CONTROLE DE PROCESSOS MULTIVARIÁVEIS
|
|
|
- Benedita Amado Mendonça
- 5 Há anos
- Visualizações:
Transcrição
1
2 Exemplo: Tambor de flash - V afeta T, P e L - V 2 afeta P e T - V 3 afeta L e P Algumas características dos sistemas multivariáveis: -A interação entre as variáveis influencia a estabilidade e a performance. -O pareamento é uma decisão de projeto. -Em alguns sistemas, o número de manipuladas número de controladas. 2
3 Processos industriais tem várias variáveis que precisam ser controladas. O engenheiro tem que. Indicar onde sensores são necessários 2. Estudar quais variáveis podem ser manipuladas 3. Decidir como as CVs e MVs serão emparelhadas (interligadas via o projeto de controle) Felizmente, a maioria dos métodos vistos até aqui para sistemas SISO se aplicam, mas temos que aprender mais! 3
4 Existem dois enfoques: Vamos nos concentrar no MULTIMALHAS Multimalhas: Vários PIDs independentes F Centralizado T L F T Centralized Controller A A L 4
5 O que é diferente quando nós temos várias MVs e CVs? INTERAÇÃO!! Definição: Um processo multivariável tem interação quando as entradas (manipuladas) afetam várias saídas (controladas). T A Esse processo tem interação? 5
6 Como podemos avaliar quanta interação existe? Um método: - Modelagem Fundamental F A, x A F S, x AS = F M, x AM F F A A + x A Fundamental (nl) F S + = F S F x M AS = F M x AM F ' = F ' + F ' M A S Fundamental linearizado F x F x x ' F F S A ' A A ' AM = 2 A + 2 S ( Fs + FA ) ( Fs + FA ) ss ss 6
7 Como podemos avaliar quanta interação existe? Outro método - Modelagem empírica (resposta ao degrau) Degrau no refluxo com vapor constante XD (mol frac) XB (mol frac) Time (min).35 x Time (min).565 x R (mol/min).3.25 V (mol/min) Time (min) Time (min)
8 Como podemos avaliar quanta interação existe? Outro método - Modelagem empírica (resposta ao degrau) x D ) (.. ) (.. ) ( ) (. ) (. ) (. s F s e s F s e s x s F s e s F s e s x V s R s B V s R s D = + + = F R F V x B 8
9 Como determinar quanta interação existe? Use o modelo; se ele puder ser colocado na forma diagonal, então não há interação. CV K MV CV = K MV CV K MV n 33 3 Se existem elementos ( ) fora da diagonal principal, então existe interação. 9
10 Vemos o diagrama de blocos de um processo típico. Quais são as MVs, CVs, e disturbio, D? F R + + F R (s) G (s) XD(s) F XF q XD FD G 2 (s) G 2 (s) G d (s) G d2 (s) XF(s) F V FRB F RB (s) G 22 (s) + + XB(s) XB FB
11 Caso do reator não isotérmico. Quais são as MVs, CVs, e disturbios, D? v T A Reator G (s) G 2 (s) G 2 (s) + + G d (s) G d2 (s) v2 G 22 (s) + +
12 GRAUS DE LIBERDADE Para um bom projeto é condição necessária: Número de válvulas número de CVs v8 F2 F T T3 T4 v3 T5 F3 T6 F4 F5 P v v2 L v5 v7 v6 T7 L T2 T8 Hot Oil T9 Hot Oil F6 OK, mas isso não garante que podemos controlar as CVs que queremos controlar! 2
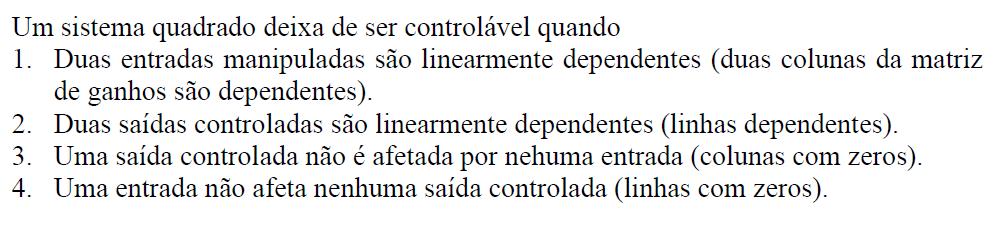
13 CONTROLABILIDADE Um sistema é controlável se as CVs podem ser mantidas nos seus setpoints, no estado estacionário, apesar dos disturbios que entram no sistema. Modelo para sistema 2x2 CV CV 2 = = K K 2 K K 2 22 MV MV 2 + K K d d 2 D Um sistema é controlável quando a matriz de ganhos do processo pode ser invertida, i.e., quando o determinante de K. 3
14 4
15 Para o exemplo da coluna de destilação: F R x D x x D B ( s) =. 747e 2s + 3s 3. 3s F R ( s). 667e 5s + 2s 2s ( s). 73e. 253e ( s ) = FR ( s ) FV ( s ). 7s +. 2s + F V F V x B Det (K) =.54 x -3 Pequeno mas não nulo (os ganhos são pequenos) O sistema é controlável! 5
16 Para o exemplo do CSTR não isotérmico As CVs são controláveis independentemente? Existe interação? v A B -r A = k e -E/RT C A T A A interação é forte Em geral, a temperatura e a conversão podem ser influenciadas independentemente. O sistema é controlável. C B v2 6
17 Para o exemplo do CSTR não isotérmico As CVs são controláveis simultâneamente? Existe interação? v A B -r A = k e -E/RT C A v2 C B T A Ambas as válvulas tem o mesmo efeito sobre as duas variáveis; a única diferença é a magnitude da variação na vazão (µ=constante). C B T K = = K 2 µ K µ K 2 MV MV Det (K) = ; não controlavel! 2 7
18 Para o CSTR com duas reações consecutivas As CVs são controláveis independentemente? Existe interação? A B + 2C -r A = k e -E/RT C A v C B C C A A v2 CB K K2 MV C = C = 2K 2 K 2 MV 2 Det (K) = ; não controlavel! 8
19 VAMOS OBSERVAR O COMPORTAMENTO DINÂMICO. Quantos experimentos são necessários para sintonizar os controladores? 2. Que controlador deve ser implementado primeiro? MV (s) G (s) + + CV (s) G 2 (s) G d (s) D(s) G 2 (s) G d2 (s) MV 2 (s) G 22 (s) + + CV 2 (s) 9
20 Vamos analisar um sistema simples com interação CV (s) CV2 (s) =. s. e. 75e + 2s + 2s. s.. 75 e. e + 2s + 2s. s MV (s) MV2 (s) s ) Vamos usar o emparelhamento com os maiores ganhos: MV (s) CV (s) e MV 2 (s) CV 2 (s) 2
21 Resultados com apenas um controlador (K C = 2., T I = 3) O sistema é estável mas bastante agressivo..5 IAE = 2.53 ISE =.5448 IAE = ISE = CV.5 Feedback control for SP change CV Why did this change? SAM = SSM = SAM = SSM = MV.5 MV Time Time 2
22 Resultados com dois controladors (ambos c/ Kc = 2., TI = 3) O sistema é instável!! As malhas individuais são estáveis 5 IAE = ISE = IAE = ISE = CV CV SAM = SSM = SAM = SSM = MV MV Time Time 22
23 Em geral, o comportamento de uma malha depende da interação e sintonia da(s) outra(s) malha(s). SP (s) - + G c (s) MV (s) G (s) G 2 (s) + + G d (s) CV (s) Lembre que o denominador define a estabilidade. D(s) MV 2 (s) G 2 (s) G d2 (s) SP 2 (s) + G c2 (s) - G 22 (s) + + CV 2 (s) CV (s) SP (s) = numerator(s) + G (s)g (s) + G (s)g (s) + G (s)g (s)[g (s)g (s) G (s)g c c2 22 c c (s)]
24 Em geral, o comportamento de uma malha depende da interação e sintonia da(s) outra(s) malha(s). 4 Single-loop inside the dashed lines would be stable. Obs: Kc2, LOOP 2 CONTROLLER GAIN 3 2 Stable for 2x2 Unstable for 2x2. TI = 3 para os dois controladores 2. KC < 3.75 estavel para as malhas individualmente 3. KC = 2. estavel para uma malha só 4. KC = 2. instável para as duas malhas juntas!! Kc, LOOP CONTROLLER GAIN 5. Esses resultados são para o exemplo mostrado mas os 24 conceitos são gerais
25 Se as duas CVs tem a mesma importância, afrouxamos os dois controladores igualmente. (Kc = Kc2 =.95; TI = TI2 = 3.) IAE = ISE = IAE = ISE =.47 CV Um pouco lento para chegar no SP CV Efeito da interação em CV SAM = SSM = 8.89 SAM =.734 SSM = MV.5 MV Time Time 25
26 Se CV é mais importante, tornamos Gc mais agressive e Gc2 mais frouxo. (Kc =.4 and Kc2 =.5; TI = TI2 = 3.) IAE = ISE = IAE =.2283 ISE = 3.23 CV Resposta mais rápida em direção ao SP CV Aumenta o efeito da interação SAM = SSM = SAM =.763 SSM = MV.5.5 MV Time Time 26
27 Se CV2 é mais importante, tornamos Gc2 mais agressivo e Gc mais frouxo. (Kc =.5 and Kc2 =.4; TI = TI2 = 3.) IAE = ISE = IAE = ISE =.3957 CV Muito lento p/ chegar a SP CV Menor disturbio devido à interação SAM = SSM = SAM =.763 SSM = MV.5.5 MV Time Time 27
28 28
29 29
30 3
31 3
32 32
33 Exercícios 33
34 Exercícios 34
35 Exercícios 35
36 36
ESTABILIDADE & SINTONIA
 ESTABILIDADE & SINTONIA MV ( t ) = d CV K c E ( t ) + E ( t') dt' T d + TI dt I 2 v TC No! -2-4 2 4 6 8 2 or v2 Yes!.8.6.4.2 Nós afetamos a estabilidade quando implementamos o controle. Como garantir a
ESTABILIDADE & SINTONIA MV ( t ) = d CV K c E ( t ) + E ( t') dt' T d + TI dt I 2 v TC No! -2-4 2 4 6 8 2 or v2 Yes!.8.6.4.2 Nós afetamos a estabilidade quando implementamos o controle. Como garantir a
ESTABILIDADE & SINTONIA
 ESTABILIDADE & SINTONIA MV ( t ) = d CV K c E ( t ) + E ( t') dt' T d + TI 0 dt I 20 v TC No! 0-20 -40 0 20 40 60 80 00 20 or v2 Yes! 0.8 0.6 0.4 0.2 0 Nós afetamos a estabilidade quando implementamos
ESTABILIDADE & SINTONIA MV ( t ) = d CV K c E ( t ) + E ( t') dt' T d + TI 0 dt I 20 v TC No! 0-20 -40 0 20 40 60 80 00 20 or v2 Yes! 0.8 0.6 0.4 0.2 0 Nós afetamos a estabilidade quando implementamos
PQI-2407 Controle de Processos da Indústria Química Exercícios Lista 1
 PQI-2407 Controle de Processos da Indústria Química Exercícios Lista 1 1- Apresente as vantagens de uma casa de controle centralizada. Você vê alguma desvantagem? 2- Considere os sistemas representados
PQI-2407 Controle de Processos da Indústria Química Exercícios Lista 1 1- Apresente as vantagens de uma casa de controle centralizada. Você vê alguma desvantagem? 2- Considere os sistemas representados
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS. Controle em Cascata. Sumário
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS Prof a Ninoska Bojorge Sumário 2 Introdução Características Diagrama de Blocos do Conceitos Aplicações Critério
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS Prof a Ninoska Bojorge Sumário 2 Introdução Características Diagrama de Blocos do Conceitos Aplicações Critério
Departamento de Engenharia Química e de Petróleo UFF. Outros Processos de Separação. Sistemas de Controle Multivariáveis: Uma Introdução
 Departamento de Engenharia Química e de Petróleo FF custo Outros Processos de Separação Sistemas de Controle Multivariáveis: ma Introdução Prof a Ninoska Bojorge Controle de Processos Multivariáveis Controle
Departamento de Engenharia Química e de Petróleo FF custo Outros Processos de Separação Sistemas de Controle Multivariáveis: ma Introdução Prof a Ninoska Bojorge Controle de Processos Multivariáveis Controle
IDENTIFICAÇÃO DE PARÂMETROS DE CONTROLE PID EM PROCESSO COM CSTR NÃO ISOTÉRMICO
 IDENTIFICAÇÃO DE PARÂMETROS DE CONTROLE PID EM PROCESSO COM CSTR NÃO ISOTÉRMICO Polyana Gomes de Aguiar 1 *, Daiane Ribeiro Dias 1, Annanda Alkmim Alves 1, Mariana Oliveira Marques 1, Saulo Vidal 1 1 Instituto
IDENTIFICAÇÃO DE PARÂMETROS DE CONTROLE PID EM PROCESSO COM CSTR NÃO ISOTÉRMICO Polyana Gomes de Aguiar 1 *, Daiane Ribeiro Dias 1, Annanda Alkmim Alves 1, Mariana Oliveira Marques 1, Saulo Vidal 1 1 Instituto
CAPÍTULO 8: O CONTROLADOR PID
 CAPÍTULO 8: O CONTROLADOR PID Quando eu terminar este capítulo eu quero ser capaz de completar o seguinte Conhecer os pontos fortes e fracos do controle PID Determinar o modelo do sistema feedback utilizando
CAPÍTULO 8: O CONTROLADOR PID Quando eu terminar este capítulo eu quero ser capaz de completar o seguinte Conhecer os pontos fortes e fracos do controle PID Determinar o modelo do sistema feedback utilizando
5. Sistemas de controlo em aneis múltiplos e multivariável (MIMO)
") 5. Sistemas de controlo em aneis múltiplos e multivariável (MIMO) Sistemas Multivariáveis: várias abordagens Interacção Selecção de aneis de controlo RA RD Análise de Controlabilidade Análise de Valores
5. Sistemas de controlo em aneis múltiplos e multivariável (MIMO) Sistemas Multivariáveis: várias abordagens Interacção Selecção de aneis de controlo RA RD Análise de Controlabilidade Análise de Valores
Controle Básico Realimentado (Feedback)
") Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS Introdução ao Controle Antecipatório (Feedforward control) Prof a Ninoska Bojorge Controle Básico Realimentado
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS Introdução ao Controle Antecipatório (Feedforward control) Prof a Ninoska Bojorge Controle Básico Realimentado
MALHA EM FEEDBACK. Temos que entender os elementos da malha porque afetam segurânça, precisão, dinâmica i e custo! 4-20 ma T ma.
 MALHA EM FEEDBACK Temos que entender os elementos da malha orque afetam segurânça, recisão, dinâmica i e custo! v1 4-20 ma T A 4-20 ma v2 3-15 si 1 MALHA EM FEEDBACK Sensor & transmissor conversor A/D
MALHA EM FEEDBACK Temos que entender os elementos da malha orque afetam segurânça, recisão, dinâmica i e custo! v1 4-20 ma T A 4-20 ma v2 3-15 si 1 MALHA EM FEEDBACK Sensor & transmissor conversor A/D
Lista de Exercícios Controle de Processos 2
 Lista de Exercícios Controle de Processos 2 Ronaldo DEQ/UFSCar 1) Alguns sistemas de controle multimalhas são apresentados a seguir Para cada um deles, explique se o mesmo está correto e funcionará; isto
Lista de Exercícios Controle de Processos 2 Ronaldo DEQ/UFSCar 1) Alguns sistemas de controle multimalhas são apresentados a seguir Para cada um deles, explique se o mesmo está correto e funcionará; isto
Capítulo 7 Controle em cascata
 Capítulo 7 Exemplo de processo Pré-aquecedor e reator: O objetivo é controlar a temperatura no interior do reator. O reagente A é pré-aquecido na fornalha e deve atingir um valor adequado para a reação.
Capítulo 7 Exemplo de processo Pré-aquecedor e reator: O objetivo é controlar a temperatura no interior do reator. O reagente A é pré-aquecido na fornalha e deve atingir um valor adequado para a reação.
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS. Controle em Cascata. Sumário
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS Prof a Ninoska Bojorge Sumário 2 Introdução Características Diagrama de Blocos do Conceitos Aplicações Critério
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ102- CONTROLE DE PROCESSOS Prof a Ninoska Bojorge Sumário 2 Introdução Características Diagrama de Blocos do Conceitos Aplicações Critério
Curso de Instrumentista de Sistemas. Fundamentos de Controle. Prof. Msc. Jean Carlos
 Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Fundamentos de Controle Aula_05 Na última aula... Método da tentativa sistemática ganho do controlador no valor mínimo
Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Fundamentos de Controle Aula_05 Na última aula... Método da tentativa sistemática ganho do controlador no valor mínimo
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
PMR3404 Controle I Aula 3
 PMR3404 Controle I Aula 3 Resposta estática Ações de controle PID Newton Maruyama 23 de março de 2017 PMR-EPUSP Classificação de sistemas de acordo com o seu desempenho em regime estático Seja o seguinte
PMR3404 Controle I Aula 3 Resposta estática Ações de controle PID Newton Maruyama 23 de março de 2017 PMR-EPUSP Classificação de sistemas de acordo com o seu desempenho em regime estático Seja o seguinte
Controle de Processos Aula: Controle Antecipatório (Alimentação ou Feedforward)
") 107484 Controle de Processos Aula: Controle Antecipatório (Alimentação ou Feedforward) Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 Recapitulando
107484 Controle de Processos Aula: Controle Antecipatório (Alimentação ou Feedforward) Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 Recapitulando
LISTA /1. a) Quanto maior o tempo morto, maior deverá ser a ação b) Quanto maior o ganho do processo menor deverá ser o ganho do controlador.
 Quanto maior o tempo morto, maior deverá ser a ação b) Quanto maior o ganho do processo menor deverá ser o ganho do controlador.") LISTA 006/ ) (005/, PARTE A) Um sistema dinâmico é modelado por função de transferência de primeira ordem com tempo morto. Comente sobre as seguintes afirmativas: a) Quanto maior o tempo morto, maior deverá
LISTA 006/ ) (005/, PARTE A) Um sistema dinâmico é modelado por função de transferência de primeira ordem com tempo morto. Comente sobre as seguintes afirmativas: a) Quanto maior o tempo morto, maior deverá
APLICAÇÃO DAS TÉCNICAS SVD E RGA NO PROJETO DE MALHAS DE CONTROLE
 APLICAÇÃO DAS TÉCNICAS SVD E RGA NO PROJETO DE MALHAS DE CONTROLE 1 Deborah Almeida dos Anjos; 2 José Nilton Silva 1,2 Universidade Federal de Campina Grande, 1 Programa de Pós Graduação em Engenharia
APLICAÇÃO DAS TÉCNICAS SVD E RGA NO PROJETO DE MALHAS DE CONTROLE 1 Deborah Almeida dos Anjos; 2 José Nilton Silva 1,2 Universidade Federal de Campina Grande, 1 Programa de Pós Graduação em Engenharia
Prova 2 (Parte Computacional)
") Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 169536 - Tópicos em Controle e Automação: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Tognetti Prova 2 (Parte
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 169536 - Tópicos em Controle e Automação: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Tognetti Prova 2 (Parte
Lista de Exercícios 1
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2015 Lista de Exercícios 1 Para os exercícios abaixo considere (exceto se
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2015 Lista de Exercícios 1 Para os exercícios abaixo considere (exceto se
Controle de Processos Aula: Controle em Cascata
 107484 Controle de Processos Aula: Controle em Cascata Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 (Exemplo) CONTROLE DE UM REATOR Realimentação
107484 Controle de Processos Aula: Controle em Cascata Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 (Exemplo) CONTROLE DE UM REATOR Realimentação
Ronaldo Guimarães Corrêa. Aula #2: Configurações de Controle
 Ronaldo Guimarães Corrêa Aula #2: Configurações de Controle São Carlos 2012 Colunas de Destilação O grande volume de ĺıquido acumulado nos pratos da coluna, refervedor e condensador tornam a resposta do
Ronaldo Guimarães Corrêa Aula #2: Configurações de Controle São Carlos 2012 Colunas de Destilação O grande volume de ĺıquido acumulado nos pratos da coluna, refervedor e condensador tornam a resposta do
PROJETO DA MALHA DE CONTROLE DE UM PROCESSO DE HIDRÓLISE DE ANIDRIDO ACÉTICO EM CSTR
 PROJETO DA MALHA DE CONTROLE DE UM PROCESSO DE HIDRÓLISE DE ANIDRIDO ACÉTICO EM CSTR A. C. S. R. DIAS, B. R. BOTINHA, J. R. COSTA, C. S. O. TENIS e J. C. S. DUTRA LAMCES Laboratório de Métodos Computacionais,
