Introdução à Animação
|
|
|
- Caio Rosa César
- 7 Há anos
- Visualizações:
Transcrição
1 Introdução à Animação Soraia Raupp Musse 27/05/2013

2 Animação Modelar Ações dos objetos, ou seja, como objetos se MOVEM Como representar movimento de objetos? Como especificar movimento (interativamente ou através de um programa)? Animação Baseada em Física/regras Atores Autônomos Captura de movimento Onde a IA encontra a Animação?
?")
3 Exemplos Toy Story, BUGS Life, Schrek

4 Shrek 2 The Incredibles...

5

6 Percepção Persistência da Visão - positive afterimage- Exemplos: - flash - movimento

7 Animação Tradicional Primeiro longa-metragem Storyboard Rotoscopia Keyframe

8 Animação Assistida Computador auxilia no processo de rendering Idéia da Animação Modelada Idéia da Animação Modelada Problema?? Como adquirir o modelo??

9 Escaneamento 3D a) Scaner 3D a laser de mão ligado a um braço giratório b) Scaner 3D a laser giratório

10 Escaneamento 3D Nuvens de pontos: Modelos 3D em polígonos ou NURBS X-Men, Jurassic Park, Coração de Dragão, X-Men, Jurassic Park, Coração de Dragão, Alien A Ressurreição

11 Escaneamento 3D Escaneamento de toque com braço mecânico Godzilla

12 Em filmes: Canal Alfa

13 Renderização em Camadas

14 Jurassic Park (1993)
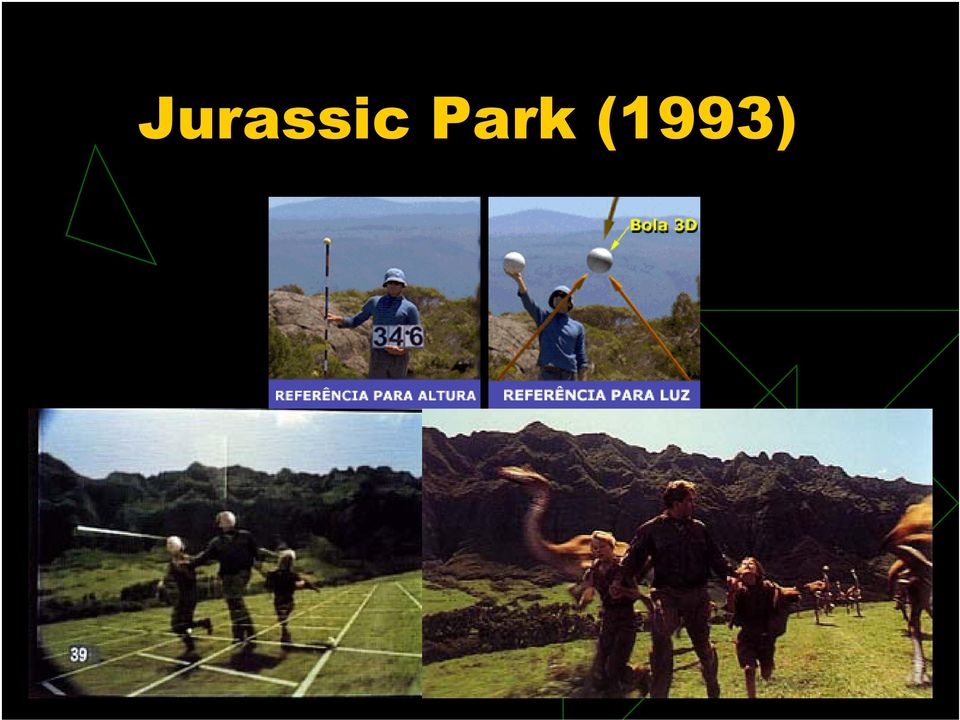
15 Jurassic Park (1993)
16 Uma vez tendo-se os modelos

17 O que significa o termo Animação Computadorizada? Geração de frames consecutivos que são exibidos numa freqüência suficiente para que o olho humano não consiga diferenciálos e tenha então a sensação de movimento OK! Mas, o que são frames??? O quão diferente eles devem ser? Em que frequência devem ser exibidos?

18 Técnicas de Animação Keyframe (Animação por quadros-chave) - keyframes são especificados pelo animador e o computador gera os quadros intermediários - Os quadros intermediários são gerados baseados numa lei de interpolação

19 Computer Animation

20 Técnicas de Animação Scripting Systems Visa oferecer uma linguagem de script (com comandos pré-definidos) que possa descrever a animação de objetos Ex: #ACTORS 5 ACTOR_1 FRAME=1 POSITION ACTOR_1 FRAME=100 POSITION

21 Some PIXAR s movies OVN08 z6ve c1vco&feature=related YEQ-M&feature=related y6xcw A_6e3M
22 Classificação de técnicas Diferenças Low-level High-level Intervenção do Muita usuário Nível de abstração Precisão do resultado em relação ao especificado Pouca Muita Pouca Muita Pouca
23 Controle Explícito Rotoscopia Terminator II (1991)
24 Controle Explícito Motion Capture
25 Animação Explícita Pré-processada (ex. MD2 Quake) Lista de vértices que variam em função do tempo
26 Animação Explícita Sprites animados Billboards, impostores
27 Técnicas High-level Partículas Corpos rígidos Corpos deformáveis Corpos articulados
28 Sistema material Composto por partículas ligadas entre si por relações Movimento: variação de posição e Movimento: variação de posição e orientação
29 Tipos de movimento Movimento interno (variação de distância entre os pontos internos) Não existe para corpos rígidos Movimento externo (variação de distância entre os pontos externos)
30 Partículas São corpos que não possuem dimensão Só possuem movimento translacional (não tem CM)
31 Física
32 Corpos rígidos Corpos com massa Possuem movimento translacional e rotacional Translacional (como se houvesse somente o CM) Rotacional: física considerando o torque Não possui movimento interno
33 Corpos Rígidos
34 Exemplos de Técnicas de Animação Motion Control Cinemática, dinâmica Kacic (2003)
35 Técnicas de Animação Corpos deformáveis
36 Corpos flexíveis Formado por partículas com 3 DOFs translacionais Existe movimento interno Métodos: Deformação geométrica FFD Restrições Deformação física
37 Deformação física: Sistemas Massa-mola Cada vértice representa um ponto de massa Cada aresta representa uma mola O comprimento de repouso das molas corresponde ao comprimento da aresta no instante inicial Atribui-se uma massa a um objeto e esta é distribuída entre seus pontos As constantes das molas também são atribuídas pelo usuário (normalmente usa-se uma única)
38 Sistemas Massa-mola Forças externas são aplicadas ao objeto globalmente (gravidade, vento, etc.) ou a um vértice específico (forças específicas), forçando seu deslocamento individual Problemas: o efeito da aplicação de uma força externa se propaga lentamente pelo objeto ( t) Número de vértices e comprimento das arestas influenciam no resultado final Distribuição dos vértices também influencia
39 Sistema Massa-mola: exemplo Instante t0 A força momentânea F é aplicada sobre V2 Calcula-se a aceleração em V2 e, em seguida, a velocidade e nova posição em V2 Instante t1 V2 sofre força das molas E12 e E23 V1 sofre força da mola E12 V3 sofre força da mola E23 Instante t2 V2 sofre força de E12 e E23 V1 sofre força de E12 e E31 V3 sofre força de E23 e E31 F MOLAi =-km.(pf-pr) *-km = elasticidade da mola *Pf=Ponto de extremidade fixa *Pr=Ponto de repouso
40 Exemplo em Músculos:
41 Vídeo: Elementos finitos
42 Técnicas de Animação Superfícies Flexíveis A Bela e a Fera
43 Técnicas de Animação
44 Corpos Articulados Hastes Articulações Forças/Torques Distribuição pelas hastes Base
45 Corpos articulados: Física Cinemática Cinemática direta: Tem velocidade inicial e calcula variação de posição Dificuldade de controle Cinemática inversa: Tem posição final e calcula velocidade inicial Melhor controle, mas pode possuir infinitas soluções
46 Corpos articulados: Física Dinâmica Dinâmica direta: Especifica força e calcula torque, acelerações angulares e lineares, velocidades e deslocamentos e lineares, velocidades e deslocamentos Dinâmica inversa: Tem posição final e calcula força inicial Princípio das reações vinculares: Para construir o vínculo, anulando os movimentos que não se deseja Ex: If Fx!= 0 && DOFx = 0 Then FX=0
47 Corpos Articulados e MOCAP Twist (2003) Vídeo: TwistSequence Customização de captured motion
48 Modelagem de Humanos Virtuais
49 Modelagem de HV Modelagem do corpo Modelagem da face Modelagem das mãos Modelagem de cabelos
50 Representação hierárquica São compostos por: malhas, esqueleto, materiais e animação; A malha serve para determinar a aparência física do personagem e é formada por polígonos compostos por um conjunto de vértices: 5
51 Representação hierárquica Para esta malha ser animada, são utilizados esqueletos hierárquicos para criar um modelo geométrico articulado. O esqueleto é um sistema hierárquico de objetos representado por ossos e suas juntas. 5
52 Representação hierárquica Para unir a malha ao esqueleto (rigging), os vértices da malha são associados aos ossos do corpo. Ao realizar rotações nas juntas do personagem, os vértices que fazem parte do esqueleto são também alterados, bem como as malhas que dão volume ao humanóide. O movimento de uma junta pode ser sem deformação (a) ou com deformação (b). 5
53 Trabalhos Relacionados Pode-se classificar a criação de personagens virtuais em: Construção manual; Captura de corpos reais; Variação de geometrias existentes. 53
54 Modelagem por Construção Manual Necessário conhecimento especializado (artístico e em ferramentas de autoria) Modelos multicamadas: [Whilhelms 1997] [Scheepers 1997] [Nedel 1998] 54
55 Modelagem do corpo Modelos de superfície: Metaballs Definidos por objetos cilíndricos parametrizáveis
56 Modelagem do corpo Modelos de superfície: Metaballs Definidos por objetos cilíndricos parametrizáveis
57 Captura de corpos reais Scanner 3D ([Amenta 1999][Dekker 2000]) Imagens ([Kakadiaris 1995][Hilton 1999]) Vídeos ([Plaenkers 1999]) imagens de entrada (esq.) e modelo reconstruído (dir.) - Hilton 57
58
59 Variação de geometria existente Jack [Azuola 1994]: Spreadsheet Anthropometry Scaling System (SASS) Humanóide dividido em 31 segmentos Hyewon Seo e Nadia Magnenat-Thalman (2003) Ao invés de dados estatísticos, utilizam tamanhos e formas de pessoas obtidos por scanners 3D Baseado em um modelo base Novas geometrias são criadas por parâmetros antropométricos 59
60 Variação de geometria existente Brett Allen (2003): Tamanhos e formas de pessoas por scanners 3D Marcadores Gera outros modelos a partir de exemplos Lucia Modesto (PDI/Dreamworks ) Criação de personagens secundários para Shrek Alongando/encolhendo corpos e utilizando diferentes texturas de roupas e variações de formas de roupa, cabeça, chapéu 60
61 Formas de corpos: Somatotipo by Andre Tavares 61
62 Resultados altura: 171,5 cm; peso: 100,5 Kg; somatotipo: 4-8-½ altura: 171,5 cm; peso: 63,8 Kg; somatotipo:
63 Formas variadas de engorde É possível informar mais de uma tabela de dimensões para cada um dos somatotipos dominantes, permitindo uma maior diversidade de formas. Ganho de peso principalmente no abdômen e parte superior do corpo Ganho de peso principalmente nas cochas e nádegas Ganho de peso ocorre uniformemente em todo o corpo 63
64 Resultados altura: 168,2 cm; peso: 56,5 Kg; somatotipo: 4½-2½-3½ altura: 168,2 cm; peso: 79 Kg; somatotipo: 8½-2-½ 64


65 Resultados altura: 176,1 cm; peso: 56,5 Kg; somatotipo: 4½-2½-3½ altura: 176,1 cm; peso: 83 Kg; somatotipo: 8½-2-½ 65
66 Resultados Baixa Resolução (270 polígonos) 66
67 Resultados Personagem não humano 67
68 Resultados 68
69
Técnicas de Animação. Soraia Raupp Musse 01/04/2014
 Técnicas de Animação Soraia Raupp Musse 01/04/2014 Aula passada: Classificação de técnicas Diferenças Low-level High-level Intervenção do Muita usuário Nível de abstração Precisão do resultado em relação
Técnicas de Animação Soraia Raupp Musse 01/04/2014 Aula passada: Classificação de técnicas Diferenças Low-level High-level Intervenção do Muita usuário Nível de abstração Precisão do resultado em relação
Introdução a Animação. Soraia Raupp Musse
 Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução a Animação. Soraia Raupp Musse
 Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento Histórico Fascinação por contar estórias com imagens em movimento Processo global (animação toolkit)
Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento Histórico Fascinação por contar estórias com imagens em movimento Processo global (animação toolkit)
Introdução a Animação. Soraia Raupp Musse
 Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Técnicas de Animação. Soraia Raupp Musse
 Técnicas de Animação Soraia Raupp Musse Aula passada: Classificação de técnicas Diferenças Low-level High-level Intervenção do usuário Nível de abstração Precisão do resultado em relação ao especificado
Técnicas de Animação Soraia Raupp Musse Aula passada: Classificação de técnicas Diferenças Low-level High-level Intervenção do usuário Nível de abstração Precisão do resultado em relação ao especificado
Representação de Objetos e Cenas. Soraia Musse
 Representação de Objetos e Cenas Soraia Musse Roteiro 1. Formas de Representação 1.1. Representação Aramada 1.2. Superfícies Limitantes 1.3. Enumeração Espacial 1.4. Representação Paramétrica 1.5. Grafo
Representação de Objetos e Cenas Soraia Musse Roteiro 1. Formas de Representação 1.1. Representação Aramada 1.2. Superfícies Limitantes 1.3. Enumeração Espacial 1.4. Representação Paramétrica 1.5. Grafo
Transformações 3D. Soraia Raupp Musse
 Transformações 3D Soraia Raupp Musse 1 Transformações 3D Translação gltranslatef(dx, dy, dz) T(dx, dy, dz): 1 1 1 dz dy dx 2 Escala glscalef(sx, Sy, Sz) S(Sx, Sy, Sz): 1 1 Sz Sy Sx Transformações 3D Rotação
Transformações 3D Soraia Raupp Musse 1 Transformações 3D Translação gltranslatef(dx, dy, dz) T(dx, dy, dz): 1 1 1 dz dy dx 2 Escala glscalef(sx, Sy, Sz) S(Sx, Sy, Sz): 1 1 Sz Sy Sx Transformações 3D Rotação
Introdução a Animação. Soraia Raupp Musse
 Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução a Animação. Soraia Raupp Musse
 Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução a Animação Soraia Raupp Musse Histórico Fascinação por contar estórias com imagens em movimento http://trailers.apple.com/trailers/fox/avatar/ Histórico Fascinação por contar estórias com imagens
Introdução II - NATAL project
 Introdução II - NATAL project Processo de Animação Escaneamento 3D Nuvens de pontos: Modelos 3D em polígonos ou NURBS X-Men, Jurassic Park, Coração de Dragão, Alien A Ressurreição Movimento: O Jovem Rotoscopia
Introdução II - NATAL project Processo de Animação Escaneamento 3D Nuvens de pontos: Modelos 3D em polígonos ou NURBS X-Men, Jurassic Park, Coração de Dragão, Alien A Ressurreição Movimento: O Jovem Rotoscopia
O que é CG?? Soraia Raupp Musse
 O que é CG?? Soraia Raupp Musse Processamento Gráfico Modelagem Multimídia RV Usuário Visão Modelos Gráfico Tempo Animação Vídeo Imagens Processamento de Imagens O que NÃO é CG?? Processamento de Imagens
O que é CG?? Soraia Raupp Musse Processamento Gráfico Modelagem Multimídia RV Usuário Visão Modelos Gráfico Tempo Animação Vídeo Imagens Processamento de Imagens O que NÃO é CG?? Processamento de Imagens
Transformações 3D. Soraia Raupp Musse
 Transformações 3D Soraia Raupp Musse 1 Transformações 3D Translação gltranslatef(dx, dy, dz) T(dx, dy, dz): 1 1 1 dz dy dx 2 Escala glscalef(sx, Sy, Sz) S(Sx, Sy, Sz): 1 1 Sz Sy Sx Transformações 3D Rotação
Transformações 3D Soraia Raupp Musse 1 Transformações 3D Translação gltranslatef(dx, dy, dz) T(dx, dy, dz): 1 1 1 dz dy dx 2 Escala glscalef(sx, Sy, Sz) S(Sx, Sy, Sz): 1 1 Sz Sy Sx Transformações 3D Rotação
Um Sistema de Animação Baseado em Movimento Capturado
 Um Sistema de Animação Baseado em Movimento Capturado Fernando Wagner Serpa Vieira da Silva LCG - COPPE/SISTEMAS - UFRJ Rio de Janeiro - Brasil Outline da Apresentação Animação por Computador Animação
Um Sistema de Animação Baseado em Movimento Capturado Fernando Wagner Serpa Vieira da Silva LCG - COPPE/SISTEMAS - UFRJ Rio de Janeiro - Brasil Outline da Apresentação Animação por Computador Animação
Processamento Gráfico
 Processamento Gráfico Marcelo Walter UFPE Agosto/2008 Sumário Temas da Computação Gráfica Principais aplicações Assuntos Administrativos 1 O que é Computação Gráfica? Objetos Fontes de Luz Interação Dados
Processamento Gráfico Marcelo Walter UFPE Agosto/2008 Sumário Temas da Computação Gráfica Principais aplicações Assuntos Administrativos 1 O que é Computação Gráfica? Objetos Fontes de Luz Interação Dados
Animação Computadorizada
 Animação Computadorizada UFPE Alguns slides cedidos por Soraia Musse (PUC/RS) Última atualização/junho 2009 O que é Animação? Animar significa dar vida a um objeto, imagem ou desenho sem vida Alma em latim
Animação Computadorizada UFPE Alguns slides cedidos por Soraia Musse (PUC/RS) Última atualização/junho 2009 O que é Animação? Animar significa dar vida a um objeto, imagem ou desenho sem vida Alma em latim
Introdução à Computação Gráfica
 Introdução à Computação Gráfica André Tavares da Silva andre.silva@udesc.br Ementa Conceitos Básico; Dispositivos Gráficos; Sistemas de Cores; Transformações geométricas; Primitivas gráficas; Visibilidade;
Introdução à Computação Gráfica André Tavares da Silva andre.silva@udesc.br Ementa Conceitos Básico; Dispositivos Gráficos; Sistemas de Cores; Transformações geométricas; Primitivas gráficas; Visibilidade;
Revisão. Soraia Raupp Musse
 Revisão Soraia Raupp Musse Processamento Gráfico Modelagem Multimídia RV Usuário Visão Modelos Gráfico Tempo Animação Vídeo Imagens Processamento de Imagens Processamento de Imagens Modelagem Multimídia
Revisão Soraia Raupp Musse Processamento Gráfico Modelagem Multimídia RV Usuário Visão Modelos Gráfico Tempo Animação Vídeo Imagens Processamento de Imagens Processamento de Imagens Modelagem Multimídia
Princípios Físicos do Controle Ambiental
 Princípios Físicos do Controle Ambiental Capítulo 02 Conceitos Básicos Sobre Mecânica Técnico em Controle Ambiental 18/05/2017 Prof. Márcio T. de Castro Parte I 2 Mecânica Mecânica: ramo da física dedicado
Princípios Físicos do Controle Ambiental Capítulo 02 Conceitos Básicos Sobre Mecânica Técnico em Controle Ambiental 18/05/2017 Prof. Márcio T. de Castro Parte I 2 Mecânica Mecânica: ramo da física dedicado
Modelo Massa-Mola aplicado na deformação da malha de um fígado.
 Modelo Massa-Mola aplicado na deformação da malha de um fígado. Victor Adriel de Jesus Oliveira Instituto de Informática Universidade Federal do Rio Grande do Sul (UFRGS) Caixa Postal 15.064 91.501-970
Modelo Massa-Mola aplicado na deformação da malha de um fígado. Victor Adriel de Jesus Oliveira Instituto de Informática Universidade Federal do Rio Grande do Sul (UFRGS) Caixa Postal 15.064 91.501-970
MOVIMENTO OSCILATÓRIO
 MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
MOVIMENTO OSCILATÓRIO 1.0 Noções da Teoria da Elasticidade A tensão é o quociente da força sobre a área aplicada (N/m²): As tensões normais são tensões cuja força é perpendicular à área. São as tensões
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo
 Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
Computação Gráfica Interativa Animação Computação Cognitiva Vida Artificial
 Computação Gráfica Interativa Animação Computação Cognitiva Vida Artificial Prof. Dr. Depto. Engenharia de Sistemas Eletrônicos Escola Politécnica - Universidade de São Paulo Índice Computação Gráfica
Computação Gráfica Interativa Animação Computação Cognitiva Vida Artificial Prof. Dr. Depto. Engenharia de Sistemas Eletrônicos Escola Politécnica - Universidade de São Paulo Índice Computação Gráfica
Curvas e Superfícies. Profª Soraia Raupp Musse
 Curvas e Superfícies Profª Soraia Raupp Musse Classificação Curvas Apenas comprimento 2 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3 Classificação Sólidos
Curvas e Superfícies Profª Soraia Raupp Musse Classificação Curvas Apenas comprimento 2 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3 Classificação Sólidos
Dinâmica. Prof.ª Betty Carvalho Rocha Gonçalves do Prado
 Dinâmica Prof.ª Betty Carvalho Rocha Gonçalves do Prado betty.prado@kroton.com.br bettycarvalho@ig.com.br CORPO RÍGIDO São corpos cuja dimensões não são desprezáveis Corpo rígido É um conceito limite ideal,
Dinâmica Prof.ª Betty Carvalho Rocha Gonçalves do Prado betty.prado@kroton.com.br bettycarvalho@ig.com.br CORPO RÍGIDO São corpos cuja dimensões não são desprezáveis Corpo rígido É um conceito limite ideal,
Curvas e Superfícies. Profª Soraia Raupp Musse
 Curvas e Superfícies Profª Soraia Raupp Musse Classificação Curvas Apenas comprimento 2 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3 Classificação Sólidos
Curvas e Superfícies Profª Soraia Raupp Musse Classificação Curvas Apenas comprimento 2 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3 Classificação Sólidos
Programa. Tópicos Especiais I Jogos A game is a serie of interesting choices (Sid Meier) Tópicos que serão abordados Avaliação
 Tópicos que serão abordados Avaliação") Tópicos Especiais I Jogos A game is a serie of interesting choices (Sid Meier) Christian Hofsetz, Fernando Osório, Marinho Barcelos e Soraia Musse 31/07/2006 Programa Tópicos que serão abordados Avaliação
Tópicos Especiais I Jogos A game is a serie of interesting choices (Sid Meier) Christian Hofsetz, Fernando Osório, Marinho Barcelos e Soraia Musse 31/07/2006 Programa Tópicos que serão abordados Avaliação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
Apresentação Outras Coordenadas... 39
 Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Estudo dos momentos e forças articulares. Problema da dinâmica inversa. Ana de David Universidade de Brasília
 Estudo dos momentos e forças articulares Problema da dinâmica inversa Ana de David Universidade de Brasília Estudo dos momentos e forças articulares Momentos atuam para produzir acelerações lineares enquanto
Estudo dos momentos e forças articulares Problema da dinâmica inversa Ana de David Universidade de Brasília Estudo dos momentos e forças articulares Momentos atuam para produzir acelerações lineares enquanto
As variáveis de rotação
 Capítulo 10 Rotação Neste capítulo vamos estudar o movimento de rotação de corpos rígidos sobre um eixo fixo. Para descrever esse tipo de movimento, vamos introduzir os seguintes conceitos novos: -Deslocamento
Capítulo 10 Rotação Neste capítulo vamos estudar o movimento de rotação de corpos rígidos sobre um eixo fixo. Para descrever esse tipo de movimento, vamos introduzir os seguintes conceitos novos: -Deslocamento
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
Terceira Lista de Exercício de Dinâmica e Controle de Veículos Espaciais
 Terceira Lista de Exercício de Dinâmica e Controle de Veículos Espaciais Questão 1 Considerando os momentos de inércia de um corpo no sistema de eixos principais de inércia com origem no centro de massa
Terceira Lista de Exercício de Dinâmica e Controle de Veículos Espaciais Questão 1 Considerando os momentos de inércia de um corpo no sistema de eixos principais de inércia com origem no centro de massa
Computação Gráfica - 11
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 11 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 11 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Sistemas de Partículas. Soraia Raupp Musse
 Sistemas de Partículas Soraia Raupp Musse Sistemas de Partículas CONCEITO: Conjunto de partículas cujo comportamento evolui no tempo de acordo com regras algorítmicas com o objetivo de simular um fenômeno
Sistemas de Partículas Soraia Raupp Musse Sistemas de Partículas CONCEITO: Conjunto de partículas cujo comportamento evolui no tempo de acordo com regras algorítmicas com o objetivo de simular um fenômeno
Exemplo. T 1 2g = -2a T 2 g = a. τ = I.α. T 1 T 2 g = - 3a a g = - 3a 4a = g a = g/4. τ = (T 1 T 2 )R. T 1 T 2 = Ma/2 T 1 T 2 = a.
R. T 1 T 2 = Ma/2 T 1 T 2 = a.") Exercícios Petrobras 2008 eng. de petróleo Dois corpos de massa m 1 = 2 kg e m 2 = 1 kg estão fixados às pontas de uma corda com massa e elasticidade desprezíveis, a qual passa por uma polia presa ao
Exercícios Petrobras 2008 eng. de petróleo Dois corpos de massa m 1 = 2 kg e m 2 = 1 kg estão fixados às pontas de uma corda com massa e elasticidade desprezíveis, a qual passa por uma polia presa ao
O Sistema Massa-Mola
 O Sistema Massa-Mola 1 O sistema massa mola, como vimos, é um exemplo de sistema oscilante que descreve um MHS. Como sabemos (aplicando a Segunda Lei de Newton) temos que F = ma Como sabemos, no caso massa-mola
O Sistema Massa-Mola 1 O sistema massa mola, como vimos, é um exemplo de sistema oscilante que descreve um MHS. Como sabemos (aplicando a Segunda Lei de Newton) temos que F = ma Como sabemos, no caso massa-mola
Computação Gráfica II
 Computação Gráfica II Representação de Objetos Prof. Rodrigo Rocha prof.rodrigorocha@yahoo.com http://www.bolinhabolinha.com Pipeline de visualização 3D 1 Representação dos objetos Aramada (Wire frame)
Computação Gráfica II Representação de Objetos Prof. Rodrigo Rocha prof.rodrigorocha@yahoo.com http://www.bolinhabolinha.com Pipeline de visualização 3D 1 Representação dos objetos Aramada (Wire frame)
Física I 2010/2011. Aula 13 Rotação I
 Física I 2010/2011 Aula 13 Rotação I Sumário As variáveis do movimento de rotação As variáveis da rotação são vectores? Rotação com aceleração angular constante A relação entre as variáveis lineares e
Física I 2010/2011 Aula 13 Rotação I Sumário As variáveis do movimento de rotação As variáveis da rotação são vectores? Rotação com aceleração angular constante A relação entre as variáveis lineares e
FEP Física Geral e Experimental para Engenharia I
 FEP195 - Física Geral e Experimental para Engenharia I Prova P3 - Gabarito 1. Três partículas de massa m estão presas em uma haste fina e rígida de massa desprezível e comprimento l. O conjunto assim formado
FEP195 - Física Geral e Experimental para Engenharia I Prova P3 - Gabarito 1. Três partículas de massa m estão presas em uma haste fina e rígida de massa desprezível e comprimento l. O conjunto assim formado
Modelagem de Objetos. Soraia Musse
 Modelagem de Objetos Soraia Musse Roteiro Técnicas de Modelagem 3D Varredura CSG Instanciamento de Primitivas Fractais Sistemas de Partículas OBS.: Estes slides foram elaborados a partir do material dos
Modelagem de Objetos Soraia Musse Roteiro Técnicas de Modelagem 3D Varredura CSG Instanciamento de Primitivas Fractais Sistemas de Partículas OBS.: Estes slides foram elaborados a partir do material dos
Força. Aceleração (sai ou volta para o repouso) Força. Vetor. Aumenta ou diminui a velocidade; Muda de direção. Acelerar 1kg de massa a 1m/s 2 (N)
 Força. Vetor. Aumenta ou diminui a velocidade; Muda de direção. Acelerar 1kg de massa a 1m/s 2 (N)") Força Empurrão ou puxão; Força é algo que acelera ou deforma alguma coisa; A força exercida por um objeto sobre o outro é correspondida por outra igual em magnitude, mas no sentido oposto, que é exercida
Força Empurrão ou puxão; Força é algo que acelera ou deforma alguma coisa; A força exercida por um objeto sobre o outro é correspondida por outra igual em magnitude, mas no sentido oposto, que é exercida
Instituto Politécnico de Tomar Escola Superior de Tecnologia de Tomar ÁREA INTERDEPARTAMENTAL DE FÍSICA
 Engenharia Civil Exercícios de Física de Física Ficha 8 Corpo Rígido Capítulo 6 Ano lectivo 010-011 Conhecimentos e capacidades a adquirir pelo aluno Aplicação das leis fundamentais da dinâmica. Aplicação
Engenharia Civil Exercícios de Física de Física Ficha 8 Corpo Rígido Capítulo 6 Ano lectivo 010-011 Conhecimentos e capacidades a adquirir pelo aluno Aplicação das leis fundamentais da dinâmica. Aplicação
Física 1-2ª Prova 19/05/2012
 Física 1-2ª Prova 19/05/2012 NOME MATRÍCULA TURMA PROF. Lembrete: 1. Leia os enunciados com atenção. 2. Tente, responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. 3.
Física 1-2ª Prova 19/05/2012 NOME MATRÍCULA TURMA PROF. Lembrete: 1. Leia os enunciados com atenção. 2. Tente, responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. 3.
Parte 2 - P2 de Física I NOME: DRE Teste 1
 Parte 2 - P2 de Física I - 2017-1 NOME: DRE Teste 1 Nota Q1 Questão 1 - [3,7 ponto] Um carretel é composto por um cilindro interno de raio r = R/2 e massa M, enrolado por um fio ideal, com 2 discos idênticos,
Parte 2 - P2 de Física I - 2017-1 NOME: DRE Teste 1 Nota Q1 Questão 1 - [3,7 ponto] Um carretel é composto por um cilindro interno de raio r = R/2 e massa M, enrolado por um fio ideal, com 2 discos idênticos,
Cap.12: Rotação de um Corpo Rígido
 Cap.12: Rotação de um Corpo Rígido Do professor para o aluno ajudando na avaliação de compreensão do capítulo. Fundamental que o aluno tenha lido o capítulo. Introdução: Produto vetorial Ilustração da
Cap.12: Rotação de um Corpo Rígido Do professor para o aluno ajudando na avaliação de compreensão do capítulo. Fundamental que o aluno tenha lido o capítulo. Introdução: Produto vetorial Ilustração da
MODELAGEM GEOMÉTRICA
 MODELAGEM GEOMÉTRICA 1 Tríade da Computação Gráfica Forma Modelagem Geométrica Aparência Renderização Ação Animação 2 1 Modelagem Geométrica Área da Computação Gráfica que estuda a criação de modelos dos
MODELAGEM GEOMÉTRICA 1 Tríade da Computação Gráfica Forma Modelagem Geométrica Aparência Renderização Ação Animação 2 1 Modelagem Geométrica Área da Computação Gráfica que estuda a criação de modelos dos
LISTA DE EXERCÍCIOS Nº 10. 2) O que ocorre com o ioiô inicialmente estacionário da Figura 2 se este é excitado por uma força (a) F 2, (b)
 O que ocorre com o ioiô inicialmente estacionário da Figura 2 se este é excitado por uma força (a) F 2, (b)") LISTA DE EXERCÍCIOS Nº 10 Questões 1) Na Figura 1, 3 forças de mesma magnitude são aplicadas em uma partícula que encontra-se na origem do sistema de referência. Ordene as forças de acordo com as magnitudes
LISTA DE EXERCÍCIOS Nº 10 Questões 1) Na Figura 1, 3 forças de mesma magnitude são aplicadas em uma partícula que encontra-se na origem do sistema de referência. Ordene as forças de acordo com as magnitudes
Animação Estruturas Articuladas
 Animação de Estruturas Articuladas Conteúdo 1.Introdução 2.Técnicas de Animação 3.Cinemática Directa e Inversa 4.Representação de Figuras Articuladas 5.Cinemática Inversa 6.Caso de Estudo Página 1 1.Introdução
Animação de Estruturas Articuladas Conteúdo 1.Introdução 2.Técnicas de Animação 3.Cinemática Directa e Inversa 4.Representação de Figuras Articuladas 5.Cinemática Inversa 6.Caso de Estudo Página 1 1.Introdução
Aluno Data Curso / Turma Professor
 Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
Cada questão objetiva vale 0,7 ponto
 Instituto de Física Segunda Prova de Física I 2017/1 Nas questões em que for necessário, considere que: todos os fios e molas são ideais; os fios permanecem esticados durante todo o tempo; a resistência
Instituto de Física Segunda Prova de Física I 2017/1 Nas questões em que for necessário, considere que: todos os fios e molas são ideais; os fios permanecem esticados durante todo o tempo; a resistência
Prof. MSc. David Roza José -
 1/14 2/14 Introdução Conforme mencionado anteriormente, um sistema com n graus de liberdade necessita de n coordenadas independentes para descrever sua configuração e movimento. Normalmente essas coordenadas
1/14 2/14 Introdução Conforme mencionado anteriormente, um sistema com n graus de liberdade necessita de n coordenadas independentes para descrever sua configuração e movimento. Normalmente essas coordenadas
DRAMATIZAÇÃO 3D DE HISTÓRIAS INTERATIVAS GERADAS AUTOMATICAMENTE
 DRAMATIZAÇÃO 3D DE HISTÓRIAS INTERATIVAS GERADAS AUTOMATICAMENTE Aluno: Gabriel Valtes Pires Orientador: Antonio L. Furtado Introdução A área de construção automática de narrativas, também denominada storytelling,
DRAMATIZAÇÃO 3D DE HISTÓRIAS INTERATIVAS GERADAS AUTOMATICAMENTE Aluno: Gabriel Valtes Pires Orientador: Antonio L. Furtado Introdução A área de construção automática de narrativas, também denominada storytelling,
3 Modelagem Micro-Mecânica Discreta de Solos Granulares
 3 Modelagem Micro-Mecânica Discreta de Solos Granulares 3.1. Considerações Iniciais Neste Capítulo será abordada a questão da modelagem numérica dos solos granulares e das fibras utilizadas como reforço,
3 Modelagem Micro-Mecânica Discreta de Solos Granulares 3.1. Considerações Iniciais Neste Capítulo será abordada a questão da modelagem numérica dos solos granulares e das fibras utilizadas como reforço,
António Costa. Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Preâmbulo Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti Computação Gráfica Modelos Matemáticos Análise (reconhecimento de
Introdução à Computação Gráfica Preâmbulo Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti Computação Gráfica Modelos Matemáticos Análise (reconhecimento de
Física 1. 2 a prova 03/06/2017. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 2 a prova 03/06/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Física 1 2 a prova 03/06/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Simulação de Objetos Deformáveis Baseada na Análise Dinâmica
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL INSTITUTO DE INFORMÁTICA CURSO DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO Simulação de Objetos Deformáveis Baseada na Análise Dinâmica por Luciana Porcher Nedel
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL INSTITUTO DE INFORMÁTICA CURSO DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO Simulação de Objetos Deformáveis Baseada na Análise Dinâmica por Luciana Porcher Nedel
Física 1. 2 a prova 03/06/2017. Atenção: Leia as recomendações antes de fazer a prova.
 Física 1 2 a prova 03/06/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
Física 1 2 a prova 03/06/2017 Atenção: Leia as recomendações antes de fazer a prova. 1- Assine seu nome de forma LEGÍVEL na folha do cartão de respostas. 2- Leia os enunciados com atenção. 3- Analise sua
4 Impostores com Relevo
 63 4 Impostores com Relevo I just wish... I wish I knew what I'm supposed to do. That's all. I just wish I knew. (The Matrix) 4.1 Introdução Os objetos modelados por texturas com relevo, por corrigirem
63 4 Impostores com Relevo I just wish... I wish I knew what I'm supposed to do. That's all. I just wish I knew. (The Matrix) 4.1 Introdução Os objetos modelados por texturas com relevo, por corrigirem
SIMULAÇÃO DO IMPACTO DE UMA ESFERA RÍGIDA SOBRE PLACAS PLANAS
 17º Simpósio do Programa de Pós-graduação em Engenharia Mecânica Universidade Federal de Uberlândia Faculdade de Engenharia Mecânica SIMULAÇÃO DO IMPACTO DE UMA ESFERA RÍGIDA SOBRE PLACAS PLANAS Matthieu
17º Simpósio do Programa de Pós-graduação em Engenharia Mecânica Universidade Federal de Uberlândia Faculdade de Engenharia Mecânica SIMULAÇÃO DO IMPACTO DE UMA ESFERA RÍGIDA SOBRE PLACAS PLANAS Matthieu
Parte 2 - PF de Física I NOME: DRE Teste 1
 Parte 2 - PF de Física I - 2017-1 NOME: DRE Teste 1 Nota Q1 Questão 1 - [2,5 ponto] Um astronauta está ligado a uma nave no espaço através de uma corda de 120 m de comprimento, que está completamente estendida
Parte 2 - PF de Física I - 2017-1 NOME: DRE Teste 1 Nota Q1 Questão 1 - [2,5 ponto] Um astronauta está ligado a uma nave no espaço através de uma corda de 120 m de comprimento, que está completamente estendida
Profº Carlos Alberto
 Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
Rotação Disciplina: Mecânica Básica Professor: Carlos Alberto Objetivos de aprendizagem Ao estudar este capítulo você aprenderá: Como descrever a rotação de um corpo rígido em termos da coordenada angular,
MECÂNICA GERAL Apostila 3 : Rotação do Corpo Rígido. Professor Renan
 MECÂNICA GERAL Apostila 3 : Rotação do Corpo Rígido Professor Renan 1 Centro de massa Um corpo extenso pode ser considerado um sistema de partículas, cada uma com sua massa. A resultante total das massas
MECÂNICA GERAL Apostila 3 : Rotação do Corpo Rígido Professor Renan 1 Centro de massa Um corpo extenso pode ser considerado um sistema de partículas, cada uma com sua massa. A resultante total das massas
Questões Conceituais
 Questões em Sala de Aula Módulo 3 Parte A Questões Conceituais QC.1) Suponha que somente duas forças externas atuem sobre um corpo rígido estacionário, e que elas são iguais em módulo e de direções opostas.
Questões em Sala de Aula Módulo 3 Parte A Questões Conceituais QC.1) Suponha que somente duas forças externas atuem sobre um corpo rígido estacionário, e que elas são iguais em módulo e de direções opostas.
PESQUI SA. Introdução à Dinâmica de Mecanismosflexíveis. l.:...introdução
 PESQUI SA Introdução à Dinâmica de Mecanismosflexíveis Armando Morado Ferreira* Clódio Alberto Pastro Saneto* importância dos efeitos decorrentes da flexibilidade dos componentes de l.:...introdução A.
PESQUI SA Introdução à Dinâmica de Mecanismosflexíveis Armando Morado Ferreira* Clódio Alberto Pastro Saneto* importância dos efeitos decorrentes da flexibilidade dos componentes de l.:...introdução A.
Rotações de corpos rígidos
 Rotações de corpos rígidos Alexandre Furlan Fundamentos de Mecânica - FIS065 Turmas E1 E2 E3 29 de outubro de 2018 Alexandre Furlan (Aula 18) Fundamentos de Mecânica 29 de outubro de 2018 1 / 10 Objetivos
Rotações de corpos rígidos Alexandre Furlan Fundamentos de Mecânica - FIS065 Turmas E1 E2 E3 29 de outubro de 2018 Alexandre Furlan (Aula 18) Fundamentos de Mecânica 29 de outubro de 2018 1 / 10 Objetivos
Teresa C. S. Azevedo
 Teresa C. S. Azevedo Orientador: Prof. João Manuel R. S. Tavares Co-orientador: Prof. Mário A. P. Vaz Sumário: I. Reconstrução 3D do corpo humano: i. Aplicações; ii. Técnicas; iii. Objectivos; II. utilizadas
Teresa C. S. Azevedo Orientador: Prof. João Manuel R. S. Tavares Co-orientador: Prof. Mário A. P. Vaz Sumário: I. Reconstrução 3D do corpo humano: i. Aplicações; ii. Técnicas; iii. Objectivos; II. utilizadas
Dinâmica. Leis de Newton.notebook aula preenchida.notebook. July 10, 2017
 Dinâmica Foi estudado até agora a CINEMÁTICA, que é a parte da Física (Mecânica) que estuda o movimento dos corpos sem se preocupar com as causas. Estudaremos agora a Dinâmica que é a parte da Física que
Dinâmica Foi estudado até agora a CINEMÁTICA, que é a parte da Física (Mecânica) que estuda o movimento dos corpos sem se preocupar com as causas. Estudaremos agora a Dinâmica que é a parte da Física que
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785
 Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785") Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela 5.5 Torque e Momento Angular Relação entre torque (momento) da força resultante e momento
Mecânica I (FIS-14) Prof. Dr. Ronaldo Rodrigues Pelá Sala 2602A-1 Ramal 5785 rrpela@ita.br www.ief.ita.br/~rrpela 5.5 Torque e Momento Angular Relação entre torque (momento) da força resultante e momento
Robótica. Prof. Reinaldo Bianchi Centro Universitário FEI 2016
 Robótica Prof. Reinaldo Bianchi Centro Universitário FEI 2016 5 a Aula Pós Graduação - IECAT Objetivos desta aula Velocidade e Aceleração de corpo rígido. Matrizes de inércia. Bibliografia Capítulos 5
Robótica Prof. Reinaldo Bianchi Centro Universitário FEI 2016 5 a Aula Pós Graduação - IECAT Objetivos desta aula Velocidade e Aceleração de corpo rígido. Matrizes de inércia. Bibliografia Capítulos 5
Lista 9 : Dinâmica Rotacional
 Lista 9 : Dinâmica Rotacional NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Lista 9 : Dinâmica Rotacional NOME: Matrícula: Turma: Prof. : Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
USANDO O MODELLUS. Aula 3
 USANDO O MODELLUS Aula 3 A evolução temporal é dada pela solução numérica de equações diferenciais. Exemplo: Movimento Retilíneo Uniforme Exemplo: Movimento Retilíneo Uniformemente variado As derivadas
USANDO O MODELLUS Aula 3 A evolução temporal é dada pela solução numérica de equações diferenciais. Exemplo: Movimento Retilíneo Uniforme Exemplo: Movimento Retilíneo Uniformemente variado As derivadas
Fenômenos de Transporte I Mecânica dos Fluidos
 Fenômenos de Transporte I Mecânica dos Fluidos Escoamentos 1 O que é escoamento? Mudança de forma do fluido sob a ação de um esforço tangencial; Fluidez: capacidade de escoar, característica dos fluidos;
Fenômenos de Transporte I Mecânica dos Fluidos Escoamentos 1 O que é escoamento? Mudança de forma do fluido sob a ação de um esforço tangencial; Fluidez: capacidade de escoar, característica dos fluidos;
Aula 5 TECNOLOGIA EM JOGOS DIGITAIS PROGRAMACAO E INTEGRACAO DE JOGOS I. Marcelo Henrique dos Santos
 Aula 5 Mestrado em Educação (em andamento) Pós-graduação em Negócios em Mídias Digitais (em andamento) MBA em Marketing e Vendas Especialista em games : Produção e Programação Bacharel em Sistema de Informação
Aula 5 Mestrado em Educação (em andamento) Pós-graduação em Negócios em Mídias Digitais (em andamento) MBA em Marketing e Vendas Especialista em games : Produção e Programação Bacharel em Sistema de Informação
Computação Gráfica - 10
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 10 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 10 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
História da Ciência e da Tecnologia. Matheus kaique Hugo Yuri Joao Manoel Murilo Ribeiro
 História da Ciência e da Tecnologia Matheus kaique Hugo Yuri Joao Manoel Murilo Ribeiro Computação Gráfica A Computação Gráfica está presente em todas as áreas, desde os mais inconsequentes joguinhos eletrônicos
História da Ciência e da Tecnologia Matheus kaique Hugo Yuri Joao Manoel Murilo Ribeiro Computação Gráfica A Computação Gráfica está presente em todas as áreas, desde os mais inconsequentes joguinhos eletrônicos
Introdução à Computação Gráfica
 Computação Gráfica - Aula 1 (atualizada em 21/10/2015) glaucius@pelotas.ifsul.edu.br Introdução à Computação Gráfica Computação Gráfica Conceito É a área da Ciência da Computação que estuda a geração,
Computação Gráfica - Aula 1 (atualizada em 21/10/2015) glaucius@pelotas.ifsul.edu.br Introdução à Computação Gráfica Computação Gráfica Conceito É a área da Ciência da Computação que estuda a geração,
Introdução II - NATAL project
 Introdução II - NATAL project Processo de Animação Escaneamento 3D Nuvens de pontos: Modelos 3D em polígonos ou NURBS X-Men, Jurassic Park, Coração de X-Men, Jurassic Park, Coração de Dragão, Alien A Ressurreição
Introdução II - NATAL project Processo de Animação Escaneamento 3D Nuvens de pontos: Modelos 3D em polígonos ou NURBS X-Men, Jurassic Park, Coração de X-Men, Jurassic Park, Coração de Dragão, Alien A Ressurreição
ROBÓTICA PLANEJAMENTO DE TRAJETÓRIAS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial PLANEJAMENTO DE TRAJETÓRIAS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial PLANEJAMENTO DE TRAJETÓRIAS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: As condições que
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I EQUILÍBRIO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: As condições que
FQA Ficha 9 Exercícios variados
 ESCOLA SECUNDÁRIA DE CASQUILHOS FQA Ficha 9 Exercícios variados 11.º Ano Turma A e B 10 novembro 2014 NOME Nº Turma 1. Um grupo de alunos realizou a atividade de laboratório AL-1.4 - Satélite geostacionário
ESCOLA SECUNDÁRIA DE CASQUILHOS FQA Ficha 9 Exercícios variados 11.º Ano Turma A e B 10 novembro 2014 NOME Nº Turma 1. Um grupo de alunos realizou a atividade de laboratório AL-1.4 - Satélite geostacionário
Física Aplicada. Capítulo 03 Conceitos Básicos sobre Mecânica. Técnico em Edificações. Prof. Márcio T. de Castro 17/05/2017
 Física Aplicada Capítulo 03 Conceitos Básicos sobre Mecânica Técnico em Edificações 17/05/2017 Prof. Márcio T. de Castro Parte I 2 Mecânica Mecânica: ramo da física dedicado ao estudo do estado de repouso
Física Aplicada Capítulo 03 Conceitos Básicos sobre Mecânica Técnico em Edificações 17/05/2017 Prof. Márcio T. de Castro Parte I 2 Mecânica Mecânica: ramo da física dedicado ao estudo do estado de repouso
UNIVERSIDADE FEDERAL DA BAHIA INSTITUTO DE FÍSICA - DEPARTAMENTO DE FÍSICA GERAL DISCIPLINA: FIS FÍSICA GERAL E EXPERIMENTAL II-E
 UNIVERSIDADE FEDERAL DA BAHIA INSTITUTO DE FÍSICA - DEPARTAMENTO DE FÍSICA GERAL DISCIPLINA: FIS 122 - FÍSICA GERAL E EXPERIMENTAL II-E www.fis.ufba.br/~fis122 LISTA DE EXERCÍCIOS: OSCILAÇÕES 2014.1 01)
UNIVERSIDADE FEDERAL DA BAHIA INSTITUTO DE FÍSICA - DEPARTAMENTO DE FÍSICA GERAL DISCIPLINA: FIS 122 - FÍSICA GERAL E EXPERIMENTAL II-E www.fis.ufba.br/~fis122 LISTA DE EXERCÍCIOS: OSCILAÇÕES 2014.1 01)
Desenho Técnico e CAD CAD e Sistemas de Coordenadas. Computação Gráfica. Computação Gráfica
 Desenho Técnico e CAD CAD e Prof. Luiz Antonio do Nascimento Engenharia Ambiental 3º Semestre Computação Gráfica Ramo da computação dedicado à geração, tratamento, apresentação e armazenamento de imagens
Desenho Técnico e CAD CAD e Prof. Luiz Antonio do Nascimento Engenharia Ambiental 3º Semestre Computação Gráfica Ramo da computação dedicado à geração, tratamento, apresentação e armazenamento de imagens
Aplicações Informáticas B 12º Ano
 Aplicações Informáticas B 12º Ano Prof. Adelina Maia 2010/2011 AIB_U4C 1 TÉCNICAS DE ANIMAÇÃO EM COMPUTADOR A animação por computador pode ser definida como a produção do movimento de imagens utilizando
Aplicações Informáticas B 12º Ano Prof. Adelina Maia 2010/2011 AIB_U4C 1 TÉCNICAS DE ANIMAÇÃO EM COMPUTADOR A animação por computador pode ser definida como a produção do movimento de imagens utilizando
Halliday & Resnick Fundamentos de Física
 Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Mecânica Clássica Curso - Licenciatura em Física EAD. Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA
 Mecânica Clássica Curso - Licenciatura em Física EAD Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA Aula 1 : Cinemática da partícula Aula 1 : Cinemática da partícula Exemplos Um tubo metálico, retilíneo
Mecânica Clássica Curso - Licenciatura em Física EAD Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA Aula 1 : Cinemática da partícula Aula 1 : Cinemática da partícula Exemplos Um tubo metálico, retilíneo
3 a prova de F 128 Diurno 30/06/2014
 30/06/2014 Nome: RA: Turma: Esta prova contém 14 questões de múltipla escolha e 1 questão discursiva. Não esqueça de passar as respostas das questões de múltipla escolha para o cartão de respostas. Obs:
30/06/2014 Nome: RA: Turma: Esta prova contém 14 questões de múltipla escolha e 1 questão discursiva. Não esqueça de passar as respostas das questões de múltipla escolha para o cartão de respostas. Obs:
CONCURSO DE ADMISSÃO AO CURSO DE GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES
 CONCURSO DE ADMISSÃO AO CURSO DE GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 2012 1 a QUESTÃO Valor: 1,00 Numa região sujeita a um campo magnético de módulo B, conforme a figura acima, uma partícula carregada
CONCURSO DE ADMISSÃO AO CURSO DE GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 2012 1 a QUESTÃO Valor: 1,00 Numa região sujeita a um campo magnético de módulo B, conforme a figura acima, uma partícula carregada
Introdução Geral a Computação Gráfica. Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de Computação Gráfica
 Introdução Geral a Computação Gráfica Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de 2 Introdução Geral a O que é CG? Áreas de Atuação Definição, Arte e Matemática Mercado
Introdução Geral a Computação Gráfica Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de 2 Introdução Geral a O que é CG? Áreas de Atuação Definição, Arte e Matemática Mercado
d 2 h dt 2 = 9, 8 dh b) Para a altura inicial da massa h(0) = 200 metros e velocidade inicial v(0) = 9, 8m/s, onde v(t) = dh
 Para a altura inicial da massa h(0) = 200 metros e velocidade inicial v(0) = 9, 8m/s, onde v(t) = dh") TURMA 202: Modelagem Matemática PRA3 Prof. José A. Dávalos Chuquipoma Questão LER 04 LISTA DE EXERCÍCIOS RESOLVIDOS 04 Data para submissão na Plataforma Moodle: 22/09/204 Um objeto de massa m = se encontra
TURMA 202: Modelagem Matemática PRA3 Prof. José A. Dávalos Chuquipoma Questão LER 04 LISTA DE EXERCÍCIOS RESOLVIDOS 04 Data para submissão na Plataforma Moodle: 22/09/204 Um objeto de massa m = se encontra
Capítulo 11 Rotações e Momento Angular
 Capítulo 11 Rotações e Momento Angular Corpo Rígido Um corpo rígido é um corpo ideal indeformável de tal forma que a distância entre 2 pontos quaisquer do corpo não muda nunca. Um corpo rígido pode realizar
Capítulo 11 Rotações e Momento Angular Corpo Rígido Um corpo rígido é um corpo ideal indeformável de tal forma que a distância entre 2 pontos quaisquer do corpo não muda nunca. Um corpo rígido pode realizar
PROGRAD / COSEAC Padrão de Respostas Física Grupos 05 e 20
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
PROGRAD / COSEAC Padrão de Respostas Física Grupo 04
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR
 O que vamos estudar? CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR Seção 11.1 Cinemática do corpo rígido Seção 11.2 Representação vetorial das rotações Seção 11.3 Torque Seção 11.4 Momento angular Seção 11.5
O que vamos estudar? CAPÍTULO 11 ROTAÇÕES E MOMENTO ANGULAR Seção 11.1 Cinemática do corpo rígido Seção 11.2 Representação vetorial das rotações Seção 11.3 Torque Seção 11.4 Momento angular Seção 11.5
Figura 1.1: Partição do espaço contendo a esfera S.
 1 Introdução Uma superfície é definida implicitamente quando é descrita como um conjunto de pontos com uma propriedade em comum. A formulação mais utilizada é, dada uma função F : R 3! R, descrevê-la como
1 Introdução Uma superfície é definida implicitamente quando é descrita como um conjunto de pontos com uma propriedade em comum. A formulação mais utilizada é, dada uma função F : R 3! R, descrevê-la como
FIS 26. Mecânica II *****
 * ** FIS 26 Mecânica II *** * https://def.fe.up.pt/dinamica/movimento_curvilineo.html ** http://www.met.reading.ac.uk/pplato2/h-flap/phys5_3.html *** http://www.esquerda.net/artigo/como-explicar-ondas-gravitacionais-tua-avo/41226
* ** FIS 26 Mecânica II *** * https://def.fe.up.pt/dinamica/movimento_curvilineo.html ** http://www.met.reading.ac.uk/pplato2/h-flap/phys5_3.html *** http://www.esquerda.net/artigo/como-explicar-ondas-gravitacionais-tua-avo/41226
Enquadramento e Conceitos Fundamentais
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Enquadramento e Conceitos Fundamentais Edward Angel, Cap. 1 LEIC CG Enquadramento e Conceitos Fundamentais Introdução à Computação
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Enquadramento e Conceitos Fundamentais Edward Angel, Cap. 1 LEIC CG Enquadramento e Conceitos Fundamentais Introdução à Computação
Lista de exercícios 4
 4. O sistema da figura a seguir é composto por uma barra homogênea AB, onde está articulada em A e pesa 00 N. O objeto P pesa 50 N para que esse sistema permaneça estático. Analise os seguintes itens:
4. O sistema da figura a seguir é composto por uma barra homogênea AB, onde está articulada em A e pesa 00 N. O objeto P pesa 50 N para que esse sistema permaneça estático. Analise os seguintes itens: