Introdução à Análise do Movimento Humano
|
|
|
- Rachel Nobre de Lacerda
- 6 Há anos
- Visualizações:
Transcrição

1 Introdução à Análise do Movimento Humano

2 Tipos de Análise de Movimento
3 Análise Qualitativa
4 Análise Qualitativa do movimento Qualitativa (subjetiva) - Observação sistemática e julgameto introspectivo da qualidade do movimento humano (ex. bom, mau, regular) com o propósito de fornecer a intervenção mais apropriada para melhorar a performance. Ataque aos sintomas e depende da habilidade do observador em diagnosticar as causas dos problemas e é restrita apenas a certas variáveis do movimento (ex. forças, ativação muscular, coordenação).
5 Maiores pontos de observação da análise qualitativa da marcha 1 Cadencia 6 Pelve a. simétrica a. inclinação anterior or posterior b. rítmica b. variável c. em nível 2 Dor 7 Joelhos a. onde a. flexão, extensão b. quando b. estabilidade 3 Passo a. uniforme 8 Tornozelo a. dorsiflexão b. eversão / inversão 4 Ombros 9 Pés a. caídos b. elevados, deprimidos, protusos, retraídos a. contato com o calcanhar 5 Tronco 10 Base a. desvio fixo a. estável / variável b. balanço b. larga / estreita

6 Análise Quantitativa do Movimento

7 Análise Quantitativa do Movimento Quantitativa (objetiva) - Baseada em alguma medida de performance tal como x, v, a, φ, ω, α, F, M, T, P, etc...
8 Biomecânica Cinemática Cinética Controle Anatomia Linear Angular Linear Angular x, v, a θ α ϖ Força Torque Ativação Muscular Parâmetros corporais Cinemetria Dinamometria EMG Antropometria Modelo Forças de gravitação Energia Mecânica Inércia Modelo Momentos Liquidos e Forças internas (Adaptado de Baumann, 1995)

9


10
11 Fornecem importante informação para que compreendamos uma série de parâmetros que caracterizam/ determinam os movimentos

12 Análise Cinemática
13 Cinemática É a área de estudos da mecânica que analisa fatores de tempo e espaço do movimento de uma partícula ou de um sistema, sem se preocupar com as forças que o causaram.




14
15 Análise Cinemática Basada na descrição quantitativa de alguns parâmetros do movimento que definem: técnica performance Papel da biomecânica: Compreender a mecânica da tarefa (ex. variáveis importantes, relação entre variáveis e requerimentos da tarefa). Identicar causa de problemas na técnica ou performance Diferenciar fatores não relacionados
16 Planejando uma Análise Cinemática Quais as questões a serem respondidas? (o que eu quero da minha análise?) Quais as variáveis de interesse? (o que eu preciso medir?) Como analisar? (como eu vou medir?) Modelo de análise
17 Modelos em Biomecânica O que são modelos...? Uma tentativa de representar a realidade... de forma simplificada. Porque modelos...? ü Para estimar variáveis de interesse. ü Simplificações e premissas acerca de como os elementos são conectados e funcionam em conjunto (estrutura funcional) para obter os resultados desejados; mesmo com simplificações grosseiras: ü segmentos rígidos vs complexidade anatômica dos segmentos ü Aumentam o conhecimento e a visão sobre a realidade
18 Diagrama de representação ( figura palito ) Um diagrama de representação consiste em uma partícula ou um corpo rígido de interesse representado em um sistema de coordenadas. Para construir um diagrama de representação: a) O sistema de interesse deve ser descrito e esquematizado através de um sistema de segmentos articulados; b) Um sistema de coordenadas deve ser definido.


19 Sistema de ligações segmentares articuladas Quadril Joelho Tornozelo Metatarso Coxa Perna Pé

20 Exemplos de modelos biomecânicos C7 L2 L4 S2 T4 T7 T10 T12
21 Sistema de ligações segmentares articuladas Os segmentos corporais são dados pelos centros articulares, os quais são determinados pela intersecção das linhas que cruzam os centros articulares proximal e distal dos segmentos.
22 Fundamentos básicos para a análise cinemática
23 Quais as variáveis de interesse em cinemática?

24 Estática y x
25 Estática yt ym y xt xm x
26 yt ym Estática xt sen tanθ = = cos xm cateto _ oposto hipotenusa cateto _ adjacente hipotenusa senθ = senθ = cos θ = cosθ = = cateto _ oposto hipotenusa yt ym 2 ( yt ym) + ( xm xt cateto _ adjacente hipotenusa ( yt xm ym) 2 xt + ( xm cateto _ oposto cateto _ adjacente = ) xt) 2 2 yt ym xm xt
27 Estática y x
28 Estática y yj yt xt xj = = tanθ = sen cos cateto _ oposto cateto _ adjacente yj xj yt xt x
29 Estática y x



30 A fotografia A fotografia possibilita a análise de uma série de informações a respeito de um determinado instante do movimento (estático). A fotografia é um recurso bastante limitado para análises dinâmicas. Desta forma, a fotografia tem sido empregada para a análise de posições estática, quase estáticas (ex. postura) ou em atividades com início bem definido e marcado.


31 A fotografia: exemplo aplicado a análise da postura
32 Da fotografia para o filme De uma maneira geral, um filme é constituído por uma seqüência de fotografias exibidas com uma certa freqüência... Desta forma, se a posição de um ponto ou segmento for determinada em um quadro (frame 1), a diferença de posição em relação a um segundo quadro (frame 2) representa o deslocamento do ponto/segmento no espaço
 (x 1, y 1 ) y 3 x 1 x 3 Δx = x x 3")
33 y 1 Da fotografia para o filme! (x 3, y 3 ) (x 1, y 1 ) y 3 x 1 x 3 Δx = x x 3 1 Δy = y y 3 1
34 Da fotografia para o filme x inicial Δx = x x final inicial x final Na marcha, a diferença de posição horizontal do calcâneo (no instante do contato com o solo) representa a amplitude do passo... e é uma importante variável da marcha
35 Da fotografia para o filme Um outro fator importante é a velocidade com que certos fenômenos ocorrem... A velocidade pode ser obtida pela primeira derivada da posição do ponto ou segmento... v = distância tempo = Δ Δ x t = ( x ( t final final t x incial inicial Na fotografia é muito difícil determinar o intervalo de tempo entre as tomadas de imagem... porém o filme é formado por quadros (fotos!) obtidas em um intervalo de tempo constante - determinados pela frequência da câmera (50 a 60 Hz). ) )

36 Velocidade x inicial ( x ( t x final 0 m 1 m 0 s 1 s v = distância tempo = Δ Δ x t = final final t x incial inicial A velocidade das passadas determinam a velocidade de propulsão média do centro de massa. ) )
37 Cálculo de velocidade A velocidade calculada através de pontos extremos do movimento (ex. contatos sucessivos do calcâneo) revelam a velocidade média do movimento. A velocidade instantânea pode ser calculada da mesma forma, porém os pontos adjacentes devem ser utilizados v 2 v 3 v 4 Velocidades instantâneas Velocidade média v 5 v 6 v 7
38 Medidas lineares e angulares v A maior parte dos movimentos do corpo humano não são lineares, mas angulares... onde as mesmas relações se aplicam... angular = distância tempo angular = Δ Δ θ t = ( θ ( t final final θ t incial inicial ) )
 Vantagens: Baixo custo Medidas de fácil obtenção Desvantagens: Necessidade de material fotográfico e/ou impresso Pouca precisão (dependendo do tamanho da foto)")
39 Análise Cinemática A análise pode ser feita através de diversos métodos: Impressas - hard copy Fotografia ou conjunto de fotografias Determinação direta (transferidor) Determinação matemática trigonométrica (coord x;y) Vantagens: Baixo custo Medidas de fácil obtenção Desvantagens: Necessidade de material fotográfico e/ou impresso Pouca precisão (dependendo do tamanho da foto) Processamento muito trabalhoso
40 Análise Cinemática Digital - Via software genérico (ex. CorelDraw, etc...) Determinação matemática trigonométrica (coord x;y) Determinação digital direta (ferramentas lineares e angulares). Vantagens: Baixo custo Desvantagens: Necessidade da montagem de planilhas de cálculo Processamento relativamente trabalhoso
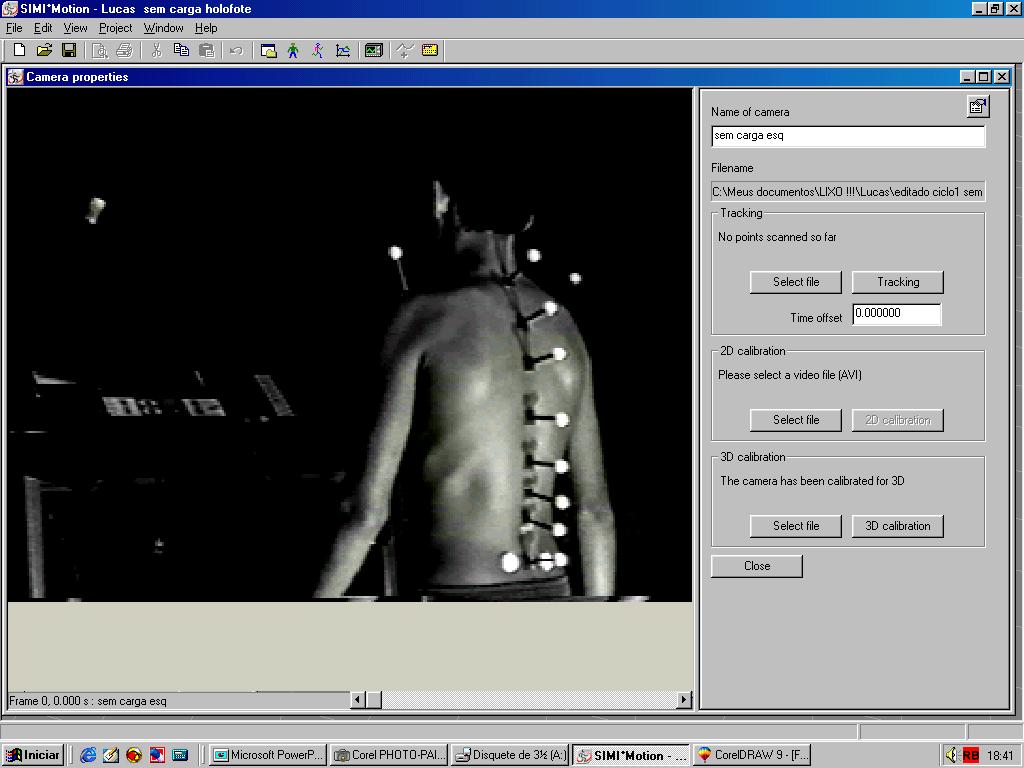
41 Análise Cinemática Digital - Via software específico (ex. Peak; Simi, Elite, APAS, etc...) Determinação manual Determinação semi-automática Determinação automática Vantagens: Processamento fácil Recursos visuais (gráficos) disponíveis Desvantagens: Alto custo


42 Determinação matemática trigonométrica (coordenadas x;y) The image cannot be displayed. Your computer may not have enough memory to open the image, or the image may have been corrupted. Restart your computer, and then open the file again. If the red x still appears, you may have to delete the image and then insert it again.

43 Determinação digital direta (ferramentas lineares eangulares) The image cannot be displayed. Your computer may not have enough memory to open the image, or the image may have been corrupted. Restart your computer, and then open the file again. If the red x still appears, you may have to delete the image and then insert it again.


44 Análise Cinemática Quantitativa da Marcha
45 Análise Cinemática da Marcha A análise cinemática pode ser efetuada em duas (2D) ou três dimensões (3D). A cinemática 2D é constituída por análises nos planos cartesianos (x, y; x, z; ou y, z) e apresentam uma série de requisitos, apesar de serem relativamente mais simples esistem limitações em relação a movimentos rotacionais (em outros planos) que não podem ser detectados. A cinemática 3D é constituída por análises efetuadas nos três planos de movimento (x, y e z) e possuem uma demanda (ex. equipamentos) maior do que a análise em 2D; possibilita a análise de movimentos rotacionais dos segmentos.
46 Eixos de referência para os planos de análise X Y plano transverso Z



47 Representação esquemática de uma análise cinemática tridimensional por computador Data analysis

48 Recursos técnicos fundamentais para 2 câmeras analógicas cabo de vídeo coleta de dados conversor analógico/digital


49 Marcadores planos ou esféricos (extrusão dos pontos)

50 câmeras holofotes 1000W sinal de sincronização câmera de sincronia de ciclos
51 câmera 1 câmera 2 sinal de sincronização câmeras sincronizadas

52 Análise Cinemática da Marcha - 3D

53 Análise Cinemática da Marcha - 3D (mínimo 2 câmeras)


54 Análise Cinemática da Marcha - 2D (calibragem) Para que o movimento possa ser analisado de forma correta, se faz necessário fornecer parâmetros que corrijam a relação câmera-objeto, ou seja, é necessário calibragem.


55 Análise Cinemática da Marcha 2D (1 câmera)
56 Análise cinemática da Marcha: Um exemplo aplicado

57

58 Calibragem do espaço tridimensional do movimento
59
60 acrômios C7 T4 T7 T10 T12 L2 L4 S2 espinhas ilíacas pósterosuperiores
61 y atan α = cateto oposto cateto adjacente α Cateto adjacente Cateto oposto x

62 ângulo relativo à cifose torácica
63 ângulo relativo à lordose lombar
64 antes do rastreamento
65 depois do rastreamento

66
67 Representação tridimensional estática dos segmentos
68 Representação tridimensional dinâmica dos segmentos plano sagital plano frontal

69 Comportamento do segmento C7-S2 durante a marcha sem mochila

70 Exemplo de uma análise cinemática dos picos de velocidades angulares do ombro e cotovelo

71 Exemplo de planilha de dados exportados no Excel
72 Outros métodos de análise cinemática Goniômetros: amplitude de movimento Eletrogoniômetros: ângulo articular em instantes sucessivos Passarelas condutivas: amplitude da passada, cadência, velocidade, etc. Cameras de vídeo: comprimento da passada, cadência, velocidade, etc. Acelerômetros: acelerações. Sistemas de marcas 3D: todas as medidas cinemáticas Campos eletromagnéticos: todas as medidas cinemáticas GPS: algumas medidas cinemáticas
Análise Cinemática. Prof. Dr. André L. F. Rodacki
 Análise Cinemática Prof. Dr. André L. F. Rodacki Cinemática A cinemática se preocupa com grandezas físicas que descrevem matematicamente as características do movimento de uma partícula/segmento, tais
Análise Cinemática Prof. Dr. André L. F. Rodacki Cinemática A cinemática se preocupa com grandezas físicas que descrevem matematicamente as características do movimento de uma partícula/segmento, tais
Biomecânica. É a ciência que se ocupa do estudo das leis físicas sobre o corpo humano (Amadio, 2000)
") Biomecânica Biomecânica é a ciência que examina as forças que agem sobre e dentro de estruturas biológicas e os efeitos produzidos por estas forças (Nigg, 1997). A biomecânica examina o corpo humano e
Biomecânica Biomecânica é a ciência que examina as forças que agem sobre e dentro de estruturas biológicas e os efeitos produzidos por estas forças (Nigg, 1997). A biomecânica examina o corpo humano e
Estudo dos momentos e forças articulares. Problema da dinâmica inversa. Ana de David Universidade de Brasília
 Estudo dos momentos e forças articulares Problema da dinâmica inversa Ana de David Universidade de Brasília Estudo dos momentos e forças articulares Momentos atuam para produzir acelerações lineares enquanto
Estudo dos momentos e forças articulares Problema da dinâmica inversa Ana de David Universidade de Brasília Estudo dos momentos e forças articulares Momentos atuam para produzir acelerações lineares enquanto
Métodos de Medição em Biomecânica
 Métodos de Medição em Biomecânica Ricardo Martins de Souza 2013 Áreas de Concentração da Biomecânica 1 Cinemática Estudo da Descrição do Movimento; Área de estudo (Cinemetria); Estudo das formas do movimento;
Métodos de Medição em Biomecânica Ricardo Martins de Souza 2013 Áreas de Concentração da Biomecânica 1 Cinemática Estudo da Descrição do Movimento; Área de estudo (Cinemetria); Estudo das formas do movimento;
Áreas de atuação da Biomecânica. Métodos de análise : quantitativo e qualitativo
 Aula 3: cinemática Relembrando... Áreas de atuação da Biomecânica Métodos de análise : quantitativo e qualitativo Modelos Biomecânicos Aula 3: cinemática Cinemática Análise 2D/ 3D Vetor Operações vetoriais
Aula 3: cinemática Relembrando... Áreas de atuação da Biomecânica Métodos de análise : quantitativo e qualitativo Modelos Biomecânicos Aula 3: cinemática Cinemática Análise 2D/ 3D Vetor Operações vetoriais
1. Tipos de análise do movimento humano. 2. Biomecânica - Definições. 3. Biomecânica - Áreas. 4. Terminologia - Planos e Eixos
 Sumário BIOMECÂNICA Ft. Ms. Sandra Aliberti 1. Tipos de análise do movimento humano 2. Biomecânica - Definições 3. Biomecânica - Áreas 4. Terminologia - Planos e Eixos 5. Biomecânica da marcha: funções
Sumário BIOMECÂNICA Ft. Ms. Sandra Aliberti 1. Tipos de análise do movimento humano 2. Biomecânica - Definições 3. Biomecânica - Áreas 4. Terminologia - Planos e Eixos 5. Biomecânica da marcha: funções
Cinemática do Movimento
 Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) Cinemática do Movimento Comparativo experimento Lab 2 e artigo - Cesqui et al. - Catching a Ball at the Right Time and
Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) Cinemática do Movimento Comparativo experimento Lab 2 e artigo - Cesqui et al. - Catching a Ball at the Right Time and
Sumário. BIOMECÂNICA Especialização O Aparelho locomotor no esporte UNIFESP (2004) TIPOS DE ANÁLISE DO MOVIMENTO
 TIPOS DE ANÁLISE DO MOVIMENTO") Licenciatura em Educação Física EEFEUSP (1991) Fisioterapia UNICID (1997) BIOMECÂNICA Especialização O Aparelho locomotor no esporte UNIFESP (2004) Ft. Ms. Sandra Aliberti Mestrado em Ciências da Reabilitação
Licenciatura em Educação Física EEFEUSP (1991) Fisioterapia UNICID (1997) BIOMECÂNICA Especialização O Aparelho locomotor no esporte UNIFESP (2004) Ft. Ms. Sandra Aliberti Mestrado em Ciências da Reabilitação
Teorema do Limite Central
 O Teorema do limite central (TLC) demonstra a tendência de aproximação das variáveis aleatórias com a distribuição normal. 2 O teorema do limite central é básico para a maioria das aplicações do controle
O Teorema do limite central (TLC) demonstra a tendência de aproximação das variáveis aleatórias com a distribuição normal. 2 O teorema do limite central é básico para a maioria das aplicações do controle
AVALIAÇÃO POSTURAL O QUE É UMA AVALIAÇÃO POSTURAL? 16/09/2014
 AVALIAÇÃO POSTURAL O QUE É UMA AVALIAÇÃO POSTURAL? A AVALIAÇÃO POSTURAL CONSISTE EM DETERMINAR E REGISTRAR SE POSSÍVEL ATRAVÉS DE FOTOS, OS DESVIOS OU ATITUDES POSTURAIS DOS INDIVÍDUOS, ONDE O MESMO É
AVALIAÇÃO POSTURAL O QUE É UMA AVALIAÇÃO POSTURAL? A AVALIAÇÃO POSTURAL CONSISTE EM DETERMINAR E REGISTRAR SE POSSÍVEL ATRAVÉS DE FOTOS, OS DESVIOS OU ATITUDES POSTURAIS DOS INDIVÍDUOS, ONDE O MESMO É
Refere-se a um conjunto de problemas encontrados no desenvolvimento de software:
 Crise de software Refere-se a um conjunto de problemas encontrados no desenvolvimento de software: (problemas não se limitam a softwares que não funcionam adequadamente) 1- As estimativas de prazo e de
Crise de software Refere-se a um conjunto de problemas encontrados no desenvolvimento de software: (problemas não se limitam a softwares que não funcionam adequadamente) 1- As estimativas de prazo e de
TRANSFORMAÇÕES EM SISTEMAS CARTESIANOS
 TRANSFORMAÇÕES EM SISTEMAS CARTESIANOS Parte II Transformações nos Espaços Bidimensionais GA116 Sistemas de Referência e Tempo Profª. Érica S. Matos Departamento de Geomática Setor de Ciências da Terra
TRANSFORMAÇÕES EM SISTEMAS CARTESIANOS Parte II Transformações nos Espaços Bidimensionais GA116 Sistemas de Referência e Tempo Profª. Érica S. Matos Departamento de Geomática Setor de Ciências da Terra
Biomecânica do Movimento Humano: Graus de Liberdade, Potência articular e Modelamento Biomecânico. Prof. Dr. Guanis de Barros Vilela Junior
 Biomecânica do Movimento Humano: Graus de Liberdade, Potência articular e Modelamento Biomecânico Prof. Dr. Guanis de Barros Vilela Junior Conceitos Básicos Modelo simplificado da articulação do cotovelo
Biomecânica do Movimento Humano: Graus de Liberdade, Potência articular e Modelamento Biomecânico Prof. Dr. Guanis de Barros Vilela Junior Conceitos Básicos Modelo simplificado da articulação do cotovelo
Cinesiologia aplicada a EF e Esporte. Prof. Dr. Matheus Gomes
 Cinesiologia aplicada a EF e Esporte Prof. Dr. Matheus Gomes 1 Cinesiologia PARTE I Descrição dos movimentos e ações musculares 2 Planos e Eixos Plano Frontal ou Coronal (eixo sagital ou ânteroposterior)
Cinesiologia aplicada a EF e Esporte Prof. Dr. Matheus Gomes 1 Cinesiologia PARTE I Descrição dos movimentos e ações musculares 2 Planos e Eixos Plano Frontal ou Coronal (eixo sagital ou ânteroposterior)
Perfil. 60% Solteiro 20% Casado 10% Outros. 70% Prancha 70% Viagens 30% Roupas de Neoprene. 75% Superior 25% Médio. 65% 1 Vez 35% 2 Vezes ou mais
