Aula 5 - Segmentação de Imagens
|
|
|
- João Vítor Henriques Garrau
- 7 Há anos
- Visualizações:
Transcrição
1 Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1
2 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo que subdivide uma Imagem em suas partes constituintes. Baseado em duas propriedades dos níveis de cinza: 1 Descontinuidade 2 Similaridade Dois tipos básicos de Segmentos: 1 Fronteiras 2 Regiões 2
3 Detecção de Descontinuidades: a) Detecção de Pontos Isolados: Operação com Templates R = 9 i= 1 w i. z i Dizemos que um ponto foi detectado na posição da máscara se: R > T onde T é um Limiar não-negativo. Se um nível de cinza de alto valor está isolado em uma região, o filtro passa-alta é usado para detectar esse ponto, aumentando sua diferença. 3
4 b) Detecção de linhas: Operação com Templates Linhas Horizontais 45º Linhas - 45º Verticais Algoritmo: Aplica-se cada máscara à Imagem obtendo-se os resultados R 1 = Linhas Horizontais R 2 = 45 o R 3 = Linhas Verticais R 4 = Se em um certo ponto da Imagem R i > R j para todos os j # i, diz-se que esse ponto está mais provavelmente associado com uma linha na direção da máscara i. 4

5 c) Detecção de Bordas: Uma Borda é o limite entre duas regiões com propriedades relativamente distintas de nível de cinza. A magnitude da primeira derivada pode ser usada na detecção da presença de uma borda em uma Imagem. A segunda derivada pode ser usada para determinar se um píxel da borda localiza-se no lado escuro ou claro da Imagem. A segunda derivada possui um cruzamento por zero no ponto intermediário da transição dos níveis de cinza. 5




6 O gradiente de uma imagem: Imagem Gradiente O gradiente aponta na direção da mudança de intensidade mais rápida. A direção do gradiente é dada por: Ou seja, a direção é perpendicular à borda no ponto. A Força da Borda ( edge strength ) é dada pela Magnitude do gradiente.
7 (Robert, Sobel, Prewitt, etc...) - Magnitude do Gradiente: (Primeira Derivada) = = y x G G y y x f x y x f y x f ), ( ), ( ), ( Operadores Gradiente 7 (Primeira Derivada) - Direção do Gradiente: (relativamente a x) y y x f x y x f y x f + ), ( ), ( ), ( ) ( tan ), ( 1 x y G G y x = θ



8 Efeitos do ruído Considere uma única linha ou coluna de uma imagem Plotando a intensidade como função da posição: Onde está a Borda?
9 Solução: suavizar primeiro Gaussiana Onde está a Borda? Procurar por picos em:



10 Teorema da Derivada da convolução Isso reduz uma operação: Derivada da Gaussiana
 Derivada segunda")

")
11 Laplaciano da Gaussiana (LoG) Derivada segunda da Gaussiana Operador Laplaciano da Gaussiana Onde está a borda? Passagem por zero (Zero-crossings)








12 Filtros de detecção de bordas 2D Laplaciano da Gaussiana Gaussiana Derivada da Gaussiana é o operador Laplaciano:
13 Detector de Bordas de Canny Algoritmo: 1. Suavizar a imagem usando um filtro Gaussiano para reduzir ruídos. 2. Computar o gradiente g(x,y) e a direção do gradiente em cada ponto. Os pontos de bordas calculados originam cristas na imagem de magnitudes do gradiente. 3. Supressão de Não-Máximos: Buscar os pontos de maior valor das cristas e fazer igual a zero os outros pontos. 4. Estabelecer 2 Thresholds T1<T2. Valores da crista maiores que T2 são considerados Bordas Fortes e valores entre T1 e T2 são Bordas Fracas. 5. Incorporar às Bordas Fortes as Bordas Fracas que sejam 8-conectadas a elas. 13


14 Detector de Bordas de Canny Imagem original (Lena)


15 Detector de Bordas de Canny Norma do gradiente


16 Detector de Bordas de Canny thresholding
17 Detector de Bordas de Canny Afinamento das bordas thinning ( supressão de não-máximos)
18 Supressão de Não-máximos Verificar se o pixel é um máximo local ao longo da direção do gradiente Verificar os pixels p e r
 e usar isto para prever os próximos pontos (aquí tanto r ou")
19 Prever o próximo Ponto de borda Tangente à curva de borda Assumir que o ponto marcado é um ponto de borda. Contruir a tangente à curva de borda (normal ao gradiente no ponto) e usar isto para prever os próximos pontos (aquí tanto r ou s). (Forsyth & Ponce)
20 d) Deteção de Cantos ( Corner detection) Corners contêm mais bordas do que as linhas. Um ponto em uma linha é difícil corresponder em outra.
21 Corners contêm mais bordas do que as linhas. Um corner é mais fácil
22 Os Detectores de Borda normalmente falham nos Corners
23 Corners Um canto ( corner ) pode ser definido como a intersecção de duas bordas ( edges ). Um corner também pode ser definido como um ponto para o qual existem duas direções dominantes diferentes em uma vizinhança local do ponto. Ou seja: Sobre o ponto de corner, o gradiente é mal definido. Próximo ao ponto de corner, o gradiente tem dois valores diferentes.
24 Alguns Detectores de Cantos (Corner Detector) Detector de corner de Moravec Detector de corner de Harris Detector de corner Shi-Tomasi ou Kanade-Tomasi corner detector. Wang and Brady corner detection SUSAN corner detector Trajkovic and Hedley corner detector Haralick Corner Detector 24

25 Corner Detection 25
26 e) Detecção de Fronteira: ( Boundary ) A fronteira dos objetos é, talvez, a parte mais importante da hierarquia das estruturas que une os dados de uma imagem com a sua interpretação. As técnicas de Detecção de Bordas detectam descontinuidades de Intensidade. Na prática, os píxels de borda detectados, raramente caracterizam completamente uma fronteira de um objeto, devido ao ruído, a quebra de fronteiras por motivo de iluminação não uniforme e outros efeitos que causam descontinuidades. A utilização do Conhecimento torna-se um fator relevante na maioria dos casos. 26
27 Análise Local (Similaridade): - Analisar a vizinhança ( 3 x 3 ou 5 x 5 ) de um pixel (x,y) de uma imagem gradiente. - Todos os pontos similares são unidos formando uma fronteira de pixels que possuam propriedades comuns. - As propriedades usadas para a similaridade dos pixel são: A magnitude do gradiente: G [ f x, y) ] G[ f ( x, y )] T ( 1 1 A direção do gradiente: α x, y) α( x, y ) < ( 1 1 A onde T é um valor de limiar. onde A é um ângulo de limiar. - A vizinhança é deslocada sobre toda a imagem. 27
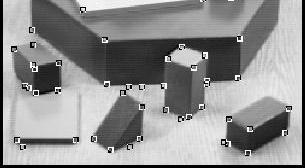
 Detector de Sobel para bordas verticais.")
 Ligação de todos os pontos que possuam a magnitude de gradiente maior que 25 e")
28 Exemplo Localizar retângulos compatíveis com o tamanho de placa de carro. b) Detector de Sobel para bordas verticais. c) Detector de Sobel para bordas horizontais. d) Ligação de todos os pontos que possuam a magnitude de gradiente maior que 25 e cujas direções de gradiente não diferem de 15 o, eliminando-se pequenos segmentos isolados. 28
29 Seguidor de Borda ( Edge Following ): - Sendo (x,y) a posição de um pixel sobre a borda de uma imagem gradiente. - Avaliar os pixels na vizinhança de 8 de (x,y) e escolher o de maior magnitude do gradiente. - Deslocar a vizinhança de 8, centrada neste novo pixel, e reavaliar no sentido do deslocamento, o gradiente de maior valor. - Repetir a operação até que o pixel inicial seja reencontrado. - Interpolar os pontos através de polinômios de baixa ordem. 29
30 Correlação não Linear: A fronteira a ser detectada é tratada como um Template, sobre uma imagem gradiente. Este Template é deslocado sobre a imagem e para cada posição é computado o número de correspondências. Se este número excede um limiar, a posição da fronteira é assumida como a posição do Template. 30
31 Detecção de Fronteira por Divida-e-Conquiste: Útil quando a fronteira tem pouca curvatura e o ruído é baixo. Conhecidos dois pontos da fronteira (1 e 2), pesquisar ao longo da perpendicular da reta que os une, o ponto de mais alta magnitude do gradiente (3). Repetir o processo para cada segmento formado pelos pontos (2 e 3) (1 e 3), determinando os outros elementos pertencentes à fronteira (4, 5,...). 31
32 f) Detecção de curvas. TRANSFORMADA DE HOUGH : (HT) Aplicada sobre uma imagem gradiente. Técnica para a detecção de curvas que possam ser descritas de forma paramétrica (linha reta, círculo, etc...). 32
33 Detecção de Retas: TRANSFORMADA DE HOUGH : (HT) Uma linha reta que conecte uma seqüência de pixels pode ser expressa por: y = mx + c m coeficiente angular slope c intersecção com y intercept A equação da reta acima pode ser reescrita da seguinte forma: c = - mx + y 33
34 TRANSFORMADA DE HOUGH : (HT) c = - mx + y y = m x + c 34
35 Exemplo: Espaço da Imagem Pontos Definem as Retas Transformando y x y = mx + c c = - mx + y = m. 1 + c c = -1 m = m. 2 + c c = -2 m = m. 4 + c c = -4 m = m. 4 + c c = -4 m 35
36 Espaço de Parâmetros 3 pontos de mesmos coeficientes (m,c) = (-1,4) definem 3 pontos colineares no Plano de Imagem. y = mx + c y = -1x + 4 Espaço de Parâmetros Espaço da Imagem 36
37 Principal Problema com a Representação no Espaço de Parâmetros (m,c) Tanto m como c podem variar de ( m, c) complicando a solução computacional. Utilização de Coordenadas Polares. Espaço da Imagem Espaço de Parâmetros ρ = x. cosθ + y. senθ Equação da reta 37
38 Propriedades da HT com coordenadas Polares: Propriedade 1 : Um ponto no espaço da imagem corresponde a uma senóide no espaço de parâmetros. Propriedade 2 : Um ponto no espaço de parâmetros corresponde a uma reta no espaço da imagem. Propriedade 3 : Pontos que caem na mesma reta do espaço da imagem correspondem a curvas com o mesmo ponto em comum no espaço de parâmetros. Propriedade 4 : Pontos que caem na mesma curva no espaço de parâmetros correspondem às retas que passam por um ponto no espaço da imagem. 38


39 HT com coordenadas polares. A = pontos 1,3 e 5 são colineares B = pontos 2,3 e 4 são colineares 39
40 Algoritmo da Transformada de Hough: 1. Quantizar o espaço de parâmetros ( ρ, θ ) apropriadamente, formando um arranjo acumulador A( ρ, θ ) inicialmente zerado. Exemplo: 90 θ 90 θ = 10 2D ρ 2D ρ = 2 Onde D é a resolução linear da Imagem 40
41 2. Para cada ponto (x, y) na imagem gradiente cuja magnitude seja superior a um determinado limiar (pixel de borda), incrementar as células de arranjo acumulador que satisfaçam a equação da reta: θ de θ ρ = x.cosθ + y.sen θ Obs: variar e calcular, aproximando em ρ ρ No Arranjo Acumulador, fazer: A ( ρ, θ ) A ( ρ, θ ) Inspecionar o Arranjo Acumulador As células com os valores mais altos correspondem a pontos colineares na imagem, definindo uma reta por célula, cuja equação é dada por: ρ = x.cosθ + y.sen θ e o valor da célula representa o número de pontos na imagem que pertencem àquela reta. 41


42 Exemplo: Imagem Imagem Gradiente Retas obtidas através da Transformada de Hough. 42
43 Arranjo Acumulador para a Imagem anterior: ρ = x.cosθ + y.sen θ Exemplo: ( 45) = x.cos120 + y sen120 Equação de uma reta. ( 45) = x.( 0,5) + y(0,86) y = 0,58x 52,3 43
44 Detecção de outras curvas através da HT: Qualquer curva que possa ser representada por sua equação parametrizada, pode ser detectada através da transformada de Hough. Circunferência (x a) 2 + (y b) 2 = r 2 arranjo acumulador A ( a, b, r) Elipse 2 ( x x0 ) ( y y a b ) = arranjo acumulador A ( a, b, x 0,y 0 ) Transformada de Hough Generalizada (GHT): Permite a detecção de curvas de qualquer formato através da parametrização do possível centro da curva: A(x c,y c ) 1 44
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
SEL-0339 Introdução à Visão Computacional. Aula 5 Segmentação de Imagens
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 5 Segmentação de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga Segmentação de
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 5 Segmentação de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga Segmentação de
Universidade Federal do Rio de Janeiro - IM/DCC & NCE
 Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 07 - deteção de características de baixo-nível (low-level feature detection) Antonio Oliveira Ricardo Marroquim 1 / 35 aula de hoje feature detection overview
Processamento de Imagens COS756 / COC603 aula 07 - deteção de características de baixo-nível (low-level feature detection) Antonio Oliveira Ricardo Marroquim 1 / 35 aula de hoje feature detection overview
Introdução ao Processamento Digital de Imagem MC920 / MO443
 Introdução ao Processamento Digital de Imagem MC920 / MO443 Prof. Hélio Pedrini Instituto de Computação UNICAMP 1º Semestre de 2017 Roteiro 1 Segmentação Detecção de Descontinuidades Detecção de Pontos,
Introdução ao Processamento Digital de Imagem MC920 / MO443 Prof. Hélio Pedrini Instituto de Computação UNICAMP 1º Semestre de 2017 Roteiro 1 Segmentação Detecção de Descontinuidades Detecção de Pontos,
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Filtros espaciais. Processamento e Recuperação de Imagens Médicas. Prof. Luiz Otavio Murta Jr. Depto. De Computação e Matemática (FFCLRP/USP)
") Processamento e Recuperação de Imagens Médicas Prof. Luiz Otavio Murta Jr. Depto. De Computação e Matemática (FFCLRP/USP) 1 Propriedades Operadores de suavização os elementos da máscara são positivos e
Processamento e Recuperação de Imagens Médicas Prof. Luiz Otavio Murta Jr. Depto. De Computação e Matemática (FFCLRP/USP) 1 Propriedades Operadores de suavização os elementos da máscara são positivos e
PRÁTICA 5 Prof. Dr. Evandro Luis Linhari Rodrigues
 PRÁTICA 5 Prof. Dr. Evandro Luis Linhari Rodrigues Além da solução usando Matlab, todos os exercícios deverão ser implementados também usando Python e OpenCV. Segmentação de Imagens Parte 1. 1) Detecção
PRÁTICA 5 Prof. Dr. Evandro Luis Linhari Rodrigues Além da solução usando Matlab, todos os exercícios deverão ser implementados também usando Python e OpenCV. Segmentação de Imagens Parte 1. 1) Detecção
SEL-0339 Introdução à Visão Computacional. Aula 2 Processamento Espacial (Parte 2)
") Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial (Parte 2) Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial (Parte 2) Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Detecção de Formas. Carlos Alexandre Mello. Pós-Graduação em Ciência da Computação. Carlos Alexandre Mello 1
 Detecção de Formas Carlos Alexandre Mello Pós-Graduação em Ciência da Computação Carlos Alexandre Mello cabm@cin.ufpe.br 1 Nível Intermediário de Visão Baixo Nível Processos de segmentação, detecção de
Detecção de Formas Carlos Alexandre Mello Pós-Graduação em Ciência da Computação Carlos Alexandre Mello cabm@cin.ufpe.br 1 Nível Intermediário de Visão Baixo Nível Processos de segmentação, detecção de
Álgebra Linear em Visão Computacional
 Visão geral Universidade Federal do Rio Grande do Norte Material compilado em 30 de novembro de 2016. Licença desta apresentação: http://creativecommons.org/licenses/ Introdução Conceitos básicos Operadores
Visão geral Universidade Federal do Rio Grande do Norte Material compilado em 30 de novembro de 2016. Licença desta apresentação: http://creativecommons.org/licenses/ Introdução Conceitos básicos Operadores
SEL Visão Computacional. Aula 2 Processamento Espacial
 Departamento de Engenharia Elétrica - EESC-USP SEL-5895 - Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Adilson Gonzaga Prof. Dr. Evandro Linhari Rodrigues Prof. Dr. Marcelo Andrade da Costa
Departamento de Engenharia Elétrica - EESC-USP SEL-5895 - Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Adilson Gonzaga Prof. Dr. Evandro Linhari Rodrigues Prof. Dr. Marcelo Andrade da Costa
PMR2560 Visão Computacional Detecção de bordas. Prof. Eduardo L. L. Cabral
 PMR56 Visão Computacional Detecção de bordas Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Características; Detecção de bordas. Características Tipos de características: Bordas; Cantos;
PMR56 Visão Computacional Detecção de bordas Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Características; Detecção de bordas. Características Tipos de características: Bordas; Cantos;
TE073 PDS II Programa de Graduação em Engenharia Elétrica
 TE073 PDS II Programa de Graduação em Engenharia Elétrica Prof. Alessandro Zimmer zimmer@eletrica.ufpr.br www.eletrica.ufpr.br/~zimmer/te073 Processamento Digital de Imagens PDI: Segmentação Os algoritmos
TE073 PDS II Programa de Graduação em Engenharia Elétrica Prof. Alessandro Zimmer zimmer@eletrica.ufpr.br www.eletrica.ufpr.br/~zimmer/te073 Processamento Digital de Imagens PDI: Segmentação Os algoritmos
Fundamentos da Computação Gráfica
 Fundamentos da Computação Gráfica Trabalho 2 Visão. Detecção de cantos. Manuel Alejandro Nodarse Moreno (1322198) Introdução. Detecção de cantos é uma abordagem utilizada em sistemas de visão computacional
Fundamentos da Computação Gráfica Trabalho 2 Visão. Detecção de cantos. Manuel Alejandro Nodarse Moreno (1322198) Introdução. Detecção de cantos é uma abordagem utilizada em sistemas de visão computacional
T4.1 Processamento de Imagem
 T4.1 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas 4.
T4.1 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas 4.
Quadro Segmentação de Imagens
 UNIVERSIDADE DE SÃO PAULO - SÃO CARLOS INSTITUTO DE CIÊNCIAS Processamento de Imagens - SCC0251 2013/1 Prof. Dr. Mario Gazziro Monitor PAE: Vinicius Ruela Pereira Borges - viniciusrpb@icmc.usp.br 1 Método
UNIVERSIDADE DE SÃO PAULO - SÃO CARLOS INSTITUTO DE CIÊNCIAS Processamento de Imagens - SCC0251 2013/1 Prof. Dr. Mario Gazziro Monitor PAE: Vinicius Ruela Pereira Borges - viniciusrpb@icmc.usp.br 1 Método
Capítulo III Processamento de Imagem
 Capítulo III Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas
Capítulo III Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas
Simulação Gráfica. Segmentação de Imagens Digitais. Julio C. S. Jacques Junior
 Simulação Gráfica Segmentação de Imagens Digitais Julio C. S. Jacques Junior Segmentação Subdivide uma imagem em suas partes ou objetos constituintes. O nível até o qual essa subdivisão deve ser realizada
Simulação Gráfica Segmentação de Imagens Digitais Julio C. S. Jacques Junior Segmentação Subdivide uma imagem em suas partes ou objetos constituintes. O nível até o qual essa subdivisão deve ser realizada
SEGMENTAÇÃO DE IMAGENS
 SEGMENTAÇÃO DE IMAGENS Definição Segmentação é o processo que divide uma imagem em regiões distintas, cada uma com pixels com atributos similares Particiona os pixels de uma imagem em grupos, geralmente
SEGMENTAÇÃO DE IMAGENS Definição Segmentação é o processo que divide uma imagem em regiões distintas, cada uma com pixels com atributos similares Particiona os pixels de uma imagem em grupos, geralmente
T4 Processamento de Imagem
 T4 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Hélder Filipe Pinto de Oliveira Resumo 1. Manipulação ponto a ponto 2. Conetividade 3. Filtros espaciais 4. Extração de estruturas
T4 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Hélder Filipe Pinto de Oliveira Resumo 1. Manipulação ponto a ponto 2. Conetividade 3. Filtros espaciais 4. Extração de estruturas
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 09 - curvatura Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection overview curvatura espaço de escala block matching 2 / 1 curvatura o
Processamento de Imagens COS756 / COC603 aula 09 - curvatura Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection overview curvatura espaço de escala block matching 2 / 1 curvatura o
Filtragem linear. jorge s. marques, questão: como remover artefactos?
 Filtragem linear questão: como remover artefactos? redução de ruído como reduzir o ruído de uma imagem? ideia: substituir cada piel por uma média Jm,n = m+ k n+ k k + p= m kq= n k Ip,q k= k+ k+ k= filtro
Filtragem linear questão: como remover artefactos? redução de ruído como reduzir o ruído de uma imagem? ideia: substituir cada piel por uma média Jm,n = m+ k n+ k k + p= m kq= n k Ip,q k= k+ k+ k= filtro
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 13 - Transformada de Hough e SIFT Antonio Oliveira Ricardo Marroquim 1 / 41 aula de hoje descritores Transformada de Hough SIFT 2 / 41 transformada de Hough
Processamento de Imagens COS756 / COC603 aula 13 - Transformada de Hough e SIFT Antonio Oliveira Ricardo Marroquim 1 / 41 aula de hoje descritores Transformada de Hough SIFT 2 / 41 transformada de Hough
Obtendo Contornos. Prof. Dr. Geraldo Braz Junior
 Obtendo Contornos Prof. Dr. Geraldo Braz Junior Até então Como achar as linhas (contorno) da rodovia? Ou pelo menos, diminuir a quanbdade de bordas? 2 Contorno? Borda não é contorno As Bordas de uma imagem
Obtendo Contornos Prof. Dr. Geraldo Braz Junior Até então Como achar as linhas (contorno) da rodovia? Ou pelo menos, diminuir a quanbdade de bordas? 2 Contorno? Borda não é contorno As Bordas de uma imagem
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 08 - deteção de características de baixo-nível (low-level feature detection) parte II Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection
Processamento de Imagens COS756 / COC603 aula 08 - deteção de características de baixo-nível (low-level feature detection) parte II Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje feature detection
UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba. Segmentação
 UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba Segmentação A separação dos pixeis relativos a cada objeto, ou região, é uma etapa fundamental para o sucesso do processo de análise da imagem. Embora
UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba Segmentação A separação dos pixeis relativos a cada objeto, ou região, é uma etapa fundamental para o sucesso do processo de análise da imagem. Embora
TELEVISÃO DIGITAL LEEC 2006/2007
 TELEVISÃO DIGITAL LEEC 2006/2007 DETECÇÃO DE CONTORNOS GRUPO 6: Hugo Miguel Rodrigues Gonçalves Dinis Guedes Afonso ee01171 ee01148 Introdução Este trabalho tem como objectivo a implementação de métodos
TELEVISÃO DIGITAL LEEC 2006/2007 DETECÇÃO DE CONTORNOS GRUPO 6: Hugo Miguel Rodrigues Gonçalves Dinis Guedes Afonso ee01171 ee01148 Introdução Este trabalho tem como objectivo a implementação de métodos
Detectando Bordas: Filtros Passa Alta
 Detectando Bordas: Filtros Passa Alta Prof. Dr. Geraldo Braz Junior Baseado nas notas de aula de Fei- Fei Li e A Prac'cal Introduc'on to Computer Vision with OpenCV by Kenneth Dawson- Howe Porque contornos
Detectando Bordas: Filtros Passa Alta Prof. Dr. Geraldo Braz Junior Baseado nas notas de aula de Fei- Fei Li e A Prac'cal Introduc'on to Computer Vision with OpenCV by Kenneth Dawson- Howe Porque contornos
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais. Prof. Adilson Gonzaga
 Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Orientação de Bordas em Imagens Digitais: Abordagem por Análise de Vizinhança Local
 Orientação de Bordas em Imagens Digitais: Abordagem por Análise de Vizinhança Local Inês Aparecida Gasparotto Boaventura DCCE-IBILCE-UNESP Rua Cristovão Colombo, 2265 15054-000, São José do Rio Preto,
Orientação de Bordas em Imagens Digitais: Abordagem por Análise de Vizinhança Local Inês Aparecida Gasparotto Boaventura DCCE-IBILCE-UNESP Rua Cristovão Colombo, 2265 15054-000, São José do Rio Preto,
SEL-0339 Introdução à Visão Computacional. Aula 2 Processamento Espacial
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 3 de março de 2016 Transformação e filtragem de imagens
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 3 de março de 2016 Transformação e filtragem de imagens
CARACTERÍSTICAS DE IMAGENS: PONTOS E SUPERFÍCIES
 CARACTERÍSTICAS DE IMAGENS: PONTOS E SUPERFÍCIES O que são? CARACTERÍSTICAS DE IMAGENS (Image Features) o Propriedades Globais de uma imagem, ou de parte dela (característica global). Por exemplo: Médias
CARACTERÍSTICAS DE IMAGENS: PONTOS E SUPERFÍCIES O que são? CARACTERÍSTICAS DE IMAGENS (Image Features) o Propriedades Globais de uma imagem, ou de parte dela (característica global). Por exemplo: Médias
TE073 PDS II Programa de Graduação em Engenharia Elétrica
 TE073 PDS II Programa de Graduação em Engenharia Elétrica Prof. Alessandro Zimmer zimmer@eletrica.ufpr.br www.eletrica.ufpr.br/~zimmer/te073 Processamento Digital de Imagens PDI: Segmentação Os algoritmos
TE073 PDS II Programa de Graduação em Engenharia Elétrica Prof. Alessandro Zimmer zimmer@eletrica.ufpr.br www.eletrica.ufpr.br/~zimmer/te073 Processamento Digital de Imagens PDI: Segmentação Os algoritmos
APLICAÇÃO DE TÉCNICAS DE PROCESSAMENTO DE IMAGENS DIGITAIS EM IMAGENS GERADAS POR ULTRA-SOM
 VIII ERMAC 8 o Encontro Regional de Matemática Aplicada e Computacional 0- de Novembro de 008 Universidade Federal do Rio Grande do Norte Natal/RN APLICAÇÃO DE TÉCNICAS DE PROCESSAMENTO DE IMAGENS DIGITAIS
VIII ERMAC 8 o Encontro Regional de Matemática Aplicada e Computacional 0- de Novembro de 008 Universidade Federal do Rio Grande do Norte Natal/RN APLICAÇÃO DE TÉCNICAS DE PROCESSAMENTO DE IMAGENS DIGITAIS
Processamento de Imagens
 Processamento de Imagens SCC0251 Pré-processamento Material baseado nos livros do Sonka e do Gonzalez http://www.icaen.uiowa.edu/~dip/lecture/lecture.html 1 2 Propriedades de uma Imagem digital Vizinhança
Processamento de Imagens SCC0251 Pré-processamento Material baseado nos livros do Sonka e do Gonzalez http://www.icaen.uiowa.edu/~dip/lecture/lecture.html 1 2 Propriedades de uma Imagem digital Vizinhança
Filtros espaciais (suavizaçào)
") Processamento de Imagens Médicas Filtros espaciais (suavizaçào) Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) 1 Necessidade de pré-processamento 2 Propriedades
Processamento de Imagens Médicas Filtros espaciais (suavizaçào) Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) 1 Necessidade de pré-processamento 2 Propriedades
Processamento de Imagens Marcia A. S. Bissaco
 Engenharia Biomédica Processamento de Imagens Marcia A. S. Bissaco 1 Exemplos filtros Média Mediana Passa_B Passa_A Borda_H Borda_V Sobel_Y Sobel_X Oliveira, Henrique J. Quintino (UMC-SP), 2 Media Mediana
Engenharia Biomédica Processamento de Imagens Marcia A. S. Bissaco 1 Exemplos filtros Média Mediana Passa_B Passa_A Borda_H Borda_V Sobel_Y Sobel_X Oliveira, Henrique J. Quintino (UMC-SP), 2 Media Mediana
Aula 3 Processamento Espacial
 SEL 0449 - Processamento Digital de Imagens Médicas Aula 3 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Processamento Espacial Transformações ponto a ponto
SEL 0449 - Processamento Digital de Imagens Médicas Aula 3 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Processamento Espacial Transformações ponto a ponto
Segmentação de Imagem
 Segmentação de Imagem Em análise de imagem o resultado pretendido não é, geralmente, outra imagem, mas antes uma sua descrição. Essa descrição refere-se, em regra, a partes específicas da imagem ou da
Segmentação de Imagem Em análise de imagem o resultado pretendido não é, geralmente, outra imagem, mas antes uma sua descrição. Essa descrição refere-se, em regra, a partes específicas da imagem ou da
Diego Martin Mancini Orientador: Prof. Paulo A. V. de Miranda Instituto de Matemática e Estatística Universidade de São Paulo
 Estudo de comparação do descritor de imagens coloridas BIC empregando diferentes abordagens de classificação de detecção de bordas: Canny e Operador Laplaciano Diego Martin Mancini Orientador: Prof. Paulo
Estudo de comparação do descritor de imagens coloridas BIC empregando diferentes abordagens de classificação de detecção de bordas: Canny e Operador Laplaciano Diego Martin Mancini Orientador: Prof. Paulo
Processamento Digital de Imagens. Análise de Imagens
 Processamento Digital de Imagens Análise de Imagens Eduardo A. B. da Silva Programa de Engenharia Elétrica - COPPE/UFRJ Laboratório de Sinais, Multimídia e Telecomunicações eduardo@smt.ufrj.br Sergio L.
Processamento Digital de Imagens Análise de Imagens Eduardo A. B. da Silva Programa de Engenharia Elétrica - COPPE/UFRJ Laboratório de Sinais, Multimídia e Telecomunicações eduardo@smt.ufrj.br Sergio L.
FILTRAGEM DE IMAGEM NO DOMÍNIO ESPACIAL (Operações aritméticas orientadas à vizinhança)
") PROCESSAMENTO DE IMAGEM #5 Operações Aritméticas Orientadas à Vizinhanças Filtragem no Domínio Espacial (Máscaras) Máscaras de suavização (média e mediana) e aguçamento (laplaciano) Correlação x Convolução
PROCESSAMENTO DE IMAGEM #5 Operações Aritméticas Orientadas à Vizinhanças Filtragem no Domínio Espacial (Máscaras) Máscaras de suavização (média e mediana) e aguçamento (laplaciano) Correlação x Convolução
2 SIFT (Scale Invariant Feature Transform)
") SIFT (Scale Invariant Feature Transform) O SIFT é um algoritmo de visão computacional proposto e publicado pelo pesquisador David Lowe (Lowe, 1999), professor do departamento de Ciência da Computação na
SIFT (Scale Invariant Feature Transform) O SIFT é um algoritmo de visão computacional proposto e publicado pelo pesquisador David Lowe (Lowe, 1999), professor do departamento de Ciência da Computação na
Detecção de Linhas Através da Transformada de Hough
 Detecção de Linhas Através da Transformada de Hough Jhielson Monitno Pimentel 1, João Carlos Nunes Bittencourt 2, Jody Maick Araujo de Mattos 1, Marcel Ranulfo 1 1 Departamento de Tecnologia Universidade
Detecção de Linhas Através da Transformada de Hough Jhielson Monitno Pimentel 1, João Carlos Nunes Bittencourt 2, Jody Maick Araujo de Mattos 1, Marcel Ranulfo 1 1 Departamento de Tecnologia Universidade
6.1 equações canônicas de círculos e esferas
 6 C Í R C U LO S E E S F E R A S 6.1 equações canônicas de círculos e esferas Um círculo é o conjunto de pontos no plano que estão a uma certa distância r de um ponto dado (a, b). Desta forma temos que
6 C Í R C U LO S E E S F E R A S 6.1 equações canônicas de círculos e esferas Um círculo é o conjunto de pontos no plano que estão a uma certa distância r de um ponto dado (a, b). Desta forma temos que
Operações Pontuais. 1 operando. 2 operandos. Processamento e Análise de Imagem - A. J. Padilha - v ac
 Operações Pontuais 1 operando T OP 2 operandos Pré-Processamento - 1 Operações Pontuais Nas operações pontuais, cada ponto da imagem-resultado - g(i,j) - é obtido por uma transformação T do ponto de coordenadas
Operações Pontuais 1 operando T OP 2 operandos Pré-Processamento - 1 Operações Pontuais Nas operações pontuais, cada ponto da imagem-resultado - g(i,j) - é obtido por uma transformação T do ponto de coordenadas
GEOMETRIC PROPERTY BASED ELLIPSE DETECTION METHOD
 GEOMETRIC PROPERTY BASED ELLIPSE DETECTION METHOD Introdução A detecção de elipse, de forma robusta e confiável, é uma questão fundamental em processamento de imagens, pois que fornece uma ferramenta útil
GEOMETRIC PROPERTY BASED ELLIPSE DETECTION METHOD Introdução A detecção de elipse, de forma robusta e confiável, é uma questão fundamental em processamento de imagens, pois que fornece uma ferramenta útil
CAPÍTULO 4 SEGMENTAÇÃO DE IMAGENS SAR
 CAPÍTULO 4 SEGMENTAÇÃO DE IMAGENS SAR Segundo Gonzales e Wintz (1987), um dos primeiros passos do processo de análise de uma imagem digital consiste em particioná-la em seus elementos constituintes. O
CAPÍTULO 4 SEGMENTAÇÃO DE IMAGENS SAR Segundo Gonzales e Wintz (1987), um dos primeiros passos do processo de análise de uma imagem digital consiste em particioná-la em seus elementos constituintes. O
Processamento Digital de Imagens Aula 04
 exatasfepi.com.br Processamento Digital de Imagens Aula 04 André Luís Duarte A sabedoria oferece proteção, como o faz o dinheiro, mas a vantagem do conhecimento é esta: a sabedoria preserva a vida de quem
exatasfepi.com.br Processamento Digital de Imagens Aula 04 André Luís Duarte A sabedoria oferece proteção, como o faz o dinheiro, mas a vantagem do conhecimento é esta: a sabedoria preserva a vida de quem
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC
 CCI 36 Computação Gráfica Imagens Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC Tópicos da aula - definições básicas: pixel, resolução, profundidade (de cor), formatos
CCI 36 Computação Gráfica Imagens Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC Tópicos da aula - definições básicas: pixel, resolução, profundidade (de cor), formatos
IDENTIFICAÇÃO DE MARCADORES DE PAVIMENTAÇÃO NA ORIENTAÇÃO DE CEGOS. André Zuconelli 1 ; Manassés Ribeiro 2
 IDENTIFICAÇÃO DE MARCADORES DE PAVIMENTAÇÃO NA ORIENTAÇÃO DE CEGOS André Zuconelli 1 ; Manassés Ribeiro 2 INTRODUÇÃO As tecnologias assistivas têm a finalidade de auxiliar pessoas com deficiência a alcançar
IDENTIFICAÇÃO DE MARCADORES DE PAVIMENTAÇÃO NA ORIENTAÇÃO DE CEGOS André Zuconelli 1 ; Manassés Ribeiro 2 INTRODUÇÃO As tecnologias assistivas têm a finalidade de auxiliar pessoas com deficiência a alcançar
A B C A 1 B 1 C 1 A 2 B 2 C 2 é zero (exceto o caso em que as tres retas são paralelas).
.") MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
Dr. Sylvio Barbon Junior. Departamento de Computação - UEL. 1 o Semestre de 2015
 Introdução a Computação Gráfica [5COP100] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre de 2015 Assunto Aula 7 Filtros de Imagens Digitais 2 de 47 Sumário Conceitos Filtragem no
Introdução a Computação Gráfica [5COP100] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre de 2015 Assunto Aula 7 Filtros de Imagens Digitais 2 de 47 Sumário Conceitos Filtragem no
Descritores de Imagens
 Descritores de Imagens André Tavares da Silva PPGCA/UDESC Outubro de 2017 André Tavares da Silva (PPGCA/UDESC) Descritores de Imagens Outubro de 2017 1 / 18 Descritores Locais e Frameworks SIFT SURF Viola-Jones
Descritores de Imagens André Tavares da Silva PPGCA/UDESC Outubro de 2017 André Tavares da Silva (PPGCA/UDESC) Descritores de Imagens Outubro de 2017 1 / 18 Descritores Locais e Frameworks SIFT SURF Viola-Jones
[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações
![[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações](/thumbs/53/31629185.jpg "[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações") [2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações Dr. Sylvio Barbon Junior PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DE ALIMENTOS - UEL 2016 Assunto Aula 4 Segmentação de Imagens 2 de
[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações Dr. Sylvio Barbon Junior PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DE ALIMENTOS - UEL 2016 Assunto Aula 4 Segmentação de Imagens 2 de
MORFOLOGIA MATEMÁTICA
 MORFOLOGIA MATEMÁTICA Morfologia Na Biologia área que trata com a forma e a estrutura de plantas e animais Processamento de Imagens Ferramenta para extração de componentes de imagens que sejam úteis na
MORFOLOGIA MATEMÁTICA Morfologia Na Biologia área que trata com a forma e a estrutura de plantas e animais Processamento de Imagens Ferramenta para extração de componentes de imagens que sejam úteis na
MAT 105- Lista de Exercícios
 1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Objetos Gráficos Planares
 Universidade Federal de Sergipe Departamento de Matemática Objetos Gráficos Planares Profª. Maria Andrade 2016 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
Universidade Federal de Sergipe Departamento de Matemática Objetos Gráficos Planares Profª. Maria Andrade 2016 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
Processamento de Imagem. Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres
 Professora Sheila Cáceres") Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Processamento de Imagens
 Processamento de Imagens SCE 5830 Pré-processamento Material baseado no livro do Sonka e Gonzalez http://www.icaen.uiowa.edu/~dip/lecture/lecture.html Propriedades de uma Imagem digital Vizinhança Conectividade
Processamento de Imagens SCE 5830 Pré-processamento Material baseado no livro do Sonka e Gonzalez http://www.icaen.uiowa.edu/~dip/lecture/lecture.html Propriedades de uma Imagem digital Vizinhança Conectividade
Processamento de Imagens Segmentação
 Processamento de Imagens Segmentação 1 Segmentação Segmentação Análise de Imagem Divisão da imagem em partes fortemente relacionadas aos objetos e áreas do mundo real contidos na imagem Completa: regiões
Processamento de Imagens Segmentação 1 Segmentação Segmentação Análise de Imagem Divisão da imagem em partes fortemente relacionadas aos objetos e áreas do mundo real contidos na imagem Completa: regiões
Filtragem. Processamento digital de imagens. CPGCG/UFPR Prof. Dr. Jorge Centeno
 Filtragem Processamento digital de imagens CPGCG/UFPR Prof. Dr. Jorge Centeno Operações de vizinhança (Filtros) Filtros lineares Filtro passa-baixas (suavização) Filtro passa-altas (realce) Filtros direcionais
Filtragem Processamento digital de imagens CPGCG/UFPR Prof. Dr. Jorge Centeno Operações de vizinhança (Filtros) Filtros lineares Filtro passa-baixas (suavização) Filtro passa-altas (realce) Filtros direcionais
Respostas do Teste de Analise de Imagens :
 Respostas do Teste de Analise de Imagens - 2004: 1Diga com suas palavras o que é: (Valor total da questão: 12) Filtragem passa alta (valor deste item até 0,3) - importante falar que apesar do nome ser
Respostas do Teste de Analise de Imagens - 2004: 1Diga com suas palavras o que é: (Valor total da questão: 12) Filtragem passa alta (valor deste item até 0,3) - importante falar que apesar do nome ser
3 Transformação SIFT (Scale Invariant Feature Transform)
") 3 Transformação SIFT (Scale Invariant Feature Transform) Este capítulo apresenta as seguintes seções: - 3.1 Uma Introdução Sobre Descritores Locais: A técnica SIFT ( Scale Invariant Feature Transform )
3 Transformação SIFT (Scale Invariant Feature Transform) Este capítulo apresenta as seguintes seções: - 3.1 Uma Introdução Sobre Descritores Locais: A técnica SIFT ( Scale Invariant Feature Transform )
5. Detecção de bordas
 5. Detecção de bordas Uma borda, também chamada de edgel, é definida como sendo uma mudança ou descontinuidade local na luminosidade de uma imagem. Classificação : métodos de realce / limiar ( enhancement
5. Detecção de bordas Uma borda, também chamada de edgel, é definida como sendo uma mudança ou descontinuidade local na luminosidade de uma imagem. Classificação : métodos de realce / limiar ( enhancement
Processamento de Imagens
 Processamento de Imagens SCE 5830 Pré-processamento Material baseado no livro do Sonka e Gonzalez http://www.icaen.uiowa.edu/~dip/lecture/lecture.html Propriedades de uma Imagem digital Vizinhança Conectividade
Processamento de Imagens SCE 5830 Pré-processamento Material baseado no livro do Sonka e Gonzalez http://www.icaen.uiowa.edu/~dip/lecture/lecture.html Propriedades de uma Imagem digital Vizinhança Conectividade
UMA VISÃO SOBRE O PROCESSAMENTO DE IMAGENS. Rogério Vargas DCET UESC Home page: rogerio.in
 UMA VISÃO SOBRE O PROCESSAMENTO DE IMAGENS Rogério Vargas DCET UESC Home page: rogerio.in Exemplo de aplicações: automação e visão artificial reconhecimento de caracteres análise de cromossomos veículos
UMA VISÃO SOBRE O PROCESSAMENTO DE IMAGENS Rogério Vargas DCET UESC Home page: rogerio.in Exemplo de aplicações: automação e visão artificial reconhecimento de caracteres análise de cromossomos veículos
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC222 Visão Computacional Clustering Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC ramal 5981 Tópicos da aula Transformada de Hough Clustering de formas Hashing geométrico
CC222 Visão Computacional Clustering Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC ramal 5981 Tópicos da aula Transformada de Hough Clustering de formas Hashing geométrico
CÁLCULO FUNÇÕES DE UMA E VÁRIAS VARIÁVEIS Pedro A. Morettin, Samuel Hazzan, Wilton de O. Bussab.
 Introdução Função é uma forma de estabelecer uma ligação entre dois conjuntos, sujeita a algumas condições. Antes, porém, será exposta uma forma de correspondência mais geral, chamada relação. Sejam dois
Introdução Função é uma forma de estabelecer uma ligação entre dois conjuntos, sujeita a algumas condições. Antes, porém, será exposta uma forma de correspondência mais geral, chamada relação. Sejam dois
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
Processamento de Imagens Filtragem Digital
 Filtragem Digital Consiste na aplicação de técnicas de transformação (operadores máscaras) com o objetivo de corrigir, suavizar ou realçar determinadas características de uma imagem dentro de uma aplicação
Filtragem Digital Consiste na aplicação de técnicas de transformação (operadores máscaras) com o objetivo de corrigir, suavizar ou realçar determinadas características de uma imagem dentro de uma aplicação
Transformada de Hough. Cleber Pivetta Gustavo Mantovani Felipe Zottis
 Transformada de Hough Cleber Pivetta Gustavo Mantovani Felipe Zottis A Transformada de Hough foi desenvolvida por Paul Hough em 1962 e patenteada pela IBM. Originalmente, foi elaborada para detectar características
Transformada de Hough Cleber Pivetta Gustavo Mantovani Felipe Zottis A Transformada de Hough foi desenvolvida por Paul Hough em 1962 e patenteada pela IBM. Originalmente, foi elaborada para detectar características
BCC402 Algoritmos e Programação Avançada Prof. Marco Antonio M. Carvalho Prof. Túlio Ângelo M. Toffolo 2011/1
 BCC402 Algoritmos e Programação Avançada Prof. Marco Antonio M. Carvalho Prof. Túlio Ângelo M. Toffolo 2011/1 Na aula anterior Prova. 2 Na aula de hoje Geometria. 3 A geometria é inerentemente uma disciplina
BCC402 Algoritmos e Programação Avançada Prof. Marco Antonio M. Carvalho Prof. Túlio Ângelo M. Toffolo 2011/1 Na aula anterior Prova. 2 Na aula de hoje Geometria. 3 A geometria é inerentemente uma disciplina
Visão Computacional. Alessandro L. Koerich. Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR)
") Visão Computacional Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) Processamento da Informação Capturei uma Imagem! E agora? Assumindo que
Visão Computacional Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) Processamento da Informação Capturei uma Imagem! E agora? Assumindo que
Fundamentos de Processamento Gráfico. Aula 3. Introdução ao Processamento de Imagens. Profa. Fátima Nunes
 Fundamentos de Processamento Gráfico Aula 3 Introdução ao Processamento de Imagens Profa. Fátima Nunes AULA 3 / 1 Definições Sobre o pixel são definidas algumas relações básicas: vizinhança, conectividade,
Fundamentos de Processamento Gráfico Aula 3 Introdução ao Processamento de Imagens Profa. Fátima Nunes AULA 3 / 1 Definições Sobre o pixel são definidas algumas relações básicas: vizinhança, conectividade,
Objetos Gráficos Planares
 Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Planares Prof. Thales Vieira 2011 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Planares Prof. Thales Vieira 2011 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
Análise Vetorial na Engenharia Elétrica
 nálise Vetorial na Engenharia Elétrica ula 13/03/09 1.3 - Medida algébrica de um segmento Segmento: um segmento é determinado por um par ordenado d de pontos. figura 1.8 apresenta um segmento Figura 1.8
nálise Vetorial na Engenharia Elétrica ula 13/03/09 1.3 - Medida algébrica de um segmento Segmento: um segmento é determinado por um par ordenado d de pontos. figura 1.8 apresenta um segmento Figura 1.8
Cálculo II. Resumo Teórico Completo
 Cálculo II Resumo Teórico Completo Cálculo 2 A disciplina visa estudar funções e gráficos, de forma semelhante a Cálculo 1, mas expande o estudo para funções de mais de uma variável, bem como gráficos
Cálculo II Resumo Teórico Completo Cálculo 2 A disciplina visa estudar funções e gráficos, de forma semelhante a Cálculo 1, mas expande o estudo para funções de mais de uma variável, bem como gráficos
Processamento de Imagem. Prof. MSc. André Yoshimi Kusumoto
 Processamento de Imagem Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Filtragem de Imagens A utilização de filtros tem como objetivo melhorar a qualidade das imagens através da: ampliação
Processamento de Imagem Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Filtragem de Imagens A utilização de filtros tem como objetivo melhorar a qualidade das imagens através da: ampliação
Filtragem. pixel. perfil de linha. Coluna de pixels. Imagem. Linha. Primeiro pixel na linha
 Filtragem As técnicas de filtragem são transformações da imagem "pixel" a "pixel", que dependem do nível de cinza de um determinado "pixel" e do valor dos níveis de cinza dos "pixels" vizinhos, na imagem
Filtragem As técnicas de filtragem são transformações da imagem "pixel" a "pixel", que dependem do nível de cinza de um determinado "pixel" e do valor dos níveis de cinza dos "pixels" vizinhos, na imagem
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
Introdução ao Processamento Digital de Imagens. Aula 6 Propriedades da Transformada de Fourier
 Introdução ao Processamento Digital de Imagens Aula 6 Propriedades da Transformada de Fourier Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Uma linha de uma imagem formada por uma sequência
Introdução ao Processamento Digital de Imagens Aula 6 Propriedades da Transformada de Fourier Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Uma linha de uma imagem formada por uma sequência
Introdução FILTRAGEM NO DOMÍNIO DA FREQUÊNCIA
 FILTRAGEM NO DOMÍNIO DA FREQUÊNCIA Introdução Um sinal no domínio do espaço (x,y) pode ser aproximado através de uma soma de senos e cossenos com frequências (f, f2, f3,...fn) de amplitudes (a, a2,...
FILTRAGEM NO DOMÍNIO DA FREQUÊNCIA Introdução Um sinal no domínio do espaço (x,y) pode ser aproximado através de uma soma de senos e cossenos com frequências (f, f2, f3,...fn) de amplitudes (a, a2,...
Um Sistema para Controle de Qualidade de Medicamentos
 Um Sistema para Controle de Qualidade de Medicamentos Maysa Malfiza Garcia de Macedo 1, Aura Conci 1 1 Instituto de Computação Universidade Federal Fluminense (UFF) Rua Passo da Pátria, 156 - Bloco E -
Um Sistema para Controle de Qualidade de Medicamentos Maysa Malfiza Garcia de Macedo 1, Aura Conci 1 1 Instituto de Computação Universidade Federal Fluminense (UFF) Rua Passo da Pátria, 156 - Bloco E -
MATEMÁTICA I FUNÇÕES. Profa. Dra. Amanda L. P. M. Perticarrari
 MATEMÁTICA I FUNÇÕES Profa. Dra. Amanda L. P. M. Perticarrari amanda.perticarrari@unesp.br Conteúdo Função Variáveis Traçando Gráficos Domínio e Imagem Família de Funções Funções Polinomiais Funções Exponenciais
MATEMÁTICA I FUNÇÕES Profa. Dra. Amanda L. P. M. Perticarrari amanda.perticarrari@unesp.br Conteúdo Função Variáveis Traçando Gráficos Domínio e Imagem Família de Funções Funções Polinomiais Funções Exponenciais
Detecção de falsas correspondências em pares de imagens estereoscópicas utilizando a transformação projetiva no plano e o algoritmo RANSAC
 Detecção de falsas correspondências em pares de imagens estereoscópicas utilizando a transformação projetiva no plano e o algoritmo RANSAC André Caceres Carrilho Mauricio Galo Renato César dos Santos Curitiba,
Detecção de falsas correspondências em pares de imagens estereoscópicas utilizando a transformação projetiva no plano e o algoritmo RANSAC André Caceres Carrilho Mauricio Galo Renato César dos Santos Curitiba,
fig.1 Programa implementado durante a realização do trabalho
 1- INTRODUÇÃO Com este trabalho pretendia-se fazer a extracção de contornos de imagens. Para se poder atingir os objectivos aos quais era proposto, foram implementadas diversas estratégias de detecção
1- INTRODUÇÃO Com este trabalho pretendia-se fazer a extracção de contornos de imagens. Para se poder atingir os objectivos aos quais era proposto, foram implementadas diversas estratégias de detecção
Aula Exemplos diversos. Exemplo 1
 Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
FILTROS NO DOMÍNIO ESPACIAL. Nielsen Castelo Damasceno
 FILTROS NO DOMÍNIO ESPACIAL Nielsen Castelo Damasceno Gerando máscaras de filtragem espacial Algumas vezes pode ser útil expressar a soma de produtos como: = + + = = w são os coeficientes do filtros. z
FILTROS NO DOMÍNIO ESPACIAL Nielsen Castelo Damasceno Gerando máscaras de filtragem espacial Algumas vezes pode ser útil expressar a soma de produtos como: = + + = = w são os coeficientes do filtros. z
Total. UFRGS - INSTITUTO DE MATEMÁTICA Departamento de Matemática Pura e Aplicada MAT Turma A /1 Prova da área I
 UFRG - INTITUTO DE MTEMÁTIC Departamento de Matemática Pura e plicada MT1168 - Turma - 19/1 Prova da área I 1-6 7 8 Total Nome: Ponto extra: ( )Wikipédia ( )presentação ( )Nenhum Tópico: Cartão: Regras
UFRG - INTITUTO DE MTEMÁTIC Departamento de Matemática Pura e plicada MT1168 - Turma - 19/1 Prova da área I 1-6 7 8 Total Nome: Ponto extra: ( )Wikipédia ( )presentação ( )Nenhum Tópico: Cartão: Regras
Aula Distância entre duas retas paralelas no espaço. Definição 1. Exemplo 1
 Aula 1 Sejam r 1 = P 1 + t v 1 t R} e r 2 = P 2 + t v 2 t R} duas retas no espaço. Se r 1 r 2, sabemos que r 1 e r 2 são concorrentes (isto é r 1 r 2 ) ou não se intersectam. Quando a segunda possibilidade
Aula 1 Sejam r 1 = P 1 + t v 1 t R} e r 2 = P 2 + t v 2 t R} duas retas no espaço. Se r 1 r 2, sabemos que r 1 e r 2 são concorrentes (isto é r 1 r 2 ) ou não se intersectam. Quando a segunda possibilidade
SEGEMENTAÇÃO DE IMAGENS. Nielsen Castelo Damasceno
 SEGEMENTAÇÃO DE IMAGENS Nielsen Castelo Damasceno Segmentação Segmentação Representação e descrição Préprocessamento Problema Aquisição de imagem Base do conhecimento Reconhecimento e interpretação Resultado
SEGEMENTAÇÃO DE IMAGENS Nielsen Castelo Damasceno Segmentação Segmentação Representação e descrição Préprocessamento Problema Aquisição de imagem Base do conhecimento Reconhecimento e interpretação Resultado
Construção de uma ferramenta voltada à medicina preventiva para
 Construção de uma ferramenta voltada à medicina preventiva para diagnosticar casos de estrabismo Israel Damásio Medeiros Acadêmico Paulo César Rodacki Gomes - Orientador Roteiro Introdução Fundamentação
Construção de uma ferramenta voltada à medicina preventiva para diagnosticar casos de estrabismo Israel Damásio Medeiros Acadêmico Paulo César Rodacki Gomes - Orientador Roteiro Introdução Fundamentação
Cálculo a Várias Variáveis I - MAT Cronograma para P2: aulas teóricas (segundas e quartas)
") Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Aplicação de Transformadas de Hough na Detecção de Leveduras Viáveis e Inviáveis
 Aplicação de Transformadas de Hough na Detecção de Leveduras Viáveis e Inviáveis Diogo Soares da Silva Prof o. Orientador: Dr. Hemerson Pistori Prof a. Coorientadora: Lia Nara Balta Quinta 12 de junho
Aplicação de Transformadas de Hough na Detecção de Leveduras Viáveis e Inviáveis Diogo Soares da Silva Prof o. Orientador: Dr. Hemerson Pistori Prof a. Coorientadora: Lia Nara Balta Quinta 12 de junho
Universidade Federal do Paraná Departamento de Informática. Reconhecimento de Padrões. Segmentação. Luiz Eduardo S. Oliveira, Ph.D.
 Universidade Federal do Paraná Departamento de Informática Reconhecimento de Padrões Segmentação Luiz Eduardo S. Oliveira, Ph.D. http://lesoliveira.net Objetivos Introduzir os conceitos básicos de segmentação
Universidade Federal do Paraná Departamento de Informática Reconhecimento de Padrões Segmentação Luiz Eduardo S. Oliveira, Ph.D. http://lesoliveira.net Objetivos Introduzir os conceitos básicos de segmentação