Processamento de Imagens COS756 / COC603
|
|
|
- João Guilherme Gentil
- 5 Há anos
- Visualizações:
Transcrição
1 Processamento de Imagens COS756 / COC603 aula 13 - Transformada de Hough e SIFT Antonio Oliveira Ricardo Marroquim 1 / 41
2 aula de hoje descritores Transformada de Hough SIFT 2 / 41
 http://www.mathworks.")
3 transformada de Hough objetivo encontrar formas em imagens ex. retas, círculos e elipses (seções cônicas) matlabcentral/fx files/9226/1/ 3 / 41
4 retas definição ou na forma homogênea: y = mx + c Ay + Bx + 1 = 0, onde A = 1 c, B = m c 4 / 41
5 retas definição ou na forma homogênea: y = mx + c Ay + Bx + 1 = 0, onde A = 1 c, B = m c os pontos colineares (x i, y i ) definem a reta (A, B): Ay i + Bx i + 1 = 0, onde A = 1 c, B = m c 4 / 41
6 retas definição ou na forma homogênea: y = mx + c Ay + Bx + 1 = 0, onde A = 1 c, B = m c os pontos colineares (x i, y i ) definem a reta (A, B): Ay i + Bx i + 1 = 0, onde A = 1, B = m c c repare que esta equação tem um caráter dual podemos procurar os pontos (x i, y i ) que pertencem a reta (A, B), ou podemos procurar a reta (A, B) que passa pelos pontos (x, y) 4 / 41
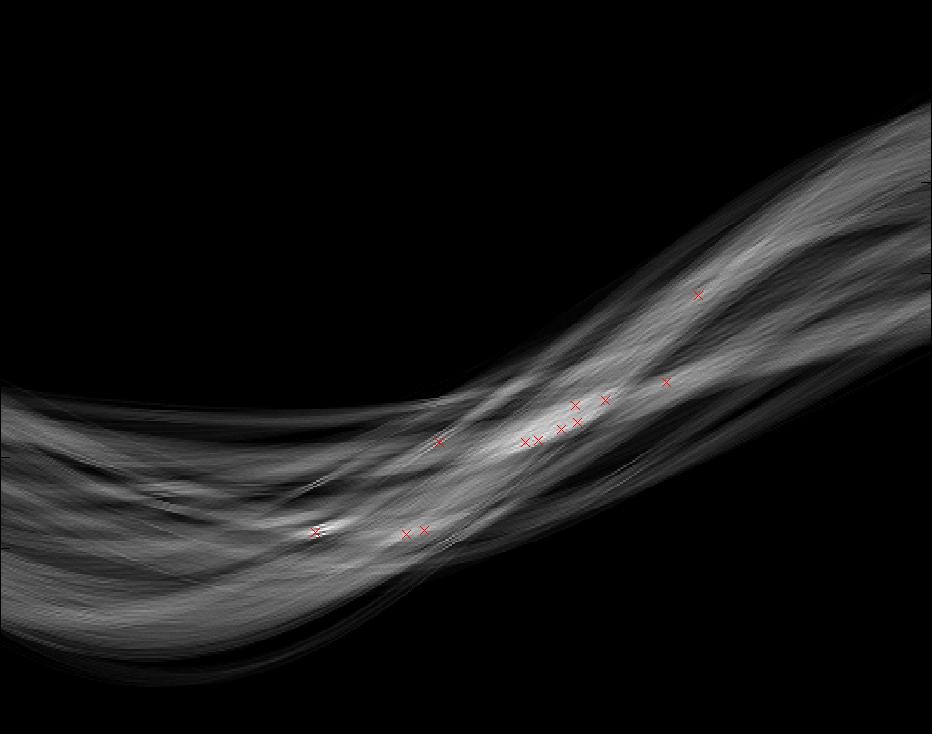
7 retas espaço dual pontos são transformados em retas, e vice-versa todos pontos colineares em uma imagem, definem os pontos de interseção (A, B) no espaço dual transformada de Hough encontra a reta (A, B) rastreando o acumulo das evidências 5 / 41
8 retas votação cada ponto (x i, y i ) forma uma reta U i no espaço dual cada reta U i vota em todos pontos pelos quais ela passa pontos que obtém muitos votos no espaço dual, são os candidatos para serem retas na imagem 6 / 41
9 retas 7 / 41
10 retas problemas 8 / 41
11 retas problemas rasterização das retas no espaço dual pode introduzir erros Bresenham 8 / 41
12 retas problemas rasterização das retas no espaço dual pode introduzir erros Bresenham a parametrização Cartesiana não é muito adequada os parâmetros tem infinitos valores possíveis 8 / 41
13 retas HT polar para retas valores limitados para os parâmetros r = x cos(θ) + y sin(θ) θ [0, π] e r [0, 2N] 9 / 41
14 retas HT polar para retas podemos passar de uma parametrização à outra: m = c = 1 tan θ r sin θ exemplo: quando temos m = 1 e c = 1 temos r = 2 2 e θ = π 4 10 / 41
15 retas HT polar para retas os pontos são mapeados em senoidais a interseção das curvas marca as prováveis retas 11 / 41
16 retas 6.htm 12 / 41
17 retas vantagens complexidade menor do que template matching tolerante aos seguintes fatores: ruído lacunas nas arestas oclusões desvantagens não encontra os extremos das arestas 13 / 41

18 retas 14 / 41

19 retas 15 / 41




20 retas 16 / 41
21 círculos definição forma paramétrica três parâmetros (a, b, r) (x a) 2 + (y b) 2 = r 2 nosso espaço para votação agora está em 3D! cada ponto da imagem no espaço dual gera um cone centrado no ponto representa todos raios possíveis a votação em 3D encontra os círculos da imagem 17 / 41
22 círculos espaço dual todos círculos com raio r no espaço dual intersectam no centro do círculo na imagem (a, b) x = a + r cos θ, y = b + r sin θ 18 / 41
23 círculos 19 / 41
24 curvas GHT Generalized Hough Transform uma forma pode ser representada por uma curva paramétrica v(θ) = (x(θ), y(θ)) precisamos de representação desta curva onde seja possível fazer a votação 20 / 41
25 curvas R-table pré-processamento gera uma tabela que represente a curva indexada pelo ângulo do gradiente (φ) a tabela deve ter entrada para k valores que definem a resolução da amostragem do gradiente 360 k φ i (i = 1...K) 21 / 41
26 curvas R-table escolher um ponto (x c, y c ) no interior da curva (ex. centro gravitacional) para cada ponto da curva (imagem) encontrar dois parâmetros (r, β) inserir na tabela no índice φ mais próximo 22 / 41
27 curvas votação gerar uma imagem H para votação inicializada com zeros H[x c min...x c max][y c min...y c max] para cada ponto da imagem (x, y) com um gradiente significativo G(x, y) > T s encontrar a linha na tabela com φ mais próximo a G(x, y) encontrar o (x c, y c ) correspondente (x c, y c ) = (x + r cos(β), y + r sin(β)) votar: incrementar o valor de H(x c, y c ) encontrar os máximos em H para localizar a curva na imagem 23 / 41
28 curvas escala e rotação até então só encontraremos curvas que foram apenas transladadas e se quisermos encontrar uma forma que pode ter sido rotacionada ou sofrido uma operação de escala? p = t + srp p x = t x + s(p x cos(θ) p y sin(θ)) p y = t y + s(p x sin(θ) + p y cos(θ)) 24 / 41
29 curvas aumentando nosso espaço adicionamos mais parâmetros, nosso espaço H agora está em 4D H[x c min...x c max ][y c min...y c max ][θ min...θ max ][s min...s max ] para cada ponto da imagem, encontramos o par (r, β) (x, y ) = (r cos(β), r sin(β)) e votamos em todas rotações e escalas deste ponto ou seja, para cada par possível de (s i, θ j ) (x c, y c ) = (x + s i (x cos(θ j ) y sin(θ j )), y + s i (x sin(θ j ) + y cos(θ j )) 25 / 41
30 curvas vantagens robusto, tolerante a: pequenas deformações na curva oclusões outras estruturas na imagem (ex. linhas) ruído é possível encontrar múltiplas instâncias do objeto em uma única passada desvantagens requer espaço de armazenamento sensível a erros de discretização alto custo computacional porém, é altamente paralelizável 26 / 41