 MÍDIA KIT 2017 Hardcore A HARDCORE é a fonte de informação do surfista atual. Com um time sólido de colunistas, jornalistas e colaboradores brasileiros e internacionais, traz mensalmente as melhores entrevistas,
MÍDIA KIT 2017 Hardcore A HARDCORE é a fonte de informação do surfista atual. Com um time sólido de colunistas, jornalistas e colaboradores brasileiros e internacionais, traz mensalmente as melhores entrevistas,
CINEMÁTICA DO MOVIMENTO HUMANO
 Formas Elementares de : O movimento humano énormalmente descrito como sendo um movimento genérico, i.e., uma combinação complexa de movimentos de translação e de movimentos de rotação. Translação (Rectilínea)
Formas Elementares de : O movimento humano énormalmente descrito como sendo um movimento genérico, i.e., uma combinação complexa de movimentos de translação e de movimentos de rotação. Translação (Rectilínea)
Análise comparativa dos sistemas de gerenciamento de águas subterrâneas do Brasil e dos Estados Unidos
 Análise comparativa dos sistemas de gerenciamento de águas subterrâneas do Brasil e dos Estados Unidos Josiane Lourencetti Amanda Fuzaro Zambone Bruno Matos Miller Orientador: Prof. Dr. Jefferson Nascimento
Análise comparativa dos sistemas de gerenciamento de águas subterrâneas do Brasil e dos Estados Unidos Josiane Lourencetti Amanda Fuzaro Zambone Bruno Matos Miller Orientador: Prof. Dr. Jefferson Nascimento
Câmara Virtual Simples
 Câmara Virtual Simples Edward Angel, Cap. 5 Instituto Superior Técnico Computação Gráfica 29/2 Na última aula... Pipeline de Visualiação 3D Câmara Virtual 2, CG&M/IST e Figuras Addison Wesley Sumário Câmara
Câmara Virtual Simples Edward Angel, Cap. 5 Instituto Superior Técnico Computação Gráfica 29/2 Na última aula... Pipeline de Visualiação 3D Câmara Virtual 2, CG&M/IST e Figuras Addison Wesley Sumário Câmara
A - Análise de Imagem e Digitalização
 A - Análise de Imagem e Digitalização Determinação experimental de coordenadas de pontos anatómicos. Determinação de planos de filmagem, escalas, sistemas de referência e modelos gráficos. a) Elabore um
A - Análise de Imagem e Digitalização Determinação experimental de coordenadas de pontos anatómicos. Determinação de planos de filmagem, escalas, sistemas de referência e modelos gráficos. a) Elabore um
Oi, Ficou curioso? Então conheça nosso universo.
 Oi, Somos do curso de Fisioterapia da Universidade Franciscana, e esse ebook é um produto exclusivo criado pra você. Nele, você pode ter um gostinho de como é uma das primeiras aulas do seu futuro curso.
Oi, Somos do curso de Fisioterapia da Universidade Franciscana, e esse ebook é um produto exclusivo criado pra você. Nele, você pode ter um gostinho de como é uma das primeiras aulas do seu futuro curso.
Mo#vação. Objec#vo. Estudar uma abordagem de desenvolvimento de so9ware orientada pelos objectos. Linguagens usadas: UML (Unified Modeling Language)
") Mo#vação Esta disciplina mostra como construir um bom alicerce para desenvolver so9ware orientado pelos objectos Ensina técnicas de análise e desenho para ajudar a produzir so9ware orientado pelos objectos
Mo#vação Esta disciplina mostra como construir um bom alicerce para desenvolver so9ware orientado pelos objectos Ensina técnicas de análise e desenho para ajudar a produzir so9ware orientado pelos objectos
Marcha Normal. José Eduardo Pompeu
 Marcha Normal José Eduardo Pompeu Marcha Humana Deslocamento de um local para outro Percorrer curtas distâncias. Versatilidade funcional dos MMII para se acomodar a: degraus, mudanças de superfícies e
Marcha Normal José Eduardo Pompeu Marcha Humana Deslocamento de um local para outro Percorrer curtas distâncias. Versatilidade funcional dos MMII para se acomodar a: degraus, mudanças de superfícies e
MÉTODOS EM AVALIAÇÃO POSTURAL
 MÉTODOS EM AVALIAÇÃO POSTURAL ÍTENS PARA AVALIAÇÃO POSTURAL Radiografia (PADRÃO OURO) Fotografia(análise bidimensional); Simetógrafo Fio de prumo Marcadores de superfície Devemos observar o indivíduo globalmente
MÉTODOS EM AVALIAÇÃO POSTURAL ÍTENS PARA AVALIAÇÃO POSTURAL Radiografia (PADRÃO OURO) Fotografia(análise bidimensional); Simetógrafo Fio de prumo Marcadores de superfície Devemos observar o indivíduo globalmente
METODOLOGIA PARA AVALIAÇÃO DE ESTABILIDADE DE ESCAVAÇÕES EM MEIOS DESCONTÍNUOS, A PARTIR DE TESTEMUNHOS DE SONDAGEM SEMI-ORIENTADOS
 METODOLOGIA PARA AVALIAÇÃO DE ESTABILIDADE DE ESCAVAÇÕES EM MEIOS DESCONTÍNUOS, A PARTIR DE TESTEMUNHOS DE SONDAGEM SEMI-ORIENTADOS Lucas Torrent Figueiredo escavações subterrâneas: métodos numéricos (maciços
METODOLOGIA PARA AVALIAÇÃO DE ESTABILIDADE DE ESCAVAÇÕES EM MEIOS DESCONTÍNUOS, A PARTIR DE TESTEMUNHOS DE SONDAGEM SEMI-ORIENTADOS Lucas Torrent Figueiredo escavações subterrâneas: métodos numéricos (maciços
CADEIRA DE MECÂNICA E ONDAS 2º Semestre de 2011/2012. Problemas de cinemática, com resolução
 Licenciatura em Engenharia Informática e de Computadores CADEIRA DE MECÂNICA E ONDAS 2º Semestre de 2011/2012 Problemas de cinemática, com resolução Problema 1.2 A trajectória de um avião é observada a
Licenciatura em Engenharia Informática e de Computadores CADEIRA DE MECÂNICA E ONDAS 2º Semestre de 2011/2012 Problemas de cinemática, com resolução Problema 1.2 A trajectória de um avião é observada a
A FALHA NÃO É UMA OPÇÃO
 FLH NÃO É UM OPÇÃO Eng. José Wagner raidotti Junior raidotti Engenharia e Consultoria Ltda. iretor Técnico de Gestão de tivos Reflexão individual Na empresa que eu trabalho a falha é uma OPÇÃO? Sim ou
FLH NÃO É UM OPÇÃO Eng. José Wagner raidotti Junior raidotti Engenharia e Consultoria Ltda. iretor Técnico de Gestão de tivos Reflexão individual Na empresa que eu trabalho a falha é uma OPÇÃO? Sim ou
As Oscilações estão presentes no nosso dia a dia como o vento que balança uma linha de transmissão elétrica, as vibrações da membrana de um
 As Oscilações estão presentes no nosso dia a dia como o vento que balança uma linha de transmissão elétrica, as vibrações da membrana de um alto-falante, ou de um instrumento de percussão. Um terremoto
As Oscilações estão presentes no nosso dia a dia como o vento que balança uma linha de transmissão elétrica, as vibrações da membrana de um alto-falante, ou de um instrumento de percussão. Um terremoto
13/4/2011. Quantidade de movimento x Massa Quantidade de movimento x Velocidade. Colisão frontal: ônibus x carro
 FORÇA x BRAÇO DE MOMENTO (Unidade: N.m) Régua sobre a mesa Torque = F senθ.r = r sen θ. F = F.d Braço de momento (d) = menor distância ou distância perpendicular do eixo à força Carolina Peixinho carolina@peb.ufrj.br
FORÇA x BRAÇO DE MOMENTO (Unidade: N.m) Régua sobre a mesa Torque = F senθ.r = r sen θ. F = F.d Braço de momento (d) = menor distância ou distância perpendicular do eixo à força Carolina Peixinho carolina@peb.ufrj.br
Cinesiologia. Cinesio = movimento Logia = estudo. Cinesiologia = estudo do movimento
 Cinesiologia Cinesio = movimento Logia = estudo Cinesiologia = estudo do movimento Cinesiologia Movimento: mudança de local, posição ou postura com relação a algum ponto do ambiente. Estudo do movimento
Cinesiologia Cinesio = movimento Logia = estudo Cinesiologia = estudo do movimento Cinesiologia Movimento: mudança de local, posição ou postura com relação a algum ponto do ambiente. Estudo do movimento
4 RESULTADOS. Resultados 63
 Resultados 63 4 RESULTADOS Observou-se que o presente trabalho propõe-se fundamentalmente a desenvolver uma metodologia para a determinação de forças atuantes durante o movimento de flexão/extensão da
