Controle de Robôs Manipuladores. Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
|
|
|
- Maria dos Santos Brandt Melgaço
- 6 Há anos
- Visualizações:
Transcrição
1 Controle de Robôs Manipuladores Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
2 Introdução


3 Robôs Manipuladores O que são robôs manipuladores?

4 Robôs Manipuladores Industriais - Carga e descarga - Fundição de moldes - Solda - Pintura com spray - Montagem

5 DaVinci

6 Robôs Manipuladores de Serviço Medicina: DaVinci

7 Robôs Humanóides Asimo - Honda

8 HPR-2 HPR-3 Robôs Humanóides


9 Robôs Pessoais PR2 Personal Robot 2 (Willow Garage)

10 Robôs Pessoais
11 Componentes de um Robô Manipulador
 -")

12 Componentes Manipulador (corpo) - Elos e Juntas Efetuadores Atuadores Sensores Controlador
13 Controle de Robôs Manipuladores
14
15
16
17 Programa do Curso
18 Descrições Espaciais e Transformações {B} {T} {C}
19 Cinemática Direta Ferramenta Base Determinar a posição do efetuador dado a posição (ângulos) das juntas
20 Cinemática Inversa Ferramenta Base Dada a posição do efetuador, determinar as posições (ângulos) das juntas
21 Velocidades Velocidades lineares e angulares de cada elo e do efetuador
22 Jacobiano Matriz que relaciona as velocidades das juntas com a velocidade do efetuador
23 Dinâmica Estudo da relação entre as forças (e torques) e o movimento causado no robô
24 Geração de Trajetórias
25 Controle
26 Bibliografia John J. Craig, Introduction to Robotics: Mechanics and Control, 3ª edição, Prentice Hall Spong, Vidyasagar, Hutchinson, Robot Dynamics and Control, John Wiley & Sons L. Sciavicco, B. Siciliano, Modeling and Control of Robot Manipulators, 2ª edição, Springler P. Corke; "Robotics, Vision and Control: Fundamental Algorithms in Matlab", Springler, 2013.
27 Robôs Manipuladores


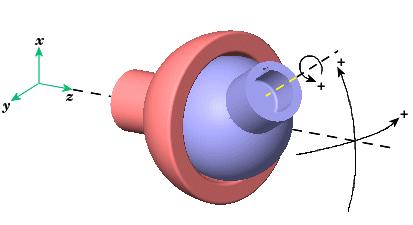
28 Juntas Prismática Rotação MathWorks - SimMechanics


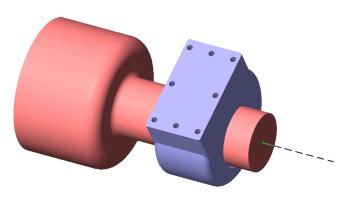
29 Juntas Parafuso Esférica Cilíndrica Planar MathWorks - SimMechanics


30 Juntas Universal Gimbal MathWorks - SimMechanics
31 Efetuadores Paralelo Tesoura Vertical Mão desenvolvida pela Barret Technologies


32 Mão desenvolvida pela Barret Technologies Efetuadores
33 Classificação: Fonte de Energia Elétrica (motores CC/CA) - Mais baratos, limpos, e silenciosos Hidráulica - Capacidade de carga maior - Cuidado na manutenção: vazamento Pneumática - Baratos, simples, mas não podem ser controlados de forma precisa
34 Configuração Cinemática Robôs com Elos em Série - Cartesiano (PPP) - Cilíndrico (RPP) - Esférico (RRP) - SCARA (RRP) - Articulado (RRR) Robôs Paralelos (estrutura fechada)

35 Cartesiano PPP ou 3P Robô cartesiano da Epson
36
 Seiko")
37 Cilíndrico RPP ou R2P (cilíndrico) Seiko RT3300

38 Esférico RRP ou 2RP Braço de Stanford
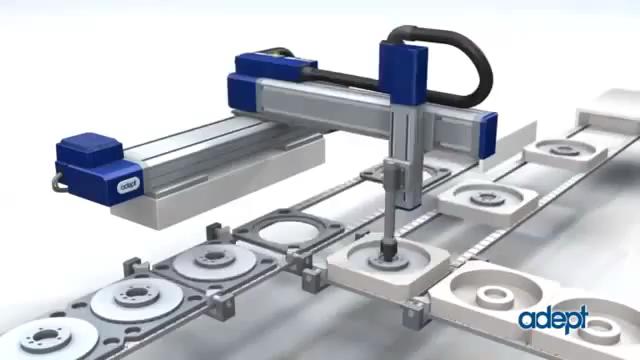
39 SCARA SCARA: Selective Compliant Articulated Robot for Assembly RRP ou 2RP (SCARA) Adept Cobra Smart600

40
41 Articulado Ombro Cotovelo Antebraço Corpo Base RRR ou 3R ABB IRB1400
42 Punho Orientação do Efetuador Yaw Centro do Punho Roll Pitch

43
44 Espaço de Trabalho Porção do ambiente que o efetuador do manipulador consegue acessar - Espaço de trabalho alcançável: o conjunto desses pontos. - Espaço de trabalho destro: subconjunto onde o efetuador pode acessar com qualquer orientação.
45 Espaço de Trabalho

46 Espaço de Trabalho Cartesiano
47 Espaço de Trabalho Cartesiano

48 Espaço de Trabalho Cilíndrico
49 Espaço de Trabalho Cilíndrico

50 Espaço de Trabalho Esférico
51 Espaço de Trabalho Esférico

52 Espaço de Trabalho SCARA
53 Espaço de Trabalho SCARA

54 Espaço de Trabalho Articulado
55 Espaço de Trabalho Articulado


56 Robôs Paralelos Adept Quattro GmBH NomaPod

57 Estrutura Fechada ABB IRB9400 ABB IRB6400

58
59 Conceitos Graus de Liberdade Redundância Espaço de Trabalho Espaço de Configuração Repetibilidade Acurácia Resolução
60 Graus de Liberdade Número de variáveis de posição independentes que precisam ser especificadas para localizar todas as partes do mecanismo. (Craig) Número mínimo de parâmetros necessários para especificar a configuração de um robô. (spong) Quantos graus de liberdade? - Braço humano - Four-bar linkage
61 Four-bar Linkage
62 Four-bar Linkage
63 Configuração Conjunto de variáveis que permite a especificação completa da posição de cada ponto do manipulador. Espaço de configuração: conjunto de todas as configurações. Para manipuladores de cadeia aberta: posição de cada junta, que é igual ao número de graus de liberdade.
64 Redundância Quando o número de graus de liberdade de um mecanismo é inferior ao de mobilidade. Exemplo: Para uma tarefa no espaço cartesiano 3D, é necessário pelo menos 6 graus de liberdade. Um robô com mais de 6 graus é redundante.
65 Conceitos Acurácia: o quão próximo o manipulador consegue atingir uma posição definida no seu espaço de trabalho; Repetibilidade: o quão próximo o manipulador retorna para um mesmo ponto; Resolução: o incremento mínimo de movimento que o manipulador pode desempenhar e detectar;
66 Acurácia x Repetibilidade
67 Perguntas?
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Manufatura assistida por computador
 Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Elementos de Robótica
 Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Disciplina: Robótica Aula 02: Conceitos Básicos
 Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
Classificação. Classificação. Classificação. Classificação. Classificação. Introdução à Robótica Manipuladores e Robótica Móvel (classificação)
") Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Classificação. Classificação. Classificação. Classificação. Classificação 03/23/2016
 Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Estrutura e características gerais dos robôs. - Configuração básica de um robô - Articulações - Movimento e precisão
 Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Programa Analítico de Disciplina ELT434 Robótica Industrial
 0 Programa Analítico de Disciplina Departamento de Engenharia Elétrica - Centro de Ciências Exatas e Tecnológicas Número de créditos: Teóricas Práticas Total Duração em semanas: 15 Carga horária semanal
0 Programa Analítico de Disciplina Departamento de Engenharia Elétrica - Centro de Ciências Exatas e Tecnológicas Número de créditos: Teóricas Práticas Total Duração em semanas: 15 Carga horária semanal
1 ESCOLA POLITÉCNICA DA USP Aspectos Gerais Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
Robótica Industrial. Professor: José Alberto Naves Cocota Júnior. UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30
 Turmas: EE8P30 e EE9P30") Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Grande precisão (posicionamento do atuador final); Carga inercial (momento) fixa, ao longo da área de trabalho;
; Carga inercial (momento) fixa, ao longo da área de trabalho;") Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Unidade 1 Introdução. 1.1 Robôs industriais
 Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Tópicos em Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Tópicos em Robótica Industrial Prof. Felipe Kühne Bibliografia:
ROBÓTICA (ROB74) AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug
 AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle:
ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle:
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A.
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Walter Fetter Lages. Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 3 Introdução à Robótica Industrial (cont.) Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 3 Introdução à Robótica Industrial (cont.) Prof. Felipe Kühne Bibliografia:
Paulo Roberto Chiarolanza Vilela 1
 Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
ASPECTOS CONSTRUTIVOS DE ROBÔS
 ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
Introdução Robôs Industriais
 ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÓTICA BRAÇO ROBÓTICO. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial BRAÇO ROBÓTICO https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial BRAÇO ROBÓTICO https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Introdução. Walter Fetter Lages
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
COMPONENTES DE UM SISTEMA ROBÓTICO
 COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1
 MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
LISTA DE EXERCÍCIOS 01
 LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
Até 0.003 mm (0.1mm usualmente) Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40
 Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40") Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Sistemas para Automação e Robótica (parte 02)
") Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas.
 4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
1 ESCOLA POLITÉCNICA DA USP Introdução Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG
 Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
AUTOMAÇÃO ROBOTIZADA
 AUTOMAÇÃO INDUSTRIAL PARTE 3 AUTOMAÇÃO ROBOTIZADA Nestor Agostini sibratec@sibratec.ind.br Rio do Sul (SC), 12 de março de 2014 1/18 1. DEFINIÇÃO DE ROBÔ A definição de robôs é, e talvez permanecerá, objeto
AUTOMAÇÃO INDUSTRIAL PARTE 3 AUTOMAÇÃO ROBOTIZADA Nestor Agostini sibratec@sibratec.ind.br Rio do Sul (SC), 12 de março de 2014 1/18 1. DEFINIÇÃO DE ROBÔ A definição de robôs é, e talvez permanecerá, objeto
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
ROBÓTICA CINEMÁTICA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Apresentação do Curso e Motivação
 SEM0317 Dinâmica e Controle de Sistemas Robóticos I Apresentação do Curso e Motivação Prof. Dr. Marcelo Becker M.Sc. Leonardo Marquez Pedro SEM - EESC - USP Sumário da Aula Ementa Avaliação Datas Importantes
SEM0317 Dinâmica e Controle de Sistemas Robóticos I Apresentação do Curso e Motivação Prof. Dr. Marcelo Becker M.Sc. Leonardo Marquez Pedro SEM - EESC - USP Sumário da Aula Ementa Avaliação Datas Importantes
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
Modelo Cinemático Inverso. Prof. Walter Fetter Lages 16 de setembro de 2007
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em Engenharia Elétrica ELE00070-Tópicos Especiais em Controle e Automação I
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em Engenharia Elétrica ELE00070-Tópicos Especiais em Controle e Automação I
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
ROBÓTICA (ROB74) AULA 6. PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug
 AULA 6. PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 6 PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug PROGRAMA INTRODUÇÃO AO PLANEJAMENTO DE TRAJETÓRIAS Tipos de Movimento Planejamento nas Juntas Com pontos Intermediários Planejamento
ROBÓTICA (ROB74) AULA 6 PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug PROGRAMA INTRODUÇÃO AO PLANEJAMENTO DE TRAJETÓRIAS Tipos de Movimento Planejamento nas Juntas Com pontos Intermediários Planejamento
BRAÇO MECÂNICO 2.1. Introdução
 BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
Introdução à Robótica Industrial p. 1/23
 Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 4 Introdução à Robótica Industrial p. 1/23 Cinemática Direta Dado: variáveis das juntas (ângulos ou deslocamentos) Procurado: posição e orientação
Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 4 Introdução à Robótica Industrial p. 1/23 Cinemática Direta Dado: variáveis das juntas (ângulos ou deslocamentos) Procurado: posição e orientação
Robótica - utilização, programação, modelagem e controle de robôs industriais
 Robótica - utilização, programação, modelagem e controle de robôs industriais SÉRIE DE EXERCÍCIOS 16 MODELAGEM CINEMÁTICA DE UM MANIPULADOR COM SEIS GRAUS DE LIBERDADE REVISÃO DE CONCEITOS A seguir são
Robótica - utilização, programação, modelagem e controle de robôs industriais SÉRIE DE EXERCÍCIOS 16 MODELAGEM CINEMÁTICA DE UM MANIPULADOR COM SEIS GRAUS DE LIBERDADE REVISÃO DE CONCEITOS A seguir são
Engenharia de Controle e Automação: ENG03316 Mecanismos I Engenharia Elétrica: ENG10017 Sistemas e Sinais e ENG04475 Microprocessadores I
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PLANO DE ENSINO PERÍODO LETIVO 2018/2 DISCIPLINA: ROBÓTICA A ENG10026 Créditos:
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PLANO DE ENSINO PERÍODO LETIVO 2018/2 DISCIPLINA: ROBÓTICA A ENG10026 Créditos:
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
Introdução à Robótica Industrial p. 1/25
 Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 5 Introdução à Robótica Industrial p. 1/25 Espaço das juntas e Espaço das posições e orientações Espaço das juntas: q = q 1 q 2. { q i = θ i,
Introdução à Robótica Industrial Adriano A. G. Siqueira Aula 5 Introdução à Robótica Industrial p. 1/25 Espaço das juntas e Espaço das posições e orientações Espaço das juntas: q = q 1 q 2. { q i = θ i,
Objetivos desta aula. Modelo cinemático inverso: Métodos analíticos (ou soluções fechadas): Geométrico (por Trigonometria). Algébrico.
: Geométrico (por Trigonometria). Algébrico.") Robótica Objetivos desta aula Modelo cinemático inverso: Métodos analíticos (ou soluções fechadas): Geométrico (por Trigonometria). Algébrico. Bibliografia Capítulos 4 do Craig. Robot Manipulators: Mathematics,
Robótica Objetivos desta aula Modelo cinemático inverso: Métodos analíticos (ou soluções fechadas): Geométrico (por Trigonometria). Algébrico. Bibliografia Capítulos 4 do Craig. Robot Manipulators: Mathematics,
Seminário: Uso de Simuladores no Ensino da Robótica
 1 o SICGRAPI - Simpósio em Computação Gráfica e Processamento de Imagens LARVA LAboratório de Realidade Virtual Aplicada Seminário: Uso de Simuladores no Ensino da Robótica Conteúdo Introdução (~10 ) Demonstrações
1 o SICGRAPI - Simpósio em Computação Gráfica e Processamento de Imagens LARVA LAboratório de Realidade Virtual Aplicada Seminário: Uso de Simuladores no Ensino da Robótica Conteúdo Introdução (~10 ) Demonstrações
ROBÓTICA SISTEMAS DE REFERÊNCIA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial SISTEMAS DE REFERÊNCIA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial SISTEMAS DE REFERÊNCIA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Aplicação de Robôs nas Indústrias
 Aplicação de Robôs nas Indústrias Teodiano Freire Bastos Filho Departamento de Engenharia Elétrica Universidade Federal do Espírito Santo Av. Fernando Ferrari, 514 29060-900 Vitoria (ES), Brasil 1. Introdução
Aplicação de Robôs nas Indústrias Teodiano Freire Bastos Filho Departamento de Engenharia Elétrica Universidade Federal do Espírito Santo Av. Fernando Ferrari, 514 29060-900 Vitoria (ES), Brasil 1. Introdução
Cinemática (warmup) Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT") Cinemática (warmup) Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 10/03/2019 Sumário Introdução Descrições espaciais Mapeamentos Transformações homogêneas
Cinemática (warmup) Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 10/03/2019 Sumário Introdução Descrições espaciais Mapeamentos Transformações homogêneas
UNIVERSIDADE DO VALE DO PARAÍBA FACULDADE DE ENGENHARIA, ARQUITETURA E URBANISMO ENGENHARIA ELÉTRICA / ELETRÔNICA
 UNIVERSIDADE DO VALE DO PARAÍBA FACULDADE DE ENGENHARIA, ARQUITETURA E URBANISMO ENGENHARIA ELÉTRICA / ELETRÔNICA LABORATÓRIO VIRTUAL PARA SIMULAÇÃO E CONTROLE DO ROBÔ PUMA EM AMBIENTE MATLAB/ SIMULINK
UNIVERSIDADE DO VALE DO PARAÍBA FACULDADE DE ENGENHARIA, ARQUITETURA E URBANISMO ENGENHARIA ELÉTRICA / ELETRÔNICA LABORATÓRIO VIRTUAL PARA SIMULAÇÃO E CONTROLE DO ROBÔ PUMA EM AMBIENTE MATLAB/ SIMULINK
DEFINIÇÃO DE ROBÔ INDUSTRIAL
 DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
MANIPULADORES ROBÓTICOS INDUSTRIAIS
 MANIPULADORES ROBÓTICOS INDUSTRIAIS Paulo Victor Galvão Simplício 1 Beatriz Rêgo Lima 2 Janaína Accordi Junkes 3 Engenharia Mecatrônica ciências exatas e tecnológicas ISSN IMPRESSO 1980-1777 ISSN ELETRÔNICO
MANIPULADORES ROBÓTICOS INDUSTRIAIS Paulo Victor Galvão Simplício 1 Beatriz Rêgo Lima 2 Janaína Accordi Junkes 3 Engenharia Mecatrônica ciências exatas e tecnológicas ISSN IMPRESSO 1980-1777 ISSN ELETRÔNICO
Funções para a Cinemática de Robôs
 Funções para a Cinemática de Robôs 19 de novembro de 2010 1 Tarefa funções Construir as no Scilab as seguintes funções: 1. Rot_x(theta) Recebe um ângulo θ e entrega a matriz de rotação x para o giro de
Funções para a Cinemática de Robôs 19 de novembro de 2010 1 Tarefa funções Construir as no Scilab as seguintes funções: 1. Rot_x(theta) Recebe um ângulo θ e entrega a matriz de rotação x para o giro de
Robótica. Índice. Cap. 1 Introdução. Cap. 2 Automação da produção História da robótica Automação
 3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
Avaliação Datas Importantes Contato Bibliografia Recomendada Motivação. EESC-USP M. Becker /21
 SEM0317 Dinâmica e Controle de Sistemas Robóticos I Apresentação do Curso e Motivação Prof. Dr. Marcelo Becker M.Sc. Kelen C. T. Vivaldini SEM - EESC - USP Sumário da Aula Ementa Avaliação Datas Importantes
SEM0317 Dinâmica e Controle de Sistemas Robóticos I Apresentação do Curso e Motivação Prof. Dr. Marcelo Becker M.Sc. Kelen C. T. Vivaldini SEM - EESC - USP Sumário da Aula Ementa Avaliação Datas Importantes
INTRODUÇÃO À DINÂMICA E AO CONTROLE DE MANIPULADORES ROBÓTICOS
 INTRODUÇÃO À DINÂMICA E AO CONTROLE DE MANIPULADORES ROBÓTICOS APOSTILA COMPILADA PELO PROF. RENATO MOLINA DA SILVA, PARA USO DOS ALUNOS DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO DA PUCRS, COM BASE
INTRODUÇÃO À DINÂMICA E AO CONTROLE DE MANIPULADORES ROBÓTICOS APOSTILA COMPILADA PELO PROF. RENATO MOLINA DA SILVA, PARA USO DOS ALUNOS DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO DA PUCRS, COM BASE
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Robótica. Executores. Prof. Oswaldo Flório Filho Profª. Alice Flora Madeira Ribeiro Flório Prof. Wagner Toscano
 Executores Conteúdo 1 Executores... 3 1.1 Espaço de trabalho... 6 1.2 Graus de Liberdade... 6 2 Tipos básicos de manipuladores... 8 2.1 Braço Mecânico Articulado... 8 2.2 Classificação dos robôs manipuladores
Executores Conteúdo 1 Executores... 3 1.1 Espaço de trabalho... 6 1.2 Graus de Liberdade... 6 2 Tipos básicos de manipuladores... 8 2.1 Braço Mecânico Articulado... 8 2.2 Classificação dos robôs manipuladores
ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto
 ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto Robótica Industrial MIEEC FEUP (8MAR2011) Pag. 1 FORMAÇÃO DA 1ª
ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto Robótica Industrial MIEEC FEUP (8MAR2011) Pag. 1 FORMAÇÃO DA 1ª
CONTROLE CINEMÁTICO DE UM ROBÔ ANTROPOMÓRFICO COM PUNHO ESFÉRICO
 CONTROLE CINEMÁTICO DE UM ROBÔ ANTROPOMÓRFICO COM PUNHO ESFÉRICO José Alberto Naves Cocota Júnior cocota@em.ufop.br Thiago D Angelo thiago.d.angelo@hotmail.com João Victor Oliveira eca.joaovictor@yahoo.com.br
CONTROLE CINEMÁTICO DE UM ROBÔ ANTROPOMÓRFICO COM PUNHO ESFÉRICO José Alberto Naves Cocota Júnior cocota@em.ufop.br Thiago D Angelo thiago.d.angelo@hotmail.com João Victor Oliveira eca.joaovictor@yahoo.com.br
Cinemática Inversa de Manipuladores
 Cinemática Inversa de Manipuladores 1998Mario Campos 1 Introdução Cinemática Inversa Como calcular os valores das variáveis de junta que produzirão a posição e orientação desejadas do órgão terminal? 1998Mario
Cinemática Inversa de Manipuladores 1998Mario Campos 1 Introdução Cinemática Inversa Como calcular os valores das variáveis de junta que produzirão a posição e orientação desejadas do órgão terminal? 1998Mario
SEM Controle de Sistemas Robóticos
 SEM5875 - Controle de Sistemas Robóticos Adriano A. G. Siqueira Aula 1 - Revisão de Cinemática, Dinâmica e Propriedades das Matrizes Dinâmicas SEM5875 - Controle de Sistemas Robóticos p. 1/61 Matrizes
SEM5875 - Controle de Sistemas Robóticos Adriano A. G. Siqueira Aula 1 - Revisão de Cinemática, Dinâmica e Propriedades das Matrizes Dinâmicas SEM5875 - Controle de Sistemas Robóticos p. 1/61 Matrizes
ALGORITMOS GENÉTICOS APLICADOS NA CINEMÁTICA INVERSA DE MANIPULADOR ROBÓTICO COM 4 GRAUS DE LIBERDADE
 ALGORITMOS GENÉTICOS APLICADOS NA CINEMÁTICA INVERSA DE MANIPULADOR ROBÓTICO COM 4 GRAUS DE LIBERDADE Márcio Mendonça 1 (Prof. Doutor em Engenharia Elétrica, Universidade Tecnológica Federal do Paraná
ALGORITMOS GENÉTICOS APLICADOS NA CINEMÁTICA INVERSA DE MANIPULADOR ROBÓTICO COM 4 GRAUS DE LIBERDADE Márcio Mendonça 1 (Prof. Doutor em Engenharia Elétrica, Universidade Tecnológica Federal do Paraná
Robótica. Prof. Reinaldo Bianchi Centro Universitário FEI 2016
 Robótica Prof. Reinaldo Bianchi Centro Universitário FEI 2016 5 a Aula Pós Graduação - IECAT Objetivos desta aula Velocidade e Aceleração de corpo rígido. Matrizes de inércia. Bibliografia Capítulos 5
Robótica Prof. Reinaldo Bianchi Centro Universitário FEI 2016 5 a Aula Pós Graduação - IECAT Objetivos desta aula Velocidade e Aceleração de corpo rígido. Matrizes de inércia. Bibliografia Capítulos 5
Projeto e Implementação de um Robô Manipulador para a Educação
 Projeto e Implementação de um Robô Manipulador para a Educação José Alberto Naves Cocota Júnior, Paulo Henrique Vieira Magalhães, Thiago D'Angelo, João Gabriel Castilho Haine, Mariana de Souza Sanchez,
Projeto e Implementação de um Robô Manipulador para a Educação José Alberto Naves Cocota Júnior, Paulo Henrique Vieira Magalhães, Thiago D'Angelo, João Gabriel Castilho Haine, Mariana de Souza Sanchez,
ROBÓTICA INDUSTRIAL. Engenharia Elétrica
 ROBÓTICA INDUSTRIAL Prof Daniel Hasse Engenharia Elétrica SÃO JOSÉ DOS CAMPOS, SP Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia
ROBÓTICA INDUSTRIAL Prof Daniel Hasse Engenharia Elétrica SÃO JOSÉ DOS CAMPOS, SP Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia
PMR 3405 Mecanismos para automação. Prof. Dr. Tarcisio A. H. Coelho 2017
 PMR 3405 Mecanismos para automação Prof. Dr. Tarcisio A. H. Coelho 2017 Topologia de Máquinas e seus subsistemas. Transmissões mecânicas Introdução Aplicações industriais Topologia e mobilidade Métodos
PMR 3405 Mecanismos para automação Prof. Dr. Tarcisio A. H. Coelho 2017 Topologia de Máquinas e seus subsistemas. Transmissões mecânicas Introdução Aplicações industriais Topologia e mobilidade Métodos
Controle de Manipuladores Robóticos
 SEM0317 Aula 8 Controle de Manipuladores Robóticos Prof. Assoc. Marcelo Becker Prof. Assoc. Adriano Siqueira USP - EESC - SEM Sumário do Módulo Introdução ao Controle de Robôs Manipuladores Simulador de
SEM0317 Aula 8 Controle de Manipuladores Robóticos Prof. Assoc. Marcelo Becker Prof. Assoc. Adriano Siqueira USP - EESC - SEM Sumário do Módulo Introdução ao Controle de Robôs Manipuladores Simulador de
DESENVOLVIMENTO DE UM MANIPULADOR ROBÓTICO INTELIGENTE
 DESENVOLVIMENTO DE UM MANIPULADOR ROBÓTICO INTELIGENTE GABRIEL, A. T. 1 ; NOGUEIRA, R. G. 2 1. INTRODUÇÃO (justificativa e objetivos) O que motivou a elaboração deste projeto foi o desafio de construir
DESENVOLVIMENTO DE UM MANIPULADOR ROBÓTICO INTELIGENTE GABRIEL, A. T. 1 ; NOGUEIRA, R. G. 2 1. INTRODUÇÃO (justificativa e objetivos) O que motivou a elaboração deste projeto foi o desafio de construir
Movimento de Corpos Rígidos e
 Capítulo 2 Movimento de Corpos Rígidos e Transformações Homogêneas Boa parte do estudo em cinemática dos manipuladores preocupa-se em definir sistemas de coordenadas de forma que se possa representar posições
Capítulo 2 Movimento de Corpos Rígidos e Transformações Homogêneas Boa parte do estudo em cinemática dos manipuladores preocupa-se em definir sistemas de coordenadas de forma que se possa representar posições
Controle de Robôs Manipuladores
 Universidade de São Paulo Escola de Engenharia de São Carlos Departamento de Engenharia Mecânica Sumário Introdução e Simulador Introdução ao Simulador de Robô Manipulador Planar de 2 Graus de Liberdade
Universidade de São Paulo Escola de Engenharia de São Carlos Departamento de Engenharia Mecânica Sumário Introdução e Simulador Introdução ao Simulador de Robô Manipulador Planar de 2 Graus de Liberdade
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Aula 01 - Introdução a Robótica Conceitos básicos Histórico Classificação dos robôs Vantagens da utilização Definição de Robôs A palavra robot foi introduzida pelo
Prof. Daniel Hasse Robótica Industrial Aula 01 - Introdução a Robótica Conceitos básicos Histórico Classificação dos robôs Vantagens da utilização Definição de Robôs A palavra robot foi introduzida pelo
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2014 Ensino Técnico ETEC PAULINO BOTELHO Código: 091 Município: SÃO CARLOS Eixo Tecnológico: CONTROLE E PROCESSOS INDUSTRIAIS Habilitação Profissional: TÉCNICO EM MECATRÔNICA
Plano de Trabalho Docente 2014 Ensino Técnico ETEC PAULINO BOTELHO Código: 091 Município: SÃO CARLOS Eixo Tecnológico: CONTROLE E PROCESSOS INDUSTRIAIS Habilitação Profissional: TÉCNICO EM MECATRÔNICA
Manufatura assistida por Computador
 Manufatura assistida por Computador Cinemática Direta em Manipuladores Robóticos for MATLAB Professor Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica 2013/01 Álgebra linear
Manufatura assistida por Computador Cinemática Direta em Manipuladores Robóticos for MATLAB Professor Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica 2013/01 Álgebra linear
SEM Aula 2 Graus de Liberdade em Cadeias Cinemáticas. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ. DCEEng - Departamento de Ciências Exatas e Engenharias
 0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
Sistemas Mecatrônicos 1
 Sistemas Mecatrônicos 1 Módulo 5 Elementos mecânicos de sistemas mecatrônicos Prof. Leonardo Marquez Pedro Os elementos mecânicos são utilizados na construção da cadeia cinemática dos diferentes tipos
Sistemas Mecatrônicos 1 Módulo 5 Elementos mecânicos de sistemas mecatrônicos Prof. Leonardo Marquez Pedro Os elementos mecânicos são utilizados na construção da cadeia cinemática dos diferentes tipos
CAPÍTULO 5. Considere-se uma matriz de rotação variante no tempo R = R(t). Tendo em vista a ortogonalidade de R, pode-se escrever
. Tendo em vista a ortogonalidade de R, pode-se escrever") Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador 54 CAPÍTULO 5 CINEMÁTICA DA VELOCIDADE E DA ACELERAÇÃO O JACOBIANO DO MANIPULADOR 5.1 INTRODUÇÃO Nos capítulos anteriores
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador 54 CAPÍTULO 5 CINEMÁTICA DA VELOCIDADE E DA ACELERAÇÃO O JACOBIANO DO MANIPULADOR 5.1 INTRODUÇÃO Nos capítulos anteriores
ROBÓTICA DENAVIT- HARTENBERG. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA FERNANDO MALVEZZI. Avaliação do comportamento cinemático de um mecanismo. paralelo tridimensional
 UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA FERNANDO MALVEZZI Avaliação do comportamento cinemático de um mecanismo paralelo tridimensional São Paulo 2006 FERNANDO MALVEZZI Avaliação do comportamento
UNIVERSIDADE DE SÃO PAULO ESCOLA POLITÉCNICA FERNANDO MALVEZZI Avaliação do comportamento cinemático de um mecanismo paralelo tridimensional São Paulo 2006 FERNANDO MALVEZZI Avaliação do comportamento
Robôs Industriais conceitos, classificação, aplicação e programação
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÓTICA. Equacionamento da Cinemática Direta de Robôs
 ROBÓTICA Equacionamento da Cinemática Direta de Robôs Prof. Dr. Carlo Pece Depto. de Eletrotécnica UTFPR Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos UTFPR 1 Cinemática
ROBÓTICA Equacionamento da Cinemática Direta de Robôs Prof. Dr. Carlo Pece Depto. de Eletrotécnica UTFPR Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos UTFPR 1 Cinemática
Análise da Dinâmica Não Linear de um Braço Robótico
 Trabalho apresentado no CNMAC, Gramado - RS, 2016. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics Análise da Dinâmica Não Linear de um Braço Robótico Antropomórfico
Trabalho apresentado no CNMAC, Gramado - RS, 2016. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics Análise da Dinâmica Não Linear de um Braço Robótico Antropomórfico
ROBÓTICA INDUSTRIAL MECATRÔNICA
 A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
MODELAGEM MATEMÁTICA DA CINEMÁTICA INVERSA DO ROBÔ FANUC LR MATE 200IC COM SIMULAÇÃO NO MATLAB
 MODELAGEM MATEMÁTICA DA CINEMÁTICA INVERSA DO ROBÔ FANUC LR MATE 200IC COM SIMULAÇÃO NO MATLAB Sérgio Ricardo Xavier da Silva, M.Sc. sergio.silva@unifacs.br Rafael Gonçalves Bezerra de Araújo, M.Sc. rafael.araujo@unifacs.br
MODELAGEM MATEMÁTICA DA CINEMÁTICA INVERSA DO ROBÔ FANUC LR MATE 200IC COM SIMULAÇÃO NO MATLAB Sérgio Ricardo Xavier da Silva, M.Sc. sergio.silva@unifacs.br Rafael Gonçalves Bezerra de Araújo, M.Sc. rafael.araujo@unifacs.br
CONTROLE DE ROBÔS EM CONFIGURAÇÕES SINGULARES
 CONTROLE DE ROBÔS EM CONFIGURAÇÕES SINGULARES Aluno: André de Freitas Serapião Orientador: Antonio Candea Leite Introdução A importância do desenvolvimento dos sistemas robóticos e a aplicabilidade da
CONTROLE DE ROBÔS EM CONFIGURAÇÕES SINGULARES Aluno: André de Freitas Serapião Orientador: Antonio Candea Leite Introdução A importância do desenvolvimento dos sistemas robóticos e a aplicabilidade da
viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são apresentados
 35 3 Análise topológica do mecanismo A geração da topologia deste mecanismo tem como objetivo obter uma arquitetura para viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são
35 3 Análise topológica do mecanismo A geração da topologia deste mecanismo tem como objetivo obter uma arquitetura para viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são