ROBÓTICA (ROB74) AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug
|
|
|
- Lúcia Alcântara Dias
- 7 Há anos
- Visualizações:
Transcrição
1 ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug
2 PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle: Geração/Planejamento de Trajetórias Programação de Robôs Industriais Projeto
3 O que é Robótica? Contexto Geral
4 O que é Robótica? Contexto Geral
5 O que é Robótica? Contexto Geral
6 O que é Robótica? Contexto Geral
7 O que é Robótica? Contexto Geral
8 Máquinas que... Realizam tarefas que envolvem movimentos: maior mobilidade e habilidade que máquinas tradicionais; São comandadas por computador São programáveis Possuem comunicação com o meio (tato, visão, proximidade) Têm capacidade de autoprogramação
9 Máquinas que...

10 Estrutura de Máquinas
11 Origens Manipulação remota Dispositivos de manipulação de materiais (George Devol, 1954, Unimation) Duas tecnologias antecessoras: comando numérico e manipulação remota
12 Robótica Industrial Estrutura geral de um sistema robótico Tarefa (referência de posição, força, trajetórias) Controle e Supervisão Acionamento Mecânico Sensores
13 Componentes
14 Tipos de Juntas
15 Exemplo SCARA 3 juntas de rotação 1 junta de translação 4 graus de liberdade Obs: muitas vezes Número de Juntas Graus de Liberdade
16 Estrutura da Cadeia Cinemática Cadeia Cinemática Aberta (Robôs Seriais)
17 Estrutura da Cadeia Cinemática Cadeia Cinemática Fechada (Robôs Paralelos)
18 Envelope de Trabalho Envelope/Volume de trabalho é o espaço em que o robô pode manipular a extremidade de seu punho; Configurações Seriais: Cartesiano (PPP) Cilíndrico (RPP) Esférico (RRP) Scara (RRP) Vertical Articulado (RRR)
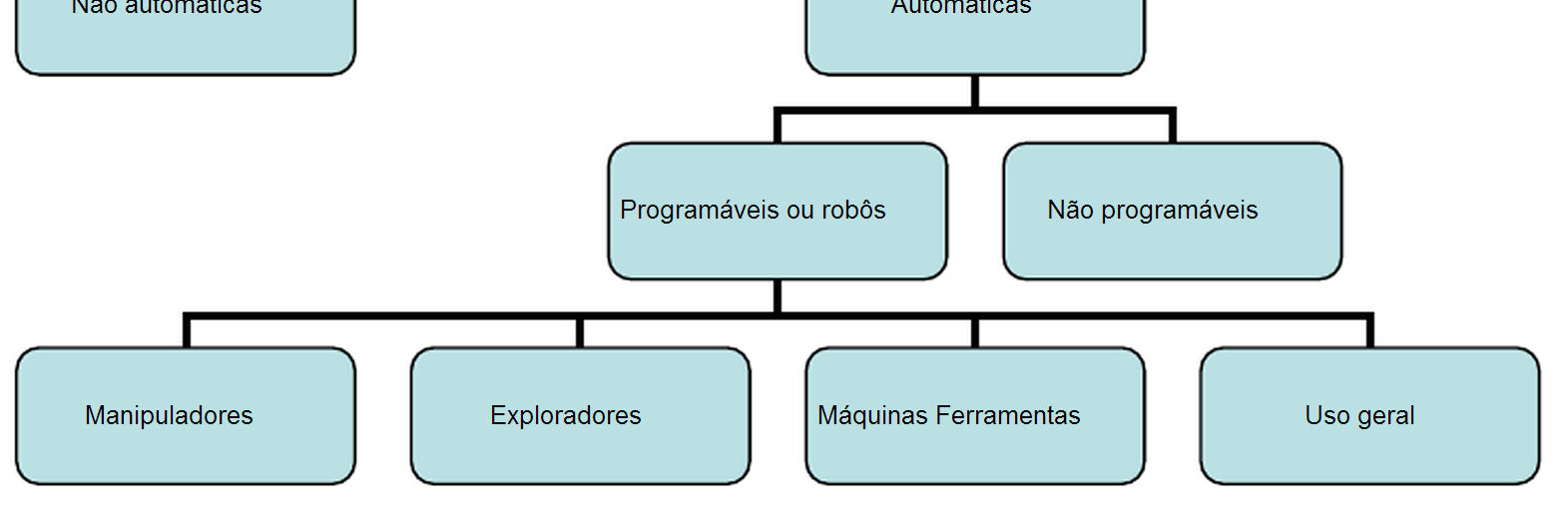
19 Classificação dos Robôs
20 Cartesiano (XYZ) Configurações Seriais
21 Cartesiano Configurações Seriais
22 Cilíndrico Configurações Seriais
23 Cilíndrico Configurações Seriais
24 Cilíndrico Configurações Seriais
25 Esférico (Polar) Configurações Seriais
26 Esférico (Polar) Configurações Seriais
27 Esférico (Polar) Configurações Seriais
28 Scara Configurações Seriais
29 Configurações Seriais Vertical Articulado
30 Configurações Seriais Vertical Articulado
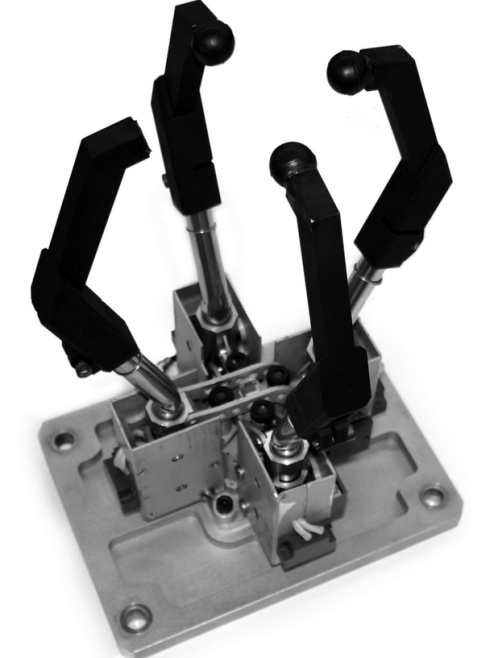
31 Delta (3 GdL) Configurações Paralelas
32 Configurações Paralelas Tricept (3 GdL)
33 Configurações Paralelas Orthoglide (3 GdL)
34 Configurações Paralelas Quattro (4 GdL)
35 Configurações Paralelas Plataforma de Stewart (6 GdL)
36 Comparação ET Admite-se: juntas rotacionais varrem 360 graus e juntas prismáticas são todas iguais e deslocam o comprimento L;
37 Seriais X Paralelos NÍVEL MECANISMO CONTROLE CARACTERÍSTICAS MANIPULADOR MANIPULADOR SERIAL PARALELO Inércia Grande Pequena * Volume de Trabalho Grande * Pequeno Aparência Antropomórfica Base Estrutural Fabricação Difícil Fácil * Controle de posição no espaço de trabalho Difícil Fácil * Controle de força no espaço de trabalho Fácil * Difícil Detecção de Forças Difícil Fácil * Erro de Posição Acumulado Média * Erro de controle de Forças Perto de Pontos Singulares Média * Degeneração no controle de força Grande movimento do atuador Dinâmica Complicada * Acumulado Diminuição de exatidão no posicionamento Grande força no atuador Muito mais complicada
38 GdL X GdM Graus de Liberdade (GdL) movimentos independentes Graus de Movimento (GdM)
39 GdL X GdM OBS: Geram uma outra classificação de Robôs.
40 Classificação Segundo GdL s Robôs de Propósito Geral (6 GdL): conseguem atingir qualquer posição e orientação no espaço de trabalho. Robôs Redundantes (GdM > GdL): quando possuem articulações adicionais, utilizados para alcançar locais de difícil acesso contornando obstáculos (ou robôs com trilhos). Robôs Limitados (< 6 GdL): movimentação limitada.