PROJETO DA MALHA DE CONTROLE DE UM PROCESSO DE HIDRÓLISE DE ANIDRIDO ACÉTICO EM CSTR A. C. S. R. DIAS, B. R. BOTINHA, J. R. COSTA, C. S. O. TENIS e J. C. S. DUTRA LAMCES Laboratório de Métodos Computacionais,
PQI-2407 CONTROLE DE PROCESSOS QUÍMICOS. Professor: Darci Odloak Ano: 2009
 PQI-407 CONTROLE DE PROCESSOS QUÍMICOS Professor: Darci Odloak no: 009 1 PQI-407 CONTROLE DE PROCESSOS QUÍMICOS O objetivo é introduzir os conceitos básicos para o entendimento das malhas de controle Porque
PQI-407 CONTROLE DE PROCESSOS QUÍMICOS Professor: Darci Odloak no: 009 1 PQI-407 CONTROLE DE PROCESSOS QUÍMICOS O objetivo é introduzir os conceitos básicos para o entendimento das malhas de controle Porque
Controle em Cascata. TCA: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Universidade de Brasília Depto. Engenharia Elétrica
 Controle em Cascata TCA: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Universidade de Brasília Depto. Engenharia Elétrica (Exemplo) CONTROLE DE UM REATOR Realimentação Simples O Processo Reação
Controle em Cascata TCA: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Universidade de Brasília Depto. Engenharia Elétrica (Exemplo) CONTROLE DE UM REATOR Realimentação Simples O Processo Reação
Capítulo 12. Projeto no Espaço de Estados
 Capítulo 12 Projeto no Espaço de Estados Fig. 12.1 Sistema de automação para farmácia hospitalar mostrando um robô selecionando medicamentos a serem depositados em bandejas personalizadas dos pacientes
Capítulo 12 Projeto no Espaço de Estados Fig. 12.1 Sistema de automação para farmácia hospitalar mostrando um robô selecionando medicamentos a serem depositados em bandejas personalizadas dos pacientes
Controle de Processos Aula: Controle Seletivo, Split-Range, Gain- Scheduled e Inferencial
 107484 Controle de Processos Aula: Controle Seletivo, Split-Range, Gain- Scheduled e Inferencial Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 Controle
107484 Controle de Processos Aula: Controle Seletivo, Split-Range, Gain- Scheduled e Inferencial Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 Controle
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2015 Lista de Exercícios 2 Para os exercícios abaixo considere (exceto se
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2015 Lista de Exercícios 2 Para os exercícios abaixo considere (exceto se
Controle de Processos Aula: Controle em Cascata
 107484 Controle de Processos Aula: Controle em Cascata Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 (Exemplo) CONTROLE DE UM REATOR Realimentação
107484 Controle de Processos Aula: Controle em Cascata Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 (Exemplo) CONTROLE DE UM REATOR Realimentação
Sintonia do compensador PID
 Sintonia do compensador PID 0.1 Introdução DAELN - UTFPR - Controle I Paulo Roberto Brero de Campos Neste capítulo será estudado um problema muito comum na indústria que consiste em fazer o ajuste dos
Sintonia do compensador PID 0.1 Introdução DAELN - UTFPR - Controle I Paulo Roberto Brero de Campos Neste capítulo será estudado um problema muito comum na indústria que consiste em fazer o ajuste dos
Aula 8. Cristiano Quevedo Andrea 1. Curitiba, Abril de DAELT - Departamento Acadêmico de Eletrotécnica
 Classificaçã dos Sistemas de Controle Especificaçõe do Estado Estacionário de Erro Aula 8 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico
Classificaçã dos Sistemas de Controle Especificaçõe do Estado Estacionário de Erro Aula 8 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico
Ações de controle básicas: uma análise do desempenho em regime
 Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Capítulo 3 Ações de controle básicas: uma análise do desempenho em regime estático 3. Introdução Neste capítulo, as ações de controle básicas utilizadas em controladores industriais e o seu desempenho
Controle de Processos Aula: Controle com restrições (Override)
") 107484 Controle de Processos Aula: Controle com restrições (Override) Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 Controle override (com restrições)
107484 Controle de Processos Aula: Controle com restrições (Override) Prof. Eduardo Stockler Departamento de Engenharia Elétrica Universidade de Brasília 1º Semestre 2015 Controle override (com restrições)
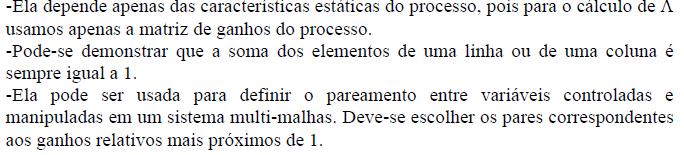
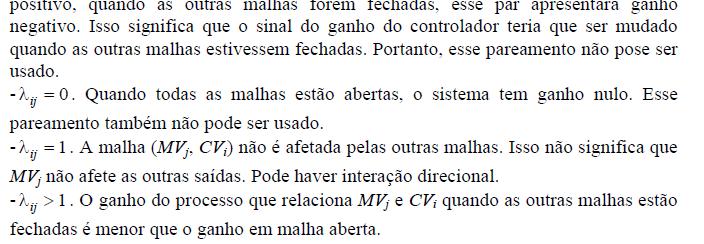
Ronaldo Guimarães Corrêa. Aula #4: Matriz do Ganho Relativo (RGA)
") Ronaldo Guimarães orrêa Aula #4: Matriz do Ganho Relativo RGA São arlos 2005 Introduçã o No projeto de controladores multivariáveis, uma possibilidade é utilizar múltiplos controladores de malha simples,
Ronaldo Guimarães orrêa Aula #4: Matriz do Ganho Relativo RGA São arlos 2005 Introduçã o No projeto de controladores multivariáveis, uma possibilidade é utilizar múltiplos controladores de malha simples,
Controlador PID: algoritmo, estrutura e sintonia
 Controlador PID: algoritmo, estrutura e sintonia Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 05 de setembro de 2018. Sumário 1 Introdução
Controlador PID: algoritmo, estrutura e sintonia Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 05 de setembro de 2018. Sumário 1 Introdução
TEQ Sistemas de Instrumentação e Controle de Processos Lista de Exercícios nº 4 RESPOSTAS
 TEQ00141- Sistemas de Instrumentação e Controle de Processos Lista de Exercícios nº 4 RESPOSTAS 1. Selecione e Justifique qual o efeito de cada modo do controlador PID sobre o off-set em regime estacionário
TEQ00141- Sistemas de Instrumentação e Controle de Processos Lista de Exercícios nº 4 RESPOSTAS 1. Selecione e Justifique qual o efeito de cada modo do controlador PID sobre o off-set em regime estacionário
Lista de Figuras. Capitulo 1. Capitulo 2. Capitulo 3
 Capitulo 1 Figura 1.1 Esquema simplificado da RTC 5 Figura 1.2 Trocador de calor do tipo casco tubo: Estrutura interna simplificada 7 Figura 1.3 Reator com e sem integração energética 8 Capitulo 2 Figura
Capitulo 1 Figura 1.1 Esquema simplificado da RTC 5 Figura 1.2 Trocador de calor do tipo casco tubo: Estrutura interna simplificada 7 Figura 1.3 Reator com e sem integração energética 8 Capitulo 2 Figura
Controle Antecipatório (Alimentação ou Feedforward)
") Controle Antecipatório (Alimentação ou Feedforward) TCA: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Universidade de Brasília Depto. Engenharia Elétrica Recapitulando o conceito O controle antecipatório
Controle Antecipatório (Alimentação ou Feedforward) TCA: Controle de Processos 2S / 2012 Prof. Eduardo Stockler Universidade de Brasília Depto. Engenharia Elétrica Recapitulando o conceito O controle antecipatório
7- Projeto de Controladores Feedback
 7- Projeto de Controladores Feedback Neste capítulo vamos tentar responder às seguintes perguntas: Como selecionamos o tipo de controlador feedback (ou seja, P, PI ou PID) e como ajustamos os parâmetros
7- Projeto de Controladores Feedback Neste capítulo vamos tentar responder às seguintes perguntas: Como selecionamos o tipo de controlador feedback (ou seja, P, PI ou PID) e como ajustamos os parâmetros
Pelo gráfico pode-se perceber que existe atraso na resposta, portanto o modelo adequado é o de 1ª ordem mais tempo morto, que se dá por:
 TEQ00 - Lista 3 Controle de Processos Monitoria º Semestre 013 Resolução 1- a) Pelo gráfico pode-se perceber que existe atraso na resposta, portanto o modelo adequado é o de 1ª ordem mais tempo morto,
TEQ00 - Lista 3 Controle de Processos Monitoria º Semestre 013 Resolução 1- a) Pelo gráfico pode-se perceber que existe atraso na resposta, portanto o modelo adequado é o de 1ª ordem mais tempo morto,
5.1 INTRODUÇÃO AO SISTEMA DE CONTROLE GAIN SCHEDULING
 54 5. SISTEMA DE CONTROLE GAIN SCHEDULING 5.1 INTRODUÇÃO AO SISTEMA DE CONTROLE GAIN SCHEDULING O sistema de controle tipo gain scheduling [14] é um sistema adaptativo [15], onde os parâmetros do controlador
54 5. SISTEMA DE CONTROLE GAIN SCHEDULING 5.1 INTRODUÇÃO AO SISTEMA DE CONTROLE GAIN SCHEDULING O sistema de controle tipo gain scheduling [14] é um sistema adaptativo [15], onde os parâmetros do controlador
Tipos de Malha de Controle de Processos Industriais
 Tipos de Malha de Controle de Processos Industriais Sempre que surgir uma oscilação no sistema, o controlador será capaz de atuar sobre o erro entre o setpoint e o valor da variável controlada e eliminá-lo.
Tipos de Malha de Controle de Processos Industriais Sempre que surgir uma oscilação no sistema, o controlador será capaz de atuar sobre o erro entre o setpoint e o valor da variável controlada e eliminá-lo.
Mario Campos, Dr.ECP PETROBRÁS/CENPES. Engenharia Básica em Automação e Otimização de Processos (EB/AOT)
") Controle Regulatório Avançado e Sintonia de Controladores PID Mario Campos, Dr.ECP PETROBRÁS/CENPES Engenharia Básica em Automação e Otimização de Processos (EB/AOT) e-mail: mariocampos@petrobras petrobras.com..com.br
Controle Regulatório Avançado e Sintonia de Controladores PID Mario Campos, Dr.ECP PETROBRÁS/CENPES Engenharia Básica em Automação e Otimização de Processos (EB/AOT) e-mail: mariocampos@petrobras petrobras.com..com.br
3.1 INTRODUÇÃO AOS MODELOS LINEARIZADOS DA COLUNA DE DESTILAÇÃO
 Modelagem da coluna de destilação 38 3 MODELAGEM DA COLUNA DE DESTILAÇÃO 3.1 INTRODUÇÃO AOS MODELOS LINEARIZADOS DA COLUNA DE DESTILAÇÃO A coluna de destilação utilizada neste trabalho apresenta uma dinâmica
Modelagem da coluna de destilação 38 3 MODELAGEM DA COLUNA DE DESTILAÇÃO 3.1 INTRODUÇÃO AOS MODELOS LINEARIZADOS DA COLUNA DE DESTILAÇÃO A coluna de destilação utilizada neste trabalho apresenta uma dinâmica
6. O SISTEMA DE CONTROLE COMO FERRAMENTA DIDÁTICA
 71 6. O SISTEMA DE CONTROLE COMO FERRAMENTA DIDÁTICA 6.1 SOFTWARE DIDÁTICO O sistema de controle que compreende um software didático e um hardware de aquisição de dados, poderá servir como ferramenta didática
71 6. O SISTEMA DE CONTROLE COMO FERRAMENTA DIDÁTICA 6.1 SOFTWARE DIDÁTICO O sistema de controle que compreende um software didático e um hardware de aquisição de dados, poderá servir como ferramenta didática
Disciplina: Instrumentação e Controle de Sistemas Mecânicos. Teoria de Controle Parte 1
 Disciplina: Instrumentação e Controle de Sistemas Mecânicos Teoria de Controle Parte 1 Objetivos do Controle Independente do estágio tecnológico ou da complexidade de um processo de fabricação, são sempre
Disciplina: Instrumentação e Controle de Sistemas Mecânicos Teoria de Controle Parte 1 Objetivos do Controle Independente do estágio tecnológico ou da complexidade de um processo de fabricação, são sempre
Teoria de Controle. Helio Voltolini
 Teoria de Controle Helio Voltolini Conteúdo programático Introdução aos sistemas de controle; Modelagem matemática de sistemas dinâmicos; Resposta transitória de sistemas de controle; Estabilidade dos
Teoria de Controle Helio Voltolini Conteúdo programático Introdução aos sistemas de controle; Modelagem matemática de sistemas dinâmicos; Resposta transitória de sistemas de controle; Estabilidade dos
Sintonia de Controladores PID
 Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
Instrumentação Básica
 Instrumentação Básica 20/02/2017 1 Índice Capitulo I - Fundamentos O que é Instrumentação O Processo e suas Variáveis Malha de Controle Classes de Instrumentos Terminologia Fluxogramas de Processos Sistemas
Instrumentação Básica 20/02/2017 1 Índice Capitulo I - Fundamentos O que é Instrumentação O Processo e suas Variáveis Malha de Controle Classes de Instrumentos Terminologia Fluxogramas de Processos Sistemas
Departamento de Engenharia Química e de Petróleo UFF. Outros Processos de Separação Técnicas de Controle Avançado
 Departamento de Engenharia Química e de Petróleo UFF custo Outros Processos de Separação Técnicas de Controle Avançado Prof a Ninoska Bojorge Introdução Será abordado alguns componentes chaves de simples
Departamento de Engenharia Química e de Petróleo UFF custo Outros Processos de Separação Técnicas de Controle Avançado Prof a Ninoska Bojorge Introdução Será abordado alguns componentes chaves de simples
Realimentação de Estado Sistemas SISO
 1. Realimentação de Estado para Sistemas SISO pag.1 Teoria de Sistemas Lineares Aula 18 Considere o sistema n dimensional, SISO: ẋ = Ax + bu y = cx Na realimentação de estados, a entrada u é dada por u
1. Realimentação de Estado para Sistemas SISO pag.1 Teoria de Sistemas Lineares Aula 18 Considere o sistema n dimensional, SISO: ẋ = Ax + bu y = cx Na realimentação de estados, a entrada u é dada por u
Introdução a Disciplina de Controle Supervisório. Prof. Leandro Castilho Brolin
 AULA 12 - LTC36B Introdução a Disciplina de Controle Supervisório Prof. Leandro Castilho Brolin UTFPR - Universidade Tecnológica Federal do Paraná DAELN Departamento de Eletrônica RESUMO (1) Controle por
AULA 12 - LTC36B Introdução a Disciplina de Controle Supervisório Prof. Leandro Castilho Brolin UTFPR - Universidade Tecnológica Federal do Paraná DAELN Departamento de Eletrônica RESUMO (1) Controle por
Exercício #3 Controle de Processos Químicos
 Exercício #3 Controle de Processos Químicos Ronaldo 1. estabeleça uma configuração de controle para o sistema (a) calcule o número de graus de liberdade para o controle a partir do modelo não-linear sugerido
Exercício #3 Controle de Processos Químicos Ronaldo 1. estabeleça uma configuração de controle para o sistema (a) calcule o número de graus de liberdade para o controle a partir do modelo não-linear sugerido
GUIDELINES DE CONTROLADORES PID PARA CICLO DE REFRIGERAÇÃO INDUSTRIAL
 GUIDELINES DE CONTROLADORES PID PARA CICLO DE REFRIGERAÇÃO INDUSTRIAL S. B. B. L. VILLAR 1, T. G. NEVES 1, J. I. H. T. NETO 2 e A. C. B. ARAÚJO 1 1 Universidade Federal de Campina Grande, Unidade Acadêmica
GUIDELINES DE CONTROLADORES PID PARA CICLO DE REFRIGERAÇÃO INDUSTRIAL S. B. B. L. VILLAR 1, T. G. NEVES 1, J. I. H. T. NETO 2 e A. C. B. ARAÚJO 1 1 Universidade Federal de Campina Grande, Unidade Acadêmica
Fundamentos de Automação. Controle de Processos
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Controle
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Controle
A localização dos pólos de uma função de transferência nos dá o primeiro critério para checar a estabilidade do sistema.
 ONTROLE DE ROESSOS & UTOMÇÃO INDUSTRIL 47 0 - ESTBILIDDE omo definiremos se um sistema é instável ou estável? Há diferentes maneiras, dependendo do rigorismo matemático da definição e de sua utilidade
ONTROLE DE ROESSOS & UTOMÇÃO INDUSTRIL 47 0 - ESTBILIDDE omo definiremos se um sistema é instável ou estável? Há diferentes maneiras, dependendo do rigorismo matemático da definição e de sua utilidade
1 Sistema Máquina-Barra in nita: apresentação e modelagem
 EEL 751 - Fundamentos de Controle 1o rabalho Computacional 1 Sistema Máquina-Barra in nita: apresentação e modelagem Modelos do tipo máquina-barra in nita como o representado pelo diagrama uni - lar da
EEL 751 - Fundamentos de Controle 1o rabalho Computacional 1 Sistema Máquina-Barra in nita: apresentação e modelagem Modelos do tipo máquina-barra in nita como o representado pelo diagrama uni - lar da
Controle de Processos Aula: Ações de Controle
 Aula 7484 Controle de Processos Aula: Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB o Semestre 26 E. S. Tognetti UnB) Controle de processos / Ação proporcional
Aula 7484 Controle de Processos Aula: Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB o Semestre 26 E. S. Tognetti UnB) Controle de processos / Ação proporcional
Laboratório 08: Prática de Identificação de Sistemas e Projeto de Controlador
 UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CURSO DE ENGENHARIA ELÉTRICA INTRODUÇÃO AOS SISTEMAS DE CONTROLE EXPERIMENTAL PROFESSOR: ANTONIO SILVEIRA Laboratório 08: Prática de Identificação de Sistemas
UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CURSO DE ENGENHARIA ELÉTRICA INTRODUÇÃO AOS SISTEMAS DE CONTROLE EXPERIMENTAL PROFESSOR: ANTONIO SILVEIRA Laboratório 08: Prática de Identificação de Sistemas
MODELAGEM E CONTROLE DE UM TROCADOR DE CALOR FEIXE TUBULAR
 PAULO ALEXANDRE MARTIN MODELAGEM E CONTROLE DE UM TROCADOR DE CALOR FEIXE TUBULAR Dissertação apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do título de Mestre em Engenharia.
PAULO ALEXANDRE MARTIN MODELAGEM E CONTROLE DE UM TROCADOR DE CALOR FEIXE TUBULAR Dissertação apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do título de Mestre em Engenharia.
Heurísticas para Projeto de Estruturas de Controle
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA QUÍMICA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA QUÍMICA Heurísticas para Projeto de Estruturas de Controle DISSERTAÇÃO
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA QUÍMICA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA QUÍMICA Heurísticas para Projeto de Estruturas de Controle DISSERTAÇÃO
Controle de Processos Aula: Sistema em malha fechada
 107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
Controle de Processos Aula: Sistema em malha fechada
 107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2017 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2017 E. S. Tognetti (UnB) Controle
Introdução (repassando Conceitos de aulas anteriores)
") Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ- CONTROLE DE PROCESSOS custo SINTONIA DE MALHAS DE CONTROLE Prof a Ninoska Bojorge Introdução (repassando Conceitos de aulas anteriores)
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ- CONTROLE DE PROCESSOS custo SINTONIA DE MALHAS DE CONTROLE Prof a Ninoska Bojorge Introdução (repassando Conceitos de aulas anteriores)
Introdução: Sistemas de Controle Realimentados
 Introdução: Sistemas de Controle Realimentados ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 11 de janeiro de 2016 Prof. Tito Luís Maia Santos
Introdução: Sistemas de Controle Realimentados ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 11 de janeiro de 2016 Prof. Tito Luís Maia Santos
SERIA REAL-TIME OPTIMIZATION O LIMITE SUPERIOR PARA SELF-OPTIMIZING CONTROL?
 SERIA REAL-TIME OPTIMIZATION O LIMITE SUPERIOR PARA SELF-OPTIMIZING CONTROL? E. SCHULTZ e M. FARENZENA Grupo de Intensificação, Modelagem, Simulação, Controle e Otimização de Processos (GIMSCOP), Departamento
SERIA REAL-TIME OPTIMIZATION O LIMITE SUPERIOR PARA SELF-OPTIMIZING CONTROL? E. SCHULTZ e M. FARENZENA Grupo de Intensificação, Modelagem, Simulação, Controle e Otimização de Processos (GIMSCOP), Departamento
Ao meu co-orientador, Prof. Fábio Gonçalves Jota, pela sua importante ajuda e pelos conhecimento transmitidos sempre com coerência.
 Agradecimentos A Deus, por ter sido uma fonte de luz, sabedoria e inspiração, me fortalecendo cada vez mais a cada obstáculo e me conduzindo sempre pelos melhores caminhos. À minha orientadora, Prof a.
Agradecimentos A Deus, por ter sido uma fonte de luz, sabedoria e inspiração, me fortalecendo cada vez mais a cada obstáculo e me conduzindo sempre pelos melhores caminhos. À minha orientadora, Prof a.
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE CIÊNCIAS E TECNOLOGIA UNIDADE ACADÊMICA DE ENGENHARIA QUÍMICA DEBORAH ALMEIDA DOS ANJOS
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE CIÊNCIAS E TECNOLOGIA UNIDADE ACADÊMICA DE ENGENHARIA QUÍMICA DEBORAH ALMEIDA DOS ANJOS PROJETO DE MALHAS DE CONTROLE UTILIZANDO AS TÉCNICAS SVD E RGA CAMPINA
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE CIÊNCIAS E TECNOLOGIA UNIDADE ACADÊMICA DE ENGENHARIA QUÍMICA DEBORAH ALMEIDA DOS ANJOS PROJETO DE MALHAS DE CONTROLE UTILIZANDO AS TÉCNICAS SVD E RGA CAMPINA
Aula 6: Controladores PI
 Aula 6: Controladores PI prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 31 de agosto de 2017. prof. Dr. Eduardo Bento Pereira (UFSJ) Controle II 31 de agosto
Aula 6: Controladores PI prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 31 de agosto de 2017. prof. Dr. Eduardo Bento Pereira (UFSJ) Controle II 31 de agosto
Controle utilizando variáveis de estado - v1.1
 2 ontrole utilizando variáveis de estado - v. 2. Objetivo O objetivo desta experiência é, utilizando o enfoque de espaço de estados, projetar e implementar um controlador digital para uma planta simples
2 ontrole utilizando variáveis de estado - v. 2. Objetivo O objetivo desta experiência é, utilizando o enfoque de espaço de estados, projetar e implementar um controlador digital para uma planta simples
Projeto de um Controlador PID
 ALUNOS 1 - NOTA 2- DATA Projeto de um Controlador PID 1.1 Objetivo Este experimento tem como objetivo a implementação de um controlador PID para um dos processos da MPS-PA Estação Compacta. Supõe-se que
ALUNOS 1 - NOTA 2- DATA Projeto de um Controlador PID 1.1 Objetivo Este experimento tem como objetivo a implementação de um controlador PID para um dos processos da MPS-PA Estação Compacta. Supõe-se que
5 Controle e Simulação
 5 Controle e Simulação Neste capítulo serão apresentadas as simulações do sistema, tanto para o controle PID quanto para o controle por aprendizado. Todos os programas de simulação foram desenvolvidos
5 Controle e Simulação Neste capítulo serão apresentadas as simulações do sistema, tanto para o controle PID quanto para o controle por aprendizado. Todos os programas de simulação foram desenvolvidos
GERENCIAMENTO DE MALHAS Introdução
 Introdução Nos últimos anos a tecnologia de controle digital tem evoluído rapidamente no mundo. Os fabricantes de sistemas oferecem soluções de hardware e software com maior capacidade e menor custo. Apesar
Introdução Nos últimos anos a tecnologia de controle digital tem evoluído rapidamente no mundo. Os fabricantes de sistemas oferecem soluções de hardware e software com maior capacidade e menor custo. Apesar
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS
 SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
Variáveis de Estado e Equações de Estado Desenvolvimento de Modelos Matemáticos
 Variáveis de Estado e Equações de Estado Desenvolvimento de Modelos Matemáticos Modelos Matemáticos (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 1 / 40 Roteiro 1 Variáveis de Estado e Equações
Variáveis de Estado e Equações de Estado Desenvolvimento de Modelos Matemáticos Modelos Matemáticos (CP1) www.professores.deq.ufscar.br/ronaldo/cp1 DEQ/UFSCar 1 / 40 Roteiro 1 Variáveis de Estado e Equações
Controle de Processos Aula: Sistemas dinâmicos de ordem superior
 107484 Controle de Processos Aula: Sistemas dinâmicos de ordem superior Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre 2017 E. S. Tognetti
107484 Controle de Processos Aula: Sistemas dinâmicos de ordem superior Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre 2017 E. S. Tognetti
Redução de Múltiplos Subsistemas. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Redução de Múltiplos Subsistemas Carlos Alexandre Mello 1 Introdução Sistemas mais complexos são compostos por diversos subsistemas Queremos representar múltiplos subsistemas com apenas uma função de transferência
Redução de Múltiplos Subsistemas Carlos Alexandre Mello 1 Introdução Sistemas mais complexos são compostos por diversos subsistemas Queremos representar múltiplos subsistemas com apenas uma função de transferência
5- Comportamento dinâmico de processos com controle feedback
 5- Comportamento dinâmico de processos com controle feedback 5.1-Diagrama de blocos e a resposta em malha fechada Considere o sistema em malha fechada mostrado na Figura 4.1 b. Para cada um dos seus quatro
5- Comportamento dinâmico de processos com controle feedback 5.1-Diagrama de blocos e a resposta em malha fechada Considere o sistema em malha fechada mostrado na Figura 4.1 b. Para cada um dos seus quatro
Normas de Instrumentação Industrial: Simbologia e Identificação
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Normas de Instrumentação Industrial: Simbologia e Identificação Heitor Medeiros Florencio Objetivos da aula
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Normas de Instrumentação Industrial: Simbologia e Identificação Heitor Medeiros Florencio Objetivos da aula
SC1 Sistemas de Controle 1. Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
Os processos industriais são operados em condições dinâmicas... resultantes de constantes perturbações no sistema
 1 Malhas de Controle Prof a Ninoska Bojorge Departamento de Engenharia Química e de Petróleo UFF Controle de Processos 2 Os processos industriais são operados em condições dinâmicas... resultantes de constantes
1 Malhas de Controle Prof a Ninoska Bojorge Departamento de Engenharia Química e de Petróleo UFF Controle de Processos 2 Os processos industriais são operados em condições dinâmicas... resultantes de constantes
Avaliação Intermediária AI
 Avaliação Intermediária AI Nota: NOME DO ALUNO: MATRIC.: TURMA: DISCIPLINA: SISTEMAS DE CONTROLE E MODELAGEM DATA: / / PROFESSOR: WAGNER SANTOS C. DE JESUS CURSO: ADS Instruções de prova: Identifique corretamente
Avaliação Intermediária AI Nota: NOME DO ALUNO: MATRIC.: TURMA: DISCIPLINA: SISTEMAS DE CONTROLE E MODELAGEM DATA: / / PROFESSOR: WAGNER SANTOS C. DE JESUS CURSO: ADS Instruções de prova: Identifique corretamente
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA*
 ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA. Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
4 SISTEMA DE CONTROLE PREDITIVO PARA A COLUNA DE DESTILAÇÃO
 50 4 SISTEMA DE CONTROLE PREDITIVO PARA A COLUNA DE DESTILAÇÃO 4.1 CONTROLADOR PREDITIVO BASEADO EM MODELO O controle preditivo baseado em modelo apresentado em GARCIA et al. (1989) e também em CAMACHO
50 4 SISTEMA DE CONTROLE PREDITIVO PARA A COLUNA DE DESTILAÇÃO 4.1 CONTROLADOR PREDITIVO BASEADO EM MODELO O controle preditivo baseado em modelo apresentado em GARCIA et al. (1989) e também em CAMACHO
PID e Lugar das Raízes
 PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
Aula 7: Sintonia de controladores PID
 Aula 7: Sintonia de controladores PID prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 5 de setembro de 2017. prof. Dr. Eduardo Bento Pereira (UFSJ) Controle
Aula 7: Sintonia de controladores PID prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei ebento@ufsj.edu.br 5 de setembro de 2017. prof. Dr. Eduardo Bento Pereira (UFSJ) Controle
AULA #11. Comportamento de Sistemas de Controle
 UL #11 Comportamento de Sistemas de Controle por Realimentação Comportamento de Sistemas de Controle por Realimentação O comportamento estacionário e dinâmico da resposta de um sistema de controle por
UL #11 Comportamento de Sistemas de Controle por Realimentação Comportamento de Sistemas de Controle por Realimentação O comportamento estacionário e dinâmico da resposta de um sistema de controle por
ANÁLISE DE CONTROLADORES EM MALHA ABERTA E FECHADA PARA UMA COLUNA PILOTO DE DESTILAÇÃO
 ANÁLISE DE CONTROLADORES EM MALHA ABERTA E FECHADA PARA UMA COLUNA PILOTO DE DESTILAÇÃO C. V. de ARAÚJO 1, R. M. L. OLIVEIRA 1, R. P. BRITO 2 1 Universidade Federal de Campina Grande, Faculdade de Engenharia
ANÁLISE DE CONTROLADORES EM MALHA ABERTA E FECHADA PARA UMA COLUNA PILOTO DE DESTILAÇÃO C. V. de ARAÚJO 1, R. M. L. OLIVEIRA 1, R. P. BRITO 2 1 Universidade Federal de Campina Grande, Faculdade de Engenharia
IDENTIFICAÇÃO DE PROCESSOS EM TEMPO REAL VIA MODELO ARMAX
 IDENTIFICAÇÃO DE PROCESSOS EM TEMPO REAL VIA MODELO ARMAX C. B. CAVALCANTI 1, J. N. SILVA 1 1 Universidade Federal de Campina Grande, Departamento de Engenharia Química E-mail para contato: nilton.silva@ufcg.edu.br
IDENTIFICAÇÃO DE PROCESSOS EM TEMPO REAL VIA MODELO ARMAX C. B. CAVALCANTI 1, J. N. SILVA 1 1 Universidade Federal de Campina Grande, Departamento de Engenharia Química E-mail para contato: nilton.silva@ufcg.edu.br
Lista de Exercícios Controle de Processos 2
 Lista de xercícios Controle de Processos 2 Ronaldo DQ/UFSCar 1) Alguns sistemas de controle multimalhas são apresentados a seguir Para cada um deles, explique se o mesmo está correto e funcionará; isto
Lista de xercícios Controle de Processos 2 Ronaldo DQ/UFSCar 1) Alguns sistemas de controle multimalhas são apresentados a seguir Para cada um deles, explique se o mesmo está correto e funcionará; isto
Controle de Processos Aula: Introdução ao controle de processos
 107484 Controle de Processos Aula: Introdução ao controle de processos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2015 E. S. Tognetti
107484 Controle de Processos Aula: Introdução ao controle de processos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2015 E. S. Tognetti
Elementos Finais de Controle Válvulas de Controle
 Aula TCA: Controle de Processos Elementos Finais de Controle Válvulas de Controle Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília - UnB 10 de janeiro de 2013 Eduardo
Aula TCA: Controle de Processos Elementos Finais de Controle Válvulas de Controle Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília - UnB 10 de janeiro de 2013 Eduardo
Símbolos e Identificação
 Símbolos e Identificação 1. Introdução A simbologia de instrumentação analógica e digital, compartilhada e integral, distribuída e centralizada se baseia nas seguintes normas americanas (geralmente traduzidas
Símbolos e Identificação 1. Introdução A simbologia de instrumentação analógica e digital, compartilhada e integral, distribuída e centralizada se baseia nas seguintes normas americanas (geralmente traduzidas
Resolução da Lista 5. Questão 1:
 Resolução da Lista 5 Questão 1: a) A- Ação do Controlador: Quando o nível aumenta (em relação ao set-point), a válvula deve abrir, para re restabelecê-lo ao set-point. Para a válvula abrir, como ela é
Resolução da Lista 5 Questão 1: a) A- Ação do Controlador: Quando o nível aumenta (em relação ao set-point), a válvula deve abrir, para re restabelecê-lo ao set-point. Para a válvula abrir, como ela é
EFEITO DA PRESSÃO SOBRE DINÂMICA E CONTROLE DE COLUNA DE DESTILAÇÃO COM RETIRADA LATERAL
 EFEITO DA PRESSÃO SOBRE DINÂMICA E CONTROLE DE COLUNA DE DESTILAÇÃO COM RETIRADA LATERAL G. W. de FARIAS NETO, R. P. BRITO, S. R. DANTAS e R. M. L. OLIVEIRA Universidade Federal de Campina Grande, Departamento
EFEITO DA PRESSÃO SOBRE DINÂMICA E CONTROLE DE COLUNA DE DESTILAÇÃO COM RETIRADA LATERAL G. W. de FARIAS NETO, R. P. BRITO, S. R. DANTAS e R. M. L. OLIVEIRA Universidade Federal de Campina Grande, Departamento
CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID)
") CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID) AÇÕES DE CONTROLE O controlador PID é um controlador composto por três ações de controle Ação proporcional: u t = k e t Ação integral: u t = k 0 t
CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID) AÇÕES DE CONTROLE O controlador PID é um controlador composto por três ações de controle Ação proporcional: u t = k e t Ação integral: u t = k 0 t