INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
|
|
|
- Mateus Canela Lima
- 7 Há anos
- Visualizações:
Transcrição
1 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
2 Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento, Doméstico e pessoal. 2
3 Pode-se classificar os robôs com base em sua características físicas: Robôs Manipuladores, Robôs Móveis baseados em rodas, Robôs Móveis com pernas: Bípedes,Quadrúpedes,Hexapódes, etc Humanóides: Bípedes com cabeça, tronco, braços e pernas. Aéreos, Aquáticos. 3
4 Todo braço de robô é composto de uma série de vínculos(elos) e juntas, onde a junta conecta dois vínculos permitindo o movimento relativo entre eles. Todo robô possui uma base fixa e o primeiro vínculo está preso a esta base. A mobilidade dos robôs depende do número de vínculos e articulações que o mesmo possui. 4
5 Tipos de Juntas R P Rotacional (revolute) Prismática (linear) Esférica (3 rotacionais)
6 Juntas Lineares,Prismáticas ou Deslizantes Este tipo de junta permite o movimento linear entre dois vínculos. É composto de dois vínculos alinhados um dentro do outro, onde um vínculo interno escorrega pelo externo, dando origem ao movimento linear 6

7 Juntas Rotacionais Esta conexão permite movimentos de rotação entre dois vínculos. Os dois vínculos são unidos por uma dobradiça comum, com uma parte podendo se mover num movimento cadenciado em relação à outra parte. As juntas de rotação são utilizadas em muitas ferramentas e dispositivos, tal como tesouras, limpadores de pára-brisa e quebra-nozes 7
8 Configurações de Manipuladores Robôs industriais estão disponíveis nos mais variados formatos, tamanhos, capacidades A maioria dos robôs manipuladores disponíveis hoje foi construindo seguindo uma das seguintes configurações: Retangular (ou cartesiano) Gantry Cilíndrico Esférico (ou Polar) Articulado Vertical SCARA = Articulado Horizontal 8
9 Tipos de Configurações de Manipuladores Rectangular Coordinate Robot Cylindrical Coordinate Robot Sperical Coordinate Robot Articulated Arm Robot Gantry Robot SCARA Robot
 Eixo x Eixo y Eixo z.")
10 Manipulador Retangular ou Cartesiano Movimento por meio de coordenadas cartesianas, com juntas prismáticas (PPP) Eixo x Eixo y Eixo z. As juntas prismáticas estão geralmente a 90 graus. 10
11 Envelope de Trabalho Retangular Utiliza três réguas perpendiculares para construir eixos X, Y e Z. Deslocando-se as três réguas, de uma relação à outra, o robô pode operar dentro de um espaço cúbico. 11
12 Cartesiano (PPP) Volume do espaço de trabalho: V = A 1 A 2 A 3 12

13 Robô Tipo Gantry Similares aos cartesianos, mas funcionando com base em suportes paralelos na lateral. 13
14 Envelope de Trabalho Gantry 14
15 Retangulares: Vantagens e Desvantagens Vantagens: Facilidade de visualização Facilidade de programação. Estrutura rígida. Grande área de trabalho em mesas. Desvantagens: Só pode alcançar na sua frente. Baixa relação envelope de trabalho para área ocupada. 15
16 Os robôs cartesianos caracterizam-se pela pequena área de trabalho, mas com um elevado grau de rigidez mecânica e são capazes de grande exatidão na localização do atuador. Seu controle é simples devido ao movimento linear dos vínculos e devido ao momento de inércia da carga ser fixo por toda a área de atuação. 16


17 Manipulador Cilíndrico Movimento por meio de coordenadas cilíndricas: Altura Rotação Extensão do braço Tipo RPP 17
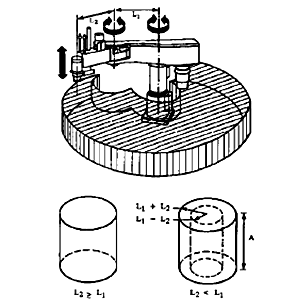
18 Envelope de Trabalho Cilíndrico Utiliza uma coluna vertical e um suporte que pode ser movido para cima ou para baixo ao longo desta. O braço do robô está ligado ao suporte para que possa ser movido radicalmente em relação à coluna. Rodando a coluna, o robô é capaz de alcançar um espaço de trabalho que se aproxima de um cilindro. 18
² - L²]")
19 Envelope de Trabalho Cilíndrico Volume do espaço de trabalho: V= pa 1 [(L+A 2 )² - L²] 19
20 Cilíndricos : Vantagens e Desvantagens Vantagens: Consegue alcançar todo seu entorno. Eixos rígidos Eixos de rotação de fácil construção. Desvantagens: Não consegue alcançar o ponto imediatamente acima do manipulador. Não consegue ultrapassar obstáculos. Movimentos na horizontal são circulares. 20
21 A área de trabalho destes robôs são maiores que os robôs cartesianos, mas a rigidez mecânica é ligeiramente inferior. O controle é um pouco mais complicado que o modelo cartesiano, devido a vários momentos de inércia para diferentes pontos na área de trabalho e pela rotação da junta da base. 21


22 Manipulador Esférico (polar) Movimento por meio de coordenadas polares: Rotação,Tilt Extensão do braço. O robô Unimate era do tipo polar =>tipo RRP 22
23 Envelope de Trabalho Esférico (Polar) Utiliza um braço telescópico que pode ser levantar ou baixar em redor de um pino horizontal. O pino está montado numa base rotativa. Estas características proporcionam ao robô a capacidade de mover o seu braço dentro de um espaço esférico. 23
24 Envelope de Trabalho Esférico (Polar) Volume do espaço de trabalho: V = 4/3p[(L+A)³ - L³] 24
25 Esféricos: Vantagens e Desvantagens Vantagens: Grande alcance na horizontal. Desvantagens: Não consegue ultrapassar um obstáculo. Geralmente possuem pequeno alcance vertical. Estes robôs tem uma área de trabalho maior que os modelos cilíndricos, mas perde na rigidez mecânica. Seu controle é ainda mais complicado devido os movimentos de rotação. 25

26 Manipulador Articulado Vertical Manipulador com diversas juntas rotativas verticais, com eixos na horizontal. Possui geralmente 3 juntas rotatórias que permite atingir qualquer posição.=> tipo RRR Alta velocidade. 26

27 Manipulador Articulado Vertical É semelhante à do braço humano. Consta de dois componentes retos (elos), correspondendo ao antebraço e braço humano, montados em um pedestal vertical. Estes componentes estão conectados por duas juntas rotacionais correspondentes ao ombro e cotovelo. Um está unido à extremidade do antebraço, proporcionando assim, diversas juntas adicionais. 27
28 Manipulador Articulado Vertical Robô antropomórfico Recebe seu nome em razão da similaridade com corpo humano 28
29 Envelope de Trabalho do Articulado Vertical 29
30 Articulado Vertical: Vantagens e Desvantagens Vantagens: Pode alcançar sobre ou sob obstáculos. A maior área de trabalho, com a menor área de alcance na mesa. Desvantagens: De duas a quatro maneiras de alcançar um ponto. É o manipulador mais complexo de todos. 30
31 Sua área de atuação é maior que qualquer tipo de robô, tendo uma baixa rigidez mecânica. Seu controle é complicado e difícil, devido as três juntas de revolução e devido à variações no momento de carga e momento de inércia. 31
. Tipo RRP Criado para manipular objetos pequenos com precisão.")
32 Manipulador Articulado Horizontal: SCARA Manipulador não tradicional, que possui juntas rotativas com eixos na vertical (juntas na horizontal). Tipo RRP Criado para manipular objetos pequenos com precisão. 32
33 Envelope de Trabalho Robô SCARA 33
34 34
35 SCARA: Vantagens e Desvantagens Vantagens: Grande área de trabalho em mesas. Pode alcançar atrás de obstáculos. Desvantagens: Duas maneiras de alcançar um ponto. Dificuldade de programação Complexidade grande do manipulador A área de atuação deste tipo de robô é menor que no modelo esférico, sendo apropriados para operações de montagem, devido ao movimento linear vertical do terceiro eixo. 35

36 Manipuladores Paralelos Outra categoria de robôs. Geralmente não são considerados manipuladores, por não ter a forma de um braço. Robô cujo braço apresenta juntas rotacionais e prismáticas conjugadas 36


37 Manipuladores Paralelos 37
Disciplina: Robótica Aula 02: Conceitos Básicos
 Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Paulo Roberto Chiarolanza Vilela 1
 Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
Grande precisão (posicionamento do atuador final); Carga inercial (momento) fixa, ao longo da área de trabalho;
; Carga inercial (momento) fixa, ao longo da área de trabalho;") Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Estrutura e características gerais dos robôs. - Configuração básica de um robô - Articulações - Movimento e precisão
 Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Gerações de Robôs 1ª Geração
 ROBÓTICA 1 Gerações de Robôs 1ª Geração tarefas repetitivas e simples, sendo que alguns robôs realizavam as suas tarefas mediante um programa de computador de escassa complexidade sendo utilizados principalmente
ROBÓTICA 1 Gerações de Robôs 1ª Geração tarefas repetitivas e simples, sendo que alguns robôs realizavam as suas tarefas mediante um programa de computador de escassa complexidade sendo utilizados principalmente
São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas.
 4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
Classificação. Classificação. Classificação. Classificação. Classificação. Introdução à Robótica Manipuladores e Robótica Móvel (classificação)
") Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Classificação. Classificação. Classificação. Classificação. Classificação 03/23/2016
 Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
ROBÓTICA (ROB74) AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug
 AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle:
ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle:
Robótica. Executores. Prof. Oswaldo Flório Filho Profª. Alice Flora Madeira Ribeiro Flório Prof. Wagner Toscano
 Executores Conteúdo 1 Executores... 3 1.1 Espaço de trabalho... 6 1.2 Graus de Liberdade... 6 2 Tipos básicos de manipuladores... 8 2.1 Braço Mecânico Articulado... 8 2.2 Classificação dos robôs manipuladores
Executores Conteúdo 1 Executores... 3 1.1 Espaço de trabalho... 6 1.2 Graus de Liberdade... 6 2 Tipos básicos de manipuladores... 8 2.1 Braço Mecânico Articulado... 8 2.2 Classificação dos robôs manipuladores
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A.
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Robótica Industrial. Professor: José Alberto Naves Cocota Júnior. UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30
 Turmas: EE8P30 e EE9P30") Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Controle de Robôs Manipuladores. Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
") Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
1 ESCOLA POLITÉCNICA DA USP Aspectos Gerais Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
ASPECTOS CONSTRUTIVOS DE ROBÔS
 ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
Elementos de Robótica
 Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Manufatura assistida por computador
 Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Walter Fetter Lages. Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
LISTA DE EXERCÍCIOS 01
 LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 3 Introdução à Robótica Industrial (cont.) Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 3 Introdução à Robótica Industrial (cont.) Prof. Felipe Kühne Bibliografia:
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Unidade 1 Introdução. 1.1 Robôs industriais
 Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
ROBÓTICA CINEMÁTICA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
BRAÇO MECÂNICO 2.1. Introdução
 BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
Sistemas para Automação e Robótica (parte 02)
") Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Introdução Robôs Industriais
 ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
ROBÓTICA DENAVIT- HARTENBERG. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Introdução. Walter Fetter Lages
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
Até 0.003 mm (0.1mm usualmente) Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40
 Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40") Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
ROBÓTICA SISTEMAS DE REFERÊNCIA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial SISTEMAS DE REFERÊNCIA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial SISTEMAS DE REFERÊNCIA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SEM534 Processos de Fabricação Mecânica. Professor - Renato G. Jasinevicius. Aula: Máquina ferramenta- Torno. Torno
 SEM534 Processos de Fabricação Mecânica Professor - Renato G. Jasinevicius Aula: Máquina ferramenta- Torno Torno Torno Existe uma grande variedade de tornos que diferem entre si pelas dimensões, características,
SEM534 Processos de Fabricação Mecânica Professor - Renato G. Jasinevicius Aula: Máquina ferramenta- Torno Torno Torno Existe uma grande variedade de tornos que diferem entre si pelas dimensões, características,
Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
MANIPULADORES ROBÓTICOS INDUSTRIAIS
 MANIPULADORES ROBÓTICOS INDUSTRIAIS Paulo Victor Galvão Simplício 1 Beatriz Rêgo Lima 2 Janaína Accordi Junkes 3 Engenharia Mecatrônica ciências exatas e tecnológicas ISSN IMPRESSO 1980-1777 ISSN ELETRÔNICO
MANIPULADORES ROBÓTICOS INDUSTRIAIS Paulo Victor Galvão Simplício 1 Beatriz Rêgo Lima 2 Janaína Accordi Junkes 3 Engenharia Mecatrônica ciências exatas e tecnológicas ISSN IMPRESSO 1980-1777 ISSN ELETRÔNICO
viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são apresentados
 35 3 Análise topológica do mecanismo A geração da topologia deste mecanismo tem como objetivo obter uma arquitetura para viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são
35 3 Análise topológica do mecanismo A geração da topologia deste mecanismo tem como objetivo obter uma arquitetura para viabilizar sua aplicação como robô manipulador. Na seção 3.1 deste capítulo são
Introdução. Introdução. Introdução. Locomoção. Introdução. Introdução à Robótica Robótica Móvel Locomoção
 Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
1 ESCOLA POLITÉCNICA DA USP Estrutura Mecânica Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
Introdução. Introdução. Introdução. Locomoção. Introdução. Introdução à Robótica Robótica Móvel Locomoção
 Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
Sistemas para Automação e
 Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
ROBÓTICA BRAÇO ROBÓTICO. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial BRAÇO ROBÓTICO https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial BRAÇO ROBÓTICO https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Tópicos em Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Tópicos em Robótica Industrial Prof. Felipe Kühne Bibliografia:
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1
 MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
5ª Lista de Exercícios Fundamentos de Mecânica Clássica Profº. Rodrigo Dias
 5ª Lista de Exercícios Fundamentos de Mecânica Clássica Profº. Rodrigo Dias Obs: Esta lista de exercícios é apenas um direcionamento, é necessário estudar a teoria referente ao assunto e fazer os exercícios
5ª Lista de Exercícios Fundamentos de Mecânica Clássica Profº. Rodrigo Dias Obs: Esta lista de exercícios é apenas um direcionamento, é necessário estudar a teoria referente ao assunto e fazer os exercícios
M E C A N I S M O S. Cadeias Cinemáticas e Imposição de Movimento. Prof. José Maria
 M E C A N I S M O S Cadeias Cinemáticas e Imposição de Movimento Prof. José Maria Conceitos Iniciais Estudo cinemático dos diversos componentes mecânicos sistemas articulados; cames e excêntricos; catracas
M E C A N I S M O S Cadeias Cinemáticas e Imposição de Movimento Prof. José Maria Conceitos Iniciais Estudo cinemático dos diversos componentes mecânicos sistemas articulados; cames e excêntricos; catracas
Lista 12: Rotação de corpos rígidos
 Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. iv. Siga a estratégia para
Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. iv. Siga a estratégia para
CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG
 Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
Capítulo 3 - Cinemática Direta de Posição. Representação de Denavit-Hartenberg 27 CAPÍTULO 03 CINEMÁTICA DIRETA DE POSIÇÃO. REPRESENTAÇÃO DE DENAVIT-HARTENBERG 3.1 INTRODUÇÃO Neste capítulo serão desenvolvidas
COMPONENTES DE UM SISTEMA ROBÓTICO
 COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
Lista 12: Rotação de corpos rígidos
 Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. Siga a estratégia para
Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. Siga a estratégia para
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
Aluno bolsista CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS Av. dos Imigrantes, 1000, Bairro Vargem Varginha MG
 OTIMIZAÇÃO DO ERRO DE DESLOCAMENTO DE UM BRAÇO ROBÓTICO COM GDL APLICANDO CINEMÁTICA DIRETA Aline de Padua Alcântara, Daniel Soares de Alcântara 2 Aluno bolsista CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA
OTIMIZAÇÃO DO ERRO DE DESLOCAMENTO DE UM BRAÇO ROBÓTICO COM GDL APLICANDO CINEMÁTICA DIRETA Aline de Padua Alcântara, Daniel Soares de Alcântara 2 Aluno bolsista CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção.
 Lista 12: Rotação de corpos rígidos NOME: Turma: Prof. : Matrícula: Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
Lista 12: Rotação de corpos rígidos NOME: Turma: Prof. : Matrícula: Importante: i. Nas cinco páginas seguintes contém problemas para se resolver e entregar. ii. Ler os enunciados com atenção. iii. Responder
O que é um Robô? É uma máquina que pode ser programada para executar várias tarefas
 O que é um Robô? É uma máquina que pode ser programada para executar várias tarefas Uma máquina que recebe informação através do ambiente que a rodeia (sensores) e usa essa informação para excutar instruções
O que é um Robô? É uma máquina que pode ser programada para executar várias tarefas Uma máquina que recebe informação através do ambiente que a rodeia (sensores) e usa essa informação para excutar instruções
FIS-14 Lista-04 Setembro/2012
 FIS-14 Lista-04 Setembro/2012 1. A posição de uma partícula é descrita por r = 300e 0,500t mm e θ = 0,300t 2 rad, onde t é dado em segundos. Determine as intensidades da velocidade e da aceleração da partícula
FIS-14 Lista-04 Setembro/2012 1. A posição de uma partícula é descrita por r = 300e 0,500t mm e θ = 0,300t 2 rad, onde t é dado em segundos. Determine as intensidades da velocidade e da aceleração da partícula
FIS-14 Lista-01 Novembro/2017
 FIS-14 Lista-01 Novembro/2017 1. A rotação do braço robótico ocorre em virtude do movimento linear dos cilindros hidráulicos A e B. Se esse movimento faz com que a engrenagem em D gire no sentido horário
FIS-14 Lista-01 Novembro/2017 1. A rotação do braço robótico ocorre em virtude do movimento linear dos cilindros hidráulicos A e B. Se esse movimento faz com que a engrenagem em D gire no sentido horário
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
MECÂNICA GERAL Apostila 3 : Rotação do Corpo Rígido. Professor Renan
 MECÂNICA GERAL Apostila 3 : Rotação do Corpo Rígido Professor Renan 1 Centro de massa Um corpo extenso pode ser considerado um sistema de partículas, cada uma com sua massa. A resultante total das massas
MECÂNICA GERAL Apostila 3 : Rotação do Corpo Rígido Professor Renan 1 Centro de massa Um corpo extenso pode ser considerado um sistema de partículas, cada uma com sua massa. A resultante total das massas
Apresentação Outras Coordenadas... 39
 Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Fundamentos de Dinâmica Veicular. Suspensões
 Fundamentos de Dinâmica Veicular Suspensões Glossário de termos técnicos http://bestcars.uol.com.br/glo/glo.htm A suspensão explicada http://bestcars.uol.com.br/tecprep/susp-1.htm Understanding a Suspension
Fundamentos de Dinâmica Veicular Suspensões Glossário de termos técnicos http://bestcars.uol.com.br/glo/glo.htm A suspensão explicada http://bestcars.uol.com.br/tecprep/susp-1.htm Understanding a Suspension
DESENVOLVIMENTO DE UM MANIPULADOR ROBÓTICO INTELIGENTE
 DESENVOLVIMENTO DE UM MANIPULADOR ROBÓTICO INTELIGENTE GABRIEL, A. T. 1 ; NOGUEIRA, R. G. 2 1. INTRODUÇÃO (justificativa e objetivos) O que motivou a elaboração deste projeto foi o desafio de construir
DESENVOLVIMENTO DE UM MANIPULADOR ROBÓTICO INTELIGENTE GABRIEL, A. T. 1 ; NOGUEIRA, R. G. 2 1. INTRODUÇÃO (justificativa e objetivos) O que motivou a elaboração deste projeto foi o desafio de construir
Robótica Móvel Locomoção e Controle. Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Robótica Móvel Locomoção e Controle Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 04/06/2018 Objetivos desta aula Conceitos básicos de controle de robôs
Robótica Móvel Locomoção e Controle Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 04/06/2018 Objetivos desta aula Conceitos básicos de controle de robôs
Robótica. Índice. Cap. 1 Introdução. Cap. 2 Automação da produção História da robótica Automação
 3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA SÃO PAULO Campus Presidente Epitácio
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA SÃO PAULO Campus Presidente Epitácio TDUA2 Aula 3 Prof. Carlos Fernando Fresadoras. Tipos de Fresamento. Fresas, Tipos de Fresas. Fresadora A fresadora
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA SÃO PAULO Campus Presidente Epitácio TDUA2 Aula 3 Prof. Carlos Fernando Fresadoras. Tipos de Fresamento. Fresas, Tipos de Fresas. Fresadora A fresadora
Dinâmica das Máquinas
 Dinâmica das Máquinas Conceito de grau de liberdade Visão geral do processo de análise de mecanismos Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Dinâmica das Máquinas Conceito de grau de liberdade Visão geral do processo de análise de mecanismos Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina,
Movimento e Mecanismos
 Um pouco de história Desde a antiguidade, o homem, procurou melhorar as suas condições de trabalho, principalmente no que se refere à redução do esforço físico. Os primeiros meios, que este utilizou, foram:
Um pouco de história Desde a antiguidade, o homem, procurou melhorar as suas condições de trabalho, principalmente no que se refere à redução do esforço físico. Os primeiros meios, que este utilizou, foram:
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Aula 01 - Introdução a Robótica Conceitos básicos Histórico Classificação dos robôs Vantagens da utilização Definição de Robôs A palavra robot foi introduzida pelo
Prof. Daniel Hasse Robótica Industrial Aula 01 - Introdução a Robótica Conceitos básicos Histórico Classificação dos robôs Vantagens da utilização Definição de Robôs A palavra robot foi introduzida pelo
Mecânica Clássica Curso - Licenciatura em Física EAD. Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA
 Mecânica Clássica Curso - Licenciatura em Física EAD Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA Aula 1 : Cinemática da partícula Aula 1 : Cinemática da partícula Exemplos Um tubo metálico, retilíneo
Mecânica Clássica Curso - Licenciatura em Física EAD Profº. M.Sc. Marcelo O Donnell Krause ILHÉUS - BA Aula 1 : Cinemática da partícula Aula 1 : Cinemática da partícula Exemplos Um tubo metálico, retilíneo
 Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ. DCEEng - Departamento de Ciências Exatas e Engenharias
 0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
ROBÓTICA INDUSTRIAL. Engenharia Elétrica
 ROBÓTICA INDUSTRIAL Prof Daniel Hasse Engenharia Elétrica SÃO JOSÉ DOS CAMPOS, SP Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia
ROBÓTICA INDUSTRIAL Prof Daniel Hasse Engenharia Elétrica SÃO JOSÉ DOS CAMPOS, SP Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia
INTRODUÇÃO À ROBÓTICA. Professor HENRIQUE
 INTRODUÇÃO À ROBÓTICA Professor HENRIQUE CONTEÚDO Introdução à Robótica Industrial Classificação Modelos e Tipos Aplicação Atividade de Pesquisa: Transmissão de Força Definição; Elementos Constituintes;
INTRODUÇÃO À ROBÓTICA Professor HENRIQUE CONTEÚDO Introdução à Robótica Industrial Classificação Modelos e Tipos Aplicação Atividade de Pesquisa: Transmissão de Força Definição; Elementos Constituintes;
DEFINIÇÃO DE ROBÔ INDUSTRIAL
 DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
ROBÓTICA. Equacionamento da Cinemática Direta de Robôs
 ROBÓTICA Equacionamento da Cinemática Direta de Robôs Prof. Dr. Carlo Pece Depto. de Eletrotécnica UTFPR Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos UTFPR 1 Cinemática
ROBÓTICA Equacionamento da Cinemática Direta de Robôs Prof. Dr. Carlo Pece Depto. de Eletrotécnica UTFPR Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos UTFPR 1 Cinemática
EQUILÍBRIO DO CORPO RÍGIDO EXERCÍCIOS
 EQUILÍBRIO DO CORPO RÍGIDO EXERCÍCIOS 1. O esquadro metálico BD tem um apoio fixo em C e liga-se a um cabo em B. Para o carregamento representado, determine (a) a força de tração no cabo, (b) a reação
EQUILÍBRIO DO CORPO RÍGIDO EXERCÍCIOS 1. O esquadro metálico BD tem um apoio fixo em C e liga-se a um cabo em B. Para o carregamento representado, determine (a) a força de tração no cabo, (b) a reação
ANEXO I ESPECIFICAÇÕES PARA A FABRICAÇÃO DE ESPELHOS RETROVISORES
 ANEXO I ESPECIFICAÇÕES PARA A FABRICAÇÃO DE ESPELHOS RETROVISORES 1 DEFINIÇÕES 1.1. Define-se por Tipo de espelho retrovisor o dispositivo que não difere entre si quanto às seguintes características fundamentais:
ANEXO I ESPECIFICAÇÕES PARA A FABRICAÇÃO DE ESPELHOS RETROVISORES 1 DEFINIÇÕES 1.1. Define-se por Tipo de espelho retrovisor o dispositivo que não difere entre si quanto às seguintes características fundamentais:
LISTA DE EXERCÍCIOS Nº 10. 2) O que ocorre com o ioiô inicialmente estacionário da Figura 2 se este é excitado por uma força (a) F 2, (b)
 O que ocorre com o ioiô inicialmente estacionário da Figura 2 se este é excitado por uma força (a) F 2, (b)") LISTA DE EXERCÍCIOS Nº 10 Questões 1) Na Figura 1, 3 forças de mesma magnitude são aplicadas em uma partícula que encontra-se na origem do sistema de referência. Ordene as forças de acordo com as magnitudes
LISTA DE EXERCÍCIOS Nº 10 Questões 1) Na Figura 1, 3 forças de mesma magnitude são aplicadas em uma partícula que encontra-se na origem do sistema de referência. Ordene as forças de acordo com as magnitudes
 Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
MOTOR A RELUTÂNCIA CHAVEADO
 MOTOR A RELUTÂNCIA CHAVEADO Joaquim Eloir Rocha 1 Introdução O Motor a Relutância Chaveado (MRC) ou SRM (Switched Reluctance Motor) é conhecido desde meados de 1940 quando seu primeiro protótipo foi desenvolvido
MOTOR A RELUTÂNCIA CHAVEADO Joaquim Eloir Rocha 1 Introdução O Motor a Relutância Chaveado (MRC) ou SRM (Switched Reluctance Motor) é conhecido desde meados de 1940 quando seu primeiro protótipo foi desenvolvido
Contracer L-19. Contracer CV-2100 Série 218 Equipamento para Medição de Contorno ESPECIFICAÇÕES
 Fornecido com certificado de inspeção. Consulte a página IX para detalhes. Contracer CV-2100 Série 218 Equipamento para de Contorno digital nos eixos X e Z ESPECIFICAÇÕES CV-2100M4 CV-2100M4 CV-2100N4
Fornecido com certificado de inspeção. Consulte a página IX para detalhes. Contracer CV-2100 Série 218 Equipamento para de Contorno digital nos eixos X e Z ESPECIFICAÇÕES CV-2100M4 CV-2100M4 CV-2100N4
Cinesiologia e Biomecânica Prof. Sandro de Souza
 CINESIOLOGIA E BIOMECANICA CINÉTICA ANGULAR CINÉTICA - Ramo da mecânica que estuda as causas do movimento. CINÉTICA ANGULAR Ramo da mecânica que estuda as causas do movimento angular. 1) TORQUE É definido
CINESIOLOGIA E BIOMECANICA CINÉTICA ANGULAR CINÉTICA - Ramo da mecânica que estuda as causas do movimento. CINÉTICA ANGULAR Ramo da mecânica que estuda as causas do movimento angular. 1) TORQUE É definido
AUTOMAÇÃO ROBOTIZADA
 AUTOMAÇÃO INDUSTRIAL PARTE 3 AUTOMAÇÃO ROBOTIZADA Nestor Agostini sibratec@sibratec.ind.br Rio do Sul (SC), 12 de março de 2014 1/18 1. DEFINIÇÃO DE ROBÔ A definição de robôs é, e talvez permanecerá, objeto
AUTOMAÇÃO INDUSTRIAL PARTE 3 AUTOMAÇÃO ROBOTIZADA Nestor Agostini sibratec@sibratec.ind.br Rio do Sul (SC), 12 de março de 2014 1/18 1. DEFINIÇÃO DE ROBÔ A definição de robôs é, e talvez permanecerá, objeto
Locomoção. Meios de Locomoção
 Locomoção Meios de Locomoção Propriedades da Locomoção Locomoção com Rodas 1 Meios de Locomoção Meios de locomoção terrestre: Rodas: o mais simples meio de locomoção; Esteiras: amplia a área de contato
Locomoção Meios de Locomoção Propriedades da Locomoção Locomoção com Rodas 1 Meios de Locomoção Meios de locomoção terrestre: Rodas: o mais simples meio de locomoção; Esteiras: amplia a área de contato
ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto
 ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto Robótica Industrial MIEEC FEUP (8MAR2011) Pag. 1 FORMAÇÃO DA 1ª
ROBÓTICA INDUSTRIAL Mestrado Integrado em Engenharia Electrotécnica e de Computadores de Faculdade de Engenharia da Universidade do Porto Robótica Industrial MIEEC FEUP (8MAR2011) Pag. 1 FORMAÇÃO DA 1ª
Válvulas de Controle 25/11/20122
 25/11/2012 1 2012 25/11/20122 2 Tipos de Válvulas Os tipos de válvulas classificam-se em função dos respectivos tipos de corpos, e portanto, quando estivermos falando de tipos de válvulas deve-se subentender
25/11/2012 1 2012 25/11/20122 2 Tipos de Válvulas Os tipos de válvulas classificam-se em função dos respectivos tipos de corpos, e portanto, quando estivermos falando de tipos de válvulas deve-se subentender
As variáveis de rotação
 Capítulo 10 Rotação Neste capítulo vamos estudar o movimento de rotação de corpos rígidos sobre um eixo fixo. Para descrever esse tipo de movimento, vamos introduzir os seguintes conceitos novos: -Deslocamento
Capítulo 10 Rotação Neste capítulo vamos estudar o movimento de rotação de corpos rígidos sobre um eixo fixo. Para descrever esse tipo de movimento, vamos introduzir os seguintes conceitos novos: -Deslocamento
1. INTRODUÇÃO 2. CARACTERÍSTICAS PRINCIPAIS
 1. INTRODUÇÃO 2. CARACTERÍSTICAS PRINCIPAIS A minigrua SMC.4 é um equipamento de avançada tecnologia, dotado de um exclusivo mecanismo que mantém a direção do ângulo tilt durante a movimentação da câmara
1. INTRODUÇÃO 2. CARACTERÍSTICAS PRINCIPAIS A minigrua SMC.4 é um equipamento de avançada tecnologia, dotado de um exclusivo mecanismo que mantém a direção do ângulo tilt durante a movimentação da câmara
ROBÓTICA PLANEJAMENTO DE TRAJETÓRIAS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial PLANEJAMENTO DE TRAJETÓRIAS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial PLANEJAMENTO DE TRAJETÓRIAS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br
ENG1200 Mecânica Geral Semestre Lista de Exercícios 6 Corpos Submersos
 ENG1200 Mecânica Geral Semestre 2013.2 Lista de Exercícios 6 Corpos Submersos 1 Prova P3 2013.1 - O corpo submerso da figura abaixo tem 1m de comprimento perpendicularmente ao plano do papel e é formado
ENG1200 Mecânica Geral Semestre 2013.2 Lista de Exercícios 6 Corpos Submersos 1 Prova P3 2013.1 - O corpo submerso da figura abaixo tem 1m de comprimento perpendicularmente ao plano do papel e é formado