31 SIFT objetivo encontrar bons pontos para fazer correspondência descritores que sejam invariantes: rotação translação escala ao menos parcialmente a mudanças de iluminação artigos do David Lowe Object Recognition from local-scale-invariant features, 1999 Distinctive Image Features from Scale-Invariant Keypoints, / 41

32 espaço de escala 28 / 41
33 SIFT espaço de escala L(x, y, σ) = G(x, y, σ) I (x, y) variando σ e tirando as diferenças entre os níveis DoG (Difference of Gaussians) D(x, y, σ) = L(x, y, kσ) L(x, y, σ) a operação é repetida sub-amostrando a imagem (diminuindo a resolução) 29 / 41
34 SIFT espaço de escala A = G(σ = (2)) I B = G(σ = (2)) A DoG = B A para o próximo nível da pirâmide, sub-amostra B 30 / 41

35 espaço de escala 31 / 41

36 SIFT máximos e mínimos locais cada ponto é comparado com os 26 vizinhos no espaço de escala 8 vizinhos no mesmo nível, mais 9 no nível acima, mais 9 no nível abaixo se for menor ou maior que todos vizinhos, é marcado como candidato 32 / 41
37 SIFT orientação m(x, y) = (L(x + 1, y) L(x 1, y)) 2 + (L(x, y + 1) L(x, y 1)) 2 ( ) L(x, y + 1) L(x, y 1) θ(x, y) = tan 1 L(x + 1, y) L(x 1, y) histograma com as direções em torno do ponto candidato 36 valores (variação de 10 graus) os máximos no histograma correspondem as orientações principais orientações acima de 80% do máximo também são utilizadas para cada uma o candidato é replicado o máximo é interpolado utilizando uma parábola em torno dos 3 vizinhos mais próximos este passo garante a invariância a rotação, pois o descritor será definido em relação a esta 33 / 41
38 SIFT descritor local cada ponto agora possui posição escala orientação agora precisamos de um descritor que possa distinguir entre esses pontos descritor local abordagem trivial: correlação por templates (NCC) mas vamos ver algo mais esperto 34 / 41
 o vetor é normalizado torna o descritor invariável a mudanças lineares na iluminação 35 /")
39 SIFT descritor local amostragem de todos gradientes em torno do ponto Gaussiana para pesar os gradientes (σ baseado na escala) com 8 direções possíveis acumula gradientes em histogramas para 4x4 regiões gera um vetor de 4x4x8=128 elementos (feature vector) o vetor é normalizado torna o descritor invariável a mudanças lineares na iluminação 35 / 41
40 SIFT correspondência para reconhecimento de objetos, criar uma base com os descritores de cada um para uma nova imagem extrair os descritores comparar com a base (distância Euclidiana) utilizar estrutura de busca espacial para acelerar processo 36 / 41





41 SIFT 37 / 41

42 SIFT 38 / 41
43 SIFT conclusões método muito utilizado comprovação é fortemente baseada em experimentos esta foi uma descrição geral, no artigo muitos detalhes ex. melhores valores para parâmetro ex. tamanho da pirâmide 39 / 41

44 SIFT 40 / 41

45 SIFT 41 / 41
SIFT - Scale Invariant Feature Transform
 SIFT - Scale Invariant Feature Transform Daniel Pinto Coutinho Prof. Ricardo Marroquim 1 Introdução A detecção de pontos de interesse em uma figura é uma tarefa muito comum no campo de processamento de
SIFT - Scale Invariant Feature Transform Daniel Pinto Coutinho Prof. Ricardo Marroquim 1 Introdução A detecção de pontos de interesse em uma figura é uma tarefa muito comum no campo de processamento de
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 09 - curvatura Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection overview curvatura espaço de escala block matching 2 / 1 curvatura o
Processamento de Imagens COS756 / COC603 aula 09 - curvatura Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection overview curvatura espaço de escala block matching 2 / 1 curvatura o
2 SIFT (Scale Invariant Feature Transform)
") SIFT (Scale Invariant Feature Transform) O SIFT é um algoritmo de visão computacional proposto e publicado pelo pesquisador David Lowe (Lowe, 1999), professor do departamento de Ciência da Computação na
SIFT (Scale Invariant Feature Transform) O SIFT é um algoritmo de visão computacional proposto e publicado pelo pesquisador David Lowe (Lowe, 1999), professor do departamento de Ciência da Computação na
Image Descriptors: local features
 Image Descriptors: local features Image Processing scc0251 www.icmc.usp.br/ moacir moacir@icmc.usp.br ICMC/USP São Carlos, SP, Brazil 2011 Moacir Ponti Jr. (ICMCUSP) Image Descriptors: local features 2011
Image Descriptors: local features Image Processing scc0251 www.icmc.usp.br/ moacir moacir@icmc.usp.br ICMC/USP São Carlos, SP, Brazil 2011 Moacir Ponti Jr. (ICMCUSP) Image Descriptors: local features 2011
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 01 - geometria projetiva e transformações 2D Antonio Oliveira Ricardo Marroquim 1 / 44 laboratório de processamento de imagens tópicos geometria projetiva transformações
Processamento de Imagens CPS755 aula 01 - geometria projetiva e transformações 2D Antonio Oliveira Ricardo Marroquim 1 / 44 laboratório de processamento de imagens tópicos geometria projetiva transformações
4 SIFT (Scale Invariant Feature Transform)
") 4 SIFT (Scale Invariant Feature Transform) SIFT é um algoritmo de visão computacional publicado por David Lowe, em 1999 (Lowe, 1999) e patenteado nos EUA pela University of British Columbia. SIFT é composto
4 SIFT (Scale Invariant Feature Transform) SIFT é um algoritmo de visão computacional publicado por David Lowe, em 1999 (Lowe, 1999) e patenteado nos EUA pela University of British Columbia. SIFT é composto
3 Transformação SIFT (Scale Invariant Feature Transform)
") 3 Transformação SIFT (Scale Invariant Feature Transform) Este capítulo apresenta as seguintes seções: - 3.1 Uma Introdução Sobre Descritores Locais: A técnica SIFT ( Scale Invariant Feature Transform )
3 Transformação SIFT (Scale Invariant Feature Transform) Este capítulo apresenta as seguintes seções: - 3.1 Uma Introdução Sobre Descritores Locais: A técnica SIFT ( Scale Invariant Feature Transform )
Aula 5 - Segmentação de Imagens
 Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo
Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 15 - Fluxo Ótico - parte I Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje fluxo ótico estimando movimentos em imagens 2 / 1 motivação para que serve?
Processamento de Imagens COS756 / COC603 aula 15 - Fluxo Ótico - parte I Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje fluxo ótico estimando movimentos em imagens 2 / 1 motivação para que serve?
Descritores de Imagens
 Descritores de Imagens André Tavares da Silva PPGCA/UDESC Outubro de 2017 André Tavares da Silva (PPGCA/UDESC) Descritores de Imagens Outubro de 2017 1 / 18 Descritores Locais e Frameworks SIFT SURF Viola-Jones
Descritores de Imagens André Tavares da Silva PPGCA/UDESC Outubro de 2017 André Tavares da Silva (PPGCA/UDESC) Descritores de Imagens Outubro de 2017 1 / 18 Descritores Locais e Frameworks SIFT SURF Viola-Jones
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 03 - visualizando a planar Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos visualizando a planar discussão dos primeiros 2
Processamento de Imagens CPS755 aula 03 - visualizando a planar Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos visualizando a planar discussão dos primeiros 2
Sistema de Reconhecimento de Logotipos
 Sistema de Reconhecimento de Logotipos Fellipe Duarte, Saulo T. Oliveira {duartefellipe,sto}@cos.ufrj.br Relatório Técnico, Introdução ao Processamento de Imagens Programa de Engenharia de Sistemas e Computação
Sistema de Reconhecimento de Logotipos Fellipe Duarte, Saulo T. Oliveira {duartefellipe,sto}@cos.ufrj.br Relatório Técnico, Introdução ao Processamento de Imagens Programa de Engenharia de Sistemas e Computação
Feature Description (SIFT + SURF) Prof. Dr. Geraldo Braz Junior
 Prof. Dr. Geraldo Braz Junior") Feature Description (SIFT + SURF) Prof. Dr. Geraldo Braz Junior Feature Detection 1. Encontre um conjunto de keypoints 2. Defina uma região ao redor do keypoint 3. Normalize a região 4. Extraia caracterísfcas
Feature Description (SIFT + SURF) Prof. Dr. Geraldo Braz Junior Feature Detection 1. Encontre um conjunto de keypoints 2. Defina uma região ao redor do keypoint 3. Normalize a região 4. Extraia caracterísfcas
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 08 - deteção de características de baixo-nível (low-level feature detection) parte II Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection
Processamento de Imagens COS756 / COC603 aula 08 - deteção de características de baixo-nível (low-level feature detection) parte II Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 07 - deteção de características de baixo-nível (low-level feature detection) Antonio Oliveira Ricardo Marroquim 1 / 35 aula de hoje feature detection overview
Processamento de Imagens COS756 / COC603 aula 07 - deteção de características de baixo-nível (low-level feature detection) Antonio Oliveira Ricardo Marroquim 1 / 35 aula de hoje feature detection overview
2 Trabalhos Relacionados
 2 Trabalhos Relacionados Este capítulo apresenta os algoritmos já existentes que são utilizados nesta dissertação para obter pontos homólogos entre duas imagens de um par estéreo. Pode-se classificar essas
2 Trabalhos Relacionados Este capítulo apresenta os algoritmos já existentes que são utilizados nesta dissertação para obter pontos homólogos entre duas imagens de um par estéreo. Pode-se classificar essas
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 05 - sistemas lineares - parte 2 Antonio Oliveira Ricardo Marroquim 1 / 27 laboratório de processamento de imagens tópicos métodos lineares mínimos quadrados equações
Processamento de Imagens CPS755 aula 05 - sistemas lineares - parte 2 Antonio Oliveira Ricardo Marroquim 1 / 27 laboratório de processamento de imagens tópicos métodos lineares mínimos quadrados equações
Geometria Analítica II - Aula
 Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
MAT 105- Lista de Exercícios
 1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
Equações paramétricas das cônicas
 Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
PMR2560 Visão Computacional Imagens binárias. Prof. Eduardo L. L. Cabral
 PMR2560 Visão Computacional Imagens binárias Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens binárias: Operadores binários; Propriedades geométricas; Múltiplos objetos; Segmentação da imagem.
PMR2560 Visão Computacional Imagens binárias Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens binárias: Operadores binários; Propriedades geométricas; Múltiplos objetos; Segmentação da imagem.
Obtendo Contornos. Prof. Dr. Geraldo Braz Junior
 Obtendo Contornos Prof. Dr. Geraldo Braz Junior Até então Como achar as linhas (contorno) da rodovia? Ou pelo menos, diminuir a quanbdade de bordas? 2 Contorno? Borda não é contorno As Bordas de uma imagem
Obtendo Contornos Prof. Dr. Geraldo Braz Junior Até então Como achar as linhas (contorno) da rodovia? Ou pelo menos, diminuir a quanbdade de bordas? 2 Contorno? Borda não é contorno As Bordas de uma imagem
Transformações geométricas planas
 9 Transformações geométricas planas Sumário 9.1 Introdução....................... 2 9.2 Transformações no plano............... 2 9.3 Transformações lineares................ 5 9.4 Operações com transformações...........
9 Transformações geométricas planas Sumário 9.1 Introdução....................... 2 9.2 Transformações no plano............... 2 9.3 Transformações lineares................ 5 9.4 Operações com transformações...........
Lista 5: Superfícies. (e) x = 4 tan(t) (f) x = (g) x = 1 4 csc(t) y = cosh(2t)
 x = 4 tan(t) (f) x = (g) x = 1 4 csc(t) y = cosh(2t)") 1. Parametrize as seguintes curvas. + = 16 + 5 = 15 = 4 = 16 + 5 + 8 7 = 0 (f) + 4 + 1 + 6 = 0. Lista 5: Superfícies (g) = + (h) + = (i) + = 4 (j) + = 1 (k) 6 + 18 = 0 (l) r = sin(θ). Determine a equação
1. Parametrize as seguintes curvas. + = 16 + 5 = 15 = 4 = 16 + 5 + 8 7 = 0 (f) + 4 + 1 + 6 = 0. Lista 5: Superfícies (g) = + (h) + = (i) + = 4 (j) + = 1 (k) 6 + 18 = 0 (l) r = sin(θ). Determine a equação
A B C A 1 B 1 C 1 A 2 B 2 C 2 é zero (exceto o caso em que as tres retas são paralelas).
.") MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
USO DO DETECTOR DE PONTOS DE INTERESSE SIFT PARA LOCALIZAÇÃO DE ALVOS ARTIFICIAIS DE CONTROLE
 IV Simpósio Brasileiro de Geomática SBG17 II Jornadas Lusófonas - Ciências e Tecnologias de Informação Geográfica - CTIG17 Presidente Prudente - SP, 24-26 de julho de 17 p. 341-346 USO DO DETECTOR DE PONTOS
IV Simpósio Brasileiro de Geomática SBG17 II Jornadas Lusófonas - Ciências e Tecnologias de Informação Geográfica - CTIG17 Presidente Prudente - SP, 24-26 de julho de 17 p. 341-346 USO DO DETECTOR DE PONTOS
Descrevendo Regiões no Plano Cartesiano e no Espaço Euclidiano
 Descrevendo Regiões no Plano Cartesiano e no Espaço Euclidiano Americo Cunha Débora Mondaini Ricardo Sá Earp Departamento de Matemática Pontifícia Universidade Católica do Rio de Janeiro Regiões no Plano
Descrevendo Regiões no Plano Cartesiano e no Espaço Euclidiano Americo Cunha Débora Mondaini Ricardo Sá Earp Departamento de Matemática Pontifícia Universidade Católica do Rio de Janeiro Regiões no Plano
Relatório sobre os Resultados obtidos através do uso dos algoritmos SIFT e RANSAC para Reconstrução de um Objeto a partir de uma Nuvem de Pontos
 Relatório sobre os Resultados obtidos através do uso dos algoritmos SIFT e RANSAC para Reconstrução de um Objeto a partir de uma Nuvem de Pontos Gustavo Moreira PUC-Rio, Departamento de Informática Rua
Relatório sobre os Resultados obtidos através do uso dos algoritmos SIFT e RANSAC para Reconstrução de um Objeto a partir de uma Nuvem de Pontos Gustavo Moreira PUC-Rio, Departamento de Informática Rua
Descritores de Imagem
 Descritores de Imagem André Tavares da Silva 31 de março de 2014 1 Descritores de imagem (continuação) 1.1 Frameworks de detecção de objetos SIFT (scale-invariant features transform) (Lowe, 1999) SIFT
Descritores de Imagem André Tavares da Silva 31 de março de 2014 1 Descritores de imagem (continuação) 1.1 Frameworks de detecção de objetos SIFT (scale-invariant features transform) (Lowe, 1999) SIFT
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Respostas dos Exercícios de Fixação
 Respostas dos Eercícios de Fiação Capítulo 1 1.1) ac + ab + bc = 1.) p = 14 64 9 87 1.7) P =,,Q =, 49 49 49 49 1.8) u+ v = 6 ma 1.10) ( 4b, b ) 1.17) Área =.( AB + BC ).( BC + CD) 1 Última Atualização:
Respostas dos Eercícios de Fiação Capítulo 1 1.1) ac + ab + bc = 1.) p = 14 64 9 87 1.7) P =,,Q =, 49 49 49 49 1.8) u+ v = 6 ma 1.10) ( 4b, b ) 1.17) Área =.( AB + BC ).( BC + CD) 1 Última Atualização:
Scale-Invariant Feature Transform
 Scale-Invariant Feature Transform Renato Madureira de Farias renatomdf@gmail.com Prof. Ricardo Marroquim Relatório para Introdução ao Processamento de Imagens (COS756) Universidade Federal do Rio de Janeiro,
Scale-Invariant Feature Transform Renato Madureira de Farias renatomdf@gmail.com Prof. Ricardo Marroquim Relatório para Introdução ao Processamento de Imagens (COS756) Universidade Federal do Rio de Janeiro,
Visão Computacional CPS754
 Visão Computacional CPS754 aula 11 - reconstrução 3D de câmeras Antonio Oliveira Ricardo Marroquim 1 / 1 visão computacional tópicos conhecido: conjunto de correspondências x i x não conhecido: os respectivos
Visão Computacional CPS754 aula 11 - reconstrução 3D de câmeras Antonio Oliveira Ricardo Marroquim 1 / 1 visão computacional tópicos conhecido: conjunto de correspondências x i x não conhecido: os respectivos
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 16 - Fluxo Ótico - parte II Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje fluxo ótico relembrar Lucas-Kanade Horn-Schunk suavização global alguns métodos
Processamento de Imagens COS756 / COC603 aula 16 - Fluxo Ótico - parte II Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje fluxo ótico relembrar Lucas-Kanade Horn-Schunk suavização global alguns métodos
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Geometria Analítica II - Aula 5 108
 Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Proposta de Resolução. Grupo I. θ = 1. x. Daqui resulta que ( ) ( )< π π π 4 2. π 5π. 1. Se. (x pertence ao 1.º Q e 2x pertence ao 2.º Q).
 ( )< π π π 4 2. π 5π. 1. Se. (x pertence ao 1.º Q e 2x pertence ao 2.º Q).") Grupo I 1. Se π π π π π x, 4, então < x < < x < π. 4 (x pertence ao 1.º Q e x pertence ao.º Q. Assim, tan( x < 0 e cos > 0 Opção: (A tan( x cos( x x. Daqui resulta que ( ( < tan x cos x 0.. sinx = 0 sinx
Grupo I 1. Se π π π π π x, 4, então < x < < x < π. 4 (x pertence ao 1.º Q e x pertence ao.º Q. Assim, tan( x < 0 e cos > 0 Opção: (A tan( x cos( x x. Daqui resulta que ( ( < tan x cos x 0.. sinx = 0 sinx
Detecção de Formas. Carlos Alexandre Mello. Pós-Graduação em Ciência da Computação. Carlos Alexandre Mello 1
 Detecção de Formas Carlos Alexandre Mello Pós-Graduação em Ciência da Computação Carlos Alexandre Mello cabm@cin.ufpe.br 1 Nível Intermediário de Visão Baixo Nível Processos de segmentação, detecção de
Detecção de Formas Carlos Alexandre Mello Pós-Graduação em Ciência da Computação Carlos Alexandre Mello cabm@cin.ufpe.br 1 Nível Intermediário de Visão Baixo Nível Processos de segmentação, detecção de
Exemplo de aplicação
 Exemplo de aplicação Paralaxe O conceito de paralaxe está relacionado com o deslocamento relativo ou aparente dos objetos estacionários, quando um observador em movimento os olha de pontos diferentes.
Exemplo de aplicação Paralaxe O conceito de paralaxe está relacionado com o deslocamento relativo ou aparente dos objetos estacionários, quando um observador em movimento os olha de pontos diferentes.
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Mudança de variável na integral dupla(continuação)
") UNIVERSIDADE FEDERAL DO PARÁ CÁLCULO II - PROJETO NEWTON AULA 7 Assunto: Mudança de Variável na Integral Dupla e Coordenadas Polares Palavras-chaves: mudança de variável, integrais duplas, coordenadas
UNIVERSIDADE FEDERAL DO PARÁ CÁLCULO II - PROJETO NEWTON AULA 7 Assunto: Mudança de Variável na Integral Dupla e Coordenadas Polares Palavras-chaves: mudança de variável, integrais duplas, coordenadas
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 06 - sistemas não lineares Antonio Oliveira Ricardo Marroquim 1 / 38 laboratório de processamento de imagens tópicos RANSAC métodos iterativos (não-lineares) gradientes
Processamento de Imagens CPS755 aula 06 - sistemas não lineares Antonio Oliveira Ricardo Marroquim 1 / 38 laboratório de processamento de imagens tópicos RANSAC métodos iterativos (não-lineares) gradientes
Coordenadas e distância na reta e no plano
 Capítulo 1 Coordenadas e distância na reta e no plano 1. Introdução A Geometria Analítica nos permite representar pontos da reta por números reais, pontos do plano por pares ordenados de números reais
Capítulo 1 Coordenadas e distância na reta e no plano 1. Introdução A Geometria Analítica nos permite representar pontos da reta por números reais, pontos do plano por pares ordenados de números reais
Cálculo 2. Guia de Estudos P1
 Cálculo 2 Guia de Estudos P1 Resuminho Teórico e Fórmulas Parte 1 Cônicas Conceito: Cônicas são formas desenhadas em duas dimensões, considerando apenas os eixos x (horizontal) e y (vertical). Tipos de
Cálculo 2 Guia de Estudos P1 Resuminho Teórico e Fórmulas Parte 1 Cônicas Conceito: Cônicas são formas desenhadas em duas dimensões, considerando apenas os eixos x (horizontal) e y (vertical). Tipos de
A integral definida Problema:
 A integral definida Seja y = f(x) uma função definida e limitada no intervalo [a, b], e tal que f(x) 0 p/ todo x [a, b]. Problema: Calcular (definir) a área, A,da região do plano limitada pela curva y
A integral definida Seja y = f(x) uma função definida e limitada no intervalo [a, b], e tal que f(x) 0 p/ todo x [a, b]. Problema: Calcular (definir) a área, A,da região do plano limitada pela curva y
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais. Prof. Adilson Gonzaga
 Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Reconstrução Geométrica a Partir de Imagens TIC /TCC
 Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Sumário. VII Geometria Analítica Jorge Delgado Katia Frensel Lhaylla Crissaff
 1 Coordenadas no plano 1 1.1 Introdução........................................ 2 1.2 Coordenada e distância na reta............................ 3 1.3 Coordenadas no plano.................................
1 Coordenadas no plano 1 1.1 Introdução........................................ 2 1.2 Coordenada e distância na reta............................ 3 1.3 Coordenadas no plano.................................
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
 04 CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA CAPÍTULO 0 TRANSLAÇÃO E ROTAÇÃO DE EIXOS TRANSLAÇÃO DE EIXOS NO R Sejam e O os eixos primitivos, do Sistema Cartesiano de Eixos Coordenados com origem O(0,0).
04 CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA CAPÍTULO 0 TRANSLAÇÃO E ROTAÇÃO DE EIXOS TRANSLAÇÃO DE EIXOS NO R Sejam e O os eixos primitivos, do Sistema Cartesiano de Eixos Coordenados com origem O(0,0).
Lista 5: Superfícies Engenharia Mecânica - Professora Elisandra Bär de Figueiredo
 Lista 5: Superfícies Engenharia Mecânica - Professora Elisandra Bär de Figueiredo Nos eercícios 1 ao 18 identique e represente geometricamente as superfícies dadas pelas equações: 1. + 9 = 6. = 16. = 9.
Lista 5: Superfícies Engenharia Mecânica - Professora Elisandra Bär de Figueiredo Nos eercícios 1 ao 18 identique e represente geometricamente as superfícies dadas pelas equações: 1. + 9 = 6. = 16. = 9.
Obter as equações paramétricas das cônicas.
 MÓDULO 1 - AULA 1 Aula 1 Equações paramétricas das cônicas Objetivo Obter as equações paramétricas das cônicas. Estudando as retas no plano, você viu que a reta s, determinada pelos pontos P = (x 1, y
MÓDULO 1 - AULA 1 Aula 1 Equações paramétricas das cônicas Objetivo Obter as equações paramétricas das cônicas. Estudando as retas no plano, você viu que a reta s, determinada pelos pontos P = (x 1, y
Modelos Geométricos Transformações
 Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
Modelos Geométricos Transformações Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Aulas teóricas 11/03 Quinta-feira, dia 11 de Março Não vão ser leccionadas aula teóricas.
