Módulo I - Aula 11 Aula 11 1. Em todos os itens desta questão, utilizaremos as relações x
Geom. Analítica I Respostas do Módulo I - Aula 11 1 Geometria Analítica I 10/05/011 Respostas dos Exercícios do Módulo I - Aula 11 Aula 11 1. Em todos os itens desta questão, utilizaremos as relações x
c) F( 4, 2) r : 2x+y = 3 c) a = 3 F 1 = (0,0) F 2 = (1,1)
 F( 4, 2) r : 2x+y = 3 c) a = 3 F 1 = (0,0) F 2 = (1,1)") Lista de Exercícios Estudo Analítico das Cônicas e Quádricas 1. Determine o foco, o vértice, o parâmetro e a diretriz da parábola P e faça um esboço. a) P : y 2 = 4x b) P : y 2 +8x = 0 c) P : x 2 +6y =
Lista de Exercícios Estudo Analítico das Cônicas e Quádricas 1. Determine o foco, o vértice, o parâmetro e a diretriz da parábola P e faça um esboço. a) P : y 2 = 4x b) P : y 2 +8x = 0 c) P : x 2 +6y =
GAAL - Terceira Prova - 15/junho/2013. Questão 1: Analise se a afirmação abaixo é falsa ou verdadeira:
 GAAL - Terceira Prova - /junho/3 SOLUÇÕES Questão : Analise se a afirmação abaio é falsa ou verdadeira: [ A matriz A é diagonalizável SOLUÇÃO: Sabemos que uma matriz n n é diagonalizável se ela possuir
GAAL - Terceira Prova - /junho/3 SOLUÇÕES Questão : Analise se a afirmação abaio é falsa ou verdadeira: [ A matriz A é diagonalizável SOLUÇÃO: Sabemos que uma matriz n n é diagonalizável se ela possuir
d{p, s) = R. Mas, d(p, s) = d(p, Q), onde Q(0, 0, z). Logo, P{x, y, z) pertence ao cilindro se, e somente se,
 = R. Mas, d(p, s) = d(p, Q), onde Q(0, 0, z). Logo, P{x, y, z) pertence ao cilindro se, e somente se,") 134 Geometria Analítica \ Vamos deduzir uma equação do cilindro, em relação a um sistema de coordenadas que contém s como eixo z. Seja R a distância entre r es. Então, um ponto P(x, y, z) pertence ao cilindro
134 Geometria Analítica \ Vamos deduzir uma equação do cilindro, em relação a um sistema de coordenadas que contém s como eixo z. Seja R a distância entre r es. Então, um ponto P(x, y, z) pertence ao cilindro
PARTE III CÔNICAS CONTEÚDOS. Transformações de coordenadas. Translação dos eixos coordenados Rotação dos eixos coordenados. Lugares geométricos
 PARTE III CÔNICAS CONTEÚDOS Transformações de coordenadas Translação dos eios coordenados Rotação dos eios coordenados Lugares geométricos Cônicas Parábola Elipse Hipérbole Equação geral Equações paramétricas
PARTE III CÔNICAS CONTEÚDOS Transformações de coordenadas Translação dos eios coordenados Rotação dos eios coordenados Lugares geométricos Cônicas Parábola Elipse Hipérbole Equação geral Equações paramétricas
Universidade Tecnológica Federal do Paraná Câmpus Campo Mourão Departamento de Matemática
 Universidade Tecnológica Federal do Paraná Câmpus Campo Mourão Departamento de Matemática GAX1 - Geometria Analítica e Álgebra Linear Lista de Exercícios: Estudo Analítico de Cônicas e Quádricas Prof.
Universidade Tecnológica Federal do Paraná Câmpus Campo Mourão Departamento de Matemática GAX1 - Geometria Analítica e Álgebra Linear Lista de Exercícios: Estudo Analítico de Cônicas e Quádricas Prof.