Resultados 63 4 RESULTADOS Observou-se que o presente trabalho propõe-se fundamentalmente a desenvolver uma metodologia para a determinação de forças atuantes durante o movimento de flexão/extensão da
Modelamento Biomecânico. Prof. Dr. Guanis de Barros Vilela Junior
 Modelamento Biomecânico Prof. Dr. Guanis de Barros Vilela Junior O que é um Modelo Biomecânico? O Modelamento Biomecânico se refere à construção de um objeto (real ou virtual) a partir de conhecimentos
Modelamento Biomecânico Prof. Dr. Guanis de Barros Vilela Junior O que é um Modelo Biomecânico? O Modelamento Biomecânico se refere à construção de um objeto (real ou virtual) a partir de conhecimentos
Deduza a Equação de Onda que representa uma onda progressiva unidimensional, numa corda de massa M e comprimento L.
 Deduza a Equação de Onda que representa uma onda progressiva unidimensional, numa corda de massa M e comprimento L. Esquema do problema Consideremos uma corda longa, fixa nas extremidades, por onde se
Deduza a Equação de Onda que representa uma onda progressiva unidimensional, numa corda de massa M e comprimento L. Esquema do problema Consideremos uma corda longa, fixa nas extremidades, por onde se
O corpo em repouso somente entra em movimento sob ação de forças Caminhada em bipedia = pêndulo alternado A força propulsiva na caminhada é a força
 O corpo em repouso somente entra em movimento sob ação de forças Caminhada em bipedia = pêndulo alternado A força propulsiva na caminhada é a força de reação exercida pelo piso sobre os pés. Um corpo em
O corpo em repouso somente entra em movimento sob ação de forças Caminhada em bipedia = pêndulo alternado A força propulsiva na caminhada é a força de reação exercida pelo piso sobre os pés. Um corpo em
Força. Aceleração (sai ou volta para o repouso) Força. Vetor. Aumenta ou diminui a velocidade; Muda de direção. Acelerar 1kg de massa a 1m/s 2 (N)
 Força. Vetor. Aumenta ou diminui a velocidade; Muda de direção. Acelerar 1kg de massa a 1m/s 2 (N)") Força Empurrão ou puxão; Força é algo que acelera ou deforma alguma coisa; A força exercida por um objeto sobre o outro é correspondida por outra igual em magnitude, mas no sentido oposto, que é exercida
Força Empurrão ou puxão; Força é algo que acelera ou deforma alguma coisa; A força exercida por um objeto sobre o outro é correspondida por outra igual em magnitude, mas no sentido oposto, que é exercida
CONTROLE QUÍMICO E MECÂNICO DO BIOFILME
 INAPÓS - Faculdade de Odontologia e Pós Graduação The image cannot be displayed. Your computer may not have enough memory to open the image, or the image may have been corrupted. Restart your computer,
INAPÓS - Faculdade de Odontologia e Pós Graduação The image cannot be displayed. Your computer may not have enough memory to open the image, or the image may have been corrupted. Restart your computer,
Apresentação Outras Coordenadas... 39
 Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Análise de Forças no Corpo Humano. = Cinética. = Análise do Salto Vertical (unidirecional) Exemplos de Forças - Membro inferior.
 Exemplos de Forças - Membro inferior.") Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) leia.bagesteiro@ufabc.edu.br 31/10/2012 Análise de Forças no Corpo Humano = Cinética = Análise do Salto Vertical (unidirecional)
Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) leia.bagesteiro@ufabc.edu.br 31/10/2012 Análise de Forças no Corpo Humano = Cinética = Análise do Salto Vertical (unidirecional)
Windows Server 2012. Licenciamento e Preço Todas as Edições
 The image cannot be displayed. Your computer may not have enough memory to open the image, or the image may have been corrupted. Restart your computer, and then open the file again. If the red x still
The image cannot be displayed. Your computer may not have enough memory to open the image, or the image may have been corrupted. Restart your computer, and then open the file again. If the red x still
Compartilhamento e coordenação de informações (INTERNo e EXTERN0) A CASE STUDY OF KENYA. Por: Joyce Marangu Awino
 A CASE STUDY OF KENYA. Por: Joyce Marangu Awino") Compartilhamento e coordenação de informações (INTERNo e EXTERN0) A CASE STUDY OF KENYA Por: Joyce Marangu Awino Resumo da apresentação Exemplo de Conhecimento do Domínio Marítimo Interno versus externo:
Compartilhamento e coordenação de informações (INTERNo e EXTERN0) A CASE STUDY OF KENYA Por: Joyce Marangu Awino Resumo da apresentação Exemplo de Conhecimento do Domínio Marítimo Interno versus externo:
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
P3 MECÂNICA NEWTONIANA A (FIS 1025) 18/11/2011
 18/11/2011") P3 MECÂNICA NEWTONIANA A (FIS 1025) 18/11/2011 Nome: Assinatura: Matrícula: Turma: Questão Valor Grau Revisão 1 a 3,0 2 a 3,0 3 a 2,5 Total 8,5 -As respostas sem justificativas ou cálculos não serão computadas.
P3 MECÂNICA NEWTONIANA A (FIS 1025) 18/11/2011 Nome: Assinatura: Matrícula: Turma: Questão Valor Grau Revisão 1 a 3,0 2 a 3,0 3 a 2,5 Total 8,5 -As respostas sem justificativas ou cálculos não serão computadas.
Fraturas da coluna cervical baixa
 Fraturas da coluna cervical baixa Herton Rodrigo Tavares Costa Fernando Herrero n INTRODUÇÃO As lesões da coluna cervical são cada vez mais frequentes, em decorrência do número crescente de acidentes de
Fraturas da coluna cervical baixa Herton Rodrigo Tavares Costa Fernando Herrero n INTRODUÇÃO As lesões da coluna cervical são cada vez mais frequentes, em decorrência do número crescente de acidentes de
21/Fev/2018 Aula 2. 19/Fev/2018 Aula 1
 19/Fev/018 Aula 1 1.1 Conceitos gerais 1.1.1 Introdução 1.1. Unidades 1.1.3 Dimensões 1.1.4 Estimativas 1.1.5 Resolução de problemas - método 1.1.6 Escalares e vetores 1. Descrição do movimento 1..1 Distância
19/Fev/018 Aula 1 1.1 Conceitos gerais 1.1.1 Introdução 1.1. Unidades 1.1.3 Dimensões 1.1.4 Estimativas 1.1.5 Resolução de problemas - método 1.1.6 Escalares e vetores 1. Descrição do movimento 1..1 Distância
3 Técnicas de medição do escoamento
 Técnicas de medição do escoamento 28 3 Técnicas de medição do escoamento O conhecimento do campo de velocidade de fluidos em movimento é fundamental para o entendimento dos mecanismos básicos que governam
Técnicas de medição do escoamento 28 3 Técnicas de medição do escoamento O conhecimento do campo de velocidade de fluidos em movimento é fundamental para o entendimento dos mecanismos básicos que governam
1) O vetor posição de uma partícula que se move no plano XZ e dado por: r = (2t 3 + t 2 )i + 3t 2 k
 O vetor posição de uma partícula que se move no plano XZ e dado por: r = (2t 3 + t 2 )i + 3t 2 k") 1) O vetor posição de uma partícula que se move no plano XZ e dado por: r = (2t + t 2 )i + t 2 k onde r é dado em metros e t em segundos. Determine: (a) (1,0) o vetor velocidade instantânea da partícula,
1) O vetor posição de uma partícula que se move no plano XZ e dado por: r = (2t + t 2 )i + t 2 k onde r é dado em metros e t em segundos. Determine: (a) (1,0) o vetor velocidade instantânea da partícula,
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
Aula do cap. 16 MHS e Oscilações
 Aula do cap. 16 MHS e Oscilações Movimento harmônico simples (MHS). Equações do MHS soluções, x(t), v(t) e a(t). Relações entre MHS e movimento circular uniforme. Considerações de energia mecânica no movimento
Aula do cap. 16 MHS e Oscilações Movimento harmônico simples (MHS). Equações do MHS soluções, x(t), v(t) e a(t). Relações entre MHS e movimento circular uniforme. Considerações de energia mecânica no movimento
Profº Carlos Alberto
 Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
DEFINIÇÃO. Forma de locomoção no qual o corpo ereto e em movimento é apoiado primeiro por uma das pernas e depois pela outra.
 ANÁLISE DA MARCHA DEFINIÇÃO Forma de locomoção no qual o corpo ereto e em movimento é apoiado primeiro por uma das pernas e depois pela outra. Constitui-se se de movimentos automatizados que variam de
ANÁLISE DA MARCHA DEFINIÇÃO Forma de locomoção no qual o corpo ereto e em movimento é apoiado primeiro por uma das pernas e depois pela outra. Constitui-se se de movimentos automatizados que variam de
Centro de Gravidade e Equilíbrio e Referenciais Antropométricos. Prof. Dr. André L.F. Rodacki
 Centro de Gravidade e Equilíbrio e Referenciais Antropométricos Prof. Dr. André L.F. Rodacki Centro de Gravidade Lehmkuhl & Smith (1989): único ponto de um corpo ao redor do qual todas as partículas de
Centro de Gravidade e Equilíbrio e Referenciais Antropométricos Prof. Dr. André L.F. Rodacki Centro de Gravidade Lehmkuhl & Smith (1989): único ponto de um corpo ao redor do qual todas as partículas de
4.1 INTRODUÇÃO Geodésia Celeste - Objetivo científico e operacional Métodos geométricos e dinâmicos
 4 MECÂNICA CELESTE E GEODÉSIA 4. INTRODUÇÃO 4.. Geodésia Celeste - Objetivo científico e operacional 4.. Métodos geométricos e dinâmicos 4. MOVIMENTO ORBITAL 4.. Forças centrais. O problema dos dois corpos
4 MECÂNICA CELESTE E GEODÉSIA 4. INTRODUÇÃO 4.. Geodésia Celeste - Objetivo científico e operacional 4.. Métodos geométricos e dinâmicos 4. MOVIMENTO ORBITAL 4.. Forças centrais. O problema dos dois corpos
MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA
 MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA 1.0 Definições Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É conveniente representar a posição da partícula com suas
MOVIMENTO ROTACIONAL E MOMENTO DE INÉRCIA 1.0 Definições Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É conveniente representar a posição da partícula com suas
Componente Química 11ºAno Professora Paula Melo Silva Unidade 1 Mecânica 1.1. Tempo, posição e velocidade
 Referencial e posição: coordenadas cartesianas em movimentos retilíneos Componente Química 11ºAno Professora Paula Melo Silva Unidade 1 Mecânica 1.1. Tempo, posição e velocidade Distância percorrida sobre
Referencial e posição: coordenadas cartesianas em movimentos retilíneos Componente Química 11ºAno Professora Paula Melo Silva Unidade 1 Mecânica 1.1. Tempo, posição e velocidade Distância percorrida sobre
Física 2 - Movimentos Oscilatórios. Em um ciclo da função seno ou cosseno, temos que são percorridos 2π rad em um período, ou seja, em T.
 Física 2 - Movimentos Oscilatórios Halliday Cap.15, Tipler Cap.14 Movimento Harmônico Simples O que caracteriza este movimento é a periodicidade do mesmo, ou seja, o fato de que de tempos em tempos o movimento
Física 2 - Movimentos Oscilatórios Halliday Cap.15, Tipler Cap.14 Movimento Harmônico Simples O que caracteriza este movimento é a periodicidade do mesmo, ou seja, o fato de que de tempos em tempos o movimento
*Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções em simplificaaulas.com.
 MECÂNICA 1 - RESUMO E EXERCÍCIOS* P2 *Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções em. CENTRO INSTANTÂNEO DE ROTAÇÃO (CIR) 1 o ) Escolher
MECÂNICA 1 - RESUMO E EXERCÍCIOS* P2 *Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções em. CENTRO INSTANTÂNEO DE ROTAÇÃO (CIR) 1 o ) Escolher
Movimento harmônico. Prof. Juliano G. Iossaqui. Londrina, 2017
 Vibrações Movimento harmônico Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui (UTFPR) Aula 02 Londrina, 2017 1
Vibrações Movimento harmônico Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano G. Iossaqui (UTFPR) Aula 02 Londrina, 2017 1
Movimento Circular. 1 Rotação. Aron Maciel
 Movimento Circular Aron Maciel 1 Rotação Já sabemos como as leis e definições da Física funcionam no movimento retilíneo, agora, vamos investigar situações em que temos objetos rotacionando em torno de
Movimento Circular Aron Maciel 1 Rotação Já sabemos como as leis e definições da Física funcionam no movimento retilíneo, agora, vamos investigar situações em que temos objetos rotacionando em torno de
Uma oscilação é um movimento repetitivo realizado por um corpo em torno de determinado ponto.
 Uma oscilação é um movimento repetitivo realizado por um corpo em torno de determinado ponto. Exemplos: pêndulos, ponte ao ser submetida à passagem de um veículo, asas de um avião ao sofrer turbulência
Uma oscilação é um movimento repetitivo realizado por um corpo em torno de determinado ponto. Exemplos: pêndulos, ponte ao ser submetida à passagem de um veículo, asas de um avião ao sofrer turbulência
1. Estudo do pêndulo
 Objectivos odelizar um pêndulo invertido rígido de comprimento e massa, supondo uma entrada de binário. Simular em computador. entar estabilizar o pêndulo em ciclo aberto por manipulação directa do binário.
Objectivos odelizar um pêndulo invertido rígido de comprimento e massa, supondo uma entrada de binário. Simular em computador. entar estabilizar o pêndulo em ciclo aberto por manipulação directa do binário.
MODELOS DE APOIO À DECISÃO. Carlos A. Bana e Costa
 MODELOS DE APOIO À DECISÃO Carlos A. Bana e Costa SISTEMA DE APOIO À DECISÃO PARA ESTABELECIMENTO DE PRIORIDADES DE INTERVENÇÃO EM IMÓVEIS CLASSIFICADOS DA DGP 1 PRINCIPAIS INTERLOCUTORES DGP EQUIPA TÉCNICA
MODELOS DE APOIO À DECISÃO Carlos A. Bana e Costa SISTEMA DE APOIO À DECISÃO PARA ESTABELECIMENTO DE PRIORIDADES DE INTERVENÇÃO EM IMÓVEIS CLASSIFICADOS DA DGP 1 PRINCIPAIS INTERLOCUTORES DGP EQUIPA TÉCNICA
SEM Controle de Sistemas Robóticos
 SEM5875 - Controle de Sistemas Robóticos Adriano A. G. Siqueira Aula 1 - Revisão de Cinemática, Dinâmica e Propriedades das Matrizes Dinâmicas SEM5875 - Controle de Sistemas Robóticos p. 1/61 Matrizes
SEM5875 - Controle de Sistemas Robóticos Adriano A. G. Siqueira Aula 1 - Revisão de Cinemática, Dinâmica e Propriedades das Matrizes Dinâmicas SEM5875 - Controle de Sistemas Robóticos p. 1/61 Matrizes
Capítulo 4 - Derivadas
 Capítulo 4 - Derivadas 1. Problemas Relacionados com Derivadas Problema I: Coeficiente Angular de Reta tangente. Problema II: Taxas de variação. Problema I) Coeficiente Angular de Reta tangente I.1) Inclinação
Capítulo 4 - Derivadas 1. Problemas Relacionados com Derivadas Problema I: Coeficiente Angular de Reta tangente. Problema II: Taxas de variação. Problema I) Coeficiente Angular de Reta tangente I.1) Inclinação
Translação e Rotação Energia cinética de rotação Momentum de Inércia Torque. Física Geral I ( ) - Capítulo 07. I. Paulino*
 - Capítulo 07. I. Paulino*") ROTAÇÃO Física Geral I (1108030) - Capítulo 07 I. Paulino* *UAF/CCT/UFCG - Brasil 2012.2 1 / 25 Translação e Rotação Sumário Definições, variáveis da rotação e notação vetorial Rotação com aceleração angular
ROTAÇÃO Física Geral I (1108030) - Capítulo 07 I. Paulino* *UAF/CCT/UFCG - Brasil 2012.2 1 / 25 Translação e Rotação Sumário Definições, variáveis da rotação e notação vetorial Rotação com aceleração angular
novembro de 2014 Fundação Perseu Abramo - Partido dos Trabalhadores DESEMPENHO ELEITORAL E CONDIÇÕES SOCIOECONÔMICAS DOS MUNICÍPIOS BRASILEIROS
 16 novembro de 2014 Fundação Perseu Abramo - Partido dos Trabalhadores DESEMPENHO ELEITORAL E CONDIÇÕES SOCIOECONÔMICAS DOS MUNICÍPIOS BRASILEIROS Expediente Esta é uma publicação da Fundação Perseu Abramo.
16 novembro de 2014 Fundação Perseu Abramo - Partido dos Trabalhadores DESEMPENHO ELEITORAL E CONDIÇÕES SOCIOECONÔMICAS DOS MUNICÍPIOS BRASILEIROS Expediente Esta é uma publicação da Fundação Perseu Abramo.
Análise do movimento Parafuso
 Análise do movimento Parafuso 1 Projeto de Pesquisa Trançados musculares saúde corporal e o ensino do frevo Análise do movimento Observador: Giorrdani Gorki Queiroz de Souza (Kiran) Orientação para realização
Análise do movimento Parafuso 1 Projeto de Pesquisa Trançados musculares saúde corporal e o ensino do frevo Análise do movimento Observador: Giorrdani Gorki Queiroz de Souza (Kiran) Orientação para realização
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo
 Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
USO DE IMAGENS ASTRONÔMICAS NO ENSINO DE CIÊNCIAS
 USO DE IMAGENS ASTRONÔMICAS NO ENSINO DE CIÊNCIAS Dr. André Milone e equipe do Miniobservatório (Divisão de Astrofísica, CEA/INPE) miniobservatorio@das.inpe.br Curso de Introdução à Astronomia e Astrofísica
USO DE IMAGENS ASTRONÔMICAS NO ENSINO DE CIÊNCIAS Dr. André Milone e equipe do Miniobservatório (Divisão de Astrofísica, CEA/INPE) miniobservatorio@das.inpe.br Curso de Introdução à Astronomia e Astrofísica
ASPECTOS BIOMECÂNICOS APLICADOS AO TREINAMENTO DE FORÇA. Professor Marcio Gomes
 ASPECTOS BIOMECÂNICOS APLICADOS AO TREINAMENTO DE FORÇA ANATOMIA HUMANA O conhecimento da Anatomia é de fundamental importância na hora de prescrever o exercício... Ossos e músculos; Tipos de articulações;
ASPECTOS BIOMECÂNICOS APLICADOS AO TREINAMENTO DE FORÇA ANATOMIA HUMANA O conhecimento da Anatomia é de fundamental importância na hora de prescrever o exercício... Ossos e músculos; Tipos de articulações;
FEP Física Geral e Experimental para Engenharia I
 FEP2195 - Física Geral e Experimental para Engenharia I Prova Substitutiva - Gabarito 1. Dois blocos de massas 4, 00 kg e 8, 00 kg estão ligados por um fio e deslizam para baixo de um plano inclinado de
FEP2195 - Física Geral e Experimental para Engenharia I Prova Substitutiva - Gabarito 1. Dois blocos de massas 4, 00 kg e 8, 00 kg estão ligados por um fio e deslizam para baixo de um plano inclinado de
Universidade de Brasília Instituto de Geociências Observatório Sismológico
 Seismic source s parameters of Brazilian earthquakes detected by Seismological Observatory in the last six years and relation between its body waves and seismic moment magnitudes Lucas Barros, Juraci Mário,
Seismic source s parameters of Brazilian earthquakes detected by Seismological Observatory in the last six years and relation between its body waves and seismic moment magnitudes Lucas Barros, Juraci Mário,
Análise Clínica da Marcha Exemplo de Aplicação em Laboratório de Movimento
 Análise Clínica da Marcha Exemplo de Aplicação em Laboratório de Movimento Daniela Sofia S. Sousa João Manuel R. S. Tavares Miguel Velhote Correia Emília Mendes Sumário Introdução à análise clínica da
Análise Clínica da Marcha Exemplo de Aplicação em Laboratório de Movimento Daniela Sofia S. Sousa João Manuel R. S. Tavares Miguel Velhote Correia Emília Mendes Sumário Introdução à análise clínica da
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: As condições que
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: As condições que
Uma terra boa para viver trabalhar e investir
 Abrantes Uma terra boa para viver trabalhar e investir Abrantes NO CENTRO DAS GRANDES ACESSIBILIDADES Porto Km2-713.46 População 42.436 Abrantes Região - Lisboa e Vale do Tejo Lisboa NUT III - Médio Tejo
Abrantes Uma terra boa para viver trabalhar e investir Abrantes NO CENTRO DAS GRANDES ACESSIBILIDADES Porto Km2-713.46 População 42.436 Abrantes Região - Lisboa e Vale do Tejo Lisboa NUT III - Médio Tejo
MOVIMENTO OSCILATÓRIO
 MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
CONSCIENTIZAÇÃO DA NECESSIDADE DO PSA-GUANDU
 CEDAE - Companhia Estadual de Águas e Esgotos DG - Diretoria de Produção e Grande Operação CONSCIENTIZAÇÃO DA NECESSIDADE DO PSA-GUANDU 1 CEDAE - Companhia Estadual de Águas e Esgotos DG - Diretoria de
CEDAE - Companhia Estadual de Águas e Esgotos DG - Diretoria de Produção e Grande Operação CONSCIENTIZAÇÃO DA NECESSIDADE DO PSA-GUANDU 1 CEDAE - Companhia Estadual de Águas e Esgotos DG - Diretoria de
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Sétima Lista. MAT0216 Cálculo Diferencial e Integral III Prof. Daniel Victor Tausk 14/04/2019
 Sétima Lista MAT216 Cálculo iferencial e Integral III Prof. aniel Victor Tausk 14/4/219 Exercício 1. ados a, b, c >, determine o volume do elipsóide {(x, y, z) R 3 : x2 a 2 + y2 b 2 + z2 } c 2 1 de semi-eixos
Sétima Lista MAT216 Cálculo iferencial e Integral III Prof. aniel Victor Tausk 14/4/219 Exercício 1. ados a, b, c >, determine o volume do elipsóide {(x, y, z) R 3 : x2 a 2 + y2 b 2 + z2 } c 2 1 de semi-eixos
11 Cinemática de partículas 605
 SUMÁRIO 11 Cinemática de partículas 605 11.1 Introdução à dinâmica 606 Movimento retilíneo de partículas 607 11.2 Posição, velocidade e aceleração 607 11.3 Determinação do movimento de uma partícula 611
SUMÁRIO 11 Cinemática de partículas 605 11.1 Introdução à dinâmica 606 Movimento retilíneo de partículas 607 11.2 Posição, velocidade e aceleração 607 11.3 Determinação do movimento de uma partícula 611
Capítulo 10. Rotação. Copyright 2014 John Wiley & Sons, Inc. All rights reserved.
 Capítulo 10 Rotação Copyright 10-1 Variáveis Rotacionais Agora estudaremos o movimento de rotação Aplicam-se as mesmas leis Mas precisamos de novas variáveis para expressá-las o o Torque Inércia rotacional
Capítulo 10 Rotação Copyright 10-1 Variáveis Rotacionais Agora estudaremos o movimento de rotação Aplicam-se as mesmas leis Mas precisamos de novas variáveis para expressá-las o o Torque Inércia rotacional
Valoração econômica do lodo de esgoto gerado nas ETE s do Rio de Janeiro
 Valoração econômica do lodo de esgoto gerado nas ETE s do Rio de Janeiro Alan Henrique Marques de Abreu Engenheiro Florestal CEDAE Doutorando em Ciências Ambientais e Florestais PPGCAF / UFRRJ ETE Alegria.
Valoração econômica do lodo de esgoto gerado nas ETE s do Rio de Janeiro Alan Henrique Marques de Abreu Engenheiro Florestal CEDAE Doutorando em Ciências Ambientais e Florestais PPGCAF / UFRRJ ETE Alegria.
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO. Departamento de Engenharia Mecânica
 ESCA PITÉCNICA DA UNIVERSIDADE DE SÃ PAU Avenida Professor Mello Moraes, nº 31. cep 558-9, São Paulo, SP. Telefone: (xx11) 391 5337 Fax: (xx11) 3813 188 MECÂNICA II - PME 3 Primeira Prova de abril de 17
ESCA PITÉCNICA DA UNIVERSIDADE DE SÃ PAU Avenida Professor Mello Moraes, nº 31. cep 558-9, São Paulo, SP. Telefone: (xx11) 391 5337 Fax: (xx11) 3813 188 MECÂNICA II - PME 3 Primeira Prova de abril de 17
Física 1 Resumo e Exercícios*
 Física 1 Resumo e Exercícios* *Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções grátis em CINEMÁTICA Movimento Linear Movimento Angular Espaço
Física 1 Resumo e Exercícios* *Exercícios de provas anteriores escolhidos para você estar preparado para qualquer questão na prova. Resoluções grátis em CINEMÁTICA Movimento Linear Movimento Angular Espaço
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Conceitos Cinemáticos e Cinéticos
 Conceitos Cinemáticos e Cinéticos Ricardo Martins de Souza 2013 Definição de Cinemática Massa (m): quantidade de matéria que compões um corpo (kg). Inércia: resistência à ação ou à mudança (não é mensurada
