Controlo em Espaço de Estados
|
|
|
- Vanessa Peres
- 5 Há anos
- Visualizações:
Transcrição
1 1 Controlo em Espaço de Estados 2015/ a) x x 1 João Miranda Lemos Professor Catedrático
2 Corpo Docente 2 João Miranda Lemos (Teóricas, Responsável pela Disciplina) jlml@inesc-id.pt , Gabinete no INESC-ID Para dúvidas: Enviar ou telefonar para combinar hora. jag@isr.ist.utl.pt José António Gaspar (Laboratórios e Práticas)
3 3 Organização da disciplina Aulas: Teóricas (acetatos em 4 partes, ver fénix) Práticas (problemas das aulas práticas no fénix) Laboratório (enunciado do trabalho no fénix) Auto-estudo: Leitura dos acetatos Problemas para auto-estudo (fénix) Bibliografia
4 4 Avaliação da disciplina Teórica o 2 testes (fortemente recomendado) ou 1 exame o Não há repescagem dos testes o Aprovação: Teórica (média dos testes ou exame) mínima de 9,3 o Não há nota mínima em cada teste. o Tendo aprovação nos testes podem melhorar a nota no exame Laboratório o 1 trabalho, relatório em grupos de 3 ou 4, notas individuais por aluno Nota final o 0,7T+0.3min(L,T+6)
.")
5 5 Laboratório. Projecto e teste de um controlador para a posição de um troço de braço robot flexível. Projecto e simulação com o MATLAB/SIMULINK. Teste com o SIMULINK ligado ao sistema real (prototipagem rápida). Ênfase no projecto e na implementação em computador com verificação experimental Cyber Physical Systems

6 6 Porque escolheram esta disciplina? Mas afinal, esta é, ou não é, a reunião do Sindicato dos Padeiros?
7 7 u O modelo de estado y Modelo entrada/saída (eq. Diferencial ou função de transferência): Alternativa: Duas equações diferenciais de 1ª ordem (modelo de estado) d 2 dt y 2 u dx1 dt x1 ( t) y( t), x2( t) y ( t) dx dt 2 x 2 u
8 8 Estado de um sistema: Conjunto de variáveis tais que, se as conhecermos num dado instante, e se conhecermos as forças externas que actuam sobre o sistema, podemos, integrando as equações de estado, calcular toda a evolução futura do sistema. As variáveis de estado satisfazem um sistema de equações diferenciais de 1ª ordem dito modelo de estado. dx dt = Ax + Bu y = Cx (Modelo da dinâmica e dos actuadores) (Modelo dos sensores)
9 9 Objectivo da disciplina Estudo de métodos de análise e projecto de sistemas de controlo com base no modelo de estado. Programa 1. Análise do modelo de estado; 2. Projecto por controladores de realimentação de variáveis de estado e estimação de estado com observadores; 3. Estabilidade e projecto de controladores para sistemas não lineares; 4. Controlo Óptimo com base no Princípio de Pontryagin.
10 10 O que vamos aprender de novo nesta disciplina? Um novo modelo (modelo de estado: Linear e não linear) Uma nova técnica de estudo da estabilidade (2º Método de Lyapunov) Novas técnicas de projecto de controladores o Realimentação linear de variáveis de estado o Controlo não linear o Controlo óptimo o Controlo multivariável o Controlo adaptativo (aprender com o funcionamento do sistema)
11 11 Grandes ideias do Controlo tratadas na disciplina Modelo de estado. Realimentação de variáveis de Estado Observadores assimptóticos. Filtro de Kalman. 2º Método de Lyapunov Controlo Óptimo. Princípio de Pontryagin


12 12 Quando surgiram estas ideias? Joseph-Louis Lagrange Mecânica Analítica Aleksandr Lyapunov Estabilidade Rudolph Kalman Filtro. Modelo de estado no Controlo
 e o")
13 13 Johann Bernouilli ( ) e o braquistocróno


14 14 L. Euler Cálculo Variacional. Eq. Euler-Lagrange Lev Pontryagin Controlo Óptimo: Princípio do Óptimo


15 Exemplos: Canal de distribuição de água 15 y 1 M1 u 1 u 2 u 3 u 4 M2 M3 M4 y 2 y 3 y 4 Q o Pool 1 G1 Pool 2 G2 Pool 3 G3 Pool 4 G4 Q 1 Q 2 Q 3 Q 4
16 J 3 [mm] J 2 [mm] J 1 [mm] 16 PID s isolados Gate Gate Gate
17 J 4 [mm] J 3 [mm] J 2 [mm] J 1 [mm] 17 Controlo óptimo multivariável do canal com retroacção do estado J. M. Lemos and L. F. Pinto (2012). Distributed Linear-Quadratic Control of Serially Chained Systems -- Application to a Water Delivery Canal. IEEE Control Systems Mag., 32(6): Multivariable Controller u 1 u 2 u m y 1 y 2 y p Plant Gate Gate Gate Gate
 dt Estimar x por observação das medidas de y.")
18 18 Estimação do estado: Localização por GPS dx f ( x) y h( x) dt Estimar x por observação das medidas de y. Observadores

19 19 Campo de colecores solares distribuídos u=caudal y=temperatura Espelho A dinâmica da relação entre o caudal de fluido e a temperatura à saída depende do caudal: Comportamento não linear
: 24-38.")