Exercícios Resolvidos Esboço e Análise de Conjuntos
 Instituto uperior Técnico Departamento de Matemática ecção de Álgebra e Análise Eercícios Resolvidos Esboço e Análise de Conjuntos Eercício Esboce detalhadamente o conjunto descrito por = {(,, ) R 3 :,,
Instituto uperior Técnico Departamento de Matemática ecção de Álgebra e Análise Eercícios Resolvidos Esboço e Análise de Conjuntos Eercício Esboce detalhadamente o conjunto descrito por = {(,, ) R 3 :,,
MAT CÁLCULO 2 PARA ECONOMIA. Geometria Analítica
 MT0146 - CÁLCULO PR ECONOMI SEMESTRE DE 016 LIST DE PROBLEMS Geometria nalítica 1) Sejam π 1 e π os planos de equações, respectivamente, x + y + z = e x y + z = 1. Seja r a reta formada pela interseção
MT0146 - CÁLCULO PR ECONOMI SEMESTRE DE 016 LIST DE PROBLEMS Geometria nalítica 1) Sejam π 1 e π os planos de equações, respectivamente, x + y + z = e x y + z = 1. Seja r a reta formada pela interseção
Aula 15 Superfícies quádricas - cones quádricos
 Aula 15 Superfícies quádricas - cones quádricos MÓDULO - AULA 15 Objetivos Definir e estudar os cones quádricos identificando suas seções planas. Analisar os cones quádricos regrados e de revolução. Cones
Aula 15 Superfícies quádricas - cones quádricos MÓDULO - AULA 15 Objetivos Definir e estudar os cones quádricos identificando suas seções planas. Analisar os cones quádricos regrados e de revolução. Cones
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
Material Teórico - Módulo Cônicas. Elipses. Terceiro Ano do Ensino Médio
 Material Teórico - Módulo Cônicas Elipses Terceiro Ano do Ensino Médio Autor: Prof. Fabrício Siqueira Benevides Revisor: Prof. Antonio Caminha M. Neto 1 Introdução Conforme mencionamos na primeira aula
Material Teórico - Módulo Cônicas Elipses Terceiro Ano do Ensino Médio Autor: Prof. Fabrício Siqueira Benevides Revisor: Prof. Antonio Caminha M. Neto 1 Introdução Conforme mencionamos na primeira aula
5.1 Sobre parametrização de curvas no plano e no espaço
 Capítulo 5 Cônicas e Quádricas As cônicas são casos especiais de curvas e as quádricas, casos especiais de superfícies. Ambos podem ser apresentados parametricamente ou implicitamente. Vamos introduzir
Capítulo 5 Cônicas e Quádricas As cônicas são casos especiais de curvas e as quádricas, casos especiais de superfícies. Ambos podem ser apresentados parametricamente ou implicitamente. Vamos introduzir
Aula 9 Cônicas - Rotação de sistemas de coordenadas
 MÓDULO 1 - AULA 9 Aula 9 Cônicas - Rotação de sistemas de coordenadas Objetivos Entender mudanças de coordenadas por rotações. Identificar uma cônica rotacionada a partir da sua equação geral. Identificar
MÓDULO 1 - AULA 9 Aula 9 Cônicas - Rotação de sistemas de coordenadas Objetivos Entender mudanças de coordenadas por rotações. Identificar uma cônica rotacionada a partir da sua equação geral. Identificar
3. Algumas classes especiais de superfícies
 3. ALGUMAS CLASSES ESPECIAIS DE SUPERFÍCIES 77 3. Algumas classes especiais de superfícies Nesta secção descrevemos algumas das classes de superfícies mais simples. Superfícies quádricas As superfícies
3. ALGUMAS CLASSES ESPECIAIS DE SUPERFÍCIES 77 3. Algumas classes especiais de superfícies Nesta secção descrevemos algumas das classes de superfícies mais simples. Superfícies quádricas As superfícies
4.1 Superfície Cilíndrica
 4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana, denominada diretriz, paralelamente a uma reta
4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana, denominada diretriz, paralelamente a uma reta
A B C A 1 B 1 C 1 A 2 B 2 C 2 é zero (exceto o caso em que as tres retas são paralelas).
.") MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
Ricardo Bianconi. Fevereiro de 2015
 Seções Cônicas Ricardo Bianconi Fevereiro de 2015 Uma parte importante da Geometria Analítica é o estudo das curvas planas e, em particular, das cônicas. Neste texto estudamos algumas propriedades das
Seções Cônicas Ricardo Bianconi Fevereiro de 2015 Uma parte importante da Geometria Analítica é o estudo das curvas planas e, em particular, das cônicas. Neste texto estudamos algumas propriedades das
Geometria Analítica II - Aula
 Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
6.1 equações canônicas de círculos e esferas
 6 C Í R C U LO S E E S F E R A S 6.1 equações canônicas de círculos e esferas Um círculo é o conjunto de pontos no plano que estão a uma certa distância r de um ponto dado (a, b). Desta forma temos que
6 C Í R C U LO S E E S F E R A S 6.1 equações canônicas de círculos e esferas Um círculo é o conjunto de pontos no plano que estão a uma certa distância r de um ponto dado (a, b). Desta forma temos que
Matemática. Resolução das atividades complementares. M21 Geometria Analítica: Cônicas
 Resolução das atividades complementares Matemática M Geometria Analítica: Cônicas p. FGV-SP) Determine a equação da elipse de centro na origem que passa pelos pontos A, 0), B, 0) e C0, ). O centro da elipse
Resolução das atividades complementares Matemática M Geometria Analítica: Cônicas p. FGV-SP) Determine a equação da elipse de centro na origem que passa pelos pontos A, 0), B, 0) e C0, ). O centro da elipse
Universidade Federal da Bahia
 Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA3 - CÁLCULO B UNIDADE II - LISTA DE EXERCÍCIOS Atualiada 13.1 Coordenadas Polares [1] Dados os pontos P 1 (3, 5π 3 ), P ( 3, 33 ),
Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA3 - CÁLCULO B UNIDADE II - LISTA DE EXERCÍCIOS Atualiada 13.1 Coordenadas Polares [1] Dados os pontos P 1 (3, 5π 3 ), P ( 3, 33 ),
Descrevendo Regiões no Plano Cartesiano e no Espaço Euclidiano
 Descrevendo Regiões no Plano Cartesiano e no Espaço Euclidiano Americo Cunha Débora Mondaini Ricardo Sá Earp Departamento de Matemática Pontifícia Universidade Católica do Rio de Janeiro Regiões no Plano
Descrevendo Regiões no Plano Cartesiano e no Espaço Euclidiano Americo Cunha Débora Mondaini Ricardo Sá Earp Departamento de Matemática Pontifícia Universidade Católica do Rio de Janeiro Regiões no Plano
Resolução dos Exercícios sobre Derivadas
 Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva = 0 e = y = nos pontos onde Vamos determinar a reta tangente à curva y = nos pontos
Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva = 0 e = y = nos pontos onde Vamos determinar a reta tangente à curva y = nos pontos
Cálculo 2. Guia de Estudos P1
 Cálculo 2 Guia de Estudos P1 Resuminho Teórico e Fórmulas Parte 1 Cônicas Conceito: Cônicas são formas desenhadas em duas dimensões, considerando apenas os eixos x (horizontal) e y (vertical). Tipos de
Cálculo 2 Guia de Estudos P1 Resuminho Teórico e Fórmulas Parte 1 Cônicas Conceito: Cônicas são formas desenhadas em duas dimensões, considerando apenas os eixos x (horizontal) e y (vertical). Tipos de
MÓDULO 1 - AULA 21. Objetivos
 Aula 1 Hipérbole - continuação Objetivos Aprender a desenhar a hipérbole com compasso e régua com escala. Determinar a equação reduzida da hipérbole no sistema de coordenadas com origem no ponto médio
Aula 1 Hipérbole - continuação Objetivos Aprender a desenhar a hipérbole com compasso e régua com escala. Determinar a equação reduzida da hipérbole no sistema de coordenadas com origem no ponto médio
Aula 19 Elipse - continuação
 MÓDULO 1 - AULA 19 Aula 19 Elipse - continuação Objetivos Desenhar a elipse com compasso e régua com escala. Determinar a equação reduzida da elipse no sistema de coordenadas com origem no ponto médio
MÓDULO 1 - AULA 19 Aula 19 Elipse - continuação Objetivos Desenhar a elipse com compasso e régua com escala. Determinar a equação reduzida da elipse no sistema de coordenadas com origem no ponto médio
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
7. f(x,y,z) = y + 25 x 2 y 2 z f(x,y,z) = f : D R 2 R (x,y) z = f(x,y) = x 2 + y 2
 = y + 25 x 2 y 2 z f(x,y,z) = f : D R 2 R (x,y) z = f(x,y) = x 2 + y 2") Lista Cálculo II -B- 007- Universidade Federal Fluminense EGM - Instituto de Matemática GMA - Departamento de Matemática Aplicada LISTA - 007- Domínio, curva de nível e gráfico de função real de duas variáveis
Lista Cálculo II -B- 007- Universidade Federal Fluminense EGM - Instituto de Matemática GMA - Departamento de Matemática Aplicada LISTA - 007- Domínio, curva de nível e gráfico de função real de duas variáveis
Aula 10 Regiões e inequações no plano
 MÓDULO 1 - AULA 10 Aula 10 Regiões e inequações no plano Objetivos Resolver inequações do segundo grau. Analisar sistemas envolvendo inequações do primeiro e segundo graus. Resolver inequações modulares
MÓDULO 1 - AULA 10 Aula 10 Regiões e inequações no plano Objetivos Resolver inequações do segundo grau. Analisar sistemas envolvendo inequações do primeiro e segundo graus. Resolver inequações modulares
CURVAS PLANAS. A orientação de uma curva parametrizada é a direção definida pelos valores crescentes de t.
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA DISCIPLINA: TÓPICOS EM MATEMÁTICA APLICADOS À EXPRESSÃO GRÁFICA II PROFESSORA: BÁRBARA DE
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE EXPRESSÃO GRÁFICA DISCIPLINA: TÓPICOS EM MATEMÁTICA APLICADOS À EXPRESSÃO GRÁFICA II PROFESSORA: BÁRBARA DE
3. Achar a equação da esfera definida pelas seguintes condições: centro C( 4, 2, 3) e tangente ao plano π : x y 2z + 7 = 0.
 e tangente ao plano π : x y 2z + 7 = 0.") Universidade Federal de Uerlândia Faculdade de Matemática Disciplina : Geometria Analítica (GMA00) Assunto: Superfícies, Quádricas, Curvas e Coordenadas Professor Sato 4 a Lista de exercícios. Determinar
Universidade Federal de Uerlândia Faculdade de Matemática Disciplina : Geometria Analítica (GMA00) Assunto: Superfícies, Quádricas, Curvas e Coordenadas Professor Sato 4 a Lista de exercícios. Determinar
Construções de Dandelin
 Capítulo 7 Construções de Dandelin Na introdução às cônicas como secções planas do cone, referimo-nos às construções de Dandelin. Vamos apresentar estas construções para demonstrar as propriedades da elipse,
Capítulo 7 Construções de Dandelin Na introdução às cônicas como secções planas do cone, referimo-nos às construções de Dandelin. Vamos apresentar estas construções para demonstrar as propriedades da elipse,
Aula 8 Cônicas - Translação de sistemas de coordenadas
 Aula 8 Cônicas - Translação de sistemas de coordenadas MÓDULO 1 - AULA 8 Objetivos Entender a mudança de coordenadas pela translação do sistema cartesiano. Identificar uma cônica transladada a partir da
Aula 8 Cônicas - Translação de sistemas de coordenadas MÓDULO 1 - AULA 8 Objetivos Entender a mudança de coordenadas pela translação do sistema cartesiano. Identificar uma cônica transladada a partir da
Exercícios Resolvidos Variedades
 Instituto Superior Técnico Departamento de atemática Secção de Álgebra e Análise Eercícios Resolvidos Variedades Eercício 1 Considere o conjunto = {(,, ) R : + = 1 ; 0 < < 1}. ostre que é uma variedade,
Instituto Superior Técnico Departamento de atemática Secção de Álgebra e Análise Eercícios Resolvidos Variedades Eercício 1 Considere o conjunto = {(,, ) R : + = 1 ; 0 < < 1}. ostre que é uma variedade,
NOTAS DE AULA. Cláudio Martins Mendes
 NOTAS DE AULA TRANSFORMAÇÕES Cláudio Martins Mendes Segundo Semestre de 2005 Sumário 1 Transformações 2 1.1 Transformações................................... 2 1.1.1 Campos Vetoriais..............................
