SCILAB: MÓDULO 4 SISTEMAS E CONTROLE
|
|
|
- Leandro Coimbra Malheiro
- 7 Há anos
- Visualizações:
Transcrição


1 SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab Dr.ª Eng.ª Mariana Santos Matos Cavalca





2 O que é controlar?
3 Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios) 3
4 Função de Transferência: breve definição Aplicando-se a Transformada de Laplace (condições iniciais nulas): Definindo-se os polinômios: Temos 4
5 Polinômios Para declarar o polinômio P(s)=s^2-3s+2=(s-1)(s-2), existem quatro formas: Pelas raízes: p = poly([ 1 2 ], 's') Pelos coeficientes: p = poly([ ], 's', 'coeff ' ) (os coeficiente devem ser colocados do menor grau para o maior); Criando a variável: s = poly(0, s ); p = s^2-3*s+2 Utilizando a variável %s: p = %s^2-3*%s+2

6 Polinômios
7 Definição de Sistemas Lineares
8 Definição de Sistemas Lineares
9 Polos e Zeros: breve definição As raízes de são chamadas de zeros da função de transferência As raízes de são chamadas de polos da função de transferência, e este polinômio é conhecido como polinômio característico do sistema A representação gráfica para polos é um x, enquanto que para zeros é o. 9
")
10 Polos e Zeros: comando plzr() 10

11 Realimentação Negativa
12 Realimentação Negativa: feedback
13 Realimentação Negativa: feedback
14 Expansão em Frações Parciais Não expande polos complexo conjugados nem polos múltiplos!
15 Estabilidade de Sistemas Lineares Invariantes no Tempo: Critério de Routh Critério BIBO (bounded input bounded output): Um sistema linear, invariante no tempo e inicialmente em repouso, é estável quando sua resposta a qualquer entrada de amplitude finita for também de amplitude finita. Caso contrário, o sistema é instável. Como consequência da definição, temos que matematicamente, sistemas estáveis são aqueles que apresentam somente polos no semi-plano esquerdo do plano complexo. O critério estabilidade de Routh, ou critério de Routh-Hurwitz permite determinar a existência e o número de polos fora do semi-plano esquerdo, sem a necessidade de se encontrar as raízes do polinômio característico.
16 Estabilidade de Sistemas Lineares Invariantes no Tempo: Critério de Routh
17 Tabela do Critério de Routh
18 Tabela do Critério de Routh
19 Resposta a uma entrada do tipo degrau: csim( step,t,ft)
20 Resposta a uma entrada do tipo degrau: csim( step,t,ft) É possível adicionar um datatip!

21 Resposta a uma entrada qualquer: deff()
22 Diagrama do Lugar das Raízes
23 Diagrama do Lugar das Raízes
24 Diagrama do Lugar das Raízes
25 Diagrama do Lugar das Raízes

26 Diagrama do Lugar das Raízes Realimentação negativa Realimentação positiva
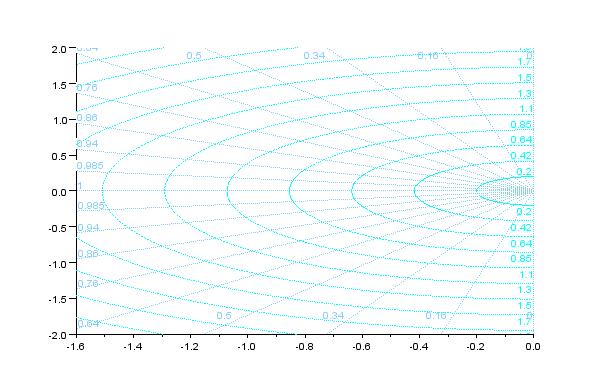
27 sgrid()
28 Resposta em Frequência: Diagrama de Bode A resposta em frequência de um sistema é a parcela forçada da resposta desse sistema a uma excitação do tipo: Veremos que essa resposta assume a forma: A resposta em frequência é muitas vezes expressa na forma de um gráfico duplo, conhecido como diagrama de Bode. Esse gráfico relaciona o ganho e a fase do sistema com a frequência da excitação.