41 Sistemas com 1 eixo GdL X GdM
42 GdL X GdM Sistemas com 2 eixos Sistemas com 3 eixos
43 Aplicações Manipulação de materiais: não há transformação dos objetos: *Palletização; *Carregamento Fabricação: *Preparação de máquinas * Empacotamento *Soldagem *Colagem e selamento *Corte (laser, jato) * Pintura *Montagem (mec. e elet.) *Acabamento Inspeção e medição: *Qualidade
44 Aplicações Motivações para aplicação na indústria Tarefas repetitivas e em ambientes insalubres Precisão Qualidade Rapidez Marketing Redução de custos
45 Aplicações - Paralelo Simuladores de vôo e de automóveis; Montagem de placas de circuito impresso; Processo de fresagem de alta velocidade; OBS: como a força é distribuída entre diversos elos paralelos e só há um estágio de elos antes do efetuador, o peso do robô e seu momento de inércia são reduzidos, possibilitando a realização de tarefas precisas em alta velocidade.

46 Exemplos: Ferramentas
47 Exemplos: Ferramentas
48 Exemplos: Ferramentas
49 Exemplos: Ferramentas

50 Estatísticas

51 Estatísticas Citação IFR (International Federation of Robotics)

52 Estatísticas
53 Estatísticas
54 Estatísticas
55 Mercado no Brasil Maiores consumidores: Setor automobilístico (montadoras e fornecedores de autopeças): ~65% Médias e pequenas empresas: ~18%
56 Robótica TEMAS ATUAIS: Controle de Força; Cooperação; Programação; Projeto de robôs.
57 Cinemática Direta: Espaço das juntas q=[q1 q2... qn] Espaço operacional x=[px py pz α θ γ]
58 Cinemática Inversa: Espaço operacional x=[px py pz α θ γ] Espaço das juntas q=[q1 q2... qn]
59 Cinemática Trajetórias ponto-a-ponto Contínuas - path motion

60 Cinemática Diferencial Relacionar velocidades das juntas e do efetuador; Matriz Jacobiana:
61 Programação Caixa de Comando (teach/flex - pendant)
62 Programação Linguagens de Programação: VAL II (Unimation) AML (IBM) PDL-2 (Comau) RAPID (ABB) ACL (Eshed) Exemplo: MOVL P1 MOVC P2,P3,P4 WAIT S2
1 ESCOLA POLITÉCNICA DA USP Aspectos Gerais Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
Grande precisão (posicionamento do atuador final); Carga inercial (momento) fixa, ao longo da área de trabalho;
; Carga inercial (momento) fixa, ao longo da área de trabalho;") Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Disciplina: Robótica Aula 02: Conceitos Básicos
 Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
Elementos de Robótica
 Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Manufatura assistida por computador
 Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Até 0.003 mm (0.1mm usualmente) Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40
 Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40") Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Controle de Robôs Manipuladores. Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
") Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Estrutura e características gerais dos robôs. - Configuração básica de um robô - Articulações - Movimento e precisão
 Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Classificação. Classificação. Classificação. Classificação. Classificação. Introdução à Robótica Manipuladores e Robótica Móvel (classificação)
") Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Classificação. Classificação. Classificação. Classificação. Classificação 03/23/2016
 Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Robótica Industrial. Professor: José Alberto Naves Cocota Júnior. UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30
 Turmas: EE8P30 e EE9P30") Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 3 Introdução à Robótica Industrial (cont.) Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 3 Introdução à Robótica Industrial (cont.) Prof. Felipe Kühne Bibliografia:
Walter Fetter Lages. Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A.
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Paulo Roberto Chiarolanza Vilela 1
 Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas.
 4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Introdução. Walter Fetter Lages
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
COMPONENTES DE UM SISTEMA ROBÓTICO
 COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
Robótica. Executores. Prof. Oswaldo Flório Filho Profª. Alice Flora Madeira Ribeiro Flório Prof. Wagner Toscano
 Executores Conteúdo 1 Executores... 3 1.1 Espaço de trabalho... 6 1.2 Graus de Liberdade... 6 2 Tipos básicos de manipuladores... 8 2.1 Braço Mecânico Articulado... 8 2.2 Classificação dos robôs manipuladores
Executores Conteúdo 1 Executores... 3 1.1 Espaço de trabalho... 6 1.2 Graus de Liberdade... 6 2 Tipos básicos de manipuladores... 8 2.1 Braço Mecânico Articulado... 8 2.2 Classificação dos robôs manipuladores
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1
 MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Tópicos em Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Tópicos em Robótica Industrial Prof. Felipe Kühne Bibliografia:
ROBÓTICA CINEMÁTICA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Introdução Robôs Industriais
 ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
Unidade 1 Introdução. 1.1 Robôs industriais
 Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
LISTA DE EXERCÍCIOS 01
 LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
Introdução à Robótica Industrial p. 1/23
 Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 4 Introdução à Robótica Industrial p. 1/23 Cinemática Direta Dado: variáveis das juntas (ângulos ou deslocamentos) Procurado: posição e orientação
Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 4 Introdução à Robótica Industrial p. 1/23 Cinemática Direta Dado: variáveis das juntas (ângulos ou deslocamentos) Procurado: posição e orientação
Sistemas para Automação e Robótica (parte 02)
") Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Aplicações da Robótica Industrial Prof. Felipe Kühne
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Aplicações da Robótica Industrial Prof. Felipe Kühne
ASPECTOS CONSTRUTIVOS DE ROBÔS
 ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÓTICA (ROB74) AULA 6. PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug
 AULA 6. PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 6 PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug PROGRAMA INTRODUÇÃO AO PLANEJAMENTO DE TRAJETÓRIAS Tipos de Movimento Planejamento nas Juntas Com pontos Intermediários Planejamento
ROBÓTICA (ROB74) AULA 6 PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug PROGRAMA INTRODUÇÃO AO PLANEJAMENTO DE TRAJETÓRIAS Tipos de Movimento Planejamento nas Juntas Com pontos Intermediários Planejamento
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
ROBÓTICA. Equacionamento da Cinemática Direta de Robôs
 ROBÓTICA Equacionamento da Cinemática Direta de Robôs Prof. Dr. Carlo Pece Depto. de Eletrotécnica UTFPR Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos UTFPR 1 Cinemática
ROBÓTICA Equacionamento da Cinemática Direta de Robôs Prof. Dr. Carlo Pece Depto. de Eletrotécnica UTFPR Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos UTFPR 1 Cinemática
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
AUTOMAÇÃO ROBOTIZADA
 AUTOMAÇÃO INDUSTRIAL PARTE 3 AUTOMAÇÃO ROBOTIZADA Nestor Agostini sibratec@sibratec.ind.br Rio do Sul (SC), 12 de março de 2014 1/18 1. DEFINIÇÃO DE ROBÔ A definição de robôs é, e talvez permanecerá, objeto
AUTOMAÇÃO INDUSTRIAL PARTE 3 AUTOMAÇÃO ROBOTIZADA Nestor Agostini sibratec@sibratec.ind.br Rio do Sul (SC), 12 de março de 2014 1/18 1. DEFINIÇÃO DE ROBÔ A definição de robôs é, e talvez permanecerá, objeto
ROBÓTICA SISTEMAS DE REFERÊNCIA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial SISTEMAS DE REFERÊNCIA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial SISTEMAS DE REFERÊNCIA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são apresentados
 35 3 Análise topológica do mecanismo A geração da topologia deste mecanismo tem como objetivo obter uma arquitetura para viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são
35 3 Análise topológica do mecanismo A geração da topologia deste mecanismo tem como objetivo obter uma arquitetura para viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são
ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto
 ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto Robótica Industrial MIEEC FEUP (8MAR2011) Pag. 1 FORMAÇÃO DA 1ª
ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto Robótica Industrial MIEEC FEUP (8MAR2011) Pag. 1 FORMAÇÃO DA 1ª
1 ESCOLA POLITÉCNICA DA USP Estrutura Mecânica Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
BRAÇO MECÂNICO 2.1. Introdução
 BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
MANIPULADORES ROBÓTICOS INDUSTRIAIS
 MANIPULADORES ROBÓTICOS INDUSTRIAIS Paulo Victor Galvão Simplício 1 Beatriz Rêgo Lima 2 Janaína Accordi Junkes 3 Engenharia Mecatrônica ciências exatas e tecnológicas ISSN IMPRESSO 1980-1777 ISSN ELETRÔNICO
MANIPULADORES ROBÓTICOS INDUSTRIAIS Paulo Victor Galvão Simplício 1 Beatriz Rêgo Lima 2 Janaína Accordi Junkes 3 Engenharia Mecatrônica ciências exatas e tecnológicas ISSN IMPRESSO 1980-1777 ISSN ELETRÔNICO
1) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
 Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:") 1) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda: 2 o motor Posição desejada da junta = 45 o Avalia o sinal de entrada e envia um sinal ao atuador ENCODER 43 o
1) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda: 2 o motor Posição desejada da junta = 45 o Avalia o sinal de entrada e envia um sinal ao atuador ENCODER 43 o
Sistemas para Automação e
 Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA FERNANDO MALVEZZI. Avaliação do comportamento cinemático de um mecanismo. paralelo tridimensional
 UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA FERNANDO MALVEZZI Avaliação do comportamento cinemático de um mecanismo paralelo tridimensional São Paulo 2006 FERNANDO MALVEZZI Avaliação do comportamento
UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA FERNANDO MALVEZZI Avaliação do comportamento cinemático de um mecanismo paralelo tridimensional São Paulo 2006 FERNANDO MALVEZZI Avaliação do comportamento
Capítulo 1 INTRODUÇÃO
 1. Introdução 1 Capítulo 1 INTRODUÇÃO Este livro focaliza a mecânica, o controle e os sensores da forma mais importante dos robôs industriais, o braço robótico ou manipulador. O que exatamente constitui
1. Introdução 1 Capítulo 1 INTRODUÇÃO Este livro focaliza a mecânica, o controle e os sensores da forma mais importante dos robôs industriais, o braço robótico ou manipulador. O que exatamente constitui
Manufatura assistida por Computador
 Manufatura assistida por Computador Cinemática Direta em Manipuladores Robóticos for MATLAB Professor Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica 2013/01 Álgebra linear
Manufatura assistida por Computador Cinemática Direta em Manipuladores Robóticos for MATLAB Professor Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica 2013/01 Álgebra linear
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Leonardo Bortolon Maraschin 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional
DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Leonardo Bortolon Maraschin 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional
SEM Controle de Sistemas Robóticos
 SEM5875 - Controle de Sistemas Robóticos Adriano A. G. Siqueira Aula 1 - Revisão de Cinemática, Dinâmica e Propriedades das Matrizes Dinâmicas SEM5875 - Controle de Sistemas Robóticos p. 1/61 Matrizes
SEM5875 - Controle de Sistemas Robóticos Adriano A. G. Siqueira Aula 1 - Revisão de Cinemática, Dinâmica e Propriedades das Matrizes Dinâmicas SEM5875 - Controle de Sistemas Robóticos p. 1/61 Matrizes
ROBÓTICA CONCEITOS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CONCEITOS Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://giovanatangerino.wordpress.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CONCEITOS Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://giovanatangerino.wordpress.com
Robôs Industriais conceitos, classificação, aplicação e programação
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
Introdução à Robótica Industrial p. 1/25
 Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 5 Introdução à Robótica Industrial p. 1/25 Espaço das juntas e Espaço das posições e orientações Espaço das juntas: q = q 1 q 2. { q i = θ i,
Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 5 Introdução à Robótica Industrial p. 1/25 Espaço das juntas e Espaço das posições e orientações Espaço das juntas: q = q 1 q 2. { q i = θ i,
Moussa Salem Simhon Engenheiro Industrial Mecânico FEI -PUC 1967 SP anos de Experiência em chão de fábrica
 1 Ética Profissional Como todas as profissões, a engenharia exige procedimento ético, conforme previsto no Código de Ética Profissional do Engenheiro, do Arquiteto e do Engenheiro Agrônomo. Estes procedimentos
1 Ética Profissional Como todas as profissões, a engenharia exige procedimento ético, conforme previsto no Código de Ética Profissional do Engenheiro, do Arquiteto e do Engenheiro Agrônomo. Estes procedimentos
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2014 Ensino Técnico ETEC PAULINO BOTELHO Código: 091 Município: SÃO CARLOS Eixo Tecnológico: CONTROLE E PROCESSOS INDUSTRIAIS Habilitação Profissional: TÉCNICO EM MECATRÔNICA
Plano de Trabalho Docente 2014 Ensino Técnico ETEC PAULINO BOTELHO Código: 091 Município: SÃO CARLOS Eixo Tecnológico: CONTROLE E PROCESSOS INDUSTRIAIS Habilitação Profissional: TÉCNICO EM MECATRÔNICA
CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG
 Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
Dinâmica das Máquinas
 Dinâmica das Máquinas Conceito de grau de liberdade Visão geral do processo de análise de mecanismos Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Dinâmica das Máquinas Conceito de grau de liberdade Visão geral do processo de análise de mecanismos Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
ROBÓTICA DENAVIT- HARTENBERG. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Robótica. Índice. Cap. 1 Introdução. Cap. 2 Automação da produção História da robótica Automação
 3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
Funções para a Cinemática de Robôs
 Funções para a Cinemática de Robôs 19 de novembro de 2010 1 Tarefa funções Construir as no Scilab as seguintes funções: 1. Rot_x(theta) Recebe um ângulo θ e entrega a matriz de rotação x para o giro de
Funções para a Cinemática de Robôs 19 de novembro de 2010 1 Tarefa funções Construir as no Scilab as seguintes funções: 1. Rot_x(theta) Recebe um ângulo θ e entrega a matriz de rotação x para o giro de
DEFINIÇÃO DE ROBÔ INDUSTRIAL
 DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
GERENCIAMENTO DE PROJETOS - 20h - EaD
 GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
ROBÓTICA BRAÇO ROBÓTICO. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial BRAÇO ROBÓTICO https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial BRAÇO ROBÓTICO https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Curso Lato Sensu Projeto Mecatrônico UFRJ
 Curso Lato Sensu Projeto Mecatrônico UFRJ 1. INTRODUÇÃO 1.1. A Utilização de Máquinas MÓDULO ROBÓTICA Vitor Ferreira Romano Desde os primórdios de sua origem, o ser humano sempre se utilizou de ferramentas
Curso Lato Sensu Projeto Mecatrônico UFRJ 1. INTRODUÇÃO 1.1. A Utilização de Máquinas MÓDULO ROBÓTICA Vitor Ferreira Romano Desde os primórdios de sua origem, o ser humano sempre se utilizou de ferramentas
Cinemática (warmup) Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT") Cinemática (warmup) Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 10/03/2019 Sumário Introdução Descrições espaciais Mapeamentos Transformações homogêneas
Cinemática (warmup) Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 10/03/2019 Sumário Introdução Descrições espaciais Mapeamentos Transformações homogêneas
Natureza - OBRIGTEÓRICA
 1 de 5 01 CON101 - Algorítmos e Programação - Ativa desde: CON102 - Cálculo I - Ativa desde: 16/11/2007 CON103 - Comunicação e Produção Técnico-Científica - Ativa desde: 16/11/2007 CON104 - Expressão Gráfica
1 de 5 01 CON101 - Algorítmos e Programação - Ativa desde: CON102 - Cálculo I - Ativa desde: 16/11/2007 CON103 - Comunicação e Produção Técnico-Científica - Ativa desde: 16/11/2007 CON104 - Expressão Gráfica
1 ESCOLA POLITÉCNICA DA USP Introdução Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
Sistemas Mecatrônicos 1
 Sistemas Mecatrônicos 1 Módulo 5 Elementos mecânicos de sistemas mecatrônicos Prof. Leonardo Marquez Pedro Os elementos mecânicos são utilizados na construção da cadeia cinemática dos diferentes tipos
Sistemas Mecatrônicos 1 Módulo 5 Elementos mecânicos de sistemas mecatrônicos Prof. Leonardo Marquez Pedro Os elementos mecânicos são utilizados na construção da cadeia cinemática dos diferentes tipos
Robótica. Linguagens de Programação para Robótica (manipuladores)
") Linguagens de Programação para (manipuladores) -Orientados para o Robô -Tarefa descrita como sequência de movimentos -Ex: VAL (Puma), AL (IBM) -Orientada para as Tarefas (ou para os Objectos) -Descrição
Linguagens de Programação para (manipuladores) -Orientados para o Robô -Tarefa descrita como sequência de movimentos -Ex: VAL (Puma), AL (IBM) -Orientada para as Tarefas (ou para os Objectos) -Descrição
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec: Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e
Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec: Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec: Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e
Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec: Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e
ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES
 ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES VERBOSKI, José Luiz Estudante de Engenharia Elétrica: UTFPR Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR
ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES VERBOSKI, José Luiz Estudante de Engenharia Elétrica: UTFPR Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ. DCEEng - Departamento de Ciências Exatas e Engenharias
 0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
MECATRÔNICA COMO OBJETO DE INTERAÇÃO ENTRE O CURSO DE ENGENHARIA MECÂNICA E O MESTRADO/DOUTORADO EM MODELAGEM MATEMÁTICA 1
 MECATRÔNICA COMO OBJETO DE INTERAÇÃO ENTRE O CURSO DE ENGENHARIA MECÂNICA E O MESTRADO/DOUTORADO EM MODELAGEM MATEMÁTICA 1 Mônica Raquel Alves 2, Djonathan Ritter 3, Vânia Luisa Behnen 4, Roberta Goergen
MECATRÔNICA COMO OBJETO DE INTERAÇÃO ENTRE O CURSO DE ENGENHARIA MECÂNICA E O MESTRADO/DOUTORADO EM MODELAGEM MATEMÁTICA 1 Mônica Raquel Alves 2, Djonathan Ritter 3, Vânia Luisa Behnen 4, Roberta Goergen
ROBÓTICA INDUSTRIAL. Engenharia Elétrica
 ROBÓTICA INDUSTRIAL Prof Daniel Hasse Engenharia Elétrica SÃO JOSÉ DOS CAMPOS, SP Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia
ROBÓTICA INDUSTRIAL Prof Daniel Hasse Engenharia Elétrica SÃO JOSÉ DOS CAMPOS, SP Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia
Quando utilizamos os robôs?
 Quando utilizamos os robôs? Os primeiros robôs industriais começaram a ser comercializados e utilizados com o objetivo de se substituir o ser humano em tarefas em que ele, o ser humano, não poderia realizar,
Quando utilizamos os robôs? Os primeiros robôs industriais começaram a ser comercializados e utilizados com o objetivo de se substituir o ser humano em tarefas em que ele, o ser humano, não poderia realizar,
Planejamento de Trajetórias de Soldagem para Robôs Redundantes Operando em Ambientes Confinados
 Planejamento de Trajetórias de para Operando em Ambientes Confinados Simas Laboratório de Robótica Departamento de Automação e Sistemas - DAS Departamento de Engenharia Mecânica - EMC Universidade Federal
Planejamento de Trajetórias de para Operando em Ambientes Confinados Simas Laboratório de Robótica Departamento de Automação e Sistemas - DAS Departamento de Engenharia Mecânica - EMC Universidade Federal
MATRIZ CURRICULAR Curso: Engenharia Mecânica / Ano de Implantação: Carga Horária Total: 5598 Horas Relógio: 4576,5
 1º PERÍODO MATRIZ CURRICULAR Curso: Mecânica / Ano de Implantação: 2012.1 Carga Horária Total: 5598 Horas Relógio: 4576,5 B 6 108 81 Sem pré-requisito B Cálculo Vetorial e Geometria Analítica 4 72 54 Sem
1º PERÍODO MATRIZ CURRICULAR Curso: Mecânica / Ano de Implantação: 2012.1 Carga Horária Total: 5598 Horas Relógio: 4576,5 B 6 108 81 Sem pré-requisito B Cálculo Vetorial e Geometria Analítica 4 72 54 Sem
equipamentos que pudessem substituí-lo durante a realização de determinadas tarefas. Seguindo
 5 2 Revisão Bibliográfica O desenvolvimento da robótica ocorreu em função da busca pelo homem em construir equipamentos que pudessem substituí-lo durante a realização de determinadas tarefas. Seguindo
5 2 Revisão Bibliográfica O desenvolvimento da robótica ocorreu em função da busca pelo homem em construir equipamentos que pudessem substituí-lo durante a realização de determinadas tarefas. Seguindo
ESTUDO DE MÉTODOS PARA A SOLUÇÃO DA CINEMÁTICA INVERSA DE ROBÔS INDUSTRIAIS PARA IMPLEMENTAÇÃO COMPUTACIONAL
 UNIVERSIDADE FEDERAL DE SANTA CATARINA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA ESTUDO DE MÉTODOS PARA A SOLUÇÃO DA CINEMÁTICA INVERSA DE ROBÔS INDUSTRIAIS PARA IMPLEMENTAÇÃO COMPUTACIONAL DISSERTAÇÃO
UNIVERSIDADE FEDERAL DE SANTA CATARINA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA ESTUDO DE MÉTODOS PARA A SOLUÇÃO DA CINEMÁTICA INVERSA DE ROBÔS INDUSTRIAIS PARA IMPLEMENTAÇÃO COMPUTACIONAL DISSERTAÇÃO
1ª ETAPA - TURMA D e K
 CÁLCULO DIFERENCIAL E INTEGRAL I PF 3 CIÊNCIAS DO AMBIENTE PF 3 ÉTICA E CIDADANIA I PF 3 FÍSICA GERAL I PF 3 GEOMETRIA ANALÍTICA E VETORES PF 3 FÍSICA EXPERIMENTAL I COMPUTAÇÃO, ALGORITMOS E PROGRAMAÇÃO
CÁLCULO DIFERENCIAL E INTEGRAL I PF 3 CIÊNCIAS DO AMBIENTE PF 3 ÉTICA E CIDADANIA I PF 3 FÍSICA GERAL I PF 3 GEOMETRIA ANALÍTICA E VETORES PF 3 FÍSICA EXPERIMENTAL I COMPUTAÇÃO, ALGORITMOS E PROGRAMAÇÃO
REFERÊNCIAS TECNOLÓGICAS E CÁLCULO DIMENSIONAL
 Necessidade de Referências ponto, linha ou superfície a precisão de uma superfície não relaciona-se diretamente ao conceito de referências. a precisão de posicionamento sim. As referências podem ser classificadas
Necessidade de Referências ponto, linha ou superfície a precisão de uma superfície não relaciona-se diretamente ao conceito de referências. a precisão de posicionamento sim. As referências podem ser classificadas
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
1ª ETAPA - TURMA D e K
 CÁLCULO DIFERENCIAL E INTEGRAL I PAIE 3 CIÊNCIAS DO AMBIENTE PAIE 3 ÉTICA E CIDADANIA I PAIE 3 FÍSICA GERAL I PAIE 3 GEOMETRIA ANALÍTICA E VETORES PAIE 3 FÍSICA EXPERIMENTAL I PAIE 3 COMPUTAÇÃO, ALGORITMOS
CÁLCULO DIFERENCIAL E INTEGRAL I PAIE 3 CIÊNCIAS DO AMBIENTE PAIE 3 ÉTICA E CIDADANIA I PAIE 3 FÍSICA GERAL I PAIE 3 GEOMETRIA ANALÍTICA E VETORES PAIE 3 FÍSICA EXPERIMENTAL I PAIE 3 COMPUTAÇÃO, ALGORITMOS