NOTAS DE AULA TRANSFORMAÇÕES Cláudio Martins Mendes Segundo Semestre de 2005 Sumário 1 Transformações 2 1.1 Transformações................................... 2 1.1.1 Campos Vetoriais..............................
Obter as equações paramétricas das cônicas.
 MÓDULO 1 - AULA 1 Aula 1 Equações paramétricas das cônicas Objetivo Obter as equações paramétricas das cônicas. Estudando as retas no plano, você viu que a reta s, determinada pelos pontos P = (x 1, y
MÓDULO 1 - AULA 1 Aula 1 Equações paramétricas das cônicas Objetivo Obter as equações paramétricas das cônicas. Estudando as retas no plano, você viu que a reta s, determinada pelos pontos P = (x 1, y
Superfícies Quádricas
 Superfícies Quádricas Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Superfícies de Revolução São superfícies criadas pela rotação
Superfícies Quádricas Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Superfícies de Revolução São superfícies criadas pela rotação
Formas Quádricas Cônicas hlcs
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORE Formas Quádricas Cônicas hlcs Álgebra Linear A equação mais geral de uma cônica é a seguinte: Q(,)= a + b + c +d + e +f =,...() onde a,b,c,d,e,f são números reais
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORE Formas Quádricas Cônicas hlcs Álgebra Linear A equação mais geral de uma cônica é a seguinte: Q(,)= a + b + c +d + e +f =,...() onde a,b,c,d,e,f são números reais
Álgebra Linear e Geometria Anaĺıtica. Cónicas e Quádricas
 universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 6 Cónicas e Quádricas Equação geral de uma cónica [6 01] As cónicas são curvas
universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 6 Cónicas e Quádricas Equação geral de uma cónica [6 01] As cónicas são curvas
Exercícios de Geometria Analítica - Prof. Ademir
 Exercícios de Geometria nalítica - Prof. demir Vetores 1. onsidere o triângulo, onde = (1, 1, 1), = (2, 1, 0) e = (3, 2, 3). Verifique que este triângulo é retângulo, diga qual vértice contém o ângulo
Exercícios de Geometria nalítica - Prof. demir Vetores 1. onsidere o triângulo, onde = (1, 1, 1), = (2, 1, 0) e = (3, 2, 3). Verifique que este triângulo é retângulo, diga qual vértice contém o ângulo
MAT 105- Lista de Exercícios
 1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
3.1 Funções Reais de Várias Variáveis Reais
 CAPÍTULO 3 FUNÇÕES REAIS DE VÁRIAS VARIÁVEIS REAIS 3. Funções Reais de Várias Variáveis Reais Vamos agora tratar do segundo caso particular de funções F : Dom(F) R n R m, que são as funções reais de várias
CAPÍTULO 3 FUNÇÕES REAIS DE VÁRIAS VARIÁVEIS REAIS 3. Funções Reais de Várias Variáveis Reais Vamos agora tratar do segundo caso particular de funções F : Dom(F) R n R m, que são as funções reais de várias
G4 de Álgebra Linear I
 G4 de Álgebra Linear I 27.1 Gabarito 1) Considere a base η de R 3 η = {(1, 1, 1); (1,, 1); (2, 1, )} (1.a) Determine a matriz de mudança de coordenadas da base canônica para a base η. (1.b) Considere o
G4 de Álgebra Linear I 27.1 Gabarito 1) Considere a base η de R 3 η = {(1, 1, 1); (1,, 1); (2, 1, )} (1.a) Determine a matriz de mudança de coordenadas da base canônica para a base η. (1.b) Considere o
MAT Cálculo II - POLI
 MAT25 - Cálculo II - POLI Primeira Lista de Exercícios - 2006 TAYLOR 1. Utilizando o polinômio de Taylor de ordem 2, calcule um valor aproximado e avalie o erro: (a) 3 8, 2 (b) ln(1, 3) (c) sen (0, 1)
MAT25 - Cálculo II - POLI Primeira Lista de Exercícios - 2006 TAYLOR 1. Utilizando o polinômio de Taylor de ordem 2, calcule um valor aproximado e avalie o erro: (a) 3 8, 2 (b) ln(1, 3) (c) sen (0, 1)
Cálculo II. Resumo Teórico Completo
 Cálculo II Resumo Teórico Completo Cálculo 2 A disciplina visa estudar funções e gráficos, de forma semelhante a Cálculo 1, mas expande o estudo para funções de mais de uma variável, bem como gráficos
Cálculo II Resumo Teórico Completo Cálculo 2 A disciplina visa estudar funções e gráficos, de forma semelhante a Cálculo 1, mas expande o estudo para funções de mais de uma variável, bem como gráficos
Matrizes Semelhantes e Matrizes Diagonalizáveis
 Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Respostas dos Exercícios de Fixação
 Respostas dos Eercícios de Fiação Capítulo 1 1.1) ac + ab + bc = 1.) p = 14 64 9 87 1.7) P =,,Q =, 49 49 49 49 1.8) u+ v = 6 ma 1.10) ( 4b, b ) 1.17) Área =.( AB + BC ).( BC + CD) 1 Última Atualização:
Respostas dos Eercícios de Fiação Capítulo 1 1.1) ac + ab + bc = 1.) p = 14 64 9 87 1.7) P =,,Q =, 49 49 49 49 1.8) u+ v = 6 ma 1.10) ( 4b, b ) 1.17) Área =.( AB + BC ).( BC + CD) 1 Última Atualização:
Geometria Analítica. Cônicas. Prof. Vilma Karsburg
 Geometria Analítica Cônicas Prof. Vilma Karsburg Cônicas Sejam duas retas e e g concorrentes em O e não perpendiculares. Considere e fixa e g girar 360 em torno de e, mantendo constante o ângulo entre
Geometria Analítica Cônicas Prof. Vilma Karsburg Cônicas Sejam duas retas e e g concorrentes em O e não perpendiculares. Considere e fixa e g girar 360 em torno de e, mantendo constante o ângulo entre
0 < c < a ; d(f 1, F 2 ) = 2c
 = 2c") Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Matemática I Cálculo I Unidade B - Cônicas. Profª Msc. Débora Bastos. IFRS Campus Rio Grande FURG UNIVERSIDADE FEDERAL DO RIO GRANDE
 Unidade B - Cônicas Profª Msc. Débora Bastos IFRS Campus Rio Grande FURG UNIVERSIDADE FEDERAL DO RIO GRANDE 22 12. Cônicas São chamadas cônicas as curvas resultantes do corte de um cone duplo com um plano.
Unidade B - Cônicas Profª Msc. Débora Bastos IFRS Campus Rio Grande FURG UNIVERSIDADE FEDERAL DO RIO GRANDE 22 12. Cônicas São chamadas cônicas as curvas resultantes do corte de um cone duplo com um plano.
Cálculo a Várias Variáveis I - MAT Cronograma para P2: aulas teóricas (segundas e quartas)
") Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Equações paramétricas das cônicas
 Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Questão 2: Considere a hipérbole descrita pela equação 9x 2 16y 2 = 144. vértices, focos e esboce seu gráco.
 Ministério da Educação Universidade Tecnológica Federal do Paraná Campus Curitiba - DAMAT MA71B - Geometria Analítica e Álgebra Linear Prof a Dr a Diane Rizzotto Rossetto LISTA 8 - Cônicas e Quádricas
Ministério da Educação Universidade Tecnológica Federal do Paraná Campus Curitiba - DAMAT MA71B - Geometria Analítica e Álgebra Linear Prof a Dr a Diane Rizzotto Rossetto LISTA 8 - Cônicas e Quádricas
Superfícies Parametrizadas
 Universidade Estadual de Maringá - epartamento de Matemática Cálculo iferencial e Integral: um KIT de Sobrevivência c Publicação eletrônica do KIT http://www.dma.uem.br/kit Superfícies Parametrizadas Prof.
Universidade Estadual de Maringá - epartamento de Matemática Cálculo iferencial e Integral: um KIT de Sobrevivência c Publicação eletrônica do KIT http://www.dma.uem.br/kit Superfícies Parametrizadas Prof.
Aula 4. Coordenadas polares. Definição 1. Observação 1
 Aula Coordenadas polares Nesta aula veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana Embora os sistemas cartesianos sejam muito utilizados, há curvas
Aula Coordenadas polares Nesta aula veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana Embora os sistemas cartesianos sejam muito utilizados, há curvas
x 2 a 2 + y2 c 2 = 1, b 2 + z2 Esta superfície é simétrica relativamente a cada um dos planos coordenados e relativamente
 Capítulo 2 Cálculo integral 2.1 Superfícies quádricas Uma superfície quádrica é um subconjunto de R 3 constituído por todos os pontos de R 3 que satisfazem uma equação com a forma A + B + Cz 2 + Dxy +
Capítulo 2 Cálculo integral 2.1 Superfícies quádricas Uma superfície quádrica é um subconjunto de R 3 constituído por todos os pontos de R 3 que satisfazem uma equação com a forma A + B + Cz 2 + Dxy +
GAAL - Exame Especial - 12/julho/2013. Questão 1: Considere os pontos A = (1, 2, 3), B = (2, 3, 1), C = (3, 1, 2) e D = (2, 2, 1).
, B = (2, 3, 1), C = (3, 1, 2) e D = (2, 2, 1).") GAAL - Exame Especial - /julho/3 SOLUÇÕES Questão : Considere os pontos A = (,, 3), B = (, 3, ), C = (3,, ) e D = (,, ) (a) Chame de α o plano que passa pelos pontos A, B e C e de β o plano que passa pelos
GAAL - Exame Especial - /julho/3 SOLUÇÕES Questão : Considere os pontos A = (,, 3), B = (, 3, ), C = (3,, ) e D = (,, ) (a) Chame de α o plano que passa pelos pontos A, B e C e de β o plano que passa pelos
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
Geometria Analítica. Números Reais. Faremos, neste capítulo, uma rápida apresentação dos números reais e suas propriedades, mas no sentido
 Módulo 2 Geometria Analítica Números Reais Conjuntos Numéricos Números naturais O conjunto 1,2,3,... é denominado conjunto dos números naturais. Números inteiros O conjunto...,3,2,1,0,1, 2,3,... é denominado
Módulo 2 Geometria Analítica Números Reais Conjuntos Numéricos Números naturais O conjunto 1,2,3,... é denominado conjunto dos números naturais. Números inteiros O conjunto...,3,2,1,0,1, 2,3,... é denominado
Geometria Analítica II - Aula 4 82
 Geometria Analítica II - Aula 4 8 IM-UFF K. Frensel - J. Delgado Aula 5 Esferas Iniciaremos o nosso estudo sobre superfícies com a esfera, que já nos é familiar. A esfera S de centro no ponto A e raio
Geometria Analítica II - Aula 4 8 IM-UFF K. Frensel - J. Delgado Aula 5 Esferas Iniciaremos o nosso estudo sobre superfícies com a esfera, que já nos é familiar. A esfera S de centro no ponto A e raio
ÁLGEBRA 1. Departamento de Matemática UDESC - Joinville
 ÁLGEBRA 1 Departamento de Matemática UDESC - Joinville Conteúdo 1 CURVAS 3 1.1 Cilindros projetantes de uma curva............................ 3 1.1.1 Exemplo....................................... 4 1.
ÁLGEBRA 1 Departamento de Matemática UDESC - Joinville Conteúdo 1 CURVAS 3 1.1 Cilindros projetantes de uma curva............................ 3 1.1.1 Exemplo....................................... 4 1.
Cilindros projetantes de uma curva
 Cilindros projetantes de uma curva Dada uma curva C no espaço é possível obter tres cilindros retos cujas interseções fornecem a curva C. Estes cilindros são obtidos projetando-se a curva em cada um dos
Cilindros projetantes de uma curva Dada uma curva C no espaço é possível obter tres cilindros retos cujas interseções fornecem a curva C. Estes cilindros são obtidos projetando-se a curva em cada um dos
(b) A não será diagonalizável sobre C e A será diagonalizável sobre R se, e
 A não será diagonalizável sobre C e A será diagonalizável sobre R se, e") Q1. Sejam A M 6 (R) uma matriz real e T : R 6 R 6 o operador linear tal que [T ] can = A, em que can denota a base canônica de R 6. Se o polinômio característico de T for então poderemos afirmar que: p
Q1. Sejam A M 6 (R) uma matriz real e T : R 6 R 6 o operador linear tal que [T ] can = A, em que can denota a base canônica de R 6. Se o polinômio característico de T for então poderemos afirmar que: p
Matemática B Extensivo v. 8
 Matemática B Etensivo v. 8 Eercícios y = Eio real = a = a = C = A + B ( = ( + B B = a y b = D C y = y = 6 9 Daí, a = 6 e b = 9 c = a + b c = 9 + 6 c = c = c = Portanto, a distância focal é dada por: c
Matemática B Etensivo v. 8 Eercícios y = Eio real = a = a = C = A + B ( = ( + B B = a y b = D C y = y = 6 9 Daí, a = 6 e b = 9 c = a + b c = 9 + 6 c = c = c = Portanto, a distância focal é dada por: c
PLANO DE ENSINO IDENTIFICAÇÃO DA DISCIPLINA
 1 PLANO DE ENSINO IDENTIFICAÇÃO DA DISCIPLINA Curso: CST em Sistemas de Telecomunicações, Tecnologia Nome da disciplina: Álgebra Vetorial Código: CEE.002 Carga horária: 67 horas Semestre previsto: 1 Pré-requisito(s):
1 PLANO DE ENSINO IDENTIFICAÇÃO DA DISCIPLINA Curso: CST em Sistemas de Telecomunicações, Tecnologia Nome da disciplina: Álgebra Vetorial Código: CEE.002 Carga horária: 67 horas Semestre previsto: 1 Pré-requisito(s):
Universidade Federal da Bahia
 Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA0 - CÁLCULO B UNIDADE I - LISTA DE EXERCÍCIOS Atualizada 0. Áreas de figuras planas em coordenadas cartesianas [] Determine a área
Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA0 - CÁLCULO B UNIDADE I - LISTA DE EXERCÍCIOS Atualizada 0. Áreas de figuras planas em coordenadas cartesianas [] Determine a área
4. Superfícies e sólidos geométricos
 4. Superfícies e sólidos geométricos Geometria Descritiva 2006/2007 4.1 Classificação das superfícies e sólidos geométricos Geometria Descritiva 2006/2007 1 Classificação das superfícies Linha Lugar das
4. Superfícies e sólidos geométricos Geometria Descritiva 2006/2007 4.1 Classificação das superfícies e sólidos geométricos Geometria Descritiva 2006/2007 1 Classificação das superfícies Linha Lugar das
CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1. CAPÍTULO 2 Sistemas de Coordenadas Retangulares 9. CAPÍTULO 3 Retas 18
 Sumário CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1 Sistema de Coordenadas Lineares 1 Intervalos Finitos 3 Intervalos Infinitos 3 Desigualdades 3 CAPÍTULO 2 Sistemas de
Sumário CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1 Sistema de Coordenadas Lineares 1 Intervalos Finitos 3 Intervalos Infinitos 3 Desigualdades 3 CAPÍTULO 2 Sistemas de
Geometria Analítica. Cônicas. Prof Marcelo Maraschin de Souza
 Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
ELIPSE. Figura 1: Desenho de uma elipse no plano euclidiano (à esquerda). Desenho de uma elipse no plano cartesiano (à direita).
. Desenho de uma elipse no plano cartesiano (à direita).") QUÁDRICAS/CÔNICAS - Cálculo II MAT 147 FEAUSP Segundo semestre de 2018 Professor Oswaldo Rio Branco de Oliveira [ Veja também http://www.ime.usp.br/~oliveira/ele-conicas.pdf] No plano euclidiano consideremos
QUÁDRICAS/CÔNICAS - Cálculo II MAT 147 FEAUSP Segundo semestre de 2018 Professor Oswaldo Rio Branco de Oliveira [ Veja também http://www.ime.usp.br/~oliveira/ele-conicas.pdf] No plano euclidiano consideremos