29 Resposta em Frequência: Diagrama de Bode Note que está em Hz!!!
30 Resposta em Frequência: Diagrama de Bode Agora edite o xlabel!!!
31 Resposta em Frequência: Diagrama de Bode

32 Resposta em Frequência: Diagrama de Nyquist

33 Resposta em Frequência: Diagrama de Nyquist
34 Controle Moderno: Espaço de Estados 1. tf2ss e ss2tf conversão entre função de transferência e espaço de estados; 2. contr e obsv_mat determinam as matrizes de controlabilidade e de obervabilidade; 3. ppol alocador de polos; 4. Ver mais na aba CACSD do help!
35 Controle Discreto
36 Exercício: Dada a seguinte função de transferência: 1. Analise a estabilidade BIBO em malha aberta e em malha fechada com ganho unitário (verifique se todos os polos estão no SPE); 2. Plote a resposta ao degrau unitário para o sistema em MA e em MF; 3. Trace o lugar das raízes. Explore a modificação da localização dos polos de malha fechada com a alteração do ganho K; 4. Trace o diagrama de bode. Altere a escala para rad/s.
37 SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Obrigada! Bom estudo! Dr.ª Eng.ª Mariana Santos Matos Cavalca Alguns exemplos e textos introdutórios foram retirados de: 1. Maya, P. A. e Leonardi, F. Controle Essencial. Person, Notas de aula do Prof. Eduardo Cavalca (MEC).
IV. ESTABILIDADE DE SISTEMAS LIT
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos ([email protected]) Departamento de
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE IV. ESTABILIDADE DE SISTEMAS LIT Prof. Davi Antônio dos Santos ([email protected]) Departamento de
Indice. Resposta forçada (condições iniciais nulas)
") Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Indice 3.3 Inversão da TLP Fracções parciais Resolução equações diferenciais Polinómio característico Estabilidade resposta natural 3.4 Função de Transferência Estabilidade devido à entrada (resposta forçada)
Capítulo 2 Dinâmica de Sistemas Lineares
 Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Capítulo 2 Dinâmica de Sistemas Lineares Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Dinâmica de Sistemas Lineares 1/57
Sumário. CAPÍTULO 1 Introdução 1. CAPÍTULO 2 Terminologia dos Sistemas de Controle 14
 Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Sumário CAPÍTULO 1 Introdução 1 1.1 Sistemas de controle 1 1.2 Exemplos de sistemas de controle 2 1.3 Sistemas de controle de malha aberta e malha fechada 3 1.4 Realimentação 3 1.5 Características da realimentação
Controle de Processos Aula: Estabilidade e Critério de Routh
 107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
107484 Controle de Processos Aula: Estabilidade e Critério de Routh Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB)
Pólos, Zeros e Estabilidade
 Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
Pólos, Zeros e Estabilidade Definindo Estabilidade A condição para estabilidade pode também ser expressa da seguinte maneira: se um sistema é estável quando sujeito a um impulso, a saída retoma a zero.
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA. Sistemas
 INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
INSTITUTO FEDERAL DO ESPÍRITO SANTO - CAMPUS SERRA Sistemas Dinâmicos Para controlar é preciso conhecer Sistemas dinâmicos Modificam-se no decorrer do tempo Modelos matemáticos Método analítico (Leis físicas)
CA2COD1: COD CONTROLE DIGITAL. Profa. Mariana Cavalca
 CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
CA2COD1: COD CONTROLE DIGITAL Profa. Mariana Cavalca Currículo Resumido Curso Técnico em Eletro-Eletrônica ETEP (São José dos Campos - SP) Iniciação científica (estatística) Estágio Empresa ITA júnior:
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE
 RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
RESPOSTA EM FREQUÊNCIA: DIAGRAMA DE BODE CCL Profa. Mariana Cavalca Baseado em: MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle
Critério de Estabilidade: Routh-Hurwitz
 Critério de Estabilidade: Routh-Hurwitz O Critério de Nyquist foi apresentado anteriormente para determinar a estabilidade de um sistema em malha fechada analisando-se sua função de transferência em malha
Critério de Estabilidade: Routh-Hurwitz O Critério de Nyquist foi apresentado anteriormente para determinar a estabilidade de um sistema em malha fechada analisando-se sua função de transferência em malha
Aula 9. Carlos Amaral Cristiano Quevedo Andrea. UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica
 Aula 9 Carlos Amaral Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Abril de 2012. Resumo 1 Introdução - Estabilidade
Aula 9 Carlos Amaral Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Abril de 2012. Resumo 1 Introdução - Estabilidade
SC1 Sistemas de Controle 1. Cap. 2 - Estabilidade Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 2 - Estabilidade Prof. Tiago S Vítor Sumário 1. Introdução 2. Critério de Routh-Hurwitz 3. Critério de Routh-Hurwitz: Casos Especiais 4. Projeto de Estabilidade via Routh-Hurwitz
SC1 Sistemas de Controle 1 Cap. 2 - Estabilidade Prof. Tiago S Vítor Sumário 1. Introdução 2. Critério de Routh-Hurwitz 3. Critério de Routh-Hurwitz: Casos Especiais 4. Projeto de Estabilidade via Routh-Hurwitz
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica. Sistemas de Controle Realimentados
 Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da
Margens de Estabilidade Introdução Margens de Fase e de Ganho Exemplos Problemas Propostos 1 Margens de Estabilidade Definições: Diz-se que um sistema LTI é absolutamente estável se todas as raízes da
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Conteúdo. Definições básicas;
 Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
Conteúdo Definições básicas; Caracterização de Sistemas Dinâmicos; Caracterização dinâmica de conversores cc-cc; Controle Clássico x Controle Moderno; Campus Sobral 2 Engenharia de Controle Definições
EES-49/2012 Correção do Exame. QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência:
 EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
EES-49/2012 Correção do Exame QBM1 Esboce o diagrama de Nyquist para a seguinte função de transferência: Analise a estabilidade do sistema em malha fechada (dizendo quantos polos instáveis o sistema tem
Sistemas de controle. Prof. André Schneider de Oliveira
 Sistemas de controle Prof. André Schneider de Oliveira Estrutura da apresentação Conceitos fundamentais do sistemas de controle Características da resposta Introdução à estabilidade Polos e zeros Conceito
Sistemas de controle Prof. André Schneider de Oliveira Estrutura da apresentação Conceitos fundamentais do sistemas de controle Características da resposta Introdução à estabilidade Polos e zeros Conceito
ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA
 VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
VIII- CAPÍTULO VIII ANÁLISE DO MÉTODO DA RESPOSTA EM FREQÜÊNCIA 8.- INTRODUÇÃO O método da resposta em freqüência, nada mais é que a observação da resposta de um sistema, para um sinal de entrada senoidal,
Estabilidade entrada-saída (externa).
.") Estabilidade entrada-saída (externa) ENGC33: Sinais e Sistemas II Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 05 de junho de 2019 Prof Tito Luís Maia Santos 1/ 38 Sumário
Estabilidade entrada-saída (externa) ENGC33: Sinais e Sistemas II Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 05 de junho de 2019 Prof Tito Luís Maia Santos 1/ 38 Sumário
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes [email protected] 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes [email protected] 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
SISTEMAS DE CONTROLE I Capítulo 6 - Estabilidade. Prof. M.e Jáder de Alencar Vasconcelos
 SISTEMAS DE CONTROLE I Capítulo 6 - Estabilidade Prof. M.e Jáder de Alencar Vasconcelos CAPÍTULO 6 INTRODUÇÃO INTRODUÇÃO No Capítulo 1, vimos que três requisitos fazem parte do projeto de um sistema de
SISTEMAS DE CONTROLE I Capítulo 6 - Estabilidade Prof. M.e Jáder de Alencar Vasconcelos CAPÍTULO 6 INTRODUÇÃO INTRODUÇÃO No Capítulo 1, vimos que três requisitos fazem parte do projeto de um sistema de
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace
 Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. [email protected] Prof. Rafael Concatto Beltrame, Me.
Sinais e Sistemas Unidade 5 Representação em domínio da frequência para sinais contínuos: Transformada de Laplace Prof. Cassiano Rech, Dr. Eng. [email protected] Prof. Rafael Concatto Beltrame, Me.
Controle e Sistemas Não lineares
 Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
Controle e Sistemas Não lineares Prof. Marcus V. Americano da Costa F o Departamento de Engenharia Química Universidade Federal da Bahia Salvador-BA, 01 de dezembro de 2016. Sumário Objetivos Introduzir
J. A. M. Felippe de Souza 10 Estabilidade. 10 Estabilidade
 J. A. M. Felippe de Souza 10 Estabilidade 10 Estabilidade 10.1 Introdução à Estabilidade 3 Definição 10.1 Estabilidade 3 Definição 10.2 - BIBO-estável 3 Teorema 10.1 Localização dos polos 4 Exemplo 10.1
J. A. M. Felippe de Souza 10 Estabilidade 10 Estabilidade 10.1 Introdução à Estabilidade 3 Definição 10.1 Estabilidade 3 Definição 10.2 - BIBO-estável 3 Teorema 10.1 Localização dos polos 4 Exemplo 10.1
EES-20: Sistemas de Controle II. 20 Outubro 2017 (Tarde)
") EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
EES-20: Sistemas de Controle II 20 Outubro 2017 (Tarde) 1 / 58 Recapitulando: Modelo da planta amostrada G z G c s u k u t y t y k T T G(z) = (1 z 1 ) Z { } G c (s) s Importante: Trata-se de discretização
Estabilidade de sistemas de controle lineares invariantes no tempo
 Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Capítulo 2 Estabilidade de sistemas de controle lineares invariantes no tempo 2. Introdução Neste capítulo, vamos definir alguns conceitos relacionados à estabilidade de sistemas lineares invariantes no
Estabilidade de Sistemas Lineares Realimentados
 Estabilidade de Sistemas Lineares Realimentados 1. Conceito de estabilidade 2. Critério de estabilidade de Routh-Hurwitz p.1 Engenharia de Controle Aula 6 Estabilidade de Sistemas Lineares Realimentados
Estabilidade de Sistemas Lineares Realimentados 1. Conceito de estabilidade 2. Critério de estabilidade de Routh-Hurwitz p.1 Engenharia de Controle Aula 6 Estabilidade de Sistemas Lineares Realimentados
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA
 CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
R + b) Determine a função de transferência de malha fechada, Y (s)
 Determine a função de transferência de malha fechada, Y (s)") FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
FUP IC Teoria do Controlo xercícios Análise de Sistemas ealimentados Teoria do Controlo xercícios Análise de Sistemas ealimentados AS Considere o sistema da figura ao lado: a) Determine a função de transferência
= + Exercícios. 1 Considere o modelo simplificado de um motor DC:
 7 Exercícios 1 Considere o modelo simplificado de um motor DC: a) Deduza, utilizando a definição, o seu equivalente discreto ZOH. b) Confirme a validade da expressão obtida com o resultado listado na tabela
7 Exercícios 1 Considere o modelo simplificado de um motor DC: a) Deduza, utilizando a definição, o seu equivalente discreto ZOH. b) Confirme a validade da expressão obtida com o resultado listado na tabela
CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
 PETROBRAS ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELETRÔNICA ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELÉTRICA ENGENHEIRO(A) JÚNIOR - ÁREA: AUTOMAÇÃO CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
PETROBRAS ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELETRÔNICA ENGENHEIRO(A) DE EQUIPAMENTOS JÚNIOR - ELÉTRICA ENGENHEIRO(A) JÚNIOR - ÁREA: AUTOMAÇÃO CONTROLE LINEAR CONTÍNUO: PRINCÍPIOS E LUGAR DAS RAÍZES
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
AULA 3. CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 3 CRITÉRIO DE ESTABILIDADE DE Routh-Hurwitz PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA Critério de estabilidade de Routh A questão
O Papel dos Pólos e Zeros
 Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Departamento de Engenharia Mecatrônica - EPUSP 27 de setembro de 2007 1 Expansão em frações parciais 2 3 4 Suponha a seguinte função de transferência: m l=1 G(s) = (s + z l) q i=1(s + z i )(s + p m ),
Fundamentos de Controlo
 Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Fundamentos de Controlo 3 a Série Estabilidade e Desempenho, Critério de Routh-Hurwitz, Rejeição de Perturbações, Sensibilidade à Variação de Parâmetros, Erros em Regime Estacionário. S3. Exercícios Resolvidos
Representação e Análise de Sistemas Dinâmicos Lineares Componentes Básicos de um Sistema de Controle
 Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Representação e Análise de Sistemas Dinâmicos Lineares 1 Introdução 11 Componentes Básicos de um Sistema de Controle Fundamentos matemáticos 1 Singularidades: Pólos e zeros Equações diferencias ordinárias
Princípios de Controle Robusto
 Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Princípios de Controle Robusto ENGA71: Análise e Projeto de Sistemas de Controle Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 27 de junho de 2018 Sumário 1 Introdução
Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos, polos e zeros Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 2 o Semestre
23/04/2018. Estabilidade de Circuitos com AMPOP
 Estabilidade de Circuitos com AMPOP 1 Estabilidade de Circuitos com AMPOP Função de transferência em malha fechada Hipóteses: ganho CC constante pólos e zeros em altas freqüências (s) constante em baixas
Estabilidade de Circuitos com AMPOP 1 Estabilidade de Circuitos com AMPOP Função de transferência em malha fechada Hipóteses: ganho CC constante pólos e zeros em altas freqüências (s) constante em baixas
Diagrama do Lugar Geométrico das Raízes
 Diagrama do Lugar Geométrico das Raízes Objetivos: Estudar a aplicação de ferramentas de apoio à engenharia tais como Matlab e Scilab para o traçado do diagrama do Lugar das Raízes. Introdução O método
Diagrama do Lugar Geométrico das Raízes Objetivos: Estudar a aplicação de ferramentas de apoio à engenharia tais como Matlab e Scilab para o traçado do diagrama do Lugar das Raízes. Introdução O método
PROJETO DE CONTROLADORES A PARTIR DO PLANO S. critério Routh-Hurwitz análise de estabilidade análise de desempenho
 PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
PROJETO DE CONTROLADORES A PARTIR DO PLANO S critério Routh-Hurwitz análise de estabilidade análise de desempenho Critério Routh-Hurwitz: análise da estabilidade Sistemas de primeira ordem: 1 x o (t)=
Universidade Federal do Rio de Janeiro. Circuitos Elétricos I EEL 420. Módulo 11
 Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
SUMÁRIO BACKGROUND. Referências 62 MATLAB Seção B: Operações Elementares 62 Problemas 71
 SUMÁRIO BACKGROUND B.l Números Complexos 17 B.l-l Nota Histórica 17 B.I-2 Álgebra de Números Complexos 20 B.2 Senóides 30 B.2-1 Adição de Senóides 31 B.2-2 Senóides em Termos de Exponenciais: A Fórmula
SUMÁRIO BACKGROUND B.l Números Complexos 17 B.l-l Nota Histórica 17 B.I-2 Álgebra de Números Complexos 20 B.2 Senóides 30 B.2-1 Adição de Senóides 31 B.2-2 Senóides em Termos de Exponenciais: A Fórmula
Universidade Federal do Rio de Janeiro. Circuitos Elétricos I EEL 420. Módulo 11
 Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Universidade Federal do Rio de Janeiro Circuitos Elétricos I EEL 420 Módulo Laplace Bode Fourier Conteúdo - Transformada de Laplace.... - Propriedades básicas da transformada de Laplace....2 - Tabela de
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist
 Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap6 Estabilidade Prof. Filipe Fraga Sistemas de Controle 1 6. Estabilidade 6.1 Introdução 6.2 Critério de Routh-Hurwitz
EN2607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 3 quadrimestre 2012
 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 fevereiro 03 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 3 quadrimestre 0
EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 fevereiro 03 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 3 3 quadrimestre 0
Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab
 Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab I Análise de sistema com atraso Considere o sistema realimentado da figura (exercício da aula prática nº 1) e Ts G p onde era indicado que a planta
Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab I Análise de sistema com atraso Considere o sistema realimentado da figura (exercício da aula prática nº 1) e Ts G p onde era indicado que a planta
Transformada de Laplace
 Sinais e Sistemas Transformada de Laplace [email protected] Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
Sinais e Sistemas Transformada de Laplace [email protected] Instituto Superior Técnico Sinais e Sistemas p.1/60 Resumo Definição da transformada de Laplace. Região de convergência. Propriedades da transformada
REPÚBLICA FEDERATIVA DO BRASIL ESTADO DE SANTA CATARINA Universidade do Estado de Santa Catarina - UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS - UDESC/CCT
 Curso: ELE-ELE - Bacharelado em Engenharia Elétrica Departamento: DEE - Engenharia Elétrica Disciplina: null Código: ISC0001 Carga horária: 90 Período letivo: 2017/2 Professor: Celso José Faria de Araújo
Curso: ELE-ELE - Bacharelado em Engenharia Elétrica Departamento: DEE - Engenharia Elétrica Disciplina: null Código: ISC0001 Carga horária: 90 Período letivo: 2017/2 Professor: Celso José Faria de Araújo
Aula 04 Representação de Sistemas
 Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Estabilidade. 1. Estabilidade Entrada-Saída Sistemas LIT. 2. Estabilidade BIBO Sistemas LIT. 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT
 Estabilidade 1. Estabilidade Entrada-Saída Sistemas LIT 2. Estabilidade BIBO Sistemas LIT 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT 4. Sistemas Discretos LIT 5. Estabilidade BIBO Sistemas
Estabilidade 1. Estabilidade Entrada-Saída Sistemas LIT 2. Estabilidade BIBO Sistemas LIT 3. Estabilidade BIBO de Equações Dinâmicas Sistemas LIT 4. Sistemas Discretos LIT 5. Estabilidade BIBO Sistemas
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA
 OGATA") RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
Critério de Estabilidade de Routh-Hurwitz
 Critério de Estabilidade de Routh-Hurwitz Carlos Eduardo de Brito Novaes carlosnovaes@aeducom http://professorcarlosnovaeswordpresscom de agosto de 1 1 Introdução Edward Routh apresentou em 1877 um algorítimo
Critério de Estabilidade de Routh-Hurwitz Carlos Eduardo de Brito Novaes carlosnovaes@aeducom http://professorcarlosnovaeswordpresscom de agosto de 1 1 Introdução Edward Routh apresentou em 1877 um algorítimo
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA. Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva 1. K. Ogata: Engenharia de Controle Moderno, 5 Ed., Pearson, 2011 2.
I Controle Contínuo 1
 Sumário I Controle Contínuo 1 1 Introdução 3 1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada................ 5 1.2 Componentes de um sistema de controle............................ 5 1.3 Comparação
Sumário I Controle Contínuo 1 1 Introdução 3 1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada................ 5 1.2 Componentes de um sistema de controle............................ 5 1.3 Comparação
6-Análise de estabilidade de sistemas feedback 6.1- Noções de estabilidade
 6-Análise de estabilidade de sistemas feedback 6.- Noções de estabilidade Nos capítulos anteriores examinamos as características dinâmicas da resposta de sistemas em malha fechada e desenvolvemos a função
6-Análise de estabilidade de sistemas feedback 6.- Noções de estabilidade Nos capítulos anteriores examinamos as características dinâmicas da resposta de sistemas em malha fechada e desenvolvemos a função
Resposta dinâmica. Prof. Alan Petrônio Pinheiro Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica
 Capítulo 6*: Resposta dinâmica Prof. Alan Petrônio Pinheiro Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica [email protected] *Baseado no capítulo 3 do livro texto: Sistemas de Controle
Capítulo 6*: Resposta dinâmica Prof. Alan Petrônio Pinheiro Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica [email protected] *Baseado no capítulo 3 do livro texto: Sistemas de Controle
Controle de Processos Aula: Sistemas de 1ª e 2ª ordem
 107484 Controle de Processos Aula: Sistemas de 1ª e 2ª ordem Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistemas de 1ª e 2ª ordem Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti (UnB) Controle
Aula 18: Projeto de controladores no domínio da frequência
 Aula 18: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei [email protected] 26 de outubro de 2017. prof. Dr. Eduardo Bento Pereira
Aula 18: Projeto de controladores no domínio da frequência prof. Dr. Eduardo Bento Pereira Universidade Federal de São João del-rei [email protected] 26 de outubro de 2017. prof. Dr. Eduardo Bento Pereira
Introdução ao software Scilab
 Introdução ao software Scilab Objetivos: Introduzir os conceitos e comandos fundamentais do programa Scilab e da sua ferramenta XCOS. Tal estudo será voltado para aplicações de Sistemas de Controle. Introdução
Introdução ao software Scilab Objetivos: Introduzir os conceitos e comandos fundamentais do programa Scilab e da sua ferramenta XCOS. Tal estudo será voltado para aplicações de Sistemas de Controle. Introdução
A Transformada de Laplace
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE DEPARTAMENTO DO DESENVOLVIMENTO DO ENSINO
EN2607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares 2 2 quadrimestre 2011
 EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares quadrimestre 0 (P-0003D) (HAYKIN, 00, p 9) Use a equação de definição da TF para obter a representação no domínio da
EN607 Transformadas em Sinais e Sistemas Lineares Lista de Exercícios Suplementares quadrimestre 0 (P-0003D) (HAYKIN, 00, p 9) Use a equação de definição da TF para obter a representação no domínio da
Aula 6 Transformada de Laplace
 Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Aula 6 Transformada de Laplace Introdução Propriedades da Transformada de Laplace Tabela Transformada ade Laplace Transformada Inversa de Laplace Função de transferência Definição: X s = L x t = s é uma
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência 1. Motivação 2. Mapas de contorno no Plano-s 3. Critério de Nyquist pag.1 Controle de Sistemas Lineares Aula 16 Estabilidade no Domínio da Freqüência Como analisar
Estabilidade no Domínio da Freqüência 1. Motivação 2. Mapas de contorno no Plano-s 3. Critério de Nyquist pag.1 Controle de Sistemas Lineares Aula 16 Estabilidade no Domínio da Freqüência Como analisar
I Controle Contínuo 1
 Sumário I Controle Contínuo 1 1 Introdução 3 1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada................ 5 1.2 Componentes de um sistema de controle............................ 5 1.3 Comparação
Sumário I Controle Contínuo 1 1 Introdução 3 1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada................ 5 1.2 Componentes de um sistema de controle............................ 5 1.3 Comparação
SC1 Sistemas de Controle 1. Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
SC1 Sistemas de Controle 1 Cap. 3 Erros no Regime Estacionário Prof. Tiago S Vítor Sumário 1. Introdução 2. Erro em regime estacionário de sistemas com realimentação unitária 3. Constantes de Erro Estático
Sistemas lineares. Aula 7 Transformada Inversa de Laplace
 Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
Sistemas lineares Aula 7 Transformada Inversa de Laplace Transformada Inversa de Laplace Transformada Inversa de Laplace e RDC x(t) única Metódos Inversão pela Definição Inversão pela Expansão em Frações
EES-49/2012 Prova 1. Q1 Dado o seguinte conjunto de equações:
 Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
Q1 Dado o seguinte conjunto de equações: EES-49/2012 Prova 1 Onde: h C é o sinal de entrada do sistema; θ é o sinal de saída do sistema; T P é uma entrada de perturbação; T T, T R e h R são variáveis intermediárias;
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Instrumentação e Controle Aula 7. Estabilidade. Prof. Renato Watanabe ESTO004-17
 Instrumentação e Controle Aula 7 Estabilidade Prof. Renato Watanabe ESTO004-17 Onde estamos no curso Sistema Obtenção das Equações Diferenciais que descrevem o comportamento do sistema Representação no
Instrumentação e Controle Aula 7 Estabilidade Prof. Renato Watanabe ESTO004-17 Onde estamos no curso Sistema Obtenção das Equações Diferenciais que descrevem o comportamento do sistema Representação no
Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos
 107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
107484 Controle de Processos Aula: Função de transferência, diagrama de blocos e pólos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016
Sistemas e Sinais. Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
 O método das frações parciais usa o conhecimento de diversos pares de transformada Z básicos e as propriedades da transformada Z para obtenção da transformada Z inversa das funções de interesse Admite-se
O método das frações parciais usa o conhecimento de diversos pares de transformada Z básicos e as propriedades da transformada Z para obtenção da transformada Z inversa das funções de interesse Admite-se
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace
 Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
Aula 05 Transformadas de Laplace Pierre Simon Laplace (1749-1827) As Transformadas de Laplace apresentam uma representação de sinais no domínio da frequência em função de uma variável s que é um número
O critério de Nyquist
 O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
O critério de Nyquist Critério de análise de estabilidade de sistemas dinâmicos lineares com realimentação negativa. Usa a função de transferência em malha aberta (antes da realimentação). É uma aplicação
6 Controlador de Estado
 6 Controlador de Estado Apresenta-se a seguir o método para implementação do sistema de controle por estados (Ogata, 1990). Considera-se agora o sistema representado em sua forma de estado: (25) cujo o
6 Controlador de Estado Apresenta-se a seguir o método para implementação do sistema de controle por estados (Ogata, 1990). Considera-se agora o sistema representado em sua forma de estado: (25) cujo o
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes [email protected] http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes [email protected] http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes [email protected] http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes [email protected] http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Análise de Sistemas em Tempo Discreto usando a Transformada Z
 Análise de Sistemas em Tempo Discreto usando a Transformada Z Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do São Francisco
Análise de Sistemas em Tempo Discreto usando a Transformada Z Edmar José do Nascimento (Análise de Sinais e Sistemas) http://www.univasf.edu.br/ edmar.nascimento Universidade Federal do Vale do São Francisco
Pontifícia Universidade Católica de Goiás Escola de Engenharia. Aluno (a): Aula Laboratório 11 Cap 6 Estabilidade
: Aula Laboratório 11 Cap 6 Estabilidade") Pontifícia Universidade Católica de Goiás Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Filipe Fraga 11 Aluno (a): Aula Laboratório 11 Cap 6 Estabilidade 1- Considerações teóricas:
Pontifícia Universidade Católica de Goiás Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Filipe Fraga 11 Aluno (a): Aula Laboratório 11 Cap 6 Estabilidade 1- Considerações teóricas:
Nyquist, Função de Sensibilidade e Desempenho Nominal
 Nyquist, Função de Sensibilidade e Desempenho Nominal 1. Revisitando o critério de estabilidade de Nyquist 1.1. Margens de ganho e de fase 2. Erro de rastreamento e função de sensibilidade 2.1. Vetor de
Nyquist, Função de Sensibilidade e Desempenho Nominal 1. Revisitando o critério de estabilidade de Nyquist 1.1. Margens de ganho e de fase 2. Erro de rastreamento e função de sensibilidade 2.1. Vetor de