ÁLGEBRA 1. Departamento de Matemática UDESC - Joinville
|
|
|
- Leandro Ribeiro Amaral
- 5 Há anos
- Visualizações:
Transcrição
1 ÁLGEBRA 1 Departamento de Matemática UDESC - Joinville
2 Conteúdo 1 CURVAS Cilindros projetantes de uma curva Exemplo Construção geométrica da curva formada pela interseção de seus cilindros projetantes Exemplos Exercícios Equações Paramétricas Exemplo Equações paramétricas de algumas curvas Exemplos Equação vetorial das curvas Exemplos Exercícios SISTEMAS DE COORDENADAS.1 Coordenadas polares no R Exemplo Relação entre o Sistema de Coordenadas Cartesianas Retangulares e o Sistema de Coordenadas Polares Exemplos Gráficos de Equações em Coordenadas Polares Exemplos Algumas Equações em Coordenadas Polares e seus respectivos Gráficos Exercícios Respostas Coordenadas polares no R Coordenadas cilíndricas Coordenadas esféricas Exemplos Exercícios Respostas TRANSFORMAÇÃO DE COORDENADAS Translação de eixos coordenados Exemplos Exercícios Respostas Rotação dos eixos coordenados Exemplos Exercícios Respostas

3 3 1 CURVAS 1.1 Cilindros projetantes de uma curva Dada uma curva C no espaço é possível obter três cilindros retos cujas interseções fornecem a curva C. Estes cilindros são obtidos projetando-se a curva em cada um dos planos coordenados. Portanto, projetando a curva no plano xy teremos um cilindro cuja diretriz é a curva C e a geratriz é o eixo z, projetando a curva no plano xz teremos um cilindro cuja diretriz é a curva C e a geratriz é o eixo y e projetando a curva no plano yz teremos um cilindro cuja diretriz é a curva C e a geratriz é o eixo x. Figura 1: Dada uma curva no espaço representada pela interseção das superfícies g(x, y, z) = 0, (1) f(x, y, z) = 0, podemos representá-la analiticamente por qualquer das equações de duas superfícies que se interceptam segundo a mesma curva. As superfícies mais amenas para se trabalhar são os cilindros e dada uma curva no espaço podemos sempre obter esta mesma curva através da interseção de dois cilindros.
4 4 Com efeito, consideramos os sistemas equivalentes ao sistema (1) formado por um par qualquer das equações F (x, y) = 0, G(y, z) = 0, H(x, z) = 0, resultante da eliminação respectiva das variáveis z, x, y. Cada um desses sistemas representa a mesma curva C. Geometricamente, estes cilindros são obtidos projetando-se a curva nos três planos coordenados e, por isso, são chamados cilindros projetantes da curva Exemplo 1. Determinar os cilindros projetantes da curva dada pela interseção das superfícies 4x + y + z 7 = 0, () x + y z + 1 = 0. Para eliminar a variável x, multiplicamos a segunda equação por e a primeira por 1 e em seguida somamos as duas equações Obtemos o cilindro hiperbólico 4x y z + 7 = 0, 4x + y z + = 0. 3z y = 9. (3) Para eliminar a variável y, devemos retornar ao sistema () e multiplicar a segunda equação por 1 e somar com a primeira equação Obtemos o cilindro circular 4x + y + z 7 = 0, x y + z 1 = 0. x + z = 4. (4) Para eliminar a variável z, voltamos ao sistema () e adicionamos as duas equações 4x + y + z 7 = 0, x + y z + 1 = 0.
5 5 Encontramos como resultado o cilindro circular 3x + y = 3. (5) A mesma curva representada pelo sistema () pode ser ser substituído por qualquer um dos sistemas seguintes formados pelos cilindros projetantes da curva: { 3x + y = 3 x + z = 4, (6) { 3x + y = 3 3z y = 9, (7) { x + z = 4 3z y = 9. (8) 1. Construção geométrica da curva formada pela interseção de seus cilindros projetantes Para traçar a curva de interseção de dois cilindros projetantes não é necessário desenhar os cilindros completos, basta apenas desenhar as curvas diretrizes de cada cilindro nos planos coordenados correspondentes e através de segmentos paralelos aos eixos coordenados obter cada ponto da curva de interseção. Para exemplificar, considere os dois cilindros projetantes { y = x y + z = 4. (9) Inicialmente, desenhamos cada cilindro separadamente e em seguida construímos a curva de interseção dos dois cilindros: (a) Cilindro parabólico y = x (Figura ). Note que no plano xy temos a parábola y = x. (b) Cilindro circular y + z = 4 (Figura 3). Note que no plano yz temos a circunferência y + z = 4. (c) Vamos agora desenhar os dois cilindros conjuntamente no mesmo sistema de coordenadas (Figuras 4 e 5). (d) Vamos agora traçar a curva de interseção dos dois cilindros e para isso necessitamos apenas das curvas diretrizes nos respectivos planos coordenados (Figura 6). Depois de obter a curva de interseção podemos então desenhar os cilindros para termos uma visualização completa dos destes e da curva de interseção. Para simplificar a obtenção da curva de interseção adotaremos sempre o primeiro octante para efetuarmos o traçado. Para os outros octantes o procedimento é o mesmo. Além disso, por simetria, podemos sempre inferir qual será a curva completa.
6 6 Figura : Figura 3:

7 7 Figura 4: Figura 5:
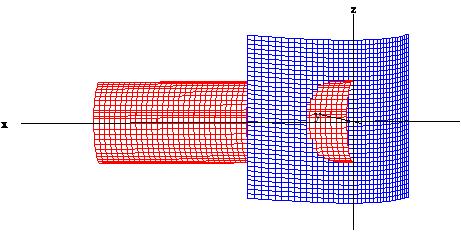
8 8 Figura 6: Claramente os pontos A e B pertencem a curva de interseção mas também podem ser obtidos usando-se a técnica geral de construção da curva de interseção que vamos agora descrever. Vamos tomar um ponto P qualquer de uma das curvas e através de segmentos paralelos aos eixos coordenados ir de encontro a um ponto da outra curva. Na Figura 7 partimos do ponto P da curva z + y = 4 e vamos de encontro ao ponto Q da curva y = x. Para isso, traçamos inicialmente o segmento P M paralelo ao eixo z e em seguida o segmento MQ paralelo ao eixo x. O ponto C (Figura 8) da curva de interseção dos dois cilindros é agora obtido através da interseção da reta r que passa pelo ponto Q e é paralela ao segmento P M com a reta s que passa pelo ponto P e é paralela ao segmento QM. Utilizando este mesmo procedimento com vários pontos obtemos a curva de interseção (Figura 9) Exemplos 1. Obter a curva de interseção dos cilindros x + y = 1 e x + z = 1. Vamos apenas desenhar as curvas diretrizes nos planos coordenados somente no primeiro octante e, através do processo descrito acima, encontrar a curva de interseção dos cilindros (Figura 10). A seguir, representamos no primeiro octante o desenho completo da interseção dos dois cilindros (Figura 11).. Determinar dois cilindros projetantes da curva gerada pela interseção das superfícies dadas abaixo e obter um desenho da curva de interseção das superfícies, no primeiro octante, do sistema 0x, 0y e 0z. { 7x + 14y + 63z 8y = 63 6x + 3y 7z 4y + 7 = 0. (10) Para obter os cilindros projetantes devemos trabalhar com as equações de modo a eliminar sucessivamente as variávieis x, y e z. Para melhor trabalhar com as equações, observe que
9 9 Figura 7: podemos simplificá-las um pouco, dividindo a primeira equação por 7 e a segunda por 3. Fazendo isso temos: { x + y + 9z 4y = 9 6x + y 9z 8y = 9. (11) Observe que facilmente podemos eliminar a variável z somando as duas equações acima 3x + 3y 1y = 0. (1) Para eliminar a variável x, multiplicamos a primeira equação por e subtraímos a segunda equação da primeira, { x + 4y + 18z 8y = 18 x + y 9z 8y = 9. Obtemos, 3y + 7z = 7. (13) Observe que neste caso não vamos conseguir eliminar facilmente a variável y, mas como já temos as equações (1) e (13) de dois cilindros projetantes, vamos usá-las para obter a curva de interseção.
10 10 Figura 8: Note que na equação 3x + 3y 1y = 0 temos y e y. Logo, devemos completar os quadrados de modo a obter uma equação mais simples para podermos identificar a curva e fazer seu desenho. Ou seja, 3x + 3y 1y = 0 x + y 4y = 0 x + y 4y = 0 x + ( y 4y + 4 ) 4 = 0 x + ( y 4y + 4 ) = 4 x + (y ) = 4 Portanto, obtemos os cilindros projetantes, x + (y ) = 4, que é um cilindro circular e (14) y 9 + z = 1, que é um cilindro elíptico. (15)
11 11 Figura 9: Figura 10:
. 3. Aplicando o mesmo procedimento descrito acima, obter a curva de interseção dos cilindros, no primeiro octante, dados por: z = 1 y x + (y ) = 1 Note que neste caso devemos ter y > 0.")
12 1 Figura 11: Observe que o primeiro cilindro é gerado por uma circunferência de raio, no plano xy, com centro no ponto C(0, ) e o segundo cilindro é gerado por uma elipse, no plano yz, com semi-eixo maior 3 no eixo y e semi-eixo menor 1 no eixo z (Figura 1). 3. Aplicando o mesmo procedimento descrito acima, obter a curva de interseção dos cilindros, no primeiro octante, dados por: z = 1 y x + (y ) = 1 Note que neste caso devemos ter y > 0. As curvas estão representadas na Figura 13.
13 13 Figura 1: 1.. Exercícios 1. Determinar os cilindros projetantes e construir a curva dada pela interseção das superfícies no primeiro octante, quando for possível. Caso não seja possível no primeiro, escolha outro octante. (a) x + y + z = e x y z + 1 = 0 (b) x + y + z + z = 14 e x y z + 3z = 0 (c) 4x + y + z = 7 e x + y z + 1 = 0 (d) x 3y 3x + z = 0 e x + y + x + z = 0 (e) x + 3y + z = 1 e x y 3z + 4 = 0 (f) 3y + x + z = 1 e y x + z = 4 (g) y + 4z 3x = 4 e y z + x = 0 (h) y + 4z 3x = 4 e y z + x = 4 (i) x + y + 9z 4y = 9 e x + y 9z 8y + 9 = 0 (j) 180y + 9x + 4z = 180 sen x + 36 e 36y + 9x + 4z = 36 sen x + 36 (k) x y + 8z + 4y = 0 e x + y + 4z 4y = 0
14 14 Figura 13: 1.3 Equações Paramétricas Uma curva no espaço pode ser representada por três equações da forma x = f(t) y = g(t) z = h(t) (16) onde cada coordenada do ponto da curva depende de um parâmetro t. Convenciona-se usar a notação t para o parâmetro em virtude das equações paramétricas serem usadas na Física para representar o movimento de uma partícula em função do tempo. Mas, podemos usar outras notações para o parâmetro, como por exemplo θ e s, quando for conveniente. Se na primeira equação isolarmos o valor de t e substituimos este valor nas outras duas equações teremos as equações da curva na forma cartesiana, F (x, y) = 0 G(x, z) = 0. (17) Estas são as equações cartesianas dos cilindros projetante da curva (16) Exemplo Fazer um desenho da curva x = 1 y = t. (18) z = t
15 15 Para fazer o esboço da curva podemos proceder de dois modos: 1. Determinamos cada ponto da curva atribuindo valores ao parâmetro t, como na tabela abaixo. t x y z Marcamos cada um dos pontos no sistema tridimensional P 1 (1, 4, 16), P (1, 3, 9), P 3 (1,, 4), P 4 (1, 1, 1), P 5 (1, 0, 0), P 6 (1, 1, 1), P 7 (1,, 4), P 8 (1, 3, 9), P 9 (1, 4, 16), como na Figura 14. Figura 14: Em seguida unimos os pontos para visualizarmos a curva (Figura 15). É claro que quanto mais pontos tivermos mais preciso será o traçado da curva. As equações paramétricas são ideais para fazermos traçados de curvas no computador pois o computador pode calcular em pouquíssimo tempo uma grande quantidade de parâmetros e pontos da curva.. Outra maneira é passar as equações paramétricas para a forma de equações cartesianas, respectivamente, como dadas abaixo,
16 16 Figura 15: x = 1 y = t, (19) z = t { x = 1 z = y. (0) Logo, temos uma parábola em cima do plano x = 1. Ou seja, é a projeção da parábola de equação z = y do plano yz sobre o plano x = 1 (Figura 15) Equações paramétricas de algumas curvas 1. Circunferência com Centro C(x 0, y 0 ) e raio r no plano:. Elipse com centro C(x 0, y 0 ) e semi-eixos a e b no plano: { x(θ) = x0 + r cos θ y(θ) = y 0 + r sen θ. (1) { x(θ) = x0 + a cos θ y(θ) = y 0 + b sen θ. ()
 Passando para coordenadas cartesianas temos { x + y = 4 z = 3.")
17 17 3. Reta com vetor diretor v = (a, b, c) passando pelo ponto P (x 0, y 0, z 0 ) no espaço: x(t) = x 0 + at y(t) = y 0 + bt z(t) = z 0 + c(t). (3) Exemplos 1. Desenhe a curva x = cos θ y = sen θ z = 3. (4) Passando para coordenadas cartesianas temos { x + y = 4 z = 3. (5) Portanto, a curva é uma circuferência em cima do plano z = 3 e a projeção dessa curva no plano xy é a circunferência x + y = 4 (Figura 16). Figura 16:
18 18. Desenhe a curva x = y = cos θ z = sen θ. (6) Portanto, temos uma cir- Observe que a curva no plano yz é uma circuferência de raio. cuferência de raio em cima do plano x = (Figura 17). Figura 17: 3. Desenhe a curva x = y = cos θ z = 3 sen θ. (7) 1.4 Equação vetorial das curvas Uma curva pode ser determinada pelo vetor posição de cada ponto da curva. Neste caso, cada ponto da curva será dado por um vetor cuja extremidade se encontra nesse ponto. Uma equação vetorial é da forma, r(t) = x(t) i + y(t) j + z(t) k. (8)
19 Exemplos 1. Desenhar a curva r(t) = (t + ) i + (t 4) j + (1 t) k. Para cada valor de t teremos um vetor que indicará um ponto da curva, como na tabela abaixo. t r(t) 0 i 4 j + k 1 i 6 j + k 1 3 i j 8 j + 3 k 4 i 1 k (9) Para obter a curva, representamos os vetores no espaço, localizamos a extremidade de cada vetor e unimos os pontos das extremidades (Figura 18). Figura 18: Assim como no caso da equações paramétricas, necessitamos um grande número de vetores
20 0 para traçarrmos a curva. Podemos ter uma idéia da curva passando a equação vetorial para equações paramétricas e daí para equações cartesianas. Deste modo podemos usar todo o nosso conhecimento anterior. Com a equação vetorial r(t) = (t + ) i + (t 4) j + (1 t) k, obtemos as equações paramétricas x(t) = + t y(t) = 4 + t z(t) = 1 t que possuem vetor diretor v = (1, 1) e ponto P (, 4, 1) (Figura 19).. (30) Figura 19:. Seguindo o mesmo procedimento do exemplo anterior, desenhe a curva r(t) = cos(t) i + sen (t) j + 4 k Exercícios 1. Escrever as equações paramétricas das seguintes curvas: (a) x + y + z = 16 e z =,
21 1 (b) x + y + z = 9 e y = x, (c) x + y = 1 e y = z, (d) x + y + z = e x y z + 1 = 0, (e) x + y = 4 e x + y z = 0.. Desenhar a curva x = 4 cos t, y = 9 sen t, z = Desenhar a curva x = t, y = 0, z = e t. 4. Escrever a equação cartesiana da curva x = cos t, y = sen t, z = cos t + sen t. 5. Construir a curva cujas equações vetoriais são dadas abaixo: (a) r(t) = ( t 3) i + (t 4) j + (4t 7) k, (b) r(t) = t i + 4t j + t k, (c) r(t) = cos θ i + cos θ j + sen θ k, (d) r(t) = 4 sen θ i + cos θ j + sen θ k. 6. Fazer o desenho, no primeiro octante, da curva cujas equações paramétrica são dadas por x = 4 sen t + 6 y = 6 cos t. z = 4 sen t 7. Determine a equação vetorial que representa a curva de intersecção das superfícies x + y = 1 e y + z =. Faça um esboço da curva. 8. Parametrize a curva de intersecção das superfícies dadas an seguir: (a) (b) { x = y + z x + y + z =, { x + z = 4 y = 9 x 4z. 9. Represente no primeiro octante a curva cuja equação vetorial é dada abaixo: (a) r(t) = (t, t, cos t), (b) r(t) = (3 1 cos t, 3 sen t, cos t).
22 SISTEMAS DE COORDENADAS.1 Coordenadas polares no R Fonte: Cálculo A. Funções. Limite. Derivação. Integração. Diva Marília Flemming. Mírian Buss Gonçalves. Até o presente momento, localizamos um ponto no plano por meio de suas coordenadas cartesianas retangulares. Existem outros sistemas de coordenadas. Um sistema bastante utilizado é o sistema de coordenadas polares. No sistema de coordenadas polares, as coordenadas consistem de uma distância e da medida de um ângulo em relação a um ponto fixo e a uma semireta fixa. A Figura 1 ilustra um ponto P num sistema de coordenadas polares. O ponto fixo, denotado por O, é chamado pólo ou origem. A semireta fixa OA é chamada. O ponto P fica bem determinado através do par ordenado (r, θ), onde r representa a distância entre a origem e o ponto P, e θ representa a medida, em radianos, do ângulo orientado AOP. O segmento OP, muitas vezes, é chamado raio. P Pólo r ou origem θ O A Figura 1 Usaremos as seguintes convenções: (i) Se o ângulo AOP for descrito no sentido anti-horário, então θ > 0. Caso contrário, teremos θ < 0. (ii) Se r < 0, o ponto P estará localizado na extensão do lado terminal do ângulo (iii) O par ordenado (0, θ), θ qualquer, representará o pólo. AOP..1.1 Exemplo 1. Representar num sistema de coordenadas polares os seguintes pontos: (a) P 1 (, /4) (b) P (, /4) (c) P 3 (, /4) (d) P 4 (, /4) As Figuras (a) e (b), representam os pontos P 1 e P, respectivamente. P 1 r = θ = 4 O (a) r = P Figura θ = 4 O (b)
23 3 As Figuras 3 (a) e 3 (b), mostram os pontos P 3 e P 4, respectivamente. P 3 r = O θ = 4 O θ = 4 r = (a) (b) P 4 Figura 3.1. Relação entre o Sistema de Coordenadas Cartesianas Retangulares e o Sistema de Coordenadas Polares. Em várias situações, surge a necessidade de nos referirmos a ambas, coordenadas cartesianas e coordenadas polares de um ponto P. Para visualizar isto, fazemos a origem do primeiro sistema coincidir com o pólo do segundo sistema, o com o eixo positivo dos x e o raio para o qual θ = / com o eixo positivo dos y (ver Figura 4). Y O θ = A X Figura 4 Supondo que P seja um ponto com coordenadas cartesianas (x, y) e coordenadas polares (r, θ), vamos analisar o caso em que o ponto P está no primeiro quadrante. A Figura 5 (a) e (b) ilustra o caso para r > 0 e r < 0, respectivamente.
24 4 Y Y y P r θ x (a) X -x y θ -y P (b) x X Figura 5 Podemos observar que: (i) Para r > 0, temos cos θ = x r e sen θ = y r. (ii) Para r < 0, temos cos θ = x y e sen θ =. r r Portanto, { x = r cos θ y = r sen θ. (31) Pode-se verificar a validade das relações encontradas, no caso em que o ponto P se encontra sobre um dos eixos ou num outro quadrante. Usando (31), podemos deduzir outra relação muito usada. Elevando ambos os membros das equações em (31) ao quadrado, podemos escrever { x = r cos θ y = r sen θ. Adicionando membro a membro, obtemos: x + y = r cos θ + r sen θ ou x + y = r. Portanto, r = ± x + y. (3)
25 5.1.3 Exemplos 1. Encontrar as coordenadas cartesianas do ponto cujas coordenadas polares são ( 4, 7/6). Y Solução. A Figura 6 ilustra este ponto. Temos, x = r cos θ e y = r sen θ = 4 cos ( 7 6 ) = 4 sen 7 ) 6 = 4 3 = 4 ( 1 = 3 =. Portanto, ( 3, ) são as coordenadas cartesianas do ponto dado. y 7 6 P x X Figura 6. Encontrar (r, θ), supondo r < 0 e 0 θ < para o ponto P, cujas coordenadas cartesianas são ( 3, 1). Y Solução. A Figura 7 ilustra o ponto P. r = x + y = = ; cos θ = x r = 3 = 3 sen θ = y r = 1 = 1. Portanto, θ = 5 6. e P X Figura Gráficos de Equações em Coordenadas Polares. O gráfico de F (r, θ) = 0 é formado por todos os pontos cujas coordenadas polares satisfazem a equação. É comum apresentarmos a equação numa forma explícita, isto é, r = f(θ). Na prática, os seguintes procedimentos poderão nos auxiliar no esboço do gráfico: (i) calcular os pontos de máximo e/ou mínimos; (ii) encontrar os valores de θ para os quais a curva passa pelo pólo; (iii) verificar simetrias. Se, a equação não se altera quando substituirmos r por r, existe simetria em relação à origem; a equação não se altera quando substituirmos θ por θ, existe simetria em relação ao eixo polar;
26 6 a equação não se altera quando substituirmos θ por θ, existe simetria em relação ao eixo θ =..1.5 Exemplos 1. Esboçar a curva r = (1 cos θ). Como a equação não se altera ao substituirmos θ por θ, isto é r = (1 cos θ) = (1 cos( θ)), concluímos que existe simetria em relação ao. Logo, basta analisar valores de θ tais que 0 θ. Para 0 θ, encontramos um ponto de máximo (4, ) e um ponto de mínimo (0, 0). Observamos que, considerando r = f(θ), os pontos de máximos e mínimos podem ser encontrados de maneira análoga aos da Seção 5.7 (Cálculo A). A Tabela 1 mostra alguns pontos da curva, cujo esboço é mostrado na Figura 8. Tabela 1 θ r Figura 8. Esboçar a curva r = cos θ. Analisando as simetrias, temos que (a) A curva é simétrica em relação ao eixo dos x, pois r = cos( θ) = cos θ. (b) A curva é simétrica em relação ao eixo dos y, pois r = cos[( θ)] = cos( θ) = cos θ. Logo, basta fazer uma tabela para 0 θ. Em 0 θ, a curva passa pelo pólo quando θ = 4, pois r = f ( ) 4 = cos 4 = cos = 0. Podemos ainda verificar que, para 0 θ, temos um ponto de máximo (, 0) e um ponto de mínimo (, /). Usando a Tabela e os resultados anteriores, esboçamos a curva vista na Figura 9. Tabela θ r θ = θ = 3 θ = 4 θ = 6 θ = 0 Figura 9
27 7.1.6 Algumas Equações em Coordenadas Polares e seus respectivos Gráficos. (I) Equações de retas. (a) θ = θ 0 ou θ = θ 0 ± n, n Z é uma reta que passa pelo pólo e faz um ângulo de θ 0 ou θ 0 ± n radianos com o (ver Figura 10). θ 0 O A Figura 10 (b) r sen θ = a e r cos θ = b, a, b R, são retas paralelas aos eixos polar e /, respectivamente (ver Figuras 11 e 1). a A A [r sen θ = a, a > 0] Figura 11 a [r sen θ = a, a < 0] b A b A [r cos θ = b, b > 0] (II) Circunferências. Figura 1 [r cos θ = b, b < 0] (a) r = c, c R é uma circunferência centrada no pólo e raio c (ver Figura 13). o A Figura 13
28 8 (b) r = a cos θ é uma circunferência de centro no, tangente ao eixo θ = /: se a > 0, o gráfico está à direita do pólo; se a < 0, o gráfico está à esquerda do pólo (ver Figura 14). P (r, θ) θ 0 (a, 0) A [r = a cos θ, a > 0] a A [r = a cos θ, a < 0] Figura 14 (c) r = b sen θ é uma circunferência de centro no eixo / e que tangencia o : se b > 0, o gráfico está acima do pólo; se b < 0, o gráfico está abaixo do pólo (ver Figura 15). b 0 A A [r = b sen θ, b > 0] b [r = b sen θ, b < 0] Figura 15 (III) Limaçons. r = a ± b cos θ ou r = a ± b sen θ, onde a, b R são limaçons. Temos, se b > a, então o gráfico tem um laço (ver Figura 16);
29 9 r = a + b cos θ r = a b cos θ r = a + b sen θ r = a b sen θ Figura 16 se b = a, então o gráfico tem o formato de um coração, por isso é conhecido como Cardióide (ver Figura 17); r = a(1 + cos θ) r = a(1 cos θ) r = a(1 + sen θ) Figura 17 r = a(1 sen θ)
30 30 se b < a, então o gráfico não tem laço (ver Figura 18). r = a + b cos θ r = a b cos θ r = a + b sen θ r = a b sen θ (IV) Rosáceas. Figura 18 Observamos que na Figura 16 usamos a = 1 e b =, na Figura 17 usamos a = b = 1 e na Figura 18 usamos a = 3 e b =. r = a cos nθ ou r = a sen nθ, onde a R e n ℵ são rosáceas: se n é par temos uma rosácea de n pétalas (ver Figura 19); r = a cos nθ Figura 19 r = a sen nθ se n é ímpar temos uma rosácea de n pétalas (ver Figura 0).
31 31 r = a sen nθ Figura 0 r = a cos nθ Observamos que na Figura 19 usamos a = 1 e n = 4, na Figura 0 usamos a = 1 e n = 5. (V) Lemniscatas. r = ±a cos θ ou r = ±a sen θ, onde a R são lemniscatas (ver Figura 1). θ = 3 4 θ = 4 θ = 3 4 θ = 4 r = a cos θ r = a cos θ r = a sen θ Figura 1 r = a sen θ Observamos que na Figura 1 usamos a = 1.
32 3 (IV) Espirais. As equações seguintes representam algumas espirais: (a) rθ = a, a > 0 espiral hiperbólica; (b) r = aθ, a > 0 espiral de Arquimedes; (c) r = e aθ espiral logarítmica; (d) r = θ espiral parabólica. As Figuras a 5 ilustram estas espirais. (a, ) (a, ) rθ = a (θ > 0) Figura rθ = a (θ < 0) Figura 3 r = aθ (θ 0) r = e aθ Figura 4 r = θ Figura 5 r = θ
33 Exercícios 1. Demarcar os seguintes pontos no sistema de coordenadas polares. (a) P 1 (4, /4) (b) P (4, /4) (c) P 3 ( 4, /4) (d) P 4 ( 4, /4). Demarcar os seguintes pontos no sistema de coordenadas polares e encontrar suas coordenadas cartesianas. (a) P 1 (3, /3) (b) P ( 3, /3) (c) P 3 (3, /3) (d) P 4 ( 3, /3) 3. Encontrar as coordenadas cartesianas dos seguintes pontos dados em coordenadas polares. (a) (, /3) (b) (4, 5/8) (c) (3, 13/4) (d) ( 10, /) (e) ( 10, 3/) (f) (1, 0) 4. Encontrar um par de coordenadas polares dos seguintes pontos: (a) (1, 1) (b) ( 1, 1) 5. Usar (a) r > 0 e 0 θ < ; (b) r < 0 e 0 θ < ; (c) ( 1, 1) (d) (1, 1) (c) r > 0 e < θ 0; (d) r < 0 e < θ 0; para descrever os pontos P 1 ( 3, 1) e P (, ), em coordenadas polares. 6. Identificar e transformar as seguintes equações para coordenadas polares. (a) x + y = 4 (b) x = 4 (c) y = (d) y + x = 0 (e) x + y x = 0 (f) x + y 6y = 0 7. Transformar as seguintes equações para coordenadas cartesianas e identificá-las. (a) r = cos θ (b) r = sen θ (c) r = 1 cos θ+ sen θ (d) r = a, a > Nos exercícios a seguir esboçar o gráfico das curvas em coordenadas polares. (a) r = 1 + cos θ (b) r = 1 sen θ (c) r = a ± b cos θ, a = e b = 3; a = 3 e b = ; a = b = 3 (d) r = cos 3θ (e) r = cos 3θ (f) r = sen θ (g) r = cos θ (h) r = sen θ (i) r = a ± b sen θ, a = e b = 3; a = 3 e b = ; a = b = (j) r = sen 3θ
34 34 (k) θ = /4 (l) θ = /9 (m) r = 4 cos θ (n) r = 3θ, θ 0 (o) r = 4 sen θ (p) r = e θ, θ 0 (q) r = (r) r = 10 cos θ (s) r = cos θ (t) r = 1 sen θ (u) r = e θ/3 (v) r = θ (w) r cos θ = 5 (x) 5r cos θ = Respostas (a) (3/, 3 3/) (b) ( 3/, 3 3/) (c) (3/, 3 3/) (d) ( 3/, 3 3/) (3a) (1, 3) (3b) ( , ) (3c) ( 3 /, 3 /) (3d) (0, 10) (3e) (0, 10) (3f) (1, 0) (4a) (, /4) (4b) (, 3/4) (4c) (, 5/4) (4d) (, 7/4) (5a) P 1 (, 11/6); P (, 5/4) (5b) P 1 (, 5/6); P (, /4) (5c) P 1 (, /6); P (, 3/4) (5d) P 1 (, 7/6); P (, 7/4) (6a) r = ± (6b) r cos θ = 4 (6c) r sen θ = (6d) θ = 3 + k, k Z 4 (6e) r = cos θ (6f) r = 6 sen θ (7a) x + y x = 0 (7b) x + y y = 0 (7c) x + y = 1 (7d) x + y = a. Coordenadas polares no R 3 Fonte:Geometria Analítica. Coleção Schaum. Joseph H. Kindle. Z No espaço, além das coordenadas cartesianas retangulares, três outros sistemas são freqüentemente empregados: os de coordenadas polares, cilíndricas e esféricas. As coordenadas polares do ponto P no espaço, Fig. 1, são (r, α, β, γ), onde r, raio vetor, designa a distância OP e α, β e γ são ângulos diretores de OP. As relações entre coordenadas polares e retangulares do ponto P são γ r β O α X Figura 1 P (x, y, z) (r, α, β, γ) Y
35 35 x = r cos α y = r cos β z = r cos γ. (33) r = ± x + y + z, cos α = x r, cos β = y r, cos γ = z r, r 0. (34) Uma vez que cos α + cos β + cos γ = 1, as quatro coordenadas não são independentes. Por exemplo, para α = 60 e β = 45, temos cos γ = 1 cos α cos β = = 1. Da condição 4 4 γ 180 deduz-se: γ = 60 ou Coordenadas cilíndricas No sistema de coordenadas cilíndricas, um ponto P (x, y, z), Fig., é localizado pelas coordenadas r, θ, z, devendo-se notar que r e θ são as coordenadas polares da projeção Q do ponto P no plano xy. Para designar essas coordenadas, escrevemos: (r, θ, z). As relações entre coordenadas cilíndricas e retangulares são Z P (x, y, z) P (r, θ, z) z O θ r X Figura Y x = r cos θ y = r sen θ z = z. (35) r = ± x + y, θ = arctan y x. (36) O ângulo θ não sofre restrição de valor, podendo r receber valores negativos, como em coordenadas polares..4 Coordenadas esféricas Seja P (x, y, z) um ponto qualquer do espaço e Q, sua projeção no plano xy. Chamemos de r a distância OP, como em coordenadas polares. Designemos o ângulo ZOP por φ. Consideremos o ângulo φ como positivo e capaz de variar no 0 φ 180. Designemos o ângulo XOQ por θ. Os símbolos r, θ e φ tomam o nome de coordenadas esféricas do ponto P e representam-se por P (r, θ, φ); r é o raio vetor, θ é a longitude e φ é a co-latitude de P. O ângulo θ pode receber qualquer valor. Do triângulo retângulo OP Q, deduzimos OQ = r sen φ, QP = r cos φ. (37)
36 36 Z r P (x, y, z) P (r, θ, φ) φ O θ M Q X Figura 3 Y Do triângulo retângulo OM Q tiramos OM = OQ cos θ, MQ = OQ sen θ. Portanto, x = OM = r sen φ cos θ y = MQ = r sen φ sen θ z = QP = r cos φ. (38) r = ± x + y + z, θ = arctan y x, φ = arccos z r. (39) Nos problemas que envolvem a determinação de áreas e volumes pelo cálculo, o trabalho muito se simplifica com o emprego de coordenadas cilíndricas ou esféricas. As coordenadas cilíndricas mostram-se particularmente úteis quando a superfície limite é de revolução..5 Exemplos 1. Determinar as coordenadas polares, cilíndricas e esféricas do ponto de coordenadas retangulares (1,, ). Solução Coordenadas polares. r = x + y + z = 1 + ( ) + = 9 = 3. α = arccos x r = arccos 1 3 = 70 3, ) β = arccos y r ( = arccos 3 = , γ = arccos z r = arccos 3 = Resposta: (3, 70 3, , ). Coordenadas cilíndricas. r = x + y = 1 + ( ) = 5. θ = arctan y x = arctan = 96 34, z =. Resposta: ( 5, 96 34, ). Coordenadas esféricas. r = x + y + z = 1 + ( ) + = 9 = 3. θ = arctan y x = arctan = 96 34, φ = arccos z r = arccos 3 = 48 11, Resposta: (3, 96 34, ).. Determinar as coordenadas cartesianas ortogonais do ponto, cujas coordenadas cilíndricas são (6, 10, ).
37 37 Solução. x = r cos θ = 6 cos 10 = 3, y = r sen θ = 6 sen 10 = 3 3, z =. Resposta: ( 3, 3 3, ). 3. Determinar as coordenadas retangulares do ponto de coordenadas esféricas (4, 45, 30 ). Solução. x = r sen φ cos θ = 4 sen 30 cos( 45 ) =, y = r sen φ sen θ = 4 sen 30 sen ( 45 ) =, z = r cos φ = 4 cos 30 = 3. Resposta: (,, 3). 4. Determinar as coordenadas cartesianas do ponto, cujas coordenadas polares são (3, 10, 10, 135 ). Solução. x = r cos α = 3 cos 10 = 3, y = r cos β = 3 cos 10 = 3, z = r cos γ = 3 cos 135 = 3 ( ) Resposta: 3, 3, Determinar as coordenadas cartesianas, polares e esféricas de um ponto, cujas coordenadas cilíndricas são (6, 10, 4). Solução Retangulares. x = r cos θ = 6 cos 10 = 3, y = r sen θ = 6 sen 10 = 3, z = 4. Resposta: ( 3, 3 3, 4). Polares. r = x + y + z = ( 3) + (3 3) + 4 = 13. α = arccos x r = arccos 3 13 = , β = arccos y r = arccos = 46 7, γ = arccos z r = arccos 4 13 = Resposta: ( 13, , 46 7, ). Esféricas. r = x + y + z = θ = arctan y x = arctan = 10, φ = arccos z r = arccos 4 13 = 56 19, Resposta: ( 13, 10, ). ( 3) + (3 3) + 4 = 13
38 38 6. Passar a equação x + y + z x 3y z + = 0 para coordenadas cilíndricas. Solução. Empreguemos as fórmulas x = r cos θ, y = r sen θ e z = z. Substituindo, na equação dada, x, y e z pelos valores acima, vem r cos θ + r sen θ + z r cos θ 3r sen θ z + = 0. Simplificando, resulta r r( cos θ + 3 sen θ) + z z + = Passar a equação x + 3y 6z = 0 para coordenadas esféricas. Solução. Empreguemos as fórmulas x = r sen φ cos θ, y = r sen φ sen θ e z = r cos φ. Substituindo, temos r sen φ cos θ + 3r sen φ sen θ 6r cos φ = 0 ou r sen φ cos θ + 3r sen φ sen θ 6 cos φ = Exprimir a equação r + 6 sen φ cos θ + 4 sen φ sen θ 8 cos φ = 0, em coordenadas retangulares. Solução. A equação dada está expressa em coordenadas esféricas. Podemos Multiplicá-la por r. Empregando os valores de x, y, z, dados no problema 7, obtemos r + 6r sen φ cos θ + 4r sen φ sen θ 8r cos φ = 0, ou x + y + z + 6x + 4y 8z = 0. Esta é a equação de uma esfera com centro em ( 3,, 4) e raio r = Reduzir a equação z = r cos θ, expressa em coordenadas cilíndricas, a coordenadas cartesianas ortogonais. Solução. Façamos cos θ = cos θ sen θ. Teremos então z = r (cos θ sen θ) = r cos θ r sen θ. Como r cos θ = x e r sen θ = y, a equação pedida é z = x y. 10. Transformar x + y z = 5 em uma equação do sistema polar. Solução. Em coordenadas polares, temos x = r cos α, y = r cos β, z = r cos γ. Portanto, a equação se transforma em r cos α + r cos β r cos γ = 5 ou r (cos α + cos β cos γ) = 5. Como cos α + cos β + cos γ = 1, a equação pedida é r (1 cos γ) = Passar a equação cos γ = r cos α cos β, expressa em coordenadas polares, para o sistema cartesiano ortogonal. Solução. Multipliquemos ambos os membros da equação dada por r. Teremos r cos γ = r cos α cos β. Como r cos γ = z, r cos α = x e r cos β = y, a equação pedida é z = xy..6 Exercícios 1. Determinar as coordenadas polares dos seguintes pontos: (a) (0, 1, 1) (b) (0,, ) (c) (1,, ) (d) (6, 3, ) (e) (8, 4, 1). Determinar as coordenadas cilíndricas dos pontos do problema 1.