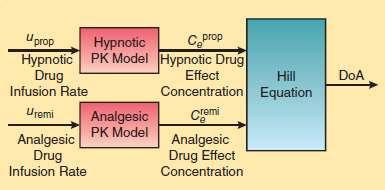
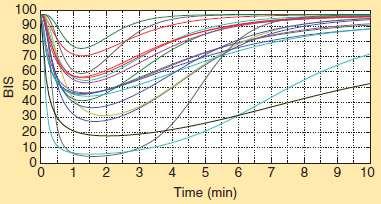
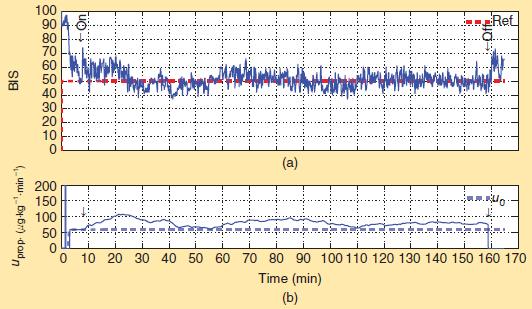
20 20 Controlo da anestesia J. M. Lemos et. Al. (2014). Robust Control of Maintenance Phase Anesthesia. IEEE Control Systems, 34 (6): Disponível na página da disciplina, no Fénix
21 21


22 22 Controlo óptimo para extracção da energia das ondas Fonte: Luis Gato, 2014
23 23 Pôr o conhecimento em acção Esta é uma disciplina em que se estudam bases teóricas Mas muitas podem ser aplicadas directamente numa grande variedade de campos (Medicina, Biotecnologia, Agricultura, Aeroespacial, Mecatrónica Robótica, Energia, Gestão,...) Não há nada mais prático do que uma boa teoria (Boltzman) A comunidade dos makers:
Controlo Em Espaço de Estados. Trabalho de Laboratório nº 3
 Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2008/09 Trabalho de Laboratório nº 3 Controlo Adaptativo do Nível de um Tanque J. Miranda Lemos e Alexandre Bernardino
Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2008/09 Trabalho de Laboratório nº 3 Controlo Adaptativo do Nível de um Tanque J. Miranda Lemos e Alexandre Bernardino
Modelação, Identificação e Controlo Digital
 Modelação, Identificação e Controlo Digital Apresentação 2006/2007 1 Modelação, Identificação e Controlo Digital Semestre de Inverno 2006/2007 Área Científica de Sistemas de Decisão e Controlo Modelação,
Modelação, Identificação e Controlo Digital Apresentação 2006/2007 1 Modelação, Identificação e Controlo Digital Semestre de Inverno 2006/2007 Área Científica de Sistemas de Decisão e Controlo Modelação,
Alexandre Bernardino, Margarida Silveira, J. Miranda Lemos
 Mestrado Integrado em Engenharia Aeroespacial 2009/2010 - Semestre de Inverno Controlo Óptimo e Adaptativo TRABALHO DE LABORATÓRIO Identificação e Controlo Digital do Sistema de Posicionamento de uma Barra
Mestrado Integrado em Engenharia Aeroespacial 2009/2010 - Semestre de Inverno Controlo Óptimo e Adaptativo TRABALHO DE LABORATÓRIO Identificação e Controlo Digital do Sistema de Posicionamento de uma Barra
-GNE219 - Controle em Espaço de Estados
 Universidade Federal de Lavras Departamento de Engenharia -GNE219 - Controle em Espaço de Estados Prof. Daniel Leite E-mail: daniel.leite@deg.ufla.br 2/2017 1/27 Considerações Eng. de Controle e Automação
Universidade Federal de Lavras Departamento de Engenharia -GNE219 - Controle em Espaço de Estados Prof. Daniel Leite E-mail: daniel.leite@deg.ufla.br 2/2017 1/27 Considerações Eng. de Controle e Automação
Controlo Em Espaço de Estados. Trabalho de Laboratório nº 2
 Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 2 Controlo por Retroacção do Estado de um Braço Robot Flexível J. Miranda Lemos
Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 2 Controlo por Retroacção do Estado de um Braço Robot Flexível J. Miranda Lemos
Retroacção Linear de Variáveis de Estado
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas para auto-estudo sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 03 J. M. Lemos,
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas para auto-estudo sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 03 J. M. Lemos,
SEM Sistemas de Controle Aula 1 - Introdução
 SEM 5928 - Sistemas de Controle Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 5928 - Sistemas de Controle Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 0 J. M. Lemos, IST P. Considere
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 0 J. M. Lemos, IST P. Considere
Simulação Dinâmica nos Laboratórios de Engenharia Química V da Licenciatura em Engenharia Química no IST: porquê e como?
 7 de Junho 005 Simulação Dinâmica nos Laboratórios de Engenharia Química V da Licenciatura em Engenharia Química no IST: porquê e como? Carla IC Pinheiro, Ana CL Vieira, José MM Lopes DEQ - Centro de Eng
7 de Junho 005 Simulação Dinâmica nos Laboratórios de Engenharia Química V da Licenciatura em Engenharia Química no IST: porquê e como? Carla IC Pinheiro, Ana CL Vieira, José MM Lopes DEQ - Centro de Eng
Dinâmica de um braço robot flexível
 Modelação e Simulação 011/1 Trabalho de Laboratório nº 3 Dinâmica de um braço robot flexível Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de
Modelação e Simulação 011/1 Trabalho de Laboratório nº 3 Dinâmica de um braço robot flexível Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de
1 Resid. MATLAB Function Extended Kalman Filter. z Previous xhat and Covariance Matrix. Joint Sensor1-30. Angle -32
 Sistemas e Sinais Measurements Zero-Order Hold MATLAB Function Extended Kalman Filter emu Resid. -4-6 -8 Power Spectral Density Hamming kaiser Chebyshev deltat Update Time Env Ground B F Revolute CS CS2
Sistemas e Sinais Measurements Zero-Order Hold MATLAB Function Extended Kalman Filter emu Resid. -4-6 -8 Power Spectral Density Hamming kaiser Chebyshev deltat Update Time Env Ground B F Revolute CS CS2
Controlo Em Espaço de Estados. Trabalho de Laboratório nº 1 Dinâmica no Espaço de Estados
 Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 1 Dinâmica no Espaço de Estados Objectivos Após realizar este trabalho, o aluno
Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 1 Dinâmica no Espaço de Estados Objectivos Após realizar este trabalho, o aluno
EES-20: Sistemas de Controle II. 31 Julho 2017
 EES-20: Sistemas de Controle II 31 Julho 2017 1 / 41 Folha de informações sobre o curso 2 / 41 O que é Controle? Controlar: Atuar sobre um sistema físico de modo a obter um comportamento desejado. 3 /
EES-20: Sistemas de Controle II 31 Julho 2017 1 / 41 Folha de informações sobre o curso 2 / 41 O que é Controle? Controlar: Atuar sobre um sistema físico de modo a obter um comportamento desejado. 3 /
APLICAÇÃO DO FILTRO DE KALMAN A UM SISTEMA DE POSICIONAMENTO DE VEÍCULO AQUÁTICO
 APLICAÇÃO DO FILTRO DE KALMAN A UM SISTEMA DE POSICIONAMENTO DE VEÍCULO AQUÁTICO André TEIXEIRA DE AQUINO; André LUIZ CARNEIRO DE ARAÚJO (1) Instituto Federal de Educação, Ciência e Tecnologia do Ceará,
APLICAÇÃO DO FILTRO DE KALMAN A UM SISTEMA DE POSICIONAMENTO DE VEÍCULO AQUÁTICO André TEIXEIRA DE AQUINO; André LUIZ CARNEIRO DE ARAÚJO (1) Instituto Federal de Educação, Ciência e Tecnologia do Ceará,
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
Denominação O Problema Um pouco de História Motivação Pré-requisitos Conceitos Bibliografia Recursos na Internet C. Capítulo 1. Gustavo H. C.
 Capítulo 1 Introdução Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Introdução 1/32 Este material contém notas de aula
Capítulo 1 Introdução Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Introdução 1/32 Este material contém notas de aula
EES-20: Sistemas de Controle II. 22 Setembro 2017
 EES-2: Sistemas de Controle II 22 Setembro 217 1 / 33 Controle empregando estado estimado na presença de perturbações e ruído de medida Modelo da planta e do sensor: ẋ = Ax + Bu + Gw y = Cx + v Observador
EES-2: Sistemas de Controle II 22 Setembro 217 1 / 33 Controle empregando estado estimado na presença de perturbações e ruído de medida Modelo da planta e do sensor: ẋ = Ax + Bu + Gw y = Cx + v Observador
SEM Sistemas de Controle I Aula 1 - Introdução
 SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM Sistemas de Controle I Aula 1 - Introdução
 SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
SEM 536 - Sistemas de Controle I Universidade de São Paulo O que é controle? Dicionário Houaiss: Controle:... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho
APRESENTAÇÃO.
 APRESENTAÇÃO OBJECTIVOS estímulo entrada Processo resposta saída Modificar o comportamento do sistema (processo) Fazer com que a saída do sistema (processo) siga uma entrada de referência Objectivo da
APRESENTAÇÃO OBJECTIVOS estímulo entrada Processo resposta saída Modificar o comportamento do sistema (processo) Fazer com que a saída do sistema (processo) siga uma entrada de referência Objectivo da
Estratégias de Controlo
 1 Estratégias de Controlo Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que
1 Estratégias de Controlo Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que
RAMO DE AUTOMAÇÃO E ROBÓTICA
 Projecto. nº M1 Título: Controlo de Robô Manipulador com Elos Flexíveis Docente acompanhante: Eng. Jorge Martins Áreas do tema: Robótica Desenvolvimento, implementação e teste de algoritmos de controlo
Projecto. nº M1 Título: Controlo de Robô Manipulador com Elos Flexíveis Docente acompanhante: Eng. Jorge Martins Áreas do tema: Robótica Desenvolvimento, implementação e teste de algoritmos de controlo
5. Síntese de leis de controlo usando técnicas polinomiais
 1 5. Síntese de leis de controlo usando técnicas polinomiais Objectivo: Projectar controladores discretos lineares por colocação de pólos, recorrendo a descrições entrada/saída do processo Referência:
1 5. Síntese de leis de controlo usando técnicas polinomiais Objectivo: Projectar controladores discretos lineares por colocação de pólos, recorrendo a descrições entrada/saída do processo Referência:
Arquitectura de Computadores
 Arquitectura de Computadores José Monteiro Licenciatura em Engenharia Informática e de Computadores Departamento de Engenharia Informática (DEI) Instituto Superior Técnico 14 de Fevereiro, 2013 José Monteiro
Arquitectura de Computadores José Monteiro Licenciatura em Engenharia Informática e de Computadores Departamento de Engenharia Informática (DEI) Instituto Superior Técnico 14 de Fevereiro, 2013 José Monteiro
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA
 CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
Controle Ótimo - Aula 8 Equação de Hamilton-Jacobi
 Controle Ótimo - Aula 8 Equação de Hamilton-Jacobi Adriano A. G. Siqueira e Marco H. Terra Departamento de Engenharia Elétrica Universidade de São Paulo - São Carlos O problema de controle ótimo Considere
Controle Ótimo - Aula 8 Equação de Hamilton-Jacobi Adriano A. G. Siqueira e Marco H. Terra Departamento de Engenharia Elétrica Universidade de São Paulo - São Carlos O problema de controle ótimo Considere
MODELAÇÃO E SIMULAÇÃO MEEC IST, TESTE N0.1 TIPO V02. Consider o sistema dinâmico descrito pela equação diferencial
 MODELAÇÃO E SIMULAÇÃO - 2018 MEEC IST, TESTE N0.1 TIPO V02 Problema No.1 [5v] Análise de Sistemas Não Lineares Consider o sistema dinâmico descrito pela equação diferencial dx = x (x 1) +u (1) onde u é
MODELAÇÃO E SIMULAÇÃO - 2018 MEEC IST, TESTE N0.1 TIPO V02 Problema No.1 [5v] Análise de Sistemas Não Lineares Consider o sistema dinâmico descrito pela equação diferencial dx = x (x 1) +u (1) onde u é
1. Estudo do pêndulo
 Objectivos odelizar um pêndulo invertido rígido de comprimento e massa, supondo uma entrada de binário. Simular em computador. entar estabilizar o pêndulo em ciclo aberto por manipulação directa do binário.
Objectivos odelizar um pêndulo invertido rígido de comprimento e massa, supondo uma entrada de binário. Simular em computador. entar estabilizar o pêndulo em ciclo aberto por manipulação directa do binário.
Control Design and Simulation
 Control Design and Simulation Controller Plant Setpoint + _ Error G(s) H(s) Output Rodrigo Schneiater Engenheiro de Vendas Osvaldo Santos Engenheiro de Sistemas LabVIEW Control Design and Simulation: LabVIEW
Control Design and Simulation Controller Plant Setpoint + _ Error G(s) H(s) Output Rodrigo Schneiater Engenheiro de Vendas Osvaldo Santos Engenheiro de Sistemas LabVIEW Control Design and Simulation: LabVIEW
Aula 03: Simulação computacional de sistemas dinâmicos por meio do Matlab/Simulink - Parte 1. DELT-UFPR
 II II Aula 03: por meio do Matlab/Simulink - Parte 1 kuiava@eletrica.ufpr.br DELT-UFPR 1 / 13 II Como podemos obter a resposta de um sistema dinâmico através do Matlab/Simulink? 1) Construir um diagrama
II II Aula 03: por meio do Matlab/Simulink - Parte 1 kuiava@eletrica.ufpr.br DELT-UFPR 1 / 13 II Como podemos obter a resposta de um sistema dinâmico através do Matlab/Simulink? 1) Construir um diagrama
Terminologia: Tipos de Variáveis
 Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que queremos manter nos valores
Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que queremos manter nos valores
SINAIS E SISTEMAS MECATRÓNICOS
 SINAIS E SISTEMAS MECATRÓNICOS Laboratório #4 1 : Projecto, implementação e validação da cadeia de actuação e medida Mestrado Integrado em Engenharia Mecânica Novembro 2011 ou Dezembro 2011 Realizar na
SINAIS E SISTEMAS MECATRÓNICOS Laboratório #4 1 : Projecto, implementação e validação da cadeia de actuação e medida Mestrado Integrado em Engenharia Mecânica Novembro 2011 ou Dezembro 2011 Realizar na
UNIVERSIDADE FEDERAL DE LAVRAS PRÓ-REITORIA DE GRADUAÇÃO. Currículo Pleno
 UNIVERSIDADE FEDERAL DE LAVRAS PRÓ-REITORIA DE GRADUAÇÃO Currículo Pleno Curso: G022 - Engenharia de Controle e Automação (Bacharelado) Base Curricular: 2013/02 Disciplinas Obrigatórias Código Nome Período
UNIVERSIDADE FEDERAL DE LAVRAS PRÓ-REITORIA DE GRADUAÇÃO Currículo Pleno Curso: G022 - Engenharia de Controle e Automação (Bacharelado) Base Curricular: 2013/02 Disciplinas Obrigatórias Código Nome Período
Aula 15 Comunicação, Cooperação e Coordenação
 Portfolio MEEC 1 Aula 15 Comunicação, Cooperação e Coordenação Objectivos Introdução ao conceito de Coordenação. Exemplo baseado na comunicação através do Bluetooth entre dois robots NXT.. Portfolio MEEC
Portfolio MEEC 1 Aula 15 Comunicação, Cooperação e Coordenação Objectivos Introdução ao conceito de Coordenação. Exemplo baseado na comunicação através do Bluetooth entre dois robots NXT.. Portfolio MEEC
7.O Problema Linear Quadrático
 7.O Problema Linear Quadrático Objectivo: Introduzir o Problema Linear Quadrático e os elementos básicos da sua solução. Mostrar que o controlo resultante estabiliza a cadeia fechada. Dinâmica: Formulação
7.O Problema Linear Quadrático Objectivo: Introduzir o Problema Linear Quadrático e os elementos básicos da sua solução. Mostrar que o controlo resultante estabiliza a cadeia fechada. Dinâmica: Formulação
Computação e Programação. MEMec - LEAN 1º Semestre
 Computação e Programação MEMec - LEAN 1º Semestre 2010-2011 Instituto Superior Técnico, Dep. de Engenharia Mecânica - ACCAII Objectivos de CP Pretende-se promover o desenvolvimento de, Competências que
Computação e Programação MEMec - LEAN 1º Semestre 2010-2011 Instituto Superior Técnico, Dep. de Engenharia Mecânica - ACCAII Objectivos de CP Pretende-se promover o desenvolvimento de, Competências que
PESQUISA EM ANDAMENTO
 ISSN 43-888 Empresa Brasileira de Pesquisa Agropecuária Centro Nacional de Pesquisa e Desenvolvimento de Instrumentação Agropecuária Ministério da Agricultura e do Abastecimento Rua XV de Novembro, 45
ISSN 43-888 Empresa Brasileira de Pesquisa Agropecuária Centro Nacional de Pesquisa e Desenvolvimento de Instrumentação Agropecuária Ministério da Agricultura e do Abastecimento Rua XV de Novembro, 45
Análise Dinâmica de Sistemas Mecânicos e Controle
 Análise Dinâmica de Sistemas Mecânicos e Controle Unidade 2 Representação de sistemas Através de Diagramas e Espaço de Estados Prof. Thiago da Silva Castro thiago.castro@ifsudestemg.edu.br 1. Representação
Análise Dinâmica de Sistemas Mecânicos e Controle Unidade 2 Representação de sistemas Através de Diagramas e Espaço de Estados Prof. Thiago da Silva Castro thiago.castro@ifsudestemg.edu.br 1. Representação
Parte I. 1 Introdução. Conceitos. Sistemas Dinâmico Estáticos Dinâmica dos Sistemas Modelo matemático Modelo Físico
 Parte I 2 ā Aula Introdução Conceitos Sistemas Dinâmico Estáticos Dinâmica dos Sistemas Modelo matemático Modelo Físico Construção de Modelos Matemáticos Procedimentos de projeto Análise e Síntese Exemplo
Parte I 2 ā Aula Introdução Conceitos Sistemas Dinâmico Estáticos Dinâmica dos Sistemas Modelo matemático Modelo Físico Construção de Modelos Matemáticos Procedimentos de projeto Análise e Síntese Exemplo
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA I. INTRODUÇÃO MPS-43: SISTEMAS DE CONTROLE Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica http://www.professordavisantos.com
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA I. INTRODUÇÃO MPS-43: SISTEMAS DE CONTROLE Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica http://www.professordavisantos.com
DISCIPLINA DE LABORATÓRIOS INTEGRADOS II