Cálculo II. Resumo Teórico Completo
 Cálculo II Resumo Teórico Completo Cálculo 2 A disciplina visa estudar funções e gráficos, de forma semelhante a Cálculo 1, mas expande o estudo para funções de mais de uma variável, bem como gráficos
Cálculo II Resumo Teórico Completo Cálculo 2 A disciplina visa estudar funções e gráficos, de forma semelhante a Cálculo 1, mas expande o estudo para funções de mais de uma variável, bem como gráficos
Reconstrução Geométrica a Partir de Imagens TIC
 Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
GEOMETRIA Exercícios
 GEOMETRIA Exercícios Mestrado em Educação - DMFCUL 00/003 1. Determine a equação da circunferência com centro (, 1 e raio 3.. Determine os pontos de intersecção da recta y = com a circunferência do exercício
GEOMETRIA Exercícios Mestrado em Educação - DMFCUL 00/003 1. Determine a equação da circunferência com centro (, 1 e raio 3.. Determine os pontos de intersecção da recta y = com a circunferência do exercício
Universidade Federal do Rio de Janeiro - IM/DCC & NCE
 Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
Aula 4. Coordenadas polares. Definição 1. Observação 1
 Aula Coordenadas polares Nesta aula veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana Embora os sistemas cartesianos sejam muito utilizados, há curvas
Aula Coordenadas polares Nesta aula veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana Embora os sistemas cartesianos sejam muito utilizados, há curvas
Anotador automático de placas de publicidade em vídeos esportivos
 MAC0499 - Trabalho de Formatura Supervisionado Professor: Carlos Eduardo Ferreira Universidade de São Paulo Instituto de Matemática e Estatística Aluno: Ricardo Augusto Fernandes Orientador: Prof. Dr.
MAC0499 - Trabalho de Formatura Supervisionado Professor: Carlos Eduardo Ferreira Universidade de São Paulo Instituto de Matemática e Estatística Aluno: Ricardo Augusto Fernandes Orientador: Prof. Dr.
Reconstrução Geométrica a Partir de Imagens TIC /TCC
 Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aula 5 Conteúdo Geometria Projetiva 3D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aula 5 Conteúdo Geometria Projetiva 3D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC222 Visão Computacional Clustering Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC ramal 5981 Tópicos da aula Transformada de Hough Clustering de formas Hashing geométrico
CC222 Visão Computacional Clustering Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC ramal 5981 Tópicos da aula Transformada de Hough Clustering de formas Hashing geométrico
Geometria Analítica. Cônicas. Prof Marcelo Maraschin de Souza
 Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Aprendizagem de Máquinas. Extração de Características
 Universidade Federal do Paraná (UFPR) Departamento de Informática (DInf) Aprendizagem de Máquinas Extração de Características David Menotti, Ph.D. http://web.inf.ufpr.br/menotti 1 Objetivos Entender os
Universidade Federal do Paraná (UFPR) Departamento de Informática (DInf) Aprendizagem de Máquinas Extração de Características David Menotti, Ph.D. http://web.inf.ufpr.br/menotti 1 Objetivos Entender os
Equação Geral do Segundo Grau em R 2
 8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
Transformações Geométricas Grafos de Cena
 Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Geometria Analítica Exercícios Cônicas em posição geral
 Geometria Analítica Exercícios Cônicas em posição geral Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Soluções Turmas E1 e E3 1 / 16 Resolução dos exercícios da aula 15 Classique
Geometria Analítica Exercícios Cônicas em posição geral Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Soluções Turmas E1 e E3 1 / 16 Resolução dos exercícios da aula 15 Classique
Feature Detector. Prof. Dr. Geraldo Braz Junior
 Feature Detector Prof. Dr. Geraldo Braz Junior Problema: Matching 2 Matching 3 Matching Processo de encontrar uma imagem em outra Normalmente usado para encontrar um objeto numa imagem, mas também: Reconhecimento
Feature Detector Prof. Dr. Geraldo Braz Junior Problema: Matching 2 Matching 3 Matching Processo de encontrar uma imagem em outra Normalmente usado para encontrar um objeto numa imagem, mas também: Reconhecimento
Detecção de falsas correspondências em pares de imagens estereoscópicas utilizando a transformação projetiva no plano e o algoritmo RANSAC
 Detecção de falsas correspondências em pares de imagens estereoscópicas utilizando a transformação projetiva no plano e o algoritmo RANSAC André Caceres Carrilho Mauricio Galo Renato César dos Santos Curitiba,
Detecção de falsas correspondências em pares de imagens estereoscópicas utilizando a transformação projetiva no plano e o algoritmo RANSAC André Caceres Carrilho Mauricio Galo Renato César dos Santos Curitiba,
Extração dos Pontos Característicos de uma Imagem através do método SIFT. Helder C. R. de Oliveira Orientador: Prof. Marco A.
 Extração dos Pontos Característicos de uma Imagem através do método SIFT Helder C. R. de Oliveira Orientador: Prof. Marco A. Piteri Presidente Prudente 2013 Sumário 1 Introdução 1 2 Processamento de Imagens
Extração dos Pontos Característicos de uma Imagem através do método SIFT Helder C. R. de Oliveira Orientador: Prof. Marco A. Piteri Presidente Prudente 2013 Sumário 1 Introdução 1 2 Processamento de Imagens
Implementação do algoritmo SIFT para detecção de objetos em imagens.
 Universidade Federal do Rio de Janeiro Instituto Alberto Luiz Coimbra de Pós-Graduação e Pesquisa de Engenharia Programa de Engenharia de Sistemas e Computação Rio de Janeiro, RJ - Brasil Implementação
Universidade Federal do Rio de Janeiro Instituto Alberto Luiz Coimbra de Pós-Graduação e Pesquisa de Engenharia Programa de Engenharia de Sistemas e Computação Rio de Janeiro, RJ - Brasil Implementação
Exercícios de Geometria Analítica - Prof. Ademir
 Exercícios de Geometria nalítica - Prof. demir Vetores 1. onsidere o triângulo, onde = (1, 1, 1), = (2, 1, 0) e = (3, 2, 3). Verifique que este triângulo é retângulo, diga qual vértice contém o ângulo
Exercícios de Geometria nalítica - Prof. demir Vetores 1. onsidere o triângulo, onde = (1, 1, 1), = (2, 1, 0) e = (3, 2, 3). Verifique que este triângulo é retângulo, diga qual vértice contém o ângulo
CONHECIMENTOS ESPECÍFICOS
 IFPB» Concurso Público Professor Efetivo de Ensino Básico, Técnico e Tecnológico» Edital Nº 16/011 CONHECIMENTOS ESPECÍFICOS» MATEMÁTICA (Perfil 1) «1. Classifique os itens a seguir em V (verdadeiro) ou
IFPB» Concurso Público Professor Efetivo de Ensino Básico, Técnico e Tecnológico» Edital Nº 16/011 CONHECIMENTOS ESPECÍFICOS» MATEMÁTICA (Perfil 1) «1. Classifique os itens a seguir em V (verdadeiro) ou
INSTITUTO DE MATEMÁTICA - UFRJ DEPARTAMENTO DE MATEMÁTICA APLICADA CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA Professor Felipe Acker parte 1 - o plano
 1 INSTITUTO DE MATEMÁTICA - UFRJ DEPARTAMENTO DE MATEMÁTICA APLICADA CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA Professor Felipe Acker parte 1 - o plano Exercícios - números complexos e o Teorema Fundamental
1 INSTITUTO DE MATEMÁTICA - UFRJ DEPARTAMENTO DE MATEMÁTICA APLICADA CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA Professor Felipe Acker parte 1 - o plano Exercícios - números complexos e o Teorema Fundamental
2 Integrais Duplas em Coordenadas Polares
 Lista 3: CDCI2 Turmas: 2AEMN e 2BEMN Prof. Alexandre Alves Universidade São Judas Tadeu 1 Mudança de Variáveis em Integrais Duplas Exercício 1: Calcule a integral dupla transformando a região de integração
Lista 3: CDCI2 Turmas: 2AEMN e 2BEMN Prof. Alexandre Alves Universidade São Judas Tadeu 1 Mudança de Variáveis em Integrais Duplas Exercício 1: Calcule a integral dupla transformando a região de integração
Álgebra Linear I - Aula 5. Roteiro
 Álgebra Linear I - Aula 5 1. Produto misto. 2. Equação paramétrica da reta. 3. Retas paralelas e reversas. 4. Equação paramétrica do plano. 5. Ortogonalizade. Roteiro 1 Produto Misto Dados três vetores
Álgebra Linear I - Aula 5 1. Produto misto. 2. Equação paramétrica da reta. 3. Retas paralelas e reversas. 4. Equação paramétrica do plano. 5. Ortogonalizade. Roteiro 1 Produto Misto Dados três vetores
0 < c < a ; d(f 1, F 2 ) = 2c
 = 2c") Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 09 - single-view final Antonio Oliveira Ricardo Marroquim 1 / 25 laboratório de processamento de imagens tópicos pontos e retas de fuga métricas afim em uma foto calibrando
Processamento de Imagens CPS755 aula 09 - single-view final Antonio Oliveira Ricardo Marroquim 1 / 25 laboratório de processamento de imagens tópicos pontos e retas de fuga métricas afim em uma foto calibrando
Aula 15. Derivadas Direcionais e Vetor Gradiente. Quando u = (1, 0) ou u = (0, 1), obtemos as derivadas parciais em relação a x ou y, respectivamente.
 ou u = (0, 1), obtemos as derivadas parciais em relação a x ou y, respectivamente.") Aula 15 Derivadas Direcionais e Vetor Gradiente Seja f(x, y) uma função de variáveis. Iremos usar a notação D u f(x 0, y 0 ) para: Derivada direcional de f no ponto (x 0, y 0 ), na direção do vetor unitário
Aula 15 Derivadas Direcionais e Vetor Gradiente Seja f(x, y) uma função de variáveis. Iremos usar a notação D u f(x 0, y 0 ) para: Derivada direcional de f no ponto (x 0, y 0 ), na direção do vetor unitário
Álgebra Linear e Geometria Anaĺıtica. Vetores, Retas e Planos
 universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 3 Vetores, Retas e lanos roduto interno em R n [3 01] Dados os vetores X =
universidade de aveiro departamento de matemática Álgebra Linear e Geometria Anaĺıtica Agrupamento IV (ECT, EET, EI) Capítulo 3 Vetores, Retas e lanos roduto interno em R n [3 01] Dados os vetores X =
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 04 - reconstrução de sinais digitais Antonio Oliveira Ricardo Marroquim 1 / 42 aula de hoje e reconstrução overview amostrando um sinal reconstruindo um sinal
Processamento de Imagens COS756 / COC603 aula 04 - reconstrução de sinais digitais Antonio Oliveira Ricardo Marroquim 1 / 42 aula de hoje e reconstrução overview amostrando um sinal reconstruindo um sinal
Superfícies e Curvas no Espaço
 Superfícies e Curvas no Espaço Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de deembro de 2001 1 Quádricas Nesta
Superfícies e Curvas no Espaço Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de deembro de 2001 1 Quádricas Nesta
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
Cálculo a Várias Variáveis I - MAT Cronograma para P2: aulas teóricas (segundas e quartas)
") Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Capítulo 2. Retas no plano. 1. Retas verticais e não-verticais. Definição 1
 Capítulo 2 Retas no plano O objetivo desta aula é determinar a equação algébrica que representa uma reta no plano. Para isso, vamos analisar separadamente dois tipos de reta: reta vertical e reta não-vertical.
Capítulo 2 Retas no plano O objetivo desta aula é determinar a equação algébrica que representa uma reta no plano. Para isso, vamos analisar separadamente dois tipos de reta: reta vertical e reta não-vertical.
MAT 112 Turma Vetores e Geometria. Prova 2 29 de junho de 2017
 MAT 112 Turma 2017146 Vetores e Geometria Prof. Paolo Piccione Prova 2 29 de junho de 2017 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale as alternativas
MAT 112 Turma 2017146 Vetores e Geometria Prof. Paolo Piccione Prova 2 29 de junho de 2017 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale as alternativas
MAT 112 Turma Vetores e Geometria. Prova 2 29 de junho de 2017
 MAT 112 Turma 2017146 Vetores e Geometria Prof. Paolo Piccione Prova 2 29 de junho de 2017 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale as alternativas
MAT 112 Turma 2017146 Vetores e Geometria Prof. Paolo Piccione Prova 2 29 de junho de 2017 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale as alternativas
Equação da reta. No R 2 UNIVERSIDADE FEDERAL DO PARÁ CÁLCULO II - PROJETO NEWTON AULA 05
 UNIVERSIDADE FEDERAL DO PARÁ CÁLCULO II - PROJETO NEWTON AULA 05 Assunto:Equações da reta no R 2 e no R 3, equações do plano, funções de uma variável real a valores em R n Palavras-chaves: Equação da reta,
UNIVERSIDADE FEDERAL DO PARÁ CÁLCULO II - PROJETO NEWTON AULA 05 Assunto:Equações da reta no R 2 e no R 3, equações do plano, funções de uma variável real a valores em R n Palavras-chaves: Equação da reta,
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
MAT 112 Turma Vetores e Geometria. Prova 2 28 de junho de 2018
 MAT 112 Turma 2018134 Vetores e Geometria Prof. Paolo Piccione Prova 2 28 de junho de 2018 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale as alternativas
MAT 112 Turma 2018134 Vetores e Geometria Prof. Paolo Piccione Prova 2 28 de junho de 2018 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos. Assinale as alternativas
Método dos Mínimos Quadrados
 Método dos Mínimos Quadrados Laura Goulart UESB 4 de Abril de 2019 Laura Goulart (UESB) Método dos Mínimos Quadrados 4 de Abril de 2019 1 / 22 Objetivos O Método dos Mínimos Quadrados (MMQ) é uma técnica
Método dos Mínimos Quadrados Laura Goulart UESB 4 de Abril de 2019 Laura Goulart (UESB) Método dos Mínimos Quadrados 4 de Abril de 2019 1 / 22 Objetivos O Método dos Mínimos Quadrados (MMQ) é uma técnica
Jorge M. V. Capela, Marisa V. Capela. Araraquara, SP
 Cônicas e Equações Quadráticas Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Parábolas 2 3 4 5 Introdução Parábolas Parábolas
Cônicas e Equações Quadráticas Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Parábolas 2 3 4 5 Introdução Parábolas Parábolas
Reconstrução Geométrica a Partir de Imagens TIC
 29/3/26 Reconstrução Geométrica a Partir de Imagens TIC-.73 Aula 4 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/26./tic-.73
29/3/26 Reconstrução Geométrica a Partir de Imagens TIC-.73 Aula 4 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/26./tic-.73
Aula 9 Cônicas - Rotação de sistemas de coordenadas
 MÓDULO 1 - AULA 9 Aula 9 Cônicas - Rotação de sistemas de coordenadas Objetivos Entender mudanças de coordenadas por rotações. Identificar uma cônica rotacionada a partir da sua equação geral. Identificar
MÓDULO 1 - AULA 9 Aula 9 Cônicas - Rotação de sistemas de coordenadas Objetivos Entender mudanças de coordenadas por rotações. Identificar uma cônica rotacionada a partir da sua equação geral. Identificar
21 e 22. Superfícies Quádricas. Sumário
 21 e 22 Superfícies uádricas Sumário 21.1 Introdução....................... 2 21.2 Elipsoide........................ 3 21.3 Hiperboloide de uma Folha.............. 4 21.4 Hiperboloide de duas folhas..............
21 e 22 Superfícies uádricas Sumário 21.1 Introdução....................... 2 21.2 Elipsoide........................ 3 21.3 Hiperboloide de uma Folha.............. 4 21.4 Hiperboloide de duas folhas..............
(b) a quantidade de cloro no tanque no instante t;
 a quantidade de cloro no tanque no instante t;") NOME: Universidade Federal do Rio de Janeiro Instituto de Matemtica Departamento de Mtodos Matemticos Gabarito da a Prova de Cálculo II - 06//0 a QUESTÃO : Um tanque possui 0 litros de solução com cloro
NOME: Universidade Federal do Rio de Janeiro Instituto de Matemtica Departamento de Mtodos Matemticos Gabarito da a Prova de Cálculo II - 06//0 a QUESTÃO : Um tanque possui 0 litros de solução com cloro
Capítulo 6 Extração de Características e Reconhecimento de Padrões e Objetos. Computação Gráfica - Vol. 2 - Cap. 6
 Capítulo 6 Extração de Características e Reconhecimento de Padrões e Objetos 1 Capítulo 6 6.1. Segmentação 6.2. Tipos de características 6.3. Descritores de forma 6.4. Reconhecimento de Padrões em Imagens
Capítulo 6 Extração de Características e Reconhecimento de Padrões e Objetos 1 Capítulo 6 6.1. Segmentação 6.2. Tipos de características 6.3. Descritores de forma 6.4. Reconhecimento de Padrões em Imagens
1 R n, propriedades, topologia
 1 R n, propriedades, topologia Lembrete: Dados dois conjuntos A, B é dito produto cartesiano de A com B o conjunto A B = {(a, b) : a A, b B}. Em particular, R R = R 2 = {(x, y) : x, y R}: podemos representar
1 R n, propriedades, topologia Lembrete: Dados dois conjuntos A, B é dito produto cartesiano de A com B o conjunto A B = {(a, b) : a A, b B}. Em particular, R R = R 2 = {(x, y) : x, y R}: podemos representar
Geometria Analítica II - Aula 4 82
 Geometria Analítica II - Aula 4 8 IM-UFF K. Frensel - J. Delgado Aula 5 Esferas Iniciaremos o nosso estudo sobre superfícies com a esfera, que já nos é familiar. A esfera S de centro no ponto A e raio
Geometria Analítica II - Aula 4 8 IM-UFF K. Frensel - J. Delgado Aula 5 Esferas Iniciaremos o nosso estudo sobre superfícies com a esfera, que já nos é familiar. A esfera S de centro no ponto A e raio
Aula 6. Doravante iremos dizer que r(t) é uma parametrização da curva, e t é o parâmetro usado para descrever a curva.
 é uma parametrização da curva, e t é o parâmetro usado para descrever a curva.") Curvas ou Funções Vetoriais: Aula 6 Exemplo 1. Círculo como coleção de vetores. Vetor posição de curva: r(t) = (cos t, sen t), t 2π r(t) pode ser vista como uma função vetorial: r : [, 2π] R R 2 Doravante
Curvas ou Funções Vetoriais: Aula 6 Exemplo 1. Círculo como coleção de vetores. Vetor posição de curva: r(t) = (cos t, sen t), t 2π r(t) pode ser vista como uma função vetorial: r : [, 2π] R R 2 Doravante