39 39 3. Determinar as coordenadas esféricas do problema1. 4. Determinar as coordenadas retangulares dos pontos, cujas coordenadas polares são: (a) (, 90, 30, 60 ) (b) (3, 60, 45, 10 ) (c) (4, 10, 10, 135 ) (d) (3, 150, 60, 90 ) (e) (, 45, 10, 60 ) 5. Determinar as coordenadas ortogonais dos pontos, cujas coordenadas cilíndricas são: (a) (6, 10, ) (b) (1, 330, ) (c) (4, 45, ) (d) (8, 10, 3) (e) (6, 30, 3) 6. Determinar as coordenadas retangulares dos pontos, cujas coordenadas esféricas são: (a) (4, 10, 30 ) (b) (3, 10, 40 ) (c) (6, 330, 60 ) (d) (5, 150, 10 ) (e) (, 180, 70 ) 7. Determinar as coordenadas esféricas dos pontos, cujas coordenadas cilíndricas são: (a) (8, 10, 6) (b) (4, 30, 3) (c) (6, 135, ) (d) (3, 150, 4) (e) (1, 90, 5) 8. Transformar as seguintes equações nas correspondentes do sistema esférico. (a) 3x 3y = 8z (b) x y z = a (c) 3x + 5y z = 6 9. Transformar as coordenadas retangulares das equações dadas em coordenadas cilíndricas: (a) 5x + 4y = 0 (b) 5x 4y + x + 3y = 0 (c) x + y 8x = 0 (d) x y + y 6 = 0 (e) x + y z = a 10. As superfícies dadas por suas equações estão expressas em coordenadas cilíndricas. Referí-las ao sistema cartesiano ortogonal e identificá-las. (a) r + 3z = 36 (b) r = a sen θ (c) r + z = 16 (d) θ = 45 (e) r z = Referir ao sistema polar os lugares das seguintes equações cartesianas. (a) x + y + 4z = 0 (c) x +3y +z 6x +y = 0 (b) x + y z = a (d) z = xy 1. Transformar as seguintes equações, dadas em coordenadas esféricas, em equações de coordenadas retangulares e identificá-las. (a) r = 5a cos φ (c) r sen φ = a (b) θ = 60 (d) r = Transformar as seguintes equações polares em equações cartesianas retangulares: (a) r(cos α + cos β + cos γ) = 5 (b) r ( cos α 1) = 5 (c) cos γ = r(cos α cos β) (d) r r cos γ 4r cos γ = 0
40 40.7 Respostas (8a) 3r sen φ cos θ = 8 cos θ (8b) r ( sen φ cos θ cos φ) = a (8c) r(3 sen φ cos θ + 5 sen φ sen θ cos φ) = 6 (9a) θ = arctan( 5/4) (9b) 5r cos θ 4r sen θ + cos θ + 3 sen θ = 0 (9c) r 8 cos θ = 0 (9d) r cos θ + r sen θ 6 = 0 (9e) r z = a (10a) x + y + 3z = 36. Elipsóide de revolução. (10b) x + y = ay. Cilindro circular reto. (10c) x + y + z = 16. Esfera. (10d) y = x. Plano. (10e) x + y z = 1. Hiperbolóide de uma folha. (11a) r(cos α + cos β) + 4 cos γ = 0 ou r(1 cos γ) + 4 cos γ = 0 (11b) r (1 cos γ) = a (11c) r( + cos β) 6 cos α + cos β = 0 (11d) cos γ = r cos α cos β (1a) x + y + z = 5az (1b) y = 3x (1c) x + y = a (1d) x + y + z = 16 (13a) x + y + z = 5 (13b) x y z = 5 (13c) z = x y (13d) x + y 4z = 0
41 41 3 TRANSFORMAÇÃO DE COORDENADAS Fonte:Geometria Analítica. Charles H. Lehmann. Um dos principais objetivos da Geometria Analítiva é a determinação das propriedades de várias curvas e configurações geométricas. Sobre a base de alguns conceitos fundamentais já fizemos um estudo da linha reta e da circunferência. Naturalmente esperamos continuar esta investigação relativamente a outras curvas. Entretanto, a medida que progredirmos em nosso trabalho, verificaremos que as curvas e suas equações se tornam mais complicadas e mais difíceis de serem analisadas. Em consequência torna-se expediente, em várias ocasiões, introduzir novos recursos a fim de facilitar o estudo destas curvas. Assim, nesta altura, é conveniente introduzir a noção de transformação de coordenadas, um recurso que nos possibilita simplificar as equações de muitas curvas. Uma transformação é o processo de mudar uma relação, expressão ou figura em outra. Uma tranformação é uma operação por meio da qual uma relação, expressão ou figura é mudada em outra de acordo com uma dada lei. Analiticamente a lei dada é expressa por uma ou mais equações denominadas equações de transformação. Transformação de coordenadas. Consideremos uma circunferência de raio r cuja equação é dada na forma padrão Y O Y P O (h,k) X X (x h) + (y k) = r (40) onde as coordenadas (h, k) do centro O são ambas diferentes de zero (Fig. 1). Se esta circunferência é mudada, a qualquer respeito, sendo colocada com seu centro na origem O, sua equação assume a forma canônica mais simples x + y = r. (41) Figura 1 Mas o mesmo efeito pode ser produzido sem mover a figura. Em vez disso, podemos mover os eixos coordenados paralelamente a si mesmos, respectivamente, no plano coordenado de maneira que a origem O coincida com o centro O (h, k) da circunferência e os eixos coordenados tomam as posições paralelas designadas pelos novos eixos X e Y na Fig. 1. Seja P qualquer ponto sobre a circunferência. As coordenadas de P são (x, y) quando referidas aos eixos originais X e Y, mas evidentemente, são diferentes quando referidas aos novos eixos X e Y. Sejam designadas por (x, y ) as novas coordenadas de P. Então a equação da circunferência referida aos novos eixos X e Y é dada pela forma canônica simples x + y = r. (4) Vemos, então, que movendo os eixos coordenados paralelamente a si mesmos, respectivamente, transformamos as coordenadas (x, y) de um ponto qualquer sobre a circunferência nas coordenadas (x, y ) e, como consequência, transformamos a equação (40) na forma (4) mais simples. A operação de mover os eixos coordenados no plano coordenado para uma posição diferente de maneira que os
42 4 novos eixos sejam paralelos aos antigos eixos, semelhante e respectivamente orientados, é denominada translação dos eixos coordenados. Veremos mais adiante que algumas equações podem ser transformadas para formas mais simples por uma rotação dos eixos coordenados em torno de sua origem como ponto fixo. 3.1 Translação de eixos coordenados. A fim de simplificar equações por translação dos eixos coordenados necessitaremos do seguinte teorema. Teorema 1. Se os eixos coordenados são transladados para uma nova origem O (h, k) e se as coordenadas de qualquer ponto P antes e depois da translação são (x, y) e (x, y ), respectivamente, então as equações de transformação das antigas para as novas coordenadas são dadas por { x = x + h y = y + k Demonstração. Os antigos eixos X e Y e os novos eixos transladados X e Y estão representados na Fig. onde as coordenadas da nova origem O são (h, k) em relação aos antigos eixos. Desde o ponto P são traçadas perpendiculares a ambos os conjuntos de eixos e os novos eixos estão prolongados até interceptarem os antigos eixos, dando-nos assim todos os pontos apresentados na figura. Y F B Y E O (h,k) P C X (43) Usando a relação fundamental para segmentos retilíneos orientados, temos de imediato, por meio da figura x = OD = OA + AD = OA + O C = h + x. (44) Semelhantemente O A D X y = OF = OB + BF = OB + O E = k + y. (45) Figura Exemplos 1. Transformar a equação x 3 3x y + 3x + 4y 5 = 0 (46) por translação dos eixos coordenados à nova origem (1, ). Desenhar o lugar geométrico e mostrar ambos os conjuntos de eixos. Solução. Pelo Teorema 1 as equações de transformação são x = x + 1 e y = y + Se substituirmos estes valores de x e y na equação (46) obteremos
43 43 Y Y (x + 1) 3 3(x + 1) (y + ) + 3(x + 1) + 4(y + ) 5 = 0. O X Desenvolvendo e simplificando esta última equação obtemos a equação transformada procurada O 1 X x 3 y = 0. (47) O lugar geométrico, uma parábola semi-cúbica, está representado na Fig. 3. Figura 3 No exemplo 1 a nova origem foi especificada. Usualmente, entretanto, as coordenadas da nova origem não são dadas, mas devem ser determinadas. O processo em tal caso é ilustrado no exemplo seguinte.. Por uma translação dos eixos coordenados transformar a equação x 4y + 6x + 8y + 1 = 0 em outra equação desprovida de termos do primeiro grau. Desenhar o lugar geométrico e mostrar ambos os conjuntos de eixos. Solução. Neste caso particular podemos usar dois métodos diferentes, o primeiro sendo o mais geral. Primeiro método. Se substituirmos na equação acima os valores de x e y dados pelas equações de transformação no Teorema 1, obtemos a equação transformada (x + h) 4(y + k) + 6(x + h) + 8(y + k) + 1 = 0 que, após desenvolvimentos e redução de termos semelhantes assume a forma x 4y + (h + 6)x (8k 8)y + h 4k + 6h + 8k + 1 = 0. (48) Uma vez que a equação transformada deve ser desprovida de termos do primeiro grau, fazemos iguais a zero os coeficientes de x e y na equação (48). Assim temos: Y Y h + 6 = 0 e 8k 8 = 0 donde h = 3 e k = 1. O 3 1 O X X Logo, a nova origem é o ponto ( 3, 1). Se substituirmos estes valores de h e k em (48) obtemos a equação procurada x 4y 4 = 0. (49) Figura 4 O lugar geométrico, uma hipérbole, está representado na Fig. 4.
44 44 Segundo método. No caso de equações do segundo grau desprovidas do termo em xy é possível efetuar a transformação pelo método de completar os quadrados. Assim, os termos da equação x 4y + 6x + 8y + 1 = 0 podem ser reagrupados na forma Então completando os quadrados, obtemos (x + 6x) 4(y y) = 1. donde (x + 6x + 9) 4(y y + 1) = (x + 3) 4(y 1) = 4. (50) Se na equação (50) fazemos as substituições x + 3 = x e y 1 = y (51) obtemos de imediato a equação procurada (49). Obviamente, de (51) temos as equações de transformação x = x 3 e y = y + 1. No exemplo o tipo de simplificação desejada é especificado; em caso contrário, procuramos efetuar o maior número de simplificações possíveis, como ilustrado no exemplo seguinte. 3. Por uma translação dos eixos coordenados, simplificar a equação y 4x 6y + 17 = 0. (5) Solução. Como no primeiro método do exemplo substituímos na equação (5) os valores de x e y dados pelas equaçòes de transformação no Teorema 1. Temos então que pode ser escrita na forma (y + k) 4(x + h) 6(y + k) + 17 = 0 y 4x + (k 6)y + k 4h 6k + 17 = 0. (53) Nossa próxima etapa é determinar os valores de h e k que simplificarão a equação (53). Podemos eliminar o termo em y, mas não podemos eliminar o termo em x uma vez que seu coeficiente é 4. Neste caso, porém, podemos eliminar o termo constante. Em conseqüência escrevemos donde k 6 = 0 e k 4h 6k + 17 = 0 k = 3 e h =. Para estes valores de h e k a equação (53) se reduz à forma procurada y 4x = 0.
45 Exercícios 1. Em cada um dos exercícios, transformar a equação dada por translação dos eixos coordenados para a nova origem indicada. (a) x + y + x 6y + 6 = 0; ( 1, 3). (b) 3x + y + 1x 4y + 8 = 0; (, 1). (c) 4x y 8x 10y 5 = 0; (1, 5). (d) y 3 x + 3y 4x + 3y 3 = 0; (, 1). (e) xy 3x + 4y 13 = 0; ( 4, 3).. Em cada um dos exercícios, por uma translação dos eixos coordenados, transformar a equação dada em outra desprovida de termos do primeiro grau. Usar o primeiro método de exemplo ilustrativo. (a) x + y + 16x 4y + 3 = 0. (b) 3x + y + 18x 8y + 9 = 0. (c) 3x y 4x 4y = 0. (d) xy x + y 10 = 0. (e) 8x 3 + 4x 4y + 4x 1y 1 = Em cada um dos exercícios, por uma translaçào dos eixos coordenados, transformar a equação dada em outra desprovida de termos do primeiro grau. Usar o segundo método do exemplo ilustrativo. (a) 4x + 4y + 3x 4y + 45 = 0. (b) x + 5y 8x + 0y = 0. (c) x 3y + 6x + 6y + 3 = 0. (d) 1x + 18y 1x + 1y 1 = 0. (e) 1x 18y 1x 1y 5 = Em cada um dos exercícios, simplificar a equação dada por uma translação dos eixos coordenados. (a) x + 8x 3y + 10 = 0. (b) 16x + 16y + 8x 48y + 5 = 0. (c) 7x + 36y 48x + 36y 55 = 0. (d) y 6x 4x y 3 = 0. (e) 30xy + 4x 5y Respostas (1a) x + y = 4. (1b) 3x + y = 6. (1c) 4x y = 4. (1d) y 3 x = 0. (1e) x y = 1. (a) x + y = 4. (b) 3x + y = 6. (c) 3x y = 1. (d) x y = 8. (e) x 3 y = 0. (3a) x + y = 5. (3b) x + 5y = 10. (3c) x 3y = 3. (3d) x + 3y = 1. (3e) x 3y = 1 (4a) x 3y = 0. (4b) x + y =. (4c) x + y =. (4d) y 6x = 9. (4e) x y =.
46 46 3. Rotação dos eixos coordenados. A fim de simplificar equações por rotação dos eixos coordenados necessitaremos do seguinte teorema. Teorema. Se os eixos coordenados são girados de um ângulo θ em torno de sua origem O como ponto fixo e se as coordenadas de qualquer ponto P são (x, y) e (x, y ) antes e depois da rotação, respectivamente, então as equações de transformação das antigas para as novas coordenadas são dadas por { x = x cos θ y sen θ y = x sen θ + y cos θ. Demonstração. Na Fig. 5 estão representados os antigos eixos X e Y e os novos eixos X e Y oriundos da rotação. Desde o ponto P tracemos a ordenada AP sobre o eixo X, a ordenada A P sobre o eixo X e o segmento retilíneo OP. Seja ângulo P OA = φ e OP = r. Então, das definições das funções trigonométricas, temos: Y Y P r X A φ θ O A X De (54), temos: x = OA = r cos(θ + φ) (54) y = AP = r sen (θ + φ) (55) x = OA = r cos φ y = A P = r sen φ. x = r cos(θ + φ) = r cos θ cos φ r sen θ sen φ. (56) Figura 5 Se nesta última equação substituirmos os valores dados por (56) obtemos a primeira equação de transformação Semelhantemente de (55) x = x cos θ y sen θ. y = r sen (θ + φ) = r sen θ cos φ + r cos θ sen φ donde, de (56), temos a segunda equação de transformação y = x sen θ + y cos θ. Nota. Para nossas finalidades será necessário girar os eixos coordenados apenas de um ângulo com valor suficiente para colocar um ou outro dos eixos coincidente com, ou paralelo a, qualquer reta fixa dada no plano coordenado. Em conseqüência restringiremos, geralmente, os valores de ângulo de rotação θ ao intervalo dado por 0 θ < 90.
47 Exemplos 1. Transformar a equação x + 3xy + y = 4 (57) por rotação dos eixos coordenados de um ângulo de 30. Desenhar o lugar geométrico e mostrar ambos os conjuntos de eixos. Solução. Pelo teorema as equações de transformação são Y Y X 30 O X 3 x 1 y 3 y. x = x cos 30 y sen 30 = y = x sen 30 + y cos 30 = 1 x + Se estes valores de x e y são substituídos na equação (57) obtemos ( 3 x 1 y ) ( ( x 1 y ) 1 ( + 1 x + 3 y ) = 4. x + 3 y ) Desenvolvendo e simplificando esta última equação obtemos a equação transformada pedida 5x + y = 8. (58) Figura 6 O lugar geométrico, uma elipse, está representado na Fig. 6. No exemplo 1 o ângulo de rotação θ é dado. Geralmente, entretanto, o ângulo de rotação deve ser determinado a fim de alcançar alguma condição estabelecida. O principal emprego para a rotação de eixos é a remoção do termo em xy das equações de segundo grau.. Por uma rotação dos eixos coordenados transformar a equação 9x 4xy + 16y 40x 30y = 0 (59) em outra equação desprovida do termo x y. Desenhar o lugar geométrico e mostrar ambos os conjuntos de eixos. Solução. Se substituirmos na equação (59) os valores de x e y dados pelas equações de transformação no teorema, obtemos 9(x cos θ y sen θ) 4(x cos θ y sen θ)(x sen θ + y cos θ) + 16(x sen θ + y cos θ) 40(x cos θ y sen θ) 30(x sen θ + y cos θ) = 0 que, após desenvolvimento e redução de termos semelhantes, assume a forma (9 cos θ 4 cos θ sen θ + 16 sen θ)x + (14 sen θ cos θ + 4 sen θ 4 cos θ)x y +(9 sen θ + 4 sen θ cos θ + 16 cos θ)y (40 cos θ + 30 sen θ)x + (40 sen θ 30 cos θ)y = 0. (60)
48 48 Visto que a equação transformada deve ser desprovida de termos em x y, igualamos a zero o coeficiente de x y em (60) e obtemos 14 sen θ cos θ + 4 sen θ 4 cos θ = 0. Ora, sen θ = sen θ cos θ e cos θ = cos θ sen θ. Logo a última relação pode ser escrita donde 7 sen θ 4 cos θ = 0 tan θ = 4 7. De acordo com a nota ao teorema, o ângulo θ estará restrito ao primeiro quadrante, de maneira que θ se situará no primeiro ou no segundo quadrantes onde o cosseno e a tangente de um ângulo concordam em sinal. Da mesma forma, sen θ e cos θ serão negativos. Logo, a partir do valor de tan θ dado acima, temos: cos θ = 7 5. A fim de efetuar a simplificação da equação (60) necessitamos os valores de sen θ e cos θ, que podem ser obtidos pelas fórmulas do ângulo metade da Trigonometria. Assim, e Y Y O X θ X sen θ = 1 cos θ = cos θ = 1+cos θ = = = 4 5. Se estes valores de sen θ e cos θ são substituídos na equação (60), temos: ( ) ( ) x x y ( ) y (3 + 18)x + (4 4)y = 0 que se reduz à equação transformada procurada y x = 0. (61) O lugar geométrico, uma parábola, está mostrado na Figura 7 Fig. 7. Nota. Evidentemente é muito mais fácil desenhar o lugar geométrico da equação (61) relativa aos eixos X e Y do que desenhar o lugar geométrico da equação (59) relativa aos eixos X e Y. Mais ainda, as propriedades da parábola podem ser obtidas muito mais facilmente da equação (61) mais simples. 3. Por transformação de coordenadas simplificar a equação 3x xy + 3y x 10y + 9 = 0. (6) Desenhar o lugar geométrico e todos os conjuntos de eixos coordenados. Solução. Uma vez que em (6) os termos de segundo grau não formam um quadrado perfeito, podemos primeiramente transladar os eixos para uma nova origem (h, k). Logo, usando as equações de transformação do Teorema 1, obtemos da equação (6)
49 49 3(x + h) (x + h)(y + k) + 3(y + k) (x + h) 10(y + k) + 9 = 0 que, depois de desenvolvimento, simplificação e redução de termos semelhantes, assume a forma 3x xy + 3y + (6h k )x + ( h + 6k 10)y + (3h hk + 3k h 10k + 9) = 0. (63) A fim de eliminar os termos de primeiro grau em (63) fazemos seus coeficientes iguais a zero. Isto nos dá o sistema 6h k = 0 h + 6k 10 = 0 cuja solução é h = 1 e k =. Substituindo estes valores de h e k em (63) obtemos 3x x y + 3y = 0. (64) A seguir, por rotação de eixos, usando as equações do Teorema, obtemos da equação (64) 3(x cos θ y sen θ) (x cos θ y sen θ)(x sen θ + y cos θ) + 3(x sen θ + y cos θ) = 0 que se reduz a Y (3 cos θ sen θ cos θ + 3 sen θ)x + ( sen θ cos θ)x y +(3 sen θ + sen θ cos θ + 3 cos θ)y = 0. Y X Y 45 O X (65) A fim de eliminar o termo x y de (65) fazemos seu coeficiente igual a zero, obtendo assim sen θ cos θ = 0 donde θ = 45 de acordo com a nota do Teorema. Substituindo este valor de θ em (65) e simplificando, obtemos a equação procurada x + y 1 = 0. (66) O 1 Figura 9 X O lugar geométrico da equação (66), uma elipse, e todos os conjuntos de eixos coordenados estão representados na Fig Exercícios 1. Determinar as novas coordenadas do ponto (3, 4) quando os eixos coordenados são girados de um ângulo de 30.. Determinar as novas coordenadas dos pontos (1, 0) e (0, 1) quando os eixos coordenados são girados de um ângulo de 90.
50 50 3. Em cada um dos exercícios seguintes transformar a equação dada por rotação dos eixos coordenados do ângulo indicado. (a) x+5y 3 = 0; arctan.5. (b) x xy + y x = 0; 45. (c) 3y + 3xy 1 = 0; 60. (d) 5x + 3xy + y 4 = 0; arcsen (e) 11x + 4xy + 4y 0 = 0; arctan (f) x 4 + y 4 + 6x y 3 = 0; Por rotação dos eixos coordenados transformar a equação x y = 0 em outra equação desprovida do termo em x. 5. Por rotação dos eixos coordenados transformar a equação x + y = 0 em outra equação desprovida do termo y. 6. Em cada um dos exercícios seguintes, por uma rotação dos eixos coordenados, transformar a equação dada em outra equação desprovida do termo em x y. (a) 4x + 4xy + y + 5x = 1. (b) 9x + 3xy + 9y = 5. (c) 5x + 4xy + y =. (d) x 5xy + y = 0. (e) x xy + y 4 = 0. (f) 16x + 4xy + 9y + 5x = A equação de uma circunferência é x +y = r. Mostrar que a forma desta equação permanece sem modificação quando referida aos eixos coordenados que foram girados de qualquer ângulo θ. Diz-se então que esta equação é invariante quanto à rotação. 8. Em cada um dos exercícios abaixo, simplificar a equação dada por transformação de coordenadas. (a) x 10xy + y 10x + y + 13 = 0. (b) 5x 7xy + 73y 104x + 7y 48. (c) 16x + 4xy + 9y + 60x 80y = 0. (d) 3x + y 5 = 0. (e) x + xy + y x 10y + 11 = Determinar as novas coordenadas do ponto ( 1, 3) quando os eixos coordenados são, primeiramente, transladados à nova origem (4, 5) e, então, girados de um ângulo de Determinar as novas coordenadas do ponto (, ) quando os eixos coordenados são, primeiramente, girados de um ângulo de 45 e, então, transladados à nova origem ( 1, 1). 11. Por translação dos eixos coordenados à nova origem (3, 3), seguida pela rotação dos eixos de um ângulo de 30, as coordenadas de um certo ponto P são transformadas em (7, 6). Determinar as coordenadas de P em relação aos eixos originais. 1. Por translação dos eixos coordenados à nova origem (1, 1), seguida pela rotação dos eixos de um ângulo de 45, a equação de um certo lugar geométrico é transformada em x y =. Determinar a equação do lugar geométrico em relação aos eixos originais.
ÁLGEBRA 1. Departamento de Matemática UDESC - Joinville
 ÁLGEBRA 1 Departamento de Matemática UDESC - Joinville Conteúdo 1 CURVAS 3 1.1 Cilindros projetantes de uma curva............................ 3 1.1.1 Exemplo....................................... 4 1.
ÁLGEBRA 1 Departamento de Matemática UDESC - Joinville Conteúdo 1 CURVAS 3 1.1 Cilindros projetantes de uma curva............................ 3 1.1.1 Exemplo....................................... 4 1.
SISTEMAS DE COORDENADAS
 1 SISTEMAS DE COORDENADAS 2.1 Coordenadas polares no R² Fonte: Cálculo A. Funções. Limite. Derivação. Integração. Diva Marília Flemming. Mírian Buss Gonçalves. Até o presente momento, localizamos um ponto
1 SISTEMAS DE COORDENADAS 2.1 Coordenadas polares no R² Fonte: Cálculo A. Funções. Limite. Derivação. Integração. Diva Marília Flemming. Mírian Buss Gonçalves. Até o presente momento, localizamos um ponto
Cilindros projetantes de uma curva
 Cilindros projetantes de uma curva Dada uma curva C no espaço é possível obter tres cilindros retos cujas interseções fornecem a curva C. Estes cilindros são obtidos projetando-se a curva em cada um dos
Cilindros projetantes de uma curva Dada uma curva C no espaço é possível obter tres cilindros retos cujas interseções fornecem a curva C. Estes cilindros são obtidos projetando-se a curva em cada um dos
Coordenadas Polares. Exemplos: Representar em um sistema de coordenadas polares, os seguintes pontos: d) P 4,
 P 4,") Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano, as coordenadas são números
Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano, as coordenadas são números
Coordenadas Polares. Exemplos: Representar em um sistema de coordenadas polares, os seguintes pontos: d) P 4,
 P 4,") Cálculo II Profa. Adriana Cherri 1 Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano,
Cálculo II Profa. Adriana Cherri 1 Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano,
Aula 4. Coordenadas polares. Definição 1. Observação 1
 Aula Coordenadas polares Nesta aula veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana Embora os sistemas cartesianos sejam muito utilizados, há curvas
Aula Coordenadas polares Nesta aula veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana Embora os sistemas cartesianos sejam muito utilizados, há curvas
APOSTILA DE GEOMETRIA ANALÍTICA
 APOSTILA DE GEOMETRIA ANALÍTICA Prof. Dr Rogério de Aguiar Chefe do Departamento de Matemática CCT - UDESC - JOINVILLE Email: dma2ra@joinville.udesc.br Home Page: www.joinville.udesc.br/dmat/rogerio Professores
APOSTILA DE GEOMETRIA ANALÍTICA Prof. Dr Rogério de Aguiar Chefe do Departamento de Matemática CCT - UDESC - JOINVILLE Email: dma2ra@joinville.udesc.br Home Page: www.joinville.udesc.br/dmat/rogerio Professores
Cálculo II - Superfícies no Espaço
 UFJF - DEPARTAMENTO DE MATEMÁTICA Cálculo II - Superfícies no Espaço Prof. Wilhelm Passarella Freire Prof. Grigori Chapiro 1 Conteúdo 1 Introdução 4 2 Plano 6 2.1 Parametrização do plano...................................
UFJF - DEPARTAMENTO DE MATEMÁTICA Cálculo II - Superfícies no Espaço Prof. Wilhelm Passarella Freire Prof. Grigori Chapiro 1 Conteúdo 1 Introdução 4 2 Plano 6 2.1 Parametrização do plano...................................
Geometria Analítica II - Aula 5 108
 Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
Geometria Analítica II - Aula 5 108 IM-UFF Aula 6 Superfícies Cilíndricas Sejam γ uma curva contida num plano π do espaço e v 0 um vetor não-paralelo ao plano π. A superfície cilíndrica S de diretriz γ
6.1 equações canônicas de círculos e esferas
 6 C Í R C U LO S E E S F E R A S 6.1 equações canônicas de círculos e esferas Um círculo é o conjunto de pontos no plano que estão a uma certa distância r de um ponto dado (a, b). Desta forma temos que
6 C Í R C U LO S E E S F E R A S 6.1 equações canônicas de círculos e esferas Um círculo é o conjunto de pontos no plano que estão a uma certa distância r de um ponto dado (a, b). Desta forma temos que
Equações paramétricas das cônicas
 Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Superfícies e Curvas no Espaço
 Superfícies e Curvas no Espaço Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de deembro de 2001 1 Quádricas Nesta
Superfícies e Curvas no Espaço Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de deembro de 2001 1 Quádricas Nesta
1 Cônicas Não Degeneradas
 Seções Cônicas Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de dezembro de 2001 Estudaremos as (seções) cônicas,
Seções Cônicas Reginaldo J. Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://www.mat.ufmg.br/~regi regi@mat.ufmg.br 11 de dezembro de 2001 Estudaremos as (seções) cônicas,
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
UNIVERSIDADE FEDERAL DE ALAGOAS INSTITUTO DE MATEMÁTICA Aluno(a): Professor(a): Curso:
: Professor(a): Curso:") 5 Geometria Analítica - a Avaliação - 6 de setembro de 0 Justique todas as suas respostas.. Dados os vetores u = (, ) e v = (, ), determine os vetores m e n tais que: { m n = u, v u + v m + n = P roj u
5 Geometria Analítica - a Avaliação - 6 de setembro de 0 Justique todas as suas respostas.. Dados os vetores u = (, ) e v = (, ), determine os vetores m e n tais que: { m n = u, v u + v m + n = P roj u
Capítulo 12. Ângulo entre duas retas no espaço. Definição 1. O ângulo (r1, r2 ) entre duas retas r1 e r2 é assim definido:
 entre duas retas r1 e r2 é assim definido:") Capítulo 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r é assim definido: (r1, r ) 0o se r1 e r são coincidentes, se as retas são concorrentes, isto é, r1
Capítulo 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r é assim definido: (r1, r ) 0o se r1 e r são coincidentes, se as retas são concorrentes, isto é, r1
Geometria Analítica II - Aula
 Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
Geometria Analítica II - Aula 0 94 Aula Coordenadas Cilíndricas e Esféricas Para descrever de modo mais simples algumas curvas e regiões no plano introduzimos anteriormente as coordenadas polares. No espaço
Equações Paramétricas e Coordenadas Polares. Copyright Cengage Learning. Todos os direitos reservados.
 10 Equações Paramétricas e Coordenadas Polares Copyright Cengage Learning. Todos os direitos reservados. 10.3 Coordenadas Polares Copyright Cengage Learning. Todos os direitos reservados. Coordenadas Polares
10 Equações Paramétricas e Coordenadas Polares Copyright Cengage Learning. Todos os direitos reservados. 10.3 Coordenadas Polares Copyright Cengage Learning. Todos os direitos reservados. Coordenadas Polares
8.1 Áreas Planas. 8.2 Comprimento de Curvas
 8.1 Áreas Planas Suponha que uma certa região D do plano xy seja delimitada pelo eixo x, pelas retas x = a e x = b e pelo grá co de uma função contínua e não negativa y = f (x) ; a x b, como mostra a gura
8.1 Áreas Planas Suponha que uma certa região D do plano xy seja delimitada pelo eixo x, pelas retas x = a e x = b e pelo grá co de uma função contínua e não negativa y = f (x) ; a x b, como mostra a gura
Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA
 Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA 1. Funções Vetoriais Até agora nos cursos de Cálculo só tratamos de funções cujas imagens estavam em R. Essas funções são chamadas de funções com valores
Cálculo Vetorial / Ilka Rebouças Freire / DMAT UFBA 1. Funções Vetoriais Até agora nos cursos de Cálculo só tratamos de funções cujas imagens estavam em R. Essas funções são chamadas de funções com valores
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 76 Capítulo 4 Distâncias no plano e regiões no plano 1. Distância de um ponto a uma reta Dados um ponto P e uma reta r no plano, já sabemos calcular a distância de P a cada ponto P r. Definição 1 Definimos
76 Capítulo 4 Distâncias no plano e regiões no plano 1. Distância de um ponto a uma reta Dados um ponto P e uma reta r no plano, já sabemos calcular a distância de P a cada ponto P r. Definição 1 Definimos
Geometria Analítica II - Aula 7 178
 Geometria Analítica II - Aula 7 178 Aula 8 Superfícies Regradas Dizemos que uma superfície S é regrada quando por todo ponto P pertencente a S passa pelo menos uma reta r P inteiramente contida em S. Fig.
Geometria Analítica II - Aula 7 178 Aula 8 Superfícies Regradas Dizemos que uma superfície S é regrada quando por todo ponto P pertencente a S passa pelo menos uma reta r P inteiramente contida em S. Fig.
Aula 12. Ângulo entre duas retas no espaço. Definição 1. O ângulo (r1, r2 ) entre duas retas r1 e r2 se define da seguinte maneira:
 entre duas retas r1 e r2 se define da seguinte maneira:") Aula 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r se define da seguinte maneira: (r1, r ) 0o se r1 e r são coincidentes, Se as retas são concorrentes, isto
Aula 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r se define da seguinte maneira: (r1, r ) 0o se r1 e r são coincidentes, Se as retas são concorrentes, isto
4.1 Superfície Cilíndrica
 4. SUPERFÍCIES QUÁDRICAS CÁLCULO VETORIAL - 2017.2 4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana,
4. SUPERFÍCIES QUÁDRICAS CÁLCULO VETORIAL - 2017.2 4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana,
Figura 9.1: Corpo que pode ser simplificado pelo estado plano de tensões (a), estado de tensões no interior do corpo (b).
, estado de tensões no interior do corpo (b).") 9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
Capítulo 19. Coordenadas polares
 Capítulo 19 Coordenadas polares Neste capítulo, veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana. Embora os sistemas cartesianos sejam muito utilizados,
Capítulo 19 Coordenadas polares Neste capítulo, veremos que há outra maneira de expressar a posição de um ponto no plano, distinta da forma cartesiana. Embora os sistemas cartesianos sejam muito utilizados,
Aula 32 Curvas em coordenadas polares
 MÓDULO 3 - AULA 32 Aula 32 Curvas em coordenadas polares Objetivo Aprender a usar as coordenadas polares para representar curvas planas. As coordenadas polares nos dão uma maneira alternativa de localizar
MÓDULO 3 - AULA 32 Aula 32 Curvas em coordenadas polares Objetivo Aprender a usar as coordenadas polares para representar curvas planas. As coordenadas polares nos dão uma maneira alternativa de localizar
Dizemos que uma superfície é um cilindro se na equação cartesiana da superfície há uma variável que não aparece.
 Aula 9 Cilindros e Quádricas Cilindros Dizemos que uma superfície é um cilindro se na equação cartesiana da superfície há uma variável que não aparece. Exemplo 1. x 2 + y 2 = 1 No espaço, o conjunto de
Aula 9 Cilindros e Quádricas Cilindros Dizemos que uma superfície é um cilindro se na equação cartesiana da superfície há uma variável que não aparece. Exemplo 1. x 2 + y 2 = 1 No espaço, o conjunto de
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
 04 CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA CAPÍTULO 0 TRANSLAÇÃO E ROTAÇÃO DE EIXOS TRANSLAÇÃO DE EIXOS NO R Sejam e O os eixos primitivos, do Sistema Cartesiano de Eixos Coordenados com origem O(0,0).
04 CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA CAPÍTULO 0 TRANSLAÇÃO E ROTAÇÃO DE EIXOS TRANSLAÇÃO DE EIXOS NO R Sejam e O os eixos primitivos, do Sistema Cartesiano de Eixos Coordenados com origem O(0,0).
Ricardo Bianconi. Fevereiro de 2015
 Seções Cônicas Ricardo Bianconi Fevereiro de 2015 Uma parte importante da Geometria Analítica é o estudo das curvas planas e, em particular, das cônicas. Neste texto estudamos algumas propriedades das
Seções Cônicas Ricardo Bianconi Fevereiro de 2015 Uma parte importante da Geometria Analítica é o estudo das curvas planas e, em particular, das cônicas. Neste texto estudamos algumas propriedades das
Preliminares de Cálculo
 Preliminares de Cálculo Profs. Ulysses Sodré e Olivio Augusto Weber Londrina, 21 de Fevereiro de 2008, arquivo: precalc.tex... Conteúdo 1 Números reais 2 1.1 Algumas propriedades do corpo R dos números
Preliminares de Cálculo Profs. Ulysses Sodré e Olivio Augusto Weber Londrina, 21 de Fevereiro de 2008, arquivo: precalc.tex... Conteúdo 1 Números reais 2 1.1 Algumas propriedades do corpo R dos números
Curvas Planas em Coordenadas Polares
 Curvas Planas em Coordenadas Polares Sumário. Coordenadas Polares.................... Relações entre coordenadas polares e coordenadas cartesianas...................... 6. Exercícios........................
Curvas Planas em Coordenadas Polares Sumário. Coordenadas Polares.................... Relações entre coordenadas polares e coordenadas cartesianas...................... 6. Exercícios........................
Parametrização de algumas curvas planas
 Aula 3 Parametrização de algumas curvas planas Nesta aula veremos como obter equações paramétricas de algumas curvas planas, usando relações trigonométricas básicas e observando as condições que um ponto
Aula 3 Parametrização de algumas curvas planas Nesta aula veremos como obter equações paramétricas de algumas curvas planas, usando relações trigonométricas básicas e observando as condições que um ponto
54 CAPÍTULO 2. GEOMETRIA ANALÍTICA ( ) =
 =") 54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
Universidade Federal da Bahia
 Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA3 - CÁLCULO B UNIDADE II - LISTA DE EXERCÍCIOS Atualiada 13.1 Coordenadas Polares [1] Dados os pontos P 1 (3, 5π 3 ), P ( 3, 33 ),
Universidade Federal da Bahia Instituto de Matemática DISCIPLINA: MATA3 - CÁLCULO B UNIDADE II - LISTA DE EXERCÍCIOS Atualiada 13.1 Coordenadas Polares [1] Dados os pontos P 1 (3, 5π 3 ), P ( 3, 33 ),
1 Vetores no Plano e no Espaço
 1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
21 e 22. Superfícies Quádricas. Sumário
 21 e 22 Superfícies uádricas Sumário 21.1 Introdução....................... 2 21.2 Elipsoide........................ 3 21.3 Hiperboloide de uma Folha.............. 4 21.4 Hiperboloide de duas folhas..............
21 e 22 Superfícies uádricas Sumário 21.1 Introdução....................... 2 21.2 Elipsoide........................ 3 21.3 Hiperboloide de uma Folha.............. 4 21.4 Hiperboloide de duas folhas..............
0 < c < a ; d(f 1, F 2 ) = 2c
 = 2c") Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
54 CAPÍTULO 2. GEOMETRIA ANALÍTICA ( ) =
 =") 54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
54 CAPÍTULO. GEOMETRIA ANALÍTICA.5 Cônicas O grá co da equação + + + + + = 0 (.4) onde,,,, e são constantes com, e, não todos nulos, é uma cônica. A equação (.4) é chamada de equação geral do grau em e
A primeira coisa a fazer é saber quais são as equações das curvas quando elas já se encontram na melhor
 Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Lista 5: Superfícies. (e) x = 4 tan(t) (f) x = (g) x = 1 4 csc(t) y = cosh(2t)
 x = 4 tan(t) (f) x = (g) x = 1 4 csc(t) y = cosh(2t)") 1. Parametrize as seguintes curvas. + = 16 + 5 = 15 = 4 = 16 + 5 + 8 7 = 0 (f) + 4 + 1 + 6 = 0. Lista 5: Superfícies (g) = + (h) + = (i) + = 4 (j) + = 1 (k) 6 + 18 = 0 (l) r = sin(θ). Determine a equação
1. Parametrize as seguintes curvas. + = 16 + 5 = 15 = 4 = 16 + 5 + 8 7 = 0 (f) + 4 + 1 + 6 = 0. Lista 5: Superfícies (g) = + (h) + = (i) + = 4 (j) + = 1 (k) 6 + 18 = 0 (l) r = sin(θ). Determine a equação
4.1 Superfície Cilíndrica
 4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana, denominada diretriz, paralelamente a uma reta
4.1 Superfície Cilíndrica Uma superfície cilíndrica (ou simplesmente cilindro) é a superfície gerada por uma reta que se move ao longo de uma curva plana, denominada diretriz, paralelamente a uma reta
3. Achar a equação da esfera definida pelas seguintes condições: centro C( 4, 2, 3) e tangente ao plano π : x y 2z + 7 = 0.
 e tangente ao plano π : x y 2z + 7 = 0.") Universidade Federal de Uerlândia Faculdade de Matemática Disciplina : Geometria Analítica (GMA00) Assunto: Superfícies, Quádricas, Curvas e Coordenadas Professor Sato 4 a Lista de exercícios. Determinar
Universidade Federal de Uerlândia Faculdade de Matemática Disciplina : Geometria Analítica (GMA00) Assunto: Superfícies, Quádricas, Curvas e Coordenadas Professor Sato 4 a Lista de exercícios. Determinar
Geometria Analítica II - Aula 4 82
 Geometria Analítica II - Aula 4 8 IM-UFF K. Frensel - J. Delgado Aula 5 Esferas Iniciaremos o nosso estudo sobre superfícies com a esfera, que já nos é familiar. A esfera S de centro no ponto A e raio
Geometria Analítica II - Aula 4 8 IM-UFF K. Frensel - J. Delgado Aula 5 Esferas Iniciaremos o nosso estudo sobre superfícies com a esfera, que já nos é familiar. A esfera S de centro no ponto A e raio
PARTE 4. ESFERAS E SUPERFÍCIES QUÁDRICAS EM GERAL (Leitura para Casa)
") PARTE 4 REVISÃO DE PLANOS, CILINDROS, SUPERFÍCIES DE REVOLUÇÃO, ESFERAS E SUPERFÍCIES QUÁDRICAS EM GERAL (Leitura para Casa) Vamos agora faer uma revisão de planos, cilindros, superfícies de revolução,
PARTE 4 REVISÃO DE PLANOS, CILINDROS, SUPERFÍCIES DE REVOLUÇÃO, ESFERAS E SUPERFÍCIES QUÁDRICAS EM GERAL (Leitura para Casa) Vamos agora faer uma revisão de planos, cilindros, superfícies de revolução,
Funções Vetoriais. Copyright Cengage Learning. Todos os direitos reservados.
 13 Funções Vetoriais Copyright Cengage Learning. Todos os direitos reservados. 13.1 Funções Vetoriais e Curvas Espaciais Copyright Cengage Learning. Todos os direitos reservados. Funções Vetoriais e Curvas
13 Funções Vetoriais Copyright Cengage Learning. Todos os direitos reservados. 13.1 Funções Vetoriais e Curvas Espaciais Copyright Cengage Learning. Todos os direitos reservados. Funções Vetoriais e Curvas
d{p, s) = R. Mas, d(p, s) = d(p, Q), onde Q(0, 0, z). Logo, P{x, y, z) pertence ao cilindro se, e somente se,
 = R. Mas, d(p, s) = d(p, Q), onde Q(0, 0, z). Logo, P{x, y, z) pertence ao cilindro se, e somente se,") 134 Geometria Analítica \ Vamos deduzir uma equação do cilindro, em relação a um sistema de coordenadas que contém s como eixo z. Seja R a distância entre r es. Então, um ponto P(x, y, z) pertence ao cilindro
134 Geometria Analítica \ Vamos deduzir uma equação do cilindro, em relação a um sistema de coordenadas que contém s como eixo z. Seja R a distância entre r es. Então, um ponto P(x, y, z) pertence ao cilindro
Adriano Pedreira Cattai
 Adriano Pedreira Cattai apcattai@ahoo.com.br Universidade Federal da Bahia UFBA, MAT A01, 006. 1. Discussão da equação de uma superfície. Construção de uma superfície 1.1 Introdução Definição de Superfície
Adriano Pedreira Cattai apcattai@ahoo.com.br Universidade Federal da Bahia UFBA, MAT A01, 006. 1. Discussão da equação de uma superfície. Construção de uma superfície 1.1 Introdução Definição de Superfície
Aula 17 Superfícies quádricas - parabolóides
 Objetivos Aula 17 Superfícies quádricas - parabolóides Apresentar os parabolóides elípticos e hiperbólicos identificando suas seções planas. Estudar os parabolóides regrados e de revolução. Nas superfícies
Objetivos Aula 17 Superfícies quádricas - parabolóides Apresentar os parabolóides elípticos e hiperbólicos identificando suas seções planas. Estudar os parabolóides regrados e de revolução. Nas superfícies
Aula Exemplos diversos. Exemplo 1
 Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
SECÇÕES CÔNICAS E SUPERFÍCIES QUÁDRICAS Prof. Vasco Ricardo Aquino da Silva
 SECÇÕES CÔNICAS E SUPERFÍCIES QUÁDRICAS Prof. Vasco Ricardo Aquino da Silva SECÇÕES CÔNICAS Usando o programa winplot visualize as cônicas disponíveis em nosso AVA Moodle. 1. Elementos da Elipse: F1, F2:
SECÇÕES CÔNICAS E SUPERFÍCIES QUÁDRICAS Prof. Vasco Ricardo Aquino da Silva SECÇÕES CÔNICAS Usando o programa winplot visualize as cônicas disponíveis em nosso AVA Moodle. 1. Elementos da Elipse: F1, F2:
Aula 19 Elipse - continuação
 MÓDULO 1 - AULA 19 Aula 19 Elipse - continuação Objetivos Desenhar a elipse com compasso e régua com escala. Determinar a equação reduzida da elipse no sistema de coordenadas com origem no ponto médio
MÓDULO 1 - AULA 19 Aula 19 Elipse - continuação Objetivos Desenhar a elipse com compasso e régua com escala. Determinar a equação reduzida da elipse no sistema de coordenadas com origem no ponto médio
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
ELIPSE. Figura 1: Desenho de uma elipse no plano euclidiano (à esquerda). Desenho de uma elipse no plano cartesiano (à direita).
. Desenho de uma elipse no plano cartesiano (à direita).") QUÁDRICAS/CÔNICAS - Cálculo II MAT 147 FEAUSP Segundo semestre de 2018 Professor Oswaldo Rio Branco de Oliveira [ Veja também http://www.ime.usp.br/~oliveira/ele-conicas.pdf] No plano euclidiano consideremos
QUÁDRICAS/CÔNICAS - Cálculo II MAT 147 FEAUSP Segundo semestre de 2018 Professor Oswaldo Rio Branco de Oliveira [ Veja também http://www.ime.usp.br/~oliveira/ele-conicas.pdf] No plano euclidiano consideremos
Aula 9 Cônicas - Rotação de sistemas de coordenadas
 MÓDULO 1 - AULA 9 Aula 9 Cônicas - Rotação de sistemas de coordenadas Objetivos Entender mudanças de coordenadas por rotações. Identificar uma cônica rotacionada a partir da sua equação geral. Identificar
MÓDULO 1 - AULA 9 Aula 9 Cônicas - Rotação de sistemas de coordenadas Objetivos Entender mudanças de coordenadas por rotações. Identificar uma cônica rotacionada a partir da sua equação geral. Identificar
Geometria Analítica. Cônicas. Prof Marcelo Maraschin de Souza
 Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
MAT Poli Cônicas - Parte I
 MAT2454 - Poli - 2011 Cônicas - Parte I Uma equação quadrática em duas variáveis, x e y, é uma equação da forma ax 2 +by 2 +cxy +dx+ey +f = 0, em que pelo menos um doscoeficientes a, b oucénão nulo 1.
MAT2454 - Poli - 2011 Cônicas - Parte I Uma equação quadrática em duas variáveis, x e y, é uma equação da forma ax 2 +by 2 +cxy +dx+ey +f = 0, em que pelo menos um doscoeficientes a, b oucénão nulo 1.
Capítulo 3 - Geometria Analítica
 1. Gráficos de Equações Capítulo 3 - Geometria Analítica Conceito:O gráfico de uma equação é o conjunto de todos os pontos e somente estes pontos, cujas coordenadas satisfazem a equação. Assim, o gráfico
1. Gráficos de Equações Capítulo 3 - Geometria Analítica Conceito:O gráfico de uma equação é o conjunto de todos os pontos e somente estes pontos, cujas coordenadas satisfazem a equação. Assim, o gráfico
Exercícios sobre Trigonometria
 Universidade Federal Fluminense Campus do Valonguinho Instituto de Matemática e Estatística Departamento de Matemática Aplicada - GMA Prof Saponga uff Rua Mário Santos Braga s/n 400-40 Niterói, RJ Tels:
Universidade Federal Fluminense Campus do Valonguinho Instituto de Matemática e Estatística Departamento de Matemática Aplicada - GMA Prof Saponga uff Rua Mário Santos Braga s/n 400-40 Niterói, RJ Tels:
SEÇÕES CÔNICAS. Figura 1
 INSTITUTO DE MATEMÁTICA UFBA DISCIPLINA: MATEMÁTICA BÁSICA II - SEM. 004.1 PROF. GRAÇA LUZIA DOMINGUEZ SANTOS SEÇÕES CÔNICAS Sejam duas retas e e r concorrentes em O, tal que o ângulo α entre e e r é diferente
INSTITUTO DE MATEMÁTICA UFBA DISCIPLINA: MATEMÁTICA BÁSICA II - SEM. 004.1 PROF. GRAÇA LUZIA DOMINGUEZ SANTOS SEÇÕES CÔNICAS Sejam duas retas e e r concorrentes em O, tal que o ângulo α entre e e r é diferente
10. Determine as equações cartesianas das famílias de retas que fazem um ângulo de π/4 radianos com a reta y = 2x + 1.
 Geometria Analítica. 1. Determine as posições relativas e as interseções entre os conjuntos em R abaixo. Em cada item também faça um esboço dos dois conjuntos dados no mesmo sistema de eixos. (a) C : (x
Geometria Analítica. 1. Determine as posições relativas e as interseções entre os conjuntos em R abaixo. Em cada item também faça um esboço dos dois conjuntos dados no mesmo sistema de eixos. (a) C : (x
Aula 15. Derivadas Direcionais e Vetor Gradiente. Quando u = (1, 0) ou u = (0, 1), obtemos as derivadas parciais em relação a x ou y, respectivamente.
 ou u = (0, 1), obtemos as derivadas parciais em relação a x ou y, respectivamente.") Aula 15 Derivadas Direcionais e Vetor Gradiente Seja f(x, y) uma função de variáveis. Iremos usar a notação D u f(x 0, y 0 ) para: Derivada direcional de f no ponto (x 0, y 0 ), na direção do vetor unitário
Aula 15 Derivadas Direcionais e Vetor Gradiente Seja f(x, y) uma função de variáveis. Iremos usar a notação D u f(x 0, y 0 ) para: Derivada direcional de f no ponto (x 0, y 0 ), na direção do vetor unitário
Aula 10 Regiões e inequações no plano
 MÓDULO 1 - AULA 10 Aula 10 Regiões e inequações no plano Objetivos Resolver inequações do segundo grau. Analisar sistemas envolvendo inequações do primeiro e segundo graus. Resolver inequações modulares
MÓDULO 1 - AULA 10 Aula 10 Regiões e inequações no plano Objetivos Resolver inequações do segundo grau. Analisar sistemas envolvendo inequações do primeiro e segundo graus. Resolver inequações modulares
3.2 Determine a equação da circunferência de raio 5, tangente à reta 3x +4y =16no ponto A (4, 1).
.") 3.1 Obtenha a equação e esboce o gráfico da circunferência caracterizada por: (a) Centro C (, 1) eraior =5; (b) Passa pelos pontos A (1, ),B(1, 1) e C (, 3) ; (c) Inscrita no triângulo determinado pelas
3.1 Obtenha a equação e esboce o gráfico da circunferência caracterizada por: (a) Centro C (, 1) eraior =5; (b) Passa pelos pontos A (1, ),B(1, 1) e C (, 3) ; (c) Inscrita no triângulo determinado pelas
PARTE III CÔNICAS CONTEÚDOS. Transformações de coordenadas. Translação dos eixos coordenados Rotação dos eixos coordenados. Lugares geométricos
 PARTE III CÔNICAS CONTEÚDOS Transformações de coordenadas Translação dos eios coordenados Rotação dos eios coordenados Lugares geométricos Cônicas Parábola Elipse Hipérbole Equação geral Equações paramétricas
PARTE III CÔNICAS CONTEÚDOS Transformações de coordenadas Translação dos eios coordenados Rotação dos eios coordenados Lugares geométricos Cônicas Parábola Elipse Hipérbole Equação geral Equações paramétricas
Aula 31 Funções vetoriais de uma variável real
 MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1. CAPÍTULO 2 Sistemas de Coordenadas Retangulares 9. CAPÍTULO 3 Retas 18
 Sumário CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1 Sistema de Coordenadas Lineares 1 Intervalos Finitos 3 Intervalos Infinitos 3 Desigualdades 3 CAPÍTULO 2 Sistemas de
Sumário CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1 Sistema de Coordenadas Lineares 1 Intervalos Finitos 3 Intervalos Infinitos 3 Desigualdades 3 CAPÍTULO 2 Sistemas de
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III
 UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
,,,,,,,, e são constantes com,,,, e, não todas nulas. Uma equação desse tipo é a equação de uma quádrica. Observe que a equação
 Capítulo 5 As Superfícies O estudo das superfícies do espaço, iniciado com os planos no capítulo anterior, tem como sequência natural a classi cação das superfícies que podem ser expressas por equações
Capítulo 5 As Superfícies O estudo das superfícies do espaço, iniciado com os planos no capítulo anterior, tem como sequência natural a classi cação das superfícies que podem ser expressas por equações
1. A partir da definição, determinar a equação da parábola P, cujo foco é F = (3, 4) e cuja diretriz é L : x + y 2 = 0. (x 3) 2 + (y + 4) 2 =
 e cuja diretriz é L : x + y 2 = 0. (x 3) 2 + (y + 4) 2 =") QUESTÕES-AULA 18 1. A partir da definição, determinar a equação da parábola P, cujo foco é F = (3, 4) e cuja diretriz é L : x + y = 0. Solução Seja P = (x, y) R. Temos que P P d(p, F ) = d(p, L) (x 3)
QUESTÕES-AULA 18 1. A partir da definição, determinar a equação da parábola P, cujo foco é F = (3, 4) e cuja diretriz é L : x + y = 0. Solução Seja P = (x, y) R. Temos que P P d(p, F ) = d(p, L) (x 3)
Geometria Analítica. Cônicas. Prof. Vilma Karsburg
 Geometria Analítica Cônicas Prof. Vilma Karsburg Cônicas Sejam duas retas e e g concorrentes em O e não perpendiculares. Considere e fixa e g girar 360 em torno de e, mantendo constante o ângulo entre
Geometria Analítica Cônicas Prof. Vilma Karsburg Cônicas Sejam duas retas e e g concorrentes em O e não perpendiculares. Considere e fixa e g girar 360 em torno de e, mantendo constante o ângulo entre
Resolvendo inequações: expressões com desigualdades (encontrar os valores que satisfazem a expressão)
") R é ordenado: Se a, b, c R i) a < b se e somente se b a > 0 (a diferença do maior com o menor será positiva) ii) se a > 0 e b > 0 então a + b > 0 (a soma de dois números positivos é positiva) iii) se a
R é ordenado: Se a, b, c R i) a < b se e somente se b a > 0 (a diferença do maior com o menor será positiva) ii) se a > 0 e b > 0 então a + b > 0 (a soma de dois números positivos é positiva) iii) se a
Aula 18 Cilindros quádricos e identificação de quádricas
 MÓDULO 2 - AULA 18 Aula 18 Cilindros quádricos e identificação de quádricas Objetivos Estudar os cilindros quádricos, analisando suas seções planas paralelas aos planos coordenados e estabelecendo suas
MÓDULO 2 - AULA 18 Aula 18 Cilindros quádricos e identificação de quádricas Objetivos Estudar os cilindros quádricos, analisando suas seções planas paralelas aos planos coordenados e estabelecendo suas
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
GGM Geometria Analítica e Cálculo Vetorial Geometria Analítica Básica 20/12/2012- GGM - UFF Dirce Uesu
 GGM0016 Geometria Analítica e Cálculo Vetorial Geometria Analítica Básica 0/1/01- GGM - UFF Dirce Uesu CÔNICAS DEFINIÇÃO GEOMÉTRICA Exercício: Acesse o sitio abaixo e use o programa: http://www.professores.uff.br/hjbortol/disciplinas/005.1/gma04096/applets/conic/co
GGM0016 Geometria Analítica e Cálculo Vetorial Geometria Analítica Básica 0/1/01- GGM - UFF Dirce Uesu CÔNICAS DEFINIÇÃO GEOMÉTRICA Exercício: Acesse o sitio abaixo e use o programa: http://www.professores.uff.br/hjbortol/disciplinas/005.1/gma04096/applets/conic/co
Geometria Analítica e Vetorial - Daniel Miranda, Rafael Grisi, Sinuê Lodovici
 Geometria Analítica e Vetorial - Daniel Miranda, Rafael Grisi, Sinuê Lodovici 5 Â N G U LO S E D I ST Â N C I A 5.1 ângulos No capítulo anterior nos concentramos no estudo da posição relativa entre dois
Geometria Analítica e Vetorial - Daniel Miranda, Rafael Grisi, Sinuê Lodovici 5 Â N G U LO S E D I ST Â N C I A 5.1 ângulos No capítulo anterior nos concentramos no estudo da posição relativa entre dois
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Civil + Física 03 de Julho de Prof o. E.T.
 Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Civil + Física 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Civil + Física 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M
Obter as equações paramétricas das cônicas.
 MÓDULO 1 - AULA 1 Aula 1 Equações paramétricas das cônicas Objetivo Obter as equações paramétricas das cônicas. Estudando as retas no plano, você viu que a reta s, determinada pelos pontos P = (x 1, y
MÓDULO 1 - AULA 1 Aula 1 Equações paramétricas das cônicas Objetivo Obter as equações paramétricas das cônicas. Estudando as retas no plano, você viu que a reta s, determinada pelos pontos P = (x 1, y
LISTA DE EXERCÍCIOS #5 - ANÁLISE VETORIAL EM FÍSICA
 LISTA DE EXERCÍCIOS #5 - ANÁLISE VETORIAL EM FÍSICA PROBLEMAS-EXEMPLO 1. Determinar o comprimento de arco das seguintes curvas, nos intervalos especificados. (a) r(t) = t î + t ĵ, de t = a t =. Resolução
LISTA DE EXERCÍCIOS #5 - ANÁLISE VETORIAL EM FÍSICA PROBLEMAS-EXEMPLO 1. Determinar o comprimento de arco das seguintes curvas, nos intervalos especificados. (a) r(t) = t î + t ĵ, de t = a t =. Resolução
A integral definida Problema:
 A integral definida Seja y = f(x) uma função definida e limitada no intervalo [a, b], e tal que f(x) 0 p/ todo x [a, b]. Problema: Calcular (definir) a área, A,da região do plano limitada pela curva y
A integral definida Seja y = f(x) uma função definida e limitada no intervalo [a, b], e tal que f(x) 0 p/ todo x [a, b]. Problema: Calcular (definir) a área, A,da região do plano limitada pela curva y
MAT Cálculo a Várias Variáveis I Lista de Exercícios sobre Integração Dupla
 MAT116 - Cálculo a Várias Variáveis I Lista de Exercícios sobre Integração Dupla 1 Exercícios Complementares resolvidos Exercício 1 Considere a integral iterada 1 ] exp ( x ) dx dy. x=y 1. Inverta a ordem
MAT116 - Cálculo a Várias Variáveis I Lista de Exercícios sobre Integração Dupla 1 Exercícios Complementares resolvidos Exercício 1 Considere a integral iterada 1 ] exp ( x ) dx dy. x=y 1. Inverta a ordem
Geometria Analítica - Aula
 Geometria Analítica - Aula 19 246 IM-UFF K. Frensel - J. Delgado Aula 20 Vamos analisar a equação Ax 2 + Cy 2 + Dx + Ey + F = 0 nos casos em que exatamente um dos coeficientes A ou C é nulo. 1. Parábola
Geometria Analítica - Aula 19 246 IM-UFF K. Frensel - J. Delgado Aula 20 Vamos analisar a equação Ax 2 + Cy 2 + Dx + Ey + F = 0 nos casos em que exatamente um dos coeficientes A ou C é nulo. 1. Parábola
Derivadas Parciais Capítulo 14
 Derivadas Parciais Capítulo 14 DERIVADAS PARCIAIS No Exemplo 6 da Seção 14.7 maximizamos a função volume V = xyz sujeita à restrição 2xz + 2yz + xy = que expressa a condição de a área da superfície ser
Derivadas Parciais Capítulo 14 DERIVADAS PARCIAIS No Exemplo 6 da Seção 14.7 maximizamos a função volume V = xyz sujeita à restrição 2xz + 2yz + xy = que expressa a condição de a área da superfície ser
6 AULA. Equações Paramétricas LIVRO. META Estudar funções que a cada ponto do domínio associa um par ordenado
 1 LIVRO Equações Paramétricas 6 AULA META Estudar funções que a cada ponto do domínio associa um par ordenado de R 2 OBJETIVOS Estudar movimentos de partículas no plano. PRÉ-REQUISITOS Ter compreendido
1 LIVRO Equações Paramétricas 6 AULA META Estudar funções que a cada ponto do domínio associa um par ordenado de R 2 OBJETIVOS Estudar movimentos de partículas no plano. PRÉ-REQUISITOS Ter compreendido
MÓDULO 1 - AULA 21. Objetivos
 Aula 1 Hipérbole - continuação Objetivos Aprender a desenhar a hipérbole com compasso e régua com escala. Determinar a equação reduzida da hipérbole no sistema de coordenadas com origem no ponto médio
Aula 1 Hipérbole - continuação Objetivos Aprender a desenhar a hipérbole com compasso e régua com escala. Determinar a equação reduzida da hipérbole no sistema de coordenadas com origem no ponto médio
MAT CÁLCULO 2 PARA ECONOMIA. Geometria Analítica
 MT0146 - CÁLCULO PR ECONOMI SEMESTRE DE 016 LIST DE PROBLEMS Geometria nalítica 1) Sejam π 1 e π os planos de equações, respectivamente, x + y + z = e x y + z = 1. Seja r a reta formada pela interseção
MT0146 - CÁLCULO PR ECONOMI SEMESTRE DE 016 LIST DE PROBLEMS Geometria nalítica 1) Sejam π 1 e π os planos de equações, respectivamente, x + y + z = e x y + z = 1. Seja r a reta formada pela interseção
INSTITUTO DE MATEMÁTICA - UFBA DEPARTAMENTO DE MATEMÁTICA 2 a LISTA DE EXERCÍCIOS DE MAT CÁLCULO II-A. Última atualização:
 INSTITUTO DE MATEMÁTICA - UFBA DEPARTAMENTO DE MATEMÁTICA a LISTA DE EXERCÍCIOS DE MAT 4 - CÁLCULO II-A Última atualização: --4 ) Nos problemas a seguir encontre a área das regiões indicadas: A) Interior
INSTITUTO DE MATEMÁTICA - UFBA DEPARTAMENTO DE MATEMÁTICA a LISTA DE EXERCÍCIOS DE MAT 4 - CÁLCULO II-A Última atualização: --4 ) Nos problemas a seguir encontre a área das regiões indicadas: A) Interior
Cálculo diferencial de Funções de mais de uma variável
 MATERIAL DIDÁTICO Professora Sílvia Victer CÁLCULO 2 Cálculo diferencial de Funções de mais de uma variável 1. Funções de mais de uma variável 2. Limites de funções de mais de uma variável 3. Continuidade
MATERIAL DIDÁTICO Professora Sílvia Victer CÁLCULO 2 Cálculo diferencial de Funções de mais de uma variável 1. Funções de mais de uma variável 2. Limites de funções de mais de uma variável 3. Continuidade
1. Em cada caso, obtenha a equação e esboce o grá co da circunferência.
 3. AS CÔNICAS CÁLCULO VETORIAL - 2017.2 3.1 A circunferência 1. Em cada caso, obtenha a equação e esboce o grá co da circunferência. (a) Centro C ( 2; 1) e raio r = 5: (b) Passa pelos pontos A (5; 1) ;
3. AS CÔNICAS CÁLCULO VETORIAL - 2017.2 3.1 A circunferência 1. Em cada caso, obtenha a equação e esboce o grá co da circunferência. (a) Centro C ( 2; 1) e raio r = 5: (b) Passa pelos pontos A (5; 1) ;
Capítulo Coordenadas no Espaço. Seja E o espaço da Geometria Euclidiana tri-dimensional.
 Capítulo 9 1. Coordenadas no Espaço Seja E o espaço da Geometria Euclidiana tri-dimensional. Um sistema de eixos ortogonais OXY Z em E consiste de três eixos ortogonais entre si OX, OY e OZ com a mesma
Capítulo 9 1. Coordenadas no Espaço Seja E o espaço da Geometria Euclidiana tri-dimensional. Um sistema de eixos ortogonais OXY Z em E consiste de três eixos ortogonais entre si OX, OY e OZ com a mesma
MAT Poli Roteiro de Estudos sobre as Cônicas
 MAT25 - Poli - 2003 Roteiro de Estudos sobre as Cônicas Martha Salerno Monteiro Departamento de Matemática IME-USP Uma equação quadrática em duas variáveis é uma equação da forma a + by 2 + cxy + dx +
MAT25 - Poli - 2003 Roteiro de Estudos sobre as Cônicas Martha Salerno Monteiro Departamento de Matemática IME-USP Uma equação quadrática em duas variáveis é uma equação da forma a + by 2 + cxy + dx +
Coordenadas Cartesianas
 1 Coordenadas Cartesianas 1.1 O produto cartesiano Para compreender algumas notações utilizadas ao longo deste texto, é necessário entender o conceito de produto cartesiano, um produto entre conjuntos
1 Coordenadas Cartesianas 1.1 O produto cartesiano Para compreender algumas notações utilizadas ao longo deste texto, é necessário entender o conceito de produto cartesiano, um produto entre conjuntos
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia de Computação 03 de Julho de Prof o. E.T.
 Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia de Computação 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M é
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia de Computação 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M é
Matemática I Cálculo I Unidade B - Cônicas. Profª Msc. Débora Bastos. IFRS Campus Rio Grande FURG UNIVERSIDADE FEDERAL DO RIO GRANDE
 Unidade B - Cônicas Profª Msc. Débora Bastos IFRS Campus Rio Grande FURG UNIVERSIDADE FEDERAL DO RIO GRANDE 22 12. Cônicas São chamadas cônicas as curvas resultantes do corte de um cone duplo com um plano.
Unidade B - Cônicas Profª Msc. Débora Bastos IFRS Campus Rio Grande FURG UNIVERSIDADE FEDERAL DO RIO GRANDE 22 12. Cônicas São chamadas cônicas as curvas resultantes do corte de um cone duplo com um plano.
(b) a quantidade de cloro no tanque no instante t;
 a quantidade de cloro no tanque no instante t;") NOME: Universidade Federal do Rio de Janeiro Instituto de Matemtica Departamento de Mtodos Matemticos Gabarito da a Prova de Cálculo II - 06//0 a QUESTÃO : Um tanque possui 0 litros de solução com cloro
NOME: Universidade Federal do Rio de Janeiro Instituto de Matemtica Departamento de Mtodos Matemticos Gabarito da a Prova de Cálculo II - 06//0 a QUESTÃO : Um tanque possui 0 litros de solução com cloro
UNIVERSIDADE FEDERAL DE PERNAMBUCO
 CÁLCULO L1 NOTAS DA QUINTA AULA UNIVERSIDADE FEDERAL DE PERNAMBUCO Resumo. Iniciamos a aula definindo as funções trigonométricas e estabelecendo algumas de suas propriedades básicas. A seguir, calcularemos
CÁLCULO L1 NOTAS DA QUINTA AULA UNIVERSIDADE FEDERAL DE PERNAMBUCO Resumo. Iniciamos a aula definindo as funções trigonométricas e estabelecendo algumas de suas propriedades básicas. A seguir, calcularemos
Extensão da tangente, secante, cotangente e cossecante, à reta.
 UFF/GMA Notas de aula de MB-I Maria Lúcia/Marlene 05- Trigonometria - Parte - Tan-Cot_Sec-Csc PARTE II TANGENTE COTANGENTE SECANTE COSSECANTE Agora estudaremos as funções tangente, cotangente, secante
UFF/GMA Notas de aula de MB-I Maria Lúcia/Marlene 05- Trigonometria - Parte - Tan-Cot_Sec-Csc PARTE II TANGENTE COTANGENTE SECANTE COSSECANTE Agora estudaremos as funções tangente, cotangente, secante
Cálculo 3A Lista 4. Exercício 1: Seja a integral iterada. I = 1 0 y 2
 Eercício : Seja a integral iterada Universidade Federal Fluminense Instituto de Matemática e Estatística Departamento de Matemática Aplicada Cálculo A Lista 4 I = ddd. a) Esboce o sólido cujo volume é
Eercício : Seja a integral iterada Universidade Federal Fluminense Instituto de Matemática e Estatística Departamento de Matemática Aplicada Cálculo A Lista 4 I = ddd. a) Esboce o sólido cujo volume é
Aula Orientação do espaço. Observação 1
 Aula 14 Nesta aula vamos definir dois novos produtos entre vetores do espaço, o produto vetorial e o produto misto. Para isso, primeiro vamos apresentar o conceito de orientação. 1. Orientação do espaço
Aula 14 Nesta aula vamos definir dois novos produtos entre vetores do espaço, o produto vetorial e o produto misto. Para isso, primeiro vamos apresentar o conceito de orientação. 1. Orientação do espaço