Conceitos Cinemáticos e Cinéticos Ricardo Martins de Souza 2013 Definição de Cinemática Massa (m): quantidade de matéria que compões um corpo (kg). Inércia: resistência à ação ou à mudança (não é mensurada
: v 2 z = v 2 z0 2gz = v 2 0sen 2 θ 0 2gz. d = v 0 cosθ 0.t i) v0sen 2 2 θ 0 = 2g ii) v 0 senθ 0 =gt iii)
 v0sen 2 2 θ 0 = 2g ii) v 0 senθ 0 =gt iii)") Questão 1 a) valor = (2,0 pontos) Durante a trejetória do atleta no ar este sofre a ação apenas de uma única força, a força peso, que está orientada no sentido negativo do eixo Z e produz uma aceleração
Questão 1 a) valor = (2,0 pontos) Durante a trejetória do atleta no ar este sofre a ação apenas de uma única força, a força peso, que está orientada no sentido negativo do eixo Z e produz uma aceleração
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I INFORMAÇÕES GERAIS. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I INFORMAÇÕES GERAIS Prof. Bruno Farias Arquivo em anexo Conteúdo Programático Bibliografia
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I INFORMAÇÕES GERAIS Prof. Bruno Farias Arquivo em anexo Conteúdo Programático Bibliografia
Física 1. Resumo e Exercícios P1
 Física 1 Resumo e Exercícios P1 Fórmulas e Resumo Teórico Parte 1 Derivada de polinômios - Considerando um polinômio P x = ax %, temos: d P x = anx%() dx Integral de polinômios - Considerando um polinômio
Física 1 Resumo e Exercícios P1 Fórmulas e Resumo Teórico Parte 1 Derivada de polinômios - Considerando um polinômio P x = ax %, temos: d P x = anx%() dx Integral de polinômios - Considerando um polinômio
MODELAGEM DE MARCHA E SIMULAÇÃO DE DESGASTE EM PRÓTESE DE JOELHO
 MODELAGEM DE MARCHA E SIMULAÇÃO DE DESGASTE EM PRÓTESE DE JOELHO LOPES, Afonso Heitor Favaretto (Engenharia Mecânica/UNIBRASIL) FARIA, Alexandre Pereira de (Engenharia Mecânica / UNIBRASIL) SCHNEIDER,
MODELAGEM DE MARCHA E SIMULAÇÃO DE DESGASTE EM PRÓTESE DE JOELHO LOPES, Afonso Heitor Favaretto (Engenharia Mecânica/UNIBRASIL) FARIA, Alexandre Pereira de (Engenharia Mecânica / UNIBRASIL) SCHNEIDER,
AÇÕES EM EDUCAÇÃO AMBIENTAL. da Assessoria de Gestão Ambiental da CEDAE
 AÇÕES EM EDUCAÇÃO AMBIENTAL da Assessoria de Gestão Ambiental da CEDAE Educação Ambiental entende-se por educação ambiental os processos por meio dos quais o indivíduo e a coletividade constroem valores
AÇÕES EM EDUCAÇÃO AMBIENTAL da Assessoria de Gestão Ambiental da CEDAE Educação Ambiental entende-se por educação ambiental os processos por meio dos quais o indivíduo e a coletividade constroem valores
Biomecânica na Ginástica Artística Franklin de Camargo-Junior Mestre em Ciências
 LIGA DE FISIOTERAPIA ESPORTIVA Prof. Me. Franklin de Camargo Junior Biomecânica na Ginástica Artística Franklin de Camargo-Junior Mestre em Ciências São Caetano do Sul 2014 CONTEXTUALIZAÇÃO Premissas:
LIGA DE FISIOTERAPIA ESPORTIVA Prof. Me. Franklin de Camargo Junior Biomecânica na Ginástica Artística Franklin de Camargo-Junior Mestre em Ciências São Caetano do Sul 2014 CONTEXTUALIZAÇÃO Premissas:
Mecânica 1. Resumo e Exercícios P3
 Mecânica 1 Resumo e Exercícios P3 Conceitos 1. Dinâmica do Ponto 2. Dinâmica do Corpo Rígido 1. Dinâmica do Ponto a. Quantidade de Movimento Linear Vetorial Instantânea Q = m v b. Quantidade de Movimento
Mecânica 1 Resumo e Exercícios P3 Conceitos 1. Dinâmica do Ponto 2. Dinâmica do Corpo Rígido 1. Dinâmica do Ponto a. Quantidade de Movimento Linear Vetorial Instantânea Q = m v b. Quantidade de Movimento
Metodologias integradas de gestão da qualidade ecológica. Métodos de evidência ponderada
 Metodologias integradas de gestão da qualidade ecológica Métodos de evidência ponderada Modelo de informação e gestão ambiental Activ. humanas Respostas Pressões Impacte Modelo DPSIR Estado LOE - Linha
Metodologias integradas de gestão da qualidade ecológica Métodos de evidência ponderada Modelo de informação e gestão ambiental Activ. humanas Respostas Pressões Impacte Modelo DPSIR Estado LOE - Linha
Cinesiologia. PARTE II Força Torque e Alavancas
 Cinesiologia PARTE II Força Torque e Alavancas 43 DISCIPLINAS CINESIOLOGIA BIOMECÂNICA FISIOLOGIA TREINAMENTO PSICOLOGIA COMPORTAMENTO MOTOR FILOSOFIA 44 Conceitos CINESIOLOGIA estudo do movimento BIOMECÂNICA
Cinesiologia PARTE II Força Torque e Alavancas 43 DISCIPLINAS CINESIOLOGIA BIOMECÂNICA FISIOLOGIA TREINAMENTO PSICOLOGIA COMPORTAMENTO MOTOR FILOSOFIA 44 Conceitos CINESIOLOGIA estudo do movimento BIOMECÂNICA
LISTA DE EXERCÍCIOS 1
 LISTA DE EXERCÍCIOS 1 Esta lista trata dos conceitos de cinemática 1D, cinemática 2D, leis de Newton e aplicações. Tais temas são abordados nos capítulos 2, 3, 4 e 5 do livro-texto: Moysés Nussenzveig,
LISTA DE EXERCÍCIOS 1 Esta lista trata dos conceitos de cinemática 1D, cinemática 2D, leis de Newton e aplicações. Tais temas são abordados nos capítulos 2, 3, 4 e 5 do livro-texto: Moysés Nussenzveig,
Segundo Exercício de Modelagem e Simulação Computacional Maio 2012 EMSC#2 - MECÂNICA B PME 2200
 Segundo Exercício de Modelagem e Simulação Computacional Maio 01 EMSC# - MECÂNICA B PME 00 1. ENUNCIADO DO PROBLEMA Um planador (vide Fig. 1) se aproxima da pista do aeroporto para pouso com ângulo de
Segundo Exercício de Modelagem e Simulação Computacional Maio 01 EMSC# - MECÂNICA B PME 00 1. ENUNCIADO DO PROBLEMA Um planador (vide Fig. 1) se aproxima da pista do aeroporto para pouso com ângulo de
Aula 3 Controle Postural
 E-mail: daniel.boari@ufabc.edu.br Universidade Federal do ABC Princípios de Reabilitação e Tecnologias Assistivas 3º Quadrimestre de 2018 Sistema de controle postural Centro de gravidade Centro de pressão
E-mail: daniel.boari@ufabc.edu.br Universidade Federal do ABC Princípios de Reabilitação e Tecnologias Assistivas 3º Quadrimestre de 2018 Sistema de controle postural Centro de gravidade Centro de pressão
Centro Federal de Educação Tecnológica de Santa Catarina Departamento de Eletrônica Retificadores. Prof. Clóvis Antônio Petry.
 Centro Federal de Educação Tecnológica de Santa Catarina Departamento de Eletrônica Retificadores Correntes e Tensões Alternadas Senoidais Prof. Clóvis Antônio Petry. Florianópolis, julho de 2007. Bibliografia
Centro Federal de Educação Tecnológica de Santa Catarina Departamento de Eletrônica Retificadores Correntes e Tensões Alternadas Senoidais Prof. Clóvis Antônio Petry. Florianópolis, julho de 2007. Bibliografia
MOVIMENTO 3D REFERENCIAL AUXILIAR EM TRANSLAÇÃO. QUESTÃO ver vídeo 1.1
 MOVIMENTO 3D REFERENCIAL AUXILIAR EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço comanda o giro do braço
MOVIMENTO 3D REFERENCIAL AUXILIAR EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço comanda o giro do braço
Física 1. Rotação e Corpo Rígido Resumo P3
 Física 1 Rotação e Corpo Rígido Resumo P3 Fórmulas e Resumo Teórico Momento Angular - Considerando um corpo de massa m a um momento linear p, temos: L = r p = r mv Torque - Considerando uma força F em
Física 1 Rotação e Corpo Rígido Resumo P3 Fórmulas e Resumo Teórico Momento Angular - Considerando um corpo de massa m a um momento linear p, temos: L = r p = r mv Torque - Considerando uma força F em
5ª FICHA DE AVALIAÇÃO CIÊNCIAS NATURAIS - 7º ANO DE ESCOLARIDADE NOME Nº TURMA. Enc.Ed. Prof. Classif.
 5ª FICHA DE AVALIAÇÃO CIÊNCIAS NATURAIS - 7º ANO DE ESCOLARIDADE NOME Nº TURMA DATA / / 2013 Enc.Ed. Prof. Classif. Obs. - Lê com atenção todas as questões e procura responder de forma clara e sucinta
5ª FICHA DE AVALIAÇÃO CIÊNCIAS NATURAIS - 7º ANO DE ESCOLARIDADE NOME Nº TURMA DATA / / 2013 Enc.Ed. Prof. Classif. Obs. - Lê com atenção todas as questões e procura responder de forma clara e sucinta