 DISCIPLINA DE LABORATÓRIOS INTEGRADOS II Engenharia Electrónica Industrial Ano Lectivo 1999/2000 DOCENTES: Cristina Santos, Gerardo Rocha, Graça Minas, José Mendes, Paulo Mendes APRESENTAÇÃO 1. Objectivos
DISCIPLINA DE LABORATÓRIOS INTEGRADOS II Engenharia Electrónica Industrial Ano Lectivo 1999/2000 DOCENTES: Cristina Santos, Gerardo Rocha, Graça Minas, José Mendes, Paulo Mendes APRESENTAÇÃO 1. Objectivos
Portfolio MEEC 1. Portfolio MEEC. J. Miranda Lemos. Professor Catedrático do IST 2014/2015
 Portfolio MEEC 1 Portfolio MEEC J. Miranda Lemos Professor Catedrático do IST 2014/2015 Portfolio MEEC 2 Aula 1 Apresentação da unidade curricular Objectivos Apresentação dos objectivos, conteúdo, organização
Portfolio MEEC 1 Portfolio MEEC J. Miranda Lemos Professor Catedrático do IST 2014/2015 Portfolio MEEC 2 Aula 1 Apresentação da unidade curricular Objectivos Apresentação dos objectivos, conteúdo, organização
ESPECIALIZAÇÃO EM ESTRUTURAS
 Mestrado Integrado em Engenharia Civil 2017-2018 Sumário 1. Características do perfil 2. Saídas profissionais 2 34 3. Características genéricas do programa curricular 4. Disciplinas do programa curricular
Mestrado Integrado em Engenharia Civil 2017-2018 Sumário 1. Características do perfil 2. Saídas profissionais 2 34 3. Características genéricas do programa curricular 4. Disciplinas do programa curricular
ENGENHARIA MECATRÔNICA 2017/1 1º PERÍODO - NOTURNO
 ENGENHARIA MECATRÔNICA 2017/1 1º PERÍODO - NOTURNO 18h00-18h55 19h00 19h55 19h55 20h50 Química Geral Exp. (GrupoA) Química Geral Exp. (Grupo B) Química Geral Teoria AEDS l - Lab A Química Geral Teórica
ENGENHARIA MECATRÔNICA 2017/1 1º PERÍODO - NOTURNO 18h00-18h55 19h00 19h55 19h55 20h50 Química Geral Exp. (GrupoA) Química Geral Exp. (Grupo B) Química Geral Teoria AEDS l - Lab A Química Geral Teórica
Controle Preditivo com Múltiplos Modelos para a Acomodação de Falhas
 Instituto Tecnológico de Aeronáutica Divisão de Engenharia Eletrônica Departamento de Sistemas e Controle Tese de Mestrado Controle Preditivo com Múltiplos Modelos para a Acomodação de Falhas Mariana Santos
Instituto Tecnológico de Aeronáutica Divisão de Engenharia Eletrônica Departamento de Sistemas e Controle Tese de Mestrado Controle Preditivo com Múltiplos Modelos para a Acomodação de Falhas Mariana Santos
EES-20: Sistemas de Controle II. 02 Outubro 2017
 EES-20: Sistemas de Controle II 02 Outubro 2017 1 / 39 Recapitulando Ementa de EES-20 Relações entre as equações de estado e a função de transferência. Realizações de funções de transferência. Análise
EES-20: Sistemas de Controle II 02 Outubro 2017 1 / 39 Recapitulando Ementa de EES-20 Relações entre as equações de estado e a função de transferência. Realizações de funções de transferência. Análise
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1
 ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
Professor(a): Iury Valente de Bessa Departamento: Eletricidade Unidade: FT. Disciplina: Laboratório de Sistemas de Controle Código: FTE030
: Iury Valente de Bessa Departamento: Eletricidade Unidade: FT. Disciplina: Laboratório de Sistemas de Controle Código: FTE030") 1. IDENTIFICAÇÃO Professor(a): Iury Valente de Bessa Departamento: Eletricidade Unidade: FT Disciplina: Laboratório de Sistemas de Controle Código: FTE030 Nº de créditos: 1.0.1 Carga Teórica Semanal (h):
1. IDENTIFICAÇÃO Professor(a): Iury Valente de Bessa Departamento: Eletricidade Unidade: FT Disciplina: Laboratório de Sistemas de Controle Código: FTE030 Nº de créditos: 1.0.1 Carga Teórica Semanal (h):
EES-20: Sistemas de Controle II
 EES-: Sistemas de Controle II 14 Agosto 17 1 / 49 Recapitulando: Estabilidade interna assintótica Modelo no espaço de estados: Equação de estado: ẋ = Ax + Bu Equação de saída: y = Cx + Du Diz-se que o
EES-: Sistemas de Controle II 14 Agosto 17 1 / 49 Recapitulando: Estabilidade interna assintótica Modelo no espaço de estados: Equação de estado: ẋ = Ax + Bu Equação de saída: y = Cx + Du Diz-se que o
Equações Diferenciais Ordinárias
 Licenciatura em Engenharia Electrotécnica e de Computadores Análise Numérica 2004/2005 Equações Diferenciais Ordinárias PROBLEMAS 1 Considere a equação diferencial dy dx = y(x2 1) com y(0) = 1 e x [0,
Licenciatura em Engenharia Electrotécnica e de Computadores Análise Numérica 2004/2005 Equações Diferenciais Ordinárias PROBLEMAS 1 Considere a equação diferencial dy dx = y(x2 1) com y(0) = 1 e x [0,
APRESENTAÇÃO DA DISCIPLINA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA I. INTRODUÇÃO MPS-43: SISTEMAS DE CONTROLE Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica www.mec.ita.br/~davists
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA I. INTRODUÇÃO MPS-43: SISTEMAS DE CONTROLE Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica www.mec.ita.br/~davists
FICHA DA DISCIPLINA. Anual Semestral Opcional Obrigatória. Créditos ECTS 0.13
 FICHA DA DISCIPLINA ESCOLA SUPERIOR DE TECNOLOGIA E GESTÃO DE FELGUEIRAS CURSO ENGENHARIA INFORMÁTICA Disciplina: Concepção e Manufactura Assistida por Computador Anual Semestral Opcional Obrigatória Ano
FICHA DA DISCIPLINA ESCOLA SUPERIOR DE TECNOLOGIA E GESTÃO DE FELGUEIRAS CURSO ENGENHARIA INFORMÁTICA Disciplina: Concepção e Manufactura Assistida por Computador Anual Semestral Opcional Obrigatória Ano
Utilização do solidthinking Embed em projetos de controle para sistemas embarcados utilizando técnica de controle adaptativo por modelo de referência.
 Utilização do solidthinking Embed em projetos de controle para sistemas embarcados utilizando técnica de controle adaptativo por modelo de referência. Rodrigo de J. Macedo Resumo Apresenta-se, neste artigo,
Utilização do solidthinking Embed em projetos de controle para sistemas embarcados utilizando técnica de controle adaptativo por modelo de referência. Rodrigo de J. Macedo Resumo Apresenta-se, neste artigo,
Grade Horária da Engenharia Química - 1º Sem 2016
 Grade Horária da Engenharia Química - 1º Sem 2016 1º PERÍODO NOTURNO 2016 Química Geral (Tuma B) Calculo Diferencial e Integral I Calculo Diferencial e Integral I Introdução à Engenharia Química Metodologia
Grade Horária da Engenharia Química - 1º Sem 2016 1º PERÍODO NOTURNO 2016 Química Geral (Tuma B) Calculo Diferencial e Integral I Calculo Diferencial e Integral I Introdução à Engenharia Química Metodologia
Controle Ótimo e Filtro de Kalman - Estabilizador 2
 Capítulo 4 Controle Ótimo e Filtro de Kalman - Estabilizador 2 O principal objetivo deste capítulo é definir o conceito de controle ótimo e de filtro de Kalman. Por otimização, podemos encontrar tanto
Capítulo 4 Controle Ótimo e Filtro de Kalman - Estabilizador 2 O principal objetivo deste capítulo é definir o conceito de controle ótimo e de filtro de Kalman. Por otimização, podemos encontrar tanto
Aula 12 Simulação em computador
 Portfolio MEEC 1 Aula 12 Simulação em computador Objectivos Introdução ao conceito de modelo e simulação em computador, usando um exemplo muito simples baseado no NXT. Portfolio MEEC 2 Por vezes é inadequado
Portfolio MEEC 1 Aula 12 Simulação em computador Objectivos Introdução ao conceito de modelo e simulação em computador, usando um exemplo muito simples baseado no NXT. Portfolio MEEC 2 Por vezes é inadequado
Controlo de Sistemas Não-lineares
 Controlo em Espaço de Estados Controlo de Sistemas Não Lineares Controlo de Sistemas Não-lineares J. Miranda Lemos Professor Catedrático do IST 0 Controlo em Espaço de Estados Controlo de Sistemas Não
Controlo em Espaço de Estados Controlo de Sistemas Não Lineares Controlo de Sistemas Não-lineares J. Miranda Lemos Professor Catedrático do IST 0 Controlo em Espaço de Estados Controlo de Sistemas Não
SEM Sistemas de Controle. Aula 4 - Controladores PID, Avanço, Atraso, Esp. Estados
 SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
Sinais e Sistemas Mecatrónicos
 Sinais e Sistemas Mecatrónicos Modelação de Sistemas Físicos Variáveis e Elementos do Sistema José Sá da Costa José Sá da Costa T4 - Modelação de Sistemas Físicos 1 Modelação de Sistemas Físicos Sinais
Sinais e Sistemas Mecatrónicos Modelação de Sistemas Físicos Variáveis e Elementos do Sistema José Sá da Costa José Sá da Costa T4 - Modelação de Sistemas Físicos 1 Modelação de Sistemas Físicos Sinais
1 Sistema Máquina-Barra in nita: apresentação e modelagem
 EEL 751 - Fundamentos de Controle 1o rabalho Computacional 1 Sistema Máquina-Barra in nita: apresentação e modelagem Modelos do tipo máquina-barra in nita como o representado pelo diagrama uni - lar da
EEL 751 - Fundamentos de Controle 1o rabalho Computacional 1 Sistema Máquina-Barra in nita: apresentação e modelagem Modelos do tipo máquina-barra in nita como o representado pelo diagrama uni - lar da
Dinâmica de um metrónomo básico
 Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
d 2 e = d 1 dt =v * v 2
 MODELAÇÃO E SIMULAÇÃO TESTE No. 2 TIPO V02 2016 MEEC IST QUESTÕES-TIPO PARA O TESTE N0. 2 PROBLEMA N0.1 Estabilidade de Sistemas Não Lineares (Teoria de Lyapunov) Pretende-se coordenar o movimento de dois
MODELAÇÃO E SIMULAÇÃO TESTE No. 2 TIPO V02 2016 MEEC IST QUESTÕES-TIPO PARA O TESTE N0. 2 PROBLEMA N0.1 Estabilidade de Sistemas Não Lineares (Teoria de Lyapunov) Pretende-se coordenar o movimento de dois
PQI-2407 CONTROLE DE PROCESSOS QUÍMICOS. Professor: Darci Odloak Ano: 2009
 PQI-407 CONTROLE DE PROCESSOS QUÍMICOS Professor: Darci Odloak no: 009 1 PQI-407 CONTROLE DE PROCESSOS QUÍMICOS O objetivo é introduzir os conceitos básicos para o entendimento das malhas de controle Porque
PQI-407 CONTROLE DE PROCESSOS QUÍMICOS Professor: Darci Odloak no: 009 1 PQI-407 CONTROLE DE PROCESSOS QUÍMICOS O objetivo é introduzir os conceitos básicos para o entendimento das malhas de controle Porque
Sistemas de Controle de Aeronaves
 Sistemas de Controle de Aeronaves AB-722 Flávio Luiz Cardoso Ribeiro http://flavioluiz.github.io flaviocr@ita.br Departamento de Mecânica do Voo Divisão de Engenharia Aeronáutica e Aeroespacial Instituto
Sistemas de Controle de Aeronaves AB-722 Flávio Luiz Cardoso Ribeiro http://flavioluiz.github.io flaviocr@ita.br Departamento de Mecânica do Voo Divisão de Engenharia Aeronáutica e Aeroespacial Instituto
CIRCUITOS E SISTEMAS ELECTRÓNICOS
 INSTITUTO SUPERIOR DE CIÊNCIAS DO TRABALHO E DA EMPRESA Enunciado do 3º Trabalho de Laboratório CIRCUITOS E SISTEMAS ELECTRÓNICOS MODELAÇÃO E SIMULAÇÃO DE FILTROS ANALÓGICOS Índice Objectivos e regras
INSTITUTO SUPERIOR DE CIÊNCIAS DO TRABALHO E DA EMPRESA Enunciado do 3º Trabalho de Laboratório CIRCUITOS E SISTEMAS ELECTRÓNICOS MODELAÇÃO E SIMULAÇÃO DE FILTROS ANALÓGICOS Índice Objectivos e regras
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO. CURSO Engenharia Elétrica MATRIZ 548
 Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 003/11, aprovado pela Resolução n.
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Medianeira PLANO DE ENSINO CURSO Engenharia Elétrica MATRIZ 548 FUNDAMENTAÇÃO LEGAL Processo N 003/11, aprovado pela Resolução n.
PERÍODO LETIVO ENGENHARIA DE COMPUTAÇÃO
 2 O SEMESTRE DE 2019 2 o PERÍODO LETIVO SMA0354 Cálculo II 760006 Física II SQM0405 Química Geral e Experimental 760006 Física II SMA0354 Cálculo II 7600110 Laboratório de Física Geral II Turmas aulas
2 O SEMESTRE DE 2019 2 o PERÍODO LETIVO SMA0354 Cálculo II 760006 Física II SQM0405 Química Geral e Experimental 760006 Física II SMA0354 Cálculo II 7600110 Laboratório de Física Geral II Turmas aulas
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 3 a Série (root-locus, análise e projecto no plano-s) As questões assinaladas com * serão abordadas na correspondente aula
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 3 a Série (root-locus, análise e projecto no plano-s) As questões assinaladas com * serão abordadas na correspondente aula
MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1
 MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1 Gustavo Cordeiro Dos Santos 2, Luis Fernando Sauthier 3, Manuel Martín Pérez Reimbold 4, Airam Teresa Zago Romcy Sausen 5, Paulo Sérgio Sausen 6. 1
MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1 Gustavo Cordeiro Dos Santos 2, Luis Fernando Sauthier 3, Manuel Martín Pérez Reimbold 4, Airam Teresa Zago Romcy Sausen 5, Paulo Sérgio Sausen 6. 1
DGES DIRECÇÃO GERAL DO ENSINO SUPERIOR MINISTÉRIO DA CIÊNCIA, TECNOLOGIA E ENSINO SUPERIOR FORMULÁRIO
 FORMULÁRIO 1. Estabelecimento de ensino: Universidade Técnica de Lisboa 2. Unidade orgânica (faculdade, escola, instituto, etc.): Instituto Superior Técnico 3. Curso: Mestrado em Engenharia Mecânica 4.
FORMULÁRIO 1. Estabelecimento de ensino: Universidade Técnica de Lisboa 2. Unidade orgânica (faculdade, escola, instituto, etc.): Instituto Superior Técnico 3. Curso: Mestrado em Engenharia Mecânica 4.
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II PROF. MARCOS LAJOVIC CARNEIRO - 2017/1 Turma A01/1 PLANO
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO MECATRÔNICA ENG3502 SISTEMAS DE CONTROLE II PROF. MARCOS LAJOVIC CARNEIRO - 2017/1 Turma A01/1 PLANO
6. Predição Linear e Controlo de Variância Mínima
 1 6. Predição Linear e Controlo de Variância Mínima Objectivo: Projectar controladores discretos lineares para sistemas com perturbações estocásticas. Preparação para o Controlo Adaptativo. Referência:
1 6. Predição Linear e Controlo de Variância Mínima Objectivo: Projectar controladores discretos lineares para sistemas com perturbações estocásticas. Preparação para o Controlo Adaptativo. Referência:
Teoria de Sistemas Lineares
 Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Plano para a comunicação
 Faculdade de Engenharia da Universidade do Porto Departamento de Engenharia Química Instituto de Sistemas e Robótica - a evolução necessária na produção industrial Sebastião Feyo de Azevedo E-mail: sfeyo@fe.up.pt
Faculdade de Engenharia da Universidade do Porto Departamento de Engenharia Química Instituto de Sistemas e Robótica - a evolução necessária na produção industrial Sebastião Feyo de Azevedo E-mail: sfeyo@fe.up.pt
RESOLUÇÃO Nº XX/XX - CEPE RESOLVE:
 RESOLUÇÃO Nº XX/XX - CEPE Estabelece o Currículo Pleno do Curso Noturno de Engenharia Elétrica, Ênfase em Sistemas Eletrônicos Embarcados, do Setor de Tecnologia. O CONSELHO DE ENSINO, PESQUISA E EXTENSÃO,
RESOLUÇÃO Nº XX/XX - CEPE Estabelece o Currículo Pleno do Curso Noturno de Engenharia Elétrica, Ênfase em Sistemas Eletrônicos Embarcados, do Setor de Tecnologia. O CONSELHO DE ENSINO, PESQUISA E EXTENSÃO,
EP34D Fenômenos de Transporte
 EP34D Fenômenos de Transporte Prof. Dr. André Damiani Rocha arocha@utfpr.edu.br Transferência de Calor em Superfícies Estendidas - Aletas 2 É desejável em muitas aplicações industriais aumentar a taxa
EP34D Fenômenos de Transporte Prof. Dr. André Damiani Rocha arocha@utfpr.edu.br Transferência de Calor em Superfícies Estendidas - Aletas 2 É desejável em muitas aplicações industriais aumentar a taxa
Modelação, Identificação e Controlo Digital 2003/04 Segundo Exame
 Lic. Em Engª Electrotécnica e de Computadores Modelação, Identificação e Controlo Digital 003/04 Segundo Exame 4 de Fevereiro de 004, 9 horas - sala E5 Quotação: P-4, P-4, P3-4, P4-3, P5-3, P6-. P Considere
Lic. Em Engª Electrotécnica e de Computadores Modelação, Identificação e Controlo Digital 003/04 Segundo Exame 4 de Fevereiro de 004, 9 horas - sala E5 Quotação: P-4, P-4, P3-4, P4-3, P5-3, P6-. P Considere
Controle Ótimo - Aula 10 Princípio do Mínimo de Pontryagin
 Controle Ótimo - Aula 10 Princípio do Mínimo de Pontryagin Adriano A. G. Siqueira e Marco H. Terra Departamento de Engenharia Elétrica Universidade de São Paulo - São Carlos O problema de controle ótimo
Controle Ótimo - Aula 10 Princípio do Mínimo de Pontryagin Adriano A. G. Siqueira e Marco H. Terra Departamento de Engenharia Elétrica Universidade de São Paulo - São Carlos O problema de controle ótimo
IF-705 Automação Inteligente Sistemas de Controle - Fundamentos
 IF-705 Automação Inteligente Sistemas de Controle - Fundamentos Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br
IF-705 Automação Inteligente Sistemas de Controle - Fundamentos Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br
Modelação, Identificação e Controlo Digital
 Modelação, Identificação e Controlo Digital 1-Aspectos Gerais 1 Modelação, Identificação e Controlo Digital Semestre de Inverno 2005/2006 Área Científica de Sistemas de Decisão e Controlo Modelação, Identificação
Modelação, Identificação e Controlo Digital 1-Aspectos Gerais 1 Modelação, Identificação e Controlo Digital Semestre de Inverno 2005/2006 Área Científica de Sistemas de Decisão e Controlo Modelação, Identificação
Análise e Síntese de Algoritmos.
 Análise e Síntese de Algoritmos http://fenix.ist.utl.pt/leic-a/disciplinas/asa Corpo Docente Aulas Teóricas: Vasco Manquinho INESC-ID, Sala 329 Email: vasco.manquinho@inesc-id.pt Tel: 21 3100204 (INESC-ID)
Análise e Síntese de Algoritmos http://fenix.ist.utl.pt/leic-a/disciplinas/asa Corpo Docente Aulas Teóricas: Vasco Manquinho INESC-ID, Sala 329 Email: vasco.manquinho@inesc-id.pt Tel: 21 3100204 (INESC-ID)
Dinâmica de um metrónomo básico
 Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
CONTROLO. 2º semestre 2007/2008. Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente
 CONTROLO 2º semestre 2007/2008 Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente Maria Isabel Ribeiro António Pascoal Maio de 2008 Todos os direitos
CONTROLO 2º semestre 2007/2008 Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente Maria Isabel Ribeiro António Pascoal Maio de 2008 Todos os direitos
Aula 07: Simulação de sistemas não-lineares e linearizados utilizando o Simulink.
 UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CURSO DE ENGENHARIA ELÉTRICA DISCIPLINA: INTRODUÇÃO AOS SISTEMAS DE CONTROLE PROFESSOR: ANTONIO SILVEIRA (MATERIAL CEDIDO PELA PROFA. MARIANA SANTOS MATOS
UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CURSO DE ENGENHARIA ELÉTRICA DISCIPLINA: INTRODUÇÃO AOS SISTEMAS DE CONTROLE PROFESSOR: ANTONIO SILVEIRA (MATERIAL CEDIDO PELA PROFA. MARIANA SANTOS MATOS
Programação. Corpo Docente Página da disciplina Funcionamento Avaliação Suporte informático. Aulas teóricas/problemas
 Programação https://fenix.ist.utl.pt/disciplinas/pro364/ deec-prog@disciplinas.ist.utl.pt Sumário Corpo Docente Página da disciplina Funcionamento Avaliação Suporte informático 01-2 Corpo Docente Aulas
Programação https://fenix.ist.utl.pt/disciplinas/pro364/ deec-prog@disciplinas.ist.utl.pt Sumário Corpo Docente Página da disciplina Funcionamento Avaliação Suporte informático 01-2 Corpo Docente Aulas
SEM 538 Sistemas de Controle II
 SEM 538 Sistemas de Controle II - 07 Prof.: Adriano Almeida Gonçalves Siqueira Descrição: Sistemas discretos no tempo, equações a diferenças. Transformada Z e transformações de sistemas contínuos para
SEM 538 Sistemas de Controle II - 07 Prof.: Adriano Almeida Gonçalves Siqueira Descrição: Sistemas discretos no tempo, equações a diferenças. Transformada Z e transformações de sistemas contínuos para
Sistemas Dinâmicos Lineares
 Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Faculdade do Centro Leste 1º PERÍODO DE ENGENHARIA OPÇÃO A NOTURNO /2
 1º PERÍODO DE ENGENHARIA OPÇÃO A Cálculo I* / Introdução ao Cálculo* 87/104 Projeto Interdisciplinar de Engenharia I* 92 Lógica Matemática e Computacional* 340 Geometria Analítica 91 Desenho Técnico 88
1º PERÍODO DE ENGENHARIA OPÇÃO A Cálculo I* / Introdução ao Cálculo* 87/104 Projeto Interdisciplinar de Engenharia I* 92 Lógica Matemática e Computacional* 340 Geometria Analítica 91 Desenho Técnico 88
Dinâmica de um metrónomo básico
 Modelação e Simulação 014/15 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 014/15 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
PLANO DE ENSINO. 1 Ementa
 PLANO DE ENSINO Engenharia de Controle e Automação Componente Curricular: Sistemas Não Lineares Turma: ECA 2013 Carga Horária: 60h Créditos: 4 Professor: Rafael Garlet de Oliveira Período: 2016/02 1 Ementa
PLANO DE ENSINO Engenharia de Controle e Automação Componente Curricular: Sistemas Não Lineares Turma: ECA 2013 Carga Horária: 60h Créditos: 4 Professor: Rafael Garlet de Oliveira Período: 2016/02 1 Ementa
ANÁLISE DE SISTEMAS LINEARES NO ESPAÇO DE ESTADOS
 AE- ANÁLISE DE SISTEMAS LINEARES NO ESPAÇO DE ESTADOS AE- Determine os valores e vectores próprios de a) A= -.5.5 -.5 b) B= - - AE- Forma canónica controlável. a) Mostre que a equação diferencial homogénea
AE- ANÁLISE DE SISTEMAS LINEARES NO ESPAÇO DE ESTADOS AE- Determine os valores e vectores próprios de a) A= -.5.5 -.5 b) B= - - AE- Forma canónica controlável. a) Mostre que a equação diferencial homogénea
Projeto de Controle Robusto à Falhas na Propulsão do Helicóptero 3-DOF da Quanser R
 Projeto de Controle Robusto à Falhas na Propulsão do Helicóptero 3-DOF da Quanser R Jefferson Leone e Silva, André Luiz A. de Paula, José Paulo F. Garcia, Lizete Marica C. F. Garcia Rodrigo Cardim e Marcelo
Projeto de Controle Robusto à Falhas na Propulsão do Helicóptero 3-DOF da Quanser R Jefferson Leone e Silva, André Luiz A. de Paula, José Paulo F. Garcia, Lizete Marica C. F. Garcia Rodrigo Cardim e Marcelo
superior 6.0, ou seja, 6.0 (1) 3 serão aprovados. Os conceitos serão atribuídos com base na tabela 1. M = P + T 1 + T 2
 3 serão aprovados. Os conceitos serão atribuídos com base na tabela 1. M = P + T 1 + T 2") UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PLANO DE ENSINO PERÍODO LETIVO 2018/1 DISCIPLINA: DINÂMICA E CONTROLE DE ROBÔS ENG1001
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE SISTEMAS ELÉTRICOS DE AUTOMAÇÃO E ENERGIA PLANO DE ENSINO PERÍODO LETIVO 2018/1 DISCIPLINA: DINÂMICA E CONTROLE DE ROBÔS ENG1001
Controlo Óptimo e Adaptativo
 Controlo Óptimo e Adaptativo 1-Aspectos Gerais 1 Controlo Óptimo e Adaptativo Licenciatura em Engenharia Aeroespacial J. Miranda Lemos Professor Catedrático do IST 2009 Controlo Óptimo e Adaptativo 1-Aspectos
Controlo Óptimo e Adaptativo 1-Aspectos Gerais 1 Controlo Óptimo e Adaptativo Licenciatura em Engenharia Aeroespacial J. Miranda Lemos Professor Catedrático do IST 2009 Controlo Óptimo e Adaptativo 1-Aspectos
Controlabilidade. Uma representação (ou realização) de um sistema dinâmico no espaço de estados:
 de um sistema dinâmico no espaço de estados:") Controlabilidade Uma representação (ou realização) de um sistema dinâmico no espaço de estados: x = Ax + Bu ou equivalentemente o par (A, B), é dito controlável (completamente controlável, de estado controlável)
Controlabilidade Uma representação (ou realização) de um sistema dinâmico no espaço de estados: x = Ax + Bu ou equivalentemente o par (A, B), é dito controlável (completamente controlável, de estado controlável)
6.Introdução ao Controlo Óptimo
 Introdução ao Controlo Óptimo 6.Introdução ao Controlo Óptimo J. Miranda Lemos Professor Catedrático do IST Introdução ao Controlo Óptimo Bibliografia Luenberger, D. (979). Introduction to Dynamic Models
Introdução ao Controlo Óptimo 6.Introdução ao Controlo Óptimo J. Miranda Lemos Professor Catedrático do IST Introdução ao Controlo Óptimo Bibliografia Luenberger, D. (979). Introduction to Dynamic Models
RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO
 ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO A12.1. Considerações Iniciais Inicialmente, é importante destacar que a Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia
ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO A12.1. Considerações Iniciais Inicialmente, é importante destacar que a Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia